
電動駆動車両
【課題】運転者が、どこまで走行させることができるかを知ることができ、安心して走行させる。
【解決手段】蓄電装置と、発電装置と、エンジンと、駆動モータと、現在地検出部と、電動駆動車両を走行させることができる道なりの走行可能経路を探索する経路探索処理手段と、距離当たり消費エネルギーに基づいて、走行可能時間を算出する走行可能時間算出処理手段と、走行可能距離を算出する走行可能距離算出処理手段と、走行可能範囲を算出する走行可能範囲算出処理手段と、走行可能範囲を表示部43に表示する走行可能範囲表示処理手段とを有する。
【解決手段】蓄電装置と、発電装置と、エンジンと、駆動モータと、現在地検出部と、電動駆動車両を走行させることができる道なりの走行可能経路を探索する経路探索処理手段と、距離当たり消費エネルギーに基づいて、走行可能時間を算出する走行可能時間算出処理手段と、走行可能距離を算出する走行可能距離算出処理手段と、走行可能範囲を算出する走行可能範囲算出処理手段と、走行可能範囲を表示部43に表示する走行可能範囲表示処理手段とを有する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、電動駆動車両に関するものである。
【背景技術】
【0002】
従来、電気自動車等の電動駆動車両、例えば、電気自動車は、車両駆動装置を備え、該車両駆動装置において、駆動モータをバッテリから供給される電力によって駆動し、駆動モータのトルク、すなわち、駆動モータトルクを発生させ、該駆動モータトルクを駆動輪に伝達することによって走行させられるようになっている。
【0003】
ところが、前記バッテリにおいては、単位重量当たりの容量を表すエネルギー密度を十分に高くすることができないので、バッテリから供給される電力を利用して電気自動車を走行させた場合、走行可能な距離を表す走行可能距離、走行可能な時間を表す走行可能時間等を長くすることができない。走行可能距離、走行可能時間等を長くするためにはバッテリの容量を大きくする必要があるが、その場合、バッテリが大型化するだけでなく、バッテリの重量が大きくなる。その結果、電気自動車が大型化し、電気自動車の重量が大きくなってしまう。
【0004】
そこで、走行可能距離、走行可能時間等を長くすることができるように、バッテリのほかに発電機を配設し、エンジンによって発電機を駆動して電流を発生させ、バッテリに供給するようにした電動駆動車両として、ハイブリッド型車両が提供されている。
【0005】
そして、該ハイブリッド型車両においては、バッテリの充電度合い(蓄電量)を表すバッテリ残量、エンジンを駆動するための燃料の残量、すなわち、燃料残量、及びハイブリッド型車両の過去の走行状況に基づいて走行可能距離が算出され、表示部に形成された画面に表示されるようになっている(例えば、特許文献1参照。)。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2001−231103号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
しかしながら、前記従来のハイブリッド型車両においては、発電機の出力をハイブリッド型車両に加わる走行負荷に対応させて調整する必要があるので、制御部における制御が複雑になるとともに、発電効率が低くなってしまう。
【0008】
そこで、発電機を発電効率が高い一定の出力で駆動するようにしたハイブリッド型車両が考えられるが、その場合、発電機を一定の出力で駆動するのに必要な時間、すなわち、必要発電時間がバッテリ残量によって異なるので、バッテリ残量及び発電による発電エネルギーに基づいて、走行可能距離を正確に算出することができない。
【0009】
したがって、目的地を設定することなくハイブリッド型車両を走行させる場合に、運転者は、どこまで走行させることができるかを知ることができず、安心してハイブリッド型車両を走行させることができない。
【0010】
本発明は、前記従来のハイブリッド型車両の問題点を解決して、運転者が、どこまで走行させることができるかを知ることができ、安心して走行させることができる電動駆動車両を提供することを目的とする。
【課題を解決するための手段】
【0011】
そのために、本発明の電動駆動車両においては、蓄電装置と、発電装置と、該発電装置を駆動するエンジンと、前記蓄電装置及び発電装置と接続され、蓄電装置及び発電装置から供給される電力によって駆動される駆動モータと、現在位置を検出する現在地検出部と、道路情報に基づいて、現在位置を出発地とし、電動駆動車両を走行させることができる道なりの経路を走行可能経路として探索する経路探索処理手段と、電動駆動車両を前記走行可能経路に沿って走行させる際に必要な消費パワーを算出し、該消費パワー及び平均車速に基づいて距離当たり消費エネルギーを算出する距離当たり消費エネルギー算出処理手段と、前記距離当たり消費エネルギーに基づいて、電動駆動車両を走行可能経路に沿って走行させることができる走行可能時間を算出する走行可能時間算出処理手段と、前記走行可能時間及び平均車速に基づいて走行可能距離を算出する走行可能距離算出処理手段と、前記走行可能距離に基づいて、電動駆動車両を走行可能経路に沿って走行させることができる走行可能範囲を算出する走行可能範囲算出処理手段と、前記走行可能範囲を表示部に表示する走行可能範囲表示処理手段とを有する。
【発明の効果】
【0012】
本発明によれば、電動駆動車両においては、蓄電装置と、発電装置と、該発電装置を駆動するエンジンと、前記蓄電装置及び発電装置と接続され、蓄電装置及び発電装置から供給される電力によって駆動される駆動モータと、現在位置を検出する現在地検出部と、道路情報に基づいて、現在位置を出発地とし、電動駆動車両を走行させることができる道なりの経路を走行可能経路として探索する経路探索処理手段と、電動駆動車両を前記走行可能経路に沿って走行させる際に必要な消費パワーを算出し、該消費パワー及び平均車速に基づいて距離当たり消費エネルギーを算出する距離当たり消費エネルギー算出処理手段と、前記距離当たり消費エネルギーに基づいて、電動駆動車両を走行可能経路に沿って走行させることができる走行可能時間を算出する走行可能時間算出処理手段と、前記走行可能時間及び平均車速に基づいて走行可能距離を算出する走行可能距離算出処理手段と、前記走行可能距離に基づいて、電動駆動車両を走行可能経路に沿って走行させることができる走行可能範囲を算出する走行可能範囲算出処理手段と、前記走行可能範囲を表示部に表示する走行可能範囲表示処理手段とを有する。
【0013】
この場合、距離当たり消費エネルギーに基づいて走行可能時間が算出され、該走行可能時間及び平均車速に基づいて走行可能距離が算出され、該走行可能距離に基づいて電動駆動車両を走行させることができる走行可能範囲が算出され、表示部に表示される。
【0014】
したがって、目的地を設定することなく電動駆動車両を走行させる場合に、運転者は、どこまで走行させることができるかを容易に知ることができ、安心して電動駆動車両を走行させることができる。
【図面の簡単な説明】
【0015】
【図1】本発明の第1の実施の形態における車両駆動装置を示す図である。
【図2】本発明の第1の実施の形態におけるハイブリッド型車両の概念図である。
【図3】本発明の第1の実施の形態における制御部の動作を示すメインフローチャートである。
【図4】本発明の第1の実施の形態における距離当たり消費エネルギー算出処理のサブルーチンを示す図である。
【図5】本発明の第1の実施の形態におけるHV走行可能時間算出処理のサブルーチンを示す図である。
【図6】本発明の第1の実施の形態におけるEV走行可能時間算出処理のサブルーチンを示す図である。
【図7】本発明の第1の実施の形態における走行パターン記録部の記録状態を示す第1の図である。
【図8】本発明の第1の実施の形態における走行パターン記録部の記録状態を示す第2の図である。
【図9】本発明の第1の実施の形態における探索経路の例を示す図である。
【図10】本発明の第1の実施の形態における表示部に表示される走行可能範囲の例を示す第1の図である。
【図11】本発明の第1の実施の形態における表示部に表示される走行可能範囲の例を示す第2の図である。
【図12】本発明の第1の実施の形態における表示部に表示される走行可能範囲の例を示す第3の図である。
【図13】本発明の第1の実施の形態における表示部に表示される走行可能範囲の例を示す第4の図である。
【図14】本発明の第1の実施の形態における表示部に表示される走行可能範囲の例を示す第5の図である。
【図15】本発明の第2の実施の形態における距離当たり消費エネルギー算出処理のサブルーチンを示す図である。
【発明を実施するための形態】
【0016】
以下、本発明の実施の形態について図面を参照しながら詳細に説明する。この場合、電動駆動車両としてのハイブリッド型車両について説明する。
【0017】
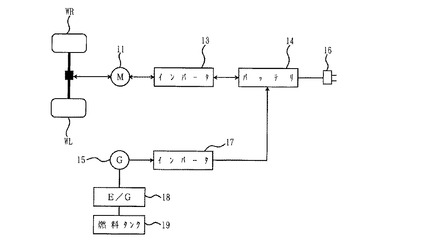
図2は本発明の第1の実施の形態におけるハイブリッド型車両の概念図である。
【0018】
図において、WL、WRは駆動輪として機能する車輪、11は該車輪WL、WRと接続された駆動源としての、かつ、第1の電動機械としての駆動モータ(M)である。該駆動モータ11を駆動することによって発生させられた駆動モータトルクを前記車輪WL、WRに伝達することによってハイブリッド型車両を走行させることができる。
【0019】
なお、ハイブリッド型車両が前輪駆動方式の場合、前記車輪WL、WRは前輪にされ、後輪が従動輪となり、ハイブリッド型車両が後輪駆動方式の場合、前記車輪WL、WRは後輪にされ、前輪が従動輪となる。また、ハイブリッド型車両が四輪駆動方式の場合、前記駆動モータ11は前輪及び後輪の各車輪と接続される。本実施の形態においては、駆動モータ11と車輪WL、WRとが接続され、駆動モータ11を駆動することによって車輪WL、WRが回転させられるようになっているが、前輪及び後輪の各車輪に駆動モータを一体に組み込み、各駆動モータを独立に駆動してそれぞれ車輪を回転させることができる。
【0020】
また、13は駆動モータ11と接続され、駆動モータ11を駆動したり、回生したりするための駆動回路としてのインバータ、14は第1の電源としての、かつ、蓄電装置としてのバッテリ、15は第2の電源としての、第2の電動機械としての、かつ、発電装置としての発電機(G)である。前記バッテリ14及び発電機15から供給される電力によって駆動モータ11が駆動される。
【0021】
そして、16は前記バッテリ14と接続された接続要素としての差込プラグ、17は、前記発電機15と接続され、発電機15を駆動する駆動回路としてのインバータ、18は前記発電機15を駆動するための駆動源としてのエンジン(E/G)、19は該エンジン18に燃料(駆動媒体)としてのガソリンを供給する燃料供給源としての燃料タンクである。
【0022】
前記各インバータ13、17は、それぞれ、電圧変換部としての図示されないDC/DCコンバータ、及び複数の、例えば、6個のスイッチング素子としての図示されないトランジスタを備える。前記DC/DCコンバータは、駆動モータ11及び発電機15とバッテリ14との間で電圧を変更する。また、前記各トランジスタは、一対ずつユニット化されて各相のトランジスタモジュール(IGBT)を構成し、図示されない制御部から送られる駆動信号によってオン・オフさせられ、インバータ13において、バッテリ14から供給された直流の電流を3相の交流の電流に変換し、駆動モータ11に供給して駆動モータ11を駆動したり、駆動モータ11の回生に伴って発生させられた3相の交流の電流を直流の電流に変換し、バッテリ14に供給してバッテリ14を充電したり、インバータ17において、発電機15の発電に伴って発生させられた3相の交流の電流を直流の電流に変換し、バッテリ14に供給してバッテリ14を充電したりすることができる。そして、前記差込プラグ16を、家庭の商用電源のコンセント、充電スタンド(充電施設)の充電装置のコンセント等に差し込むことによって、バッテリ14を充電することができる。
【0023】
なお、本実施の形態において、DC/DCコンバータはインバータ13に内蔵されるようになっているが、インバータ13と独立させて配設することができる。
【0024】
本実施の形態においては、バッテリ14としてリチウムイオン電池が使用される。また、本実施の形態においては、蓄電装置としてバッテリ14が使用されるが、バッテリ14に代えてキャパシタを使用することができる。
【0025】
なお、本実施の形態においては、駆動モータ11に電流を供給することによってハイブリッド型車両を目的地まで走行させることができ、ハイブリッド型車両の平坦(たん)路、登坂路等における走行性能、及びハイブリッド型車両の加速時における加速性能を十分に高くすることができるように、バッテリ14は十分な電力を保持し、バッテリ14のエネルギー密度が0.1〔kWh/kg〕以上に、出力密度が1〔kW/kg〕以上にされる。
【0026】
また、バッテリ14の重量は、ハイブリッド型車両の動力性能を確保するために必要とされる最大出力及びバッテリ14の性能に基づいて、バッテリ14の許容範囲内で設定される。なお、最大出力は、車両重量、及び走行に伴ってハイブリッド型車両に加わる走行抵抗(空気抵抗、転がり抵抗、登坂抵抗、加速抵抗等)に基づいて算出される。
【0027】
例えば、車両重量が1000〔kg〕程度のハイブリッド型車両の場合、ハイブリッド型車両の最大出力は40〜60〔kW〕であり、バッテリ14の重量は40〜60〔kg〕にされる。従来の電気自動車において、走行可能距離を300〜500〔km〕とすると、電気自動車を走行させる際に距離当たり消費されるエネルギーは、約0.1〔kWh/km〕であるので、バッテリ14の重量は300〜500〔kg〕になる。これに対して、本実施の形態においては、発電機15によってバッテリ14を充電することにより走行に必要なエネルギーを補うことができるので、バッテリ14の重量を従来の電気自動車の1/8〜1/5にすることができる。
【0028】
本実施の形態においては、エンジン18として、ガソリンを燃料とする内燃式のエンジンが使用されるが、ガソリンに代えて水素等を燃料とする内燃式のエンジンを使用することができる。また、本実施の形態においては、発電機15を駆動するために内燃式のエンジンが使用されるが、エンジンとして、高圧の燃料タンクから供給される炭酸ガス、メタンガス等を燃料とする往復ピストン型の膨張式エンジンとしての、かつ、気化式エンジンとしての炭酸ガスエンジン、メタンガスエンジン等を使用することができる。
【0029】
さらに、発電装置として燃料電池を使用し、燃料電池として、固体高分子型燃料電池(PEFC)、リン酸型燃料電池(PAFC)、固体酸化物型燃料電池(SOFC)、ヒドラジン型燃料電池、直接メタノール型燃料電池(DMFC)等を使用することができる。
【0030】
ところで、バッテリ14の充電度合い(蓄電量)を表すために蓄電残量としてのバッテリ残量SOC〔%〕が使用される。該バッテリ残量SOC〔%〕は、それ以上バッテリ14が放電すると、過放電により、バッテリ14が急激に劣化するとされる残存最小容量がX0〔%〕とされ、それ以上バッテリ14が充電されると、過充電により、バッテリ14が急激に劣化するとされる残存最大容量がXmax〔%〕とされる。なお、バッテリ14の残存最小容量X0〔%〕及び残存最大容量Xmax〔%〕はバッテリ14の仕様によって決められる。
【0031】
この場合、例えば、バッテリ残量SOC〔%〕が残存最小容量X0〔%〕に到達するのに伴って発電機15による発電を開始すると、発電機15の出力をハイブリッド型車両に加わる走行負荷に対応させて調整する必要があるので、制御部における制御が複雑になるだけでなく、発電機15が大型化し、発電効率が低くなってしまう。
【0032】
そこで、本実施の形態においては、発電機15を発電効率が高い状態で駆動することができるように、ハイブリッド型車両の走行に伴って消費されるエネルギー、すなわち、消費エネルギーとバッテリ残量SOC〔%〕との差に基づいて、発電機15による発電が行われるようになっている。
【0033】
この場合、発電機15を発電効率が高い状態で駆動するために、発電機15は、発電効率の最大値又はその近傍の値を維持するように、一定の出力Pg〔N〕が設定され、エンジン18によって駆動される。なお、エンジンとして炭酸ガスエンジン、メタンガスエンジン等を使用する場合においても、発電機を発電効率が高い状態で駆動するために、発電機は、最大値又はその近傍の値を維持するように一定の出力が設定され、エンジンによって駆動される。
【0034】
また、発電装置として燃料電池を使用する場合は、電流と電圧との関係を表す特性曲線、すなわち、電流対電圧特性曲線上で燃料電池が通常の駆動状態で駆動され、電流が所定値以下にされるか、又は電圧が所定値以上にされる。例えば、燃料電池の単位電極で、電流が0.2〔A〕以下にされるか、又は電圧が0.8〔V〕以上にされる。
【0035】
そして、本実施の形態においては、前記発電機15を発電効率の高い状態で駆動する時間が発電時間とされる。
【0036】
次に、ハイブリッド型車両において発電機15による発電を行うための車両駆動装置について説明する。
【0037】
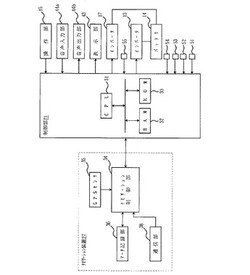
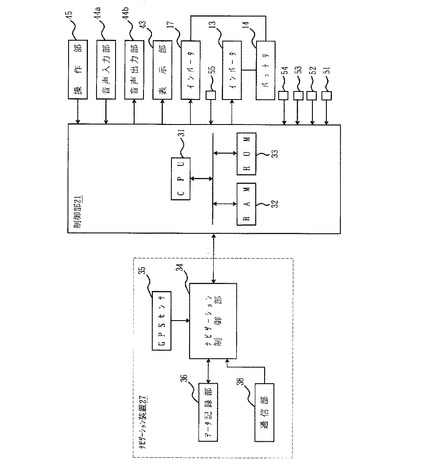
図1は本発明の第1の実施の形態における車両駆動装置を示す図である。
【0038】
図において、21はハイブリッド型車両の全体の制御を行う第1の制御ユニットとしての制御部、27はナビゲーション装置である。
【0039】
前記制御部21は、演算装置としてのCPU31、該CPU31が各種の演算処理を行うに当たってワーキングメモリとして使用されるRAM32、制御用のプログラムのほかに、各種のデータが記録されたROM33等を備える。
【0040】
また、前記ナビゲーション装置27は、ナビゲーション装置27の全体の制御を行う第2の制御ユニットとしてのナビゲーション制御部34を備え、該ナビゲーション制御部34は、制御部21と同様に、演算装置としてのCPU、RAM、ROM等を備える。
【0041】
そして、前記ナビゲーション制御部34に、ハイブリッド型車両の現在位置、ハイブリッド型車両の方位、時刻等を検出する現在地検出部としての、かつ、時刻検出部としてのGPSセンサ35、地図データのほかに各種の情報が記録された情報記録部としてのデータ記録部36、通信端末として機能する送受信部としての通信部38等が接続される。
【0042】
前記地図データには、交差点(分岐点を含む。)に関する交差点データ、各交差点間を結ぶ道路及び該道路を構成する道路リンクに関する道路状況を表す道路情報(道路データ)、各種の施設に関する施設データ、経路を探索するために加工された探索データ等が含まれる。
【0043】
また、前記通信部38は、第1の情報提供者としてのVICS(登録商標)センタ等の図示されない道路交通情報センタ等から送られる交通情報、一般情報等の各種の情報を受信する。なお、前記交通情報には、渋滞情報、規制情報、駐車場情報、交通事故情報、サービスエリアの混雑状況情報等が含まれ、一般情報には、ニュース、周囲環境状況を表す周囲環境情報(天気予報のほか、気温、湿度、天候等の実際の天気状況等)等が含まれる。また、前記通信部38は、第2の情報提供者としての情報センタから交通情報、一般情報等の各種の情報を受信することもできる。前記ナビゲーション装置27、道路交通情報センタ、情報センタ等によってナビゲーションシステムが構成される。
【0044】
そして、前記制御部21に、前記インバータ13、17のほかに、図示されない画面によって各種の表示を行い、操作者である運転者に対して通知を行うための第1の出力部としての表示部43、運転者が音声によって所定の入力を行うための音声入力部44a、音声を出力することによって運転者に対して通知を行うための第2の出力部としての音声出力部44b、運転者が操作することによって所定の入力を行うための操作部45、ハイブリッド型車両の車速v〔km/h〕を検出する車速検出部としての車速センサ51、バッテリ14の電圧、すなわち、バッテリ電圧Vb〔V〕を検出する電圧検出部としてバッテリ電圧センサ52、バッテリ14に供給され、又はバッテリ14から供給される電流、すなわち、バッテリ電流Ib〔A〕を検出する電流検出部としてのバッテリ電流センサ53、バッテリ14の温度、すなわち、バッテリ温度tb〔℃〕を検出する温度検出部としてのバッテリ温度センサ54、燃料タンク19からエンジン18に供給されるガソリンの残量、すなわち、燃料残量F〔L〕を検出する燃料残量検出部としての燃料残量センサ55等が接続される。なお、該燃料残量センサ55によって燃料の種類を検出することもできる。また、前記表示部43は、前記画面がタッチパネルによって形成される場合、運転者が操作することによって所定の入力を行うための操作部としても機能する。
【0045】
そして、制御部21、ナビゲーション制御部34、CPU31等によってコンピュータが構成され、データ記録部36、RAM32、ROM33等によって記憶装置又は記録媒体が構成される。また、演算装置として、CPU31に代えてMPU等を使用することができる。
【0046】
前記駆動モータ11、バッテリ14、発電機15、エンジン18、CPU31、GPSセンサ35等によってハイブリッド型車両が構成される。
【0047】
次に、前記ナビゲーション装置27の基本動作について説明する。
【0048】
まず、運転者による操作部45の操作によってナビゲーション装置27が起動されると、ナビゲーション制御部34のCPU(以下、「ナビCPU」という。)のナビ情報取得処理手段は、ナビ情報取得処理を行い、前記地図データを、データ記録部36から取得する(読み出す)か、又は通信部38を介して情報センタ等から取得(受信)する。
【0049】
次に、前記ナビCPUのマッチング処理手段は、マッチング処理を行い、GPSセンサ35から現在位置及び方位を読み込み、地図データから道路データを読み込み、現在位置、方位及び道路データに基づいて、現在位置がいずれの道路リンク上に位置するかを判断することによって、現在位置を特定する。そして、前記ナビCPUの表示処理手段は、表示処理を行い、前記表示部43に地図画面を形成し、該地図画面にハイブリッド型車両の現在位置、現在位置の周辺の地図及び方位を表示する。
【0050】
また、運転者が操作部45を操作して所定の地点を目的地として入力すると、前記ナビCPUの目的地設定処理手段は、目的地設定処理を行い、目的地を設定する。
【0051】
そして、運転者が操作部45を操作して、経路を探索するための条件、すなわち、探索条件を入力すると、前記ナビCPUの経路探索処理手段は、経路探索処理を行い、前記現在位置、目的地、探索条件等を読み込むとともに、地図データのうちの探索データを読み込み、現在位置、目的地及び探索データに基づいて、現在位置で表される出発地から目的地までの経路を前記探索条件で探索し、探索経路を表す経路データを出力する。なお、各道路リンクごとに付与されたリンクコストの合計が最も小さい経路が探索経路とされる。
【0052】
続いて、前記ナビCPUの案内処理手段は、案内処理を行い、前記経路データを読み込み、該経路データに従って前記地図画面に探索経路を表示し、必要に応じて、探索経路を音声で出力して経路案内を行う。
【0053】
次に、前記制御部21の動作について説明する。
【0054】
図3は本発明の第1の実施の形態における制御部の動作を示すメインフローチャート、図4は本発明の第1の実施の形態における距離当たり消費エネルギー算出処理のサブルーチンを示す図、図5は本発明の第1の実施の形態におけるHV走行可能時間算出処理のサブルーチンを示す図、図6は本発明の第1の実施の形態におけるEV走行可能時間算出処理のサブルーチンを示す図、図7は本発明の第1の実施の形態における走行パターン記録部の記録状態を示す第1の図、図8は本発明の第1の実施の形態における走行パターン記録部の記録状態を示す第2の図、図9は本発明の第1の実施の形態における探索経路の例を示す図、図10は本発明の第1の実施の形態における表示部に表示される走行可能範囲の例を示す第1の図、図11は本発明の第1の実施の形態における表示部に表示される走行可能範囲の例を示す第2の図、図12は本発明の第1の実施の形態における表示部に表示される走行可能範囲の例を示す第3の図、図13は本発明の第1の実施の形態における表示部に表示される走行可能範囲の例を示す第4の図、図14は本発明の第1の実施の形態における表示部に表示される走行可能範囲の例を示す第5の図である。
【0055】
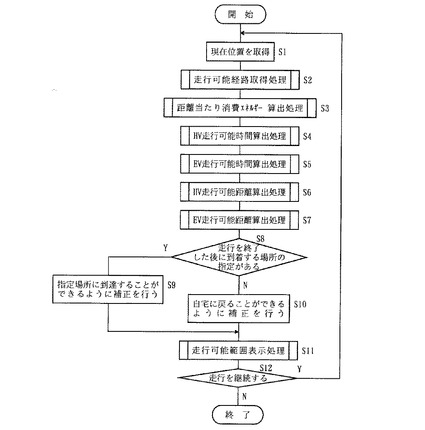
まず、CPU31の図示されない情報取得処理手段は、情報取得処理を行い、ナビゲーション装置27からナビゲーション情報として現在位置を取得する(読み込む)(ステップS1)。
【0056】
続いて、CPU31の図示されない走行可能経路取得処理手段は、走行可能経路取得処理を行い、ナビゲーション装置27に、現在位置からハイブリッド型車両を走行させることができる経路、すなわち、現在位置からの走行可能経路を探索するように指示を送り、ナビゲーション装置27から走行可能経路を取得する(ステップS2)。
【0057】
ナビゲーション装置27において、前記経路探索処理手段は、CPU31から前記指示を受けると、地図データの道路情報に基づいて、現在位置の周辺の所定の範囲内において、現在位置を出発地とし、ハイブリッド型車両を走行させることができる目的地のない道なりの経路を前記走行可能経路として探索し、制御部21に送信する。
【0058】
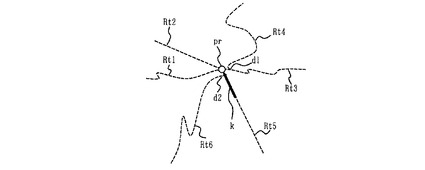
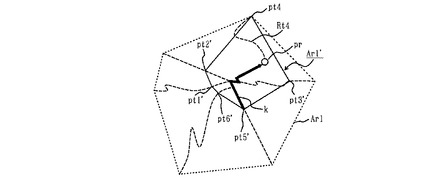
図9において、prは現在位置、kは走行軌跡、Rtj(j=1、2、…、n)は現在位置prと接続され、経路探索処理において探索された走行可能経路、d1は走行可能経路Rt3から走行可能経路Rt4が分岐する分岐点、d2は走行可能経路Rt5から走行可能経路Rt6が分岐する分岐点である。この場合、前記経路探索処理手段は、走行軌跡からみて、現在位置prより前方に存在する走行可能経路Rt1〜Rt4、現在位置prより後方に存在する走行可能経路Rt5、Rt6、走行可能経路Rt3、Rt5から分岐する走行可能経路Rt4、Rt6等を探索する。また、本実施の形態において、前記経路探索処理手段は、走行を開始する時点で、所定の道路種別の道路、例えば、国道、県道等の幹線道路については探索の対象とし、他の道路種別の道路、例えば、市道等の細街路については探索の対象としない。そして、前記経路探索処理手段は、ハイブリッド型車両が前記走行可能経路Rtiの終点の近くに至るのに伴って、市道等の細街路についても探索の対象とする。
【0059】
なお、本実施の形態において、経路探索処理手段は、現在位置prより後方に存在する走行可能経路Rt5、Rt6も探索するようになっているが、現在位置prより前方に存在する走行可能経路Rt1〜Rt4だけを探索するようにすることができる。
【0060】
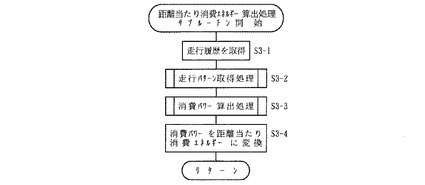
続いて、CPU31の図示されない距離当たり消費エネルギー算出処理手段は、距離当たり消費エネルギー算出処理を行い、各走行可能経路Rtjについて距離当たり消費エネルギーEuj(j=1、2、…、n)〔kWh/km〕を算出する(ステップS3)。
【0061】
そのために、距離当たり消費エネルギー算出処理手段の状況情報取得処理手段は、状況情報取得処理を行い、ハイブリッド型車両を走行させている間、制御タイミングごとの、ハイブリッド型車両の走行状況及び周囲環境状況を走行履歴として取得する(ステップS3−1)。
【0062】
本実施の形態において、前記走行状況は、ハイブリッド型車両が走行した距離を表す走行距離、ハイブリッド型車両が走行した時間を表す走行時間、運転者がハイブリッド型車両を加速させたり、減速させたりした状況を表す加減速状況等の走行状況指標である。前記加減速状況は、加速地点における加速度αm(m=1、2、…)及び減速地点における減速度βn(n=1、2、…)から成る。なお、前記走行距離は、制御部21に接続された図示されない距離計によって、走行時間は、制御部21に接続された図示されないタイマによって、加減速状況は、制御部21に接続された図示されないアクセルセンサ及びブレーキセンサによって検出され、制御部21に送られる。
【0063】
また、前記周囲環境状況は、ハイブリッド型車両を走行させる際の気温、天候、ハイブリッド型車両を走行させる際の時刻を表す走行時刻等の周囲環境指標である。なお、気温、天候、走行時刻等は、ナビゲーション装置27から読み込むことによって取得することができる。
【0064】
続いて、前記距離当たり消費エネルギー算出処理手段の走行パターン取得処理手段は、走行パターン取得処理を行い、前記走行履歴に基づいて、前記RAM32に形成された図示されない走行パターン記録部を参照し、あらかじめ設定され、走行パターン記録部に記録された走行パターンのうちの、前記走行履歴と類似する走行パターンを類似走行パターンとして取得する(ステップS3−2)。
【0065】
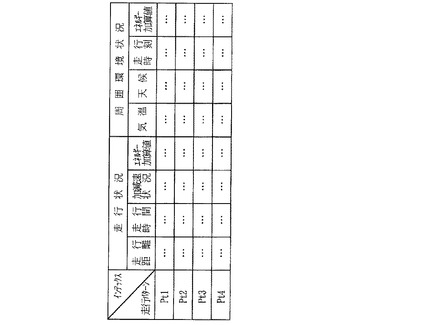
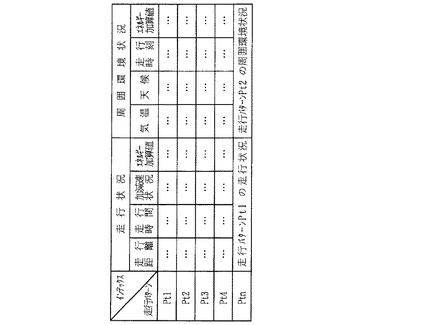
そのために、前記CPU31の図示されない走行パターン設定処理手段は、走行パターン設定処理を行い、ハイブリッド型車両の走行中に収集された情報、すなわち、収集情報にインデックスを付与して、図7に示されるような走行パターンPti(i=1、2、…)をあらかじめ設定し、前記走行パターン記録部に記録する。
【0066】
前記走行パターンPtiは、走行距離、走行時間、加減速状況、気温、天候、走行時刻等の、ハイブリッド型車両の走行態様を表す各情報から成り、各情報は、それぞれインデックスが付与され、走行距離、走行時間、加減速状況等が走行状況のインデックスに、気温、天候、走行時刻等が周囲環境状況のインデックスに分類されて前記走行パターン記録部に記録される。
【0067】
また、本実施の形態においては、同じ経路に沿ってハイブリッド型車両を走行させるたびに、距離当たり消費エネルギーEu〔kWh〕が算出され、前回ハイブリッド型車両を走行させたときに算出された距離当たり消費エネルギーと、今回ハイブリッド型車両を走行させたときに算出された距離当たり消費エネルギーとの差が、次回ハイブリッド型車両を走行パターンPtiで走行させるときに算出される距離当たり消費エネルギーEu〔kWh〕に加算するために、エネルギー加算値として走行状況及び周囲環境状況のインデックスごとに記録される。
【0068】
なお、前記走行パターン取得処理において、前記走行パターン記録部に類似走行パターンがない場合、前記走行パターン取得処理手段は、学習機能によって類似走行パターンを作成することにより取得する。
【0069】
そのために、前記走行パターン取得処理手段は、前記走行パターン記録部を参照し、走行パターンPtiのうちの走行状況及び周囲環境状況のインデックスごとに走行履歴と類似するパターン情報を備えた走行パターンを検索し、各インデックスごとのパターン情報を組み合わせることによって、新たな走行パターンを類似走行パターンPtnとして作成する。例えば、図8に示されるように、類似走行パターンPtnは、走行パターンPt1の走行状況及び走行パターンPt2の周囲環境状況の各走行パターン情報から成る。
【0070】
次に、前記距離当たり消費エネルギー算出処理手段の消費パワー算出処理手段は、消費パワー算出処理を行い、取得された類似走行パターンPtnに基づいて、ハイブリッド型車両を各走行可能経路Rtjに沿って走行させる際に必要な消費パワーPwj(j=1、2、…、n)〔kW〕を算出する(ステップS3−3)。
【0071】
ここで、類似走行パターンPtnから走行距離Lpj(j=1、2、…、n)〔km〕及び走行時間Tpj(j=1、2、…、n)〔h〕を読み出すことができるので、ハイブリッド型車両を各走行可能経路Rtjに沿って走行させる際の平均車速avj(j=1、2、…、n)〔km/h〕を、
avj=Lpj/Tpj
によって算出することができる。なお、本実施の形態においては、平均車速avj〔km/h〕を、走行距離Lpj〔km〕及び走行時間Tpj〔h〕に基づいて算出するようになっているが、あらかじめ走行距離Lp〔km〕及び走行時間Tp〔h〕に基づいて算出し、走行パターンPtiにおけるインデックスとして記録することができる。また、現在の走行状況に基づいて、RAM32に記録された過去のハイブリッド型車両の走行履歴を参照し、平均車速avj〔km/h〕を推定することができる。
【0072】
ところで、発電機15による発電を行いながらハイブリッド型車両を走行可能経路Rtjに沿ってHV走行で走行させる際にハイブリッド型車両が受ける走行抵抗をRj(j=1、2、…、n)〔N〕とすると、ハイブリッド型車両を走行可能経路Rtjに沿って走行させる際に走行抵抗Rj〔N〕によって消費されるパワー、すなわち、走行抵抗消費パワーPdj(j=1、2、…、n)〔kW〕は、
Pdj=Rj・avj
で表される。
【0073】
また、ハイブリッド型車両を走行可能経路Rtjに沿って走行させる際にエアコン、ライト、ナビゲーション装置27等の補機によって消費されるパワー(電力)、すなわち、補機消費パワーをPhj(j=1、2、…、n)〔kW〕とし、ハイブリッド型車両の制動に伴って駆動モータ11で回生されるパワー(電力)、すなわち、回生電力をPkj(j=1、2、…、n)〔kW〕とすると、ハイブリッド型車両を走行させる際に必要な前記消費パワーPwj〔kW〕は、
Pwj=Pdj+Phj−Pkj
=Rj・avj+Phj−Pkj
で表される。
【0074】
なお、前記走行抵抗Rj〔N〕は、類似走行パターンPtnに従ってハイブリッド型車両を走行させる際の空気抵抗をRa〔N〕とし、転がり抵抗をRr〔N〕とし、登坂抵抗をRs〔N〕とし、加速抵抗をRg〔N〕としたとき、
Rj=Ra+Rr+Rs+Rg
で表され、類似走行パターンPtnの情報に基づいて算出される。
【0075】
なお、前記空気抵抗Ra〔N〕は、ハイブリッド型車両を走行させる際に空気から受ける抵抗であり、空気密度をρとし、空気抵抗係数をCdとし、ハイブリッド型車両を前面から見たときの投影面積をAとしたとき、
Ra=(1/2)ρ・Cd・A・(av)2
で表すことができる。また、前記転がり抵抗Rr〔N〕は、ハイブリッド型車両を走行させる際にタイヤと路面との摩擦によって路面から受ける抵抗であり、タイヤと路面との摩擦係数をμrとし、ハイブリッド型車両の質量をmとし、重力加速度をgとしたとき、
Rr=μr・m・g
で表される。そして、前記登坂抵抗Rs〔N〕は、ハイブリッド型車両を登坂路を走行させる際に発生する抵抗であり、勾(こう)配をθkとしたとき、
Rs=m・g・Σsinθk
で表される。また、前記加速抵抗Rg〔N〕は、ハイブリッド型車両を加速させるのに伴って発生する抵抗であり、加速度をαmとしたとき、
Rg=m・g・Σαm
で表される。
【0076】
そして、前記補機消費パワーPhj〔kW〕は気温、天候、走行時刻等に基づいて、回生電力Pkj〔kW〕は減速度βn等に基づいて算出することができる。
【0077】
このようにして、ハイブリッド型車両を各走行可能経路Rtjに沿って走行させる際に必要な消費パワーPwj〔kW〕が算出されると、前記距離当たり消費エネルギー算出処理手段のパワー・エネルギー変換処理手段は、パワー・エネルギー変換処理を行い、消費パワーPwj〔kW〕を、ハイブリッド型車両を各走行可能経路Rtjに沿って走行させる際の距離当たり消費エネルギーEuj〔kWh/km〕
Euj=Pwj/avj
に変換する(ステップS3−4)。
【0078】
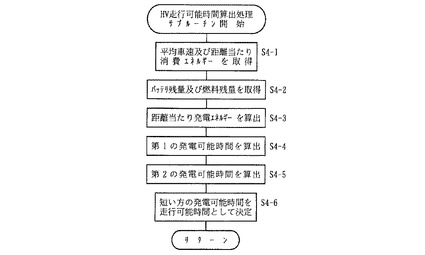
続いて、前記CPU31の図示されない第1の走行可能時間算出処理手段としてのHV走行可能時間算出処理手段は、第1の走行可能時間算出処理としてのHV走行可能時間算出処理を行い、発電機15による発電を行いながらハイブリッド型車両を走行可能経路Rtjに沿って走行させることができる(走行可能な)時間、すなわち、第1の走行可能時間としてのHV走行可能時間Tj(j=1、2、…、n)〔h〕を算出する(ステップS4)。
【0079】
そのために、HV走行可能時間算出処理手段の情報取得処理手段は、情報取得処理を行い、平均車速avj〔km/h〕及び距離当たり消費エネルギーEuj〔kWh/km〕を取得するとともに(ステップS4−1)、バッテリ残量SOC〔%〕及び燃料残量センサ55によって検出された燃料残量F〔L〕を取得する(ステップS4−2)。
【0080】
なお、バッテリ残量SOC〔%〕は、バッテリ電圧センサ52によって検出されたバッテリ電圧Vb〔V〕、バッテリ電流センサ53によって検出されたバッテリ電流Ib〔A〕、及びバッテリ温度センサ54によって検出されたバッテリ温度tb〔℃〕に基づいてあらかじめ算出される。この場合、バッテリ残量SOC〔%〕は、HV走行可能時間Tj〔h〕を制限する第1の制限要素となり、燃料残量F〔L〕は、HV走行可能時間Tj〔h〕を制限する第2の制限要素となる。
【0081】
続いて、前記HV走行可能時間算出処理手段の発電エネルギー算出処理手段は、発電エネルギー算出処理を行い、発電機15の出力Pg〔N〕及び平均車速avj〔km/h〕を取得し、発電機15の出力Pg〔N〕及び平均車速avj〔km/h〕に基づいて距離当たり発電エネルギーGuj〔kWh/km〕
Guj=Pg/avj
を算出する(ステップS4−3)。
【0082】
次に、HV走行可能時間算出処理手段の発電可能時間算出処理手段は、発電可能時間算出処理を行い、エンジン18を駆動したときのガソリンの単位量当たりの発熱量(熱エネルギー)をHf〔kWh/L〕とし、発電機15の発電効率をηとし、発電機15を一定の出力Pg〔N〕で駆動して発電を行った場合に、燃料残量F〔L〕が0(零)になるまでの、燃料残量F〔L〕によって制限される第1の発電可能時間Tfj(j=1、2、…、n)〔h〕
Tfj=F・Hf・η/Pg
を算出する(ステップS4−4)。
【0083】
続いて、前記発電可能時間算出処理手段は、発電機15を一定の出力Pg〔N〕で駆動し、ハイブリッド型車両を平均車速avj〔km/h〕で走行させて発電を行った場合に、残存エネルギーB〔kWh〕が0(零)になるまでの、バッテリ残量SOC〔%〕によって制限される第2の発電可能時間Tbj(j=1、2、…、n)〔h〕
Tbj=(B/(Euj−Guj))/avj
を算出する(ステップS4−5)。
【0084】
なお、前記残存エネルギーB〔kWh〕は、バッテリ14に残存するエネルギーを表し、前記バッテリ残量SOC〔%〕、バッテリ14の仕様によって決まる総バッテリ容量Qb、残存最小容量X0〔%〕、残存最大容量Xmax〔%〕及びバッテリ14の劣化に伴う補正係数γに基づいて、
B=γ・((SOC−X0)/(Xmax−X0))・Qb
で表される。
【0085】
そして、HV走行可能時間算出処理手段のHV走行可能時間決定処理手段は、HV走行可能時間決定処理を行い、前記第1、第2の発電可能時間Tfj、Tbj〔h〕のうちの短い方の発電可能時間をHV走行可能時間Tj〔h〕として決定する(ステップS4−6)。
【0086】
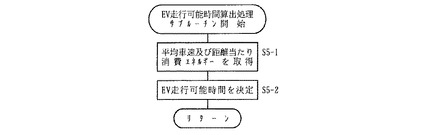
続いて、前記CPU31の図示されない第2の走行可能時間算出処理手段としてのEV走行可能時間算出処理手段は、第2の走行可能時間算出処理としてのEV走行可能時間算出処理を行い、発電機15による発電を行うことなくハイブリッド型車両を走行可能経路Rtjに沿ってEV走行で走行させることができる時間、すなわち、第2の走行可能時間としてのEV走行可能時間Tej(j=1、2、…、n)〔h〕を算出する(ステップS5)。
【0087】
そのために、前記EV走行可能時間算出処理手段の情報取得処理手段は、情報取得処理を行い、平均車速avj〔km/h〕及び距離当たり消費エネルギーEuj〔kWh/km〕を取得し(ステップS5−1)、前記EV走行可能時間算出処理手段のEV走行可能時間決定処理手段は、EV走行可能時間決定処理を行い、バッテリ残量SOC〔%〕を取得し、EV走行可能時間Tej〔h〕
Tej=(SOC/Euj)/avj
を決定する(ステップS5−2)。
【0088】
次に、CPU31の図示されない第1の走行可能距離算出処理手段としてのHV走行可能距離算出処理手段は、第1の走行可能距離算出処理としてのHV走行可能距離算出処理を行い、HV走行可能時間Tj〔h〕を取得し、前記ハイブリッド型車両を走行可能経路Rtjに沿って前記HV走行可能時間Tj〔h〕の間HV走行で走行させることができる(走行可能な)距離、すなわち、第1の走行可能距離としてのHV走行可能距離Lj(j=1、2、…、n)〔km〕
Lj=Tej・avj
を算出する(ステップS6)。
【0089】
また、CPU31の図示されない第2の走行可能距離算出処理手段としてのEV走行可能距離算出処理手段は、第2の走行可能距離算出処理としてのEV走行可能距離算出処理を行い、EV走行可能時間Tej〔h〕を取得し、前記ハイブリッド型車両を走行可能経路Rtjに沿って前記EV走行可能時間Tej〔h〕の間EV走行で走行させることができる距離、すなわち、第2の走行可能距離としてのEV走行可能距離Lej(j=1、2、…、n)〔km〕
Lej=Tej・avj
を算出する(ステップS7)。
【0090】
続いて、前記CPU31の図示されない到着場所指定判断処理手段は、到着場所指定判断処理を行い、ハイブリッド型車両が走行を終了した後に到着する場所の指定があるかどうかを判断する(ステップS8)。すなわち、到着場所指定判断処理手段は、ハイブリッド型車両をHV走行可能時間Tj〔h〕又はEV走行可能時間Tej〔h〕走行させた後に、運転者が指定した場所、すなわち、指定場所、例えば、近隣の宿泊施設、充電スタンド等までハイブリッド型車両を更に走行させる必要があるかどうかを判断する。
【0091】
そのために、到着場所指定判断処理手段は、表示部43において、運転者に到着する場所の指定をするように通知する。
【0092】
到着する場所の指定がある場合、CPU31の図示されない走行可能距離補正処理手段は、走行可能距離補正処理を行い、指定場所に到着することができるように、HV走行可能距離Lj〔km〕及びEV走行可能距離Lej〔km〕の補正を行う(ステップS9)。
【0093】
例えば、現在位置prからハイブリッド型車両をHV走行可能距離Lj〔km〕又はEV走行可能距離Lej〔km〕走行させた後に、運転者によって到着場所が指定され、ハイブリッド型車両を更に走行させる必要がある場合、走行可能経路Rtj上の現在位置prからHV走行可能距離Lj〔km〕又はEV走行可能距離Lej〔km〕離れた地点を走行可能地点とすると、走行可能地点から更にハイブリッド型車両を指定場所まで走行させる必要がある。
【0094】
そこで、前記走行可能距離補正処理手段は、HV走行可能距離Lj〔km〕及びEV走行可能距離Lej〔km〕に、指定場所の位置に対応させて、所定の補正係数を乗算させるか、所定の距離を加算することによってHV走行可能距離Lj〔km〕及びEV走行可能距離Lej〔km〕の補正を行う。
【0095】
また、到着する場所の指定がない場合、前記走行可能距離補正処理手段は、自宅に戻ることができるように、HV走行可能距離Lj〔km〕及びEV走行可能距離Lej〔km〕の補正を行う(ステップS10)。
【0096】
この場合、前記走行可能距離補正処理手段は、HV走行可能距離Lj〔km〕及びEV走行可能距離Lej〔km〕に、自宅の位置に対応させて、所定の補正係数を乗算させるか、所定の距離を加算することによってHV走行可能距離Lj〔km〕及びEV走行可能距離Lej〔km〕の補正を行う。
【0097】
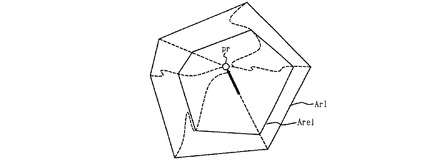
このようにして、HV走行可能距離Lj〔km〕及びEV走行可能距離Lej〔km〕の補正が行われると、CPU31の図示されない走行可能範囲表示処理手段は、走行可能範囲表示処理を行い、表示部43に走行可能範囲表示画面を形成し、該走行可能範囲表示画面に、現在位置pr、並びに補正が行われた後のHV走行可能距離Lj〔km〕及びEV走行可能距離Lej〔km〕によって設定される第1の走行可能範囲としてのHV走行可能範囲及び第2の走行可能範囲としてのEV走行可能範囲を表示する(ステップS11)。なお、HV走行可能距離Lj〔km〕は、発電機15による発電を行いながらハイブリッド型車両を走行可能経路Rtjに沿って走行させることができる範囲であり、EV走行可能距離Lej〔km〕は、発電機15による発電を行うことなくハイブリッド型車両を走行可能経路Rtjに沿って走行させることができる範囲である。
【0098】
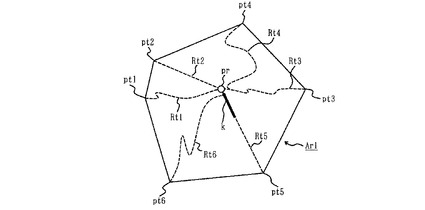
そのために、前記走行可能範囲表示処理手段は、図10に示されるように、各走行可能経路Rtj上の現在位置prからHV走行可能距離Lj〔km〕離れた地点ptj(j=1、2、…、n)間を所定の形状の線、本実施の形態においては、直線で結び、直線によって包囲される範囲をHV走行可能範囲Ar1とし、該HV走行可能範囲Ar1を前記走行可能範囲表示画面に表示する。
【0099】
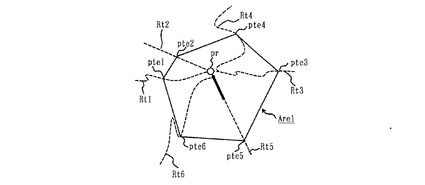
また、前記走行可能範囲表示処理手段は、図11に示されるように、各走行可能経路Rtj上の現在位置prからEV走行可能距離Lej〔km〕離れた地点ptej(j=1、2、…、n)間を所定の形状の線、本実施の形態においては、直線で結び、直線によって包囲される範囲をEV走行可能範囲Are1とし、該EV走行可能範囲Are1を前記走行可能範囲表示画面に表示する。
【0100】
なお、前記走行可能範囲表示処理手段は、図12に示されるように、HV走行可能範囲Ar1及びEV走行可能範囲Are1を前記走行可能範囲表示画面に重ねて表示することができる。
【0101】
そして、CPU31の図示されない走行継続判断処理手段は、走行継続判断処理を行い、ハイブリッド型車両の走行を継続するかどうかを判断する(ステップS12)。ハイブリッド型車両の走行を継続する場合、前記情報取得処理手段は再び現在位置を取得し、ハイブリッド型車両の走行を継続する場合、処理を終了する。
【0102】
ところで、発電機15による発電を行いながらハイブリッド型車両を走行可能経路Rtjに沿って走行させると、現在位置prが変化し、バッテリ残量SOC〔%〕及び燃料残量F〔L〕が少なくなるので、HV走行可能距離Lj〔km〕は短くなり、図13に示されるように、走行可能範囲Ar1は小さくなり、Ar1’になる。
【0103】
例えば、ハイブリッド型車両を走行可能経路Rt4に沿って走行させると、現在位置prは走行可能経路Rt4上を移動する。そして、走行可能範囲Ar1がAr1’になるのに伴って、地点pt4は移動しないのに対して、地点pt1〜pt3、pt5、pt6はそれぞれ走行可能経路Rt1〜Rt3、Rt5、Rt6上を移動し、pt1’〜pt3’、pt5’、pt6’になる。
【0104】
また、発電機15による発電を行うことなく、ハイブリッド型車両を走行可能経路Rtjに沿って走行させると、現在位置prが変化し、バッテリ残量SOC〔%〕が少なくなるので、EV走行可能距離Lej〔km〕は短くなり、EV走行可能範囲Are1は小さくなる。
【0105】
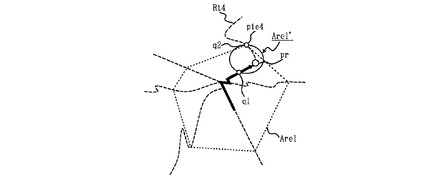
なお、ハイブリッド型車両を走行可能経路Rtjに沿って走行させる間に現在位置prが変化し、HV走行可能範囲Ar1及びEV走行可能範囲Are1が所定以上小さくなると、地点pt1〜pt6、pte1〜pte6を結ぶことができなくなる。
【0106】
そこで、HV走行可能範囲Ar1及びEV走行可能範囲Are1が所定以上小さくなると、ナビCPUの前記経路探索処理手段は、幹線道路だけでなく、細街路も探索対象として走行可能経路を探索し、前記走行可能範囲表示処理手段は、細街路を含む走行可能経路上の地点間を結んでHV走行可能範囲Ar1及びEV走行可能範囲Are1を表示する。
【0107】
なお、細街路を探索対象にすることができない場合、前記走行可能範囲表示処理手段は、例えば、図14に示されるように、走行可能経路Rt4の複数の点、例えば、q1、q2を設定し、点q1、q2を含む所定の形状、例えば、楕(だ)円形の形状を有する領域を走行可能範囲Are1’とする。
【0108】
このように、本実施の形態においては、距離当たり消費エネルギーEuj〔kWh/km〕、距離当たり発電エネルギーGuj〔kWh/km〕、前記バッテリ14のバッテリ残量SOC〔%〕及び前記エンジン18の燃料残量F〔L〕に基づいて、ハイブリッド型車両を走行させることができるHV走行可能時間Tj〔h〕及びEV走行可能時間Tej〔h〕が算出され、HV走行可能時間Tj〔h〕及びEV走行可能時間Tej〔h〕並びに平均車速avj〔km/h〕に基づいてHV走行可能距離Lj〔km〕及びEV走行可能距離Lej〔km〕が算出され、前記HV走行可能距離Lj〔km〕及びEV走行可能距離Lej〔km〕に基づいて、ハイブリッド型車両を走行させることができるHV走行可能範囲Ar1及びEV走行可能範囲Aer1が算出され、表示部43に表示されるので、目的地を設定することなくハイブリッド型車両を走行させる場合に、運転者は、どこまで走行させることができるかを容易に知ることができ、安心してハイブリッド型車両を走行させることができる。
【0109】
次に、走行パターンPtiを使用することなく、ナビゲーション情報に基づいて、距離当たり消費エネルギーEuj〔kWh/km〕を算出することができるようにした本発明の第2の実施の形態について説明する。なお、第1の実施の形態と同じ構造を有するものについては、同じ符号を付与し、同じ構造を有することによる発明の効果については同実施の形態の効果を援用する。
【0110】
図15は本発明の第2の実施の形態における距離当たり消費エネルギー算出処理のサブルーチンを示す図である。
【0111】
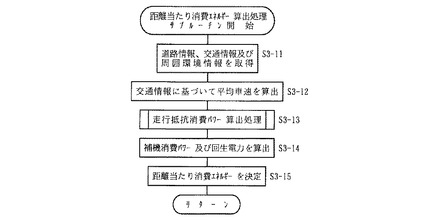
まず、前記距離当たり消費エネルギー算出処理手段の情報取得処理手段は、情報取得処理を行い、ナビゲーション装置27(図1)から、情報記録部としてのデータ記録部36に記録された道路情報(勾配、路面情報等)、並びに送受信部としての通信部38によって取得された交通情報(渋滞情報、車の流れ、車速等)及び周囲環境情報(気温、天候等)を取得する(ステップS3−11)。なお、前記走行可能経路Rtjのうちの所定の走行可能経路が利用頻度の高い道路である場合は、前記道路情報、交通情報等をRAM32にあらかじめ記録しておくことができる。
【0112】
次に、距離当たり消費エネルギー算出処理手段の平均車速算出処理手段は、平均車速算出処理を行い、渋滞情報、車の流れ、車速等の交通情報に基づいて、ハイブリッド型車両を走行可能経路Rtjに沿って走行させる際の平均車速avj〔km/h〕を算出する(ステップS3−12)。
【0113】
続いて、距離当たり消費エネルギー算出処理手段の走行抵抗消費パワー算出処理手段は、走行抵抗消費パワー算出処理を行い、ナビゲーション情報に基づいて、走行抵抗R〔N〕を算出し、ハイブリッド型車両を走行可能経路Rtjに沿って走行させる際に走行抵抗R〔N〕によって消費される走行抵抗消費パワーPdj〔kW〕
Pdj=R・avj
を算出する(ステップS3−13)。
【0114】
なお、前記走行抵抗R〔N〕は、ハイブリッド型車両を走行可能経路Rtjに沿って走行させる際の空気抵抗をRa〔N〕とし、転がり抵抗をRr〔N〕とし、登坂抵抗をRs〔N〕とし、加速抵抗をRg〔N〕としたとき、
R=Ra+Rr+Rs+Rg
で表される。
【0115】
次に、距離当たり消費エネルギー算出処理手段の補機消費パワー算出処理手段は、補機消費パワー算出処理を行い、気温、天候等の周囲環境情報に基づいて、ハイブリッド型車両を走行可能経路Rtjに沿って走行させる際に補機によって消費される補機消費パワーPhj〔kW〕を算出し、距離当たり消費エネルギー算出処理手段の回生消費パワー算出処理手段は、回生消費パワー算出処理を行い、勾配等の道路情報、渋滞情報、車の流れ、車速等の交通情報等に基づいて、ハイブリッド型車両を走行可能経路Rtjに沿って走行させる際に制動に伴って駆動モータ11で回生される回生電力Pkj〔kW〕を算出する(ステップS3−14)。
【0116】
続いて、距離当たり消費エネルギー算出処理手段の距離当たり消費エネルギー決定処理手段は、距離当たり消費エネルギー決定処理を行い、ハイブリッド型車両を走行可能経路Rtjに沿って走行させる際に必要な消費パワーPwj〔kW〕
Pwj=Pdj+Phj−Pkj
=R・avj+Phj−Pkj
を算出し、該消費パワーPwj〔kW〕及び平均車速avj〔km/h〕を取得し、消費パワーPwj〔kW〕及び平均車速avj〔km/h〕に基づいて距離当たり消費エネルギーEuj〔kWh/km〕
Euj=Pwj/avj
を決定する(ステップS3−15)。
【0117】
なお、本発明は前記各実施の形態に限定されるものではなく、本発明の趣旨に基づいて種々変形させることが可能であり、それらを本発明の範囲から排除するものではない。
【符号の説明】
【0118】
11 駆動モータ
14 バッテリ
15 発電機
18 エンジン
31 CPU
35 GPSセンサ
43 表示部
Ar1 HV走行可能範囲
Are1 EV走行可能範囲
avj 平均車速
Euj 距離当たり消費エネルギー
F 燃料残量
Lj HV走行可能距離
Lej EV走行可能距離
pr 現在位置
Pwj 消費パワー
Rtj 走行可能経路
Tj HV走行可能時間
Tej EV走行可能時間
【技術分野】
【0001】
本発明は、電動駆動車両に関するものである。
【背景技術】
【0002】
従来、電気自動車等の電動駆動車両、例えば、電気自動車は、車両駆動装置を備え、該車両駆動装置において、駆動モータをバッテリから供給される電力によって駆動し、駆動モータのトルク、すなわち、駆動モータトルクを発生させ、該駆動モータトルクを駆動輪に伝達することによって走行させられるようになっている。
【0003】
ところが、前記バッテリにおいては、単位重量当たりの容量を表すエネルギー密度を十分に高くすることができないので、バッテリから供給される電力を利用して電気自動車を走行させた場合、走行可能な距離を表す走行可能距離、走行可能な時間を表す走行可能時間等を長くすることができない。走行可能距離、走行可能時間等を長くするためにはバッテリの容量を大きくする必要があるが、その場合、バッテリが大型化するだけでなく、バッテリの重量が大きくなる。その結果、電気自動車が大型化し、電気自動車の重量が大きくなってしまう。
【0004】
そこで、走行可能距離、走行可能時間等を長くすることができるように、バッテリのほかに発電機を配設し、エンジンによって発電機を駆動して電流を発生させ、バッテリに供給するようにした電動駆動車両として、ハイブリッド型車両が提供されている。
【0005】
そして、該ハイブリッド型車両においては、バッテリの充電度合い(蓄電量)を表すバッテリ残量、エンジンを駆動するための燃料の残量、すなわち、燃料残量、及びハイブリッド型車両の過去の走行状況に基づいて走行可能距離が算出され、表示部に形成された画面に表示されるようになっている(例えば、特許文献1参照。)。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2001−231103号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
しかしながら、前記従来のハイブリッド型車両においては、発電機の出力をハイブリッド型車両に加わる走行負荷に対応させて調整する必要があるので、制御部における制御が複雑になるとともに、発電効率が低くなってしまう。
【0008】
そこで、発電機を発電効率が高い一定の出力で駆動するようにしたハイブリッド型車両が考えられるが、その場合、発電機を一定の出力で駆動するのに必要な時間、すなわち、必要発電時間がバッテリ残量によって異なるので、バッテリ残量及び発電による発電エネルギーに基づいて、走行可能距離を正確に算出することができない。
【0009】
したがって、目的地を設定することなくハイブリッド型車両を走行させる場合に、運転者は、どこまで走行させることができるかを知ることができず、安心してハイブリッド型車両を走行させることができない。
【0010】
本発明は、前記従来のハイブリッド型車両の問題点を解決して、運転者が、どこまで走行させることができるかを知ることができ、安心して走行させることができる電動駆動車両を提供することを目的とする。
【課題を解決するための手段】
【0011】
そのために、本発明の電動駆動車両においては、蓄電装置と、発電装置と、該発電装置を駆動するエンジンと、前記蓄電装置及び発電装置と接続され、蓄電装置及び発電装置から供給される電力によって駆動される駆動モータと、現在位置を検出する現在地検出部と、道路情報に基づいて、現在位置を出発地とし、電動駆動車両を走行させることができる道なりの経路を走行可能経路として探索する経路探索処理手段と、電動駆動車両を前記走行可能経路に沿って走行させる際に必要な消費パワーを算出し、該消費パワー及び平均車速に基づいて距離当たり消費エネルギーを算出する距離当たり消費エネルギー算出処理手段と、前記距離当たり消費エネルギーに基づいて、電動駆動車両を走行可能経路に沿って走行させることができる走行可能時間を算出する走行可能時間算出処理手段と、前記走行可能時間及び平均車速に基づいて走行可能距離を算出する走行可能距離算出処理手段と、前記走行可能距離に基づいて、電動駆動車両を走行可能経路に沿って走行させることができる走行可能範囲を算出する走行可能範囲算出処理手段と、前記走行可能範囲を表示部に表示する走行可能範囲表示処理手段とを有する。
【発明の効果】
【0012】
本発明によれば、電動駆動車両においては、蓄電装置と、発電装置と、該発電装置を駆動するエンジンと、前記蓄電装置及び発電装置と接続され、蓄電装置及び発電装置から供給される電力によって駆動される駆動モータと、現在位置を検出する現在地検出部と、道路情報に基づいて、現在位置を出発地とし、電動駆動車両を走行させることができる道なりの経路を走行可能経路として探索する経路探索処理手段と、電動駆動車両を前記走行可能経路に沿って走行させる際に必要な消費パワーを算出し、該消費パワー及び平均車速に基づいて距離当たり消費エネルギーを算出する距離当たり消費エネルギー算出処理手段と、前記距離当たり消費エネルギーに基づいて、電動駆動車両を走行可能経路に沿って走行させることができる走行可能時間を算出する走行可能時間算出処理手段と、前記走行可能時間及び平均車速に基づいて走行可能距離を算出する走行可能距離算出処理手段と、前記走行可能距離に基づいて、電動駆動車両を走行可能経路に沿って走行させることができる走行可能範囲を算出する走行可能範囲算出処理手段と、前記走行可能範囲を表示部に表示する走行可能範囲表示処理手段とを有する。
【0013】
この場合、距離当たり消費エネルギーに基づいて走行可能時間が算出され、該走行可能時間及び平均車速に基づいて走行可能距離が算出され、該走行可能距離に基づいて電動駆動車両を走行させることができる走行可能範囲が算出され、表示部に表示される。
【0014】
したがって、目的地を設定することなく電動駆動車両を走行させる場合に、運転者は、どこまで走行させることができるかを容易に知ることができ、安心して電動駆動車両を走行させることができる。
【図面の簡単な説明】
【0015】
【図1】本発明の第1の実施の形態における車両駆動装置を示す図である。
【図2】本発明の第1の実施の形態におけるハイブリッド型車両の概念図である。
【図3】本発明の第1の実施の形態における制御部の動作を示すメインフローチャートである。
【図4】本発明の第1の実施の形態における距離当たり消費エネルギー算出処理のサブルーチンを示す図である。
【図5】本発明の第1の実施の形態におけるHV走行可能時間算出処理のサブルーチンを示す図である。
【図6】本発明の第1の実施の形態におけるEV走行可能時間算出処理のサブルーチンを示す図である。
【図7】本発明の第1の実施の形態における走行パターン記録部の記録状態を示す第1の図である。
【図8】本発明の第1の実施の形態における走行パターン記録部の記録状態を示す第2の図である。
【図9】本発明の第1の実施の形態における探索経路の例を示す図である。
【図10】本発明の第1の実施の形態における表示部に表示される走行可能範囲の例を示す第1の図である。
【図11】本発明の第1の実施の形態における表示部に表示される走行可能範囲の例を示す第2の図である。
【図12】本発明の第1の実施の形態における表示部に表示される走行可能範囲の例を示す第3の図である。
【図13】本発明の第1の実施の形態における表示部に表示される走行可能範囲の例を示す第4の図である。
【図14】本発明の第1の実施の形態における表示部に表示される走行可能範囲の例を示す第5の図である。
【図15】本発明の第2の実施の形態における距離当たり消費エネルギー算出処理のサブルーチンを示す図である。
【発明を実施するための形態】
【0016】
以下、本発明の実施の形態について図面を参照しながら詳細に説明する。この場合、電動駆動車両としてのハイブリッド型車両について説明する。
【0017】
図2は本発明の第1の実施の形態におけるハイブリッド型車両の概念図である。
【0018】
図において、WL、WRは駆動輪として機能する車輪、11は該車輪WL、WRと接続された駆動源としての、かつ、第1の電動機械としての駆動モータ(M)である。該駆動モータ11を駆動することによって発生させられた駆動モータトルクを前記車輪WL、WRに伝達することによってハイブリッド型車両を走行させることができる。
【0019】
なお、ハイブリッド型車両が前輪駆動方式の場合、前記車輪WL、WRは前輪にされ、後輪が従動輪となり、ハイブリッド型車両が後輪駆動方式の場合、前記車輪WL、WRは後輪にされ、前輪が従動輪となる。また、ハイブリッド型車両が四輪駆動方式の場合、前記駆動モータ11は前輪及び後輪の各車輪と接続される。本実施の形態においては、駆動モータ11と車輪WL、WRとが接続され、駆動モータ11を駆動することによって車輪WL、WRが回転させられるようになっているが、前輪及び後輪の各車輪に駆動モータを一体に組み込み、各駆動モータを独立に駆動してそれぞれ車輪を回転させることができる。
【0020】
また、13は駆動モータ11と接続され、駆動モータ11を駆動したり、回生したりするための駆動回路としてのインバータ、14は第1の電源としての、かつ、蓄電装置としてのバッテリ、15は第2の電源としての、第2の電動機械としての、かつ、発電装置としての発電機(G)である。前記バッテリ14及び発電機15から供給される電力によって駆動モータ11が駆動される。
【0021】
そして、16は前記バッテリ14と接続された接続要素としての差込プラグ、17は、前記発電機15と接続され、発電機15を駆動する駆動回路としてのインバータ、18は前記発電機15を駆動するための駆動源としてのエンジン(E/G)、19は該エンジン18に燃料(駆動媒体)としてのガソリンを供給する燃料供給源としての燃料タンクである。
【0022】
前記各インバータ13、17は、それぞれ、電圧変換部としての図示されないDC/DCコンバータ、及び複数の、例えば、6個のスイッチング素子としての図示されないトランジスタを備える。前記DC/DCコンバータは、駆動モータ11及び発電機15とバッテリ14との間で電圧を変更する。また、前記各トランジスタは、一対ずつユニット化されて各相のトランジスタモジュール(IGBT)を構成し、図示されない制御部から送られる駆動信号によってオン・オフさせられ、インバータ13において、バッテリ14から供給された直流の電流を3相の交流の電流に変換し、駆動モータ11に供給して駆動モータ11を駆動したり、駆動モータ11の回生に伴って発生させられた3相の交流の電流を直流の電流に変換し、バッテリ14に供給してバッテリ14を充電したり、インバータ17において、発電機15の発電に伴って発生させられた3相の交流の電流を直流の電流に変換し、バッテリ14に供給してバッテリ14を充電したりすることができる。そして、前記差込プラグ16を、家庭の商用電源のコンセント、充電スタンド(充電施設)の充電装置のコンセント等に差し込むことによって、バッテリ14を充電することができる。
【0023】
なお、本実施の形態において、DC/DCコンバータはインバータ13に内蔵されるようになっているが、インバータ13と独立させて配設することができる。
【0024】
本実施の形態においては、バッテリ14としてリチウムイオン電池が使用される。また、本実施の形態においては、蓄電装置としてバッテリ14が使用されるが、バッテリ14に代えてキャパシタを使用することができる。
【0025】
なお、本実施の形態においては、駆動モータ11に電流を供給することによってハイブリッド型車両を目的地まで走行させることができ、ハイブリッド型車両の平坦(たん)路、登坂路等における走行性能、及びハイブリッド型車両の加速時における加速性能を十分に高くすることができるように、バッテリ14は十分な電力を保持し、バッテリ14のエネルギー密度が0.1〔kWh/kg〕以上に、出力密度が1〔kW/kg〕以上にされる。
【0026】
また、バッテリ14の重量は、ハイブリッド型車両の動力性能を確保するために必要とされる最大出力及びバッテリ14の性能に基づいて、バッテリ14の許容範囲内で設定される。なお、最大出力は、車両重量、及び走行に伴ってハイブリッド型車両に加わる走行抵抗(空気抵抗、転がり抵抗、登坂抵抗、加速抵抗等)に基づいて算出される。
【0027】
例えば、車両重量が1000〔kg〕程度のハイブリッド型車両の場合、ハイブリッド型車両の最大出力は40〜60〔kW〕であり、バッテリ14の重量は40〜60〔kg〕にされる。従来の電気自動車において、走行可能距離を300〜500〔km〕とすると、電気自動車を走行させる際に距離当たり消費されるエネルギーは、約0.1〔kWh/km〕であるので、バッテリ14の重量は300〜500〔kg〕になる。これに対して、本実施の形態においては、発電機15によってバッテリ14を充電することにより走行に必要なエネルギーを補うことができるので、バッテリ14の重量を従来の電気自動車の1/8〜1/5にすることができる。
【0028】
本実施の形態においては、エンジン18として、ガソリンを燃料とする内燃式のエンジンが使用されるが、ガソリンに代えて水素等を燃料とする内燃式のエンジンを使用することができる。また、本実施の形態においては、発電機15を駆動するために内燃式のエンジンが使用されるが、エンジンとして、高圧の燃料タンクから供給される炭酸ガス、メタンガス等を燃料とする往復ピストン型の膨張式エンジンとしての、かつ、気化式エンジンとしての炭酸ガスエンジン、メタンガスエンジン等を使用することができる。
【0029】
さらに、発電装置として燃料電池を使用し、燃料電池として、固体高分子型燃料電池(PEFC)、リン酸型燃料電池(PAFC)、固体酸化物型燃料電池(SOFC)、ヒドラジン型燃料電池、直接メタノール型燃料電池(DMFC)等を使用することができる。
【0030】
ところで、バッテリ14の充電度合い(蓄電量)を表すために蓄電残量としてのバッテリ残量SOC〔%〕が使用される。該バッテリ残量SOC〔%〕は、それ以上バッテリ14が放電すると、過放電により、バッテリ14が急激に劣化するとされる残存最小容量がX0〔%〕とされ、それ以上バッテリ14が充電されると、過充電により、バッテリ14が急激に劣化するとされる残存最大容量がXmax〔%〕とされる。なお、バッテリ14の残存最小容量X0〔%〕及び残存最大容量Xmax〔%〕はバッテリ14の仕様によって決められる。
【0031】
この場合、例えば、バッテリ残量SOC〔%〕が残存最小容量X0〔%〕に到達するのに伴って発電機15による発電を開始すると、発電機15の出力をハイブリッド型車両に加わる走行負荷に対応させて調整する必要があるので、制御部における制御が複雑になるだけでなく、発電機15が大型化し、発電効率が低くなってしまう。
【0032】
そこで、本実施の形態においては、発電機15を発電効率が高い状態で駆動することができるように、ハイブリッド型車両の走行に伴って消費されるエネルギー、すなわち、消費エネルギーとバッテリ残量SOC〔%〕との差に基づいて、発電機15による発電が行われるようになっている。
【0033】
この場合、発電機15を発電効率が高い状態で駆動するために、発電機15は、発電効率の最大値又はその近傍の値を維持するように、一定の出力Pg〔N〕が設定され、エンジン18によって駆動される。なお、エンジンとして炭酸ガスエンジン、メタンガスエンジン等を使用する場合においても、発電機を発電効率が高い状態で駆動するために、発電機は、最大値又はその近傍の値を維持するように一定の出力が設定され、エンジンによって駆動される。
【0034】
また、発電装置として燃料電池を使用する場合は、電流と電圧との関係を表す特性曲線、すなわち、電流対電圧特性曲線上で燃料電池が通常の駆動状態で駆動され、電流が所定値以下にされるか、又は電圧が所定値以上にされる。例えば、燃料電池の単位電極で、電流が0.2〔A〕以下にされるか、又は電圧が0.8〔V〕以上にされる。
【0035】
そして、本実施の形態においては、前記発電機15を発電効率の高い状態で駆動する時間が発電時間とされる。
【0036】
次に、ハイブリッド型車両において発電機15による発電を行うための車両駆動装置について説明する。
【0037】
図1は本発明の第1の実施の形態における車両駆動装置を示す図である。
【0038】
図において、21はハイブリッド型車両の全体の制御を行う第1の制御ユニットとしての制御部、27はナビゲーション装置である。
【0039】
前記制御部21は、演算装置としてのCPU31、該CPU31が各種の演算処理を行うに当たってワーキングメモリとして使用されるRAM32、制御用のプログラムのほかに、各種のデータが記録されたROM33等を備える。
【0040】
また、前記ナビゲーション装置27は、ナビゲーション装置27の全体の制御を行う第2の制御ユニットとしてのナビゲーション制御部34を備え、該ナビゲーション制御部34は、制御部21と同様に、演算装置としてのCPU、RAM、ROM等を備える。
【0041】
そして、前記ナビゲーション制御部34に、ハイブリッド型車両の現在位置、ハイブリッド型車両の方位、時刻等を検出する現在地検出部としての、かつ、時刻検出部としてのGPSセンサ35、地図データのほかに各種の情報が記録された情報記録部としてのデータ記録部36、通信端末として機能する送受信部としての通信部38等が接続される。
【0042】
前記地図データには、交差点(分岐点を含む。)に関する交差点データ、各交差点間を結ぶ道路及び該道路を構成する道路リンクに関する道路状況を表す道路情報(道路データ)、各種の施設に関する施設データ、経路を探索するために加工された探索データ等が含まれる。
【0043】
また、前記通信部38は、第1の情報提供者としてのVICS(登録商標)センタ等の図示されない道路交通情報センタ等から送られる交通情報、一般情報等の各種の情報を受信する。なお、前記交通情報には、渋滞情報、規制情報、駐車場情報、交通事故情報、サービスエリアの混雑状況情報等が含まれ、一般情報には、ニュース、周囲環境状況を表す周囲環境情報(天気予報のほか、気温、湿度、天候等の実際の天気状況等)等が含まれる。また、前記通信部38は、第2の情報提供者としての情報センタから交通情報、一般情報等の各種の情報を受信することもできる。前記ナビゲーション装置27、道路交通情報センタ、情報センタ等によってナビゲーションシステムが構成される。
【0044】
そして、前記制御部21に、前記インバータ13、17のほかに、図示されない画面によって各種の表示を行い、操作者である運転者に対して通知を行うための第1の出力部としての表示部43、運転者が音声によって所定の入力を行うための音声入力部44a、音声を出力することによって運転者に対して通知を行うための第2の出力部としての音声出力部44b、運転者が操作することによって所定の入力を行うための操作部45、ハイブリッド型車両の車速v〔km/h〕を検出する車速検出部としての車速センサ51、バッテリ14の電圧、すなわち、バッテリ電圧Vb〔V〕を検出する電圧検出部としてバッテリ電圧センサ52、バッテリ14に供給され、又はバッテリ14から供給される電流、すなわち、バッテリ電流Ib〔A〕を検出する電流検出部としてのバッテリ電流センサ53、バッテリ14の温度、すなわち、バッテリ温度tb〔℃〕を検出する温度検出部としてのバッテリ温度センサ54、燃料タンク19からエンジン18に供給されるガソリンの残量、すなわち、燃料残量F〔L〕を検出する燃料残量検出部としての燃料残量センサ55等が接続される。なお、該燃料残量センサ55によって燃料の種類を検出することもできる。また、前記表示部43は、前記画面がタッチパネルによって形成される場合、運転者が操作することによって所定の入力を行うための操作部としても機能する。
【0045】
そして、制御部21、ナビゲーション制御部34、CPU31等によってコンピュータが構成され、データ記録部36、RAM32、ROM33等によって記憶装置又は記録媒体が構成される。また、演算装置として、CPU31に代えてMPU等を使用することができる。
【0046】
前記駆動モータ11、バッテリ14、発電機15、エンジン18、CPU31、GPSセンサ35等によってハイブリッド型車両が構成される。
【0047】
次に、前記ナビゲーション装置27の基本動作について説明する。
【0048】
まず、運転者による操作部45の操作によってナビゲーション装置27が起動されると、ナビゲーション制御部34のCPU(以下、「ナビCPU」という。)のナビ情報取得処理手段は、ナビ情報取得処理を行い、前記地図データを、データ記録部36から取得する(読み出す)か、又は通信部38を介して情報センタ等から取得(受信)する。
【0049】
次に、前記ナビCPUのマッチング処理手段は、マッチング処理を行い、GPSセンサ35から現在位置及び方位を読み込み、地図データから道路データを読み込み、現在位置、方位及び道路データに基づいて、現在位置がいずれの道路リンク上に位置するかを判断することによって、現在位置を特定する。そして、前記ナビCPUの表示処理手段は、表示処理を行い、前記表示部43に地図画面を形成し、該地図画面にハイブリッド型車両の現在位置、現在位置の周辺の地図及び方位を表示する。
【0050】
また、運転者が操作部45を操作して所定の地点を目的地として入力すると、前記ナビCPUの目的地設定処理手段は、目的地設定処理を行い、目的地を設定する。
【0051】
そして、運転者が操作部45を操作して、経路を探索するための条件、すなわち、探索条件を入力すると、前記ナビCPUの経路探索処理手段は、経路探索処理を行い、前記現在位置、目的地、探索条件等を読み込むとともに、地図データのうちの探索データを読み込み、現在位置、目的地及び探索データに基づいて、現在位置で表される出発地から目的地までの経路を前記探索条件で探索し、探索経路を表す経路データを出力する。なお、各道路リンクごとに付与されたリンクコストの合計が最も小さい経路が探索経路とされる。
【0052】
続いて、前記ナビCPUの案内処理手段は、案内処理を行い、前記経路データを読み込み、該経路データに従って前記地図画面に探索経路を表示し、必要に応じて、探索経路を音声で出力して経路案内を行う。
【0053】
次に、前記制御部21の動作について説明する。
【0054】
図3は本発明の第1の実施の形態における制御部の動作を示すメインフローチャート、図4は本発明の第1の実施の形態における距離当たり消費エネルギー算出処理のサブルーチンを示す図、図5は本発明の第1の実施の形態におけるHV走行可能時間算出処理のサブルーチンを示す図、図6は本発明の第1の実施の形態におけるEV走行可能時間算出処理のサブルーチンを示す図、図7は本発明の第1の実施の形態における走行パターン記録部の記録状態を示す第1の図、図8は本発明の第1の実施の形態における走行パターン記録部の記録状態を示す第2の図、図9は本発明の第1の実施の形態における探索経路の例を示す図、図10は本発明の第1の実施の形態における表示部に表示される走行可能範囲の例を示す第1の図、図11は本発明の第1の実施の形態における表示部に表示される走行可能範囲の例を示す第2の図、図12は本発明の第1の実施の形態における表示部に表示される走行可能範囲の例を示す第3の図、図13は本発明の第1の実施の形態における表示部に表示される走行可能範囲の例を示す第4の図、図14は本発明の第1の実施の形態における表示部に表示される走行可能範囲の例を示す第5の図である。
【0055】
まず、CPU31の図示されない情報取得処理手段は、情報取得処理を行い、ナビゲーション装置27からナビゲーション情報として現在位置を取得する(読み込む)(ステップS1)。
【0056】
続いて、CPU31の図示されない走行可能経路取得処理手段は、走行可能経路取得処理を行い、ナビゲーション装置27に、現在位置からハイブリッド型車両を走行させることができる経路、すなわち、現在位置からの走行可能経路を探索するように指示を送り、ナビゲーション装置27から走行可能経路を取得する(ステップS2)。
【0057】
ナビゲーション装置27において、前記経路探索処理手段は、CPU31から前記指示を受けると、地図データの道路情報に基づいて、現在位置の周辺の所定の範囲内において、現在位置を出発地とし、ハイブリッド型車両を走行させることができる目的地のない道なりの経路を前記走行可能経路として探索し、制御部21に送信する。
【0058】
図9において、prは現在位置、kは走行軌跡、Rtj(j=1、2、…、n)は現在位置prと接続され、経路探索処理において探索された走行可能経路、d1は走行可能経路Rt3から走行可能経路Rt4が分岐する分岐点、d2は走行可能経路Rt5から走行可能経路Rt6が分岐する分岐点である。この場合、前記経路探索処理手段は、走行軌跡からみて、現在位置prより前方に存在する走行可能経路Rt1〜Rt4、現在位置prより後方に存在する走行可能経路Rt5、Rt6、走行可能経路Rt3、Rt5から分岐する走行可能経路Rt4、Rt6等を探索する。また、本実施の形態において、前記経路探索処理手段は、走行を開始する時点で、所定の道路種別の道路、例えば、国道、県道等の幹線道路については探索の対象とし、他の道路種別の道路、例えば、市道等の細街路については探索の対象としない。そして、前記経路探索処理手段は、ハイブリッド型車両が前記走行可能経路Rtiの終点の近くに至るのに伴って、市道等の細街路についても探索の対象とする。
【0059】
なお、本実施の形態において、経路探索処理手段は、現在位置prより後方に存在する走行可能経路Rt5、Rt6も探索するようになっているが、現在位置prより前方に存在する走行可能経路Rt1〜Rt4だけを探索するようにすることができる。
【0060】
続いて、CPU31の図示されない距離当たり消費エネルギー算出処理手段は、距離当たり消費エネルギー算出処理を行い、各走行可能経路Rtjについて距離当たり消費エネルギーEuj(j=1、2、…、n)〔kWh/km〕を算出する(ステップS3)。
【0061】
そのために、距離当たり消費エネルギー算出処理手段の状況情報取得処理手段は、状況情報取得処理を行い、ハイブリッド型車両を走行させている間、制御タイミングごとの、ハイブリッド型車両の走行状況及び周囲環境状況を走行履歴として取得する(ステップS3−1)。
【0062】
本実施の形態において、前記走行状況は、ハイブリッド型車両が走行した距離を表す走行距離、ハイブリッド型車両が走行した時間を表す走行時間、運転者がハイブリッド型車両を加速させたり、減速させたりした状況を表す加減速状況等の走行状況指標である。前記加減速状況は、加速地点における加速度αm(m=1、2、…)及び減速地点における減速度βn(n=1、2、…)から成る。なお、前記走行距離は、制御部21に接続された図示されない距離計によって、走行時間は、制御部21に接続された図示されないタイマによって、加減速状況は、制御部21に接続された図示されないアクセルセンサ及びブレーキセンサによって検出され、制御部21に送られる。
【0063】
また、前記周囲環境状況は、ハイブリッド型車両を走行させる際の気温、天候、ハイブリッド型車両を走行させる際の時刻を表す走行時刻等の周囲環境指標である。なお、気温、天候、走行時刻等は、ナビゲーション装置27から読み込むことによって取得することができる。
【0064】
続いて、前記距離当たり消費エネルギー算出処理手段の走行パターン取得処理手段は、走行パターン取得処理を行い、前記走行履歴に基づいて、前記RAM32に形成された図示されない走行パターン記録部を参照し、あらかじめ設定され、走行パターン記録部に記録された走行パターンのうちの、前記走行履歴と類似する走行パターンを類似走行パターンとして取得する(ステップS3−2)。
【0065】
そのために、前記CPU31の図示されない走行パターン設定処理手段は、走行パターン設定処理を行い、ハイブリッド型車両の走行中に収集された情報、すなわち、収集情報にインデックスを付与して、図7に示されるような走行パターンPti(i=1、2、…)をあらかじめ設定し、前記走行パターン記録部に記録する。
【0066】
前記走行パターンPtiは、走行距離、走行時間、加減速状況、気温、天候、走行時刻等の、ハイブリッド型車両の走行態様を表す各情報から成り、各情報は、それぞれインデックスが付与され、走行距離、走行時間、加減速状況等が走行状況のインデックスに、気温、天候、走行時刻等が周囲環境状況のインデックスに分類されて前記走行パターン記録部に記録される。
【0067】
また、本実施の形態においては、同じ経路に沿ってハイブリッド型車両を走行させるたびに、距離当たり消費エネルギーEu〔kWh〕が算出され、前回ハイブリッド型車両を走行させたときに算出された距離当たり消費エネルギーと、今回ハイブリッド型車両を走行させたときに算出された距離当たり消費エネルギーとの差が、次回ハイブリッド型車両を走行パターンPtiで走行させるときに算出される距離当たり消費エネルギーEu〔kWh〕に加算するために、エネルギー加算値として走行状況及び周囲環境状況のインデックスごとに記録される。
【0068】
なお、前記走行パターン取得処理において、前記走行パターン記録部に類似走行パターンがない場合、前記走行パターン取得処理手段は、学習機能によって類似走行パターンを作成することにより取得する。
【0069】
そのために、前記走行パターン取得処理手段は、前記走行パターン記録部を参照し、走行パターンPtiのうちの走行状況及び周囲環境状況のインデックスごとに走行履歴と類似するパターン情報を備えた走行パターンを検索し、各インデックスごとのパターン情報を組み合わせることによって、新たな走行パターンを類似走行パターンPtnとして作成する。例えば、図8に示されるように、類似走行パターンPtnは、走行パターンPt1の走行状況及び走行パターンPt2の周囲環境状況の各走行パターン情報から成る。
【0070】
次に、前記距離当たり消費エネルギー算出処理手段の消費パワー算出処理手段は、消費パワー算出処理を行い、取得された類似走行パターンPtnに基づいて、ハイブリッド型車両を各走行可能経路Rtjに沿って走行させる際に必要な消費パワーPwj(j=1、2、…、n)〔kW〕を算出する(ステップS3−3)。
【0071】
ここで、類似走行パターンPtnから走行距離Lpj(j=1、2、…、n)〔km〕及び走行時間Tpj(j=1、2、…、n)〔h〕を読み出すことができるので、ハイブリッド型車両を各走行可能経路Rtjに沿って走行させる際の平均車速avj(j=1、2、…、n)〔km/h〕を、
avj=Lpj/Tpj
によって算出することができる。なお、本実施の形態においては、平均車速avj〔km/h〕を、走行距離Lpj〔km〕及び走行時間Tpj〔h〕に基づいて算出するようになっているが、あらかじめ走行距離Lp〔km〕及び走行時間Tp〔h〕に基づいて算出し、走行パターンPtiにおけるインデックスとして記録することができる。また、現在の走行状況に基づいて、RAM32に記録された過去のハイブリッド型車両の走行履歴を参照し、平均車速avj〔km/h〕を推定することができる。
【0072】
ところで、発電機15による発電を行いながらハイブリッド型車両を走行可能経路Rtjに沿ってHV走行で走行させる際にハイブリッド型車両が受ける走行抵抗をRj(j=1、2、…、n)〔N〕とすると、ハイブリッド型車両を走行可能経路Rtjに沿って走行させる際に走行抵抗Rj〔N〕によって消費されるパワー、すなわち、走行抵抗消費パワーPdj(j=1、2、…、n)〔kW〕は、
Pdj=Rj・avj
で表される。
【0073】
また、ハイブリッド型車両を走行可能経路Rtjに沿って走行させる際にエアコン、ライト、ナビゲーション装置27等の補機によって消費されるパワー(電力)、すなわち、補機消費パワーをPhj(j=1、2、…、n)〔kW〕とし、ハイブリッド型車両の制動に伴って駆動モータ11で回生されるパワー(電力)、すなわち、回生電力をPkj(j=1、2、…、n)〔kW〕とすると、ハイブリッド型車両を走行させる際に必要な前記消費パワーPwj〔kW〕は、
Pwj=Pdj+Phj−Pkj
=Rj・avj+Phj−Pkj
で表される。
【0074】
なお、前記走行抵抗Rj〔N〕は、類似走行パターンPtnに従ってハイブリッド型車両を走行させる際の空気抵抗をRa〔N〕とし、転がり抵抗をRr〔N〕とし、登坂抵抗をRs〔N〕とし、加速抵抗をRg〔N〕としたとき、
Rj=Ra+Rr+Rs+Rg
で表され、類似走行パターンPtnの情報に基づいて算出される。
【0075】
なお、前記空気抵抗Ra〔N〕は、ハイブリッド型車両を走行させる際に空気から受ける抵抗であり、空気密度をρとし、空気抵抗係数をCdとし、ハイブリッド型車両を前面から見たときの投影面積をAとしたとき、
Ra=(1/2)ρ・Cd・A・(av)2
で表すことができる。また、前記転がり抵抗Rr〔N〕は、ハイブリッド型車両を走行させる際にタイヤと路面との摩擦によって路面から受ける抵抗であり、タイヤと路面との摩擦係数をμrとし、ハイブリッド型車両の質量をmとし、重力加速度をgとしたとき、
Rr=μr・m・g
で表される。そして、前記登坂抵抗Rs〔N〕は、ハイブリッド型車両を登坂路を走行させる際に発生する抵抗であり、勾(こう)配をθkとしたとき、
Rs=m・g・Σsinθk
で表される。また、前記加速抵抗Rg〔N〕は、ハイブリッド型車両を加速させるのに伴って発生する抵抗であり、加速度をαmとしたとき、
Rg=m・g・Σαm
で表される。
【0076】
そして、前記補機消費パワーPhj〔kW〕は気温、天候、走行時刻等に基づいて、回生電力Pkj〔kW〕は減速度βn等に基づいて算出することができる。
【0077】
このようにして、ハイブリッド型車両を各走行可能経路Rtjに沿って走行させる際に必要な消費パワーPwj〔kW〕が算出されると、前記距離当たり消費エネルギー算出処理手段のパワー・エネルギー変換処理手段は、パワー・エネルギー変換処理を行い、消費パワーPwj〔kW〕を、ハイブリッド型車両を各走行可能経路Rtjに沿って走行させる際の距離当たり消費エネルギーEuj〔kWh/km〕
Euj=Pwj/avj
に変換する(ステップS3−4)。
【0078】
続いて、前記CPU31の図示されない第1の走行可能時間算出処理手段としてのHV走行可能時間算出処理手段は、第1の走行可能時間算出処理としてのHV走行可能時間算出処理を行い、発電機15による発電を行いながらハイブリッド型車両を走行可能経路Rtjに沿って走行させることができる(走行可能な)時間、すなわち、第1の走行可能時間としてのHV走行可能時間Tj(j=1、2、…、n)〔h〕を算出する(ステップS4)。
【0079】
そのために、HV走行可能時間算出処理手段の情報取得処理手段は、情報取得処理を行い、平均車速avj〔km/h〕及び距離当たり消費エネルギーEuj〔kWh/km〕を取得するとともに(ステップS4−1)、バッテリ残量SOC〔%〕及び燃料残量センサ55によって検出された燃料残量F〔L〕を取得する(ステップS4−2)。
【0080】
なお、バッテリ残量SOC〔%〕は、バッテリ電圧センサ52によって検出されたバッテリ電圧Vb〔V〕、バッテリ電流センサ53によって検出されたバッテリ電流Ib〔A〕、及びバッテリ温度センサ54によって検出されたバッテリ温度tb〔℃〕に基づいてあらかじめ算出される。この場合、バッテリ残量SOC〔%〕は、HV走行可能時間Tj〔h〕を制限する第1の制限要素となり、燃料残量F〔L〕は、HV走行可能時間Tj〔h〕を制限する第2の制限要素となる。
【0081】
続いて、前記HV走行可能時間算出処理手段の発電エネルギー算出処理手段は、発電エネルギー算出処理を行い、発電機15の出力Pg〔N〕及び平均車速avj〔km/h〕を取得し、発電機15の出力Pg〔N〕及び平均車速avj〔km/h〕に基づいて距離当たり発電エネルギーGuj〔kWh/km〕
Guj=Pg/avj
を算出する(ステップS4−3)。
【0082】
次に、HV走行可能時間算出処理手段の発電可能時間算出処理手段は、発電可能時間算出処理を行い、エンジン18を駆動したときのガソリンの単位量当たりの発熱量(熱エネルギー)をHf〔kWh/L〕とし、発電機15の発電効率をηとし、発電機15を一定の出力Pg〔N〕で駆動して発電を行った場合に、燃料残量F〔L〕が0(零)になるまでの、燃料残量F〔L〕によって制限される第1の発電可能時間Tfj(j=1、2、…、n)〔h〕
Tfj=F・Hf・η/Pg
を算出する(ステップS4−4)。
【0083】
続いて、前記発電可能時間算出処理手段は、発電機15を一定の出力Pg〔N〕で駆動し、ハイブリッド型車両を平均車速avj〔km/h〕で走行させて発電を行った場合に、残存エネルギーB〔kWh〕が0(零)になるまでの、バッテリ残量SOC〔%〕によって制限される第2の発電可能時間Tbj(j=1、2、…、n)〔h〕
Tbj=(B/(Euj−Guj))/avj
を算出する(ステップS4−5)。
【0084】
なお、前記残存エネルギーB〔kWh〕は、バッテリ14に残存するエネルギーを表し、前記バッテリ残量SOC〔%〕、バッテリ14の仕様によって決まる総バッテリ容量Qb、残存最小容量X0〔%〕、残存最大容量Xmax〔%〕及びバッテリ14の劣化に伴う補正係数γに基づいて、
B=γ・((SOC−X0)/(Xmax−X0))・Qb
で表される。
【0085】
そして、HV走行可能時間算出処理手段のHV走行可能時間決定処理手段は、HV走行可能時間決定処理を行い、前記第1、第2の発電可能時間Tfj、Tbj〔h〕のうちの短い方の発電可能時間をHV走行可能時間Tj〔h〕として決定する(ステップS4−6)。
【0086】
続いて、前記CPU31の図示されない第2の走行可能時間算出処理手段としてのEV走行可能時間算出処理手段は、第2の走行可能時間算出処理としてのEV走行可能時間算出処理を行い、発電機15による発電を行うことなくハイブリッド型車両を走行可能経路Rtjに沿ってEV走行で走行させることができる時間、すなわち、第2の走行可能時間としてのEV走行可能時間Tej(j=1、2、…、n)〔h〕を算出する(ステップS5)。
【0087】
そのために、前記EV走行可能時間算出処理手段の情報取得処理手段は、情報取得処理を行い、平均車速avj〔km/h〕及び距離当たり消費エネルギーEuj〔kWh/km〕を取得し(ステップS5−1)、前記EV走行可能時間算出処理手段のEV走行可能時間決定処理手段は、EV走行可能時間決定処理を行い、バッテリ残量SOC〔%〕を取得し、EV走行可能時間Tej〔h〕
Tej=(SOC/Euj)/avj
を決定する(ステップS5−2)。
【0088】
次に、CPU31の図示されない第1の走行可能距離算出処理手段としてのHV走行可能距離算出処理手段は、第1の走行可能距離算出処理としてのHV走行可能距離算出処理を行い、HV走行可能時間Tj〔h〕を取得し、前記ハイブリッド型車両を走行可能経路Rtjに沿って前記HV走行可能時間Tj〔h〕の間HV走行で走行させることができる(走行可能な)距離、すなわち、第1の走行可能距離としてのHV走行可能距離Lj(j=1、2、…、n)〔km〕
Lj=Tej・avj
を算出する(ステップS6)。
【0089】
また、CPU31の図示されない第2の走行可能距離算出処理手段としてのEV走行可能距離算出処理手段は、第2の走行可能距離算出処理としてのEV走行可能距離算出処理を行い、EV走行可能時間Tej〔h〕を取得し、前記ハイブリッド型車両を走行可能経路Rtjに沿って前記EV走行可能時間Tej〔h〕の間EV走行で走行させることができる距離、すなわち、第2の走行可能距離としてのEV走行可能距離Lej(j=1、2、…、n)〔km〕
Lej=Tej・avj
を算出する(ステップS7)。
【0090】
続いて、前記CPU31の図示されない到着場所指定判断処理手段は、到着場所指定判断処理を行い、ハイブリッド型車両が走行を終了した後に到着する場所の指定があるかどうかを判断する(ステップS8)。すなわち、到着場所指定判断処理手段は、ハイブリッド型車両をHV走行可能時間Tj〔h〕又はEV走行可能時間Tej〔h〕走行させた後に、運転者が指定した場所、すなわち、指定場所、例えば、近隣の宿泊施設、充電スタンド等までハイブリッド型車両を更に走行させる必要があるかどうかを判断する。
【0091】
そのために、到着場所指定判断処理手段は、表示部43において、運転者に到着する場所の指定をするように通知する。
【0092】
到着する場所の指定がある場合、CPU31の図示されない走行可能距離補正処理手段は、走行可能距離補正処理を行い、指定場所に到着することができるように、HV走行可能距離Lj〔km〕及びEV走行可能距離Lej〔km〕の補正を行う(ステップS9)。
【0093】
例えば、現在位置prからハイブリッド型車両をHV走行可能距離Lj〔km〕又はEV走行可能距離Lej〔km〕走行させた後に、運転者によって到着場所が指定され、ハイブリッド型車両を更に走行させる必要がある場合、走行可能経路Rtj上の現在位置prからHV走行可能距離Lj〔km〕又はEV走行可能距離Lej〔km〕離れた地点を走行可能地点とすると、走行可能地点から更にハイブリッド型車両を指定場所まで走行させる必要がある。
【0094】
そこで、前記走行可能距離補正処理手段は、HV走行可能距離Lj〔km〕及びEV走行可能距離Lej〔km〕に、指定場所の位置に対応させて、所定の補正係数を乗算させるか、所定の距離を加算することによってHV走行可能距離Lj〔km〕及びEV走行可能距離Lej〔km〕の補正を行う。
【0095】
また、到着する場所の指定がない場合、前記走行可能距離補正処理手段は、自宅に戻ることができるように、HV走行可能距離Lj〔km〕及びEV走行可能距離Lej〔km〕の補正を行う(ステップS10)。
【0096】
この場合、前記走行可能距離補正処理手段は、HV走行可能距離Lj〔km〕及びEV走行可能距離Lej〔km〕に、自宅の位置に対応させて、所定の補正係数を乗算させるか、所定の距離を加算することによってHV走行可能距離Lj〔km〕及びEV走行可能距離Lej〔km〕の補正を行う。
【0097】
このようにして、HV走行可能距離Lj〔km〕及びEV走行可能距離Lej〔km〕の補正が行われると、CPU31の図示されない走行可能範囲表示処理手段は、走行可能範囲表示処理を行い、表示部43に走行可能範囲表示画面を形成し、該走行可能範囲表示画面に、現在位置pr、並びに補正が行われた後のHV走行可能距離Lj〔km〕及びEV走行可能距離Lej〔km〕によって設定される第1の走行可能範囲としてのHV走行可能範囲及び第2の走行可能範囲としてのEV走行可能範囲を表示する(ステップS11)。なお、HV走行可能距離Lj〔km〕は、発電機15による発電を行いながらハイブリッド型車両を走行可能経路Rtjに沿って走行させることができる範囲であり、EV走行可能距離Lej〔km〕は、発電機15による発電を行うことなくハイブリッド型車両を走行可能経路Rtjに沿って走行させることができる範囲である。
【0098】
そのために、前記走行可能範囲表示処理手段は、図10に示されるように、各走行可能経路Rtj上の現在位置prからHV走行可能距離Lj〔km〕離れた地点ptj(j=1、2、…、n)間を所定の形状の線、本実施の形態においては、直線で結び、直線によって包囲される範囲をHV走行可能範囲Ar1とし、該HV走行可能範囲Ar1を前記走行可能範囲表示画面に表示する。
【0099】
また、前記走行可能範囲表示処理手段は、図11に示されるように、各走行可能経路Rtj上の現在位置prからEV走行可能距離Lej〔km〕離れた地点ptej(j=1、2、…、n)間を所定の形状の線、本実施の形態においては、直線で結び、直線によって包囲される範囲をEV走行可能範囲Are1とし、該EV走行可能範囲Are1を前記走行可能範囲表示画面に表示する。
【0100】
なお、前記走行可能範囲表示処理手段は、図12に示されるように、HV走行可能範囲Ar1及びEV走行可能範囲Are1を前記走行可能範囲表示画面に重ねて表示することができる。
【0101】
そして、CPU31の図示されない走行継続判断処理手段は、走行継続判断処理を行い、ハイブリッド型車両の走行を継続するかどうかを判断する(ステップS12)。ハイブリッド型車両の走行を継続する場合、前記情報取得処理手段は再び現在位置を取得し、ハイブリッド型車両の走行を継続する場合、処理を終了する。
【0102】
ところで、発電機15による発電を行いながらハイブリッド型車両を走行可能経路Rtjに沿って走行させると、現在位置prが変化し、バッテリ残量SOC〔%〕及び燃料残量F〔L〕が少なくなるので、HV走行可能距離Lj〔km〕は短くなり、図13に示されるように、走行可能範囲Ar1は小さくなり、Ar1’になる。
【0103】
例えば、ハイブリッド型車両を走行可能経路Rt4に沿って走行させると、現在位置prは走行可能経路Rt4上を移動する。そして、走行可能範囲Ar1がAr1’になるのに伴って、地点pt4は移動しないのに対して、地点pt1〜pt3、pt5、pt6はそれぞれ走行可能経路Rt1〜Rt3、Rt5、Rt6上を移動し、pt1’〜pt3’、pt5’、pt6’になる。
【0104】
また、発電機15による発電を行うことなく、ハイブリッド型車両を走行可能経路Rtjに沿って走行させると、現在位置prが変化し、バッテリ残量SOC〔%〕が少なくなるので、EV走行可能距離Lej〔km〕は短くなり、EV走行可能範囲Are1は小さくなる。
【0105】
なお、ハイブリッド型車両を走行可能経路Rtjに沿って走行させる間に現在位置prが変化し、HV走行可能範囲Ar1及びEV走行可能範囲Are1が所定以上小さくなると、地点pt1〜pt6、pte1〜pte6を結ぶことができなくなる。
【0106】
そこで、HV走行可能範囲Ar1及びEV走行可能範囲Are1が所定以上小さくなると、ナビCPUの前記経路探索処理手段は、幹線道路だけでなく、細街路も探索対象として走行可能経路を探索し、前記走行可能範囲表示処理手段は、細街路を含む走行可能経路上の地点間を結んでHV走行可能範囲Ar1及びEV走行可能範囲Are1を表示する。
【0107】
なお、細街路を探索対象にすることができない場合、前記走行可能範囲表示処理手段は、例えば、図14に示されるように、走行可能経路Rt4の複数の点、例えば、q1、q2を設定し、点q1、q2を含む所定の形状、例えば、楕(だ)円形の形状を有する領域を走行可能範囲Are1’とする。
【0108】
このように、本実施の形態においては、距離当たり消費エネルギーEuj〔kWh/km〕、距離当たり発電エネルギーGuj〔kWh/km〕、前記バッテリ14のバッテリ残量SOC〔%〕及び前記エンジン18の燃料残量F〔L〕に基づいて、ハイブリッド型車両を走行させることができるHV走行可能時間Tj〔h〕及びEV走行可能時間Tej〔h〕が算出され、HV走行可能時間Tj〔h〕及びEV走行可能時間Tej〔h〕並びに平均車速avj〔km/h〕に基づいてHV走行可能距離Lj〔km〕及びEV走行可能距離Lej〔km〕が算出され、前記HV走行可能距離Lj〔km〕及びEV走行可能距離Lej〔km〕に基づいて、ハイブリッド型車両を走行させることができるHV走行可能範囲Ar1及びEV走行可能範囲Aer1が算出され、表示部43に表示されるので、目的地を設定することなくハイブリッド型車両を走行させる場合に、運転者は、どこまで走行させることができるかを容易に知ることができ、安心してハイブリッド型車両を走行させることができる。
【0109】
次に、走行パターンPtiを使用することなく、ナビゲーション情報に基づいて、距離当たり消費エネルギーEuj〔kWh/km〕を算出することができるようにした本発明の第2の実施の形態について説明する。なお、第1の実施の形態と同じ構造を有するものについては、同じ符号を付与し、同じ構造を有することによる発明の効果については同実施の形態の効果を援用する。
【0110】
図15は本発明の第2の実施の形態における距離当たり消費エネルギー算出処理のサブルーチンを示す図である。
【0111】
まず、前記距離当たり消費エネルギー算出処理手段の情報取得処理手段は、情報取得処理を行い、ナビゲーション装置27(図1)から、情報記録部としてのデータ記録部36に記録された道路情報(勾配、路面情報等)、並びに送受信部としての通信部38によって取得された交通情報(渋滞情報、車の流れ、車速等)及び周囲環境情報(気温、天候等)を取得する(ステップS3−11)。なお、前記走行可能経路Rtjのうちの所定の走行可能経路が利用頻度の高い道路である場合は、前記道路情報、交通情報等をRAM32にあらかじめ記録しておくことができる。
【0112】
次に、距離当たり消費エネルギー算出処理手段の平均車速算出処理手段は、平均車速算出処理を行い、渋滞情報、車の流れ、車速等の交通情報に基づいて、ハイブリッド型車両を走行可能経路Rtjに沿って走行させる際の平均車速avj〔km/h〕を算出する(ステップS3−12)。
【0113】
続いて、距離当たり消費エネルギー算出処理手段の走行抵抗消費パワー算出処理手段は、走行抵抗消費パワー算出処理を行い、ナビゲーション情報に基づいて、走行抵抗R〔N〕を算出し、ハイブリッド型車両を走行可能経路Rtjに沿って走行させる際に走行抵抗R〔N〕によって消費される走行抵抗消費パワーPdj〔kW〕
Pdj=R・avj
を算出する(ステップS3−13)。
【0114】
なお、前記走行抵抗R〔N〕は、ハイブリッド型車両を走行可能経路Rtjに沿って走行させる際の空気抵抗をRa〔N〕とし、転がり抵抗をRr〔N〕とし、登坂抵抗をRs〔N〕とし、加速抵抗をRg〔N〕としたとき、
R=Ra+Rr+Rs+Rg
で表される。
【0115】
次に、距離当たり消費エネルギー算出処理手段の補機消費パワー算出処理手段は、補機消費パワー算出処理を行い、気温、天候等の周囲環境情報に基づいて、ハイブリッド型車両を走行可能経路Rtjに沿って走行させる際に補機によって消費される補機消費パワーPhj〔kW〕を算出し、距離当たり消費エネルギー算出処理手段の回生消費パワー算出処理手段は、回生消費パワー算出処理を行い、勾配等の道路情報、渋滞情報、車の流れ、車速等の交通情報等に基づいて、ハイブリッド型車両を走行可能経路Rtjに沿って走行させる際に制動に伴って駆動モータ11で回生される回生電力Pkj〔kW〕を算出する(ステップS3−14)。
【0116】
続いて、距離当たり消費エネルギー算出処理手段の距離当たり消費エネルギー決定処理手段は、距離当たり消費エネルギー決定処理を行い、ハイブリッド型車両を走行可能経路Rtjに沿って走行させる際に必要な消費パワーPwj〔kW〕
Pwj=Pdj+Phj−Pkj
=R・avj+Phj−Pkj
を算出し、該消費パワーPwj〔kW〕及び平均車速avj〔km/h〕を取得し、消費パワーPwj〔kW〕及び平均車速avj〔km/h〕に基づいて距離当たり消費エネルギーEuj〔kWh/km〕
Euj=Pwj/avj
を決定する(ステップS3−15)。
【0117】
なお、本発明は前記各実施の形態に限定されるものではなく、本発明の趣旨に基づいて種々変形させることが可能であり、それらを本発明の範囲から排除するものではない。
【符号の説明】
【0118】
11 駆動モータ
14 バッテリ
15 発電機
18 エンジン
31 CPU
35 GPSセンサ
43 表示部
Ar1 HV走行可能範囲
Are1 EV走行可能範囲
avj 平均車速
Euj 距離当たり消費エネルギー
F 燃料残量
Lj HV走行可能距離
Lej EV走行可能距離
pr 現在位置
Pwj 消費パワー
Rtj 走行可能経路
Tj HV走行可能時間
Tej EV走行可能時間
【特許請求の範囲】
【請求項1】
蓄電装置と、
発電装置と、
該発電装置を駆動するエンジンと、
前記蓄電装置及び発電装置と接続され、蓄電装置及び発電装置から供給される電力によって駆動される駆動モータと、
現在位置を検出する現在地検出部と、
道路情報に基づいて、現在位置を出発地とし、電動駆動車両を走行させることができる道なりの経路を走行可能経路として探索する経路探索処理手段と、
電動駆動車両を前記走行可能経路に沿って走行させる際に必要な消費パワーを算出し、該消費パワー及び平均車速に基づいて距離当たり消費エネルギー消費パワーを算出する距離当たり消費エネルギー算出処理手段と、
前記距離当たり消費エネルギーに基づいて、電動駆動車両を走行可能経路に沿って走行させることができる走行可能時間を算出する走行可能時間算出処理手段と、
前記走行可能時間及び平均車速に基づいて走行可能距離を算出する走行可能距離算出処理手段と、
前記走行可能距離に基づいて、電動駆動車両を走行可能経路に沿って走行させることができる走行可能範囲を算出する走行可能範囲算出処理手段と、
前記走行可能範囲を表示部に表示する走行可能範囲表示処理手段とを有することを特徴とする電動駆動車両。
【請求項2】
前記発電装置の出力及び平均車速に基づいて距離当たり発電エネルギーを算出する発電エネルギー算出処理手段を有するとともに、
前記走行可能範囲算出処理手段は、距離当たり消費エネルギー、距離当たり発電エネルギー、蓄電装置のバッテリ残量及びエンジンに供給される燃料の残量に基づいて前記走行可能時間を算出する請求項1に記載の電動駆動車両。
【請求項3】
前記走行可能時間算出処理手段は、発電装置による発電を行いながら電動駆動車両を走行可能経路に沿って走行させることができる第1の走行可能時間を算出し、
前記走行可能距離算出処理手段は、発電装置による発電を行いながら電動駆動車両を走行可能経路に沿って走行させることができる第1の走行可能距離を算出し、
前記走行可能範囲算出処理手段は、発電装置による発電を行いながら電動駆動車両を走行可能経路に沿って走行させることができる第1の走行可能範囲を算出する請求項1又は2に記載の電動駆動車両。
【請求項4】
前記第1の走行可能時間は、前記エンジンに供給される燃料の残量によって制限される第1の発電可能時間、及び前記蓄電装置のバッテリ残量によって制限される第2の発電可能時間のうちの短い方の発電可能時間である請求項3に記載の電動駆動車両。
【請求項5】
前記第1の発電可能時間は、一定の出力で発電装置を駆動したときに前記エンジンに供給される燃料の残量によって制限される時間である請求項4に記載の電動駆動車両。
【請求項6】
前記走行可能時間算出処理手段は、距離当たり消費エネルギー、前記蓄電装置のバッテリ残量及び平均車速に基づいて走行可能時間を算出する請求項1に記載の電動駆動車両。
【請求項7】
前記走行可能時間算出処理手段は、発電装置による発電を行うことなく電動駆動車両を走行可能経路に沿って走行させることができる第2の走行可能時間を算出し、
前記走行可能距離算出処理手段は、発電装置による発電を行うことなく電動駆動車両を走行可能経路に沿って走行させることができる第2の走行可能距離を算出し、
前記走行可能範囲算出処理手段は、発電装置による発電を行うことなく電動駆動車両を走行可能経路に沿って走行させることができる第2の走行可能範囲を算出する請求項1に記載の電動駆動車両。
【請求項8】
前記消費パワーは、走行抵抗によって消費されるパワー、補機によって消費されるパワー及び駆動モータによって回生されるパワーから成る請求項1〜7のいずれか1項に記載の電動駆動車両。
【請求項9】
電動駆動車両を走行可能距離走行させた後に指定の場所まで更に走行させる必要があるか、又は自宅に戻るかによって、走行可能距離の補正を行う走行可能距離補正処理手段を有する請求項1〜8のいずれか1項に記載の電動駆動車両。
【請求項1】
蓄電装置と、
発電装置と、
該発電装置を駆動するエンジンと、
前記蓄電装置及び発電装置と接続され、蓄電装置及び発電装置から供給される電力によって駆動される駆動モータと、
現在位置を検出する現在地検出部と、
道路情報に基づいて、現在位置を出発地とし、電動駆動車両を走行させることができる道なりの経路を走行可能経路として探索する経路探索処理手段と、
電動駆動車両を前記走行可能経路に沿って走行させる際に必要な消費パワーを算出し、該消費パワー及び平均車速に基づいて距離当たり消費エネルギー消費パワーを算出する距離当たり消費エネルギー算出処理手段と、
前記距離当たり消費エネルギーに基づいて、電動駆動車両を走行可能経路に沿って走行させることができる走行可能時間を算出する走行可能時間算出処理手段と、
前記走行可能時間及び平均車速に基づいて走行可能距離を算出する走行可能距離算出処理手段と、
前記走行可能距離に基づいて、電動駆動車両を走行可能経路に沿って走行させることができる走行可能範囲を算出する走行可能範囲算出処理手段と、
前記走行可能範囲を表示部に表示する走行可能範囲表示処理手段とを有することを特徴とする電動駆動車両。
【請求項2】
前記発電装置の出力及び平均車速に基づいて距離当たり発電エネルギーを算出する発電エネルギー算出処理手段を有するとともに、
前記走行可能範囲算出処理手段は、距離当たり消費エネルギー、距離当たり発電エネルギー、蓄電装置のバッテリ残量及びエンジンに供給される燃料の残量に基づいて前記走行可能時間を算出する請求項1に記載の電動駆動車両。
【請求項3】
前記走行可能時間算出処理手段は、発電装置による発電を行いながら電動駆動車両を走行可能経路に沿って走行させることができる第1の走行可能時間を算出し、
前記走行可能距離算出処理手段は、発電装置による発電を行いながら電動駆動車両を走行可能経路に沿って走行させることができる第1の走行可能距離を算出し、
前記走行可能範囲算出処理手段は、発電装置による発電を行いながら電動駆動車両を走行可能経路に沿って走行させることができる第1の走行可能範囲を算出する請求項1又は2に記載の電動駆動車両。
【請求項4】
前記第1の走行可能時間は、前記エンジンに供給される燃料の残量によって制限される第1の発電可能時間、及び前記蓄電装置のバッテリ残量によって制限される第2の発電可能時間のうちの短い方の発電可能時間である請求項3に記載の電動駆動車両。
【請求項5】
前記第1の発電可能時間は、一定の出力で発電装置を駆動したときに前記エンジンに供給される燃料の残量によって制限される時間である請求項4に記載の電動駆動車両。
【請求項6】
前記走行可能時間算出処理手段は、距離当たり消費エネルギー、前記蓄電装置のバッテリ残量及び平均車速に基づいて走行可能時間を算出する請求項1に記載の電動駆動車両。
【請求項7】
前記走行可能時間算出処理手段は、発電装置による発電を行うことなく電動駆動車両を走行可能経路に沿って走行させることができる第2の走行可能時間を算出し、
前記走行可能距離算出処理手段は、発電装置による発電を行うことなく電動駆動車両を走行可能経路に沿って走行させることができる第2の走行可能距離を算出し、
前記走行可能範囲算出処理手段は、発電装置による発電を行うことなく電動駆動車両を走行可能経路に沿って走行させることができる第2の走行可能範囲を算出する請求項1に記載の電動駆動車両。
【請求項8】
前記消費パワーは、走行抵抗によって消費されるパワー、補機によって消費されるパワー及び駆動モータによって回生されるパワーから成る請求項1〜7のいずれか1項に記載の電動駆動車両。
【請求項9】
電動駆動車両を走行可能距離走行させた後に指定の場所まで更に走行させる必要があるか、又は自宅に戻るかによって、走行可能距離の補正を行う走行可能距離補正処理手段を有する請求項1〜8のいずれか1項に記載の電動駆動車両。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【公開番号】特開2013−75562(P2013−75562A)
【公開日】平成25年4月25日(2013.4.25)
【国際特許分類】
【出願番号】特願2011−215432(P2011−215432)
【出願日】平成23年9月29日(2011.9.29)
【出願人】(591261509)株式会社エクォス・リサーチ (1,360)
【Fターム(参考)】
【公開日】平成25年4月25日(2013.4.25)
【国際特許分類】
【出願日】平成23年9月29日(2011.9.29)
【出願人】(591261509)株式会社エクォス・リサーチ (1,360)
【Fターム(参考)】
[ Back to top ]