
電圧変換装置、車両および電圧変換装置の制御方法
【課題】応答性が改善された電圧変換装置およびそれを搭載する車両を提供する。
【解決手段】電圧変換装置(30)は、リアクトルLと、電流検出部(SE)と、スイッチング素子(TR1)を含む第1の電流制御部と、整流素子(D2)を含む第2の電流制御部と、スイッチング制御部(50)とを備える。スイッチング制御部(50)は、電圧指令値(Vfcr)に基づき算出した目標デューティー比とリアクトル電流の実デューティー比とに基づいて活性化信号(MUP)のデューティー比を決定する。スイッチング制御部(50)は、電流検出部(SE)の出力をモニタしてリアクトル電流の増加期間および減少期間を抽出し、増加期間および減少期間に基づいて実デューティー比を求める。
【解決手段】電圧変換装置(30)は、リアクトルLと、電流検出部(SE)と、スイッチング素子(TR1)を含む第1の電流制御部と、整流素子(D2)を含む第2の電流制御部と、スイッチング制御部(50)とを備える。スイッチング制御部(50)は、電圧指令値(Vfcr)に基づき算出した目標デューティー比とリアクトル電流の実デューティー比とに基づいて活性化信号(MUP)のデューティー比を決定する。スイッチング制御部(50)は、電流検出部(SE)の出力をモニタしてリアクトル電流の増加期間および減少期間を抽出し、増加期間および減少期間に基づいて実デューティー比を求める。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、電圧変換装置、車両および電圧変換装置の制御方法に関し、特に2つの電圧系の間に設置され双方向に電流供給が可能な電圧変換装置とそれを備える車両および電圧変換装置に関する。
【背景技術】
【0002】
特開2003−250276号公報(特許文献1)には、出力電流値、出力電圧値などから、リアクトル電流を推定し、推定したリアクトル電流のパターンに基づいてデッドタイムを補正するPWM(パルス幅変調)インバータが開示されている。
【特許文献1】特開2003−250276号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
インバータや電圧コンバータでは、電圧指令値(目標電圧)と入力電圧の差に応じて内部素子の制御を行なうフィードフォワード制御と、電圧指令値と出力電圧の差に応じて内部素子の制御を行なうフィードバック制御とを組み合わせて用いる場合がある。フィードバック制御では、PID(比例積分微分)制御などが用いられる場合が多い。
【0004】
近年、電気自動車、ハイブリッド自動車および燃料電池自動車等のように、車両推進用の駆動源として交流式モータを採用し、この交流式モータを駆動するインバータ装置を搭載する自動車が登場している。
【0005】
このような車両では、車両推進用モータを駆動するための高電圧バッテリと低電圧の補機用バッテリなどの、2つ以上の異なる電圧のバッテリを搭載するケースがある。
【0006】
また、燃料電池を搭載する自動車では、稼動開始から安定出力にいたるまで燃料電池の出力電圧が変動する。このため駆動用の電力を安定的に確保するには燃料電池と二次電池とを組み合わせ、電圧変換器で接続して使用することが検討されている。
【0007】
車両状態に応じて燃料電池の出力電圧も二次電池の出力電圧も変動するので、この間に接続される電圧変換器は、車両に必要とされるパワーに応じて、二次電池側から燃料電池側に電流を供給したり、逆に燃料電池側から二次電池に充電したりする動作を行なう。
【0008】
このため、車両の加速、道路の傾斜等に応じて必要な電圧を速やかに出力できる応答性の良い電圧変換器が要求される。
【0009】
しかしながら、リアクトルを含むインバータや電圧コンバータにおいて、リアクトル電流に基づいてデッドタイムを補正する技術は知られているが、ここで用いられるリアクトル電流は、たとえば所定の演算式で得られる推定値やローパスフィルタを通過させて得られる電流平均値であった。推定値や平均値に基づいて補正を行なうのでは、リアクトル電流の電流の向きが切り替わる点を正確に反映させた実デューティー比とのずれが生じてしまい、正確な補正ができない。
【0010】
部品特性のバラツキや経年変化によってこのずれが拡大し、補正値が最適でなくなる場合もありうる。すると、結果的に電圧変換器の応答性が悪化することになる。
【0011】
この発明の目的は、応答性が改善された電圧変換装置およびそれを搭載する車両を提供することである。
【課題を解決するための手段】
【0012】
この発明は、要約すると、電圧変換装置であって、リアクトルと、リアクトルを通過するリアクトル電流を検出する電流検出部と、リアクトルの一方端と第1の電源ノードとの間に設けられ、第1の活性化信号に応じて導通する第1のスイッチング素子を少なくとも含む第1の電流制御部と、第1の電源ノードとは電位の異なる第2の電源ノードとリアクトルの一方端との間に設けられ、第1の整流素子を少なくとも含む第2の電流制御部と、第1の活性化信号のデューティー比を決定するスイッチング制御部とを備える。スイッチング制御部は、電圧指令値に基づき算出した目標デューティー比とリアクトル電流の実デューティー比とに基づいて第1の活性化信号のデューティー比を決定する。スイッチング制御部は、電流検出部の出力をモニタしてリアクトル電流の増加期間および減少期間を抽出し、増加期間および減少期間に基づいて実デューティー比を求める。
【0013】
好ましくは、スイッチング制御部は、第1の電源ノードの電圧と電圧指令値とに基づいてフィードフォワード項を算出し、フィードフォワード項に対して実デューティー比に応じた補正を行なうフィードフォワード処理部を含む。
【0014】
好ましくは、スイッチング制御部は、目標デューティー比に対して電圧指令値と出力電圧値との偏差に基づくフィードバック制御を用いた補正を実行する。フィードバック制御は、積分制御を含む。スイッチング制御部は、積分制御の積分項が蓄積される積分処理部と、電流検出部の出力を受けて実デューティー比を求め、積分処理部に対して目標デューティー比と実デューティー比とのずれに応じた補正値を出力する積分項補正部とを含む。
【0015】
好ましくは、第1の電流制御部は、第1のスイッチング素子と並列にリアクトルの一方端と第1の電源ノードとの間に設けられる第2の整流素子をさらに含む。第2の電流制御部は、第1の整流素子と並列にリアクトルの一方端と第2の電源ノードとの間に設けられる第2のスイッチング素子をさらに含む。
【0016】
より好ましくは、第2のスイッチング素子は、第2の活性化信号に応じて導通する。スイッチング制御部は、基準信号に応じて第1、第2のスイッチング素子を双方とも非導通状態に維持するデッドタイム分の非活性期間を設けた第1、第2の活性化信号を出力するデッドタイム生成部と、目標デューティー比と実デューティー比とに基づいて基準信号を出力する補正制御部とを含む。
【0017】
好ましくは、電圧変換装置は、リアクトルの他方端と第3の電源ノードとの間に設けられる第3の電流制御部と、第2の電源ノードとリアクトルの他方端との間に設けられる第4の電流制御部とをさらに備える。電圧変換装置は、第1の電源ノードと第3の電源ノードとの間で電圧変換を行なう。
【0018】
この発明は、他の局面に従うと、上記いずれかに記載の電圧変換装置を備える車両である。
【0019】
この発明は、さらに他の局面に従うと、リアクトルと、リアクトルを通過するリアクトル電流を検出する電流検出部と、リアクトルの一方端と第1の電源ノードとの間に設けられ、第1の活性化信号に応じて導通する第1のスイッチング素子を少なくとも含む第1の電流制御部と、第1の電源ノードとは電位の異なる第2の電源ノードとリアクトルの一方端との間に設けられ、第1の整流素子を少なくとも含む第2の電流制御部とを含む電圧変換装置の制御方法であって、電圧指令値に基づいて目標デューティー比を算出するステップと、電流検出部の出力をモニタしてリアクトル電流の増加期間および減少期間を抽出し、増加期間および減少期間に基づいて実デューティー比を求める実デューティー比を算出するステップと、目標デューティー比と実デューティー比とに基づいて第1の活性化信号のデューティー比を決定するステップとを備える。
【発明の効果】
【0020】
本発明によれば、電圧変換装置の応答性が改善される。またこれにより、車両の走行性能が向上する。
【発明を実施するための最良の形態】
【0021】
以下、本発明の実施の形態について図面を参照しながら詳細に説明する。なお、図中同一または相当部分には同一符号を付してその説明は繰返さない。
【0022】
[車両の全体構成]
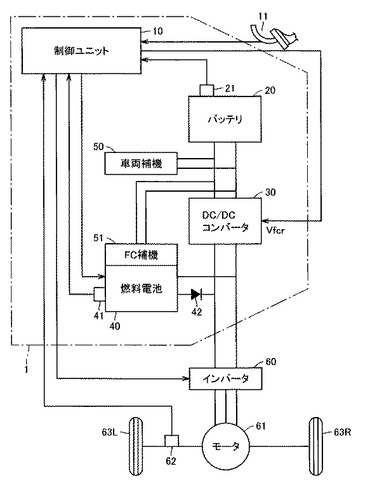
図1は、本発明の実施の形態に係る電圧変換器を搭載した車両の構成を示す説明図である。一例として、車両が燃料電池自動車である例が示されるが、これに限らず、電気自動車、ハイブリッド自動車にも本発明は適用可能である。
【0023】
図1を参照して、この車両は、車輪63L,63Rに連結された同期モータ61を駆動力源として走行する。同期モータ61の電源は、電源システム1である。電源システム1から出力される直流は、インバータ60で三相交流に変換され同期モータ61に供給される。同期モータ61は、制動時に発電機として機能することもできる。
【0024】
電源システム1は、燃料電池40、バッテリ20、DC/DCコンバータ30等から構成される。燃料電池40は、水素と酸素の電気化学反応によって発電する装置である。一例としては、固体高分子型の燃料電池を用いることができる。これに限らず、燃料電池40には、燐酸型、溶融炭酸塩型など種々のタイプの燃料電池を適用可能である。発電に利用される水素ガスは、アルコール等の原料を改質して生成される。本実施の形態では、発電を行なうスタック、燃料ガスを生成する改質器等を含めて燃料電池40と称する。なお、改質器に代えて、水素吸蔵合金、水素ボンベなどを利用して水素ガス自体を貯蔵する構成を採ることも可能である。
【0025】
バッテリ20は、充放電可能な二次電池であり、一例としては、ニッケル水素バッテリを用いることができる。その他、種々のタイプの二次電池を適用可能である。また、バッテリ20に代えて、二次電池以外の充放電可能な蓄電器、例えば電気二重層コンデンサ等の蓄電容量が大きなものを内蔵するキャパシタを用いても良い。
【0026】
燃料電池40とバッテリ20とはインバータ60に並列接続されている。燃料電池40からインバータ60への回路には、バッテリ20からの電流または同期モータ61で発電された電流が逆流するのを防止するためのダイオード42が設けられている。並列に接続された電源の電力を適切に使い分けるためには、両者の相対的な電圧差を制御する必要がある。本実施の形態では、この目的から、バッテリ20とインバータ60との間にDC/DCコンバータ30が設けられている。DC/DCコンバータ30は直流電圧同士を変換する電圧変換器である。DC/DCコンバータ30は、バッテリ20から入力されたDC電圧を調整してインバータ60側に出力する機能、燃料電池40またはモータ61から入力されたDC電圧を調整してバッテリ20に出力する機能を奏する。DC/DCコンバータ30の機能により、バッテリ20の充放電が実現される。
【0027】
バッテリ20とDC/DCコンバータ30との間には、車両補機50およびFC補機51が接続されている。つまり、バッテリ20は、これらの補機の電源となる。車両補機50とは、車両の運転時に使用される種々の電力機器を言い、照明機器、空調機器、油圧ポンプなどが含まれる。FC補機51とは、燃料電池40の運転に使用される種々の電力機器を言い、燃料ガスや改質原料を供給するためのポンプ、改質器の温度を調整するヒータ等が含まれる。
【0028】
上述した各要素の運転は、制御ユニット10によって制御される。制御ユニット10は、内部にCPU、RAM、ROMを備えたマイクロコンピュータとして構成されている。制御ユニット10は、インバータ60のスイッチングを制御して、要求動力に応じた三相交流を同期モータ61に出力する。要求動力に応じた電力が供給されるよう、燃料電池40およびDC/DCコンバータ30の運転を制御する。
【0029】
これらの制御を実現するために、制御ユニット10には、種々のセンサ信号が入力される。これらのセンサには、例えば、アクセルペダルセンサ11、バッテリ20の充電状態SOC(State Of Charge)を検出するSOCセンサ21、燃料電池40のガス流量を検出する流量センサ41、車速を検出する車速センサ62が含まれる。図示しないが、制御ユニット10には、その他種々のセンサが接続されている。
【0030】
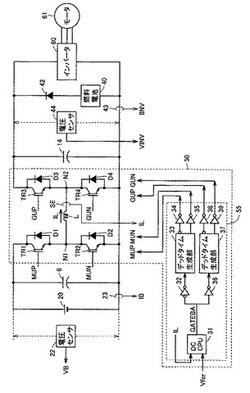
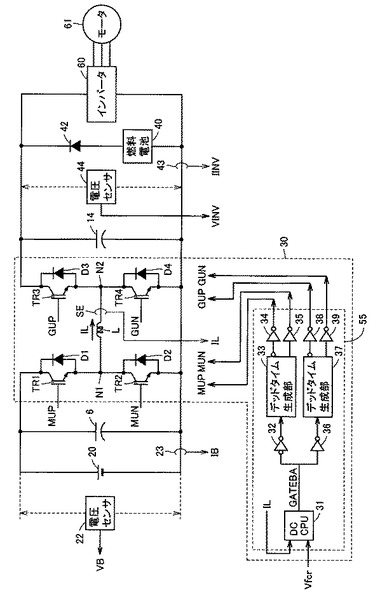
図2は、図1のDC/DCコンバータ30について詳細な構成を示した回路図である。なお、動作理解の容易のために、図2にはDC/DCコンバータ30の周辺部についても一部構成が示されている。
【0031】
図2を参照して、この車両には、バッテリ20と、バッテリ20の端子間に接続される平滑用コンデンサ6と、インバータ60と、インバータ60によって駆動されるモータ61と、インバータに直流電圧を供給する直列に接続されるダイオード42および燃料電池40と、インバータの電源端子間に接続される平滑用コンデンサ14とが設けられる。ダイオード42は、燃料電池40に電流が流入するのを防止するための保護素子である。
【0032】
この車両には、さらに、バッテリ20の電圧VBを検出する電圧センサ22と、バッテリ20に流れる電流IBを検出する電流センサ23と、インバータの電圧VINVを検出する電圧センサ44と、インバータ側に流れる電流IINVを検出する電流センサ43と、バッテリの電圧VBとインバータの電圧VINVとの間で相互に電圧変換を行なうDC/DCコンバータ30とが搭載されている。
【0033】
DC/DCコンバータ30は、バッテリ20の端子間に接続される第1のアームと、インバータ60の電源端子間に接続される第2のアームと、第1、第2のアーム間に接続されるリアクトルLとを含む。
【0034】
第1のアームは、バッテリ20の正極と負極との間に直列に接続されるIGBT素子TR1,TR2と、IGBT素子TR1と並列に接続されるダイオードD1と、IGBT素子TR2と並列に接続されるダイオードD2とを含む。
【0035】
IGBT素子TR1のコレクタはバッテリ20の正極に接続され、エミッタはノードN1に接続される。ダイオードD1はノードN1からバッテリ20の正極に向かう向きを順方向として接続される。
【0036】
IGBT素子TR2のコレクタはノードN1に接続され、エミッタはバッテリ20の負極に接続される。ダイオードD2はバッテリ20の負極からノードN1に向かう向きを順方向として接続される。
【0037】
第2のアームは、インバータの正負電源端子間に直列に接続されるIGBT素子TR3,TR4と、IGBT素子TR3と並列に接続されるダイオードD3と、IGBT素子TR4と並列に接続されるダイオードD4とを含む。
【0038】
IGBT素子TR3のコレクタはインバータ60の正電源端子に接続され、エミッタはノードN2に接続される。ダイオードD3はノードN2からインバータ60の正電源端子に向かう向きを順方向として接続される。
【0039】
IGBT素子TR4のコレクタはノードN2に接続され、エミッタはインバータ60の負電源端子に接続される。ダイオードD4はインバータ60の負電源端子からノードN2に向かう向きを順方向として接続される。
【0040】
リアクトルLは、ノードN1とノードN2との間に接続される。
バッテリ20の電圧VBと燃料電池40の出力電圧とは、取り得る範囲が一部重なっている。たとえばバッテリはニッケル水素バッテリなどが使用され、その電源電圧はたとえば200V〜300Vの範囲で変動するとする。一方、燃料電池40の出力電圧はたとえば240V〜400Vの範囲で変動するとする。したがってバッテリ20の電圧が燃料電池40の出力電圧よりも高い場合と低い場合とがあるので、DC/DCコンバータ30は先に説明したように第1、第2のアームを有するような構成となっている。この構成により、バッテリ20側からインバータ60側に昇圧および降圧が可能となり、かつインバータ60側からバッテリ20側に昇圧および降圧が可能となる。
【0041】
DC/DCコンバータ30は、さらに、TR1〜TR4に対する活性化信号MUP、MUN,GUP,GUNのデューティー比を決定するスイッチング制御部55を含む。スイッチング制御部55は、電圧指令値Vfcrに基づき算出した目標デューティー比とリアクトル電流の実デューティー比とに基づいて活性化信号のデューティー比を決定する。
【0042】
スイッチング制御部55は、DC−CPU31と、バッファ32と、反転バッファ34,35,36,38,39と、デッドタイム生成部33,37と、リアクトルLの電流値ILを検知する電流センサSEとを含む。
【0043】
DC−CPU31は、電圧指令値Vfcrおよび電流値ILに応じてコンバータのスイッチングデューティー比の基準となる信号GATEBAを出力する。信号GATEBAは、バッファ32によってデッドタイム生成部33に伝達される。デッドタイム生成部33は、出力信号の立ち上がりを遅延させて、相補な2つの出力信号の活性期間の間に2つの出力信号が双方とも不活性となるデッドタイムを設ける。
【0044】
デッドタイム生成部33の相補な出力信号は、それぞれ反転バッファ34,35に与えられる。反転バッファ34はIGBT素子TR1に対してゲート信号MUPを出力する。反転バッファ35はIGBT素子TR1に対してゲート信号MDNを出力する。
【0045】
また、信号GATEBAは、反転バッファ36によってデッドタイム生成部37に伝達される。デッドタイム生成部37は、入力信号の立ち上がり又は立下りを遅延させて、相補な2つの出力信号の活性期間と活性期間の間に、2つの出力信号が双方とも不活性となるデッドタイムを設ける。
【0046】
デッドタイム生成部37の相補な出力信号は、それぞれ反転バッファ38,39に与えられる。反転バッファ38はIGBT素子TR3に対してゲート信号GUPを出力する。反転バッファ39はIGBT素子TR4に対してゲート信号GUNを出力する。
【0047】
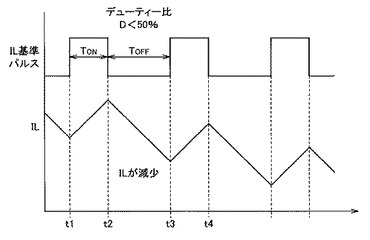
図3は、スイッチング素子のデューティー比が50%より小さい場合のリアクトルに流れる電流の変化を説明するための図である。
【0048】
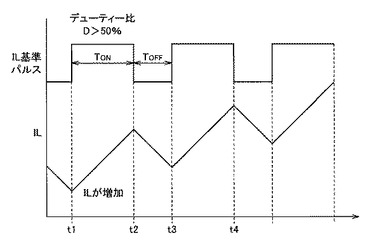
図4は、スイッチング素子のデューティー比が50%より大きい場合のリアクトルに流れる電流の変化を説明するための図である。
【0049】
ここで、デューティー比とは、スイッチング素子のオン時間をTon、オフ時間をToffとするとD=Ton/(Ton+Toff)で表される。
【0050】
また、リアクトル電流の傾きはΔI/Δt=V/Lで決まるが、図3、図4では理解の容易のためコンバータの入口側と出口側の電圧が等しい場合について、リアクトル電流ILを示している。
【0051】
図3に示すようにIL基準パルスのデューティー比D<50%の場合には、次第にリアクトル電流ILが減少していく。逆に図4に示すようにIL基準パルスのデューティー比D>50%の場合には、次第にリアクトル電流ILが増加していく。
【0052】
図2のバッテリ20からの放電時には、IGBT素子TR1,TR4がオン状態に制御されることによってリアクトルLにエネルギが蓄積される。続いてIGBT素子TR1,TR4がともにオフ状態に制御されるとリアクトルLに蓄積されたエネルギがダイオードD2→リアクトルL→ダイオードD3の電流経路で放出される。
【0053】
これによりバッテリ20から供給される電力によってインバータ60が駆動されモータ61が回転する。このときに同期して、ダイオードD2、D3における損失を減らすために、IGBT素子TR2,TR3を導通させて抵抗を減らしている。ただし、IGBT素子はスイッチング時にターンオフ遅れが生ずるので、ゲート制御信号にデッドタイムが設けられている。
【0054】
図2のDC−CPU31がPWM制御して発生する基準信号GATEBAに対して、IGBT素子のゲートを駆動するドライブ信号を作成する際に、素子のオン指令を遅らせるなどの構成を追加することで上下アームの短絡の危険性を回避している。この短絡防止のために設ける、上下アームのIGBT素子の両方がオフとなる期間をデッドタイムと呼んでいる。
【0055】
図示しないが、モータ61には車輪が減速機を介して接続されている。このようなバッテリ20からの放電は、燃料電池40からの電力だけでは必要なパワーに満たないような高パワー領域でモータ61を運転させる場合や、停車時や低負荷走行時など燃料電池40の効率が低い領域での運転を行なう場合に行なわれる。
【0056】
図2のバッテリ20への充電時には、IGBT素子TR2,TR3がオン状態に制御されることによってリアクトルLにエネルギが蓄積される。続いてIGBT素子TR2,TR3がともにオフ状態に制御されるとリアクトルLに蓄積されたエネルギがダイオードD4→リアクトルL→ダイオードD1の電流経路で放出される。
【0057】
このようにバッテリ20に対して充電が行なわれるのは、バッテリ20の充電状態(SOC)が低下している場合で燃料電池40の出力に余裕がある場合である。または、走行時に車両を制動させた場合においてモータ61が回生運転を行なうことにより電気エネルギを回収してバッテリ20に蓄積する場合である。
【0058】
この動作により、燃料電池40で発電された直流電力が供給され、または回生運転によりモータ61で発電された交流電力がインバータ60で直流電力に変換されて供給されてバッテリ20に対する充電が行なわれる。
【0059】
バッテリ20への充電時にも、上下アームの短絡を防止するためにデッドタイムが設けられている。
【0060】
[デッドタイムの説明]
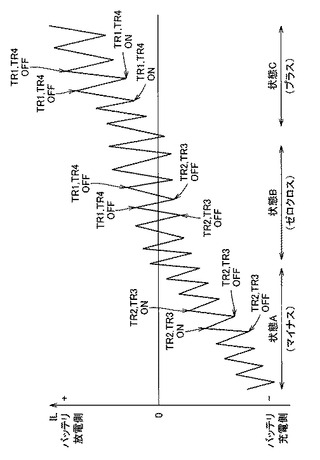
図5は、リアクトル電流が3状態に分類されることを説明するための波形図である。
【0061】
図5を参照して、状態Aは、スイッチングの1サイクルにおいてリアクトル電流ILが常に負(マイナス)である状態である。このとき、リアクトル電流の向きは、図2においてリアクトル電流ILの矢印で示した向きを正とした。つまり、状態Aは、バッテリ20に燃料電池40またはインバータ60から充電が行なわれている状態である。
【0062】
状態Cは、スイッチングの1サイクルにおいてリアクトル電流ILが常に正(プラス)である状態である。つまり、状態Cは、バッテリ20からインバータ60に放電が行なわれている状態である。
【0063】
状態Bは、スイッチングの1サイクルにおいてリアクトル電流ILの最大値Imaxが正で、最小値Iminが負である状態であり、リアクトル電流がゼロを横切って変化する(ゼロクロス)状態である。つまり状態Bは、バッテリ20に充電される電流とバッテリ20から放電される電流とがほぼ拮抗している状態である。
【0064】
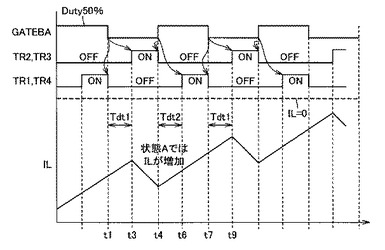
図6は、図5の状態Aにおける基準信号GATEBAとリアクトル電流の変化との関係を示した動作波形図である。
【0065】
図2、図6を参照して、DC−CPU31から出力された基準信号GATEBAは、デッドタイム生成部33,37によってデッドタイムが付加された結果、IGBT素子TR1〜TR4を図6の波形図に示すようにON・OFFさせる。
【0066】
すなわち、時刻t1の基準信号GATEBAの立下りに応じてIGBT素子TR1,TR4がオン状態からオフ状態に非活性化され、デッドタイムTdt1が経過した後の時刻t3においてIGBT素子TR2,TR3がオフ状態からオン状態に活性化される。
【0067】
続いて、時刻t4の基準信号GATEBAの立上りに応じてIGBT素子TR2,TR3がオン状態からオフ状態に非活性化され、デッドタイムTdt2が経過した後の時刻t6においてIGBT素子TR1,TR4がオフ状態からオン状態に活性化される。
【0068】
ここで、IGBT素子TR1〜TR4には、それぞれダイオードD1〜D4が並列接続されている。したがって、デッドタイムにおいてもダイオードの順方向には電流が流れうる。
【0069】
状態Aにおいては、リアクトル電流ILが負すなわち図2のノードN2からノードN1に向けて流れている。したがってIGBT素子TR1〜TR4がすべてオフ状態であるデッドタイム時には、ダイオードD1、D4が導通する。
【0070】
つまり時刻t6〜t7のIGBT素子TR1,TR4が導通している時間にデッドタイムTdt1,Tdt2を加えた時間、つまり時刻t4〜t9の間は1サイクルにおいてリアクトル電流ILが増加し、1サイクル中リアクトル電流が減少する時間は時刻t3〜t4のIGBT素子TR2,TR3が導通している時間のみとなる。
【0071】
したがって、仮に、基準信号GATEBAのデューティー比が50%であるとすると、状態Aでは、次第にリアクトル電流ILが増加していく傾向となる。
【0072】
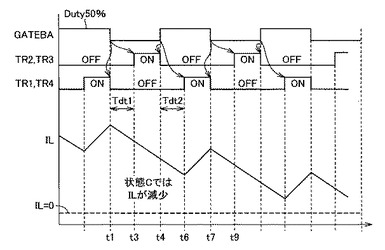
図7は、図5の状態Cにおける基準信号GATEBAとリアクトル電流の変化との関係を示した動作波形図である。
【0073】
図7の基準信号GATABAとIGBT素子TR1〜TR4のオン/オフ状態については、図6の場合と同様であるので説明は繰返さない。
【0074】
図2、図7を参照して、状態Cにおいては、リアクトル電流ILが正すなわち図2のノードN1からノードN2に向けて流れている。したがってIGBT素子TR1〜TR4がすべてオフ状態であるデッドタイム時には、ダイオードD2、D3が導通する。
【0075】
つまり時刻t3〜t4のIGBT素子TR2,TR3が導通している時間にデッドタイムTdt1,Tdt2を加えた時間、つまり時刻t1〜t6の間は1サイクルにおいてリアクトル電流ILが減少し、1サイクル中リアクトル電流が増加する時間は時刻t6〜t7のIGBT素子TR1,TR4が導通している時間のみとなる。
【0076】
したがって、仮に、基準信号GATEBAのデューティー比が50%であるとすると、状態Cでは、次第にリアクトル電流ILが減少していく傾向となる。
【0077】
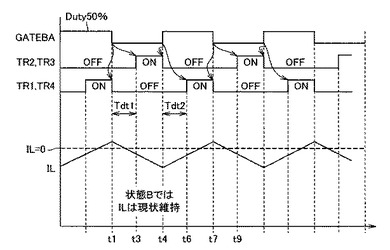
図8は、図5の状態Bにおける基準信号GATEBAとリアクトル電流の変化との関係を示した動作波形図である。
【0078】
図8の基準信号GATABAとIGBT素子TR1〜TR4のオン/オフ状態については、図6の場合と同様であるので説明は繰返さない。
【0079】
図2、図8を参照して、状態Bにおいては、リアクトル電流ILが正すなわち図2のノードN1からノードN2に向けて流れている期間と、リアクトル電流ILが負すなわち図2のノードN2からノードN1に向けて流れている期間とが繰返される。
【0080】
この場合は、時刻t3〜t4のIGBT素子TR2,TR3が導通している時間にデッドタイムTdt1を加えた時間、つまり時刻t1〜t4の間は1サイクルにおいてリアクトル電流ILが減少し、時刻t6〜t7のIGBT素子TR1,TR4が導通している時間にデッドタイムTdt2を加えた時間、つまり時刻t4〜t7の間は1サイクルにおいてリアクトル電流ILが増加する。
【0081】
したがって、仮に、基準信号GATEBAのデューティー比が50%であるとすると、デッドタイムTdt1,Tdt2が等しければ、状態Bでは、リアクトル電流ILは現状を維持する傾向となる。
【0082】
以上図6〜図8で説明したように、基準信号GATEBAのデューティー比と実際にリアクトルで電流の増加減少が行なわれるデューティーとは、リアクトルの電流状態で異なる。
【0083】
したがって、精度よく制御を行なうためにはリアクトルの電流状態に応じて、基準信号GATEBAのデューティー比を補正してやる必要がある。
【0084】
つまり、状態Aでは目標よりも基準信号GATEBAのデューティー比を小さく補正する必要があり、状態Cでは目標よりも基準信号GATEBAのデューティー比を大きく補正する必要がある。
【0085】
[デューティー比の補正処理]
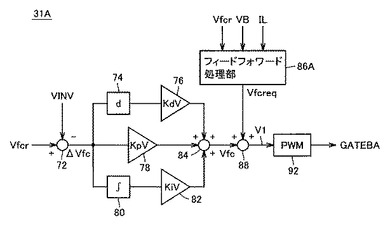
図9は、実施の形態において、図2に示したDC−CPU31の一例であるDC−CPU31Aの構成を示したブロック図である。
【0086】
図9を参照して、DC−CPU31Aは、指令電圧値Vfcrとインバータ電圧値VINVとの偏差ΔVfcを演算する演算部72と、偏差ΔVfcの微分処理を行なう処理部74と、処理部74の出力に微分項ゲインKdVを掛ける演算部76と、偏差ΔVfcの積分処理を行なう処理部80と、処理部80の出力に積分項ゲインKiVを掛ける演算部82と、偏差ΔVfcに比例項KpVを掛ける演算部78と、演算部76,78,82の出力の和を演算する演算部84とを含む。演算部84は和信号Vfcを出力する。
【0087】
DC−CPU31Aは、さらに、電圧値Vfcreqを出力するフィードフォワード処理部86Aを含む。フィードフォワード処理部86Aは、指令電圧値Vfcrとバッテリ電圧値VBとを受けてVfcr/(VB+Vfcr)を演算し、目標デューティー比を算出する。また、電流センサSEの出力するリアクトル電流値ILを高速にサンプリングし、リアクトル電流の増加期間(Ton)、減少期間(Toff)を抽出し、これらから実デューティー比D=Ton/(Ton+Toff)を算出する。フィードフォワード処理部86Aは、実デューティー比を目標デューティー比に一致させる方向に補正を行なう。
【0088】
たとえば、実デューティー比の誤差を1%以内に収めたいときは、リアクトル電流値のサンプリング数を1周期(Ton+Toff)の間に100サンプル以上行なう必要がある。このように、実デューティー比の必要な精度に合わせて高速にサンプリングすることで、従来の平均値や推定値を用いたデューティー比の補正よりも精度の高い補正が指令値の変化直後から可能であり、要素72〜74のPID処理のみで補正を行なうよりも応答性を高めることができる。
【0089】
DC−CPU31Aは、さらに、電圧値Vfcと電圧値Vfcreqとを加算して電圧値V1を出力する加算処理部88と、電圧値V1を受けて基準信号GATABAを出力するPWM処理部92とを含む。
【0090】
PWM処理部92は、加算処理部88で加算された結果の電圧値V1に対応するスイッチング基準タイミングを示す信号GATEBAを図2のバッファ32および反転バッファ36に出力する。
【0091】
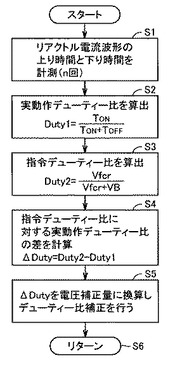
図10は、DC−CPU31Aのフィードフォワード処理部86Aで行なわれる処理を示したフローチャートである。この処理は、制御のメインルーチンから所定時間毎または所定の条件が成立する毎に呼び出されて実行される。
【0092】
図10を参照して、処理が開始されると、まずステップS1において、フィードフォワード処理部86Aは、図2の電流センサSEで検出されたリアクトル電流の波形の上り時間(増加期間、図3、図4のTon)と下り時間(減少期間、図3、図4のToff)を計測する。
【0093】
上り時間、下り時間の計測は、例えば次のように行なわれる。まずスイッチング周期の100分の1程度のサンプリング周期でリアクトル電流の測定値ILを高速にサンプリングする。各サンプリング時において、前回のサンプリング時の測定値との差分が正であるか負であるかによってリアクトル電流の増加減少を判断する。そしてリアクトル電流が減少から増加に転じた時点から、増加から減少に転じた時点までの時間が上り時間(Ton)である。また、リアクトル電流が増加から減少に転じた時点から、減少から増加に転じた時点までの時間が下り時間(Toff)である。この期間の計測は、例えばn回実行されて平均値が使用される。
【0094】
続いて、ステップS2において、実動作デューティー比を算出する。実動作デューティー比は、リアクトル電流の電流の向きが切り替わる点を正確に反映させたデューティー比である。
【0095】
つまり、図2でDCCPU31が出力する基準信号GATEBAは、デッドタイム生成部33,37の付加するデッドタイムの影響を受ける。デッドタイム生成部33,37から出力されたゲート信号MUP,MDN,GUP,GUNは、IGBT素子TR1〜TR4のターンオン、ターンオフ遅れの影響を受ける。実際には、さらに、IGBT素子TR1〜TR4がオフ期間であってもダイオードD1〜D4によってリアクトルに流れる電流が維持される場合もある。これらのさまざまな影響を受けた後に、リアクトル電流の増減の切り替わりが定まり、図3、図4で示される上り時間Ton、下り時間Toffが定まる。
【0096】
上り時間Ton、下り時間Toffから、次式(1)に基づいて実動作デューティー比Duty1を求める。
【0097】
Duty1=Ton/(Ton+Toff) ・・・(1)
続いて、ステップS3において、電圧指令値Vfcrとバッテリ電圧VBから、次式(1)に基づいて指令(目標)デューティー比Duty2を求める。
【0098】
Duty2=Vfcr/(Vfcr+VB) ・・・(2)
さらに、ステップS4において、指令デューティー比に対する実動作デューティー比の差ΔDutyを計算する。
【0099】
ΔDuty=Duty2−Duty1 ・・・(3)
ΔDutyが求まったら、ステップS5においてこれを電圧補正量に換算して補正した電圧Vfcreqを出力する。電圧Vfcreqは、図9の加算処理部88で電圧偏差からのフィードバック項Vfcと加算される。そして、加算処理部88はPWM処理部92に電圧V1を出力し、その結果信号GATEBAのデューティー比が補正される。
【0100】
デューティー比の補正が終了すると、ステップS6に処理が進み、制御はメインルーチンに移される。
【0101】
以上説明したように、フィードフォワード処理部86Aは、電圧指令値Vfcrとバッテリ電圧VBとの差で定まる目標デューティー比と、上り時間Ton、下り時間Toffを用いて求めた実動作デューティー比との差をゼロに近づけるようにフィードフォワード処理を行なう。
【0102】
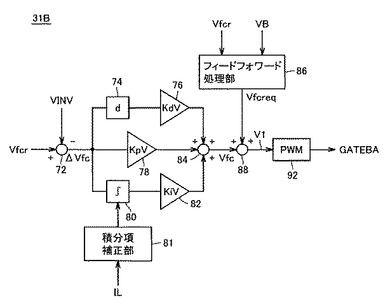
図11は、図2に示したDC−CPU31の他の一例であるDC−CPU31Bの構成を示したブロック図である。
【0103】
図11を参照して、DC−CPU31Bは、図9に示したDC−CPU31Aの構成において、フィードフォワード処理部86Aに代えてフィードフォワード処理部86を含み、さらに積分項補正部81を含む。他の部分の構成については、図9で説明したフィードフォワード処理部86Aと同様であるので、説明は繰返さない。
【0104】
フィードフォワード処理部86は、電圧指令値Vfcrとバッテリ電圧VBから、式(2)に基づいて指令(目標)デューティー比Duty2を求める。
【0105】
Duty2=Vfcr/(Vfcr+VB) ・・・(2)
しかし、この目標デューティー比は、デッドタイム等のずれが考慮されていない値である。そして、通常デッドタイム分の補正のような定常的な偏差は、積分処理を行なう処理部80に蓄積される。
【0106】
そして、積分項補正部81は、リアクトル電流ILの波形を直接観測してリアクトル電流ILが増加していく時間Tonと減少している時間Toffとを求め、これらから実動作デューティー比を求める。
【0107】
そして、目標デューティー比と実動作デューティー比との差に相当する積分項を演算して処理部80に代入する。
【0108】
このようにすることにより、応答性がよくかつ精度の高い電圧制御が可能となる。
以上の説明を踏まえて、最後に、主として図2を参照して本実施の形態について総括的に再度説明をする。本実施の形態において、電圧変換装置(30)は、リアクトルLと、リアクトルLを通過するリアクトル電流を検出する電流検出部(SE)と、リアクトルLの一方端(N1)と第1の電源ノードとの間に設けられ、第1の活性化信号(MUP)に応じて導通する第1のスイッチング素子(TR1)を少なくとも含む第1の電流制御部と、第1の電源ノードとは電位の異なる第2の電源ノードとリアクトルの一方端(N1)との間に設けられ、第1の整流素子(D2)を少なくとも含む第2の電流制御部と、第1の活性化信号(MUP)のデューティー比を決定するスイッチング制御部(55)とを備える。スイッチング制御部(55)は、電圧指令値(Vfcr)に基づき算出した目標デューティー比とリアクトル電流の実デューティー比とに基づいて第1の活性化信号のデューティー比を決定する。スイッチング制御部(55)は、電流検出部(SE)の出力をモニタしてリアクトル電流の増加期間および減少期間を抽出し、増加期間および減少期間に基づいて実デューティー比を求める。
【0109】
好ましくは、スイッチング制御部(55)は、図9に示すように、第1の電源ノードの電圧(VB)と電圧指令値(Vfcr)とに基づいてフィードフォワード項を算出し、フィードフォワード項に対して実デューティー比に応じた補正を行なう、フィードフォワード処理部(86A)を含む。
【0110】
好ましくは、スイッチング制御部(55)は、目標デューティー比に対して電圧指令値(Vfcr)と出力電圧値(VINV)との偏差(ΔVfc)に基づくフィードバック制御を用いた補正を実行する。図11に示したように、フィードバック制御は、積分制御を含む。スイッチング制御部(55)は、積分制御の積分項が蓄積される積分処理部(80)と、電流検出部(SE)の出力を受けて実デューティー比を求め、積分処理部(80)に対して目標デューティー比と実デューティー比とのずれに応じた補正値を出力する積分項補正部(81)とを含む。
【0111】
好ましくは、第1の電流制御部は、第1のスイッチング素子と並列にリアクトルの一方端と第1の電源ノードとの間に設けられる第2の整流素子(D1)をさらに含む。第2の電流制御部は、第1の整流素子(D2)と並列にリアクトルの一方端と第2の電源ノードとの間に設けられる第2のスイッチング素子(TR2)をさらに含む。
【0112】
より好ましくは、第2のスイッチング素子(TR2)は、第2の活性化信号(MUN)に応じて導通する。スイッチング制御部(55)は、基準信号GATEBAに応じて第1、第2のスイッチング素子(TR1,TR2)を双方とも非導通状態に維持するデッドタイム分の非活性期間を設けた第1、第2の活性化信号を出力するデッドタイム生成部(33)と、目標デューティー比と実デューティー比とに基づいて基準信号を出力する補正制御部(31)とを含む。
【0113】
好ましくは、電圧変換装置(30)は、リアクトルの他方端(N2)と第3の電源ノードとの間に設けられる第3の電流制御部(TR3およびD3)と、第2の電源ノードとリアクトルの他方端(N2)との間に設けられる第4の電流制御部(TR4およびD4)とをさらに備える。電圧変換装置(30)は、第1の電源ノードと第3の電源ノードとの間で電圧変換を行なう。
【0114】
他の局面では、図9および図10に示すように、本実施の形態に係る発明は、リアクトルLと、リアクトルLを通過するリアクトル電流を検出する電流検出部(SE)と、リアクトルLの一方端(N1)と第1の電源ノードとの間に設けられ、第1の活性化信号(MUP)に応じて導通する第1のスイッチング素子(TR1)を少なくとも含む第1の電流制御部と、第1の電源ノードとは電位の異なる第2の電源ノードとリアクトルの一方端(N1)との間に設けられ、第1の整流素子(D2)を少なくとも含む第2の電流制御部とを含む電圧変換装置(30)の制御方法であって、電圧指令値(Vfcr)に基づいて目標デューティー比(Duty2)を算出するステップ(S3)と、電流検出部(SE)の出力をモニタしてリアクトル電流の増加期間(Ton)および減少期間(Toff)を抽出し、増加期間および減少期間に基づいて実デューティー比を求める実デューティー比を算出するステップ(S2)と、目標デューティー比と実デューティー比とに基づいて第1の活性化信号のデューティー比を決定するステップ(S5)とを備える。
【0115】
本実施の形態によれば、電圧変換装置の応答性を向上させるとともに、実際の電流値の波形から求めた実デューティー比を目標値に合わせるように補正するので、部品特性のばらつきや経年変化に適切に対応した精度の良い制御が可能となり、燃料電池自動車等において車両の制御性が向上する。
【0116】
今回開示された実施の形態はすべての点で例示であって制限的なものではないと考えられるべきである。本発明の範囲は上記した説明ではなくて特許請求の範囲によって示され、特許請求の範囲と均等の意味および範囲内でのすべての変更が含まれることが意図される。
【図面の簡単な説明】
【0117】
【図1】本発明の実施の形態に係る電圧変換器を搭載した車両の構成を示す説明図である。
【図2】図1のDC/DCコンバータ30について詳細な構成を示した回路図である。
【図3】スイッチング素子のデューティー比が50%より小さい場合のリアクトルに流れる電流の変化を説明するための図である。
【図4】スイッチング素子のデューティー比が50%より大きい場合のリアクトルに流れる電流の変化を説明するための図である。
【図5】リアクトル電流が3状態に分類されることを説明するための波形図である。
【図6】図5の状態Aにおける基準信号GATEBAとリアクトル電流の変化との関係を示した動作波形図である。
【図7】図5の状態Cにおける基準信号GATEBAとリアクトル電流の変化との関係を示した動作波形図である。
【図8】図5の状態Bにおける基準信号GATEBAとリアクトル電流の変化との関係を示した動作波形図である。
【図9】実施の形態において、図2に示したDC−CPU31の一例であるDC−CPU31Aの構成を示したブロック図である。
【図10】DC−CPU31Aのフィードフォワード処理部86Aで行なわれる処理を示したフローチャートである。
【図11】図2に示したDC−CPU31の他の一例であるDC−CPU31Bの構成を示したブロック図である。
【符号の説明】
【0118】
1 電源システム、6,14 平滑用コンデンサ、10 制御ユニット、11 アクセルペダルセンサ、20 バッテリ、21 SOCセンサ、22,44 電圧センサ、23,43 電流センサ、30 DC/DCコンバータ、32 バッファ、33,37 デッドタイム生成部、34,35,36,38,39 反転バッファ、40 燃料電池、41 流量センサ、42 ダイオード、50 車両補機、51 FC補機、55 スイッチング制御部、60 インバータ、61 モータ、62 車速センサ、63L,63R 車輪、72,76,78,82,84 演算部、74,80,92 処理部、81 積分項補正部、86,86A フィードフォワード処理部、88 加算処理部、D1〜D4 ダイオード、L リアクトル、SE 電流センサ、TR1〜TR4 IGBT素子。
【技術分野】
【0001】
この発明は、電圧変換装置、車両および電圧変換装置の制御方法に関し、特に2つの電圧系の間に設置され双方向に電流供給が可能な電圧変換装置とそれを備える車両および電圧変換装置に関する。
【背景技術】
【0002】
特開2003−250276号公報(特許文献1)には、出力電流値、出力電圧値などから、リアクトル電流を推定し、推定したリアクトル電流のパターンに基づいてデッドタイムを補正するPWM(パルス幅変調)インバータが開示されている。
【特許文献1】特開2003−250276号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
インバータや電圧コンバータでは、電圧指令値(目標電圧)と入力電圧の差に応じて内部素子の制御を行なうフィードフォワード制御と、電圧指令値と出力電圧の差に応じて内部素子の制御を行なうフィードバック制御とを組み合わせて用いる場合がある。フィードバック制御では、PID(比例積分微分)制御などが用いられる場合が多い。
【0004】
近年、電気自動車、ハイブリッド自動車および燃料電池自動車等のように、車両推進用の駆動源として交流式モータを採用し、この交流式モータを駆動するインバータ装置を搭載する自動車が登場している。
【0005】
このような車両では、車両推進用モータを駆動するための高電圧バッテリと低電圧の補機用バッテリなどの、2つ以上の異なる電圧のバッテリを搭載するケースがある。
【0006】
また、燃料電池を搭載する自動車では、稼動開始から安定出力にいたるまで燃料電池の出力電圧が変動する。このため駆動用の電力を安定的に確保するには燃料電池と二次電池とを組み合わせ、電圧変換器で接続して使用することが検討されている。
【0007】
車両状態に応じて燃料電池の出力電圧も二次電池の出力電圧も変動するので、この間に接続される電圧変換器は、車両に必要とされるパワーに応じて、二次電池側から燃料電池側に電流を供給したり、逆に燃料電池側から二次電池に充電したりする動作を行なう。
【0008】
このため、車両の加速、道路の傾斜等に応じて必要な電圧を速やかに出力できる応答性の良い電圧変換器が要求される。
【0009】
しかしながら、リアクトルを含むインバータや電圧コンバータにおいて、リアクトル電流に基づいてデッドタイムを補正する技術は知られているが、ここで用いられるリアクトル電流は、たとえば所定の演算式で得られる推定値やローパスフィルタを通過させて得られる電流平均値であった。推定値や平均値に基づいて補正を行なうのでは、リアクトル電流の電流の向きが切り替わる点を正確に反映させた実デューティー比とのずれが生じてしまい、正確な補正ができない。
【0010】
部品特性のバラツキや経年変化によってこのずれが拡大し、補正値が最適でなくなる場合もありうる。すると、結果的に電圧変換器の応答性が悪化することになる。
【0011】
この発明の目的は、応答性が改善された電圧変換装置およびそれを搭載する車両を提供することである。
【課題を解決するための手段】
【0012】
この発明は、要約すると、電圧変換装置であって、リアクトルと、リアクトルを通過するリアクトル電流を検出する電流検出部と、リアクトルの一方端と第1の電源ノードとの間に設けられ、第1の活性化信号に応じて導通する第1のスイッチング素子を少なくとも含む第1の電流制御部と、第1の電源ノードとは電位の異なる第2の電源ノードとリアクトルの一方端との間に設けられ、第1の整流素子を少なくとも含む第2の電流制御部と、第1の活性化信号のデューティー比を決定するスイッチング制御部とを備える。スイッチング制御部は、電圧指令値に基づき算出した目標デューティー比とリアクトル電流の実デューティー比とに基づいて第1の活性化信号のデューティー比を決定する。スイッチング制御部は、電流検出部の出力をモニタしてリアクトル電流の増加期間および減少期間を抽出し、増加期間および減少期間に基づいて実デューティー比を求める。
【0013】
好ましくは、スイッチング制御部は、第1の電源ノードの電圧と電圧指令値とに基づいてフィードフォワード項を算出し、フィードフォワード項に対して実デューティー比に応じた補正を行なうフィードフォワード処理部を含む。
【0014】
好ましくは、スイッチング制御部は、目標デューティー比に対して電圧指令値と出力電圧値との偏差に基づくフィードバック制御を用いた補正を実行する。フィードバック制御は、積分制御を含む。スイッチング制御部は、積分制御の積分項が蓄積される積分処理部と、電流検出部の出力を受けて実デューティー比を求め、積分処理部に対して目標デューティー比と実デューティー比とのずれに応じた補正値を出力する積分項補正部とを含む。
【0015】
好ましくは、第1の電流制御部は、第1のスイッチング素子と並列にリアクトルの一方端と第1の電源ノードとの間に設けられる第2の整流素子をさらに含む。第2の電流制御部は、第1の整流素子と並列にリアクトルの一方端と第2の電源ノードとの間に設けられる第2のスイッチング素子をさらに含む。
【0016】
より好ましくは、第2のスイッチング素子は、第2の活性化信号に応じて導通する。スイッチング制御部は、基準信号に応じて第1、第2のスイッチング素子を双方とも非導通状態に維持するデッドタイム分の非活性期間を設けた第1、第2の活性化信号を出力するデッドタイム生成部と、目標デューティー比と実デューティー比とに基づいて基準信号を出力する補正制御部とを含む。
【0017】
好ましくは、電圧変換装置は、リアクトルの他方端と第3の電源ノードとの間に設けられる第3の電流制御部と、第2の電源ノードとリアクトルの他方端との間に設けられる第4の電流制御部とをさらに備える。電圧変換装置は、第1の電源ノードと第3の電源ノードとの間で電圧変換を行なう。
【0018】
この発明は、他の局面に従うと、上記いずれかに記載の電圧変換装置を備える車両である。
【0019】
この発明は、さらに他の局面に従うと、リアクトルと、リアクトルを通過するリアクトル電流を検出する電流検出部と、リアクトルの一方端と第1の電源ノードとの間に設けられ、第1の活性化信号に応じて導通する第1のスイッチング素子を少なくとも含む第1の電流制御部と、第1の電源ノードとは電位の異なる第2の電源ノードとリアクトルの一方端との間に設けられ、第1の整流素子を少なくとも含む第2の電流制御部とを含む電圧変換装置の制御方法であって、電圧指令値に基づいて目標デューティー比を算出するステップと、電流検出部の出力をモニタしてリアクトル電流の増加期間および減少期間を抽出し、増加期間および減少期間に基づいて実デューティー比を求める実デューティー比を算出するステップと、目標デューティー比と実デューティー比とに基づいて第1の活性化信号のデューティー比を決定するステップとを備える。
【発明の効果】
【0020】
本発明によれば、電圧変換装置の応答性が改善される。またこれにより、車両の走行性能が向上する。
【発明を実施するための最良の形態】
【0021】
以下、本発明の実施の形態について図面を参照しながら詳細に説明する。なお、図中同一または相当部分には同一符号を付してその説明は繰返さない。
【0022】
[車両の全体構成]
図1は、本発明の実施の形態に係る電圧変換器を搭載した車両の構成を示す説明図である。一例として、車両が燃料電池自動車である例が示されるが、これに限らず、電気自動車、ハイブリッド自動車にも本発明は適用可能である。
【0023】
図1を参照して、この車両は、車輪63L,63Rに連結された同期モータ61を駆動力源として走行する。同期モータ61の電源は、電源システム1である。電源システム1から出力される直流は、インバータ60で三相交流に変換され同期モータ61に供給される。同期モータ61は、制動時に発電機として機能することもできる。
【0024】
電源システム1は、燃料電池40、バッテリ20、DC/DCコンバータ30等から構成される。燃料電池40は、水素と酸素の電気化学反応によって発電する装置である。一例としては、固体高分子型の燃料電池を用いることができる。これに限らず、燃料電池40には、燐酸型、溶融炭酸塩型など種々のタイプの燃料電池を適用可能である。発電に利用される水素ガスは、アルコール等の原料を改質して生成される。本実施の形態では、発電を行なうスタック、燃料ガスを生成する改質器等を含めて燃料電池40と称する。なお、改質器に代えて、水素吸蔵合金、水素ボンベなどを利用して水素ガス自体を貯蔵する構成を採ることも可能である。
【0025】
バッテリ20は、充放電可能な二次電池であり、一例としては、ニッケル水素バッテリを用いることができる。その他、種々のタイプの二次電池を適用可能である。また、バッテリ20に代えて、二次電池以外の充放電可能な蓄電器、例えば電気二重層コンデンサ等の蓄電容量が大きなものを内蔵するキャパシタを用いても良い。
【0026】
燃料電池40とバッテリ20とはインバータ60に並列接続されている。燃料電池40からインバータ60への回路には、バッテリ20からの電流または同期モータ61で発電された電流が逆流するのを防止するためのダイオード42が設けられている。並列に接続された電源の電力を適切に使い分けるためには、両者の相対的な電圧差を制御する必要がある。本実施の形態では、この目的から、バッテリ20とインバータ60との間にDC/DCコンバータ30が設けられている。DC/DCコンバータ30は直流電圧同士を変換する電圧変換器である。DC/DCコンバータ30は、バッテリ20から入力されたDC電圧を調整してインバータ60側に出力する機能、燃料電池40またはモータ61から入力されたDC電圧を調整してバッテリ20に出力する機能を奏する。DC/DCコンバータ30の機能により、バッテリ20の充放電が実現される。
【0027】
バッテリ20とDC/DCコンバータ30との間には、車両補機50およびFC補機51が接続されている。つまり、バッテリ20は、これらの補機の電源となる。車両補機50とは、車両の運転時に使用される種々の電力機器を言い、照明機器、空調機器、油圧ポンプなどが含まれる。FC補機51とは、燃料電池40の運転に使用される種々の電力機器を言い、燃料ガスや改質原料を供給するためのポンプ、改質器の温度を調整するヒータ等が含まれる。
【0028】
上述した各要素の運転は、制御ユニット10によって制御される。制御ユニット10は、内部にCPU、RAM、ROMを備えたマイクロコンピュータとして構成されている。制御ユニット10は、インバータ60のスイッチングを制御して、要求動力に応じた三相交流を同期モータ61に出力する。要求動力に応じた電力が供給されるよう、燃料電池40およびDC/DCコンバータ30の運転を制御する。
【0029】
これらの制御を実現するために、制御ユニット10には、種々のセンサ信号が入力される。これらのセンサには、例えば、アクセルペダルセンサ11、バッテリ20の充電状態SOC(State Of Charge)を検出するSOCセンサ21、燃料電池40のガス流量を検出する流量センサ41、車速を検出する車速センサ62が含まれる。図示しないが、制御ユニット10には、その他種々のセンサが接続されている。
【0030】
図2は、図1のDC/DCコンバータ30について詳細な構成を示した回路図である。なお、動作理解の容易のために、図2にはDC/DCコンバータ30の周辺部についても一部構成が示されている。
【0031】
図2を参照して、この車両には、バッテリ20と、バッテリ20の端子間に接続される平滑用コンデンサ6と、インバータ60と、インバータ60によって駆動されるモータ61と、インバータに直流電圧を供給する直列に接続されるダイオード42および燃料電池40と、インバータの電源端子間に接続される平滑用コンデンサ14とが設けられる。ダイオード42は、燃料電池40に電流が流入するのを防止するための保護素子である。
【0032】
この車両には、さらに、バッテリ20の電圧VBを検出する電圧センサ22と、バッテリ20に流れる電流IBを検出する電流センサ23と、インバータの電圧VINVを検出する電圧センサ44と、インバータ側に流れる電流IINVを検出する電流センサ43と、バッテリの電圧VBとインバータの電圧VINVとの間で相互に電圧変換を行なうDC/DCコンバータ30とが搭載されている。
【0033】
DC/DCコンバータ30は、バッテリ20の端子間に接続される第1のアームと、インバータ60の電源端子間に接続される第2のアームと、第1、第2のアーム間に接続されるリアクトルLとを含む。
【0034】
第1のアームは、バッテリ20の正極と負極との間に直列に接続されるIGBT素子TR1,TR2と、IGBT素子TR1と並列に接続されるダイオードD1と、IGBT素子TR2と並列に接続されるダイオードD2とを含む。
【0035】
IGBT素子TR1のコレクタはバッテリ20の正極に接続され、エミッタはノードN1に接続される。ダイオードD1はノードN1からバッテリ20の正極に向かう向きを順方向として接続される。
【0036】
IGBT素子TR2のコレクタはノードN1に接続され、エミッタはバッテリ20の負極に接続される。ダイオードD2はバッテリ20の負極からノードN1に向かう向きを順方向として接続される。
【0037】
第2のアームは、インバータの正負電源端子間に直列に接続されるIGBT素子TR3,TR4と、IGBT素子TR3と並列に接続されるダイオードD3と、IGBT素子TR4と並列に接続されるダイオードD4とを含む。
【0038】
IGBT素子TR3のコレクタはインバータ60の正電源端子に接続され、エミッタはノードN2に接続される。ダイオードD3はノードN2からインバータ60の正電源端子に向かう向きを順方向として接続される。
【0039】
IGBT素子TR4のコレクタはノードN2に接続され、エミッタはインバータ60の負電源端子に接続される。ダイオードD4はインバータ60の負電源端子からノードN2に向かう向きを順方向として接続される。
【0040】
リアクトルLは、ノードN1とノードN2との間に接続される。
バッテリ20の電圧VBと燃料電池40の出力電圧とは、取り得る範囲が一部重なっている。たとえばバッテリはニッケル水素バッテリなどが使用され、その電源電圧はたとえば200V〜300Vの範囲で変動するとする。一方、燃料電池40の出力電圧はたとえば240V〜400Vの範囲で変動するとする。したがってバッテリ20の電圧が燃料電池40の出力電圧よりも高い場合と低い場合とがあるので、DC/DCコンバータ30は先に説明したように第1、第2のアームを有するような構成となっている。この構成により、バッテリ20側からインバータ60側に昇圧および降圧が可能となり、かつインバータ60側からバッテリ20側に昇圧および降圧が可能となる。
【0041】
DC/DCコンバータ30は、さらに、TR1〜TR4に対する活性化信号MUP、MUN,GUP,GUNのデューティー比を決定するスイッチング制御部55を含む。スイッチング制御部55は、電圧指令値Vfcrに基づき算出した目標デューティー比とリアクトル電流の実デューティー比とに基づいて活性化信号のデューティー比を決定する。
【0042】
スイッチング制御部55は、DC−CPU31と、バッファ32と、反転バッファ34,35,36,38,39と、デッドタイム生成部33,37と、リアクトルLの電流値ILを検知する電流センサSEとを含む。
【0043】
DC−CPU31は、電圧指令値Vfcrおよび電流値ILに応じてコンバータのスイッチングデューティー比の基準となる信号GATEBAを出力する。信号GATEBAは、バッファ32によってデッドタイム生成部33に伝達される。デッドタイム生成部33は、出力信号の立ち上がりを遅延させて、相補な2つの出力信号の活性期間の間に2つの出力信号が双方とも不活性となるデッドタイムを設ける。
【0044】
デッドタイム生成部33の相補な出力信号は、それぞれ反転バッファ34,35に与えられる。反転バッファ34はIGBT素子TR1に対してゲート信号MUPを出力する。反転バッファ35はIGBT素子TR1に対してゲート信号MDNを出力する。
【0045】
また、信号GATEBAは、反転バッファ36によってデッドタイム生成部37に伝達される。デッドタイム生成部37は、入力信号の立ち上がり又は立下りを遅延させて、相補な2つの出力信号の活性期間と活性期間の間に、2つの出力信号が双方とも不活性となるデッドタイムを設ける。
【0046】
デッドタイム生成部37の相補な出力信号は、それぞれ反転バッファ38,39に与えられる。反転バッファ38はIGBT素子TR3に対してゲート信号GUPを出力する。反転バッファ39はIGBT素子TR4に対してゲート信号GUNを出力する。
【0047】
図3は、スイッチング素子のデューティー比が50%より小さい場合のリアクトルに流れる電流の変化を説明するための図である。
【0048】
図4は、スイッチング素子のデューティー比が50%より大きい場合のリアクトルに流れる電流の変化を説明するための図である。
【0049】
ここで、デューティー比とは、スイッチング素子のオン時間をTon、オフ時間をToffとするとD=Ton/(Ton+Toff)で表される。
【0050】
また、リアクトル電流の傾きはΔI/Δt=V/Lで決まるが、図3、図4では理解の容易のためコンバータの入口側と出口側の電圧が等しい場合について、リアクトル電流ILを示している。
【0051】
図3に示すようにIL基準パルスのデューティー比D<50%の場合には、次第にリアクトル電流ILが減少していく。逆に図4に示すようにIL基準パルスのデューティー比D>50%の場合には、次第にリアクトル電流ILが増加していく。
【0052】
図2のバッテリ20からの放電時には、IGBT素子TR1,TR4がオン状態に制御されることによってリアクトルLにエネルギが蓄積される。続いてIGBT素子TR1,TR4がともにオフ状態に制御されるとリアクトルLに蓄積されたエネルギがダイオードD2→リアクトルL→ダイオードD3の電流経路で放出される。
【0053】
これによりバッテリ20から供給される電力によってインバータ60が駆動されモータ61が回転する。このときに同期して、ダイオードD2、D3における損失を減らすために、IGBT素子TR2,TR3を導通させて抵抗を減らしている。ただし、IGBT素子はスイッチング時にターンオフ遅れが生ずるので、ゲート制御信号にデッドタイムが設けられている。
【0054】
図2のDC−CPU31がPWM制御して発生する基準信号GATEBAに対して、IGBT素子のゲートを駆動するドライブ信号を作成する際に、素子のオン指令を遅らせるなどの構成を追加することで上下アームの短絡の危険性を回避している。この短絡防止のために設ける、上下アームのIGBT素子の両方がオフとなる期間をデッドタイムと呼んでいる。
【0055】
図示しないが、モータ61には車輪が減速機を介して接続されている。このようなバッテリ20からの放電は、燃料電池40からの電力だけでは必要なパワーに満たないような高パワー領域でモータ61を運転させる場合や、停車時や低負荷走行時など燃料電池40の効率が低い領域での運転を行なう場合に行なわれる。
【0056】
図2のバッテリ20への充電時には、IGBT素子TR2,TR3がオン状態に制御されることによってリアクトルLにエネルギが蓄積される。続いてIGBT素子TR2,TR3がともにオフ状態に制御されるとリアクトルLに蓄積されたエネルギがダイオードD4→リアクトルL→ダイオードD1の電流経路で放出される。
【0057】
このようにバッテリ20に対して充電が行なわれるのは、バッテリ20の充電状態(SOC)が低下している場合で燃料電池40の出力に余裕がある場合である。または、走行時に車両を制動させた場合においてモータ61が回生運転を行なうことにより電気エネルギを回収してバッテリ20に蓄積する場合である。
【0058】
この動作により、燃料電池40で発電された直流電力が供給され、または回生運転によりモータ61で発電された交流電力がインバータ60で直流電力に変換されて供給されてバッテリ20に対する充電が行なわれる。
【0059】
バッテリ20への充電時にも、上下アームの短絡を防止するためにデッドタイムが設けられている。
【0060】
[デッドタイムの説明]
図5は、リアクトル電流が3状態に分類されることを説明するための波形図である。
【0061】
図5を参照して、状態Aは、スイッチングの1サイクルにおいてリアクトル電流ILが常に負(マイナス)である状態である。このとき、リアクトル電流の向きは、図2においてリアクトル電流ILの矢印で示した向きを正とした。つまり、状態Aは、バッテリ20に燃料電池40またはインバータ60から充電が行なわれている状態である。
【0062】
状態Cは、スイッチングの1サイクルにおいてリアクトル電流ILが常に正(プラス)である状態である。つまり、状態Cは、バッテリ20からインバータ60に放電が行なわれている状態である。
【0063】
状態Bは、スイッチングの1サイクルにおいてリアクトル電流ILの最大値Imaxが正で、最小値Iminが負である状態であり、リアクトル電流がゼロを横切って変化する(ゼロクロス)状態である。つまり状態Bは、バッテリ20に充電される電流とバッテリ20から放電される電流とがほぼ拮抗している状態である。
【0064】
図6は、図5の状態Aにおける基準信号GATEBAとリアクトル電流の変化との関係を示した動作波形図である。
【0065】
図2、図6を参照して、DC−CPU31から出力された基準信号GATEBAは、デッドタイム生成部33,37によってデッドタイムが付加された結果、IGBT素子TR1〜TR4を図6の波形図に示すようにON・OFFさせる。
【0066】
すなわち、時刻t1の基準信号GATEBAの立下りに応じてIGBT素子TR1,TR4がオン状態からオフ状態に非活性化され、デッドタイムTdt1が経過した後の時刻t3においてIGBT素子TR2,TR3がオフ状態からオン状態に活性化される。
【0067】
続いて、時刻t4の基準信号GATEBAの立上りに応じてIGBT素子TR2,TR3がオン状態からオフ状態に非活性化され、デッドタイムTdt2が経過した後の時刻t6においてIGBT素子TR1,TR4がオフ状態からオン状態に活性化される。
【0068】
ここで、IGBT素子TR1〜TR4には、それぞれダイオードD1〜D4が並列接続されている。したがって、デッドタイムにおいてもダイオードの順方向には電流が流れうる。
【0069】
状態Aにおいては、リアクトル電流ILが負すなわち図2のノードN2からノードN1に向けて流れている。したがってIGBT素子TR1〜TR4がすべてオフ状態であるデッドタイム時には、ダイオードD1、D4が導通する。
【0070】
つまり時刻t6〜t7のIGBT素子TR1,TR4が導通している時間にデッドタイムTdt1,Tdt2を加えた時間、つまり時刻t4〜t9の間は1サイクルにおいてリアクトル電流ILが増加し、1サイクル中リアクトル電流が減少する時間は時刻t3〜t4のIGBT素子TR2,TR3が導通している時間のみとなる。
【0071】
したがって、仮に、基準信号GATEBAのデューティー比が50%であるとすると、状態Aでは、次第にリアクトル電流ILが増加していく傾向となる。
【0072】
図7は、図5の状態Cにおける基準信号GATEBAとリアクトル電流の変化との関係を示した動作波形図である。
【0073】
図7の基準信号GATABAとIGBT素子TR1〜TR4のオン/オフ状態については、図6の場合と同様であるので説明は繰返さない。
【0074】
図2、図7を参照して、状態Cにおいては、リアクトル電流ILが正すなわち図2のノードN1からノードN2に向けて流れている。したがってIGBT素子TR1〜TR4がすべてオフ状態であるデッドタイム時には、ダイオードD2、D3が導通する。
【0075】
つまり時刻t3〜t4のIGBT素子TR2,TR3が導通している時間にデッドタイムTdt1,Tdt2を加えた時間、つまり時刻t1〜t6の間は1サイクルにおいてリアクトル電流ILが減少し、1サイクル中リアクトル電流が増加する時間は時刻t6〜t7のIGBT素子TR1,TR4が導通している時間のみとなる。
【0076】
したがって、仮に、基準信号GATEBAのデューティー比が50%であるとすると、状態Cでは、次第にリアクトル電流ILが減少していく傾向となる。
【0077】
図8は、図5の状態Bにおける基準信号GATEBAとリアクトル電流の変化との関係を示した動作波形図である。
【0078】
図8の基準信号GATABAとIGBT素子TR1〜TR4のオン/オフ状態については、図6の場合と同様であるので説明は繰返さない。
【0079】
図2、図8を参照して、状態Bにおいては、リアクトル電流ILが正すなわち図2のノードN1からノードN2に向けて流れている期間と、リアクトル電流ILが負すなわち図2のノードN2からノードN1に向けて流れている期間とが繰返される。
【0080】
この場合は、時刻t3〜t4のIGBT素子TR2,TR3が導通している時間にデッドタイムTdt1を加えた時間、つまり時刻t1〜t4の間は1サイクルにおいてリアクトル電流ILが減少し、時刻t6〜t7のIGBT素子TR1,TR4が導通している時間にデッドタイムTdt2を加えた時間、つまり時刻t4〜t7の間は1サイクルにおいてリアクトル電流ILが増加する。
【0081】
したがって、仮に、基準信号GATEBAのデューティー比が50%であるとすると、デッドタイムTdt1,Tdt2が等しければ、状態Bでは、リアクトル電流ILは現状を維持する傾向となる。
【0082】
以上図6〜図8で説明したように、基準信号GATEBAのデューティー比と実際にリアクトルで電流の増加減少が行なわれるデューティーとは、リアクトルの電流状態で異なる。
【0083】
したがって、精度よく制御を行なうためにはリアクトルの電流状態に応じて、基準信号GATEBAのデューティー比を補正してやる必要がある。
【0084】
つまり、状態Aでは目標よりも基準信号GATEBAのデューティー比を小さく補正する必要があり、状態Cでは目標よりも基準信号GATEBAのデューティー比を大きく補正する必要がある。
【0085】
[デューティー比の補正処理]
図9は、実施の形態において、図2に示したDC−CPU31の一例であるDC−CPU31Aの構成を示したブロック図である。
【0086】
図9を参照して、DC−CPU31Aは、指令電圧値Vfcrとインバータ電圧値VINVとの偏差ΔVfcを演算する演算部72と、偏差ΔVfcの微分処理を行なう処理部74と、処理部74の出力に微分項ゲインKdVを掛ける演算部76と、偏差ΔVfcの積分処理を行なう処理部80と、処理部80の出力に積分項ゲインKiVを掛ける演算部82と、偏差ΔVfcに比例項KpVを掛ける演算部78と、演算部76,78,82の出力の和を演算する演算部84とを含む。演算部84は和信号Vfcを出力する。
【0087】
DC−CPU31Aは、さらに、電圧値Vfcreqを出力するフィードフォワード処理部86Aを含む。フィードフォワード処理部86Aは、指令電圧値Vfcrとバッテリ電圧値VBとを受けてVfcr/(VB+Vfcr)を演算し、目標デューティー比を算出する。また、電流センサSEの出力するリアクトル電流値ILを高速にサンプリングし、リアクトル電流の増加期間(Ton)、減少期間(Toff)を抽出し、これらから実デューティー比D=Ton/(Ton+Toff)を算出する。フィードフォワード処理部86Aは、実デューティー比を目標デューティー比に一致させる方向に補正を行なう。
【0088】
たとえば、実デューティー比の誤差を1%以内に収めたいときは、リアクトル電流値のサンプリング数を1周期(Ton+Toff)の間に100サンプル以上行なう必要がある。このように、実デューティー比の必要な精度に合わせて高速にサンプリングすることで、従来の平均値や推定値を用いたデューティー比の補正よりも精度の高い補正が指令値の変化直後から可能であり、要素72〜74のPID処理のみで補正を行なうよりも応答性を高めることができる。
【0089】
DC−CPU31Aは、さらに、電圧値Vfcと電圧値Vfcreqとを加算して電圧値V1を出力する加算処理部88と、電圧値V1を受けて基準信号GATABAを出力するPWM処理部92とを含む。
【0090】
PWM処理部92は、加算処理部88で加算された結果の電圧値V1に対応するスイッチング基準タイミングを示す信号GATEBAを図2のバッファ32および反転バッファ36に出力する。
【0091】
図10は、DC−CPU31Aのフィードフォワード処理部86Aで行なわれる処理を示したフローチャートである。この処理は、制御のメインルーチンから所定時間毎または所定の条件が成立する毎に呼び出されて実行される。
【0092】
図10を参照して、処理が開始されると、まずステップS1において、フィードフォワード処理部86Aは、図2の電流センサSEで検出されたリアクトル電流の波形の上り時間(増加期間、図3、図4のTon)と下り時間(減少期間、図3、図4のToff)を計測する。
【0093】
上り時間、下り時間の計測は、例えば次のように行なわれる。まずスイッチング周期の100分の1程度のサンプリング周期でリアクトル電流の測定値ILを高速にサンプリングする。各サンプリング時において、前回のサンプリング時の測定値との差分が正であるか負であるかによってリアクトル電流の増加減少を判断する。そしてリアクトル電流が減少から増加に転じた時点から、増加から減少に転じた時点までの時間が上り時間(Ton)である。また、リアクトル電流が増加から減少に転じた時点から、減少から増加に転じた時点までの時間が下り時間(Toff)である。この期間の計測は、例えばn回実行されて平均値が使用される。
【0094】
続いて、ステップS2において、実動作デューティー比を算出する。実動作デューティー比は、リアクトル電流の電流の向きが切り替わる点を正確に反映させたデューティー比である。
【0095】
つまり、図2でDCCPU31が出力する基準信号GATEBAは、デッドタイム生成部33,37の付加するデッドタイムの影響を受ける。デッドタイム生成部33,37から出力されたゲート信号MUP,MDN,GUP,GUNは、IGBT素子TR1〜TR4のターンオン、ターンオフ遅れの影響を受ける。実際には、さらに、IGBT素子TR1〜TR4がオフ期間であってもダイオードD1〜D4によってリアクトルに流れる電流が維持される場合もある。これらのさまざまな影響を受けた後に、リアクトル電流の増減の切り替わりが定まり、図3、図4で示される上り時間Ton、下り時間Toffが定まる。
【0096】
上り時間Ton、下り時間Toffから、次式(1)に基づいて実動作デューティー比Duty1を求める。
【0097】
Duty1=Ton/(Ton+Toff) ・・・(1)
続いて、ステップS3において、電圧指令値Vfcrとバッテリ電圧VBから、次式(1)に基づいて指令(目標)デューティー比Duty2を求める。
【0098】
Duty2=Vfcr/(Vfcr+VB) ・・・(2)
さらに、ステップS4において、指令デューティー比に対する実動作デューティー比の差ΔDutyを計算する。
【0099】
ΔDuty=Duty2−Duty1 ・・・(3)
ΔDutyが求まったら、ステップS5においてこれを電圧補正量に換算して補正した電圧Vfcreqを出力する。電圧Vfcreqは、図9の加算処理部88で電圧偏差からのフィードバック項Vfcと加算される。そして、加算処理部88はPWM処理部92に電圧V1を出力し、その結果信号GATEBAのデューティー比が補正される。
【0100】
デューティー比の補正が終了すると、ステップS6に処理が進み、制御はメインルーチンに移される。
【0101】
以上説明したように、フィードフォワード処理部86Aは、電圧指令値Vfcrとバッテリ電圧VBとの差で定まる目標デューティー比と、上り時間Ton、下り時間Toffを用いて求めた実動作デューティー比との差をゼロに近づけるようにフィードフォワード処理を行なう。
【0102】
図11は、図2に示したDC−CPU31の他の一例であるDC−CPU31Bの構成を示したブロック図である。
【0103】
図11を参照して、DC−CPU31Bは、図9に示したDC−CPU31Aの構成において、フィードフォワード処理部86Aに代えてフィードフォワード処理部86を含み、さらに積分項補正部81を含む。他の部分の構成については、図9で説明したフィードフォワード処理部86Aと同様であるので、説明は繰返さない。
【0104】
フィードフォワード処理部86は、電圧指令値Vfcrとバッテリ電圧VBから、式(2)に基づいて指令(目標)デューティー比Duty2を求める。
【0105】
Duty2=Vfcr/(Vfcr+VB) ・・・(2)
しかし、この目標デューティー比は、デッドタイム等のずれが考慮されていない値である。そして、通常デッドタイム分の補正のような定常的な偏差は、積分処理を行なう処理部80に蓄積される。
【0106】
そして、積分項補正部81は、リアクトル電流ILの波形を直接観測してリアクトル電流ILが増加していく時間Tonと減少している時間Toffとを求め、これらから実動作デューティー比を求める。
【0107】
そして、目標デューティー比と実動作デューティー比との差に相当する積分項を演算して処理部80に代入する。
【0108】
このようにすることにより、応答性がよくかつ精度の高い電圧制御が可能となる。
以上の説明を踏まえて、最後に、主として図2を参照して本実施の形態について総括的に再度説明をする。本実施の形態において、電圧変換装置(30)は、リアクトルLと、リアクトルLを通過するリアクトル電流を検出する電流検出部(SE)と、リアクトルLの一方端(N1)と第1の電源ノードとの間に設けられ、第1の活性化信号(MUP)に応じて導通する第1のスイッチング素子(TR1)を少なくとも含む第1の電流制御部と、第1の電源ノードとは電位の異なる第2の電源ノードとリアクトルの一方端(N1)との間に設けられ、第1の整流素子(D2)を少なくとも含む第2の電流制御部と、第1の活性化信号(MUP)のデューティー比を決定するスイッチング制御部(55)とを備える。スイッチング制御部(55)は、電圧指令値(Vfcr)に基づき算出した目標デューティー比とリアクトル電流の実デューティー比とに基づいて第1の活性化信号のデューティー比を決定する。スイッチング制御部(55)は、電流検出部(SE)の出力をモニタしてリアクトル電流の増加期間および減少期間を抽出し、増加期間および減少期間に基づいて実デューティー比を求める。
【0109】
好ましくは、スイッチング制御部(55)は、図9に示すように、第1の電源ノードの電圧(VB)と電圧指令値(Vfcr)とに基づいてフィードフォワード項を算出し、フィードフォワード項に対して実デューティー比に応じた補正を行なう、フィードフォワード処理部(86A)を含む。
【0110】
好ましくは、スイッチング制御部(55)は、目標デューティー比に対して電圧指令値(Vfcr)と出力電圧値(VINV)との偏差(ΔVfc)に基づくフィードバック制御を用いた補正を実行する。図11に示したように、フィードバック制御は、積分制御を含む。スイッチング制御部(55)は、積分制御の積分項が蓄積される積分処理部(80)と、電流検出部(SE)の出力を受けて実デューティー比を求め、積分処理部(80)に対して目標デューティー比と実デューティー比とのずれに応じた補正値を出力する積分項補正部(81)とを含む。
【0111】
好ましくは、第1の電流制御部は、第1のスイッチング素子と並列にリアクトルの一方端と第1の電源ノードとの間に設けられる第2の整流素子(D1)をさらに含む。第2の電流制御部は、第1の整流素子(D2)と並列にリアクトルの一方端と第2の電源ノードとの間に設けられる第2のスイッチング素子(TR2)をさらに含む。
【0112】
より好ましくは、第2のスイッチング素子(TR2)は、第2の活性化信号(MUN)に応じて導通する。スイッチング制御部(55)は、基準信号GATEBAに応じて第1、第2のスイッチング素子(TR1,TR2)を双方とも非導通状態に維持するデッドタイム分の非活性期間を設けた第1、第2の活性化信号を出力するデッドタイム生成部(33)と、目標デューティー比と実デューティー比とに基づいて基準信号を出力する補正制御部(31)とを含む。
【0113】
好ましくは、電圧変換装置(30)は、リアクトルの他方端(N2)と第3の電源ノードとの間に設けられる第3の電流制御部(TR3およびD3)と、第2の電源ノードとリアクトルの他方端(N2)との間に設けられる第4の電流制御部(TR4およびD4)とをさらに備える。電圧変換装置(30)は、第1の電源ノードと第3の電源ノードとの間で電圧変換を行なう。
【0114】
他の局面では、図9および図10に示すように、本実施の形態に係る発明は、リアクトルLと、リアクトルLを通過するリアクトル電流を検出する電流検出部(SE)と、リアクトルLの一方端(N1)と第1の電源ノードとの間に設けられ、第1の活性化信号(MUP)に応じて導通する第1のスイッチング素子(TR1)を少なくとも含む第1の電流制御部と、第1の電源ノードとは電位の異なる第2の電源ノードとリアクトルの一方端(N1)との間に設けられ、第1の整流素子(D2)を少なくとも含む第2の電流制御部とを含む電圧変換装置(30)の制御方法であって、電圧指令値(Vfcr)に基づいて目標デューティー比(Duty2)を算出するステップ(S3)と、電流検出部(SE)の出力をモニタしてリアクトル電流の増加期間(Ton)および減少期間(Toff)を抽出し、増加期間および減少期間に基づいて実デューティー比を求める実デューティー比を算出するステップ(S2)と、目標デューティー比と実デューティー比とに基づいて第1の活性化信号のデューティー比を決定するステップ(S5)とを備える。
【0115】
本実施の形態によれば、電圧変換装置の応答性を向上させるとともに、実際の電流値の波形から求めた実デューティー比を目標値に合わせるように補正するので、部品特性のばらつきや経年変化に適切に対応した精度の良い制御が可能となり、燃料電池自動車等において車両の制御性が向上する。
【0116】
今回開示された実施の形態はすべての点で例示であって制限的なものではないと考えられるべきである。本発明の範囲は上記した説明ではなくて特許請求の範囲によって示され、特許請求の範囲と均等の意味および範囲内でのすべての変更が含まれることが意図される。
【図面の簡単な説明】
【0117】
【図1】本発明の実施の形態に係る電圧変換器を搭載した車両の構成を示す説明図である。
【図2】図1のDC/DCコンバータ30について詳細な構成を示した回路図である。
【図3】スイッチング素子のデューティー比が50%より小さい場合のリアクトルに流れる電流の変化を説明するための図である。
【図4】スイッチング素子のデューティー比が50%より大きい場合のリアクトルに流れる電流の変化を説明するための図である。
【図5】リアクトル電流が3状態に分類されることを説明するための波形図である。
【図6】図5の状態Aにおける基準信号GATEBAとリアクトル電流の変化との関係を示した動作波形図である。
【図7】図5の状態Cにおける基準信号GATEBAとリアクトル電流の変化との関係を示した動作波形図である。
【図8】図5の状態Bにおける基準信号GATEBAとリアクトル電流の変化との関係を示した動作波形図である。
【図9】実施の形態において、図2に示したDC−CPU31の一例であるDC−CPU31Aの構成を示したブロック図である。
【図10】DC−CPU31Aのフィードフォワード処理部86Aで行なわれる処理を示したフローチャートである。
【図11】図2に示したDC−CPU31の他の一例であるDC−CPU31Bの構成を示したブロック図である。
【符号の説明】
【0118】
1 電源システム、6,14 平滑用コンデンサ、10 制御ユニット、11 アクセルペダルセンサ、20 バッテリ、21 SOCセンサ、22,44 電圧センサ、23,43 電流センサ、30 DC/DCコンバータ、32 バッファ、33,37 デッドタイム生成部、34,35,36,38,39 反転バッファ、40 燃料電池、41 流量センサ、42 ダイオード、50 車両補機、51 FC補機、55 スイッチング制御部、60 インバータ、61 モータ、62 車速センサ、63L,63R 車輪、72,76,78,82,84 演算部、74,80,92 処理部、81 積分項補正部、86,86A フィードフォワード処理部、88 加算処理部、D1〜D4 ダイオード、L リアクトル、SE 電流センサ、TR1〜TR4 IGBT素子。
【特許請求の範囲】
【請求項1】
リアクトルと、
前記リアクトルを通過するリアクトル電流を検出する電流検出部と、
前記リアクトルの一方端と第1の電源ノードとの間に設けられ、第1の活性化信号に応じて導通する第1のスイッチング素子を少なくとも含む第1の電流制御部と、
前記第1の電源ノードとは電位の異なる第2の電源ノードと前記リアクトルの前記一方端との間に設けられ、第1の整流素子を少なくとも含む第2の電流制御部と、
前記第1の活性化信号のデューティー比を決定するスイッチング制御部とを備え、
前記スイッチング制御部は、電圧指令値に基づき算出した目標デューティー比と前記リアクトル電流の実デューティー比とに基づいて前記第1の活性化信号のデューティー比を決定し、
前記スイッチング制御部は、前記電流検出部の出力をモニタして前記リアクトル電流の増加期間および減少期間を抽出し、前記増加期間および前記減少期間に基づいて前記実デューティー比を求める、電圧変換装置。
【請求項2】
前記スイッチング制御部は、
前記第1の電源ノードの電圧と前記電圧指令値とに基づいてフィードフォワード項を算出し、前記フィードフォワード項に対して前記実デューティー比に応じた補正を行なうフィードフォワード処理部を含む、請求項1に記載の電圧変換装置。
【請求項3】
前記スイッチング制御部は、前記目標デューティー比に対して前記電圧指令値と出力電圧値との偏差に基づくフィードバック制御を用いた補正を実行し、
前記フィードバック制御は、積分制御を含み、
前記スイッチング制御部は、
前記積分制御の積分項が蓄積される積分処理部と、
前記電流検出部の出力を受けて前記実デューティー比を求め、前記積分処理部に対して前記目標デューティー比と前記実デューティー比とのずれに応じた補正値を出力する積分項補正部とを含む、請求項1に記載の電圧変換装置。
【請求項4】
前記第1の電流制御部は、
前記第1のスイッチング素子と並列に前記リアクトルの前記一方端と前記第1の電源ノードとの間に設けられる第2の整流素子をさらに含み、
前記第2の電流制御部は、
第1の整流素子と並列に前記リアクトルの前記一方端と前記第2の電源ノードとの間に設けられる前記第2のスイッチング素子をさらに含む、請求項1に記載の電圧変換装置。
【請求項5】
前記第2のスイッチング素子は、第2の活性化信号に応じて導通し、
前記スイッチング制御部は、
基準信号に応じて前記第1、第2のスイッチング素子を双方とも非導通状態に維持するデッドタイム分の非活性期間を設けた前記第1、第2の活性化信号を出力するデッドタイム生成部と、
前記目標デューティー比と前記実デューティー比とに基づいて前記基準信号を出力する補正制御部とを含む、請求項4に記載の電圧変換装置。
【請求項6】
前記リアクトルの他方端と第3の電源ノードとの間に設けられる第3の電流制御部と、
前記第2の電源ノードと前記リアクトルの前記他方端との間に設けられる第4の電流制御部とをさらに備え、
前記電圧変換装置は、前記第1の電源ノードと前記第3の電源ノードとの間で電圧変換を行なう、請求項1に記載の電圧変換装置。
【請求項7】
請求項1〜6のいずれか1項に記載の電圧変換装置を備える車両。
【請求項8】
リアクトルと、前記リアクトルを通過するリアクトル電流を検出する電流検出部と、前記リアクトルの一方端と第1の電源ノードとの間に設けられ、第1の活性化信号に応じて導通する第1のスイッチング素子を少なくとも含む第1の電流制御部と、前記第1の電源ノードとは電位の異なる第2の電源ノードと前記リアクトルの前記一方端との間に設けられ、第1の整流素子を少なくとも含む第2の電流制御部とを含む電圧変換装置の制御方法であって、
電圧指令値に基づいて目標デューティー比を算出するステップと、
前記電流検出部の出力をモニタして前記リアクトル電流の増加期間および減少期間を抽出し、前記増加期間および前記減少期間に基づいて前記実デューティー比を求める実デューティー比を算出するステップと、
前記目標デューティー比と前記実デューティー比とに基づいて前記第1の活性化信号のデューティー比を決定するステップとを備える、電圧変換装置の制御方法。
【請求項1】
リアクトルと、
前記リアクトルを通過するリアクトル電流を検出する電流検出部と、
前記リアクトルの一方端と第1の電源ノードとの間に設けられ、第1の活性化信号に応じて導通する第1のスイッチング素子を少なくとも含む第1の電流制御部と、
前記第1の電源ノードとは電位の異なる第2の電源ノードと前記リアクトルの前記一方端との間に設けられ、第1の整流素子を少なくとも含む第2の電流制御部と、
前記第1の活性化信号のデューティー比を決定するスイッチング制御部とを備え、
前記スイッチング制御部は、電圧指令値に基づき算出した目標デューティー比と前記リアクトル電流の実デューティー比とに基づいて前記第1の活性化信号のデューティー比を決定し、
前記スイッチング制御部は、前記電流検出部の出力をモニタして前記リアクトル電流の増加期間および減少期間を抽出し、前記増加期間および前記減少期間に基づいて前記実デューティー比を求める、電圧変換装置。
【請求項2】
前記スイッチング制御部は、
前記第1の電源ノードの電圧と前記電圧指令値とに基づいてフィードフォワード項を算出し、前記フィードフォワード項に対して前記実デューティー比に応じた補正を行なうフィードフォワード処理部を含む、請求項1に記載の電圧変換装置。
【請求項3】
前記スイッチング制御部は、前記目標デューティー比に対して前記電圧指令値と出力電圧値との偏差に基づくフィードバック制御を用いた補正を実行し、
前記フィードバック制御は、積分制御を含み、
前記スイッチング制御部は、
前記積分制御の積分項が蓄積される積分処理部と、
前記電流検出部の出力を受けて前記実デューティー比を求め、前記積分処理部に対して前記目標デューティー比と前記実デューティー比とのずれに応じた補正値を出力する積分項補正部とを含む、請求項1に記載の電圧変換装置。
【請求項4】
前記第1の電流制御部は、
前記第1のスイッチング素子と並列に前記リアクトルの前記一方端と前記第1の電源ノードとの間に設けられる第2の整流素子をさらに含み、
前記第2の電流制御部は、
第1の整流素子と並列に前記リアクトルの前記一方端と前記第2の電源ノードとの間に設けられる前記第2のスイッチング素子をさらに含む、請求項1に記載の電圧変換装置。
【請求項5】
前記第2のスイッチング素子は、第2の活性化信号に応じて導通し、
前記スイッチング制御部は、
基準信号に応じて前記第1、第2のスイッチング素子を双方とも非導通状態に維持するデッドタイム分の非活性期間を設けた前記第1、第2の活性化信号を出力するデッドタイム生成部と、
前記目標デューティー比と前記実デューティー比とに基づいて前記基準信号を出力する補正制御部とを含む、請求項4に記載の電圧変換装置。
【請求項6】
前記リアクトルの他方端と第3の電源ノードとの間に設けられる第3の電流制御部と、
前記第2の電源ノードと前記リアクトルの前記他方端との間に設けられる第4の電流制御部とをさらに備え、
前記電圧変換装置は、前記第1の電源ノードと前記第3の電源ノードとの間で電圧変換を行なう、請求項1に記載の電圧変換装置。
【請求項7】
請求項1〜6のいずれか1項に記載の電圧変換装置を備える車両。
【請求項8】
リアクトルと、前記リアクトルを通過するリアクトル電流を検出する電流検出部と、前記リアクトルの一方端と第1の電源ノードとの間に設けられ、第1の活性化信号に応じて導通する第1のスイッチング素子を少なくとも含む第1の電流制御部と、前記第1の電源ノードとは電位の異なる第2の電源ノードと前記リアクトルの前記一方端との間に設けられ、第1の整流素子を少なくとも含む第2の電流制御部とを含む電圧変換装置の制御方法であって、
電圧指令値に基づいて目標デューティー比を算出するステップと、
前記電流検出部の出力をモニタして前記リアクトル電流の増加期間および減少期間を抽出し、前記増加期間および前記減少期間に基づいて前記実デューティー比を求める実デューティー比を算出するステップと、
前記目標デューティー比と前記実デューティー比とに基づいて前記第1の活性化信号のデューティー比を決定するステップとを備える、電圧変換装置の制御方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【公開番号】特開2008−182839(P2008−182839A)
【公開日】平成20年8月7日(2008.8.7)
【国際特許分類】
【出願番号】特願2007−15011(P2007−15011)
【出願日】平成19年1月25日(2007.1.25)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
【公開日】平成20年8月7日(2008.8.7)
【国際特許分類】
【出願日】平成19年1月25日(2007.1.25)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
[ Back to top ]