
電圧変換装置の制御装置
【課題】電圧変換装置に供給される電流の電流値を正確に検出する。
【解決手段】電圧変換装置の制御装置(30)は、デューティ指令信号(DUTY)を生成するデューティ指令信号生成手段(210)と、キャリア信号(CR)を生成するキャリア信号生成手段(250)と、スイッチング制御信号(PWC)を生成するスイッチング制御信号生成手段(235)と、第1スイッチング素子(Q1)を含む第1アーム及び第2スイッチング素子(Q2)を含む第2アームのいずれか一方のみによる片アーム駆動を実現する片アーム駆動制御手段(270)と、片アーム駆動を相互に切替える際に、第1及び第2スイッチング素子がいずれもオフとなるデューティ指令信号を所定期間生成するよう制御するデューティ制御手段(230)と、所定期間内に検出された電流値を原点として学習させる原点学習手段(290)とを備える。
【解決手段】電圧変換装置の制御装置(30)は、デューティ指令信号(DUTY)を生成するデューティ指令信号生成手段(210)と、キャリア信号(CR)を生成するキャリア信号生成手段(250)と、スイッチング制御信号(PWC)を生成するスイッチング制御信号生成手段(235)と、第1スイッチング素子(Q1)を含む第1アーム及び第2スイッチング素子(Q2)を含む第2アームのいずれか一方のみによる片アーム駆動を実現する片アーム駆動制御手段(270)と、片アーム駆動を相互に切替える際に、第1及び第2スイッチング素子がいずれもオフとなるデューティ指令信号を所定期間生成するよう制御するデューティ制御手段(230)と、所定期間内に検出された電流値を原点として学習させる原点学習手段(290)とを備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、例えば車両等に搭載される電圧変換装置の制御装置の技術分野に関する。
【背景技術】
【0002】
近年、環境に配慮した車両として、蓄電装置(たとえば二次電池やキャパシタ等)を搭載し、蓄電装置に蓄えられた電力から生じる駆動力を用いて走行する電動車両が注目されている。この電動車両には、たとえば電気自動車、ハイブリッド自動車、燃料電池車などが含まれる。
【0003】
これらの電動車両においては、発進時や加速時に蓄電装置から電力を受けて走行のための駆動力を発生するとともに、制動時に回生制動によって発電を行なって蓄電装置に電気エネルギを蓄えるためのモータジェネレータを備える場合がある。このように、走行状態に応じてモータジェネレータを制御するために、電動車両にはインバータが搭載される。
【0004】
このような車両においては、車両状態によって変動するインバータが利用する電力を安定的に供給するために、蓄電装置とインバータとの間に電圧変換装置(コンバータ)が備えられる場合がある。このコンバータにより、インバータの入力電圧を蓄電装置の出力電圧より高くして、モータの高出力化ができるとともに、同一出力時のモータ電流を低減することで、インバータ及びモータの小型化、低コスト化を図ることができる。
【0005】
上述したコンバータを備える構成では、例えば装置の動作を制御するために、蓄電装置等から入力される電力の電流値を検出する電流センサが設けられる。このような電流センサでは、例えば基準となるオフセット値(即ち、原点)をもとに値を検出するが、原点にずれが発生すると正確な値を検出することが困難となる。このため、例えば特許文献1では、電流を遮断した状態で電流センサのオフセット補正を行うという技術が提案されている。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2006−246564号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
しかしながら、上述した特許文献1に記載の技術では、完全に電流を遮断した状態でしかオフセット補正が行えないため、コンバータの動作中にはオフセット補正は行えない。よって、例えば自動車用途のように運転状態が長時間継続する場合には、オフセット補正を行う機会が起動直後に限られてしまい、定期的にオフセット補正を行うことはできない。このため、例えば運転中の温度特性の変化等に起因して原点のずれが発生してしまうと、運転が終了するまで間違った値が検出され続けてしまうおそれがある。
【0008】
以上のように、上述した特許文献1に記載の技術は、電流センサのオフセット補正の機会が限定されてしまうため、検出値の正確性が著しく低下してしまうおそれがあるという技術的問題点を有している。
【0009】
本発明は、上述した問題点に鑑みなされたものであり、電圧変換装置に供給される電流の電流値を正確に検出することが可能な電圧変換装置の制御装置を提供することを課題とする。
【課題を解決するための手段】
【0010】
本発明の電圧変換装置の制御装置は上記課題を解決するために、互いに直列に接続される第1スイッチング素子及び第2スイッチング素子、並びに前記第1スイッチング素子及び前記第2スイッチング素子に供給される電流の電流値を検出する電流検出手段を備える電圧変換装置の制御装置であって、前記第1スイッチング素子及び前記第2スイッチング素子のデューティ比率に対応するデューティ指令信号を生成するデューティ指令信号生成手段と、前記第1スイッチング素子及び前記第2スイッチング素子のスイッチング周波数に対応するキャリア信号を生成するキャリア信号生成手段と、前記デューティ指令信号及び前記キャリア信号を互いに比較することで、前記第1スイッチング素子及び前記第2スイッチング素子の各々のオンオフを切替えるスイッチング制御信号を夫々生成するスイッチング制御信号生成手段と、前記第1スイッチング素子及び前記第2スイッチング素子を択一的にオンとするように前記スイッチング制御信号生成手段を制御することで、前記第1スイッチング素子を含んでなる第1アーム及び前記第2スイッチング素子を含んでなる第2アームのいずれか一方のみによる片アーム駆動を実現する片アーム駆動制御手段と、前記第1アームによる片アーム駆動及び前記第2アームによる片アーム駆動を相互に切替える際に、前記第1スイッチング素子及び前記第2スイッチング素子がいずれもオフとなるデューティ指令信号を所定期間生成するようにデューティ指令信号生成手段を制御するデューティ制御手段と、前記所定期間内に前記電流検出手段で検出された電流値をオフセット原点として学習させる原点学習手段とを備える。
【0011】
本発明に係る電圧変換装置は、例えば車両に搭載されるコンバータであり、互いに直列に接続される第1スイッチング素子及び第2スイッチング素子を備えている。第1スイッチング素子及び第2スイッチング素子としては、例えばIGBT(Insulated Gate Bipolar Transistor)、電力用MOS(Metal Oxide Semiconductor)トランジスタ、或いは電力用バイポーラトランジスタ等を用いることができる。
【0012】
なお、第1スイッチング素子及び第2スイッチング素子の各々には、例えばダイオードが並列に接続されており、それぞれ第1アーム及び第2アームを形成している。即ち、第1スイッチング素子は第1アームを形成しており、そのスイッチング動作によって、第1アームにおける駆動のオンオフを切替えることができる。同様に、第2スイッチング素子は第2アームを形成しており、そのスイッチング動作によって、第2アームにおける駆動のオンオフを切替えることができる。
【0013】
本発明に係る電圧変換装置は更に、第1スイッチング素子及び第2スイッチング素子に供給される電流の電流値を検出する電流検出手段を備えている。電流検出手段は、例えば第1スイッチング素子及び第2スイッチング素子に電流を供給する経路に配置されたリアクトルの前段部分に設けられる。電流検出手段は、予め設定されたオフセット原点と検出された値との差に基づいて電流値を検出する。
【0014】
本発明に係る電圧変換装置の制御装置は、上述した電圧変換装置の動作を制御する装置であって、例えば、一又は複数のCPU(Central Processing Unit)、MPU(Micro Processing Unit)、各種プロセッサ又は各種コントローラ、或いは更にROM(Read Only Memory)、RAM(Random Access Memory)、バッファメモリ又はフラッシュメモリ等の各種記憶手段等を適宜に含み得る、単体の或いは複数のECU(Electronic Controlled Unit)等の各種処理ユニット、各種コントローラ或いはマイコン装置等各種コンピュータシステム等の形態を採り得る。
【0015】
本発明に係る電圧変換装置の制御装置の動作時には、デューティ指令信号生成手段によって、第1スイッチング素子及び第2スイッチング素子のデューティ比率に対応するデューティ指令信号が生成される。デューティ指令信号は、例えば出力すべき電圧値や電流値等に基づいて決定される。
【0016】
また本発明に係る電圧変換装置の制御装置の動作時には、キャリア信号生成手段によって、第1スイッチング素子及び第2スイッチング素子のスイッチング周波数に対応するキャリア信号が生成される。キャリア信号は、予め設定された周波数を有する信号として生成される。
【0017】
デューティ指令信号及びキャリア信号は、スイッチング制御信号生成手段によって互いに比較され、その結果として、第1スイッチング素子及び第2スイッチング素子の各々のオンオフを切替えるスイッチング制御信号が夫々生成される。スイッチング制御信号は、第1スイッチング素子及び第2スイッチング素子に供給される。これにより、電圧変換装置の第1アーム及び第2アームの駆動が制御されることになる。
【0018】
上述したスイッチング制御信号生成手段は、片アーム駆動制御手段によって、第1スイッチング素子及び第2スイッチング素子を択一的にオンとするように制御される場合がある。このような制御によれば、第1スイッチング素子を含んでなる第1アーム及び第2スイッチング素子を含んでなる第2アームのいずれか一方のみによる片アーム駆動が実現される。
【0019】
片アーム駆動制御手段は、第1スイッチング素子を含んでなる第1アーム及び第2スイッチング素子を選択する際に、例えば出力すべき電圧値や電流値等に基づいて、第1アーム及び第2アームのいずれのアームで片アーム駆動を行うべきか判定する。より具体的には、片アーム駆動制御手段は、例えば電圧変換装置に接続されるモータジェネレータが回生動作を行う場合に、第1アームによる片アーム駆動を行うようにし、力行動作を行う場合に、第2アームによる片アーム駆動を行うようにする。このように、片アーム駆動制御手段は、第1アームによる片アーム駆動及び第1アームによる片アーム駆動を適宜切替えるように制御する。
【0020】
ここで本発明では特に、第1アームによる片アーム駆動及び第2アームによる片アーム駆動を相互に切替える際に、デューティ制御手段によって、第1スイッチング素子及び第2スイッチング素子がいずれもオフとなるデューティ指令信号(例えば、デューティ比率が100%又は0%である信号)を所定期間生成するようにデューティ指令信号生成手段が制御される。なお、ここでの「所定期間」とは、後述する電流検出手段の原点学習において、電流検出手段で検出される電流の電流値が十分なまでに低くなる(好適にはゼロとなる)のに要する期間であり、予め理論的、実験的或いは経験的に求められ設定されている。
【0021】
本発明では更に、第1スイッチング素子及び第2スイッチング素子がいずれもオフとなるデューティ指令信号が生成される所定期間内に、原点学習手段によって、電流検出手段で検出された電流値がオフセット原点として学習させられる。即ち、原点学習手段は、それまで記憶していたオフセット原点を、所定期間内に得られた値へと置き換えるような補正を行う。
【0022】
上述したように、第1スイッチング素子及び第2スイッチング素子がいずれもオフとなるように制御されると、その間、電流検出手段で検出される値はゼロに向かって減衰する。よって、所定期間内(好適には所定期間の終了直前)に検出された値をオフセット原点とすれば、電流検出手段において検出される電流値の正確性を高めることができる。より具体的には、例えば温度特性の変化等に起因して変化したオフセット原点の値を、アーム切替えの度に正確な値へと更新することができる。
【0023】
なお、原点学習はアーム切替えの度に常に行われずともよく、オフセット原点が変化したおそれがある場合(例えば、前回の学習から所定時間が経過した場合や、前回の学習から環境温度が所定値変化した場合)に行われればよい。
【0024】
また、アーム切替えの際に、上述した第1スイッチング素子及び第2スイッチング素子がいずれもオフとなる所定期間を設けることで、第1スイッチング素子及び第2スイッチング素子の一方をオフとしてから、他方をオンとするまでの期間が短くなる(即ち、第1スイッチング素子及び第2スイッチング素子のスイッチングのタイミングが互いに近くなる)ことに起因する、第1スイッチング素子及び第2スイッチング素子の短絡を好適に防止することができる。
【0025】
以上説明したように、本発明に係る電圧変換装置の制御装置によれば、電圧変換装置における2つのスイッチング素子の短絡を防止すると共に、電圧変換装置に供給される電流の電流値を正確に検出することが可能である。
【0026】
本発明の作用及び他の利得は次に説明する発明を実施するための形態から明らかにされる。
【図面の簡単な説明】
【0027】
【図1】実施形態に係る電圧変換装置の制御装置が搭載される車両の全体構成を示す概略図である。
【図2】実施形態に係るECUの構成を示すブロック図である。
【図3】実施形態に係る電圧変換装置の制御装置の全体動作を示すフローチャートである。
【図4】実施形態に係る電圧変換装置の制御装置の原点学習動作を示すフローチャートである。
【図5】実施形態に係る電圧変換装置の制御装置の原点学習時の各種パラメータの変化を示すタイミングチャートである。
【発明を実施するための形態】
【0028】
以下では、本発明の実施形態について図を参照しつつ説明する。
【0029】
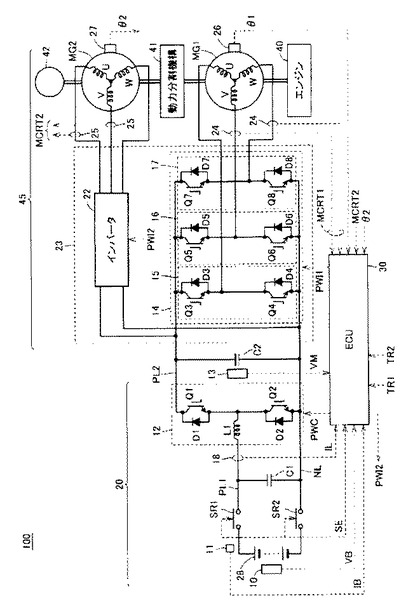
先ず、本実施形態に係る電圧変換装置の制御装置が搭載される車両の全体構成について、図1を参照して説明する。ここに図1は、本実施形態に係る電圧変換装置の制御装置が搭載される車両の全体構成を示す概略図である。
【0030】
図1において、本実施形態に係る電圧変換装置の制御装置が搭載される車両100は、エンジン40及びモータジェネレータMG1及びMG2を動力源とするハイブリッド車両として構成されている。但し、車両100の構成はこれに限定されるものではなく、蓄電装置からの電力によって走行可能な車両(例えば、電気自動車や燃料電池自動車)等にも適用可能である。また、本実施形態では、電圧変換装置の制御装置が車両100に搭載される構成について説明するが、車両以外でも交流電動機により駆動される機器であれば適用が可能である。
【0031】
車両100は、直流電圧発生部20と、負荷装置45と、平滑コンデンサC2と、ECU30とを備えて構成されている。
【0032】
直流電圧発生部20は、蓄電装置28と、システムリレーSR1,SR2と、平滑コンデンサC1と、コンバータ12とを含む。
【0033】
蓄電装置28は、例えばニッケル水素又はリチウムイオン等の二次電池や、電気二重層キャパシタ等の蓄電装置を含んで構成される。また、蓄電装置28が出力する直流電圧VB及び入出力される直流電流IBは、電圧センサ10及び電流センサ11によってそれぞれ検出される。そして、電圧センサ10及び電流センサ11は、検出した直流電圧VB及び直流電流IBの検出値をECU30に出力する。
【0034】
システムリレーSR1は、蓄電装置28の正極端子及び電力線PL1の間に接続され、システムリレーSR2は、蓄電装置28の負極端子及び接地線NLの間に接続される。システムリレーSR1,SR2は、ECU30からの信号SEにより制御され、蓄電装置28からコンバータ12への電力の供給と遮断とを切替える。
【0035】
コンバータ12は、本発明の「電圧変換装置」の一例であり、リアクトルL1と、スイッチング素子Q1,Q2と、ダイオードD1,D2とを含む。スイッチング素子Q1及びQ2は、本発明の「第1スイッチング素子」及び「第2スイッチング素子」の一例であり、電力線PL2及び接地線NLの間に直列に接続される。スイッチング素子Q1及びQ2は、ECU30からのスイッチング制御信号PWCによって制御される。
【0036】
スイッチング素子Q1及びQ2には、例えばIGBT、電力用MOSトランジスタあるいは、電力用バイポーラトランジスタ等を用いることができる。スイッチング素子Q1,Q2に対しては、逆並列ダイオードD1,D2が配置される。リアクトルL1は、スイッチング素子Q1及びQ2の接続ノードと電力線PL1の間に設けられる。また、平滑コンデンサC2は、電力線PL2及び接地線NLの間に接続される。
【0037】
電流センサ18は、本発明の「電流検出手段」の一例であり、リアクトルL1を流れるリアクトル電流を検出し、その検出値ILをECU30に出力する。
【0038】
負荷装置45は、インバータ23と、モータジェネレータMG1,MG2と、エンジン40と、動力分割機構41と、駆動輪42とを含む。また、インバータ23は、モータジェネレータMG1を駆動するためのインバータ14と、モータジェネレータMG2を駆動するためのインバータ22とを含む。なお、図1のようにインバータ及びモータジェネレータを2組備えることは必須ではなく、たとえばインバータ14とモータジェネレータMG1、あるいはインバータ22とモータジェネレータMG2のいずれか1組のみを備える構成としてもよい。
【0039】
モータジェネレータMG1,MG2は、インバータ23から供給される交流電力を受けて車両推進のための回転駆動力を発生する。また、モータジェネレータMG1,MG2は、外部から回転力を受け、ECU30からの回生トルク指令によって交流電力を発電するとともに回生制動力を車両100に発生する。
【0040】
また、モータジェネレータMG1,MG2は、動力分割機構41を介してエンジン40にも連結される。そして、エンジン40の発生する駆動力とモータジェネレータMG1,MG2の発生する駆動力とが最適な比率となるように制御される。また、モータジェネレータMG1,MG2のいずれか一方を専ら電動機として機能させ、他方のモータジェネレータを専ら発電機として機能させてもよい。なお、本実施形態においては、モータジェネレータMG1をエンジン40により駆動される発電機として機能させ、モータジェネレータMG2を駆動輪42を駆動する電動機として機能させるものとする。
【0041】
動力分割機構41には、エンジン40の動力を、駆動輪42とモータジェネレータMG1との両方に振り分けるために、例えば遊星歯車機構(プラネタリギヤ)が使用される。
【0042】
インバータ14は、コンバータ12から昇圧された電圧を受けて、たとえばエンジン40を始動させるためにモータジェネレータMG1を駆動する。また、インバータ14は、エンジン40から伝達される機械的動力によってモータジェネレータMG1で発電された回生電力をコンバータ12に出力する。このときコンバータ12は、降圧回路として動作するようにECU30によって制御される。
【0043】
インバータ14は、電力線PL2及び接地線NLの間に並列に設けられ、U相上下アーム15と、V相上下アーム16と、W相上下アーム17を含んで構成される。各相上下アームは、電力線PL2及び接地線NLの間に直列接続されたスイッチング素子から構成される。たとえば、U相上下アーム15は、スイッチング素子Q3,Q4から成り、V相上下アーム16は、スイッチング素子Q5,Q6から成り、W相上下アーム17は、スイッチング素子Q7,Q8から成る。また、スイッチング素子Q3〜Q8に対して、逆並列ダイオードD3〜D8がそれぞれ接続される。スイッチング素子Q3〜Q8は、ECU30からのスイッチング制御信号PWIによって制御される。
【0044】
例えばモータジェネレータMG1は、3相の永久磁石型同期電動機であり、U,V,W相の3つのコイルの一端が中性点に共通接続される。さらに、各相コイルの他端は、各相上下アーム15〜17のスイッチング素子の接続ノードと接続される。
【0045】
インバータ22は、コンバータ12に対してインバータ14と並列的に接続される。
【0046】
インバータ22は駆動輪42を駆動するモータジェネレータMG2に対してコンバータ12の出力する直流電圧を三相交流に変換して出力する。またインバータ22は、回生制動に伴い、モータジェネレータMG2において発電された回生電力をコンバータ12に出力する。このときコンバータ12は降圧回路として動作するようにECU30によって制御される。インバータ22の内部の構成は、図示しないがインバータ14と同様であり、詳細な説明については省略する。
【0047】
コンバータ12は、基本的には、各スイッチング周期内でスイッチング素子Q1及びQ2が相補的かつ交互にオンオフするように制御される。コンバータ12は、昇圧動作時には、蓄電装置28から供給された直流電圧VBを直流電圧VM(インバータ14への入力電圧に相当するこの直流電圧を、以下「システム電圧」とも称する)に昇圧する。この昇圧動作は、スイッチング素子Q2のオン期間にリアクトルL1に蓄積された電磁エネルギを、スイッチング素子Q1及び逆並列ダイオードD1を介して、電力線PL2へ供給することにより行われる。
【0048】
また、コンバータ12は、降圧動作時には、直流電圧VMを直流電圧VBに降圧する。この降圧動作は、スイッチング素子Q1のオン期間にリアクトルL1に蓄積された電磁エネルギを、スイッチング素子Q2及び逆並列ダイオードD2を介して、接地線NLへ供給することにより行われる。
【0049】
これらの昇圧動作及び降圧動作における電圧変換比(VM及びVBの比)は、上記スイッチング周期におけるスイッチング素子Q1,Q2のオン期間比(デューティ比)により制御される。なお、スイッチング素子Q1及びQ2をオン及びオフにそれぞれ固定すれば、VM=VB(電圧変換比=1.0)とすることもできる。
【0050】
平滑コンデンサC2は、コンバータ12からの直流電圧を平滑化し、その平滑化した直流電圧をインバータ23へ供給する。電圧センサ13は、平滑コンデンサC2の両端の電圧、すなわち、システム電圧VMを検出し、その検出値をECU30へ出力する。
【0051】
インバータ14は、モータジェネレータMG1のトルク指令値が正(TR1>0)の場合には、平滑コンデンサC2から直流電圧が供給されるとECU30からのスイッチング制御信号PWI1に応答した、スイッチング素子Q3〜Q8のスイッチング動作により直流電圧を交流電圧に変換して正のトルクを出力するようにモータジェネレータMG1を駆動する。また、インバータ14は、モータジェネレータMG1のトルク指令値が零の場合(TR1=0)には、スイッチング制御信号PWI1に応答したスイッチング動作により、直流電圧を交流電圧に変換してトルクが零になるようにモータジェネレータMG1を駆動する。これにより、モータジェネレータMG1は、トルク指令値TR1によって指定された零または正のトルクを発生するように駆動される。
【0052】
更に、車両100の回生制動時には、モータジェネレータMG1のトルク指令値TR1は負に設定される(TR1<0)。この場合には、インバータ14は、スイッチング制御信号PWI1に応答したスイッチング動作により、モータジェネレータMG1が発電した交流電圧を直流電圧に変換し、その変換した直流電圧(システム電圧)を、平滑コンデンサC2を介してコンバータ12へ供給する。なお、ここで言う回生制動とは、電動車両を運転するドライバーによるフットブレーキ操作があった場合の回生発電を伴う制動や、フットブレーキを操作しないものの、走行中にアクセルペダルをオフすることで回生発電をさせながら車両を減速(または加速の中止)させることを含む。
【0053】
インバータ22についても同様に、モータジェネレータMG2のトルク指令値に対応したECU30からのスイッチング制御信号PWI2を受け、スイッチング制御信号PWI2応答したスイッチング動作によって、直流電圧を交流電圧に変換して所定のトルクになるようにモータジェネレータMG2を駆動する。
【0054】
電流センサ24,25は、モータジェネレータMG1,MG2に流れるモータ電流MCRT1,MCRT2を検出し、その検出したモータ電流をECU30へ出力する。なお、U相,V相,W相の各相の電流の瞬時値の和はゼロであるので、図1に示すように電流センサ24,25は2相分のモータ電流を検出するように配置すれば足りる。
【0055】
回転角センサ(レゾルバ)26,27は、モータジェネレータMG1,MG2の回転角θ1,θ2を検出し、その検出した回転角θ1,θ2をECU30へ送出する。ECU30では、回転角θ1,θ2に基づきモータジェネレータMG1,MG2の回転速度MRN1,MRN2及び角速度ω1,ω2(rad/s)を算出できる。なお、回転角センサ26,27については、回転角θ1,θ2をECU30にてモータ電圧や電流から直接演算することによって、配置しないようにしてもよい。
【0056】
ECU30は、本発明の「電圧変換装置の制御装置」の一例であり、いずれも図示しないがCPU(Central Processing Unit)、記憶装置及び入出力バッファを含み、車両100の各機器を制御する。なお、これらの制御については、ソフトウェアによる処理に限られず、専用のハードウェア(電子回路)で構築して処理することも可能である。
【0057】
代表的な機能として、ECU30は、入力されたトルク指令値TR1,TR2、電圧センサ10によって検出された直流電圧VB、電流センサ11によって検出された直流電流IB、電圧センサ13によって検出されたシステム電圧VM及び電流センサ24,25からのモータ電流MCRT1,MCRT2、回転角センサ26,27からの回転角θ1,θ2等に基づいて、モータジェネレータMG1,MG2がトルク指令値TR1,TR2に従ったトルクを出力するように、コンバータ12及びインバータ23の動作を制御する。すなわち、コンバータ12及びインバータ23を上記のように制御するためのスイッチング制御信号PWC,PWI1,PWI2を生成して、コンバータ12及びインバータ23へそれぞれ出力する。
【0058】
コンバータ12の昇圧動作時には、ECU30は、システム電圧VMをフィードバック制御し、システム電圧VMが電圧指令値に一致するようにスイッチング制御信号PWCを生成する。
【0059】
また、ECU30は、車両100が回生制動モードに入ると、モータジェネレータMG1,MG2で発電された交流電圧を直流電圧に変換するようにスイッチング制御信号PWI1、PWI2を生成してインバータ23へ出力する。これにより、インバータ23は、モータジェネレータMG1,MG2で発電された交流電圧を直流電圧に変換してコンバータ12へ供給する。
【0060】
さらに、ECU30は、車両100が回生制動モードに入ると、インバータ23から供給された直流電圧を降圧するようにスイッチング制御信号PWCを生成し、コンバータ12へ出力する。これにより、モータジェネレータMG1,MG2が発電した交流電圧は、直流電圧に変換され、さらに降圧されて蓄電装置28に供給される。
【0061】
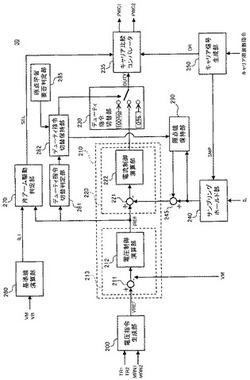
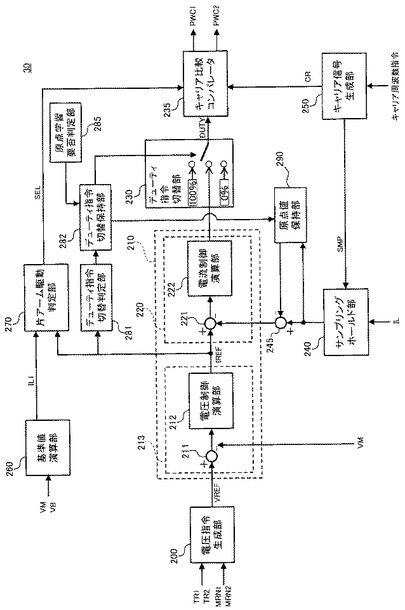
次に、本実施形態に係る電圧変換装置の制御装置であるECU30の具体的な構成について、図2を参照して説明する。ここに図2は、本実施形態に係るECUの構成を示すブロック図である。
【0062】
図2において、本実施形態に係るECU30は、電圧指令生成部200と、電圧制御部210と、デューティ指令切替部230と、キャリア比較コンパレータ250と、サンプリングホールド部240と、キャリア信号生成部250と、基準値演算部260と、片アーム駆動判定部270と、デューティ指令切替判定部281と、デューティ指令切替保持部282と、原点学習要否判定部285と、原点値保持部290とを備えて構成されている。
【0063】
電圧指令生成部200は、モータジェネレータMG1,MG2への要求トルクTR1,TR2と、モータジェネレータMG1,MG2の回転速度MRN1,MRN2の入力を受ける。そして、これらの情報に基づいて、電圧指令生成部200は、コンバータ12の出力電圧(すなわち、インバータ14の入力電圧)の電圧指令VREFを生成する。
【0064】
電圧制御部210は、本発明の「デューティ指令信号生成手段」の一例であり、減算部211及び電圧制御演算部212を含む電流指令生成部213と、減算部221及び電流制御演算部222を含む電流制御部220とを備えて構成されている。
【0065】
電流指令生成部213における減算部211は、電圧指令生成部200から入力を受ける電圧指令VREFと、電圧センサ13により検出されたコンバータ12のシステム電圧のフィードバック値VMとの電圧偏差を演算し、演算結果を電圧制御演算部212に出力する。
【0066】
電圧制御演算部212は、減算部211によって演算された電圧偏差をPI演算することによって、リアクトルL1に流れるリアクトル電流指令値ILREFを演算する。
【0067】
このように、電流指令生成部213においては、コンバータ12のシステム電圧のフィードバック制御を行うことによって、リアクトル電流指令値ILREFを演算する。
【0068】
そして、電圧制御演算部212は、このリアクトル電流指令値ILREFを、電流制御部220、片アーム駆動判定部270及びデューティ指令切替判定部281へ出力する。
【0069】
電流制御部220における減算部221は、電圧制御演算部212からのリアクトル電流指令値ILREFと、サンプリングホールド部240によって、スイッチング周期ごとに検出値がホールドされたリアクトル電流ILのフィードバック値との電流偏差を演算し、電流制御演算部222に出力する。
【0070】
電流制御演算部222は、減算部221により演算された電流偏差をPI演算することによって、スイッチング素子Q1,Q2のデューティを演算する。なお、電流制御演算部222は、後述する片アーム駆動判定部270からの選択フラグSELによって、スイッチング素子Q1またはQ2の片アーム駆動制御が選択された場合には、選択された側のスイッチング素子のみによって、リアクトル電流指令値ILREFが出力されるようにデューティを演算する。
【0071】
デューティ指令切替部230は、本発明の「デューティ制御手段」の一例であり、電流制御演算部222からのデューティ、デューティ比率が100%とされた所定のデューティ及びデューティ比率が0%とされた所定のデューティからいずれか1つを選択して、キャリア比較コンパレータ235にデューティ信号DUTYを出力する。
【0072】
キャリア比較コンパレータ235は、本発明の「スイッチング制御信号生成手段」の一例であり、デューティ信号DUTYと、キャリア信号生成部250からの搬送波CRとの比較に基づいて、コンバータ12の各相の上下アームのスイッチング素子Q1,Q2のオンオフを制御するスイッチング制御信号PWCを生成する。このとき、キャリア比較コンパレータ235は、片アーム駆動判定部270からの選択フラグSELに従って、駆動するスイッチング素子Q1,Q2を選択する。
【0073】
このスイッチング制御信号PWCによって、モータジェネレータMG1,MG2が力行の場合は、蓄電装置28からの出力電圧を所望のインバータ23の入力電圧まで昇圧する。また、モータジェネレータMG1,MG2が回生の場合は、モータジェネレータMG1,MG2により発電されインバータ23によって変換された直流電力を、蓄電装置28が充電可能な電圧まで降圧する。
【0074】
キャリア信号生成部250は、本発明の「キャリア信号生成手段」の一例であり、キャリア周波数指令に応じた周波数のキャリア信号CRを、キャリア比較コンパレータ235に出力する。また、キャリア信号生成部250は、サンプリングホールド部240に、キャリア信号CRの1周期ごとにサンプリング信号SMPを出力する。サンプリングホールド部240は、各サンプリング信号SMP入力時に、電流センサ18により検出されたリアクトル電流ILを検出して保持し、その検出した電流値を減算部245に出力する。
【0075】
原点値保持部290は、オフセットにより正確な電流値を検出するための原点値を保持しており、減算部245に原点値を出力する。減算部245は、サンプリングホールド部245から入力される値に対して、原点値保持部290から入力される原点値による減算処理を行い、演算結果として得られる値を減算部221へと出力する。なお、原点値保持部290に保持されている原点値は、後述する学習動作によって書き換え可能とされている。
【0076】
基準値演算部260は、蓄電装置28の出力電圧VBと、システム電圧VMの入力を受ける。そして、これらの情報から、搬送波CRの1周期中にリアクトル電流ILの方向が正から負、または負から正に切替わる状態となる電流基準値IL1を演算して、片アーム駆動判定部270へ出力する。
【0077】
片アーム駆動判定部270は、電圧制御演算部212からのリアクトル電流指令値ILREFと、基準値演算部260からの電流基準値IL1との入力を受ける。片アーム駆動判定部270は、これらの情報に基づいて、駆動するスイッチング素子の選択を行う。そして、片アーム駆動判定部270は、選択結果である選択フラグSELをキャリア比較コンパレータ235へ出力する。
【0078】
デューティ指令切替判定部281は、電圧制御演算部212からのリアクトル電流指令値ILREFを入力として受け、デューティ指令切替部230におけるスイッチをいずれに切替えるかを判定する。即ち、デューティ指令切替部230から、電流制御演算部222からのデューティ、デューティ比率が100%とされた所定のデューティ及びデューティ比率が0%とされた所定のデューティのいずれをデューティ信号DUTYとして出力させるかを判定する。デューティ指令切替部230における判定結果は、デューティ指令切替保持部282に出力される。
【0079】
原点学習要否判定部285は、原点保持部290に保持されている原点値が正確でないと推測される場合に、原点学習を行うべきであると判定する。原点学習要否判定部285は、例えば前回の学習時から所定時間が経過した場合や、環境温度が所定値以上変化した場合に原点学習を行うべきであると判定する。原点学習要否判定部285における判定結果は、デューティ指令切替保持部282に出力される。
【0080】
デューティ指令切替保持部282は、上述したデューティ指令切替部230における判定結果及び原点学習要否判定部285における判定結果を入力として受け、これら判定結果に基づいて、デューティ指令切替部230におけるスイッチ切替制御及び原点値保持部290における原点値の学習を実行させる。即ち、ここでのデューティ指令切替保持部282は、本発明の「原点学習手段」の一例である。デューティ指令切替保持部282の詳細な動作については後に詳述する。
【0081】
上述した各部位を含んで構成されたECU30は、一体的に構成された電子制御ユニットであり、上記各部位に係る動作は、全てECU30によって実行されるように構成されている。但し、本発明に係る上記部位の物理的、機械的及び電気的な構成はこれに限定されるものではなく、例えばこれら各部位は、複数のECU、各種処理ユニット、各種コントローラ或いはマイコン装置等各種コンピュータシステム等として構成されていてもよい。
【0082】
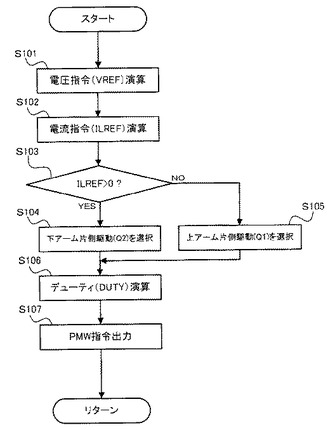
次に、本実施形態に係る電圧変換装置の制御装置の動作について、図3を参照して説明する。ここに図3は、本実施形態に係る電圧変換装置の制御装置の全体動作を示すフローチャートである。なお、図3に示されるフローチャート中の各ステップは、説明の便宜上、デューティ指令切替時の処理及び原点学習時の処理を除いたものとなっている。これら除外された処理については後に図4を参照して説明するものとし、ここでは装置の全体的な処理の流れについて説明する。
【0083】
図3において、本実施形態に係る電圧変換装置の制御装置の動作時には、ECU30は、電圧指令生成部200によって電圧指令VREFを演算する(ステップS101)。
【0084】
続いて、ECU30は、電圧制御演算部212によってリアクトル電流指令値ILREFを演算する(ステップS102)。
【0085】
次に、ECU30は、リアクトル電流指令ILREFが正か否か、すなわちモータジェネレータMG1,MG2が力行状態で制御されるか否かを判定する(ステップS103)。
【0086】
ここで、リアクトル電流指令ILREFが正の場合(ステップS103:YES)、ECU30は、下アームであるスイッチング素子Q2の片アーム駆動制御を行うように、片アーム駆動判定部270によって設定する(ステップS104)。
【0087】
一方、リアクトル電流指令ILREFがゼロまたは負の場合(ステップS103:NO)、モータジェネレータMG1,MG2が回生状態で制御されるので、ECU30は、上アームであるスイッチング素子Q1の片アーム駆動制御を行うように設定する(ステップS105)。なお、リアクトル電流指令ILREFがゼロの場合には、コンバータ12よる電圧変換は行われないので、実際には上下アームとも駆動されない。
【0088】
次に、ECU30は、ステップS104又はステップS105で設定された駆動アームと、リアクトル電流指令値ILREFに基づいて、電流制御演算部222によって、スイッチング素子Q1,Q2のデューティを演算する(ステップS106)。
【0089】
そして、ECU30は、スイッチング素子Q1,Q2のデューティDUTYとキャリア信号CRとの比較に基づいて、キャリア比較コンパレータ235によってコンバータ12のスイッチング素子Q1,Q2を駆動するスイッチング制御信号PWC1及びPWC2を生成し、コンバータ12に出力する。
【0090】
以上のような処理によって生成されたスイッチング制御信号PWCに従いコンバータ12が制御されることによって、モータジェネレータMG1,MG2が力行の場合は下アーム(スイッチング素子Q2)のみが駆動され、またモータジェネレータMG1,MG2が回生の場合は上アーム(スイッチング素子Q1)のみが駆動されるように制御が実行される。
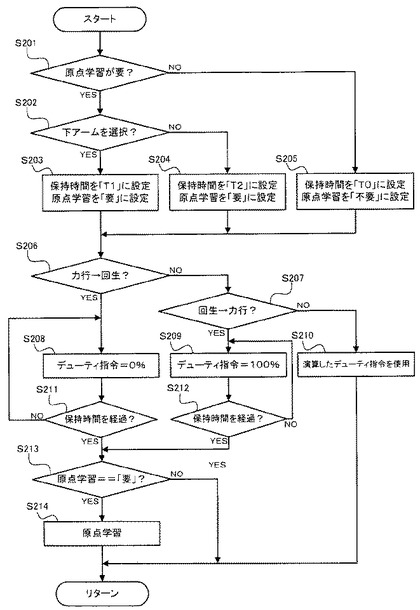
次に、本実施形態に係る電圧変換装置の制御装置による原点学習時の動作について、図4を参照して説明する。ここに図4は、実施形態に係る電圧変換装置の制御装置の原点学習動作を示すフローチャートである。
【0091】
図4において、本実施形態に係る電圧変換装置の制御装置の動作時には、先ず原点学習要否判定部285が、原点学習を行うべきか否かを判定する(ステップS201)。なお、ここでの「原点学習」とは、電流センサ18によって検出されるILの値をより正確なものとするために、原点値保持部290に保持されている原点値を補正する処理のことを指している。
【0092】
原点学習を行うべきであると判定すると(ステップS201:YES)、デューティ指令切替判定部281が、片アーム駆動判定部270において下アームが選択されているか否か(即ち、スイッチング素子Q2がオンとなるよう選択されているか否か)を判定する(ステップS202)。
【0093】
デューティ指令切替保持部282は、片アーム駆動判定部270において下アームが選択されていると判定した場合(ステップS202:YES)、デューティ指令切替部230におけるスイッチ切替制御の保持時間を“T1”に設定すると共に、原点学習フラグを“要”に設定する(ステップS203)。一方で、デューティ指令切替保持部282は、片アーム駆動判定部270において下アームが選択されていない(言い換えれば、上アームが選択されている)と判定した場合(ステップS202:NO)、デューティ指令切替部230におけるスイッチ切替制御の保持時間を“T2”に設定すると共に、原点学習フラグを“要”に設定する(ステップS204)。なお、ここでの保持時間“T1”及び“T2”は、電流センサ18において検出される電流値がゼロにまで減衰するのに要する時間として予め設定されている。
【0094】
他方、原点学習要否判定部285が、原点学習を行うべきでないと判定した場合には(ステップS201:NO)、デューティ指令切替保持部282は、デューティ指令切替部230におけるスイッチ切替制御の保持時間を“T0”に設定すると共に、原点学習フラグを“不要”に設定する(ステップS205)。ここでの保持時間“T0”は、上述した保持時間“T1”及び“T2”とは異なり、上下アームの短絡を防止するための時間として設定されており、典型的にはT1、T2>>T0の関係となる。
【0095】
ステップS203からS205において保持時間及び原点学習フラグが設定されると、デューティ指令切替判定部281は、モータジェネレータMG1,MG2が力行状態から回生状態へと切替えられるか否かを判定する(ステップS206)。またデューティ指令切替判定部281は、モータジェネレータMG1,MG2が力行状態から回生状態へと切替えられないと判定した場合(ステップS206:NO)、モータジェネレータMG1,MG2が回生状態から力行状態へと切替えられるか否かを判定する(ステップS207)。
【0096】
デューティ指令切替保持部282は、上述したステップS206及びS207の判定結果に基づいて、デューティ指令切替部230のスイッチを切替える。具体的には、モータジェネレータMG1,MG2が力行状態から回生状態へと切替えられる場合(ステップS206:YES)、デューティ指令を0%としてデューティ信号DUTYを出力するようにする(ステップS208)。また、モータジェネレータMG1,MG2が回生状態から力行状態へと切替えられる場合(ステップS207:YES)、デューティ指令を100%としてデューティ信号DUTYを出力するようにする(ステップS209)。更に、モータジェネレータMG1,MG2が運転状態の切替えを行わない場合(ステップS207:NO)、電流制御演算部222からのデューティ指令をデューティ信号DUTYとして出力するようにする(ステップS210)。
【0097】
なお、電流制御演算部222からのデューティ指令をデューティ信号DUTYとして出力する場合(即ち、モータジェネレータMG1,MG2が運転状態の切替えを行わない場合)には後述する学習動作は行われずに一連の処理が終了する。
【0098】
他方、デューティ指令を0%としてデューティ信号DUTYを出力した場合、デューティ指令切替保持部282は、出力を開始してから保持時間“T1”又は“T2”が経過したか否かを判定する(ステップS211)。同様に、デューティ指令を100%としてデューティ信号DUTYを出力した場合も、デューティ指令切替保持部282は、出力を開始してから保持時間“T1”又は“T2”が経過したか否かを判定する(ステップS212)。
【0099】
デューティ信号DUTYを切替えて保持時間“T1”又は“T2”が経過すると(ステップS211,S212:YES)、デューティ指令切替保持部282は、原点学習フラグが“要”と設定されているか否かを判定する(ステップS213)。ここで、原点学習フラグが“不要”である場合には(ステップS213:NO)、原点学習動作は省略され一連の処理が終了する。一方で、原点学習フラグが“要”である場合には(ステップS213:YES)、デューティ指令切替保持部282は、原点値保持部290に対して原点学習を行うように指示を出す(ステップS214)。
【0100】
原点学習を行うように指示された原点値保持部290は、その時点で検出されている値を原点値として新たに保持する(即ち、原点値を書き換える)。ここで特に、新たな原点値となる値は、デューティ指令を0%又は100%とした状態(即ち、スイッチング素子Q1,Q2がいずれもオフとされた状態)で保持時間“T1”又は“T2”が経過した際に検出された値であるため、極めてゼロに近い値であると考えられる。よって、このように原点値を補正すれば、例えば温度特性の変化等によって運転中に原点値にずれが生じるような場合であっても、正確に電流値を検出することが可能となる。
【0101】
また、原点学習が行われない場合であっても、アームの切替え時には、一時的にスイッチング素子Q1,Q2がいずれもオフとされた状態となるため、スイッチング素子Q1,Q2の一方をオフとしてから、他方をオンとするまでの期間が短くなる(即ち、スイッチング素子Q1,Q2のオンオフ切替えタイミングが互いに近くなる)ことに起因する、スイッチング素子Q1,Q2の短絡を好適に防止することができる。
【0102】
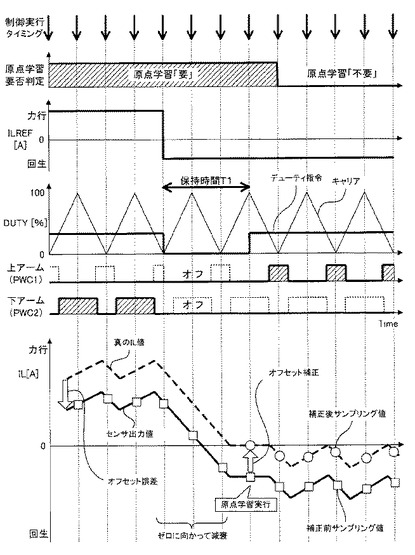
次に、上述した原点学習時の動作について、図5を参照してより具体的に説明する。ここに図5は、実施形態に係る電圧変換装置の制御装置の原点学習時の各種パラメータの変化を示すタイミングチャートである。
【0103】
図5において、モータジェネレータMG1,MG2が力行状態から回生状態へと切替える場合を例にとり考える。なお、図に示すように、チャート開始時点での原点学習フラグは“要”とされているものとし、原点学習の制御実行タイミングはキャリア信号CRの山及び谷であるとする。
【0104】
この場合、モータジェネレータMG1,MG2が力行状態から回生状態へと切替えられるタイミングで、先ずデューティ指令が0%に切替えられる。デューティ指令が0%の状態は、上述したように保持時間“T1”保持される。
【0105】
デューティ指令が0%に切替えられると、スイッチング素子Q1,Q2がいずれもオフとなり、電流センサ18の出力値はゼロに向かって減衰する。なお、この際の減速スピードであるdi/dtの値は、蓄電装置28の出力電圧VB、システム電圧VM、及びリアクトルL1のリアクトル値Lを用いて、以下の数式(1)及び(2)で表すことができる。
【0106】
下アーム選択時:di/dt=(VB−VM)/L ・・・(1)
上アーム選択時:di/dt=VB/L ・・・(2)
よって、上述した数式で表されるdi/dt及びその時点でのILの推測値に基づいて保持時間“T1”及び“T2”を設定すれば、電流値がゼロにまで減衰するまでの時間を正確に推定でき、より好適に原点学習を行える。なお、ILの推測値は、確実に電流値をゼロにまで減衰させるためにも大きめに見積もっておくことが好ましい。但し、大きすぎても不都合が発生するおそれがあるため、例えばコンバータ12の最大定格電流や、補正前の電流センサ18の出力値に最悪誤差量を加味した値を用いればよい。
【0107】
保持時間T1が経過すると、その時点での電流センサ18の出力値がゼロであるとしてオフセット補正(原点学習)が行われる。これにより、補正前の電流センサ18の出力値がオフセット誤差を含んでいたとしても、補正後の電流センサ18の出力値は真のILの値となる。
【0108】
オフセット補正が行われた後には、デューティ指令が元の電流制御演算部222からの値へと戻されることにより、上アームの駆動が開始される。ここで、図を見ても分かるように、下アームがオフとされてから上アームがオンとされるまでには少なくとも保持時間“T1”空くことになるので、スイッチング素子Q1,Q2の短絡を確実に防止することができる。
【0109】
以上説明したように、本実施形態に係る電圧変換装置の制御装置によれば、コンバータ12における2つのスイッチング素子の短絡を防止すると共に、コンバータ12に供給される電流の電流値を正確に検出することが可能である。
【0110】
本発明は、上述した実施形態に限られるものではなく、特許請求の範囲及び明細書全体から読み取れる発明の要旨或いは思想に反しない範囲で適宜変更可能であり、そのような変更を伴う電圧変換装置の制御装置もまた本発明の技術的範囲に含まれるものである。
【符号の説明】
【0111】
12…コンバータ、18…電流センサ、20…直流電圧発生部、22,23…インバータ、28…蓄電装置、30…ECU、40…エンジン、41…動力分割機構、42…駆動輪、45…負荷装置、100…車両、200…電圧指令生成部、210…電圧制御部、211…減算部、212…電圧制御演算部、213…電流指令生成部、220…電流制御部、221…減算部、222…電流制御演算部、230…デューティ指令切替部、235…キャリア比較コンパレータ、240…サンプリングホールド部、245…減算部、250…キャリア信号生成部、260…基準値演算部、270…片アーム駆動判定部、281…デューティ指令切替判定部、282…デューティ指令切替保持部、285…原点学習要否判定部、290…原点値保持部、C2…平滑コンデンサ、D1,D2…ダイオード、L1…リアクトル、MG1,MG2…モータジェネレータ、Q1,Q2…スイッチング素子、SR1,SR2…システムリレー。
【技術分野】
【0001】
本発明は、例えば車両等に搭載される電圧変換装置の制御装置の技術分野に関する。
【背景技術】
【0002】
近年、環境に配慮した車両として、蓄電装置(たとえば二次電池やキャパシタ等)を搭載し、蓄電装置に蓄えられた電力から生じる駆動力を用いて走行する電動車両が注目されている。この電動車両には、たとえば電気自動車、ハイブリッド自動車、燃料電池車などが含まれる。
【0003】
これらの電動車両においては、発進時や加速時に蓄電装置から電力を受けて走行のための駆動力を発生するとともに、制動時に回生制動によって発電を行なって蓄電装置に電気エネルギを蓄えるためのモータジェネレータを備える場合がある。このように、走行状態に応じてモータジェネレータを制御するために、電動車両にはインバータが搭載される。
【0004】
このような車両においては、車両状態によって変動するインバータが利用する電力を安定的に供給するために、蓄電装置とインバータとの間に電圧変換装置(コンバータ)が備えられる場合がある。このコンバータにより、インバータの入力電圧を蓄電装置の出力電圧より高くして、モータの高出力化ができるとともに、同一出力時のモータ電流を低減することで、インバータ及びモータの小型化、低コスト化を図ることができる。
【0005】
上述したコンバータを備える構成では、例えば装置の動作を制御するために、蓄電装置等から入力される電力の電流値を検出する電流センサが設けられる。このような電流センサでは、例えば基準となるオフセット値(即ち、原点)をもとに値を検出するが、原点にずれが発生すると正確な値を検出することが困難となる。このため、例えば特許文献1では、電流を遮断した状態で電流センサのオフセット補正を行うという技術が提案されている。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2006−246564号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
しかしながら、上述した特許文献1に記載の技術では、完全に電流を遮断した状態でしかオフセット補正が行えないため、コンバータの動作中にはオフセット補正は行えない。よって、例えば自動車用途のように運転状態が長時間継続する場合には、オフセット補正を行う機会が起動直後に限られてしまい、定期的にオフセット補正を行うことはできない。このため、例えば運転中の温度特性の変化等に起因して原点のずれが発生してしまうと、運転が終了するまで間違った値が検出され続けてしまうおそれがある。
【0008】
以上のように、上述した特許文献1に記載の技術は、電流センサのオフセット補正の機会が限定されてしまうため、検出値の正確性が著しく低下してしまうおそれがあるという技術的問題点を有している。
【0009】
本発明は、上述した問題点に鑑みなされたものであり、電圧変換装置に供給される電流の電流値を正確に検出することが可能な電圧変換装置の制御装置を提供することを課題とする。
【課題を解決するための手段】
【0010】
本発明の電圧変換装置の制御装置は上記課題を解決するために、互いに直列に接続される第1スイッチング素子及び第2スイッチング素子、並びに前記第1スイッチング素子及び前記第2スイッチング素子に供給される電流の電流値を検出する電流検出手段を備える電圧変換装置の制御装置であって、前記第1スイッチング素子及び前記第2スイッチング素子のデューティ比率に対応するデューティ指令信号を生成するデューティ指令信号生成手段と、前記第1スイッチング素子及び前記第2スイッチング素子のスイッチング周波数に対応するキャリア信号を生成するキャリア信号生成手段と、前記デューティ指令信号及び前記キャリア信号を互いに比較することで、前記第1スイッチング素子及び前記第2スイッチング素子の各々のオンオフを切替えるスイッチング制御信号を夫々生成するスイッチング制御信号生成手段と、前記第1スイッチング素子及び前記第2スイッチング素子を択一的にオンとするように前記スイッチング制御信号生成手段を制御することで、前記第1スイッチング素子を含んでなる第1アーム及び前記第2スイッチング素子を含んでなる第2アームのいずれか一方のみによる片アーム駆動を実現する片アーム駆動制御手段と、前記第1アームによる片アーム駆動及び前記第2アームによる片アーム駆動を相互に切替える際に、前記第1スイッチング素子及び前記第2スイッチング素子がいずれもオフとなるデューティ指令信号を所定期間生成するようにデューティ指令信号生成手段を制御するデューティ制御手段と、前記所定期間内に前記電流検出手段で検出された電流値をオフセット原点として学習させる原点学習手段とを備える。
【0011】
本発明に係る電圧変換装置は、例えば車両に搭載されるコンバータであり、互いに直列に接続される第1スイッチング素子及び第2スイッチング素子を備えている。第1スイッチング素子及び第2スイッチング素子としては、例えばIGBT(Insulated Gate Bipolar Transistor)、電力用MOS(Metal Oxide Semiconductor)トランジスタ、或いは電力用バイポーラトランジスタ等を用いることができる。
【0012】
なお、第1スイッチング素子及び第2スイッチング素子の各々には、例えばダイオードが並列に接続されており、それぞれ第1アーム及び第2アームを形成している。即ち、第1スイッチング素子は第1アームを形成しており、そのスイッチング動作によって、第1アームにおける駆動のオンオフを切替えることができる。同様に、第2スイッチング素子は第2アームを形成しており、そのスイッチング動作によって、第2アームにおける駆動のオンオフを切替えることができる。
【0013】
本発明に係る電圧変換装置は更に、第1スイッチング素子及び第2スイッチング素子に供給される電流の電流値を検出する電流検出手段を備えている。電流検出手段は、例えば第1スイッチング素子及び第2スイッチング素子に電流を供給する経路に配置されたリアクトルの前段部分に設けられる。電流検出手段は、予め設定されたオフセット原点と検出された値との差に基づいて電流値を検出する。
【0014】
本発明に係る電圧変換装置の制御装置は、上述した電圧変換装置の動作を制御する装置であって、例えば、一又は複数のCPU(Central Processing Unit)、MPU(Micro Processing Unit)、各種プロセッサ又は各種コントローラ、或いは更にROM(Read Only Memory)、RAM(Random Access Memory)、バッファメモリ又はフラッシュメモリ等の各種記憶手段等を適宜に含み得る、単体の或いは複数のECU(Electronic Controlled Unit)等の各種処理ユニット、各種コントローラ或いはマイコン装置等各種コンピュータシステム等の形態を採り得る。
【0015】
本発明に係る電圧変換装置の制御装置の動作時には、デューティ指令信号生成手段によって、第1スイッチング素子及び第2スイッチング素子のデューティ比率に対応するデューティ指令信号が生成される。デューティ指令信号は、例えば出力すべき電圧値や電流値等に基づいて決定される。
【0016】
また本発明に係る電圧変換装置の制御装置の動作時には、キャリア信号生成手段によって、第1スイッチング素子及び第2スイッチング素子のスイッチング周波数に対応するキャリア信号が生成される。キャリア信号は、予め設定された周波数を有する信号として生成される。
【0017】
デューティ指令信号及びキャリア信号は、スイッチング制御信号生成手段によって互いに比較され、その結果として、第1スイッチング素子及び第2スイッチング素子の各々のオンオフを切替えるスイッチング制御信号が夫々生成される。スイッチング制御信号は、第1スイッチング素子及び第2スイッチング素子に供給される。これにより、電圧変換装置の第1アーム及び第2アームの駆動が制御されることになる。
【0018】
上述したスイッチング制御信号生成手段は、片アーム駆動制御手段によって、第1スイッチング素子及び第2スイッチング素子を択一的にオンとするように制御される場合がある。このような制御によれば、第1スイッチング素子を含んでなる第1アーム及び第2スイッチング素子を含んでなる第2アームのいずれか一方のみによる片アーム駆動が実現される。
【0019】
片アーム駆動制御手段は、第1スイッチング素子を含んでなる第1アーム及び第2スイッチング素子を選択する際に、例えば出力すべき電圧値や電流値等に基づいて、第1アーム及び第2アームのいずれのアームで片アーム駆動を行うべきか判定する。より具体的には、片アーム駆動制御手段は、例えば電圧変換装置に接続されるモータジェネレータが回生動作を行う場合に、第1アームによる片アーム駆動を行うようにし、力行動作を行う場合に、第2アームによる片アーム駆動を行うようにする。このように、片アーム駆動制御手段は、第1アームによる片アーム駆動及び第1アームによる片アーム駆動を適宜切替えるように制御する。
【0020】
ここで本発明では特に、第1アームによる片アーム駆動及び第2アームによる片アーム駆動を相互に切替える際に、デューティ制御手段によって、第1スイッチング素子及び第2スイッチング素子がいずれもオフとなるデューティ指令信号(例えば、デューティ比率が100%又は0%である信号)を所定期間生成するようにデューティ指令信号生成手段が制御される。なお、ここでの「所定期間」とは、後述する電流検出手段の原点学習において、電流検出手段で検出される電流の電流値が十分なまでに低くなる(好適にはゼロとなる)のに要する期間であり、予め理論的、実験的或いは経験的に求められ設定されている。
【0021】
本発明では更に、第1スイッチング素子及び第2スイッチング素子がいずれもオフとなるデューティ指令信号が生成される所定期間内に、原点学習手段によって、電流検出手段で検出された電流値がオフセット原点として学習させられる。即ち、原点学習手段は、それまで記憶していたオフセット原点を、所定期間内に得られた値へと置き換えるような補正を行う。
【0022】
上述したように、第1スイッチング素子及び第2スイッチング素子がいずれもオフとなるように制御されると、その間、電流検出手段で検出される値はゼロに向かって減衰する。よって、所定期間内(好適には所定期間の終了直前)に検出された値をオフセット原点とすれば、電流検出手段において検出される電流値の正確性を高めることができる。より具体的には、例えば温度特性の変化等に起因して変化したオフセット原点の値を、アーム切替えの度に正確な値へと更新することができる。
【0023】
なお、原点学習はアーム切替えの度に常に行われずともよく、オフセット原点が変化したおそれがある場合(例えば、前回の学習から所定時間が経過した場合や、前回の学習から環境温度が所定値変化した場合)に行われればよい。
【0024】
また、アーム切替えの際に、上述した第1スイッチング素子及び第2スイッチング素子がいずれもオフとなる所定期間を設けることで、第1スイッチング素子及び第2スイッチング素子の一方をオフとしてから、他方をオンとするまでの期間が短くなる(即ち、第1スイッチング素子及び第2スイッチング素子のスイッチングのタイミングが互いに近くなる)ことに起因する、第1スイッチング素子及び第2スイッチング素子の短絡を好適に防止することができる。
【0025】
以上説明したように、本発明に係る電圧変換装置の制御装置によれば、電圧変換装置における2つのスイッチング素子の短絡を防止すると共に、電圧変換装置に供給される電流の電流値を正確に検出することが可能である。
【0026】
本発明の作用及び他の利得は次に説明する発明を実施するための形態から明らかにされる。
【図面の簡単な説明】
【0027】
【図1】実施形態に係る電圧変換装置の制御装置が搭載される車両の全体構成を示す概略図である。
【図2】実施形態に係るECUの構成を示すブロック図である。
【図3】実施形態に係る電圧変換装置の制御装置の全体動作を示すフローチャートである。
【図4】実施形態に係る電圧変換装置の制御装置の原点学習動作を示すフローチャートである。
【図5】実施形態に係る電圧変換装置の制御装置の原点学習時の各種パラメータの変化を示すタイミングチャートである。
【発明を実施するための形態】
【0028】
以下では、本発明の実施形態について図を参照しつつ説明する。
【0029】
先ず、本実施形態に係る電圧変換装置の制御装置が搭載される車両の全体構成について、図1を参照して説明する。ここに図1は、本実施形態に係る電圧変換装置の制御装置が搭載される車両の全体構成を示す概略図である。
【0030】
図1において、本実施形態に係る電圧変換装置の制御装置が搭載される車両100は、エンジン40及びモータジェネレータMG1及びMG2を動力源とするハイブリッド車両として構成されている。但し、車両100の構成はこれに限定されるものではなく、蓄電装置からの電力によって走行可能な車両(例えば、電気自動車や燃料電池自動車)等にも適用可能である。また、本実施形態では、電圧変換装置の制御装置が車両100に搭載される構成について説明するが、車両以外でも交流電動機により駆動される機器であれば適用が可能である。
【0031】
車両100は、直流電圧発生部20と、負荷装置45と、平滑コンデンサC2と、ECU30とを備えて構成されている。
【0032】
直流電圧発生部20は、蓄電装置28と、システムリレーSR1,SR2と、平滑コンデンサC1と、コンバータ12とを含む。
【0033】
蓄電装置28は、例えばニッケル水素又はリチウムイオン等の二次電池や、電気二重層キャパシタ等の蓄電装置を含んで構成される。また、蓄電装置28が出力する直流電圧VB及び入出力される直流電流IBは、電圧センサ10及び電流センサ11によってそれぞれ検出される。そして、電圧センサ10及び電流センサ11は、検出した直流電圧VB及び直流電流IBの検出値をECU30に出力する。
【0034】
システムリレーSR1は、蓄電装置28の正極端子及び電力線PL1の間に接続され、システムリレーSR2は、蓄電装置28の負極端子及び接地線NLの間に接続される。システムリレーSR1,SR2は、ECU30からの信号SEにより制御され、蓄電装置28からコンバータ12への電力の供給と遮断とを切替える。
【0035】
コンバータ12は、本発明の「電圧変換装置」の一例であり、リアクトルL1と、スイッチング素子Q1,Q2と、ダイオードD1,D2とを含む。スイッチング素子Q1及びQ2は、本発明の「第1スイッチング素子」及び「第2スイッチング素子」の一例であり、電力線PL2及び接地線NLの間に直列に接続される。スイッチング素子Q1及びQ2は、ECU30からのスイッチング制御信号PWCによって制御される。
【0036】
スイッチング素子Q1及びQ2には、例えばIGBT、電力用MOSトランジスタあるいは、電力用バイポーラトランジスタ等を用いることができる。スイッチング素子Q1,Q2に対しては、逆並列ダイオードD1,D2が配置される。リアクトルL1は、スイッチング素子Q1及びQ2の接続ノードと電力線PL1の間に設けられる。また、平滑コンデンサC2は、電力線PL2及び接地線NLの間に接続される。
【0037】
電流センサ18は、本発明の「電流検出手段」の一例であり、リアクトルL1を流れるリアクトル電流を検出し、その検出値ILをECU30に出力する。
【0038】
負荷装置45は、インバータ23と、モータジェネレータMG1,MG2と、エンジン40と、動力分割機構41と、駆動輪42とを含む。また、インバータ23は、モータジェネレータMG1を駆動するためのインバータ14と、モータジェネレータMG2を駆動するためのインバータ22とを含む。なお、図1のようにインバータ及びモータジェネレータを2組備えることは必須ではなく、たとえばインバータ14とモータジェネレータMG1、あるいはインバータ22とモータジェネレータMG2のいずれか1組のみを備える構成としてもよい。
【0039】
モータジェネレータMG1,MG2は、インバータ23から供給される交流電力を受けて車両推進のための回転駆動力を発生する。また、モータジェネレータMG1,MG2は、外部から回転力を受け、ECU30からの回生トルク指令によって交流電力を発電するとともに回生制動力を車両100に発生する。
【0040】
また、モータジェネレータMG1,MG2は、動力分割機構41を介してエンジン40にも連結される。そして、エンジン40の発生する駆動力とモータジェネレータMG1,MG2の発生する駆動力とが最適な比率となるように制御される。また、モータジェネレータMG1,MG2のいずれか一方を専ら電動機として機能させ、他方のモータジェネレータを専ら発電機として機能させてもよい。なお、本実施形態においては、モータジェネレータMG1をエンジン40により駆動される発電機として機能させ、モータジェネレータMG2を駆動輪42を駆動する電動機として機能させるものとする。
【0041】
動力分割機構41には、エンジン40の動力を、駆動輪42とモータジェネレータMG1との両方に振り分けるために、例えば遊星歯車機構(プラネタリギヤ)が使用される。
【0042】
インバータ14は、コンバータ12から昇圧された電圧を受けて、たとえばエンジン40を始動させるためにモータジェネレータMG1を駆動する。また、インバータ14は、エンジン40から伝達される機械的動力によってモータジェネレータMG1で発電された回生電力をコンバータ12に出力する。このときコンバータ12は、降圧回路として動作するようにECU30によって制御される。
【0043】
インバータ14は、電力線PL2及び接地線NLの間に並列に設けられ、U相上下アーム15と、V相上下アーム16と、W相上下アーム17を含んで構成される。各相上下アームは、電力線PL2及び接地線NLの間に直列接続されたスイッチング素子から構成される。たとえば、U相上下アーム15は、スイッチング素子Q3,Q4から成り、V相上下アーム16は、スイッチング素子Q5,Q6から成り、W相上下アーム17は、スイッチング素子Q7,Q8から成る。また、スイッチング素子Q3〜Q8に対して、逆並列ダイオードD3〜D8がそれぞれ接続される。スイッチング素子Q3〜Q8は、ECU30からのスイッチング制御信号PWIによって制御される。
【0044】
例えばモータジェネレータMG1は、3相の永久磁石型同期電動機であり、U,V,W相の3つのコイルの一端が中性点に共通接続される。さらに、各相コイルの他端は、各相上下アーム15〜17のスイッチング素子の接続ノードと接続される。
【0045】
インバータ22は、コンバータ12に対してインバータ14と並列的に接続される。
【0046】
インバータ22は駆動輪42を駆動するモータジェネレータMG2に対してコンバータ12の出力する直流電圧を三相交流に変換して出力する。またインバータ22は、回生制動に伴い、モータジェネレータMG2において発電された回生電力をコンバータ12に出力する。このときコンバータ12は降圧回路として動作するようにECU30によって制御される。インバータ22の内部の構成は、図示しないがインバータ14と同様であり、詳細な説明については省略する。
【0047】
コンバータ12は、基本的には、各スイッチング周期内でスイッチング素子Q1及びQ2が相補的かつ交互にオンオフするように制御される。コンバータ12は、昇圧動作時には、蓄電装置28から供給された直流電圧VBを直流電圧VM(インバータ14への入力電圧に相当するこの直流電圧を、以下「システム電圧」とも称する)に昇圧する。この昇圧動作は、スイッチング素子Q2のオン期間にリアクトルL1に蓄積された電磁エネルギを、スイッチング素子Q1及び逆並列ダイオードD1を介して、電力線PL2へ供給することにより行われる。
【0048】
また、コンバータ12は、降圧動作時には、直流電圧VMを直流電圧VBに降圧する。この降圧動作は、スイッチング素子Q1のオン期間にリアクトルL1に蓄積された電磁エネルギを、スイッチング素子Q2及び逆並列ダイオードD2を介して、接地線NLへ供給することにより行われる。
【0049】
これらの昇圧動作及び降圧動作における電圧変換比(VM及びVBの比)は、上記スイッチング周期におけるスイッチング素子Q1,Q2のオン期間比(デューティ比)により制御される。なお、スイッチング素子Q1及びQ2をオン及びオフにそれぞれ固定すれば、VM=VB(電圧変換比=1.0)とすることもできる。
【0050】
平滑コンデンサC2は、コンバータ12からの直流電圧を平滑化し、その平滑化した直流電圧をインバータ23へ供給する。電圧センサ13は、平滑コンデンサC2の両端の電圧、すなわち、システム電圧VMを検出し、その検出値をECU30へ出力する。
【0051】
インバータ14は、モータジェネレータMG1のトルク指令値が正(TR1>0)の場合には、平滑コンデンサC2から直流電圧が供給されるとECU30からのスイッチング制御信号PWI1に応答した、スイッチング素子Q3〜Q8のスイッチング動作により直流電圧を交流電圧に変換して正のトルクを出力するようにモータジェネレータMG1を駆動する。また、インバータ14は、モータジェネレータMG1のトルク指令値が零の場合(TR1=0)には、スイッチング制御信号PWI1に応答したスイッチング動作により、直流電圧を交流電圧に変換してトルクが零になるようにモータジェネレータMG1を駆動する。これにより、モータジェネレータMG1は、トルク指令値TR1によって指定された零または正のトルクを発生するように駆動される。
【0052】
更に、車両100の回生制動時には、モータジェネレータMG1のトルク指令値TR1は負に設定される(TR1<0)。この場合には、インバータ14は、スイッチング制御信号PWI1に応答したスイッチング動作により、モータジェネレータMG1が発電した交流電圧を直流電圧に変換し、その変換した直流電圧(システム電圧)を、平滑コンデンサC2を介してコンバータ12へ供給する。なお、ここで言う回生制動とは、電動車両を運転するドライバーによるフットブレーキ操作があった場合の回生発電を伴う制動や、フットブレーキを操作しないものの、走行中にアクセルペダルをオフすることで回生発電をさせながら車両を減速(または加速の中止)させることを含む。
【0053】
インバータ22についても同様に、モータジェネレータMG2のトルク指令値に対応したECU30からのスイッチング制御信号PWI2を受け、スイッチング制御信号PWI2応答したスイッチング動作によって、直流電圧を交流電圧に変換して所定のトルクになるようにモータジェネレータMG2を駆動する。
【0054】
電流センサ24,25は、モータジェネレータMG1,MG2に流れるモータ電流MCRT1,MCRT2を検出し、その検出したモータ電流をECU30へ出力する。なお、U相,V相,W相の各相の電流の瞬時値の和はゼロであるので、図1に示すように電流センサ24,25は2相分のモータ電流を検出するように配置すれば足りる。
【0055】
回転角センサ(レゾルバ)26,27は、モータジェネレータMG1,MG2の回転角θ1,θ2を検出し、その検出した回転角θ1,θ2をECU30へ送出する。ECU30では、回転角θ1,θ2に基づきモータジェネレータMG1,MG2の回転速度MRN1,MRN2及び角速度ω1,ω2(rad/s)を算出できる。なお、回転角センサ26,27については、回転角θ1,θ2をECU30にてモータ電圧や電流から直接演算することによって、配置しないようにしてもよい。
【0056】
ECU30は、本発明の「電圧変換装置の制御装置」の一例であり、いずれも図示しないがCPU(Central Processing Unit)、記憶装置及び入出力バッファを含み、車両100の各機器を制御する。なお、これらの制御については、ソフトウェアによる処理に限られず、専用のハードウェア(電子回路)で構築して処理することも可能である。
【0057】
代表的な機能として、ECU30は、入力されたトルク指令値TR1,TR2、電圧センサ10によって検出された直流電圧VB、電流センサ11によって検出された直流電流IB、電圧センサ13によって検出されたシステム電圧VM及び電流センサ24,25からのモータ電流MCRT1,MCRT2、回転角センサ26,27からの回転角θ1,θ2等に基づいて、モータジェネレータMG1,MG2がトルク指令値TR1,TR2に従ったトルクを出力するように、コンバータ12及びインバータ23の動作を制御する。すなわち、コンバータ12及びインバータ23を上記のように制御するためのスイッチング制御信号PWC,PWI1,PWI2を生成して、コンバータ12及びインバータ23へそれぞれ出力する。
【0058】
コンバータ12の昇圧動作時には、ECU30は、システム電圧VMをフィードバック制御し、システム電圧VMが電圧指令値に一致するようにスイッチング制御信号PWCを生成する。
【0059】
また、ECU30は、車両100が回生制動モードに入ると、モータジェネレータMG1,MG2で発電された交流電圧を直流電圧に変換するようにスイッチング制御信号PWI1、PWI2を生成してインバータ23へ出力する。これにより、インバータ23は、モータジェネレータMG1,MG2で発電された交流電圧を直流電圧に変換してコンバータ12へ供給する。
【0060】
さらに、ECU30は、車両100が回生制動モードに入ると、インバータ23から供給された直流電圧を降圧するようにスイッチング制御信号PWCを生成し、コンバータ12へ出力する。これにより、モータジェネレータMG1,MG2が発電した交流電圧は、直流電圧に変換され、さらに降圧されて蓄電装置28に供給される。
【0061】
次に、本実施形態に係る電圧変換装置の制御装置であるECU30の具体的な構成について、図2を参照して説明する。ここに図2は、本実施形態に係るECUの構成を示すブロック図である。
【0062】
図2において、本実施形態に係るECU30は、電圧指令生成部200と、電圧制御部210と、デューティ指令切替部230と、キャリア比較コンパレータ250と、サンプリングホールド部240と、キャリア信号生成部250と、基準値演算部260と、片アーム駆動判定部270と、デューティ指令切替判定部281と、デューティ指令切替保持部282と、原点学習要否判定部285と、原点値保持部290とを備えて構成されている。
【0063】
電圧指令生成部200は、モータジェネレータMG1,MG2への要求トルクTR1,TR2と、モータジェネレータMG1,MG2の回転速度MRN1,MRN2の入力を受ける。そして、これらの情報に基づいて、電圧指令生成部200は、コンバータ12の出力電圧(すなわち、インバータ14の入力電圧)の電圧指令VREFを生成する。
【0064】
電圧制御部210は、本発明の「デューティ指令信号生成手段」の一例であり、減算部211及び電圧制御演算部212を含む電流指令生成部213と、減算部221及び電流制御演算部222を含む電流制御部220とを備えて構成されている。
【0065】
電流指令生成部213における減算部211は、電圧指令生成部200から入力を受ける電圧指令VREFと、電圧センサ13により検出されたコンバータ12のシステム電圧のフィードバック値VMとの電圧偏差を演算し、演算結果を電圧制御演算部212に出力する。
【0066】
電圧制御演算部212は、減算部211によって演算された電圧偏差をPI演算することによって、リアクトルL1に流れるリアクトル電流指令値ILREFを演算する。
【0067】
このように、電流指令生成部213においては、コンバータ12のシステム電圧のフィードバック制御を行うことによって、リアクトル電流指令値ILREFを演算する。
【0068】
そして、電圧制御演算部212は、このリアクトル電流指令値ILREFを、電流制御部220、片アーム駆動判定部270及びデューティ指令切替判定部281へ出力する。
【0069】
電流制御部220における減算部221は、電圧制御演算部212からのリアクトル電流指令値ILREFと、サンプリングホールド部240によって、スイッチング周期ごとに検出値がホールドされたリアクトル電流ILのフィードバック値との電流偏差を演算し、電流制御演算部222に出力する。
【0070】
電流制御演算部222は、減算部221により演算された電流偏差をPI演算することによって、スイッチング素子Q1,Q2のデューティを演算する。なお、電流制御演算部222は、後述する片アーム駆動判定部270からの選択フラグSELによって、スイッチング素子Q1またはQ2の片アーム駆動制御が選択された場合には、選択された側のスイッチング素子のみによって、リアクトル電流指令値ILREFが出力されるようにデューティを演算する。
【0071】
デューティ指令切替部230は、本発明の「デューティ制御手段」の一例であり、電流制御演算部222からのデューティ、デューティ比率が100%とされた所定のデューティ及びデューティ比率が0%とされた所定のデューティからいずれか1つを選択して、キャリア比較コンパレータ235にデューティ信号DUTYを出力する。
【0072】
キャリア比較コンパレータ235は、本発明の「スイッチング制御信号生成手段」の一例であり、デューティ信号DUTYと、キャリア信号生成部250からの搬送波CRとの比較に基づいて、コンバータ12の各相の上下アームのスイッチング素子Q1,Q2のオンオフを制御するスイッチング制御信号PWCを生成する。このとき、キャリア比較コンパレータ235は、片アーム駆動判定部270からの選択フラグSELに従って、駆動するスイッチング素子Q1,Q2を選択する。
【0073】
このスイッチング制御信号PWCによって、モータジェネレータMG1,MG2が力行の場合は、蓄電装置28からの出力電圧を所望のインバータ23の入力電圧まで昇圧する。また、モータジェネレータMG1,MG2が回生の場合は、モータジェネレータMG1,MG2により発電されインバータ23によって変換された直流電力を、蓄電装置28が充電可能な電圧まで降圧する。
【0074】
キャリア信号生成部250は、本発明の「キャリア信号生成手段」の一例であり、キャリア周波数指令に応じた周波数のキャリア信号CRを、キャリア比較コンパレータ235に出力する。また、キャリア信号生成部250は、サンプリングホールド部240に、キャリア信号CRの1周期ごとにサンプリング信号SMPを出力する。サンプリングホールド部240は、各サンプリング信号SMP入力時に、電流センサ18により検出されたリアクトル電流ILを検出して保持し、その検出した電流値を減算部245に出力する。
【0075】
原点値保持部290は、オフセットにより正確な電流値を検出するための原点値を保持しており、減算部245に原点値を出力する。減算部245は、サンプリングホールド部245から入力される値に対して、原点値保持部290から入力される原点値による減算処理を行い、演算結果として得られる値を減算部221へと出力する。なお、原点値保持部290に保持されている原点値は、後述する学習動作によって書き換え可能とされている。
【0076】
基準値演算部260は、蓄電装置28の出力電圧VBと、システム電圧VMの入力を受ける。そして、これらの情報から、搬送波CRの1周期中にリアクトル電流ILの方向が正から負、または負から正に切替わる状態となる電流基準値IL1を演算して、片アーム駆動判定部270へ出力する。
【0077】
片アーム駆動判定部270は、電圧制御演算部212からのリアクトル電流指令値ILREFと、基準値演算部260からの電流基準値IL1との入力を受ける。片アーム駆動判定部270は、これらの情報に基づいて、駆動するスイッチング素子の選択を行う。そして、片アーム駆動判定部270は、選択結果である選択フラグSELをキャリア比較コンパレータ235へ出力する。
【0078】
デューティ指令切替判定部281は、電圧制御演算部212からのリアクトル電流指令値ILREFを入力として受け、デューティ指令切替部230におけるスイッチをいずれに切替えるかを判定する。即ち、デューティ指令切替部230から、電流制御演算部222からのデューティ、デューティ比率が100%とされた所定のデューティ及びデューティ比率が0%とされた所定のデューティのいずれをデューティ信号DUTYとして出力させるかを判定する。デューティ指令切替部230における判定結果は、デューティ指令切替保持部282に出力される。
【0079】
原点学習要否判定部285は、原点保持部290に保持されている原点値が正確でないと推測される場合に、原点学習を行うべきであると判定する。原点学習要否判定部285は、例えば前回の学習時から所定時間が経過した場合や、環境温度が所定値以上変化した場合に原点学習を行うべきであると判定する。原点学習要否判定部285における判定結果は、デューティ指令切替保持部282に出力される。
【0080】
デューティ指令切替保持部282は、上述したデューティ指令切替部230における判定結果及び原点学習要否判定部285における判定結果を入力として受け、これら判定結果に基づいて、デューティ指令切替部230におけるスイッチ切替制御及び原点値保持部290における原点値の学習を実行させる。即ち、ここでのデューティ指令切替保持部282は、本発明の「原点学習手段」の一例である。デューティ指令切替保持部282の詳細な動作については後に詳述する。
【0081】
上述した各部位を含んで構成されたECU30は、一体的に構成された電子制御ユニットであり、上記各部位に係る動作は、全てECU30によって実行されるように構成されている。但し、本発明に係る上記部位の物理的、機械的及び電気的な構成はこれに限定されるものではなく、例えばこれら各部位は、複数のECU、各種処理ユニット、各種コントローラ或いはマイコン装置等各種コンピュータシステム等として構成されていてもよい。
【0082】
次に、本実施形態に係る電圧変換装置の制御装置の動作について、図3を参照して説明する。ここに図3は、本実施形態に係る電圧変換装置の制御装置の全体動作を示すフローチャートである。なお、図3に示されるフローチャート中の各ステップは、説明の便宜上、デューティ指令切替時の処理及び原点学習時の処理を除いたものとなっている。これら除外された処理については後に図4を参照して説明するものとし、ここでは装置の全体的な処理の流れについて説明する。
【0083】
図3において、本実施形態に係る電圧変換装置の制御装置の動作時には、ECU30は、電圧指令生成部200によって電圧指令VREFを演算する(ステップS101)。
【0084】
続いて、ECU30は、電圧制御演算部212によってリアクトル電流指令値ILREFを演算する(ステップS102)。
【0085】
次に、ECU30は、リアクトル電流指令ILREFが正か否か、すなわちモータジェネレータMG1,MG2が力行状態で制御されるか否かを判定する(ステップS103)。
【0086】
ここで、リアクトル電流指令ILREFが正の場合(ステップS103:YES)、ECU30は、下アームであるスイッチング素子Q2の片アーム駆動制御を行うように、片アーム駆動判定部270によって設定する(ステップS104)。
【0087】
一方、リアクトル電流指令ILREFがゼロまたは負の場合(ステップS103:NO)、モータジェネレータMG1,MG2が回生状態で制御されるので、ECU30は、上アームであるスイッチング素子Q1の片アーム駆動制御を行うように設定する(ステップS105)。なお、リアクトル電流指令ILREFがゼロの場合には、コンバータ12よる電圧変換は行われないので、実際には上下アームとも駆動されない。
【0088】
次に、ECU30は、ステップS104又はステップS105で設定された駆動アームと、リアクトル電流指令値ILREFに基づいて、電流制御演算部222によって、スイッチング素子Q1,Q2のデューティを演算する(ステップS106)。
【0089】
そして、ECU30は、スイッチング素子Q1,Q2のデューティDUTYとキャリア信号CRとの比較に基づいて、キャリア比較コンパレータ235によってコンバータ12のスイッチング素子Q1,Q2を駆動するスイッチング制御信号PWC1及びPWC2を生成し、コンバータ12に出力する。
【0090】
以上のような処理によって生成されたスイッチング制御信号PWCに従いコンバータ12が制御されることによって、モータジェネレータMG1,MG2が力行の場合は下アーム(スイッチング素子Q2)のみが駆動され、またモータジェネレータMG1,MG2が回生の場合は上アーム(スイッチング素子Q1)のみが駆動されるように制御が実行される。
次に、本実施形態に係る電圧変換装置の制御装置による原点学習時の動作について、図4を参照して説明する。ここに図4は、実施形態に係る電圧変換装置の制御装置の原点学習動作を示すフローチャートである。
【0091】
図4において、本実施形態に係る電圧変換装置の制御装置の動作時には、先ず原点学習要否判定部285が、原点学習を行うべきか否かを判定する(ステップS201)。なお、ここでの「原点学習」とは、電流センサ18によって検出されるILの値をより正確なものとするために、原点値保持部290に保持されている原点値を補正する処理のことを指している。
【0092】
原点学習を行うべきであると判定すると(ステップS201:YES)、デューティ指令切替判定部281が、片アーム駆動判定部270において下アームが選択されているか否か(即ち、スイッチング素子Q2がオンとなるよう選択されているか否か)を判定する(ステップS202)。
【0093】
デューティ指令切替保持部282は、片アーム駆動判定部270において下アームが選択されていると判定した場合(ステップS202:YES)、デューティ指令切替部230におけるスイッチ切替制御の保持時間を“T1”に設定すると共に、原点学習フラグを“要”に設定する(ステップS203)。一方で、デューティ指令切替保持部282は、片アーム駆動判定部270において下アームが選択されていない(言い換えれば、上アームが選択されている)と判定した場合(ステップS202:NO)、デューティ指令切替部230におけるスイッチ切替制御の保持時間を“T2”に設定すると共に、原点学習フラグを“要”に設定する(ステップS204)。なお、ここでの保持時間“T1”及び“T2”は、電流センサ18において検出される電流値がゼロにまで減衰するのに要する時間として予め設定されている。
【0094】
他方、原点学習要否判定部285が、原点学習を行うべきでないと判定した場合には(ステップS201:NO)、デューティ指令切替保持部282は、デューティ指令切替部230におけるスイッチ切替制御の保持時間を“T0”に設定すると共に、原点学習フラグを“不要”に設定する(ステップS205)。ここでの保持時間“T0”は、上述した保持時間“T1”及び“T2”とは異なり、上下アームの短絡を防止するための時間として設定されており、典型的にはT1、T2>>T0の関係となる。
【0095】
ステップS203からS205において保持時間及び原点学習フラグが設定されると、デューティ指令切替判定部281は、モータジェネレータMG1,MG2が力行状態から回生状態へと切替えられるか否かを判定する(ステップS206)。またデューティ指令切替判定部281は、モータジェネレータMG1,MG2が力行状態から回生状態へと切替えられないと判定した場合(ステップS206:NO)、モータジェネレータMG1,MG2が回生状態から力行状態へと切替えられるか否かを判定する(ステップS207)。
【0096】
デューティ指令切替保持部282は、上述したステップS206及びS207の判定結果に基づいて、デューティ指令切替部230のスイッチを切替える。具体的には、モータジェネレータMG1,MG2が力行状態から回生状態へと切替えられる場合(ステップS206:YES)、デューティ指令を0%としてデューティ信号DUTYを出力するようにする(ステップS208)。また、モータジェネレータMG1,MG2が回生状態から力行状態へと切替えられる場合(ステップS207:YES)、デューティ指令を100%としてデューティ信号DUTYを出力するようにする(ステップS209)。更に、モータジェネレータMG1,MG2が運転状態の切替えを行わない場合(ステップS207:NO)、電流制御演算部222からのデューティ指令をデューティ信号DUTYとして出力するようにする(ステップS210)。
【0097】
なお、電流制御演算部222からのデューティ指令をデューティ信号DUTYとして出力する場合(即ち、モータジェネレータMG1,MG2が運転状態の切替えを行わない場合)には後述する学習動作は行われずに一連の処理が終了する。
【0098】
他方、デューティ指令を0%としてデューティ信号DUTYを出力した場合、デューティ指令切替保持部282は、出力を開始してから保持時間“T1”又は“T2”が経過したか否かを判定する(ステップS211)。同様に、デューティ指令を100%としてデューティ信号DUTYを出力した場合も、デューティ指令切替保持部282は、出力を開始してから保持時間“T1”又は“T2”が経過したか否かを判定する(ステップS212)。
【0099】
デューティ信号DUTYを切替えて保持時間“T1”又は“T2”が経過すると(ステップS211,S212:YES)、デューティ指令切替保持部282は、原点学習フラグが“要”と設定されているか否かを判定する(ステップS213)。ここで、原点学習フラグが“不要”である場合には(ステップS213:NO)、原点学習動作は省略され一連の処理が終了する。一方で、原点学習フラグが“要”である場合には(ステップS213:YES)、デューティ指令切替保持部282は、原点値保持部290に対して原点学習を行うように指示を出す(ステップS214)。
【0100】
原点学習を行うように指示された原点値保持部290は、その時点で検出されている値を原点値として新たに保持する(即ち、原点値を書き換える)。ここで特に、新たな原点値となる値は、デューティ指令を0%又は100%とした状態(即ち、スイッチング素子Q1,Q2がいずれもオフとされた状態)で保持時間“T1”又は“T2”が経過した際に検出された値であるため、極めてゼロに近い値であると考えられる。よって、このように原点値を補正すれば、例えば温度特性の変化等によって運転中に原点値にずれが生じるような場合であっても、正確に電流値を検出することが可能となる。
【0101】
また、原点学習が行われない場合であっても、アームの切替え時には、一時的にスイッチング素子Q1,Q2がいずれもオフとされた状態となるため、スイッチング素子Q1,Q2の一方をオフとしてから、他方をオンとするまでの期間が短くなる(即ち、スイッチング素子Q1,Q2のオンオフ切替えタイミングが互いに近くなる)ことに起因する、スイッチング素子Q1,Q2の短絡を好適に防止することができる。
【0102】
次に、上述した原点学習時の動作について、図5を参照してより具体的に説明する。ここに図5は、実施形態に係る電圧変換装置の制御装置の原点学習時の各種パラメータの変化を示すタイミングチャートである。
【0103】
図5において、モータジェネレータMG1,MG2が力行状態から回生状態へと切替える場合を例にとり考える。なお、図に示すように、チャート開始時点での原点学習フラグは“要”とされているものとし、原点学習の制御実行タイミングはキャリア信号CRの山及び谷であるとする。
【0104】
この場合、モータジェネレータMG1,MG2が力行状態から回生状態へと切替えられるタイミングで、先ずデューティ指令が0%に切替えられる。デューティ指令が0%の状態は、上述したように保持時間“T1”保持される。
【0105】
デューティ指令が0%に切替えられると、スイッチング素子Q1,Q2がいずれもオフとなり、電流センサ18の出力値はゼロに向かって減衰する。なお、この際の減速スピードであるdi/dtの値は、蓄電装置28の出力電圧VB、システム電圧VM、及びリアクトルL1のリアクトル値Lを用いて、以下の数式(1)及び(2)で表すことができる。
【0106】
下アーム選択時:di/dt=(VB−VM)/L ・・・(1)
上アーム選択時:di/dt=VB/L ・・・(2)
よって、上述した数式で表されるdi/dt及びその時点でのILの推測値に基づいて保持時間“T1”及び“T2”を設定すれば、電流値がゼロにまで減衰するまでの時間を正確に推定でき、より好適に原点学習を行える。なお、ILの推測値は、確実に電流値をゼロにまで減衰させるためにも大きめに見積もっておくことが好ましい。但し、大きすぎても不都合が発生するおそれがあるため、例えばコンバータ12の最大定格電流や、補正前の電流センサ18の出力値に最悪誤差量を加味した値を用いればよい。
【0107】
保持時間T1が経過すると、その時点での電流センサ18の出力値がゼロであるとしてオフセット補正(原点学習)が行われる。これにより、補正前の電流センサ18の出力値がオフセット誤差を含んでいたとしても、補正後の電流センサ18の出力値は真のILの値となる。
【0108】
オフセット補正が行われた後には、デューティ指令が元の電流制御演算部222からの値へと戻されることにより、上アームの駆動が開始される。ここで、図を見ても分かるように、下アームがオフとされてから上アームがオンとされるまでには少なくとも保持時間“T1”空くことになるので、スイッチング素子Q1,Q2の短絡を確実に防止することができる。
【0109】
以上説明したように、本実施形態に係る電圧変換装置の制御装置によれば、コンバータ12における2つのスイッチング素子の短絡を防止すると共に、コンバータ12に供給される電流の電流値を正確に検出することが可能である。
【0110】
本発明は、上述した実施形態に限られるものではなく、特許請求の範囲及び明細書全体から読み取れる発明の要旨或いは思想に反しない範囲で適宜変更可能であり、そのような変更を伴う電圧変換装置の制御装置もまた本発明の技術的範囲に含まれるものである。
【符号の説明】
【0111】
12…コンバータ、18…電流センサ、20…直流電圧発生部、22,23…インバータ、28…蓄電装置、30…ECU、40…エンジン、41…動力分割機構、42…駆動輪、45…負荷装置、100…車両、200…電圧指令生成部、210…電圧制御部、211…減算部、212…電圧制御演算部、213…電流指令生成部、220…電流制御部、221…減算部、222…電流制御演算部、230…デューティ指令切替部、235…キャリア比較コンパレータ、240…サンプリングホールド部、245…減算部、250…キャリア信号生成部、260…基準値演算部、270…片アーム駆動判定部、281…デューティ指令切替判定部、282…デューティ指令切替保持部、285…原点学習要否判定部、290…原点値保持部、C2…平滑コンデンサ、D1,D2…ダイオード、L1…リアクトル、MG1,MG2…モータジェネレータ、Q1,Q2…スイッチング素子、SR1,SR2…システムリレー。
【特許請求の範囲】
【請求項1】
互いに直列に接続される第1スイッチング素子及び第2スイッチング素子、並びに前記第1スイッチング素子及び前記第2スイッチング素子に供給される電流の電流値を検出する電流検出手段を備える電圧変換装置の制御装置であって、
前記第1スイッチング素子及び前記第2スイッチング素子のデューティ比率に対応するデューティ指令信号を生成するデューティ指令信号生成手段と、
前記第1スイッチング素子及び前記第2スイッチング素子のスイッチング周波数に対応するキャリア信号を生成するキャリア信号生成手段と、
前記デューティ指令信号及び前記キャリア信号を互いに比較することで、前記第1スイッチング素子及び前記第2スイッチング素子の各々のオンオフを切替えるスイッチング制御信号を夫々生成するスイッチング制御信号生成手段と、
前記第1スイッチング素子及び前記第2スイッチング素子を択一的にオンとするように前記スイッチング制御信号生成手段を制御することで、前記第1スイッチング素子を含んでなる第1アーム及び前記第2スイッチング素子を含んでなる第2アームのいずれか一方のみによる片アーム駆動を実現する片アーム駆動制御手段と、
前記第1アームによる片アーム駆動及び前記第2アームによる片アーム駆動を相互に切替える際に、前記第1スイッチング素子及び前記第2スイッチング素子がいずれもオフとなるデューティ指令信号を所定期間生成するようにデューティ指令信号生成手段を制御するデューティ制御手段と、
前記所定期間内に前記電流検出手段で検出された電流値をオフセット原点として学習する原点学習手段と
を備えることを特徴とする電圧変換装置の制御装置。
【請求項1】
互いに直列に接続される第1スイッチング素子及び第2スイッチング素子、並びに前記第1スイッチング素子及び前記第2スイッチング素子に供給される電流の電流値を検出する電流検出手段を備える電圧変換装置の制御装置であって、
前記第1スイッチング素子及び前記第2スイッチング素子のデューティ比率に対応するデューティ指令信号を生成するデューティ指令信号生成手段と、
前記第1スイッチング素子及び前記第2スイッチング素子のスイッチング周波数に対応するキャリア信号を生成するキャリア信号生成手段と、
前記デューティ指令信号及び前記キャリア信号を互いに比較することで、前記第1スイッチング素子及び前記第2スイッチング素子の各々のオンオフを切替えるスイッチング制御信号を夫々生成するスイッチング制御信号生成手段と、
前記第1スイッチング素子及び前記第2スイッチング素子を択一的にオンとするように前記スイッチング制御信号生成手段を制御することで、前記第1スイッチング素子を含んでなる第1アーム及び前記第2スイッチング素子を含んでなる第2アームのいずれか一方のみによる片アーム駆動を実現する片アーム駆動制御手段と、
前記第1アームによる片アーム駆動及び前記第2アームによる片アーム駆動を相互に切替える際に、前記第1スイッチング素子及び前記第2スイッチング素子がいずれもオフとなるデューティ指令信号を所定期間生成するようにデューティ指令信号生成手段を制御するデューティ制御手段と、
前記所定期間内に前記電流検出手段で検出された電流値をオフセット原点として学習する原点学習手段と
を備えることを特徴とする電圧変換装置の制御装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2013−110932(P2013−110932A)
【公開日】平成25年6月6日(2013.6.6)
【国際特許分類】
【出願番号】特願2011−256255(P2011−256255)
【出願日】平成23年11月24日(2011.11.24)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
【公開日】平成25年6月6日(2013.6.6)
【国際特許分類】
【出願日】平成23年11月24日(2011.11.24)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
[ Back to top ]