
電圧発生装置及び画像形成装置
【課題】簡易にPWM信号を生成して、目標とする電圧を生成することができる電圧発生装置を提供する。
【解決手段】出力電圧値に対応したデューティ比を設定電圧テーブルから取得し、デューティ比を有する送信データを生成して出力するCPU3と、受信した送信データを格納し、格納した送信データをその格納した順番に読み出して、PWM信号として直列送信するバッファと、この送信データをバッファからすべて読み出したときは、CPU3へ送信データの送信を要求する送信要求部とを有するUART送信機7と、PWM信号からその平均電圧を生成する累積電圧生成部15と、平均電圧を増幅して出力電圧を生成する増幅器11と、出力電圧に基づく制御信号を生成して、この出力電圧の出力/停止を制御する出力制御部17と、を備えることを特徴とする。
【解決手段】出力電圧値に対応したデューティ比を設定電圧テーブルから取得し、デューティ比を有する送信データを生成して出力するCPU3と、受信した送信データを格納し、格納した送信データをその格納した順番に読み出して、PWM信号として直列送信するバッファと、この送信データをバッファからすべて読み出したときは、CPU3へ送信データの送信を要求する送信要求部とを有するUART送信機7と、PWM信号からその平均電圧を生成する累積電圧生成部15と、平均電圧を増幅して出力電圧を生成する増幅器11と、出力電圧に基づく制御信号を生成して、この出力電圧の出力/停止を制御する出力制御部17と、を備えることを特徴とする。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、電源電圧をPWM(Pulse Width Modulation)信号を用いて制御を行う電圧発生装置、及びこの電圧発生装置を用いた画像形成装置に関する。
【背景技術】
【0002】
従来から、電圧発生装置は、PWM(Pulse Width Modulation)信号を用いて電圧を制御する方式が広く採用されている。この電圧発生装置は、PWM制御回路及びスイッチング電源回路を有し、これをF/W(Firm/Ware)等で制御することにより、電圧を制御している。
【0003】
特許文献1では、電子写真記録装置の高圧電源回路における制御回路のCPU(Central Processing Unit)が転写ローラの抵抗値と印刷媒体の抵抗値とに基づいて転写電圧を制御する技術が開示されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開平7−168467号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、特許文献1に記載の技術では、高電圧制御回路における電圧制御のためにPWM制御回路を必要とするが、このPWM制御回路では、CPUがPWM信号の生成を制御するため、CPUの負荷が小さくなかった。また、PWM制御回路は汎用性に乏しいため、新規にLSI(Large Scale Integration)を設計する経費が発生し、コストアップになるという問題があった。
【0006】
本発明は、このような問題を解決するためになされたものであり、簡易にPWM信号を生成して、目標とする電圧を発生することができる電圧発生装置を提供することを課題とする。また、この電圧発生装置を用いた画像形成装置を提供することを課題とする。
【課題を解決するための手段】
【0007】
前記課題を解決するために、本発明の一の手段は、PWM信号を用いて出力電圧を発生する電圧発生装置であって、前記出力電圧の値とPWM信号のデューティ比とを対応付けた設定電圧テーブルを格納した記憶部と、前記出力電圧の値に対応したデューティ比を前記設定電圧テーブルから取得し、前記デューティ比の時系列データに対応する送信データを生成して出力する演算部と、前記演算部から受信した送信データを格納し、格納した送信データをその格納した順番に読み出して、PWM信号として直列送信するバッファと、この送信データをバッファからすべて読み出したときは、前記演算部へ送信データの送信を要求する送信要求部とを有する直列送信機と、前記PWM信号からその平均電圧を生成する累積電圧生成部と、前記累積電圧生成部で生成された平均電圧を増幅して出力電圧を生成する増幅器と、前記出力電圧に基づく制御信号を生成して、この出力電圧の出力/停止を制御する出力制御部と、を備えることを特徴とする。
【0008】
ここで、出力制御部は、さらに、出力電圧に対応する基準電圧を生成する基準電圧生成部と、前記出力電圧を所定の抵抗値で分割して検査電圧を生成する検査電圧生成部と、前記基準電圧と、前記検査電圧とを入力して比較する比較器とを備え、前記検査電圧が前記基準電圧より低下したときは、前記比較器が、前記PWM信号を出力するようにして前記直列送信機を制御するものである。
【0009】
また、本発明の他の手段は、少なくとも、感光ドラムと、前記感光ドラムの表面を一様に帯電させるための帯電部と、前記帯電部によって一様に帯電された前記感光ドラムに、形成する画像に基づいて光の照射を行う光源と、前記光の照射によって前記感光ドラム上に形成された静電潜像に従ってトナーを付着させ、静電潜像をトナー画像に可視化する現像装置と、前記感光ドラム上に残されたトナーを回収するクリーニング部と、印刷用紙に前記トナー画像を転写する転写部と、前記電圧発生装置と、を備え、前記電圧発生装置は、前記帯電部と前記現像装置と前記転写部との何れか一つ、又は、これらの組み合わせに印加するバイアス電圧を発生することを特徴とする。
【発明の効果】
【0010】
本発明によれば、簡易にPWM信号を生成して、目標とする電圧を発生することができる電圧発生装置を提供することが可能になる。また、この電圧発生装置を用いた画像形成装置を提供することが可能になる。
【図面の簡単な説明】
【0011】
【図1】第1実施形態に係る電圧発生装置の構成図である。
【図2】電圧発生装置に用いられるUART送信機の内部構成図である。
【図3】第1実施形態に係る電圧発生装置の初期化処理の動作を示すフローチャートである。
【図4】第1実施形態に係る電圧発生装置の高圧電源ON処理の動作を示すフローチャートである。
【図5】図4における電圧設定処理の動作の詳細を示すフローチャートである。
【図6】設定電圧値とPWM信号のデューティ値との対応を示すテーブルである。
【図7】図5における送信データセット処理の動作を示すフローチャートである。
【図8】PWM-Dutyと送信データの変換テーブルである。
【図9】送信データテーブル、及びその演算経過を示す表である。
【図10】UART送信機の送信データを示す図である。
【図11】送信データの送信例を示す図である。
【図12】図5における送信処理の動作を示すフローチャートである。
【図13】第1実施形態に係る電圧発生装置の送信割り込み発生処理の動作を示すフローチャートである。
【図14】第1実施形態に係る電圧発生装置の高圧電源OFF処理の動作を示すフローチャートである。
【図15】PWM信号と出力電圧との関係を示す図である
【図16】電圧発生装置を用いた画像形成装置を示す図である。
【図17】図16における画像形成部の詳細を示す図である。
【図18】第2実施形態に係る電圧発生装置の構成図である。
【図19】第2実施形態に係る電圧発生装置の初期化処理の動作を示すフローチャートである。
【図20】第2実施形態に係る電圧発生装置の電圧設定処理を示すフローチャートである。
【図21】第2実施形態に係る電圧発生装置の設定電圧ごとのPWM-Duty初期値、PWM-Duty最大値、PWM-Duty最小値及びPWM-ON-Duty目標値を示すテーブルである。
【図22】第2実施形態に係る電圧発生装置の送信処理の動作を示すフローチャートである。
【図23】第2実施形態に係る電圧発生装置のタイマ割り込み処理の動作を示すフローチャートである。
【発明を実施するための形態】
【0012】
本発明に係る電圧発生装置について、図1ないし図23を参照しながら実施形態を説明する。なお、実施形態を説明するにあたり、同様な構成又は機能を示す部位については、同一の符号を付し、その説明の重複を省略する。
【0013】
(第1実施形態)
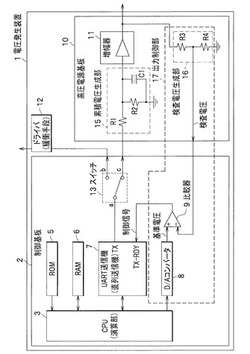
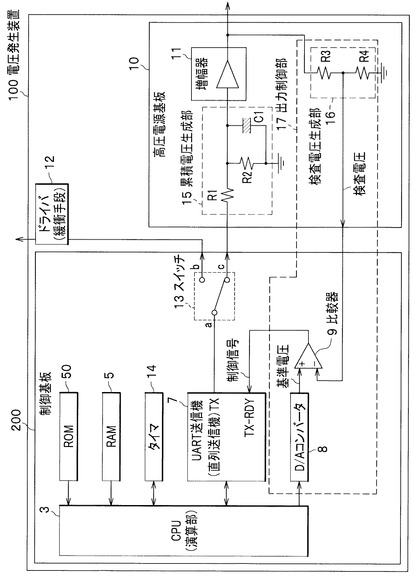
図1は、第1実施形態に係る電圧発生装置1の構成図である。図1に示すように、電圧発生装置1は、制御基板2、高圧電源基板10及びドライバ12(緩衝手段)を備える。制御基板2は、制御部(演算部)としてのCPU3、記憶部としてのROM5及びRAM6、並列−直列変換器としてのUART(Universal Asynchronous Receiver Transmitter)送信機7、D/A(Digital/Analogue)コンバータ8、比較器9及びスイッチ13を備える。
【0014】
CPU3は、各種プログラムを実行して、PWM信号の元になる送信データを生成するものである。ROM5及びRAM6は、CPU3に実行させるためのプログラムや各種データを記憶するものである。ドライバ12は、電圧発生装置1が未使用のとき、UART送信機7の出力をシリアル伝送して外部機器に接続するためのものである。スイッチ13は、スイッチ13の端子aとUART送信機7のTX端子とを接続する。スイッチ13の端子cを平均化回路としての累積電圧生成部15の抵抗器R1の一端と接続する。スイッチ13の端子bをドライバ12と接続する。これにより、スイッチ13は、UART送信機7のTX端子と、累積電圧生成部15の抵抗器R1の一端及びドライバ12の入力端の何れか一方とを接続する。
【0015】
D/Aコンバータ8は、電圧発生装置1の出力電圧である目標とする高電圧のスライスレベル(基準電圧)をデジタル信号からアナログ信号に変換して出力するものである。比較器9は、D/Aコンバータ8の出力であるスライスレベルと、高圧電源基板10からのフィードバック電圧である検査電圧とを比較し、出力を制御信号としてUART送信機7のゲート端子としてのTX−RDY端子に入力するものである。
【0016】
高圧電源基板10は、累積電圧生成部15、増幅器11及び検査電圧生成部16を備える。累積電圧生成部15は、抵抗器R1、R2及びコンデンサC1を備え、入力電圧を平滑する。図1に示すように、抵抗器R1は、一端がスイッチ13の端子cと接続され、他の一端が増幅器11の入力端に接続されている。抵抗器R2は、一端を抵抗器R1と増幅器11の入力との接続線に接続し、他の一端を接地させている。コンデンサC1は、一端を抵抗器R1と増幅器11の入力との接続線に接続し、他の一端を接地させている。スイッチ13の切り替えにより、抵抗器R1の一端とUART送信機7の端子TXとが接続される。
【0017】
増幅器11は、累積電圧生成部15で生成された電圧を目標の高電圧に昇圧させるものである。検査電圧生成部16は、抵抗器R3及び抵抗器R4を備える。抵抗器R3及び抵抗器R4は、高電圧を抵抗器R3と抵抗器R4とで分圧して検査電圧を作り出すものであり、抵抗器R3は一端を増幅器の出力端に接続し、他の一端を抵抗器R4の一端と接続している。抵抗器R4の他の一端は接地されている。抵抗器R3と抵抗器R4との接続点における電位は、検査電圧として比較器9に入力される。
ここで、D/Aコンバータ8、比較器9及び検査電圧生成部16は出力制御部17を構成する。
【0018】
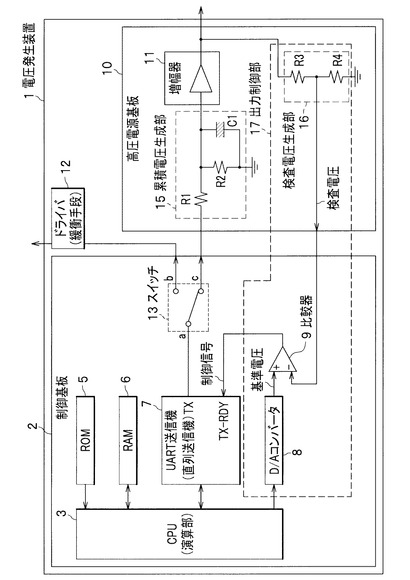
図2は、電圧発生装置1に用いられるUART送信機7の内部構成図である。UART送信機7は、CPU3から送出される送信データを格納し、比較器9(図1参照)から出力される制御信号に従って、この送信データを格納した順に読み出して1ビットずつPWM信号として出力するものである。UART送信機7は、内部バス21、バッファとしての送信データFIFO22及びレジスタ23から構成される。さらに、UART送信機7は、比較器9からの制御信号の入力端子TX−RDY25と、PWM信号の出力端子TX24とを備える。
【0019】
内部バス21は、CPU3との間で送信データ等のデータのやり取りを行うものである。送信データFIFO22は、CPU3から受信した送信データを8バイト分格納し、格納した順に読み出して(先入れ先出し)1ビットずつPWM信号として、所定のボーレートで出力するものである。レジスタ23は、UART送信機7の各種設定を保持しておくものである。
【0020】
レジスタ23は、複数のフリップフロップから構成され、UART送信機7の機能を発揮するように設定される。例えば、送信データFIFO22における送信データがすべて読み込まれて、送信データFIFO22がEmptyになったときに、レジスタ23は、割り込み信号26をCPU3に対して出力して、送信データを送信するように送信データ要求割り込みが設定される(送信要求部)。また、他の一つのレジスタ23は、TX−RDY端子25に入力される信号(比較器9からの制御信号)の有無に対応して、送信データ(PWM信号)の送信の開始又は停止を行うように設定される。送信データFIFO22からは、所定のボーレートに従って、送信データが格納された順に読み出されて、1ビットずつPWM信号として出力端子TX24から出力される。
【0021】
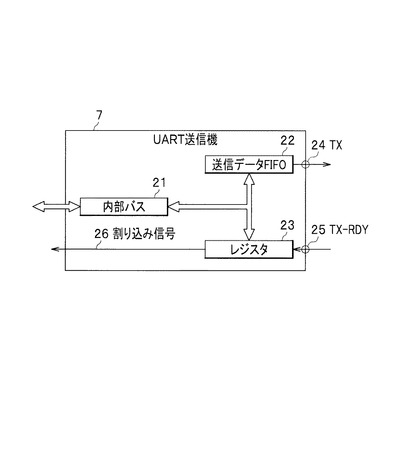
本実施形態に係る電圧発生装置1の動作を図3〜図15で説明する。図3は、電圧発生装置1の初期化処理の動作を示すフローチャートである。
まず、CPU3は、UART送信機7からCPU3への送信データ要求割り込みを禁止するように、UART送信機7のレジスタ23に設定する(ステップS101)。次に、CPU3は、UART送信機7のボーレートに対応する通信速度が115200BPS(Bits Per Second)になるように、UART送信機7のレジスタ23に設定する(ステップS102)。これは、UART送信機7の送信データをPWM信号と見なした場合、PWM信号の周波数が約11.5kHzに相当することを意味する。
【0022】
次に、CPU3は、UART送信機7が送信する送信データ(PWM信号)のフォーマットをレジスタ23に設定する。ここでは、送信データは、Data 8bits(パリティ無し)、Start bit 1bit及びStop bit 1bitの合計10bitsから構成される(ステップS103)。次に、CPU3は、UART送信機7からの割り込み要因を、「送信データFIFOがEmptyになったとき」と設定する(ステップS104)。以上の動作により、本電圧発生装置1の初期化処理の動作が終了する。
【0023】
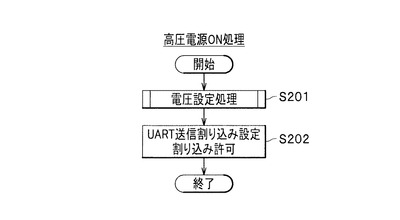
次に、図4を用いて、電圧発生装置1において目標とする高電圧を出力する処理(高圧電源ON処理)について説明する。図4は、電圧発生装置1の高圧電源ON処理の動作を示すフローチャートである。まず、電圧設定処理を実行する(ステップS201)。電圧設定処理の詳細は後記する(図5参照)。これにより、UART送信機7が送信データの送信を開始すると共に、送信データがPWM信号と見なされ、累積電圧生成部15で時間平均され平均電圧が出力される。そして、この平均電圧が増幅器11で増幅されて高電圧が出力する。次に、CPU3は、UART送信機7の送信データ要求割り込みを許可するようにレジスタ23を設定する(ステップS202)。これにより、UART送信機7の送信データFIFOがEmptyになると割り込みが発生するようになる。以上の動作により、電圧発生装置1の高圧電源ON処理の動作が終了する。
【0024】
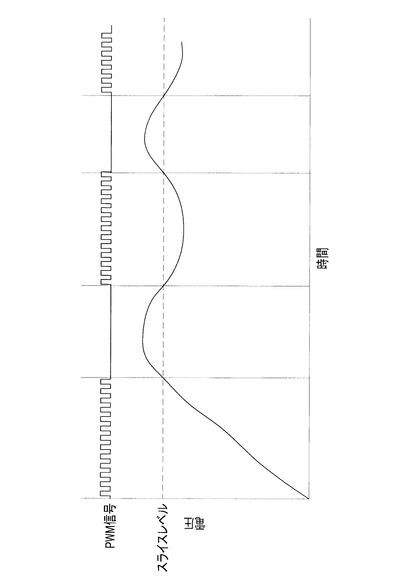
高圧電源ON処理に基づいて、UART送信機7からPWM信号が出力される。このPWM信号は、前記した制御信号がONのときは、即ち、検査電圧が基準電圧(スライスレベル)よりも低いときは、比較器9は、UART送信機7からPWM信号を出力するように制御信号をONにして、UART送信機7のTX−RDY端子に入力する(図15参照)。そして、検査電圧が基準電圧より高いときは、比較器9はPWM信号の出力を停止するように制御信号をOFFにする。
【0025】
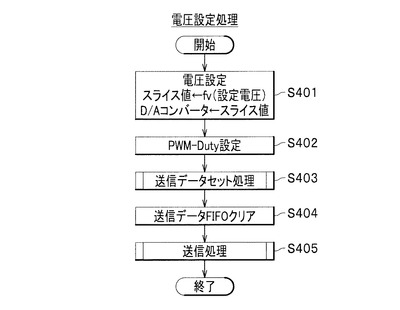
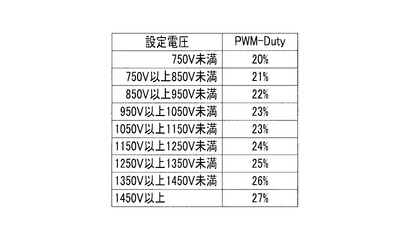
図5は、図4における電圧設定処理の動作の詳細を示すフローチャートである。図6は、設定電圧値(高電圧値)とPWM信号のデューティ比との対応を示すテーブルである。図5に示す電圧設定処理は、前記した高圧電源ON処理において実行されるが、発生している高電圧を変更する際にも実行される。まず、CPU3は、目標とする高電圧を設定電圧としてスライス値(基準電圧)をD/Aコンバータに出力する(ステップS401)。これは、設定電圧xから関数fv()により、D/Aコンバータ8に出力するスライス値を算出する。関数fv(x)は、例えば式1のようになる。
【0026】
fv(x)=255-(255・R6・x)/(Vss・(R5+R6)) ・・・・・ (式1)
但し、
x:設定電圧
R5:増幅抵抗値(kΩ)
R6:増幅抵抗値(kΩ)
Vss:システム電圧(5V)
とする。
【0027】
ここで、増幅抵抗値R5=50000、増幅抵抗値R6=110とし、例えば、設定電圧が1100Vの場合、式1は、
fv(1100)=255−(255×110×1100)/(5×(50000+110))≒131.8
となり、スライス値は、四捨五入して132となる。そして、そのスライス値132をD/Aコンバータに出力する(ステップS401)。次に、ROM5に格納された図6に示すテーブルを用いて、PWM信号をONにしたときのデューティ比(以下、「PWM-Duty」という)を設定する(ステップS402)。例えば、設定電圧が1100Vの場合、PWM-Dutyは23%に設定される。次に、CPU3は、送信データのセット処理を行う(ステップS403)。送信データのセット処理の詳細は、後記する(図7参照)。
【0028】
次に、UART送信機7の送信データFIFO22をクリア(Empty)する(ステップS404)。これは、この電圧設定処理がPWM信号出力中に実行された場合、新たな設定電圧のための送信データを早く送信するためである。次に、送信データの送信処理を実行する(ステップS405)。これは、送信データテーブルSend_Data_t[](図9参照)の送信データをUART送信機7の送信データFIFO22に書き込む処理である。送信処理の詳細は後記する(図12参照)。以上の動作により、電圧発生装置1における電圧設定処理の動作が終了する。
【0029】
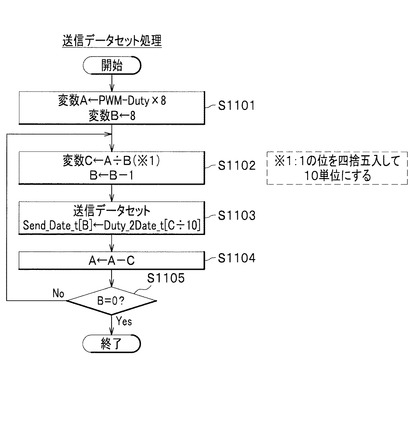
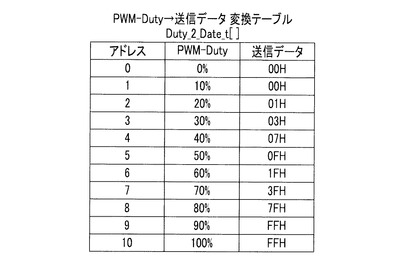
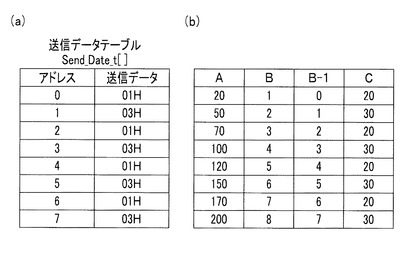
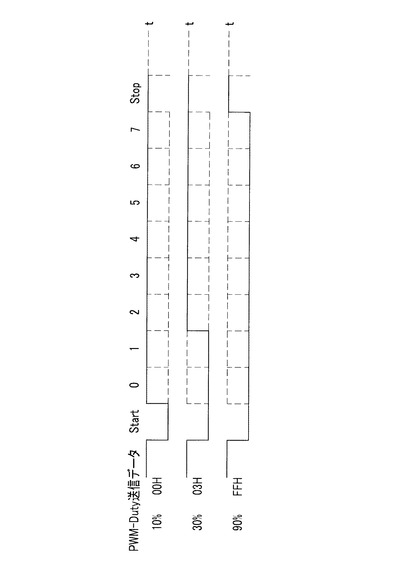
図7は、図5における送信データセット処理の動作を示すフローチャートである。図8は、PWM-Dutyと送信データの変換テーブルである。図9(a)は、送信データテーブルであり、図9(b)はその演算過程を示す表である。図10は、UART送信機7の送信データ(PWM信号)を示す図である。
送信データセット処理では、PWM-Dutyより、UART送信機7が送信する送信データを求める(図6参照)。図10に示すように、UART送信機7の送信データは、Start-bitが1bit、Data-bitが8bits、Stop-bitが1bitの計10bitsから構成される。このため、UART送信機7は、例えばPWM-Dutyが10%なら送信データとして“00H”を送信し、PWM-Dutyが90%なら“FFH”を送信する。ここで、H(Hexadecimal)は6進数を示す。
【0030】
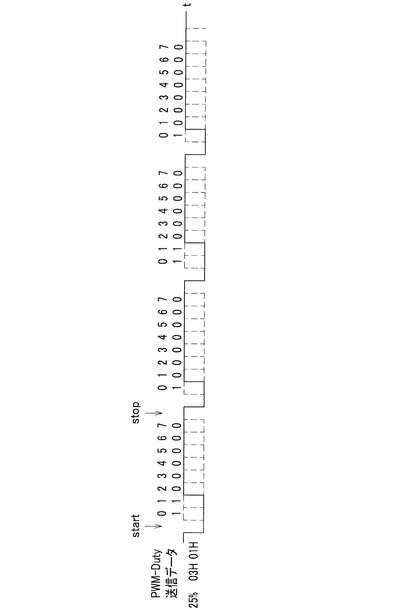
しかし、送信データ1バイト単位では、前記したように10bitsから構成されるため、PWM-Dutyは10%刻みでしか設定できない。図11は、送信データの送信例を示す図である。そこで、図11に示すように、例えばPWM-Duty25%では、送信データ“03H”と“01H”とを交互に送信することにより、平均して25%を実現することができる。このように、送信データはデューティ比の時系列データに対応したものとなる。
【0031】
まず、PWM-Dutyから送信データの組み合わせを求める準備として、変数Aに“PWM-Duty×8”を代入し、変数Bに“8”を代入する(ステップS1101)。ここで、変数Aは、UART送信機7の送信データFIFO22(図2)における8バイト分の送信データを求めるための変数である。なお、変数Bはカウンタとなる。次に、変数Cに“A÷B(1の位を四捨五入)”を代入し、変数Bに“B−1“を代入する(ステップS1102)。ここで、変数Cは、求める送信データのPWM-Dutyである。変数Bは、求めた送信データを図9(a)に示す送信データテーブルSend_Data_t[]に格納するポインタ(アドレス)とするため、また、送信データをカウントするために減算する。
【0032】
次に、変数Cから送信データを求める。送信データは、図8に示すPWM-Duty→送信データ変換テーブルであるDuty_2_Data_t[]において、“C÷10”でポインタとしてのアドレスを算出してこのアドレスの送信データを読み出すことにより求められる。このようにして求めた送信データを、図9(a)の送信データテーブルSend_Data_t[]に変数Bの値をアドレスとして書き込む(ステップS1103)。次に、変数AからCを減算した値を変数Aに代入する(ステップS1104)。次に、変数Bの値が0か否か判断する(ステップS1105)。変数Bの値が0でなければステップS1102に進み(S1105のNo)、これにより、ステップS1102〜S1104が8回繰り返されることになる。一方、変数Bの値が0であれば、処理を終了する(ステップS1105のYes)。以上の動作により、電圧発生装置1の送信データセット処理の動作が終了する。
【0033】
具体的に、前記したPWM-Duty25%を例にすると、変数Aに25×8=200が代入され(S1101)、A÷B=200÷8=25を四捨五入した“30”が変数Cに代入され、変数Bの値がB−1=8−1=7に変更され(S1102)、Duty_2_Data_t[30÷10]の値“03H”がSend_Data_t[7]に入る。そして、変数AにA−C=200−30=170が代入され(S1104)、処理がS1102に戻る。これらの処理S1102〜S1104が8回繰り返された変数A、B、(B−1)、Cの変化を図9(b)に示す。これにより、変数Cの値が“20”と“30”とで交互に繰り返されることになり、
図8のDuty_2_Data_t[20÷10]の値“01H”と、Duty_2_Data_t[30÷10]の値“03H”とが交互にSend_Data_t[](図9(a))に入る。
【0034】
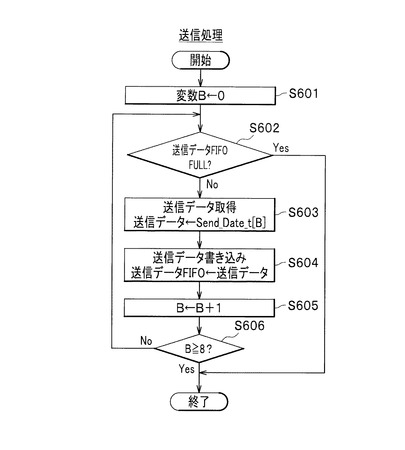
図12は、図5における送信処理の動作を示すフローチャートである。ここでいう送信処理は、CPU3からUART送信機7への送信データの書き込みをいう。
まず、変数Bに“0”を代入する(ステップS601)。変数Bは、8バイトの送信データをUART送信機7の送信データFIFO22に書き込むためのカウンタである。次に、UART送信機7の送信データFIFO22がFULLか否かを判断する(ステップS602)。送信データFIFO22がFULLの場合は(ステップS602のYes)、送信処理を終了する。一方、FULLでない場合は(ステップS602のNo)、変数Bの値をアドレス値とした送信データテーブルSend_Data_t[](図9(a)参照)の送信データを取得する(ステップS603)。
【0035】
次に、送信データをUART送信機7の送信データFIFO22に書き込む(ステップS604)。次に、UART送信機7の送信データFIFO22への書き込み回数をカウントするため、変数Bの値を+1カウントアップする(ステップS605)。次に、変数Bの値が8以上か否かを判断する(ステップS606)。ここで、変数Bの値が8以上でなければ(ステップS606のNo)、ステップS602に進み、ステップS602〜ステップS605が8回繰り返される。一方、変数Bの値が8以上であれば(ステップS606のYes)、送信データが送信データFIFO22に8バイト書き込まれたことになり、送信処理を終了する。以上の動作により、電圧発生装置1におけるCPU3からUART送信機7への送信データの送信処理の動作が終了する。
【0036】
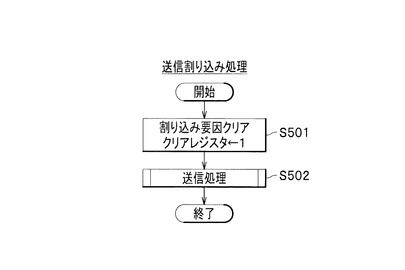
図13は、UART送信機7における送信データFIFO22がEmptyのときの送信データ要求割り込み発生処理(送信割り込み処理)の動作を示すフローチャートである。
ここで、UART送信機7のボーレート(通信速度)を115200BPS、送信データFIFOを8バイトとすると、約700μsecごとに、UART送信機7からCPU3へ送信割り込み処理が実行されることになる。まず、UART送信機7で発生した送信データ要求割り込みの割り込み要因をクリアする。これは、CPU3からUART送信機7のレジスタ23の内、割り込みに関するクリアレジスタに“1”を書き込むことにより実行される(ステップS501)。
【0037】
次に、図12に示す送信処理が実行される(ステップS502)。これにより、UART送信機7の送信データFIFO22に送信データが書き込まれる。そして、UART送信機7のボーレートに対応する通信速度を115200BPSとすると、送信データの書き込みを約87μsec以内に実行すれば、送信データが途切れることなく送信される。これは、UART送信機7の送信データが、Start-bit(1bit)、Data-bit(8bits)、Stop-bit(1bit)の計10bitsから構成されるため、10bits÷115200bpsで、データ送信時間に約87μsec必要であるからである。以上の動作により、電源電圧装置1の送信割り込み処理が終了する。
【0038】
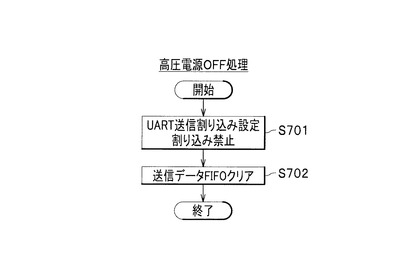
図14は、電圧発生装置1の高圧電源OFF処理の動作を示すフローチャートである。
まず、UART送信機7の割り込み設定を「割り込み禁止」にする(ステップS701)。これにより、UART送信機7の送信データFIFO22がEmptyになった時点で送信データの送信が停止し、PWM信号がOFFされたと同等になり、高電圧がOFFされることになる。次に、UART送信機7の送信データFIFO22をクリアする(ステップS702)。これは、UART送信機7おけるレジスタ23の割り込み設定を割り込み禁止にしても、送信データFIFO22がEmptyになるまでPWM信号が出力されるが、送信データFIFO22をクリアすることにより、即時にPWM信号をOFFするためである。
以上の動作により、電圧発生装置1の高圧電源OFF処理の動作が終了する。
【0039】
このように、第1実施形態によれば、UART送信機7から出力される送信データをPWM信号とみなして、目標とする高電圧を発生させることができる。図15は、PWM信号と出力電圧との関係を示す図であるが、基準電圧と検査電圧を比較して、図15に示すように、検査電圧がスライスレベル(基準電圧)よりも低いときは、CPU3が介在することなく、UART送信機7がPWM信号を発生して、目標とする高電圧を発生させることができる。
また、ドライバ12及びスイッチ13が設けられているので、RS−232Cの通信機能を備えている制御基板2を用いて、コストを増加させることなく、PWM制御された高電圧を発生することができる。
【0040】
本実施形態に係る電圧発生装置1を図16に示す画像形成装置30に用いることが可能である。
図16は、電圧発生装置1を用いた画像形成装置30を示す図である。
画像形成装置30は、本実施形態に係る電圧発生装置1、トナー像を形成する画像形成部31、光源であるLEDヘッド43、印刷用紙37を取り出す給紙ローラ32、印刷用紙37を搬送する搬送ローラ33、印刷用紙37の傾きの補正を行うレジストローラ34、印刷用紙37に画像形成部31により形成されたトナー像を転写する転写ローラ35、及び、トナー像が転写された印刷用紙37を挟んで圧力と熱とによりトナー像を定着させる定着手段36を備える。
【0041】
図17は、図16の画像形成部31の詳細を示す図である。
画像形成部31は、光の照射によってその表面の帯電状態を変化させる感光ドラム41、感光ドラム41の表面を一様に帯電させるための帯電ローラ42、帯電ローラ42によって一様に帯電された感光ドラム41に形成しようとする画像に基づいて光の照射を行うLEDヘッド43、LEDヘッド43によって感光ドラム41上に形成された静電潜像にしたがってトナーを付着させ、静電潜像をトナー像に可視化する現像ローラ44、及び、感光ドラム41上に残されたトナーを回収するクリーニングローラ45を備える。
【0042】
画像形成部31では、感光ドラム41は帯電ローラ42によってその表面が一様に帯電され、一様に帯電された感光ドラム41の表面にLEDヘッド43から画像情報に従った光の照射が行われて、感光ドラム41の表面に静電潜像が形成される。このようにして形成された静電潜像は、現像ロ一ラ44によってトナーによる可視像に現像されて、トナー画像となり、転写ローラ35によって印刷用紙37上に転写される。転写ローラ35の転写プロセスにおいて、印刷用紙37に転写されずに感光ドラム41の表面に残ったトナーはクリーニングローラ45によって掻き落とされて回収される。
ここで、帯電ローラ42、現像ローラ44及びクリーニングローラ45の電圧制御は、本実施形態の電圧発生装置1を用いることにより実現される。
【0043】
(変形例)
前記したように高圧電源OFF処理(図14)により、高電圧の出力を停止させたが、増幅器11そのものを停止させることにより、高電圧の出力を停止させてもよい。
【0044】
(第2実施形態)
図18は、第2実施形態に係る電圧発生装置100である。第1実施形態と同様な構成又は機能を示す部位については、その説明の重複を省略する。
電圧発生装置100は、制御基板200、高圧電源基板10及びドライバ12から構成される。制御基板200は、制御部としてのCPU3、記憶部としてのROM50及びRAM6、タイマ14、並列−直列変換器としてのUART送信機7、D/Aコンバータ8、比較器9、及び、スイッチ13を備える。
タイマ14は、CPU3に対して、所定時間が経過したときに定期的に割り込みを発生させるものである。タイマ14を備える点が、第1実施形態と相違する。
高圧電源基板10及びドライバ12は、第1の実施形態と同様なのでその説明を省略する。
【0045】
図19は、電圧発生装置100の初期化処理の動作を示すフローチャートである。
まず、CPU3は、UART送信機7からCPU3への送信データ要求割り込みを禁止するように、UART送信機7のレジスタ23を設定する(ステップS1201)。次に、CPU3は、UART送信機7のボーレートが115200BPS(Bits Per Second)になるように、UART送信機7のレジスタ23を設定する(ステップS1202)。これは、UART送信機7の送信データをPWM信号と見なした場合、PWM信号の周波数が約11.5kHzに相当することを意味する。次に、CPU3は、UART送信機7が送信するPWM信号を送信データとしてフォーマットをレジスタ23に設定する。ここでは、送信データは、Data bitが8bits(パリティ無し)、Start bitが1bit、及び、Stop bitが1bitの合計10bitsから構成される(ステップS1203)。
【0046】
次に、CPU3は、送信データFIFO22がEmptyになったときに割り込むように、UART送信機7からの割り込み要因をレジスタ23に設定する(ステップS1204)。次に、CPU3は、割り込みを発生させる所定時間として100msにタイマ14を設定する(ステップS1205)。次に、CPU3は、タイマ14の動作をスタートさせる(ステップS1206)。次に、タイマ14からのタイマ割り込みを割り込み許可に設定する(ステップS1207)。これにより、100msec間隔でタイマ割り込みが発生し、タイマ割り込み処理が実行される。以上の動作により、電圧発生装置100の初期化処理の動作が終了する。
【0047】
次に、高圧電源ON処理の動作は、図4に示す第1実施形態と同様である。ここでは、図4において、第1実施形態(図4ステップS201参照)と異なる電圧設定処理について図20を用いて説明する。図20は、第2実施形態における電圧設定処理を示すフローチャートである。
【0048】
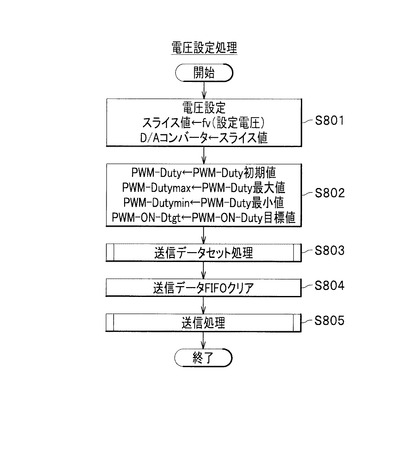
まず、CPU3は、目標とする高電圧を設定電圧としてスライス値(基準電圧)をD/Aコンバータに出力する。これは、設定電圧xから関数fv()により、D/Aコンバータ8に設定するスライス値を算出する。スライス値の算出方法は第1実施形態と同様なので省略する。そして、スライス値である“132”をD/Aコンバータ8に設定する(ステップS801)。
【0049】
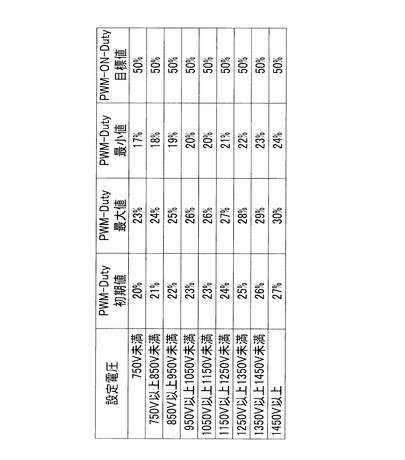
次に、設定電圧よりPWM-Duty初期値(PWM-Duty)、PWM-Duty最大値(PWM-Dutymax)、PWM-Duty最小値(PWM-Dutymin)及びPWM-ON-Duty目標値(PWM-ON-Dtgt)を求める。
図21は、設定電圧ごとのPWM-Duty初期値、PWM-Duty最大値、PWM-Duty最小値及びPWM-ON-Duty目標値を示すテーブルである。設定電圧を元に、図21に示す表より各値を抽出し、それぞれ、パラメータPWM-Duty、PWM-Dutymax、PWM-Dutymin及びPWM-ON-Dtgtに格納する(ステップS802)。例えば、設定電圧が1100Vの場合、PWM-Dutyは23%、PWM-Dutymaxは26%、PWM-Dutyminは20%、PWM-ON-Dtgtは50%となる。次に、送信データセット処理を実行する(ステップS803)。これは、第1実施形態において図7で説明した送信データセット処理と同様である。これにより、図9に示す送信データテーブルSend_Data_t[]に送信データがセットされる。
【0050】
次に、CPU3は、UART送信機7の送信データFIFO22をクリアする(ステップS804)。これは、この電圧設定処理がPWM信号の送出中に実行された場合、新たな設定電圧のための送信データを早く送信するためである。次に、CPU3は、送信データの送信処理を実行する(ステップS805)。これは、送信データテーブルSend_Data_t[]の送信データをUART送信機7の送信データFIFO22に書き込む処理である。送信処理の詳細は後記(図22参照)する。以上の動作により、電圧発生装置100の電圧設定処理の動作が終了する。
【0051】
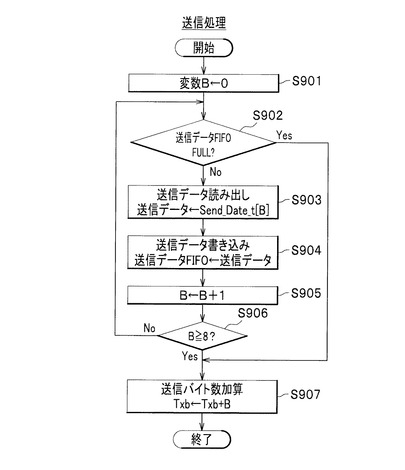
図22は、電圧発生装置100の送信処理の動作を示すフローチャートである。ここでいう送信処理とは、CPU3からUART送信機7への送信データの書き込みをいう。
まず、CPU3は変数Bに0を代入する(ステップS901)。変数Bは、8バイトの送信データをUART送信機7の送信データFIFO22に書き込むためのカウンタである。
次に、CPU3は、UART送信機7の送信データFIFO22がFULLか否か判断する(ステップS902)。送信データFIFO22がFULLの場合は(ステップS902のYes)、ステップS907に進む。FULLでない場合は(ステップS902のNo)、ステップS903に進む。
【0052】
次に、変数Bの値をアドレス値とした送信データテーブルSend_Data_t[](図9参照)の送信データを取得する(ステップS903)。次に、送信データをUART送信機7の送信データFIFO22に書き込む(ステップS904)。次に、UART送信機7の送信データFIFOへ書き込んだ送信データのバイト数をカウントするため、変数Bの値を+1カウントアップする(ステップS905)。次に、変数Bの値が8以上かどうか判断する(ステップS906)。変数Bの値が8以上でなければ(ステップS906のNo)、ステップS902に進み、ステップS902〜905が8回繰り返される。一方、変数Bの値が8以上であれば(ステップS906のYes)、送信データが送信データFIFO22に8バイト書き込まれたことになる。次に、UART送信機7が送信した送信データの送信バイト数を数えるため、変数Txbに変数Bの値を加算する(ステップS907)。これは、PWM-ON-Dutyにより、PWM-Dutyを補正する計算に用いられる。以上の動作により、電圧発生装置100の送信処理の動作が終了する。
【0053】
第2実施形態における送信機7の送信データFIFO22による送信データの送信割り込み処理は、図13に示す第1実施形態における送信割り込み処理と同様なので説明を省略する。
【0054】
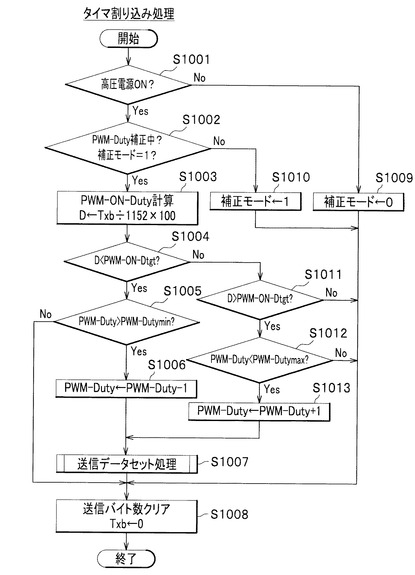
図23は、電圧発生装置100のタイマ割り込み処理の動作を示すフローチャートである。タイマ割り込み処理は、100msecごとに実行される。このタイマ割り込み処理は、タイマ割り込み1周期の間(100msec)にUART送信機7が送信した送信データ量を元にPWM-Dutyを補正するために行われる。
【0055】
まず、高圧電源がON状態か否かを確認する(S1001)。ON状態でない場合は(ステップS1001のNo)、CPU3は、PWM-Dutyの補正モードをクリアするため、RAM6に設定されているレジスタの補正モードを0にする(ステップS1009)。
一方、高圧電源がON状態であれば(ステップS1001のYes)、PWM-Duty補正モードか否かを確認する(ステップS1002)。なお、ステップS1002が最初に実行されるときはPWM-Duty補正モードではないため(ステップS1002のNo)、PMTM-Duty補正モードをセットするため、補正モードを“1”にする(ステップS1010)。
【0056】
PWM-Duty補正モードであった場合は(ステップS1002のYes)、PWM-ON-Dutyを計算する。ここで、UART送信機7のボーレートを115200bps、タイマの割り込み周期を100msecとすると、タイマ割り込み1周期の間の送信データの最大送信バイト数は、115200÷10×0.1=1152バイトとなり、1552バイトとなる。実際の送信バイト数は、変数Txbの値であり、PWM-ON-Dutyを計算して変数Dに入れる変数Dは、D=Txb/1152×100となる。
【0057】
次に、PWM-ON-Dutyである変数Dと、PWM-ON-Dutyの目標値であるPWM-ON-Dtgtとを比較する(ステップS1004)。変数DがPWM-ON-Dtgtより小さい場合は(ステップS1004のYes)、PWM-DutyとPWM-Duty最小値であるPWM-Dutyminとを比較する(ステップS1005)。PWM-DutyがPWM-Dutyminより大きい場合は(ステップS1005のYes)、PWM-Dutyから1減算する(ステップS1006)。これは、PWM-ON-Dutyが目標値であるPWM-ON-Dtgtより小さいため、PWM-Dutyを小さくすることにより、PWM-ON-Dutyを大きくするためである。
【0058】
次に、送信データセット処理を実行する(ステップS1007)。この処理は、図7に示す送信データセット処理と同様なので説明は省略する。これにより、図9に示す送信データテーブルSend_Data_t[]に送信データがセットされる。次に、タイマ割り込み1周期の間の送信データの送信バイト数をクリアするため、変数Txbに0を入れる(ステップS1008)。
【0059】
一方、変数Dの値がPWM-ON-Dtgtより大きい場合は(ステップS1004でNo)、PWM-ON-Dutyである変数Dと、PWM-ON-Dutyの目標値であるPWM-ON-Dtgtとを比較する(ステップS1011)。変数Dの値がPWM-ON-Dtgtより大きい場合は(ステップS1011のYes)、PWM-DutyとPWM-Duty最大値であるPWM-Dutymaxとを比較する(ステップS1012)。ここで、PWM-DutyがPWM-Dutymaxより小さい場合は(ステップS1012でYes)、PWM-Dutyに1を加算する(ステップS1013)。これは、PWM-ON-Dutyが目標値であるPWM-ON-Dtgtより大きいため、PWM-Dutyを大きくすることにより、PWM-ON-Dutyを小さくさせるためである。
【0060】
ステップS1013終了後はステップS1007に進む。なお、ステップS1005でPWM-DutyがPWM-Dutymin以下の場合、ステップS1011で変数DがPWM-ON-Dtgtと同じ場合、及び、ステップS1012でPWM-DutyがPWM-Dutymax以上の場合は、ステップS1008に進む。
以上の動作により、電圧発生装置100のタイマ割り込み処理の動作が終了する。
【0061】
第2実施形態における高圧電源OFF処理の動作は、第1実施形態と同様であるため説明を省略する。
【0062】
第2実施形態によれば、UART送信機7が所定時間に出力した送信データ(PWM信号)の量と、所定時間に出力可能な送信データ(PWM信号)の量とに基づいてデューティ比を補正することにより、出力電圧を制御することが可能になる。
【符号の説明】
【0063】
1、100 電圧発生装置
2、200 制御基板
3 CPU(演算部)
5 ROM(記憶部)
6 RAM(記憶部)
7 UART送信機(送信機)
8 D/Aコンバータ(基準電圧生成部)
9 比較器
10 高圧電源基板
11 増幅器
12 ドライバ(緩衝手段)
13 スイッチ
14 タイマ
15 累積電圧生成部
16 検査電圧生成部
17 出力制御部
21 内部バス
22 送信データFIFO(バッファ)
23 レジスタ(送信要求部)
30 画像形成装置
31 画像形成部
32 給紙ローラ
33 搬送ローラ
34 レジストローラ
35 転写ローラ(転写部)
36 定着手段
37 印刷用紙
41 感光ドラム
42 帯電ローラ(帯電部)
43 LEDヘッド(光源)
44 現像ローラ(現像装置)
45 クリーニングローラ(クリーニング部)
【技術分野】
【0001】
本発明は、電源電圧をPWM(Pulse Width Modulation)信号を用いて制御を行う電圧発生装置、及びこの電圧発生装置を用いた画像形成装置に関する。
【背景技術】
【0002】
従来から、電圧発生装置は、PWM(Pulse Width Modulation)信号を用いて電圧を制御する方式が広く採用されている。この電圧発生装置は、PWM制御回路及びスイッチング電源回路を有し、これをF/W(Firm/Ware)等で制御することにより、電圧を制御している。
【0003】
特許文献1では、電子写真記録装置の高圧電源回路における制御回路のCPU(Central Processing Unit)が転写ローラの抵抗値と印刷媒体の抵抗値とに基づいて転写電圧を制御する技術が開示されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開平7−168467号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、特許文献1に記載の技術では、高電圧制御回路における電圧制御のためにPWM制御回路を必要とするが、このPWM制御回路では、CPUがPWM信号の生成を制御するため、CPUの負荷が小さくなかった。また、PWM制御回路は汎用性に乏しいため、新規にLSI(Large Scale Integration)を設計する経費が発生し、コストアップになるという問題があった。
【0006】
本発明は、このような問題を解決するためになされたものであり、簡易にPWM信号を生成して、目標とする電圧を発生することができる電圧発生装置を提供することを課題とする。また、この電圧発生装置を用いた画像形成装置を提供することを課題とする。
【課題を解決するための手段】
【0007】
前記課題を解決するために、本発明の一の手段は、PWM信号を用いて出力電圧を発生する電圧発生装置であって、前記出力電圧の値とPWM信号のデューティ比とを対応付けた設定電圧テーブルを格納した記憶部と、前記出力電圧の値に対応したデューティ比を前記設定電圧テーブルから取得し、前記デューティ比の時系列データに対応する送信データを生成して出力する演算部と、前記演算部から受信した送信データを格納し、格納した送信データをその格納した順番に読み出して、PWM信号として直列送信するバッファと、この送信データをバッファからすべて読み出したときは、前記演算部へ送信データの送信を要求する送信要求部とを有する直列送信機と、前記PWM信号からその平均電圧を生成する累積電圧生成部と、前記累積電圧生成部で生成された平均電圧を増幅して出力電圧を生成する増幅器と、前記出力電圧に基づく制御信号を生成して、この出力電圧の出力/停止を制御する出力制御部と、を備えることを特徴とする。
【0008】
ここで、出力制御部は、さらに、出力電圧に対応する基準電圧を生成する基準電圧生成部と、前記出力電圧を所定の抵抗値で分割して検査電圧を生成する検査電圧生成部と、前記基準電圧と、前記検査電圧とを入力して比較する比較器とを備え、前記検査電圧が前記基準電圧より低下したときは、前記比較器が、前記PWM信号を出力するようにして前記直列送信機を制御するものである。
【0009】
また、本発明の他の手段は、少なくとも、感光ドラムと、前記感光ドラムの表面を一様に帯電させるための帯電部と、前記帯電部によって一様に帯電された前記感光ドラムに、形成する画像に基づいて光の照射を行う光源と、前記光の照射によって前記感光ドラム上に形成された静電潜像に従ってトナーを付着させ、静電潜像をトナー画像に可視化する現像装置と、前記感光ドラム上に残されたトナーを回収するクリーニング部と、印刷用紙に前記トナー画像を転写する転写部と、前記電圧発生装置と、を備え、前記電圧発生装置は、前記帯電部と前記現像装置と前記転写部との何れか一つ、又は、これらの組み合わせに印加するバイアス電圧を発生することを特徴とする。
【発明の効果】
【0010】
本発明によれば、簡易にPWM信号を生成して、目標とする電圧を発生することができる電圧発生装置を提供することが可能になる。また、この電圧発生装置を用いた画像形成装置を提供することが可能になる。
【図面の簡単な説明】
【0011】
【図1】第1実施形態に係る電圧発生装置の構成図である。
【図2】電圧発生装置に用いられるUART送信機の内部構成図である。
【図3】第1実施形態に係る電圧発生装置の初期化処理の動作を示すフローチャートである。
【図4】第1実施形態に係る電圧発生装置の高圧電源ON処理の動作を示すフローチャートである。
【図5】図4における電圧設定処理の動作の詳細を示すフローチャートである。
【図6】設定電圧値とPWM信号のデューティ値との対応を示すテーブルである。
【図7】図5における送信データセット処理の動作を示すフローチャートである。
【図8】PWM-Dutyと送信データの変換テーブルである。
【図9】送信データテーブル、及びその演算経過を示す表である。
【図10】UART送信機の送信データを示す図である。
【図11】送信データの送信例を示す図である。
【図12】図5における送信処理の動作を示すフローチャートである。
【図13】第1実施形態に係る電圧発生装置の送信割り込み発生処理の動作を示すフローチャートである。
【図14】第1実施形態に係る電圧発生装置の高圧電源OFF処理の動作を示すフローチャートである。
【図15】PWM信号と出力電圧との関係を示す図である
【図16】電圧発生装置を用いた画像形成装置を示す図である。
【図17】図16における画像形成部の詳細を示す図である。
【図18】第2実施形態に係る電圧発生装置の構成図である。
【図19】第2実施形態に係る電圧発生装置の初期化処理の動作を示すフローチャートである。
【図20】第2実施形態に係る電圧発生装置の電圧設定処理を示すフローチャートである。
【図21】第2実施形態に係る電圧発生装置の設定電圧ごとのPWM-Duty初期値、PWM-Duty最大値、PWM-Duty最小値及びPWM-ON-Duty目標値を示すテーブルである。
【図22】第2実施形態に係る電圧発生装置の送信処理の動作を示すフローチャートである。
【図23】第2実施形態に係る電圧発生装置のタイマ割り込み処理の動作を示すフローチャートである。
【発明を実施するための形態】
【0012】
本発明に係る電圧発生装置について、図1ないし図23を参照しながら実施形態を説明する。なお、実施形態を説明するにあたり、同様な構成又は機能を示す部位については、同一の符号を付し、その説明の重複を省略する。
【0013】
(第1実施形態)
図1は、第1実施形態に係る電圧発生装置1の構成図である。図1に示すように、電圧発生装置1は、制御基板2、高圧電源基板10及びドライバ12(緩衝手段)を備える。制御基板2は、制御部(演算部)としてのCPU3、記憶部としてのROM5及びRAM6、並列−直列変換器としてのUART(Universal Asynchronous Receiver Transmitter)送信機7、D/A(Digital/Analogue)コンバータ8、比較器9及びスイッチ13を備える。
【0014】
CPU3は、各種プログラムを実行して、PWM信号の元になる送信データを生成するものである。ROM5及びRAM6は、CPU3に実行させるためのプログラムや各種データを記憶するものである。ドライバ12は、電圧発生装置1が未使用のとき、UART送信機7の出力をシリアル伝送して外部機器に接続するためのものである。スイッチ13は、スイッチ13の端子aとUART送信機7のTX端子とを接続する。スイッチ13の端子cを平均化回路としての累積電圧生成部15の抵抗器R1の一端と接続する。スイッチ13の端子bをドライバ12と接続する。これにより、スイッチ13は、UART送信機7のTX端子と、累積電圧生成部15の抵抗器R1の一端及びドライバ12の入力端の何れか一方とを接続する。
【0015】
D/Aコンバータ8は、電圧発生装置1の出力電圧である目標とする高電圧のスライスレベル(基準電圧)をデジタル信号からアナログ信号に変換して出力するものである。比較器9は、D/Aコンバータ8の出力であるスライスレベルと、高圧電源基板10からのフィードバック電圧である検査電圧とを比較し、出力を制御信号としてUART送信機7のゲート端子としてのTX−RDY端子に入力するものである。
【0016】
高圧電源基板10は、累積電圧生成部15、増幅器11及び検査電圧生成部16を備える。累積電圧生成部15は、抵抗器R1、R2及びコンデンサC1を備え、入力電圧を平滑する。図1に示すように、抵抗器R1は、一端がスイッチ13の端子cと接続され、他の一端が増幅器11の入力端に接続されている。抵抗器R2は、一端を抵抗器R1と増幅器11の入力との接続線に接続し、他の一端を接地させている。コンデンサC1は、一端を抵抗器R1と増幅器11の入力との接続線に接続し、他の一端を接地させている。スイッチ13の切り替えにより、抵抗器R1の一端とUART送信機7の端子TXとが接続される。
【0017】
増幅器11は、累積電圧生成部15で生成された電圧を目標の高電圧に昇圧させるものである。検査電圧生成部16は、抵抗器R3及び抵抗器R4を備える。抵抗器R3及び抵抗器R4は、高電圧を抵抗器R3と抵抗器R4とで分圧して検査電圧を作り出すものであり、抵抗器R3は一端を増幅器の出力端に接続し、他の一端を抵抗器R4の一端と接続している。抵抗器R4の他の一端は接地されている。抵抗器R3と抵抗器R4との接続点における電位は、検査電圧として比較器9に入力される。
ここで、D/Aコンバータ8、比較器9及び検査電圧生成部16は出力制御部17を構成する。
【0018】
図2は、電圧発生装置1に用いられるUART送信機7の内部構成図である。UART送信機7は、CPU3から送出される送信データを格納し、比較器9(図1参照)から出力される制御信号に従って、この送信データを格納した順に読み出して1ビットずつPWM信号として出力するものである。UART送信機7は、内部バス21、バッファとしての送信データFIFO22及びレジスタ23から構成される。さらに、UART送信機7は、比較器9からの制御信号の入力端子TX−RDY25と、PWM信号の出力端子TX24とを備える。
【0019】
内部バス21は、CPU3との間で送信データ等のデータのやり取りを行うものである。送信データFIFO22は、CPU3から受信した送信データを8バイト分格納し、格納した順に読み出して(先入れ先出し)1ビットずつPWM信号として、所定のボーレートで出力するものである。レジスタ23は、UART送信機7の各種設定を保持しておくものである。
【0020】
レジスタ23は、複数のフリップフロップから構成され、UART送信機7の機能を発揮するように設定される。例えば、送信データFIFO22における送信データがすべて読み込まれて、送信データFIFO22がEmptyになったときに、レジスタ23は、割り込み信号26をCPU3に対して出力して、送信データを送信するように送信データ要求割り込みが設定される(送信要求部)。また、他の一つのレジスタ23は、TX−RDY端子25に入力される信号(比較器9からの制御信号)の有無に対応して、送信データ(PWM信号)の送信の開始又は停止を行うように設定される。送信データFIFO22からは、所定のボーレートに従って、送信データが格納された順に読み出されて、1ビットずつPWM信号として出力端子TX24から出力される。
【0021】
本実施形態に係る電圧発生装置1の動作を図3〜図15で説明する。図3は、電圧発生装置1の初期化処理の動作を示すフローチャートである。
まず、CPU3は、UART送信機7からCPU3への送信データ要求割り込みを禁止するように、UART送信機7のレジスタ23に設定する(ステップS101)。次に、CPU3は、UART送信機7のボーレートに対応する通信速度が115200BPS(Bits Per Second)になるように、UART送信機7のレジスタ23に設定する(ステップS102)。これは、UART送信機7の送信データをPWM信号と見なした場合、PWM信号の周波数が約11.5kHzに相当することを意味する。
【0022】
次に、CPU3は、UART送信機7が送信する送信データ(PWM信号)のフォーマットをレジスタ23に設定する。ここでは、送信データは、Data 8bits(パリティ無し)、Start bit 1bit及びStop bit 1bitの合計10bitsから構成される(ステップS103)。次に、CPU3は、UART送信機7からの割り込み要因を、「送信データFIFOがEmptyになったとき」と設定する(ステップS104)。以上の動作により、本電圧発生装置1の初期化処理の動作が終了する。
【0023】
次に、図4を用いて、電圧発生装置1において目標とする高電圧を出力する処理(高圧電源ON処理)について説明する。図4は、電圧発生装置1の高圧電源ON処理の動作を示すフローチャートである。まず、電圧設定処理を実行する(ステップS201)。電圧設定処理の詳細は後記する(図5参照)。これにより、UART送信機7が送信データの送信を開始すると共に、送信データがPWM信号と見なされ、累積電圧生成部15で時間平均され平均電圧が出力される。そして、この平均電圧が増幅器11で増幅されて高電圧が出力する。次に、CPU3は、UART送信機7の送信データ要求割り込みを許可するようにレジスタ23を設定する(ステップS202)。これにより、UART送信機7の送信データFIFOがEmptyになると割り込みが発生するようになる。以上の動作により、電圧発生装置1の高圧電源ON処理の動作が終了する。
【0024】
高圧電源ON処理に基づいて、UART送信機7からPWM信号が出力される。このPWM信号は、前記した制御信号がONのときは、即ち、検査電圧が基準電圧(スライスレベル)よりも低いときは、比較器9は、UART送信機7からPWM信号を出力するように制御信号をONにして、UART送信機7のTX−RDY端子に入力する(図15参照)。そして、検査電圧が基準電圧より高いときは、比較器9はPWM信号の出力を停止するように制御信号をOFFにする。
【0025】
図5は、図4における電圧設定処理の動作の詳細を示すフローチャートである。図6は、設定電圧値(高電圧値)とPWM信号のデューティ比との対応を示すテーブルである。図5に示す電圧設定処理は、前記した高圧電源ON処理において実行されるが、発生している高電圧を変更する際にも実行される。まず、CPU3は、目標とする高電圧を設定電圧としてスライス値(基準電圧)をD/Aコンバータに出力する(ステップS401)。これは、設定電圧xから関数fv()により、D/Aコンバータ8に出力するスライス値を算出する。関数fv(x)は、例えば式1のようになる。
【0026】
fv(x)=255-(255・R6・x)/(Vss・(R5+R6)) ・・・・・ (式1)
但し、
x:設定電圧
R5:増幅抵抗値(kΩ)
R6:増幅抵抗値(kΩ)
Vss:システム電圧(5V)
とする。
【0027】
ここで、増幅抵抗値R5=50000、増幅抵抗値R6=110とし、例えば、設定電圧が1100Vの場合、式1は、
fv(1100)=255−(255×110×1100)/(5×(50000+110))≒131.8
となり、スライス値は、四捨五入して132となる。そして、そのスライス値132をD/Aコンバータに出力する(ステップS401)。次に、ROM5に格納された図6に示すテーブルを用いて、PWM信号をONにしたときのデューティ比(以下、「PWM-Duty」という)を設定する(ステップS402)。例えば、設定電圧が1100Vの場合、PWM-Dutyは23%に設定される。次に、CPU3は、送信データのセット処理を行う(ステップS403)。送信データのセット処理の詳細は、後記する(図7参照)。
【0028】
次に、UART送信機7の送信データFIFO22をクリア(Empty)する(ステップS404)。これは、この電圧設定処理がPWM信号出力中に実行された場合、新たな設定電圧のための送信データを早く送信するためである。次に、送信データの送信処理を実行する(ステップS405)。これは、送信データテーブルSend_Data_t[](図9参照)の送信データをUART送信機7の送信データFIFO22に書き込む処理である。送信処理の詳細は後記する(図12参照)。以上の動作により、電圧発生装置1における電圧設定処理の動作が終了する。
【0029】
図7は、図5における送信データセット処理の動作を示すフローチャートである。図8は、PWM-Dutyと送信データの変換テーブルである。図9(a)は、送信データテーブルであり、図9(b)はその演算過程を示す表である。図10は、UART送信機7の送信データ(PWM信号)を示す図である。
送信データセット処理では、PWM-Dutyより、UART送信機7が送信する送信データを求める(図6参照)。図10に示すように、UART送信機7の送信データは、Start-bitが1bit、Data-bitが8bits、Stop-bitが1bitの計10bitsから構成される。このため、UART送信機7は、例えばPWM-Dutyが10%なら送信データとして“00H”を送信し、PWM-Dutyが90%なら“FFH”を送信する。ここで、H(Hexadecimal)は6進数を示す。
【0030】
しかし、送信データ1バイト単位では、前記したように10bitsから構成されるため、PWM-Dutyは10%刻みでしか設定できない。図11は、送信データの送信例を示す図である。そこで、図11に示すように、例えばPWM-Duty25%では、送信データ“03H”と“01H”とを交互に送信することにより、平均して25%を実現することができる。このように、送信データはデューティ比の時系列データに対応したものとなる。
【0031】
まず、PWM-Dutyから送信データの組み合わせを求める準備として、変数Aに“PWM-Duty×8”を代入し、変数Bに“8”を代入する(ステップS1101)。ここで、変数Aは、UART送信機7の送信データFIFO22(図2)における8バイト分の送信データを求めるための変数である。なお、変数Bはカウンタとなる。次に、変数Cに“A÷B(1の位を四捨五入)”を代入し、変数Bに“B−1“を代入する(ステップS1102)。ここで、変数Cは、求める送信データのPWM-Dutyである。変数Bは、求めた送信データを図9(a)に示す送信データテーブルSend_Data_t[]に格納するポインタ(アドレス)とするため、また、送信データをカウントするために減算する。
【0032】
次に、変数Cから送信データを求める。送信データは、図8に示すPWM-Duty→送信データ変換テーブルであるDuty_2_Data_t[]において、“C÷10”でポインタとしてのアドレスを算出してこのアドレスの送信データを読み出すことにより求められる。このようにして求めた送信データを、図9(a)の送信データテーブルSend_Data_t[]に変数Bの値をアドレスとして書き込む(ステップS1103)。次に、変数AからCを減算した値を変数Aに代入する(ステップS1104)。次に、変数Bの値が0か否か判断する(ステップS1105)。変数Bの値が0でなければステップS1102に進み(S1105のNo)、これにより、ステップS1102〜S1104が8回繰り返されることになる。一方、変数Bの値が0であれば、処理を終了する(ステップS1105のYes)。以上の動作により、電圧発生装置1の送信データセット処理の動作が終了する。
【0033】
具体的に、前記したPWM-Duty25%を例にすると、変数Aに25×8=200が代入され(S1101)、A÷B=200÷8=25を四捨五入した“30”が変数Cに代入され、変数Bの値がB−1=8−1=7に変更され(S1102)、Duty_2_Data_t[30÷10]の値“03H”がSend_Data_t[7]に入る。そして、変数AにA−C=200−30=170が代入され(S1104)、処理がS1102に戻る。これらの処理S1102〜S1104が8回繰り返された変数A、B、(B−1)、Cの変化を図9(b)に示す。これにより、変数Cの値が“20”と“30”とで交互に繰り返されることになり、
図8のDuty_2_Data_t[20÷10]の値“01H”と、Duty_2_Data_t[30÷10]の値“03H”とが交互にSend_Data_t[](図9(a))に入る。
【0034】
図12は、図5における送信処理の動作を示すフローチャートである。ここでいう送信処理は、CPU3からUART送信機7への送信データの書き込みをいう。
まず、変数Bに“0”を代入する(ステップS601)。変数Bは、8バイトの送信データをUART送信機7の送信データFIFO22に書き込むためのカウンタである。次に、UART送信機7の送信データFIFO22がFULLか否かを判断する(ステップS602)。送信データFIFO22がFULLの場合は(ステップS602のYes)、送信処理を終了する。一方、FULLでない場合は(ステップS602のNo)、変数Bの値をアドレス値とした送信データテーブルSend_Data_t[](図9(a)参照)の送信データを取得する(ステップS603)。
【0035】
次に、送信データをUART送信機7の送信データFIFO22に書き込む(ステップS604)。次に、UART送信機7の送信データFIFO22への書き込み回数をカウントするため、変数Bの値を+1カウントアップする(ステップS605)。次に、変数Bの値が8以上か否かを判断する(ステップS606)。ここで、変数Bの値が8以上でなければ(ステップS606のNo)、ステップS602に進み、ステップS602〜ステップS605が8回繰り返される。一方、変数Bの値が8以上であれば(ステップS606のYes)、送信データが送信データFIFO22に8バイト書き込まれたことになり、送信処理を終了する。以上の動作により、電圧発生装置1におけるCPU3からUART送信機7への送信データの送信処理の動作が終了する。
【0036】
図13は、UART送信機7における送信データFIFO22がEmptyのときの送信データ要求割り込み発生処理(送信割り込み処理)の動作を示すフローチャートである。
ここで、UART送信機7のボーレート(通信速度)を115200BPS、送信データFIFOを8バイトとすると、約700μsecごとに、UART送信機7からCPU3へ送信割り込み処理が実行されることになる。まず、UART送信機7で発生した送信データ要求割り込みの割り込み要因をクリアする。これは、CPU3からUART送信機7のレジスタ23の内、割り込みに関するクリアレジスタに“1”を書き込むことにより実行される(ステップS501)。
【0037】
次に、図12に示す送信処理が実行される(ステップS502)。これにより、UART送信機7の送信データFIFO22に送信データが書き込まれる。そして、UART送信機7のボーレートに対応する通信速度を115200BPSとすると、送信データの書き込みを約87μsec以内に実行すれば、送信データが途切れることなく送信される。これは、UART送信機7の送信データが、Start-bit(1bit)、Data-bit(8bits)、Stop-bit(1bit)の計10bitsから構成されるため、10bits÷115200bpsで、データ送信時間に約87μsec必要であるからである。以上の動作により、電源電圧装置1の送信割り込み処理が終了する。
【0038】
図14は、電圧発生装置1の高圧電源OFF処理の動作を示すフローチャートである。
まず、UART送信機7の割り込み設定を「割り込み禁止」にする(ステップS701)。これにより、UART送信機7の送信データFIFO22がEmptyになった時点で送信データの送信が停止し、PWM信号がOFFされたと同等になり、高電圧がOFFされることになる。次に、UART送信機7の送信データFIFO22をクリアする(ステップS702)。これは、UART送信機7おけるレジスタ23の割り込み設定を割り込み禁止にしても、送信データFIFO22がEmptyになるまでPWM信号が出力されるが、送信データFIFO22をクリアすることにより、即時にPWM信号をOFFするためである。
以上の動作により、電圧発生装置1の高圧電源OFF処理の動作が終了する。
【0039】
このように、第1実施形態によれば、UART送信機7から出力される送信データをPWM信号とみなして、目標とする高電圧を発生させることができる。図15は、PWM信号と出力電圧との関係を示す図であるが、基準電圧と検査電圧を比較して、図15に示すように、検査電圧がスライスレベル(基準電圧)よりも低いときは、CPU3が介在することなく、UART送信機7がPWM信号を発生して、目標とする高電圧を発生させることができる。
また、ドライバ12及びスイッチ13が設けられているので、RS−232Cの通信機能を備えている制御基板2を用いて、コストを増加させることなく、PWM制御された高電圧を発生することができる。
【0040】
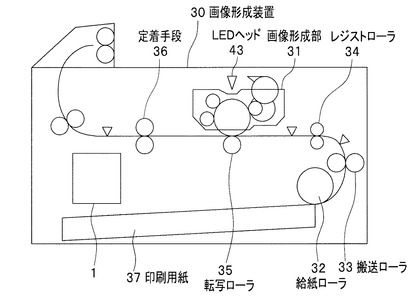
本実施形態に係る電圧発生装置1を図16に示す画像形成装置30に用いることが可能である。
図16は、電圧発生装置1を用いた画像形成装置30を示す図である。
画像形成装置30は、本実施形態に係る電圧発生装置1、トナー像を形成する画像形成部31、光源であるLEDヘッド43、印刷用紙37を取り出す給紙ローラ32、印刷用紙37を搬送する搬送ローラ33、印刷用紙37の傾きの補正を行うレジストローラ34、印刷用紙37に画像形成部31により形成されたトナー像を転写する転写ローラ35、及び、トナー像が転写された印刷用紙37を挟んで圧力と熱とによりトナー像を定着させる定着手段36を備える。
【0041】
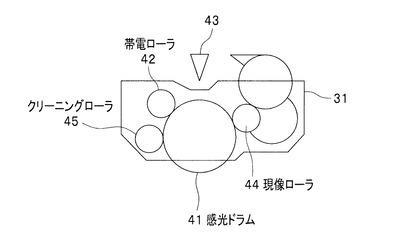
図17は、図16の画像形成部31の詳細を示す図である。
画像形成部31は、光の照射によってその表面の帯電状態を変化させる感光ドラム41、感光ドラム41の表面を一様に帯電させるための帯電ローラ42、帯電ローラ42によって一様に帯電された感光ドラム41に形成しようとする画像に基づいて光の照射を行うLEDヘッド43、LEDヘッド43によって感光ドラム41上に形成された静電潜像にしたがってトナーを付着させ、静電潜像をトナー像に可視化する現像ローラ44、及び、感光ドラム41上に残されたトナーを回収するクリーニングローラ45を備える。
【0042】
画像形成部31では、感光ドラム41は帯電ローラ42によってその表面が一様に帯電され、一様に帯電された感光ドラム41の表面にLEDヘッド43から画像情報に従った光の照射が行われて、感光ドラム41の表面に静電潜像が形成される。このようにして形成された静電潜像は、現像ロ一ラ44によってトナーによる可視像に現像されて、トナー画像となり、転写ローラ35によって印刷用紙37上に転写される。転写ローラ35の転写プロセスにおいて、印刷用紙37に転写されずに感光ドラム41の表面に残ったトナーはクリーニングローラ45によって掻き落とされて回収される。
ここで、帯電ローラ42、現像ローラ44及びクリーニングローラ45の電圧制御は、本実施形態の電圧発生装置1を用いることにより実現される。
【0043】
(変形例)
前記したように高圧電源OFF処理(図14)により、高電圧の出力を停止させたが、増幅器11そのものを停止させることにより、高電圧の出力を停止させてもよい。
【0044】
(第2実施形態)
図18は、第2実施形態に係る電圧発生装置100である。第1実施形態と同様な構成又は機能を示す部位については、その説明の重複を省略する。
電圧発生装置100は、制御基板200、高圧電源基板10及びドライバ12から構成される。制御基板200は、制御部としてのCPU3、記憶部としてのROM50及びRAM6、タイマ14、並列−直列変換器としてのUART送信機7、D/Aコンバータ8、比較器9、及び、スイッチ13を備える。
タイマ14は、CPU3に対して、所定時間が経過したときに定期的に割り込みを発生させるものである。タイマ14を備える点が、第1実施形態と相違する。
高圧電源基板10及びドライバ12は、第1の実施形態と同様なのでその説明を省略する。
【0045】
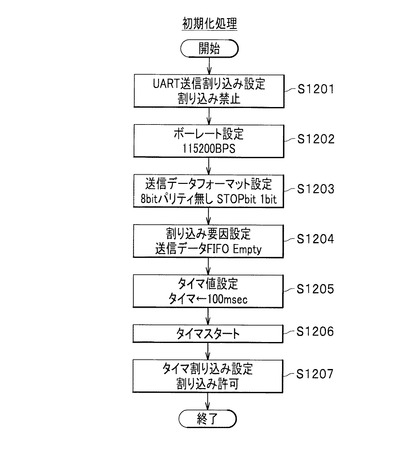
図19は、電圧発生装置100の初期化処理の動作を示すフローチャートである。
まず、CPU3は、UART送信機7からCPU3への送信データ要求割り込みを禁止するように、UART送信機7のレジスタ23を設定する(ステップS1201)。次に、CPU3は、UART送信機7のボーレートが115200BPS(Bits Per Second)になるように、UART送信機7のレジスタ23を設定する(ステップS1202)。これは、UART送信機7の送信データをPWM信号と見なした場合、PWM信号の周波数が約11.5kHzに相当することを意味する。次に、CPU3は、UART送信機7が送信するPWM信号を送信データとしてフォーマットをレジスタ23に設定する。ここでは、送信データは、Data bitが8bits(パリティ無し)、Start bitが1bit、及び、Stop bitが1bitの合計10bitsから構成される(ステップS1203)。
【0046】
次に、CPU3は、送信データFIFO22がEmptyになったときに割り込むように、UART送信機7からの割り込み要因をレジスタ23に設定する(ステップS1204)。次に、CPU3は、割り込みを発生させる所定時間として100msにタイマ14を設定する(ステップS1205)。次に、CPU3は、タイマ14の動作をスタートさせる(ステップS1206)。次に、タイマ14からのタイマ割り込みを割り込み許可に設定する(ステップS1207)。これにより、100msec間隔でタイマ割り込みが発生し、タイマ割り込み処理が実行される。以上の動作により、電圧発生装置100の初期化処理の動作が終了する。
【0047】
次に、高圧電源ON処理の動作は、図4に示す第1実施形態と同様である。ここでは、図4において、第1実施形態(図4ステップS201参照)と異なる電圧設定処理について図20を用いて説明する。図20は、第2実施形態における電圧設定処理を示すフローチャートである。
【0048】
まず、CPU3は、目標とする高電圧を設定電圧としてスライス値(基準電圧)をD/Aコンバータに出力する。これは、設定電圧xから関数fv()により、D/Aコンバータ8に設定するスライス値を算出する。スライス値の算出方法は第1実施形態と同様なので省略する。そして、スライス値である“132”をD/Aコンバータ8に設定する(ステップS801)。
【0049】
次に、設定電圧よりPWM-Duty初期値(PWM-Duty)、PWM-Duty最大値(PWM-Dutymax)、PWM-Duty最小値(PWM-Dutymin)及びPWM-ON-Duty目標値(PWM-ON-Dtgt)を求める。
図21は、設定電圧ごとのPWM-Duty初期値、PWM-Duty最大値、PWM-Duty最小値及びPWM-ON-Duty目標値を示すテーブルである。設定電圧を元に、図21に示す表より各値を抽出し、それぞれ、パラメータPWM-Duty、PWM-Dutymax、PWM-Dutymin及びPWM-ON-Dtgtに格納する(ステップS802)。例えば、設定電圧が1100Vの場合、PWM-Dutyは23%、PWM-Dutymaxは26%、PWM-Dutyminは20%、PWM-ON-Dtgtは50%となる。次に、送信データセット処理を実行する(ステップS803)。これは、第1実施形態において図7で説明した送信データセット処理と同様である。これにより、図9に示す送信データテーブルSend_Data_t[]に送信データがセットされる。
【0050】
次に、CPU3は、UART送信機7の送信データFIFO22をクリアする(ステップS804)。これは、この電圧設定処理がPWM信号の送出中に実行された場合、新たな設定電圧のための送信データを早く送信するためである。次に、CPU3は、送信データの送信処理を実行する(ステップS805)。これは、送信データテーブルSend_Data_t[]の送信データをUART送信機7の送信データFIFO22に書き込む処理である。送信処理の詳細は後記(図22参照)する。以上の動作により、電圧発生装置100の電圧設定処理の動作が終了する。
【0051】
図22は、電圧発生装置100の送信処理の動作を示すフローチャートである。ここでいう送信処理とは、CPU3からUART送信機7への送信データの書き込みをいう。
まず、CPU3は変数Bに0を代入する(ステップS901)。変数Bは、8バイトの送信データをUART送信機7の送信データFIFO22に書き込むためのカウンタである。
次に、CPU3は、UART送信機7の送信データFIFO22がFULLか否か判断する(ステップS902)。送信データFIFO22がFULLの場合は(ステップS902のYes)、ステップS907に進む。FULLでない場合は(ステップS902のNo)、ステップS903に進む。
【0052】
次に、変数Bの値をアドレス値とした送信データテーブルSend_Data_t[](図9参照)の送信データを取得する(ステップS903)。次に、送信データをUART送信機7の送信データFIFO22に書き込む(ステップS904)。次に、UART送信機7の送信データFIFOへ書き込んだ送信データのバイト数をカウントするため、変数Bの値を+1カウントアップする(ステップS905)。次に、変数Bの値が8以上かどうか判断する(ステップS906)。変数Bの値が8以上でなければ(ステップS906のNo)、ステップS902に進み、ステップS902〜905が8回繰り返される。一方、変数Bの値が8以上であれば(ステップS906のYes)、送信データが送信データFIFO22に8バイト書き込まれたことになる。次に、UART送信機7が送信した送信データの送信バイト数を数えるため、変数Txbに変数Bの値を加算する(ステップS907)。これは、PWM-ON-Dutyにより、PWM-Dutyを補正する計算に用いられる。以上の動作により、電圧発生装置100の送信処理の動作が終了する。
【0053】
第2実施形態における送信機7の送信データFIFO22による送信データの送信割り込み処理は、図13に示す第1実施形態における送信割り込み処理と同様なので説明を省略する。
【0054】
図23は、電圧発生装置100のタイマ割り込み処理の動作を示すフローチャートである。タイマ割り込み処理は、100msecごとに実行される。このタイマ割り込み処理は、タイマ割り込み1周期の間(100msec)にUART送信機7が送信した送信データ量を元にPWM-Dutyを補正するために行われる。
【0055】
まず、高圧電源がON状態か否かを確認する(S1001)。ON状態でない場合は(ステップS1001のNo)、CPU3は、PWM-Dutyの補正モードをクリアするため、RAM6に設定されているレジスタの補正モードを0にする(ステップS1009)。
一方、高圧電源がON状態であれば(ステップS1001のYes)、PWM-Duty補正モードか否かを確認する(ステップS1002)。なお、ステップS1002が最初に実行されるときはPWM-Duty補正モードではないため(ステップS1002のNo)、PMTM-Duty補正モードをセットするため、補正モードを“1”にする(ステップS1010)。
【0056】
PWM-Duty補正モードであった場合は(ステップS1002のYes)、PWM-ON-Dutyを計算する。ここで、UART送信機7のボーレートを115200bps、タイマの割り込み周期を100msecとすると、タイマ割り込み1周期の間の送信データの最大送信バイト数は、115200÷10×0.1=1152バイトとなり、1552バイトとなる。実際の送信バイト数は、変数Txbの値であり、PWM-ON-Dutyを計算して変数Dに入れる変数Dは、D=Txb/1152×100となる。
【0057】
次に、PWM-ON-Dutyである変数Dと、PWM-ON-Dutyの目標値であるPWM-ON-Dtgtとを比較する(ステップS1004)。変数DがPWM-ON-Dtgtより小さい場合は(ステップS1004のYes)、PWM-DutyとPWM-Duty最小値であるPWM-Dutyminとを比較する(ステップS1005)。PWM-DutyがPWM-Dutyminより大きい場合は(ステップS1005のYes)、PWM-Dutyから1減算する(ステップS1006)。これは、PWM-ON-Dutyが目標値であるPWM-ON-Dtgtより小さいため、PWM-Dutyを小さくすることにより、PWM-ON-Dutyを大きくするためである。
【0058】
次に、送信データセット処理を実行する(ステップS1007)。この処理は、図7に示す送信データセット処理と同様なので説明は省略する。これにより、図9に示す送信データテーブルSend_Data_t[]に送信データがセットされる。次に、タイマ割り込み1周期の間の送信データの送信バイト数をクリアするため、変数Txbに0を入れる(ステップS1008)。
【0059】
一方、変数Dの値がPWM-ON-Dtgtより大きい場合は(ステップS1004でNo)、PWM-ON-Dutyである変数Dと、PWM-ON-Dutyの目標値であるPWM-ON-Dtgtとを比較する(ステップS1011)。変数Dの値がPWM-ON-Dtgtより大きい場合は(ステップS1011のYes)、PWM-DutyとPWM-Duty最大値であるPWM-Dutymaxとを比較する(ステップS1012)。ここで、PWM-DutyがPWM-Dutymaxより小さい場合は(ステップS1012でYes)、PWM-Dutyに1を加算する(ステップS1013)。これは、PWM-ON-Dutyが目標値であるPWM-ON-Dtgtより大きいため、PWM-Dutyを大きくすることにより、PWM-ON-Dutyを小さくさせるためである。
【0060】
ステップS1013終了後はステップS1007に進む。なお、ステップS1005でPWM-DutyがPWM-Dutymin以下の場合、ステップS1011で変数DがPWM-ON-Dtgtと同じ場合、及び、ステップS1012でPWM-DutyがPWM-Dutymax以上の場合は、ステップS1008に進む。
以上の動作により、電圧発生装置100のタイマ割り込み処理の動作が終了する。
【0061】
第2実施形態における高圧電源OFF処理の動作は、第1実施形態と同様であるため説明を省略する。
【0062】
第2実施形態によれば、UART送信機7が所定時間に出力した送信データ(PWM信号)の量と、所定時間に出力可能な送信データ(PWM信号)の量とに基づいてデューティ比を補正することにより、出力電圧を制御することが可能になる。
【符号の説明】
【0063】
1、100 電圧発生装置
2、200 制御基板
3 CPU(演算部)
5 ROM(記憶部)
6 RAM(記憶部)
7 UART送信機(送信機)
8 D/Aコンバータ(基準電圧生成部)
9 比較器
10 高圧電源基板
11 増幅器
12 ドライバ(緩衝手段)
13 スイッチ
14 タイマ
15 累積電圧生成部
16 検査電圧生成部
17 出力制御部
21 内部バス
22 送信データFIFO(バッファ)
23 レジスタ(送信要求部)
30 画像形成装置
31 画像形成部
32 給紙ローラ
33 搬送ローラ
34 レジストローラ
35 転写ローラ(転写部)
36 定着手段
37 印刷用紙
41 感光ドラム
42 帯電ローラ(帯電部)
43 LEDヘッド(光源)
44 現像ローラ(現像装置)
45 クリーニングローラ(クリーニング部)
【特許請求の範囲】
【請求項1】
PWM信号を用いて出力電圧を発生する電圧発生装置であって、
前記出力電圧の値とPWM信号のデューティ比とを対応付けた設定電圧テーブルを格納した記憶部と、
前記出力電圧の値に対応したデューティ比を前記設定電圧テーブルから取得し、前記デューティ比の時系列データに対応する送信データを生成して出力する演算部と、
前記演算部から受信した送信データを格納し、格納した送信データをその格納した順番に読み出して、PWM信号として直列送信するバッファと、この送信データをバッファからすべて読み出したときは、前記演算部へ送信データの送信を要求する送信要求部とを有する直列送信機と、
前記PWM信号からその平均電圧を生成する累積電圧生成部と、
前記累積電圧生成部で生成された平均電圧を増幅して出力電圧を生成する増幅器と、
前記出力電圧に基づく制御信号を生成して、この出力電圧の出力/停止を制御する出力制御部と、を備えること
を特徴とする電圧発生装置。
【請求項2】
前記出力制御部は、
前記出力電圧に対応する基準電圧を生成する基準電圧生成部と、
前記出力電圧を所定の抵抗値で分割して検査電圧を生成する検査電圧生成部と、
前記基準電圧と、前記検査電圧とを入力して比較する比較器とを備え、
前記検査電圧が前記基準電圧より低下したときは、前記比較器は、前記PWM信号を出力させるようにして前記直列送信機を制御すること
を特徴とする請求項1に記載の電圧発生装置。
【請求項3】
前記送信要求部は、前記バッファから送信データをすべて読み出したときは、前記演算部へ割り込み信号を出力して、前記送信データの送信を要求すること
を特徴とする請求項1又は請求項2に記載の電圧発生装置。
【請求項4】
前記直列送信機が所定時間に出力した送信データの量と、前記直列送信機が前記所定時間に出力可能な送信データの量とに基づいて前記デューティ比を補正することにより、前記出力電圧を制御すること
を特徴とする請求項1ないし請求項3の何れか一項に記載の電圧発生装置。
【請求項5】
外部機器とのシリアル伝送を緩衝する緩衝手段と、
前記直列送信機の出力端子と、前記累積電圧生成部の入力端子及び前記緩衝手段の何れか一方とを接続するスイッチ回路とを備えること
を特徴とする請求項1ないし請求項4の何れか一項に記載の電圧発生装置。
【請求項6】
少なくとも、
感光ドラムと、
前記感光ドラムの表面を一様に帯電させるための帯電部と、
前記帯電部によって一様に帯電された前記感光ドラムに、形成する画像に基づいて光の照射を行う光源と、
前記光の照射によって前記感光ドラム上に形成された静電潜像にしたがってトナーを付着させ、静電潜像をトナー画像に可視化する現像装置と、
前記感光ドラム上に残されたトナーを回収するクリーニング部と、
印刷用紙に前記トナー画像を転写する転写部と、
請求項1ないし請求項5の何れか一項に記載の電圧発生装置と、を備え、
前記電圧発生装置は、前記帯電部と前記現像装置と前記転写部との何れか一つ、又は、これらの組み合わせに印加するバイアス電圧を発生することを
を特徴とする画像形成装置。
【請求項1】
PWM信号を用いて出力電圧を発生する電圧発生装置であって、
前記出力電圧の値とPWM信号のデューティ比とを対応付けた設定電圧テーブルを格納した記憶部と、
前記出力電圧の値に対応したデューティ比を前記設定電圧テーブルから取得し、前記デューティ比の時系列データに対応する送信データを生成して出力する演算部と、
前記演算部から受信した送信データを格納し、格納した送信データをその格納した順番に読み出して、PWM信号として直列送信するバッファと、この送信データをバッファからすべて読み出したときは、前記演算部へ送信データの送信を要求する送信要求部とを有する直列送信機と、
前記PWM信号からその平均電圧を生成する累積電圧生成部と、
前記累積電圧生成部で生成された平均電圧を増幅して出力電圧を生成する増幅器と、
前記出力電圧に基づく制御信号を生成して、この出力電圧の出力/停止を制御する出力制御部と、を備えること
を特徴とする電圧発生装置。
【請求項2】
前記出力制御部は、
前記出力電圧に対応する基準電圧を生成する基準電圧生成部と、
前記出力電圧を所定の抵抗値で分割して検査電圧を生成する検査電圧生成部と、
前記基準電圧と、前記検査電圧とを入力して比較する比較器とを備え、
前記検査電圧が前記基準電圧より低下したときは、前記比較器は、前記PWM信号を出力させるようにして前記直列送信機を制御すること
を特徴とする請求項1に記載の電圧発生装置。
【請求項3】
前記送信要求部は、前記バッファから送信データをすべて読み出したときは、前記演算部へ割り込み信号を出力して、前記送信データの送信を要求すること
を特徴とする請求項1又は請求項2に記載の電圧発生装置。
【請求項4】
前記直列送信機が所定時間に出力した送信データの量と、前記直列送信機が前記所定時間に出力可能な送信データの量とに基づいて前記デューティ比を補正することにより、前記出力電圧を制御すること
を特徴とする請求項1ないし請求項3の何れか一項に記載の電圧発生装置。
【請求項5】
外部機器とのシリアル伝送を緩衝する緩衝手段と、
前記直列送信機の出力端子と、前記累積電圧生成部の入力端子及び前記緩衝手段の何れか一方とを接続するスイッチ回路とを備えること
を特徴とする請求項1ないし請求項4の何れか一項に記載の電圧発生装置。
【請求項6】
少なくとも、
感光ドラムと、
前記感光ドラムの表面を一様に帯電させるための帯電部と、
前記帯電部によって一様に帯電された前記感光ドラムに、形成する画像に基づいて光の照射を行う光源と、
前記光の照射によって前記感光ドラム上に形成された静電潜像にしたがってトナーを付着させ、静電潜像をトナー画像に可視化する現像装置と、
前記感光ドラム上に残されたトナーを回収するクリーニング部と、
印刷用紙に前記トナー画像を転写する転写部と、
請求項1ないし請求項5の何れか一項に記載の電圧発生装置と、を備え、
前記電圧発生装置は、前記帯電部と前記現像装置と前記転写部との何れか一つ、又は、これらの組み合わせに印加するバイアス電圧を発生することを
を特徴とする画像形成装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【公開番号】特開2012−88489(P2012−88489A)
【公開日】平成24年5月10日(2012.5.10)
【国際特許分類】
【出願番号】特願2010−234474(P2010−234474)
【出願日】平成22年10月19日(2010.10.19)
【出願人】(591044164)株式会社沖データ (2,444)
【Fターム(参考)】
【公開日】平成24年5月10日(2012.5.10)
【国際特許分類】
【出願日】平成22年10月19日(2010.10.19)
【出願人】(591044164)株式会社沖データ (2,444)
【Fターム(参考)】
[ Back to top ]