
電子キーシステムのキー位置判定装置
【課題】電子キーの位置をより精度よく検出することができる電子キーシステムのキー位置判定装置を提供する。
【解決手段】車両の運転席アンテナ及び助手席アンテナから交互に電波を送信して、これら電波を電子キーが受信したときの磁界強度Hd,Hpと電波到来方向Kd,Kpとを算出する。そして、磁界強度Hd,Hpの大小を比較して、電子キーの車外位置を判定する。このとき、磁界強度Hd,Hpのうち高い側が磁界強度範囲Eaに位置して、単なる大小判定ではキー位置を判定できない場合、電波到来方向Kd,Kpの電波角度差θxからキー位置を判定する。電波角度差θxが重複範囲Ebに位置してキー位置を判定できない場合、電波角度差θx及び2つの磁界強度Hd,Hpを繋いだ三角線25を算出し、この三角線25が成す角度θrにより、キー位置を最終判断する。
【解決手段】車両の運転席アンテナ及び助手席アンテナから交互に電波を送信して、これら電波を電子キーが受信したときの磁界強度Hd,Hpと電波到来方向Kd,Kpとを算出する。そして、磁界強度Hd,Hpの大小を比較して、電子キーの車外位置を判定する。このとき、磁界強度Hd,Hpのうち高い側が磁界強度範囲Eaに位置して、単なる大小判定ではキー位置を判定できない場合、電波到来方向Kd,Kpの電波角度差θxからキー位置を判定する。電波角度差θxが重複範囲Ebに位置してキー位置を判定できない場合、電波角度差θx及び2つの磁界強度Hd,Hpを繋いだ三角線25を算出し、この三角線25が成す角度θrにより、キー位置を最終判断する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、電子キーの位置を判定する電子キーシステムのキー位置判定装置に関する。
【背景技術】
【0002】
従来、車両キーとしての電子キーから無線によりIDコードを車両に送信してID照合を実行する電子キーシステムが広く使用されている。この電子キーシステムには、車両からIDコード返信要求としてリクエストを送信し、このリクエストに応答して電子キーが返信してきたIDコードによりID照合を行うキー操作スマートシステムがある。キー操作フリーシステムには、車外でID照合が成立すると、ドアロック施解錠が許可又は実行されるスマートエントリーシステムと、車内でID照合が成立すると、車内のエンジンスイッチの単なる押し操作のみでエンジン始動が可能となるワンプッシュエンジンスタートシステムとがある。
【0003】
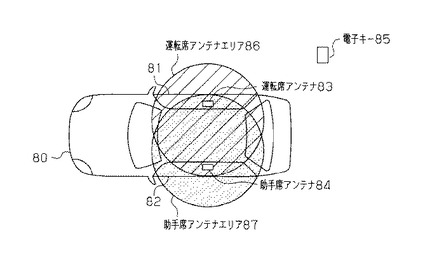
この電子キーシステムの一種には、図9に示すように、車両80の運転席ドア81側(車体右側)にアンテナ83を配置し、助手席ドア82側(車体左側)にアンテナ84を設置し、これらアンテナ83,84からの送信電波に対して電子キー85が返してきた応答の論理判定によってキー位置を判定する技術(特許文献1,2等)が考案されている。この論理判定キー位置検出方式は、車体右側に設置された運転席アンテナ83と、車体左側に設置された助手席アンテナ84とから順にリクエストを送信して、運転席アンテナエリア86と助手席アンテナエリア87とを順に形成し、これらリクエストに対して電子キー85が返信するIDコード、即ち応答の論理判定によってキー位置を判定する。
【0004】
例えば、運転席アンテナ83のリクエストに対して電子キー85からの応答があり、助手席アンテナ84のリクエストに対して電子キー85から応答がないと、電子キー85が車外に位置すると判定する。また、運転席アンテナ83のリクエストに対して電子キー85からの応答がなく、助手席アンテナ84からのリクエストに対して電子キー85の応答があれば、電子キー85が車外に位置すると判定する。さらに、運転席アンテナ83のリクエストと助手席アンテナ84のリクエストとに対して両方とも応答があれば、電子キー85が車内に位置していると判定する。
【0005】
図9に示す論理判定キー位置検出方式は、車体右側と車体左側とに設けた一対のアンテナで車外と車内との両方の位置を見ることができる。よって、論理判定キー位置検出方式は、例えば車外アンテナとして各ドアにアンテナを設置しつつ、更に車内アンテナとして車内に複数のアンテナを設置して電子キーの位置を検出する場合に比べて、アンテナを車体の左右にのみ設置すればよい分だけ、アンテナ本数を少なく抑えることができる利点がある。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2004−84406号公報
【特許文献2】特開2005−76329号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
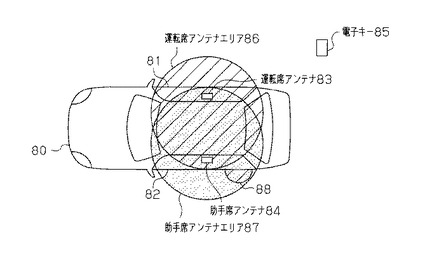
ところで、論理判定キー位置検出方式は、少ないアンテナで車外又は車内を判定するため、アンテナエリア86,87を極力広くとらなければならない現状がある。しかし、アンテナエリア86,87を広くとると、図10に示すように、アンテナ搭載側に対して反対側に電波が漏れて、漏れ通信エリア88が形成されることがある。この場合、電子キー2が漏れ通信エリア88に位置すると、電子キー2がアンテナ反対側に位置するにも拘らず、通信が成立してしまうので、電子キー2の位置が誤検出される。よって、これがドアロック施解錠の誤動作に繋がっていた。
【0008】
本発明の目的は、電子キーの位置をより精度よく検出することができる電子キーシステムのキー位置判定装置を提供することにある。
【課題を解決するための手段】
【0009】
前記問題点を解決するために、本発明では、通信マスタからのID返信要求に応答して電子キーが返信してきたIDコードによりID照合を行う電子キーシステムのキー位置判定装置において、前記通信マスタの一アンテナ及び他アンテナから交互に電波が送信された際、各電波を前記電子キーが受信したときのそれぞれの受信強度を算出する受信強度算出手段と、前記した2電波を各々受信した際の電波到来方向を算出する電波方向算出手段と、前記2つ受信強度を比較し、該受信強度の高い側が設定強度範囲内に位置するか否かを確認することでキー位置を判定する第1判定手段と、前記第1判定手段でキー位置を判定できない場合、前記一アンテナからの電波到来方向と前記他アンテナからの電波到来方向との電波角度差を基に、キー位置を判定する第2判定手段と、前記第2判定手段でキー位置を判定できない場合、前記2つ受信強度及び前記電波角度の3点を同一グラフ上に並べた正規化グラフを使用し、当該3点を繋ぐことでできる三角線の頂点の成す角度を基にキー位置を判定する第3判定手段とを備えたことを要旨とする。
【0010】
この構成によれば、通信マスタの一アンテナ及び他アンテナから交互に電波を発信し、これら電波が電子キーに到達した際の各電波の受信強度と電波到来方向とを算出する。そして、まずは第1判定手段によって、単に一アンテナからの電波の受信強度と、他アンテナからの電波の受信強度とを比較してキー位置を判定する。ここで、一方が他方に対して極端に高い値をとれば、キー位置判定は可能であるが、例えば受信強度が設定強度範囲内にある場合には、キー位置を正確に判定できない。
【0011】
第1判定手段でキー位置を判定できない場合、続いては第2判定手段によって、一アンテナからの電波到来方向と、他アンテナからの電波到来方向との電波角度差を算出し、この電波角度差によりキー位置を判定する。このとき、電波角度差が所定範囲の値をとれば、問題なくキー位置を判定できるが、正確にキー位置を判定できない範囲をとった場合には、キー位置を正確に判定できない。
【0012】
第2判定手段でキー位置を判定できない場合、続いては第3判定手段によって、一アンテナからの電波の受信強度と、他アンテナからの電波の受信強度と、これらの電波角度差とを、同一グラフ上に並べた正規化グラフ上において、これら3点を繋げて三角線を算出し、この線によってできる角度からキー位置を判定する。このため、電波角度差でキー位置が判定できなくても、問題なくキー位置を最終判断することが可能となる。
【0013】
このように、本構成の場合、一アンテナからの電波と他アンテナからの電波の受信強度と電波到来方向を使用し、まずは最初に単に受信強度でキー位置を判定し、受信強度でキー位置を判定できない場合には電波角度差によりキー位置を判定し、電波角度差でキー位置を判定できない場合には、正規化グラフでとキー位置を判定するというように、複数の判定方式によりキー位置を判定する。よって、電子キーの判定位置を、より正確に切り分けることが可能となるので、より精度よく電子キーの位置を判定することが可能となる。
【0014】
本発明では、前記一アンテナ及び他アンテナの通信エリアは、前記通信マスタの室外及び室内の両方を補完する範囲で形成され、キー位置判定は、前記電子キーが前記通信マスタの室外及び室内のどちらに位置するのかを判定することを要旨とする。
【0015】
この構成によれば、キー位置判定を室内外判定に使用したので、電子キーが室外及び室内のどちらに位置するのかを、より正確に判定することが可能となる。
本発明では、前記アンテナから前記電子キーに送信される前記電波は、前記電子キーにIDコードの返信を求める前記ID返信要求の信号であって、キー位置判定は、前記通信マスタと前記電子キーとが前記ID照合する過程で実行されることを要旨とする。
【0016】
この構成によれば、ID照合の過程でキー位置判定も実行することとしたので、これら処理を一通信課程で同時に実行することが可能となる。
【発明の効果】
【0017】
本発明によれば、電子キーの位置をより精度よく検出することができる。
【図面の簡単な説明】
【0018】
【図1】一実施形態におけるキー位置判定装置の概略構成を示す構成図。
【図2】車両のアンテナエリアのイメージを示す概念図。
【図3】(a)は電子キーが運転席側車外に位置する状態を示す概念図、(b)は電子キーが助手席側車外に位置する状態を示す概念図、(c)は電子キーが車内に位置する状態を示す概念図。
【図4】(a)は助手席側に誤判定エリアが含まれた状態を示す磁界強度マップ図、(b)は運転席側に誤判定エリアが含まれた状態を示す磁界強度マップ図。
【図5】各点がプロットされた正規化グラフを示すグラフ図。
【図6】三角線により取り得る角度を示した正規化グラフのグラフ図。
【図7】運転席アンテナや助手席アンテナの取り付け角度の調整を示す模式図。
【図8】スマート通信の通信シーケンスを示すタイミングチャート。
【図9】従来における電子キーシステムの概略構成を示す模式図。
【図10】車両にアンテナの漏れエリアが形成された状態を示す模式図。
【発明を実施するための形態】
【0019】
以下、本発明を具体化した電子キーシステムのキー位置判定装置の一実施形態を図1〜図8に従って説明する。
図1及び図2に示すように、車両1には、無線によりキー照合を行う電子キーシステムの一種として、車両1からの問い合せに電子キー2が応答してID(Identification)照合を実行するキー操作フリーシステム3が設けられている。このキー操作フリーシステム3には、実際のキー操作を行うことなくドア開閉の一連の操作過程の中でドアロックの施解錠が実行されるスマートエントリーシステムと、車内(室内)に設置されたプッシュ式のエンジンスイッチ4を押し操作するのみでエンジンを始動することが可能なワンプッシュエンジンスタートシステムとがある。なお、車両1が通信マスタに相当し、キー操作フリーシステム3が電子キーシステムに相当する。
【0020】
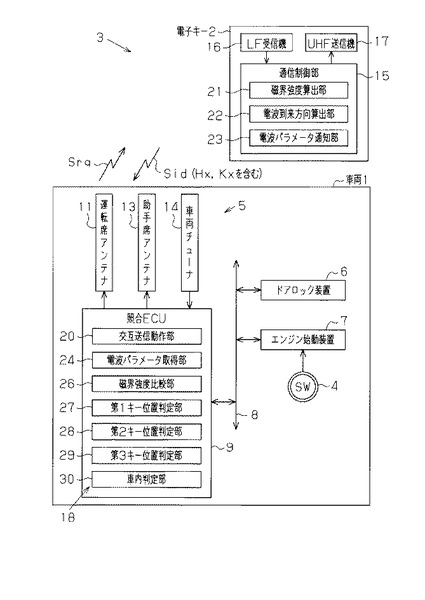
この場合、車両1には、電子キー2との間でID照合を実行するキー照合装置5と、ドアロック動作を管理するドアロック装置6と、エンジンの動作を管理するエンジン始動装置7とが設けられ、これらが車内バス8によって接続されている。キー照合装置5には、同装置5のコントロールユニットとして照合ECU(Electronic Control Unit)9が設けられている。照合ECU9のメモリ(図示略)には、車両1と組みをなす電子キー2のIDコードが登録されている。
【0021】
照合ECU9には、運転席ドア10(図2参照)の周囲にLF(Low Frequency)帯の電波を発信する運転席側車外発信機(以降、運転席アンテナ11と記す)と、助手席ドア12(図2参照)の周囲にLF帯の電波を発信する助手席側車外発信機(以降、助手席アンテナ13と記す)と、UHF(Ultra High Frequency)帯の電波を受信する車両チューナ14とが接続されている。これらアンテナ11,13は、例えば車体左右のピラーにそれぞれ設けられ、電子キー2に対するID返信要求としてリクエスト信号Srqを送信可能となっている。なお、アンテナ11,13が一アンテナ及び他アンテナを構成する。
【0022】
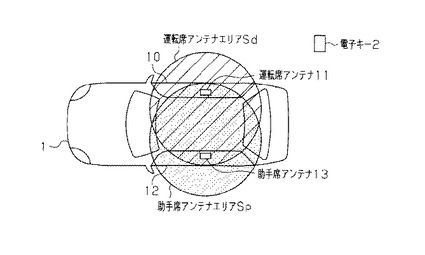
図2に示すように、運転席アンテナ11は、運転席側車外及び車内に通信エリア(運転席アンテナエリアSd)を形成する送信強度で電波送信する。助手席アンテナ13は、助手席側車外及び車内に通信エリア(助手席アンテナエリアSp)を形成する送信強度で電波送信する。本例の場合、電子キー2の基本的な位置判定として、運転席アンテナ11からの電波を電子キー2が強く受信する際、電子キー2の位置が運転席側車外と判定され、助手席アンテナ13からの電波を電子キー2が強く受信する際、電子キー2の位置が運転席側車外と判定される。また、運転席アンテナ11からの電波と、助手席アンテナ13からの電波とを、ともに受信する際、電子キー2の位置が車内と判定される。
【0023】
図1に示すように、電子キー2には、電子キー2の動作を統括制御する通信制御部15が設けられている。通信制御部15のメモリ(図示略)には、キー固有のIDとしてIDコードが登録されている。通信制御部15には、LF帯の電波を受信可能なLF受信機16と、UHF帯の電波を送信可能なUHF送信機17とが接続されている。LF受信機16は、X軸アンテナとY軸アンテナとZ軸アンテナとを備えた3軸受信アンテナであって、各アンテナがコイルアンテナにより形成されている。電子キー2は、LF受信機16でリクエスト信号Srqを受信すると、IDコードを含むID信号SidをUHF送信機17によりUHF帯の電波で送信する。
【0024】
照合ECU9は、リクエスト信号Srqに対する応答として電子キー2からID信号Sidを受信すると、ID照合としてスマート照合を実行する。照合ECU9は、車外(室外)の電子キー2とスマート照合、即ち車外照合が成立することを確認すると、ドアロック装置6によるドアロック施解錠を実行又は許可する。また、照合ECU9は、車内の電子キー2とスマート照合、即ち車内照合が成立することを確認すると、エンジンスイッチ4のプッシュ操作によるエンジン始動及び電源遷移を許可する。
【0025】
図1に示すように、本例のキー操作フリーシステム3には、運転席アンテナ11及び助手席アンテナ13から電波(リクエスト信号Srq)が交互送信された際、各電波を電子キー2が受信したときのそれぞれの磁界強度Hxと、これら電波の電波角度差θxとを基にキー位置を判定するキー位置判定装置18が設けられている。本例のキー位置判定装置18は、運転席アンテナ11からの電波を電子キー2が受信した際の運転席側磁界強度Hdと、助手席アンテナ13からの電波を電子キー2が受信した際の助手席側磁界強度Hpとの大小関係からキー位置を判定し、この判定でキー位置を確定できない場合、電波角度差θxからキー位置を判定し、それでもキー位置を判定できない場合、図5や図6に示す正規化グラフ19を使用してキー位置を判定する。なお、磁界強度Hxが受信強度に相当する。
【0026】
この場合、照合ECU9には、一対の運転席アンテナ11及び助手席アンテナ13を交互に電波送信させる交互送信動作部20が設けられている。交互送信動作部20は、例えば車両1が駐車状態の際や、車外ドアハンドルノブのロックボタンが押されて施錠操作された際、これらアンテナ11,13からリクエスト信号Srqを交互送信して車外通信を開始する。また、交互送信動作部20は、例えばカーテシスイッチ等により運転者の乗車を確認すると、このときもアンテナ11,13からリクエスト信号Srqを交互送信して車内通信を開始する。
【0027】
通信制御部15には、電子キー2で受信した電波の受信強度(RSSI:Received Signal Strength Indicator)を、磁界強度Hxとして算出する磁界強度算出部21が設けられている。磁界強度算出部21は、運転席アンテナ11からのリクエスト信号Srqを電子キー2で受信した際、このときの磁界強度Hxを運転席側磁界強度Hdとして算出し、助手席アンテナ13からのリクエスト信号Srqを電子キー2で受信した際、このときの磁界強度Hxを助手席側磁界強度Hpとして算出する。また、磁界強度算出部21は、LF受信機16(3軸アンテナ)の3軸の受信強度のベクトル合成値を使用して、これら磁界強度Hd,Hpを算出する。なお、磁界強度算出部21が受信強度算出部を構成する。
【0028】
通信制御部15には、運転席アンテナ11及び助手席アンテナ13から受信した各電波の電波到来方向Kxを算出する電波到来方向算出部22が設けられている。LF受信機16がアダプティブアレーアンテナの場合、電波到来方向算出部22は、LF受信機16の各アンテナ素子をアダプティブ制御して電波到来方向Kxを算出する。電波到来方向算出部22は、運転席アンテナ11からのリクエスト信号Srqを電子キー2で受信した際、このときの電波到来方向Kxを運転席側電波到来方向Kdとして算出し、助手席アンテナ13からのリクエスト信号Srqを電子キー2で受信した際、このときの電波到来方向Kxを助手席側電波到来方向Kpとして算出する。なお、電波到来方向算出部22が電波方向算出手段を構成する。
【0029】
通信制御部15には、電子キー2で算出した磁界強度Hxや電波到来方向Kxをスマート通信の過程で車両1に通知する電波パラメータ通知部23が設けられている。電波パラメータ通知部23は、電子キー2がリクエスト信号Srqに応答してID信号Sidを車両1に送信する際、このID信号Sidに磁界強度Hx及び電波到来方向Kxのデータを含ませて送信する。即ち、ID信号Sidには、電子キー2のIDコードと、磁界強度データ及び電波到来方向データ(ともにデジタル値)とが含まれている。電波パラメータ通知部23は、運転席アンテナ11からのリクエスト信号Srqに応答してID信号Sidを返信する際、このID信号Sidに運転席側磁界強度Hd及び運転席側電波到来方向Kdを乗せて車両1に通知し、助手席アンテナ13からのリクエスト信号Srqに応答してID信号Sidを返信する際、このID信号Sidに助手席側磁界強度Hp及び助手席側電波到来方向Kpを乗せて車両1に通知する。なお、電波パラメータ通知部23が受信強度算出手段及び電波方向算出手段を構成する。
【0030】
照合ECU9には、スマート通信の際に電子キー2から磁界強度Hxを取得する電波パラメータ取得部24が設けられている。電波パラメータ取得部24は、スマート通信の際、ID信号Sidに含まれる磁界強度データ及び電波到来方向データを参照して、磁界強度Hx及び電波到来方向Kxを取得する。電波パラメータ取得部24は、運転席アンテナ11を車両送信アンテナとして使用したときの運転席側磁界強度Hd及び運転席側電波到来方向Kdと、助手席アンテナ13を車両送信アンテナとして使用したときの助手席側磁界強度Hp及び運転席側電波到来方向Kdとを取得する。なお、電波パラメータ取得部24が受信強度算出手段及び電波方向算出手段を構成する。
【0031】
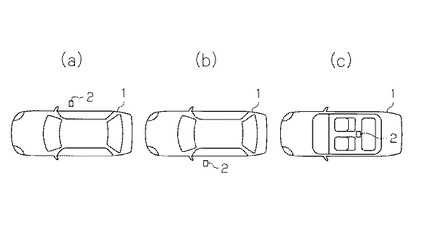
ところで、図3(a)に示すように、電子キー2が運転席側車外に位置したり、或いは図3(b)に示すように、電子キー2が助手席側車外に位置したりする場合、電子キー2は、運転席アンテナ11及び助手席アンテナ13のうち、一方側に極端に近づく。このため、結果として、運転席側磁界強度Hd及び助手席側磁界強度Hpは、一方が他方に対して高い値をとるので、運転席側磁界強度Hdと助手席側磁界強度Hpとの磁界強度差は、高い値をとるはずである。よって、基本的には、2つの磁界強度Hd,Hpの大小を比較すれば、電子キー2の車外位置判定は可能である。
【0032】
一方、図3(c)に示すように、電子キー2が車内に位置する場合、電子キー2は、運転席アンテナ11と助手席アンテナ13とに対して、ほぼ均等に近づく。このため、電子キー2は、結果として運転席アンテナ11及び助手席アンテナ13の両方からリクエスト信号Srqを受信でき、これらアンテナ11,13の両方でスマート通信が実行可能である。よって、運転席アンテナ11及び助手席アンテナ13の両方でスマート通信が実行可となれば、それを以て車内判定を成立とし、電子キー2が車内にあると判定する。
【0033】
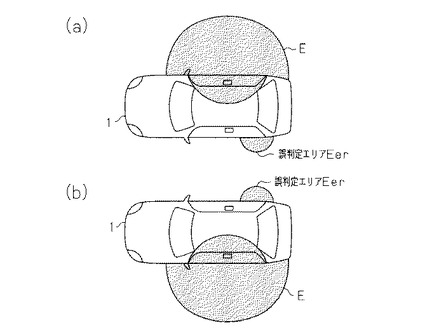
ここで、例えば助手席側磁界強度Hpよりも運転席側磁界強度Hdの方が高くなる点を図上にプロットしていくと、このプロット点の集まりは、図4(a)に示すように、電子キー2が運転席側車外に位置すると割り出すことが可能な見かけ上の判定エリアEとして表すことができる。しかし、運転席アンテナ11の通信エリアは、必ずしも正確には形成できるものではないため、場合によっては、同図に示すように、助手席側に判定エリア(誤判定エリアEer)が形成されてしまう可能性も否定できない。この場合、もし仮に電子キー2が誤判定エリアEerに位置してしまうと、電子キー2が運転席側車外に無いにも拘らず、運転席側車外に位置すると誤判定される問題に繋がる。なお、助手席アンテナ13が電波送信した際には、図4(b)に示すような誤判定エリアEerが車両1に形成される。
【0034】
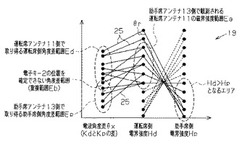
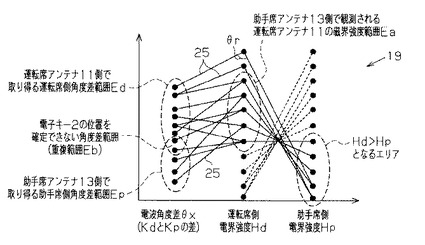
そこで、本例の場合、電子キー2が誤判定エリアEerに位置する際、これを通信成立からキャンセルしてキー位置を判定可能とするために、図5及び図6に示すような正規化グラフ19を利用してキー位置を判定する。図5の正規化グラフ19は、電波角度差θxと運転席側磁界強度Hdと助手席側磁界強度Hpとを横軸にとり、これらパラメータを同一グラフ上で比較可能となるように正規化した数量を縦軸としたグラフである。なお、図5の説明書きは、運転席側車外に位置した電子キー2を位置判定したときの動作流れを示したものである。
【0035】
ところで、助手席側磁界強度Hpよりも運転席側磁界強度Hdの方が高い値をとる場合、図5を見ても分かる通り、電子キー2が運転席側車外に位置するときのみ、この判定結果が得られる訳ではなく、電子キー2が助手席側車外に位置するときも、この判定結果が得られてしまうことが分かる。しかし、運転席側磁界強度Hdが助手席側磁界強度Hpよりも極端に高い値をとる場合は、電子キー2が運転席ドア10に近接していると見なせるので、結果として電子キー2が運転席側車外に位置していると処理しても何ら問題はない。
【0036】
一方、運転席側磁界強度Hdと助手席側磁界強度Hpとの差に極端な磁界強度差が無い場合、つまり運転席側磁界強度Hdが図5の正規化グラフ19で示す磁界強度範囲Eaに位置する場合、電子キー2が正しく運転席側車外に位置しているものもあるが、実際のところは、助手席側車外に位置する電子キー2、つまり電子キー2が誤判定エリアEerに位置するものも結果として含んでしまっている。よって、正確なキー位置判定のためには、電子キー2が誤判定エリアEerに位置するもの判定結果から切り分ける必要がある。なお、磁界強度範囲Eaが設定強度範囲に相当する。
【0037】
ここで、電子キー2が運転席側車外に位置する場合と、電子キー2が助手席側車外に位置する場合とでは、車両1に対するキー位置の違い(車体右側と車体左側)から、電波角度差θxが異なる値をとることが分かる。即ち、電波角度差θxは、図5の正規化グラフ19において、電子キー2が運転席側に位置していれば高い値で表され、電子キー2が助手席側に位置していれば低い値で表される特性がある。よって、電波角度差θxが図5に示す運転席側角度差範囲Edに位置していれば、電子キー2が運転席側車外に位置することが分かり、図5に示す助手席側角度差範囲Epに位置していれば、電子キー2が助手席側車外に位置することが分かる。
【0038】
しかし、運転席側角度差範囲Edと助手席側角度差範囲Epとには、電子キー2が運転席及び助手席のどちらにいても取り得る重複範囲Ebが存在する。よって、電波角度差θxがこの重複範囲Ebに位置すると、電子キー2の位置を正確に判定できないことになるので、単に電波角度差θxの大小を見ただけでの位置判定では問題がある。
【0039】
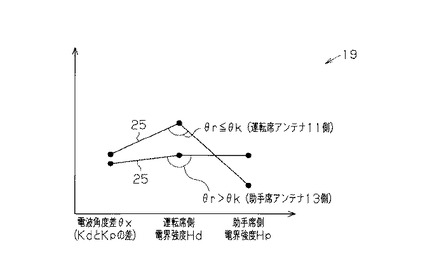
しかし、図6に示すように、正規化グラフ19において電波角度差θxと運転席側磁界強度Hdと助手席側磁界強度Hpとを繋げて三角線25を形取ると、この三角線25が成す角度θrは、電子キー2が運転席側に位置する場合、閾値角θk以下の値をとり、電子キー2が助手席側に位置する場合、閾値角θkよりも大きな値をとる特性がある。よって、電波角度差θxが重複範囲Ebに位置する際には、三角線25の角度θrと閾値角θkとを比較すれば、電子キー2が運転席側及び助手席側のどちらに位置するのかを判定できることが分かる。
【0040】
よって、図1に示すように、照合ECU9には、運転席側磁界強度Hdと助手席側磁界強度Hpと比較する磁界強度比較部26が設けられている。この磁界強度比較部26は、2つの磁界強度Hd,Hpの大小を比較するものであるので、運転席側磁界強度Hdと助手席側磁界強度Hpとの磁界強度差を算出するものであるとも言える。なお、磁界強度比較部26が第1判定手段を構成する。
【0041】
照合ECU9には、磁界強度比較部26による比較結果を基に、2つの磁界強度Hd,Hpのうち高い側が磁界強度範囲Ea内に位置しているか否かを見ることで車外のキー位置を判定する第1キー位置判定部27が設けられている。第1キー位置判定部27は、2つの磁界強度Hd,Hpの高い側が磁界強度範囲Eaにあれば、この段階ではキー位置を判定することができないと認識する。一方、第1キー位置判定部27は、2つの磁界強度Hd,Hpのうち高い側が磁界強度範囲Eaに無い場合、即ち高い側が磁界強度範囲Eaを超える磁界強度を有している場合、その電波送信側の車外に電子キー2が位置していると判定する。例えば、図5に示すように、運転席側磁界強度Hdが磁界強度範囲Eaよりも高い値をとっていれば、電子キー2が運転席側車外に位置すると判定する。なお、第1キー位置判定部27が第1判定手段を構成する。
【0042】
照合ECU9には、第1キー位置判定部27で位置を判定できない場合に、電波到来方向Kd,Kpの電波角度差θxによりキー位置を判定する第2キー位置判定部28が設けられている。第2キー位置判定部28は、電波パラメータ取得部24から2つの電波到来方向Kd,Kpを取得し、これら電波到来方向Kd,Kpの差をとって電波角度差θxを算出する。第2キー位置判定部28は、電波角度差θxが図5に示す運転席側角度差範囲Edに電波角度差θxが位置していれば、電子キー2が運転席側車外に位置すると判定し、電波角度差θxが助手席側角度差範囲Epに位置していれば、電子キー2が助手席側車外に位置すると判定する。一方、第2キー位置判定部28は、電波角度差θxが重複範囲Ebに位置していれば、この段階ではキー位置を判定することができないと認識する。なお、第2キー位置判定部28が第2キー位置判定手段に相当する。
【0043】
また、照合ECU9には、第2キー位置判定部28でキー位置を確定できなかった場合に、正規化グラフ19の三角線25の角度θrを使用してキー位置を判定する第3キー位置判定部29が設けられている。第3キー位置判定部29は、第2キー位置判定部28でキー位置を判定できない際、正規化グラフ19上で3点を結んで三角線25を算出し、この三角線25の角度θrを算出する。そして、第3キー位置判定部29は、角度θrと閾値角θkとを比較し、この比較結果を基に電子キー2が運転席側車外及び助手席側車外のどちらに位置しているのかを判定する。なお、第3キー位置判定部29が第3判定手段に相当する。
【0044】
照合ECU9には、電子キー2が車内に位置しているか否かを判定する車内判定部30が設けられている。車内判定部30は、例えばカーテシスイッチ等で運転者の乗車を検出すると、車内照合成立有無を確認すべく動作を開始する。そして、車内判定部30は、この車内照合の際、運転席アンテナ11及び助手席アンテナ13からの両方にリクエスト信号Srq対して電子キー2が応答を返信してきたことを確認すると、電子キー2が車内に位置すると判定する。
【0045】
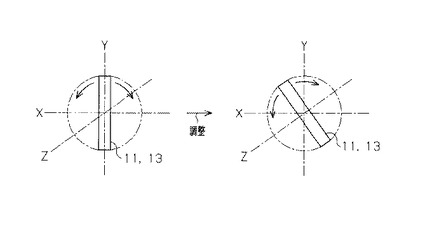
図7に示すように、運転席アンテナ11や助手席アンテナ13は、車体に対して搭載位置や搭載向きが調整されている。これは、車体形状やアンテナ搭載位置により、電子キー2が検出する磁界強度Hxや電波角度差θxが異なるためである。本例の場合、例えば地面に対して直交する垂直方向(同図のY方向)に対して、略30度の角度を付けて運転席アンテナ11や助手席アンテナ13が車体に取り付けられている。
【0046】
次に、本例のキー位置判定装置18の動作を図8に従って説明する。
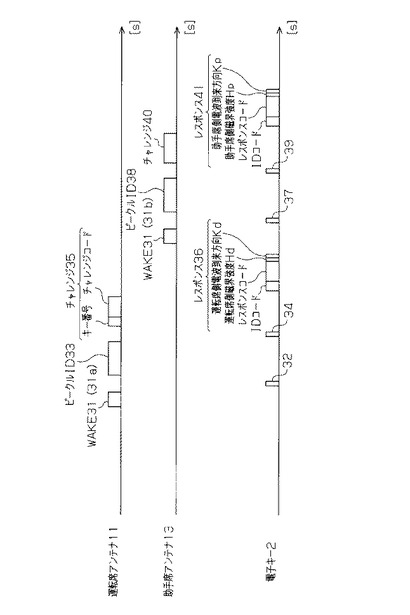
ここで、最初に、車両1が駐車状態(ドアロック施錠、エンジン停止)の際、運転者が運転席ドア10から乗車する場合を想定する。このとき、交互送信動作部20は、運転席ドアの車外ドアハンドルノブが運転者によってタッチ操作されたことを確認すると、待機状態をとる電子キー2を起動状態に切り換えるために、運転席アンテナ11及び助手席アンテナ13からウェイク信号31を交互送信する。このとき、交互送信動作部20は、まずは最初に運転席アンテナ11から第1ウェイク信号31aを送信する。
【0047】
電子キー2は、運転席アンテナエリアSd内に入っているので、第1ウェイク信号31aを受信可能である。電子キー2は、第1ウェイク信号31aを受信すると、この第1ウェイク信号31aによって起動状態に切り換わる。このとき、磁界強度算出部21は、第1ウェイク信号31aの受信強度、即ち運転席側磁界強度Hdを算出する。また、電波到来方向算出部22は、第1ウェイク信号31aの到来方向、即ち運転席側電波到来方向Kdを算出する。電子キー2は、起動状態に切り換わると、第1アック信号32を車両1に送信する。
【0048】
照合ECU9は、第1ウェイク信号31aを送信した際、制限時間内にアック応答を受信すると、車両周囲に電子キー2が存在すると認識し、運転席アンテナ11を送信アンテナとする動作を継続する。照合ECU9は、車両周囲に電子キー2が存在することを確認すると、運転席アンテナ11からビークルID33を送信する。ビークルID33は、車両1の固有IDである。電子キー2は、ビークルID33を受信すると、ビークルID照合を実行し、このときの通信相手の車両1が正規通信相手か否かを確認する。電子キー2は、ビークルID照合が成立することを確認すると、第2アック信号34を車両1に送信する。
【0049】
照合ECU9は、ビークルID38の送信後の制限時間内に第2アック信号34を受信すると、続いてチャレンジ35を運転席アンテナ11から送信する。チャレンジ35には、電子キー2が何番目の登録キーかを問い合せるためのキー番号と、チャレンジレスポンス認証用のチャレンジコードとが含まれている。電子キー2は、チャレンジ35を受信すると、チャレンジ35内のキー番号で番号照合を実行し、番号照合が成立することを確認すると、チャレンジコードを自身の暗号鍵に通してレスポンスコードを演算する。電子キー2は、レスポンスコードの演算が完了すると、レスポンス36を車両1に送信する。レスポンス36には、電子キー2のIDコードと、演算したレスポンスコードとが含まれている。電子キー2は、レスポンス36の送信が完了すると、元の待機状態に戻る。
【0050】
また、電子キー2がレスポンス36を車両1に送信する際、電波パラメータ通知部23は、レスポンス36にIDコード及びレスポンスコードとともに、運転席側磁界強度Hdのデータと運転席側電波到来方向Kdのデータとを含ませて送信させる。即ち、レスポンス36として、IDコードとレスポンスコードと運転席側磁界強度Hdと運転席側電波到来方向Kdとが電子キー2から車両1に送信される。
【0051】
照合ECU9は、チャレンジ35の送信の際、自身もチャレンジコードを自らの暗号鍵に通してレスポンスコードを演算する。そして、照合ECU9は、電子キー2からレスポンス36を受信すると、レスポンス36に含まれるレスポンスコードでレスポンス照合を行い、この照合が成立することを確認すると、レスポンス36に含まれるIDコードでIDコード照合を実行する。照合ECU9は、両照合がともに成立することを確認すると、スマート照合を成立として処理する。
【0052】
さらに、電波パラメータ取得部24は、スマート照合が成立することを確認すると、レスポンス36に含まれる運転席側磁界強度Hd及び運転席側電波到来方向Kdを取得する。即ち、電波パラメータ取得部24は、このときに受信したレスポンス36が、運転席アンテナ11からの問い合せに対する電子キー2の応答であると把握しているので、このレスポンス36に含まれる磁界強度データを運転席側磁界強度Hdとして取り込み、電波到来方向データを運転席側電波到来方向Kdとして取り込む。
【0053】
交互送信動作部20は、運転席アンテナ11によるスマート照合が完了することを確認すると、今度は助手席アンテナ13から第2ウェイク信号31bの送信を開始して、助手席アンテナ13を車両送信アンテナとして電子キー2とスマート通信する。電子キー2は、第2ウェイク信号31bを受信すると、この第2ウェイク信号31bによって再度起動状態に入る。このとき、磁界強度算出部21は、第2ウェイク信号31bの受信強度、即ち助手席側磁界強度Hpを算出する。また、電波到来方向算出部22は、第2ウェイク信号31bの電波到来方向、即ち助手席側電波到来方向Kpを算出する。
【0054】
また、電子キー2は、第2ウェイク信号31bにより起動状態に切り換わると、第3アック信号37を車両1に送信する。照合ECU9は、第2ウェイク信号31bを送信した際、制限時間内にアック応答を受信すると、助手席アンテナ13を車両送信アンテナとしたスマート通信を継続する。
【0055】
以降のスマート通信は、運転席アンテナ11を車両送信アンテナとしたときと同様の通信シーケンスにより実行される。即ち、第3アック信号37が車両1に届くと、助手席アンテナ13からビークルID38が送信され、ビークルID照合が実行される。そして、ビークルID照合成立通知として第4アック信号39が電子キー2から車両1に届くと、助手席アンテナ13からチャレンジ40が送信される。
【0056】
電子キー2は、チャレンジ40を受信すると、同チャレンジ40でキー番号照合と、レスポンスコード演算とを実行する。電子キー2は、レスポンスコード演算が完了すると、レスポンス41を車両1に送信する。このレスポンス41には、電子キー2のIDコードと、演算したレスポンスコードと、助手席側磁界強度Hpのデータと、助手席側電波到来方向Kpのデータとが含まれている。
【0057】
照合ECU9は、レスポンス41を受信すると、レスポンス認証とIDコード照合とを行い、これら両照合が成立することを確認すると、スマート照合を成立として処理する。また、電波パラメータ取得部24は、スマート照合が成立することを確認すると、このレスポンス41から助手席側磁界強度Hp及び助手席側電波到来方向Kpを取得する。即ち、電波パラメータ取得部24は、このときに受信したレスポンス41が、助手席アンテナ13からの問い合せに対する電子キー2の応答であると把握しているので、このレスポンス41に含まれる磁界強度データを助手席側磁界強度Hpとして取り込み、電波到来方向データを助手席側電波到来方向Kpとして取り込む。
【0058】
磁界強度比較部26は、2つの磁界強度Hd,Hpを取得すると、これら磁界強度Hd,Hpの大小を比較し、その比較結果を基に、電子キー2が運転席側車外及び助手席側車外のどちらに位置する可能性が高いのかを第1キー位置判定部27に通知する。例えば、運転席側磁界強度Hdの方が高いと、電子キー2が運転席側車外に位置する可能性が高いと通知され、助手席側磁界強度Hpの方が高いと、電子キー2が助手席側車外に位置する可能性が高いと通知される。
【0059】
第1キー位置判定部27は、電子キー2が運転席側車外に位置する可能性が高い通知を受けると、運転席側磁界強度Hdが磁界強度範囲Eaに位置するか否かを確認する。このとき、第1キー位置判定部27は、図5に示すように、運転席側磁界強度Hdが磁界強度範囲Ea内にあることを確認すると、この段階ではまだキー位置を正確に判定できないとして、キー位置判定を第2キー位置判定部28に委ねる。一方、第1キー位置判定部27は、運転席側磁界強度Hdが磁界強度範囲Ea外にあることを確認すると、電子キー2が運転席側車外に存在すると判定する。
【0060】
第2キー位置判定部28は、第1キー位置判定部27でキー位置が判定できない場合、運転席側電波到来方向Kdと助手席側電波到来方向Kpとの電波角度差θxを算出し、図5に示すように、電波角度差θxが運転席側角度差範囲Ed及び助手席側角度差範囲Epのどちらにあるのかを確認することにより、キー位置を判定する。このとき、第2キー位置判定部28は、電波角度差θxが運転席側角度差範囲Edにあることを確認すると、電子キー2が運転席側車外に位置すると判定し、電波角度差θxが助手席側角度差範囲Epにあることを確認すると、電子キー2が助手席側車外に位置すると判定する。また、電波角度差θxが重複範囲Ebにあることを確認すると、この段階ではまだキー位置を正確に判定できないとして、キー位置判定を第3キー位置判定部29に委ねる。
【0061】
第3キー位置判定部29は、第2キー位置判定部28でキー位置が判定できない場合、正規化グラフ19において、このときの電波角度差θxと運転席側磁界強度Hdと助手席側磁界強度Hpとの3点を繋いで三角線25を算出し、この三角線25の頂点の成す角度θrを算出する。そして、第3キー位置判定部29は、算出した角度θrと閾値角θkとの大小を比較して、電子キー2の位置を最終判断する。このとき、第3キー位置判定部29は、角度θrが閾値角θk以下であれば、電子キー2が運転席側車外に位置すると判定し、角度θrが閾値角よりも大きければ、電子キー2が助手席側車外に位置すると判定する。
【0062】
ここで、第3キー位置判定部29は、車外ドアハンドルノブのタッチ操作をトリガとして開始されたスマート通信であることを以て、このときのスマート通信が車外通信であることを認識している。また、第3キー位置判定部29は、タッチ操作された車外ドアハンドルが、運転席側であることを把握しているので、運転席側に電子キー2が位置すべきであることも認識している。よって、第3キー位置判定部29は、キー位置判定により電子キー2が運転席側車外に位置することを確認すると、車外位置判定を成立として処理する。照合ECU9は、電子キー2との間のスマート照合が成立し、かつ車外位置判定も正しいということを確認すると、車外照合を成立として処理し、ドアロック装置6にドアロック解錠を実行させる。
【0063】
続いて、ドアロックの解錠後、運転者が車内に乗車した場合を想定する。照合ECU9は、運転者が車内に乗車したことを例えばカーテシスイッチ等により確認すると、ドアロックを解錠したときと同じ通信シーケンスで、同様のスマート通信を実行する。よって、この場合、車内判定部30は、運転席アンテナ11からのリクエスト信号Srqの応答としてID信号Sidを受信し、助手席アンテナ13からのリクエスト信号Srqの応答としてID信号Sidを受信し、これら両方のID信号SidでID照合が成立することを確認すると、電子キー2が車内に位置すると判定する。そして、車内判定部30は、車内に位置する電子キー2とのID照合、即ち車内照合が成立することを確認すると、エンジン始動装置7による電源遷移操作及びエンジン始動操作を許可する。
【0064】
今度は、降車した運転者がドアロックを施錠する場合を想定する。照合ECU9は、車両1が停車状態(ドアロック解錠、エンジン停止)の際、運転席ドア10の車外ドアハンドルノブのロックボタン(図示略)が押し操作されたことを検出すると、前述した通信シーケンスと同様のスマート照合を実行する。このときも、運転席アンテナ11及び助手席アンテナ13を交互に車両送信アンテナとしてスマート通信を実行し、運転席側磁界強度Hd及び運転席側電波到来方向Kdと、助手席側磁界強度Hp及び助手席側電波到来方向Kpとを取得する。
【0065】
そして、磁界強度比較部26及びキー位置判定部27〜29は、運転者が運転席ドア10から乗車したときと同様に、正規化グラフ19を使用して電子キー2の位置を判定する。このとき、これらキー位置判定部27〜29が、電子キー2が運転席側車外に位置すると判定すると、車外位置判定が成立として処理される。照合ECU9は、電子キー2との間のスマート照合が成立し、かつ車外位置判定も正しいということを確認すると、車外照合を成立として処理、ドアロック装置6にドアロックの施錠を実行させる。
【0066】
なお、以上は、運転席ドア10から車両1に乗車する例を説明したが、助手席ドア12や後部右側ドアや左側ドアから乗降車する場合の動作も、基本的な動作は運転席ドア10から乗降車する場合と同様であるので、これらの具体例については詳細を省略する。
【0067】
以上により、本例においては、図5や図6に示すような正規化グラフ19を使用して、電子キー2の車外位置判定を実行する。このため、もし仮にアンテナ搭載側と反対側に通信エリアが漏れても、この漏れエリアを通信成立エリアからキャンセルすることが可能となる。よって、アンテナ搭載側の反対側に電子キー2が位置する際に、この電子キー2とスマート照合が成立する状況が生じ難くなるので、より正確に電子キー2の位置を判定することが可能となる。
【0068】
本実施形態の構成によれば、以下に記載の効果を得ることができる。
(1)まずは最初、運転席側磁界強度Hd及び助手席側磁界強度Hpの大小比較によりキー位置を判定し、この強度大小判定でキー位置を判定できない場合、運転席側電波到来方向Kdと助手席側電波到来方向Kpの電波角度差θxによりキー位置を判定し、この角度差判定でキー位置を判定できない場合、正規化グラフ19上でプロットした3点の三角線25が成す角度θrによりキー位置を最終判断する。このように、本例の場合は、複数の判定方式を組み合わせて、電子キー2の車外位置を判定する。よって、電子キー2の判定位置を、より正確に切り分けることが可能となるので、電子キー2が運転席側車外及び助手席車外のどちらに位置するのかを、より精度よく判定することができる。
【0069】
(2)車体運転席側に運転席アンテナ11を配置し、車体助手席側に助手席アンテナ13を配置して、電子キー2が車外及び車内のどちらに位置するのかを判定する。よって、本例の場合は、キー位置判定を車内外判定も可としたので、電子キー2が車外及び車内のどちらに位置するのかも確認することができる。
【0070】
(3)スマート照合の過程でキー位置判定も実行するので、スマート照合の一連の過程で、照合と同時に位置判定も実行することができる。
(4)電子キー2の受信アンテナとして3軸受信アンテナを使用したので、電子キー2の磁界強度Hxや電波到来方向Kxを、より正確に算出することができる。
【0071】
(5)運転席アンテナ11や助手席アンテナ13を車体に取り付ける際、その搭載位置や取り付け角度を調整するので、より好適な通信エリアを車体周囲に形成することができ、ひいてはこれがキー位置の判定精度向上に寄与する。
【0072】
(6)キー操作フリーシステム3は電子キー2からの応答の論理判定によりキー位置を見る方式であるので、車両1に搭載する送信アンテナは運転席アンテナ11と助手席アンテナ13との2つで済む。よって、車両1の搭載アンテナ数を少なく抑えることができ、アンテナに要するコストを削減することができる。従って、本例は、車両1の送信アンテナを少なく抑えつつも、電子キー2の位置判定精度を確保するという極めて優れた効果を得ることができる。
【0073】
なお、実施形態はこれまでに述べた構成に限らず、以下の態様に変更してもよい。
・キー位置判定装置18は、電子キー2の車外位置判定及び車内外判定の両方を実行することに限らず、例えば車外位置判定のみを行うものでもよい。
【0074】
・キー位置判定は、車外位置判定や車内外位置判定に限らず、例えば車内のどの位置にあるのか、又はラッゲージ内に位置しているのかなど、判定内容を適宜変更することが可能である。
【0075】
・車両1の送信アンテナは、運転席アンテナ11や助手席アンテナ13に限らず、例えばラッゲージドアアンテナを含んでもよい。
・車両1の送信アンテナは、2本に限らず、3本としてもよい。
【0076】
・ウェイク信号31は、運転者の所定操作をトリガとして送信が開始されることに限定されない。例えば、車両1が駐車状態の際、車両1に近づく電子キー2を常に監視するために、常時送信としてもよい。
【0077】
・磁界強度Hd,Hpや電波到来方向Kd,Kpは、3軸のベクトル合成値を使用して算出されることに限らず、例えば3軸の中の最大値を使用してもよい。
・電子キー2の受信アンテナは、3軸アンテナに限定されず、例えば1軸アンテナでもよい。
【0078】
・磁界強度Hxや電波到来方向Kxの算出は、ウェイク信号31a,31bで行うことに限らず、例えばビークルID33,38やチャレンジ35,40により算出してもよい。
【0079】
・キー位置判定は、電子キー2から磁界強度データや電波到来方向データを車両1が受け付けて、車両1側で行う形式に限定されない。例えば、キー位置判定までを全て電子キー2側で行い、その判定結果を車両1に通知する形式でもよい。
【0080】
・受信強度は、受信電波の磁界強度Hxに限定されず、電界強度としてもよい。
・電波到来方向Kxの算出は、アダプティブアレーアンテナを使用した方式に限定されず、他の形式を採用してもよい。
【0081】
・キー位置判定は、スマート照合の過程で実行されることに限定されない。即ち、スマート照合とは別の期間に、キー位置判定だけを別に実行してもよい。
・スマート照合は、運転席アンテナ11及び助手席アンテナ13の両方で成立を条件とすることに限らず、どちらか一方のみとしてもよい。
【0082】
・リクエスト信号Srqは、ID返信要求に限らず、電子キー2に応答を求める信号であればよい。
・電子キー2は、車両キーに限定されず、種々の端末(携帯電話、ICカード等)が使用可能である。また、電子キー2は、必ずしもキー機能を持つものに限らず、広義として認証行為が必要な通信端末(認証端末)を広く含むものとする。
【0083】
・キー操作フリーシステム3は、相互通信の往路と復路とで周波数が異なることに限定されず、同じ周波数としてもよい。また、キー操作フリーシステム3の通信周波数は、LFやUHFに限らず、例えばHF(High Frequency)等の他の周波数を使用してもよい。
【0084】
・スマート通信の過程で車両1から電子キー2の電力電波を送信し、この電力電波により電子キー2を駆動させることで、電子キー2を電池レスとしてもよい。
・電子キーシステムは、キー操作フリーシステム3に限定されず、車両1と電子キー2とが相互無線通信によりID照合を行うものであればよい。
【0085】
・キー操作フリーシステム3は、車両1に搭載されることに限らず、他の機器や装置に採用可能である。
次に、上記実施形態及び別例から把握できる技術的思想について、それらの効果とともに以下に追記する。
【0086】
(イ)請求項1〜3のいずれかにおいて、前記電子キーの受信アンテナは、複数軸アンテナにより形成され、前記受信強度算出手段は、前記複数軸アンテナのベクトル合成値を使用して前記受信強度を算出する。この構成によれば、より精度よく受信強度を算出することが可能となる。
【0087】
(ロ)請求項1〜3、前記技術的思想(イ)のいずれかにおいて、前記一アンテナ及び前記他アンテナは、水平面に対する直交方向を基準として角度を持つ向きで取り付けられることにより、取付位置が調整されている。この構成によれば、これらアンテナから好適な通信エリアを形成することが可能となり、ひいては受信強度や電波到来方向を、精度よく算出することが可能となる。
【符号の説明】
【0088】
1…通信マスタとしての車両、2…電子キー、3…電子キーシステムとしてのキー操作フリーシステム、11…一アンテナ及び他アンテナを構成する運転席アンテナ、13…一アンテナ及び他アンテナを構成する助手席アンテナ、18…キー位置判定装置、19…正規化グラフ、21…受信強度算出手段を構成する磁界強度算出部、22…電波方向算出手段を構成する電波到来方向算出部、23…受信強度算出手段及び電波方向算出手段を構成する電波パラメータ通知部、24…受信強度算出手段及び電波方向算出手段を構成する電波パラメータ取得部、25…三角線、26…第1判定手段を構成する磁界強度比較部、27…第1判定手段を構成する第1キー位置判定部、28…第2判定手段を構成する第2キー位置判定部、29…第3判定手段を構成する第3キー位置判定部、Hx(Hd,Hp)…受信強度としての磁界強度、Kx(Kd,Kp)…電波到来方向、Ea…設定強度範囲としての磁界強度範囲、θx…電波角度差、θr…角度。
【技術分野】
【0001】
本発明は、電子キーの位置を判定する電子キーシステムのキー位置判定装置に関する。
【背景技術】
【0002】
従来、車両キーとしての電子キーから無線によりIDコードを車両に送信してID照合を実行する電子キーシステムが広く使用されている。この電子キーシステムには、車両からIDコード返信要求としてリクエストを送信し、このリクエストに応答して電子キーが返信してきたIDコードによりID照合を行うキー操作スマートシステムがある。キー操作フリーシステムには、車外でID照合が成立すると、ドアロック施解錠が許可又は実行されるスマートエントリーシステムと、車内でID照合が成立すると、車内のエンジンスイッチの単なる押し操作のみでエンジン始動が可能となるワンプッシュエンジンスタートシステムとがある。
【0003】
この電子キーシステムの一種には、図9に示すように、車両80の運転席ドア81側(車体右側)にアンテナ83を配置し、助手席ドア82側(車体左側)にアンテナ84を設置し、これらアンテナ83,84からの送信電波に対して電子キー85が返してきた応答の論理判定によってキー位置を判定する技術(特許文献1,2等)が考案されている。この論理判定キー位置検出方式は、車体右側に設置された運転席アンテナ83と、車体左側に設置された助手席アンテナ84とから順にリクエストを送信して、運転席アンテナエリア86と助手席アンテナエリア87とを順に形成し、これらリクエストに対して電子キー85が返信するIDコード、即ち応答の論理判定によってキー位置を判定する。
【0004】
例えば、運転席アンテナ83のリクエストに対して電子キー85からの応答があり、助手席アンテナ84のリクエストに対して電子キー85から応答がないと、電子キー85が車外に位置すると判定する。また、運転席アンテナ83のリクエストに対して電子キー85からの応答がなく、助手席アンテナ84からのリクエストに対して電子キー85の応答があれば、電子キー85が車外に位置すると判定する。さらに、運転席アンテナ83のリクエストと助手席アンテナ84のリクエストとに対して両方とも応答があれば、電子キー85が車内に位置していると判定する。
【0005】
図9に示す論理判定キー位置検出方式は、車体右側と車体左側とに設けた一対のアンテナで車外と車内との両方の位置を見ることができる。よって、論理判定キー位置検出方式は、例えば車外アンテナとして各ドアにアンテナを設置しつつ、更に車内アンテナとして車内に複数のアンテナを設置して電子キーの位置を検出する場合に比べて、アンテナを車体の左右にのみ設置すればよい分だけ、アンテナ本数を少なく抑えることができる利点がある。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2004−84406号公報
【特許文献2】特開2005−76329号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
ところで、論理判定キー位置検出方式は、少ないアンテナで車外又は車内を判定するため、アンテナエリア86,87を極力広くとらなければならない現状がある。しかし、アンテナエリア86,87を広くとると、図10に示すように、アンテナ搭載側に対して反対側に電波が漏れて、漏れ通信エリア88が形成されることがある。この場合、電子キー2が漏れ通信エリア88に位置すると、電子キー2がアンテナ反対側に位置するにも拘らず、通信が成立してしまうので、電子キー2の位置が誤検出される。よって、これがドアロック施解錠の誤動作に繋がっていた。
【0008】
本発明の目的は、電子キーの位置をより精度よく検出することができる電子キーシステムのキー位置判定装置を提供することにある。
【課題を解決するための手段】
【0009】
前記問題点を解決するために、本発明では、通信マスタからのID返信要求に応答して電子キーが返信してきたIDコードによりID照合を行う電子キーシステムのキー位置判定装置において、前記通信マスタの一アンテナ及び他アンテナから交互に電波が送信された際、各電波を前記電子キーが受信したときのそれぞれの受信強度を算出する受信強度算出手段と、前記した2電波を各々受信した際の電波到来方向を算出する電波方向算出手段と、前記2つ受信強度を比較し、該受信強度の高い側が設定強度範囲内に位置するか否かを確認することでキー位置を判定する第1判定手段と、前記第1判定手段でキー位置を判定できない場合、前記一アンテナからの電波到来方向と前記他アンテナからの電波到来方向との電波角度差を基に、キー位置を判定する第2判定手段と、前記第2判定手段でキー位置を判定できない場合、前記2つ受信強度及び前記電波角度の3点を同一グラフ上に並べた正規化グラフを使用し、当該3点を繋ぐことでできる三角線の頂点の成す角度を基にキー位置を判定する第3判定手段とを備えたことを要旨とする。
【0010】
この構成によれば、通信マスタの一アンテナ及び他アンテナから交互に電波を発信し、これら電波が電子キーに到達した際の各電波の受信強度と電波到来方向とを算出する。そして、まずは第1判定手段によって、単に一アンテナからの電波の受信強度と、他アンテナからの電波の受信強度とを比較してキー位置を判定する。ここで、一方が他方に対して極端に高い値をとれば、キー位置判定は可能であるが、例えば受信強度が設定強度範囲内にある場合には、キー位置を正確に判定できない。
【0011】
第1判定手段でキー位置を判定できない場合、続いては第2判定手段によって、一アンテナからの電波到来方向と、他アンテナからの電波到来方向との電波角度差を算出し、この電波角度差によりキー位置を判定する。このとき、電波角度差が所定範囲の値をとれば、問題なくキー位置を判定できるが、正確にキー位置を判定できない範囲をとった場合には、キー位置を正確に判定できない。
【0012】
第2判定手段でキー位置を判定できない場合、続いては第3判定手段によって、一アンテナからの電波の受信強度と、他アンテナからの電波の受信強度と、これらの電波角度差とを、同一グラフ上に並べた正規化グラフ上において、これら3点を繋げて三角線を算出し、この線によってできる角度からキー位置を判定する。このため、電波角度差でキー位置が判定できなくても、問題なくキー位置を最終判断することが可能となる。
【0013】
このように、本構成の場合、一アンテナからの電波と他アンテナからの電波の受信強度と電波到来方向を使用し、まずは最初に単に受信強度でキー位置を判定し、受信強度でキー位置を判定できない場合には電波角度差によりキー位置を判定し、電波角度差でキー位置を判定できない場合には、正規化グラフでとキー位置を判定するというように、複数の判定方式によりキー位置を判定する。よって、電子キーの判定位置を、より正確に切り分けることが可能となるので、より精度よく電子キーの位置を判定することが可能となる。
【0014】
本発明では、前記一アンテナ及び他アンテナの通信エリアは、前記通信マスタの室外及び室内の両方を補完する範囲で形成され、キー位置判定は、前記電子キーが前記通信マスタの室外及び室内のどちらに位置するのかを判定することを要旨とする。
【0015】
この構成によれば、キー位置判定を室内外判定に使用したので、電子キーが室外及び室内のどちらに位置するのかを、より正確に判定することが可能となる。
本発明では、前記アンテナから前記電子キーに送信される前記電波は、前記電子キーにIDコードの返信を求める前記ID返信要求の信号であって、キー位置判定は、前記通信マスタと前記電子キーとが前記ID照合する過程で実行されることを要旨とする。
【0016】
この構成によれば、ID照合の過程でキー位置判定も実行することとしたので、これら処理を一通信課程で同時に実行することが可能となる。
【発明の効果】
【0017】
本発明によれば、電子キーの位置をより精度よく検出することができる。
【図面の簡単な説明】
【0018】
【図1】一実施形態におけるキー位置判定装置の概略構成を示す構成図。
【図2】車両のアンテナエリアのイメージを示す概念図。
【図3】(a)は電子キーが運転席側車外に位置する状態を示す概念図、(b)は電子キーが助手席側車外に位置する状態を示す概念図、(c)は電子キーが車内に位置する状態を示す概念図。
【図4】(a)は助手席側に誤判定エリアが含まれた状態を示す磁界強度マップ図、(b)は運転席側に誤判定エリアが含まれた状態を示す磁界強度マップ図。
【図5】各点がプロットされた正規化グラフを示すグラフ図。
【図6】三角線により取り得る角度を示した正規化グラフのグラフ図。
【図7】運転席アンテナや助手席アンテナの取り付け角度の調整を示す模式図。
【図8】スマート通信の通信シーケンスを示すタイミングチャート。
【図9】従来における電子キーシステムの概略構成を示す模式図。
【図10】車両にアンテナの漏れエリアが形成された状態を示す模式図。
【発明を実施するための形態】
【0019】
以下、本発明を具体化した電子キーシステムのキー位置判定装置の一実施形態を図1〜図8に従って説明する。
図1及び図2に示すように、車両1には、無線によりキー照合を行う電子キーシステムの一種として、車両1からの問い合せに電子キー2が応答してID(Identification)照合を実行するキー操作フリーシステム3が設けられている。このキー操作フリーシステム3には、実際のキー操作を行うことなくドア開閉の一連の操作過程の中でドアロックの施解錠が実行されるスマートエントリーシステムと、車内(室内)に設置されたプッシュ式のエンジンスイッチ4を押し操作するのみでエンジンを始動することが可能なワンプッシュエンジンスタートシステムとがある。なお、車両1が通信マスタに相当し、キー操作フリーシステム3が電子キーシステムに相当する。
【0020】
この場合、車両1には、電子キー2との間でID照合を実行するキー照合装置5と、ドアロック動作を管理するドアロック装置6と、エンジンの動作を管理するエンジン始動装置7とが設けられ、これらが車内バス8によって接続されている。キー照合装置5には、同装置5のコントロールユニットとして照合ECU(Electronic Control Unit)9が設けられている。照合ECU9のメモリ(図示略)には、車両1と組みをなす電子キー2のIDコードが登録されている。
【0021】
照合ECU9には、運転席ドア10(図2参照)の周囲にLF(Low Frequency)帯の電波を発信する運転席側車外発信機(以降、運転席アンテナ11と記す)と、助手席ドア12(図2参照)の周囲にLF帯の電波を発信する助手席側車外発信機(以降、助手席アンテナ13と記す)と、UHF(Ultra High Frequency)帯の電波を受信する車両チューナ14とが接続されている。これらアンテナ11,13は、例えば車体左右のピラーにそれぞれ設けられ、電子キー2に対するID返信要求としてリクエスト信号Srqを送信可能となっている。なお、アンテナ11,13が一アンテナ及び他アンテナを構成する。
【0022】
図2に示すように、運転席アンテナ11は、運転席側車外及び車内に通信エリア(運転席アンテナエリアSd)を形成する送信強度で電波送信する。助手席アンテナ13は、助手席側車外及び車内に通信エリア(助手席アンテナエリアSp)を形成する送信強度で電波送信する。本例の場合、電子キー2の基本的な位置判定として、運転席アンテナ11からの電波を電子キー2が強く受信する際、電子キー2の位置が運転席側車外と判定され、助手席アンテナ13からの電波を電子キー2が強く受信する際、電子キー2の位置が運転席側車外と判定される。また、運転席アンテナ11からの電波と、助手席アンテナ13からの電波とを、ともに受信する際、電子キー2の位置が車内と判定される。
【0023】
図1に示すように、電子キー2には、電子キー2の動作を統括制御する通信制御部15が設けられている。通信制御部15のメモリ(図示略)には、キー固有のIDとしてIDコードが登録されている。通信制御部15には、LF帯の電波を受信可能なLF受信機16と、UHF帯の電波を送信可能なUHF送信機17とが接続されている。LF受信機16は、X軸アンテナとY軸アンテナとZ軸アンテナとを備えた3軸受信アンテナであって、各アンテナがコイルアンテナにより形成されている。電子キー2は、LF受信機16でリクエスト信号Srqを受信すると、IDコードを含むID信号SidをUHF送信機17によりUHF帯の電波で送信する。
【0024】
照合ECU9は、リクエスト信号Srqに対する応答として電子キー2からID信号Sidを受信すると、ID照合としてスマート照合を実行する。照合ECU9は、車外(室外)の電子キー2とスマート照合、即ち車外照合が成立することを確認すると、ドアロック装置6によるドアロック施解錠を実行又は許可する。また、照合ECU9は、車内の電子キー2とスマート照合、即ち車内照合が成立することを確認すると、エンジンスイッチ4のプッシュ操作によるエンジン始動及び電源遷移を許可する。
【0025】
図1に示すように、本例のキー操作フリーシステム3には、運転席アンテナ11及び助手席アンテナ13から電波(リクエスト信号Srq)が交互送信された際、各電波を電子キー2が受信したときのそれぞれの磁界強度Hxと、これら電波の電波角度差θxとを基にキー位置を判定するキー位置判定装置18が設けられている。本例のキー位置判定装置18は、運転席アンテナ11からの電波を電子キー2が受信した際の運転席側磁界強度Hdと、助手席アンテナ13からの電波を電子キー2が受信した際の助手席側磁界強度Hpとの大小関係からキー位置を判定し、この判定でキー位置を確定できない場合、電波角度差θxからキー位置を判定し、それでもキー位置を判定できない場合、図5や図6に示す正規化グラフ19を使用してキー位置を判定する。なお、磁界強度Hxが受信強度に相当する。
【0026】
この場合、照合ECU9には、一対の運転席アンテナ11及び助手席アンテナ13を交互に電波送信させる交互送信動作部20が設けられている。交互送信動作部20は、例えば車両1が駐車状態の際や、車外ドアハンドルノブのロックボタンが押されて施錠操作された際、これらアンテナ11,13からリクエスト信号Srqを交互送信して車外通信を開始する。また、交互送信動作部20は、例えばカーテシスイッチ等により運転者の乗車を確認すると、このときもアンテナ11,13からリクエスト信号Srqを交互送信して車内通信を開始する。
【0027】
通信制御部15には、電子キー2で受信した電波の受信強度(RSSI:Received Signal Strength Indicator)を、磁界強度Hxとして算出する磁界強度算出部21が設けられている。磁界強度算出部21は、運転席アンテナ11からのリクエスト信号Srqを電子キー2で受信した際、このときの磁界強度Hxを運転席側磁界強度Hdとして算出し、助手席アンテナ13からのリクエスト信号Srqを電子キー2で受信した際、このときの磁界強度Hxを助手席側磁界強度Hpとして算出する。また、磁界強度算出部21は、LF受信機16(3軸アンテナ)の3軸の受信強度のベクトル合成値を使用して、これら磁界強度Hd,Hpを算出する。なお、磁界強度算出部21が受信強度算出部を構成する。
【0028】
通信制御部15には、運転席アンテナ11及び助手席アンテナ13から受信した各電波の電波到来方向Kxを算出する電波到来方向算出部22が設けられている。LF受信機16がアダプティブアレーアンテナの場合、電波到来方向算出部22は、LF受信機16の各アンテナ素子をアダプティブ制御して電波到来方向Kxを算出する。電波到来方向算出部22は、運転席アンテナ11からのリクエスト信号Srqを電子キー2で受信した際、このときの電波到来方向Kxを運転席側電波到来方向Kdとして算出し、助手席アンテナ13からのリクエスト信号Srqを電子キー2で受信した際、このときの電波到来方向Kxを助手席側電波到来方向Kpとして算出する。なお、電波到来方向算出部22が電波方向算出手段を構成する。
【0029】
通信制御部15には、電子キー2で算出した磁界強度Hxや電波到来方向Kxをスマート通信の過程で車両1に通知する電波パラメータ通知部23が設けられている。電波パラメータ通知部23は、電子キー2がリクエスト信号Srqに応答してID信号Sidを車両1に送信する際、このID信号Sidに磁界強度Hx及び電波到来方向Kxのデータを含ませて送信する。即ち、ID信号Sidには、電子キー2のIDコードと、磁界強度データ及び電波到来方向データ(ともにデジタル値)とが含まれている。電波パラメータ通知部23は、運転席アンテナ11からのリクエスト信号Srqに応答してID信号Sidを返信する際、このID信号Sidに運転席側磁界強度Hd及び運転席側電波到来方向Kdを乗せて車両1に通知し、助手席アンテナ13からのリクエスト信号Srqに応答してID信号Sidを返信する際、このID信号Sidに助手席側磁界強度Hp及び助手席側電波到来方向Kpを乗せて車両1に通知する。なお、電波パラメータ通知部23が受信強度算出手段及び電波方向算出手段を構成する。
【0030】
照合ECU9には、スマート通信の際に電子キー2から磁界強度Hxを取得する電波パラメータ取得部24が設けられている。電波パラメータ取得部24は、スマート通信の際、ID信号Sidに含まれる磁界強度データ及び電波到来方向データを参照して、磁界強度Hx及び電波到来方向Kxを取得する。電波パラメータ取得部24は、運転席アンテナ11を車両送信アンテナとして使用したときの運転席側磁界強度Hd及び運転席側電波到来方向Kdと、助手席アンテナ13を車両送信アンテナとして使用したときの助手席側磁界強度Hp及び運転席側電波到来方向Kdとを取得する。なお、電波パラメータ取得部24が受信強度算出手段及び電波方向算出手段を構成する。
【0031】
ところで、図3(a)に示すように、電子キー2が運転席側車外に位置したり、或いは図3(b)に示すように、電子キー2が助手席側車外に位置したりする場合、電子キー2は、運転席アンテナ11及び助手席アンテナ13のうち、一方側に極端に近づく。このため、結果として、運転席側磁界強度Hd及び助手席側磁界強度Hpは、一方が他方に対して高い値をとるので、運転席側磁界強度Hdと助手席側磁界強度Hpとの磁界強度差は、高い値をとるはずである。よって、基本的には、2つの磁界強度Hd,Hpの大小を比較すれば、電子キー2の車外位置判定は可能である。
【0032】
一方、図3(c)に示すように、電子キー2が車内に位置する場合、電子キー2は、運転席アンテナ11と助手席アンテナ13とに対して、ほぼ均等に近づく。このため、電子キー2は、結果として運転席アンテナ11及び助手席アンテナ13の両方からリクエスト信号Srqを受信でき、これらアンテナ11,13の両方でスマート通信が実行可能である。よって、運転席アンテナ11及び助手席アンテナ13の両方でスマート通信が実行可となれば、それを以て車内判定を成立とし、電子キー2が車内にあると判定する。
【0033】
ここで、例えば助手席側磁界強度Hpよりも運転席側磁界強度Hdの方が高くなる点を図上にプロットしていくと、このプロット点の集まりは、図4(a)に示すように、電子キー2が運転席側車外に位置すると割り出すことが可能な見かけ上の判定エリアEとして表すことができる。しかし、運転席アンテナ11の通信エリアは、必ずしも正確には形成できるものではないため、場合によっては、同図に示すように、助手席側に判定エリア(誤判定エリアEer)が形成されてしまう可能性も否定できない。この場合、もし仮に電子キー2が誤判定エリアEerに位置してしまうと、電子キー2が運転席側車外に無いにも拘らず、運転席側車外に位置すると誤判定される問題に繋がる。なお、助手席アンテナ13が電波送信した際には、図4(b)に示すような誤判定エリアEerが車両1に形成される。
【0034】
そこで、本例の場合、電子キー2が誤判定エリアEerに位置する際、これを通信成立からキャンセルしてキー位置を判定可能とするために、図5及び図6に示すような正規化グラフ19を利用してキー位置を判定する。図5の正規化グラフ19は、電波角度差θxと運転席側磁界強度Hdと助手席側磁界強度Hpとを横軸にとり、これらパラメータを同一グラフ上で比較可能となるように正規化した数量を縦軸としたグラフである。なお、図5の説明書きは、運転席側車外に位置した電子キー2を位置判定したときの動作流れを示したものである。
【0035】
ところで、助手席側磁界強度Hpよりも運転席側磁界強度Hdの方が高い値をとる場合、図5を見ても分かる通り、電子キー2が運転席側車外に位置するときのみ、この判定結果が得られる訳ではなく、電子キー2が助手席側車外に位置するときも、この判定結果が得られてしまうことが分かる。しかし、運転席側磁界強度Hdが助手席側磁界強度Hpよりも極端に高い値をとる場合は、電子キー2が運転席ドア10に近接していると見なせるので、結果として電子キー2が運転席側車外に位置していると処理しても何ら問題はない。
【0036】
一方、運転席側磁界強度Hdと助手席側磁界強度Hpとの差に極端な磁界強度差が無い場合、つまり運転席側磁界強度Hdが図5の正規化グラフ19で示す磁界強度範囲Eaに位置する場合、電子キー2が正しく運転席側車外に位置しているものもあるが、実際のところは、助手席側車外に位置する電子キー2、つまり電子キー2が誤判定エリアEerに位置するものも結果として含んでしまっている。よって、正確なキー位置判定のためには、電子キー2が誤判定エリアEerに位置するもの判定結果から切り分ける必要がある。なお、磁界強度範囲Eaが設定強度範囲に相当する。
【0037】
ここで、電子キー2が運転席側車外に位置する場合と、電子キー2が助手席側車外に位置する場合とでは、車両1に対するキー位置の違い(車体右側と車体左側)から、電波角度差θxが異なる値をとることが分かる。即ち、電波角度差θxは、図5の正規化グラフ19において、電子キー2が運転席側に位置していれば高い値で表され、電子キー2が助手席側に位置していれば低い値で表される特性がある。よって、電波角度差θxが図5に示す運転席側角度差範囲Edに位置していれば、電子キー2が運転席側車外に位置することが分かり、図5に示す助手席側角度差範囲Epに位置していれば、電子キー2が助手席側車外に位置することが分かる。
【0038】
しかし、運転席側角度差範囲Edと助手席側角度差範囲Epとには、電子キー2が運転席及び助手席のどちらにいても取り得る重複範囲Ebが存在する。よって、電波角度差θxがこの重複範囲Ebに位置すると、電子キー2の位置を正確に判定できないことになるので、単に電波角度差θxの大小を見ただけでの位置判定では問題がある。
【0039】
しかし、図6に示すように、正規化グラフ19において電波角度差θxと運転席側磁界強度Hdと助手席側磁界強度Hpとを繋げて三角線25を形取ると、この三角線25が成す角度θrは、電子キー2が運転席側に位置する場合、閾値角θk以下の値をとり、電子キー2が助手席側に位置する場合、閾値角θkよりも大きな値をとる特性がある。よって、電波角度差θxが重複範囲Ebに位置する際には、三角線25の角度θrと閾値角θkとを比較すれば、電子キー2が運転席側及び助手席側のどちらに位置するのかを判定できることが分かる。
【0040】
よって、図1に示すように、照合ECU9には、運転席側磁界強度Hdと助手席側磁界強度Hpと比較する磁界強度比較部26が設けられている。この磁界強度比較部26は、2つの磁界強度Hd,Hpの大小を比較するものであるので、運転席側磁界強度Hdと助手席側磁界強度Hpとの磁界強度差を算出するものであるとも言える。なお、磁界強度比較部26が第1判定手段を構成する。
【0041】
照合ECU9には、磁界強度比較部26による比較結果を基に、2つの磁界強度Hd,Hpのうち高い側が磁界強度範囲Ea内に位置しているか否かを見ることで車外のキー位置を判定する第1キー位置判定部27が設けられている。第1キー位置判定部27は、2つの磁界強度Hd,Hpの高い側が磁界強度範囲Eaにあれば、この段階ではキー位置を判定することができないと認識する。一方、第1キー位置判定部27は、2つの磁界強度Hd,Hpのうち高い側が磁界強度範囲Eaに無い場合、即ち高い側が磁界強度範囲Eaを超える磁界強度を有している場合、その電波送信側の車外に電子キー2が位置していると判定する。例えば、図5に示すように、運転席側磁界強度Hdが磁界強度範囲Eaよりも高い値をとっていれば、電子キー2が運転席側車外に位置すると判定する。なお、第1キー位置判定部27が第1判定手段を構成する。
【0042】
照合ECU9には、第1キー位置判定部27で位置を判定できない場合に、電波到来方向Kd,Kpの電波角度差θxによりキー位置を判定する第2キー位置判定部28が設けられている。第2キー位置判定部28は、電波パラメータ取得部24から2つの電波到来方向Kd,Kpを取得し、これら電波到来方向Kd,Kpの差をとって電波角度差θxを算出する。第2キー位置判定部28は、電波角度差θxが図5に示す運転席側角度差範囲Edに電波角度差θxが位置していれば、電子キー2が運転席側車外に位置すると判定し、電波角度差θxが助手席側角度差範囲Epに位置していれば、電子キー2が助手席側車外に位置すると判定する。一方、第2キー位置判定部28は、電波角度差θxが重複範囲Ebに位置していれば、この段階ではキー位置を判定することができないと認識する。なお、第2キー位置判定部28が第2キー位置判定手段に相当する。
【0043】
また、照合ECU9には、第2キー位置判定部28でキー位置を確定できなかった場合に、正規化グラフ19の三角線25の角度θrを使用してキー位置を判定する第3キー位置判定部29が設けられている。第3キー位置判定部29は、第2キー位置判定部28でキー位置を判定できない際、正規化グラフ19上で3点を結んで三角線25を算出し、この三角線25の角度θrを算出する。そして、第3キー位置判定部29は、角度θrと閾値角θkとを比較し、この比較結果を基に電子キー2が運転席側車外及び助手席側車外のどちらに位置しているのかを判定する。なお、第3キー位置判定部29が第3判定手段に相当する。
【0044】
照合ECU9には、電子キー2が車内に位置しているか否かを判定する車内判定部30が設けられている。車内判定部30は、例えばカーテシスイッチ等で運転者の乗車を検出すると、車内照合成立有無を確認すべく動作を開始する。そして、車内判定部30は、この車内照合の際、運転席アンテナ11及び助手席アンテナ13からの両方にリクエスト信号Srq対して電子キー2が応答を返信してきたことを確認すると、電子キー2が車内に位置すると判定する。
【0045】
図7に示すように、運転席アンテナ11や助手席アンテナ13は、車体に対して搭載位置や搭載向きが調整されている。これは、車体形状やアンテナ搭載位置により、電子キー2が検出する磁界強度Hxや電波角度差θxが異なるためである。本例の場合、例えば地面に対して直交する垂直方向(同図のY方向)に対して、略30度の角度を付けて運転席アンテナ11や助手席アンテナ13が車体に取り付けられている。
【0046】
次に、本例のキー位置判定装置18の動作を図8に従って説明する。
ここで、最初に、車両1が駐車状態(ドアロック施錠、エンジン停止)の際、運転者が運転席ドア10から乗車する場合を想定する。このとき、交互送信動作部20は、運転席ドアの車外ドアハンドルノブが運転者によってタッチ操作されたことを確認すると、待機状態をとる電子キー2を起動状態に切り換えるために、運転席アンテナ11及び助手席アンテナ13からウェイク信号31を交互送信する。このとき、交互送信動作部20は、まずは最初に運転席アンテナ11から第1ウェイク信号31aを送信する。
【0047】
電子キー2は、運転席アンテナエリアSd内に入っているので、第1ウェイク信号31aを受信可能である。電子キー2は、第1ウェイク信号31aを受信すると、この第1ウェイク信号31aによって起動状態に切り換わる。このとき、磁界強度算出部21は、第1ウェイク信号31aの受信強度、即ち運転席側磁界強度Hdを算出する。また、電波到来方向算出部22は、第1ウェイク信号31aの到来方向、即ち運転席側電波到来方向Kdを算出する。電子キー2は、起動状態に切り換わると、第1アック信号32を車両1に送信する。
【0048】
照合ECU9は、第1ウェイク信号31aを送信した際、制限時間内にアック応答を受信すると、車両周囲に電子キー2が存在すると認識し、運転席アンテナ11を送信アンテナとする動作を継続する。照合ECU9は、車両周囲に電子キー2が存在することを確認すると、運転席アンテナ11からビークルID33を送信する。ビークルID33は、車両1の固有IDである。電子キー2は、ビークルID33を受信すると、ビークルID照合を実行し、このときの通信相手の車両1が正規通信相手か否かを確認する。電子キー2は、ビークルID照合が成立することを確認すると、第2アック信号34を車両1に送信する。
【0049】
照合ECU9は、ビークルID38の送信後の制限時間内に第2アック信号34を受信すると、続いてチャレンジ35を運転席アンテナ11から送信する。チャレンジ35には、電子キー2が何番目の登録キーかを問い合せるためのキー番号と、チャレンジレスポンス認証用のチャレンジコードとが含まれている。電子キー2は、チャレンジ35を受信すると、チャレンジ35内のキー番号で番号照合を実行し、番号照合が成立することを確認すると、チャレンジコードを自身の暗号鍵に通してレスポンスコードを演算する。電子キー2は、レスポンスコードの演算が完了すると、レスポンス36を車両1に送信する。レスポンス36には、電子キー2のIDコードと、演算したレスポンスコードとが含まれている。電子キー2は、レスポンス36の送信が完了すると、元の待機状態に戻る。
【0050】
また、電子キー2がレスポンス36を車両1に送信する際、電波パラメータ通知部23は、レスポンス36にIDコード及びレスポンスコードとともに、運転席側磁界強度Hdのデータと運転席側電波到来方向Kdのデータとを含ませて送信させる。即ち、レスポンス36として、IDコードとレスポンスコードと運転席側磁界強度Hdと運転席側電波到来方向Kdとが電子キー2から車両1に送信される。
【0051】
照合ECU9は、チャレンジ35の送信の際、自身もチャレンジコードを自らの暗号鍵に通してレスポンスコードを演算する。そして、照合ECU9は、電子キー2からレスポンス36を受信すると、レスポンス36に含まれるレスポンスコードでレスポンス照合を行い、この照合が成立することを確認すると、レスポンス36に含まれるIDコードでIDコード照合を実行する。照合ECU9は、両照合がともに成立することを確認すると、スマート照合を成立として処理する。
【0052】
さらに、電波パラメータ取得部24は、スマート照合が成立することを確認すると、レスポンス36に含まれる運転席側磁界強度Hd及び運転席側電波到来方向Kdを取得する。即ち、電波パラメータ取得部24は、このときに受信したレスポンス36が、運転席アンテナ11からの問い合せに対する電子キー2の応答であると把握しているので、このレスポンス36に含まれる磁界強度データを運転席側磁界強度Hdとして取り込み、電波到来方向データを運転席側電波到来方向Kdとして取り込む。
【0053】
交互送信動作部20は、運転席アンテナ11によるスマート照合が完了することを確認すると、今度は助手席アンテナ13から第2ウェイク信号31bの送信を開始して、助手席アンテナ13を車両送信アンテナとして電子キー2とスマート通信する。電子キー2は、第2ウェイク信号31bを受信すると、この第2ウェイク信号31bによって再度起動状態に入る。このとき、磁界強度算出部21は、第2ウェイク信号31bの受信強度、即ち助手席側磁界強度Hpを算出する。また、電波到来方向算出部22は、第2ウェイク信号31bの電波到来方向、即ち助手席側電波到来方向Kpを算出する。
【0054】
また、電子キー2は、第2ウェイク信号31bにより起動状態に切り換わると、第3アック信号37を車両1に送信する。照合ECU9は、第2ウェイク信号31bを送信した際、制限時間内にアック応答を受信すると、助手席アンテナ13を車両送信アンテナとしたスマート通信を継続する。
【0055】
以降のスマート通信は、運転席アンテナ11を車両送信アンテナとしたときと同様の通信シーケンスにより実行される。即ち、第3アック信号37が車両1に届くと、助手席アンテナ13からビークルID38が送信され、ビークルID照合が実行される。そして、ビークルID照合成立通知として第4アック信号39が電子キー2から車両1に届くと、助手席アンテナ13からチャレンジ40が送信される。
【0056】
電子キー2は、チャレンジ40を受信すると、同チャレンジ40でキー番号照合と、レスポンスコード演算とを実行する。電子キー2は、レスポンスコード演算が完了すると、レスポンス41を車両1に送信する。このレスポンス41には、電子キー2のIDコードと、演算したレスポンスコードと、助手席側磁界強度Hpのデータと、助手席側電波到来方向Kpのデータとが含まれている。
【0057】
照合ECU9は、レスポンス41を受信すると、レスポンス認証とIDコード照合とを行い、これら両照合が成立することを確認すると、スマート照合を成立として処理する。また、電波パラメータ取得部24は、スマート照合が成立することを確認すると、このレスポンス41から助手席側磁界強度Hp及び助手席側電波到来方向Kpを取得する。即ち、電波パラメータ取得部24は、このときに受信したレスポンス41が、助手席アンテナ13からの問い合せに対する電子キー2の応答であると把握しているので、このレスポンス41に含まれる磁界強度データを助手席側磁界強度Hpとして取り込み、電波到来方向データを助手席側電波到来方向Kpとして取り込む。
【0058】
磁界強度比較部26は、2つの磁界強度Hd,Hpを取得すると、これら磁界強度Hd,Hpの大小を比較し、その比較結果を基に、電子キー2が運転席側車外及び助手席側車外のどちらに位置する可能性が高いのかを第1キー位置判定部27に通知する。例えば、運転席側磁界強度Hdの方が高いと、電子キー2が運転席側車外に位置する可能性が高いと通知され、助手席側磁界強度Hpの方が高いと、電子キー2が助手席側車外に位置する可能性が高いと通知される。
【0059】
第1キー位置判定部27は、電子キー2が運転席側車外に位置する可能性が高い通知を受けると、運転席側磁界強度Hdが磁界強度範囲Eaに位置するか否かを確認する。このとき、第1キー位置判定部27は、図5に示すように、運転席側磁界強度Hdが磁界強度範囲Ea内にあることを確認すると、この段階ではまだキー位置を正確に判定できないとして、キー位置判定を第2キー位置判定部28に委ねる。一方、第1キー位置判定部27は、運転席側磁界強度Hdが磁界強度範囲Ea外にあることを確認すると、電子キー2が運転席側車外に存在すると判定する。
【0060】
第2キー位置判定部28は、第1キー位置判定部27でキー位置が判定できない場合、運転席側電波到来方向Kdと助手席側電波到来方向Kpとの電波角度差θxを算出し、図5に示すように、電波角度差θxが運転席側角度差範囲Ed及び助手席側角度差範囲Epのどちらにあるのかを確認することにより、キー位置を判定する。このとき、第2キー位置判定部28は、電波角度差θxが運転席側角度差範囲Edにあることを確認すると、電子キー2が運転席側車外に位置すると判定し、電波角度差θxが助手席側角度差範囲Epにあることを確認すると、電子キー2が助手席側車外に位置すると判定する。また、電波角度差θxが重複範囲Ebにあることを確認すると、この段階ではまだキー位置を正確に判定できないとして、キー位置判定を第3キー位置判定部29に委ねる。
【0061】
第3キー位置判定部29は、第2キー位置判定部28でキー位置が判定できない場合、正規化グラフ19において、このときの電波角度差θxと運転席側磁界強度Hdと助手席側磁界強度Hpとの3点を繋いで三角線25を算出し、この三角線25の頂点の成す角度θrを算出する。そして、第3キー位置判定部29は、算出した角度θrと閾値角θkとの大小を比較して、電子キー2の位置を最終判断する。このとき、第3キー位置判定部29は、角度θrが閾値角θk以下であれば、電子キー2が運転席側車外に位置すると判定し、角度θrが閾値角よりも大きければ、電子キー2が助手席側車外に位置すると判定する。
【0062】
ここで、第3キー位置判定部29は、車外ドアハンドルノブのタッチ操作をトリガとして開始されたスマート通信であることを以て、このときのスマート通信が車外通信であることを認識している。また、第3キー位置判定部29は、タッチ操作された車外ドアハンドルが、運転席側であることを把握しているので、運転席側に電子キー2が位置すべきであることも認識している。よって、第3キー位置判定部29は、キー位置判定により電子キー2が運転席側車外に位置することを確認すると、車外位置判定を成立として処理する。照合ECU9は、電子キー2との間のスマート照合が成立し、かつ車外位置判定も正しいということを確認すると、車外照合を成立として処理し、ドアロック装置6にドアロック解錠を実行させる。
【0063】
続いて、ドアロックの解錠後、運転者が車内に乗車した場合を想定する。照合ECU9は、運転者が車内に乗車したことを例えばカーテシスイッチ等により確認すると、ドアロックを解錠したときと同じ通信シーケンスで、同様のスマート通信を実行する。よって、この場合、車内判定部30は、運転席アンテナ11からのリクエスト信号Srqの応答としてID信号Sidを受信し、助手席アンテナ13からのリクエスト信号Srqの応答としてID信号Sidを受信し、これら両方のID信号SidでID照合が成立することを確認すると、電子キー2が車内に位置すると判定する。そして、車内判定部30は、車内に位置する電子キー2とのID照合、即ち車内照合が成立することを確認すると、エンジン始動装置7による電源遷移操作及びエンジン始動操作を許可する。
【0064】
今度は、降車した運転者がドアロックを施錠する場合を想定する。照合ECU9は、車両1が停車状態(ドアロック解錠、エンジン停止)の際、運転席ドア10の車外ドアハンドルノブのロックボタン(図示略)が押し操作されたことを検出すると、前述した通信シーケンスと同様のスマート照合を実行する。このときも、運転席アンテナ11及び助手席アンテナ13を交互に車両送信アンテナとしてスマート通信を実行し、運転席側磁界強度Hd及び運転席側電波到来方向Kdと、助手席側磁界強度Hp及び助手席側電波到来方向Kpとを取得する。
【0065】
そして、磁界強度比較部26及びキー位置判定部27〜29は、運転者が運転席ドア10から乗車したときと同様に、正規化グラフ19を使用して電子キー2の位置を判定する。このとき、これらキー位置判定部27〜29が、電子キー2が運転席側車外に位置すると判定すると、車外位置判定が成立として処理される。照合ECU9は、電子キー2との間のスマート照合が成立し、かつ車外位置判定も正しいということを確認すると、車外照合を成立として処理、ドアロック装置6にドアロックの施錠を実行させる。
【0066】
なお、以上は、運転席ドア10から車両1に乗車する例を説明したが、助手席ドア12や後部右側ドアや左側ドアから乗降車する場合の動作も、基本的な動作は運転席ドア10から乗降車する場合と同様であるので、これらの具体例については詳細を省略する。
【0067】
以上により、本例においては、図5や図6に示すような正規化グラフ19を使用して、電子キー2の車外位置判定を実行する。このため、もし仮にアンテナ搭載側と反対側に通信エリアが漏れても、この漏れエリアを通信成立エリアからキャンセルすることが可能となる。よって、アンテナ搭載側の反対側に電子キー2が位置する際に、この電子キー2とスマート照合が成立する状況が生じ難くなるので、より正確に電子キー2の位置を判定することが可能となる。
【0068】
本実施形態の構成によれば、以下に記載の効果を得ることができる。
(1)まずは最初、運転席側磁界強度Hd及び助手席側磁界強度Hpの大小比較によりキー位置を判定し、この強度大小判定でキー位置を判定できない場合、運転席側電波到来方向Kdと助手席側電波到来方向Kpの電波角度差θxによりキー位置を判定し、この角度差判定でキー位置を判定できない場合、正規化グラフ19上でプロットした3点の三角線25が成す角度θrによりキー位置を最終判断する。このように、本例の場合は、複数の判定方式を組み合わせて、電子キー2の車外位置を判定する。よって、電子キー2の判定位置を、より正確に切り分けることが可能となるので、電子キー2が運転席側車外及び助手席車外のどちらに位置するのかを、より精度よく判定することができる。
【0069】
(2)車体運転席側に運転席アンテナ11を配置し、車体助手席側に助手席アンテナ13を配置して、電子キー2が車外及び車内のどちらに位置するのかを判定する。よって、本例の場合は、キー位置判定を車内外判定も可としたので、電子キー2が車外及び車内のどちらに位置するのかも確認することができる。
【0070】
(3)スマート照合の過程でキー位置判定も実行するので、スマート照合の一連の過程で、照合と同時に位置判定も実行することができる。
(4)電子キー2の受信アンテナとして3軸受信アンテナを使用したので、電子キー2の磁界強度Hxや電波到来方向Kxを、より正確に算出することができる。
【0071】
(5)運転席アンテナ11や助手席アンテナ13を車体に取り付ける際、その搭載位置や取り付け角度を調整するので、より好適な通信エリアを車体周囲に形成することができ、ひいてはこれがキー位置の判定精度向上に寄与する。
【0072】
(6)キー操作フリーシステム3は電子キー2からの応答の論理判定によりキー位置を見る方式であるので、車両1に搭載する送信アンテナは運転席アンテナ11と助手席アンテナ13との2つで済む。よって、車両1の搭載アンテナ数を少なく抑えることができ、アンテナに要するコストを削減することができる。従って、本例は、車両1の送信アンテナを少なく抑えつつも、電子キー2の位置判定精度を確保するという極めて優れた効果を得ることができる。
【0073】
なお、実施形態はこれまでに述べた構成に限らず、以下の態様に変更してもよい。
・キー位置判定装置18は、電子キー2の車外位置判定及び車内外判定の両方を実行することに限らず、例えば車外位置判定のみを行うものでもよい。
【0074】
・キー位置判定は、車外位置判定や車内外位置判定に限らず、例えば車内のどの位置にあるのか、又はラッゲージ内に位置しているのかなど、判定内容を適宜変更することが可能である。
【0075】
・車両1の送信アンテナは、運転席アンテナ11や助手席アンテナ13に限らず、例えばラッゲージドアアンテナを含んでもよい。
・車両1の送信アンテナは、2本に限らず、3本としてもよい。
【0076】
・ウェイク信号31は、運転者の所定操作をトリガとして送信が開始されることに限定されない。例えば、車両1が駐車状態の際、車両1に近づく電子キー2を常に監視するために、常時送信としてもよい。
【0077】
・磁界強度Hd,Hpや電波到来方向Kd,Kpは、3軸のベクトル合成値を使用して算出されることに限らず、例えば3軸の中の最大値を使用してもよい。
・電子キー2の受信アンテナは、3軸アンテナに限定されず、例えば1軸アンテナでもよい。
【0078】
・磁界強度Hxや電波到来方向Kxの算出は、ウェイク信号31a,31bで行うことに限らず、例えばビークルID33,38やチャレンジ35,40により算出してもよい。
【0079】
・キー位置判定は、電子キー2から磁界強度データや電波到来方向データを車両1が受け付けて、車両1側で行う形式に限定されない。例えば、キー位置判定までを全て電子キー2側で行い、その判定結果を車両1に通知する形式でもよい。
【0080】
・受信強度は、受信電波の磁界強度Hxに限定されず、電界強度としてもよい。
・電波到来方向Kxの算出は、アダプティブアレーアンテナを使用した方式に限定されず、他の形式を採用してもよい。
【0081】
・キー位置判定は、スマート照合の過程で実行されることに限定されない。即ち、スマート照合とは別の期間に、キー位置判定だけを別に実行してもよい。
・スマート照合は、運転席アンテナ11及び助手席アンテナ13の両方で成立を条件とすることに限らず、どちらか一方のみとしてもよい。
【0082】
・リクエスト信号Srqは、ID返信要求に限らず、電子キー2に応答を求める信号であればよい。
・電子キー2は、車両キーに限定されず、種々の端末(携帯電話、ICカード等)が使用可能である。また、電子キー2は、必ずしもキー機能を持つものに限らず、広義として認証行為が必要な通信端末(認証端末)を広く含むものとする。
【0083】
・キー操作フリーシステム3は、相互通信の往路と復路とで周波数が異なることに限定されず、同じ周波数としてもよい。また、キー操作フリーシステム3の通信周波数は、LFやUHFに限らず、例えばHF(High Frequency)等の他の周波数を使用してもよい。
【0084】
・スマート通信の過程で車両1から電子キー2の電力電波を送信し、この電力電波により電子キー2を駆動させることで、電子キー2を電池レスとしてもよい。
・電子キーシステムは、キー操作フリーシステム3に限定されず、車両1と電子キー2とが相互無線通信によりID照合を行うものであればよい。
【0085】
・キー操作フリーシステム3は、車両1に搭載されることに限らず、他の機器や装置に採用可能である。
次に、上記実施形態及び別例から把握できる技術的思想について、それらの効果とともに以下に追記する。
【0086】
(イ)請求項1〜3のいずれかにおいて、前記電子キーの受信アンテナは、複数軸アンテナにより形成され、前記受信強度算出手段は、前記複数軸アンテナのベクトル合成値を使用して前記受信強度を算出する。この構成によれば、より精度よく受信強度を算出することが可能となる。
【0087】
(ロ)請求項1〜3、前記技術的思想(イ)のいずれかにおいて、前記一アンテナ及び前記他アンテナは、水平面に対する直交方向を基準として角度を持つ向きで取り付けられることにより、取付位置が調整されている。この構成によれば、これらアンテナから好適な通信エリアを形成することが可能となり、ひいては受信強度や電波到来方向を、精度よく算出することが可能となる。
【符号の説明】
【0088】
1…通信マスタとしての車両、2…電子キー、3…電子キーシステムとしてのキー操作フリーシステム、11…一アンテナ及び他アンテナを構成する運転席アンテナ、13…一アンテナ及び他アンテナを構成する助手席アンテナ、18…キー位置判定装置、19…正規化グラフ、21…受信強度算出手段を構成する磁界強度算出部、22…電波方向算出手段を構成する電波到来方向算出部、23…受信強度算出手段及び電波方向算出手段を構成する電波パラメータ通知部、24…受信強度算出手段及び電波方向算出手段を構成する電波パラメータ取得部、25…三角線、26…第1判定手段を構成する磁界強度比較部、27…第1判定手段を構成する第1キー位置判定部、28…第2判定手段を構成する第2キー位置判定部、29…第3判定手段を構成する第3キー位置判定部、Hx(Hd,Hp)…受信強度としての磁界強度、Kx(Kd,Kp)…電波到来方向、Ea…設定強度範囲としての磁界強度範囲、θx…電波角度差、θr…角度。
【特許請求の範囲】
【請求項1】
通信マスタからのID返信要求に応答して電子キーが返信してきたIDコードによりID照合を行う電子キーシステムのキー位置判定装置において、
前記通信マスタの一アンテナ及び他アンテナから交互に電波が送信された際、各電波を前記電子キーが受信したときのそれぞれの受信強度を算出する受信強度算出手段と、
前記した2電波を各々受信した際の電波到来方向を算出する電波方向算出手段と、
前記2つ受信強度を比較し、該受信強度の高い側が設定強度範囲内に位置するか否かを確認することでキー位置を判定する第1判定手段と、
前記第1判定手段でキー位置を判定できない場合、前記一アンテナからの電波到来方向と前記他アンテナからの電波到来方向との電波角度差を基に、キー位置を判定する第2判定手段と、
前記第2判定手段でキー位置を判定できない場合、前記2つ受信強度及び前記電波角度の3点を同一グラフ上に並べた正規化グラフを使用し、当該3点を繋ぐことでできる三角線の頂点の成す角度を基にキー位置を判定する第3判定手段と
を備えたことを特徴とする電子キーシステムのキー位置判定装置。
【請求項2】
前記一アンテナ及び他アンテナの通信エリアは、前記通信マスタの室外及び室内の両方を補完する範囲で形成され、キー位置判定は、前記電子キーが前記通信マスタの室外及び室内のどちらに位置するのかを判定する
ことを特徴とする請求項1に記載の電子キーシステムのキー位置判定装置。
【請求項3】
前記アンテナから前記電子キーに送信される前記電波は、前記電子キーにIDコードの返信を求める前記ID返信要求の信号であって、キー位置判定は、前記通信マスタと前記電子キーとが前記ID照合する過程で実行される
ことを特徴とする請求項1又は2に記載の電子キーシステムのキー位置判定装置。
【請求項1】
通信マスタからのID返信要求に応答して電子キーが返信してきたIDコードによりID照合を行う電子キーシステムのキー位置判定装置において、
前記通信マスタの一アンテナ及び他アンテナから交互に電波が送信された際、各電波を前記電子キーが受信したときのそれぞれの受信強度を算出する受信強度算出手段と、
前記した2電波を各々受信した際の電波到来方向を算出する電波方向算出手段と、
前記2つ受信強度を比較し、該受信強度の高い側が設定強度範囲内に位置するか否かを確認することでキー位置を判定する第1判定手段と、
前記第1判定手段でキー位置を判定できない場合、前記一アンテナからの電波到来方向と前記他アンテナからの電波到来方向との電波角度差を基に、キー位置を判定する第2判定手段と、
前記第2判定手段でキー位置を判定できない場合、前記2つ受信強度及び前記電波角度の3点を同一グラフ上に並べた正規化グラフを使用し、当該3点を繋ぐことでできる三角線の頂点の成す角度を基にキー位置を判定する第3判定手段と
を備えたことを特徴とする電子キーシステムのキー位置判定装置。
【請求項2】
前記一アンテナ及び他アンテナの通信エリアは、前記通信マスタの室外及び室内の両方を補完する範囲で形成され、キー位置判定は、前記電子キーが前記通信マスタの室外及び室内のどちらに位置するのかを判定する
ことを特徴とする請求項1に記載の電子キーシステムのキー位置判定装置。
【請求項3】
前記アンテナから前記電子キーに送信される前記電波は、前記電子キーにIDコードの返信を求める前記ID返信要求の信号であって、キー位置判定は、前記通信マスタと前記電子キーとが前記ID照合する過程で実行される
ことを特徴とする請求項1又は2に記載の電子キーシステムのキー位置判定装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2011−127369(P2011−127369A)
【公開日】平成23年6月30日(2011.6.30)
【国際特許分類】
【出願番号】特願2009−288174(P2009−288174)
【出願日】平成21年12月18日(2009.12.18)
【出願人】(000003551)株式会社東海理化電機製作所 (3,198)
【Fターム(参考)】
【公開日】平成23年6月30日(2011.6.30)
【国際特許分類】
【出願日】平成21年12月18日(2009.12.18)
【出願人】(000003551)株式会社東海理化電機製作所 (3,198)
【Fターム(参考)】
[ Back to top ]