
電子パッケージのはんだ接合用アンダーフィル材選択支援装置、電子パッケージのはんだ接合用アンダーフィル材選択支援プログラム、電子パッケージのはんだ接合用アンダーフィル材の最適物性値算出方法
【課題】実験等の手間を不要とし、効率よく、信頼性の高い電子パッケージを実現可能なはんだ接合用アンダーフィル材選択支援装置等を提供する。
【解決手段】 電子パッケージを構成するアンダーフィル材以外の各部材の寸法に基づいて、有限要素モデルを作成し、電子パッケージを構成する複数のはんだボールのうち、2以上のはんだボールを、最大変位又は最大応力又は最大歪みを有する注目はんだボールとして決定する。注目はんだボールの一部を節点とし、電子パッケージの温度環境情報と各部材の物性値に基づいて、節点の変位を算出し、アンダーフィル材の物性値を最適化の変数Xとして定義して、算出された2つの節点の変位の差(NDi(x,y,z)−NDj(x,y,z))に基づいて目標関数F(X)の値を算出し、目標関数F(X)の値が最小値に収束する変数Xをアンダーフィル材の最適物性値として提示する。
【解決手段】 電子パッケージを構成するアンダーフィル材以外の各部材の寸法に基づいて、有限要素モデルを作成し、電子パッケージを構成する複数のはんだボールのうち、2以上のはんだボールを、最大変位又は最大応力又は最大歪みを有する注目はんだボールとして決定する。注目はんだボールの一部を節点とし、電子パッケージの温度環境情報と各部材の物性値に基づいて、節点の変位を算出し、アンダーフィル材の物性値を最適化の変数Xとして定義して、算出された2つの節点の変位の差(NDi(x,y,z)−NDj(x,y,z))に基づいて目標関数F(X)の値を算出し、目標関数F(X)の値が最小値に収束する変数Xをアンダーフィル材の最適物性値として提示する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、電子パッケージのはんだ接合用アンダーフィル材の選択方法等に関し、特に信頼性の高い電子パッケージの実現可能な電子パッケージのはんだ接合用アンダーフィル材の選択支援装置、及び電子パッケージのはんだ接合用アンダーフィル材の最適物性値算出方法等に関する。
【背景技術】
【0002】
半導体チップと配線基板により構成される電子パッケージは、はんだボールによって半導体チップと配線基板とが電気的に接続される構成となっている。しかしながら、半導体チップと配線基板の熱膨張係数の差が生じるため、半導体チップと基板を接合しただけでは、電子装置の稼動中に繰り返し発熱によりはんだ接合部に熱ストレスと熱変形が発生し、半導体チップと基板が剥離してしまう。はんだ接合部の熱ストレスと熱変形を緩和する目的で、チップと基板間の隙間をアンダーフィル材と呼ばれる樹脂材料等により充填封止する方法が採用されている。
アンダーフィル材としてはエポキシ樹脂が使用されているが、近年では信頼性を高めるため、反応性官能基含有シリコーン化合物を配合したアンダーフィル材や、ケイ素化合物を配合したアンダーフィル材など、添加物を配合したアンダーフィル材の開発が進んでいる。
また、特許文献1〜8に示すように、電子パッケージのはんだ接合部に関する研究開発も進められており、アンダーフィル材は、はんだ接合部に対する補強作用があると認識されている。しかし、アンダーフィル材の最適な物性値を定量的に決める方法は提案されていない。また、非特許文献1はアンダーフィル材に関するガイドラインであるが、“硬いアンダーフィル材を使うほうが良い”という趣旨の記載に止まる。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】米国特許第6617682号明細書
【特許文献2】特許3864259号公報
【特許文献3】特許4247193号公報
【特許文献4】特開2010−16332号公報
【特許文献5】特開2009−279590号公報
【特許文献6】特開2009−152317号公報
【特許文献7】特開2001−68594号公報
【特許文献8】特開2009−129922号公報
【非特許文献】
【0004】
【非特許文献1】IPC (AssociationConnecting Electronics Industries, 3000 Lakeside Drive, 309S Bannockburn, IL 60015−1219 “Guideline for Selection and Application of Underfill Material for Flip Chip and otherMicropackages” JointIndustry Standard J-STD-030 2005
【発明の概要】
【発明が解決しようとする課題】
【0005】
はんだ接合部は、配線基板、半導体チップ、はんだボール及びパッド、アンダーフィル材など、複数の部材の組み合わせにより構成されるため、温度負荷を受けると、各部材の熱膨張係数の差により、熱変形と熱応力が生じる。
アンダーフィル材は、添加物によって価格だけでなく、弾性率や熱膨張係数等の物性値が変化するので、電子部品の実装及び電子パッケージの構造設計の際に、適切なアンダーフィル材を選択することは非常に重要である。適切なアンダーフィル材を選択しないと、各部材の熱膨張係数(CTE: Coeff. of Thermal Expansion)の差により、熱変形及び熱応力、ひずみ、クリープが生じ、はんだ接合部の寿命に大きく影響を与える。特に、はんだ接合部の熱変形は、各部材の熱膨張係数の差による熱変形のほかに、電子パッケージの利用環境、熱負荷の大きさ、半導体チップ及び電子パッケージの寸法、支持条件等様々な要素から複雑に関係している。
【0006】
これまでは、電子パッケージの製造者及び設計者、または、アンダーフィル材の製造者及び開発者が、実験を通して適切なアンダーフィルの物性値を求め、アンダーフィル材の選択を行っていたので、非常に手間がかかっていた。
【0007】
本発明は、このような問題等に鑑みて、利用対象となる電子装置の各部材の熱・機械物性値、半導体チップの寸法、パッケージの寸法、稼動温度などを考慮し、実験等の手間を不要とし、効率よく、信頼性の高い電子パッケージを実現可能なアンダーフィル材の選択支援装置及びアンダーフィル材の最適物性値算出方法等を提供することを目的とする。
【課題を解決するための手段】
【0008】
本発明の電子パッケージのはんだ接合用のアンダーフィル材選択支援装置は、前記電子パッケージを構成するアンダーフィル材以外の各部材の寸法に基づいて、前記電子パッケージの有限要素モデルを作成する作成手段と、前記有限要素モデルにおいて、前記電子パッケージを構成する複数のはんだボールのうち、2以上のはんだボールを、最大変位又は最大応力又は最大歪みを有する注目はんだボールとして決定する決定手段と、前記有限要素モデルにおいて、前記注目はんだボールの複数の節点から一部の節点を選択し、前記電子パッケージの温度環境情報と前記各部材の物性値に基づいて、選択された前記節点の変位を算出する変位算出手段と、前記アンダーフィル材の物性値を最適化の変数Xとして定義する最適化変数定義手段と、前記変位算出手段によって算出された2つの前記節点の変位の差(NDi(x,y,z)−NDj(x,y,z))に基づいて、(1)式に示す目標関数F(X)の値を算出する目標関数算出手段と、前記目標関数算出手段が算出する目標関数F(X)値が最小値に収束する変数Xを前記アンダーフィル材の最適物性値として提示する提示手段と、を有する。
【数1】

【0009】
前記決定手段は、前記電子パッケージの中央付近又は前記電子パッケージの辺の中央付近のはんだボールと、前記電子パッケージの頂点付近のはんだボールを前記注目はんだボールとして決定しもよい。
【0010】
前記目標関数算出手段は、一の前記注目はんだボールの節点のうち、一つの節点と当該節点から最も遠い節点の変位の差に基づいて、(1)式に示す目標関数F(X)の値を算出してもよい。
【0011】
前記目標関数算出手段は、一の前記注目はんだボールと他の前記注目はんだボールの節点のうち、一つの節点と当該節点から最も遠い節点の変位の差に基づいて、(1)式に示す目標関数F(X)の値を算出してもよい。
【0012】
前記最適化変数定義手段は、前記アンダーフィル材の物性値として、熱膨張係数及びヤング率及びポアソン比、熱膨張係数及びヤング率及び横弾性率、又は、ヤング率及びポワソン比、又は、ヤング率及び横弾性率のいずれかの組を最適化の変数Xとして定義してもよい。
【0013】
前記目標関数算出手段は、前記(1)式に基づく近似多項式である(2)式又は(6)式に基づいて、最適化の変数Xを近似計算により求めてもよい。
F(X)=a0+a1X+a2X2 ・・・(2)
F(X)=a0+a1X ・・・(6)
(a0 , a1, a2は係数)
【0014】
本発明のアンダーフィル材選択支援プログラムは、コンピュータを、前記アンダーフィル材選択支援装置として機能させることを特徴とする。
【0015】
本発明の電子パッケージのはんだ接合用のアンダーフィル材の最適物性値算出方法は、前記電子パッケージを構成するアンダーフィル材以外の各部材の寸法に基づいて、前記電子パッケージの有限要素モデルを作成するステップと、前記有限要素モデルにおいて、前記電子パッケージを構成する複数のはんだボールのうち、2以上のはんだボールを、最大変位又は最大応力又は最大歪みを有する注目はんだボールとして決定する決定ステップと、前記有限要素モデルにおいて、前記注目はんだボールの複数の節点から一部の節点を選択し、前記電子パッケージの温度環境情報と前記各部材の物性値に基づいて、選択された前記節点の変位を算出するステップと、前記アンダーフィル材の物性値を最適化の変数Xとして定義する最適化変数定義ステップと、算出された2つの前記節点の変位の差(NDi(x,y,z)−NDj(x,y,z))に基づいて、(1)式に示す目標関数F(X)の値を算出する目標関数算出ステップと、前記目標関数算出ステップにて算出される目標関数F(X)値が最小値に収束する変数Xを前記アンダーフィル材の最適物性値として提示するステップと、を有する。
【数1】
【0016】
前記決定ステップは、前記電子パッケージの中央付近又は前記電子パッケージの辺の中央付近のはんだボールと、前記電子パッケージの頂点付近のはんだボールを前記注目はんだボールとして決定してもよい。
【0017】
前記目標関数算出ステップは、一の前記注目はんだボールの節点のうち、一つの節点と当該節点から最も遠い節点の変位の差に基づいて、(1)式に示す目標関数F(X)の値を算出してもよい。
【0018】
前記目標関数算出ステップは、一の前記注目はんだボールと他の前記注目はんだボールの節点のうち、一つの節点と当該節点から最も遠い節点の変位の差に基づいて、(1)式に示す目標関数F(X)の値を算出してもよい。
【0019】
前記最適化変数定義ステップは、前記アンダーフィル材の物性値として、熱膨張係数及びヤング率及びポアソン比、熱膨張係数及びヤング率及び横弾性率、又は、ヤング率及びポワソン比、又は、ヤング率及び横弾性率のいずれかの組を最適化の変数Xとして定義してもよい。
【0020】
前記目標関数算出ステップは、前記(1)式に基づく近似多項式である(2)式又は(6)式に基づいて、最適化の変数Xを近似計算により求めてもよい。
F(X)=a0+a1X+a2X2 ・・・(2)
F(X)=a0+a1X ・・・(6)
(a0、a1、a2は係数)
【発明の効果】
【0021】
本発明の電子パッケージのはんだ接合用アンダーフィル材選択支援装置によれば、電子パッケージを構成するアンダーフィル材以外の各部材の寸法に基づいて、有限要素モデルを作成し、有限要素モデルにおいて複数のはんだボールから、最大変位又は最大応力又は最大歪みを有する注目はんだボールを決定する。そして、当該注目はんだボールの複数の節点から一部の節点を選択し、電子パッケージの温度環境情報とアンダーフィル材以外の各部材の物性値に基づいて、節点の変位を算出する。算出された節点の変位に対し、節点ペアを決定して、2つの節点の変位の差(NDi(x,y,z)−NDj(x,y,z))に基づいて(1)式に示す目標関数F(X)が最小値に収束する変数Xをアンダーフィル材の最適物性値として提示する。これにより、実験等の手間なく、効率よく、信頼性の高い電子パッケージを実現可能なアンダーフィル材の選択ができる。
【0022】
本発明の電子パッケージのはんだ接合用アンダーフィル材の最適物性値算出方法によれば、電子パッケージを構成するアンダーフィル材以外の各部材の寸法に基づいて、有限要素モデルを作成し、有限要素モデルにおいて複数のはんだボールから、最大変位又は最大応力又は最大歪みを有する注目はんだボールを決定する。そして、当該注目はんだボールの複数の節点から一部の節点を選択し、電子パッケージの温度環境情報とアンダーフィル材以外の各部材の物性値に基づいて、節点の変位を算出する。算出された節点の変位に対し、節点ペアを決定して、2つの節点の変位の差(NDi(x,y,z)−NDj(x,y,z))に基づいて(1)式に示す目標関数F(X)が最小値に収束する変数Xをアンダーフィル材の最適物性値として提示する。これにより、実験等の手間なく、効率よく、信頼性の高い電子パッケージを実現可能なアンダーフィル材の最適物性値を算出できる。
【図面の簡単な説明】
【0023】
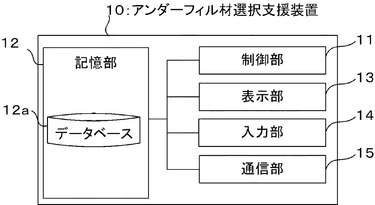
【図1】本発明のアンダーフィル材選択支援装置10の構成例を示すブロック図である。
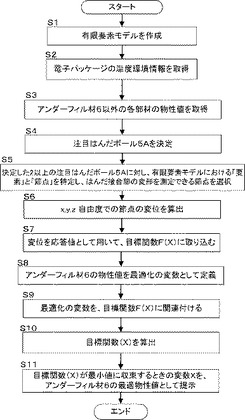
【図2】アンダーフィル材選択支援処理を示すフローチャートである。
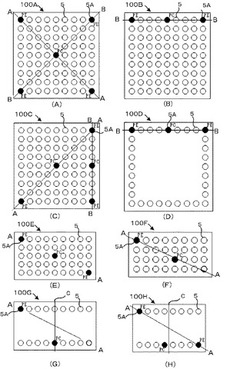
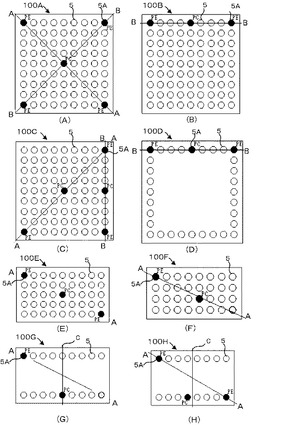
【図3】(A)〜(H)は、電子パッケージのはんだボール5の配置位置を示す平面図の例である。
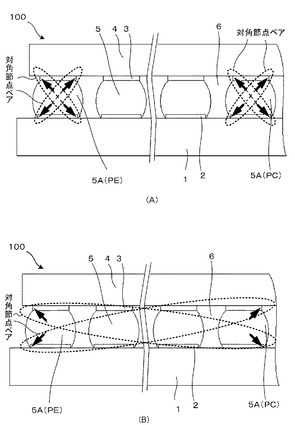
【図4】(A)は、電子パッケージのはんだ接合部の構造の概略とはんだボールの変形を示す断面説明図である。(B)は、電子パッケージのはんだ接合部の構造の概略とはんだボール間の変形を示す断面説明図である。
【図5】(A)は、実験で用いた電子パッケージの概略図である。(B)は、実験で用いた電子パッケージの有限要素モデルである。
【図6】応力コンター図である。
【図7】(A)は、注目はんだボール5A(PE)の節点を示す図である。(B)は、注目はんだボール5A(PC)の節点を示す図である。
【図8】(A)は、軸方向の応力・歪みのヒステリシスループである。(B)は、最大せん断応力・最大せん断歪みある。
【図9】最適化前のアンダーフィルを適用した電子パッケージのはんだボールの応力と歪みを示すグラフである。
【図10】最適化後のアンダーフィルを適用した電子パッケージのはんだボールの応力と歪みを示すグラフである。
【図11】(A)は、記憶部12に記憶された複数のアンダーフィル材6の情報の一例である。(B)は、モニタ表示例である。
【発明を実施するための形態】
【0024】
以下、本発明の実施の形態を説明する。本発明のアンダーフィル材選択支援装置は、電子パッケージの製造業者、アンダーフィル材製造業者、はんだ接合又はアンダーフィル材の研究室等が備える装置であり、はんだ接合部の構造設計者、電子機材の製造者、研究者等が操作する装置である。以下の説明において、アンダーフィル材選択支援装置を操作するはんだ接合部の構造設計者、電子機材の製造者、研究者等を、「操作者」と言う。アンダーフィル材選択支援装置は、アンダーフィル材の最適物性値を算出し、操作者に提示する。
【0025】
図1は、本発明のアンダーフィル材選択支援装置10の構成例を示すブロック図である。
【0026】
アンダーフィル材選択支援装置10は、演算機能を有するCPU、作業用RAM、各種データ及びプログラム(本発明のアンダーフィル材選択支援プログラムを含む)を記憶するROM等から構成された本発明のコンピュータとしての制御部11、ハードディスクドライブ等を備える記憶部12、モニタ等の表示画面を備える表示部13、操作者からの指示を受け付け当該指示に応じた指示信号を制御部11に対して与える入力部(例えば、キーボード、マウス、或いは、操作パネル等)14、各種ネットワーク(LAN(Local Area Network)を含む)を介して他の装置やプリンタ等の周辺機器と通信を行なうための通信部15を備えて構成されている。各構成部材はバスを介して相互に接続されている。
【0027】
制御部11は、他の部材と協動して本発明の作成手段、決定手段、変位算出手段、最適化変数定義手段、目標関数算出手段、提示手段として機能する。
【0028】
図2は、アンダーフィル材選択支援処理を示すフローチャートである。図3(A)〜(H)は、電子パッケージのはんだボール5の配置位置を示す平面図の例である。図4の(A)は、電子パッケージのはんだ接合部の構造の概略とはんだボールの変形を示す断面説明図であり、(B)は、電子パッケージのはんだ接合部の構造の概略とはんだボール間の変形を示す断面説明図である。
【0029】
図4(A)及び(B)に示すように、電子パッケージ100のはんだ接合部は、配線基板1、配線側パッド2、半導体チップ側パッド3、半導体チップ4、はんだボール5及びアンダーフィル材6などにより構成される。
【0030】
配線基板1は、半導体チップ側パッド3及び配線側パッド2及びはんだボール5を通じて、半導体チップ4と電気的に接続される。はんだ接合部の隙間、すなわち、はんだボール5が形成されていない領域は、絶縁性のアンダーフィル材6を用いて充填される。
【0031】
アンダーフィル材選択支援処理は、電子パッケージに最適なアンダーフィル材の物性値を算出し提示する処理であり、操作者が処理の実行を開始したときに制御部11が実行する処理である。
【0032】
まず、アンダーフィル材選択支援装置10の制御部11は、電子パッケージの有限要素モデル(有限要素のメッシュ)を作成する(ステップS1)。有限要素モデルは、配線基板1、配線側パッド2、半導体チップ側パッド3、半導体チップ4、はんだボール5及びアンダーフィル材6など各部材の幾何学的寸法を用いて作成する。なお、有限要素メッシュにはダイボンディングフィルムなどはんだボールの変形に影響の少ない微薄フィルム構造部分を入れても良いが、省略してもよい。
【0033】
次に、制御部11は、電子パッケージの温度環境情報を取得する(ステップS2)。温度環境とは、例えば、非稼働時の環境温度、初期温度、稼動温度、初期温度と極端耐力温度からなる温度荷重等である。
【0034】
次に、制御部11は、アンダーフィル材6以外の各部材の物性値を取得する(ステップS3)。本実施形態では、アンダーフィル材以外の部材を、配線基板1、配線側パッド2、半導体チップ側パッド3、半導体チップ4、はんだボール5とし、これらの物性値を取得する。物性値とは、少なくとも、弾性率、ポアソン比、熱膨張係数、またはクリープ特性値であることが好ましい。
【0035】
なお、ステップS1の幾何学寸法、ステップS2の温度環境情報、ステップS3の各部材の物性値は、入力部14を介して操作者が入力してもよいし、記憶部12のデータベース12aに予め記憶させておき、制御部11が読みだして取得してもよい。
【0036】
続いて、制御部11は、ステップS1で作成した有限要素モデルにおいて、電子パッケージの複数のはんだボール5のうち、注目はんだボール5Aを決定する(ステップS4)。最大変位を有するはんだボール5と、最大応力・最大歪みを有するはんだボール5の少なくとも2つのはんだボール5を注目はんだボール5Aとして決定することが好ましい。
【0037】
ここで、決定条件について説明する。電子パッケージの中央付近又は電子パッケージの辺の中央付近、及び頂点付近に位置するか否かに基づいて、注目はんだボール5Aを決定する。決定条件を満たすはんだボール5のうち、何れのはんだボールを注目はんだボール5Aとするかは、電子パッケージの支持条件に基づいて決定され、有限要素の熱変形解析によって決定する。なお、実験データ等の経験からの類推によって決定してもよい。あるいは、解析と実験とを組み合わせて考察し決定してもよい。
【0038】
図3(A)〜(H)に示す電子パッケージの平面図を用いて注目はんだボール5Aの決定の一例を説明する。なお、半導体チップ、配線側パッド、半導体チップ側パッドは、図示を省略した。
【0039】
図3(A)〜(C)は、9×9の計81個のはんだボール5からなるいわゆるBGA(Ball Grid Array),P-BGA(Plastic-Ball Grid Array)、またはFC-BGA(Flip-Chip Ball Grid Array)方式半導体チップに対応する電子パッケージの平面図の例であり、図3(D)は、電子パッケージの外郭にはんだボール5が配置され、いわゆるQFP(Quad Flat Package)方式半導体チップに対応する電子パッケージの平面図の例である。また、図3(E)及び(F)は、9×5の計45個のはんだボール5からなるいわゆるBGA(Ball Grid Array)、P-BGA(Plastic-Ball Grid Array)方式半導体チップに対応する電子パッケージの平面図の例であり、図3(G)及び(H)は、電子パッケージの1辺と当該1辺と対向する辺にはんだボール5が配置され、いわゆるDIP(Dual In-line Package)方式の電子パッケージの平面図の例である。
【0040】
図3(A)〜(C)、(E)及び(F)の各はんだボール5は、等間隔に配置される。図3(D)及び(G)及び(H)のはんだボール5は、各行又は各列において、等間隔に配置される。なお、図3(A)〜(E)及び(G)に示す電子パッケージは、はんだボール5のグリッドに対称性があるが、図3(F)及び(H)に示す電子パッケージは、はんだボール5のグリッドに対称性がない。
【0041】
図3(A)〜(H)中、注目はんだボール5Aを黒丸、注目はんだボール以外のはんだボール5を白丸で示す。
【0042】
図3(A)は、対称性のあるBGA方式のパッケージの一例であり、A−A対角線上とB−B対角線上のはんだボールが注目はんだボール5Aとして決定された例である。電子パッケージ100Aの頂点付近のはんだボールを、最大応力・最大歪みを有する注目はんだボール5A(図中、PEと示す。)とする。また、電子パッケージ100Aの中央付近のはんだボールが最大変位を有する注目はんだボール5A(図中、PCと示す。)である。A−A対角線とB−B対角線の交点に位置するはんだボールを、最大変位を有する注目はんだボール5A(PC)とする。
【0043】
図3(B)及び図3(D)は、対称支持された基板上に実装するパッケージの一例であり、B−B線上のはんだボールが注目はんだボール5Aとして決定された例である。B−B線上のはんだボールのうち、電子パッケージ100B(又は100D)の頂点付近のはんだボールを、最大応力・最大歪みを有する注目はんだボール5A(PE)とする。また、B−B線の中央付近に位置するはんだボールを、最大変位を有する注目はんだボール5A(PC)とする。
【0044】
図3(C)は、非対称支持されたBAG方式のパッケージの一例であり、A−A対角線上とB−B線上のはんだボールが注目はんだボール5Aとして決定された例である。A−A対角線上とB−B線上のはんだボールのうち、電子パッケージ100Cの頂点付近のはんだボールを、最大応力・最大歪みを有する注目はんだボール5A(PE)とする。A−A対角線の中央付近に位置するはんだボールと、B−B線の中央付近に位置するはんだボールを、最大変位を有する注目はんだボール5A(PC)とする。
【0045】
図3(E)及び図3(F)は、非対称配置のBGA方式パッケージの一例であり、A−A対角線上のはんだボールが注目はんだボール5Aとして決定された例である。A−A対角線上のはんだボールのうち、電子パッケージ100E(又は100F)の頂点付近のはんだボールを、最大応力・最大歪みを有する注目はんだボール5A(PE)とする。また、A−A対角線の中央付近に位置するはんだボールを、最大変位を有する注目はんだボール5A(PC)とする。
【0046】
図3(G)及び図3(H)は、DIP方式パッケージの一例であり、A−A対角線上のはんだボールが注目はんだボール5Aとして決定された例である。A−A対角線上のはんだボールのうち、電子パッケージ100G(又は100H)の頂点付近のはんだボールを、最大応力・最大歪みを有する注目はんだボール5A(PE)とする。また、電子パッケージ100G(又は100H)の対向する2辺であって、はんだボール5の列と平行な辺の中心点を結ぶ線C上又は線C付近に位置するはんだボールを、注目はんだボール5A(PC)とする。
【0047】
続いて制御部11は、決定した2以上の注目はんだボール5Aに対し、有限要素モデルにおける「要素」と「節点」を特定し、はんだ接合部の変形を測定できる節点を選択する(ステップS5)。
【0048】
ところで、はんだ接合部の熱変形は「ローカル変形」と「グローバル変形」として認識されている。「ローカル変形」は,主にはんだボール自身の変形である。「グローバル変形」は電子パッケージ100全体に生じる変形である。図4(A)はローカル変形を計算する説明図であり、図4(B)はグローバル変形を計算する説明図である。有限要素の熱変形解析により、最も変形している箇所、最も変位している箇所の節点を選択する。
【0049】
ローカル変形は、注目はんだボール5A自身の変形である。有限要素の熱変形解析により特定される。図4(A)は、選択された「節点」のうち、注目はんだボール5A(PE)の四隅と注目はんだボール5A(PC)の四隅、計8つの節点(図中矢印で示す)が選択された例である。
【0050】
一方、グローバル変形は、電子パッケージ100全体に生じる変形である。有限要素の熱変形解析により特定される。図4(B)は、選択された「節点」のうち、2つの注目はんだボール5Aの半導体チップ側パッド3と配線基板側パッド2との接点であって、注目はんだボール5A(PE)の電子パッケージ100の外側の節点と、注目はんだボール5A(PC)の節点の計4つの節点(図中矢印で示す)が選択された例である。
【0051】
次に制御部11は、ステップS5において選択された節点に対し、ステップS2で取得した温度環境情報及びステップS3で取得したアンダーフィル材以外の部材の物性値を用いて、ステップS1にて作成した有限要素モデルにおける有限要素法による変形解析を行い、x,y,z自由度での節点の変位を算出する(ステップS6)。
【0052】
次に制御部11は、ステップS6で取得した変位を応答値として用いて、(1)式の目標関数F(X)に取り込む(ステップS7)。
【0053】
【数1】
なお、(1)式中、重み係数wは一般的に計算上は0.5乃至1.5のいずれかの値となる。特に1.0を用いる場合が多い。しかし、電子パッケージの支持条件や実験条件により異なる場合があるため最適化の上決定する。
【0054】
「ローカル変形」の場合、ステップS5にて選択された節点のうち、1つの注目はんだボール5Aの一つの節点と当該節点から最も遠い節点との組を「節点ペア」とする。そして、目標関数には、注目はんだボール5A自身の変形として、節点ペアのx,y,z 自由度ごとに変位の差(NDi(x,y,z)−NDj(x,y,z))の平方値を取り扱う。
【0055】
「グローバル変形」の場合、ステップS5にて選択された節点のうち、2つの注目はんだボール5Aの節点のうち、一つの節点と当該節点から最も遠い節点との組を「節点ペア」とする。目標関数には、電子パッケージ100全体に生じる変形として、節点ペアのx,y,z 自由度ごとに変位の差(NDi(x,y,z)−NDj(x,y,z))の平方値を取り扱う(ステップS7)。
【0056】
図4(A)(B)中、節点ペアを点線で囲んで示す。
【0057】
次に、制御部11は、アンダーフィル材6の物性値を最適化の変数Xとして定義する(ステップS8)。アンダーフィル材の「熱膨張係数及びヤング率及びポアソン比」、「熱膨張係数及びヤング率及び横弾性率」、又は、「ヤング率及びポワソン比」、又は、「ヤング率及び横弾性率」のいずれかの組を最適化の変数として定義する。物性値(変数)の上限と下限を設定してもよい。また、繰り返し演算する際のインクリメント値も定義する。これら物性値、物性値の上限下限、及びインクリメント値は入力部14を介して操作者が入力してもよいし、記憶部12に予め記憶させておき、制御部11が読みだして取得してもよい。
【0058】
続いて、制御部11は、ステップS8で定義した最適化の変数Xを、ステップS7で定義した目標関数F(X)に関連付ける(ステップS9)。
【0059】
そして、制御部11は、目標関数F(X)を算出する(ステップS10)。なお、有限要素法の定式化は複雑であるため、一次或いは二次の多項式を用いて近似計算を行う。
【0060】
注目はんだボール5Aの応答変位を目標関数とする試行関数Fを組み立て、変数Xの関数として(2)式のように2次多項式を用いて近似で表すことができる。
F(X)=a0+a1X+a2X2 ・・・(2)
【0061】
変数Xに対し,初期値のX0を与え、注目はんだボール5Aの節点の変位応答F0を得ているとき、第一回の試行解析によって、目標関数として(1)式から勾配F0′及び係数a0、a1、a2を(3)式〜(5)式により求めることができる。
F0=a0+a1X0+a2X02 ・・・(3)
F0′=a1+2a2X0 ・・・(4)
F1=a0+a1X1+a2X12 ・・・(5)
【0062】
一方、相対応答変位を目標関数とする試行関数Fを組み立て、変数Xの関数として(6)式のように1次多項式を用いて近似で表すこともできる。
F(X)=a0+a1X ・・・(6)
【0063】
変数Xに対し、初期値のX0を与え、注目はんだボール5Aの節点の変位応答F0を得ているとき、第一回の試行解析によって、目標関数として(1)式から勾配F0′ 及び係数a0、a1を(7)式〜(9)式により求めることができる。
F0=a0+a1X0 ・・・(7)
F0′=a1 ・・・(8)
F1=a0+a1X1 ・・・(9)
【0064】
このように、(2)乃至(5)式、又は(6)乃至(9)式にて得られた変数X1を有限要素のモデルに用いて、同じ手順で次のX2、X3・・・を求める。繰り返し解析により、F(X)が最小値に収束する変数Xを求める。F(X)が最小値に収束する変数Xがアンダーフィル材6の最適物性値となる。
【0065】
制御部11は、(2)乃至(5)式、又は(6)乃至(9)式にて算出された変数Xをアンダーフィル材6の最適物性値として表示部13のモニタ等に提示し(ステップS11)、処理を終了する。
【0066】
(実験例)
本発明によるアンダーフィル材選択支援装置10を用いて、最適なアンダーフィル材6の物性値を求めた。
【0067】
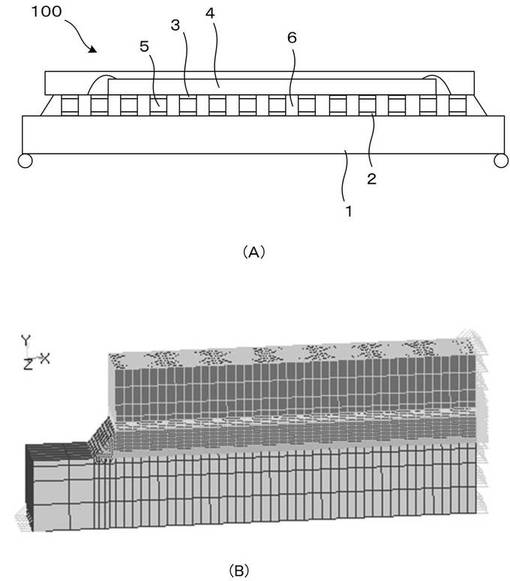
図5(A)は、実験で用いた電子パッケージの概略図である。直列14ピンのはんだボールを有する電子パッケージを想定した。また、稼働温度は90度、初期温度を25度と想定した。
【0068】
図5(A)に示す電子パッケージが対称であると想定し、電子パッケージは両端を固定支持されているものと想定した。アンダーフィル材選択支援装置10により有限要素モデルを作成する。図5(B)は、作成された有限要素モデルである。
【0069】
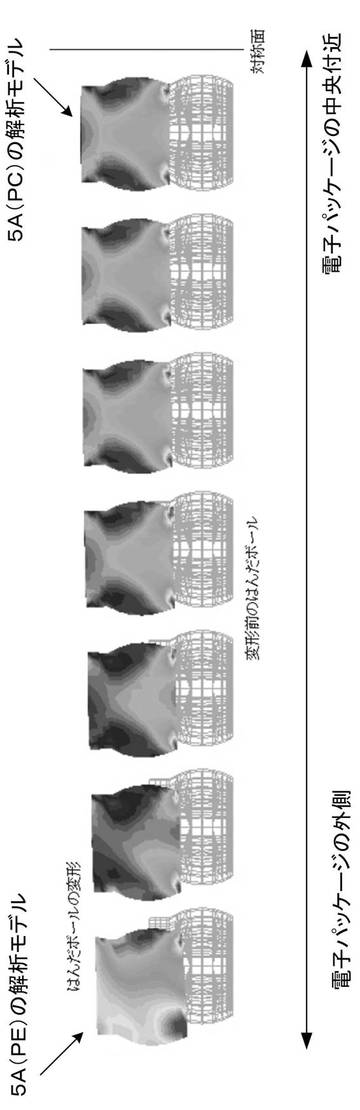
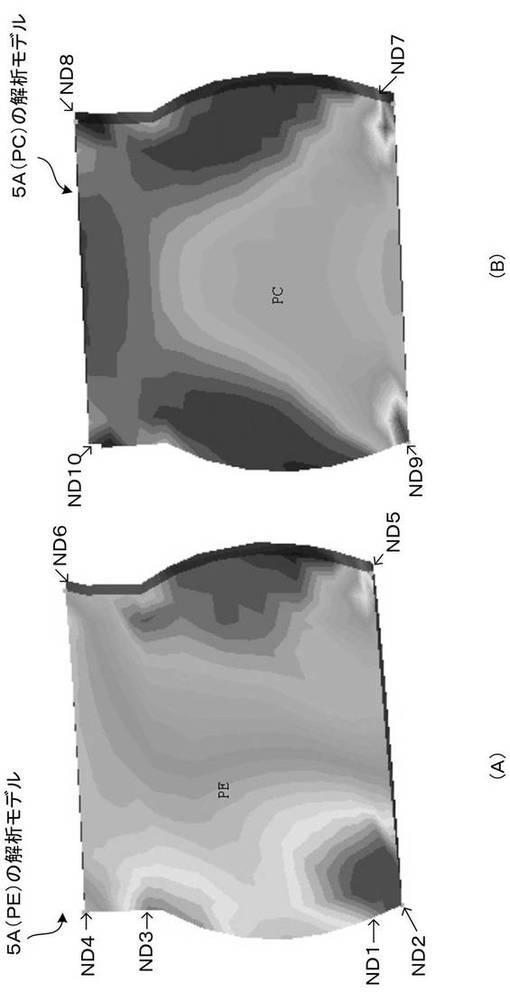
次に、アンダーフィル材選択支援装置10は、有限要素の熱変形解析を行った。解析結果から得られたはんだボールの変形を示す応力コンター図を図6に示す。図6において左側が電子パッケージの左端であり、右側が電子パッケージの中央(対称面)である。
【0070】
解析結果から、電子パッケージの最左端のはんだボールを、最大応力または最大歪みを有する注目はんだボール5A(PE)として選択し、電子パッケージの中央のはんだボールを最大変位を有する注目はんだボール5A(PC)として選択した。さらに、注目はんだボール5A(PE)及び5A(PC)に対して、有限要素モデルにおける複数の節点の中から、はんだ接合部の変形を計算できる節点を選択した。
【0071】
図7(A)は、注目はんだボール5A(PE)の節点を示す図であり、図7(B)は、注目はんだボール5A(PC)の節点を示す図である。注目はんだボール5A(PE)及び5A(PC)に対して、合計10個の節点を選択した。
【0072】
選択された10個の節点について、ND2とND6、ND4とND5、ND9とND8、ND10とND7の節点のX,Y,Z 方向での変位の差をローカル変形として目標関数F(X)に取り込む。なお、重み係数wを1とする。
【0073】
また、節点ND2とND8、ND4とND7に対し、X,Y,Z 方向での変位の差をはんだボールのグローバル変形として目標関数F(X)に取り込む。なお、重み係数wを1とする。
【0074】
さらに、算出対象となるアンダーフィル材の物性値(ヤング率、ポアソン比及び熱膨張係数等)の初期値を目標関数F(X)に取り込む。各初期値は以下の通りである。
(初期値)
ヤング率:11GPa
ポアソン比:0.33
熱膨張係数:42ppm
【0075】
アンダーフィル材選択支援装置10により、目標関数F(X)が最小値に収束する変数Xを最適なアンダーフィル物性値として得た。
(最適アンダーフィル物性値)
ヤング率:12.8GPa
ポアソン比:0.3
熱膨張係数:40ppm
【0076】
上記最適物性値を有するアンダーフィル材を用いた電子パッケージと、最適物性値を有しないアンダーフィル材を用いた電子パッケージについて、それぞれはんだボールの応力、歪み及びクリープ歪みを比較した。なお、以下の説明において、最適物性値を有しないアンダーフィル材を用いた電子パッケージを「最適化前のアンダーフィル」とし、最適物性値を有するアンダーフィル材を用いた電子パッケージを「最適化後のアンダーフィル」として説明する。
【0077】
図8(A)は、軸方向(z軸)の応力・歪みのヒステリシスループを示し、図8(B)は、最大せん断応力・最大せん断歪みを示す。三角形プロットによる破線が、最適化前のアンダーフィルのデータであり、丸形プロットの実線が、最適化後のアンダーフィルのデータである。
【0078】
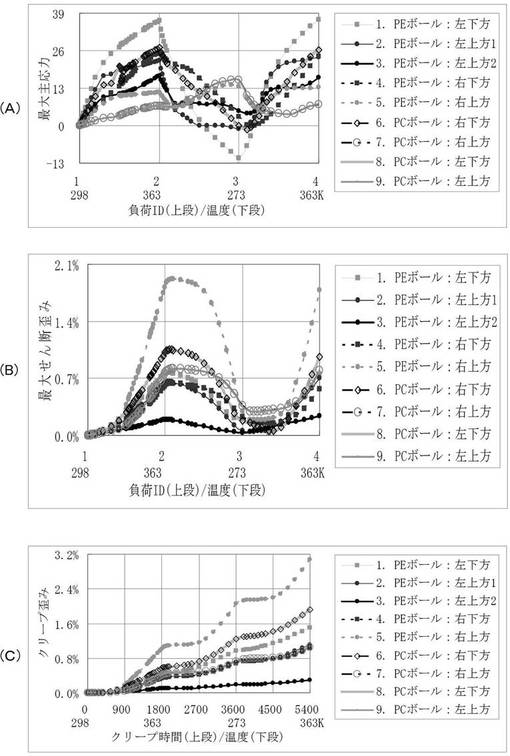
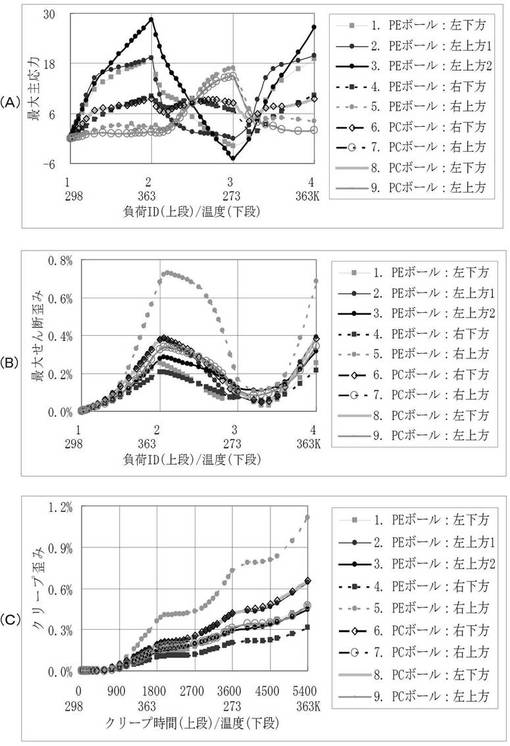
図9は、最適化前のアンダーフィルを適用した電子パッケージのはんだボールの応力と歪みを示すグラフであり、図10は、最適化後のアンダーフィルを適用した電子パッケージのはんだボールの応力と歪みを示すグラフである。なお、図9及び図10において、PEボールは注目はんだボール5A(PE)のデータであり、PCボールは注目はんだボール5B(PC)のデータである。
【0079】
図9(A)及び図10(A)は、最大主応力を示すグラフであり、図9(B)及び図10(B)は、最大せん断歪みを示すグラフであり、図9(C)及び図10(C)は、クリープ歪みを示すグラフであり、
【0080】
これらのグラフを考査すると、最適化後のアンダーフィル材を用いることにより、最大応力、最大せん断歪みに関しては2倍以上改良され、クリープ歪みに関しては3倍程度改良される結果を得た。
【0081】
以上のように、本実施形態のアンダーフィル材選択支援装置10によれば、電子パッケージ100を構成するアンダーフィル材以外の各部材の寸法に基づいて、有限要素モデルを作成し、有限要素モデルにおいて複数のはんだボール5から、最大変位又は最大応力又は最大歪みを有する注目はんだボール5Aを決定する。そして、当該注目はんだボール5Aの複数の節点から一部の節点を選択し、電子パッケージ100の温度環境情報とアンダーフィル材以外の各部材の物性値に基づいて、節点の変位を算出し、算出された2つの節点の変位の差(NDi(x,y,z)−NDj(x,y,z))に基づいて(1)式に示す目標関数F(X)が最小値に収束する変数Xをアンダーフィル材の最適物性値として提示する。これにより、実験等の手間なく、効率よく、信頼性の高い電子パッケージを実現可能なアンダーフィル材6の選択ができる。適正なアンダーフィル物性値を得ることにより、はんだ接合部の変形を防止し、はんだ接合部の応力歪みの低減を実現できる。
【0082】
また、電子パッケージ100の中央付近又は電子パッケージ100の辺の中央付近のはんだボール5と、電子パッケージ100の頂点付近のはんだボール5を、注目はんだボール5Aとして決定することにより、「ローカル変形」と「グローバル変形」を的確に解析することができる。
【0083】
さらに、注目はんだボール5Aの節点のうち、一つの節点と当該節点から最も遠い節点の変位の差に基づいて、(1)式の目標関数F(X)が最小値に収束する変数Xをアンダーフィル材の最適物性値とすれば、ローカル変形及びグローバル変形に対して耐性の高い電子パッケージを実現可能なアンダーフィル材6の物性値を得ることができる。
【0084】
なお、本発明による目標関数F(X)の算出手法は、(2)式又は(6)式に基づく近似計算に限定されるものではない。例えば、変数Xに対し正則化の手法を用いて処理すれば、級数または、三角級数による近似計算により目標関数F(X)を算出してもよい。
【0085】
(応用例)
また、既存のアンダーフィル材から適正なアンダーフィルを選択する場合、アンダーフィル材選択支援装置10の記憶部12に、複数のアンダーフィル材6の情報を登録する。アンダーフィル材6の物性値を提示する際、記憶部12を参照して、算出されたアンダーフィル材6の物性値に近いアンダーフィル材6の情報を、表示部13のモニタに提示するよう構成してもよい。
【0086】
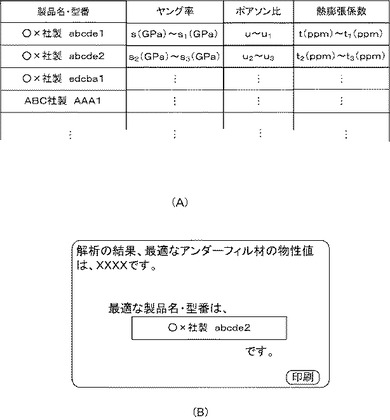
図11(A)は、記憶部12に記憶された複数のアンダーフィル材6の情報の一例である。図11(A)に示す例では、物性値(ヤング率、ポアソン比、熱膨張係数)が製品名・型番に対応付けて登録されている。
【0087】
制御部11は、上記ステップS11でアンダーフィル材6の物性値を提示する際、記憶部12を参照して、算出されたアンダーフィル材6の物性値に近い(または算出された物性値が製品の物性値の範囲に適合する)アンダーフィル材6の情報と共に提示する。図11(B)は、モニタ表示例である。
【0088】
この構成により、アンダーフィル材選択支援装置10の操作者であるはんだ接合部の構造設計者、電子機材の製造者、研究者等は、最適なアンダーフィル材の情報を一目で把握することができる。また、図11(B)に示すように、印刷ボタンを設けた。入力部14を介して操作者が当該印刷ボタンを選択することにより、算出されたアンダーフィル材6の物性値と、当該物性値に近いアンダーフィル材6の情報を印刷することもできる。
【0089】
本発明の適用範囲は上記実施形態に限定されることはない。本発明は、信頼性の高い電子パッケージを実現可能なアンダーフィル材の物性値の算出等に対し、広く適用することができる。
【符号の説明】
【0090】
10 アンダーフィル材選択支援装置
11 制御部
12 記憶部
12a データベース
13 表示部
14 入力部
15 通信部
100、100A、100B、100C、100D、100E、100F、100G、100H 電子パッケージ
1 配線基板
2 配線基板側パッド
3 半導体チップ側パッド
4 半導体チップ
5 はんだボール
5A 注目はんだボール
6 アンダーフィル材
【技術分野】
【0001】
本発明は、電子パッケージのはんだ接合用アンダーフィル材の選択方法等に関し、特に信頼性の高い電子パッケージの実現可能な電子パッケージのはんだ接合用アンダーフィル材の選択支援装置、及び電子パッケージのはんだ接合用アンダーフィル材の最適物性値算出方法等に関する。
【背景技術】
【0002】
半導体チップと配線基板により構成される電子パッケージは、はんだボールによって半導体チップと配線基板とが電気的に接続される構成となっている。しかしながら、半導体チップと配線基板の熱膨張係数の差が生じるため、半導体チップと基板を接合しただけでは、電子装置の稼動中に繰り返し発熱によりはんだ接合部に熱ストレスと熱変形が発生し、半導体チップと基板が剥離してしまう。はんだ接合部の熱ストレスと熱変形を緩和する目的で、チップと基板間の隙間をアンダーフィル材と呼ばれる樹脂材料等により充填封止する方法が採用されている。
アンダーフィル材としてはエポキシ樹脂が使用されているが、近年では信頼性を高めるため、反応性官能基含有シリコーン化合物を配合したアンダーフィル材や、ケイ素化合物を配合したアンダーフィル材など、添加物を配合したアンダーフィル材の開発が進んでいる。
また、特許文献1〜8に示すように、電子パッケージのはんだ接合部に関する研究開発も進められており、アンダーフィル材は、はんだ接合部に対する補強作用があると認識されている。しかし、アンダーフィル材の最適な物性値を定量的に決める方法は提案されていない。また、非特許文献1はアンダーフィル材に関するガイドラインであるが、“硬いアンダーフィル材を使うほうが良い”という趣旨の記載に止まる。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】米国特許第6617682号明細書
【特許文献2】特許3864259号公報
【特許文献3】特許4247193号公報
【特許文献4】特開2010−16332号公報
【特許文献5】特開2009−279590号公報
【特許文献6】特開2009−152317号公報
【特許文献7】特開2001−68594号公報
【特許文献8】特開2009−129922号公報
【非特許文献】
【0004】
【非特許文献1】IPC (AssociationConnecting Electronics Industries, 3000 Lakeside Drive, 309S Bannockburn, IL 60015−1219 “Guideline for Selection and Application of Underfill Material for Flip Chip and otherMicropackages” JointIndustry Standard J-STD-030 2005
【発明の概要】
【発明が解決しようとする課題】
【0005】
はんだ接合部は、配線基板、半導体チップ、はんだボール及びパッド、アンダーフィル材など、複数の部材の組み合わせにより構成されるため、温度負荷を受けると、各部材の熱膨張係数の差により、熱変形と熱応力が生じる。
アンダーフィル材は、添加物によって価格だけでなく、弾性率や熱膨張係数等の物性値が変化するので、電子部品の実装及び電子パッケージの構造設計の際に、適切なアンダーフィル材を選択することは非常に重要である。適切なアンダーフィル材を選択しないと、各部材の熱膨張係数(CTE: Coeff. of Thermal Expansion)の差により、熱変形及び熱応力、ひずみ、クリープが生じ、はんだ接合部の寿命に大きく影響を与える。特に、はんだ接合部の熱変形は、各部材の熱膨張係数の差による熱変形のほかに、電子パッケージの利用環境、熱負荷の大きさ、半導体チップ及び電子パッケージの寸法、支持条件等様々な要素から複雑に関係している。
【0006】
これまでは、電子パッケージの製造者及び設計者、または、アンダーフィル材の製造者及び開発者が、実験を通して適切なアンダーフィルの物性値を求め、アンダーフィル材の選択を行っていたので、非常に手間がかかっていた。
【0007】
本発明は、このような問題等に鑑みて、利用対象となる電子装置の各部材の熱・機械物性値、半導体チップの寸法、パッケージの寸法、稼動温度などを考慮し、実験等の手間を不要とし、効率よく、信頼性の高い電子パッケージを実現可能なアンダーフィル材の選択支援装置及びアンダーフィル材の最適物性値算出方法等を提供することを目的とする。
【課題を解決するための手段】
【0008】
本発明の電子パッケージのはんだ接合用のアンダーフィル材選択支援装置は、前記電子パッケージを構成するアンダーフィル材以外の各部材の寸法に基づいて、前記電子パッケージの有限要素モデルを作成する作成手段と、前記有限要素モデルにおいて、前記電子パッケージを構成する複数のはんだボールのうち、2以上のはんだボールを、最大変位又は最大応力又は最大歪みを有する注目はんだボールとして決定する決定手段と、前記有限要素モデルにおいて、前記注目はんだボールの複数の節点から一部の節点を選択し、前記電子パッケージの温度環境情報と前記各部材の物性値に基づいて、選択された前記節点の変位を算出する変位算出手段と、前記アンダーフィル材の物性値を最適化の変数Xとして定義する最適化変数定義手段と、前記変位算出手段によって算出された2つの前記節点の変位の差(NDi(x,y,z)−NDj(x,y,z))に基づいて、(1)式に示す目標関数F(X)の値を算出する目標関数算出手段と、前記目標関数算出手段が算出する目標関数F(X)値が最小値に収束する変数Xを前記アンダーフィル材の最適物性値として提示する提示手段と、を有する。
【数1】
【0009】
前記決定手段は、前記電子パッケージの中央付近又は前記電子パッケージの辺の中央付近のはんだボールと、前記電子パッケージの頂点付近のはんだボールを前記注目はんだボールとして決定しもよい。
【0010】
前記目標関数算出手段は、一の前記注目はんだボールの節点のうち、一つの節点と当該節点から最も遠い節点の変位の差に基づいて、(1)式に示す目標関数F(X)の値を算出してもよい。
【0011】
前記目標関数算出手段は、一の前記注目はんだボールと他の前記注目はんだボールの節点のうち、一つの節点と当該節点から最も遠い節点の変位の差に基づいて、(1)式に示す目標関数F(X)の値を算出してもよい。
【0012】
前記最適化変数定義手段は、前記アンダーフィル材の物性値として、熱膨張係数及びヤング率及びポアソン比、熱膨張係数及びヤング率及び横弾性率、又は、ヤング率及びポワソン比、又は、ヤング率及び横弾性率のいずれかの組を最適化の変数Xとして定義してもよい。
【0013】
前記目標関数算出手段は、前記(1)式に基づく近似多項式である(2)式又は(6)式に基づいて、最適化の変数Xを近似計算により求めてもよい。
F(X)=a0+a1X+a2X2 ・・・(2)
F(X)=a0+a1X ・・・(6)
(a0 , a1, a2は係数)
【0014】
本発明のアンダーフィル材選択支援プログラムは、コンピュータを、前記アンダーフィル材選択支援装置として機能させることを特徴とする。
【0015】
本発明の電子パッケージのはんだ接合用のアンダーフィル材の最適物性値算出方法は、前記電子パッケージを構成するアンダーフィル材以外の各部材の寸法に基づいて、前記電子パッケージの有限要素モデルを作成するステップと、前記有限要素モデルにおいて、前記電子パッケージを構成する複数のはんだボールのうち、2以上のはんだボールを、最大変位又は最大応力又は最大歪みを有する注目はんだボールとして決定する決定ステップと、前記有限要素モデルにおいて、前記注目はんだボールの複数の節点から一部の節点を選択し、前記電子パッケージの温度環境情報と前記各部材の物性値に基づいて、選択された前記節点の変位を算出するステップと、前記アンダーフィル材の物性値を最適化の変数Xとして定義する最適化変数定義ステップと、算出された2つの前記節点の変位の差(NDi(x,y,z)−NDj(x,y,z))に基づいて、(1)式に示す目標関数F(X)の値を算出する目標関数算出ステップと、前記目標関数算出ステップにて算出される目標関数F(X)値が最小値に収束する変数Xを前記アンダーフィル材の最適物性値として提示するステップと、を有する。
【数1】
【0016】
前記決定ステップは、前記電子パッケージの中央付近又は前記電子パッケージの辺の中央付近のはんだボールと、前記電子パッケージの頂点付近のはんだボールを前記注目はんだボールとして決定してもよい。
【0017】
前記目標関数算出ステップは、一の前記注目はんだボールの節点のうち、一つの節点と当該節点から最も遠い節点の変位の差に基づいて、(1)式に示す目標関数F(X)の値を算出してもよい。
【0018】
前記目標関数算出ステップは、一の前記注目はんだボールと他の前記注目はんだボールの節点のうち、一つの節点と当該節点から最も遠い節点の変位の差に基づいて、(1)式に示す目標関数F(X)の値を算出してもよい。
【0019】
前記最適化変数定義ステップは、前記アンダーフィル材の物性値として、熱膨張係数及びヤング率及びポアソン比、熱膨張係数及びヤング率及び横弾性率、又は、ヤング率及びポワソン比、又は、ヤング率及び横弾性率のいずれかの組を最適化の変数Xとして定義してもよい。
【0020】
前記目標関数算出ステップは、前記(1)式に基づく近似多項式である(2)式又は(6)式に基づいて、最適化の変数Xを近似計算により求めてもよい。
F(X)=a0+a1X+a2X2 ・・・(2)
F(X)=a0+a1X ・・・(6)
(a0、a1、a2は係数)
【発明の効果】
【0021】
本発明の電子パッケージのはんだ接合用アンダーフィル材選択支援装置によれば、電子パッケージを構成するアンダーフィル材以外の各部材の寸法に基づいて、有限要素モデルを作成し、有限要素モデルにおいて複数のはんだボールから、最大変位又は最大応力又は最大歪みを有する注目はんだボールを決定する。そして、当該注目はんだボールの複数の節点から一部の節点を選択し、電子パッケージの温度環境情報とアンダーフィル材以外の各部材の物性値に基づいて、節点の変位を算出する。算出された節点の変位に対し、節点ペアを決定して、2つの節点の変位の差(NDi(x,y,z)−NDj(x,y,z))に基づいて(1)式に示す目標関数F(X)が最小値に収束する変数Xをアンダーフィル材の最適物性値として提示する。これにより、実験等の手間なく、効率よく、信頼性の高い電子パッケージを実現可能なアンダーフィル材の選択ができる。
【0022】
本発明の電子パッケージのはんだ接合用アンダーフィル材の最適物性値算出方法によれば、電子パッケージを構成するアンダーフィル材以外の各部材の寸法に基づいて、有限要素モデルを作成し、有限要素モデルにおいて複数のはんだボールから、最大変位又は最大応力又は最大歪みを有する注目はんだボールを決定する。そして、当該注目はんだボールの複数の節点から一部の節点を選択し、電子パッケージの温度環境情報とアンダーフィル材以外の各部材の物性値に基づいて、節点の変位を算出する。算出された節点の変位に対し、節点ペアを決定して、2つの節点の変位の差(NDi(x,y,z)−NDj(x,y,z))に基づいて(1)式に示す目標関数F(X)が最小値に収束する変数Xをアンダーフィル材の最適物性値として提示する。これにより、実験等の手間なく、効率よく、信頼性の高い電子パッケージを実現可能なアンダーフィル材の最適物性値を算出できる。
【図面の簡単な説明】
【0023】
【図1】本発明のアンダーフィル材選択支援装置10の構成例を示すブロック図である。
【図2】アンダーフィル材選択支援処理を示すフローチャートである。
【図3】(A)〜(H)は、電子パッケージのはんだボール5の配置位置を示す平面図の例である。
【図4】(A)は、電子パッケージのはんだ接合部の構造の概略とはんだボールの変形を示す断面説明図である。(B)は、電子パッケージのはんだ接合部の構造の概略とはんだボール間の変形を示す断面説明図である。
【図5】(A)は、実験で用いた電子パッケージの概略図である。(B)は、実験で用いた電子パッケージの有限要素モデルである。
【図6】応力コンター図である。
【図7】(A)は、注目はんだボール5A(PE)の節点を示す図である。(B)は、注目はんだボール5A(PC)の節点を示す図である。
【図8】(A)は、軸方向の応力・歪みのヒステリシスループである。(B)は、最大せん断応力・最大せん断歪みある。
【図9】最適化前のアンダーフィルを適用した電子パッケージのはんだボールの応力と歪みを示すグラフである。
【図10】最適化後のアンダーフィルを適用した電子パッケージのはんだボールの応力と歪みを示すグラフである。
【図11】(A)は、記憶部12に記憶された複数のアンダーフィル材6の情報の一例である。(B)は、モニタ表示例である。
【発明を実施するための形態】
【0024】
以下、本発明の実施の形態を説明する。本発明のアンダーフィル材選択支援装置は、電子パッケージの製造業者、アンダーフィル材製造業者、はんだ接合又はアンダーフィル材の研究室等が備える装置であり、はんだ接合部の構造設計者、電子機材の製造者、研究者等が操作する装置である。以下の説明において、アンダーフィル材選択支援装置を操作するはんだ接合部の構造設計者、電子機材の製造者、研究者等を、「操作者」と言う。アンダーフィル材選択支援装置は、アンダーフィル材の最適物性値を算出し、操作者に提示する。
【0025】
図1は、本発明のアンダーフィル材選択支援装置10の構成例を示すブロック図である。
【0026】
アンダーフィル材選択支援装置10は、演算機能を有するCPU、作業用RAM、各種データ及びプログラム(本発明のアンダーフィル材選択支援プログラムを含む)を記憶するROM等から構成された本発明のコンピュータとしての制御部11、ハードディスクドライブ等を備える記憶部12、モニタ等の表示画面を備える表示部13、操作者からの指示を受け付け当該指示に応じた指示信号を制御部11に対して与える入力部(例えば、キーボード、マウス、或いは、操作パネル等)14、各種ネットワーク(LAN(Local Area Network)を含む)を介して他の装置やプリンタ等の周辺機器と通信を行なうための通信部15を備えて構成されている。各構成部材はバスを介して相互に接続されている。
【0027】
制御部11は、他の部材と協動して本発明の作成手段、決定手段、変位算出手段、最適化変数定義手段、目標関数算出手段、提示手段として機能する。
【0028】
図2は、アンダーフィル材選択支援処理を示すフローチャートである。図3(A)〜(H)は、電子パッケージのはんだボール5の配置位置を示す平面図の例である。図4の(A)は、電子パッケージのはんだ接合部の構造の概略とはんだボールの変形を示す断面説明図であり、(B)は、電子パッケージのはんだ接合部の構造の概略とはんだボール間の変形を示す断面説明図である。
【0029】
図4(A)及び(B)に示すように、電子パッケージ100のはんだ接合部は、配線基板1、配線側パッド2、半導体チップ側パッド3、半導体チップ4、はんだボール5及びアンダーフィル材6などにより構成される。
【0030】
配線基板1は、半導体チップ側パッド3及び配線側パッド2及びはんだボール5を通じて、半導体チップ4と電気的に接続される。はんだ接合部の隙間、すなわち、はんだボール5が形成されていない領域は、絶縁性のアンダーフィル材6を用いて充填される。
【0031】
アンダーフィル材選択支援処理は、電子パッケージに最適なアンダーフィル材の物性値を算出し提示する処理であり、操作者が処理の実行を開始したときに制御部11が実行する処理である。
【0032】
まず、アンダーフィル材選択支援装置10の制御部11は、電子パッケージの有限要素モデル(有限要素のメッシュ)を作成する(ステップS1)。有限要素モデルは、配線基板1、配線側パッド2、半導体チップ側パッド3、半導体チップ4、はんだボール5及びアンダーフィル材6など各部材の幾何学的寸法を用いて作成する。なお、有限要素メッシュにはダイボンディングフィルムなどはんだボールの変形に影響の少ない微薄フィルム構造部分を入れても良いが、省略してもよい。
【0033】
次に、制御部11は、電子パッケージの温度環境情報を取得する(ステップS2)。温度環境とは、例えば、非稼働時の環境温度、初期温度、稼動温度、初期温度と極端耐力温度からなる温度荷重等である。
【0034】
次に、制御部11は、アンダーフィル材6以外の各部材の物性値を取得する(ステップS3)。本実施形態では、アンダーフィル材以外の部材を、配線基板1、配線側パッド2、半導体チップ側パッド3、半導体チップ4、はんだボール5とし、これらの物性値を取得する。物性値とは、少なくとも、弾性率、ポアソン比、熱膨張係数、またはクリープ特性値であることが好ましい。
【0035】
なお、ステップS1の幾何学寸法、ステップS2の温度環境情報、ステップS3の各部材の物性値は、入力部14を介して操作者が入力してもよいし、記憶部12のデータベース12aに予め記憶させておき、制御部11が読みだして取得してもよい。
【0036】
続いて、制御部11は、ステップS1で作成した有限要素モデルにおいて、電子パッケージの複数のはんだボール5のうち、注目はんだボール5Aを決定する(ステップS4)。最大変位を有するはんだボール5と、最大応力・最大歪みを有するはんだボール5の少なくとも2つのはんだボール5を注目はんだボール5Aとして決定することが好ましい。
【0037】
ここで、決定条件について説明する。電子パッケージの中央付近又は電子パッケージの辺の中央付近、及び頂点付近に位置するか否かに基づいて、注目はんだボール5Aを決定する。決定条件を満たすはんだボール5のうち、何れのはんだボールを注目はんだボール5Aとするかは、電子パッケージの支持条件に基づいて決定され、有限要素の熱変形解析によって決定する。なお、実験データ等の経験からの類推によって決定してもよい。あるいは、解析と実験とを組み合わせて考察し決定してもよい。
【0038】
図3(A)〜(H)に示す電子パッケージの平面図を用いて注目はんだボール5Aの決定の一例を説明する。なお、半導体チップ、配線側パッド、半導体チップ側パッドは、図示を省略した。
【0039】
図3(A)〜(C)は、9×9の計81個のはんだボール5からなるいわゆるBGA(Ball Grid Array),P-BGA(Plastic-Ball Grid Array)、またはFC-BGA(Flip-Chip Ball Grid Array)方式半導体チップに対応する電子パッケージの平面図の例であり、図3(D)は、電子パッケージの外郭にはんだボール5が配置され、いわゆるQFP(Quad Flat Package)方式半導体チップに対応する電子パッケージの平面図の例である。また、図3(E)及び(F)は、9×5の計45個のはんだボール5からなるいわゆるBGA(Ball Grid Array)、P-BGA(Plastic-Ball Grid Array)方式半導体チップに対応する電子パッケージの平面図の例であり、図3(G)及び(H)は、電子パッケージの1辺と当該1辺と対向する辺にはんだボール5が配置され、いわゆるDIP(Dual In-line Package)方式の電子パッケージの平面図の例である。
【0040】
図3(A)〜(C)、(E)及び(F)の各はんだボール5は、等間隔に配置される。図3(D)及び(G)及び(H)のはんだボール5は、各行又は各列において、等間隔に配置される。なお、図3(A)〜(E)及び(G)に示す電子パッケージは、はんだボール5のグリッドに対称性があるが、図3(F)及び(H)に示す電子パッケージは、はんだボール5のグリッドに対称性がない。
【0041】
図3(A)〜(H)中、注目はんだボール5Aを黒丸、注目はんだボール以外のはんだボール5を白丸で示す。
【0042】
図3(A)は、対称性のあるBGA方式のパッケージの一例であり、A−A対角線上とB−B対角線上のはんだボールが注目はんだボール5Aとして決定された例である。電子パッケージ100Aの頂点付近のはんだボールを、最大応力・最大歪みを有する注目はんだボール5A(図中、PEと示す。)とする。また、電子パッケージ100Aの中央付近のはんだボールが最大変位を有する注目はんだボール5A(図中、PCと示す。)である。A−A対角線とB−B対角線の交点に位置するはんだボールを、最大変位を有する注目はんだボール5A(PC)とする。
【0043】
図3(B)及び図3(D)は、対称支持された基板上に実装するパッケージの一例であり、B−B線上のはんだボールが注目はんだボール5Aとして決定された例である。B−B線上のはんだボールのうち、電子パッケージ100B(又は100D)の頂点付近のはんだボールを、最大応力・最大歪みを有する注目はんだボール5A(PE)とする。また、B−B線の中央付近に位置するはんだボールを、最大変位を有する注目はんだボール5A(PC)とする。
【0044】
図3(C)は、非対称支持されたBAG方式のパッケージの一例であり、A−A対角線上とB−B線上のはんだボールが注目はんだボール5Aとして決定された例である。A−A対角線上とB−B線上のはんだボールのうち、電子パッケージ100Cの頂点付近のはんだボールを、最大応力・最大歪みを有する注目はんだボール5A(PE)とする。A−A対角線の中央付近に位置するはんだボールと、B−B線の中央付近に位置するはんだボールを、最大変位を有する注目はんだボール5A(PC)とする。
【0045】
図3(E)及び図3(F)は、非対称配置のBGA方式パッケージの一例であり、A−A対角線上のはんだボールが注目はんだボール5Aとして決定された例である。A−A対角線上のはんだボールのうち、電子パッケージ100E(又は100F)の頂点付近のはんだボールを、最大応力・最大歪みを有する注目はんだボール5A(PE)とする。また、A−A対角線の中央付近に位置するはんだボールを、最大変位を有する注目はんだボール5A(PC)とする。
【0046】
図3(G)及び図3(H)は、DIP方式パッケージの一例であり、A−A対角線上のはんだボールが注目はんだボール5Aとして決定された例である。A−A対角線上のはんだボールのうち、電子パッケージ100G(又は100H)の頂点付近のはんだボールを、最大応力・最大歪みを有する注目はんだボール5A(PE)とする。また、電子パッケージ100G(又は100H)の対向する2辺であって、はんだボール5の列と平行な辺の中心点を結ぶ線C上又は線C付近に位置するはんだボールを、注目はんだボール5A(PC)とする。
【0047】
続いて制御部11は、決定した2以上の注目はんだボール5Aに対し、有限要素モデルにおける「要素」と「節点」を特定し、はんだ接合部の変形を測定できる節点を選択する(ステップS5)。
【0048】
ところで、はんだ接合部の熱変形は「ローカル変形」と「グローバル変形」として認識されている。「ローカル変形」は,主にはんだボール自身の変形である。「グローバル変形」は電子パッケージ100全体に生じる変形である。図4(A)はローカル変形を計算する説明図であり、図4(B)はグローバル変形を計算する説明図である。有限要素の熱変形解析により、最も変形している箇所、最も変位している箇所の節点を選択する。
【0049】
ローカル変形は、注目はんだボール5A自身の変形である。有限要素の熱変形解析により特定される。図4(A)は、選択された「節点」のうち、注目はんだボール5A(PE)の四隅と注目はんだボール5A(PC)の四隅、計8つの節点(図中矢印で示す)が選択された例である。
【0050】
一方、グローバル変形は、電子パッケージ100全体に生じる変形である。有限要素の熱変形解析により特定される。図4(B)は、選択された「節点」のうち、2つの注目はんだボール5Aの半導体チップ側パッド3と配線基板側パッド2との接点であって、注目はんだボール5A(PE)の電子パッケージ100の外側の節点と、注目はんだボール5A(PC)の節点の計4つの節点(図中矢印で示す)が選択された例である。
【0051】
次に制御部11は、ステップS5において選択された節点に対し、ステップS2で取得した温度環境情報及びステップS3で取得したアンダーフィル材以外の部材の物性値を用いて、ステップS1にて作成した有限要素モデルにおける有限要素法による変形解析を行い、x,y,z自由度での節点の変位を算出する(ステップS6)。
【0052】
次に制御部11は、ステップS6で取得した変位を応答値として用いて、(1)式の目標関数F(X)に取り込む(ステップS7)。
【0053】
【数1】
なお、(1)式中、重み係数wは一般的に計算上は0.5乃至1.5のいずれかの値となる。特に1.0を用いる場合が多い。しかし、電子パッケージの支持条件や実験条件により異なる場合があるため最適化の上決定する。
【0054】
「ローカル変形」の場合、ステップS5にて選択された節点のうち、1つの注目はんだボール5Aの一つの節点と当該節点から最も遠い節点との組を「節点ペア」とする。そして、目標関数には、注目はんだボール5A自身の変形として、節点ペアのx,y,z 自由度ごとに変位の差(NDi(x,y,z)−NDj(x,y,z))の平方値を取り扱う。
【0055】
「グローバル変形」の場合、ステップS5にて選択された節点のうち、2つの注目はんだボール5Aの節点のうち、一つの節点と当該節点から最も遠い節点との組を「節点ペア」とする。目標関数には、電子パッケージ100全体に生じる変形として、節点ペアのx,y,z 自由度ごとに変位の差(NDi(x,y,z)−NDj(x,y,z))の平方値を取り扱う(ステップS7)。
【0056】
図4(A)(B)中、節点ペアを点線で囲んで示す。
【0057】
次に、制御部11は、アンダーフィル材6の物性値を最適化の変数Xとして定義する(ステップS8)。アンダーフィル材の「熱膨張係数及びヤング率及びポアソン比」、「熱膨張係数及びヤング率及び横弾性率」、又は、「ヤング率及びポワソン比」、又は、「ヤング率及び横弾性率」のいずれかの組を最適化の変数として定義する。物性値(変数)の上限と下限を設定してもよい。また、繰り返し演算する際のインクリメント値も定義する。これら物性値、物性値の上限下限、及びインクリメント値は入力部14を介して操作者が入力してもよいし、記憶部12に予め記憶させておき、制御部11が読みだして取得してもよい。
【0058】
続いて、制御部11は、ステップS8で定義した最適化の変数Xを、ステップS7で定義した目標関数F(X)に関連付ける(ステップS9)。
【0059】
そして、制御部11は、目標関数F(X)を算出する(ステップS10)。なお、有限要素法の定式化は複雑であるため、一次或いは二次の多項式を用いて近似計算を行う。
【0060】
注目はんだボール5Aの応答変位を目標関数とする試行関数Fを組み立て、変数Xの関数として(2)式のように2次多項式を用いて近似で表すことができる。
F(X)=a0+a1X+a2X2 ・・・(2)
【0061】
変数Xに対し,初期値のX0を与え、注目はんだボール5Aの節点の変位応答F0を得ているとき、第一回の試行解析によって、目標関数として(1)式から勾配F0′及び係数a0、a1、a2を(3)式〜(5)式により求めることができる。
F0=a0+a1X0+a2X02 ・・・(3)
F0′=a1+2a2X0 ・・・(4)
F1=a0+a1X1+a2X12 ・・・(5)
【0062】
一方、相対応答変位を目標関数とする試行関数Fを組み立て、変数Xの関数として(6)式のように1次多項式を用いて近似で表すこともできる。
F(X)=a0+a1X ・・・(6)
【0063】
変数Xに対し、初期値のX0を与え、注目はんだボール5Aの節点の変位応答F0を得ているとき、第一回の試行解析によって、目標関数として(1)式から勾配F0′ 及び係数a0、a1を(7)式〜(9)式により求めることができる。
F0=a0+a1X0 ・・・(7)
F0′=a1 ・・・(8)
F1=a0+a1X1 ・・・(9)
【0064】
このように、(2)乃至(5)式、又は(6)乃至(9)式にて得られた変数X1を有限要素のモデルに用いて、同じ手順で次のX2、X3・・・を求める。繰り返し解析により、F(X)が最小値に収束する変数Xを求める。F(X)が最小値に収束する変数Xがアンダーフィル材6の最適物性値となる。
【0065】
制御部11は、(2)乃至(5)式、又は(6)乃至(9)式にて算出された変数Xをアンダーフィル材6の最適物性値として表示部13のモニタ等に提示し(ステップS11)、処理を終了する。
【0066】
(実験例)
本発明によるアンダーフィル材選択支援装置10を用いて、最適なアンダーフィル材6の物性値を求めた。
【0067】
図5(A)は、実験で用いた電子パッケージの概略図である。直列14ピンのはんだボールを有する電子パッケージを想定した。また、稼働温度は90度、初期温度を25度と想定した。
【0068】
図5(A)に示す電子パッケージが対称であると想定し、電子パッケージは両端を固定支持されているものと想定した。アンダーフィル材選択支援装置10により有限要素モデルを作成する。図5(B)は、作成された有限要素モデルである。
【0069】
次に、アンダーフィル材選択支援装置10は、有限要素の熱変形解析を行った。解析結果から得られたはんだボールの変形を示す応力コンター図を図6に示す。図6において左側が電子パッケージの左端であり、右側が電子パッケージの中央(対称面)である。
【0070】
解析結果から、電子パッケージの最左端のはんだボールを、最大応力または最大歪みを有する注目はんだボール5A(PE)として選択し、電子パッケージの中央のはんだボールを最大変位を有する注目はんだボール5A(PC)として選択した。さらに、注目はんだボール5A(PE)及び5A(PC)に対して、有限要素モデルにおける複数の節点の中から、はんだ接合部の変形を計算できる節点を選択した。
【0071】
図7(A)は、注目はんだボール5A(PE)の節点を示す図であり、図7(B)は、注目はんだボール5A(PC)の節点を示す図である。注目はんだボール5A(PE)及び5A(PC)に対して、合計10個の節点を選択した。
【0072】
選択された10個の節点について、ND2とND6、ND4とND5、ND9とND8、ND10とND7の節点のX,Y,Z 方向での変位の差をローカル変形として目標関数F(X)に取り込む。なお、重み係数wを1とする。
【0073】
また、節点ND2とND8、ND4とND7に対し、X,Y,Z 方向での変位の差をはんだボールのグローバル変形として目標関数F(X)に取り込む。なお、重み係数wを1とする。
【0074】
さらに、算出対象となるアンダーフィル材の物性値(ヤング率、ポアソン比及び熱膨張係数等)の初期値を目標関数F(X)に取り込む。各初期値は以下の通りである。
(初期値)
ヤング率:11GPa
ポアソン比:0.33
熱膨張係数:42ppm
【0075】
アンダーフィル材選択支援装置10により、目標関数F(X)が最小値に収束する変数Xを最適なアンダーフィル物性値として得た。
(最適アンダーフィル物性値)
ヤング率:12.8GPa
ポアソン比:0.3
熱膨張係数:40ppm
【0076】
上記最適物性値を有するアンダーフィル材を用いた電子パッケージと、最適物性値を有しないアンダーフィル材を用いた電子パッケージについて、それぞれはんだボールの応力、歪み及びクリープ歪みを比較した。なお、以下の説明において、最適物性値を有しないアンダーフィル材を用いた電子パッケージを「最適化前のアンダーフィル」とし、最適物性値を有するアンダーフィル材を用いた電子パッケージを「最適化後のアンダーフィル」として説明する。
【0077】
図8(A)は、軸方向(z軸)の応力・歪みのヒステリシスループを示し、図8(B)は、最大せん断応力・最大せん断歪みを示す。三角形プロットによる破線が、最適化前のアンダーフィルのデータであり、丸形プロットの実線が、最適化後のアンダーフィルのデータである。
【0078】
図9は、最適化前のアンダーフィルを適用した電子パッケージのはんだボールの応力と歪みを示すグラフであり、図10は、最適化後のアンダーフィルを適用した電子パッケージのはんだボールの応力と歪みを示すグラフである。なお、図9及び図10において、PEボールは注目はんだボール5A(PE)のデータであり、PCボールは注目はんだボール5B(PC)のデータである。
【0079】
図9(A)及び図10(A)は、最大主応力を示すグラフであり、図9(B)及び図10(B)は、最大せん断歪みを示すグラフであり、図9(C)及び図10(C)は、クリープ歪みを示すグラフであり、
【0080】
これらのグラフを考査すると、最適化後のアンダーフィル材を用いることにより、最大応力、最大せん断歪みに関しては2倍以上改良され、クリープ歪みに関しては3倍程度改良される結果を得た。
【0081】
以上のように、本実施形態のアンダーフィル材選択支援装置10によれば、電子パッケージ100を構成するアンダーフィル材以外の各部材の寸法に基づいて、有限要素モデルを作成し、有限要素モデルにおいて複数のはんだボール5から、最大変位又は最大応力又は最大歪みを有する注目はんだボール5Aを決定する。そして、当該注目はんだボール5Aの複数の節点から一部の節点を選択し、電子パッケージ100の温度環境情報とアンダーフィル材以外の各部材の物性値に基づいて、節点の変位を算出し、算出された2つの節点の変位の差(NDi(x,y,z)−NDj(x,y,z))に基づいて(1)式に示す目標関数F(X)が最小値に収束する変数Xをアンダーフィル材の最適物性値として提示する。これにより、実験等の手間なく、効率よく、信頼性の高い電子パッケージを実現可能なアンダーフィル材6の選択ができる。適正なアンダーフィル物性値を得ることにより、はんだ接合部の変形を防止し、はんだ接合部の応力歪みの低減を実現できる。
【0082】
また、電子パッケージ100の中央付近又は電子パッケージ100の辺の中央付近のはんだボール5と、電子パッケージ100の頂点付近のはんだボール5を、注目はんだボール5Aとして決定することにより、「ローカル変形」と「グローバル変形」を的確に解析することができる。
【0083】
さらに、注目はんだボール5Aの節点のうち、一つの節点と当該節点から最も遠い節点の変位の差に基づいて、(1)式の目標関数F(X)が最小値に収束する変数Xをアンダーフィル材の最適物性値とすれば、ローカル変形及びグローバル変形に対して耐性の高い電子パッケージを実現可能なアンダーフィル材6の物性値を得ることができる。
【0084】
なお、本発明による目標関数F(X)の算出手法は、(2)式又は(6)式に基づく近似計算に限定されるものではない。例えば、変数Xに対し正則化の手法を用いて処理すれば、級数または、三角級数による近似計算により目標関数F(X)を算出してもよい。
【0085】
(応用例)
また、既存のアンダーフィル材から適正なアンダーフィルを選択する場合、アンダーフィル材選択支援装置10の記憶部12に、複数のアンダーフィル材6の情報を登録する。アンダーフィル材6の物性値を提示する際、記憶部12を参照して、算出されたアンダーフィル材6の物性値に近いアンダーフィル材6の情報を、表示部13のモニタに提示するよう構成してもよい。
【0086】
図11(A)は、記憶部12に記憶された複数のアンダーフィル材6の情報の一例である。図11(A)に示す例では、物性値(ヤング率、ポアソン比、熱膨張係数)が製品名・型番に対応付けて登録されている。
【0087】
制御部11は、上記ステップS11でアンダーフィル材6の物性値を提示する際、記憶部12を参照して、算出されたアンダーフィル材6の物性値に近い(または算出された物性値が製品の物性値の範囲に適合する)アンダーフィル材6の情報と共に提示する。図11(B)は、モニタ表示例である。
【0088】
この構成により、アンダーフィル材選択支援装置10の操作者であるはんだ接合部の構造設計者、電子機材の製造者、研究者等は、最適なアンダーフィル材の情報を一目で把握することができる。また、図11(B)に示すように、印刷ボタンを設けた。入力部14を介して操作者が当該印刷ボタンを選択することにより、算出されたアンダーフィル材6の物性値と、当該物性値に近いアンダーフィル材6の情報を印刷することもできる。
【0089】
本発明の適用範囲は上記実施形態に限定されることはない。本発明は、信頼性の高い電子パッケージを実現可能なアンダーフィル材の物性値の算出等に対し、広く適用することができる。
【符号の説明】
【0090】
10 アンダーフィル材選択支援装置
11 制御部
12 記憶部
12a データベース
13 表示部
14 入力部
15 通信部
100、100A、100B、100C、100D、100E、100F、100G、100H 電子パッケージ
1 配線基板
2 配線基板側パッド
3 半導体チップ側パッド
4 半導体チップ
5 はんだボール
5A 注目はんだボール
6 アンダーフィル材
【特許請求の範囲】
【請求項1】
電子パッケージのはんだ接合用のアンダーフィル材を選択するためのアンダーフィル材選択支援装置であって、
前記電子パッケージを構成するアンダーフィル材以外の各部材の寸法に基づいて、前記電子パッケージの有限要素モデルを作成する作成手段と、
前記有限要素モデルにおいて、前記電子パッケージを構成する複数のはんだボールのうち、2以上のはんだボールを、最大変位又は最大応力又は最大歪みを有する注目はんだボールとして決定する決定手段と、
前記有限要素モデルにおいて、前記注目はんだボールの複数の節点から一部の節点を選択し、前記電子パッケージの温度環境情報と前記各部材の物性値に基づいて、選択された前記節点の変位を算出する変位算出手段と、
前記アンダーフィル材の物性値を最適化の変数Xとして定義する最適化変数定義手段と、
前記変位算出手段によって算出された2つの前記節点の変位の差(NDi(x,y,z)−NDj(x,y,z))に基づいて、(1)式に示す目標関数F(X)の値を算出する目標関数算出手段と、
前記目標関数算出手段が算出する目標関数F(X)値が最小値に収束する変数Xを前記アンダーフィル材の最適物性値として提示する提示手段と、
を有することを特徴とする電子パッケージのはんだ接合用アンダーフィル材選択支援装置。
【数1】
【請求項2】
前記決定手段は、前記電子パッケージの中央付近又は前記電子パッケージの辺の中央付近のはんだボールと、前記電子パッケージの頂点付近のはんだボールを前記注目はんだボールとして決定することを特徴とする請求項1に記載の電子パッケージのはんだ接合用アンダーフィル材選択支援装置。
【請求項3】
前記目標関数算出手段は、一の前記注目はんだボールの節点のうち、一つの節点と当該節点から最も遠い節点の変位の差に基づいて、(1)式に示す目標関数F(X)の値を算出することを特徴とする請求項1又は請求項2に記載の電子パッケージのはんだ接合用アンダーフィル材選択支援装置。
【請求項4】
前記目標関数算出手段は、一の前記注目はんだボールと他の前記注目はんだボールの節点のうち、一つの節点と当該節点から最も遠い節点の変位の差に基づいて、(1)式に示す目標関数F(X)の値を算出することを特徴とする請求項1又は請求項2に記載の電子パッケージのはんだ接合用アンダーフィル材選択支援装置。
【請求項5】
前記最適化変数定義手段は、前記アンダーフィル材の物性値として、熱膨張係数及びヤング率及びポアソン比、熱膨張係数及びヤング率及び横弾性率、又は、ヤング率及びポワソン比、又は、ヤング率及び横弾性率のいずれかの組を最適化の変数Xとして定義することを特徴とする請求項1乃至請求項4のいずれか一項に記載の電子パッケージのはんだ接合用アンダーフィル材選択支援装置。
【請求項6】
前記目標関数算出手段は、前記(1)式に基づく近似多項式である(2)式又は(6)式に基づいて、最適化の変数Xを近似計算により求めることを特徴とする請求項1乃至請求項5のいずれか一項に記載の電子パッケージのはんだ接合用アンダーフィル材選択支援装置。
F(X)=a0+a1X+a2X2 ・・・(2)
F(X)=a0+a1X ・・・(6)
(a0、a1、a2は係数)
【請求項7】
コンピュータを、請求項1乃至請求項6のいずれか一項に記載の電子パッケージのはんだ接合用アンダーフィル材選択支援装置として機能させることを特徴とする電子パッケージのはんだ接合用アンダーフィル材選択支援プログラム。
【請求項8】
電子パッケージのはんだ接合用のアンダーフィル材の最適物性値を算出する方法であって、
前記電子パッケージを構成するアンダーフィル材以外の各部材の寸法に基づいて、前記電子パッケージの有限要素モデルを作成するステップと、
前記有限要素モデルにおいて、前記電子パッケージを構成する複数のはんだボールのうち、2以上のはんだボールを、最大変位又は最大応力又は最大歪みを有する注目はんだボールとして決定する決定ステップと、
前記有限要素モデルにおいて、前記注目はんだボールの複数の節点から一部の節点を選択し、前記電子パッケージの温度環境情報と前記各部材の物性値に基づいて、選択された前記節点の変位を算出するステップと、
前記アンダーフィル材の物性値を最適化の変数Xとして定義する最適化変数定義ステップと、
算出された2つの前記節点の変位の差(NDi(x,y,z)−NDj(x,y,z))に基づいて、(1)式に示す目標関数F(X)の値を算出する目標関数算出ステップと、
前記目標関数算出ステップにて算出される目標関数F(X)値が最小値に収束する変数Xを前記アンダーフィル材の最適物性値として提示するステップと、
を有することを特徴とする電子パッケージのはんだ接合用アンダーフィル材の最適物性値算出方法。
【数1】
【請求項9】
前記決定ステップは、前記電子パッケージの中央付近又は前記電子パッケージの辺の中央付近のはんだボールと、前記電子パッケージの頂点付近のはんだボールを前記注目はんだボールとして決定することを特徴とする請求項7に記載の電子パッケージのはんだ接合用アンダーフィル材の最適物性値算出方法。
【請求項10】
前記目標関数算出ステップは、一の前記注目はんだボールの節点のうち、一つの節点と当該節点から最も遠い節点の変位の差に基づいて、(1)式に示す目標関数F(X)の値を算出することを特徴とする請求項8又は請求項9に記載の電子パッケージのはんだ接合用アンダーフィル材の最適物性値算出方法。
【請求項11】
前記目標関数算出ステップは、一の前記注目はんだボールと他の前記注目はんだボールの節点のうち、一つの節点と当該節点から最も遠い節点の変位の差に基づいて、(1)式に示す目標関数F(X)の値を算出することを特徴とする請求項8又は請求項9に記載の電子パッケージのはんだ接合用アンダーフィル材の最適物性値算出方法。
【請求項12】
前記最適化変数定義ステップは、前記アンダーフィル材の物性値として、熱膨張係数及びヤング率及びポアソン比、熱膨張係数及びヤング率及び横弾性率、又は、ヤング率及びポワソン比、又は、ヤング率及び横弾性率のいずれかの組を最適化の変数Xとして定義することを特徴とする請求項8乃至請求項11のいずれか一項に記載の電子パッケージのはんだ接合用アンダーフィル材の最適物性値算出方法。
【請求項13】
前記目標関数算出ステップは、前記(1)式に基づく近似多項式である(2)式又は(6)式に基づいて、最適化の変数Xを近似計算により求めることを特徴とする請求項8乃至請求項12のいずれか一項に記載の電子パッケージのはんだ接合用アンダーフィル材の最適物性値算出方法。
F(X)=a0+a1X+a2X2 ・・・(2)
F(X)=a0+a1X ・・・(6)
(a0、a1、a2は係数)
【請求項1】
電子パッケージのはんだ接合用のアンダーフィル材を選択するためのアンダーフィル材選択支援装置であって、
前記電子パッケージを構成するアンダーフィル材以外の各部材の寸法に基づいて、前記電子パッケージの有限要素モデルを作成する作成手段と、
前記有限要素モデルにおいて、前記電子パッケージを構成する複数のはんだボールのうち、2以上のはんだボールを、最大変位又は最大応力又は最大歪みを有する注目はんだボールとして決定する決定手段と、
前記有限要素モデルにおいて、前記注目はんだボールの複数の節点から一部の節点を選択し、前記電子パッケージの温度環境情報と前記各部材の物性値に基づいて、選択された前記節点の変位を算出する変位算出手段と、
前記アンダーフィル材の物性値を最適化の変数Xとして定義する最適化変数定義手段と、
前記変位算出手段によって算出された2つの前記節点の変位の差(NDi(x,y,z)−NDj(x,y,z))に基づいて、(1)式に示す目標関数F(X)の値を算出する目標関数算出手段と、
前記目標関数算出手段が算出する目標関数F(X)値が最小値に収束する変数Xを前記アンダーフィル材の最適物性値として提示する提示手段と、
を有することを特徴とする電子パッケージのはんだ接合用アンダーフィル材選択支援装置。
【数1】
【請求項2】
前記決定手段は、前記電子パッケージの中央付近又は前記電子パッケージの辺の中央付近のはんだボールと、前記電子パッケージの頂点付近のはんだボールを前記注目はんだボールとして決定することを特徴とする請求項1に記載の電子パッケージのはんだ接合用アンダーフィル材選択支援装置。
【請求項3】
前記目標関数算出手段は、一の前記注目はんだボールの節点のうち、一つの節点と当該節点から最も遠い節点の変位の差に基づいて、(1)式に示す目標関数F(X)の値を算出することを特徴とする請求項1又は請求項2に記載の電子パッケージのはんだ接合用アンダーフィル材選択支援装置。
【請求項4】
前記目標関数算出手段は、一の前記注目はんだボールと他の前記注目はんだボールの節点のうち、一つの節点と当該節点から最も遠い節点の変位の差に基づいて、(1)式に示す目標関数F(X)の値を算出することを特徴とする請求項1又は請求項2に記載の電子パッケージのはんだ接合用アンダーフィル材選択支援装置。
【請求項5】
前記最適化変数定義手段は、前記アンダーフィル材の物性値として、熱膨張係数及びヤング率及びポアソン比、熱膨張係数及びヤング率及び横弾性率、又は、ヤング率及びポワソン比、又は、ヤング率及び横弾性率のいずれかの組を最適化の変数Xとして定義することを特徴とする請求項1乃至請求項4のいずれか一項に記載の電子パッケージのはんだ接合用アンダーフィル材選択支援装置。
【請求項6】
前記目標関数算出手段は、前記(1)式に基づく近似多項式である(2)式又は(6)式に基づいて、最適化の変数Xを近似計算により求めることを特徴とする請求項1乃至請求項5のいずれか一項に記載の電子パッケージのはんだ接合用アンダーフィル材選択支援装置。
F(X)=a0+a1X+a2X2 ・・・(2)
F(X)=a0+a1X ・・・(6)
(a0、a1、a2は係数)
【請求項7】
コンピュータを、請求項1乃至請求項6のいずれか一項に記載の電子パッケージのはんだ接合用アンダーフィル材選択支援装置として機能させることを特徴とする電子パッケージのはんだ接合用アンダーフィル材選択支援プログラム。
【請求項8】
電子パッケージのはんだ接合用のアンダーフィル材の最適物性値を算出する方法であって、
前記電子パッケージを構成するアンダーフィル材以外の各部材の寸法に基づいて、前記電子パッケージの有限要素モデルを作成するステップと、
前記有限要素モデルにおいて、前記電子パッケージを構成する複数のはんだボールのうち、2以上のはんだボールを、最大変位又は最大応力又は最大歪みを有する注目はんだボールとして決定する決定ステップと、
前記有限要素モデルにおいて、前記注目はんだボールの複数の節点から一部の節点を選択し、前記電子パッケージの温度環境情報と前記各部材の物性値に基づいて、選択された前記節点の変位を算出するステップと、
前記アンダーフィル材の物性値を最適化の変数Xとして定義する最適化変数定義ステップと、
算出された2つの前記節点の変位の差(NDi(x,y,z)−NDj(x,y,z))に基づいて、(1)式に示す目標関数F(X)の値を算出する目標関数算出ステップと、
前記目標関数算出ステップにて算出される目標関数F(X)値が最小値に収束する変数Xを前記アンダーフィル材の最適物性値として提示するステップと、
を有することを特徴とする電子パッケージのはんだ接合用アンダーフィル材の最適物性値算出方法。
【数1】
【請求項9】
前記決定ステップは、前記電子パッケージの中央付近又は前記電子パッケージの辺の中央付近のはんだボールと、前記電子パッケージの頂点付近のはんだボールを前記注目はんだボールとして決定することを特徴とする請求項7に記載の電子パッケージのはんだ接合用アンダーフィル材の最適物性値算出方法。
【請求項10】
前記目標関数算出ステップは、一の前記注目はんだボールの節点のうち、一つの節点と当該節点から最も遠い節点の変位の差に基づいて、(1)式に示す目標関数F(X)の値を算出することを特徴とする請求項8又は請求項9に記載の電子パッケージのはんだ接合用アンダーフィル材の最適物性値算出方法。
【請求項11】
前記目標関数算出ステップは、一の前記注目はんだボールと他の前記注目はんだボールの節点のうち、一つの節点と当該節点から最も遠い節点の変位の差に基づいて、(1)式に示す目標関数F(X)の値を算出することを特徴とする請求項8又は請求項9に記載の電子パッケージのはんだ接合用アンダーフィル材の最適物性値算出方法。
【請求項12】
前記最適化変数定義ステップは、前記アンダーフィル材の物性値として、熱膨張係数及びヤング率及びポアソン比、熱膨張係数及びヤング率及び横弾性率、又は、ヤング率及びポワソン比、又は、ヤング率及び横弾性率のいずれかの組を最適化の変数Xとして定義することを特徴とする請求項8乃至請求項11のいずれか一項に記載の電子パッケージのはんだ接合用アンダーフィル材の最適物性値算出方法。
【請求項13】
前記目標関数算出ステップは、前記(1)式に基づく近似多項式である(2)式又は(6)式に基づいて、最適化の変数Xを近似計算により求めることを特徴とする請求項8乃至請求項12のいずれか一項に記載の電子パッケージのはんだ接合用アンダーフィル材の最適物性値算出方法。
F(X)=a0+a1X+a2X2 ・・・(2)
F(X)=a0+a1X ・・・(6)
(a0、a1、a2は係数)
【図1】

【図2】
【図3】
【図4】
【図11】
【図5】
【図6】
【図7】
【図8】

【図9】
【図10】
【図2】
【図3】
【図4】
【図11】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2012−33610(P2012−33610A)
【公開日】平成24年2月16日(2012.2.16)
【国際特許分類】
【出願番号】特願2010−170512(P2010−170512)
【出願日】平成22年7月29日(2010.7.29)
【出願人】(510208354)エヌ・エス・ティ株式会社 (1)
【Fターム(参考)】
【公開日】平成24年2月16日(2012.2.16)
【国際特許分類】
【出願日】平成22年7月29日(2010.7.29)
【出願人】(510208354)エヌ・エス・ティ株式会社 (1)
【Fターム(参考)】
[ Back to top ]