
電子ビームの調整方法,荷電粒子光学系制御装置、及び走査電子顕微鏡
【課題】本発明の目的は、異なる帯電が混在するが故に、正確な検査,測定が困難になる可能性がある点に鑑み、異なる帯電現象が含まれていたとしても、高精度な検査,測定を可能ならしめる方法、及び装置の提供にある。
【解決手段】上記目的を達成するための一態様として、帯電条件の変化を示すフィッティング関数に基づいて、荷電粒子線照射によって得られるパターン寸法を補正する方法、及び装置を提案する。このような構成によれば、特性の異なる帯電現象が混在するような場合であっても、走査荷電粒子線装置による正確な検査,測定を行うことが可能となる。
【解決手段】上記目的を達成するための一態様として、帯電条件の変化を示すフィッティング関数に基づいて、荷電粒子線照射によって得られるパターン寸法を補正する方法、及び装置を提案する。このような構成によれば、特性の異なる帯電現象が混在するような場合であっても、走査荷電粒子線装置による正確な検査,測定を行うことが可能となる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は荷電粒子線装置に係り、特に試料上に形成されたパターンの寸法や形状を測定或いは検査する装置を用いた測定方法、及び装置に関する。
【背景技術】
【0002】
近年、半導体素子の高集積化および微細化に伴い、ウェハ上に多種多様なパターンが形成され、その形状や寸法の評価,測定が益々重要となっている。多数の測定点を自動的にかつ高速に処理するためには、測定点の検出を如何に高速に実行できるかが重要であり、そのためには測定点に移動した際にパターン上にフォーカスが合っており、更に所望の観察倍率が設定されていることが必須である。
【0003】
荷電粒子光学系において、ウェハ上へのフォーカス条件は荷電粒子源の加速電圧,ウェハに印加される電圧,ウェハの高さから決定される。例えば特許文献1には、レーザー光をウェハに照射し、その反射光を利用してウェハの高さを検出し、得られた高さ情報を荷電粒子光学系の制御装置の一つである対物レンズ制御系にフィードバックし、測定点への移動が終了すると同時に必要な励磁を対物レンズに印加する方法がとられている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開平11−126573号公報
【特許文献2】特開平7−176285号公報
【特許文献3】特開2001−52642号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかし、近年になって接地しても残留する固定的な帯電をもつウェハが散見されるようになった。この固定的帯電の原因は例えばスピンコーターによるレジスト塗布時の摩擦でレジスト内部での有極性物質が分極し電位が固定するのであるとか、プラズマを使用したエッチング処理による帯電であると言われている。
【0006】
このような試料上に残る帯電は、荷電粒子線のフォーカスずれを招き、更には倍率の変動や荷電粒子線装置による測定の誤差要因にもなっていた。フォーカスずれの問題を解決するために、例えば特許文献2に開示されているように、走査電子顕微鏡の測定点ごとにフォーカスのオフセット値を記憶させ、フォーカスずれによって自動測定が妨げられないような方法がある。また、特許文献3に記載されているように、真空内で試料に近接した場所に複数個の電位計を設置し、その測定結果に基づいた値をリターディング電圧にフィードバックする方法などが考案されている。
【0007】
しかしながら特許文献2に開示の技術には以下の問題がある。ウェハの帯電電圧はその製造過程における温度や湿度,レジストの状態,プラズマ強度に左右されるため、同一の製造過程を経ていても一定ではない。したがって、自動測定用のファイルにフォーカスずれを記憶させてもウェハ毎に更新する必要がある。したがって、ウェハの測定に要する時間が長くなり生産性が低下する。また、ウェハの帯電電位はそのままであるので、実際に使用したい加速電圧と実際の加速電圧が異なるため、形成される二次荷電粒子像に現れる微細な構造やコントラストが異なる、あるいは倍率の制御に誤差が発生するなどの問題は解決されない。
【0008】
また、特許文献3に開示されているように、真空内に設置された電位計を用いる場合、測定点に移動しないとその電位を測定することができないため、一点あたりの測定に要する時間が長くなる、また故障したときには真空容器である荷電粒子光学系およびステージを一旦大気に開放する必要がありメンテナンス性が悪い、また複数個使用する電位計が常に同一の出力をするように調整する必要があるなどの問題がある。
【0009】
本発明の主たる目的の1つは、異なる帯電が混在するが故に、正確な検査,測定が困難になる可能性がある点に鑑み、異なる帯電現象が含まれていたとしても、高精度な検査,測定を可能ならしめる方法、及び装置の提供にある。
【課題を解決するための手段】
【0010】
上記目的を達成するための一態様として、帯電条件の変化を示すフィッティング関数に基づいて、荷電粒子線照射によって得られるパターン寸法を補正する方法、及び装置を提案する。
【発明の効果】
【0011】
上記一態様によれば、特性の異なる帯電現象が混在するような場合であっても、走査荷電粒子線装置による正確な検査,測定を行うことが可能となる。
【図面の簡単な説明】
【0012】
【図1】走査電子顕微鏡の全体構成を表す図である。
【図2】搬送経路におけるウェハと搬送アームと静電電位計との位置関係を示す図である。
【図3】ウェハ面上の帯電分布関数の決定方法についてのフローを示す図である。
【図4】複数個のプローブでウェハの帯電電圧を測定する方法を示す図である。
【図5】静電電位計とエネルギーフィルタを備えたSEMの全構成図である。
【図6】試料高さ計測手段とエネルギーフィルタを備えたSEMの全構成図である。
【図7】エネルギーフィルタの詳細構成図である。
【図8】帯電補正制御部の詳細構成図である。
【図9】対物レンズの光学倍率を説明する図である。
【図10】試料の帯電のメカニズムを説明する図である。
【図11】帯電電圧が倍率を変動されるメカニズムを説明する図である。
【図12】大域帯電電圧と倍率変動感度係数を関係付けるグラフである。
【図13】局所帯電電圧と倍率変動感度係数を関係付けるグラフである。
【図14】照射電子線の照射領域と局所帯電の関係を示すグラフである。
【図15】照射電子線の倍率と倍率変動感度係数の関係を示すグラフである。
【図16】プリドーズ倍率と、実測測長値および推定測長値の関係を示すグラフである。
【図17】局所帯電補正部のブロック図である。
【図18】2以上の帯電測定に基づく局所帯電補正を行う手順を示したフローチャートである。
【図19】プリドーズ倍率による電子線照射を行った際の帯電状況を説明する図である。
【図20】他の局所帯電補正部のブロック図である。
【図21】記憶部に補正データがある場合の局所帯電補正の手順を示すフローチャートである。
【図22】局所帯電補正により推定された測長値の誤差確認画面を示す図である。
【図23】複数の具体例を複合した手順を示すフローチャートである。
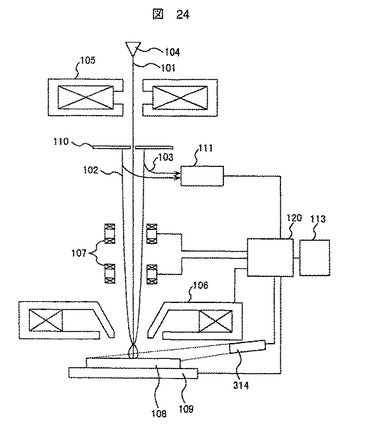
【図24】紫外線照射装置を備えたSEMの全体構成図を説明する図である。
【発明を実施するための形態】
【0013】
(実施例1)
以下、図面を用いて本発明の実施形態について述べる。なお、本実施例においては走査電子顕微鏡(Scanning Electron Microscope:SEM)を例にとって説明するが、これに限られることはなく、他のイオンビーム照射装置等の他の荷電粒子線装置にも適用が可能である。また、本実施例は、荷電粒子の1つである二次電子、及び/又は反射電子を検出する例を説明するが、これに限られることはなく、例えば二次イオン等、他の荷電粒子を検出するようにしても良い。
【0014】
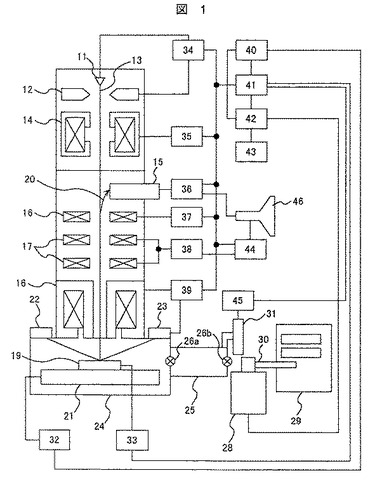
図1は本発明の全体構成を示したものである。全体制御部42はユーザーインターフェース43からオペレータによって入力された荷電粒子の加速電圧,ウェハ情報,観察位置情報などを基に、荷電粒子光学系制御装置41,ステージ制御装置40,ウェハ搬送装置28を介して、装置全体の制御を行っている。
【0015】
全体制御部からの命令を受けたウェハ搬送装置28はウェハカセット29から搬送アーム30によりウェハを取り出し、真空に保持されている試料交換室25と大気である外部とを分離するゲートバルブ26bを開けウェハを試料交換室に導入する。試料交換室に入ったウェハはゲートバルブ26aを介して試料室24に送られ、試料ステージ21上に固定される。
【0016】
荷電粒子光学系制御装置41は全体制御部42からの命令に従い高電圧制御装置34,リターディング制御部33,コンデンサレンズ制御部35,増幅器36,アライメント制御部37,偏向信号制御部44,対物レンズ制御部39を制御している。引出電極12により荷電粒子源11から引き出された一次荷電粒子線13はコンデンサレンズ14,対物レンズ18により収束されウェハ19上に照射される。途中荷電粒子線はアライメントコイル16によりその軌道を調整され、また、偏向信号増幅器38を介して偏向信号制御部から信号を受けた偏向コイル17によりウェハ上を二次元的に走査される。なお、以下の説明では荷電粒子線の光学条件を変更するための信号を各光学素子に送り、必要な演算を行う構成を制御部,制御装置、或いは制御プロセッサ等と呼ぶこともある。
【0017】
ウェハにはリターディング制御部33から荷電粒子線を減速するためのリターディング電圧(電子顕微鏡の場合は負電圧)が印加されている。上記ウェハ19への一次荷電粒子線13の照射に起因して、ウェハから放出される二次荷電粒子20は二次荷電粒子検出器15により捕捉され、増幅器を介して二次荷電粒子像表示装置46の輝度信号として使用される。また二次荷電粒子像表示装置の偏向信号と、偏向コイルの偏向信号とは同期しているため、二次荷電粒子像表示装置上にはウェハ上のパターン形状が忠実に再現される。
【0018】
ウェハ上のパターンを高速に検査,観察するためには試料ステージが所望の観察点に移動したときのウェハ高さを検出し、その高さに応じた対物レンズのフォーカスをあわせることが必要である。そのため、光を用いたウェハ高さ検出機能が設けられている。試料ステージ位置検出部32により試料ステージ位置を検出し、所定の位置近傍に試料ステージが接近した時点から高さ検出用レーザー発光器22がウェハに向けて光を照射し、その反射光をポジションセンサ23で受光し、その受光位置からウェハの高さを検出する。そして検出された高さに応じたフォーカス量が対物レンズにフィードバックされる。その結果、試料ステージが所定の位置に到達した際にはすでにフォーカスが設定されており、オペレータによる操作なしにパターンの検出を自動で行うことができる。
【0019】
ウェハが帯電していない場合、フォーカスに必要な対物レンズの励磁電流は一般的に式(1)に示すような関数で表される。
【0020】
Iobj=F(Vo,Vr,Z) (1)
ここで、Iobjは、ウェハが帯電していないときの対物レンズの励磁電流、Fは、対物レンズの励磁電流を計算する関数、Voは荷電粒子源の電圧、Vrはウェハの電位(ウェハに印加されるリターディング電圧)、Zはウェハの高さである。関数Fは電子光学シミュレーションあるいは実測により導出することができる。通常帯電していないウェハの電位はウェハに印加されたリターディング電圧と同電位で式(1)に示す関係が成り立つため、所定のフォーカス制御が可能である。ところがウェハ自身が帯電している場合に必要な対物レンズの励磁電流は式(2)に示すような値となり、帯電していない場合と帯電している場合ではフォーカス電流が異なる。
【0021】
Iobj′=F(Vo,Vg′,Z) (2)
そのためいくら高さを正確に検出できても、フォーカスが合わないために二次荷電粒子像がぼやけ観察点の検出に失敗し自動での測定が不可能となる。Iobj′はウェハが帯電しているときの対物レンズの励磁電流、Vg′はリターディング電圧Vrとウェハ帯電電圧ΔVgの合計電圧Vg=Vr+ΔVgである。
【0022】
これらウェハの帯電はレジストや下地の材質などにより異なるが、多くの場合は同心円状に帯電している。本発明は、このように同心円状に帯電したウェハの帯電量を測定し、その電位をフィードバックするものである。ウェハカセット内に格納されたウェハを搬送アーム30(搬送機構)が取り出し、試料交換室内に搬送する途中にプローブ31により測定する。その測定値は静電電位計45を介して荷電粒子光学系制御装置に伝達される。
【0023】
なお、本実施例では、試料上の電位を測定するプローブが、搬送機構によって搬送される試料移動軌道の上であって、試料から離間した位置に配置される例について説明するがこれに限られることはない。例えば試料室と予備排気室との間で試料を受け渡しするための機構や、外部から予備排気室へ試料を導入する機構による搬送軌道上にプローブを配置するようにしても良い。
【0024】
上記説明にあるように、ウェハは同心円状に帯電する傾向にあるので、ウェハ面上の中心位置を含む直線状に電位分布を計測すれば、おおよそ試料全体の電位分布が把握できることによる。以下の説明は、このような電位分布を示す半導体ウェハのような試料を測定する走査電子顕微鏡に特に有効な実施例を示すものである。
【0025】
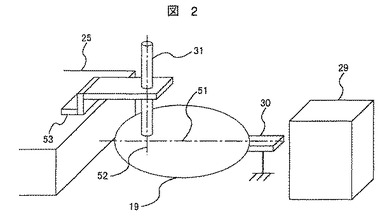
図2は、ウェハカセットと試料搬入機構の一要素である搬送アームとウェハと静電電位計と試料交換室の関係を示したものである。ウェハはウェハカセット29から搬送アーム30によって取り出され、試料交換室25内へと搬送される。静電電位計のプローブ31はウェハの搬送経路上で、かつその中心線52がウェハの中心線51とウェハ上で一致するように固定台53により固定されている。静電電位計のプローブはウェハと接地されている搬送アームの両方の電位を測定することになるので、搬送アームの接地電位をもとにウェハ電位を校正できるのでより正確な測定値となる。またウェハの通過位置は常に一定であり、プローブも固定台により固定されているためこれら2つの位置関係が変わらないため常に安定した測定が行える。また、プローブが真空外にあるため、プローブが故障した場合でもその修理や交換が容易な構造となっている。
【0026】
この様に本実施例では取り扱いの容易性を考慮して、真空外にプローブを配置しているが、これに限られることなくウェハが通過する道程のいずこかに配置しておいても良い。また、本実施例ではプローブの中心と、ウェハの中心線が一致するようにウェハを移動させているが、これに限られることはない。上記説明にあるように、ウェハの帯電は同心円状に帯電することが多い。この帯電の分布が、ウェハの中心を最高点としてウェハの縁にいくに従って、帯電量が低くなるような、いわゆる山なりに形成されるような場合、プローブの中心がウェハの中心から若干ずれていたとしても、電位分布のおおよその把握ができるので、ウェハ中心からずれた線状の電位分布から、全体の電位分布を把握しても良い。
【0027】
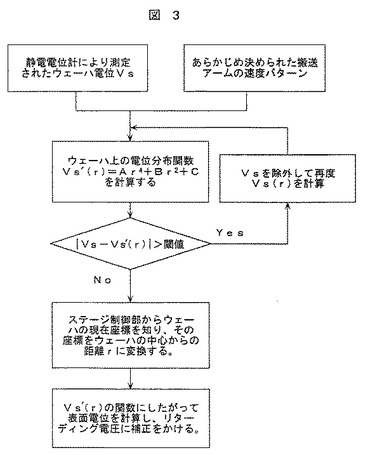
図3は表面電位の測定から帯電電圧をウェハ面上の分布関数として表現し、リターディングにフィードバックするための手順を示したものである。一般的にウェハの搬送アームは一定速度では運動していないので電位測定の周期は時間的には一定であってもウェハ上の座標は一定間隔ではない。そこで搬送アームの速度パターンから電位測定時のウェハ上の座標を計算すれば正確な座標に対応した電位が得られる。この得られたデータをもとに電位の分布関数を作る。まず、得られたすべてのデータを使用して偶関数(図3では4次関数)で近似式を作成する。
【0028】
次に各測定点において近似式との差分を計算する。電位の測定値には誤差が含まれており、この差分値が設定された閾値より大きいものは測定値の誤差が大きいものとして除外する。除外されたデータを除き再度近似式を作成する。この手順を何度か繰り返し、最終的にすべての値の差分が閾値よりも小さくなれば終了する。ここで作られた関数はウェハの中心からの距離に対する電位の関数である。
【0029】
この関数と、ステージ制御装置から得られたステージ座標から補正すべき電位が計算され、図1に示したリターディング制御部を介して補正電位がウェハに供給される。データの取得は観察するウェハが試料交換室に送られるたびに行われ、そのウェハの観察が終わり、元のウェハカセットに戻すための命令が発生するまで有効である。
【0030】
以上が本発明実施例の説明である。本発明実施例では測定されたウェハの帯電電位をそのままリターディング電圧にフィードバックする方法を示したが、帯電電位を対物レンズの励磁電流に変換してフィードバックしてもよい。ただしこの場合はリターディング電圧とウェハの帯電電位を足して荷電粒子源の電位を上回らないことが必要である。たとえば荷電粒子源の電圧が−2000Vであり、試料に照射する荷電粒子の電位を−300Vにしたい場合、ウェハにかかるリターディング電圧は−1700Vであることが必要である。
【0031】
この条件で最大−290V帯電しているウェハを観察する場合を考えると、リターディングに−290Vを補正する電位を印加しても、あるいはその電位を励磁電流に換算して対物レンズに印加しても一次荷電粒子線は試料に到達することができる。しかし、最大−310V帯電しているウェハではリターディング電圧と帯電電圧を足すと−2010Vとなり荷電粒子源の電位を上回る。
【0032】
この場合、一次荷電粒子線は試料に到達することができず反射されてしまう。この場合にはリターディング電圧に−310Vを補正するための電圧310Vを印加しなければならない。また測定された電位はリターディング電圧ではなく荷電粒子源の電位にフィードバックしてもよい。更に本発明実施例では、フィードバックの対象を、インダクタンスが大きく高速制御が難しい磁界レンズではなく、リターディング電圧としているが、対物レンズを静電レンズとするか、或いは磁界レンズの他に静電レンズを設けて、これら静電レンズに、帯電電位に基づいて得られるフォーカス補正値をフィードバックするようにしても良い。
【0033】
また、他にも対物レンズ内に正電圧を印加した筒状電極を配置するいわゆるブースティング法を用いたSEMの場合、印加される正電圧を調整することによって、フォーカスを調整するようにしても良い。更に他にも電子線のフォーカスを調整する技術全般の適用が可能である。
【0034】
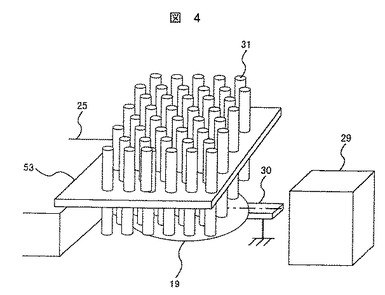
今回の発明では静電電位計のプローブがウェハの中心と一致するように一つ置く場合について述べたが、複数個のプローブを設置してもよい。図4は複数個のプローブをウェハの搬送経路に並べてウェハ面全体の測定を行う場合の構成図の一つである。プローブ31は固定台の上に複数個マトリクス状に並べられている。この場合、ウェハ19は搬送中に所定の位置で一旦停止しそれぞれの場所の帯電を測定する。搬送アームは停止しているので速度と座標との関係を考える必要がない、あるいは帯電が軸対称分布をしていない場合でも分布関数を作ることができるなどのメリットがある。また、全自動で半導体のパターン幅や欠陥を検査する走査電子顕微鏡は、予め測定個所が決まっているので、その測定個所、或いはその近傍の帯電量を選択的に検知しておき、フィードバックをかけるようにしても良い。
【0035】
なお本実施例においては、単なる帯電量に基づくフィードバックだけではなく、他の情報も重畳してリターディング電圧のフィードバック値を求めるようにしても良い。また、何等かの原因で静電電位計に不具合が発生した場合、リターディング電圧へのフィードバックを行うと、逆にフォーカス値がずれる可能性があるので、フォーカスを評価する手段を他に設けておき、フォーカス評価値が異常を示す場合に、静電電位計の故障診断を行ったり、帯電電位測定に基づくフォーカスのフィードバック処理を中止したり、オペレータに異常がある旨を警告するような手段を設けておいても良い。
【0036】
以上説明したように、本発明によってこれまで帯電しているためにフォーカスずれが発生し、自動測定時のパターン検出の成功率が低下していたウェハでもその帯電電位を補正することができるようになるので、帯電していないウェハと同様に自動測定が可能となる。またウェハ毎に帯電電圧を測定するので、測定用ファイルに依存せずまた帯電の有無やその大きさによるファイルの修正を必要としないなどのメリットがある。
【0037】
(実施例2)
以下に示す実施例は、試料(半導体ウェハ等)に異なる帯電現象が混在するが故に、正確な検査,測定が困難であるという点に鑑み、異なる帯電現象が含まれていたとしても、高精度な検査,測定を可能ならしめる方法、及び装置に関するものである。
【0038】
荷電粒子線装置では、前述したように、荷電粒子線の走査と同期して二次荷電粒子検出器の出力情報が像表示装置に再現される。試料上の2点間距離aに対するブラウン管(像表示装置)上の走査像の2点間距離Aの比が観察倍率MSEMである。
【0039】
MSEM=A/a (3)
通常、ブラウン管上の画面の大きさは固定であるから、試料上の2点間距離aは観察倍率MSEMに反比例する。従って、ブラウン管上の走査像の2点間距離Aを計測し、観察倍率MSEMで除することにより、試料上の配線寸法等a=A/MSEMを導出できる。
【0040】
近年、半導体産業の微細化が進んだことから、SEMが光学顕微鏡に代わって、半導体素子製作のプロセスまたはプロセス完成後の検査(例えば電子ビームによる寸法測定や電気的動作の検査)に使われるようになった。絶縁物が使われている半導体産業の試料(ウェハ)では、一次電子ビームの照射により絶縁物の帯電が時間的に変動し、走査像が劣化する。
【0041】
この問題を避ける代表的な技術として特開平5−151927号公報に記載のSEMでは、観察時の倍率とは異なる倍率で一次電子ビームを照射し、積極的に試料表面を帯電させるプリドーズ方式を備えている。続いて、特開平9−171791号記載のリターディング方式及びブースティング方式が開発され、試料に印加するリターディング電圧を調整し、絶縁物が正に帯電する1kV以下の低加速電圧の一次電子ビームで観察することにより、再現性のある安定した表面帯電が生成できるようになり、かつ3nm程度の高分解能が実現できた。
【0042】
その後、特開2000−200579号公報記載のSEMのように、通常観察時の一次電子ビームとは異なるエネルギーの電子ビームを予め照射し、より積極的に表面帯電を生成する方式が開発された。これらの方式により、安定した高い表面帯電電圧が容易に生成でき、アスペクト比の高いコンタクトホール底面部の残膜や帯電電圧の差異に基づく電位コントラストの観察が可能となった。
【0043】
しかし、前記の表面帯電電圧の条件で観察した場合、表面帯電を増加させるに従って寸法測定値が数%程度変動することが判明した。この寸法測定値変動量は、より微細化した製造プロセスにおいて、許容限界に達している。この不具合の原因は、表面帯電に伴って観察倍率MSEMが変動しているためである。
【0044】
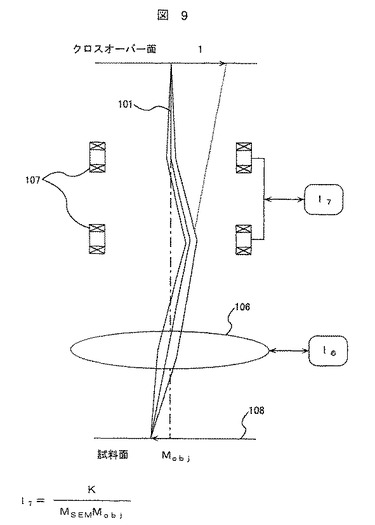
図9は走査偏向器,対物レンズと試料からなる電子光学系において、観察倍率MSEMと対物レンズ106の光学倍率Mobjに対する走査偏向器107のコイル電流I7の関連を示している。クロスオーバー面の一点から放射状に出射された一次電子ビーム101はウェハ108面上の一点に集束する。走査偏向器107を使って、仮想的な一次電子の出射点が中心軸から1だけ離れるようにすると、試料面ではMobjだけ離れる。走査偏向器107の換算係数およびコイル電流をそれぞれ、KおよびI7とすると試料上の2点間距離aは次式で計算できる。
【0045】
a=KMobjI7 (4)
また、ブラウン管の換算係数をLとすると、ブラウン管上の走査像の2点間距離Aは次式となる。
【0046】
A=LI7 (5)
ここで、光学倍率がMobjからMobj′に変動した場合を考えると、試料上の2点間距離aを走査するための電流はI7からI7′に変化し、ブラウン管上の走査像の2点間距離はAからA′に変化する。
【0047】
a=KMobjI7′ (6)
A′=LI7′ (7)
結局、観察倍率はMSEMからMSEM′に変動する。
【0048】
MSEM′=(Mobj/Mobj′)MSEM (8)
次式を用いれば、観察倍率が変動しても、正しく寸法測定できる。
【0049】
a=A′/MSEM′ (9)
結局、高精度の寸法測定のためには、帯電の有無に依らず光学倍率MobjとMobj′が精度良く計算できれば良い。
【0050】
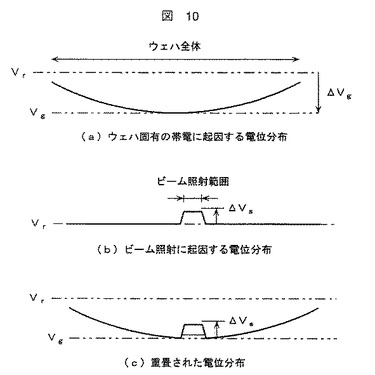
図10はウェハにおける表面帯電の原理を説明している。ウェハ基板にはリターディング電圧Vrが印加されている。ウェハはスピンコーターによるレジスト塗布時の摩擦や、プラズマを使用したエッチング処理のため、SEMで観察する以前から(a)の固有な帯電をしている場合がある。(a)の帯電電圧はウェハの全面に渡っており、大域帯電電圧ΔVgと呼ぶことにする。観察点付近での大域帯電電位はVg=Vr+ΔVgである。大域帯電電位Vgでの光学倍率Mobjは式(1)同様な次式で表せる。
【0051】
Mobj=M(Vo,Vg,Z) (10)
この関数Mについても、電子光学シミュレーションあるいは実測により導出することができる。一方、電子ビーム照射による帯電電圧ΔVsは(b)のように局所的であり、局所帯電電圧と呼ぶことにする。両者の帯電が重畳した場合(c)の局所電位はVs=Vg+ΔVsである。
【0052】
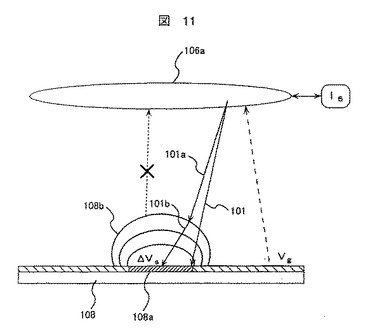
図11は試料の大域帯電電位Vgおよび局所帯電電圧ΔVsが対物レンズの光学倍率Mobjを変動させるメカニズムを説明している。大域帯電電位Vgは対物レンズ106a内の電位を変化させるため、静電レンズが試料上に形成され、フォーカスがずれることになり、そのフォーカスを合わせると、励磁電流I6の顕著な変化として現れる。I6が変化し、さらに試料への入射エネルギーも変動するので、軌道1aのように集束し、光学倍率Mobjが変動する。しかし、逆にI6の変動量からVgを推測できる。
【0053】
一方、電子ビーム照射による帯電電圧ΔVsは局所的であるため、励磁電流I6への影響がほとんど無い。それにもかかわらず、局所帯電電圧ΔVsは微小な静電レンズ108bを形成するため、一次電子101を軌道101bのように集束させ光学倍率Mobjを大きく変動させる。以上のような事実から、大域帯電はフォーカスに大きな影響を与え、局所帯電は倍率に大きな影響を与えることが確認できた。
【0054】
以上のように、全く特性の異なる2つの帯電現象が含まれ、それぞれの帯電が、倍率やフォーカスに与える影響の程度が異なるため、これらを分離せずに補正を試みても、精度の高い補正が実現できなかった。
【0055】
このような課題を解決するためには、大域帯電電圧ΔVgおよび局所帯電電圧ΔVsを分離して計測、あるいは推定する手段を設け、これらのデータに基づいて正しい光学倍率Mobjを計算する手段が実現できればよい。
【0056】
この倍率補正量に基づいて走査偏向器の偏向強度を補正することにより指定観察倍率の二次元走査像を正確に表示することができるが、半導体プロセスの寸法測定においては、測長値そのものに倍率補正する簡便化が実用的である。
【0057】
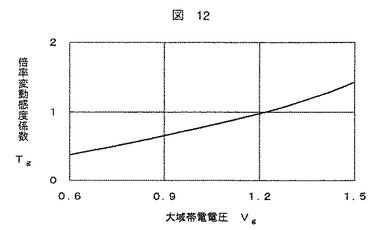
図12および図13を用いて上記した本発明の作用を示す。
【0058】
図12はリターディング電位Vr=−1.2kVにおいて、大域帯電位Vgが−0.6kVから−1.5kVの範囲で変動した場合の倍率変動感度係数Tgを示している。TgとΔVgから倍率変動量ΔMg=(Mobj′−Mobj)が次式で計算できる。
【0059】
ΔMg/Mobj=Tg*ΔVg (11)
ここで、Tgは帯電前の観察条件および大域帯電電位Vgによって変動するため、観察条件毎に図8のグラフを予め実験あるいは計算により記憶させておくことが必要となる。あるいは、式(11)を用いずに大域帯電電位Vgから直接、倍率MobjあるいはMobj′を求めても問題ない。
【0060】
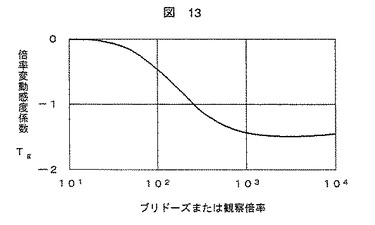
一方、図13はリターディング電位Vr=−1.2kVにおいて、ビーム照射面積を変動した場合の倍率変動感度係数Tsを示している。TsとΔVsから倍率変動量ΔMs=(Mobj′−Mobj)が次式で計算できる。
【0061】
ΔMs/Mobj=Ts*ΔVs/Vacc (12)
ここで、Tsは帯電前の観察条件およびビーム照射面積によって変動するが、式(12)が示すように倍率補正量ΔMsと局所帯電電位ΔVsとはよい比例関係にある。また、Tsはビーム照射面積(即ち、照射倍率)に応じて4つの区間に分けることができる。50倍より低倍率では大域帯電と見なせる。50倍から500倍の区間では大域帯電から局所帯電への遷移領域にある。500倍から5000倍の区間ではほぼ一定値と見なせる。5000倍より高倍率では徐々にTsが減少する傾向にある。従って、倍率変動感度係数Tsがほぼ一定値と見なせる500倍から5000倍の区間を含むように、照射面積の一辺を10μmから300μmにすれば、補正値の推定精度を保持したまま、予め記憶しておくデータ数を削減できるので好都合である。
【0062】
図5に、本実施例におけるSEMの第1の具体例を示す。陰極104から引き出された一次電子ビーム101はコンデンサレンズ105で絞られ、さらに走査偏向器107によってウェハ108上を二次元走査される。一次電子ビーム101は、試料ステージ109を介してウェハ108に印加した負のリターディング電圧のため、対物レンズ106とウェハ108間の減速電界で減速され、かつ対物レンズ106のレンズ作用でウェハ108上に細く絞られる。
【0063】
一次電子ビーム101がウェハ108を照射すると二次電子102が発生する。対物レンズ106とウェハ108間に作られている電界は、発生した二次電子102に対しては加速電界として作用するため、対物レンズ106の電子ビーム通過孔内に吸引され、対物レンズ106の磁界でレンズ作用を受けながら上昇する。上昇した二次電子102は変換電極110に高エネルギーで衝突し、新たな二次電子103を発生する。この二次電子103は正の約10kVの高電圧を印加したシンチレータ111に吸引され、シンチレータ111に衝突した際、光を発生する。図示していないが、この光をライトガイドで光電子増倍管に導き、電気信号に変換し、増幅した後、この出力でブラウン管の輝度変調を行う。
【0064】
なお、図5の説明は制御プロセッサ部が走査電子顕微鏡と一体、或いはそれに準ずるものとして説明したが、無論それに限られることはなく、走査電子顕微鏡鏡体とは別に設けられた制御プロセッサで以下に説明するような処理を行っても良い。その際には二次電子検出器で検出される検出信号を制御プロセッサに伝達したり、制御プロセッサから走査電子顕微鏡のレンズや偏向器等に信号を伝達する伝達媒体と、当該伝達媒体経由で伝達される信号を入出力する入出力端子が必要となる。また、以下に説明する処理を行うプログラムを記憶媒体に登録しておき、画像メモリを有し走査電子顕微鏡に必要な信号を供給する手段を備えた制御プロセッサで、当該プログラムを実行するようにしても良い。
【0065】
本実施例装置では、大域帯電電圧ΔVgの計測手段(電位分布計測装置)として、例えば実施例1で説明したような静電電位計を備える。ウェハの大域帯電電圧は同心円状なので、ウェハ面上の中心位置を含む直線状に電位分布を計測すれば、おおよそ試料全体の電位分布が把握できることができる。従って、具体的には、実施例1に記載のように、ウェハ180の搬送経路上に静電電位計プローブ114を固定し、搬送アーム181の移動を利用して直線状に測定する方法が適当である。測定データを用いて、大域帯電電圧ΔVgをウェハ中心からの距離rの関数として表現し、測定点が移動するごとにリターディング電位Vrをフィードバックし、一次電子ビーム101がウェハ108に入射する電圧が常に一定値Vacc=Vo+Vgとなるようにする。ここで、Voは陰極104の電圧に相当する。
【0066】
さらに、本実施例では、局所帯電電圧ΔVsの計測手段(電位計測装置)として二次電子のエネルギーフィルタを備える。例えば、変換電極110の下にメッシュ電極112を設置し、大域帯電電位Vgを基点としてメッシュ電極112の印加電圧を走引し、二次電子の信号量変化(いわゆるSカーブ)を計測する。表面が導電性の試料で測定したSカーブと実試料の観察点でのSカーブを比較し、シフト電圧を局所帯電電圧ΔVsとする。
【0067】
帯電補正制御部120は上述した大域帯電電位Vgの測定、局所帯電電圧ΔVsを得るまでのSカーブ測定シーケンスを実行する。さらに、求めたVg,ΔVs、および対物レンズ106の励磁電流等に基づいて倍率補正量を計算し、走査偏向器107の偏向強度を補正する。
【0068】
本実施例では、大域帯電に比べて局所帯電の方が倍率に与える影響が大きいことに鑑み、特定箇所の帯電量(局所帯電量)から大域帯電量に相当する値を差し引いた値に基づいて、倍率補正を行う。単なるエネルギーフィルタによる帯電量測定では、局所帯電と大域帯電(少なくとも走査領域より大きな領域の帯電、例えば倍率50倍の観察領域より大きな領域)が複合された状態で検出されてしまうため、本実施例ではエネルギーフィルタで計測された帯電量から、静電電位計114で計測された電子線の走査箇所における帯電量を差し引くことで、大域帯電によらない真の電子線照射に基づく局所帯電量を計測することが可能になる。
【0069】
また、本実施例装置では、上記演算式で得られた倍率変動量ΔMsに基づいて、走査偏向器の偏向範囲を調整することもできるし、計測された測長値を補正することも可能としている。
【0070】
走査偏向器の偏向範囲を調整する場合には、電磁式の走査偏向器の場合、倍率変動量ΔMsを補正するに必要な電流を、もとの偏向電流に加算或いは減算すると良い。また、測長値へのフィードバックについては、既知の走査電子顕微鏡等に採用されている測長法によって得られた測長値に、倍率変動比を乗除算することで、正確な測長値を算出することができる。なお、本実施例は大域帯電と局所帯電を分離して計測することを要旨とするものであり、上記走査偏向器の調整法や測長値の補正法は特に上述するものに限られない。
【0071】
図6は本実施例の第2の具体例である。この具体例では、先の具体例の静電電位計に代えて、試料高さを計測する手段を追加した。例えば、所定の観察点近傍に試料ステージ109が接近した時点から高さ検出用レーザー発光器115がウェハ108に向けてレーザー光116を照射し、その反射光をポジションセンサ117で受光し、その受光位置からウェハの高さを検出する、いわゆるZセンサを備える。ジャストフォーカスとなる対物レンズの励磁電流と試料高さのデータから、大域帯電電位Vgが一意に決まるので、予めこれら3つの物理量の関係を実験、あるいは電子光学シミュレーションによって計算しておけば、直接電位を測定しなくても大域帯電電位Vgが推測できる。
【0072】
本実施例では、帯電補正制御部120は上述した大域帯電電位Vgを推測するまでのZセンサによる試料高さ計測,局所帯電電圧ΔVsを得るまでのSカーブ測定シーケンスを実行する。さらに、先の具体例と同様に、求めたVg,ΔVs、および対物レンズ106の励磁電流等に基づいて倍率補正量を計算し、走査偏向器107の偏向強度、或いは得られた測長値を補正する。
【0073】
次に実施例の更なる具体例を説明する。これは以上の2つの具体例で述べた静電電位計と試料高さを計測する手段の両方を備えたSEMである。両手段を備えることにより、大域帯電電位Vgと局所帯電電圧ΔVsをより高精度に、安定して計測できる。
【0074】
即ち、静電電位計プローブ114の測定データ、あるいはフィッティングされた関数によって第一近似値Vg(1)を求め、Zセンサからの試料高さデータを加味してジャストフォーカスとなる対物レンズの励磁電流を推定しておけば、ジャストフォーカスの探索(いわゆるオートフォーカス)を短時間に完了することができる。Vg(1)から計算した対物レンズの励磁電流とオートフォーカスで求まった励磁電流の差から、正確な大域帯電電位Vgを計算することができる。Vgが正確であれば、局所表面電位Vsとの差であるΔVs=Vs−Vgは正確に計算でき、倍率補正精度も向上する。
【0075】
図7は上述した実施例が備えるエネルギーフィルタをより詳細に説明している。二次電子変換電極110の下に、接地されたメッシュ電極113で上下に挟まれたメッシュ電極112を設置し、大域帯電電位Vgあるいは第一近似値Vg(1)を初期値としてメッシュ電極112の印加電圧を走引し、Sカーブ(エネルギーフィルタへの印加電圧を変化させたときの二次電子量分布)を計測する。接地されたメッシュ電極113はメッシュ電極112の電界が変換電極110等への不要な広がりを防止する。また、下側のメッシュ電極113にはメッシュ電極112の電圧に依らず、一定量の二次電子102が衝突し、一定量の新たな二次電子130が生成される。この二次電子130は正の約10kVの高電圧を印加したシンチレータ131に吸引される。シンチレータ111からの電流I11をシンチレータ131からの電流I31で規格化することで、Sカーブを高精度に計測できる。シンチレータ111の場合と同様にブラウン管に像表示も可能である。
【0076】
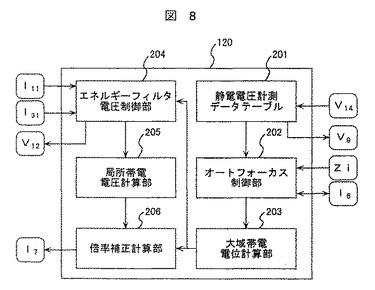
図8は、特に上述した3つ目の具体例の帯電補正制御部120を詳細に説明している。帯電補正制御部120は、静電電圧計測データテーブル201,オートフォーカス制御部202,大域帯電電位計算部203,Sカーブを自動計測するエネルギーフィルタ電圧制御部204,局所帯電電圧計算部205および倍率補正計算部206から成る。
【0077】
まず、静電電圧計測データテーブル201には静電電圧計で測定した試料の座標に対する電圧V14のデータ、あるいはフィッティングされた関数形を記憶しておく。観察点が移動する毎に対応する大域帯電電圧ΔVgを計算し、所望の加速電圧Vacc=Vo+ΔVg+Vrを満足するように試料ステージ109へのリターディング電圧V9(=Vr)を調整する。オートフォーカス制御部202はZセンサからの試料高さデータZiと設定した加速電圧Vaccに対する励磁電流I6(1)を計算し、この電流の近傍を走引することで、ジャストフォーカスする励磁電流I6を探索する。続いて、大域帯電電位計算部203はI6(1)とI6に差が有る場合に加速電圧Vaccに誤差があると考え、ΔVgを修正し、正確な大域帯電電位Vgを求める。
【0078】
一方、エネルギーフィルタ電圧制御部204は帯電のない状態でのSカーブを計測し、局所帯電電圧計算部205に記憶しておく。Sカーブの計測シーケンスは上述したように、大域帯電電位Vgあるいはその推定値Vg(1)を基点としてメッシュ電極112の印加電圧V12を走引し、二次電子の電流I11の変化を計測する。シンチレータ31からの電流I31で規格化することもできる。記憶しておくデータとしては、Sカーブそのもの、あるいは閾値を超えるフィルタ電圧,Sカーブの傾斜が最大となるフィルタ電圧等の処理済みのデータでも良い。試料の材質に依存してSカーブが若干異なるので、材質毎にデータを記憶することで、以後の計算精度を高めることができる。局所帯電電圧計算部205は基準となるSカーブを選択し、電圧のシフト量から局所帯電電圧ΔVsを計算する。最後に、倍率補正計算部206は大域帯電電位Vgと局所帯電電圧ΔVsから、それぞれの式(1)および(2)を用いて倍率補正量ΔMg,ΔMsを計算し、総合的な倍率M+ΔMg+ΔMsの逆数で走査偏向器の電流I7を補正することで、帯電電圧に依らずに常に所望の倍率で像観察ができる。
【0079】
半導体素子製作ラインで大量のウェハを自動処理する場合には、エネルギーフィルタによるSカーブ測定回数を減らして、処理速度を上げることが有効である。同一回路バターン,同一材料においては局所帯電電圧ΔVsは同一となるので、測定済みのΔVsを流用することができる。場合によっては、ウェハ毎に一回のSカーブ測定で済ませることも可能である。新規にSカーブを測定した場合には局所帯電電圧計算部205のデータベースに自動的に追加される。
【0080】
本実施例によれば、絶縁物試料の像観察,寸法測定において、観察倍率の変動量が高精度に計算でき、所望の観察倍率に固定、或いは倍率変動によって変化する測長値を補正することも可能である。これによって、超微細化された半導体素子製作のプロセスにおいて、高精度の寸法管理が可能となる。
【0081】
また、付加的効果として、試料に入射する一次電子ビームのエネルギーを高精度に制御可能であることから安定した画質がえられる。さらに、局所帯電電圧ΔVsをモニターしておくことにより、過大な帯電による絶縁破壊の防止,アスペクトの大きなコンタクトホール底面観察が可能な帯電電圧が得られているかの指標とすることができる。
【0082】
(実施例3)
図11を用いて説明したように、局所帯電電圧ΔVsは、対物レンズの光学倍率Mobjを変動させる。電子ビーム照射による帯電電圧ΔVsは局所的であるため、励磁電流I6への影響がほとんど無い。それにもかかわらず、局所帯電電圧ΔVsは微小な静電レンズ108bを形成するため、グローバル帯電(大域帯電)によって偏向された一次電子の軌道101aを軌道101bのように集束させ光学倍率Mobjを大きく変動させることは、先の実施例で説明した通りである。
【0083】
このように、異なる帯電現象が複合しているために、困難となっている正確な検査,測定を行うための更なる手法を以下に説明する。
【0084】
本実施例では、局所帯電電圧ΔVsによる倍率変動の補正を行い、正しい光学倍率Mobjを計算する手法を提案する。
【0085】
局所帯電によって引き起こされる倍率変動は、局所帯電電圧ΔVsに依存し、局所帯電電圧ΔVsは、電子線の照射倍率(本実施例では、検査,計測のための電子線照射の前に、本実施例で説明するような電子線照射を行うことを主に説明するため、以下プリドーズ倍率とする)Mpreと試料表面近くの電場と試料の種類に依存する。
【0086】
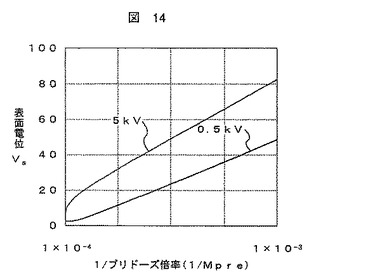
図14にブースティング電圧0.5kVと5kVにおいて、プリドーズ倍率Mpreを変動させた場合の局所帯電電圧ΔVsを示す。ここで言うブースティングとは、対物レンズ内を電子線が高加速で通過できるように少なくとも対物レンズ内に正電圧が印加された円筒電極を配置する手法である。図14は、円筒電極に印加する電圧を0.5kVとした場合と、5kVとした場合に、プリドーズ倍率を変化させたときの表面電位を計測した結果である。ブースティング技術は例えば特開平9−171791号(USP5,872,358)に詳細に記載されている。
【0087】
局所帯電電圧ΔVsを変動させるパラメータを、試料表面電場とプリドーズ倍率とした時、ブースティング電圧Vb,リターディング電圧Vr,フィッティング係数A1およびa1、プリドーズ倍率Mpreから局所帯電電圧ΔVsは次のフィッティング関数で計算できる。
【0088】
ΔVs=A1(Vb−Vr)/Mpre+a1 (13)
また、倍率感度係数Tsを用いることによりΔVsから倍率変動量ΔM/Mobjを次式で計算できる。
【0089】
ΔM/Mobj=Ts*ΔVs (14)
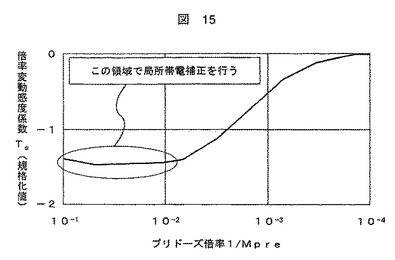
図15にリターディング電位Vr=−1.2kVにおいて、ビームの照射面積(∝1/プリドーズ倍率=1/Mpre)を変動した場合の倍率変動感度係数Tsを示す。Tsはビーム照射面積に応じて4つの区間に分けることができる。50倍より低倍率ではグローバル帯電と見なせる。
【0090】
50倍から500倍までの区間はグローバル帯電から局所帯電への遷移領域にある。500倍から5000倍の区間ではほぼ一定と見なせる。5000倍より高倍率では徐々にTsが減少する傾向にある。従って、照射領域を倍率変動感度係数Tsが一定値と見なせる500倍から5000倍の倍率に相当する照射領域(一辺が10μmから300μm)に設定すれば、補正値の推定精度を保持したまま、予め記憶しておくデータ数を削減できる。
【0091】
パターンの寸法の真値と実測値をそれぞれL,Lexとすると、倍率変動量B=ΔM/Mobjは次式で計算できる。
【0092】
L/Lex=1+B (15)
式(13),式(14),式(15)を用いて、真の測長値を推定する場合、未知の係数はA1及びa1である。そのためプリドーズ倍率Mpreもしくは試料表面の電場に比例する(Vb−Vr)を変えて二度以上測定した結果を用いれば、真の測長値Lを推定することができる。
【0093】
上記の方法は、未知の絶縁体試料を観察する場合において、プリドーズ倍率Mpreもしくは試料表面の電場等を変化させて、二つ以上の異なる局所帯電電圧ΔVsで観測することにより真の測長値を推定できるという利点も持つ。また上記の方法を用いる際に、局所帯電電圧ΔVsを、式(13)に示したようなプリドーズ倍率や表面電場を帯電可変パラメータとして持つフィッティング関数ではなく入射ビームのエネルギーや照射時間及び試料内の電子及びホールの移動度等も帯電可変パラメータとして持つ別のフィッティング関数で表しても同様な効果を得ることができる。
【0094】
また、式(13)に用いられたフィッティング係数a1及びA1を記憶部に記憶しておくことにより、1つのプリドーズ倍率と表面電界における測長値を用いて真の寸法値を推定することができる。一方、式(13)に用いられたフィッティング係数a1はプリドーズ倍率や、表面電場に左右されない項である。そのため、同じ種類の試料の測長値を補正する際に用いられたa1のばらつきを式(13),式(14),式(15)に代入することによって補正に用いられたフィッティングパラメータの信頼性を測長値の偏差として評価することができる。
【0095】
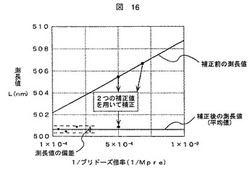
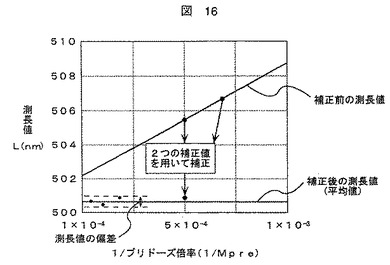
図16にプリドーズ倍率に対する補正前の測長値と補正後の測長値の関係を表すグラフを示す。式(15)に従って、真の寸法値と補正前の測長値の関係から計算したプリドーズ倍率毎の倍率変動量Bを記憶しておくことにより、1つの観察条件における測長値から真の寸法値を推測することができる。
【0096】
またプリドーズを行う際に、特開2000−200579号公報に示されている最適加速電圧を用いることにより高コントラストの画像を得ることができ、より高精度の観測結果を得ることができる。
【0097】
本実施例の第1の具体例では、真の寸法値の推定手段として、局所帯電電圧を可変する帯電可変パラメータを変化させ計測した複数個の測長値を用いることにより真の寸法値を推定する機能を、図5や図6の帯電補正制御部120に持たせた例について説明する。
【0098】
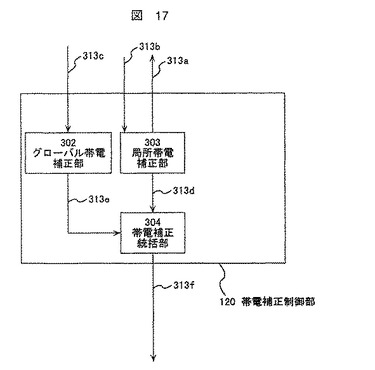
図17に帯電補正制御部120の模式図を示す。帯電補正制御部120には大きくグローバル帯電補正部302と局所帯電補正部303から構成される。局所帯電補正部303は313aを介して測定条件(帯電可変パラメータ,加速電圧,プリドーズ時の一次電子照射時間)を設定する。
【0099】
設定した条件において計測した測長値を、入力装置(図示せず)から局所帯電補正部303に、313bを経由して入力する。入力された測長値と設定した測定条件から、局所帯電補正を行う倍率変動量Bを、313dを通し帯電補正統括部304に入力する。またグローバル帯電補正部302で計算された倍率変動量も313eを通り帯電補正統括部304に入力する。
【0100】
帯電補正統括部304で入力された局所帯電補正部303及びグローバル帯電補正部302のそれぞれの補正部で導出された倍率変動量からグローバル帯電と局所帯電の影響によって変動した測長値の補正を行った寸法値を出力する。
【0101】
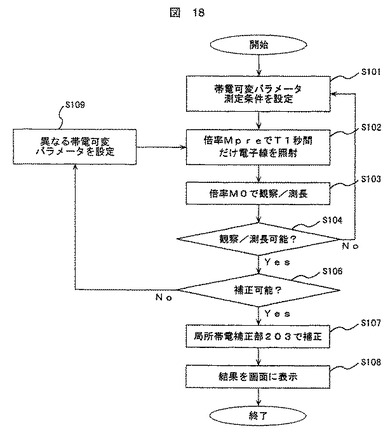
図18に測長値を補正する場合のフローチャートを示す。まず、ステップs101で帯電可変パラメータ及び測定条件を設定する。ステップs102で、ステップs101で定めた条件に従い試料に電子ビームを照射し試料を帯電させる。ステップs103で、ステップs101、もしくはステップs109で定めた帯電可変パラメータの下で計測した測長値Lexを得る。ステップs104で、ステップs103で取得した測長値Lexから、十分な精度で測長が行えたか判断する。十分な精度で測長が行えていないと判断した場合、ステップs101で観察条件を設定しなおす。
【0102】
ステップs106でステップs107での補正に必要な複数回のデータがそろっているかを判別し、データが不足している場合はステップs109で異なる帯電可変パラメータを設定しもう一度測長する。ステップs107でステップs105において計測した測長値とステップs102及びステップs109で定めた帯電可変パラメータを用いて、測長値を補正する。ステップ108で補正した測長値をモニターに出力する。
【0103】
本実施例を用いて局所帯電補正を行えば、予備測定を行ったことのない試料の形状および材質についても異なる局所帯電電圧で二回以上測定することにより、真の寸法値を高精度に推測することができる。また、倍率毎のエネルギーフィルタを用いた予備測定が不要となるので、測定速度の向上にも効果がある。
【0104】
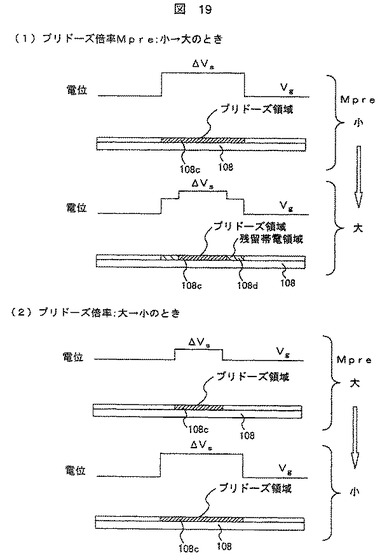
図19にプリドーズ倍率を変え試料に帯電させた時の試料帯電の模式図を示す。二つ以上の異なるプリドーズ倍率を用いそれぞれの倍率で測長する場合、次に示す手順を用いることにより、早く安定した局所帯電を作り出すことができる。
【0105】
試料108は、表面全体に広がるグローバル帯電電位Vgと電子照射によって引き起こされる局所帯電電圧ΔVsの二種類の帯電をしている。図19(1)においてプリドーズ倍率の小さい状態で観測した後にプリドーズ倍率を上げて観測するとき、残留帯電領域108dができる。この残留帯電領域の帯電が十分緩和するまでの緩和時間をとらなければ局所帯電補正に悪影響を及ぼす。しかし、図19(2)のようにプリドーズ倍率が大きい状態で観測した後にプリドーズ倍率を下げて観測を行えば、残留帯電領域が存在しないため、緩和時間は必要なくプリドーズ終了後すぐに測定に入れる。上記の手順を用いることで、精度の良い帯電領域の下で早く観測を行うことができる。
【0106】
続いて本発明実施例の第2の具体例を図20及び図21を用いて説明する。本実施例では帯電補正部120内に組み込まれている記憶部301に倍率変動量Bもしくは局所帯電電圧ΔVsを表す関数のフィッティング定数のデータベースを備える。局所帯電補正部303から313aを経由して測定条件(帯電可変パラメータ,加速電圧,プリドーズ時の一次電子照射時間)を設定する。
【0107】
設定した条件において計測した測長値を局所帯電補正計算部303に313bを経由して入力する。帯電可変パラメータもしくは倍率変動量Bを、313gを経由して記憶部301へ入力する。記憶部301で入力された帯電可変パラメータに適応するΔVsと帯電可変パラメータを関連付けるフィッティング係数もしくは倍率変動量Bを、313hを経由し局所帯電補正部303に入力する。入力されたデータを用いて補正を行い計算した補正後の測長値を、313dを経由して出力する。
【0108】
図21に補正データを記憶している場合の測定手順のフローチャートを示す。ステップ201で帯電可変パラメータ及び測定条件を設定する。ステップ202において、ステップs201で設定した条件に従い試料に電子ビームを照射し試料を帯電させる。ステップs203で、ステップs201、もしくはステップs209で定めた帯電可変パラメータの下で計測した測長値Lexを得る。ステップs204で十分な精度で測長が行えたか判断する。十分な精度での測長が行えていないと判断した場合、ステップs209で観察条件を設定しなおす。
【0109】
ステップ206で、記憶部301から補正データとして同じ帯電可変パラメータの下で過去に導出した倍率変動率BもしくはVsを表すフィッティング関数のフィッティング係数を読み込む。ステップs207で、取得した測長値Lex、及びステップs201或いはステップs208で定めた帯電可変パラメータから、補正可能か否かを判断する。補正不可能と判断した場合、ステップs209で観察条件を設定し直す。
【0110】
ステップ208で局所帯電補正部303にステップs205で計測した測長値Lexを入力する。同時にこのデータを用いて局所帯電補正部303で補正を行い補正後の測長値を得る。
【0111】
本実施例を用いて局所帯電補正を行うことにより、一度測定をした試料の少なくとも同一パターン,同一条件部についての局所帯電補正を一つの帯電可変パラメータの下で計測した測長値から行うことができるため、測長時間の短縮を測ることができる。ステップs201で特開2000−200579号公報に示されるような最適プリドーズ条件を設定すればより高精度で安定した観測を行うことができる。
【0112】
本実施例の第3の具体例は、補正された測長値の信頼性向上のために、記憶部301に、過去に測定した同種の試料における測定条件及び倍率変動量B及びVsのフィッティング関数のフィッティング係数をデータベースとして備えた構成を説明する。
【0113】
本実施例は記憶部301に上記のデータベースを備えることにより、局所帯電補正後の測長値の精度を、補正後の測長値の偏差として定量的に評価する。この測長値の偏差から閾値を設定する。設定した閾値を超える測長値を計測した場合、異常測定を行ったと判断し、異常測定の原因が試料表面についた不純物などの影響による異常帯電の影響によるかそうでないかを判別する。
【0114】
本実施例を用いる場合の手順を次に示す。まずデータベース構築の手順を示す。試料の局所帯電電圧ΔVsを変化させ計測した同一点間の測長値から、複数個の局所帯電電圧のフィッティング係数を導出する。同様に同種の試料の異なる二点間の測長値から局所帯電電圧ΔVsのフィッティング関数のフィッティング係数を導出する。
【0115】
これを繰り返すことにより求められた複数のフィッティング係数のうち帯電可変パラメータに依存しない項のフィッティング係数a1のばらつきを抽出する。フィッティング係数a1のばらつき及びフィッティング係数a1のばらつきを測長値の偏差に直したものを記憶部301に記憶する。
【0116】
次に構築したデータベースを用いて、異常帯電の有無を判定するための手順を次に示す。試料の交換毎もしくは測長する毎に、帯電可変パラメータを変化させ計測した測長値から導出した測長値が、記憶部301に記憶していた測長値の偏差から求められた閾値を超える時、図22(a)(b)に示す画面の表示例を表示し使用者に帯電異常の有無を知らせる。
【0117】
今回の補正に用いられたフィッティング係数a1が記憶部301に記憶されている過去に測定されたフィッティング係数a1のばらつきから求められた閾値内である場合、局所帯電は正常に行われていると推定し異常帯電が無いことを示す。
【0118】
今回の補正に用いられたフィッティング係数a1の値が記憶部301に記憶されているフィッティング係数a1のばらつきから求められた閾値を超える場合は異常帯電が生じたことを示す。本実施例を用いることにより、局所帯電の異常帯電の有無を知ることができるため高信頼度の補正後の測長値を求めることができる。
【0119】
本実施例の第4の具体例は、上記の実施例のすべてを組み合わせた機能を持つものである。本実施例のフローチャートを図23に示す。ステップs1で記憶部301に今回の観測試料に対する補正データ有無の判別を行う。記憶部301に今回の測長に必要な補正データが無い場合、ループ1のフローに入りステップs100で第1の具体例に示す処理を行うことにより補正後の測長値Lを導き出す。
【0120】
ステップs120及びステップs160で補正結果を画面に表示し、今回使用した補正データを次回以降使用するかを決定し、次回以降使用する場合ステップs170で記憶部301に補正データを記憶する。ステップs1で補正データがある場合ループ2に入り第2の具体例に示す処理を行うことにより補正後の測長値Lを導き出す。ステップs120で図22(a)(b)に示す画面に補正結果を表示する。
【0121】
ステップ210において、第3の具体例に示す評価を行い帯電異常が検出された場合に、ワーニングを表示しループ3に入り、ステップs100で複数回第1の具体例に示す手順を繰り返すことにより、複数の条件におけるフィッティング係数a1を出力する。ステップs300において、ステップs100で求めた複数個のフィッティング係数の、ばらつきの平均値を用いてフィッティング関数を作る。
【0122】
複数個のフィッティング係数a1のばらつきによる測長値の偏差から、今回作成したフィッティング関数の信頼度を評価する。フィッティング関数が信頼できると判断できなかった場合もう一度ステップs100に戻る。ステップs300で異常帯電部に対して十分信頼できるフィッティング関数を得ることができたと判断した場合、ステップs120で今回作成したフィッティング関数を用いた補正後の測長値及び測長値の偏差等の計算結果を画面に表示する。
【0123】
本実施例を用いて局所帯電補正を行うことにより、同一の絶縁体試料に刻まれた同様なパターンの測長を行う際、より高速に安定した精度で測長を行うことができる。
【0124】
本実施例の第5の具体例では、前回測定した帯電の影響を少なくするために紫外線照射装置314を備えた走査電子顕微鏡の例を説明する。図24に紫外線照射装置を備える走査電子顕微鏡の模式図を示す。
【0125】
113は測定条件等を入力するための入力装置である。紫外線照射装置314から観測ごとに紫外線を試料に照射することにより、前回測定したために蓄積された試料の帯電を初期化することができより安定した寸法の計測を行うことができる。
【0126】
本実施例によれば、絶縁物試料の像観察,寸法測定において、観察倍率の変動量が高精度に計算できる。これによって、超微細化された半導体素子製作のプロセスにおいて、短時間で高精度の寸法管理が可能となる。
【技術分野】
【0001】
本発明は荷電粒子線装置に係り、特に試料上に形成されたパターンの寸法や形状を測定或いは検査する装置を用いた測定方法、及び装置に関する。
【背景技術】
【0002】
近年、半導体素子の高集積化および微細化に伴い、ウェハ上に多種多様なパターンが形成され、その形状や寸法の評価,測定が益々重要となっている。多数の測定点を自動的にかつ高速に処理するためには、測定点の検出を如何に高速に実行できるかが重要であり、そのためには測定点に移動した際にパターン上にフォーカスが合っており、更に所望の観察倍率が設定されていることが必須である。
【0003】
荷電粒子光学系において、ウェハ上へのフォーカス条件は荷電粒子源の加速電圧,ウェハに印加される電圧,ウェハの高さから決定される。例えば特許文献1には、レーザー光をウェハに照射し、その反射光を利用してウェハの高さを検出し、得られた高さ情報を荷電粒子光学系の制御装置の一つである対物レンズ制御系にフィードバックし、測定点への移動が終了すると同時に必要な励磁を対物レンズに印加する方法がとられている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開平11−126573号公報
【特許文献2】特開平7−176285号公報
【特許文献3】特開2001−52642号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかし、近年になって接地しても残留する固定的な帯電をもつウェハが散見されるようになった。この固定的帯電の原因は例えばスピンコーターによるレジスト塗布時の摩擦でレジスト内部での有極性物質が分極し電位が固定するのであるとか、プラズマを使用したエッチング処理による帯電であると言われている。
【0006】
このような試料上に残る帯電は、荷電粒子線のフォーカスずれを招き、更には倍率の変動や荷電粒子線装置による測定の誤差要因にもなっていた。フォーカスずれの問題を解決するために、例えば特許文献2に開示されているように、走査電子顕微鏡の測定点ごとにフォーカスのオフセット値を記憶させ、フォーカスずれによって自動測定が妨げられないような方法がある。また、特許文献3に記載されているように、真空内で試料に近接した場所に複数個の電位計を設置し、その測定結果に基づいた値をリターディング電圧にフィードバックする方法などが考案されている。
【0007】
しかしながら特許文献2に開示の技術には以下の問題がある。ウェハの帯電電圧はその製造過程における温度や湿度,レジストの状態,プラズマ強度に左右されるため、同一の製造過程を経ていても一定ではない。したがって、自動測定用のファイルにフォーカスずれを記憶させてもウェハ毎に更新する必要がある。したがって、ウェハの測定に要する時間が長くなり生産性が低下する。また、ウェハの帯電電位はそのままであるので、実際に使用したい加速電圧と実際の加速電圧が異なるため、形成される二次荷電粒子像に現れる微細な構造やコントラストが異なる、あるいは倍率の制御に誤差が発生するなどの問題は解決されない。
【0008】
また、特許文献3に開示されているように、真空内に設置された電位計を用いる場合、測定点に移動しないとその電位を測定することができないため、一点あたりの測定に要する時間が長くなる、また故障したときには真空容器である荷電粒子光学系およびステージを一旦大気に開放する必要がありメンテナンス性が悪い、また複数個使用する電位計が常に同一の出力をするように調整する必要があるなどの問題がある。
【0009】
本発明の主たる目的の1つは、異なる帯電が混在するが故に、正確な検査,測定が困難になる可能性がある点に鑑み、異なる帯電現象が含まれていたとしても、高精度な検査,測定を可能ならしめる方法、及び装置の提供にある。
【課題を解決するための手段】
【0010】
上記目的を達成するための一態様として、帯電条件の変化を示すフィッティング関数に基づいて、荷電粒子線照射によって得られるパターン寸法を補正する方法、及び装置を提案する。
【発明の効果】
【0011】
上記一態様によれば、特性の異なる帯電現象が混在するような場合であっても、走査荷電粒子線装置による正確な検査,測定を行うことが可能となる。
【図面の簡単な説明】
【0012】
【図1】走査電子顕微鏡の全体構成を表す図である。
【図2】搬送経路におけるウェハと搬送アームと静電電位計との位置関係を示す図である。
【図3】ウェハ面上の帯電分布関数の決定方法についてのフローを示す図である。
【図4】複数個のプローブでウェハの帯電電圧を測定する方法を示す図である。
【図5】静電電位計とエネルギーフィルタを備えたSEMの全構成図である。
【図6】試料高さ計測手段とエネルギーフィルタを備えたSEMの全構成図である。
【図7】エネルギーフィルタの詳細構成図である。
【図8】帯電補正制御部の詳細構成図である。
【図9】対物レンズの光学倍率を説明する図である。
【図10】試料の帯電のメカニズムを説明する図である。
【図11】帯電電圧が倍率を変動されるメカニズムを説明する図である。
【図12】大域帯電電圧と倍率変動感度係数を関係付けるグラフである。
【図13】局所帯電電圧と倍率変動感度係数を関係付けるグラフである。
【図14】照射電子線の照射領域と局所帯電の関係を示すグラフである。
【図15】照射電子線の倍率と倍率変動感度係数の関係を示すグラフである。
【図16】プリドーズ倍率と、実測測長値および推定測長値の関係を示すグラフである。
【図17】局所帯電補正部のブロック図である。
【図18】2以上の帯電測定に基づく局所帯電補正を行う手順を示したフローチャートである。
【図19】プリドーズ倍率による電子線照射を行った際の帯電状況を説明する図である。
【図20】他の局所帯電補正部のブロック図である。
【図21】記憶部に補正データがある場合の局所帯電補正の手順を示すフローチャートである。
【図22】局所帯電補正により推定された測長値の誤差確認画面を示す図である。
【図23】複数の具体例を複合した手順を示すフローチャートである。
【図24】紫外線照射装置を備えたSEMの全体構成図を説明する図である。
【発明を実施するための形態】
【0013】
(実施例1)
以下、図面を用いて本発明の実施形態について述べる。なお、本実施例においては走査電子顕微鏡(Scanning Electron Microscope:SEM)を例にとって説明するが、これに限られることはなく、他のイオンビーム照射装置等の他の荷電粒子線装置にも適用が可能である。また、本実施例は、荷電粒子の1つである二次電子、及び/又は反射電子を検出する例を説明するが、これに限られることはなく、例えば二次イオン等、他の荷電粒子を検出するようにしても良い。
【0014】
図1は本発明の全体構成を示したものである。全体制御部42はユーザーインターフェース43からオペレータによって入力された荷電粒子の加速電圧,ウェハ情報,観察位置情報などを基に、荷電粒子光学系制御装置41,ステージ制御装置40,ウェハ搬送装置28を介して、装置全体の制御を行っている。
【0015】
全体制御部からの命令を受けたウェハ搬送装置28はウェハカセット29から搬送アーム30によりウェハを取り出し、真空に保持されている試料交換室25と大気である外部とを分離するゲートバルブ26bを開けウェハを試料交換室に導入する。試料交換室に入ったウェハはゲートバルブ26aを介して試料室24に送られ、試料ステージ21上に固定される。
【0016】
荷電粒子光学系制御装置41は全体制御部42からの命令に従い高電圧制御装置34,リターディング制御部33,コンデンサレンズ制御部35,増幅器36,アライメント制御部37,偏向信号制御部44,対物レンズ制御部39を制御している。引出電極12により荷電粒子源11から引き出された一次荷電粒子線13はコンデンサレンズ14,対物レンズ18により収束されウェハ19上に照射される。途中荷電粒子線はアライメントコイル16によりその軌道を調整され、また、偏向信号増幅器38を介して偏向信号制御部から信号を受けた偏向コイル17によりウェハ上を二次元的に走査される。なお、以下の説明では荷電粒子線の光学条件を変更するための信号を各光学素子に送り、必要な演算を行う構成を制御部,制御装置、或いは制御プロセッサ等と呼ぶこともある。
【0017】
ウェハにはリターディング制御部33から荷電粒子線を減速するためのリターディング電圧(電子顕微鏡の場合は負電圧)が印加されている。上記ウェハ19への一次荷電粒子線13の照射に起因して、ウェハから放出される二次荷電粒子20は二次荷電粒子検出器15により捕捉され、増幅器を介して二次荷電粒子像表示装置46の輝度信号として使用される。また二次荷電粒子像表示装置の偏向信号と、偏向コイルの偏向信号とは同期しているため、二次荷電粒子像表示装置上にはウェハ上のパターン形状が忠実に再現される。
【0018】
ウェハ上のパターンを高速に検査,観察するためには試料ステージが所望の観察点に移動したときのウェハ高さを検出し、その高さに応じた対物レンズのフォーカスをあわせることが必要である。そのため、光を用いたウェハ高さ検出機能が設けられている。試料ステージ位置検出部32により試料ステージ位置を検出し、所定の位置近傍に試料ステージが接近した時点から高さ検出用レーザー発光器22がウェハに向けて光を照射し、その反射光をポジションセンサ23で受光し、その受光位置からウェハの高さを検出する。そして検出された高さに応じたフォーカス量が対物レンズにフィードバックされる。その結果、試料ステージが所定の位置に到達した際にはすでにフォーカスが設定されており、オペレータによる操作なしにパターンの検出を自動で行うことができる。
【0019】
ウェハが帯電していない場合、フォーカスに必要な対物レンズの励磁電流は一般的に式(1)に示すような関数で表される。
【0020】
Iobj=F(Vo,Vr,Z) (1)
ここで、Iobjは、ウェハが帯電していないときの対物レンズの励磁電流、Fは、対物レンズの励磁電流を計算する関数、Voは荷電粒子源の電圧、Vrはウェハの電位(ウェハに印加されるリターディング電圧)、Zはウェハの高さである。関数Fは電子光学シミュレーションあるいは実測により導出することができる。通常帯電していないウェハの電位はウェハに印加されたリターディング電圧と同電位で式(1)に示す関係が成り立つため、所定のフォーカス制御が可能である。ところがウェハ自身が帯電している場合に必要な対物レンズの励磁電流は式(2)に示すような値となり、帯電していない場合と帯電している場合ではフォーカス電流が異なる。
【0021】
Iobj′=F(Vo,Vg′,Z) (2)
そのためいくら高さを正確に検出できても、フォーカスが合わないために二次荷電粒子像がぼやけ観察点の検出に失敗し自動での測定が不可能となる。Iobj′はウェハが帯電しているときの対物レンズの励磁電流、Vg′はリターディング電圧Vrとウェハ帯電電圧ΔVgの合計電圧Vg=Vr+ΔVgである。
【0022】
これらウェハの帯電はレジストや下地の材質などにより異なるが、多くの場合は同心円状に帯電している。本発明は、このように同心円状に帯電したウェハの帯電量を測定し、その電位をフィードバックするものである。ウェハカセット内に格納されたウェハを搬送アーム30(搬送機構)が取り出し、試料交換室内に搬送する途中にプローブ31により測定する。その測定値は静電電位計45を介して荷電粒子光学系制御装置に伝達される。
【0023】
なお、本実施例では、試料上の電位を測定するプローブが、搬送機構によって搬送される試料移動軌道の上であって、試料から離間した位置に配置される例について説明するがこれに限られることはない。例えば試料室と予備排気室との間で試料を受け渡しするための機構や、外部から予備排気室へ試料を導入する機構による搬送軌道上にプローブを配置するようにしても良い。
【0024】
上記説明にあるように、ウェハは同心円状に帯電する傾向にあるので、ウェハ面上の中心位置を含む直線状に電位分布を計測すれば、おおよそ試料全体の電位分布が把握できることによる。以下の説明は、このような電位分布を示す半導体ウェハのような試料を測定する走査電子顕微鏡に特に有効な実施例を示すものである。
【0025】
図2は、ウェハカセットと試料搬入機構の一要素である搬送アームとウェハと静電電位計と試料交換室の関係を示したものである。ウェハはウェハカセット29から搬送アーム30によって取り出され、試料交換室25内へと搬送される。静電電位計のプローブ31はウェハの搬送経路上で、かつその中心線52がウェハの中心線51とウェハ上で一致するように固定台53により固定されている。静電電位計のプローブはウェハと接地されている搬送アームの両方の電位を測定することになるので、搬送アームの接地電位をもとにウェハ電位を校正できるのでより正確な測定値となる。またウェハの通過位置は常に一定であり、プローブも固定台により固定されているためこれら2つの位置関係が変わらないため常に安定した測定が行える。また、プローブが真空外にあるため、プローブが故障した場合でもその修理や交換が容易な構造となっている。
【0026】
この様に本実施例では取り扱いの容易性を考慮して、真空外にプローブを配置しているが、これに限られることなくウェハが通過する道程のいずこかに配置しておいても良い。また、本実施例ではプローブの中心と、ウェハの中心線が一致するようにウェハを移動させているが、これに限られることはない。上記説明にあるように、ウェハの帯電は同心円状に帯電することが多い。この帯電の分布が、ウェハの中心を最高点としてウェハの縁にいくに従って、帯電量が低くなるような、いわゆる山なりに形成されるような場合、プローブの中心がウェハの中心から若干ずれていたとしても、電位分布のおおよその把握ができるので、ウェハ中心からずれた線状の電位分布から、全体の電位分布を把握しても良い。
【0027】
図3は表面電位の測定から帯電電圧をウェハ面上の分布関数として表現し、リターディングにフィードバックするための手順を示したものである。一般的にウェハの搬送アームは一定速度では運動していないので電位測定の周期は時間的には一定であってもウェハ上の座標は一定間隔ではない。そこで搬送アームの速度パターンから電位測定時のウェハ上の座標を計算すれば正確な座標に対応した電位が得られる。この得られたデータをもとに電位の分布関数を作る。まず、得られたすべてのデータを使用して偶関数(図3では4次関数)で近似式を作成する。
【0028】
次に各測定点において近似式との差分を計算する。電位の測定値には誤差が含まれており、この差分値が設定された閾値より大きいものは測定値の誤差が大きいものとして除外する。除外されたデータを除き再度近似式を作成する。この手順を何度か繰り返し、最終的にすべての値の差分が閾値よりも小さくなれば終了する。ここで作られた関数はウェハの中心からの距離に対する電位の関数である。
【0029】
この関数と、ステージ制御装置から得られたステージ座標から補正すべき電位が計算され、図1に示したリターディング制御部を介して補正電位がウェハに供給される。データの取得は観察するウェハが試料交換室に送られるたびに行われ、そのウェハの観察が終わり、元のウェハカセットに戻すための命令が発生するまで有効である。
【0030】
以上が本発明実施例の説明である。本発明実施例では測定されたウェハの帯電電位をそのままリターディング電圧にフィードバックする方法を示したが、帯電電位を対物レンズの励磁電流に変換してフィードバックしてもよい。ただしこの場合はリターディング電圧とウェハの帯電電位を足して荷電粒子源の電位を上回らないことが必要である。たとえば荷電粒子源の電圧が−2000Vであり、試料に照射する荷電粒子の電位を−300Vにしたい場合、ウェハにかかるリターディング電圧は−1700Vであることが必要である。
【0031】
この条件で最大−290V帯電しているウェハを観察する場合を考えると、リターディングに−290Vを補正する電位を印加しても、あるいはその電位を励磁電流に換算して対物レンズに印加しても一次荷電粒子線は試料に到達することができる。しかし、最大−310V帯電しているウェハではリターディング電圧と帯電電圧を足すと−2010Vとなり荷電粒子源の電位を上回る。
【0032】
この場合、一次荷電粒子線は試料に到達することができず反射されてしまう。この場合にはリターディング電圧に−310Vを補正するための電圧310Vを印加しなければならない。また測定された電位はリターディング電圧ではなく荷電粒子源の電位にフィードバックしてもよい。更に本発明実施例では、フィードバックの対象を、インダクタンスが大きく高速制御が難しい磁界レンズではなく、リターディング電圧としているが、対物レンズを静電レンズとするか、或いは磁界レンズの他に静電レンズを設けて、これら静電レンズに、帯電電位に基づいて得られるフォーカス補正値をフィードバックするようにしても良い。
【0033】
また、他にも対物レンズ内に正電圧を印加した筒状電極を配置するいわゆるブースティング法を用いたSEMの場合、印加される正電圧を調整することによって、フォーカスを調整するようにしても良い。更に他にも電子線のフォーカスを調整する技術全般の適用が可能である。
【0034】
今回の発明では静電電位計のプローブがウェハの中心と一致するように一つ置く場合について述べたが、複数個のプローブを設置してもよい。図4は複数個のプローブをウェハの搬送経路に並べてウェハ面全体の測定を行う場合の構成図の一つである。プローブ31は固定台の上に複数個マトリクス状に並べられている。この場合、ウェハ19は搬送中に所定の位置で一旦停止しそれぞれの場所の帯電を測定する。搬送アームは停止しているので速度と座標との関係を考える必要がない、あるいは帯電が軸対称分布をしていない場合でも分布関数を作ることができるなどのメリットがある。また、全自動で半導体のパターン幅や欠陥を検査する走査電子顕微鏡は、予め測定個所が決まっているので、その測定個所、或いはその近傍の帯電量を選択的に検知しておき、フィードバックをかけるようにしても良い。
【0035】
なお本実施例においては、単なる帯電量に基づくフィードバックだけではなく、他の情報も重畳してリターディング電圧のフィードバック値を求めるようにしても良い。また、何等かの原因で静電電位計に不具合が発生した場合、リターディング電圧へのフィードバックを行うと、逆にフォーカス値がずれる可能性があるので、フォーカスを評価する手段を他に設けておき、フォーカス評価値が異常を示す場合に、静電電位計の故障診断を行ったり、帯電電位測定に基づくフォーカスのフィードバック処理を中止したり、オペレータに異常がある旨を警告するような手段を設けておいても良い。
【0036】
以上説明したように、本発明によってこれまで帯電しているためにフォーカスずれが発生し、自動測定時のパターン検出の成功率が低下していたウェハでもその帯電電位を補正することができるようになるので、帯電していないウェハと同様に自動測定が可能となる。またウェハ毎に帯電電圧を測定するので、測定用ファイルに依存せずまた帯電の有無やその大きさによるファイルの修正を必要としないなどのメリットがある。
【0037】
(実施例2)
以下に示す実施例は、試料(半導体ウェハ等)に異なる帯電現象が混在するが故に、正確な検査,測定が困難であるという点に鑑み、異なる帯電現象が含まれていたとしても、高精度な検査,測定を可能ならしめる方法、及び装置に関するものである。
【0038】
荷電粒子線装置では、前述したように、荷電粒子線の走査と同期して二次荷電粒子検出器の出力情報が像表示装置に再現される。試料上の2点間距離aに対するブラウン管(像表示装置)上の走査像の2点間距離Aの比が観察倍率MSEMである。
【0039】
MSEM=A/a (3)
通常、ブラウン管上の画面の大きさは固定であるから、試料上の2点間距離aは観察倍率MSEMに反比例する。従って、ブラウン管上の走査像の2点間距離Aを計測し、観察倍率MSEMで除することにより、試料上の配線寸法等a=A/MSEMを導出できる。
【0040】
近年、半導体産業の微細化が進んだことから、SEMが光学顕微鏡に代わって、半導体素子製作のプロセスまたはプロセス完成後の検査(例えば電子ビームによる寸法測定や電気的動作の検査)に使われるようになった。絶縁物が使われている半導体産業の試料(ウェハ)では、一次電子ビームの照射により絶縁物の帯電が時間的に変動し、走査像が劣化する。
【0041】
この問題を避ける代表的な技術として特開平5−151927号公報に記載のSEMでは、観察時の倍率とは異なる倍率で一次電子ビームを照射し、積極的に試料表面を帯電させるプリドーズ方式を備えている。続いて、特開平9−171791号記載のリターディング方式及びブースティング方式が開発され、試料に印加するリターディング電圧を調整し、絶縁物が正に帯電する1kV以下の低加速電圧の一次電子ビームで観察することにより、再現性のある安定した表面帯電が生成できるようになり、かつ3nm程度の高分解能が実現できた。
【0042】
その後、特開2000−200579号公報記載のSEMのように、通常観察時の一次電子ビームとは異なるエネルギーの電子ビームを予め照射し、より積極的に表面帯電を生成する方式が開発された。これらの方式により、安定した高い表面帯電電圧が容易に生成でき、アスペクト比の高いコンタクトホール底面部の残膜や帯電電圧の差異に基づく電位コントラストの観察が可能となった。
【0043】
しかし、前記の表面帯電電圧の条件で観察した場合、表面帯電を増加させるに従って寸法測定値が数%程度変動することが判明した。この寸法測定値変動量は、より微細化した製造プロセスにおいて、許容限界に達している。この不具合の原因は、表面帯電に伴って観察倍率MSEMが変動しているためである。
【0044】
図9は走査偏向器,対物レンズと試料からなる電子光学系において、観察倍率MSEMと対物レンズ106の光学倍率Mobjに対する走査偏向器107のコイル電流I7の関連を示している。クロスオーバー面の一点から放射状に出射された一次電子ビーム101はウェハ108面上の一点に集束する。走査偏向器107を使って、仮想的な一次電子の出射点が中心軸から1だけ離れるようにすると、試料面ではMobjだけ離れる。走査偏向器107の換算係数およびコイル電流をそれぞれ、KおよびI7とすると試料上の2点間距離aは次式で計算できる。
【0045】
a=KMobjI7 (4)
また、ブラウン管の換算係数をLとすると、ブラウン管上の走査像の2点間距離Aは次式となる。
【0046】
A=LI7 (5)
ここで、光学倍率がMobjからMobj′に変動した場合を考えると、試料上の2点間距離aを走査するための電流はI7からI7′に変化し、ブラウン管上の走査像の2点間距離はAからA′に変化する。
【0047】
a=KMobjI7′ (6)
A′=LI7′ (7)
結局、観察倍率はMSEMからMSEM′に変動する。
【0048】
MSEM′=(Mobj/Mobj′)MSEM (8)
次式を用いれば、観察倍率が変動しても、正しく寸法測定できる。
【0049】
a=A′/MSEM′ (9)
結局、高精度の寸法測定のためには、帯電の有無に依らず光学倍率MobjとMobj′が精度良く計算できれば良い。
【0050】
図10はウェハにおける表面帯電の原理を説明している。ウェハ基板にはリターディング電圧Vrが印加されている。ウェハはスピンコーターによるレジスト塗布時の摩擦や、プラズマを使用したエッチング処理のため、SEMで観察する以前から(a)の固有な帯電をしている場合がある。(a)の帯電電圧はウェハの全面に渡っており、大域帯電電圧ΔVgと呼ぶことにする。観察点付近での大域帯電電位はVg=Vr+ΔVgである。大域帯電電位Vgでの光学倍率Mobjは式(1)同様な次式で表せる。
【0051】
Mobj=M(Vo,Vg,Z) (10)
この関数Mについても、電子光学シミュレーションあるいは実測により導出することができる。一方、電子ビーム照射による帯電電圧ΔVsは(b)のように局所的であり、局所帯電電圧と呼ぶことにする。両者の帯電が重畳した場合(c)の局所電位はVs=Vg+ΔVsである。
【0052】
図11は試料の大域帯電電位Vgおよび局所帯電電圧ΔVsが対物レンズの光学倍率Mobjを変動させるメカニズムを説明している。大域帯電電位Vgは対物レンズ106a内の電位を変化させるため、静電レンズが試料上に形成され、フォーカスがずれることになり、そのフォーカスを合わせると、励磁電流I6の顕著な変化として現れる。I6が変化し、さらに試料への入射エネルギーも変動するので、軌道1aのように集束し、光学倍率Mobjが変動する。しかし、逆にI6の変動量からVgを推測できる。
【0053】
一方、電子ビーム照射による帯電電圧ΔVsは局所的であるため、励磁電流I6への影響がほとんど無い。それにもかかわらず、局所帯電電圧ΔVsは微小な静電レンズ108bを形成するため、一次電子101を軌道101bのように集束させ光学倍率Mobjを大きく変動させる。以上のような事実から、大域帯電はフォーカスに大きな影響を与え、局所帯電は倍率に大きな影響を与えることが確認できた。
【0054】
以上のように、全く特性の異なる2つの帯電現象が含まれ、それぞれの帯電が、倍率やフォーカスに与える影響の程度が異なるため、これらを分離せずに補正を試みても、精度の高い補正が実現できなかった。
【0055】
このような課題を解決するためには、大域帯電電圧ΔVgおよび局所帯電電圧ΔVsを分離して計測、あるいは推定する手段を設け、これらのデータに基づいて正しい光学倍率Mobjを計算する手段が実現できればよい。
【0056】
この倍率補正量に基づいて走査偏向器の偏向強度を補正することにより指定観察倍率の二次元走査像を正確に表示することができるが、半導体プロセスの寸法測定においては、測長値そのものに倍率補正する簡便化が実用的である。
【0057】
図12および図13を用いて上記した本発明の作用を示す。
【0058】
図12はリターディング電位Vr=−1.2kVにおいて、大域帯電位Vgが−0.6kVから−1.5kVの範囲で変動した場合の倍率変動感度係数Tgを示している。TgとΔVgから倍率変動量ΔMg=(Mobj′−Mobj)が次式で計算できる。
【0059】
ΔMg/Mobj=Tg*ΔVg (11)
ここで、Tgは帯電前の観察条件および大域帯電電位Vgによって変動するため、観察条件毎に図8のグラフを予め実験あるいは計算により記憶させておくことが必要となる。あるいは、式(11)を用いずに大域帯電電位Vgから直接、倍率MobjあるいはMobj′を求めても問題ない。
【0060】
一方、図13はリターディング電位Vr=−1.2kVにおいて、ビーム照射面積を変動した場合の倍率変動感度係数Tsを示している。TsとΔVsから倍率変動量ΔMs=(Mobj′−Mobj)が次式で計算できる。
【0061】
ΔMs/Mobj=Ts*ΔVs/Vacc (12)
ここで、Tsは帯電前の観察条件およびビーム照射面積によって変動するが、式(12)が示すように倍率補正量ΔMsと局所帯電電位ΔVsとはよい比例関係にある。また、Tsはビーム照射面積(即ち、照射倍率)に応じて4つの区間に分けることができる。50倍より低倍率では大域帯電と見なせる。50倍から500倍の区間では大域帯電から局所帯電への遷移領域にある。500倍から5000倍の区間ではほぼ一定値と見なせる。5000倍より高倍率では徐々にTsが減少する傾向にある。従って、倍率変動感度係数Tsがほぼ一定値と見なせる500倍から5000倍の区間を含むように、照射面積の一辺を10μmから300μmにすれば、補正値の推定精度を保持したまま、予め記憶しておくデータ数を削減できるので好都合である。
【0062】
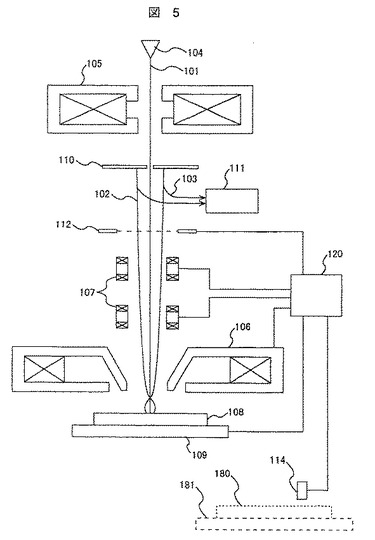
図5に、本実施例におけるSEMの第1の具体例を示す。陰極104から引き出された一次電子ビーム101はコンデンサレンズ105で絞られ、さらに走査偏向器107によってウェハ108上を二次元走査される。一次電子ビーム101は、試料ステージ109を介してウェハ108に印加した負のリターディング電圧のため、対物レンズ106とウェハ108間の減速電界で減速され、かつ対物レンズ106のレンズ作用でウェハ108上に細く絞られる。
【0063】
一次電子ビーム101がウェハ108を照射すると二次電子102が発生する。対物レンズ106とウェハ108間に作られている電界は、発生した二次電子102に対しては加速電界として作用するため、対物レンズ106の電子ビーム通過孔内に吸引され、対物レンズ106の磁界でレンズ作用を受けながら上昇する。上昇した二次電子102は変換電極110に高エネルギーで衝突し、新たな二次電子103を発生する。この二次電子103は正の約10kVの高電圧を印加したシンチレータ111に吸引され、シンチレータ111に衝突した際、光を発生する。図示していないが、この光をライトガイドで光電子増倍管に導き、電気信号に変換し、増幅した後、この出力でブラウン管の輝度変調を行う。
【0064】
なお、図5の説明は制御プロセッサ部が走査電子顕微鏡と一体、或いはそれに準ずるものとして説明したが、無論それに限られることはなく、走査電子顕微鏡鏡体とは別に設けられた制御プロセッサで以下に説明するような処理を行っても良い。その際には二次電子検出器で検出される検出信号を制御プロセッサに伝達したり、制御プロセッサから走査電子顕微鏡のレンズや偏向器等に信号を伝達する伝達媒体と、当該伝達媒体経由で伝達される信号を入出力する入出力端子が必要となる。また、以下に説明する処理を行うプログラムを記憶媒体に登録しておき、画像メモリを有し走査電子顕微鏡に必要な信号を供給する手段を備えた制御プロセッサで、当該プログラムを実行するようにしても良い。
【0065】
本実施例装置では、大域帯電電圧ΔVgの計測手段(電位分布計測装置)として、例えば実施例1で説明したような静電電位計を備える。ウェハの大域帯電電圧は同心円状なので、ウェハ面上の中心位置を含む直線状に電位分布を計測すれば、おおよそ試料全体の電位分布が把握できることができる。従って、具体的には、実施例1に記載のように、ウェハ180の搬送経路上に静電電位計プローブ114を固定し、搬送アーム181の移動を利用して直線状に測定する方法が適当である。測定データを用いて、大域帯電電圧ΔVgをウェハ中心からの距離rの関数として表現し、測定点が移動するごとにリターディング電位Vrをフィードバックし、一次電子ビーム101がウェハ108に入射する電圧が常に一定値Vacc=Vo+Vgとなるようにする。ここで、Voは陰極104の電圧に相当する。
【0066】
さらに、本実施例では、局所帯電電圧ΔVsの計測手段(電位計測装置)として二次電子のエネルギーフィルタを備える。例えば、変換電極110の下にメッシュ電極112を設置し、大域帯電電位Vgを基点としてメッシュ電極112の印加電圧を走引し、二次電子の信号量変化(いわゆるSカーブ)を計測する。表面が導電性の試料で測定したSカーブと実試料の観察点でのSカーブを比較し、シフト電圧を局所帯電電圧ΔVsとする。
【0067】
帯電補正制御部120は上述した大域帯電電位Vgの測定、局所帯電電圧ΔVsを得るまでのSカーブ測定シーケンスを実行する。さらに、求めたVg,ΔVs、および対物レンズ106の励磁電流等に基づいて倍率補正量を計算し、走査偏向器107の偏向強度を補正する。
【0068】
本実施例では、大域帯電に比べて局所帯電の方が倍率に与える影響が大きいことに鑑み、特定箇所の帯電量(局所帯電量)から大域帯電量に相当する値を差し引いた値に基づいて、倍率補正を行う。単なるエネルギーフィルタによる帯電量測定では、局所帯電と大域帯電(少なくとも走査領域より大きな領域の帯電、例えば倍率50倍の観察領域より大きな領域)が複合された状態で検出されてしまうため、本実施例ではエネルギーフィルタで計測された帯電量から、静電電位計114で計測された電子線の走査箇所における帯電量を差し引くことで、大域帯電によらない真の電子線照射に基づく局所帯電量を計測することが可能になる。
【0069】
また、本実施例装置では、上記演算式で得られた倍率変動量ΔMsに基づいて、走査偏向器の偏向範囲を調整することもできるし、計測された測長値を補正することも可能としている。
【0070】
走査偏向器の偏向範囲を調整する場合には、電磁式の走査偏向器の場合、倍率変動量ΔMsを補正するに必要な電流を、もとの偏向電流に加算或いは減算すると良い。また、測長値へのフィードバックについては、既知の走査電子顕微鏡等に採用されている測長法によって得られた測長値に、倍率変動比を乗除算することで、正確な測長値を算出することができる。なお、本実施例は大域帯電と局所帯電を分離して計測することを要旨とするものであり、上記走査偏向器の調整法や測長値の補正法は特に上述するものに限られない。
【0071】
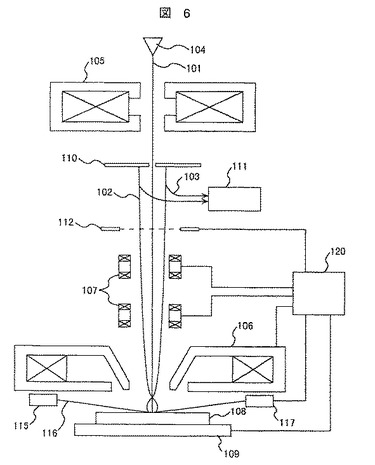
図6は本実施例の第2の具体例である。この具体例では、先の具体例の静電電位計に代えて、試料高さを計測する手段を追加した。例えば、所定の観察点近傍に試料ステージ109が接近した時点から高さ検出用レーザー発光器115がウェハ108に向けてレーザー光116を照射し、その反射光をポジションセンサ117で受光し、その受光位置からウェハの高さを検出する、いわゆるZセンサを備える。ジャストフォーカスとなる対物レンズの励磁電流と試料高さのデータから、大域帯電電位Vgが一意に決まるので、予めこれら3つの物理量の関係を実験、あるいは電子光学シミュレーションによって計算しておけば、直接電位を測定しなくても大域帯電電位Vgが推測できる。
【0072】
本実施例では、帯電補正制御部120は上述した大域帯電電位Vgを推測するまでのZセンサによる試料高さ計測,局所帯電電圧ΔVsを得るまでのSカーブ測定シーケンスを実行する。さらに、先の具体例と同様に、求めたVg,ΔVs、および対物レンズ106の励磁電流等に基づいて倍率補正量を計算し、走査偏向器107の偏向強度、或いは得られた測長値を補正する。
【0073】
次に実施例の更なる具体例を説明する。これは以上の2つの具体例で述べた静電電位計と試料高さを計測する手段の両方を備えたSEMである。両手段を備えることにより、大域帯電電位Vgと局所帯電電圧ΔVsをより高精度に、安定して計測できる。
【0074】
即ち、静電電位計プローブ114の測定データ、あるいはフィッティングされた関数によって第一近似値Vg(1)を求め、Zセンサからの試料高さデータを加味してジャストフォーカスとなる対物レンズの励磁電流を推定しておけば、ジャストフォーカスの探索(いわゆるオートフォーカス)を短時間に完了することができる。Vg(1)から計算した対物レンズの励磁電流とオートフォーカスで求まった励磁電流の差から、正確な大域帯電電位Vgを計算することができる。Vgが正確であれば、局所表面電位Vsとの差であるΔVs=Vs−Vgは正確に計算でき、倍率補正精度も向上する。
【0075】
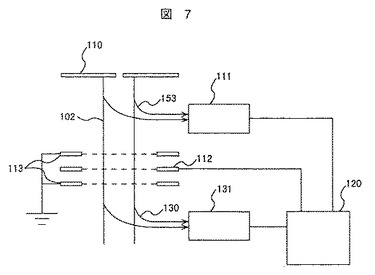
図7は上述した実施例が備えるエネルギーフィルタをより詳細に説明している。二次電子変換電極110の下に、接地されたメッシュ電極113で上下に挟まれたメッシュ電極112を設置し、大域帯電電位Vgあるいは第一近似値Vg(1)を初期値としてメッシュ電極112の印加電圧を走引し、Sカーブ(エネルギーフィルタへの印加電圧を変化させたときの二次電子量分布)を計測する。接地されたメッシュ電極113はメッシュ電極112の電界が変換電極110等への不要な広がりを防止する。また、下側のメッシュ電極113にはメッシュ電極112の電圧に依らず、一定量の二次電子102が衝突し、一定量の新たな二次電子130が生成される。この二次電子130は正の約10kVの高電圧を印加したシンチレータ131に吸引される。シンチレータ111からの電流I11をシンチレータ131からの電流I31で規格化することで、Sカーブを高精度に計測できる。シンチレータ111の場合と同様にブラウン管に像表示も可能である。
【0076】
図8は、特に上述した3つ目の具体例の帯電補正制御部120を詳細に説明している。帯電補正制御部120は、静電電圧計測データテーブル201,オートフォーカス制御部202,大域帯電電位計算部203,Sカーブを自動計測するエネルギーフィルタ電圧制御部204,局所帯電電圧計算部205および倍率補正計算部206から成る。
【0077】
まず、静電電圧計測データテーブル201には静電電圧計で測定した試料の座標に対する電圧V14のデータ、あるいはフィッティングされた関数形を記憶しておく。観察点が移動する毎に対応する大域帯電電圧ΔVgを計算し、所望の加速電圧Vacc=Vo+ΔVg+Vrを満足するように試料ステージ109へのリターディング電圧V9(=Vr)を調整する。オートフォーカス制御部202はZセンサからの試料高さデータZiと設定した加速電圧Vaccに対する励磁電流I6(1)を計算し、この電流の近傍を走引することで、ジャストフォーカスする励磁電流I6を探索する。続いて、大域帯電電位計算部203はI6(1)とI6に差が有る場合に加速電圧Vaccに誤差があると考え、ΔVgを修正し、正確な大域帯電電位Vgを求める。
【0078】
一方、エネルギーフィルタ電圧制御部204は帯電のない状態でのSカーブを計測し、局所帯電電圧計算部205に記憶しておく。Sカーブの計測シーケンスは上述したように、大域帯電電位Vgあるいはその推定値Vg(1)を基点としてメッシュ電極112の印加電圧V12を走引し、二次電子の電流I11の変化を計測する。シンチレータ31からの電流I31で規格化することもできる。記憶しておくデータとしては、Sカーブそのもの、あるいは閾値を超えるフィルタ電圧,Sカーブの傾斜が最大となるフィルタ電圧等の処理済みのデータでも良い。試料の材質に依存してSカーブが若干異なるので、材質毎にデータを記憶することで、以後の計算精度を高めることができる。局所帯電電圧計算部205は基準となるSカーブを選択し、電圧のシフト量から局所帯電電圧ΔVsを計算する。最後に、倍率補正計算部206は大域帯電電位Vgと局所帯電電圧ΔVsから、それぞれの式(1)および(2)を用いて倍率補正量ΔMg,ΔMsを計算し、総合的な倍率M+ΔMg+ΔMsの逆数で走査偏向器の電流I7を補正することで、帯電電圧に依らずに常に所望の倍率で像観察ができる。
【0079】
半導体素子製作ラインで大量のウェハを自動処理する場合には、エネルギーフィルタによるSカーブ測定回数を減らして、処理速度を上げることが有効である。同一回路バターン,同一材料においては局所帯電電圧ΔVsは同一となるので、測定済みのΔVsを流用することができる。場合によっては、ウェハ毎に一回のSカーブ測定で済ませることも可能である。新規にSカーブを測定した場合には局所帯電電圧計算部205のデータベースに自動的に追加される。
【0080】
本実施例によれば、絶縁物試料の像観察,寸法測定において、観察倍率の変動量が高精度に計算でき、所望の観察倍率に固定、或いは倍率変動によって変化する測長値を補正することも可能である。これによって、超微細化された半導体素子製作のプロセスにおいて、高精度の寸法管理が可能となる。
【0081】
また、付加的効果として、試料に入射する一次電子ビームのエネルギーを高精度に制御可能であることから安定した画質がえられる。さらに、局所帯電電圧ΔVsをモニターしておくことにより、過大な帯電による絶縁破壊の防止,アスペクトの大きなコンタクトホール底面観察が可能な帯電電圧が得られているかの指標とすることができる。
【0082】
(実施例3)
図11を用いて説明したように、局所帯電電圧ΔVsは、対物レンズの光学倍率Mobjを変動させる。電子ビーム照射による帯電電圧ΔVsは局所的であるため、励磁電流I6への影響がほとんど無い。それにもかかわらず、局所帯電電圧ΔVsは微小な静電レンズ108bを形成するため、グローバル帯電(大域帯電)によって偏向された一次電子の軌道101aを軌道101bのように集束させ光学倍率Mobjを大きく変動させることは、先の実施例で説明した通りである。
【0083】
このように、異なる帯電現象が複合しているために、困難となっている正確な検査,測定を行うための更なる手法を以下に説明する。
【0084】
本実施例では、局所帯電電圧ΔVsによる倍率変動の補正を行い、正しい光学倍率Mobjを計算する手法を提案する。
【0085】
局所帯電によって引き起こされる倍率変動は、局所帯電電圧ΔVsに依存し、局所帯電電圧ΔVsは、電子線の照射倍率(本実施例では、検査,計測のための電子線照射の前に、本実施例で説明するような電子線照射を行うことを主に説明するため、以下プリドーズ倍率とする)Mpreと試料表面近くの電場と試料の種類に依存する。
【0086】
図14にブースティング電圧0.5kVと5kVにおいて、プリドーズ倍率Mpreを変動させた場合の局所帯電電圧ΔVsを示す。ここで言うブースティングとは、対物レンズ内を電子線が高加速で通過できるように少なくとも対物レンズ内に正電圧が印加された円筒電極を配置する手法である。図14は、円筒電極に印加する電圧を0.5kVとした場合と、5kVとした場合に、プリドーズ倍率を変化させたときの表面電位を計測した結果である。ブースティング技術は例えば特開平9−171791号(USP5,872,358)に詳細に記載されている。
【0087】
局所帯電電圧ΔVsを変動させるパラメータを、試料表面電場とプリドーズ倍率とした時、ブースティング電圧Vb,リターディング電圧Vr,フィッティング係数A1およびa1、プリドーズ倍率Mpreから局所帯電電圧ΔVsは次のフィッティング関数で計算できる。
【0088】
ΔVs=A1(Vb−Vr)/Mpre+a1 (13)
また、倍率感度係数Tsを用いることによりΔVsから倍率変動量ΔM/Mobjを次式で計算できる。
【0089】
ΔM/Mobj=Ts*ΔVs (14)
図15にリターディング電位Vr=−1.2kVにおいて、ビームの照射面積(∝1/プリドーズ倍率=1/Mpre)を変動した場合の倍率変動感度係数Tsを示す。Tsはビーム照射面積に応じて4つの区間に分けることができる。50倍より低倍率ではグローバル帯電と見なせる。
【0090】
50倍から500倍までの区間はグローバル帯電から局所帯電への遷移領域にある。500倍から5000倍の区間ではほぼ一定と見なせる。5000倍より高倍率では徐々にTsが減少する傾向にある。従って、照射領域を倍率変動感度係数Tsが一定値と見なせる500倍から5000倍の倍率に相当する照射領域(一辺が10μmから300μm)に設定すれば、補正値の推定精度を保持したまま、予め記憶しておくデータ数を削減できる。
【0091】
パターンの寸法の真値と実測値をそれぞれL,Lexとすると、倍率変動量B=ΔM/Mobjは次式で計算できる。
【0092】
L/Lex=1+B (15)
式(13),式(14),式(15)を用いて、真の測長値を推定する場合、未知の係数はA1及びa1である。そのためプリドーズ倍率Mpreもしくは試料表面の電場に比例する(Vb−Vr)を変えて二度以上測定した結果を用いれば、真の測長値Lを推定することができる。
【0093】
上記の方法は、未知の絶縁体試料を観察する場合において、プリドーズ倍率Mpreもしくは試料表面の電場等を変化させて、二つ以上の異なる局所帯電電圧ΔVsで観測することにより真の測長値を推定できるという利点も持つ。また上記の方法を用いる際に、局所帯電電圧ΔVsを、式(13)に示したようなプリドーズ倍率や表面電場を帯電可変パラメータとして持つフィッティング関数ではなく入射ビームのエネルギーや照射時間及び試料内の電子及びホールの移動度等も帯電可変パラメータとして持つ別のフィッティング関数で表しても同様な効果を得ることができる。
【0094】
また、式(13)に用いられたフィッティング係数a1及びA1を記憶部に記憶しておくことにより、1つのプリドーズ倍率と表面電界における測長値を用いて真の寸法値を推定することができる。一方、式(13)に用いられたフィッティング係数a1はプリドーズ倍率や、表面電場に左右されない項である。そのため、同じ種類の試料の測長値を補正する際に用いられたa1のばらつきを式(13),式(14),式(15)に代入することによって補正に用いられたフィッティングパラメータの信頼性を測長値の偏差として評価することができる。
【0095】
図16にプリドーズ倍率に対する補正前の測長値と補正後の測長値の関係を表すグラフを示す。式(15)に従って、真の寸法値と補正前の測長値の関係から計算したプリドーズ倍率毎の倍率変動量Bを記憶しておくことにより、1つの観察条件における測長値から真の寸法値を推測することができる。
【0096】
またプリドーズを行う際に、特開2000−200579号公報に示されている最適加速電圧を用いることにより高コントラストの画像を得ることができ、より高精度の観測結果を得ることができる。
【0097】
本実施例の第1の具体例では、真の寸法値の推定手段として、局所帯電電圧を可変する帯電可変パラメータを変化させ計測した複数個の測長値を用いることにより真の寸法値を推定する機能を、図5や図6の帯電補正制御部120に持たせた例について説明する。
【0098】
図17に帯電補正制御部120の模式図を示す。帯電補正制御部120には大きくグローバル帯電補正部302と局所帯電補正部303から構成される。局所帯電補正部303は313aを介して測定条件(帯電可変パラメータ,加速電圧,プリドーズ時の一次電子照射時間)を設定する。
【0099】
設定した条件において計測した測長値を、入力装置(図示せず)から局所帯電補正部303に、313bを経由して入力する。入力された測長値と設定した測定条件から、局所帯電補正を行う倍率変動量Bを、313dを通し帯電補正統括部304に入力する。またグローバル帯電補正部302で計算された倍率変動量も313eを通り帯電補正統括部304に入力する。
【0100】
帯電補正統括部304で入力された局所帯電補正部303及びグローバル帯電補正部302のそれぞれの補正部で導出された倍率変動量からグローバル帯電と局所帯電の影響によって変動した測長値の補正を行った寸法値を出力する。
【0101】
図18に測長値を補正する場合のフローチャートを示す。まず、ステップs101で帯電可変パラメータ及び測定条件を設定する。ステップs102で、ステップs101で定めた条件に従い試料に電子ビームを照射し試料を帯電させる。ステップs103で、ステップs101、もしくはステップs109で定めた帯電可変パラメータの下で計測した測長値Lexを得る。ステップs104で、ステップs103で取得した測長値Lexから、十分な精度で測長が行えたか判断する。十分な精度で測長が行えていないと判断した場合、ステップs101で観察条件を設定しなおす。
【0102】
ステップs106でステップs107での補正に必要な複数回のデータがそろっているかを判別し、データが不足している場合はステップs109で異なる帯電可変パラメータを設定しもう一度測長する。ステップs107でステップs105において計測した測長値とステップs102及びステップs109で定めた帯電可変パラメータを用いて、測長値を補正する。ステップ108で補正した測長値をモニターに出力する。
【0103】
本実施例を用いて局所帯電補正を行えば、予備測定を行ったことのない試料の形状および材質についても異なる局所帯電電圧で二回以上測定することにより、真の寸法値を高精度に推測することができる。また、倍率毎のエネルギーフィルタを用いた予備測定が不要となるので、測定速度の向上にも効果がある。
【0104】
図19にプリドーズ倍率を変え試料に帯電させた時の試料帯電の模式図を示す。二つ以上の異なるプリドーズ倍率を用いそれぞれの倍率で測長する場合、次に示す手順を用いることにより、早く安定した局所帯電を作り出すことができる。
【0105】
試料108は、表面全体に広がるグローバル帯電電位Vgと電子照射によって引き起こされる局所帯電電圧ΔVsの二種類の帯電をしている。図19(1)においてプリドーズ倍率の小さい状態で観測した後にプリドーズ倍率を上げて観測するとき、残留帯電領域108dができる。この残留帯電領域の帯電が十分緩和するまでの緩和時間をとらなければ局所帯電補正に悪影響を及ぼす。しかし、図19(2)のようにプリドーズ倍率が大きい状態で観測した後にプリドーズ倍率を下げて観測を行えば、残留帯電領域が存在しないため、緩和時間は必要なくプリドーズ終了後すぐに測定に入れる。上記の手順を用いることで、精度の良い帯電領域の下で早く観測を行うことができる。
【0106】
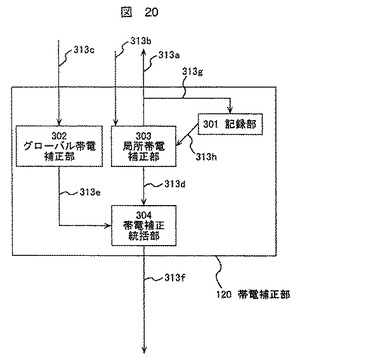
続いて本発明実施例の第2の具体例を図20及び図21を用いて説明する。本実施例では帯電補正部120内に組み込まれている記憶部301に倍率変動量Bもしくは局所帯電電圧ΔVsを表す関数のフィッティング定数のデータベースを備える。局所帯電補正部303から313aを経由して測定条件(帯電可変パラメータ,加速電圧,プリドーズ時の一次電子照射時間)を設定する。
【0107】
設定した条件において計測した測長値を局所帯電補正計算部303に313bを経由して入力する。帯電可変パラメータもしくは倍率変動量Bを、313gを経由して記憶部301へ入力する。記憶部301で入力された帯電可変パラメータに適応するΔVsと帯電可変パラメータを関連付けるフィッティング係数もしくは倍率変動量Bを、313hを経由し局所帯電補正部303に入力する。入力されたデータを用いて補正を行い計算した補正後の測長値を、313dを経由して出力する。
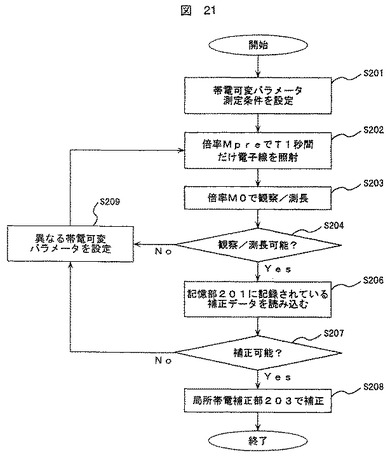
【0108】
図21に補正データを記憶している場合の測定手順のフローチャートを示す。ステップ201で帯電可変パラメータ及び測定条件を設定する。ステップ202において、ステップs201で設定した条件に従い試料に電子ビームを照射し試料を帯電させる。ステップs203で、ステップs201、もしくはステップs209で定めた帯電可変パラメータの下で計測した測長値Lexを得る。ステップs204で十分な精度で測長が行えたか判断する。十分な精度での測長が行えていないと判断した場合、ステップs209で観察条件を設定しなおす。
【0109】
ステップ206で、記憶部301から補正データとして同じ帯電可変パラメータの下で過去に導出した倍率変動率BもしくはVsを表すフィッティング関数のフィッティング係数を読み込む。ステップs207で、取得した測長値Lex、及びステップs201或いはステップs208で定めた帯電可変パラメータから、補正可能か否かを判断する。補正不可能と判断した場合、ステップs209で観察条件を設定し直す。
【0110】
ステップ208で局所帯電補正部303にステップs205で計測した測長値Lexを入力する。同時にこのデータを用いて局所帯電補正部303で補正を行い補正後の測長値を得る。
【0111】
本実施例を用いて局所帯電補正を行うことにより、一度測定をした試料の少なくとも同一パターン,同一条件部についての局所帯電補正を一つの帯電可変パラメータの下で計測した測長値から行うことができるため、測長時間の短縮を測ることができる。ステップs201で特開2000−200579号公報に示されるような最適プリドーズ条件を設定すればより高精度で安定した観測を行うことができる。
【0112】
本実施例の第3の具体例は、補正された測長値の信頼性向上のために、記憶部301に、過去に測定した同種の試料における測定条件及び倍率変動量B及びVsのフィッティング関数のフィッティング係数をデータベースとして備えた構成を説明する。
【0113】
本実施例は記憶部301に上記のデータベースを備えることにより、局所帯電補正後の測長値の精度を、補正後の測長値の偏差として定量的に評価する。この測長値の偏差から閾値を設定する。設定した閾値を超える測長値を計測した場合、異常測定を行ったと判断し、異常測定の原因が試料表面についた不純物などの影響による異常帯電の影響によるかそうでないかを判別する。
【0114】
本実施例を用いる場合の手順を次に示す。まずデータベース構築の手順を示す。試料の局所帯電電圧ΔVsを変化させ計測した同一点間の測長値から、複数個の局所帯電電圧のフィッティング係数を導出する。同様に同種の試料の異なる二点間の測長値から局所帯電電圧ΔVsのフィッティング関数のフィッティング係数を導出する。
【0115】
これを繰り返すことにより求められた複数のフィッティング係数のうち帯電可変パラメータに依存しない項のフィッティング係数a1のばらつきを抽出する。フィッティング係数a1のばらつき及びフィッティング係数a1のばらつきを測長値の偏差に直したものを記憶部301に記憶する。
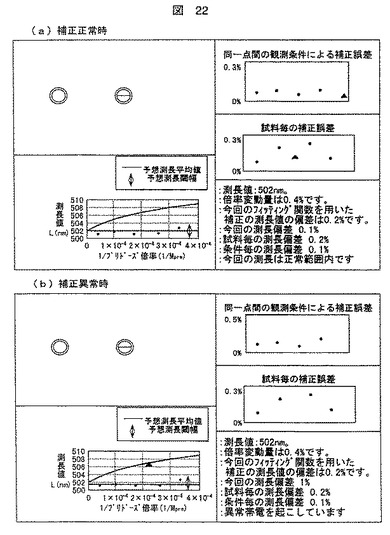
【0116】
次に構築したデータベースを用いて、異常帯電の有無を判定するための手順を次に示す。試料の交換毎もしくは測長する毎に、帯電可変パラメータを変化させ計測した測長値から導出した測長値が、記憶部301に記憶していた測長値の偏差から求められた閾値を超える時、図22(a)(b)に示す画面の表示例を表示し使用者に帯電異常の有無を知らせる。
【0117】
今回の補正に用いられたフィッティング係数a1が記憶部301に記憶されている過去に測定されたフィッティング係数a1のばらつきから求められた閾値内である場合、局所帯電は正常に行われていると推定し異常帯電が無いことを示す。
【0118】
今回の補正に用いられたフィッティング係数a1の値が記憶部301に記憶されているフィッティング係数a1のばらつきから求められた閾値を超える場合は異常帯電が生じたことを示す。本実施例を用いることにより、局所帯電の異常帯電の有無を知ることができるため高信頼度の補正後の測長値を求めることができる。
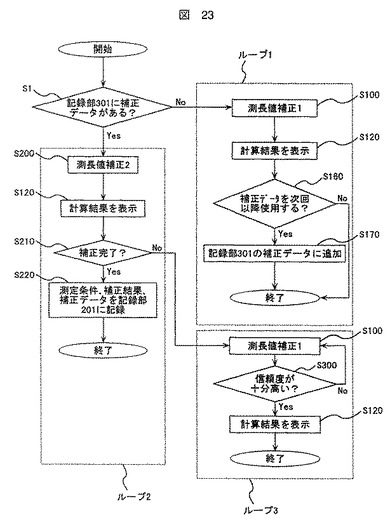
【0119】
本実施例の第4の具体例は、上記の実施例のすべてを組み合わせた機能を持つものである。本実施例のフローチャートを図23に示す。ステップs1で記憶部301に今回の観測試料に対する補正データ有無の判別を行う。記憶部301に今回の測長に必要な補正データが無い場合、ループ1のフローに入りステップs100で第1の具体例に示す処理を行うことにより補正後の測長値Lを導き出す。
【0120】
ステップs120及びステップs160で補正結果を画面に表示し、今回使用した補正データを次回以降使用するかを決定し、次回以降使用する場合ステップs170で記憶部301に補正データを記憶する。ステップs1で補正データがある場合ループ2に入り第2の具体例に示す処理を行うことにより補正後の測長値Lを導き出す。ステップs120で図22(a)(b)に示す画面に補正結果を表示する。
【0121】
ステップ210において、第3の具体例に示す評価を行い帯電異常が検出された場合に、ワーニングを表示しループ3に入り、ステップs100で複数回第1の具体例に示す手順を繰り返すことにより、複数の条件におけるフィッティング係数a1を出力する。ステップs300において、ステップs100で求めた複数個のフィッティング係数の、ばらつきの平均値を用いてフィッティング関数を作る。
【0122】
複数個のフィッティング係数a1のばらつきによる測長値の偏差から、今回作成したフィッティング関数の信頼度を評価する。フィッティング関数が信頼できると判断できなかった場合もう一度ステップs100に戻る。ステップs300で異常帯電部に対して十分信頼できるフィッティング関数を得ることができたと判断した場合、ステップs120で今回作成したフィッティング関数を用いた補正後の測長値及び測長値の偏差等の計算結果を画面に表示する。
【0123】
本実施例を用いて局所帯電補正を行うことにより、同一の絶縁体試料に刻まれた同様なパターンの測長を行う際、より高速に安定した精度で測長を行うことができる。
【0124】
本実施例の第5の具体例では、前回測定した帯電の影響を少なくするために紫外線照射装置314を備えた走査電子顕微鏡の例を説明する。図24に紫外線照射装置を備える走査電子顕微鏡の模式図を示す。
【0125】
113は測定条件等を入力するための入力装置である。紫外線照射装置314から観測ごとに紫外線を試料に照射することにより、前回測定したために蓄積された試料の帯電を初期化することができより安定した寸法の計測を行うことができる。
【0126】
本実施例によれば、絶縁物試料の像観察,寸法測定において、観察倍率の変動量が高精度に計算できる。これによって、超微細化された半導体素子製作のプロセスにおいて、短時間で高精度の寸法管理が可能となる。
【特許請求の範囲】
【請求項1】
荷電粒子線の試料上への走査に基づいて、試料から放出される荷電粒子を検出し、当該検出された荷電粒子に基づいて、前記試料上のパターン寸法を測定する試料寸法測定方法において、
前記荷電粒子線の走査によって生じる帯電電圧が異なる少なくとも2つの照射条件で、前記荷電粒子線を照射するステップと、前記照射条件の変化に対する前記帯電電圧の変化を表すフィッティング関数を形成するステップを備え、形成されたフィッティング関数に基づいて、前記パターン寸法を補正することを特徴とする試料寸法測定方法。
【請求項2】
請求項1において、
前記異なる2つの照射条件は、前記荷電粒子線の照射倍率を変化させたものであることを特徴とする試料寸法測定方法。
【請求項3】
請求項1において、
前記異なる2つの照射条件は、前記荷電粒子線の照射領域の電場を変化させたものであることを特徴とする試料寸法測定方法。
【請求項4】
荷電粒子線源と、当該荷電粒子線源から放出される荷電粒子線を走査する走査偏向器と、試料に対する前記荷電粒子線の照射に基づいて前記試料から放出される荷電粒子を検出する検出器と、当該検出器の出力に基づいて、前記試料上のパターン寸法を測定する制御装置を備えた走査荷電粒子線装置において、
前記制御装置は、前記荷電粒子線の照射条件の変化に対する前記試料上の帯電電圧の変化を示すフィッティング関数を記憶する記憶素子を備え、当該記憶されたフィッティング関数に基づいて、前記パターン寸法を補正することを特徴とする走査荷電粒子線装置。
【請求項5】
請求項4において、
前記制御装置は、前記パターン寸法を測定するときの前記荷電粒子線の照射条件に基づいて、前記フィッティング関数による計算を行うことを特徴とする走査荷電粒子線装置。
【請求項6】
請求項4において、
前記フィッティング関数は、前記試料上の電場に比例し、前記倍率に反比例するものであることを特徴とする走査荷電粒子線装置。
【請求項1】
荷電粒子線の試料上への走査に基づいて、試料から放出される荷電粒子を検出し、当該検出された荷電粒子に基づいて、前記試料上のパターン寸法を測定する試料寸法測定方法において、
前記荷電粒子線の走査によって生じる帯電電圧が異なる少なくとも2つの照射条件で、前記荷電粒子線を照射するステップと、前記照射条件の変化に対する前記帯電電圧の変化を表すフィッティング関数を形成するステップを備え、形成されたフィッティング関数に基づいて、前記パターン寸法を補正することを特徴とする試料寸法測定方法。
【請求項2】
請求項1において、
前記異なる2つの照射条件は、前記荷電粒子線の照射倍率を変化させたものであることを特徴とする試料寸法測定方法。
【請求項3】
請求項1において、
前記異なる2つの照射条件は、前記荷電粒子線の照射領域の電場を変化させたものであることを特徴とする試料寸法測定方法。
【請求項4】
荷電粒子線源と、当該荷電粒子線源から放出される荷電粒子線を走査する走査偏向器と、試料に対する前記荷電粒子線の照射に基づいて前記試料から放出される荷電粒子を検出する検出器と、当該検出器の出力に基づいて、前記試料上のパターン寸法を測定する制御装置を備えた走査荷電粒子線装置において、
前記制御装置は、前記荷電粒子線の照射条件の変化に対する前記試料上の帯電電圧の変化を示すフィッティング関数を記憶する記憶素子を備え、当該記憶されたフィッティング関数に基づいて、前記パターン寸法を補正することを特徴とする走査荷電粒子線装置。
【請求項5】
請求項4において、
前記制御装置は、前記パターン寸法を測定するときの前記荷電粒子線の照射条件に基づいて、前記フィッティング関数による計算を行うことを特徴とする走査荷電粒子線装置。
【請求項6】
請求項4において、
前記フィッティング関数は、前記試料上の電場に比例し、前記倍率に反比例するものであることを特徴とする走査荷電粒子線装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【公開番号】特開2013−92530(P2013−92530A)
【公開日】平成25年5月16日(2013.5.16)
【国際特許分類】
【出願番号】特願2012−286603(P2012−286603)
【出願日】平成24年12月28日(2012.12.28)
【分割の表示】特願2011−154407(P2011−154407)の分割
【原出願日】平成14年7月10日(2002.7.10)
【出願人】(000005108)株式会社日立製作所 (27,607)
【Fターム(参考)】
【公開日】平成25年5月16日(2013.5.16)
【国際特許分類】
【出願日】平成24年12月28日(2012.12.28)
【分割の表示】特願2011−154407(P2011−154407)の分割
【原出願日】平成14年7月10日(2002.7.10)
【出願人】(000005108)株式会社日立製作所 (27,607)
【Fターム(参考)】
[ Back to top ]