
電子機器、測位デバイス、情報処理方法およびプログラム
【課題】消費電力を削減するとともに適切な測位を行う。
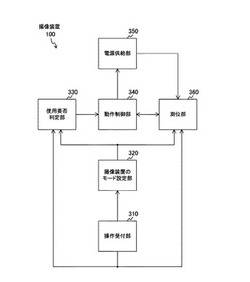
【解決手段】使用要否判定部330は、ユーザによる操作入力に基づく処理が、測位部360により取得される測位情報を用いる特定処理であるか否かを判定する。この特定処理は、撮像部により生成された画像データに、測位部360により算出される位置情報を関連付けて記録する撮影モードである。動作制御部340は、使用要否判定部330による判定結果と、測位部360における動作内容に基づいて測位部360の動作停止制御を行う。例えば、操作入力に基づく処理が特定処理である場合には、測位部360に電源が供給される。また、操作入力に基づく処理が特定処理でなく測位部360がエフェメリスデータ取得を目的とする動作または衛星捕捉を目的とする動作を行っている場合には、その動作が終了するまでの間、測位部360が動作を継続できるよう制御を行う。
【解決手段】使用要否判定部330は、ユーザによる操作入力に基づく処理が、測位部360により取得される測位情報を用いる特定処理であるか否かを判定する。この特定処理は、撮像部により生成された画像データに、測位部360により算出される位置情報を関連付けて記録する撮影モードである。動作制御部340は、使用要否判定部330による判定結果と、測位部360における動作内容に基づいて測位部360の動作停止制御を行う。例えば、操作入力に基づく処理が特定処理である場合には、測位部360に電源が供給される。また、操作入力に基づく処理が特定処理でなく測位部360がエフェメリスデータ取得を目的とする動作または衛星捕捉を目的とする動作を行っている場合には、その動作が終了するまでの間、測位部360が動作を継続できるよう制御を行う。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、電子機器に関し、特に、測位情報を扱う電子機器、測位デバイスおよびこれらにおける処理方法ならびに当該方法をコンピュータに実行させるプログラムに関する。
【背景技術】
【0002】
近年、人物や風景等の被写体を撮像して画像データを生成し、この生成された画像データを画像コンテンツ(画像ファイル)として記録するデジタルスチルカメラ、デジタルビデオカメラ(例えば、カメラ一体型レコーダ)等の撮像装置が普及している。また、生成された画像データに、その撮像時における位置に関する位置情報を関連付けて記録することが可能な撮像装置が提案されている。例えば、GPS(Global Positioning System)デバイスを備え、このGPSデバイスにより取得された位置情報を、生成された画像データに関連付けて記録する撮像装置が提案されている。
【0003】
また、近年では、ユーザが容易に携帯することができる小型の撮像装置が普及している。このような携帯可能な撮像装置は、バッテリ駆動により動作するものが多く、その動作時間を長くすることが重要となる。このため、GPSデバイスによる位置情報の取得についても、消費電力を抑制する方法が提案されている。
【0004】
ここで、GPSデバイスにより位置情報を取得する場合には、GPSデバイスに保持されている情報(軌道情報(エフェメリス(Ephemeris)データ)、時刻情報等)に応じて、測位に要する時間が異なる。例えば、GPSデバイスがエフェメリスデータおよび時刻情報を保持している場合には、GPSデバイスは、保持されている情報を用いてホットスタート(Hot Start)により起動して測位を行うことができる。一方、GPSデバイスがエフェメリスデータを保持していない場合には、GPSデバイスは、保持されている情報を用いてコールドスタート(Cold Start)またはウォームスタート(Warm Start)により起動して測位を行う。すなわち、エフェメリスデータを保持していないが時刻情報を保持している場合には、GPSデバイスは、ウォームスタートにより起動して測位を行う。また、エフェメリスデータおよび時刻情報の何れも保持していない場合には、GPSデバイスは、コールドスタートにより起動して測位を行う。
【0005】
なお、ホットスタートは、起動から測位までに要する時間が比較的短い(数秒程度)のに対して、コールドスタートまたはウォームスタートは、起動から測位までに要する時間が比較的長くなる(30秒以上)。このため、GPSデバイスの起動後、速やかに位置情報を取得したい場合には、ホットスタートにより起動することができる状態を維持することが重要である。しかしながら、エフェメリスデータの有効時間は4時間とされている。ただし、約2時間で同じ地点から見える衛星が変わることから、一般にエフェメリスデータの有効時間は2時間とされている。
【0006】
そこで、例えば、撮影頻度を監視して、この撮影頻度に基づいて、GPSデバイスに対する電源供給を制御する情報処理装置が提案されている(例えば、特許文献1参照。)。この情報処理装置は、例えば、撮影頻度が予め定めた閾値未満である場合には、GPSデバイスに対する間欠的な電源供給を行い、撮影頻度が予め定めた閾値以上である場合には、GPSデバイスに対する継続的な電源供給を行う。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開2007−155577号公報(図1)
【発明の概要】
【発明が解決しようとする課題】
【0008】
上述の従来技術によれば、GPSデバイスにおける無駄な電力消費を防止してバッテリの消費を抑え、迅速に位置情報を取得することができる。
【0009】
ここで、例えば、撮像装置により静止画の撮影が行われる場合には、撮影毎に電源のオン/オフが繰り返し行われることが想定される。例えば、静止画の撮影を行う場合には、撮像装置の電源をオンして所望の場所で1または複数枚の静止画の撮影を行い、この撮影の直後に撮像装置の電源をオフすることが想定される。このため、例えば、1日に複数の観光地を巡る旅行に行った場合には、静止画の撮影が継続して行われるとともに、撮像装置の電源のオン/オフ操作が繰り返し行われることが想定される。
【0010】
しかしながら、上述の従来技術では、撮影頻度が予め定めた閾値未満である場合には、ユーザによる撮影行為が継続されていないと判定されるまでの間、撮像装置の電源のオン/オフ状態とは独立して、GPSデバイスが間欠的な測位動作を行う。このため、撮像装置の電源がオフ状態とされている場合でも、GPSデバイスが間欠的な測位動作を行う。この場合には、撮像装置の電源がオフ状態とされているにもかかわらず、GPSデバイスによる間欠的な測位動作により電力が消費されることになる。また、撮像装置の電源がオン状態とされている場合でも、GPSデバイスによる測位動作が行われないことも想定される。そこで、撮像装置の電源がオフ状態とされている場合等のようにGPSデバイスを用いない場合における消費電力を削減するとともに、撮像装置の使用時には適切な測位を行うことが重要である。
【0011】
本発明はこのような状況に鑑みてなされたものであり、消費電力を削減するとともに、適切な測位を行うことを目的とする。
【課題を解決するための手段】
【0012】
本発明は、上記課題を解決するためになされたものであり、その第1の側面は、測位処理のために必要な測位情報を外部から受信する受信部と、ユーザによる操作入力が受け付けられた場合に当該操作入力に基づく処理が上記測位情報を用いる特定処理であるか否かを判定する判定部と、上記判定部による判定結果および上記受信部の動作内容に基づいて上記受信部の動作制御を行う制御部とを具備する電子機器およびその情報処理方法ならびに当該方法をコンピュータに実行させるプログラムである。これにより、ユーザ操作により受け付けられた操作入力に基づく処理が特定処理であるか否かを判定し、この判定結果および受信部の動作内容に基づいて、受信部の動作制御を行うという作用をもたらす。
【0013】
また、この第1の側面において、上記制御部は、上記操作入力に基づく処理が上記特定処理であると上記判定部により判定された場合には上記受信部を動作させるように制御を行い、上記操作入力に基づく処理が上記特定処理でないと上記判定部により判定された場合において、上記受信部が特定動作を行う第1のモードである場合には当該特定動作が終了するまで上記受信部を上記第1のモードにて動作させるように制御を行い当該特定動作の終了後に上記受信部の動作を上記第1のモードよりも消費電力が小さい第2のモードに遷移させるように制御を行い、上記受信部が上記第1のモードでない場合には上記受信部を上記第2のモードに遷移させるように制御を行うようにしてもよい。これにより、操作入力に基づく処理が特定処理であると判定された場合には受信部を動作させるように制御を行い、操作入力に基づく処理が特定処理でないと判定された場合において、受信部が第1のモードである場合にはその特定動作が終了するまで受信部を第1のモードにて動作させるように制御を行いその特定動作の終了後に受信部の動作を第2のモードに遷移させるように制御を行い、受信部が第1のモードでない場合には受信部を第2のモードに遷移させるように制御を行うという作用をもたらす。
【0014】
また、この第1の側面において、上記制御部は、上記操作入力に基づく処理が上記特定処理であると上記判定部により判定された場合には上記受信部を動作させるように制御を行い、上記操作入力に基づく処理が上記特定処理でないと上記判定部により判定された場合には上記受信部の動作内容に基づいて上記受信部の動作停止制御を行うようにしてもよい。これにより、操作入力に基づく処理が特定処理であると判定された場合には、受信部を動作させるように制御を行い、操作入力に基づく処理が特定処理でないと判定された場合には、受信部の動作内容に基づいて、受信部の動作停止制御を行うという作用をもたらす。
【0015】
また、この第1の側面において、上記制御部は、上記操作入力に基づく処理が上記特定処理でないと上記判定部により判定された場合において、上記受信部が特定動作を行っている場合には当該特定動作が終了するまで上記受信部を動作させるように制御を行い当該特定動作の終了後に上記受信部の動作を停止させるように制御を行い、上記受信部が上記特定動作を行っていない場合には上記受信部の動作を停止させるように制御を行うようにしてもよい。これにより、操作入力に基づく処理が特定処理でないと判定された場合において、受信部が特定動作を行っている場合には、その特定動作が終了するまで受信部を動作させるように制御を行いその特定動作の終了後に受信部の動作を停止させるように制御を行い、受信部が特定動作を行っていない場合には、受信部の動作を停止させるように制御を行うという作用をもたらす。
【0016】
また、この第1の側面において、上記受信部を、GPSにより上記測位情報を取得するGPSシステムにより構成し、上記特定動作を、エフェメリスデータを取得することを目的とする動作またはGPS衛星を捕捉することを目的とする動作の何れかとするようにしてもよい。これにより、GPSシステムにおける動作内容に基づいて、GPSシステムの動作制御を行うという作用をもたらす。
【0017】
また、この第1の側面において、上記受信部は、エフェメリスデータを取得することを目的とする動作を行うエフェメリスデータ取得モードと、GPS衛星を捕捉することを目的とする動作を一定間隔毎に間欠的に行う衛星捕捉モードと、上記測位情報に基づいて算出される位置情報の更新を行うことを目的とする動作を一定間隔毎に間欠的に行う位置更新モードとの何れかの動作モードが設定され、上記制御部は、上記操作入力に基づく処理が上記特定処理でないと上記判定部により判定された場合において、上記位置更新モードが設定されている場合には上記受信部の動作を停止させるように制御を行い、上記エフェメリスデータ取得モードまたは上記衛星捕捉モードが設定されている場合には当該設定されているモードに係る上記特定動作が終了するまで上記受信部を動作させるように制御を行い当該特定動作の終了後に上記受信部の動作を停止させるように制御を行うようにしてもよい。これにより、操作入力に基づく処理が特定処理でないと判定された場合において、位置更新モードが設定されている場合には、受信部の動作を停止させるように制御を行い、エフェメリスデータ取得モードまたは衛星捕捉モードが設定されている場合には、その設定されているモードに係る特定動作が終了するまで受信部を動作させるように制御を行いその特定動作の終了後に受信部の動作を停止させるように制御を行うという作用をもたらす。
【0018】
また、この第1の側面において、上記制御部は、上記操作入力に基づく処理が上記特定処理でないと上記判定部により判定され、上記衛星捕捉モードが設定されている場合において、GPS衛星を捕捉することを目的とする動作が実行されている場合には当該衛星捕捉動作が終了するまで上記受信部を動作させるように制御を行い当該衛星捕捉動作の終了後に上記受信部の動作を停止させるように制御を行い、GPS衛星を捕捉することを目的とする動作が実行されていない場合には上記受信部の動作を停止させるように制御を行うようにしてもよい。これにより、操作入力に基づく処理が特定処理でないと判定され、衛星捕捉モードが設定されている場合において、衛星捕捉動作が実行されている場合には、その衛星捕捉動作が終了するまで受信部を動作させるように制御を行いその衛星捕捉動作の終了後に受信部の動作を停止させるように制御を行い、衛星捕捉動作が実行されていない場合には、受信部の動作を停止させるように制御を行うという作用をもたらす。
【0019】
また、この第1の側面において、上記制御部は、上記操作入力に基づく処理が上記特定処理でないと上記判定部により判定され、上記衛星捕捉モードが設定されている場合において、GPS衛星を捕捉することを目的とする動作の終了時にエフェメリスデータの取得基準を満たしている場合には上記エフェメリスデータ取得モードに遷移してエフェメリスデータを取得することを目的とする動作が終了するまで上記受信部を動作させるように制御を行い当該取得動作の終了後に上記受信部の動作を停止させるように制御を行うようにしてもよい。これにより、操作入力に基づく処理が特定処理でないと判定され、衛星捕捉モードが設定されている場合において、その衛星捕捉動作の終了時にエフェメリスデータの取得基準を満たしている場合には、エフェメリスデータ取得モードに遷移してその取得動作が終了するまで受信部を動作させるように制御を行いその取得動作の終了後に受信部の動作を停止させるように制御を行うという作用をもたらす。
【0020】
また、この第1の側面において、被写体を撮像して画像データを生成する撮像部をさらに具備し、上記特定処理を、上記撮像部により生成された画像データに上記受信部により取得された上記測位情報に基づいて算出される位置情報を関連付けて記録する処理とするようにしてもよい。これにより、操作入力に基づく処理が、撮像部により生成された画像データに受信部により算出される位置情報を関連付けて記録する処理であるか否かに基づいて、受信部への電源供給の制御を行うという作用をもたらす。
【0021】
また、この第1の側面において、上記特定処理を行うための撮影モードから上記特定処理以外の処理を行うための他のモードへの切替操作、または、上記他のモードから上記撮影モードへの切替操作を上記操作入力として受け付ける操作受付部をさらに具備し、上記判定部は、上記撮影モードから上記他のモードへの切替操作が上記操作入力として受け付けられた場合には当該操作入力に基づく処理が上記特定処理でないと判定し、上記他のモードから上記撮影モードへの切替操作が上記操作入力として受け付けられた場合には当該操作入力に基づく処理が上記特定処理であると判定するようにしてもよい。これにより、撮影モードから他のモードへの切替操作が受け付けられた場合には、その操作入力に基づく処理が特定処理でないと判定し、他のモードから撮影モードへの切替操作が受け付けられた場合には、その操作入力に基づく処理が特定処理であると判定するという作用をもたらす。
【0022】
また、この第1の側面において、上記電子機器の電源をオフする電源オフ操作を上記操作入力として受け付ける操作受付部をさらに具備し、上記判定部は、上記電源オフ操作が上記操作入力として受け付けられた場合には当該操作入力に基づく処理が上記特定処理でないと判定するようにしてもよい。これにより、電源オフ操作が受け付けられた場合には、その操作入力に基づく処理が特定処理でないと判定するという作用をもたらす。
【0023】
また、この第1の側面において、電源供給線を介して上記受信部に主電源を供給する電源供給部と、上記電源供給線におけるオン/オフを切り替える切替部および制御信号線によるオン/スタンバイを切り替える切替部のうちの少なくとも1つの切替部とをさらに具備し、上記制御部は、上記切替部を制御することにより上記受信部の動作制御を行うようにしてもよい。これにより、切替部を制御することにより受信部の動作制御を行うという作用をもたらす。
【0024】
また、本発明の第2の側面は、測位処理のために必要な測位情報を外部から受信する受信部と、電子機器における状態が変化した場合に当該変化後の状態において行われる処理が上記測位情報を用いる特定処理であるか否かを判定する判定部と、上記判定部による判定結果および上記受信部の動作内容に基づいて上記受信部の動作制御を行う制御部とを具備する電子機器およびその情報処理方法ならびに当該方法をコンピュータに実行させるプログラムである。これにより、電子機器における状態が変化した場合に、その変化後の状態において行われる処理が特定処理であるか否かを判定し、この判定結果および受信部の動作内容に基づいて、受信部の動作制御を行うという作用をもたらす。
【0025】
また、この第2の側面において、上記判定部は、上記変化後の状態が待機状態となった場合には当該変化後の状態において行われる処理が上記特定処理でないと判定し、上記制御部は、上記変化後の状態において行われる処理が上記特定処理であると上記判定部により判定された場合には上記受信部を動作させるように制御を行い、上記変化後の状態において行われる処理が上記特定処理でないと上記判定部により判定された場合には上記受信部の動作内容に基づいて上記受信部の動作停止制御を行うようにしてもよい。これにより、変化後の状態が待機状態(例えば、スタンバイ状態)となった場合には、その変化後の状態において行われる処理が特定処理でないと判定し、変化後の状態において行われる処理が特定処理であると判定された場合には、受信部を動作させるように制御を行い、変化後の状態において行われる処理が特定処理でないと判定された場合には、受信部の動作内容に基づいて受信部の動作停止制御を行うという作用をもたらす。
【0026】
また、本発明の第3の側面は、測位処理のために必要な測位情報を外部から受信する受信部と、ユーザによる操作入力が受け付けられた場合に当該操作入力に基づく処理が上記測位情報を用いる特定処理であるか否かを示す所定情報を取得する取得部と、上記取得された所定情報および当該所定情報の取得時における動作内容に基づいて動作を行うか否かの制御を行う制御部とを具備する測位デバイスおよびその情報処理方法ならびに当該方法をコンピュータに実行させるプログラムである。これにより、ユーザ操作により受け付けられた操作入力に基づく処理が特定処理であるか否かを示す所定情報(例えば、判定結果)を取得し、この所定情報およびこの取得時における動作内容に基づいて動作を行うか否かの制御を行うという作用をもたらす。
【発明の効果】
【0027】
本発明によれば、消費電力を削減するとともに、適切な測位を行うことができるという優れた効果を奏し得る。
【図面の簡単な説明】
【0028】
【図1】本発明の第1の実施の形態における撮像装置100の内部構成例を示すブロック図である。
【図2】本発明の第1の実施の形態におけるGPSモジュール120により取得される航法メッセージの構造を模式的に示す図である。
【図3】本発明の第1の実施の形態におけるGPSモジュール120の内部構成例を示す図である。
【図4】本発明の第1の実施の形態における電源制御論理回路122の制御内容を模式的に示す図である。
【図5】本発明の第1の実施の形態における撮像装置100の機能構成例を示すブロック図である。
【図6】本発明の第1の実施の形態における表示部160の表示例を示す図である。
【図7】本発明の第1の実施の形態における動作制御部340により測位部360の動作制御を行う場合を示すシーケンスチャートである。
【図8】本発明の第1の実施の形態における動作制御部340により測位部360の動作制御を行う場合を示すシーケンスチャートである。
【図9】本発明の第1の実施の形態における撮像装置100による測位処理の処理手順の一例を示すフローチャートである。
【図10】本発明の第1の実施の形態における撮像装置100による測位処理の処理手順の一例を示すフローチャートである。
【図11】本発明の第2の実施の形態におけるGPSモジュール600の内部構成例を示す図である。
【図12】本発明の第2の実施の形態における電源制御論理回路620の制御内容を模式的に示す図である。
【図13】本発明の第3の実施の形態における表示部160の表示例を示す図である。
【図14】本発明の第3の実施の形態における撮像装置100による測位処理の処理手順の一例を示すフローチャートである。
【図15】本発明の第1の実施の形態の変形例におけるGPSモジュール500の内部構成例を示す図である。
【図16】本発明の第1の実施の形態の変形例におけるGPSモジュール540の内部構成例を示す図である。
【図17】本発明の第1の実施の形態の変形例におけるGPSモジュール550の内部構成例を示す図である。
【図18】本発明の第1の実施の形態の変形例におけるGPSモジュール560の内部構成例を示す図である。
【図19】本発明の第1の実施の形態の変形例におけるGPSモジュール570の内部構成例を示す図である。
【図20】本発明の第1の実施の形態の変形例におけるGPSモジュール580の内部構成例を示す図である。
【発明を実施するための形態】
【0029】
以下、本発明を実施するための形態(以下、実施の形態と称する)について説明する。説明は以下の順序により行う。
1.第1の実施の形態(測位部の動作制御:ユーザ操作に基づく処理が測位情報を用いるか否かと、測位部における動作モードとに基づいて測位部の動作を制御する例)
2.第2の実施の形態(測位部の動作制御:間欠動作の間欠中に測位部をスタンバイ状態とする例)
3.第3の実施の形態(測位部の動作制御:予測エフェメリスデータを用いて位置更新を行う例)
4.変形例
【0030】
<1.第1の実施の形態>
[撮像装置の構成例]
図1は、本発明の第1の実施の形態における撮像装置100の内部構成例を示すブロック図である。撮像装置100は、撮像部111と、記録再生部112と、記録媒体113と、GPSモジュール120と、ホスト制御部130と、主電源IC(Integrated Circuit)131とを備える。また、撮像装置100は、ROM(Read Only Memory)141と、RAM(Random Access Memory)142と、操作受付部150と、操作受付I/F(インターフェース)部151とを備える。また、撮像装置100は、表示部160と、表示制御部161と、メモリカード170と、メモリI/F部171と、通信I/F部180とを備える。なお、撮像装置100を構成する各部の間で行われるやりとりは、主にバス190を介して行われる。また、撮像装置100は、例えば、GPSデバイスを備え、このGPSデバイスにより取得された位置情報を、生成された画像データに付加して記録することが可能なデジタルスチルカメラにより実現することができる。また、撮像装置100は、特許請求の範囲に記載の電子機器の一例である。
【0031】
撮像部111は、レンズ(図示せず)を介して入射された被写体の光を電気信号に変換する撮像素子(図示せず)と、この撮像素子の出力信号を処理して画像データ(撮像画像)を生成する信号処理部(図示せず)とを備える。すなわち、撮像部111において、レンズを介して入射された被写体の光学像が撮像素子の撮像面に結像され、この状態で撮像素子が撮像動作を行い、信号処理部が撮像信号に対して信号処理を行うことにより、画像データが生成される。この画像データの生成は、撮影モードが設定されている場合において、操作受付部150により受け付けられた撮像動作の開始指示情報に基づいて行われる。そして、生成された画像データが記録再生部112に順次供給される。
【0032】
記録再生部112は、コーデックおよび記録再生I/Fを備え、撮像部111から供給された画像データを画像ファイル(静止画ファイルまたは動画ファイル)として記録媒体113に記録させるものである。この記録時に、GPSモジュール120により取得された位置情報(最後に取得された位置情報)と、その記録時における日時情報とを含む属性情報が画像ファイルに記録される。この属性情報には、例えば、撮像時における各種情報(例えば、F値、ISO)を含めることができる。また、記録再生部112は、その記録された画像ファイルに関する画像管理情報を画像管理ファイルに記録させる。
【0033】
記録媒体113は、画像ファイル等の各データを記憶するものであり、記憶されている各データを記録再生部112に供給する。なお、記録媒体113に記憶されている画像ファイルは、例えば、Exif(Exchangeable image file format)規格の静止画ファイルである。また、この静止画ファイルの属性情報として位置情報、日時情報等が記録される。
【0034】
GPSモジュール120は、バッテリ200からの電源供給を受けて測位処理を行うものである。具体的には、GPSモジュール120は、GPSアンテナ(図示せず)により受信された複数のGPS衛星からの衛星信号を復調部(図示せず)により復調することにより航法メッセージ(図2に示す)を取得する。そして、GPSモジュール120は、取得された航法メッセージからエフェメリスデータを抽出して、この抽出されたエフェメリスデータを保持する。また、GPSモジュール120は、アルマナックデータ等についても同様に抽出して保持する。なお、エフェメリスデータは、各GPS衛星の正確な位置情報と信号を発射した時刻情報とに関するデータであり、アルマナックデータは、軌道上における全てのGPS衛星に関する軌道情報である。また、GPSモジュール120は、保持されているエフェメリスデータ等の測位情報を用いて測位処理を行うことにより現在位置を示す位置情報を算出し、この算出された位置情報を保持するとともに、ホスト制御部130に出力する。この測位情報は、位置情報の算出に用いられる各情報(GPS衛星から取得した各情報やこれらに基づいて取得された情報等であり、例えば、上述の航法メッセージを含む。)である。また、この測位情報は、GPSモジュール120のGPSアンテナまたは他の通信部(有線または無線通信手段(図示せず))により取得されるデータである。なお、算出された位置情報には、緯度、経度、高度等の位置に関する各データが含まれる。なお、GPSモジュール120の内部構成については、図3を参照して詳細に説明する。また、GPSモジュール120は、特許請求の範囲に記載の測位デバイスの一例である。
【0035】
ホスト制御部130は、ROM141に記憶されている各種制御プログラムに基づいて、撮像装置100における各処理(例えば、撮像画像生成処理、撮像画像記録処理、画像再生処理、通信処理)を行うものである。また、ホスト制御部130は、操作受付部150により受け付けられた操作入力等に基づいて撮像装置100の各部を制御する。
【0036】
ROM141は、読み出し専用のメモリであり、各種制御プログラム等を記憶するものである。
【0037】
RAM142は、ホスト制御部130のメインメモリ(主記憶装置)として用いられるメモリであり、ホスト制御部130において実行されるプログラムの作業領域等を備える。
【0038】
操作受付部150は、ユーザにより操作された操作内容を受け付ける操作受付部であり、受け付けられた操作内容に応じた信号を、操作受付I/F部151を介してホスト制御部130に出力する。例えば、撮像装置100の電源のオン/オフを行うための電源ボタンやシャッターボタン152(図6に示す)が撮像装置100に設けられている。
【0039】
表示部160は、表示制御部161の制御に基づいて、各種情報を表示する表示部である。表示部160として、例えば、LCD(Liquid Crystal Display)、有機EL(Electro Luminescence)パネル等を用いることができる。なお、操作受付部150および表示部160については、指等で触ることにより各種操作を行うことが可能なタッチパネルにより一体で構成するようにしてもよい。
【0040】
表示制御部161は、操作受付部150により受け付けられたユーザ操作およびホスト制御部130の制御に基づいて、各種情報を表示部160に表示させるものである。
【0041】
メモリカード170は、各種のデータ、プログラム等の記憶部として利用される記録媒体である。例えば、メモリI/F部171を介して供給された画像データが画像ファイルとしてメモリカード170に記録される。また、メモリカード170に記憶されている画像データは、操作受付部150により受け付けられたユーザからの操作入力に応じて、メモリI/F部171を介して読み出され、各部に供給される。
【0042】
通信I/F部180は、USB(Universal Serial Bus)等の入出力端子を備える通信インターフェースであり、外部コンピュータとの接続やネットワーク接続のためのインターフェースを提供する。なお、通信I/F部180として、有線および無線の何れのインターフェースを用いるようにしてもよい。
【0043】
バッテリ200は、撮像装置100の主電源であり、主電源IC131を介して各部に電源を供給する。また、バッテリ200は、GPSモジュール120に電源を供給する。
【0044】
ここで、本発明の第1の実施の形態では、撮像装置100において撮影モード、再生モード、通信モードおよび各種設定モードの何れかのモードがユーザ操作により設定されるものとする。撮影モードは、例えば、撮像部111により生成された画像データを静止画ファイルまたは動画ファイルとして記録媒体113またはメモリカード170に記録させる場合に設定されるモードである。なお、撮影モードでは、記録された画像データをプレビュー表示させることもできる。再生モードは、例えば、記録媒体113またはメモリカード170に記憶されている各データを表示部160に表示させる場合に設定されるモードである。通信モードは、例えば、通信I/F部180を介して撮像装置100と外部装置との間で各種通信を行う場合に設定されるモードである。各種設定モードは、例えば、メニュー画面において各種設定変更を行うためのモードである。
【0045】
また、本発明の第1の実施の形態では、撮影モードが設定されている場合には、GPSモジュール120の電源をオン状態とする。一方、撮影モード以外のモード(再生モード、通信モードまたは各種設定モード)が設定されている場合には、GPSモジュール120の電源をオフ状態、または、GPSモジュール120をスタンバイモードとする。なお、GPSモジュールのスタンバイモードについては、本発明の第2の実施の形態で説明する。また、例えば、撮影モードが設定されている場合において、他のモードに切り替える切替操作がされた場合、または、撮像装置100の電源がオフされた場合には、一定条件により、GPSモジュール120の電源を一定時間オン状態とする。これらの各制御については、図3乃至図8等を参照して詳細に説明する。
【0046】
[航法メッセージの構造]
図2は、本発明の第1の実施の形態におけるGPSモジュール120により取得される航法メッセージの構造を模式的に示す図である。この航法メッセージは、測距信号に乗せられて各GPS衛星から送信されるデータである。
【0047】
航法メッセージの1サイクルは、フレームという単位で称され、5組のサブフレームにより1フレームが構成されている。具体的には、航法メッセージは、サブフレーム#1(251)乃至#5(255)により1フレーム(1500ビット)が構成されている。なお、サブフレーム#1(251)乃至#5(255)は300ビットのサイズである。また、航法メッセージのデータ速度は、約50bps(Bits Per Second)であり、サブフレーム#1(251)から順番に送信が開始され、サブフレーム#5(255)の送信が終了すると、サブフレーム#1(251)の送信が再び開始される。すなわち、航法メッセージは、1フレームが30秒間繰り返し送信される。
【0048】
また、サブフレーム#1(251)乃至#3(253)は、衛星信号を送信しているGPS衛星の固有情報を含むサブフレームであり、30秒間隔で同じ内容が繰り返し送信される。具体的には、サブフレーム#1(251)には、GPS衛星の状態、クロック補正に関する情報が含まれ、サブフレーム#2(252)および#3(253)には、GPS衛星の軌道情報(エフェメリスデータ)が含まれる。
【0049】
エフェメリスデータは、GPS衛星がどのような軌道で周回しているかを示す詳細な軌道情報である。GPSモジュール120が、現在位置を正確に測位するためには、少なくとも4個のGPS衛星からエフェメリスデータを取得しておく必要がある。しかしながら、エフェメリスデータの有効時間は4時間とされている。ただし、約2時間で同じ地点から見えるGPS衛星が変わることから、一般にエフェメリスデータの有効時間は2時間とされている。そして、GPSモジュール120は、有効なエフェリメスデータと時刻情報を用いて、比較的短時間(例えば、3秒乃至5秒程度)で測位を行うことができる。具体的には、GPSモジュール120は、エフェメリスデータおよび4個のGPS衛星から撮像装置100までの距離データに基づいて、撮像装置100の現在位置を測位して、現在位置を示す位置情報を算出する。そして、GPSモジュール120は、その算出された位置情報を保持するとともに、ホスト制御部130に出力する。
【0050】
しかしながら、保持されているエフェリメスデータの有効時間が経過した場合には、新たにエフェリメスデータを取得する必要がある。ここで、上述したように、GPS衛星から約30秒周期でエフェメリスデータが送信されるため、新たなエフェリメスデータを取得するためには、最低でも30秒間以上の時間が必要である。
【0051】
また、サブフレーム#4(254)および#5(255)は、全てのGPS衛星に関する情報を含むサブフレームであり、全てのGPS衛星から同じ内容が送信される。なお、サブフレーム#4(254)および#5(255)には、全てのGPS衛星の概略衛星情報(アルマナックデータ)や電離層補正情報等が含まれる。また、サブフレーム#4(254)および#5(255)に含まれるデータ量が多いため、各データが1乃至25頁に分割されて格納される。すなわち、フレーム毎に異なる内容の頁(1乃至25頁)が順番に送信される。このため、サブフレーム#4(254)および#5(255)に含まれる全てのデータをGPS衛星から取得する場合には、12分30秒(30秒×25)を要する。
【0052】
なお、サブフレーム#4(254)には、電離層補正情報、協定世界時(UTC(Coordinated Universal Time)、概略衛星情報(アルマナックデータ)が含まれる。また、サブフレーム#5(255)には、概略衛星情報(アルマナックデータ)が含まれる。なお、アルマナックデータは、エフェメリスデータと比較すると精度が低いデータであるが、比較的古いデータでも用いることができる。例えば、数週間前のアルマナックデータでも有効である場合が多い。
【0053】
[GPSモジュールの構成例]
図3は、本発明の第1の実施の形態におけるGPSモジュール120の内部構成例を示す図である。図3では、図1に示すホスト制御部130およびバッテリ200を図示し、これらとGPSモジュール120との関係を模式的に示す。
【0054】
図4は、本発明の第1の実施の形態における電源制御論理回路122の制御内容を模式的に示す図である。図4に示す電源制御論理回路122の制御内容については、図3を参照して詳細に説明する。
【0055】
GPSモジュール120は、GPS制御部121と、電源制御論理回路122と、電源スイッチ123と、通信分離回路124とを備える。
【0056】
バッテリ200は、GPSモジュール120およびホスト制御部130に電源を供給するバッテリである。具体的には、バッテリ200は、電源供給線201、主電源IC131を介してホスト制御部130に電源(主電源)を供給し、電源供給線202、203を介してGPS制御部121に電源(主電源)を供給する。また、電源供給線202、203は、他のシステムとは異なった電源シーケンスが必要となるため、GPSモジュール120用の独立した電源供給線とする。
【0057】
GPS制御部121は、GPSモジュール120を制御する制御回路であり、RTC(Real Time Clock)125および位置演算プロセッサ128を内蔵する。また、GPS制御部121は、通信分離回路124を介してホスト制御部130との間で各種通信を行う。また、GPS制御部121は、ホスト制御部130からの制御に基づいて、不揮発性メモリ等のメモリ(図示せず)に記憶されている各種制御プログラムに従って測位処理を行う。この測位処理は、例えば、エフェメリスデータ取得モード、衛星捕捉モード、位置更新モードにおける各処理である。
【0058】
ここで、エフェメリスデータ取得モードは、GPS衛星から航法メッセージを取得し、この取得された航法メッセージからエフェメリスデータを抽出することを目的とする動作モードである。この動作では、航法メッセージの受信、GPS衛星の特定、衛星情報のホスト制御部130への送信等を行い、測位終了となった場合には位置情報をホスト制御部130に送信する。なお、エフェメリスデータ取得モードでは、エフェメリスデータとともに、測位に用いる他の情報についても抽出される。
【0059】
また、衛星捕捉モードは、GPS衛星からの衛星信号を探索し、上空に存在するGPS衛星を特定することを目的とする間欠動作モードである。この間欠動作時間は、コールドスタートしてから現在の状況において測位可能かを判断するために十分な時間とする。このため、間欠動作では、例えば、10秒から20秒程度の動作時間を必要とし、動作時間が比較的長い間欠動作モードとなる。また、この間欠動作では、航法メッセージの受信、GPS衛星の特定、衛星情報のホスト制御部130への送信等を行い、測位終了となった場合には位置情報をホスト制御部130に送信する。なお、本発明の第1の実施の形態では、GPS信号を捕捉してGPS衛星を特定することを「GPS衛星を捕捉する」と表現して説明する。
【0060】
また、位置更新モードは、現在位置を測位して順次更新することを目的とする間欠動作モードである。この位置更新モードは、ホットスタートが可能となった状態でのみ遷移する間欠動作モードであるため、その動作時間を比較的短い時間(例えば、5秒以下)とすることができる。また、この間欠動作では、航法メッセージを受信し、保持されているエフェメリスデータおよび時刻情報等を用いて測位処理を行い、測位結果をホスト制御部130に送信する。なお、GPS制御部121は、一定間隔(例えば、1秒間隔)毎に、測位結果をホスト制御部130に送信する機能を備える。また、この一定間隔毎の通信では、測位ができていない場合でも、現在補足できているGPS衛星の情報等をホスト制御部130に送信する。
【0061】
このように、本発明の第1の実施の形態では、GPSモジュール120における動作モードとして、衛星捕捉モードまたは位置更新モードが設定されている場合には、各動作について間欠動作を行う。この間欠動作については、その一例を図9に示す。
【0062】
RTC125は、電源が切られている間も、主電源IC131により生成される常時電源から電源供給線205を介して電源供給を受けて動作する計時専用の回路である。発振子126は、RTC125内に供給されるクロック信号を発生させるための振動源であり、例えば、水晶発振子(例えば、周波数:32.768k(Hz))が用いられる。
【0063】
位置演算プロセッサ128は、GPSモジュール120に保持されているエフェメリスデータおよび4個以上のGPS衛星から撮像装置100までの距離データに基づいて、撮像装置100の現在位置を算出するプロセッサである。この算出された現在位置を示す位置情報が、GPSモジュール120のメモリ(図示せず)に順次記録され、通信分離回路124を介してホスト制御部130に出力される。
【0064】
電源制御論理回路122は、GPS制御部121の電源のオン/オフを司る回路であり、例えば、ディスクリート半導体およびリニアICにより構成される。具体的には、電源制御論理回路122は、ホスト制御部130から出力された制御信号と、RTC125から出力された間欠動作時間制御信号および制御信号と、バッテリ200の電圧監視とに基づいて、GPS制御部121の電源のオン/オフを制御する。電源制御論理回路122は、例えば、GPS制御部121の電源のオン/オフを示す2値の制御信号を電源スイッチ123に出力し、電源スイッチ123の開閉を行う。電源スイッチ123は、例えば、FET(Field Effect Transistor)により構成され、電源スイッチ123の開閉により、GPS制御部121の電源のオン/オフが制御される。
【0065】
ここで、ホスト制御部130から出力される制御信号は、GPSモジュール120の電源をオンさせるためのトリガ(電源オントリガ)を示す制御信号であり、信号線206を介して入力される。この制御信号は、例えば、「H(High)」レベルおよび「L(Low)」レベルの制御信号とすることができる。また、この電源オントリガは、例えば、撮像装置100が測位情報を必要としている状態となった場合に、「H」レベルの制御信号が出力される。また、「H」を維持することにより、GPS制御部121が間欠動作中であっても、GPS制御部121に強制的に電源を供給してGPS制御部121を動作させることにより、モード遷移等のコマンドを確実にGPS制御部121へ送信することができる。なお、撮像装置100が測位情報を必要としている状態は、例えば、撮影モード以外の他のモードが設定されている場合において撮影モードに切り替える切替操作がされた場合、または、撮像装置100の電源がオンされ、撮影モードが設定されている場合である。
【0066】
また、RTC125から出力される制御信号は、ホスト制御部130がGPSモジュール120の起動を要求しているか否か(撮像装置100が測位情報を必要としている状態か否かを)を示す制御信号であり、信号線207を介して入力される。この制御信号は、例えば、「H」レベルおよび「L」レベルの制御信号とすることができる。なお、この制御信号は、信号線210を介して入力されるホスト制御部130からの通知に基づいて生成される。また、例えば、水晶発振子の出力を1.2Vに振幅に増幅して出力する32k_out端子は、アウトプットの有り無しの2ステートを備えるため、これを制御信号として用いることができ、電源制御論理回路122内でH/Lへ変換している。具体的には、32k_out端子のアウトプット有りは「L」に変換され、32k_out端子のアウトプット無しは「H」に変換される。以下では、説明の簡略化のため、電源制御論理回路122内での変換結果を信号線207からの出力として説明する。また、図4についても同様とする。
【0067】
また、RTC125から出力される間欠動作時間制御信号は、GPSモジュール120における動作内容を示す制御信号であり、信号線204を介して入力される。例えば、「H」レベルおよび「L」レベルの制御信号とすることができる。例えば、GPSモジュール120における動作モードがエフェメリスデータ取得モードである場合には、間欠動作時間制御信号として「H」レベルの制御信号が出力される。また、GPSモジュール120における動作モードが衛星捕捉モードである場合において、衛星捕捉動作を実行する期間(実行期間)である場合には、間欠動作時間制御信号として「H」レベルの制御信号が出力される。一方、衛星捕捉動作を実行しない期間(間欠期間)である場合には、間欠動作時間制御信号として「L」レベルの制御信号が出力される。また、GPSモジュール120における動作モードが位置更新モードである場合において、位置更新動作を実行する期間(実行期間)である場合には、間欠動作時間制御信号として「H」レベルの制御信号が出力される。一方、位置更新動作を実行しない期間(間欠期間)である場合には、間欠動作時間制御信号として「L」レベルの制御信号が出力される。
【0068】
電源スイッチ123は、電源制御論理回路122からの制御に基づいて、バッテリ200からGPSモジュール120への電源供給のオン/オフを切り替えるスイッチである。なお、電源スイッチ123は、特許請求の範囲に記載の切替部の一例である。
【0069】
ここで、図4を参照して、電源制御論理回路122による電源スイッチ123の制御について説明する。最も優先されるのは、電源供給線202の供給電圧であり、この電圧がGPS制御部121の動作保証電圧範囲外となった場合には、必ず電源スイッチ123が開くように制御される。そこで、以下では、電源供給線202の電圧がGPS制御部121の動作保証電圧範囲内である場合を想定して説明する。なお、図4に示す電源供給線202において、GPS制御部121の動作保証電圧範囲内については「*1」で示し、GPS制御部121の動作保証電圧範囲外については「*2」で示す。
【0070】
例えば、「H」レベルの制御信号が信号線206を介してホスト制御部130から出力された場合には、電源制御論理回路122は、電源スイッチ123を閉じる制御信号を電源スイッチ123に出力する。
【0071】
次に、例えば、RTC125から信号線207を介して「L」レベルの制御信号が出力されている場合を想定する。この場合において、信号線204を介して「H」レベルの制御信号が出力された場合には、電源制御論理回路122は、電源スイッチ123を閉じる制御信号を電源スイッチ123に出力する。これにより、GPSモジュール120に電源が供給される。一方、例えば、信号線204を介して「L」レベルの制御信号が出力されている場合には、電源制御論理回路122は、電源スイッチ123を開ける制御信号を電源スイッチ123に出力する。これにより、GPSモジュール120への電源供給が停止される。
【0072】
次に、例えば、信号線207を介して「H」レベルの制御信号が出力されている場合を想定する。この場合には、例えば、信号線204を介して「H」レベルの制御信号および「L」レベルの制御信号が出力されている場合でも、電源制御論理回路122は、その出力を「L」とし、電源スイッチ123を開ける制御信号を電源スイッチ123に出力する。これにより、GPSモジュール120への電源供給が停止される。
【0073】
次に、例えば、信号線207を介して「L」レベルの制御信号が出力されている場合を想定する。この場合には、信号線206および信号線204の何れか一方または両方から「H」レベルの制御信号が出力された場合に、電源スイッチ123を閉じる制御信号を電源スイッチ123に出力する。これにより、GPSモジュール120に電源が供給される。また、信号線206および信号線204の両方から「L」レベルの制御信号が出力された場合には、電源スイッチ123を開ける制御信号を電源スイッチ123に出力する。これにより、GPSモジュール120への電源供給が停止される。
【0074】
通信分離回路124は、通信線211および212、通信線213および214を開閉するための回路である。例えば、撮像装置100において、撮影モード以外のモードが設定されている場合には、ホスト制御部130(ホスト側)のみがオン状態となり、GPSモジュール120がオフ状態となる。また、例えば、撮影モードが設定されている場合において、撮像装置100の電源がオフされた場合には、GPSモジュール120のみがオン状態となり、ホスト制御部130(ホスト側)がオフ状態となることがある。このため、電源がオフ状態となっている回路に電圧を印加しないようにするため、通信分離回路124が通信線211および212、通信線213および214の開閉を行う。すなわち、通信分離回路124は、通信線211乃至214におけるスイッチに相当する回路である。なお、この例では、GPSモジュール120に通信分離回路124を備える例を示すが、ICの仕様によっては通信分離回路124を省略することも可能である。
【0075】
信号線210は、ホスト制御部130のホスト側準備通知ポートから出力され、GPS制御部121のホスト状態監視ポートおよび通信分離回路124に入力される制御信号を送るための信号線である。具体的には、信号線210は、ホスト制御部130がGPSモジュール120の起動を要求しているか否かをGPS制御部121に通知するとともに、通信分離回路124のホスト制御部130の受信側を開けるための制御信号を送る信号線である。この制御信号により、GPS制御部121からの送信データを受信することができる。例えば、「H」レベルおよび「L」レベルの制御信号とすることができる。例えば、ホスト制御部130がGPSモジュール120の起動を要求している場合には、「H」レベルの制御信号(通知情報)が信号線210を介して出力される。この通知情報は、ホスト制御部130がGPSモジュール120の起動を要求している間、「H」レベルの制御信号が出力される。
【0076】
ここで、信号線210を介してGPS制御部121のホスト状態監視ポートに入力された制御信号に基づいて、GPS制御部121が、信号線207を介して電源制御論理回路122に出力される制御信号を生成する。具体的には、「H」レベルの制御信号が信号線210を介して出力されている場合には、GPS制御部121が、信号線207を介して「L」レベルの制御信号を出力する。また、「L」レベルの制御信号が信号線210を介して出力されている場合には、GSPモジュール120における動作モードが確認される。例えば、GSPモジュール120における動作モードが位置更新モードである場合には、GPSモジュール120の電源供給を停止させるため、GPS制御部121が、信号線207を介して「H」レベルの制御信号を出力する。また、例えば、GSPモジュール120における動作モードが衛星捕捉モードであり動作中である場合、または、エフェメリスデータ取得モードである場合には、これらの動作が終了するまでの間、GPSモジュール120への電源供給を継続して行う。このため、GPS制御部121が、信号線207を介して「L」レベルの制御信号を出力する。
【0077】
通信線211乃至214は、ホスト制御部130およびGPS制御部121間における各種データの送受信を行うための信号線である。例えば、GPSモジュール120における動作モードを指示するコマンドが、通信線213および214を介してホスト制御部130からGPS制御部121に出力される。また、例えば、GPSモジュール120により算出された位置情報が、通信線212および211を介してGPS制御部121からホスト制御部130に出力される。なお、信号線211乃至214を介した通信には、UART(Universal Asynchronous Receiver Transmitter)等の通信回路を用いることができる。
【0078】
信号線215は、ホスト制御部130(ホスト側)からの送信データをGPSモジュール120が受信することができるように、通信分離回路124のGPS制御部121の受信側(GPS受信側)を開けるための制御信号を送る信号線である。例えば、「H」レベルの制御信号が送信されることにより、通信分離回路124のGPS制御部121の受信側(GPS受信側)が開けられる。例えば、通信分離回路124のGPS制御部121の受信側(GPS受信側)については、通常は、GPS制御部121が開放するが、GPS制御部121のファームウェアのアップロード時には、GPS側から開放することができないことも想定される。特に、ファームウェアの初回の書き込み時には、GPS側から開放することができないことが想定される。このため、例えば、「H」レベルの制御信号を信号線215を介して送信することにより、通信分離回路124のGPS制御部121の受信側(GPS受信側)を開けることができる。
【0079】
信号線216は、GPSモジュール120に電源が供給され、ホスト制御部130からのコマンドを受信することができる状態になった場合に、通信分離回路124のGPS制御部121の受信側(GPS受信側)を開けるための制御信号を送る信号線である。例えば、「H」レベルの制御信号を信号線216を介して送ることにより、通信分離回路124のGPS制御部121の受信側(GPS受信側)が開けられる。
【0080】
発振器127は、GPS制御部121内に供給されるクロック信号を発生させるための振動源であり、例えば、水晶発振器(TCXO)が用いられる。
【0081】
[撮像装置の機能構成例]
図5は、本発明の第1の実施の形態における撮像装置100の機能構成例を示すブロック図である。撮像装置100は、操作受付部310と、撮像装置のモード設定部320と、使用要否判定部330と、動作制御部340と、電源供給部350と、測位部360とを備える。
【0082】
操作受付部310は、ユーザからの操作入力を受け付ける操作受付部であり、受け付けられた操作入力に応じた操作内容を撮像装置のモード設定部320、使用要否判定部330および測位部360に出力する。例えば、操作受付部310は、撮像装置100の電源をオン/オフする電源操作が受け付けられた場合には、その操作内容を使用要否判定部330および測位部360に出力する。また、例えば、操作受付部310は、撮像装置100のモードを切り替える切替操作が受け付けられた場合には、その操作内容を撮像装置のモード設定部320に出力する。この切替操作は、例えば、撮影モードから他のモード(再生モード、通信モードまたは各種設定モード)への切替操作、または、他のモード(再生モード、通信モードまたは各種設定モード)から撮影モードへの切替操作である。なお、操作受付部310は、図1に示す操作受付部150に対応する。
【0083】
撮像装置のモード設定部320は、操作受付部310により受け付けられた切替操作に応じて、撮影モード、再生モード、通信モードおよび各種設定モードの何れかのモードを設定するものである。そして、撮像装置のモード設定部320は、その設定内容を使用要否判定部330および測位部360に出力する。なお、撮像装置のモード設定部320は、図1および図3に示すホスト制御部130に対応する。
【0084】
使用要否判定部330は、操作受付部310により操作入力が受け付けられた場合に、その操作入力に基づく処理が、測位部360により取得される測位情報を用いる処理(特定処理)であるか否かを判定するものである。すなわち、使用要否判定部330は、操作受付部310により操作入力が受け付けられた場合に、その操作入力に基づく処理が、測位部360を用いる特定処理であるか否かを判定する。例えば、撮像装置100の電源をオフする電源操作が受け付けられた場合には、使用要否判定部330は、その操作入力に基づく処理が特定処理でないと判定する。また、例えば、撮影モードが設定されている場合において、撮影モードから他のモード(再生モード、通信モードまたは各種設定モード)への切替操作が受け付けられた場合には、使用要否判定部330は、その操作入力に基づく処理が特定処理でないと判定する。一方、例えば、撮像装置100の電源をオンする電源操作が受け付けられた場合において、撮影モードが設定されている場合には、使用要否判定部330は、その操作入力に基づく処理が特定処理であると判定する。また、例えば、撮影モード以外の他のモードが設定されている場合において、他のモードから撮影モードへの切替操作が受け付けられた場合には、使用要否判定部330は、その操作入力に基づく処理が特定処理であると判定する。そして、使用要否判定部330は、その判定結果を動作制御部340に出力する。なお、使用要否判定部330は、撮像装置100がスタンバイ状態(待機状態)となった場合に、そのスタンバイ状態において行われる処理が特定処理であるか否かを判定するようにしてもよい。また、使用要否判定部330は、図1および図3に示すホスト制御部130に対応する。なお、使用要否判定部330は、特許請求の範囲に記載の判定部の一例である。
【0085】
動作制御部340は、使用要否判定部330から出力された判定結果と、測位部360から出力された測位部360における動作モードとに基づいて、測位部360への電源供給の制御を行うことにより測位部360の動作制御を行うものである。例えば、操作入力に基づく処理が特定処理である旨の判定結果が使用要否判定部330から出力された場合には、動作制御部340は、測位部360に電源を供給する制御を行い、測位部360を動作させる制御を行う。また、例えば、操作入力に基づく処理が特定処理でない旨の判定結果が使用要否判定部330から出力された場合には、動作制御部340は、測位部360における動作モードに基づいて、測位部360の動作制御を行う。すなわち、動作制御部340は、測位部360における動作モードがエフェメリスデータ取得モードである場合、または、衛星捕捉モードであり動作中である場合には、これらの各動作が終了するまでの間、測位部360に電源を供給する制御を行う。これにより、その動作が終了するまでの間、測位部360の動作を継続して行わせ、その動作の終了後、測位部360を停止させる制御を行う。また、動作制御部340は、測位部360における動作モードが位置更新モードである場合、または、衛星捕捉モードであるが動作中でない場合には、測位部360への電源供給を停止する制御を行い、測位部360を停止させる制御を行う。なお、動作制御部340は、図3に示すGPS制御部121および電源制御論理回路122に対応する。また、この動作制御については、図7および図8を参照して詳細に説明する。なお、動作制御部340は、特許請求の範囲に記載の制御部および取得部の一例である。また、エフェメリスデータ取得モード、または、衛星捕捉モードであり動作中である場合は、特許請求の範囲に記載の第1のモードの一例である。また、測位部360を停止させた後の測位部360のオフ状態は、特許請求の範囲に記載の第2のモードの一例である。
【0086】
電源供給部350は、動作制御部340の制御に基づいて、測位部360に電源を供給するものである。なお、電源供給部350は、図1および図3に示すバッテリ200に対応する。
【0087】
測位部360は、測位処理のために必要な測位情報を外部から受信するものであり、電源供給部350から電源供給を受けて測位処理を行う。例えば、測位部360は、撮像装置のモード設定部320により撮影モードが設定された場合には、電源供給部350から電源供給を受けて測位処理を行う。また、測位部360は、現在の動作モード(エフェメリスデータ取得モード、衛星捕捉モード、位置更新モード)を動作制御部340に出力する。なお、測位部360は、図1および図3に示すGPSモジュール120に対応する。また、測位部360は、特許請求の範囲に記載の受信部の一例である。
【0088】
[位置取得モードの指定画面の表示例]
図6は、本発明の第1の実施の形態における表示部160の表示例(位置取得モード指定画面400)を示す図である。位置取得モード指定画面400は、撮影モードの設定時における位置取得モードを指定するための画面である。また、位置取得モード指定画面400には、位置取得モードを指定するための複数のボタンと、戻るボタン405と、決定ボタン406とが設けられている。なお、位置取得モードを指定するための複数のボタンとして、「位置取得優先モード」ボタン401と、「位置取得・消費電力バランスモード」ボタン402と、「低消費電力モード」ボタン403と、「GPSオフモード」ボタン404とが設けられている。また、位置取得モード指定画面400は、例えば、撮影モードを設定する操作入力が行われた場合に、表示部160に表示される。
【0089】
「位置取得優先モード」ボタン401は、位置取得優先モードを指定する場合に押下されるボタンである。位置取得優先モードは、撮影モードが設定されている場合には、測位部360に常に電源を供給して測位動作を行うモードである。すなわち、撮影モードが設定され、位置取得優先モードが指定されている場合には、測位部360が常に動作状態となっている。このため、最新の測位情報を用いることができるが、消費電力が大きくなる。
【0090】
「位置取得・消費電力バランスモード」ボタン402は、位置取得・消費電力バランスモードを指定する場合に押下されるボタンである。位置取得・消費電力バランスモードは、撮影モードが設定されている場合には、測位部360における動作モードに応じて測位部360に適宜電源が供給され、測位動作を行うモードである。また、ユーザ操作による電源オフや、撮影モード以外のモードに切り替えるモード切替の操作入力がされた場合には、一定条件により、測位部360への電源供給を一定期間継続して行う。すなわち、位置取得・消費電力バランスモードは、図9に示す処理手順を行う動作モードである。なお、本発明の第1の実施の形態では、位置取得・消費電力バランスモードが設定されている場合を例にして説明する。
【0091】
「低消費電力モード」ボタン403は、低消費電力モードを指定する場合に押下されるボタンである。低消費電力モードは、撮影モードが設定されている場合には、測位部360における動作モードに応じて測位部360に適宜電源が供給され、測位動作を行うモードである。また、ユーザ操作による電源オフや、撮影モード以外のモードに切り替えるモード切替の操作入力がされた場合に、この操作入力に応じて測位部360への電源供給を停止される。すなわち、低消費電力モードは、図9に示す処理手順のうち、割り込み処理800を行わない動作モードである。このため、GPSのみが動作する状態がなくなることにより消費電力を低減させることができるが、エフェメリスデータ取得中であってもGPSの動作を停止させるため、位置情報の取得が遅くなることがある。
【0092】
「GPSオフモード」ボタン404は、GPSオフモードを指定する場合に押下されるボタンである。GPSオフモードは、測位動作を行わないモードである。すなわち、撮影モードが設定されている場合でも、GPSオフモードが指定されている場合には、測位部360に電源が供給されず、測位部360がオフ状態となっている。このため、消費電力を低減させることができるが、測位情報を用いることができない。
【0093】
決定ボタン406は、位置取得モードを指定する押下操作がされた後に、その指定を決定する際に押下されるボタンである。戻るボタン405は、例えば、直前に表示されていた表示画面に戻る場合に押下されるボタンである。
【0094】
[測位部の動作制御例]
図7および図8は、本発明の第1の実施の形態における動作制御部340により測位部360の動作制御を行う場合を示すシーケンスチャートである。図7および図8に示す例では、撮像装置のモード設定部320により設定される撮像装置100におけるモード421と、測位部360における動作モード422と、測位部360への電源供給の有無423との関係を概略的に示す。なお、撮像装置100におけるモード421は、撮影モード、再生モード、通信モードおよび各種設定モードの何れかである。また、図7および図8に示す縦軸は時間軸を示す。
【0095】
図7および図8には、撮像装置のモード設定部320により撮影モードが設定されている場合における動作制御例を示す。図7に示す例では、撮影モードが設定されている場合に、撮像装置100の電源をオフする電源操作が行われる場合を想定して説明する。また、図7に示す例では、撮影モードが設定されているため、測位部360には電源供給部350からの電源供給が行われているものとする。
【0096】
図7(a)には、測位部360における動作モード422として衛星捕捉モードが設定され、衛星捕捉モードにおける衛星捕捉動作が実行中である場合を示す。このように衛星捕捉動作が実行中に、矢印431に示すように、撮像装置100の電源をオフする電源操作が行われた場合には、使用要否判定部330が測位部360の要否を判定する。この場合には、撮影モードが設定されているが、撮像装置100の電源がオンされるため、撮影モードにおける撮像処理が行われない。このため、測位部360により取得された測位情報を用いることはない。そこで、使用要否判定部330は、測位部360により取得された測位情報を用いない旨の判定結果を動作制御部340に出力する。
【0097】
動作制御部340は、測位部360により取得された測位情報を用いない旨の判定結果が使用要否判定部330から出力されたため、測位部360における動作モードに基づいて、測位部360への電源供給の要否を判断する。ここで、測位部360における動作モード422として衛星捕捉モードが設定され、衛星捕捉モードにおける衛星捕捉動作が実行中であるため、動作制御部340は、その衛星捕捉動作が終了するまで、電源供給を継続して行う。そして、その衛星捕捉動作が終了した場合には、矢印432に示すように、動作制御部340は、測位部360への電源供給を停止する。
【0098】
なお、測位部360が、エフェメリスデータを取得する取得基準を満たしているか否かを判断し、その取得基準を満たしている場合には、エフェメリスデータ取得モードにおけるエフェメリスデータ取得動作を行うようにしてもよい。例えば、対象となる全てのGPS衛星の仰角が一定角度以上であり、かつ、少なくとも1つのGPS衛星からの信号強度(CNR)が一定値以上であることを、その取得基準として用いることができる。その取得基準を満たしている場合には、エフェメリスデータ取得動作が行われ、このエフェメリスデータ取得動作が終了するまで、動作制御部340は測位部360への電源供給を継続して行う。
【0099】
また、衛星捕捉動作の終了時およびエフェメリスデータ取得動作の終了時に、撮像装置100の電源をオンする電源操作が行われたか否かを判断し、電源をオンする電源操作が行われた場合には測位部360への電源供給を継続して行うようにしてもよい。この場合には、測位部360が衛星捕捉モードに移行して衛星捕捉モードにおける間欠動作を実行する。
【0100】
なお、測位部360における動作モード422として衛星捕捉モードが設定されているが衛星捕捉動作の実行中でない場合には、動作制御部340は、撮像装置100の電源をオフする電源操作が行われると、測位部360への電源供給を停止する。
【0101】
図7(b)には、測位部360における動作モード422としてエフェメリスデータ取得モードが設定されている場合を示す。このようにエフェメリスデータ取得モードが設定されている場合に、矢印433に示すように、撮像装置100の電源をオフする電源操作が行われた場合には、使用要否判定部330が測位部360の要否を判定する。この場合には、図7(a)に示す場合と同様に、測位部360により取得された測位情報を用いることはない。そこで、使用要否判定部330は、測位部360により取得された測位情報を用いない旨の判定結果を動作制御部340に出力する。
【0102】
また、動作制御部340は、図7(a)に示す場合と同様に、測位部360における動作モードに基づいて、測位部360への電源供給の要否を判断する。ここで、測位部360における動作モード422としてエフェメリスデータ取得モードが設定されているため、動作制御部340は、そのエフェメリスデータ取得動作が終了するまで、電源供給を継続して行う。そして、そのエフェメリスデータ取得動作が終了した場合には、矢印434に示すように、動作制御部340は、測位部360への電源供給を停止する。なお、エフェメリスデータ取得動作の終了時に、撮像装置100の電源をオンする電源操作が行われたか否かを判断し、電源をオンする電源操作が行われた場合には測位部360への電源供給を継続して行うようにしてもよい。この場合には、測位部360が衛星捕捉モードに移行して衛星捕捉モードにおける間欠動作を実行する。
【0103】
図7(c)には、測位部360における動作モード422として位置更新モードが設定されている場合を示す。このように位置更新モードが設定されている場合に、矢印435に示すように、撮像装置100の電源をオフする電源操作が行われた場合には、使用要否判定部330が測位部360の要否を判定する。この場合には、図7(a)に示す場合と同様に、測位部360により取得された測位情報を用いることはない。そこで、使用要否判定部330は、測位部360により取得された測位情報を用いない旨の判定結果を動作制御部340に出力する。
【0104】
また、動作制御部340は、図7(a)に示す場合と同様に、測位部360における動作モードに基づいて、測位部360への電源供給の要否を判断する。ここで、測位部360における動作モード422として位置更新モードが設定されているため、動作制御部340は、矢印436に示すように、測位部360への電源供給を停止する。
【0105】
図8に示す例では、撮影モードが設定されている場合に、撮影モードから再生モードへの切替操作が行われる場合を想定して説明する。また、図8に示す例では、撮影モードが設定されているため、測位部360には電源供給部350からの電源供給が行われているものとする。
【0106】
図8(a)には、測位部360における動作モード422として衛星捕捉モードが設定され、衛星捕捉モードにおける衛星捕捉動作が実行中である場合を示す。このように衛星捕捉動作が実行中に、矢印441に示すように、撮影モードから再生モードへの切替操作が行われた場合には、使用要否判定部330が測位部360の要否を判定する。この再生モードでは、図7(a)に示す場合と同様に、測位部360により取得された測位情報を用いることはない。そこで、使用要否判定部330は、測位部360により取得された測位情報を用いない旨の判定結果を動作制御部340に出力する。
【0107】
また、動作制御部340は、図7(a)に示す場合と同様に、測位部360における動作モードに基づいて、測位部360への電源供給の要否を判断する。ここで、測位部360における動作モード422として衛星捕捉モードが設定され、衛星捕捉モードにおける衛星捕捉動作が実行中であるため、動作制御部340は、その衛星捕捉動作が終了するまで、電源供給を継続して行う。そして、その衛星捕捉動作が終了した場合には、矢印442に示すように、動作制御部340は、測位部360への電源供給を停止する。また、図7(a)に示す場合と同様に、測位部360が、エフェメリスデータを取得する取得基準を満たしているか否かを判断し、その取得基準を満たしている場合には、エフェメリスデータ取得モードにおけるエフェメリスデータ取得動作を行うようにしてもよい。
【0108】
また、図7(a)に示す場合と同様に、衛星捕捉動作の終了時およびエフェメリスデータ取得動作の終了時に、再生モードから撮影モードへの切替操作が行われたか否かを判断する。そして、この切替操作が行われた場合には測位部360への電源供給を継続して行うようにしてもよい。この場合には、測位部360が衛星捕捉モードに移行して衛星捕捉モードにおける間欠動作を実行する。
【0109】
なお、測位部360における動作モード422として衛星捕捉モードが設定されているが衛星捕捉動作の実行中でない場合には、動作制御部340は、撮影モードから再生モードへの切替操作が行われると、測位部360への電源供給を停止する。
【0110】
図8(b)には、測位部360における動作モード422としてエフェメリスデータ取得モードが設定されている場合を示す。このようにエフェメリスデータ取得モードが設定されている場合に、矢印443に示すように、撮影モードから再生モードへの切替操作が行われた場合には、使用要否判定部330が測位部360の要否を判定する。この場合には、図7(b)に示す場合と同様に、測位部360により取得された測位情報を用いることはない。そこで、使用要否判定部330は、測位部360により取得された測位情報を用いない旨の判定結果を動作制御部340に出力する。
【0111】
また、動作制御部340は、図7(b)に示す場合と同様に、測位部360における動作モードに基づいて、測位部360への電源供給の要否を判断する。ここで、測位部360における動作モード422としてエフェメリスデータ取得モードが設定されているため、動作制御部340は、そのエフェメリスデータ取得動作が終了するまで、電源供給を継続して行う。そして、そのエフェメリスデータ取得動作が終了した場合には、矢印444に示すように、動作制御部340は、測位部360への電源供給を停止する。なお、エフェメリスデータ取得動作の終了時に、再生モードから撮影モードへの切替操作が行われたか否かを判断し、電源をオンする電源操作が行われた場合には測位部360への電源供給を継続して行うようにしてもよい。この場合には、測位部360が衛星捕捉モードに移行して衛星捕捉モードにおける間欠動作を実行する。
【0112】
図8(c)には、測位部360における動作モード422として位置更新モードが設定されている場合を示す。このように位置更新モードが設定されている場合に、矢印445に示すように、撮影モードから再生モードへの切替操作が行われた場合には、使用要否判定部330が測位部360の要否を判定する。この場合には、図7(c)に示す場合と同様に、測位部360により取得された測位情報を用いることはない。そこで、使用要否判定部330は、測位部360により取得された測位情報を用いない旨の判定結果を動作制御部340に出力する。
【0113】
また、動作制御部340は、図7(c)に示す場合と同様に、測位部360における動作モードに基づいて、測位部360への電源供給の要否を判断する。ここで、測位部360における動作モード422として位置更新モードが設定されているため、動作制御部340は、矢印446に示すように、測位部360への電源供給を停止する。
【0114】
なお、撮影モードから、通信モードまたは各種設定モードへの切替操作が行われた場合についても、図8に示す撮影モードから再生モードへの切替操作が行われた場合と同様である。このため、ここでの説明を省略する。
【0115】
[撮像装置の動作例]
図9は、本発明の第1の実施の形態における撮像装置100による測位処理の処理手順の一例を示すフローチャートである。この例では、図6に示す位置取得モード指定画面400における「位置取得・消費電力バランスモード」ボタン402の押下により、位置取得・消費電力バランスモードが設定されている場合を例にして説明する。
【0116】
例えば、ユーザ操作により撮像装置100の電源をオンする操作入力が受け付けられると、ホストシステムが起動する。そして、撮影モード以外の他のモードから撮影モードへの切替操作が受け付けられた場合、または、撮影モードにて起動した場合には(ステップS900)、GPSモジュール120における動作モードが判断される(ステップS901)。すなわち、ホスト制御部130が、GPSモジュール120における動作モードを確認するためのコマンドをGPS制御部121に送信し、GPSモジュール120における動作モードを判断する。また、GPSモジュール120から定期的に送信される測位情報の中にGPSモジュール120の状態を含めておき、これにより、GPSモジュール120における動作モードを判断するようにしてもよい。すなわち、信号線210によりホスト制御部130の受信ポートを開き、受信されたデータを読むことにより、GPSモジュール120の動作モードを判断することができる。なお、受信データがない場合には、GPSモジュール120がオフ状態であると判断することができる。ここで、本発明の第1の実施の形態では、撮像装置100のホスト制御部130側の電源がオフされている状態でも、GPSモジュール120の電源がオンされている場合が存在する。このため、撮像装置100の電源をオンする操作入力が受け付けられた直後に、GPSモジュール120における動作モードが判断される。
【0117】
GPSモジュール120における動作モードが、衛星捕捉モードである場合には(ステップS901)、衛星捕捉動作を規定時間継続して行う(ステップS923)。また、測位部360の動作モードが、エフェメリスデータ取得モード(図9では「Eph.取得モード」で示す)である場合には(ステップS901)、エフェメリスデータ取得動作を継続して行う(ステップS926)。また、GPSモジュール120が電源オフの状態である場合には(ステップS901)、電源制御論理回路122が、バッテリ200からGPSモジュール120への電源供給を開始させる(ステップS902)。
【0118】
続いて、GPSモジュール120が、衛星捕捉モードにおける間欠動作を実行する(ステップS903)。この間欠動作は、例えば、GPS衛星を特定することができる程度の時間(例えば、18秒間)、GPSモジュール120をオン状態として行われる。例えば、衛星捕捉動作の実行状態を18秒間とし、衛星捕捉動作のオフ状態を72秒間とすることができる。
【0119】
続いて、GPSモジュール120が、エフェメリスデータを保持しているか否かを判断する(ステップS904)。GPSモジュール120が、エフェメリスデータを保持している場合には(ステップS904)、保持されているエフェメリスデータが、有効なエフェメリスデータであるか否かが判断される(ステップS905)。保持されているエフェメリスデータが有効なエフェメリスデータである場合には(ステップS905)、保持されているエフェメリスデータについて、測位を行うに際して十分なエフェメリスデータが存在するか否かが判断される(ステップS906)。例えば、測位では、4つ以上の衛星を捕捉する必要があるため、保持されているエフェメリスデータにより、4つ以上の衛星を捕捉することができるか否かが判断される。
【0120】
測位を行うに際して十分なエフェメリスデータが存在する場合には(ステップS906)、新しい衛星が見えたか否かが判断される(ステップS907)。新しい衛星が見えていない場合には(ステップS907)、GPSモジュール120が、位置更新モードにおける間欠動作を実行する(ステップS908)。例えば、位置更新動作の実行状態を3秒間とし、位置更新動作のオフ状態を12秒間とすることができる。
【0121】
続いて、GPSモジュール120が、保持されているエフェメリスデータが、測位に十分かつ有効なエフェメリスデータであるか否かが判断される(ステップS909)。そして、保持されているエフェメリスデータが、測位に十分かつ有効なエフェメリスデータである間は、位置更新モードにおける間欠動作を継続して行う(ステップS908)。ここで、保持されているエフェメリスデータが、測位に十分かつ有効なエフェメリスデータである間とは、例えば、現在の状況において、保持されているエフェメリスデータが測位に十分なGPS衛星数かつ有効期間内となっている期間である。
【0122】
また、GPSモジュール120が、エフェメリスデータを保持していない場合(ステップS904)、または、保持されているエフェメリスデータが有効なエフェメリスデータでない場合には(ステップS905)、ステップS910に進む。また、保持されているエフェメリスデータについて、測位を行うに際して十分なエフェメリスデータが存在しない場合(ステップS906)、または、新しい衛星が見えた場合には(ステップS907)、ステップS910に進む。
【0123】
そして、GPSモジュール120が、エフェメリスデータを取得する取得基準を満たしているか否かを判断する(ステップS910)。その取得基準を満たしている場合には(ステップS910)、GPSモジュール120が、エフェメリスデータ取得モードにおけるエフェメリスデータ取得動作を行う(ステップS911)。このエフェメリスデータ取得動作は、例えば、十分なエフェメリスデータが取得された場合、または、終了条件を満たす場合に終了する。例えば、設定時間が経過したこと、または、継続基準を満たさないことを、その終了条件として用いることができる。そして、エフェメリスデータ取得動作(ステップS911)を終了した場合には、ステップS903に戻る。また、エフェメリスデータを取得する取得基準を満たしていない場合には(ステップS910)、ステップS903に戻る。なお、この例では、ステップS910において、エフェメリスデータを取得する取得基準を満たしている場合には、ステップS911に進む例を示した。しかしながら、ステップS907を通過した後に、ステップS910に進んだ場合には、既に測位に十分なエフェメリスデータがあることになる。このため、ステップS907を通過した後に、ステップS910に進んだ場合には、S908へ遷移するようにしてもよい。
【0124】
ここで、点線の矩形内に示す処理手順は、割り込み処理800の処理手順である。この例では、撮像装置100の電源をオフするユーザ操作、または、撮影モード以外の他のモードへの切替操作を割り込み処理を行うためのトリガとする場合を例にして説明する。
【0125】
撮像装置100の電源をオフする操作入力、または、撮影モード以外の他のモードへの切替操作が受け付けられると(ステップS920)、撮像装置100のホスト側の電源がオフされ、ホスト側の電源オフがGPSモジュール120に通知される。なお、ステップS920は、特許請求の範囲に記載の判定手順の一例である。ホスト側の電源オフが通知されると、この通知時における動作モードをGPSモジュール120が確認する(ステップS921)。この通知時における動作モードが、エフェメリスデータ取得モードである場合には(ステップS921)、エフェメリスデータ取得動作を継続して行う(ステップS926)。また、その通知時における動作モードが、位置更新モードである場合には(ステップS921)、GPSモジュール120の電源がオフされる(ステップS927)。すなわち、GPSモジュール120が、電源制御論理回路122に電源オフの通知を行い、電源制御論理回路122がGPSモジュール120への電源の供給を停止させる(ステップS927)。また、その通知時における動作モードが、衛星捕捉モードである場合には(ステップS921)、GPSモジュール120が、衛星捕捉モードにおける衛星捕捉動作を実行中であるか否かを判断する(ステップS922)。
【0126】
衛星捕捉モードにおける衛星捕捉動作を実行中である場合には(ステップS922)、GPSモジュール120が、その衛星捕捉動作を規定時間継続して行う(ステップS923)。そして、GPSモジュール120が、エフェメリスデータを取得する取得基準を満たしているか否かを判断する(ステップS924)。この取得基準は、ステップS910における取得基準と同一とすることができる。
【0127】
その取得基準を満たしている場合には(ステップS924)、GPSモジュール120が、エフェメリスデータ取得モードにおけるエフェメリスデータ取得動作を行う(ステップS926)。このエフェメリスデータ取得動作は、例えば、十分なエフェメリスデータが取得された場合、または、終了条件を満たす場合に終了する。この終了条件は、ステップS911における終了条件と同一とすることができる。そして、エフェメリスデータ取得動作(ステップS926)を終了した場合には、ステップS925に進む。また、エフェメリスデータを取得する取得基準を満たしていない場合には(ステップS924)、ステップS925に進む。
【0128】
続いて、GPSモジュール120が、撮像装置100のホスト側の状態を確認する(ステップS925)。そして、ホスト側の電源状態がオンである場合、かつ、撮影モードが設定されている場合には(ステップS925)、ステップS903に戻る。一方、ホスト側の電源状態がオフである場合、または、撮影モード以外の他のモードが設定されている場合には(ステップS925)、GPSモジュール120の電源がオフされる(ステップS927)。これにより、ホスト側およびGPS側の電源がオフ状態となる。なお、ステップS921乃至S926は、特許請求の範囲に記載の制御手順の一例である。
【0129】
ここで、ステップS927において、エフェメリスデータの取得が未完了な場合も想定される。このため、ステップS927において、GPSモジュール120の電源をオフする前に、衛星補足モードにおける間欠動作を所定回数または所定時間だけ実行し、この衛星補足間欠動作の実行後に、GPSモジュール120の電源をオフするようにしてもよい。この例を、図10に示す。
【0130】
図10は、本発明の第1の実施の形態における撮像装置100による測位処理の処理手順の一例を示すフローチャートである。この処理手順は、図9に示すステップS927の変形例であり、GPSモジュール120の電源をオフする前に、衛星補足モードにおける間欠動作を所定回数だけ実行する例である。なお、図10に示す処理手順のうち、図9と同様の処理手順については、同一の符号を付して、これらの説明を省略する。
【0131】
図9に示すステップS925において、撮像装置100のホスト側の電源状態がオフである場合、または、撮影モード以外の他のモードが設定されている場合には(ステップS925)、衛星補足モードにおける間欠動作を所定回数だけ実行する。すなわち、図9に示すステップS903乃至S907、S910、S911を所定回数だけ実行する。そして、ステップS903乃至S907、S910、S911を所定回数だけ実行した場合には(ステップS940)、ステップS925に進む。なお、この例では、衛星補足モードにおける間欠動作を所定回数だけ実行する例を示したが、ステップS940において、衛星補足モードにおける間欠動作を所定時間だけ実行したか否かを判断するようにしてもよい。
【0132】
これにより、撮像装置100のホスト側の電源状態がオフである場合、または、撮影モード以外の他のモードが設定されている場合でも、エフェメリスデータの取得が可能となり、次回以降の測位を速めることができる。なお、図10に示す処理手順を行うか否か、または、図10に示す処理手順を行う場合における衛星補足モードの間欠動作の実行回数または実行時間を設定可能とするようにしてもよい。これにより、消費電力を考慮したユーザ設定を可能とすることができる。
【0133】
なお、本発明の第1の実施の形態では、撮像装置100の電源をオフするユーザ操作、または、撮影モード以外の他のモードへの切替操作を割り込み処理を行うためのトリガとする例を示した。ただし、例えば、撮像装置100がスタンバイ状態(待機状態)となった場合を割り込み処理を行うためのトリガとするようにしてもよい。すなわち、撮影モードが設定されている場合において、撮像装置100における状態が変化して、スタンバイ状態となった場合を割り込み処理を行うためのトリガとすることができる。
【0134】
また、撮像装置100の電源をオフするユーザ操作がされて、割り込み処理が実行されている場合には、撮像装置100のホスト側の電源がオフ状態となっている可能性がある。この場合に、GPSモジュール120が動作中であることをユーザに通知する通知部を撮像装置100に外装するようにしてもよい。この通知部は、例えば、GPSモジュール120からの制御に基づいて、ユーザに対する通知処理を行う。この通知部として、例えば、撮像装置100の側面にLED(Light Emitting Diode)を設け、GPSモジュール120からの制御に基づいて、そのLEDを発光させることができる。これにより、電源のオフ操作が行われた後において、GPSモジュール120が動作中であることをユーザに通知することができる。
【0135】
このように、例えば、撮像装置100において電源のオン/オフ操作が繰り返し行われるような場合において、撮像装置100のメイン電源がオフされた後でも、必要に応じて、GPSモジュール120の動作を継続して行わせることができる。このため、次の起動時には、GPSモジュール120がホットスタートを行うことができる可能性が高いため、測位処理を迅速に行うことができる。
【0136】
また、GPS衛星が見つかりにくい環境下では、撮像装置100のメイン電源がオフされた後でも、そのオフ時に衛星捕捉モードの間欠動作が実行中であれば、その動作が終了するまでの間、衛星探索を継続して行う。そして、その動作中にGPS衛星が見つかった場合には、エフェメリスデータの取得動作を継続して行うことができる。このため、次の起動時には、GPSモジュール120がホットスタートを行うことができ、測位処理を迅速に行うことができる。
【0137】
また、GPSモジュール120により取得される測位情報を用いる必要がないモード(再生モード、通信モード等)が設定されている場合において、GPSモジュール120をオフ状態とすることができる。これにより消費電力を低減させることができる。
【0138】
また、GPS衛星が見つからない状態においても、衛星捕捉モードにおいて衛星捕捉の間欠動作を行う。このため、消費電力を抑えつつ、エフェメリスデータを取得することができる環境下に移動した場合には、位置情報の取得へ迅速に遷移することができる。
【0139】
また、位置更新モードにおいて間欠動作を行うため、消費電力を抑えつつ、適切な位置の更新が可能となる。また、位置更新モードにおける間欠動作中にGPS衛星が見えない状況に移動した場合でも同じ動作を継続する。これにより、再び測位可能な位置に移動した場合には、迅速に位置の更新を行うことができる
【0140】
また、エフェメリスデータ取得モード以外のモード(衛星捕捉モード、位置更新モード)が設定されている場合には、間欠動作となるため、消費電力を抑えることができる
【0141】
また、間欠動作時の動作Dutyを適宜変更することにより、GPSモジュール120へ割く電力を下げることができるため、バッテリ容量や消費電力が厳しいシステムにおいても、比較的組み込みやすくなる。
【0142】
また、GPSモジュール120の電源をオフする場合に、撮像装置100のホスト側の状態確認を行うため、GPSモジュール120の動作を途切れさせずに、実装可能となる。
【0143】
このように、本発明の第1の実施の形態によれば、撮像装置100における消費電力を削減するとともに、GPSモジュール120により適切な測位を行うことができる。
【0144】
<2.第2の実施の形態>
本発明の第1の実施の形態では、間欠動作の間欠中にはGPS制御部の電源をオフする例を示した。しかしながら、間欠動作の間欠中には、GPS制御部の電源をオフせずに、GPS制御部をスタンバイ状態とするようにしてもよい。そこで、本発明の第2の実施の形態では、間欠動作の間欠中には、GPS制御部をスタンバイ状態とする場合を例にして説明する。
【0145】
[GPSモジュールの構成例]
図11は、本発明の第2の実施の形態におけるGPSモジュール600の内部構成例を示す図である。図11に示す例は、図3に示すGPSモジュール120またはホスト制御部130の変形例であり、一部を変形したものである。このため、以下では、図3に示すGPSモジュール120またはホスト制御部130と異なる点を中心にして説明し、共通する部分については同一の符号を付してこれらの説明の一部を省略する。
【0146】
図12は、本発明の第2の実施の形態における電源制御論理回路620の制御内容を模式的に示す図である。図12に示す電源制御論理回路620の制御内容については、図11を参照して詳細に説明する。
【0147】
GPSモジュール600は、図3に示すGPSモジュール120において、間欠制御論理回路630を追加して、電源制御論理回路122の代わりに、電源制御論理回路620を設けたものである。また、GPSモジュール600は、GPS制御部610と、電源制御論理回路620と、間欠制御論理回路630と、電源スイッチ123と、通信分離回路124とを備える。
【0148】
GPS制御部610は、GPSモジュール600を制御する制御回路であり、RTC611および位置演算プロセッサ128を内蔵する。GPS制御部610は、GPS電源オン制御ポートから信号線641を介して電源制御論理回路620に制御信号を出力する。信号線641を介して出力される制御信号は、ホスト制御部130がGPSモジュール120の起動を要求しているか否かを示す制御信号であり、信号線644を介してRTC611から出力される制御信号と同様のタイミングとすることができる。ただし、ホスト側とは異なり、トリガではなく、GPS側のオフが確定するまで、「H」レベルの制御信号が継続して出力される。
【0149】
電源制御論理回路620は、GPS制御部610の電源のオン/オフを司る回路であり、例えば、ディスクリート半導体およびリニアICにより構成される。具体的には、電源制御論理回路620は、ホスト制御部130から出力される制御信号と、GPS制御部610から出力される制御信号と、バッテリ200の電圧監視とに基づいて、GPS制御部610の電源のオン/オフを制御する。具体的には、図12(a)を参照して説明する。例えば、電源供給線202の供給電圧がGPS制御部610の動作保証電圧範囲内である場合を想定する。この場合には、電源制御論理回路620は、ホスト制御部130またはGPS制御部610の少なくとも1つから「H」レベルの制御信号が出力されたときに、「H」レベルの制御信号を電源スイッチ123に出力する。これにより、GPS制御部610の電源がオンされる。一方、例えば、電源供給線202の供給電圧がGPS制御部610の動作保証電圧範囲外である場合には、電源制御論理回路620は、ホスト制御部130およびGPS制御部610の制御信号にかかわらず、「L」レベルの制御信号を電源スイッチ123に出力する。これにより、GPS制御部610の電源が強制的にオフされる。
【0150】
間欠制御論理回路630は、GPS制御部610をオン状態またはスタンバイ状態とする回路である。具体的には、間欠制御論理回路630は、RTC611から出力される間欠動作時間制御信号と、RTC611から出力される制御信号とに基づいて、GPS制御部610をオン状態またはスタンバイ状態とする制御を行う。例えば、間欠制御論理回路630は、信号線642を介して出力される制御信号を「L」レベルから「H」レベルとすることにより、GPS制御部610を割り込み処理によりオン状態とする。また、例えば、間欠制御論理回路630は、信号線642を介して出力される制御信号を「H」レベルから「L」レベルとすることにより、GPS制御部610を割り込み処理によりスタンバイ状態とする。
【0151】
また、RTC611から出力される制御信号は、ホスト制御部130がGPSモジュール600の起動を要求しているか否かを示す制御信号であり、信号線644を介して入力される。この制御信号は、例えば、図3に示す信号線207を介して出力される制御信号と同様に、「H」レベルおよび「L」レベルの制御信号とすることができる。また、この制御信号は、信号線210を介して入力されるホスト制御部130からの通知に基づいて生成される。また、図3と同様に、例えば、32k_out端子のアウトプットの有り無しを用いることができる。また、この制御信号により、タイマカウントビットがフルとなった場合における意図しない一時的な「H」レベルの制御信号を遮断することができる。
【0152】
また、RTC611から出力される間欠動作時間制御信号は、GPSモジュール600における動作内容を示す制御信号であり、信号線643を介して入力される。この間欠動作時間制御信号は、例えば、図3に示す間欠動作時間制御信号と同様に、「H」レベルおよび「L」レベルの制御信号とすることができる。また、これらの各制御信号(信号線643および644)と、間欠制御論理回路630から信号線642を介して出力される制御信号との関係の一例を、図12(b)に示す。
【0153】
このように、GPSモジュール600の間欠動作の間欠中には、GPS制御部610をスタンバイ状態とすることができる。なお、図11において、ホスト制御部130およびGPS制御部610からの制御信号の入力を省略して、電源制御論理回路620への入力をバッテリ200の電圧監視のみとし、GPS制御部610に常に電源を供給するようにしてもよい。この場合でも、間欠制御論理回路630によりGPS制御部610をオン状態またはスタンバイ状態とすることができるため、消費電力を低減させることができる。なお、間欠制御論理回路630は、特許請求の範囲に記載の切替部(制御信号線によるオン/スタンバイを切り替える切替部)の一例である。また、GPS制御部610のスタンバイ状態は、特許請求の範囲に記載の第2のモードの一例である。
【0154】
<3.第3の実施の形態>
本発明の第1の実施の形態では、GPS衛星から取得された航法メッセージからエフェメリスデータを抽出して、この抽出されたエフェメリスデータを用いて測位を行う例を示した。ここで、GPSを用いて行われる測位では、予測エフェメリスデータを用いて測位を行うことも可能である。ここでいう予測エフェメリスデータとは、GPS衛星から送信される航法メッセージ中のエフェメリスデータ(過去に取得したものも含む)に基づいて、将来的に予測される衛星軌道を算出したデータを意味する。そこで、本発明の第3の実施の形態では、航法メッセージから抽出されたエフェメリスデータとともに、予測エフェメリスデータを用いて測位を行う場合を例にして説明する。なお、予測エフェメリスデータは、上述の通り、航法メッセージから抽出されたエフェメリスデータに基づいて生成されるデータであり、例えば、過去のエフェメリスデータに基づいて予測エフェメリスデータが生成される。例えば、予測エフェメリスデータの取得方法として、ネットワーク(有線または無線)経由または記録媒体経由により、既に生成されている予測エフェメリスデータを外部から撮像装置100にダウンロードして取得する取得方法を用いることができる。また、撮像装置100がGPS衛星から受信したエフェメリスデータに基づいて、ホスト制御部130またはGPS制御部121が予測エフェメリスデータを算出して取得するようにしてもよい。また、本発明の第3の実施の形態における構成については、本発明の第1の実施の形態と略同様であるため、以下では、異なる点を中心にして説明し、共通する部分については同一の符号を付してこれらの説明の一部を省略する。
【0155】
[位置取得モードの指定画面の表示例]
図13は、本発明の第3の実施の形態における表示部160の表示例(位置取得モード指定画面410)を示す図である。位置取得モード指定画面410は、図6に示す位置取得モード指定画面400の変形例であり、撮影モードの設定時における位置取得モードを指定するための画面である。このため、位置取得モード指定画面400と共通する部分には、同一の符号を付して、これらの説明を省略する。
【0156】
位置取得モード指定画面410には、「アシストデータ優先モード」ボタン407および「予測Eph.優先モード」ボタン408が設けられている。
【0157】
「アシストデータ優先モード」ボタン407は、アシストデータ優先モードを指定する場合に押下されるボタンである。アシストデータ優先モードは、予測エフェメリスデータ等の、時刻に対応したGPS衛星の軌跡に関するデータ(アシストデータ)を優先使用して位置更新モードにおける間欠動作を行うモードである。ここでいうアシストデータとは、少なくとも時刻に対応してGPS衛星の軌跡を予測したデータであればよく、例えば、上述した予測エフェメリスデータである。また、アシストデータとして、例えば、GPS衛星から取得されたエフェメリスデータに基づかずに、時刻に対応してGPS衛星の軌跡を予測したデータを用いるようにしてもよい。アシストデータ優先モードの特徴は、測位に十分な予測エフェメリスデータが存在する場合には、GPS衛星から放送されている航法メッセージの取得を行わないことである。また、測位の精度や測位時間は、実際のエフェメリスデータを用いる場合よりも劣るが、位置情報を取得することは可能である。さらに、エフェメリスデータの取得中(例えば、図14に示すステップS911の処理手順(Eph.取得モード連続動作))の消費電力を削減することができる。
【0158】
「衛星Eph.優先モード」ボタン408は、衛星Eph.優先モードを指定する場合に押下されるボタンである。衛星Eph.優先モードは、予測エフェメリスデータが存在する場合においても、GPS衛星から放送されるエフェメリスデータの取得を行うモードである。この衛星Eph.優先モードが設定されている場合における処理手順は、図9に示す処理手順と同一となる。ただし、予測エフェメリスデータが存在するため、衛星補足モードにおいて、衛星補足が難しい環境下での衛星補足時間を短縮することができる。これにより、エフェメリスデータ取得モードへの遷移回数を増やすことができる。また、予測エフェメリスデータにより、コールドスタートまたはウォームスタート時においても、最も早く位置情報を取得することができる。このため、使用時の最初の測位までユーザを待たせることが減少し、ユーザに与えるストレスを軽減させることができる。
【0159】
[撮像装置の動作例]
図14は、本発明の第3の実施の形態における撮像装置100による測位処理の処理手順の一例を示すフローチャートである。この例では、図13に示す位置取得モード指定画面410における「アシストデータ優先モード」ボタン407の押下により、アシストデータ優先モードが設定されている場合を例にして説明する。また、図14に示す処理手順は、図9に示す処理手順の変形例であり、ステップS930を追加した点のみが異なる。そこで、以下では、図9に示す処理手順と異なる点を中心にして説明し、共通する部分については同一の符号を付してこれらの説明の一部を省略する。
【0160】
GPSモジュール120が、衛星捕捉モードにおける間欠動作を実行した後に(ステップS903)、GPSモジュール120に予測エフェメリスデータが保持されているか否かを判断する(ステップS930)。GPSモジュール120に測位に十分な予測エフェメリスデータが保持されている場合には(ステップS930)、GPSモジュール120が、その予測エフェメリスデータを用いて位置更新モードにおける間欠動作を実行する(ステップS908)。この場合についても、例えば、位置更新動作の実行状態を3秒間とし、位置更新動作のオフ状態を12秒間とすることができる。
【0161】
また、GPSモジュール120に測位に十分な予測エフェメリスデータが保持されていない場合には(ステップS930)、ステップS904に進む。
【0162】
<4.変形例>
本発明の第1乃至第3の実施の形態では、位置演算プロセッサをGPS制御部に内蔵する例を示した。しかしながら、位置演算プロセッサについては、GPS制御部の外部に設けるようにしてもよい。そこで、以下では、位置演算プロセッサをGPS制御部の外部に設ける例を示す。また、以下では、本発明の第1乃至第3の実施の形態の他の変形例を示す。なお、以下で示すGPSモジュールまたは制御部は、図3に示すGPSモジュール120またはホスト制御部130の変形例であり、一部を変形したものである。このため、以下では、図3に示すGPSモジュール120またはホスト制御部130と異なる点を中心にして説明し、共通する部分については同一の符号を付してこれらの説明の一部を省略する。
【0163】
[GPSモジュールの構成例]
図15は、本発明の第1の実施の形態の変形例におけるGPSモジュール500の内部構成例を示す図である。GPSモジュール500は、図3に示すGPS制御部121に内蔵されている位置演算プロセッサ128を、GPSモジュール120内においてGPS制御部121の外部に設けたものである。また、GPSモジュール500は、図3に示すGPSモジュール120に内蔵されている通信分離回路124を、GPSモジュール120の外部に設けたものである。GPS制御部510は、例えば、GPS衛星からの信号補足、航法メッセージの受信、デコード、デコードされた航法メッセージの送信を行うことができるが、位置演算を行うことができないHost BasedタイプのGPS ICである。このため、GPS制御部510は、位置演算を行うプロセッサ(例えば、位置演算プロセッサ502)を外部に設ける必要がある。この外部に設けられた位置演算プロセッサ502により、航法データに基づいて位置の算出を行うことができる。なお、信号線512は、図3に示す信号線207に対応し、信号線513は、図3に示す信号線204に対応し、信号線514は、図3に示す信号線215に対応し、信号線515は、図3に示す信号線216に対応する。また、位置演算プロセッサ502には、発振子511が設けられている。
【0164】
例えば、信号線509および508、通信分離回路501を介して、ホスト制御部130から位置演算プロセッサ502にコマンドが送信される。また、信号線507を介して、位置演算プロセッサ502からGPS制御部510にコマンドが送信される。
【0165】
また、信号線506を介して、GPS制御部510がGPS衛星から受信してデコードした航法メッセージを、GPS制御部510から位置演算プロセッサ502に送信する。また、信号線505および504、通信分離回路501を介して、位置演算プロセッサ502により算出された位置情報が、位置演算プロセッサ502からホスト制御部130に送信される。また、信号線503は、図3に示す信号線210に対応する。なお、位置演算プロセッサ502は、位置演算以外の処理を行うようにしてもよい。例えば、位置演算プロセッサ502が常時電源にてオン/スタンバイの2ステートにて動作する場合には、位置演算プロセッサ502が電源制御論理回路の代わりを行うことも可能である。
【0166】
なお、図15に示す例では、位置演算プロセッサをGPSモジュール500内に設けた例を示したが、例えば、位置演算プロセッサをGPSモジュール500の外部に設けるようにしてもよい。例えば、ホスト制御部130に位置演算を行うプロセッサを設けるようにしてもよく、位置演算を行うプロセッサをホスト制御部130およびGPSモジュール500の外部に設けるようにしてもよい。
【0167】
[GPSモジュールの構成例]
図16は、本発明の第1の実施の形態の変形例におけるGPSモジュール540の内部構成例を示す図である。GPSモジュール540は、図3に示すGPSモジュール120における信号線210の代わりに、信号線541を設けたものである。すなわち、ホスト制御部130のホスト側準備通知ポートから出力された制御信号を、GPS制御部121のホスト状態監視ポートに入力させずに、通信分離回路124にのみ入力させる。
【0168】
例えば、所定間隔(例えば、1秒間隔)で、通信分離回路124を介してホスト制御部130からGPS制御部121に、ホスト側の状態を示す状態通知を含む通信を行う。これにより、GPS制御部121がホスト側の状態を把握することができるため、GPS制御部121のホスト状態監視ポートを省略することができる。
【0169】
[GPSモジュールの構成例]
図17は、本発明の第1の実施の形態の変形例におけるGPSモジュール550の内部構成例を示す図である。GPSモジュール550は、図3に示すGPS制御部121に内蔵されているRTC125の代わりに、GPS制御部557の外部にRTC551を設けたものである。なお、信号線553は信号線204に対応し、電源供給線554は電源供給線205に対応し、信号線555は信号線207に対応する。また、RTC551には発振子552が設けられ、GPS制御部557およびRTC551間において各種通信を行うための通信線556が設けられる。
【0170】
このように、RTCについては、GPS制御部557の外部に設けるようにしてもよい。また、RTCの代わりに、時間を管理することができる他の計時回路を用いるようにしてもよい。
【0171】
[GPSモジュールの構成例]
図18は、本発明の第1の実施の形態の変形例におけるGPSモジュール560の内部構成例を示す図である。GPSモジュール560は、図3に示す電源スイッチ123の代わりに、電源IC561を設けたものである。電源IC561は、EN(イネーブル)機能を備える電源回路であり、電源制御論理回路122からの制御に基づいてバッテリ200からGPSモジュール120への電源供給のオン/オフを切り替える。電源IC561は、DC/DCコンバータやLDO(Low Drop Out Regulator)等により構成される。電源IC561としてDC/DCコンバータを用いる場合、バッテリ200とGPS制御部121の動作保証電圧範囲に応じて、降圧タイプ・昇圧タイプ・昇/降圧タイプのうち適切なDC/DCコンバータを用いることが好ましい。これにより、バッテリ200電圧の監視を不要とすることができる。また、電源IC561としてLDOを用いる場合において、GPS制御部121の動作保証電圧範囲に応じて選択されたLDO出力電圧よりもバッテリ200電圧範囲が低い場合には、バッテリ200電圧の監視は必要となる。なお、電源IC561は、特許請求の範囲に記載の切替部の一例である。
【0172】
このように、電源スイッチ以外の電源回路を用いてバッテリ200からGPSモジュール120への電源供給のオン/オフを切り替えるようにしてもよい。また、電源IC561の代わりに、複数の回路により構成される電源ブロックを用いるようにしてもよい。この電源ブロックとして、外部フロントコントローラにより各電源ポート制御を行えるものを用いることができ、この場合には、例えば、ホスト制御部と同一の構成とすることができる。
【0173】
[GPSモジュールの構成例]
図19は、本発明の第1の実施の形態の変形例におけるGPSモジュール570の内部構成例を示す図である。GPSモジュール570は、図3に示すバッテリ200と電源スイッチ123との間に、DC/DCコンバータ571を設けたものである。
【0174】
また、DC/DCコンバータ571として、バッテリ200とGPS制御部121の動作保証電圧範囲に応じて、降圧タイプ・昇圧タイプ・昇/降圧タイプのうち適切なDC/DCコンバータを用いることが好ましい。このようなDC/DCコンバータを、バッテリ200と電源スイッチ123との間に設けることにより、電圧の監視を不要とすることができる。
【0175】
[GPSモジュールの構成例]
図20は、本発明の第1の実施の形態の変形例におけるGPSモジュール580の内部構成例を示す図である。GPSモジュール580は、図3に示す電源スイッチ123の代わりに、DC/DCコンバータ581を設けたものである。DC/DCコンバータ581として、バッテリ200とGPS制御部121の動作保証電圧範囲に応じて、降圧タイプ・昇圧タイプ・昇/降圧タイプのうち適切なDC/DCコンバータを用いることが好ましい。また、DC/DCコンバータ581は、EN機能を備える電源回路であり、電源制御論理回路122からの制御に基づいて、バッテリ200からGPSモジュール120への電源供給のオン/オフを切り替える。なお、DC/DCコンバータ581は、特許請求の範囲に記載の切替部の一例である。
【0176】
このように、電源スイッチ以外の電源回路を用いてバッテリ200からGPSモジュール120への電源供給のオン/オフを切り替えるようにしてもよい。なお、DC/DCコンバータ581の代わりに、LDOを設けるようにしてもよいが、この場合には、バッテリ200電圧範囲と、GPS制御部121の動作保証電圧範囲の関係から、電源監視が必要な場合もある。
【0177】
なお、本発明の実施の形態では、測位部として、GPSシステムを用いる場合を例にして説明したが、無線通信手段を用いる他の測位システムに、本発明の実施の形態を適用するようにしてもよい。例えば、周囲に存在するWLAN(Wireless Local Area Network)によるアクセスポイント情報を用いて位置情報を導き出す測位システムに、本発明の実施の形態を適用するようにしてもよい。
【0178】
また、本発明の実施の形態では、エフェメリスデータをGPSモジュールのGPSアンテナにより取得する例を示したが、これに限らず、他の受信方法により受信して取得するようにしてもよい。例えば、サーバに保存されているエフェメリスデータを所定のネットワークを介して通信部(無線通信部または有線通信部)により受信して取得するようにしてもよい。この場合には、例えば、その通信部はGPSモジュールの中に配置することができる。なお、その通信部は、特許請求の範囲に記載の受信部の一例である。また、その通信部を用いてエフェメリスデータを取得する場合には、その取得中の動作を特定動作とすることができる。
【0179】
また、測位部を備える電子機器(例えば、撮像機能付き携帯電話機、ナビゲーションシステム、携帯型メディアプレイヤー)や、測位部を制御する電子機器に本発明の実施の形態を適用することができる。例えば、測位部を備える撮像機能付き携帯電話機に本発明の実施の形態を適用する場合には、測位情報を用いる特定処理を撮影モードとし、特定処理以外の処理を通話モード、コンテンツ再生モード等とすることができる。
【0180】
なお、本発明の実施の形態は本発明を具現化するための一例を示したものであり、本発明の実施の形態において明示したように、本発明の実施の形態における事項と、特許請求の範囲における発明特定事項とはそれぞれ対応関係を有する。同様に、特許請求の範囲における発明特定事項と、これと同一名称を付した本発明の実施の形態における事項とはそれぞれ対応関係を有する。ただし、本発明は実施の形態に限定されるものではなく、本発明の要旨を逸脱しない範囲において実施の形態に種々の変形を施すことにより具現化することができる。
【0181】
また、本発明の実施の形態において説明した処理手順は、これら一連の手順を有する方法として捉えてもよく、また、これら一連の手順をコンピュータに実行させるためのプログラム乃至そのプログラムを記憶する記録媒体として捉えてもよい。この記録媒体として、例えば、CD(Compact Disc)、MD(MiniDisc)、DVD(Digital Versatile Disk)、メモリカード、ブルーレイディスク(Blu-ray Disc(登録商標))等を用いることができる。
【符号の説明】
【0182】
100 撮像装置
111 撮像部
112 記録再生部
113 記録媒体
120、500、520、540、550、560、570、580、600 GPSモジュール
121、510、521、557、610 GPS制御部
122、620 電源制御論理回路
123 電源スイッチ
124、501、522 通信分離回路
125、551、611 RTC
126、127、511、552 発振子
127 発振器
128、502、532 位置演算プロセッサ
130、530 ホスト制御部
141 ROM
142 RAM
150 操作受付部
151 操作受付I/F部
152 シャッターボタン
160 表示部
161 表示制御部
170 メモリカード
171 メモリI/F部
180 通信I/F部
190 バス
200 バッテリ
310 操作受付部
320 撮像装置のモード設定部
330 使用要否判定部
340 動作制御部
350 電源供給部
360 測位部
531 コアプロセッサ
561 電源IC
571、581 DC/DCコンバータ
630 間欠制御論理回路
【技術分野】
【0001】
本発明は、電子機器に関し、特に、測位情報を扱う電子機器、測位デバイスおよびこれらにおける処理方法ならびに当該方法をコンピュータに実行させるプログラムに関する。
【背景技術】
【0002】
近年、人物や風景等の被写体を撮像して画像データを生成し、この生成された画像データを画像コンテンツ(画像ファイル)として記録するデジタルスチルカメラ、デジタルビデオカメラ(例えば、カメラ一体型レコーダ)等の撮像装置が普及している。また、生成された画像データに、その撮像時における位置に関する位置情報を関連付けて記録することが可能な撮像装置が提案されている。例えば、GPS(Global Positioning System)デバイスを備え、このGPSデバイスにより取得された位置情報を、生成された画像データに関連付けて記録する撮像装置が提案されている。
【0003】
また、近年では、ユーザが容易に携帯することができる小型の撮像装置が普及している。このような携帯可能な撮像装置は、バッテリ駆動により動作するものが多く、その動作時間を長くすることが重要となる。このため、GPSデバイスによる位置情報の取得についても、消費電力を抑制する方法が提案されている。
【0004】
ここで、GPSデバイスにより位置情報を取得する場合には、GPSデバイスに保持されている情報(軌道情報(エフェメリス(Ephemeris)データ)、時刻情報等)に応じて、測位に要する時間が異なる。例えば、GPSデバイスがエフェメリスデータおよび時刻情報を保持している場合には、GPSデバイスは、保持されている情報を用いてホットスタート(Hot Start)により起動して測位を行うことができる。一方、GPSデバイスがエフェメリスデータを保持していない場合には、GPSデバイスは、保持されている情報を用いてコールドスタート(Cold Start)またはウォームスタート(Warm Start)により起動して測位を行う。すなわち、エフェメリスデータを保持していないが時刻情報を保持している場合には、GPSデバイスは、ウォームスタートにより起動して測位を行う。また、エフェメリスデータおよび時刻情報の何れも保持していない場合には、GPSデバイスは、コールドスタートにより起動して測位を行う。
【0005】
なお、ホットスタートは、起動から測位までに要する時間が比較的短い(数秒程度)のに対して、コールドスタートまたはウォームスタートは、起動から測位までに要する時間が比較的長くなる(30秒以上)。このため、GPSデバイスの起動後、速やかに位置情報を取得したい場合には、ホットスタートにより起動することができる状態を維持することが重要である。しかしながら、エフェメリスデータの有効時間は4時間とされている。ただし、約2時間で同じ地点から見える衛星が変わることから、一般にエフェメリスデータの有効時間は2時間とされている。
【0006】
そこで、例えば、撮影頻度を監視して、この撮影頻度に基づいて、GPSデバイスに対する電源供給を制御する情報処理装置が提案されている(例えば、特許文献1参照。)。この情報処理装置は、例えば、撮影頻度が予め定めた閾値未満である場合には、GPSデバイスに対する間欠的な電源供給を行い、撮影頻度が予め定めた閾値以上である場合には、GPSデバイスに対する継続的な電源供給を行う。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開2007−155577号公報(図1)
【発明の概要】
【発明が解決しようとする課題】
【0008】
上述の従来技術によれば、GPSデバイスにおける無駄な電力消費を防止してバッテリの消費を抑え、迅速に位置情報を取得することができる。
【0009】
ここで、例えば、撮像装置により静止画の撮影が行われる場合には、撮影毎に電源のオン/オフが繰り返し行われることが想定される。例えば、静止画の撮影を行う場合には、撮像装置の電源をオンして所望の場所で1または複数枚の静止画の撮影を行い、この撮影の直後に撮像装置の電源をオフすることが想定される。このため、例えば、1日に複数の観光地を巡る旅行に行った場合には、静止画の撮影が継続して行われるとともに、撮像装置の電源のオン/オフ操作が繰り返し行われることが想定される。
【0010】
しかしながら、上述の従来技術では、撮影頻度が予め定めた閾値未満である場合には、ユーザによる撮影行為が継続されていないと判定されるまでの間、撮像装置の電源のオン/オフ状態とは独立して、GPSデバイスが間欠的な測位動作を行う。このため、撮像装置の電源がオフ状態とされている場合でも、GPSデバイスが間欠的な測位動作を行う。この場合には、撮像装置の電源がオフ状態とされているにもかかわらず、GPSデバイスによる間欠的な測位動作により電力が消費されることになる。また、撮像装置の電源がオン状態とされている場合でも、GPSデバイスによる測位動作が行われないことも想定される。そこで、撮像装置の電源がオフ状態とされている場合等のようにGPSデバイスを用いない場合における消費電力を削減するとともに、撮像装置の使用時には適切な測位を行うことが重要である。
【0011】
本発明はこのような状況に鑑みてなされたものであり、消費電力を削減するとともに、適切な測位を行うことを目的とする。
【課題を解決するための手段】
【0012】
本発明は、上記課題を解決するためになされたものであり、その第1の側面は、測位処理のために必要な測位情報を外部から受信する受信部と、ユーザによる操作入力が受け付けられた場合に当該操作入力に基づく処理が上記測位情報を用いる特定処理であるか否かを判定する判定部と、上記判定部による判定結果および上記受信部の動作内容に基づいて上記受信部の動作制御を行う制御部とを具備する電子機器およびその情報処理方法ならびに当該方法をコンピュータに実行させるプログラムである。これにより、ユーザ操作により受け付けられた操作入力に基づく処理が特定処理であるか否かを判定し、この判定結果および受信部の動作内容に基づいて、受信部の動作制御を行うという作用をもたらす。
【0013】
また、この第1の側面において、上記制御部は、上記操作入力に基づく処理が上記特定処理であると上記判定部により判定された場合には上記受信部を動作させるように制御を行い、上記操作入力に基づく処理が上記特定処理でないと上記判定部により判定された場合において、上記受信部が特定動作を行う第1のモードである場合には当該特定動作が終了するまで上記受信部を上記第1のモードにて動作させるように制御を行い当該特定動作の終了後に上記受信部の動作を上記第1のモードよりも消費電力が小さい第2のモードに遷移させるように制御を行い、上記受信部が上記第1のモードでない場合には上記受信部を上記第2のモードに遷移させるように制御を行うようにしてもよい。これにより、操作入力に基づく処理が特定処理であると判定された場合には受信部を動作させるように制御を行い、操作入力に基づく処理が特定処理でないと判定された場合において、受信部が第1のモードである場合にはその特定動作が終了するまで受信部を第1のモードにて動作させるように制御を行いその特定動作の終了後に受信部の動作を第2のモードに遷移させるように制御を行い、受信部が第1のモードでない場合には受信部を第2のモードに遷移させるように制御を行うという作用をもたらす。
【0014】
また、この第1の側面において、上記制御部は、上記操作入力に基づく処理が上記特定処理であると上記判定部により判定された場合には上記受信部を動作させるように制御を行い、上記操作入力に基づく処理が上記特定処理でないと上記判定部により判定された場合には上記受信部の動作内容に基づいて上記受信部の動作停止制御を行うようにしてもよい。これにより、操作入力に基づく処理が特定処理であると判定された場合には、受信部を動作させるように制御を行い、操作入力に基づく処理が特定処理でないと判定された場合には、受信部の動作内容に基づいて、受信部の動作停止制御を行うという作用をもたらす。
【0015】
また、この第1の側面において、上記制御部は、上記操作入力に基づく処理が上記特定処理でないと上記判定部により判定された場合において、上記受信部が特定動作を行っている場合には当該特定動作が終了するまで上記受信部を動作させるように制御を行い当該特定動作の終了後に上記受信部の動作を停止させるように制御を行い、上記受信部が上記特定動作を行っていない場合には上記受信部の動作を停止させるように制御を行うようにしてもよい。これにより、操作入力に基づく処理が特定処理でないと判定された場合において、受信部が特定動作を行っている場合には、その特定動作が終了するまで受信部を動作させるように制御を行いその特定動作の終了後に受信部の動作を停止させるように制御を行い、受信部が特定動作を行っていない場合には、受信部の動作を停止させるように制御を行うという作用をもたらす。
【0016】
また、この第1の側面において、上記受信部を、GPSにより上記測位情報を取得するGPSシステムにより構成し、上記特定動作を、エフェメリスデータを取得することを目的とする動作またはGPS衛星を捕捉することを目的とする動作の何れかとするようにしてもよい。これにより、GPSシステムにおける動作内容に基づいて、GPSシステムの動作制御を行うという作用をもたらす。
【0017】
また、この第1の側面において、上記受信部は、エフェメリスデータを取得することを目的とする動作を行うエフェメリスデータ取得モードと、GPS衛星を捕捉することを目的とする動作を一定間隔毎に間欠的に行う衛星捕捉モードと、上記測位情報に基づいて算出される位置情報の更新を行うことを目的とする動作を一定間隔毎に間欠的に行う位置更新モードとの何れかの動作モードが設定され、上記制御部は、上記操作入力に基づく処理が上記特定処理でないと上記判定部により判定された場合において、上記位置更新モードが設定されている場合には上記受信部の動作を停止させるように制御を行い、上記エフェメリスデータ取得モードまたは上記衛星捕捉モードが設定されている場合には当該設定されているモードに係る上記特定動作が終了するまで上記受信部を動作させるように制御を行い当該特定動作の終了後に上記受信部の動作を停止させるように制御を行うようにしてもよい。これにより、操作入力に基づく処理が特定処理でないと判定された場合において、位置更新モードが設定されている場合には、受信部の動作を停止させるように制御を行い、エフェメリスデータ取得モードまたは衛星捕捉モードが設定されている場合には、その設定されているモードに係る特定動作が終了するまで受信部を動作させるように制御を行いその特定動作の終了後に受信部の動作を停止させるように制御を行うという作用をもたらす。
【0018】
また、この第1の側面において、上記制御部は、上記操作入力に基づく処理が上記特定処理でないと上記判定部により判定され、上記衛星捕捉モードが設定されている場合において、GPS衛星を捕捉することを目的とする動作が実行されている場合には当該衛星捕捉動作が終了するまで上記受信部を動作させるように制御を行い当該衛星捕捉動作の終了後に上記受信部の動作を停止させるように制御を行い、GPS衛星を捕捉することを目的とする動作が実行されていない場合には上記受信部の動作を停止させるように制御を行うようにしてもよい。これにより、操作入力に基づく処理が特定処理でないと判定され、衛星捕捉モードが設定されている場合において、衛星捕捉動作が実行されている場合には、その衛星捕捉動作が終了するまで受信部を動作させるように制御を行いその衛星捕捉動作の終了後に受信部の動作を停止させるように制御を行い、衛星捕捉動作が実行されていない場合には、受信部の動作を停止させるように制御を行うという作用をもたらす。
【0019】
また、この第1の側面において、上記制御部は、上記操作入力に基づく処理が上記特定処理でないと上記判定部により判定され、上記衛星捕捉モードが設定されている場合において、GPS衛星を捕捉することを目的とする動作の終了時にエフェメリスデータの取得基準を満たしている場合には上記エフェメリスデータ取得モードに遷移してエフェメリスデータを取得することを目的とする動作が終了するまで上記受信部を動作させるように制御を行い当該取得動作の終了後に上記受信部の動作を停止させるように制御を行うようにしてもよい。これにより、操作入力に基づく処理が特定処理でないと判定され、衛星捕捉モードが設定されている場合において、その衛星捕捉動作の終了時にエフェメリスデータの取得基準を満たしている場合には、エフェメリスデータ取得モードに遷移してその取得動作が終了するまで受信部を動作させるように制御を行いその取得動作の終了後に受信部の動作を停止させるように制御を行うという作用をもたらす。
【0020】
また、この第1の側面において、被写体を撮像して画像データを生成する撮像部をさらに具備し、上記特定処理を、上記撮像部により生成された画像データに上記受信部により取得された上記測位情報に基づいて算出される位置情報を関連付けて記録する処理とするようにしてもよい。これにより、操作入力に基づく処理が、撮像部により生成された画像データに受信部により算出される位置情報を関連付けて記録する処理であるか否かに基づいて、受信部への電源供給の制御を行うという作用をもたらす。
【0021】
また、この第1の側面において、上記特定処理を行うための撮影モードから上記特定処理以外の処理を行うための他のモードへの切替操作、または、上記他のモードから上記撮影モードへの切替操作を上記操作入力として受け付ける操作受付部をさらに具備し、上記判定部は、上記撮影モードから上記他のモードへの切替操作が上記操作入力として受け付けられた場合には当該操作入力に基づく処理が上記特定処理でないと判定し、上記他のモードから上記撮影モードへの切替操作が上記操作入力として受け付けられた場合には当該操作入力に基づく処理が上記特定処理であると判定するようにしてもよい。これにより、撮影モードから他のモードへの切替操作が受け付けられた場合には、その操作入力に基づく処理が特定処理でないと判定し、他のモードから撮影モードへの切替操作が受け付けられた場合には、その操作入力に基づく処理が特定処理であると判定するという作用をもたらす。
【0022】
また、この第1の側面において、上記電子機器の電源をオフする電源オフ操作を上記操作入力として受け付ける操作受付部をさらに具備し、上記判定部は、上記電源オフ操作が上記操作入力として受け付けられた場合には当該操作入力に基づく処理が上記特定処理でないと判定するようにしてもよい。これにより、電源オフ操作が受け付けられた場合には、その操作入力に基づく処理が特定処理でないと判定するという作用をもたらす。
【0023】
また、この第1の側面において、電源供給線を介して上記受信部に主電源を供給する電源供給部と、上記電源供給線におけるオン/オフを切り替える切替部および制御信号線によるオン/スタンバイを切り替える切替部のうちの少なくとも1つの切替部とをさらに具備し、上記制御部は、上記切替部を制御することにより上記受信部の動作制御を行うようにしてもよい。これにより、切替部を制御することにより受信部の動作制御を行うという作用をもたらす。
【0024】
また、本発明の第2の側面は、測位処理のために必要な測位情報を外部から受信する受信部と、電子機器における状態が変化した場合に当該変化後の状態において行われる処理が上記測位情報を用いる特定処理であるか否かを判定する判定部と、上記判定部による判定結果および上記受信部の動作内容に基づいて上記受信部の動作制御を行う制御部とを具備する電子機器およびその情報処理方法ならびに当該方法をコンピュータに実行させるプログラムである。これにより、電子機器における状態が変化した場合に、その変化後の状態において行われる処理が特定処理であるか否かを判定し、この判定結果および受信部の動作内容に基づいて、受信部の動作制御を行うという作用をもたらす。
【0025】
また、この第2の側面において、上記判定部は、上記変化後の状態が待機状態となった場合には当該変化後の状態において行われる処理が上記特定処理でないと判定し、上記制御部は、上記変化後の状態において行われる処理が上記特定処理であると上記判定部により判定された場合には上記受信部を動作させるように制御を行い、上記変化後の状態において行われる処理が上記特定処理でないと上記判定部により判定された場合には上記受信部の動作内容に基づいて上記受信部の動作停止制御を行うようにしてもよい。これにより、変化後の状態が待機状態(例えば、スタンバイ状態)となった場合には、その変化後の状態において行われる処理が特定処理でないと判定し、変化後の状態において行われる処理が特定処理であると判定された場合には、受信部を動作させるように制御を行い、変化後の状態において行われる処理が特定処理でないと判定された場合には、受信部の動作内容に基づいて受信部の動作停止制御を行うという作用をもたらす。
【0026】
また、本発明の第3の側面は、測位処理のために必要な測位情報を外部から受信する受信部と、ユーザによる操作入力が受け付けられた場合に当該操作入力に基づく処理が上記測位情報を用いる特定処理であるか否かを示す所定情報を取得する取得部と、上記取得された所定情報および当該所定情報の取得時における動作内容に基づいて動作を行うか否かの制御を行う制御部とを具備する測位デバイスおよびその情報処理方法ならびに当該方法をコンピュータに実行させるプログラムである。これにより、ユーザ操作により受け付けられた操作入力に基づく処理が特定処理であるか否かを示す所定情報(例えば、判定結果)を取得し、この所定情報およびこの取得時における動作内容に基づいて動作を行うか否かの制御を行うという作用をもたらす。
【発明の効果】
【0027】
本発明によれば、消費電力を削減するとともに、適切な測位を行うことができるという優れた効果を奏し得る。
【図面の簡単な説明】
【0028】
【図1】本発明の第1の実施の形態における撮像装置100の内部構成例を示すブロック図である。
【図2】本発明の第1の実施の形態におけるGPSモジュール120により取得される航法メッセージの構造を模式的に示す図である。
【図3】本発明の第1の実施の形態におけるGPSモジュール120の内部構成例を示す図である。
【図4】本発明の第1の実施の形態における電源制御論理回路122の制御内容を模式的に示す図である。
【図5】本発明の第1の実施の形態における撮像装置100の機能構成例を示すブロック図である。
【図6】本発明の第1の実施の形態における表示部160の表示例を示す図である。
【図7】本発明の第1の実施の形態における動作制御部340により測位部360の動作制御を行う場合を示すシーケンスチャートである。
【図8】本発明の第1の実施の形態における動作制御部340により測位部360の動作制御を行う場合を示すシーケンスチャートである。
【図9】本発明の第1の実施の形態における撮像装置100による測位処理の処理手順の一例を示すフローチャートである。
【図10】本発明の第1の実施の形態における撮像装置100による測位処理の処理手順の一例を示すフローチャートである。
【図11】本発明の第2の実施の形態におけるGPSモジュール600の内部構成例を示す図である。
【図12】本発明の第2の実施の形態における電源制御論理回路620の制御内容を模式的に示す図である。
【図13】本発明の第3の実施の形態における表示部160の表示例を示す図である。
【図14】本発明の第3の実施の形態における撮像装置100による測位処理の処理手順の一例を示すフローチャートである。
【図15】本発明の第1の実施の形態の変形例におけるGPSモジュール500の内部構成例を示す図である。
【図16】本発明の第1の実施の形態の変形例におけるGPSモジュール540の内部構成例を示す図である。
【図17】本発明の第1の実施の形態の変形例におけるGPSモジュール550の内部構成例を示す図である。
【図18】本発明の第1の実施の形態の変形例におけるGPSモジュール560の内部構成例を示す図である。
【図19】本発明の第1の実施の形態の変形例におけるGPSモジュール570の内部構成例を示す図である。
【図20】本発明の第1の実施の形態の変形例におけるGPSモジュール580の内部構成例を示す図である。
【発明を実施するための形態】
【0029】
以下、本発明を実施するための形態(以下、実施の形態と称する)について説明する。説明は以下の順序により行う。
1.第1の実施の形態(測位部の動作制御:ユーザ操作に基づく処理が測位情報を用いるか否かと、測位部における動作モードとに基づいて測位部の動作を制御する例)
2.第2の実施の形態(測位部の動作制御:間欠動作の間欠中に測位部をスタンバイ状態とする例)
3.第3の実施の形態(測位部の動作制御:予測エフェメリスデータを用いて位置更新を行う例)
4.変形例
【0030】
<1.第1の実施の形態>
[撮像装置の構成例]
図1は、本発明の第1の実施の形態における撮像装置100の内部構成例を示すブロック図である。撮像装置100は、撮像部111と、記録再生部112と、記録媒体113と、GPSモジュール120と、ホスト制御部130と、主電源IC(Integrated Circuit)131とを備える。また、撮像装置100は、ROM(Read Only Memory)141と、RAM(Random Access Memory)142と、操作受付部150と、操作受付I/F(インターフェース)部151とを備える。また、撮像装置100は、表示部160と、表示制御部161と、メモリカード170と、メモリI/F部171と、通信I/F部180とを備える。なお、撮像装置100を構成する各部の間で行われるやりとりは、主にバス190を介して行われる。また、撮像装置100は、例えば、GPSデバイスを備え、このGPSデバイスにより取得された位置情報を、生成された画像データに付加して記録することが可能なデジタルスチルカメラにより実現することができる。また、撮像装置100は、特許請求の範囲に記載の電子機器の一例である。
【0031】
撮像部111は、レンズ(図示せず)を介して入射された被写体の光を電気信号に変換する撮像素子(図示せず)と、この撮像素子の出力信号を処理して画像データ(撮像画像)を生成する信号処理部(図示せず)とを備える。すなわち、撮像部111において、レンズを介して入射された被写体の光学像が撮像素子の撮像面に結像され、この状態で撮像素子が撮像動作を行い、信号処理部が撮像信号に対して信号処理を行うことにより、画像データが生成される。この画像データの生成は、撮影モードが設定されている場合において、操作受付部150により受け付けられた撮像動作の開始指示情報に基づいて行われる。そして、生成された画像データが記録再生部112に順次供給される。
【0032】
記録再生部112は、コーデックおよび記録再生I/Fを備え、撮像部111から供給された画像データを画像ファイル(静止画ファイルまたは動画ファイル)として記録媒体113に記録させるものである。この記録時に、GPSモジュール120により取得された位置情報(最後に取得された位置情報)と、その記録時における日時情報とを含む属性情報が画像ファイルに記録される。この属性情報には、例えば、撮像時における各種情報(例えば、F値、ISO)を含めることができる。また、記録再生部112は、その記録された画像ファイルに関する画像管理情報を画像管理ファイルに記録させる。
【0033】
記録媒体113は、画像ファイル等の各データを記憶するものであり、記憶されている各データを記録再生部112に供給する。なお、記録媒体113に記憶されている画像ファイルは、例えば、Exif(Exchangeable image file format)規格の静止画ファイルである。また、この静止画ファイルの属性情報として位置情報、日時情報等が記録される。
【0034】
GPSモジュール120は、バッテリ200からの電源供給を受けて測位処理を行うものである。具体的には、GPSモジュール120は、GPSアンテナ(図示せず)により受信された複数のGPS衛星からの衛星信号を復調部(図示せず)により復調することにより航法メッセージ(図2に示す)を取得する。そして、GPSモジュール120は、取得された航法メッセージからエフェメリスデータを抽出して、この抽出されたエフェメリスデータを保持する。また、GPSモジュール120は、アルマナックデータ等についても同様に抽出して保持する。なお、エフェメリスデータは、各GPS衛星の正確な位置情報と信号を発射した時刻情報とに関するデータであり、アルマナックデータは、軌道上における全てのGPS衛星に関する軌道情報である。また、GPSモジュール120は、保持されているエフェメリスデータ等の測位情報を用いて測位処理を行うことにより現在位置を示す位置情報を算出し、この算出された位置情報を保持するとともに、ホスト制御部130に出力する。この測位情報は、位置情報の算出に用いられる各情報(GPS衛星から取得した各情報やこれらに基づいて取得された情報等であり、例えば、上述の航法メッセージを含む。)である。また、この測位情報は、GPSモジュール120のGPSアンテナまたは他の通信部(有線または無線通信手段(図示せず))により取得されるデータである。なお、算出された位置情報には、緯度、経度、高度等の位置に関する各データが含まれる。なお、GPSモジュール120の内部構成については、図3を参照して詳細に説明する。また、GPSモジュール120は、特許請求の範囲に記載の測位デバイスの一例である。
【0035】
ホスト制御部130は、ROM141に記憶されている各種制御プログラムに基づいて、撮像装置100における各処理(例えば、撮像画像生成処理、撮像画像記録処理、画像再生処理、通信処理)を行うものである。また、ホスト制御部130は、操作受付部150により受け付けられた操作入力等に基づいて撮像装置100の各部を制御する。
【0036】
ROM141は、読み出し専用のメモリであり、各種制御プログラム等を記憶するものである。
【0037】
RAM142は、ホスト制御部130のメインメモリ(主記憶装置)として用いられるメモリであり、ホスト制御部130において実行されるプログラムの作業領域等を備える。
【0038】
操作受付部150は、ユーザにより操作された操作内容を受け付ける操作受付部であり、受け付けられた操作内容に応じた信号を、操作受付I/F部151を介してホスト制御部130に出力する。例えば、撮像装置100の電源のオン/オフを行うための電源ボタンやシャッターボタン152(図6に示す)が撮像装置100に設けられている。
【0039】
表示部160は、表示制御部161の制御に基づいて、各種情報を表示する表示部である。表示部160として、例えば、LCD(Liquid Crystal Display)、有機EL(Electro Luminescence)パネル等を用いることができる。なお、操作受付部150および表示部160については、指等で触ることにより各種操作を行うことが可能なタッチパネルにより一体で構成するようにしてもよい。
【0040】
表示制御部161は、操作受付部150により受け付けられたユーザ操作およびホスト制御部130の制御に基づいて、各種情報を表示部160に表示させるものである。
【0041】
メモリカード170は、各種のデータ、プログラム等の記憶部として利用される記録媒体である。例えば、メモリI/F部171を介して供給された画像データが画像ファイルとしてメモリカード170に記録される。また、メモリカード170に記憶されている画像データは、操作受付部150により受け付けられたユーザからの操作入力に応じて、メモリI/F部171を介して読み出され、各部に供給される。
【0042】
通信I/F部180は、USB(Universal Serial Bus)等の入出力端子を備える通信インターフェースであり、外部コンピュータとの接続やネットワーク接続のためのインターフェースを提供する。なお、通信I/F部180として、有線および無線の何れのインターフェースを用いるようにしてもよい。
【0043】
バッテリ200は、撮像装置100の主電源であり、主電源IC131を介して各部に電源を供給する。また、バッテリ200は、GPSモジュール120に電源を供給する。
【0044】
ここで、本発明の第1の実施の形態では、撮像装置100において撮影モード、再生モード、通信モードおよび各種設定モードの何れかのモードがユーザ操作により設定されるものとする。撮影モードは、例えば、撮像部111により生成された画像データを静止画ファイルまたは動画ファイルとして記録媒体113またはメモリカード170に記録させる場合に設定されるモードである。なお、撮影モードでは、記録された画像データをプレビュー表示させることもできる。再生モードは、例えば、記録媒体113またはメモリカード170に記憶されている各データを表示部160に表示させる場合に設定されるモードである。通信モードは、例えば、通信I/F部180を介して撮像装置100と外部装置との間で各種通信を行う場合に設定されるモードである。各種設定モードは、例えば、メニュー画面において各種設定変更を行うためのモードである。
【0045】
また、本発明の第1の実施の形態では、撮影モードが設定されている場合には、GPSモジュール120の電源をオン状態とする。一方、撮影モード以外のモード(再生モード、通信モードまたは各種設定モード)が設定されている場合には、GPSモジュール120の電源をオフ状態、または、GPSモジュール120をスタンバイモードとする。なお、GPSモジュールのスタンバイモードについては、本発明の第2の実施の形態で説明する。また、例えば、撮影モードが設定されている場合において、他のモードに切り替える切替操作がされた場合、または、撮像装置100の電源がオフされた場合には、一定条件により、GPSモジュール120の電源を一定時間オン状態とする。これらの各制御については、図3乃至図8等を参照して詳細に説明する。
【0046】
[航法メッセージの構造]
図2は、本発明の第1の実施の形態におけるGPSモジュール120により取得される航法メッセージの構造を模式的に示す図である。この航法メッセージは、測距信号に乗せられて各GPS衛星から送信されるデータである。
【0047】
航法メッセージの1サイクルは、フレームという単位で称され、5組のサブフレームにより1フレームが構成されている。具体的には、航法メッセージは、サブフレーム#1(251)乃至#5(255)により1フレーム(1500ビット)が構成されている。なお、サブフレーム#1(251)乃至#5(255)は300ビットのサイズである。また、航法メッセージのデータ速度は、約50bps(Bits Per Second)であり、サブフレーム#1(251)から順番に送信が開始され、サブフレーム#5(255)の送信が終了すると、サブフレーム#1(251)の送信が再び開始される。すなわち、航法メッセージは、1フレームが30秒間繰り返し送信される。
【0048】
また、サブフレーム#1(251)乃至#3(253)は、衛星信号を送信しているGPS衛星の固有情報を含むサブフレームであり、30秒間隔で同じ内容が繰り返し送信される。具体的には、サブフレーム#1(251)には、GPS衛星の状態、クロック補正に関する情報が含まれ、サブフレーム#2(252)および#3(253)には、GPS衛星の軌道情報(エフェメリスデータ)が含まれる。
【0049】
エフェメリスデータは、GPS衛星がどのような軌道で周回しているかを示す詳細な軌道情報である。GPSモジュール120が、現在位置を正確に測位するためには、少なくとも4個のGPS衛星からエフェメリスデータを取得しておく必要がある。しかしながら、エフェメリスデータの有効時間は4時間とされている。ただし、約2時間で同じ地点から見えるGPS衛星が変わることから、一般にエフェメリスデータの有効時間は2時間とされている。そして、GPSモジュール120は、有効なエフェリメスデータと時刻情報を用いて、比較的短時間(例えば、3秒乃至5秒程度)で測位を行うことができる。具体的には、GPSモジュール120は、エフェメリスデータおよび4個のGPS衛星から撮像装置100までの距離データに基づいて、撮像装置100の現在位置を測位して、現在位置を示す位置情報を算出する。そして、GPSモジュール120は、その算出された位置情報を保持するとともに、ホスト制御部130に出力する。
【0050】
しかしながら、保持されているエフェリメスデータの有効時間が経過した場合には、新たにエフェリメスデータを取得する必要がある。ここで、上述したように、GPS衛星から約30秒周期でエフェメリスデータが送信されるため、新たなエフェリメスデータを取得するためには、最低でも30秒間以上の時間が必要である。
【0051】
また、サブフレーム#4(254)および#5(255)は、全てのGPS衛星に関する情報を含むサブフレームであり、全てのGPS衛星から同じ内容が送信される。なお、サブフレーム#4(254)および#5(255)には、全てのGPS衛星の概略衛星情報(アルマナックデータ)や電離層補正情報等が含まれる。また、サブフレーム#4(254)および#5(255)に含まれるデータ量が多いため、各データが1乃至25頁に分割されて格納される。すなわち、フレーム毎に異なる内容の頁(1乃至25頁)が順番に送信される。このため、サブフレーム#4(254)および#5(255)に含まれる全てのデータをGPS衛星から取得する場合には、12分30秒(30秒×25)を要する。
【0052】
なお、サブフレーム#4(254)には、電離層補正情報、協定世界時(UTC(Coordinated Universal Time)、概略衛星情報(アルマナックデータ)が含まれる。また、サブフレーム#5(255)には、概略衛星情報(アルマナックデータ)が含まれる。なお、アルマナックデータは、エフェメリスデータと比較すると精度が低いデータであるが、比較的古いデータでも用いることができる。例えば、数週間前のアルマナックデータでも有効である場合が多い。
【0053】
[GPSモジュールの構成例]
図3は、本発明の第1の実施の形態におけるGPSモジュール120の内部構成例を示す図である。図3では、図1に示すホスト制御部130およびバッテリ200を図示し、これらとGPSモジュール120との関係を模式的に示す。
【0054】
図4は、本発明の第1の実施の形態における電源制御論理回路122の制御内容を模式的に示す図である。図4に示す電源制御論理回路122の制御内容については、図3を参照して詳細に説明する。
【0055】
GPSモジュール120は、GPS制御部121と、電源制御論理回路122と、電源スイッチ123と、通信分離回路124とを備える。
【0056】
バッテリ200は、GPSモジュール120およびホスト制御部130に電源を供給するバッテリである。具体的には、バッテリ200は、電源供給線201、主電源IC131を介してホスト制御部130に電源(主電源)を供給し、電源供給線202、203を介してGPS制御部121に電源(主電源)を供給する。また、電源供給線202、203は、他のシステムとは異なった電源シーケンスが必要となるため、GPSモジュール120用の独立した電源供給線とする。
【0057】
GPS制御部121は、GPSモジュール120を制御する制御回路であり、RTC(Real Time Clock)125および位置演算プロセッサ128を内蔵する。また、GPS制御部121は、通信分離回路124を介してホスト制御部130との間で各種通信を行う。また、GPS制御部121は、ホスト制御部130からの制御に基づいて、不揮発性メモリ等のメモリ(図示せず)に記憶されている各種制御プログラムに従って測位処理を行う。この測位処理は、例えば、エフェメリスデータ取得モード、衛星捕捉モード、位置更新モードにおける各処理である。
【0058】
ここで、エフェメリスデータ取得モードは、GPS衛星から航法メッセージを取得し、この取得された航法メッセージからエフェメリスデータを抽出することを目的とする動作モードである。この動作では、航法メッセージの受信、GPS衛星の特定、衛星情報のホスト制御部130への送信等を行い、測位終了となった場合には位置情報をホスト制御部130に送信する。なお、エフェメリスデータ取得モードでは、エフェメリスデータとともに、測位に用いる他の情報についても抽出される。
【0059】
また、衛星捕捉モードは、GPS衛星からの衛星信号を探索し、上空に存在するGPS衛星を特定することを目的とする間欠動作モードである。この間欠動作時間は、コールドスタートしてから現在の状況において測位可能かを判断するために十分な時間とする。このため、間欠動作では、例えば、10秒から20秒程度の動作時間を必要とし、動作時間が比較的長い間欠動作モードとなる。また、この間欠動作では、航法メッセージの受信、GPS衛星の特定、衛星情報のホスト制御部130への送信等を行い、測位終了となった場合には位置情報をホスト制御部130に送信する。なお、本発明の第1の実施の形態では、GPS信号を捕捉してGPS衛星を特定することを「GPS衛星を捕捉する」と表現して説明する。
【0060】
また、位置更新モードは、現在位置を測位して順次更新することを目的とする間欠動作モードである。この位置更新モードは、ホットスタートが可能となった状態でのみ遷移する間欠動作モードであるため、その動作時間を比較的短い時間(例えば、5秒以下)とすることができる。また、この間欠動作では、航法メッセージを受信し、保持されているエフェメリスデータおよび時刻情報等を用いて測位処理を行い、測位結果をホスト制御部130に送信する。なお、GPS制御部121は、一定間隔(例えば、1秒間隔)毎に、測位結果をホスト制御部130に送信する機能を備える。また、この一定間隔毎の通信では、測位ができていない場合でも、現在補足できているGPS衛星の情報等をホスト制御部130に送信する。
【0061】
このように、本発明の第1の実施の形態では、GPSモジュール120における動作モードとして、衛星捕捉モードまたは位置更新モードが設定されている場合には、各動作について間欠動作を行う。この間欠動作については、その一例を図9に示す。
【0062】
RTC125は、電源が切られている間も、主電源IC131により生成される常時電源から電源供給線205を介して電源供給を受けて動作する計時専用の回路である。発振子126は、RTC125内に供給されるクロック信号を発生させるための振動源であり、例えば、水晶発振子(例えば、周波数:32.768k(Hz))が用いられる。
【0063】
位置演算プロセッサ128は、GPSモジュール120に保持されているエフェメリスデータおよび4個以上のGPS衛星から撮像装置100までの距離データに基づいて、撮像装置100の現在位置を算出するプロセッサである。この算出された現在位置を示す位置情報が、GPSモジュール120のメモリ(図示せず)に順次記録され、通信分離回路124を介してホスト制御部130に出力される。
【0064】
電源制御論理回路122は、GPS制御部121の電源のオン/オフを司る回路であり、例えば、ディスクリート半導体およびリニアICにより構成される。具体的には、電源制御論理回路122は、ホスト制御部130から出力された制御信号と、RTC125から出力された間欠動作時間制御信号および制御信号と、バッテリ200の電圧監視とに基づいて、GPS制御部121の電源のオン/オフを制御する。電源制御論理回路122は、例えば、GPS制御部121の電源のオン/オフを示す2値の制御信号を電源スイッチ123に出力し、電源スイッチ123の開閉を行う。電源スイッチ123は、例えば、FET(Field Effect Transistor)により構成され、電源スイッチ123の開閉により、GPS制御部121の電源のオン/オフが制御される。
【0065】
ここで、ホスト制御部130から出力される制御信号は、GPSモジュール120の電源をオンさせるためのトリガ(電源オントリガ)を示す制御信号であり、信号線206を介して入力される。この制御信号は、例えば、「H(High)」レベルおよび「L(Low)」レベルの制御信号とすることができる。また、この電源オントリガは、例えば、撮像装置100が測位情報を必要としている状態となった場合に、「H」レベルの制御信号が出力される。また、「H」を維持することにより、GPS制御部121が間欠動作中であっても、GPS制御部121に強制的に電源を供給してGPS制御部121を動作させることにより、モード遷移等のコマンドを確実にGPS制御部121へ送信することができる。なお、撮像装置100が測位情報を必要としている状態は、例えば、撮影モード以外の他のモードが設定されている場合において撮影モードに切り替える切替操作がされた場合、または、撮像装置100の電源がオンされ、撮影モードが設定されている場合である。
【0066】
また、RTC125から出力される制御信号は、ホスト制御部130がGPSモジュール120の起動を要求しているか否か(撮像装置100が測位情報を必要としている状態か否かを)を示す制御信号であり、信号線207を介して入力される。この制御信号は、例えば、「H」レベルおよび「L」レベルの制御信号とすることができる。なお、この制御信号は、信号線210を介して入力されるホスト制御部130からの通知に基づいて生成される。また、例えば、水晶発振子の出力を1.2Vに振幅に増幅して出力する32k_out端子は、アウトプットの有り無しの2ステートを備えるため、これを制御信号として用いることができ、電源制御論理回路122内でH/Lへ変換している。具体的には、32k_out端子のアウトプット有りは「L」に変換され、32k_out端子のアウトプット無しは「H」に変換される。以下では、説明の簡略化のため、電源制御論理回路122内での変換結果を信号線207からの出力として説明する。また、図4についても同様とする。
【0067】
また、RTC125から出力される間欠動作時間制御信号は、GPSモジュール120における動作内容を示す制御信号であり、信号線204を介して入力される。例えば、「H」レベルおよび「L」レベルの制御信号とすることができる。例えば、GPSモジュール120における動作モードがエフェメリスデータ取得モードである場合には、間欠動作時間制御信号として「H」レベルの制御信号が出力される。また、GPSモジュール120における動作モードが衛星捕捉モードである場合において、衛星捕捉動作を実行する期間(実行期間)である場合には、間欠動作時間制御信号として「H」レベルの制御信号が出力される。一方、衛星捕捉動作を実行しない期間(間欠期間)である場合には、間欠動作時間制御信号として「L」レベルの制御信号が出力される。また、GPSモジュール120における動作モードが位置更新モードである場合において、位置更新動作を実行する期間(実行期間)である場合には、間欠動作時間制御信号として「H」レベルの制御信号が出力される。一方、位置更新動作を実行しない期間(間欠期間)である場合には、間欠動作時間制御信号として「L」レベルの制御信号が出力される。
【0068】
電源スイッチ123は、電源制御論理回路122からの制御に基づいて、バッテリ200からGPSモジュール120への電源供給のオン/オフを切り替えるスイッチである。なお、電源スイッチ123は、特許請求の範囲に記載の切替部の一例である。
【0069】
ここで、図4を参照して、電源制御論理回路122による電源スイッチ123の制御について説明する。最も優先されるのは、電源供給線202の供給電圧であり、この電圧がGPS制御部121の動作保証電圧範囲外となった場合には、必ず電源スイッチ123が開くように制御される。そこで、以下では、電源供給線202の電圧がGPS制御部121の動作保証電圧範囲内である場合を想定して説明する。なお、図4に示す電源供給線202において、GPS制御部121の動作保証電圧範囲内については「*1」で示し、GPS制御部121の動作保証電圧範囲外については「*2」で示す。
【0070】
例えば、「H」レベルの制御信号が信号線206を介してホスト制御部130から出力された場合には、電源制御論理回路122は、電源スイッチ123を閉じる制御信号を電源スイッチ123に出力する。
【0071】
次に、例えば、RTC125から信号線207を介して「L」レベルの制御信号が出力されている場合を想定する。この場合において、信号線204を介して「H」レベルの制御信号が出力された場合には、電源制御論理回路122は、電源スイッチ123を閉じる制御信号を電源スイッチ123に出力する。これにより、GPSモジュール120に電源が供給される。一方、例えば、信号線204を介して「L」レベルの制御信号が出力されている場合には、電源制御論理回路122は、電源スイッチ123を開ける制御信号を電源スイッチ123に出力する。これにより、GPSモジュール120への電源供給が停止される。
【0072】
次に、例えば、信号線207を介して「H」レベルの制御信号が出力されている場合を想定する。この場合には、例えば、信号線204を介して「H」レベルの制御信号および「L」レベルの制御信号が出力されている場合でも、電源制御論理回路122は、その出力を「L」とし、電源スイッチ123を開ける制御信号を電源スイッチ123に出力する。これにより、GPSモジュール120への電源供給が停止される。
【0073】
次に、例えば、信号線207を介して「L」レベルの制御信号が出力されている場合を想定する。この場合には、信号線206および信号線204の何れか一方または両方から「H」レベルの制御信号が出力された場合に、電源スイッチ123を閉じる制御信号を電源スイッチ123に出力する。これにより、GPSモジュール120に電源が供給される。また、信号線206および信号線204の両方から「L」レベルの制御信号が出力された場合には、電源スイッチ123を開ける制御信号を電源スイッチ123に出力する。これにより、GPSモジュール120への電源供給が停止される。
【0074】
通信分離回路124は、通信線211および212、通信線213および214を開閉するための回路である。例えば、撮像装置100において、撮影モード以外のモードが設定されている場合には、ホスト制御部130(ホスト側)のみがオン状態となり、GPSモジュール120がオフ状態となる。また、例えば、撮影モードが設定されている場合において、撮像装置100の電源がオフされた場合には、GPSモジュール120のみがオン状態となり、ホスト制御部130(ホスト側)がオフ状態となることがある。このため、電源がオフ状態となっている回路に電圧を印加しないようにするため、通信分離回路124が通信線211および212、通信線213および214の開閉を行う。すなわち、通信分離回路124は、通信線211乃至214におけるスイッチに相当する回路である。なお、この例では、GPSモジュール120に通信分離回路124を備える例を示すが、ICの仕様によっては通信分離回路124を省略することも可能である。
【0075】
信号線210は、ホスト制御部130のホスト側準備通知ポートから出力され、GPS制御部121のホスト状態監視ポートおよび通信分離回路124に入力される制御信号を送るための信号線である。具体的には、信号線210は、ホスト制御部130がGPSモジュール120の起動を要求しているか否かをGPS制御部121に通知するとともに、通信分離回路124のホスト制御部130の受信側を開けるための制御信号を送る信号線である。この制御信号により、GPS制御部121からの送信データを受信することができる。例えば、「H」レベルおよび「L」レベルの制御信号とすることができる。例えば、ホスト制御部130がGPSモジュール120の起動を要求している場合には、「H」レベルの制御信号(通知情報)が信号線210を介して出力される。この通知情報は、ホスト制御部130がGPSモジュール120の起動を要求している間、「H」レベルの制御信号が出力される。
【0076】
ここで、信号線210を介してGPS制御部121のホスト状態監視ポートに入力された制御信号に基づいて、GPS制御部121が、信号線207を介して電源制御論理回路122に出力される制御信号を生成する。具体的には、「H」レベルの制御信号が信号線210を介して出力されている場合には、GPS制御部121が、信号線207を介して「L」レベルの制御信号を出力する。また、「L」レベルの制御信号が信号線210を介して出力されている場合には、GSPモジュール120における動作モードが確認される。例えば、GSPモジュール120における動作モードが位置更新モードである場合には、GPSモジュール120の電源供給を停止させるため、GPS制御部121が、信号線207を介して「H」レベルの制御信号を出力する。また、例えば、GSPモジュール120における動作モードが衛星捕捉モードであり動作中である場合、または、エフェメリスデータ取得モードである場合には、これらの動作が終了するまでの間、GPSモジュール120への電源供給を継続して行う。このため、GPS制御部121が、信号線207を介して「L」レベルの制御信号を出力する。
【0077】
通信線211乃至214は、ホスト制御部130およびGPS制御部121間における各種データの送受信を行うための信号線である。例えば、GPSモジュール120における動作モードを指示するコマンドが、通信線213および214を介してホスト制御部130からGPS制御部121に出力される。また、例えば、GPSモジュール120により算出された位置情報が、通信線212および211を介してGPS制御部121からホスト制御部130に出力される。なお、信号線211乃至214を介した通信には、UART(Universal Asynchronous Receiver Transmitter)等の通信回路を用いることができる。
【0078】
信号線215は、ホスト制御部130(ホスト側)からの送信データをGPSモジュール120が受信することができるように、通信分離回路124のGPS制御部121の受信側(GPS受信側)を開けるための制御信号を送る信号線である。例えば、「H」レベルの制御信号が送信されることにより、通信分離回路124のGPS制御部121の受信側(GPS受信側)が開けられる。例えば、通信分離回路124のGPS制御部121の受信側(GPS受信側)については、通常は、GPS制御部121が開放するが、GPS制御部121のファームウェアのアップロード時には、GPS側から開放することができないことも想定される。特に、ファームウェアの初回の書き込み時には、GPS側から開放することができないことが想定される。このため、例えば、「H」レベルの制御信号を信号線215を介して送信することにより、通信分離回路124のGPS制御部121の受信側(GPS受信側)を開けることができる。
【0079】
信号線216は、GPSモジュール120に電源が供給され、ホスト制御部130からのコマンドを受信することができる状態になった場合に、通信分離回路124のGPS制御部121の受信側(GPS受信側)を開けるための制御信号を送る信号線である。例えば、「H」レベルの制御信号を信号線216を介して送ることにより、通信分離回路124のGPS制御部121の受信側(GPS受信側)が開けられる。
【0080】
発振器127は、GPS制御部121内に供給されるクロック信号を発生させるための振動源であり、例えば、水晶発振器(TCXO)が用いられる。
【0081】
[撮像装置の機能構成例]
図5は、本発明の第1の実施の形態における撮像装置100の機能構成例を示すブロック図である。撮像装置100は、操作受付部310と、撮像装置のモード設定部320と、使用要否判定部330と、動作制御部340と、電源供給部350と、測位部360とを備える。
【0082】
操作受付部310は、ユーザからの操作入力を受け付ける操作受付部であり、受け付けられた操作入力に応じた操作内容を撮像装置のモード設定部320、使用要否判定部330および測位部360に出力する。例えば、操作受付部310は、撮像装置100の電源をオン/オフする電源操作が受け付けられた場合には、その操作内容を使用要否判定部330および測位部360に出力する。また、例えば、操作受付部310は、撮像装置100のモードを切り替える切替操作が受け付けられた場合には、その操作内容を撮像装置のモード設定部320に出力する。この切替操作は、例えば、撮影モードから他のモード(再生モード、通信モードまたは各種設定モード)への切替操作、または、他のモード(再生モード、通信モードまたは各種設定モード)から撮影モードへの切替操作である。なお、操作受付部310は、図1に示す操作受付部150に対応する。
【0083】
撮像装置のモード設定部320は、操作受付部310により受け付けられた切替操作に応じて、撮影モード、再生モード、通信モードおよび各種設定モードの何れかのモードを設定するものである。そして、撮像装置のモード設定部320は、その設定内容を使用要否判定部330および測位部360に出力する。なお、撮像装置のモード設定部320は、図1および図3に示すホスト制御部130に対応する。
【0084】
使用要否判定部330は、操作受付部310により操作入力が受け付けられた場合に、その操作入力に基づく処理が、測位部360により取得される測位情報を用いる処理(特定処理)であるか否かを判定するものである。すなわち、使用要否判定部330は、操作受付部310により操作入力が受け付けられた場合に、その操作入力に基づく処理が、測位部360を用いる特定処理であるか否かを判定する。例えば、撮像装置100の電源をオフする電源操作が受け付けられた場合には、使用要否判定部330は、その操作入力に基づく処理が特定処理でないと判定する。また、例えば、撮影モードが設定されている場合において、撮影モードから他のモード(再生モード、通信モードまたは各種設定モード)への切替操作が受け付けられた場合には、使用要否判定部330は、その操作入力に基づく処理が特定処理でないと判定する。一方、例えば、撮像装置100の電源をオンする電源操作が受け付けられた場合において、撮影モードが設定されている場合には、使用要否判定部330は、その操作入力に基づく処理が特定処理であると判定する。また、例えば、撮影モード以外の他のモードが設定されている場合において、他のモードから撮影モードへの切替操作が受け付けられた場合には、使用要否判定部330は、その操作入力に基づく処理が特定処理であると判定する。そして、使用要否判定部330は、その判定結果を動作制御部340に出力する。なお、使用要否判定部330は、撮像装置100がスタンバイ状態(待機状態)となった場合に、そのスタンバイ状態において行われる処理が特定処理であるか否かを判定するようにしてもよい。また、使用要否判定部330は、図1および図3に示すホスト制御部130に対応する。なお、使用要否判定部330は、特許請求の範囲に記載の判定部の一例である。
【0085】
動作制御部340は、使用要否判定部330から出力された判定結果と、測位部360から出力された測位部360における動作モードとに基づいて、測位部360への電源供給の制御を行うことにより測位部360の動作制御を行うものである。例えば、操作入力に基づく処理が特定処理である旨の判定結果が使用要否判定部330から出力された場合には、動作制御部340は、測位部360に電源を供給する制御を行い、測位部360を動作させる制御を行う。また、例えば、操作入力に基づく処理が特定処理でない旨の判定結果が使用要否判定部330から出力された場合には、動作制御部340は、測位部360における動作モードに基づいて、測位部360の動作制御を行う。すなわち、動作制御部340は、測位部360における動作モードがエフェメリスデータ取得モードである場合、または、衛星捕捉モードであり動作中である場合には、これらの各動作が終了するまでの間、測位部360に電源を供給する制御を行う。これにより、その動作が終了するまでの間、測位部360の動作を継続して行わせ、その動作の終了後、測位部360を停止させる制御を行う。また、動作制御部340は、測位部360における動作モードが位置更新モードである場合、または、衛星捕捉モードであるが動作中でない場合には、測位部360への電源供給を停止する制御を行い、測位部360を停止させる制御を行う。なお、動作制御部340は、図3に示すGPS制御部121および電源制御論理回路122に対応する。また、この動作制御については、図7および図8を参照して詳細に説明する。なお、動作制御部340は、特許請求の範囲に記載の制御部および取得部の一例である。また、エフェメリスデータ取得モード、または、衛星捕捉モードであり動作中である場合は、特許請求の範囲に記載の第1のモードの一例である。また、測位部360を停止させた後の測位部360のオフ状態は、特許請求の範囲に記載の第2のモードの一例である。
【0086】
電源供給部350は、動作制御部340の制御に基づいて、測位部360に電源を供給するものである。なお、電源供給部350は、図1および図3に示すバッテリ200に対応する。
【0087】
測位部360は、測位処理のために必要な測位情報を外部から受信するものであり、電源供給部350から電源供給を受けて測位処理を行う。例えば、測位部360は、撮像装置のモード設定部320により撮影モードが設定された場合には、電源供給部350から電源供給を受けて測位処理を行う。また、測位部360は、現在の動作モード(エフェメリスデータ取得モード、衛星捕捉モード、位置更新モード)を動作制御部340に出力する。なお、測位部360は、図1および図3に示すGPSモジュール120に対応する。また、測位部360は、特許請求の範囲に記載の受信部の一例である。
【0088】
[位置取得モードの指定画面の表示例]
図6は、本発明の第1の実施の形態における表示部160の表示例(位置取得モード指定画面400)を示す図である。位置取得モード指定画面400は、撮影モードの設定時における位置取得モードを指定するための画面である。また、位置取得モード指定画面400には、位置取得モードを指定するための複数のボタンと、戻るボタン405と、決定ボタン406とが設けられている。なお、位置取得モードを指定するための複数のボタンとして、「位置取得優先モード」ボタン401と、「位置取得・消費電力バランスモード」ボタン402と、「低消費電力モード」ボタン403と、「GPSオフモード」ボタン404とが設けられている。また、位置取得モード指定画面400は、例えば、撮影モードを設定する操作入力が行われた場合に、表示部160に表示される。
【0089】
「位置取得優先モード」ボタン401は、位置取得優先モードを指定する場合に押下されるボタンである。位置取得優先モードは、撮影モードが設定されている場合には、測位部360に常に電源を供給して測位動作を行うモードである。すなわち、撮影モードが設定され、位置取得優先モードが指定されている場合には、測位部360が常に動作状態となっている。このため、最新の測位情報を用いることができるが、消費電力が大きくなる。
【0090】
「位置取得・消費電力バランスモード」ボタン402は、位置取得・消費電力バランスモードを指定する場合に押下されるボタンである。位置取得・消費電力バランスモードは、撮影モードが設定されている場合には、測位部360における動作モードに応じて測位部360に適宜電源が供給され、測位動作を行うモードである。また、ユーザ操作による電源オフや、撮影モード以外のモードに切り替えるモード切替の操作入力がされた場合には、一定条件により、測位部360への電源供給を一定期間継続して行う。すなわち、位置取得・消費電力バランスモードは、図9に示す処理手順を行う動作モードである。なお、本発明の第1の実施の形態では、位置取得・消費電力バランスモードが設定されている場合を例にして説明する。
【0091】
「低消費電力モード」ボタン403は、低消費電力モードを指定する場合に押下されるボタンである。低消費電力モードは、撮影モードが設定されている場合には、測位部360における動作モードに応じて測位部360に適宜電源が供給され、測位動作を行うモードである。また、ユーザ操作による電源オフや、撮影モード以外のモードに切り替えるモード切替の操作入力がされた場合に、この操作入力に応じて測位部360への電源供給を停止される。すなわち、低消費電力モードは、図9に示す処理手順のうち、割り込み処理800を行わない動作モードである。このため、GPSのみが動作する状態がなくなることにより消費電力を低減させることができるが、エフェメリスデータ取得中であってもGPSの動作を停止させるため、位置情報の取得が遅くなることがある。
【0092】
「GPSオフモード」ボタン404は、GPSオフモードを指定する場合に押下されるボタンである。GPSオフモードは、測位動作を行わないモードである。すなわち、撮影モードが設定されている場合でも、GPSオフモードが指定されている場合には、測位部360に電源が供給されず、測位部360がオフ状態となっている。このため、消費電力を低減させることができるが、測位情報を用いることができない。
【0093】
決定ボタン406は、位置取得モードを指定する押下操作がされた後に、その指定を決定する際に押下されるボタンである。戻るボタン405は、例えば、直前に表示されていた表示画面に戻る場合に押下されるボタンである。
【0094】
[測位部の動作制御例]
図7および図8は、本発明の第1の実施の形態における動作制御部340により測位部360の動作制御を行う場合を示すシーケンスチャートである。図7および図8に示す例では、撮像装置のモード設定部320により設定される撮像装置100におけるモード421と、測位部360における動作モード422と、測位部360への電源供給の有無423との関係を概略的に示す。なお、撮像装置100におけるモード421は、撮影モード、再生モード、通信モードおよび各種設定モードの何れかである。また、図7および図8に示す縦軸は時間軸を示す。
【0095】
図7および図8には、撮像装置のモード設定部320により撮影モードが設定されている場合における動作制御例を示す。図7に示す例では、撮影モードが設定されている場合に、撮像装置100の電源をオフする電源操作が行われる場合を想定して説明する。また、図7に示す例では、撮影モードが設定されているため、測位部360には電源供給部350からの電源供給が行われているものとする。
【0096】
図7(a)には、測位部360における動作モード422として衛星捕捉モードが設定され、衛星捕捉モードにおける衛星捕捉動作が実行中である場合を示す。このように衛星捕捉動作が実行中に、矢印431に示すように、撮像装置100の電源をオフする電源操作が行われた場合には、使用要否判定部330が測位部360の要否を判定する。この場合には、撮影モードが設定されているが、撮像装置100の電源がオンされるため、撮影モードにおける撮像処理が行われない。このため、測位部360により取得された測位情報を用いることはない。そこで、使用要否判定部330は、測位部360により取得された測位情報を用いない旨の判定結果を動作制御部340に出力する。
【0097】
動作制御部340は、測位部360により取得された測位情報を用いない旨の判定結果が使用要否判定部330から出力されたため、測位部360における動作モードに基づいて、測位部360への電源供給の要否を判断する。ここで、測位部360における動作モード422として衛星捕捉モードが設定され、衛星捕捉モードにおける衛星捕捉動作が実行中であるため、動作制御部340は、その衛星捕捉動作が終了するまで、電源供給を継続して行う。そして、その衛星捕捉動作が終了した場合には、矢印432に示すように、動作制御部340は、測位部360への電源供給を停止する。
【0098】
なお、測位部360が、エフェメリスデータを取得する取得基準を満たしているか否かを判断し、その取得基準を満たしている場合には、エフェメリスデータ取得モードにおけるエフェメリスデータ取得動作を行うようにしてもよい。例えば、対象となる全てのGPS衛星の仰角が一定角度以上であり、かつ、少なくとも1つのGPS衛星からの信号強度(CNR)が一定値以上であることを、その取得基準として用いることができる。その取得基準を満たしている場合には、エフェメリスデータ取得動作が行われ、このエフェメリスデータ取得動作が終了するまで、動作制御部340は測位部360への電源供給を継続して行う。
【0099】
また、衛星捕捉動作の終了時およびエフェメリスデータ取得動作の終了時に、撮像装置100の電源をオンする電源操作が行われたか否かを判断し、電源をオンする電源操作が行われた場合には測位部360への電源供給を継続して行うようにしてもよい。この場合には、測位部360が衛星捕捉モードに移行して衛星捕捉モードにおける間欠動作を実行する。
【0100】
なお、測位部360における動作モード422として衛星捕捉モードが設定されているが衛星捕捉動作の実行中でない場合には、動作制御部340は、撮像装置100の電源をオフする電源操作が行われると、測位部360への電源供給を停止する。
【0101】
図7(b)には、測位部360における動作モード422としてエフェメリスデータ取得モードが設定されている場合を示す。このようにエフェメリスデータ取得モードが設定されている場合に、矢印433に示すように、撮像装置100の電源をオフする電源操作が行われた場合には、使用要否判定部330が測位部360の要否を判定する。この場合には、図7(a)に示す場合と同様に、測位部360により取得された測位情報を用いることはない。そこで、使用要否判定部330は、測位部360により取得された測位情報を用いない旨の判定結果を動作制御部340に出力する。
【0102】
また、動作制御部340は、図7(a)に示す場合と同様に、測位部360における動作モードに基づいて、測位部360への電源供給の要否を判断する。ここで、測位部360における動作モード422としてエフェメリスデータ取得モードが設定されているため、動作制御部340は、そのエフェメリスデータ取得動作が終了するまで、電源供給を継続して行う。そして、そのエフェメリスデータ取得動作が終了した場合には、矢印434に示すように、動作制御部340は、測位部360への電源供給を停止する。なお、エフェメリスデータ取得動作の終了時に、撮像装置100の電源をオンする電源操作が行われたか否かを判断し、電源をオンする電源操作が行われた場合には測位部360への電源供給を継続して行うようにしてもよい。この場合には、測位部360が衛星捕捉モードに移行して衛星捕捉モードにおける間欠動作を実行する。
【0103】
図7(c)には、測位部360における動作モード422として位置更新モードが設定されている場合を示す。このように位置更新モードが設定されている場合に、矢印435に示すように、撮像装置100の電源をオフする電源操作が行われた場合には、使用要否判定部330が測位部360の要否を判定する。この場合には、図7(a)に示す場合と同様に、測位部360により取得された測位情報を用いることはない。そこで、使用要否判定部330は、測位部360により取得された測位情報を用いない旨の判定結果を動作制御部340に出力する。
【0104】
また、動作制御部340は、図7(a)に示す場合と同様に、測位部360における動作モードに基づいて、測位部360への電源供給の要否を判断する。ここで、測位部360における動作モード422として位置更新モードが設定されているため、動作制御部340は、矢印436に示すように、測位部360への電源供給を停止する。
【0105】
図8に示す例では、撮影モードが設定されている場合に、撮影モードから再生モードへの切替操作が行われる場合を想定して説明する。また、図8に示す例では、撮影モードが設定されているため、測位部360には電源供給部350からの電源供給が行われているものとする。
【0106】
図8(a)には、測位部360における動作モード422として衛星捕捉モードが設定され、衛星捕捉モードにおける衛星捕捉動作が実行中である場合を示す。このように衛星捕捉動作が実行中に、矢印441に示すように、撮影モードから再生モードへの切替操作が行われた場合には、使用要否判定部330が測位部360の要否を判定する。この再生モードでは、図7(a)に示す場合と同様に、測位部360により取得された測位情報を用いることはない。そこで、使用要否判定部330は、測位部360により取得された測位情報を用いない旨の判定結果を動作制御部340に出力する。
【0107】
また、動作制御部340は、図7(a)に示す場合と同様に、測位部360における動作モードに基づいて、測位部360への電源供給の要否を判断する。ここで、測位部360における動作モード422として衛星捕捉モードが設定され、衛星捕捉モードにおける衛星捕捉動作が実行中であるため、動作制御部340は、その衛星捕捉動作が終了するまで、電源供給を継続して行う。そして、その衛星捕捉動作が終了した場合には、矢印442に示すように、動作制御部340は、測位部360への電源供給を停止する。また、図7(a)に示す場合と同様に、測位部360が、エフェメリスデータを取得する取得基準を満たしているか否かを判断し、その取得基準を満たしている場合には、エフェメリスデータ取得モードにおけるエフェメリスデータ取得動作を行うようにしてもよい。
【0108】
また、図7(a)に示す場合と同様に、衛星捕捉動作の終了時およびエフェメリスデータ取得動作の終了時に、再生モードから撮影モードへの切替操作が行われたか否かを判断する。そして、この切替操作が行われた場合には測位部360への電源供給を継続して行うようにしてもよい。この場合には、測位部360が衛星捕捉モードに移行して衛星捕捉モードにおける間欠動作を実行する。
【0109】
なお、測位部360における動作モード422として衛星捕捉モードが設定されているが衛星捕捉動作の実行中でない場合には、動作制御部340は、撮影モードから再生モードへの切替操作が行われると、測位部360への電源供給を停止する。
【0110】
図8(b)には、測位部360における動作モード422としてエフェメリスデータ取得モードが設定されている場合を示す。このようにエフェメリスデータ取得モードが設定されている場合に、矢印443に示すように、撮影モードから再生モードへの切替操作が行われた場合には、使用要否判定部330が測位部360の要否を判定する。この場合には、図7(b)に示す場合と同様に、測位部360により取得された測位情報を用いることはない。そこで、使用要否判定部330は、測位部360により取得された測位情報を用いない旨の判定結果を動作制御部340に出力する。
【0111】
また、動作制御部340は、図7(b)に示す場合と同様に、測位部360における動作モードに基づいて、測位部360への電源供給の要否を判断する。ここで、測位部360における動作モード422としてエフェメリスデータ取得モードが設定されているため、動作制御部340は、そのエフェメリスデータ取得動作が終了するまで、電源供給を継続して行う。そして、そのエフェメリスデータ取得動作が終了した場合には、矢印444に示すように、動作制御部340は、測位部360への電源供給を停止する。なお、エフェメリスデータ取得動作の終了時に、再生モードから撮影モードへの切替操作が行われたか否かを判断し、電源をオンする電源操作が行われた場合には測位部360への電源供給を継続して行うようにしてもよい。この場合には、測位部360が衛星捕捉モードに移行して衛星捕捉モードにおける間欠動作を実行する。
【0112】
図8(c)には、測位部360における動作モード422として位置更新モードが設定されている場合を示す。このように位置更新モードが設定されている場合に、矢印445に示すように、撮影モードから再生モードへの切替操作が行われた場合には、使用要否判定部330が測位部360の要否を判定する。この場合には、図7(c)に示す場合と同様に、測位部360により取得された測位情報を用いることはない。そこで、使用要否判定部330は、測位部360により取得された測位情報を用いない旨の判定結果を動作制御部340に出力する。
【0113】
また、動作制御部340は、図7(c)に示す場合と同様に、測位部360における動作モードに基づいて、測位部360への電源供給の要否を判断する。ここで、測位部360における動作モード422として位置更新モードが設定されているため、動作制御部340は、矢印446に示すように、測位部360への電源供給を停止する。
【0114】
なお、撮影モードから、通信モードまたは各種設定モードへの切替操作が行われた場合についても、図8に示す撮影モードから再生モードへの切替操作が行われた場合と同様である。このため、ここでの説明を省略する。
【0115】
[撮像装置の動作例]
図9は、本発明の第1の実施の形態における撮像装置100による測位処理の処理手順の一例を示すフローチャートである。この例では、図6に示す位置取得モード指定画面400における「位置取得・消費電力バランスモード」ボタン402の押下により、位置取得・消費電力バランスモードが設定されている場合を例にして説明する。
【0116】
例えば、ユーザ操作により撮像装置100の電源をオンする操作入力が受け付けられると、ホストシステムが起動する。そして、撮影モード以外の他のモードから撮影モードへの切替操作が受け付けられた場合、または、撮影モードにて起動した場合には(ステップS900)、GPSモジュール120における動作モードが判断される(ステップS901)。すなわち、ホスト制御部130が、GPSモジュール120における動作モードを確認するためのコマンドをGPS制御部121に送信し、GPSモジュール120における動作モードを判断する。また、GPSモジュール120から定期的に送信される測位情報の中にGPSモジュール120の状態を含めておき、これにより、GPSモジュール120における動作モードを判断するようにしてもよい。すなわち、信号線210によりホスト制御部130の受信ポートを開き、受信されたデータを読むことにより、GPSモジュール120の動作モードを判断することができる。なお、受信データがない場合には、GPSモジュール120がオフ状態であると判断することができる。ここで、本発明の第1の実施の形態では、撮像装置100のホスト制御部130側の電源がオフされている状態でも、GPSモジュール120の電源がオンされている場合が存在する。このため、撮像装置100の電源をオンする操作入力が受け付けられた直後に、GPSモジュール120における動作モードが判断される。
【0117】
GPSモジュール120における動作モードが、衛星捕捉モードである場合には(ステップS901)、衛星捕捉動作を規定時間継続して行う(ステップS923)。また、測位部360の動作モードが、エフェメリスデータ取得モード(図9では「Eph.取得モード」で示す)である場合には(ステップS901)、エフェメリスデータ取得動作を継続して行う(ステップS926)。また、GPSモジュール120が電源オフの状態である場合には(ステップS901)、電源制御論理回路122が、バッテリ200からGPSモジュール120への電源供給を開始させる(ステップS902)。
【0118】
続いて、GPSモジュール120が、衛星捕捉モードにおける間欠動作を実行する(ステップS903)。この間欠動作は、例えば、GPS衛星を特定することができる程度の時間(例えば、18秒間)、GPSモジュール120をオン状態として行われる。例えば、衛星捕捉動作の実行状態を18秒間とし、衛星捕捉動作のオフ状態を72秒間とすることができる。
【0119】
続いて、GPSモジュール120が、エフェメリスデータを保持しているか否かを判断する(ステップS904)。GPSモジュール120が、エフェメリスデータを保持している場合には(ステップS904)、保持されているエフェメリスデータが、有効なエフェメリスデータであるか否かが判断される(ステップS905)。保持されているエフェメリスデータが有効なエフェメリスデータである場合には(ステップS905)、保持されているエフェメリスデータについて、測位を行うに際して十分なエフェメリスデータが存在するか否かが判断される(ステップS906)。例えば、測位では、4つ以上の衛星を捕捉する必要があるため、保持されているエフェメリスデータにより、4つ以上の衛星を捕捉することができるか否かが判断される。
【0120】
測位を行うに際して十分なエフェメリスデータが存在する場合には(ステップS906)、新しい衛星が見えたか否かが判断される(ステップS907)。新しい衛星が見えていない場合には(ステップS907)、GPSモジュール120が、位置更新モードにおける間欠動作を実行する(ステップS908)。例えば、位置更新動作の実行状態を3秒間とし、位置更新動作のオフ状態を12秒間とすることができる。
【0121】
続いて、GPSモジュール120が、保持されているエフェメリスデータが、測位に十分かつ有効なエフェメリスデータであるか否かが判断される(ステップS909)。そして、保持されているエフェメリスデータが、測位に十分かつ有効なエフェメリスデータである間は、位置更新モードにおける間欠動作を継続して行う(ステップS908)。ここで、保持されているエフェメリスデータが、測位に十分かつ有効なエフェメリスデータである間とは、例えば、現在の状況において、保持されているエフェメリスデータが測位に十分なGPS衛星数かつ有効期間内となっている期間である。
【0122】
また、GPSモジュール120が、エフェメリスデータを保持していない場合(ステップS904)、または、保持されているエフェメリスデータが有効なエフェメリスデータでない場合には(ステップS905)、ステップS910に進む。また、保持されているエフェメリスデータについて、測位を行うに際して十分なエフェメリスデータが存在しない場合(ステップS906)、または、新しい衛星が見えた場合には(ステップS907)、ステップS910に進む。
【0123】
そして、GPSモジュール120が、エフェメリスデータを取得する取得基準を満たしているか否かを判断する(ステップS910)。その取得基準を満たしている場合には(ステップS910)、GPSモジュール120が、エフェメリスデータ取得モードにおけるエフェメリスデータ取得動作を行う(ステップS911)。このエフェメリスデータ取得動作は、例えば、十分なエフェメリスデータが取得された場合、または、終了条件を満たす場合に終了する。例えば、設定時間が経過したこと、または、継続基準を満たさないことを、その終了条件として用いることができる。そして、エフェメリスデータ取得動作(ステップS911)を終了した場合には、ステップS903に戻る。また、エフェメリスデータを取得する取得基準を満たしていない場合には(ステップS910)、ステップS903に戻る。なお、この例では、ステップS910において、エフェメリスデータを取得する取得基準を満たしている場合には、ステップS911に進む例を示した。しかしながら、ステップS907を通過した後に、ステップS910に進んだ場合には、既に測位に十分なエフェメリスデータがあることになる。このため、ステップS907を通過した後に、ステップS910に進んだ場合には、S908へ遷移するようにしてもよい。
【0124】
ここで、点線の矩形内に示す処理手順は、割り込み処理800の処理手順である。この例では、撮像装置100の電源をオフするユーザ操作、または、撮影モード以外の他のモードへの切替操作を割り込み処理を行うためのトリガとする場合を例にして説明する。
【0125】
撮像装置100の電源をオフする操作入力、または、撮影モード以外の他のモードへの切替操作が受け付けられると(ステップS920)、撮像装置100のホスト側の電源がオフされ、ホスト側の電源オフがGPSモジュール120に通知される。なお、ステップS920は、特許請求の範囲に記載の判定手順の一例である。ホスト側の電源オフが通知されると、この通知時における動作モードをGPSモジュール120が確認する(ステップS921)。この通知時における動作モードが、エフェメリスデータ取得モードである場合には(ステップS921)、エフェメリスデータ取得動作を継続して行う(ステップS926)。また、その通知時における動作モードが、位置更新モードである場合には(ステップS921)、GPSモジュール120の電源がオフされる(ステップS927)。すなわち、GPSモジュール120が、電源制御論理回路122に電源オフの通知を行い、電源制御論理回路122がGPSモジュール120への電源の供給を停止させる(ステップS927)。また、その通知時における動作モードが、衛星捕捉モードである場合には(ステップS921)、GPSモジュール120が、衛星捕捉モードにおける衛星捕捉動作を実行中であるか否かを判断する(ステップS922)。
【0126】
衛星捕捉モードにおける衛星捕捉動作を実行中である場合には(ステップS922)、GPSモジュール120が、その衛星捕捉動作を規定時間継続して行う(ステップS923)。そして、GPSモジュール120が、エフェメリスデータを取得する取得基準を満たしているか否かを判断する(ステップS924)。この取得基準は、ステップS910における取得基準と同一とすることができる。
【0127】
その取得基準を満たしている場合には(ステップS924)、GPSモジュール120が、エフェメリスデータ取得モードにおけるエフェメリスデータ取得動作を行う(ステップS926)。このエフェメリスデータ取得動作は、例えば、十分なエフェメリスデータが取得された場合、または、終了条件を満たす場合に終了する。この終了条件は、ステップS911における終了条件と同一とすることができる。そして、エフェメリスデータ取得動作(ステップS926)を終了した場合には、ステップS925に進む。また、エフェメリスデータを取得する取得基準を満たしていない場合には(ステップS924)、ステップS925に進む。
【0128】
続いて、GPSモジュール120が、撮像装置100のホスト側の状態を確認する(ステップS925)。そして、ホスト側の電源状態がオンである場合、かつ、撮影モードが設定されている場合には(ステップS925)、ステップS903に戻る。一方、ホスト側の電源状態がオフである場合、または、撮影モード以外の他のモードが設定されている場合には(ステップS925)、GPSモジュール120の電源がオフされる(ステップS927)。これにより、ホスト側およびGPS側の電源がオフ状態となる。なお、ステップS921乃至S926は、特許請求の範囲に記載の制御手順の一例である。
【0129】
ここで、ステップS927において、エフェメリスデータの取得が未完了な場合も想定される。このため、ステップS927において、GPSモジュール120の電源をオフする前に、衛星補足モードにおける間欠動作を所定回数または所定時間だけ実行し、この衛星補足間欠動作の実行後に、GPSモジュール120の電源をオフするようにしてもよい。この例を、図10に示す。
【0130】
図10は、本発明の第1の実施の形態における撮像装置100による測位処理の処理手順の一例を示すフローチャートである。この処理手順は、図9に示すステップS927の変形例であり、GPSモジュール120の電源をオフする前に、衛星補足モードにおける間欠動作を所定回数だけ実行する例である。なお、図10に示す処理手順のうち、図9と同様の処理手順については、同一の符号を付して、これらの説明を省略する。
【0131】
図9に示すステップS925において、撮像装置100のホスト側の電源状態がオフである場合、または、撮影モード以外の他のモードが設定されている場合には(ステップS925)、衛星補足モードにおける間欠動作を所定回数だけ実行する。すなわち、図9に示すステップS903乃至S907、S910、S911を所定回数だけ実行する。そして、ステップS903乃至S907、S910、S911を所定回数だけ実行した場合には(ステップS940)、ステップS925に進む。なお、この例では、衛星補足モードにおける間欠動作を所定回数だけ実行する例を示したが、ステップS940において、衛星補足モードにおける間欠動作を所定時間だけ実行したか否かを判断するようにしてもよい。
【0132】
これにより、撮像装置100のホスト側の電源状態がオフである場合、または、撮影モード以外の他のモードが設定されている場合でも、エフェメリスデータの取得が可能となり、次回以降の測位を速めることができる。なお、図10に示す処理手順を行うか否か、または、図10に示す処理手順を行う場合における衛星補足モードの間欠動作の実行回数または実行時間を設定可能とするようにしてもよい。これにより、消費電力を考慮したユーザ設定を可能とすることができる。
【0133】
なお、本発明の第1の実施の形態では、撮像装置100の電源をオフするユーザ操作、または、撮影モード以外の他のモードへの切替操作を割り込み処理を行うためのトリガとする例を示した。ただし、例えば、撮像装置100がスタンバイ状態(待機状態)となった場合を割り込み処理を行うためのトリガとするようにしてもよい。すなわち、撮影モードが設定されている場合において、撮像装置100における状態が変化して、スタンバイ状態となった場合を割り込み処理を行うためのトリガとすることができる。
【0134】
また、撮像装置100の電源をオフするユーザ操作がされて、割り込み処理が実行されている場合には、撮像装置100のホスト側の電源がオフ状態となっている可能性がある。この場合に、GPSモジュール120が動作中であることをユーザに通知する通知部を撮像装置100に外装するようにしてもよい。この通知部は、例えば、GPSモジュール120からの制御に基づいて、ユーザに対する通知処理を行う。この通知部として、例えば、撮像装置100の側面にLED(Light Emitting Diode)を設け、GPSモジュール120からの制御に基づいて、そのLEDを発光させることができる。これにより、電源のオフ操作が行われた後において、GPSモジュール120が動作中であることをユーザに通知することができる。
【0135】
このように、例えば、撮像装置100において電源のオン/オフ操作が繰り返し行われるような場合において、撮像装置100のメイン電源がオフされた後でも、必要に応じて、GPSモジュール120の動作を継続して行わせることができる。このため、次の起動時には、GPSモジュール120がホットスタートを行うことができる可能性が高いため、測位処理を迅速に行うことができる。
【0136】
また、GPS衛星が見つかりにくい環境下では、撮像装置100のメイン電源がオフされた後でも、そのオフ時に衛星捕捉モードの間欠動作が実行中であれば、その動作が終了するまでの間、衛星探索を継続して行う。そして、その動作中にGPS衛星が見つかった場合には、エフェメリスデータの取得動作を継続して行うことができる。このため、次の起動時には、GPSモジュール120がホットスタートを行うことができ、測位処理を迅速に行うことができる。
【0137】
また、GPSモジュール120により取得される測位情報を用いる必要がないモード(再生モード、通信モード等)が設定されている場合において、GPSモジュール120をオフ状態とすることができる。これにより消費電力を低減させることができる。
【0138】
また、GPS衛星が見つからない状態においても、衛星捕捉モードにおいて衛星捕捉の間欠動作を行う。このため、消費電力を抑えつつ、エフェメリスデータを取得することができる環境下に移動した場合には、位置情報の取得へ迅速に遷移することができる。
【0139】
また、位置更新モードにおいて間欠動作を行うため、消費電力を抑えつつ、適切な位置の更新が可能となる。また、位置更新モードにおける間欠動作中にGPS衛星が見えない状況に移動した場合でも同じ動作を継続する。これにより、再び測位可能な位置に移動した場合には、迅速に位置の更新を行うことができる
【0140】
また、エフェメリスデータ取得モード以外のモード(衛星捕捉モード、位置更新モード)が設定されている場合には、間欠動作となるため、消費電力を抑えることができる
【0141】
また、間欠動作時の動作Dutyを適宜変更することにより、GPSモジュール120へ割く電力を下げることができるため、バッテリ容量や消費電力が厳しいシステムにおいても、比較的組み込みやすくなる。
【0142】
また、GPSモジュール120の電源をオフする場合に、撮像装置100のホスト側の状態確認を行うため、GPSモジュール120の動作を途切れさせずに、実装可能となる。
【0143】
このように、本発明の第1の実施の形態によれば、撮像装置100における消費電力を削減するとともに、GPSモジュール120により適切な測位を行うことができる。
【0144】
<2.第2の実施の形態>
本発明の第1の実施の形態では、間欠動作の間欠中にはGPS制御部の電源をオフする例を示した。しかしながら、間欠動作の間欠中には、GPS制御部の電源をオフせずに、GPS制御部をスタンバイ状態とするようにしてもよい。そこで、本発明の第2の実施の形態では、間欠動作の間欠中には、GPS制御部をスタンバイ状態とする場合を例にして説明する。
【0145】
[GPSモジュールの構成例]
図11は、本発明の第2の実施の形態におけるGPSモジュール600の内部構成例を示す図である。図11に示す例は、図3に示すGPSモジュール120またはホスト制御部130の変形例であり、一部を変形したものである。このため、以下では、図3に示すGPSモジュール120またはホスト制御部130と異なる点を中心にして説明し、共通する部分については同一の符号を付してこれらの説明の一部を省略する。
【0146】
図12は、本発明の第2の実施の形態における電源制御論理回路620の制御内容を模式的に示す図である。図12に示す電源制御論理回路620の制御内容については、図11を参照して詳細に説明する。
【0147】
GPSモジュール600は、図3に示すGPSモジュール120において、間欠制御論理回路630を追加して、電源制御論理回路122の代わりに、電源制御論理回路620を設けたものである。また、GPSモジュール600は、GPS制御部610と、電源制御論理回路620と、間欠制御論理回路630と、電源スイッチ123と、通信分離回路124とを備える。
【0148】
GPS制御部610は、GPSモジュール600を制御する制御回路であり、RTC611および位置演算プロセッサ128を内蔵する。GPS制御部610は、GPS電源オン制御ポートから信号線641を介して電源制御論理回路620に制御信号を出力する。信号線641を介して出力される制御信号は、ホスト制御部130がGPSモジュール120の起動を要求しているか否かを示す制御信号であり、信号線644を介してRTC611から出力される制御信号と同様のタイミングとすることができる。ただし、ホスト側とは異なり、トリガではなく、GPS側のオフが確定するまで、「H」レベルの制御信号が継続して出力される。
【0149】
電源制御論理回路620は、GPS制御部610の電源のオン/オフを司る回路であり、例えば、ディスクリート半導体およびリニアICにより構成される。具体的には、電源制御論理回路620は、ホスト制御部130から出力される制御信号と、GPS制御部610から出力される制御信号と、バッテリ200の電圧監視とに基づいて、GPS制御部610の電源のオン/オフを制御する。具体的には、図12(a)を参照して説明する。例えば、電源供給線202の供給電圧がGPS制御部610の動作保証電圧範囲内である場合を想定する。この場合には、電源制御論理回路620は、ホスト制御部130またはGPS制御部610の少なくとも1つから「H」レベルの制御信号が出力されたときに、「H」レベルの制御信号を電源スイッチ123に出力する。これにより、GPS制御部610の電源がオンされる。一方、例えば、電源供給線202の供給電圧がGPS制御部610の動作保証電圧範囲外である場合には、電源制御論理回路620は、ホスト制御部130およびGPS制御部610の制御信号にかかわらず、「L」レベルの制御信号を電源スイッチ123に出力する。これにより、GPS制御部610の電源が強制的にオフされる。
【0150】
間欠制御論理回路630は、GPS制御部610をオン状態またはスタンバイ状態とする回路である。具体的には、間欠制御論理回路630は、RTC611から出力される間欠動作時間制御信号と、RTC611から出力される制御信号とに基づいて、GPS制御部610をオン状態またはスタンバイ状態とする制御を行う。例えば、間欠制御論理回路630は、信号線642を介して出力される制御信号を「L」レベルから「H」レベルとすることにより、GPS制御部610を割り込み処理によりオン状態とする。また、例えば、間欠制御論理回路630は、信号線642を介して出力される制御信号を「H」レベルから「L」レベルとすることにより、GPS制御部610を割り込み処理によりスタンバイ状態とする。
【0151】
また、RTC611から出力される制御信号は、ホスト制御部130がGPSモジュール600の起動を要求しているか否かを示す制御信号であり、信号線644を介して入力される。この制御信号は、例えば、図3に示す信号線207を介して出力される制御信号と同様に、「H」レベルおよび「L」レベルの制御信号とすることができる。また、この制御信号は、信号線210を介して入力されるホスト制御部130からの通知に基づいて生成される。また、図3と同様に、例えば、32k_out端子のアウトプットの有り無しを用いることができる。また、この制御信号により、タイマカウントビットがフルとなった場合における意図しない一時的な「H」レベルの制御信号を遮断することができる。
【0152】
また、RTC611から出力される間欠動作時間制御信号は、GPSモジュール600における動作内容を示す制御信号であり、信号線643を介して入力される。この間欠動作時間制御信号は、例えば、図3に示す間欠動作時間制御信号と同様に、「H」レベルおよび「L」レベルの制御信号とすることができる。また、これらの各制御信号(信号線643および644)と、間欠制御論理回路630から信号線642を介して出力される制御信号との関係の一例を、図12(b)に示す。
【0153】
このように、GPSモジュール600の間欠動作の間欠中には、GPS制御部610をスタンバイ状態とすることができる。なお、図11において、ホスト制御部130およびGPS制御部610からの制御信号の入力を省略して、電源制御論理回路620への入力をバッテリ200の電圧監視のみとし、GPS制御部610に常に電源を供給するようにしてもよい。この場合でも、間欠制御論理回路630によりGPS制御部610をオン状態またはスタンバイ状態とすることができるため、消費電力を低減させることができる。なお、間欠制御論理回路630は、特許請求の範囲に記載の切替部(制御信号線によるオン/スタンバイを切り替える切替部)の一例である。また、GPS制御部610のスタンバイ状態は、特許請求の範囲に記載の第2のモードの一例である。
【0154】
<3.第3の実施の形態>
本発明の第1の実施の形態では、GPS衛星から取得された航法メッセージからエフェメリスデータを抽出して、この抽出されたエフェメリスデータを用いて測位を行う例を示した。ここで、GPSを用いて行われる測位では、予測エフェメリスデータを用いて測位を行うことも可能である。ここでいう予測エフェメリスデータとは、GPS衛星から送信される航法メッセージ中のエフェメリスデータ(過去に取得したものも含む)に基づいて、将来的に予測される衛星軌道を算出したデータを意味する。そこで、本発明の第3の実施の形態では、航法メッセージから抽出されたエフェメリスデータとともに、予測エフェメリスデータを用いて測位を行う場合を例にして説明する。なお、予測エフェメリスデータは、上述の通り、航法メッセージから抽出されたエフェメリスデータに基づいて生成されるデータであり、例えば、過去のエフェメリスデータに基づいて予測エフェメリスデータが生成される。例えば、予測エフェメリスデータの取得方法として、ネットワーク(有線または無線)経由または記録媒体経由により、既に生成されている予測エフェメリスデータを外部から撮像装置100にダウンロードして取得する取得方法を用いることができる。また、撮像装置100がGPS衛星から受信したエフェメリスデータに基づいて、ホスト制御部130またはGPS制御部121が予測エフェメリスデータを算出して取得するようにしてもよい。また、本発明の第3の実施の形態における構成については、本発明の第1の実施の形態と略同様であるため、以下では、異なる点を中心にして説明し、共通する部分については同一の符号を付してこれらの説明の一部を省略する。
【0155】
[位置取得モードの指定画面の表示例]
図13は、本発明の第3の実施の形態における表示部160の表示例(位置取得モード指定画面410)を示す図である。位置取得モード指定画面410は、図6に示す位置取得モード指定画面400の変形例であり、撮影モードの設定時における位置取得モードを指定するための画面である。このため、位置取得モード指定画面400と共通する部分には、同一の符号を付して、これらの説明を省略する。
【0156】
位置取得モード指定画面410には、「アシストデータ優先モード」ボタン407および「予測Eph.優先モード」ボタン408が設けられている。
【0157】
「アシストデータ優先モード」ボタン407は、アシストデータ優先モードを指定する場合に押下されるボタンである。アシストデータ優先モードは、予測エフェメリスデータ等の、時刻に対応したGPS衛星の軌跡に関するデータ(アシストデータ)を優先使用して位置更新モードにおける間欠動作を行うモードである。ここでいうアシストデータとは、少なくとも時刻に対応してGPS衛星の軌跡を予測したデータであればよく、例えば、上述した予測エフェメリスデータである。また、アシストデータとして、例えば、GPS衛星から取得されたエフェメリスデータに基づかずに、時刻に対応してGPS衛星の軌跡を予測したデータを用いるようにしてもよい。アシストデータ優先モードの特徴は、測位に十分な予測エフェメリスデータが存在する場合には、GPS衛星から放送されている航法メッセージの取得を行わないことである。また、測位の精度や測位時間は、実際のエフェメリスデータを用いる場合よりも劣るが、位置情報を取得することは可能である。さらに、エフェメリスデータの取得中(例えば、図14に示すステップS911の処理手順(Eph.取得モード連続動作))の消費電力を削減することができる。
【0158】
「衛星Eph.優先モード」ボタン408は、衛星Eph.優先モードを指定する場合に押下されるボタンである。衛星Eph.優先モードは、予測エフェメリスデータが存在する場合においても、GPS衛星から放送されるエフェメリスデータの取得を行うモードである。この衛星Eph.優先モードが設定されている場合における処理手順は、図9に示す処理手順と同一となる。ただし、予測エフェメリスデータが存在するため、衛星補足モードにおいて、衛星補足が難しい環境下での衛星補足時間を短縮することができる。これにより、エフェメリスデータ取得モードへの遷移回数を増やすことができる。また、予測エフェメリスデータにより、コールドスタートまたはウォームスタート時においても、最も早く位置情報を取得することができる。このため、使用時の最初の測位までユーザを待たせることが減少し、ユーザに与えるストレスを軽減させることができる。
【0159】
[撮像装置の動作例]
図14は、本発明の第3の実施の形態における撮像装置100による測位処理の処理手順の一例を示すフローチャートである。この例では、図13に示す位置取得モード指定画面410における「アシストデータ優先モード」ボタン407の押下により、アシストデータ優先モードが設定されている場合を例にして説明する。また、図14に示す処理手順は、図9に示す処理手順の変形例であり、ステップS930を追加した点のみが異なる。そこで、以下では、図9に示す処理手順と異なる点を中心にして説明し、共通する部分については同一の符号を付してこれらの説明の一部を省略する。
【0160】
GPSモジュール120が、衛星捕捉モードにおける間欠動作を実行した後に(ステップS903)、GPSモジュール120に予測エフェメリスデータが保持されているか否かを判断する(ステップS930)。GPSモジュール120に測位に十分な予測エフェメリスデータが保持されている場合には(ステップS930)、GPSモジュール120が、その予測エフェメリスデータを用いて位置更新モードにおける間欠動作を実行する(ステップS908)。この場合についても、例えば、位置更新動作の実行状態を3秒間とし、位置更新動作のオフ状態を12秒間とすることができる。
【0161】
また、GPSモジュール120に測位に十分な予測エフェメリスデータが保持されていない場合には(ステップS930)、ステップS904に進む。
【0162】
<4.変形例>
本発明の第1乃至第3の実施の形態では、位置演算プロセッサをGPS制御部に内蔵する例を示した。しかしながら、位置演算プロセッサについては、GPS制御部の外部に設けるようにしてもよい。そこで、以下では、位置演算プロセッサをGPS制御部の外部に設ける例を示す。また、以下では、本発明の第1乃至第3の実施の形態の他の変形例を示す。なお、以下で示すGPSモジュールまたは制御部は、図3に示すGPSモジュール120またはホスト制御部130の変形例であり、一部を変形したものである。このため、以下では、図3に示すGPSモジュール120またはホスト制御部130と異なる点を中心にして説明し、共通する部分については同一の符号を付してこれらの説明の一部を省略する。
【0163】
[GPSモジュールの構成例]
図15は、本発明の第1の実施の形態の変形例におけるGPSモジュール500の内部構成例を示す図である。GPSモジュール500は、図3に示すGPS制御部121に内蔵されている位置演算プロセッサ128を、GPSモジュール120内においてGPS制御部121の外部に設けたものである。また、GPSモジュール500は、図3に示すGPSモジュール120に内蔵されている通信分離回路124を、GPSモジュール120の外部に設けたものである。GPS制御部510は、例えば、GPS衛星からの信号補足、航法メッセージの受信、デコード、デコードされた航法メッセージの送信を行うことができるが、位置演算を行うことができないHost BasedタイプのGPS ICである。このため、GPS制御部510は、位置演算を行うプロセッサ(例えば、位置演算プロセッサ502)を外部に設ける必要がある。この外部に設けられた位置演算プロセッサ502により、航法データに基づいて位置の算出を行うことができる。なお、信号線512は、図3に示す信号線207に対応し、信号線513は、図3に示す信号線204に対応し、信号線514は、図3に示す信号線215に対応し、信号線515は、図3に示す信号線216に対応する。また、位置演算プロセッサ502には、発振子511が設けられている。
【0164】
例えば、信号線509および508、通信分離回路501を介して、ホスト制御部130から位置演算プロセッサ502にコマンドが送信される。また、信号線507を介して、位置演算プロセッサ502からGPS制御部510にコマンドが送信される。
【0165】
また、信号線506を介して、GPS制御部510がGPS衛星から受信してデコードした航法メッセージを、GPS制御部510から位置演算プロセッサ502に送信する。また、信号線505および504、通信分離回路501を介して、位置演算プロセッサ502により算出された位置情報が、位置演算プロセッサ502からホスト制御部130に送信される。また、信号線503は、図3に示す信号線210に対応する。なお、位置演算プロセッサ502は、位置演算以外の処理を行うようにしてもよい。例えば、位置演算プロセッサ502が常時電源にてオン/スタンバイの2ステートにて動作する場合には、位置演算プロセッサ502が電源制御論理回路の代わりを行うことも可能である。
【0166】
なお、図15に示す例では、位置演算プロセッサをGPSモジュール500内に設けた例を示したが、例えば、位置演算プロセッサをGPSモジュール500の外部に設けるようにしてもよい。例えば、ホスト制御部130に位置演算を行うプロセッサを設けるようにしてもよく、位置演算を行うプロセッサをホスト制御部130およびGPSモジュール500の外部に設けるようにしてもよい。
【0167】
[GPSモジュールの構成例]
図16は、本発明の第1の実施の形態の変形例におけるGPSモジュール540の内部構成例を示す図である。GPSモジュール540は、図3に示すGPSモジュール120における信号線210の代わりに、信号線541を設けたものである。すなわち、ホスト制御部130のホスト側準備通知ポートから出力された制御信号を、GPS制御部121のホスト状態監視ポートに入力させずに、通信分離回路124にのみ入力させる。
【0168】
例えば、所定間隔(例えば、1秒間隔)で、通信分離回路124を介してホスト制御部130からGPS制御部121に、ホスト側の状態を示す状態通知を含む通信を行う。これにより、GPS制御部121がホスト側の状態を把握することができるため、GPS制御部121のホスト状態監視ポートを省略することができる。
【0169】
[GPSモジュールの構成例]
図17は、本発明の第1の実施の形態の変形例におけるGPSモジュール550の内部構成例を示す図である。GPSモジュール550は、図3に示すGPS制御部121に内蔵されているRTC125の代わりに、GPS制御部557の外部にRTC551を設けたものである。なお、信号線553は信号線204に対応し、電源供給線554は電源供給線205に対応し、信号線555は信号線207に対応する。また、RTC551には発振子552が設けられ、GPS制御部557およびRTC551間において各種通信を行うための通信線556が設けられる。
【0170】
このように、RTCについては、GPS制御部557の外部に設けるようにしてもよい。また、RTCの代わりに、時間を管理することができる他の計時回路を用いるようにしてもよい。
【0171】
[GPSモジュールの構成例]
図18は、本発明の第1の実施の形態の変形例におけるGPSモジュール560の内部構成例を示す図である。GPSモジュール560は、図3に示す電源スイッチ123の代わりに、電源IC561を設けたものである。電源IC561は、EN(イネーブル)機能を備える電源回路であり、電源制御論理回路122からの制御に基づいてバッテリ200からGPSモジュール120への電源供給のオン/オフを切り替える。電源IC561は、DC/DCコンバータやLDO(Low Drop Out Regulator)等により構成される。電源IC561としてDC/DCコンバータを用いる場合、バッテリ200とGPS制御部121の動作保証電圧範囲に応じて、降圧タイプ・昇圧タイプ・昇/降圧タイプのうち適切なDC/DCコンバータを用いることが好ましい。これにより、バッテリ200電圧の監視を不要とすることができる。また、電源IC561としてLDOを用いる場合において、GPS制御部121の動作保証電圧範囲に応じて選択されたLDO出力電圧よりもバッテリ200電圧範囲が低い場合には、バッテリ200電圧の監視は必要となる。なお、電源IC561は、特許請求の範囲に記載の切替部の一例である。
【0172】
このように、電源スイッチ以外の電源回路を用いてバッテリ200からGPSモジュール120への電源供給のオン/オフを切り替えるようにしてもよい。また、電源IC561の代わりに、複数の回路により構成される電源ブロックを用いるようにしてもよい。この電源ブロックとして、外部フロントコントローラにより各電源ポート制御を行えるものを用いることができ、この場合には、例えば、ホスト制御部と同一の構成とすることができる。
【0173】
[GPSモジュールの構成例]
図19は、本発明の第1の実施の形態の変形例におけるGPSモジュール570の内部構成例を示す図である。GPSモジュール570は、図3に示すバッテリ200と電源スイッチ123との間に、DC/DCコンバータ571を設けたものである。
【0174】
また、DC/DCコンバータ571として、バッテリ200とGPS制御部121の動作保証電圧範囲に応じて、降圧タイプ・昇圧タイプ・昇/降圧タイプのうち適切なDC/DCコンバータを用いることが好ましい。このようなDC/DCコンバータを、バッテリ200と電源スイッチ123との間に設けることにより、電圧の監視を不要とすることができる。
【0175】
[GPSモジュールの構成例]
図20は、本発明の第1の実施の形態の変形例におけるGPSモジュール580の内部構成例を示す図である。GPSモジュール580は、図3に示す電源スイッチ123の代わりに、DC/DCコンバータ581を設けたものである。DC/DCコンバータ581として、バッテリ200とGPS制御部121の動作保証電圧範囲に応じて、降圧タイプ・昇圧タイプ・昇/降圧タイプのうち適切なDC/DCコンバータを用いることが好ましい。また、DC/DCコンバータ581は、EN機能を備える電源回路であり、電源制御論理回路122からの制御に基づいて、バッテリ200からGPSモジュール120への電源供給のオン/オフを切り替える。なお、DC/DCコンバータ581は、特許請求の範囲に記載の切替部の一例である。
【0176】
このように、電源スイッチ以外の電源回路を用いてバッテリ200からGPSモジュール120への電源供給のオン/オフを切り替えるようにしてもよい。なお、DC/DCコンバータ581の代わりに、LDOを設けるようにしてもよいが、この場合には、バッテリ200電圧範囲と、GPS制御部121の動作保証電圧範囲の関係から、電源監視が必要な場合もある。
【0177】
なお、本発明の実施の形態では、測位部として、GPSシステムを用いる場合を例にして説明したが、無線通信手段を用いる他の測位システムに、本発明の実施の形態を適用するようにしてもよい。例えば、周囲に存在するWLAN(Wireless Local Area Network)によるアクセスポイント情報を用いて位置情報を導き出す測位システムに、本発明の実施の形態を適用するようにしてもよい。
【0178】
また、本発明の実施の形態では、エフェメリスデータをGPSモジュールのGPSアンテナにより取得する例を示したが、これに限らず、他の受信方法により受信して取得するようにしてもよい。例えば、サーバに保存されているエフェメリスデータを所定のネットワークを介して通信部(無線通信部または有線通信部)により受信して取得するようにしてもよい。この場合には、例えば、その通信部はGPSモジュールの中に配置することができる。なお、その通信部は、特許請求の範囲に記載の受信部の一例である。また、その通信部を用いてエフェメリスデータを取得する場合には、その取得中の動作を特定動作とすることができる。
【0179】
また、測位部を備える電子機器(例えば、撮像機能付き携帯電話機、ナビゲーションシステム、携帯型メディアプレイヤー)や、測位部を制御する電子機器に本発明の実施の形態を適用することができる。例えば、測位部を備える撮像機能付き携帯電話機に本発明の実施の形態を適用する場合には、測位情報を用いる特定処理を撮影モードとし、特定処理以外の処理を通話モード、コンテンツ再生モード等とすることができる。
【0180】
なお、本発明の実施の形態は本発明を具現化するための一例を示したものであり、本発明の実施の形態において明示したように、本発明の実施の形態における事項と、特許請求の範囲における発明特定事項とはそれぞれ対応関係を有する。同様に、特許請求の範囲における発明特定事項と、これと同一名称を付した本発明の実施の形態における事項とはそれぞれ対応関係を有する。ただし、本発明は実施の形態に限定されるものではなく、本発明の要旨を逸脱しない範囲において実施の形態に種々の変形を施すことにより具現化することができる。
【0181】
また、本発明の実施の形態において説明した処理手順は、これら一連の手順を有する方法として捉えてもよく、また、これら一連の手順をコンピュータに実行させるためのプログラム乃至そのプログラムを記憶する記録媒体として捉えてもよい。この記録媒体として、例えば、CD(Compact Disc)、MD(MiniDisc)、DVD(Digital Versatile Disk)、メモリカード、ブルーレイディスク(Blu-ray Disc(登録商標))等を用いることができる。
【符号の説明】
【0182】
100 撮像装置
111 撮像部
112 記録再生部
113 記録媒体
120、500、520、540、550、560、570、580、600 GPSモジュール
121、510、521、557、610 GPS制御部
122、620 電源制御論理回路
123 電源スイッチ
124、501、522 通信分離回路
125、551、611 RTC
126、127、511、552 発振子
127 発振器
128、502、532 位置演算プロセッサ
130、530 ホスト制御部
141 ROM
142 RAM
150 操作受付部
151 操作受付I/F部
152 シャッターボタン
160 表示部
161 表示制御部
170 メモリカード
171 メモリI/F部
180 通信I/F部
190 バス
200 バッテリ
310 操作受付部
320 撮像装置のモード設定部
330 使用要否判定部
340 動作制御部
350 電源供給部
360 測位部
531 コアプロセッサ
561 電源IC
571、581 DC/DCコンバータ
630 間欠制御論理回路
【特許請求の範囲】
【請求項1】
測位処理のために必要な測位情報を外部から受信する受信部と、
ユーザによる操作入力が受け付けられた場合に当該操作入力に基づく処理が前記測位情報を用いる特定処理であるか否かを判定する判定部と、
前記判定部による判定結果および前記受信部の動作内容に基づいて前記受信部の動作制御を行う制御部と
を具備する電子機器。
【請求項2】
前記制御部は、前記操作入力に基づく処理が前記特定処理であると前記判定部により判定された場合には前記受信部を動作させるように制御を行い、前記操作入力に基づく処理が前記特定処理でないと前記判定部により判定された場合において、前記受信部が特定動作を行う第1のモードである場合には当該特定動作が終了するまで前記受信部を前記第1のモードにて動作させるように制御を行い当該特定動作の終了後に前記受信部の動作を前記第1のモードよりも消費電力が小さい第2のモードに遷移させるように制御を行い、前記受信部が前記第1のモードでない場合には前記受信部を前記第2のモードに遷移させるように制御を行う請求項1記載の電子機器。
【請求項3】
前記制御部は、前記操作入力に基づく処理が前記特定処理であると前記判定部により判定された場合には前記受信部を動作させるように制御を行い、前記操作入力に基づく処理が前記特定処理でないと前記判定部により判定された場合には前記受信部の動作内容に基づいて前記受信部の動作停止制御を行う請求項1記載の電子機器。
【請求項4】
前記制御部は、前記操作入力に基づく処理が前記特定処理でないと前記判定部により判定された場合において、前記受信部が特定動作を行っている場合には当該特定動作が終了するまで前記受信部を動作させるように制御を行い当該特定動作の終了後に前記受信部の動作を停止させるように制御を行い、前記受信部が前記特定動作を行っていない場合には前記受信部の動作を停止させるように制御を行う請求項3記載の電子機器。
【請求項5】
前記受信部は、GPSにより前記測位情報を取得するGPSシステムにより構成され、
前記特定動作は、エフェメリスデータを取得することを目的とする動作またはGPS衛星を捕捉することを目的とする動作の何れかである
請求項4記載の電子機器。
【請求項6】
前記受信部は、エフェメリスデータを取得することを目的とする動作を行うエフェメリスデータ取得モードと、GPS衛星を捕捉することを目的とする動作を一定間隔毎に間欠的に行う衛星捕捉モードと、前記測位情報に基づいて算出される位置情報の更新を行うことを目的とする動作を一定間隔毎に間欠的に行う位置更新モードとの何れかの動作モードが設定され、
前記制御部は、前記操作入力に基づく処理が前記特定処理でないと前記判定部により判定された場合において、前記位置更新モードが設定されている場合には前記受信部の動作を停止させるように制御を行い、前記エフェメリスデータ取得モードまたは前記衛星捕捉モードが設定されている場合には当該設定されているモードに係る前記特定動作が終了するまで前記受信部を動作させるように制御を行い当該特定動作の終了後に前記受信部の動作を停止させるように制御を行う
請求項5記載の電子機器。
【請求項7】
前記制御部は、前記操作入力に基づく処理が前記特定処理でないと前記判定部により判定され、前記衛星捕捉モードが設定されている場合において、GPS衛星を捕捉することを目的とする動作が実行されている場合には当該衛星捕捉動作が終了するまで前記受信部を動作させるように制御を行い当該衛星捕捉動作の終了後に前記受信部の動作を停止させるように制御を行い、GPS衛星を捕捉することを目的とする動作が実行されていない場合には前記受信部の動作を停止させるように制御を行う請求項6記載の電子機器。
【請求項8】
前記制御部は、前記操作入力に基づく処理が前記特定処理でないと前記判定部により判定され、前記衛星捕捉モードが設定されている場合において、GPS衛星を捕捉することを目的とする動作の終了時にエフェメリスデータの取得基準を満たしている場合には前記エフェメリスデータ取得モードに遷移してエフェメリスデータを取得することを目的とする動作が終了するまで前記受信部を動作させるように制御を行い当該取得動作の終了後に前記受信部の動作を停止させるように制御を行う請求項7記載の電子機器。
【請求項9】
被写体を撮像して画像データを生成する撮像部をさらに具備し、
前記特定処理は、前記撮像部により生成された画像データに前記受信部により取得された前記測位情報に基づいて算出される位置情報を関連付けて記録する処理である
請求項3記載の電子機器。
【請求項10】
前記特定処理を行うための撮影モードから前記特定処理以外の処理を行うための他のモードへの切替操作、または、前記他のモードから前記撮影モードへの切替操作を前記操作入力として受け付ける操作受付部をさらに具備し、
前記判定部は、前記撮影モードから前記他のモードへの切替操作が前記操作入力として受け付けられた場合には当該操作入力に基づく処理が前記特定処理でないと判定し、前記他のモードから前記撮影モードへの切替操作が前記操作入力として受け付けられた場合には当該操作入力に基づく処理が前記特定処理であると判定する
請求項9記載の電子機器。
【請求項11】
前記電子機器の電源をオフする電源オフ操作を前記操作入力として受け付ける操作受付部をさらに具備し、
前記判定部は、前記電源オフ操作が前記操作入力として受け付けられた場合には当該操作入力に基づく処理が前記特定処理でないと判定する
請求項3記載の電子機器。
【請求項12】
電源供給線を介して前記受信部に主電源を供給する電源供給部と、
前記電源供給線におけるオン/オフを切り替える切替部および制御信号線によるオン/スタンバイを切り替える切替部のうちの少なくとも1つの切替部とをさらに具備し、
前記制御部は、前記切替部を制御することにより前記受信部の動作制御を行う
請求項1記載の電子機器。
【請求項13】
測位処理のために必要な測位情報を外部から受信する受信部と、
電子機器における状態が変化した場合に当該変化後の状態において行われる処理が前記測位情報を用いる特定処理であるか否かを判定する判定部と、
前記判定部による判定結果および前記受信部の動作内容に基づいて前記受信部の動作制御を行う制御部と
を具備する電子機器。
【請求項14】
前記判定部は、前記変化後の状態が待機状態となった場合には当該変化後の状態において行われる処理が前記特定処理でないと判定し、
前記制御部は、前記変化後の状態において行われる処理が前記特定処理であると前記判定部により判定された場合には前記受信部を動作させるように制御を行い、前記変化後の状態において行われる処理が前記特定処理でないと前記判定部により判定された場合には前記受信部の動作内容に基づいて前記受信部の動作停止制御を行う
請求項13記載の電子機器。
【請求項15】
測位処理のために必要な測位情報を外部から受信する受信部と、
ユーザによる操作入力が受け付けられた場合に当該操作入力に基づく処理が前記測位情報を用いる特定処理であるか否かを示す所定情報を取得する取得部と、
前記取得された所定情報および当該所定情報の取得時における動作内容に基づいて動作を行うか否かの制御を行う制御部と
を具備する測位デバイス。
【請求項16】
ユーザによる操作入力が受け付けられた場合に当該操作入力に基づく処理が、受信部により外部から受信される測位情報を用いる特定処理であるか否かを判定する判定手順と、
前記判定手順での判定結果および前記受信部の動作内容に基づいて前記受信部の動作制御を行う制御手順と
を具備する情報処理方法。
【請求項17】
ユーザによる操作入力が受け付けられた場合に当該操作入力に基づく処理が、受信部により外部から受信される測位情報を用いる特定処理であるか否かを判定する判定手順と、
前記判定手順での判定結果および前記受信部の動作内容に基づいて前記受信部の動作制御を行う制御手順と
をコンピュータに実行させるプログラム。
【請求項1】
測位処理のために必要な測位情報を外部から受信する受信部と、
ユーザによる操作入力が受け付けられた場合に当該操作入力に基づく処理が前記測位情報を用いる特定処理であるか否かを判定する判定部と、
前記判定部による判定結果および前記受信部の動作内容に基づいて前記受信部の動作制御を行う制御部と
を具備する電子機器。
【請求項2】
前記制御部は、前記操作入力に基づく処理が前記特定処理であると前記判定部により判定された場合には前記受信部を動作させるように制御を行い、前記操作入力に基づく処理が前記特定処理でないと前記判定部により判定された場合において、前記受信部が特定動作を行う第1のモードである場合には当該特定動作が終了するまで前記受信部を前記第1のモードにて動作させるように制御を行い当該特定動作の終了後に前記受信部の動作を前記第1のモードよりも消費電力が小さい第2のモードに遷移させるように制御を行い、前記受信部が前記第1のモードでない場合には前記受信部を前記第2のモードに遷移させるように制御を行う請求項1記載の電子機器。
【請求項3】
前記制御部は、前記操作入力に基づく処理が前記特定処理であると前記判定部により判定された場合には前記受信部を動作させるように制御を行い、前記操作入力に基づく処理が前記特定処理でないと前記判定部により判定された場合には前記受信部の動作内容に基づいて前記受信部の動作停止制御を行う請求項1記載の電子機器。
【請求項4】
前記制御部は、前記操作入力に基づく処理が前記特定処理でないと前記判定部により判定された場合において、前記受信部が特定動作を行っている場合には当該特定動作が終了するまで前記受信部を動作させるように制御を行い当該特定動作の終了後に前記受信部の動作を停止させるように制御を行い、前記受信部が前記特定動作を行っていない場合には前記受信部の動作を停止させるように制御を行う請求項3記載の電子機器。
【請求項5】
前記受信部は、GPSにより前記測位情報を取得するGPSシステムにより構成され、
前記特定動作は、エフェメリスデータを取得することを目的とする動作またはGPS衛星を捕捉することを目的とする動作の何れかである
請求項4記載の電子機器。
【請求項6】
前記受信部は、エフェメリスデータを取得することを目的とする動作を行うエフェメリスデータ取得モードと、GPS衛星を捕捉することを目的とする動作を一定間隔毎に間欠的に行う衛星捕捉モードと、前記測位情報に基づいて算出される位置情報の更新を行うことを目的とする動作を一定間隔毎に間欠的に行う位置更新モードとの何れかの動作モードが設定され、
前記制御部は、前記操作入力に基づく処理が前記特定処理でないと前記判定部により判定された場合において、前記位置更新モードが設定されている場合には前記受信部の動作を停止させるように制御を行い、前記エフェメリスデータ取得モードまたは前記衛星捕捉モードが設定されている場合には当該設定されているモードに係る前記特定動作が終了するまで前記受信部を動作させるように制御を行い当該特定動作の終了後に前記受信部の動作を停止させるように制御を行う
請求項5記載の電子機器。
【請求項7】
前記制御部は、前記操作入力に基づく処理が前記特定処理でないと前記判定部により判定され、前記衛星捕捉モードが設定されている場合において、GPS衛星を捕捉することを目的とする動作が実行されている場合には当該衛星捕捉動作が終了するまで前記受信部を動作させるように制御を行い当該衛星捕捉動作の終了後に前記受信部の動作を停止させるように制御を行い、GPS衛星を捕捉することを目的とする動作が実行されていない場合には前記受信部の動作を停止させるように制御を行う請求項6記載の電子機器。
【請求項8】
前記制御部は、前記操作入力に基づく処理が前記特定処理でないと前記判定部により判定され、前記衛星捕捉モードが設定されている場合において、GPS衛星を捕捉することを目的とする動作の終了時にエフェメリスデータの取得基準を満たしている場合には前記エフェメリスデータ取得モードに遷移してエフェメリスデータを取得することを目的とする動作が終了するまで前記受信部を動作させるように制御を行い当該取得動作の終了後に前記受信部の動作を停止させるように制御を行う請求項7記載の電子機器。
【請求項9】
被写体を撮像して画像データを生成する撮像部をさらに具備し、
前記特定処理は、前記撮像部により生成された画像データに前記受信部により取得された前記測位情報に基づいて算出される位置情報を関連付けて記録する処理である
請求項3記載の電子機器。
【請求項10】
前記特定処理を行うための撮影モードから前記特定処理以外の処理を行うための他のモードへの切替操作、または、前記他のモードから前記撮影モードへの切替操作を前記操作入力として受け付ける操作受付部をさらに具備し、
前記判定部は、前記撮影モードから前記他のモードへの切替操作が前記操作入力として受け付けられた場合には当該操作入力に基づく処理が前記特定処理でないと判定し、前記他のモードから前記撮影モードへの切替操作が前記操作入力として受け付けられた場合には当該操作入力に基づく処理が前記特定処理であると判定する
請求項9記載の電子機器。
【請求項11】
前記電子機器の電源をオフする電源オフ操作を前記操作入力として受け付ける操作受付部をさらに具備し、
前記判定部は、前記電源オフ操作が前記操作入力として受け付けられた場合には当該操作入力に基づく処理が前記特定処理でないと判定する
請求項3記載の電子機器。
【請求項12】
電源供給線を介して前記受信部に主電源を供給する電源供給部と、
前記電源供給線におけるオン/オフを切り替える切替部および制御信号線によるオン/スタンバイを切り替える切替部のうちの少なくとも1つの切替部とをさらに具備し、
前記制御部は、前記切替部を制御することにより前記受信部の動作制御を行う
請求項1記載の電子機器。
【請求項13】
測位処理のために必要な測位情報を外部から受信する受信部と、
電子機器における状態が変化した場合に当該変化後の状態において行われる処理が前記測位情報を用いる特定処理であるか否かを判定する判定部と、
前記判定部による判定結果および前記受信部の動作内容に基づいて前記受信部の動作制御を行う制御部と
を具備する電子機器。
【請求項14】
前記判定部は、前記変化後の状態が待機状態となった場合には当該変化後の状態において行われる処理が前記特定処理でないと判定し、
前記制御部は、前記変化後の状態において行われる処理が前記特定処理であると前記判定部により判定された場合には前記受信部を動作させるように制御を行い、前記変化後の状態において行われる処理が前記特定処理でないと前記判定部により判定された場合には前記受信部の動作内容に基づいて前記受信部の動作停止制御を行う
請求項13記載の電子機器。
【請求項15】
測位処理のために必要な測位情報を外部から受信する受信部と、
ユーザによる操作入力が受け付けられた場合に当該操作入力に基づく処理が前記測位情報を用いる特定処理であるか否かを示す所定情報を取得する取得部と、
前記取得された所定情報および当該所定情報の取得時における動作内容に基づいて動作を行うか否かの制御を行う制御部と
を具備する測位デバイス。
【請求項16】
ユーザによる操作入力が受け付けられた場合に当該操作入力に基づく処理が、受信部により外部から受信される測位情報を用いる特定処理であるか否かを判定する判定手順と、
前記判定手順での判定結果および前記受信部の動作内容に基づいて前記受信部の動作制御を行う制御手順と
を具備する情報処理方法。
【請求項17】
ユーザによる操作入力が受け付けられた場合に当該操作入力に基づく処理が、受信部により外部から受信される測位情報を用いる特定処理であるか否かを判定する判定手順と、
前記判定手順での判定結果および前記受信部の動作内容に基づいて前記受信部の動作制御を行う制御手順と
をコンピュータに実行させるプログラム。
【図1】


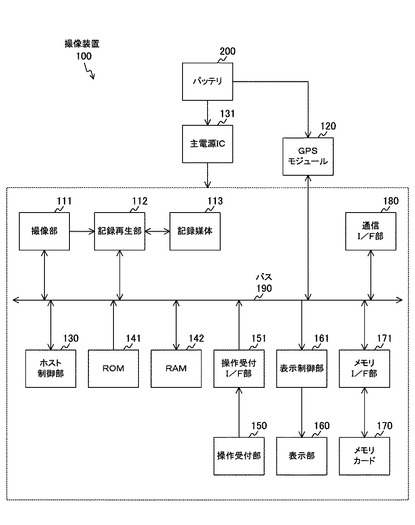
【図2】
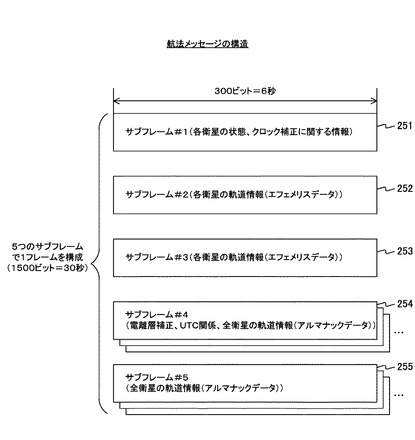
【図3】
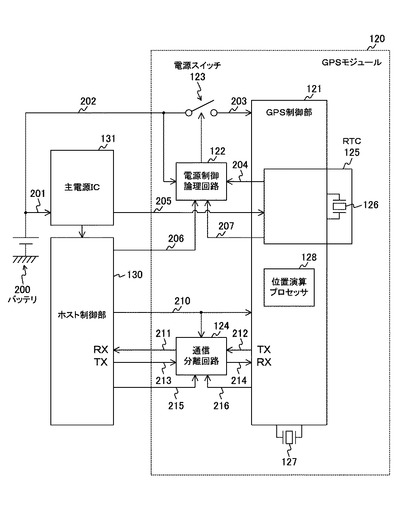
【図4】
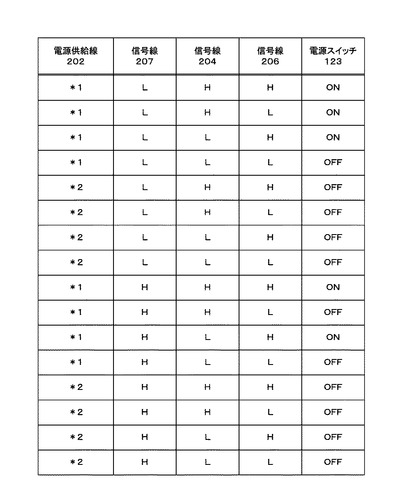
【図5】
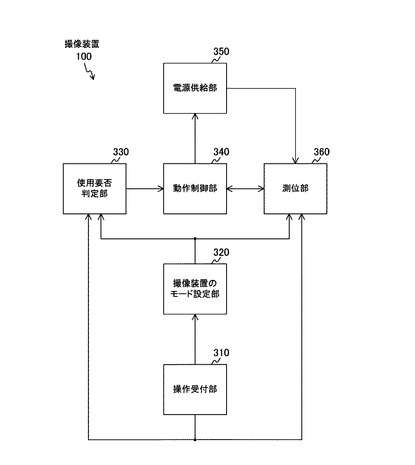
【図6】
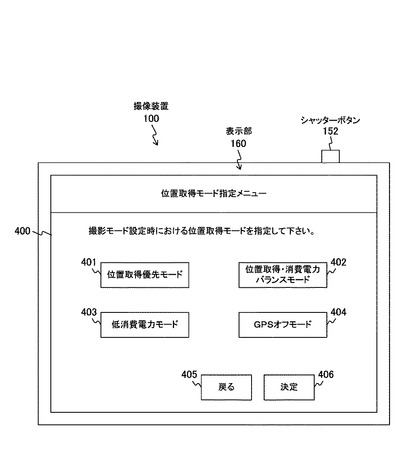
【図7】
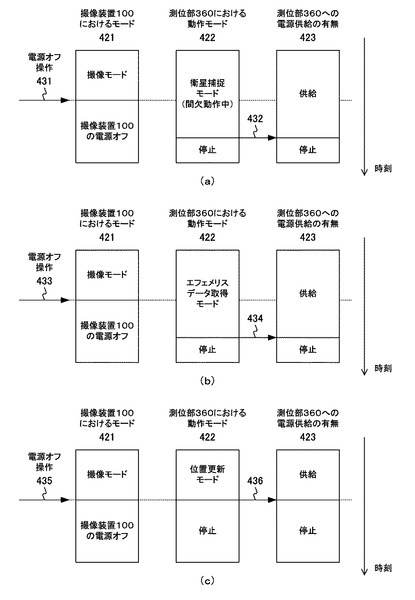
【図8】
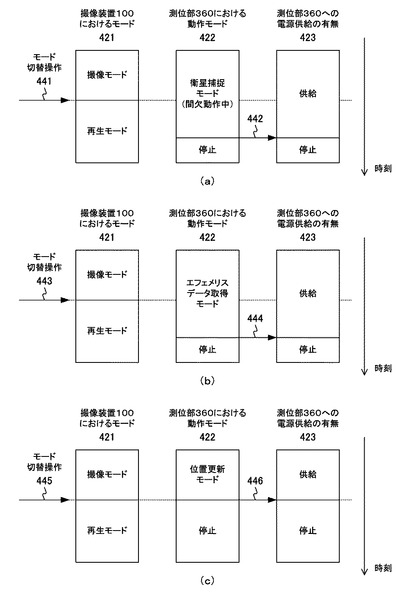
【図9】
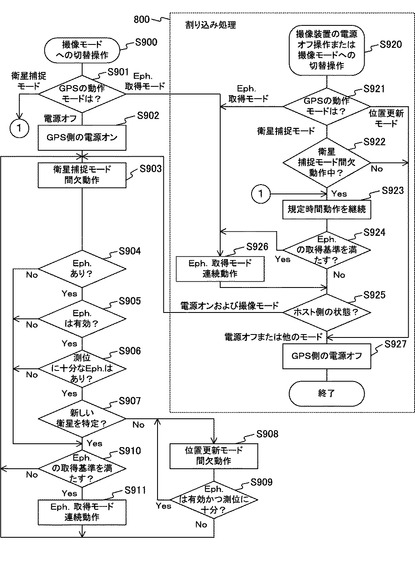
【図10】
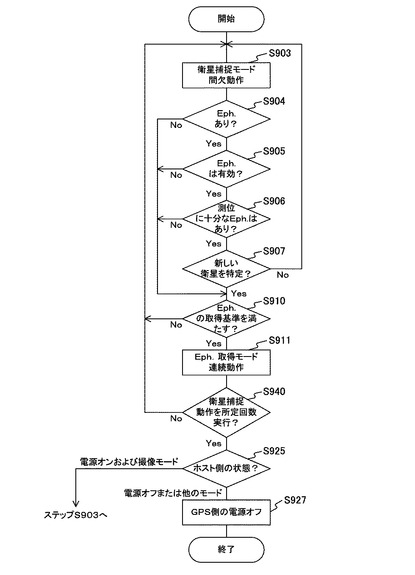
【図11】
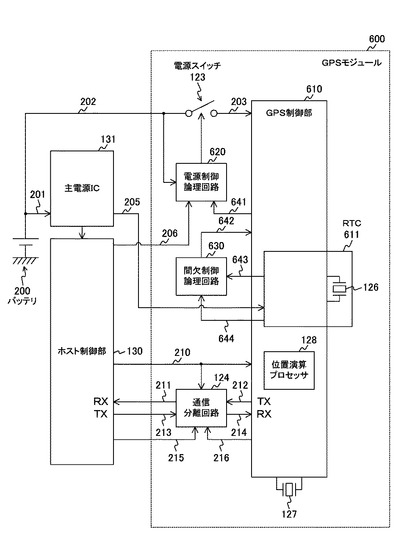
【図12】
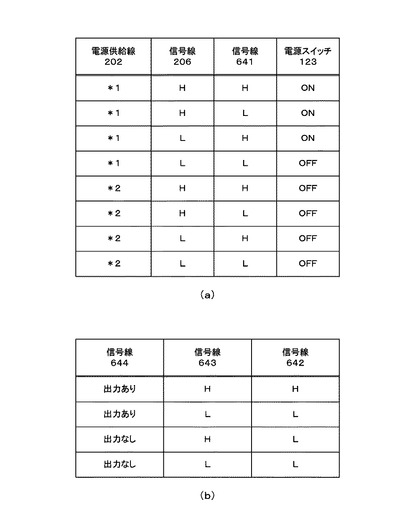
【図13】
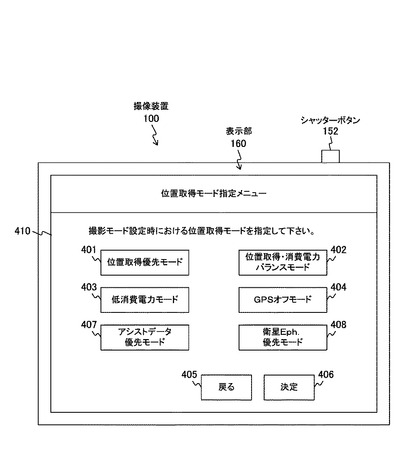
【図14】
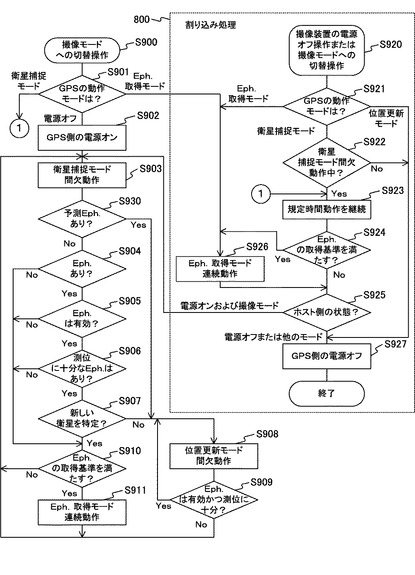
【図15】
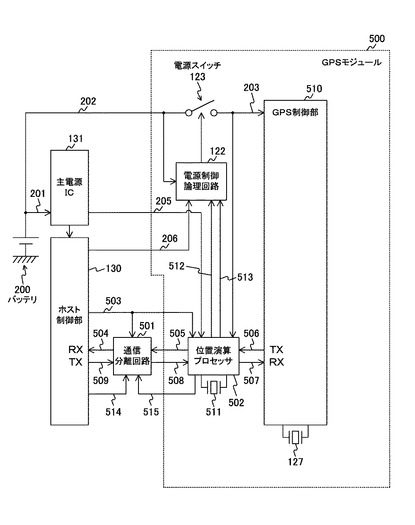
【図16】
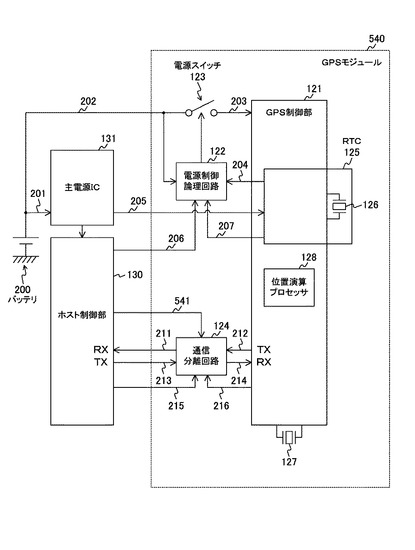
【図17】
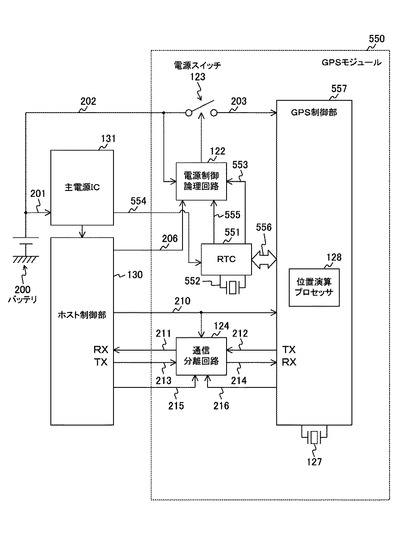
【図18】
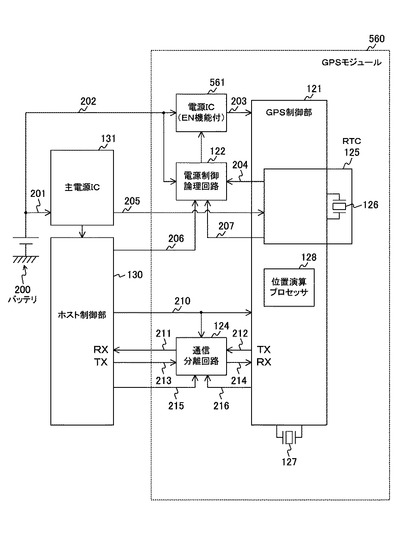
【図19】
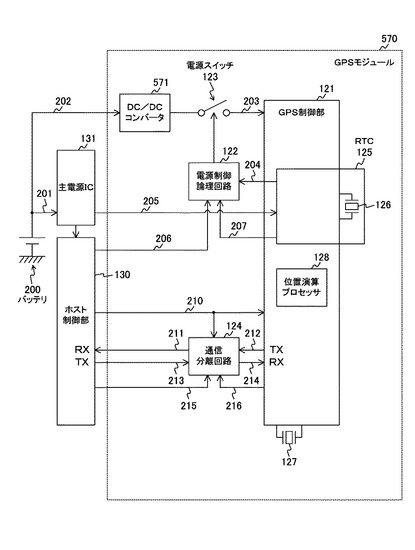
【図20】
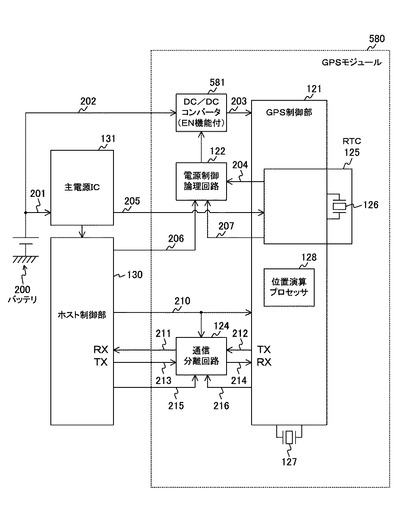
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【公開番号】特開2011−141144(P2011−141144A)
【公開日】平成23年7月21日(2011.7.21)
【国際特許分類】
【出願番号】特願2010−842(P2010−842)
【出願日】平成22年1月6日(2010.1.6)
【出願人】(000002185)ソニー株式会社 (34,172)
【Fターム(参考)】
【公開日】平成23年7月21日(2011.7.21)
【国際特許分類】
【出願日】平成22年1月6日(2010.1.6)
【出願人】(000002185)ソニー株式会社 (34,172)
【Fターム(参考)】
[ Back to top ]