
電子機器及びプログラム

【課題】位置情報や移動速度を取得できない状況であっても、的確に目的物の設置位置に関する情報の報知を行なう。
【解決手段】トンネルや高架下でレーダー探知機がGPS衛星からの電波を受信できなくなった場合には、三軸加速度センサの出力(検出値)を取得する(S31)。次いで、三軸加速度センサの出力(検出値)の振幅を一定時間平均化する(S32)。現在が停止状態(0km)で、S32で平均化した値が、0.017G以上であれば(S34:YES)、現在は移動状態であると判定する(S34)。また、現在が移動状態で、S32で平均化した値が、0.009G以下が3秒以上継続した場合は(S33:NO,S35:YES)、現在は停止状態であると判定する(S36)。
【解決手段】トンネルや高架下でレーダー探知機がGPS衛星からの電波を受信できなくなった場合には、三軸加速度センサの出力(検出値)を取得する(S31)。次いで、三軸加速度センサの出力(検出値)の振幅を一定時間平均化する(S32)。現在が停止状態(0km)で、S32で平均化した値が、0.017G以上であれば(S34:YES)、現在は移動状態であると判定する(S34)。また、現在が移動状態で、S32で平均化した値が、0.009G以下が3秒以上継続した場合は(S33:NO,S35:YES)、現在は停止状態であると判定する(S36)。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、目的物の位置に関する報知を行なう電子機器及びプログラムに関するものである。
【背景技術】
【0002】
従来、車両に搭載され、その車両の運転者等に各種の警報を報知する車載用電子機器が知られている。たとえば、自動車の速度を測定する速度測定装置のような目的物に接近した場合に、運転者に対してその警告を報知するレーダー探知機等の車載用電子機器が知られている。
【0003】
この車載用電子機器の一例として、予め速度測定装置の設置位置情報を記憶させておき、GPS(Global Positioning System )等によって取得した現在位置が、記憶した設置位置に近づいた場合(所定の接近関係になった場合)に、マイクロ波の検知の有無に関係なく警告を発するようにしたレーダー探知機がある(例えば、特許文献1参照)。この特許文献1に記載のレーダー探知機では、現在位置が、速度測定装置の設置位置から1000m以内に入った位置になった場合に第一の警報を行い、さらに速度測定装置の設置位置から500m以内に入った位置になった場合に、第二の警報を行う等している。また、警報の一例としては、本体のLED等のランプを点滅させたり、音声やメロディー、電子音等の所定の警告音をスピーカ等から出力させたり、液晶パネル等の所定の警告画面を表示するなどしている。
【0004】
このレーダー探知機では、目的物の位置情報を記憶させておき、GPS等によって取得した現在位置が、記憶した目的物の位置と所定の接近関係になった場合に、警報を行う。従って、現在位置が正しく取得できる必要がある。
【0005】
ところが、例えばトンネルや高架下に入った場合など、GPSで衛星電波が取得できないような場所では、現在位置が取得できない状況になる場合がある。また、GPSからは自車の移動速度も取得できるが(現在位置の変化または衛星電波のドップラーシフト量等から算出できる)、例えばトンネルや高架下に入った場合など、GPSで衛星電波が取得できないような場所では移動速度も取得できない。
【0006】
そこで、特許文献1に記載のレーダー探知機では、データベースに、トンネル内速度測定装置eと装置eの位置へ至るトンネル内の道路上位置に設けた誘導点b,c,dの位置情報を記憶する。誘導点bはトンネル進入前のGPS受信器によって測位可能な位置から1km以内の位置に設定し、各誘導点間の距離も1km以内に設定している。トンネル進入点aで測位不能になる直前の現在位置から誘導点bに向けて測位不能になる直前の速度で進行しているものとして現在位置を更新していき、各誘導点位置に到達したら次の誘導点に向けて同様に現在位置を更新する。次の誘導点がない場合にはトンネル内速度測定装置へ向けて同様に現在位置を更新する。トンネル内速度測定装置eとの現在位置の関係が2km、1km、500mになった際にそれぞれ接近警報を発するようにしている。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開2011−39038号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
しかしながら、上記の電子機器では、トンネル進入点aで測位不能になる直前の現在位置から誘導点bに向けて測位不能になる直前の速度で進行しているものとして現在位置を更新しているので、現実の現在位置との間に誤差が生じるという問題点がある。
【0009】
そこで、本発明は、位置情報や移動速度を取得できない状況であっても、電子機器が移動しているのか、停止しているのかを正確に判定でき、的確に目的物の設置位置に関する情報の報知を行なうことのできる電子機器及びプログラムを提供することを目的とする。
【課題を解決するための手段】
【0010】
上述した目的を達成するために、本発明に係る電子機器は、受信手段が受信した電波に基づいて、現在位置を取得するための位置取得手段と、目的物の位置情報を記憶する記憶手段と、前記位置取得手段によって取得した現在位置と前記記憶手段によって記憶された目的物の位置情報との接近関係に基づいて当該目的物の設置位置に関する情報の報知を報知手段から報知させる制御を行う制御手段とを備える電子機器において、現在の移動速度を取得するための速度取得手段と、当該電子機器の振動状態を検出する振動検出手段と、当該振動検出手段の検出結果から当該電子機器が移動しているか否かを判定する移動判定手段とを備え、前記記憶手段は、前記目的物の位置情報として現在位置が取得できない箇所にある目的物の位置情報を記憶し、前記移動判定手段が当該電子機器が移動していないと判定した場合は、前記制御手段は、現在位置が取得できない箇所にある前記記憶手段に記憶された目的物の位置へ進行しておらず、現在位置に停止しているものとして前記記憶手段に記憶された現在位置が取得できない箇所にある目的物の位置へ接近関係を判定することを特徴とする。
【0011】
このようにすることで、位置情報や移動速度を取得できない状況であっても、従来よりも的確に、電子機器(当該電子機器が設置された車両)が移動しているのか停止しているのかを判定でき、目的物の設置位置に関する情報の報知を行なうことができる。
【0012】
また、本発明に係る電子機器では、前記振動検出手段としては、三軸加速度センサを用い、前記移動判定手段は、前記三軸加速度センサの各軸毎の検出値を当該電子機器が移動しているか否かを判定する所定の閾値と比較して判定し、前記三軸加速度センサの各軸毎の検出値を判定する前記所定の閾値の内の少なくとも一つを他の二つと異ならせるようにしてもよい。
【0013】
このようにすることで、当該電子機器が移動しているか否かをより的確に判定することができる、例えば、電子機器(当該電子機器が設置された車両)が移動している場合の三軸の各方向における振動の差に対応して、閾値を定めると、電子機器の移動判定をより正確に行うことができる。
【0014】
また、本発明に係る電子機器では、前記振動検出手段としては、三軸加速度センサを用い、前記移動判定手段は、前記三軸加速度センサの各軸毎の検出値を当該電子機器が移動しているか否かを判定する一つの閾値と比較して判定し、前記三軸加速度センサの各軸毎の検出値のいずれか1つでも前記閾値を越えていたら、当該電子機器が移動していると判定するようにしてもよい。
【0015】
このようにすることで、電子機器(当該電子機器が設置された車両)が移動しているか否かを1つの閾値で、簡単に判定できる。
【0016】
また、本発明に係る電子機器では、前記制御手段は、前記位置取得手段によって現在位置が取得できない状態であり、かつ、前記速度取得手段によって現在の速度が取得できない状態である場合に、前記移動判定手段が前記電子機器が移動していると判定した場合は、現在の推定速度を決定し、前記記憶手段に記憶された現在位置が取得できない箇所にある目的物の位置へ前記推定速度で進行しているものとして当該目的物との前記接近関係を判定するようにしてもよい。
【0017】
このようにすることで、位置情報や移動速度を取得できない状況であっても、移動判定手段が前記電子機器が移動していると判定した場合は、現在の推定速度を決定し、その推定速度で進行しているものとして目的物との接近関係を判定することができる。
【0018】
また、本発明に係る電子機器では、前記記憶手段は、前記目的物の位置情報として現在位置が取得できない箇所と目的物の位置との間の標準速度を少なくとも1つ記憶しておき、前記現在の推定速度の決定は、前記記憶手段に記憶された標準速度に基づいて行うようにしてもよい。
【0019】
このようにすることで、位置情報や移動速度を取得できない状況であっても、移動判定手段が前記電子機器が移動していると判定した場合は、記憶手段に記憶された標準速度に基づいて簡便に現在の推定速度の決定を行うことができる。
【0020】
また、本発明に係る電子機器では、前記現在の推定速度の決定は、前記速度取得手段によって取得できていた過去の速度状態に基づいて行うようにしてもよい。
【0021】
このようにすることで、位置情報や移動速度を取得できない状況であっても、移動判定手段が前記電子機器が移動していると判定した場合は、位置情報や移動速度を取得できなくなる直前の速度状態に基づいて簡便に現在の推定速度の決定を行うことができる。
【0022】
また、本発明に係る電子機器では、前記移動判定手段により前記電子機器が移動していないと判定されている状態で、前記振動検出手段からの検出値が所定の閾値以上となった場合に、前記移動判定手段は、前記電子機器が移動していると判定するようにしてもよい。
【0023】
このようにすることで、簡単に電子機器が移動しているか否かを判定できるため、短時間で判定処理ができ、車両の状態に対する追従性を高めることができる。例えば、位置情報や移動速度を取得できない状況で、前記移動判定手段により前記電子機器が移動していないと判定されている状態では、一度でも、前記振動検出手段からの検出値が所定の閾値以上となった場合に、前記移動判定手段は、前記電子機器が移動していると判定するとよい。このようにすれば、停止状態から移動状態への判定をさらに迅速に行うことができる。
【0024】
また、本発明に係る電子機器では、前記移動判定手段により前記電子機器が移動していると判定されている状態で、前記振動検出手段からの検出値が所定の閾値以下の状態を所定秒間継続した場合に、前記移動判定手段は、前記電子機器が移動していないと判定するようにしてもよい。尚、この所定秒間は、例えば、3秒等の整数に限られるものでなく、3.2秒、3.25秒等の判定に適した任意の時間を設定すればよい。
【0025】
このようにすることで、位置情報や移動速度を取得できない状況であっても、前記移動判定手段により前記電子機器が移動していると判定されている状態では、前記振動検出手段からの検出値が所定の閾値以下の状態を所定秒間継続しないと停止状態と判定しないので、移動状態から停止状態への判定を正確に行うことができる。
【0026】
また、本発明に係る電子機器では、前記移動判定手段により前記電子機器が移動していないと判定されている状態で、前記振動検出手段からの検出値が所定の閾値以上に一回でもなった場合に、前記移動判定手段は、前記電子機器が移動していると判定し、前記移動判定手段により前記電子機器が移動していると判定されている状態で、前記振動検出手段からの検出値が所定の閾値以下の状態を所定秒間継続した場合に、前記移動判定手段は、前記電子機器が移動していないと判定するようにしてもよい。
【0027】
このようにすることで、停止状態から移動状態への判定を迅速に行うことができ、また、移動状態から停止状態への判定を正確に行うことができる。
【0028】
また、本発明に係る電子機器では、前記振動検出手段からの検出値は、一定時間間隔毎に検出した値の所定時間内の平均値であるようにしてもよい。
【0029】
このようにすることで、振動検出手段は、検出値のノイズを平準化することができ、正確な検出を行うことができる。
【0030】
また、本発明に係る電子機器では、前記移動判定手段により前記電子機器が移動していないと判定されている状態から、前記移動判定手段により前記電子機器が移動していると判定された場合には、現在の推定速度は、第一の所定時間かけて停止速度から前記標準速度に上げるようにしてもよい。
【0031】
このようにすることで、停止状態から移動状態へ自然な加速を行うことができる。
【0032】
また、本発明に係る電子機器では、前記移動判定手段により前記電子機器が移動していると判定されている状態から、前記移動判定手段により前記電子機器が移動していないと判定された場合には、現在の推定速度は、前記第一の所定時間より短い第二の所定時間かけて前記標準速度から停止速度に下げるようにしてもよい。
【0033】
自動車等の車両では、停止状態から所定速度までの加速時間より、所定速度から停止状態までの減速時間の方が短い時間であるので、このようにすることで、移動状態から停止状態へ自然な減速を行うことができる。
【0034】
また、本発明に係る電子機器では、前記第二の所定時間は、前記移動判定手段により前記電子機器が移動していると判定されている状態で、前記振動検出手段からの検出値が所定の閾値以下の状態を所定秒間継続した場合に、前記移動判定手段は、前記電子機器が移動していないと判定するために使用する当該所定秒間より長い時間であるようにしてもよい。
【0035】
このように第二の所定時間を所定秒間より長い時間とすることで、所定秒間より長い時間の間、現在の推定速度はゼロにならない。従って、第二の所定時間の間に、振動検出手段からの検出値が所定の閾値以上となった場合には、推定速度はゼロにならないまま、増加していくこととなる。そのため、「所定の閾値以下の状態を所定秒間」を例えば1秒間のように比較的短時間として停止していないにもかかわらず停止したと判定された場合であっても、推定速度はゼロにならずに復帰できる可能性を高めることができる。
【0036】
また、本発明に係る電子機器では、前記第二の所定時間は1秒から5秒の間であり、前記所定秒間は1秒から5秒の間であるようにしてもよい。
【0037】
このようにすることで、例えば推定速度に基づく表示(例えば数値で速度を表示したり、地図上の位置を移動させたり)をする場合、車両を停止させてから、この表示を見たときに、自己の車両停止操作に追従して速度が減少しているように感じさせることができる。
【0038】
また、本発明に係る電子機器では、前記位置取得手段及び前記速度取得手段は、GPSモジュールを用いてもよい。
【0039】
また、本発明に係る電子機器では、前記記憶手段は、現在位置が取得できない箇所にある目的物としてトンネル内の速度測定装置の位置情報を記憶し、前記報知手段からの報知はトンネル内速度測定装置への接近警告としてもよい。
【0040】
また、本発明に係る電子機器では、前記制御手段は、前記目的物の位置へ前記推定速度で進行している旨を示す報知をさせる制御を行うようにしてもよい。
【0041】
このようにすれば、当該電子機器が、目的物との接近関係の判定を、現在位置が取得できない箇所にある目的物の位置へ推定速度で進行しているものとして行なっている状態にあるということを知ることが出来る。したがって、このような報知がなされているときに、推定速度からずれた速度で走行している場合には、接近警告とのずれが生じうることを容易に認識することができ、運転者は予め注意して走行することができる。
【0042】
また、本発明の第二の態様のプログラムは、上記に記載の電子機器における制御手段としての機能をコンピュータに実現させるためのプログラムであることを特徴とする。
【図面の簡単な説明】
【0043】
【図1】本発明の好適な一実施形態であるレーダー探知機の正面斜め上から見た斜視図である。
【図2】レーダー探知機の左側面図である。
【図3】レーダー探知機のブロック図である。
【図4】待ち受け画面の表示例を示す図である。
【図5】レーダースコープの表示例を示す図である。
【図6】GPS警報の表示例を示す図である。
【図7】レーダー波警報機能における警報画面の表示例を示す図である。
【図8】トンネル内速度測定装置警報画面(2km)の表示例を示す図である。
【図9】トンネル内速度測定装置警報画面(1km)の表示例を示す図である。
【図10】トンネル内速度測定装置警報画面(500m)の表示例を示す図である。
【図11】トンネル内速度測定装置への接近警告を行なう場合の誘導点等の設定状況を示す図である。
【図12】現在位置推定処理の流れを示すフローチャートである。
【図13】三軸加速度センサによる判定処理のフローチャートである。
【発明を実施するための形態】
【0044】
以下、本発明の電子機器の一実施形態であるレーダー探知機1について図面を参照して説明する。図1及び図2に示すレーダー探知機1は、周知のように、速度違反取締用のマイクロ波レーダーの電波を受信して警告を発したり、ループコイル式速度違反取締機等の電波を出さない速度違反取締機の位置をGPS衛星からの電波を受信して警告を発する。また、レーダー探知機1は、通常自動車のダッシュボード上に取り付けられる。
【0045】
レーダー探知機1は、図1に示すように、ケース本体11の上面にソーラーパネル2並びにスイッチ部3を配置し、ケース本体11の前面側(車両前方へ配置される側(フロントガラス側))内部に速度測定装置の発する周波数帯のマイクロ波を検知するマイクロ波受信器4を配置し、ケース本体11の後面側(車両後方へ配置される側(ユーザ側))に表示部5と警報ランプ6と赤外線通信機7とリモコン受信器16を配置している。また、ケース本体11の上面側内部には、GPS受信器8を配置する。さらに、ケース本体11の左側面には、アダプタージャック9(図2参照)を配置し、他方の側面には電源スイッチ10並びに図示外のDCジャックを配置する。また、ケース本体11内には、スピーカ20(図3参照)も内蔵している。本実施形態では、表示部5は2.4インチの小型液晶ディスプレイであり、表示部5を実装するケース本体11の後方側の高さHは、その他の部位の高さH0よりも大きくしている。
【0046】
次に、図3を参照して、レーダー探知機1の電気的構成を説明する。レーダー探知機1には、主制御を行う制御部18が設けられ、制御部18は、CPU31、EEPROM32、RAM33等から構成されている。また、制御部18には、GPS衛星からの電波を受信するGPS受信機(GPSモジュール)8、速度計測用のレーダーからのマイクロ波を受信するマイクロ波受信器(マイクロ波受信モジュール)4、交通取り締まりの連絡用のUHF帯の無線電波を受信する警察無線受信機(無線受信モジュール)15、振動を検出して、レーダー探知機1が取り付けられた自動車の停止・移動を検出する三軸加速度センサ21、レーダー探知機1を操作するためのリモコン17からの赤外線を受信するリモコン受信機16、各種の情報や警告画面を表示するカラー液晶から構成された表示部5、点滅又は点灯して報知を行うランプ6、警告の音声を発するスピーカ20、速度違反取締機が設置されている最新の位置情報を記憶したメモリカード14が挿入されるメモリカードリーダ13、携帯電話と赤外線通信を行う赤外線通信機7、及びメモリカード14から読み込んだ速度違反取締機が設置されている最新の位置情報等の各種データ等を記憶するデータベース19(以下、「DB19」とも言う。)が接続されている。
【0047】
図3に示すように、赤外線通信機7は携帯電話機12等の赤外線通信機を内蔵した通信装置との間でデータの送受を行なう。アダプタージャック9は、メモリカードリーダ13を接続する端子である。アダプタージャック9にメモリカードリーダ13を接続することで、そのメモリカードリーダ13に装着されたメモリカード14に格納されたデータを内部に取り込むことができる。より具体的には、メモリカード14に格納されたデータは、新規な目的物の情報(経度・緯度を含む位置情報,種別情報等)などの更新情報があり、その更新情報が制御部18経由で装置に内蔵されるデータベース19に格納(ダウンロード)され、データ更新がされる。なお、メモリカードリーダ13の機能は、ケース本体11内に内蔵するように構成してもよい。
【0048】
データベース19は、制御部18のマイコン内あるいはマイコンに外付けした不揮発性メモリ(たとえばEEPROM)である。データベース19には、出荷時に一定の目的物に関する情報を登録しており、その後に追加された目的物についてのデータ等が上記のようにしてデータ更新することができる。また、データ更新は、赤外線通信機7を介して行なうこともできる。
【0049】
ケース本体11には、図示外のDCジャックが設けられており、図示外のシガープラグコードが接続され、そのシガープラグコードを介して車両のシガーソケットに接続して電源供給を受ける。無線受信器15は、飛来する所定周波数の無線を受信する。リモコン受信器16は、赤外線によりリモコン(携帯機:子機)17とデータ通信をし、装置に対する各種の設定を行なう。また、スイッチ部3も制御部18に接続され(図示省略)、リモコン17と同様の設定を行えるようになっている。リモコン17には、待受切替ボタン、詳細切替ボタン、履歴表示ボタン、キャンセルボタン、決定ボタンと、上下左右の十字ボタンを備えている。
【0050】
また、制御部18は、上記の各種の入力機器(GPS受信器8、マイクロ波受信器4、無線受信器15、リモコン受信器16、メモリカードリーダ13、赤外線通信機7)から入力される情報に基づき所定の処理を実行し、出力機器(表示部5,警報ランプ6,スピーカ20)を利用して所定の警報・メッセージを出力する。なお、これらの基本構成は、基本的に従来のものと同様のものを用いることができる。
【0051】
本実施形態のレーダー探知機1における機能は、制御部18に有するCPU(コンピュータ)が実行するプログラムとして制御部18のEEPROM32に格納され、これを制御部18に有するCPU(コンピュータ)が実行することで実現される。
【0052】
制御部18の有するプログラムによってコンピュータが実現する機能としては、待ち受け画面表示機能、レーダースコープ表示機能、GPS警報機能、レーダー波警報機能、無線警報機能、トンネル内速度測定装置警報機能などが挙げられる。
【0053】
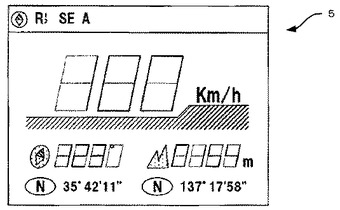
待ち受け画面表示機能は、図4に示すように、GPS受信器8によって検出した自車両の速度、緯度、経度、高度を表示する機能である。レーダースコープ表示機能は、図5に示すように、GPS受信器8によって検出した現在位置から所定の範囲内(例えば約1kmの範囲内)にある目的物をデータベース19に記憶された位置情報に基づいて検索し、自車位置と目的物の位置との相対的な位置関係を表示部5に表示させる機能である。図5中の左側の「W」が西、右側の「E」が東、上側の「N」が北の方角を示し、「W」と「E」を結ぶ左右方向の線と「N」から下へ伸びる上下方向の線との交点にあるアイコンが自車位置を示している。また「L」「RD」「P」「N」等の文字を有するアイコンが目的物の種類と位置を示す。図4に示すような待ち受け画面表示機能実行中にリモコン17に設けた待受切替ボタンの押下が検出された場合、図5に示すようなレーダースコープ表示機能に切り替える。また、レーダースコープ表示機能実行中にリモコン17に設けた待受切替ボタンの押下が検出された場合、待ち受け画面表示機能に切り替える処理を行う。
【0054】
制御部18は、待ち受け画面表示機能またはレーダースコープ表示機能の実行中に、発生したイベントに応じて、GPS警報機能、レーダー波警報機能、無線警報機能、トンネル内速度測定装置警報機能等の各機能を実現する処理を実行する。
【0055】
GPS警報機能は、待ち受け画面表示機能またはレーダースコープ表示機能の実行中に、データベース19に記憶された目的物の緯度経度とGPS受信器8によって検出した現在位置の緯度経度から両者の距離を求め、求めた距離がデータベース19に記憶された接近警報距離になった場合に、データベース19に記憶された写真または模式図のデータを読み出して表示部5に表示させるとともに、データベース19に記憶された音声データを読み出してスピーカ20から接近警報音声を出力する接近報知を行なう機能である。
【0056】
こうした目的物としては、固定式速度測定装置(レーダーのようにレーダー波(マイクロ波)を発する速度測定装置やループコイルのように、レーダー波を発しない速度測定装置を含む)、制限速度切替りポイント、取締エリア、検問エリア、駐禁監視エリア、Nシステム、交通監視システム、交差点監視ポイント、信号無視抑止システム、警察署、事故多発エリア、車上狙い多発エリア、急/連続カーブ(高速道)、分岐/合流ポイント(高速道)、ETCレーン事前案内(高速道)、サービスエリア(高速道)、パーキングエリア(高速道)、パーキングエリア(高速道)、ハイウェイオアシス(高速道)、スマートインターチェンジ(高速道)、PA/SA内 ガソリンスタンド(高速道)、トンネル(高速道)、ハイウェイラジオ受信エリア(高速道)、県境告知、道の駅、ビューポイントパーキング等があり、これらの目的物の位置を示す緯度経度情報と目的物の種別情報と表示部5に表示する模式図または写真のデータとスピーカ20から出力する音声の音声データとを対応付けてデータベース19に記憶している。
【0057】
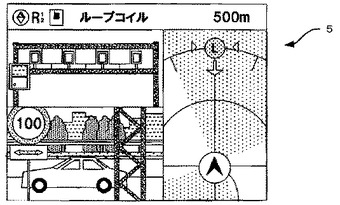
例えば、図4の待ち受け画面表示機能または図5のレーダースコープ機能の実行中に、目的物であるループコイルと自車との距離がデータベース19に記憶された接近警告距離である2km、1km、500mのいずれかになった場合には、目的物であるループコイルの模式図または写真のデータをデータベース19から読み出して表示部5に表示させるとともに、データベース19に記憶された音声データを読み出してスピーカ20から警報音声を出力する接近報知を行なう。例えば、500mに接近した場合には、図6のように、画面右側に図5と同様のレーダースコープ画面を表示して目的物であるループコイルと自車位置との位置関係を表示するとともに、ループコイルを示す目的物であるループコイルの模式図または写真のデータをデータベース19から読み出して表示部5に表示させ、「500m先ループコイルです、スピード注意」という音声データをデータベース19から読み出してスピーカ20から出力させる。また、警報音声の出力中は、警報ランプ6を点燈させる。
【0058】
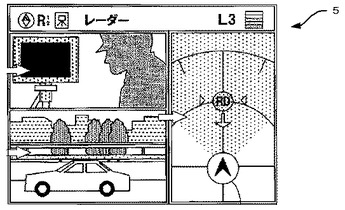
レーダー波警報機能は、マイクロ波受信器4によって速度測定装置(移動式レーダー等のレーダー波を発する速度測定装置)から発せられる周波数帯のマイクロ波に対応する信号が検出された場合に、表示部5に対して警報画面を表示するとともに、スピーカ20から警報音を出力する警報機能である。例えば、レーダーの発するマイクロ波の周波数帯のマイクロ波がマイクロ波受信器4によって検出された場合に、図7に示すように、データベース19に記憶されたレーダーの模式図または写真を表示部5に警報画面として表示するとともに、データベース19に記憶された音声データを読み出して「レーダーです。スピード注意」という音声をスピーカ20から出力する。音声出力中は、警報ランプ6を点燈させる。
【0059】
無線警報機能は、無線受信器15によって、緊急車両等の発する無線を受信した場合に、その走行等の妨げとならないよう、警報を発する機能である。無線警報機能においては、取締無線、カーロケ無線、デジタル無線、特小無線、署活系無線、警察電話、警察活動無線、レッカー無線、ヘリテレ無線、消防ヘリテレ無線、消防無線、救急無線、高速道路無線、警備無線等の周波数をスキャンし、スキャンした周波数で、無線を受信した場合には、データベース19に無線種別ごとに記憶されたその周波数に対応する無線を受信した旨の模式図を警報画面として表示部5に表示するとともに、データベース19に無線種別ごとに記憶された音声データを読み出して、スピーカ20からその無線の種別を示す警報音声を出力する。たとえば、取締無線を受信した場合には「取締無線です。スピード注意」のように音声を出力する。音声出力中は、警報ランプ6を点燈させる。
【0060】
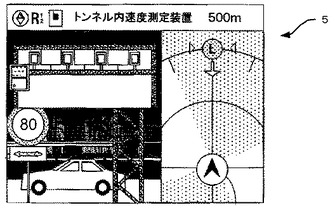
本実施例のレーダー探知機1は、さらに、トンネル内速度測定装置警報機能を備える。この機能は、GPS受信器8によって、GPS電波が受信できず、現在位置や現在速度が取得できないトンネル内に設置された速度測定装置(ループコイルタイプなどの速度測定装置)の位置への接近警報を発する機能である。すなわち、待ち受け画面表示機能またはレーダースコープ表示機能の実行中に、データベース19に記憶されたトンネル内速度測定装置の緯度経度と現在位置推定処理によって求めた現在位置の緯度経度から両者の距離を求め、求めた距離がデータベース19に記憶された接近警報距離になった場合に、図10に示すように、データベース19に記憶された写真または模式図のデータを読み出して表示部5に表示させるとともに、データベース19に記憶された音声データを読み出してスピーカ20から接近警報音声を出力する接近報知(警報)を行なう機能である。この機能を実現するために制御部18は、現在位置推定処理及びトンネル内速度測定装置警報処理を行う。
【0061】
トンネル内や高架下等では、GPS受信器8によって、GPS電波が受信できず、現在位置や現在速度が取得できないため現在位置推定処理を行う。
【0062】
この現在位置推定処理及びトンネル内速度測定装置警報処理のために、データベース19には、トンネル内速度測定装置と、トンネル内速度測定装置の位置へ至るトンネル内の道路上位置に設けた誘導点の位置情報を記憶している。例えば、図11に示すように、点a(現在位置が取得できない状態となることが想定される位置)から点fに至る破線部分がトンネルでありこの部分の両端外側の実線部分がトンネル外である道路において、トンネル内速度測定装置(例えばループコイル式速度測定装置)eの位置(現在位置が取得できない箇所にある目的物の位置)の位置情報(緯度経度情報)と、トンネル内速度測定装置eの位置へ至るトンネル内の道路上位置に順に設けた誘導点b,c,dの位置情報(緯度経度情報)と、その道路が一般道であるか高速道であるかの道路種別情報とを対応付けてデータベース19に記憶しておく。最初の誘導点である誘導点bはトンネル進入前のGPS受信器8によって測位可能な位置から1km以内の位置に設定している(誘導点bから1kmの範囲を円Bで図示している)。誘導点bと誘導点c、誘導点cと誘導点dのように、ある誘導点から次の誘導点までの距離も1km以内に設定しており、かつ、ある誘導点から次の誘導点が1つに決定できる位置に各誘導点の位置を設定する。すなわち、すでに誘導に利用済みの誘導点を除いて1km以内には誘導点が1つになるように各誘導点の位置を設定する。図11では、誘導点cから1kmの範囲を円Cで、誘導点dから1kmの範囲を円Dで図示している。図11のように誘導点bの位置から1km以内には次の誘導点であるcのみを配置し、誘導点cの位置から1km以内には次の誘導点であるdのみを配置する(誘導点bの位置も誘導点cの位置から1km以内の位置であるがすでに誘導に利用済みであるので、次の誘導点の候補から除外し、結果、次の誘導点はdに定まる。)
【0063】
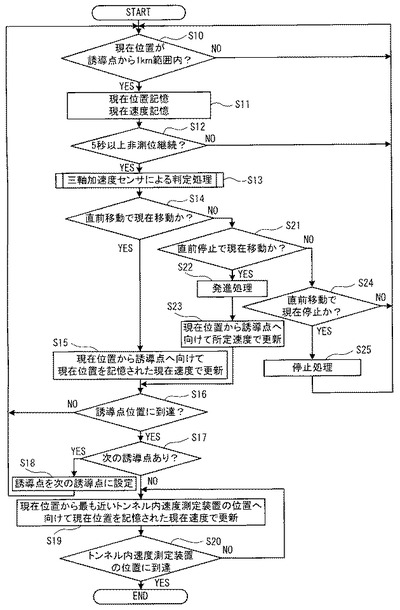
次に、現在位置推定処理について、図12のフローチャートを参照して説明する。まず、現在位置が誘導点から1km以内か否かを判定する(S10)。現在位置が誘導点から1km以内である場合(S10:YES)、S11へ移行する。一方、現在位置が誘導点から1km以内でない場合(S10:NO)、この判定(S10)を繰り返し実行する。
【0064】
S11では、誘導点から1km以内に現在位置が入る誘導点を現在の誘導点として設定し、GPS受信器8から取得した現在位置を制御部18内のRAM33上に設けたトンネル内現在位置記憶領域に記憶し、GPS受信器8から取得した現在速度を制御部18内のRAM33上に設けたトンネル内現在速度記憶領域に記憶し、制御部18のマイコン内のタイマTをリスタートする。なお、GPS受信器8から現在位置や現在速度が取得できない場合にはこれらの記憶処理とタイマTのリスタートは行わない。
【0065】
続くS12では、GPS受信器8から現在位置と現在速度が取得できない状態(この状態を非測位状態と称する)が5秒以上継続しているか否かを判定する。非測位状態が5秒以上継続している場合(S12:YES)、S13へ移行し、非測位状態が5秒以上継続していない場合には、S10へ戻る。非測位状態が5秒以上継続している場合(S12:YES)は、一般的に、GPS衛星からの電波をGPS受信器8で受信できない状態であり、トンネルの中や高架下や高層ビルの陰に入っている場合である。このような場合でも、自動車は所定速度で移動しているので現在位置や速度が分からなくなるが、レーダー探知機の機能を維持する必要がある。
【0066】
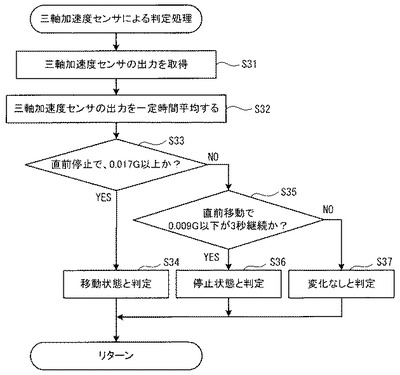
次いで、S13では、本発明のポイントである三軸加速度センサによる判定処理を行う(S13)。この判定処理は、具体的には、図13に示す三軸加速度センサによる判定処理のサブルーチンに基づいて行われる。図13を参照して、三軸加速度センサによる判定処理を説明する。まず、三軸加速度センサ21の出力(検出値)を取得する(S31)。ここでは、X軸、Y軸、Z軸の3つを取得する(S31)。次いで、三軸加速度センサ21の各軸毎に出力(検出値)の振幅を一定時間平均化する(S32)。具体的には、三軸加速度センサ21からの各軸毎に出力(検出値)の振幅を現時点から過去所定秒間(一例として、1秒間)において、一定時間間隔毎(一例として、40ms毎)に検出し、所定回数分(一例として25回分)平均化する(S32)。
【0067】
次いで、現在状態が停止状態で、S32で平均化した値が、X軸、Y軸、Z軸の何れか1つでも0.017G以上であれば(S33:YES)、現在は移動状態であると判定し、現在状態を移動状態に変更してRAM33に記憶し、直前状態を停止状態に変更してRAM33に記憶する(S34)。以降、RAM33に記憶された「現在状態」が「移動状態」であることを「現在移動」ともいい、RAM33に記憶された「現在状態」が「停止状態」であることを「現在停止」ともいう。また、RAM33に記憶された「直前状態」が「移動状態」であることを「直前移動」ともいい、RAM33に記憶された「直前状態」が「停止状態」であることを「直前停止」ともいう。なお、初めてS33を実行する際の現在状態と直前状態は移動状態に初期設定している。次いで、図12のフローチャートにリターンする。振動の検知をX軸、Y軸、Z軸の三軸で行っているのは、自動車の走り方により振動が出やすい軸が異なるからである。また、等速運動の場合には、Z軸に振動が出やすい。さらに、振動の検知をX軸、Y軸、Z軸の三軸で行えば、路面が平面でZ軸の振幅が取りにくい場合でも、加減速はX軸で、方向回転はY軸で検知できる。従って、最終的にどれかの軸で振幅が大きくなれば動いていると判定することができる。
【0068】
また、現在状態が移動状態で、S32で平均化した値が、X軸、Y軸、Z軸の全てが0.009G以下が3秒以上継続した場合は(S33=NO,S35:YES)、現在は停止状態であると判定し、現在状態を停止状態に変更してRAM33に記憶し、直前状態を移動状態に変更してRAM33に記憶する(S36)。次いで、図12のフローチャートにリターンする。また、S33:NO,S35:NOと判断された場合には、現在は直前の状態から変化なしと判定し、現在状態、直前状態のRAM33の記憶内容を変更する処理は行わず、現在状態、直前状態は変化させないままにする(S37)。次いで、図12のフローチャートにリターンする。尚、S35に規定の3秒は、必ずしもこの時間には限られず、例えば、1秒から5秒の間であれば、一回でも0.009G以下が検出されたことにより直ちに移動状態から停止状態になったとの誤判断がされることがない。また、S33の閾値0.017G及びS35の閾値0.009Gは一例であり、自動車の振動特性に合わせて適宜設定すればよい。
【0069】
また、S33の判断では、X軸、Y軸、Z軸の全てが同一の閾値0.017G以上であれば、現在は移動状態であると判定してもよい(S34)。また、S35の判断では、X軸、Y軸、Z軸の何れか1つでも閾値0.009G以下が3秒以上継続した場合は(S35:YES)、現在は停止状態であると判定してもよい(S36)。S33の閾値は、X軸、Y軸、Z軸の三軸共に同じ値の0.017Gを用いているが、特定の軸のみ他の軸より大きくしてもよい。また、S35の閾値は、X軸、Y軸、Z軸の三軸共に同じ値の0.009Gを用いているが、特定の軸のみ他の軸より大きくしてもよい。このようにすることにより、自動車の振動特性に合わせた閾値を設定して、より正確に判定することが可能になる。尚、上記の閾値は、カット&トライで自動車の振動特性に合うように設定すればよい。
【0070】
次いで、「直前移動」であり、三軸加速度センサによる判定処理(S13)の判定が「現在移動」の場合(S14:YES、)トンネル内現在位置記憶領域に記憶された現在位置(推定位置)から、現在の誘導点の方向へ向けて、S11でトンネル内現在速度記憶領域に記憶された現在速度(推定速度)にて走行しているものとして、タイマTの示す時間にこの現在速度を乗じて、トンネル内現在位置記憶領域に記憶された現在位置を更新する(S15)。そして、タイマTをリスタートする(S15)。
【0071】
また、「直前停止」であり、「現在移動」の場合(S14:NO,S21:YES)、0km/hから所定速度に加速する発進処理を行う(S22)。この発進処理では、一例として、現在の誘導点の位置情報に対応付けて記憶された道路種別情報が一般道であれば、0km/hから60km/hに速度を10秒かけてゆっくりUPさせる。ゆっくりUPさせる処理としては、この例でいえば、例えば、0km/hから60km/hに10秒かけてリニアにアップさせる処理と処理が簡便でよい。以下別の例でも同様である。DOWNさせる場合も同様である。また、現在の誘導点の位置情報に対応付けて記憶された道路種別情報が高速道であれば、0km/hから80km/hに速度を10秒かけてゆっくりUPさせる。次いで、トンネル内現在位置記憶領域に記憶された現在位置(推定位置)から、現在の誘導点の方向へ向けて、トンネル内現在速度記憶領域に記憶された現在速度(推定速度)にて走行しているものとして、タイマTの示す時間にこの一般道60km/h、高速道80km/hを乗じて、トンネル内現在位置記憶領域に記憶された現在位置を更新する(S23)。そして、タイマTをリスタートする(S23)。尚、10秒かけてゆっくりUPしているのは、通常の自動車では、停止状態から60km/hや80km/hに加速できるのは、10秒程度であるからである。また、この10秒は、必ずしもこの時間に限られず、自動車の加速性能を考慮して、適宜設定すればよい。
【0072】
また、「直前移動」であり、「現在停止」の場合(S21:NO,S24:YES)、停止処理を行う(S25)。この停止処理では、一例として、現在の誘導点の位置情報に対応付けて記憶された道路種別情報が一般道であれば、60km/hから0km/hに速度を2秒かけてDOWNさせる。また、現在の誘導点の位置情報に対応付けて記憶された道路種別情報が高速道であれば、80km/hから0km/hに速度を2秒かけてDOWNさせる。その後、S10に戻る。尚、停止処理(S25)の2秒は、必ずしもこの時間に限られず、例えば、1秒から5秒程度で有れば、自然な停止感が得られる。
【0073】
続くS16では、トンネル内現在位置記憶領域に記憶された現在位置が現在の誘導点の位置に到達したか否かを判定する。トンネル内現在位置記憶領域に記憶された現在位置が現在の誘導点の位置に到達した場合(S16:YES)、S17へ移行する。一方、トンネル内現在位置記憶領域に記憶された現在位置が現在の誘導点の位置に到達していない場合(S16:NO)、S10へ戻る。
【0074】
S17では、次の誘導点があるか否かを判定する。すなわち、未利用の誘導点であって、誘導点から1km以内に現在位置が入る誘導点があるか否かを判定する。このような誘導点がある場合(S17:YES)、S18へ移行する。一方このような誘導点がない場合(S17:NO)、S19へ移行する。
【0075】
S18では、未利用の誘導点であって、誘導点から1km以内に現在位置が入る誘導点を次の誘導点として設定し、S10へ移行する。
【0076】
S19では、現在位置から最も近いトンネル内速度測定装置の位置へ向けてトンネル内現在速度記憶領域に記憶された現在速度にて走行しているものとして、タイマTの示す時間にこの現在速度を乗じて、トンネル内現在位置記憶領域に記憶された現在位置を更新する。そして、タイマTをリスタートする。
【0077】
続くS20では、トンネル内現在位置記憶領域に記憶された現在位置が現在位置から最も近いトンネル内速度測定装置の位置に到達したか否かを判定する。トンネル内現在位置記憶領域に記憶された現在位置が現在位置から最も近いトンネル内速度測定装置の位置に到達した場合(S20:YES)、本処理を終了して、再度S10から処理を開始する。一方、トンネル内現在位置記憶領域に記憶された現在位置が現在位置から最も近いトンネル内速度測定装置の位置に到達していない場合(S20:NO)、S19へ戻る。
【0078】
以上のような現在位置推定処理によって求められる現在位置及び現在速度はトンネル内現在位置記憶領域及びトンネル内現在速度記憶領域それぞれ参照することで他の処理から取得することができる。
【0079】
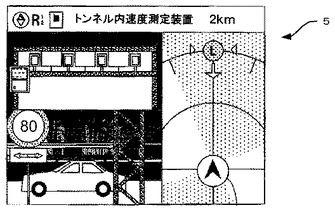
制御部18は、マルチタスクにてトンネル内速度測定装置警報処理を行う。トンネル内速度測定装置警報処理は、トンネル内速度測定装置eとのこの現在位置の関係が2km、1km、500mになった際にそれぞれ接近警報を発する処理である。接近警報は、従来のGPS警報の処理と同様であるが、参照する現在位置は、トンネル内現在位置記憶領域に記憶された現在位置とする。例えば、図4の待ち受け画面表示機能または図5のレーダースコープ機能の実行中に、目的物であるトンネル内速度測定装置の位置と現在位置との距離がデータベース19に記憶された接近警告距離である2km、1km、500mのいずれかになった場合には、目的物であるトンネル内速度測定装置の模式図または写真のデータをデータベース19から読み出して表示部5に表示させるとともに、データベース19に記憶された音声データを読み出してスピーカ20から警報音声を出力する接近報知を行なう。例えば、2kmに接近した場合には、図8のように、画面右側に図5と同様のレーダースコープ画面を表示して目的物であるトンネル内速度測定装置と自車位置との位置関係を表示するとともに、トンネル内速度測定装置を示す目的物であるトンネル内速度測定装置の模式図または写真のデータをデータベース19から読み出して表示部5に表示させる。データベース19にはトンネル内速度測定装置の位置情報に関連付けて、当該トンネル内速度測定装置の設置箇所の制限速度に関する情報を記憶しておき、図8の画面内にある制限速度標識内にその制限速度を表示する(図8では80km/hが制限速度として記憶されている場合の表示例である)。同時に「2km先トンネル内速度測定装置です。制限速度は80km/hです。」という音声データをデータベース19から読み出してスピーカ20から出力させる。また、警報音声の出力中は、警報ランプ6を点燈させる。
【0080】
以上のような処理によれば、図11において、点oから点aへ向けて本車載機器を設置した車両が走行する場合、トンネル進入点aでGPS8は測位不能(非測位)になり、制御部18は、現在位置(緯度経度情報)と現在速度が取得不能となる。そこで、制御部18は、現在位置推定処理によって、測位可能であったトンネル進入点aの直前の現在位置から誘導点bに向けての直線上を、測位不能になる直前の速度(以下現在速度と称する)で進行しているものとして現在位置を更新していき、現在位置が誘導点bの位置に達したら、次の誘導点cに向けて、bcを結ぶ直線上で、同様に現在位置を更新していくこととなる。そして、現在位置が誘導点cの位置に達したら、次の誘導点dに向けて、cdを結ぶ直線上で、同様に現在位置を更新していく。そして次の誘導点がないため、現在位置から最も近いトンネル内速度測定装置eへ向けて、deを結ぶ直線上で、同様に現在位置を更新する。トンネル内速度測定装置eに現在位置が到達したら、現在位置の更新を停止する。そのまま車両が走行しつづけ、トンネル退出点fに至った場合、GPS受信器8から現在位置と現在速度が取得可能となる。
【0081】
制御部18は、マルチタスクにてトンネル内速度測定装置警報処理を行うので、トンネル内速度測定装置eとのこの現在位置の関係が2km、1km、500mになった際にそれぞれ接近警報が発せられる。図11には、トンネル内速度測定装置eの位置から2kmの箇所を円E1で、1kmの箇所を円E2で、500mの箇所を円E3で図示している。地点o、地点a、地点b、地点c、地点d、地点e、地点fの順に車両が走行する場合、まず、bcを結ぶ直線と円E1との交点で、図8に示すようなトンネル内速度測定装置まで2kmであることを示す警報画面が表示部5に表示され、「2km先トンネル内速度測定装置です。制限速度は80km/hです。」という警報音声がスピーカ20から報知される。次にdeを結ぶ直線と円E2との交点で、図9に示すようなトンネル内速度測定装置まで1kmであることを示す警報画面が表示部5に表示され、「1km先トンネル内速度測定装置です。制限速度は80km/hです。」という警報音声がスピーカ20から報知される。最後にdeを結ぶ直線と円E3との交点で、図10に示すようなトンネル内速度測定装置まで500kmであることを示す警報画面が表示部5に表示され、「500m先トンネル内速度測定装置です。制限速度は80km/hです。」という警報音声がスピーカ20から報知される。
【0082】
以上のように、本発明に係る電子機器によれば、位置情報や移動速度を取得できない状況であっても、三軸加速度センサ21を用いて振動を検出して、現在は、停止状態か移動状態かを判定するので、従来よりも的確に、目的物の設置位置に関する情報の報知を行なうことができる。
【0083】
なお、本発明の実施形態はこれに限らず各種の形態を採りうる。例えば、本実施例で説明した速度や距離の値などは、適宜の値をとることができる。
【0084】
また、たとえば、最初の誘導点や次の誘導点は、予め定めたほかのルールにそって決定するようにしてもよい。例えば、データベース19の誘導点の位置情報と関連付けて図11の矢印で示すような誘導点への許容進入方向に関する情報(例えば誘導点の位置から北方向を0度とした時計回りの角度情報など)を記憶し、現在位置推定処理の図12のS10やS18での誘導点の有無や決定の処理では、さらに、この許容進入方向に対して所定角度(例えばプラスマイナス30度)の範囲内にトンネル内現在位置記憶領域に記憶された現在位置がある場合にのみ、その誘導点を対象の誘導点として決定すると決定するとよい。このようにすれば、近接する場所に複数の誘導点があったとしても、許容進入方向を満たすものを誘導点として特定することができる。
【0085】
また、たとえば、速度測定装置の設置箇所の制限速度に関する情報の報知を行なった場合、制限速度を越える速度で走行している車両は、速度を落とす可能性が高い。すなわち、例えば、図8〜図10に示して説明したようにトンネル内速度測定装置の2km手前・1km手前・500m手前の3箇所で、接近警報を報知する構成の場合であって、データベース19に記憶されたトンネル内速度測定装置の設置箇所の制限速度が80km/hであり、トンネル内現在速度記憶領域に記憶された現在速度が120km/hであり、実際も120km/hを維持して走行している際に、データベース19に記憶されたトンネル内速度測定装置の設置箇所の制限速度が80km/hであることの1回目の報知(2km手前)を行なうと、ドライバは減速するはずである。したがって、この場合、例えば、100km/hに減速したものとしてトンネル内速度測定装置警報処理における1回目の報知(2km手前)後に、トンネル内現在速度記憶領域に記憶された現在速度をデータベース19に記憶された当該トンネル内速度測定装置の制限速度の20%増しの速度(この例では96km/h)へ補正する処理を行う。現在速度の補正処理をしないと500m手前での報知が、実際の500m手前よりも手前になってしまい、再度加速してしまうなどの問題が生じる可能性があるが、このようにすれば、誤差を小さくすることができ、適切な警報を行なうことができる。したがって、より的確に、目的物の設置位置に関する情報の報知を行なうことができる。なお、S11で記憶された現在速度が当該トンネル内速度測定装置の設置箇所の制限速度を越える関係にある場合に、この補正を行うようにするとよく、S11で記憶された現在速度が当該トンネル内速度測定装置の設置箇所の制限速度を越えない場合には補正は行わなくてもよい。また例えばデータベース19の当該制限速度切替りポイントに、切り替る制限速度の値を関連付けて記憶しておき、トンネル内現在位置記憶領域に記憶された現在位置が、データベース19の制限速度切替りポイントの位置に到達した場合にも、同様にして、この制限速度の値を用いて現在速度の補正を行うようにしてもよい。例えば、100km/hから80km/hへ切り替わるという情報を記録しておき、この割合分(80/100)を現在速度に乗じて新たな現在速度としてトンネル内現在速度記憶領域に記憶するなどして、現在速度を補正する(減速する)。
【0086】
また、上述した実施例では、GPS受信器8から取得した現在速度を制御部18内のRAM33に設けたトンネル内現在速度記憶領域に記憶してこの速度で走行しているものとして処理を行ったが、GPS受信器8によって速度が取得できなくなるトンネル進入直前の速度は、最も精度が低いデータと言える。また、道路に急カーブなどの箇所が含まれるとその点では走行速度が低くなる可能性が高い。そこで、現在位置が取得できない箇所と目的物の位置との間の標準速度をトンネル内現在速度記憶領域に記憶してこの速度で走行しているものとして処理を行うようにしてもよい。このようにすれば、目的物との接近関係の判定をより精度よく行うことができる。
【0087】
本実施例では、位置の取得はGPS受信器8で行うこととしたが、例えばビーコン、無線基地局情報等から送信される情報を受信する受信機とすることもできる。また例えば車速パルスを取得するセンサ等を用いることができる。しかし、両者を共用できるものを用いると特によくGPS受信器(GPSモジュール)8が特によい。
【0088】
また、目的物の位置へ推定速度で進行している旨を示す報知とは別にさらにGPS受信器8が測位状態にあるか非測位状態にあるかを示す報知を行うとよい。例えば、目的物の位置へ推定速度で進行している旨を示す報知を行うアイコン等の表示や音声出力とGPS受信器8が測位状態にあるか非測位状態にあるかを示す報知を行うアイコン等の表示や音声出力とを行うようにするとよい。このようにすれば、GPSの受信状態を知ることができるとともに、目的物の位置へ推定速度で進行しているものとして目的物との接近関係が報知される状態にあるのか否かが容易に理解できる。
【0089】
また本実施例では、現在位置が取得できない箇所にある目的物の例としてトンネル内速度測定装置の例を用いて説明したが、例えば図11のトンネル内速度測定装置eとした場所がトンネル出口直後の場所である場合ように、現在位置が取得しにくい箇所にある目的物としてもよい。すなわち現在位置が取得できない箇所にある目的物とは、現在位置が取得できない可能性のある箇所にある目的物を含むとよい。トンネル出口直後は、例えば、予め定めた基準距離以内とすることができる。また、現在位置が取得できない箇所にある目的物としては、トンネル内速度測定装置に限らず、各種の箇所にある目的物として適用できる。目的物(オブジェクト)は具体的に実在する物体としてもよいし、具体的に実在するものだけでなく、仮想的に存在するものを含むようにしてもよい。特に、電波によって現在位置を取得する構成の場合には現在位置が取得できない箇所として例えば電波状況の悪い箇所とし、目的物としては交通取締りや安全運転・エコ運転に関する情報を発すべき場所などとするとよい。
【0090】
また本実施例では、電子機器の一例として、レーダー探知機1を用いて説明したが、電子機器としては、レーダー探知機1に限られず、カーナビゲーションシステム、スマートフォン等に図12及び図13に示すプログラムを組み込んで、実施してもよい。
【符号の説明】
【0091】
1 レーダー探知機
2 ソーラーパネル
4 マイクロ波受信器
5 表示部
6 ランプ
7 赤外線通信機
8 GPS受信器
9 アダプタージャック
10 電源スイッチ
11 ケース本体
13 メモリカードリーダ
14 メモリカード
15 無線受信器
16 リモコン受信器
18 制御部
19 データベース
20 スピーカ
21 三軸加速度センサ
【技術分野】
【0001】
本発明は、目的物の位置に関する報知を行なう電子機器及びプログラムに関するものである。
【背景技術】
【0002】
従来、車両に搭載され、その車両の運転者等に各種の警報を報知する車載用電子機器が知られている。たとえば、自動車の速度を測定する速度測定装置のような目的物に接近した場合に、運転者に対してその警告を報知するレーダー探知機等の車載用電子機器が知られている。
【0003】
この車載用電子機器の一例として、予め速度測定装置の設置位置情報を記憶させておき、GPS(Global Positioning System )等によって取得した現在位置が、記憶した設置位置に近づいた場合(所定の接近関係になった場合)に、マイクロ波の検知の有無に関係なく警告を発するようにしたレーダー探知機がある(例えば、特許文献1参照)。この特許文献1に記載のレーダー探知機では、現在位置が、速度測定装置の設置位置から1000m以内に入った位置になった場合に第一の警報を行い、さらに速度測定装置の設置位置から500m以内に入った位置になった場合に、第二の警報を行う等している。また、警報の一例としては、本体のLED等のランプを点滅させたり、音声やメロディー、電子音等の所定の警告音をスピーカ等から出力させたり、液晶パネル等の所定の警告画面を表示するなどしている。
【0004】
このレーダー探知機では、目的物の位置情報を記憶させておき、GPS等によって取得した現在位置が、記憶した目的物の位置と所定の接近関係になった場合に、警報を行う。従って、現在位置が正しく取得できる必要がある。
【0005】
ところが、例えばトンネルや高架下に入った場合など、GPSで衛星電波が取得できないような場所では、現在位置が取得できない状況になる場合がある。また、GPSからは自車の移動速度も取得できるが(現在位置の変化または衛星電波のドップラーシフト量等から算出できる)、例えばトンネルや高架下に入った場合など、GPSで衛星電波が取得できないような場所では移動速度も取得できない。
【0006】
そこで、特許文献1に記載のレーダー探知機では、データベースに、トンネル内速度測定装置eと装置eの位置へ至るトンネル内の道路上位置に設けた誘導点b,c,dの位置情報を記憶する。誘導点bはトンネル進入前のGPS受信器によって測位可能な位置から1km以内の位置に設定し、各誘導点間の距離も1km以内に設定している。トンネル進入点aで測位不能になる直前の現在位置から誘導点bに向けて測位不能になる直前の速度で進行しているものとして現在位置を更新していき、各誘導点位置に到達したら次の誘導点に向けて同様に現在位置を更新する。次の誘導点がない場合にはトンネル内速度測定装置へ向けて同様に現在位置を更新する。トンネル内速度測定装置eとの現在位置の関係が2km、1km、500mになった際にそれぞれ接近警報を発するようにしている。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開2011−39038号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
しかしながら、上記の電子機器では、トンネル進入点aで測位不能になる直前の現在位置から誘導点bに向けて測位不能になる直前の速度で進行しているものとして現在位置を更新しているので、現実の現在位置との間に誤差が生じるという問題点がある。
【0009】
そこで、本発明は、位置情報や移動速度を取得できない状況であっても、電子機器が移動しているのか、停止しているのかを正確に判定でき、的確に目的物の設置位置に関する情報の報知を行なうことのできる電子機器及びプログラムを提供することを目的とする。
【課題を解決するための手段】
【0010】
上述した目的を達成するために、本発明に係る電子機器は、受信手段が受信した電波に基づいて、現在位置を取得するための位置取得手段と、目的物の位置情報を記憶する記憶手段と、前記位置取得手段によって取得した現在位置と前記記憶手段によって記憶された目的物の位置情報との接近関係に基づいて当該目的物の設置位置に関する情報の報知を報知手段から報知させる制御を行う制御手段とを備える電子機器において、現在の移動速度を取得するための速度取得手段と、当該電子機器の振動状態を検出する振動検出手段と、当該振動検出手段の検出結果から当該電子機器が移動しているか否かを判定する移動判定手段とを備え、前記記憶手段は、前記目的物の位置情報として現在位置が取得できない箇所にある目的物の位置情報を記憶し、前記移動判定手段が当該電子機器が移動していないと判定した場合は、前記制御手段は、現在位置が取得できない箇所にある前記記憶手段に記憶された目的物の位置へ進行しておらず、現在位置に停止しているものとして前記記憶手段に記憶された現在位置が取得できない箇所にある目的物の位置へ接近関係を判定することを特徴とする。
【0011】
このようにすることで、位置情報や移動速度を取得できない状況であっても、従来よりも的確に、電子機器(当該電子機器が設置された車両)が移動しているのか停止しているのかを判定でき、目的物の設置位置に関する情報の報知を行なうことができる。
【0012】
また、本発明に係る電子機器では、前記振動検出手段としては、三軸加速度センサを用い、前記移動判定手段は、前記三軸加速度センサの各軸毎の検出値を当該電子機器が移動しているか否かを判定する所定の閾値と比較して判定し、前記三軸加速度センサの各軸毎の検出値を判定する前記所定の閾値の内の少なくとも一つを他の二つと異ならせるようにしてもよい。
【0013】
このようにすることで、当該電子機器が移動しているか否かをより的確に判定することができる、例えば、電子機器(当該電子機器が設置された車両)が移動している場合の三軸の各方向における振動の差に対応して、閾値を定めると、電子機器の移動判定をより正確に行うことができる。
【0014】
また、本発明に係る電子機器では、前記振動検出手段としては、三軸加速度センサを用い、前記移動判定手段は、前記三軸加速度センサの各軸毎の検出値を当該電子機器が移動しているか否かを判定する一つの閾値と比較して判定し、前記三軸加速度センサの各軸毎の検出値のいずれか1つでも前記閾値を越えていたら、当該電子機器が移動していると判定するようにしてもよい。
【0015】
このようにすることで、電子機器(当該電子機器が設置された車両)が移動しているか否かを1つの閾値で、簡単に判定できる。
【0016】
また、本発明に係る電子機器では、前記制御手段は、前記位置取得手段によって現在位置が取得できない状態であり、かつ、前記速度取得手段によって現在の速度が取得できない状態である場合に、前記移動判定手段が前記電子機器が移動していると判定した場合は、現在の推定速度を決定し、前記記憶手段に記憶された現在位置が取得できない箇所にある目的物の位置へ前記推定速度で進行しているものとして当該目的物との前記接近関係を判定するようにしてもよい。
【0017】
このようにすることで、位置情報や移動速度を取得できない状況であっても、移動判定手段が前記電子機器が移動していると判定した場合は、現在の推定速度を決定し、その推定速度で進行しているものとして目的物との接近関係を判定することができる。
【0018】
また、本発明に係る電子機器では、前記記憶手段は、前記目的物の位置情報として現在位置が取得できない箇所と目的物の位置との間の標準速度を少なくとも1つ記憶しておき、前記現在の推定速度の決定は、前記記憶手段に記憶された標準速度に基づいて行うようにしてもよい。
【0019】
このようにすることで、位置情報や移動速度を取得できない状況であっても、移動判定手段が前記電子機器が移動していると判定した場合は、記憶手段に記憶された標準速度に基づいて簡便に現在の推定速度の決定を行うことができる。
【0020】
また、本発明に係る電子機器では、前記現在の推定速度の決定は、前記速度取得手段によって取得できていた過去の速度状態に基づいて行うようにしてもよい。
【0021】
このようにすることで、位置情報や移動速度を取得できない状況であっても、移動判定手段が前記電子機器が移動していると判定した場合は、位置情報や移動速度を取得できなくなる直前の速度状態に基づいて簡便に現在の推定速度の決定を行うことができる。
【0022】
また、本発明に係る電子機器では、前記移動判定手段により前記電子機器が移動していないと判定されている状態で、前記振動検出手段からの検出値が所定の閾値以上となった場合に、前記移動判定手段は、前記電子機器が移動していると判定するようにしてもよい。
【0023】
このようにすることで、簡単に電子機器が移動しているか否かを判定できるため、短時間で判定処理ができ、車両の状態に対する追従性を高めることができる。例えば、位置情報や移動速度を取得できない状況で、前記移動判定手段により前記電子機器が移動していないと判定されている状態では、一度でも、前記振動検出手段からの検出値が所定の閾値以上となった場合に、前記移動判定手段は、前記電子機器が移動していると判定するとよい。このようにすれば、停止状態から移動状態への判定をさらに迅速に行うことができる。
【0024】
また、本発明に係る電子機器では、前記移動判定手段により前記電子機器が移動していると判定されている状態で、前記振動検出手段からの検出値が所定の閾値以下の状態を所定秒間継続した場合に、前記移動判定手段は、前記電子機器が移動していないと判定するようにしてもよい。尚、この所定秒間は、例えば、3秒等の整数に限られるものでなく、3.2秒、3.25秒等の判定に適した任意の時間を設定すればよい。
【0025】
このようにすることで、位置情報や移動速度を取得できない状況であっても、前記移動判定手段により前記電子機器が移動していると判定されている状態では、前記振動検出手段からの検出値が所定の閾値以下の状態を所定秒間継続しないと停止状態と判定しないので、移動状態から停止状態への判定を正確に行うことができる。
【0026】
また、本発明に係る電子機器では、前記移動判定手段により前記電子機器が移動していないと判定されている状態で、前記振動検出手段からの検出値が所定の閾値以上に一回でもなった場合に、前記移動判定手段は、前記電子機器が移動していると判定し、前記移動判定手段により前記電子機器が移動していると判定されている状態で、前記振動検出手段からの検出値が所定の閾値以下の状態を所定秒間継続した場合に、前記移動判定手段は、前記電子機器が移動していないと判定するようにしてもよい。
【0027】
このようにすることで、停止状態から移動状態への判定を迅速に行うことができ、また、移動状態から停止状態への判定を正確に行うことができる。
【0028】
また、本発明に係る電子機器では、前記振動検出手段からの検出値は、一定時間間隔毎に検出した値の所定時間内の平均値であるようにしてもよい。
【0029】
このようにすることで、振動検出手段は、検出値のノイズを平準化することができ、正確な検出を行うことができる。
【0030】
また、本発明に係る電子機器では、前記移動判定手段により前記電子機器が移動していないと判定されている状態から、前記移動判定手段により前記電子機器が移動していると判定された場合には、現在の推定速度は、第一の所定時間かけて停止速度から前記標準速度に上げるようにしてもよい。
【0031】
このようにすることで、停止状態から移動状態へ自然な加速を行うことができる。
【0032】
また、本発明に係る電子機器では、前記移動判定手段により前記電子機器が移動していると判定されている状態から、前記移動判定手段により前記電子機器が移動していないと判定された場合には、現在の推定速度は、前記第一の所定時間より短い第二の所定時間かけて前記標準速度から停止速度に下げるようにしてもよい。
【0033】
自動車等の車両では、停止状態から所定速度までの加速時間より、所定速度から停止状態までの減速時間の方が短い時間であるので、このようにすることで、移動状態から停止状態へ自然な減速を行うことができる。
【0034】
また、本発明に係る電子機器では、前記第二の所定時間は、前記移動判定手段により前記電子機器が移動していると判定されている状態で、前記振動検出手段からの検出値が所定の閾値以下の状態を所定秒間継続した場合に、前記移動判定手段は、前記電子機器が移動していないと判定するために使用する当該所定秒間より長い時間であるようにしてもよい。
【0035】
このように第二の所定時間を所定秒間より長い時間とすることで、所定秒間より長い時間の間、現在の推定速度はゼロにならない。従って、第二の所定時間の間に、振動検出手段からの検出値が所定の閾値以上となった場合には、推定速度はゼロにならないまま、増加していくこととなる。そのため、「所定の閾値以下の状態を所定秒間」を例えば1秒間のように比較的短時間として停止していないにもかかわらず停止したと判定された場合であっても、推定速度はゼロにならずに復帰できる可能性を高めることができる。
【0036】
また、本発明に係る電子機器では、前記第二の所定時間は1秒から5秒の間であり、前記所定秒間は1秒から5秒の間であるようにしてもよい。
【0037】
このようにすることで、例えば推定速度に基づく表示(例えば数値で速度を表示したり、地図上の位置を移動させたり)をする場合、車両を停止させてから、この表示を見たときに、自己の車両停止操作に追従して速度が減少しているように感じさせることができる。
【0038】
また、本発明に係る電子機器では、前記位置取得手段及び前記速度取得手段は、GPSモジュールを用いてもよい。
【0039】
また、本発明に係る電子機器では、前記記憶手段は、現在位置が取得できない箇所にある目的物としてトンネル内の速度測定装置の位置情報を記憶し、前記報知手段からの報知はトンネル内速度測定装置への接近警告としてもよい。
【0040】
また、本発明に係る電子機器では、前記制御手段は、前記目的物の位置へ前記推定速度で進行している旨を示す報知をさせる制御を行うようにしてもよい。
【0041】
このようにすれば、当該電子機器が、目的物との接近関係の判定を、現在位置が取得できない箇所にある目的物の位置へ推定速度で進行しているものとして行なっている状態にあるということを知ることが出来る。したがって、このような報知がなされているときに、推定速度からずれた速度で走行している場合には、接近警告とのずれが生じうることを容易に認識することができ、運転者は予め注意して走行することができる。
【0042】
また、本発明の第二の態様のプログラムは、上記に記載の電子機器における制御手段としての機能をコンピュータに実現させるためのプログラムであることを特徴とする。
【図面の簡単な説明】
【0043】
【図1】本発明の好適な一実施形態であるレーダー探知機の正面斜め上から見た斜視図である。
【図2】レーダー探知機の左側面図である。
【図3】レーダー探知機のブロック図である。
【図4】待ち受け画面の表示例を示す図である。
【図5】レーダースコープの表示例を示す図である。
【図6】GPS警報の表示例を示す図である。
【図7】レーダー波警報機能における警報画面の表示例を示す図である。
【図8】トンネル内速度測定装置警報画面(2km)の表示例を示す図である。
【図9】トンネル内速度測定装置警報画面(1km)の表示例を示す図である。
【図10】トンネル内速度測定装置警報画面(500m)の表示例を示す図である。
【図11】トンネル内速度測定装置への接近警告を行なう場合の誘導点等の設定状況を示す図である。
【図12】現在位置推定処理の流れを示すフローチャートである。
【図13】三軸加速度センサによる判定処理のフローチャートである。
【発明を実施するための形態】
【0044】
以下、本発明の電子機器の一実施形態であるレーダー探知機1について図面を参照して説明する。図1及び図2に示すレーダー探知機1は、周知のように、速度違反取締用のマイクロ波レーダーの電波を受信して警告を発したり、ループコイル式速度違反取締機等の電波を出さない速度違反取締機の位置をGPS衛星からの電波を受信して警告を発する。また、レーダー探知機1は、通常自動車のダッシュボード上に取り付けられる。
【0045】
レーダー探知機1は、図1に示すように、ケース本体11の上面にソーラーパネル2並びにスイッチ部3を配置し、ケース本体11の前面側(車両前方へ配置される側(フロントガラス側))内部に速度測定装置の発する周波数帯のマイクロ波を検知するマイクロ波受信器4を配置し、ケース本体11の後面側(車両後方へ配置される側(ユーザ側))に表示部5と警報ランプ6と赤外線通信機7とリモコン受信器16を配置している。また、ケース本体11の上面側内部には、GPS受信器8を配置する。さらに、ケース本体11の左側面には、アダプタージャック9(図2参照)を配置し、他方の側面には電源スイッチ10並びに図示外のDCジャックを配置する。また、ケース本体11内には、スピーカ20(図3参照)も内蔵している。本実施形態では、表示部5は2.4インチの小型液晶ディスプレイであり、表示部5を実装するケース本体11の後方側の高さHは、その他の部位の高さH0よりも大きくしている。
【0046】
次に、図3を参照して、レーダー探知機1の電気的構成を説明する。レーダー探知機1には、主制御を行う制御部18が設けられ、制御部18は、CPU31、EEPROM32、RAM33等から構成されている。また、制御部18には、GPS衛星からの電波を受信するGPS受信機(GPSモジュール)8、速度計測用のレーダーからのマイクロ波を受信するマイクロ波受信器(マイクロ波受信モジュール)4、交通取り締まりの連絡用のUHF帯の無線電波を受信する警察無線受信機(無線受信モジュール)15、振動を検出して、レーダー探知機1が取り付けられた自動車の停止・移動を検出する三軸加速度センサ21、レーダー探知機1を操作するためのリモコン17からの赤外線を受信するリモコン受信機16、各種の情報や警告画面を表示するカラー液晶から構成された表示部5、点滅又は点灯して報知を行うランプ6、警告の音声を発するスピーカ20、速度違反取締機が設置されている最新の位置情報を記憶したメモリカード14が挿入されるメモリカードリーダ13、携帯電話と赤外線通信を行う赤外線通信機7、及びメモリカード14から読み込んだ速度違反取締機が設置されている最新の位置情報等の各種データ等を記憶するデータベース19(以下、「DB19」とも言う。)が接続されている。
【0047】
図3に示すように、赤外線通信機7は携帯電話機12等の赤外線通信機を内蔵した通信装置との間でデータの送受を行なう。アダプタージャック9は、メモリカードリーダ13を接続する端子である。アダプタージャック9にメモリカードリーダ13を接続することで、そのメモリカードリーダ13に装着されたメモリカード14に格納されたデータを内部に取り込むことができる。より具体的には、メモリカード14に格納されたデータは、新規な目的物の情報(経度・緯度を含む位置情報,種別情報等)などの更新情報があり、その更新情報が制御部18経由で装置に内蔵されるデータベース19に格納(ダウンロード)され、データ更新がされる。なお、メモリカードリーダ13の機能は、ケース本体11内に内蔵するように構成してもよい。
【0048】
データベース19は、制御部18のマイコン内あるいはマイコンに外付けした不揮発性メモリ(たとえばEEPROM)である。データベース19には、出荷時に一定の目的物に関する情報を登録しており、その後に追加された目的物についてのデータ等が上記のようにしてデータ更新することができる。また、データ更新は、赤外線通信機7を介して行なうこともできる。
【0049】
ケース本体11には、図示外のDCジャックが設けられており、図示外のシガープラグコードが接続され、そのシガープラグコードを介して車両のシガーソケットに接続して電源供給を受ける。無線受信器15は、飛来する所定周波数の無線を受信する。リモコン受信器16は、赤外線によりリモコン(携帯機:子機)17とデータ通信をし、装置に対する各種の設定を行なう。また、スイッチ部3も制御部18に接続され(図示省略)、リモコン17と同様の設定を行えるようになっている。リモコン17には、待受切替ボタン、詳細切替ボタン、履歴表示ボタン、キャンセルボタン、決定ボタンと、上下左右の十字ボタンを備えている。
【0050】
また、制御部18は、上記の各種の入力機器(GPS受信器8、マイクロ波受信器4、無線受信器15、リモコン受信器16、メモリカードリーダ13、赤外線通信機7)から入力される情報に基づき所定の処理を実行し、出力機器(表示部5,警報ランプ6,スピーカ20)を利用して所定の警報・メッセージを出力する。なお、これらの基本構成は、基本的に従来のものと同様のものを用いることができる。
【0051】
本実施形態のレーダー探知機1における機能は、制御部18に有するCPU(コンピュータ)が実行するプログラムとして制御部18のEEPROM32に格納され、これを制御部18に有するCPU(コンピュータ)が実行することで実現される。
【0052】
制御部18の有するプログラムによってコンピュータが実現する機能としては、待ち受け画面表示機能、レーダースコープ表示機能、GPS警報機能、レーダー波警報機能、無線警報機能、トンネル内速度測定装置警報機能などが挙げられる。
【0053】
待ち受け画面表示機能は、図4に示すように、GPS受信器8によって検出した自車両の速度、緯度、経度、高度を表示する機能である。レーダースコープ表示機能は、図5に示すように、GPS受信器8によって検出した現在位置から所定の範囲内(例えば約1kmの範囲内)にある目的物をデータベース19に記憶された位置情報に基づいて検索し、自車位置と目的物の位置との相対的な位置関係を表示部5に表示させる機能である。図5中の左側の「W」が西、右側の「E」が東、上側の「N」が北の方角を示し、「W」と「E」を結ぶ左右方向の線と「N」から下へ伸びる上下方向の線との交点にあるアイコンが自車位置を示している。また「L」「RD」「P」「N」等の文字を有するアイコンが目的物の種類と位置を示す。図4に示すような待ち受け画面表示機能実行中にリモコン17に設けた待受切替ボタンの押下が検出された場合、図5に示すようなレーダースコープ表示機能に切り替える。また、レーダースコープ表示機能実行中にリモコン17に設けた待受切替ボタンの押下が検出された場合、待ち受け画面表示機能に切り替える処理を行う。
【0054】
制御部18は、待ち受け画面表示機能またはレーダースコープ表示機能の実行中に、発生したイベントに応じて、GPS警報機能、レーダー波警報機能、無線警報機能、トンネル内速度測定装置警報機能等の各機能を実現する処理を実行する。
【0055】
GPS警報機能は、待ち受け画面表示機能またはレーダースコープ表示機能の実行中に、データベース19に記憶された目的物の緯度経度とGPS受信器8によって検出した現在位置の緯度経度から両者の距離を求め、求めた距離がデータベース19に記憶された接近警報距離になった場合に、データベース19に記憶された写真または模式図のデータを読み出して表示部5に表示させるとともに、データベース19に記憶された音声データを読み出してスピーカ20から接近警報音声を出力する接近報知を行なう機能である。
【0056】
こうした目的物としては、固定式速度測定装置(レーダーのようにレーダー波(マイクロ波)を発する速度測定装置やループコイルのように、レーダー波を発しない速度測定装置を含む)、制限速度切替りポイント、取締エリア、検問エリア、駐禁監視エリア、Nシステム、交通監視システム、交差点監視ポイント、信号無視抑止システム、警察署、事故多発エリア、車上狙い多発エリア、急/連続カーブ(高速道)、分岐/合流ポイント(高速道)、ETCレーン事前案内(高速道)、サービスエリア(高速道)、パーキングエリア(高速道)、パーキングエリア(高速道)、ハイウェイオアシス(高速道)、スマートインターチェンジ(高速道)、PA/SA内 ガソリンスタンド(高速道)、トンネル(高速道)、ハイウェイラジオ受信エリア(高速道)、県境告知、道の駅、ビューポイントパーキング等があり、これらの目的物の位置を示す緯度経度情報と目的物の種別情報と表示部5に表示する模式図または写真のデータとスピーカ20から出力する音声の音声データとを対応付けてデータベース19に記憶している。
【0057】
例えば、図4の待ち受け画面表示機能または図5のレーダースコープ機能の実行中に、目的物であるループコイルと自車との距離がデータベース19に記憶された接近警告距離である2km、1km、500mのいずれかになった場合には、目的物であるループコイルの模式図または写真のデータをデータベース19から読み出して表示部5に表示させるとともに、データベース19に記憶された音声データを読み出してスピーカ20から警報音声を出力する接近報知を行なう。例えば、500mに接近した場合には、図6のように、画面右側に図5と同様のレーダースコープ画面を表示して目的物であるループコイルと自車位置との位置関係を表示するとともに、ループコイルを示す目的物であるループコイルの模式図または写真のデータをデータベース19から読み出して表示部5に表示させ、「500m先ループコイルです、スピード注意」という音声データをデータベース19から読み出してスピーカ20から出力させる。また、警報音声の出力中は、警報ランプ6を点燈させる。
【0058】
レーダー波警報機能は、マイクロ波受信器4によって速度測定装置(移動式レーダー等のレーダー波を発する速度測定装置)から発せられる周波数帯のマイクロ波に対応する信号が検出された場合に、表示部5に対して警報画面を表示するとともに、スピーカ20から警報音を出力する警報機能である。例えば、レーダーの発するマイクロ波の周波数帯のマイクロ波がマイクロ波受信器4によって検出された場合に、図7に示すように、データベース19に記憶されたレーダーの模式図または写真を表示部5に警報画面として表示するとともに、データベース19に記憶された音声データを読み出して「レーダーです。スピード注意」という音声をスピーカ20から出力する。音声出力中は、警報ランプ6を点燈させる。
【0059】
無線警報機能は、無線受信器15によって、緊急車両等の発する無線を受信した場合に、その走行等の妨げとならないよう、警報を発する機能である。無線警報機能においては、取締無線、カーロケ無線、デジタル無線、特小無線、署活系無線、警察電話、警察活動無線、レッカー無線、ヘリテレ無線、消防ヘリテレ無線、消防無線、救急無線、高速道路無線、警備無線等の周波数をスキャンし、スキャンした周波数で、無線を受信した場合には、データベース19に無線種別ごとに記憶されたその周波数に対応する無線を受信した旨の模式図を警報画面として表示部5に表示するとともに、データベース19に無線種別ごとに記憶された音声データを読み出して、スピーカ20からその無線の種別を示す警報音声を出力する。たとえば、取締無線を受信した場合には「取締無線です。スピード注意」のように音声を出力する。音声出力中は、警報ランプ6を点燈させる。
【0060】
本実施例のレーダー探知機1は、さらに、トンネル内速度測定装置警報機能を備える。この機能は、GPS受信器8によって、GPS電波が受信できず、現在位置や現在速度が取得できないトンネル内に設置された速度測定装置(ループコイルタイプなどの速度測定装置)の位置への接近警報を発する機能である。すなわち、待ち受け画面表示機能またはレーダースコープ表示機能の実行中に、データベース19に記憶されたトンネル内速度測定装置の緯度経度と現在位置推定処理によって求めた現在位置の緯度経度から両者の距離を求め、求めた距離がデータベース19に記憶された接近警報距離になった場合に、図10に示すように、データベース19に記憶された写真または模式図のデータを読み出して表示部5に表示させるとともに、データベース19に記憶された音声データを読み出してスピーカ20から接近警報音声を出力する接近報知(警報)を行なう機能である。この機能を実現するために制御部18は、現在位置推定処理及びトンネル内速度測定装置警報処理を行う。
【0061】
トンネル内や高架下等では、GPS受信器8によって、GPS電波が受信できず、現在位置や現在速度が取得できないため現在位置推定処理を行う。
【0062】
この現在位置推定処理及びトンネル内速度測定装置警報処理のために、データベース19には、トンネル内速度測定装置と、トンネル内速度測定装置の位置へ至るトンネル内の道路上位置に設けた誘導点の位置情報を記憶している。例えば、図11に示すように、点a(現在位置が取得できない状態となることが想定される位置)から点fに至る破線部分がトンネルでありこの部分の両端外側の実線部分がトンネル外である道路において、トンネル内速度測定装置(例えばループコイル式速度測定装置)eの位置(現在位置が取得できない箇所にある目的物の位置)の位置情報(緯度経度情報)と、トンネル内速度測定装置eの位置へ至るトンネル内の道路上位置に順に設けた誘導点b,c,dの位置情報(緯度経度情報)と、その道路が一般道であるか高速道であるかの道路種別情報とを対応付けてデータベース19に記憶しておく。最初の誘導点である誘導点bはトンネル進入前のGPS受信器8によって測位可能な位置から1km以内の位置に設定している(誘導点bから1kmの範囲を円Bで図示している)。誘導点bと誘導点c、誘導点cと誘導点dのように、ある誘導点から次の誘導点までの距離も1km以内に設定しており、かつ、ある誘導点から次の誘導点が1つに決定できる位置に各誘導点の位置を設定する。すなわち、すでに誘導に利用済みの誘導点を除いて1km以内には誘導点が1つになるように各誘導点の位置を設定する。図11では、誘導点cから1kmの範囲を円Cで、誘導点dから1kmの範囲を円Dで図示している。図11のように誘導点bの位置から1km以内には次の誘導点であるcのみを配置し、誘導点cの位置から1km以内には次の誘導点であるdのみを配置する(誘導点bの位置も誘導点cの位置から1km以内の位置であるがすでに誘導に利用済みであるので、次の誘導点の候補から除外し、結果、次の誘導点はdに定まる。)
【0063】
次に、現在位置推定処理について、図12のフローチャートを参照して説明する。まず、現在位置が誘導点から1km以内か否かを判定する(S10)。現在位置が誘導点から1km以内である場合(S10:YES)、S11へ移行する。一方、現在位置が誘導点から1km以内でない場合(S10:NO)、この判定(S10)を繰り返し実行する。
【0064】
S11では、誘導点から1km以内に現在位置が入る誘導点を現在の誘導点として設定し、GPS受信器8から取得した現在位置を制御部18内のRAM33上に設けたトンネル内現在位置記憶領域に記憶し、GPS受信器8から取得した現在速度を制御部18内のRAM33上に設けたトンネル内現在速度記憶領域に記憶し、制御部18のマイコン内のタイマTをリスタートする。なお、GPS受信器8から現在位置や現在速度が取得できない場合にはこれらの記憶処理とタイマTのリスタートは行わない。
【0065】
続くS12では、GPS受信器8から現在位置と現在速度が取得できない状態(この状態を非測位状態と称する)が5秒以上継続しているか否かを判定する。非測位状態が5秒以上継続している場合(S12:YES)、S13へ移行し、非測位状態が5秒以上継続していない場合には、S10へ戻る。非測位状態が5秒以上継続している場合(S12:YES)は、一般的に、GPS衛星からの電波をGPS受信器8で受信できない状態であり、トンネルの中や高架下や高層ビルの陰に入っている場合である。このような場合でも、自動車は所定速度で移動しているので現在位置や速度が分からなくなるが、レーダー探知機の機能を維持する必要がある。
【0066】
次いで、S13では、本発明のポイントである三軸加速度センサによる判定処理を行う(S13)。この判定処理は、具体的には、図13に示す三軸加速度センサによる判定処理のサブルーチンに基づいて行われる。図13を参照して、三軸加速度センサによる判定処理を説明する。まず、三軸加速度センサ21の出力(検出値)を取得する(S31)。ここでは、X軸、Y軸、Z軸の3つを取得する(S31)。次いで、三軸加速度センサ21の各軸毎に出力(検出値)の振幅を一定時間平均化する(S32)。具体的には、三軸加速度センサ21からの各軸毎に出力(検出値)の振幅を現時点から過去所定秒間(一例として、1秒間)において、一定時間間隔毎(一例として、40ms毎)に検出し、所定回数分(一例として25回分)平均化する(S32)。
【0067】
次いで、現在状態が停止状態で、S32で平均化した値が、X軸、Y軸、Z軸の何れか1つでも0.017G以上であれば(S33:YES)、現在は移動状態であると判定し、現在状態を移動状態に変更してRAM33に記憶し、直前状態を停止状態に変更してRAM33に記憶する(S34)。以降、RAM33に記憶された「現在状態」が「移動状態」であることを「現在移動」ともいい、RAM33に記憶された「現在状態」が「停止状態」であることを「現在停止」ともいう。また、RAM33に記憶された「直前状態」が「移動状態」であることを「直前移動」ともいい、RAM33に記憶された「直前状態」が「停止状態」であることを「直前停止」ともいう。なお、初めてS33を実行する際の現在状態と直前状態は移動状態に初期設定している。次いで、図12のフローチャートにリターンする。振動の検知をX軸、Y軸、Z軸の三軸で行っているのは、自動車の走り方により振動が出やすい軸が異なるからである。また、等速運動の場合には、Z軸に振動が出やすい。さらに、振動の検知をX軸、Y軸、Z軸の三軸で行えば、路面が平面でZ軸の振幅が取りにくい場合でも、加減速はX軸で、方向回転はY軸で検知できる。従って、最終的にどれかの軸で振幅が大きくなれば動いていると判定することができる。
【0068】
また、現在状態が移動状態で、S32で平均化した値が、X軸、Y軸、Z軸の全てが0.009G以下が3秒以上継続した場合は(S33=NO,S35:YES)、現在は停止状態であると判定し、現在状態を停止状態に変更してRAM33に記憶し、直前状態を移動状態に変更してRAM33に記憶する(S36)。次いで、図12のフローチャートにリターンする。また、S33:NO,S35:NOと判断された場合には、現在は直前の状態から変化なしと判定し、現在状態、直前状態のRAM33の記憶内容を変更する処理は行わず、現在状態、直前状態は変化させないままにする(S37)。次いで、図12のフローチャートにリターンする。尚、S35に規定の3秒は、必ずしもこの時間には限られず、例えば、1秒から5秒の間であれば、一回でも0.009G以下が検出されたことにより直ちに移動状態から停止状態になったとの誤判断がされることがない。また、S33の閾値0.017G及びS35の閾値0.009Gは一例であり、自動車の振動特性に合わせて適宜設定すればよい。
【0069】
また、S33の判断では、X軸、Y軸、Z軸の全てが同一の閾値0.017G以上であれば、現在は移動状態であると判定してもよい(S34)。また、S35の判断では、X軸、Y軸、Z軸の何れか1つでも閾値0.009G以下が3秒以上継続した場合は(S35:YES)、現在は停止状態であると判定してもよい(S36)。S33の閾値は、X軸、Y軸、Z軸の三軸共に同じ値の0.017Gを用いているが、特定の軸のみ他の軸より大きくしてもよい。また、S35の閾値は、X軸、Y軸、Z軸の三軸共に同じ値の0.009Gを用いているが、特定の軸のみ他の軸より大きくしてもよい。このようにすることにより、自動車の振動特性に合わせた閾値を設定して、より正確に判定することが可能になる。尚、上記の閾値は、カット&トライで自動車の振動特性に合うように設定すればよい。
【0070】
次いで、「直前移動」であり、三軸加速度センサによる判定処理(S13)の判定が「現在移動」の場合(S14:YES、)トンネル内現在位置記憶領域に記憶された現在位置(推定位置)から、現在の誘導点の方向へ向けて、S11でトンネル内現在速度記憶領域に記憶された現在速度(推定速度)にて走行しているものとして、タイマTの示す時間にこの現在速度を乗じて、トンネル内現在位置記憶領域に記憶された現在位置を更新する(S15)。そして、タイマTをリスタートする(S15)。
【0071】
また、「直前停止」であり、「現在移動」の場合(S14:NO,S21:YES)、0km/hから所定速度に加速する発進処理を行う(S22)。この発進処理では、一例として、現在の誘導点の位置情報に対応付けて記憶された道路種別情報が一般道であれば、0km/hから60km/hに速度を10秒かけてゆっくりUPさせる。ゆっくりUPさせる処理としては、この例でいえば、例えば、0km/hから60km/hに10秒かけてリニアにアップさせる処理と処理が簡便でよい。以下別の例でも同様である。DOWNさせる場合も同様である。また、現在の誘導点の位置情報に対応付けて記憶された道路種別情報が高速道であれば、0km/hから80km/hに速度を10秒かけてゆっくりUPさせる。次いで、トンネル内現在位置記憶領域に記憶された現在位置(推定位置)から、現在の誘導点の方向へ向けて、トンネル内現在速度記憶領域に記憶された現在速度(推定速度)にて走行しているものとして、タイマTの示す時間にこの一般道60km/h、高速道80km/hを乗じて、トンネル内現在位置記憶領域に記憶された現在位置を更新する(S23)。そして、タイマTをリスタートする(S23)。尚、10秒かけてゆっくりUPしているのは、通常の自動車では、停止状態から60km/hや80km/hに加速できるのは、10秒程度であるからである。また、この10秒は、必ずしもこの時間に限られず、自動車の加速性能を考慮して、適宜設定すればよい。
【0072】
また、「直前移動」であり、「現在停止」の場合(S21:NO,S24:YES)、停止処理を行う(S25)。この停止処理では、一例として、現在の誘導点の位置情報に対応付けて記憶された道路種別情報が一般道であれば、60km/hから0km/hに速度を2秒かけてDOWNさせる。また、現在の誘導点の位置情報に対応付けて記憶された道路種別情報が高速道であれば、80km/hから0km/hに速度を2秒かけてDOWNさせる。その後、S10に戻る。尚、停止処理(S25)の2秒は、必ずしもこの時間に限られず、例えば、1秒から5秒程度で有れば、自然な停止感が得られる。
【0073】
続くS16では、トンネル内現在位置記憶領域に記憶された現在位置が現在の誘導点の位置に到達したか否かを判定する。トンネル内現在位置記憶領域に記憶された現在位置が現在の誘導点の位置に到達した場合(S16:YES)、S17へ移行する。一方、トンネル内現在位置記憶領域に記憶された現在位置が現在の誘導点の位置に到達していない場合(S16:NO)、S10へ戻る。
【0074】
S17では、次の誘導点があるか否かを判定する。すなわち、未利用の誘導点であって、誘導点から1km以内に現在位置が入る誘導点があるか否かを判定する。このような誘導点がある場合(S17:YES)、S18へ移行する。一方このような誘導点がない場合(S17:NO)、S19へ移行する。
【0075】
S18では、未利用の誘導点であって、誘導点から1km以内に現在位置が入る誘導点を次の誘導点として設定し、S10へ移行する。
【0076】
S19では、現在位置から最も近いトンネル内速度測定装置の位置へ向けてトンネル内現在速度記憶領域に記憶された現在速度にて走行しているものとして、タイマTの示す時間にこの現在速度を乗じて、トンネル内現在位置記憶領域に記憶された現在位置を更新する。そして、タイマTをリスタートする。
【0077】
続くS20では、トンネル内現在位置記憶領域に記憶された現在位置が現在位置から最も近いトンネル内速度測定装置の位置に到達したか否かを判定する。トンネル内現在位置記憶領域に記憶された現在位置が現在位置から最も近いトンネル内速度測定装置の位置に到達した場合(S20:YES)、本処理を終了して、再度S10から処理を開始する。一方、トンネル内現在位置記憶領域に記憶された現在位置が現在位置から最も近いトンネル内速度測定装置の位置に到達していない場合(S20:NO)、S19へ戻る。
【0078】
以上のような現在位置推定処理によって求められる現在位置及び現在速度はトンネル内現在位置記憶領域及びトンネル内現在速度記憶領域それぞれ参照することで他の処理から取得することができる。
【0079】
制御部18は、マルチタスクにてトンネル内速度測定装置警報処理を行う。トンネル内速度測定装置警報処理は、トンネル内速度測定装置eとのこの現在位置の関係が2km、1km、500mになった際にそれぞれ接近警報を発する処理である。接近警報は、従来のGPS警報の処理と同様であるが、参照する現在位置は、トンネル内現在位置記憶領域に記憶された現在位置とする。例えば、図4の待ち受け画面表示機能または図5のレーダースコープ機能の実行中に、目的物であるトンネル内速度測定装置の位置と現在位置との距離がデータベース19に記憶された接近警告距離である2km、1km、500mのいずれかになった場合には、目的物であるトンネル内速度測定装置の模式図または写真のデータをデータベース19から読み出して表示部5に表示させるとともに、データベース19に記憶された音声データを読み出してスピーカ20から警報音声を出力する接近報知を行なう。例えば、2kmに接近した場合には、図8のように、画面右側に図5と同様のレーダースコープ画面を表示して目的物であるトンネル内速度測定装置と自車位置との位置関係を表示するとともに、トンネル内速度測定装置を示す目的物であるトンネル内速度測定装置の模式図または写真のデータをデータベース19から読み出して表示部5に表示させる。データベース19にはトンネル内速度測定装置の位置情報に関連付けて、当該トンネル内速度測定装置の設置箇所の制限速度に関する情報を記憶しておき、図8の画面内にある制限速度標識内にその制限速度を表示する(図8では80km/hが制限速度として記憶されている場合の表示例である)。同時に「2km先トンネル内速度測定装置です。制限速度は80km/hです。」という音声データをデータベース19から読み出してスピーカ20から出力させる。また、警報音声の出力中は、警報ランプ6を点燈させる。
【0080】
以上のような処理によれば、図11において、点oから点aへ向けて本車載機器を設置した車両が走行する場合、トンネル進入点aでGPS8は測位不能(非測位)になり、制御部18は、現在位置(緯度経度情報)と現在速度が取得不能となる。そこで、制御部18は、現在位置推定処理によって、測位可能であったトンネル進入点aの直前の現在位置から誘導点bに向けての直線上を、測位不能になる直前の速度(以下現在速度と称する)で進行しているものとして現在位置を更新していき、現在位置が誘導点bの位置に達したら、次の誘導点cに向けて、bcを結ぶ直線上で、同様に現在位置を更新していくこととなる。そして、現在位置が誘導点cの位置に達したら、次の誘導点dに向けて、cdを結ぶ直線上で、同様に現在位置を更新していく。そして次の誘導点がないため、現在位置から最も近いトンネル内速度測定装置eへ向けて、deを結ぶ直線上で、同様に現在位置を更新する。トンネル内速度測定装置eに現在位置が到達したら、現在位置の更新を停止する。そのまま車両が走行しつづけ、トンネル退出点fに至った場合、GPS受信器8から現在位置と現在速度が取得可能となる。
【0081】
制御部18は、マルチタスクにてトンネル内速度測定装置警報処理を行うので、トンネル内速度測定装置eとのこの現在位置の関係が2km、1km、500mになった際にそれぞれ接近警報が発せられる。図11には、トンネル内速度測定装置eの位置から2kmの箇所を円E1で、1kmの箇所を円E2で、500mの箇所を円E3で図示している。地点o、地点a、地点b、地点c、地点d、地点e、地点fの順に車両が走行する場合、まず、bcを結ぶ直線と円E1との交点で、図8に示すようなトンネル内速度測定装置まで2kmであることを示す警報画面が表示部5に表示され、「2km先トンネル内速度測定装置です。制限速度は80km/hです。」という警報音声がスピーカ20から報知される。次にdeを結ぶ直線と円E2との交点で、図9に示すようなトンネル内速度測定装置まで1kmであることを示す警報画面が表示部5に表示され、「1km先トンネル内速度測定装置です。制限速度は80km/hです。」という警報音声がスピーカ20から報知される。最後にdeを結ぶ直線と円E3との交点で、図10に示すようなトンネル内速度測定装置まで500kmであることを示す警報画面が表示部5に表示され、「500m先トンネル内速度測定装置です。制限速度は80km/hです。」という警報音声がスピーカ20から報知される。
【0082】
以上のように、本発明に係る電子機器によれば、位置情報や移動速度を取得できない状況であっても、三軸加速度センサ21を用いて振動を検出して、現在は、停止状態か移動状態かを判定するので、従来よりも的確に、目的物の設置位置に関する情報の報知を行なうことができる。
【0083】
なお、本発明の実施形態はこれに限らず各種の形態を採りうる。例えば、本実施例で説明した速度や距離の値などは、適宜の値をとることができる。
【0084】
また、たとえば、最初の誘導点や次の誘導点は、予め定めたほかのルールにそって決定するようにしてもよい。例えば、データベース19の誘導点の位置情報と関連付けて図11の矢印で示すような誘導点への許容進入方向に関する情報(例えば誘導点の位置から北方向を0度とした時計回りの角度情報など)を記憶し、現在位置推定処理の図12のS10やS18での誘導点の有無や決定の処理では、さらに、この許容進入方向に対して所定角度(例えばプラスマイナス30度)の範囲内にトンネル内現在位置記憶領域に記憶された現在位置がある場合にのみ、その誘導点を対象の誘導点として決定すると決定するとよい。このようにすれば、近接する場所に複数の誘導点があったとしても、許容進入方向を満たすものを誘導点として特定することができる。
【0085】
また、たとえば、速度測定装置の設置箇所の制限速度に関する情報の報知を行なった場合、制限速度を越える速度で走行している車両は、速度を落とす可能性が高い。すなわち、例えば、図8〜図10に示して説明したようにトンネル内速度測定装置の2km手前・1km手前・500m手前の3箇所で、接近警報を報知する構成の場合であって、データベース19に記憶されたトンネル内速度測定装置の設置箇所の制限速度が80km/hであり、トンネル内現在速度記憶領域に記憶された現在速度が120km/hであり、実際も120km/hを維持して走行している際に、データベース19に記憶されたトンネル内速度測定装置の設置箇所の制限速度が80km/hであることの1回目の報知(2km手前)を行なうと、ドライバは減速するはずである。したがって、この場合、例えば、100km/hに減速したものとしてトンネル内速度測定装置警報処理における1回目の報知(2km手前)後に、トンネル内現在速度記憶領域に記憶された現在速度をデータベース19に記憶された当該トンネル内速度測定装置の制限速度の20%増しの速度(この例では96km/h)へ補正する処理を行う。現在速度の補正処理をしないと500m手前での報知が、実際の500m手前よりも手前になってしまい、再度加速してしまうなどの問題が生じる可能性があるが、このようにすれば、誤差を小さくすることができ、適切な警報を行なうことができる。したがって、より的確に、目的物の設置位置に関する情報の報知を行なうことができる。なお、S11で記憶された現在速度が当該トンネル内速度測定装置の設置箇所の制限速度を越える関係にある場合に、この補正を行うようにするとよく、S11で記憶された現在速度が当該トンネル内速度測定装置の設置箇所の制限速度を越えない場合には補正は行わなくてもよい。また例えばデータベース19の当該制限速度切替りポイントに、切り替る制限速度の値を関連付けて記憶しておき、トンネル内現在位置記憶領域に記憶された現在位置が、データベース19の制限速度切替りポイントの位置に到達した場合にも、同様にして、この制限速度の値を用いて現在速度の補正を行うようにしてもよい。例えば、100km/hから80km/hへ切り替わるという情報を記録しておき、この割合分(80/100)を現在速度に乗じて新たな現在速度としてトンネル内現在速度記憶領域に記憶するなどして、現在速度を補正する(減速する)。
【0086】
また、上述した実施例では、GPS受信器8から取得した現在速度を制御部18内のRAM33に設けたトンネル内現在速度記憶領域に記憶してこの速度で走行しているものとして処理を行ったが、GPS受信器8によって速度が取得できなくなるトンネル進入直前の速度は、最も精度が低いデータと言える。また、道路に急カーブなどの箇所が含まれるとその点では走行速度が低くなる可能性が高い。そこで、現在位置が取得できない箇所と目的物の位置との間の標準速度をトンネル内現在速度記憶領域に記憶してこの速度で走行しているものとして処理を行うようにしてもよい。このようにすれば、目的物との接近関係の判定をより精度よく行うことができる。
【0087】
本実施例では、位置の取得はGPS受信器8で行うこととしたが、例えばビーコン、無線基地局情報等から送信される情報を受信する受信機とすることもできる。また例えば車速パルスを取得するセンサ等を用いることができる。しかし、両者を共用できるものを用いると特によくGPS受信器(GPSモジュール)8が特によい。
【0088】
また、目的物の位置へ推定速度で進行している旨を示す報知とは別にさらにGPS受信器8が測位状態にあるか非測位状態にあるかを示す報知を行うとよい。例えば、目的物の位置へ推定速度で進行している旨を示す報知を行うアイコン等の表示や音声出力とGPS受信器8が測位状態にあるか非測位状態にあるかを示す報知を行うアイコン等の表示や音声出力とを行うようにするとよい。このようにすれば、GPSの受信状態を知ることができるとともに、目的物の位置へ推定速度で進行しているものとして目的物との接近関係が報知される状態にあるのか否かが容易に理解できる。
【0089】
また本実施例では、現在位置が取得できない箇所にある目的物の例としてトンネル内速度測定装置の例を用いて説明したが、例えば図11のトンネル内速度測定装置eとした場所がトンネル出口直後の場所である場合ように、現在位置が取得しにくい箇所にある目的物としてもよい。すなわち現在位置が取得できない箇所にある目的物とは、現在位置が取得できない可能性のある箇所にある目的物を含むとよい。トンネル出口直後は、例えば、予め定めた基準距離以内とすることができる。また、現在位置が取得できない箇所にある目的物としては、トンネル内速度測定装置に限らず、各種の箇所にある目的物として適用できる。目的物(オブジェクト)は具体的に実在する物体としてもよいし、具体的に実在するものだけでなく、仮想的に存在するものを含むようにしてもよい。特に、電波によって現在位置を取得する構成の場合には現在位置が取得できない箇所として例えば電波状況の悪い箇所とし、目的物としては交通取締りや安全運転・エコ運転に関する情報を発すべき場所などとするとよい。
【0090】
また本実施例では、電子機器の一例として、レーダー探知機1を用いて説明したが、電子機器としては、レーダー探知機1に限られず、カーナビゲーションシステム、スマートフォン等に図12及び図13に示すプログラムを組み込んで、実施してもよい。
【符号の説明】
【0091】
1 レーダー探知機
2 ソーラーパネル
4 マイクロ波受信器
5 表示部
6 ランプ
7 赤外線通信機
8 GPS受信器
9 アダプタージャック
10 電源スイッチ
11 ケース本体
13 メモリカードリーダ
14 メモリカード
15 無線受信器
16 リモコン受信器
18 制御部
19 データベース
20 スピーカ
21 三軸加速度センサ
【特許請求の範囲】
【請求項1】
受信手段が受信した電波に基づいて、現在位置を取得するための位置取得手段と、
目的物の位置情報を記憶する記憶手段と、
前記位置取得手段によって取得した現在位置と前記記憶手段によって記憶された目的物の位置情報との接近関係に基づいて当該目的物の設置位置に関する情報の報知を報知手段から報知させる制御を行う制御手段とを備える電子機器において、
現在の移動速度を取得するための速度取得手段と、
当該電子機器の振動状態を検出する振動検出手段と、
当該振動検出手段の検出結果から当該電子機器が移動しているか否かを判定する移動判定手段とを備え、
前記記憶手段は、前記目的物の位置情報として現在位置が取得できない箇所にある目的物の位置情報を記憶し、
前記移動判定手段が当該電子機器が移動していないと判定した場合は、前記制御手段は、現在位置が取得できない箇所にある前記記憶手段に記憶された目的物の位置へ進行しておらず、現在位置に停止しているものとして前記記憶手段に記憶された現在位置が取得できない箇所にある目的物の位置へ接近関係を判定することを特徴とする電子機器。
【請求項2】
前記振動検出手段としては、三軸加速度センサを用い、
前記移動判定手段は、前記三軸加速度センサの各軸毎の検出値を当該電子機器が移動しているか否かを判定する所定の閾値と比較して判定し、
前記三軸加速度センサの各軸毎の検出値を判定する前記所定の閾値の内の少なくとも一つを他の二つと異ならせたことを特徴とする請求項1に記載の電子機器。
【請求項3】
前記振動検出手段としては、三軸加速度センサを用い、
前記移動判定手段は、前記三軸加速度センサの各軸毎の検出値を当該電子機器が移動しているか否かを判定する一つの閾値と比較して判定し、
前記三軸加速度センサの各軸毎の検出値のいずれか1つでも前記閾値を越えていたら、当該電子機器が移動していると判定することを特徴とする請求項1に記載の電子機器。
【請求項4】
前記制御手段は、前記位置取得手段によって現在位置が取得できない状態であり、かつ、前記速度取得手段によって現在の速度が取得できない状態である場合に、前記移動判定手段が前記電子機器が移動していると判定した場合は、現在の推定速度を決定し、前記記憶手段に記憶された現在位置が取得できない箇所にある目的物の位置へ前記推定速度で進行しているものとして当該目的物との前記接近関係を判定することを特徴とする請求項1〜3の何れかに記載の電子機器。
【請求項5】
前記記憶手段は、前記目的物の位置情報として現在位置が取得できない箇所と目的物の位置との間の標準速度を少なくとも1つ記憶しておき、
前記現在の推定速度の決定は、前記記憶手段に記憶された標準速度に基づいて行うことを特徴とする請求項4に記載の電子機器。
【請求項6】
前記現在の推定速度の決定は、前記速度取得手段によって取得できていた過去の速度状態に基づいて行うこと
を特徴とする請求項4に記載の電子機器。
【請求項7】
前記移動判定手段により前記電子機器が移動していないと判定されている状態で、前記振動検出手段からの検出値が所定の閾値以上となった場合に、前記移動判定手段は、前記電子機器が移動していると判定することを特徴とする請求項1〜6の何れかに記載の電子機器。
【請求項8】
前記移動判定手段により前記電子機器が移動していると判定されている状態で、前記振動検出手段からの検出値が所定の閾値以下の状態を所定秒間継続した場合に、前記移動判定手段は、前記電子機器が移動していないと判定することを特徴とする請求項1〜7の何れかに記載の電子機器。
【請求項9】
前記移動判定手段により前記電子機器が移動していないと判定されている状態で、前記振動検出手段からの検出値が所定の閾値以上に一回でもなった場合に、前記移動判定手段は、前記電子機器が移動していると判定し、
前記移動判定手段により前記電子機器が移動していると判定されている状態で、前記振動検出手段からの検出値が所定の閾値以下の状態を所定秒間継続した場合に、前記移動判定手段は、前記電子機器が移動していないと判定することを特徴とする請求項1〜8の何れかに記載の電子機器。
【請求項10】
前記振動検出手段からの検出値は、一定時間間隔毎に検出した値の所定時間内の平均値であることを特徴とする請求項1〜9の何れかに記載の電子機器。
【請求項11】
前記移動判定手段により前記電子機器が移動していないと判定されている状態から、前記移動判定手段により前記電子機器が移動していると判定された場合には、現在の推定速度は、第一の所定時間かけて停止速度から前記標準速度に上げることを特徴とする請求項5に記載の電子機器。
【請求項12】
前記移動判定手段により前記電子機器が移動していると判定されている状態から、前記移動判定手段により前記電子機器が移動していないと判定された場合には、現在の推定速度は、前記第一の所定時間より短い第二の所定時間かけて前記標準速度から停止速度に下げることを特徴とする請求項11に記載の電子機器。
【請求項13】
前記第二の所定時間は、前記移動判定手段により前記電子機器が移動していると判定されている状態で、前記振動検出手段からの検出値が所定の閾値以下の状態を所定秒間継続した場合に、前記移動判定手段は、前記電子機器が移動していないと判定するために使用する当該所定秒間より長い時間であることを特徴とする請求項12に記載の電子機器。
【請求項14】
前記第二の所定時間は1秒から5秒の間であり、前記所定秒間は1秒から5秒の間であることを特徴とする請求項13に記載の電子機器。
【請求項15】
前記位置取得手段及び前記速度取得手段は、GPSモジュールであること
を特徴とする請求項1〜14のいずれかに記載の電子機器。
【請求項16】
前記記憶手段は、現在位置が取得できない箇所にある目的物としてトンネル内の速度測定装置の位置情報を記憶し、
前記報知手段からの報知はトンネル内速度測定装置への接近警告とすること
を特徴とする請求項1〜15のいずれかに記載の電子機器。
【請求項17】
前記制御手段は、前記目的物の位置へ前記推定速度で進行している旨を示す報知をさせる制御を行うこと
を特徴とする請求項1〜16のいずれかに記載の電子機器。
【請求項18】
請求項1〜17のいずれかに記載の電子機器における制御手段としての機能をコンピュータに実現させるためのプログラム。
【請求項1】
受信手段が受信した電波に基づいて、現在位置を取得するための位置取得手段と、
目的物の位置情報を記憶する記憶手段と、
前記位置取得手段によって取得した現在位置と前記記憶手段によって記憶された目的物の位置情報との接近関係に基づいて当該目的物の設置位置に関する情報の報知を報知手段から報知させる制御を行う制御手段とを備える電子機器において、
現在の移動速度を取得するための速度取得手段と、
当該電子機器の振動状態を検出する振動検出手段と、
当該振動検出手段の検出結果から当該電子機器が移動しているか否かを判定する移動判定手段とを備え、
前記記憶手段は、前記目的物の位置情報として現在位置が取得できない箇所にある目的物の位置情報を記憶し、
前記移動判定手段が当該電子機器が移動していないと判定した場合は、前記制御手段は、現在位置が取得できない箇所にある前記記憶手段に記憶された目的物の位置へ進行しておらず、現在位置に停止しているものとして前記記憶手段に記憶された現在位置が取得できない箇所にある目的物の位置へ接近関係を判定することを特徴とする電子機器。
【請求項2】
前記振動検出手段としては、三軸加速度センサを用い、
前記移動判定手段は、前記三軸加速度センサの各軸毎の検出値を当該電子機器が移動しているか否かを判定する所定の閾値と比較して判定し、
前記三軸加速度センサの各軸毎の検出値を判定する前記所定の閾値の内の少なくとも一つを他の二つと異ならせたことを特徴とする請求項1に記載の電子機器。
【請求項3】
前記振動検出手段としては、三軸加速度センサを用い、
前記移動判定手段は、前記三軸加速度センサの各軸毎の検出値を当該電子機器が移動しているか否かを判定する一つの閾値と比較して判定し、
前記三軸加速度センサの各軸毎の検出値のいずれか1つでも前記閾値を越えていたら、当該電子機器が移動していると判定することを特徴とする請求項1に記載の電子機器。
【請求項4】
前記制御手段は、前記位置取得手段によって現在位置が取得できない状態であり、かつ、前記速度取得手段によって現在の速度が取得できない状態である場合に、前記移動判定手段が前記電子機器が移動していると判定した場合は、現在の推定速度を決定し、前記記憶手段に記憶された現在位置が取得できない箇所にある目的物の位置へ前記推定速度で進行しているものとして当該目的物との前記接近関係を判定することを特徴とする請求項1〜3の何れかに記載の電子機器。
【請求項5】
前記記憶手段は、前記目的物の位置情報として現在位置が取得できない箇所と目的物の位置との間の標準速度を少なくとも1つ記憶しておき、
前記現在の推定速度の決定は、前記記憶手段に記憶された標準速度に基づいて行うことを特徴とする請求項4に記載の電子機器。
【請求項6】
前記現在の推定速度の決定は、前記速度取得手段によって取得できていた過去の速度状態に基づいて行うこと
を特徴とする請求項4に記載の電子機器。
【請求項7】
前記移動判定手段により前記電子機器が移動していないと判定されている状態で、前記振動検出手段からの検出値が所定の閾値以上となった場合に、前記移動判定手段は、前記電子機器が移動していると判定することを特徴とする請求項1〜6の何れかに記載の電子機器。
【請求項8】
前記移動判定手段により前記電子機器が移動していると判定されている状態で、前記振動検出手段からの検出値が所定の閾値以下の状態を所定秒間継続した場合に、前記移動判定手段は、前記電子機器が移動していないと判定することを特徴とする請求項1〜7の何れかに記載の電子機器。
【請求項9】
前記移動判定手段により前記電子機器が移動していないと判定されている状態で、前記振動検出手段からの検出値が所定の閾値以上に一回でもなった場合に、前記移動判定手段は、前記電子機器が移動していると判定し、
前記移動判定手段により前記電子機器が移動していると判定されている状態で、前記振動検出手段からの検出値が所定の閾値以下の状態を所定秒間継続した場合に、前記移動判定手段は、前記電子機器が移動していないと判定することを特徴とする請求項1〜8の何れかに記載の電子機器。
【請求項10】
前記振動検出手段からの検出値は、一定時間間隔毎に検出した値の所定時間内の平均値であることを特徴とする請求項1〜9の何れかに記載の電子機器。
【請求項11】
前記移動判定手段により前記電子機器が移動していないと判定されている状態から、前記移動判定手段により前記電子機器が移動していると判定された場合には、現在の推定速度は、第一の所定時間かけて停止速度から前記標準速度に上げることを特徴とする請求項5に記載の電子機器。
【請求項12】
前記移動判定手段により前記電子機器が移動していると判定されている状態から、前記移動判定手段により前記電子機器が移動していないと判定された場合には、現在の推定速度は、前記第一の所定時間より短い第二の所定時間かけて前記標準速度から停止速度に下げることを特徴とする請求項11に記載の電子機器。
【請求項13】
前記第二の所定時間は、前記移動判定手段により前記電子機器が移動していると判定されている状態で、前記振動検出手段からの検出値が所定の閾値以下の状態を所定秒間継続した場合に、前記移動判定手段は、前記電子機器が移動していないと判定するために使用する当該所定秒間より長い時間であることを特徴とする請求項12に記載の電子機器。
【請求項14】
前記第二の所定時間は1秒から5秒の間であり、前記所定秒間は1秒から5秒の間であることを特徴とする請求項13に記載の電子機器。
【請求項15】
前記位置取得手段及び前記速度取得手段は、GPSモジュールであること
を特徴とする請求項1〜14のいずれかに記載の電子機器。
【請求項16】
前記記憶手段は、現在位置が取得できない箇所にある目的物としてトンネル内の速度測定装置の位置情報を記憶し、
前記報知手段からの報知はトンネル内速度測定装置への接近警告とすること
を特徴とする請求項1〜15のいずれかに記載の電子機器。
【請求項17】
前記制御手段は、前記目的物の位置へ前記推定速度で進行している旨を示す報知をさせる制御を行うこと
を特徴とする請求項1〜16のいずれかに記載の電子機器。
【請求項18】
請求項1〜17のいずれかに記載の電子機器における制御手段としての機能をコンピュータに実現させるためのプログラム。
【図1】



【図2】

【図3】

【図4】
【図5】

【図6】
【図7】
【図8】
【図9】

【図10】
【図11】

【図12】
【図13】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【公開番号】特開2012−251941(P2012−251941A)
【公開日】平成24年12月20日(2012.12.20)
【国際特許分類】
【出願番号】特願2011−126505(P2011−126505)
【出願日】平成23年6月6日(2011.6.6)
【出願人】(391001848)株式会社ユピテル (238)
【Fターム(参考)】
【公開日】平成24年12月20日(2012.12.20)
【国際特許分類】
【出願日】平成23年6月6日(2011.6.6)
【出願人】(391001848)株式会社ユピテル (238)
【Fターム(参考)】
[ Back to top ]