
電子機器及び機械翻訳方法
【課題】 機器の傾きの変化しない提示動作を検出し翻訳に利用することができる技術を提供する。
【解決手段】 文章を入力する入力装置と、翻訳結果を表示する表示装置と、前記文章の第1言語から第2言語への翻訳を行う第1翻訳部と、前記文章の前記第2言語から前記第1言語への翻訳を行う第2翻訳部と、物理量を測定するセンサと、前記センサの測定値を記憶する測定値記憶部と、前記センサの測定値を累積(積分)し、移動量を得る移動量累積部と、現在の前記センサの測定結果および前記移動量累積部で算出した移動量と前記測定値記憶部の記憶した前記センサの測定結果の差をもとに外部から与えられた提示動作の発生を検知する提示動作判定部と、前記提示動作判定部の出力である提示動作の発生または中止によって前記入力装置、前記表示装置の言語と前記第1翻訳部と前記第2翻訳部を切り替える制御部とを備える電子機器。
【解決手段】 文章を入力する入力装置と、翻訳結果を表示する表示装置と、前記文章の第1言語から第2言語への翻訳を行う第1翻訳部と、前記文章の前記第2言語から前記第1言語への翻訳を行う第2翻訳部と、物理量を測定するセンサと、前記センサの測定値を記憶する測定値記憶部と、前記センサの測定値を累積(積分)し、移動量を得る移動量累積部と、現在の前記センサの測定結果および前記移動量累積部で算出した移動量と前記測定値記憶部の記憶した前記センサの測定結果の差をもとに外部から与えられた提示動作の発生を検知する提示動作判定部と、前記提示動作判定部の出力である提示動作の発生または中止によって前記入力装置、前記表示装置の言語と前記第1翻訳部と前記第2翻訳部を切り替える制御部とを備える電子機器。
【発明の詳細な説明】
【技術分野】
【0001】
本発明の実施形態は、電子機器及び機械翻訳方法に関する。
【背景技術】
【0002】
いわゆる機械翻訳端末などの電子機器が用いられている。例えば、センサとしては加速度センサを含み、実施例には日本語から外国語に翻訳する辞書を有するものがある(例えば、特許文献1参照。)。
【0003】
そこでは加速度センサによる傾きを検出し翻訳を行っているが、その場合は端末の天地を逆転させる提示動作しか検出することができない。即ち端末を移動した場合は端末の傾きが変化しないため使用できないという問題があった。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2010−33414号公報(第1図、段落0018)
【発明の概要】
【発明が解決しようとする課題】
【0005】
本発明の実施の形態は、機器の傾きの変化しない提示動作を検出し翻訳に利用することができる技術を提供することを目的とする。
【課題を解決するための手段】
【0006】
上記課題を解決するために、実施形態によれば電子機器は、文章を入力する入力装置と、翻訳結果を表示する表示装置と、前記文章の第1言語から第2言語への翻訳を行う第1翻訳部と、前記文章の前記第2言語から前記第1言語への翻訳を行う第2翻訳部と、物理量を測定するセンサと、前記センサの測定値を記憶する測定値記憶部と、前記センサの測定値を累積(積分)し、移動量を得る移動量累積部と、現在の前記センサの測定結果および前記移動量累積部で算出した移動量と前記測定値記憶部の記憶した前記センサの測定結果の差をもとに外部から与えられた提示動作の発生を検知する提示動作判定部と、前記提示動作判定部の出力である提示動作の発生または中止によって前記入力装置、前記表示装置の言語と前記第1翻訳部と前記第2翻訳部を切り替える制御部とを備える。
【図面の簡単な説明】
【0007】
【図1】実施形態にかかる電子機器の外観を模式的に示す図。
【図2】実施形態にかかる電子機器のハードウェア構成の一例を示すブロック構成図。
【図3】この発明の一実施形態を示す機能システム図。
【図4】同実施形態の端末提示動作を説明するために示す図。
【図5】同実施形態に用いられる表示装置の画面構成、端末提示動作中の画面構成例を示す図。
【図6】同実施形態の提示動作判定部のフローチャート。
【図7】同他の形態に用いられる制御部のフローチャート。
【発明を実施するための形態】
【0008】
以下、添付図面を参照して実施形態にかかる電子機器及び制御(機械翻訳)方法を説明する。なお、以下の実施形態では、PDAや携帯電話等、ユーザが把持して使用する電子機器を例に説明する。
【0009】
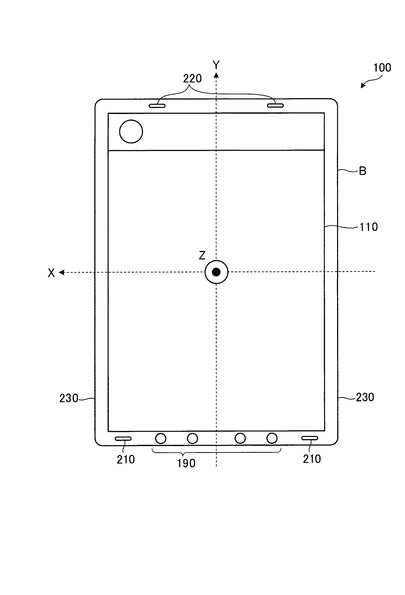
図1は、実施形態にかかる電子機器100の外観を模式的に示す図である。電子機器100は、表示画面を備えた情報処理装置であり、例えばスレート端末(タブレット端末)や電子書籍リーダ、デジタルフォトフレーム等として実現されている。なお、ここでは、X軸、Y軸、Z軸の矢印方向(Z軸では図の正面方向)を正方向としている(以下同様)。図3以下では、この電子機器100を機械翻訳端末として機能される例を後述する。
【0010】
電子機器100は、薄い箱状の筐体Bを備え、この筐体Bの上面に表示部110が配置されている。表示部110は、ユーザによってタッチされた表示画面上の位置を検知するタッチパネル(図2、タッチパネル111参照)を備えている。また、筐体Bの正面下部にはユーザが各種操作を行う操作スイッチ等である操作スイッチ190、ユーザの音声を取得するためのマイク210が配置されている。また、筐体Bの正面上部には音声出力を行うためのスピーカ220が配置されている。また、筐体Bの縁には、地磁気を検知する地磁気センサ230が配置されている。なお、図示例ではX軸方向の左右の縁に地磁気センサ230を備える構成を例示したが、Y軸方向の上下の縁に地磁気センサ230を備えてもよい。なお、2箇所に地磁気センサを備えているのは、近くに磁性体などがあった場合にセンサ出力の差分をとるなどしてその影響を捨象するためである。
【0011】
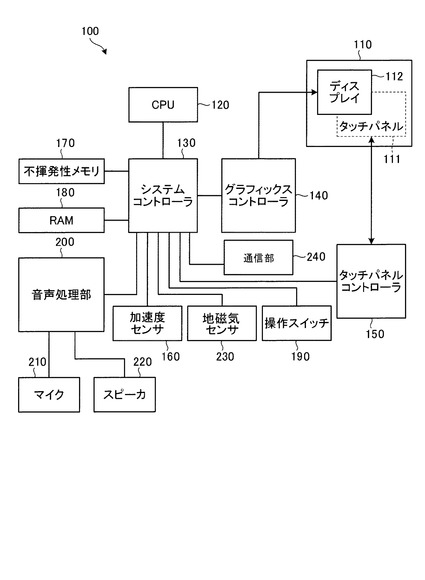
図2は、実施形態にかかる電子機器100のハードウェア構成の一例を示すブロック図である。図2に示すように、電子機器100は、上述の構成に加え、CPU120、システムコントローラ130、グラフィックスコントローラ140、タッチパネルコントローラ150、加速度センサ160、不揮発性メモリ170、RAM180、音声処理部200、通信部240等を備えている。また音声処理部200には内蔵または外付けのマイク210とスピーカ220とが接続されている。
【0012】
表示部110は、タッチパネル111と、LCD(Liquid Crystal Display)や有機EL(Electro Luminescence)等のディスプレイ112とから構成されている。タッチパネル111は、例えばディスプレイ112の表示画面上に配置された当面の座標検出装置から構成されている。タッチパネル111は、例えば筐体Bを把持したユーザの指によってタッチされた表示画面上の位置(タッチ位置)を検知することができる。このタッチパネル111の働きにより、ディスプレイ112の表示画面はいわゆるタッチスクリーンとして機能する。
【0013】
CPU120は、電子機器100の動作を中央制御するプロセッサであり、システムコントローラ130を介して電子機器100の各部を制御する。CPU120は、不揮発性メモリ170からRAM180にロードされる、オペレーティングシステム、各種アプリケーションプログラムを実行することで、後述する各機能部(図3など参照)を実現する。RAM180は、電子機器100のメインメモリとして、CPU120がプログラムを実行する際の作業領域を提供する。
【0014】
システムコントローラ130には、不揮発性メモリ170及びRAM180をアクセス制御するメモリコントローラも内蔵されている。また、システムコントローラ130は、グラフィックスコントローラ140との通信を実行する機能も有している。また、システムコントローラ130は、通信部240、インターネット等を介して図示せぬ外部のサーバへ音声波形等の音声信号を送信しこの音声波形に対する音声認識の結果を必要によっては受信する機能も有している。
【0015】
グラフィックスコントローラ140は、電子機器100のディスプレイモニタとして使用されるディスプレイ112を制御する表示コントローラである。タッチパネルコントローラ150は、タッチパネル111を制御し、ユーザによってタッチされたディスプレイ112の表示画面上のタッチ位置を示す座標データをタッチパネル111から取得する。
【0016】
加速度センサ160は、図1に示す3軸方向(X、Y、Z方向)や、これに各軸周りの回転方向の検出を加えた6軸方向の加速度センサ等であって、電子機器100に対する外部からの加速度の向きと大きさを検出し、CPU120に出力する。具体的に、加速度センサ160は、加速度を検出した軸、向き(回転の場合、回転角度)、及び大きさを含んだ加速度検出信号(傾き情報)をCPU120に出力する。なおここでは、角速度(回転角度)検出のためのジャイロセンサを、広義の加速度センサとして加速度センサ160に統合する形態としている。
【0017】
音声処理部200は、マイク210より入力される音声信号に、デジタル変換、ノイズ除去、エコーキャンセル等の音声処理を施してCPU120へ出力する。また、音声処理部200は、CPU120の制御のもとで、音声合成等の音声処理を施して生成した音声信号をスピーカ220へ出力し、スピーカ220による音声報知を行う。この音声処理部200に、後述のユーザ-マイク間距離検出部16がある。この中の音声処理部200の詳細について次に説明する。
【0018】
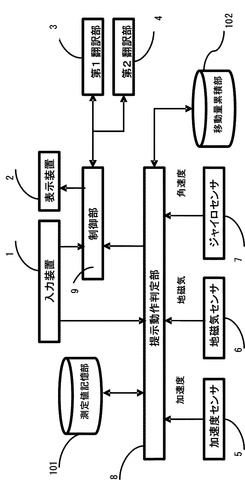
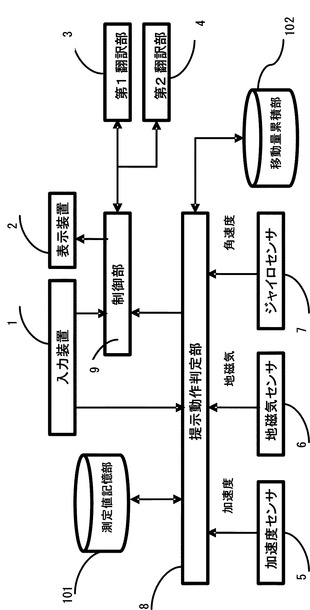
さて図3は本実施形態の機能構成である。ユーザからの入力を受け付ける入力装置1と、翻訳結果を表示する表示装置2と、文章を第1言語から第2言語へ翻訳する第1翻訳部3と、逆に文章を第2言語から第1言語へ翻訳する第2翻訳部4とに加え、加速度を取得する加速度センサ5,地磁気を取得する地磁気センサ6,角速度を取得するジャイロセンサ7と、角速度を累積(積分)し移動量を得る移動量累積部102と、過去のセンサの測定値を記憶する測定値記憶部101と、前記センサの測定値と移動量累積部102、測定値記憶部101の情報から端末の提示動作が発生したかどうかを判定する提示動作判定部8と、提示動作が発生したときの通知を受け取り、翻訳処理を実行し表示装置2に表示する制御部9とを備える機械翻訳端末である。
【0019】
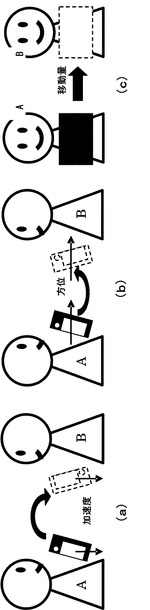
図4に本実施形態の想定する端末の提示動作を示す。2人のユーザが1台の機械翻訳端末を共有し、互いに対向(図4(a)、(b))、または横に並んでいる(図4(c))状態で使用する。ユーザAは端末の所有者であり、日本語の話者、ユーザBは英語の話者とする。
【0020】
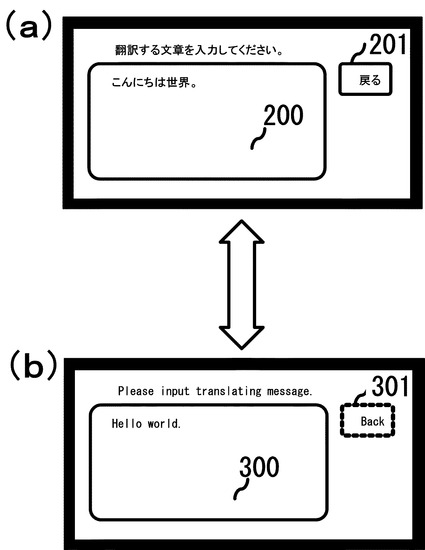
図5はユーザAが端末を持っているときに表示装置2に表示する画面(初期画面)である。図5(a)の画面は日本語で構成されており、入力装置1を使って日本語文章の入力が可能な入力部200と、翻訳機能を終了し別の画面へと遷移するためのボタン201を備える。ユーザAは図4のいずれかの形で端末をユーザBに提示すると翻訳端末は提示動作中であることを判別し、入力部200に入力した文章を第1翻訳部3を使用して英語に翻訳し、画面を図5(b)に切り替える。
【0021】
この図5(b)はユーザAがユーザBに端末を提示しているときに表示装置2に表示する画面である。画面は英語で構成されており、入力装置1を使って英語文章の入力が可能な入力部300と、翻訳機能を終了し別の画面へと遷移するためのボタン301を備える。ボタン301はボタン201と同様、別の画面へと遷移するための機能を持つボタンであるが、ユーザBは端末の所有者ではないので、制御部9によって無効化されている。
【0022】
画面が図5(b)に切り替わったとき、入力部300には入力部200に入力された日本語の英語への翻訳結果が表示される。この状態でユーザBは英語の文章を入力することが可能である。ユーザAが端末の提示をやめ、端末を元の姿勢に戻すと、画面は図5(a)に戻る。このとき、入力部200にはユーザBが入力部300に入力した英語文章を第2翻訳部4を使用して日本語に翻訳した結果が表示される。
【0023】
戻って図4は相手への端末の提示動作を表す。図4(a)は端末のピッチ角を回転し提示を行った場合である。この場合、提示後に端末向きの天地が逆転し、重力加速度の向きが180度変化するので、先行技術と同様、加速度センサだけで提示動作の発生を検出することが可能である。
【0024】
一方、図4(b)のように端末のヨー角を回転し提示を行った場合は、端末に対する重力加速度の向きが変化しないため、加速度センサだけでは提示動作の発生を検出することはできない。しかしこの場合、端末の向きが変化しているため、加速度センサと地磁気センサの測定値によって端末の向き(方位)を取得し、その変化によって提示動作を検出することが可能である。この手法は図2の動作の検出でも使用することができる。
【0025】
図4(c)はユーザが横に並んだ場合の提示動作である。ユーザAが横にいるユーザBに端末を提示する場合、端末の横方向への並行移動とヨー角方向の回転のいずれか、または両方が発生する。この場合、センサ測定値の累積によって移動量を計算することで提示の検出が可能である。
【0026】
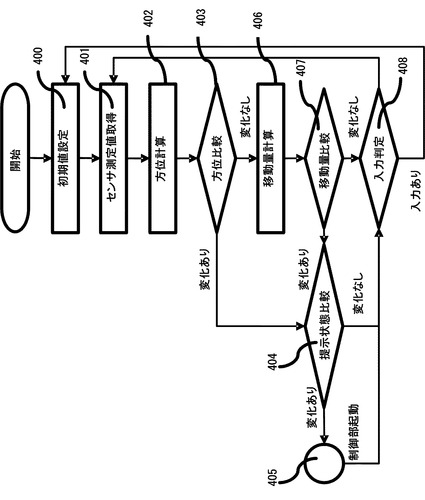
以上の原理を元にした提示動作判定部8のフローチャートを図6に示す。処理が開始すると、ステップ初期値設定400は現在の方位と移動量を原点として測定値記憶部101に記憶する。
【0027】
次に、センサ測定値取得401は、加速度センサ5,地磁気センサ6,ジャイロセンサ7からそれぞれ加速度、地磁気、角速度の値を取得する。方位計算402は、前記加速度および地磁気から端末の方位を計算する。
【0028】
方位比較403は、測定値記憶部101に記憶された方位と最新の方位を比較し、変化が認められる場合は提示動作中であるとして提示状態比較404へ、変化が認められない場合は移動量計算406へ進む。
【0029】
提示状態比較404は、提示動作の判定結果が前回の判定結果から切り替わったことを検知すると、制御部起動405へ進む。制御部起動405については後述する制御部9のフローチャート図7で説明する。提示動作の判定結果が変化していない場合は入力判定408へ進む。
【0030】
次に、移動量計算406について説明する。移動量計算406は、センサ測定値取得401で取得した加速度および角速度の値を移動量累積部102に入力し累積処理(積分)を行うことで移動量を計算する。
【0031】
移動量比較407は、測定値記憶部101に記憶された移動量と最新の移動量を比較し、変化が認められる場合は提示動作中であるとして提示状態比較404へ、変化がない場合は入力判定408へ進む。
【0032】
入力判定は408は入力装置1の入力が発生したかどうかを判定し、発生した場合は初期値設定400に進み原点をリセット、発生していない場合はセンサ測定値取得401に戻り処理を繰り返す。
【0033】
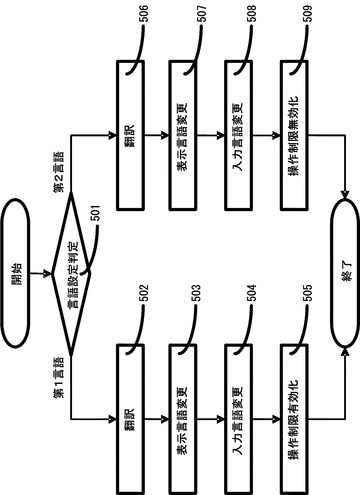
次に、制御部9のフローチャートを図7に示す。処理は図6のステップ制御部起動405によって開始する。ステップ言語設定判定501では、現在表示中の言語を元に以降の処理を切り分ける。第1言語(所有者の使用言語)が表示中の場合、翻訳502で第1翻訳部3を使用して入力部200に新たに入力された文章の第1言語から第2言語への翻訳を行い、表示言語変更503で表示装置2の画面を第2言語に切り替え、翻訳結果を入力部300に表示する。入力言語変更504では入力装置1(ソフトウェアキーボード等)の入力言語を第2言語に切り替え、操作制限有効化505でボタン201に対応する第2言語のボタン301を有効化し終了する。
【0034】
言語設定判定501で現在表示中の言語が第2言語(相手の使用言語)と判定した場合は、翻訳506で第2翻訳部4を使用して入力部300に新たに入力された文章の第2言語から第1言語への翻訳を行い、表示言語変更507で表示装置2の画面を第1言語に戻し、翻訳結果を入力部200に表示する。入力言語変更508では入力装置1(ソフトウェアキーボード等)の入力言語を第1言語に戻し、操作制限無効化509でボタン301に対応する第1言語のボタン201を有効にして終了し図6の入力判定408へ戻る。
【0035】
先行技術では翻訳方向が一方向に限られている(日→英、日→中、日→韓)ため、2人のユーザによる双方向のコミュニケーションが考慮されていない。本実施形態では、一般的なタブレット端末にも搭載されている地磁気センサ、ジャイロセンサを併用することにより、図4(a)の提示動作に加え、図4(b)、図4(c)のような傾きの変化しない提示動作を検出し翻訳に使用することができる。
【0036】
さらに、本実施形態の制御部では、翻訳と同時に翻訳方向の切り替えを行う。これにより、1台の端末を利用言語の異なる2人が共有して使用することができることが特徴である。また、相手に端末を提示しているときは利用機能に制限をかけることが可能であるので、端末を安心して渡すことができる。
【0037】
即ち本実施形態により、提示の方法を選ばずに相手に端末を提示するだけで翻訳操作を完了させることができる。さらに、翻訳と同時に表示言語、入力言語、翻訳部が切り替わっているので、電子機器、機械翻訳装置として例えば以下に列挙するような1台の端末を外国人と共有し双方向の翻訳によるコミュニケーションを図ることができる。相手の入力を待ち受けている状態のときは、文章入力以外の操作を無効にすることができるため、安心して端末を渡すことができる。
【0038】
(1)文章を入力する入力装置と、翻訳結果を表示する表示装置と、文章の第1言語から第2言語への翻訳を行う第1翻訳部と、文章の第2言語から第1言語への翻訳を行う第2翻訳部と、物理量を測定するセンサと、各センサの測定値を記憶する測定値記憶部と、端末の移動量を累積する移動量累積部と、現在のセンサ測定結果と測定値記憶部の記憶したセンサ測定結果の差をもとに端末の提示動作の発生を検知する提示動作判定部と、提示動作判定部の出力である提示動作の発生または中止によって入力装置、表示装置の言語と翻訳部を切り替える制御部を備えることを特徴とする機械翻訳端末。
【0039】
(2)前記提示動作判定部は、加速度センサで重力加速度を測定し、その方向が最後に操作を行ったときの測定結果と逆転している場合に提示動作中であると判定することを特徴とする(1)の機械翻訳端末。
【0040】
(3)前記端末提示判定手段は、加速度センサと地磁気センサにより方位を測定し、その方向が最後に操作を行ったときの測定結果と逆転している場合に提示動作中であると判定することを特徴とする(1)の機械翻訳端末。
【0041】
(4)前記端末提示判定手段は、ジャイロセンサで端末の移動角速度を測定、その累積値によって最後に操作を行ったときときからの移動量を計算し、閾値を超えたと判定したときに提示動作中であると判定することを特徴とする(1)の機械翻訳端末。
【0042】
(5)前記制御部が言語を切り替えるのと連動し端末の操作を制限し、言語を元に戻したときに操作の制限を解除することを特徴とする(1)の機械翻訳端末。
【0043】
なお、この発明は上記実施形態に限定されるものではなく、この外その要旨を逸脱しない範囲で種々変形して実施することができる。
【0044】
また、上記した実施の形態に開示されている複数の構成要素を適宜に組み合わせることにより、種々の発明を形成することができる。例えば、実施の形態に示される全構成要素から幾つかの構成要素を削除しても良いものである。さらに、異なる実施の形態に係わる構成要素を適宜組み合わせても良いものである。
【符号の説明】
【0045】
11…音声復号部、12…DA変換器、13…増幅器、14…増幅器、15…AD変換器、16…ユーザ-マイク間距離検出部、17…音声符号部、21…周波数変換部、22…帯域パワー計算部、23…雑音推定部、24…SNR計算部、25…ゲイン算出部、26…ゲイン加重部、27…周波数逆変換部、100…電子機器、110…表示部、120…CPU、130…システムコントローラ、140…グラフィックスコントローラ、150…タッチパネルコントローラ、160…加速度センサ、170…不揮発性メモリ、180…RAM、190…操作スイッチ、200…音声処理部、210…マイク、220…スピーカ、230…地磁気センサ、240…通信部、111…タッチパネル、112…ディスプレイ、B…筐体。
【技術分野】
【0001】
本発明の実施形態は、電子機器及び機械翻訳方法に関する。
【背景技術】
【0002】
いわゆる機械翻訳端末などの電子機器が用いられている。例えば、センサとしては加速度センサを含み、実施例には日本語から外国語に翻訳する辞書を有するものがある(例えば、特許文献1参照。)。
【0003】
そこでは加速度センサによる傾きを検出し翻訳を行っているが、その場合は端末の天地を逆転させる提示動作しか検出することができない。即ち端末を移動した場合は端末の傾きが変化しないため使用できないという問題があった。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2010−33414号公報(第1図、段落0018)
【発明の概要】
【発明が解決しようとする課題】
【0005】
本発明の実施の形態は、機器の傾きの変化しない提示動作を検出し翻訳に利用することができる技術を提供することを目的とする。
【課題を解決するための手段】
【0006】
上記課題を解決するために、実施形態によれば電子機器は、文章を入力する入力装置と、翻訳結果を表示する表示装置と、前記文章の第1言語から第2言語への翻訳を行う第1翻訳部と、前記文章の前記第2言語から前記第1言語への翻訳を行う第2翻訳部と、物理量を測定するセンサと、前記センサの測定値を記憶する測定値記憶部と、前記センサの測定値を累積(積分)し、移動量を得る移動量累積部と、現在の前記センサの測定結果および前記移動量累積部で算出した移動量と前記測定値記憶部の記憶した前記センサの測定結果の差をもとに外部から与えられた提示動作の発生を検知する提示動作判定部と、前記提示動作判定部の出力である提示動作の発生または中止によって前記入力装置、前記表示装置の言語と前記第1翻訳部と前記第2翻訳部を切り替える制御部とを備える。
【図面の簡単な説明】
【0007】
【図1】実施形態にかかる電子機器の外観を模式的に示す図。
【図2】実施形態にかかる電子機器のハードウェア構成の一例を示すブロック構成図。
【図3】この発明の一実施形態を示す機能システム図。
【図4】同実施形態の端末提示動作を説明するために示す図。
【図5】同実施形態に用いられる表示装置の画面構成、端末提示動作中の画面構成例を示す図。
【図6】同実施形態の提示動作判定部のフローチャート。
【図7】同他の形態に用いられる制御部のフローチャート。
【発明を実施するための形態】
【0008】
以下、添付図面を参照して実施形態にかかる電子機器及び制御(機械翻訳)方法を説明する。なお、以下の実施形態では、PDAや携帯電話等、ユーザが把持して使用する電子機器を例に説明する。
【0009】
図1は、実施形態にかかる電子機器100の外観を模式的に示す図である。電子機器100は、表示画面を備えた情報処理装置であり、例えばスレート端末(タブレット端末)や電子書籍リーダ、デジタルフォトフレーム等として実現されている。なお、ここでは、X軸、Y軸、Z軸の矢印方向(Z軸では図の正面方向)を正方向としている(以下同様)。図3以下では、この電子機器100を機械翻訳端末として機能される例を後述する。
【0010】
電子機器100は、薄い箱状の筐体Bを備え、この筐体Bの上面に表示部110が配置されている。表示部110は、ユーザによってタッチされた表示画面上の位置を検知するタッチパネル(図2、タッチパネル111参照)を備えている。また、筐体Bの正面下部にはユーザが各種操作を行う操作スイッチ等である操作スイッチ190、ユーザの音声を取得するためのマイク210が配置されている。また、筐体Bの正面上部には音声出力を行うためのスピーカ220が配置されている。また、筐体Bの縁には、地磁気を検知する地磁気センサ230が配置されている。なお、図示例ではX軸方向の左右の縁に地磁気センサ230を備える構成を例示したが、Y軸方向の上下の縁に地磁気センサ230を備えてもよい。なお、2箇所に地磁気センサを備えているのは、近くに磁性体などがあった場合にセンサ出力の差分をとるなどしてその影響を捨象するためである。
【0011】
図2は、実施形態にかかる電子機器100のハードウェア構成の一例を示すブロック図である。図2に示すように、電子機器100は、上述の構成に加え、CPU120、システムコントローラ130、グラフィックスコントローラ140、タッチパネルコントローラ150、加速度センサ160、不揮発性メモリ170、RAM180、音声処理部200、通信部240等を備えている。また音声処理部200には内蔵または外付けのマイク210とスピーカ220とが接続されている。
【0012】
表示部110は、タッチパネル111と、LCD(Liquid Crystal Display)や有機EL(Electro Luminescence)等のディスプレイ112とから構成されている。タッチパネル111は、例えばディスプレイ112の表示画面上に配置された当面の座標検出装置から構成されている。タッチパネル111は、例えば筐体Bを把持したユーザの指によってタッチされた表示画面上の位置(タッチ位置)を検知することができる。このタッチパネル111の働きにより、ディスプレイ112の表示画面はいわゆるタッチスクリーンとして機能する。
【0013】
CPU120は、電子機器100の動作を中央制御するプロセッサであり、システムコントローラ130を介して電子機器100の各部を制御する。CPU120は、不揮発性メモリ170からRAM180にロードされる、オペレーティングシステム、各種アプリケーションプログラムを実行することで、後述する各機能部(図3など参照)を実現する。RAM180は、電子機器100のメインメモリとして、CPU120がプログラムを実行する際の作業領域を提供する。
【0014】
システムコントローラ130には、不揮発性メモリ170及びRAM180をアクセス制御するメモリコントローラも内蔵されている。また、システムコントローラ130は、グラフィックスコントローラ140との通信を実行する機能も有している。また、システムコントローラ130は、通信部240、インターネット等を介して図示せぬ外部のサーバへ音声波形等の音声信号を送信しこの音声波形に対する音声認識の結果を必要によっては受信する機能も有している。
【0015】
グラフィックスコントローラ140は、電子機器100のディスプレイモニタとして使用されるディスプレイ112を制御する表示コントローラである。タッチパネルコントローラ150は、タッチパネル111を制御し、ユーザによってタッチされたディスプレイ112の表示画面上のタッチ位置を示す座標データをタッチパネル111から取得する。
【0016】
加速度センサ160は、図1に示す3軸方向(X、Y、Z方向)や、これに各軸周りの回転方向の検出を加えた6軸方向の加速度センサ等であって、電子機器100に対する外部からの加速度の向きと大きさを検出し、CPU120に出力する。具体的に、加速度センサ160は、加速度を検出した軸、向き(回転の場合、回転角度)、及び大きさを含んだ加速度検出信号(傾き情報)をCPU120に出力する。なおここでは、角速度(回転角度)検出のためのジャイロセンサを、広義の加速度センサとして加速度センサ160に統合する形態としている。
【0017】
音声処理部200は、マイク210より入力される音声信号に、デジタル変換、ノイズ除去、エコーキャンセル等の音声処理を施してCPU120へ出力する。また、音声処理部200は、CPU120の制御のもとで、音声合成等の音声処理を施して生成した音声信号をスピーカ220へ出力し、スピーカ220による音声報知を行う。この音声処理部200に、後述のユーザ-マイク間距離検出部16がある。この中の音声処理部200の詳細について次に説明する。
【0018】
さて図3は本実施形態の機能構成である。ユーザからの入力を受け付ける入力装置1と、翻訳結果を表示する表示装置2と、文章を第1言語から第2言語へ翻訳する第1翻訳部3と、逆に文章を第2言語から第1言語へ翻訳する第2翻訳部4とに加え、加速度を取得する加速度センサ5,地磁気を取得する地磁気センサ6,角速度を取得するジャイロセンサ7と、角速度を累積(積分)し移動量を得る移動量累積部102と、過去のセンサの測定値を記憶する測定値記憶部101と、前記センサの測定値と移動量累積部102、測定値記憶部101の情報から端末の提示動作が発生したかどうかを判定する提示動作判定部8と、提示動作が発生したときの通知を受け取り、翻訳処理を実行し表示装置2に表示する制御部9とを備える機械翻訳端末である。
【0019】
図4に本実施形態の想定する端末の提示動作を示す。2人のユーザが1台の機械翻訳端末を共有し、互いに対向(図4(a)、(b))、または横に並んでいる(図4(c))状態で使用する。ユーザAは端末の所有者であり、日本語の話者、ユーザBは英語の話者とする。
【0020】
図5はユーザAが端末を持っているときに表示装置2に表示する画面(初期画面)である。図5(a)の画面は日本語で構成されており、入力装置1を使って日本語文章の入力が可能な入力部200と、翻訳機能を終了し別の画面へと遷移するためのボタン201を備える。ユーザAは図4のいずれかの形で端末をユーザBに提示すると翻訳端末は提示動作中であることを判別し、入力部200に入力した文章を第1翻訳部3を使用して英語に翻訳し、画面を図5(b)に切り替える。
【0021】
この図5(b)はユーザAがユーザBに端末を提示しているときに表示装置2に表示する画面である。画面は英語で構成されており、入力装置1を使って英語文章の入力が可能な入力部300と、翻訳機能を終了し別の画面へと遷移するためのボタン301を備える。ボタン301はボタン201と同様、別の画面へと遷移するための機能を持つボタンであるが、ユーザBは端末の所有者ではないので、制御部9によって無効化されている。
【0022】
画面が図5(b)に切り替わったとき、入力部300には入力部200に入力された日本語の英語への翻訳結果が表示される。この状態でユーザBは英語の文章を入力することが可能である。ユーザAが端末の提示をやめ、端末を元の姿勢に戻すと、画面は図5(a)に戻る。このとき、入力部200にはユーザBが入力部300に入力した英語文章を第2翻訳部4を使用して日本語に翻訳した結果が表示される。
【0023】
戻って図4は相手への端末の提示動作を表す。図4(a)は端末のピッチ角を回転し提示を行った場合である。この場合、提示後に端末向きの天地が逆転し、重力加速度の向きが180度変化するので、先行技術と同様、加速度センサだけで提示動作の発生を検出することが可能である。
【0024】
一方、図4(b)のように端末のヨー角を回転し提示を行った場合は、端末に対する重力加速度の向きが変化しないため、加速度センサだけでは提示動作の発生を検出することはできない。しかしこの場合、端末の向きが変化しているため、加速度センサと地磁気センサの測定値によって端末の向き(方位)を取得し、その変化によって提示動作を検出することが可能である。この手法は図2の動作の検出でも使用することができる。
【0025】
図4(c)はユーザが横に並んだ場合の提示動作である。ユーザAが横にいるユーザBに端末を提示する場合、端末の横方向への並行移動とヨー角方向の回転のいずれか、または両方が発生する。この場合、センサ測定値の累積によって移動量を計算することで提示の検出が可能である。
【0026】
以上の原理を元にした提示動作判定部8のフローチャートを図6に示す。処理が開始すると、ステップ初期値設定400は現在の方位と移動量を原点として測定値記憶部101に記憶する。
【0027】
次に、センサ測定値取得401は、加速度センサ5,地磁気センサ6,ジャイロセンサ7からそれぞれ加速度、地磁気、角速度の値を取得する。方位計算402は、前記加速度および地磁気から端末の方位を計算する。
【0028】
方位比較403は、測定値記憶部101に記憶された方位と最新の方位を比較し、変化が認められる場合は提示動作中であるとして提示状態比較404へ、変化が認められない場合は移動量計算406へ進む。
【0029】
提示状態比較404は、提示動作の判定結果が前回の判定結果から切り替わったことを検知すると、制御部起動405へ進む。制御部起動405については後述する制御部9のフローチャート図7で説明する。提示動作の判定結果が変化していない場合は入力判定408へ進む。
【0030】
次に、移動量計算406について説明する。移動量計算406は、センサ測定値取得401で取得した加速度および角速度の値を移動量累積部102に入力し累積処理(積分)を行うことで移動量を計算する。
【0031】
移動量比較407は、測定値記憶部101に記憶された移動量と最新の移動量を比較し、変化が認められる場合は提示動作中であるとして提示状態比較404へ、変化がない場合は入力判定408へ進む。
【0032】
入力判定は408は入力装置1の入力が発生したかどうかを判定し、発生した場合は初期値設定400に進み原点をリセット、発生していない場合はセンサ測定値取得401に戻り処理を繰り返す。
【0033】
次に、制御部9のフローチャートを図7に示す。処理は図6のステップ制御部起動405によって開始する。ステップ言語設定判定501では、現在表示中の言語を元に以降の処理を切り分ける。第1言語(所有者の使用言語)が表示中の場合、翻訳502で第1翻訳部3を使用して入力部200に新たに入力された文章の第1言語から第2言語への翻訳を行い、表示言語変更503で表示装置2の画面を第2言語に切り替え、翻訳結果を入力部300に表示する。入力言語変更504では入力装置1(ソフトウェアキーボード等)の入力言語を第2言語に切り替え、操作制限有効化505でボタン201に対応する第2言語のボタン301を有効化し終了する。
【0034】
言語設定判定501で現在表示中の言語が第2言語(相手の使用言語)と判定した場合は、翻訳506で第2翻訳部4を使用して入力部300に新たに入力された文章の第2言語から第1言語への翻訳を行い、表示言語変更507で表示装置2の画面を第1言語に戻し、翻訳結果を入力部200に表示する。入力言語変更508では入力装置1(ソフトウェアキーボード等)の入力言語を第1言語に戻し、操作制限無効化509でボタン301に対応する第1言語のボタン201を有効にして終了し図6の入力判定408へ戻る。
【0035】
先行技術では翻訳方向が一方向に限られている(日→英、日→中、日→韓)ため、2人のユーザによる双方向のコミュニケーションが考慮されていない。本実施形態では、一般的なタブレット端末にも搭載されている地磁気センサ、ジャイロセンサを併用することにより、図4(a)の提示動作に加え、図4(b)、図4(c)のような傾きの変化しない提示動作を検出し翻訳に使用することができる。
【0036】
さらに、本実施形態の制御部では、翻訳と同時に翻訳方向の切り替えを行う。これにより、1台の端末を利用言語の異なる2人が共有して使用することができることが特徴である。また、相手に端末を提示しているときは利用機能に制限をかけることが可能であるので、端末を安心して渡すことができる。
【0037】
即ち本実施形態により、提示の方法を選ばずに相手に端末を提示するだけで翻訳操作を完了させることができる。さらに、翻訳と同時に表示言語、入力言語、翻訳部が切り替わっているので、電子機器、機械翻訳装置として例えば以下に列挙するような1台の端末を外国人と共有し双方向の翻訳によるコミュニケーションを図ることができる。相手の入力を待ち受けている状態のときは、文章入力以外の操作を無効にすることができるため、安心して端末を渡すことができる。
【0038】
(1)文章を入力する入力装置と、翻訳結果を表示する表示装置と、文章の第1言語から第2言語への翻訳を行う第1翻訳部と、文章の第2言語から第1言語への翻訳を行う第2翻訳部と、物理量を測定するセンサと、各センサの測定値を記憶する測定値記憶部と、端末の移動量を累積する移動量累積部と、現在のセンサ測定結果と測定値記憶部の記憶したセンサ測定結果の差をもとに端末の提示動作の発生を検知する提示動作判定部と、提示動作判定部の出力である提示動作の発生または中止によって入力装置、表示装置の言語と翻訳部を切り替える制御部を備えることを特徴とする機械翻訳端末。
【0039】
(2)前記提示動作判定部は、加速度センサで重力加速度を測定し、その方向が最後に操作を行ったときの測定結果と逆転している場合に提示動作中であると判定することを特徴とする(1)の機械翻訳端末。
【0040】
(3)前記端末提示判定手段は、加速度センサと地磁気センサにより方位を測定し、その方向が最後に操作を行ったときの測定結果と逆転している場合に提示動作中であると判定することを特徴とする(1)の機械翻訳端末。
【0041】
(4)前記端末提示判定手段は、ジャイロセンサで端末の移動角速度を測定、その累積値によって最後に操作を行ったときときからの移動量を計算し、閾値を超えたと判定したときに提示動作中であると判定することを特徴とする(1)の機械翻訳端末。
【0042】
(5)前記制御部が言語を切り替えるのと連動し端末の操作を制限し、言語を元に戻したときに操作の制限を解除することを特徴とする(1)の機械翻訳端末。
【0043】
なお、この発明は上記実施形態に限定されるものではなく、この外その要旨を逸脱しない範囲で種々変形して実施することができる。
【0044】
また、上記した実施の形態に開示されている複数の構成要素を適宜に組み合わせることにより、種々の発明を形成することができる。例えば、実施の形態に示される全構成要素から幾つかの構成要素を削除しても良いものである。さらに、異なる実施の形態に係わる構成要素を適宜組み合わせても良いものである。
【符号の説明】
【0045】
11…音声復号部、12…DA変換器、13…増幅器、14…増幅器、15…AD変換器、16…ユーザ-マイク間距離検出部、17…音声符号部、21…周波数変換部、22…帯域パワー計算部、23…雑音推定部、24…SNR計算部、25…ゲイン算出部、26…ゲイン加重部、27…周波数逆変換部、100…電子機器、110…表示部、120…CPU、130…システムコントローラ、140…グラフィックスコントローラ、150…タッチパネルコントローラ、160…加速度センサ、170…不揮発性メモリ、180…RAM、190…操作スイッチ、200…音声処理部、210…マイク、220…スピーカ、230…地磁気センサ、240…通信部、111…タッチパネル、112…ディスプレイ、B…筐体。
【特許請求の範囲】
【請求項1】
文章を入力する入力装置と、
翻訳結果を表示する表示装置と、
前記文章の第1言語から第2言語への翻訳を行う第1翻訳部と、
前記文章の前記第2言語から前記第1言語への翻訳を行う第2翻訳部と、
物理量を測定するセンサと、
前記センサの測定値を記憶する測定値記憶部と、
前記センサの測定値を累積(積分)し、移動量を得る移動量累積部と、
現在の前記センサの測定結果および前記移動量累積部で算出した移動量と前記測定値記憶部の記憶した前記センサの測定結果の差をもとに外部から与えられた提示動作の発生を検知する提示動作判定部と、
前記提示動作判定部の出力である提示動作の発生または中止によって前記入力装置、前記表示装置の言語と前記第1翻訳部と前記第2翻訳部を切り替える制御部とを備える電子機器。
【請求項2】
前記提示動作判定部は、加速度センサで重力加速度を測定し、その方向が最後に外部から操作が行われたときの測定結果と逆転している場合に提示動作中であると判定する請求項1に記載の電子機器。
【請求項3】
前記提示動作判定部は、加速度センサと地磁気センサにより方位を測定し、その方向が最後に操作を行ったときの測定結果と逆転している場合に提示動作中であると判定する請求項1に記載の電子機器。
【請求項4】
前記提示動作判定部は、ジャイロセンサで端末の移動角速度を測定、その累積値によって最後に操作を行ったときときからの移動量を計算し、閾値を超えたと判定したときに提示動作中であると判定する請求項1に記載の電子機器。
【請求項5】
前記制御部が言語を切り替えるのと連動し端末の操作を制限し、言語を元に戻したときに操作の制限を解除する請求項1に記載の電子機器。
【請求項6】
文章を入力する入力工程と、
翻訳結果を表示する表示工程と、
前記文章の第1言語から第2言語への翻訳を行う第1翻訳工程と、
前記文章の前記第2言語から前記第1言語への翻訳を行う第2翻訳工程と、
物理量を測定するセンサの測定値を記憶する測定値記憶工程と、
前記センサの測定値を累積(積分)し、移動量を得る移動量累積工程と、
現在の前記センサの測定結果および前記移動量累積工程で算出した移動量と前記測定値記憶工程で記憶した前記センサの測定結果の差をもとに外部から与えられた提示動作の発生を検知する提示動作判定工程と、
前記提示動作判定工程の出力である提示動作の発生または中止によって前記入力工程、前記表示工程の言語と前記第1翻訳工程と前記第2翻訳工程を切り替える制御工程とを含む機械翻訳方法。
【請求項1】
文章を入力する入力装置と、
翻訳結果を表示する表示装置と、
前記文章の第1言語から第2言語への翻訳を行う第1翻訳部と、
前記文章の前記第2言語から前記第1言語への翻訳を行う第2翻訳部と、
物理量を測定するセンサと、
前記センサの測定値を記憶する測定値記憶部と、
前記センサの測定値を累積(積分)し、移動量を得る移動量累積部と、
現在の前記センサの測定結果および前記移動量累積部で算出した移動量と前記測定値記憶部の記憶した前記センサの測定結果の差をもとに外部から与えられた提示動作の発生を検知する提示動作判定部と、
前記提示動作判定部の出力である提示動作の発生または中止によって前記入力装置、前記表示装置の言語と前記第1翻訳部と前記第2翻訳部を切り替える制御部とを備える電子機器。
【請求項2】
前記提示動作判定部は、加速度センサで重力加速度を測定し、その方向が最後に外部から操作が行われたときの測定結果と逆転している場合に提示動作中であると判定する請求項1に記載の電子機器。
【請求項3】
前記提示動作判定部は、加速度センサと地磁気センサにより方位を測定し、その方向が最後に操作を行ったときの測定結果と逆転している場合に提示動作中であると判定する請求項1に記載の電子機器。
【請求項4】
前記提示動作判定部は、ジャイロセンサで端末の移動角速度を測定、その累積値によって最後に操作を行ったときときからの移動量を計算し、閾値を超えたと判定したときに提示動作中であると判定する請求項1に記載の電子機器。
【請求項5】
前記制御部が言語を切り替えるのと連動し端末の操作を制限し、言語を元に戻したときに操作の制限を解除する請求項1に記載の電子機器。
【請求項6】
文章を入力する入力工程と、
翻訳結果を表示する表示工程と、
前記文章の第1言語から第2言語への翻訳を行う第1翻訳工程と、
前記文章の前記第2言語から前記第1言語への翻訳を行う第2翻訳工程と、
物理量を測定するセンサの測定値を記憶する測定値記憶工程と、
前記センサの測定値を累積(積分)し、移動量を得る移動量累積工程と、
現在の前記センサの測定結果および前記移動量累積工程で算出した移動量と前記測定値記憶工程で記憶した前記センサの測定結果の差をもとに外部から与えられた提示動作の発生を検知する提示動作判定工程と、
前記提示動作判定工程の出力である提示動作の発生または中止によって前記入力工程、前記表示工程の言語と前記第1翻訳工程と前記第2翻訳工程を切り替える制御工程とを含む機械翻訳方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2013−114433(P2013−114433A)
【公開日】平成25年6月10日(2013.6.10)
【国際特許分類】
【出願番号】特願2011−259634(P2011−259634)
【出願日】平成23年11月28日(2011.11.28)
【出願人】(000003078)株式会社東芝 (54,554)
【Fターム(参考)】
【公開日】平成25年6月10日(2013.6.10)
【国際特許分類】
【出願日】平成23年11月28日(2011.11.28)
【出願人】(000003078)株式会社東芝 (54,554)
【Fターム(参考)】
[ Back to top ]