
電子的に冗長な宇宙機の電力および姿勢制御システム
【課題】宇宙機用のエネルギー蓄積フライホイール・システムを提供する。
【解決手段】宇宙機用のエネルギー蓄積フライホイール・システムは、電子的に冗長な電力および姿勢制御システムを用いて実施される。詳細には、このシステムは、複数のフライホールと、各フライホイールと関連する多チャネル処理モジュールおよび多チャネル電力制御モジュールとを含む。それぞれの多チャネル処理モジュールは、アクティブ・モードまたはスタンバイ・モードの何れかで動作する複数のコントローラを含み、それぞれの多チャネル電力制御モジュールは、アクティブ・モードまたはスタンバイ・モードの何れかで動作する複数の電力制御回路を含む。
【解決手段】宇宙機用のエネルギー蓄積フライホイール・システムは、電子的に冗長な電力および姿勢制御システムを用いて実施される。詳細には、このシステムは、複数のフライホールと、各フライホイールと関連する多チャネル処理モジュールおよび多チャネル電力制御モジュールとを含む。それぞれの多チャネル処理モジュールは、アクティブ・モードまたはスタンバイ・モードの何れかで動作する複数のコントローラを含み、それぞれの多チャネル電力制御モジュールは、アクティブ・モードまたはスタンバイ・モードの何れかで動作する複数の電力制御回路を含む。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、エネルギー蓄積フライホイール・システムに関し、より詳細には、宇宙機の電力および姿勢制御用の電子冗長エネルギー蓄積フライホイール・システム制御システムに関する。
【背景技術】
【0002】
米国政府により支援された研究または開発に関する表明
本発明は、空軍研究所(Air Force Research Laboratory)から授与された契約第F29601−01−2−0046号のもとに政府に援助されてなされたものである。政府は、本発明の一定の権利を有する。
【0003】
多くの人工衛星および他の宇宙機、ならびに一部の地上の定置応用例、および外洋船などのビークル(vehicle、運送手段)応用例では、その運送手段にバックアップ電源を提供するため、および姿勢制御を行うために、1または複数のエネルギー蓄積フライホイール・システムを備えることがある。このようなシステムでは、各フライホイール・システムは、運送手段の配電システムの電力需要のバランスをとるように制御および調整され、また、プログラムされた命令、または運送手段内の主コントローラによって受信された遠隔からの姿勢(またはトルク)命令に応答して制御されることができる。
【0004】
多くのエネルギー蓄積フライホイール・システムは、ハウジング・アセンブリ内に回転自在に支持された1または複数の構成要素を含む。回転群と呼ばれることもあるこれらの構成要素は、例えばエネルギー蓄積フライホイール、モータ/発電機、およびシャフトを含む。詳細には、エネルギー蓄積フライホイールおよびモータ/発電機はシャフトに取り付けられ、このシャフトは、1または複数の軸受アセンブリによってハウジング・アセンブリ内で回転自在に支持される。多くの場合、シャフトは、1または複数の主軸受(primary bearing)アセンブリと、1または複数の副軸受(secondary bearing)(バックアップ軸受)アセンブリとを使用して、回転自在に支持される。例えば、多くの人工衛星および宇宙機の応用例において、フライホイール・システムは、主軸受アセンブリとして機能する1または複数の磁気軸受アセンブリと、副軸受アセンブリとして機能する1または複数の機械式軸受アセンブリとを含むことがある。一般には、主軸受アセンブリは、回転群を回転自在に支持するために使用され、副軸受アセンブリは、その回転群とは係合されていない。1または複数の主軸受アセンブリが、例えば機能不良のために作動しなくなったり、それとは別の理由で回転群を回転自在に支持するように動作できなくなった場合、副軸受アセンブリが係合し、それによって回転群を回転自在に支持する。
【0005】
1または複数の上述の構成要素、および/またはこれらの構成要素に付随する電気・電子制御システムは、エネルギー蓄積フライホイール・システム動作中に動作不能になりうることが考えられ得る。このような場合、エネルギー蓄積フライホイール・システム全体が動作不能になることがある。従って、システムが運用不能になる可能性を低減させるために、エネルギー蓄積フライホイール・システム内に十分な冗長性を与えることが、とりわけ宇宙応用例では、望ましい。残念ながら、デュアル・モータ/発電機、および/またはデュアル主軸受、および/またはデュアル電気・電子制御システムなどのようなほとんどの冗長方式は、望ましくないことに、システム全体の重量を増加させる。
【発明の開示】
【発明が解決しようとする課題】
【0006】
従って、電気的にも電子的にも冗長でありながら、システム全体および宇宙機の重量を大幅には増加させないようなエネルギー蓄積フライホイール・システムが、宇宙機応用例では必要とされている。本発明は、少なくともこの必要性に応じるものである。
【課題を解決するための手段】
【0007】
本発明は、宇宙機(spacecraft)の電力および姿勢制御用の電子冗長エネルギー蓄積フライホイール・システム(electronically redundant energy storage flywheel system)を提供する。一実施形態では、例示的なものにすぎないが、エネルギー蓄積フライホイール・システムはシャフト、フライホイール・アセンブリ、複数の磁気軸受、モータ/発電機、およびフライホイール制御モジュールを含む。フライホイール・アセンブリは、シャフトに取り付けられる。それぞれの磁気軸受アセンブリは、一次(主)アクチュエータ・コイルおよび二次(副)アクチュエータ・コイルを含み、各アクチュエータ・コイルは、選択的に電力供給(通電)および電力遮断されるように適合され、通電されているときにフライホイール・アセンブリを非接触様式で回転自在に取り付けるように構成される。モータ/発電機は、エネルギー蓄積フライホイールに結合され、モータ・モードまたは発電機モードの何れかで動作するように構成される。モータ/発電機は、ロータおよびステータを含み、ステータは、一次(主)ステータ・コイルおよび二次(副)ステータ・コイルを含む。フライホイール制御モジュールは、少なくとも磁気軸受アセンブリおよびモータ/発電機を制御するように構成され、多チャネル処理モジュールおよび多チャネル電力制御モジュールを含む。この多チャネル処理モジュールは、少なくとも一次(主)処理チャネルおよび二次(副)処理チャネルを含む。それぞれの処理チャネルは、少なくとも磁気軸受アセンブリ電力制御命令およびモータ/発電機電力制御命令を選択的に与えるように構成される。多チャネル電力制御モジュールは、多チャネル処理モジュールと通信し、少なくとも一次(主)電力制御チャネルおよび二次(副)電力制御チャネルを含む。それぞれの電力制御チャネルは、少なくとも磁気軸受電力制御命令およびモータ/発電機電力制御命令を受け取るように結合され、それらを受け取ると、それぞれの磁気軸受アセンブリの主アクチュエータ・コイルまたは副アクチュエータ・コイルの何れかに選択的に磁気軸受作動電力を供給するように動作し、また、主ステータ・コイル組または副ステータ・コイル組の何れかに選択的に電力を供給するように又はそれらの何れからから電力を引き出すように動作する。
【0008】
好ましいエネルギー蓄積フライホイール制御システムの他の個別の特徴および利点は、本発明の原理を例示的に示す添付の図面と併せて以下の詳細な説明により、明らかになるであろう。
【発明を実施するための最良の形態】
【0009】
詳細な説明に移る前に、説明する実施形態は宇宙機と組み合わせた使用に限定されないことを、理解されたい。即ち、本実施形態は、説明の便宜上、人工衛星で実施されるものとして示し説明するが、地球上でも地球外でも、他のシステムおよび環境においても実施できることを理解されたい。
【0010】
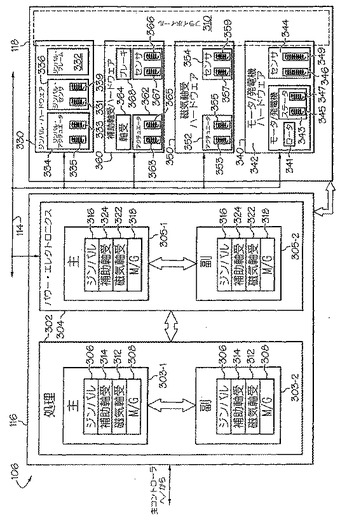
次に説明に移る。図1を参照すると、宇宙機用の例示的な一体化された電力および姿勢制御システム100の機能ブロック図が示されている。システム100は、主コントローラ102、主電源104、および複数のフライホイール・システム106(106−1、106−2、106−3、・・・106−N)を含む。システム100を使用できる宇宙機200の例示的な物理的実施形態の平面図が、図2に示されている。
【0011】
主コントローラ102は、例えば地上局または搭載したオートパイロット108から姿勢命令(またはトルク命令)を受け取り、配電システム114を監視し、フライホイール・システム106の動作を適切に制御する。トルク命令に応答して、フライホイール・システム106は、適切な姿勢外乱を宇宙機に誘発するように制御され、それによって宇宙機の姿勢を制御する。加えて、配電システム114の状態に応じて、フライホイール・システム106は、配電システムへ電気エネルギーを供給するように、あるいは配電システムから電気エネルギーを引き出すように、制御される。1または複数の姿勢センサ110や1または複数のレート(rate、速度)センサ112などのような、1または複数の宇宙機のダイナミック・センサが、宇宙機の姿勢および姿勢変化率をそれぞれ感知し、それらを表すフィードバック信号を主コントローラ102へ供給する。主コントローラ102と、それが電力および姿勢を制御するために実施する処理との詳細な説明は、請求の範囲に記載されている本発明を可能にするため又は説明するために必要なものではないので、行わない。
【0012】
主電源104は、その名が暗示するように、配電システム114への電力の主要な供給源である。システム100が宇宙機で実施される図示の実施形態では、主電源104は、1または複数の太陽電池パネルであり、それぞれが、光エネルギーを電気エネルギーに変換するための太陽電池のアレイを含む。太陽電池パネル104は、宇宙機自体に取り付けることができ、あるいは、宇宙機から延びる固定または可動の構造体に取り付けることもできる。宇宙機200が、例えば地球の陰に入るなどのような、日光を受けない位置にあるときには、バックアップ電源が必要になる。上記で暗に示したように、姿勢制御を実現することに加えて、フライホイール・システム106はまた、バックアップ電源としても機能する。フライホイール・システム106はまた、電気的負荷に必要とされる電力が主電源104の能力を超えた場合に、電力を供給することもできる。バッテリ115(図1に透視図的に示す)などのような他のバックアップ電源を設けてもよいことを、理解されたい。
【0013】
システム100は、N個のエネルギー蓄積フライホイール・システム106(106−1、106−2、106−3、・・・1−6−N)を含む。システム100は、好ましくは、幾つかのフライホイール・システム106がアクティブであり、残りのうちの1または複数のフライホイール・システム106がスタンバイの非アクティブ化状態にあるように構成される。従って、システム100は、少なくとも単一故障耐性(single fault tolerant)である。アクティブであるフライホイール・システム106の数は、システム要件に応じて変わりうる。特定の好ましい実施形態では、4個のフライホイール・システム106がアクティブであり、残りが非アクティブである。
【0014】
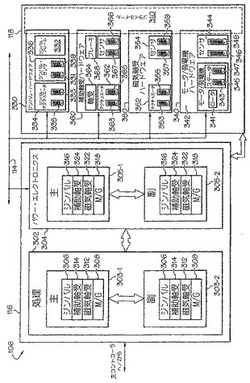
フライホイール・システム106のそれぞれは、フライホイール制御モジュール116(116−1、116−2、116−3、・・・116−N)、およびフライホイール・ハードウェア118(118−1、118−2、118−3、・・・118−N)を含む。フライホイール制御モジュール116は、それぞれ、主コントローラ102と通信し、少なくとも図示の実施形態では、データ・バス111を介して互いに通信する。主コントローラ102は、上記のように、各フライホイール制御モジュール116へ姿勢制御命令を与える。次に、フライホイール制御モジュール116は、関連するフライホイール・ハードウェア118の相対的な姿勢および角速度を制御して、宇宙機200の姿勢制御を行う。フライホイール制御モジュール116はまた、主コントローラ102からの命令に応答して、関連するフライホイール・ハードウェア118の動作を、モータ・モードまたは発電機モードの何れかで制御し、また、関連するフライホイール・ハードウェア118の回転加速度を各モードで制御する。フライホイール制御モジュール116はまた、好ましくは、関連するフライホイール・ハードウェア118の種々のパラメータを監視し、表示信号を主コントローラ102へ供給する。1つのフライホイール・システム106の例示的な実施形態のブロック図が図3に示されており、それについて次に詳細に論じる。
【0015】
図示の実施形態では、フライホイール制御モジュール116のそれぞれは、多チャネル処理モジュール302、および多チャネル・パワー・エレクトロニクス・モジュール304を含む。フライホイール・ハードウェア118は、エネルギー蓄積フライホイール・アセンブリ310、ジンバル・ハードウェア330、モータ/発電機ハードウェア340、磁気軸受ハードウェア350、および補助軸受ハードウェア360を含む。これらのフライホイール制御モジュール116およびフライホイール・ハードウェア118の上記部分のそれぞれの特定の好ましい実施形態を、より詳細に次に説明する。
【0016】
多チャネル処理モジュール302は、複数の個別の処理チャネル303を用いて実施される。図示の実施形態では、多チャネル処理モジュール302および多チャネル電力制御モジュール304は、それぞれ、2つの個別チャネルで実施されている。より詳細には、多チャネル処理モジュール302は、主処理チャネル303−1および副処理チャネル303−2を用いて実施され、多チャネル電力制御モジュール304は、主電力制御チャネル305−1および副電力制御チャネル305−2を用いて実施される。しかし、多チャネル処理モジュール302および多チャネル電力制御モジュール304の何れかまたは両方が、必要に応じてまたは要望に応じて、2つより多くの個別チャネル(例えば、それぞれ303−1、303−2、・・・303−N、および305−1、305−2、・・・305−N)を用いて実施されてもよいことを、理解されたい。以下で更に説明するように、各モジュール302、304のチャネル303、305のうちの1つの少なくとも一部がアクティブ・モードで動作して、フライホイール・ハードウェア118の動作を制御し、他のチャネル(場合により複数のチャネル)303、305の少なくとも一部がスタンバイ・モードで動作しており、それによって、フライホイール・システム106の適切な電気的および電子的な冗長性が実現される。
【0017】
処理チャネル303は、それぞれ、複数の低レベル・デジタル・コントローラ、即ち、低レベル・デジタル・ジンバル・コントローラ306、低レベルモータ/発電機コントローラ308、低レベル磁気軸受コントローラ312、および低レベル補助軸受コントローラ314を実施するように構成される。同様に、それぞれの電力制御チャネル305は、複数のパワー・エレクトロニクス回路、即ち、ジンバル・パワー・エレクトロニクス回路316、モータ/発電機パワー・エレクトロニクス回路318、磁気軸受パワー・エレクトロニクス回路322、および補助軸受パワー・エレクトロニクス回路324を実施するように構成される。それぞれの処理チャネル303は、多数の技法のうちの任意の1つによって、図示の低レベル・デジタル・コントローラ306〜314を実施するように構成できることを、理解されたい。例えば、それぞれの処理チャネル303は、プログラマブル・プロセッサまたはデジタル信号プロセッサなどの1つの信号処理デバイスが4つすべての低レベル・デジタル・コントローラ306〜314を実施するように、構成することもできる。代替例として、それぞれの処理チャネル303は、4つの別々の処理デバイスを用いて構成することもでき、各処理デバイスが、低レベル・デジタル・コントローラ306〜312のうちの1つを実施するようにする。同様に、それぞれの電力制御チャネル305もまた、多数の技法のうちの任意の1つによって、図示のパワー・エレクトロニクス回路316〜324を実施できることを理解されたい。しかし、それぞれの電力制御チャネル305は、4つの別々のパワー・エレクトロニクス回路316〜324を用いて構成されることが好ましい。
【0018】
上記で暗に示したように、処理モジュール302およびパワー・エレクトロニクス・モジュール304は、そのフライホイール・システム106の適切な冗長性を実現するように更に構成される。処理モジュール302およびパワー・エレクトロニクス・モジュール304がこの冗長性を実現する方法は多様であってよいことを、理解されたい。例えば、図示の実施形態における処理モジュール302は、主処理チャネル303−1などのような1つの処理チャネルがアクティブ・モードであり、副処理チャネル303−2などのような他の処理チャネルがスタンバイ・モードであるように、構成することができる。この構成では、主処理チャネル303−1のすべての低レベル・デジタル・コントローラ306〜314と、副処理チャネル303−2のすべての低レベル・デジタル・コントローラ306〜314とは、何れかがアクティブ・モードまたはスタンバイ・モードになる。より詳細には、主処理チャネル306〜314内のすべての低レベル・デジタル・コントローラ306〜314がアクティブ・モードである場合、副処理チャネル303−2内のすべての低レベル・デジタル・コントローラ306〜314はスタンバイ・モードになる。しかし、主処理チャネル303−1の低レベル・デジタル・コントローラ306〜314のうちの1または複数のものが故障しているか動作不能であると主コントローラ102が判定した場合、主コントローラ102は、処理回路302に命令して、主処理チャネル303−1のすべての低レベル・デジタル・コントローラ306〜314をスタンバイ・モードに切り換え、副処理チャネル303−2のすべての低レベル・デジタル・コントローラ306〜314をアクティブ・モードに切り換えるようにする。
【0019】
別の実施形態では、それぞれの処理チャネル303のすべての低レベル・デジタル・コントローラ306〜314が常に同じモードであるとは限らない。例えば、主処理チャネル303−1のすべての低レベル・デジタル・コントローラ306〜314が最初はアクティブ・モードであり、副処理チャネル303−2のすべての低レベル・デジタル・コントローラ306〜314が最初はスタンバイ・モードであり、主コントローラが、例えば、アクティブの低レベル・デジタル・ジンバル・コントローラ306が故障しているか動作不能であると判定するものとする。この代替の実施形態では、処理回路302は、主処理チャネル303−1の低レベル・デジタル・ジンバル・コントローラ306だけをスタンバイ・モードに切り換え、副処理チャネル303−2の低レベル・デジタル・ジンバル・コントローラ306だけをアクティブ・モードに切り換えるように、命令される。主処理チャネル303−1および副処理チャネル303−2の両方の他のすべての低レベル・デジタル・・ジンバル・コントローラ308〜314は、最初のアクティブ状態またはスタンバイ状態にとどまる。
【0020】
パワー・エレクトロニクス・モジュール304は、上述の冗長性を実現する方法の何れかによって同様に構成できることを理解されたい。つまり、パワー・エレクトロニクス・モジュール304は、それぞれの電力制御チャネル305のすべてのパワー・エレクトロニクス回路316〜324が常に同じモードであるように、あるいはそれぞれの電力制御チャネル305のパワー・エレクトロニクス回路316〜324を、必要または要望に応じて、異なるモードにできるように、構成することができる。完璧を期するために、それぞれの低レベル・デジタル・コントローラ306〜314、それぞれのパワー・エレクトロニクス回路316〜324、および関連するフライホイール・ハードウェア118の機能を簡潔に説明する。
【0021】
低レベル・デジタル・ジンバル・コントローラ306は、それぞれ、主コントローラ102からジンバル角速度命令を受け取り、それに応答して、適切なジンバル電力制御命令を発生するように構成される。しかし、フライホイール・システムの動作中に、アクティブの低レベル・デジタル・ジンバル・コントローラ306だけがジンバル電力命令を生成することを理解されたい。アクティブの低レベル・デジタル・ジンバル・コントローラ306によって生成されたジンバル電力命令は、ジンバル・パワー・エレクトロニクス回路316へ与えられる。ジンバル・パワー・エレクトロニクス回路316は、それぞれ、アクティブのときに、ジンバル電力命令に応答するように構成され、ジンバル・ハードウェア330の少なくとも一部に選択的に電力を与える(以下で更に説明)。低レベル・ジンバル・コントローラ306およびジンバル・パワー・エレクトロニクス回路316はまた、ジンバル・ハードウェア330から種々のフィードバック信号も受け取る。これらのフィードバック信号は、アクティブの低レベル・デジタル・ジンバル・コントローラ306内、およびアクティブのパワー・エレクトロニクス回路316で、姿勢制御を行うため、およびジンバル・ハードウェア330の動作性を判定するために、使用される。アクティブの低レベル・デジタル・ジンバル・コントローラ306、およびアクティブのジンバル・パワー・エレクトロニクス回路316はまた、これらのフィードバック信号、ならびにそれら自体の健康状態を表す信号を、主コントローラ102へ供給する。
【0022】
図示の実施形態では、ジンバル・ハードウェア330は、1または複数のジンバル・フレーム332、1または複数のアクチュエータ334、および1または複数のジンバル・センサ336を含む。フライホイール・アセンブリ310は、ジンバル・フレーム332においてジンバル軸について回転自在に取り付けられる。このジンバル軸は、エネルギー蓄積フライホイール・アセンブリ310のスピン軸に対して垂直である。ジンバル・アクチュエータ334は、ジンバル・フレーム332に結合され、また、配電システム114と多チャネルパワー・エレクトロニクス・モジュール304との間に結合される。ジンバル・アクチュエータ334は、好ましくは、電気機械アクチュエータとして実施され、少なくとも主駆動コイル333および副駆動コイル335を含む。主駆動コイル333および副駆動コイル335は、それぞれ、選択的に電力供給されるように結合され、電力供給されると動作して、ジンバル・アクチュエータ334がフライホイール・アセンブリ310をジンバル・フレーム332に対して動かすようにさせる。
【0023】
駆動コイル333、335は、アクティブの低レベル・デジタル・ジンバル・コントローラ306およびアクティブのジンバル・パワー・エレクトロニクス回路316へ供給されるフィードバック信号に少なくとも部分的に基づいて、選択的に電力供給される。より詳細には、例えば、主駆動コイル333は、通常は選択的に電力供給されるように構成される。しかし、アクティブの低レベル・デジタル・ジンバル・コントローラ306および/またはアクティブのジンバル・パワー・エレクトロニクス回路316が、ジンバル・ハードウェア330から供給されるフィードバック信号に少なくと部分的に基づいて、主駆動コイル333が動作不能と判定した場合には、フライホイール・システム106は、それ自体を自動的に再コンフィギュレーションして、アクティブの低レベル・デジタル・ジンバル・コントローラ306およびアクティブのジンバル・パワー・エレクトロニクス回路316のそれぞれにより副駆動コイル335が制御され選択的に電力供給されるようにする。
【0024】
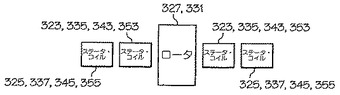
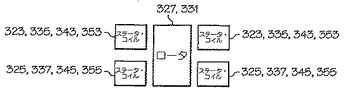
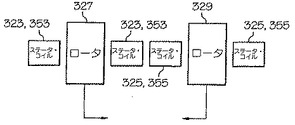
ジンバル・アクチュエータ334は、多数の構成のうちの任意の1つによって実施できることを理解されたい。例えば、ジンバル・アクチュエータ334は、主駆動コイル333も副駆動コイル335も1つのロータ337に関連するように、実施することができる。このような場合では、図6および図7に示されるように、駆動コイル333、335は互いに径方向または軸方向の何れかにずらして配することができる。代替例として、図8に示されるように、ジンバル・アクチュエータ334は、それぞれの駆動コイル333、335がそれ自体の個別のロータ337、339に関連するように、実施することもできる。
【0025】
一般に知られているように、宇宙機での姿勢制御は、特定の速度(例えば角速度)でジンバル角度を変化させることによって、実施することができる。即ち、主コントローラ102から受け取った命令に応答して、アクティブのジンバル・コントローラ306は、適切なジンバル・アクチュエータ電力制御命令をアクティブのジンバル・アクチュエータ・パワー・エレクトロニクス回路316へ与え、この回路は、配電システム114を介して、ジンバル・アクチュエータの主コイル333または副コイル335の何れかへ選択的に電力供給する。それに応じて、ジンバル・アクチュエータ334は、フライホイール・アセンブリ310を、ジンバル・フレーム332に対して、適切な角速度で、適切に配置する。好ましくは1または複数の主センサ331および1または複数の副センサ339を含むジンバル・センサ336は、ジンバル・フレーム332に対するフライホイール・アセンブリ310の少なくとも位置および速度を感知し、位置および速度のフィードバック信号をアクティブの低レベル・デジタル・ジンバル・コントローラ306およびアクティブのジンバル・パワー・エレクトロニクス回路316へ供給するように、構成される。
【0026】
低レベル・デジタル・モータ/発電機コントローラ308は、それぞれ、配電システム114のバス電圧を表す信号を受け取るように結合され、その信号に応答して、モータ・モードまたは発電機モードの何れかで動作するようにモータ/発電機ハードウェア340をコンフィギュレーションするように、構成される。しかし、フライホイール・システム動作中に、アクティブの低レベル・デジタル・モータ/発電機コントローラ308だけがモータ/発電機ハードウェア・コンフィギュレーションを制御することを、理解されたい。低レベル・デジタル・モータ/発電機コントローラ308はまた、主コントローラ102から命令を受け取るように結合され、アクティブのときに、これらの命令に応答してモータ/発電機電力制御命令を生成するようにコンフィギュレーションされる。アクティブの低レベル・デジタル・モータ/発電機コントローラ308によって生成されたモータ/発電機電力制御命令は、それぞれのモータ/発電機電力制御回路318へ与えられる。モータ/発電機電力制御回路318は、それぞれ、アクティブのときに、モータ/発電機ハードウェア340に、従ってフライホイール・アセンブリ310に選択的に電力供給し、その回転加速度を制御するように、構成される。そうするために、低レベル・デジタル・モータ/発電機コントローラ308は、それぞれ、アクティブのときに、モータ制御則または発電機制御則の何れかを選択的に実施するように、構成される。低レベル・デジタル・モータ/発電機コントローラ308およびモータ/発電機電力制御回路318はまた、モータ/発電機ハードウェア340から種々のフィードバック信号も受け取る。フィードバック信号の少なくとも一部は、供給された制御信号に対するモータ/発電機ハードウェア340の応答を表す。アクティブの低レベル・デジタル・モータ/発電機コントローラ308およびアクティブのモータ/発電機パワー・エレクトロニクス回路318はまた、それらがモータ/発電機ハードウェア340から受け取った1または複数のフィードバック信号、ならびにそれら自体の健康状態を表す信号を、主コントローラ102へ供給する。
【0027】
モータ/発電機ハードウェア340は、モータ/発電機342、および1または複数のセンサ344を含む。モータ/発電機342は、現在知られているかまたは将来の多数のモータ/発電機セットのうちの任意の1つでよく、少なくとも主ロータ341およびステータ343を含む。ロータ341は、好ましくは永久磁石ロータとして実施され、フライホイール・アセンブリ310のロータと結合される。ステータ343は、少なくとも主ステータ・コイル345および副ステータ・コイル347を含む。モータ/発電機の主ステータ・コイル345および副ステータ・コイル347は、ジンバル・アクチュエータ334と同様に、また図6および図7に示されるように、互いに径方向または軸方向にずらして配することができる。
【0028】
センサ344は、主温度センサ346および副温度センサ349と、主および副の整流(commutation)センサとを含むことが好ましい。配電システム114のバス電圧が十分に高い場合、アクティブの低レベル・デジタル・モータ/発電機コントローラ308およびアクティブのモータ/発電機電力制御回路318は、モータ・モードでモータ/発電機342を制御する。モータ・モードでの動作中、モータ/発電機342は、フライホイール・アセンブリ310を回転を上げて回転運動エネルギーを蓄積する。逆に、配電システム114のバス電圧がある所定の大きさまで低下した場合には、アクティブの低レベル・デジタル・モータ/発電機コントローラ308およびアクティブのモータ/発電機電力制御回路318は、発電機モードでモータ/発電機342を制御する。発電機モードでのその動作中、モータ/発電機342は、フライホイール・アセンブリ310の回転を下げて、フライホイールに蓄積された回転運動エネルギーを電気エネルギーへと変換する。先に論じたように、フライホイール・アセンブリ310の回転速度の変化は、宇宙機の姿勢に影響を与えうる。従って、モータ・モードでも発電機モードでも、フライホイール・アセンブリ310は、主コントローラ102によって命令された加速度で、ある回転速度まで回転数を上昇または下降させられる。
【0029】
モータ/発電機342がどちらのモードで動作していようとも、主ステータ・コイル345または副ステータ・コイル347が配電システム114に電力を供給またはそこから電力を受け取っている。好ましくは、アクティブの低レベル・デジタル・モータ/発電機コントローラ308およびアクティブのモータ/発電機電力制御回路318が、配電システム114へ電力を供給している、またはそこから電力を受け取っている、特定のステータ・コイル345、347を決定する。詳細には、フライホイール・システム106は、主ステータ・コイル345が通常は配電システム114へ電力を供給するか、またはそこから電力を受け取るように、構成される。しかし、アクティブの低レベル・デジタル・モータ/発電機コントローラ308および/またはアクティブのモータ/発電機電力制御回路318が、モータ/発電機ハードウェア340からのフィードバック信号に少なくとも部分的に基づいて、主ステータ・コイル345が動作不能であると判定した場合には、フライホイール・システム106は、モータ/発電機342を自動的にコンフィギュレーションして、副ステータ・コイル347が配電システム114に電力を供給するように、またはそこから電力を受け取るようにする。
【0030】
低レベル・デジタル磁気軸受コントローラ312は、それぞれ、主コントローラ102から1または複数の命令を受け取り、それに応答して、磁気軸受電力制御命令を生成するように、構成される。しかし、フライホイール・システム動作中、アクティブの低レベル・デジタル磁気軸受コントローラ312だけが磁気軸受電力制御命令を生成することを、理解されたい。アクティブの低レベル・デジタル磁気軸受コントローラ312によって生成された磁気軸受電力命令は、磁気軸受パワー・エレクトロニクス回路322へ与えられる。磁気軸受パワー・エレクトロニクス回路322は、それぞれ、アクティブのときに、磁気軸受電力命令に応答して、磁気軸受ハードウェア350の少なくとも一部に選択的に電力供給するように、構成される。低レベル磁気軸受コントローラ312および磁気軸受パワー・エレクトロニクス回路322はまた、磁気軸受ハードウェア350から種々のフィードバック信号も受け取る。これらのフィードバック信号は、アクティブの低レベル・デジタル・コントローラ314およびアクティブのパワー・エレクトロニクス回路322において、適切な磁気軸受制御のために、および磁気軸受ハードウェア350の動作を判定するために、使用される。アクティブの低レベル・デジタル磁気軸受コントローラ312およびアクティブの磁気軸受パワー・エレクトロニクス回路322はまた、これらのフィードバック信号ならびにそれら自体の健康状態を表す信号を、主コントローラ102へ供給する。
【0031】
磁気軸受ハードウェア350は、エネルギー蓄積フライホイール・アセンブリ310を非接触で回転自在に支持または浮揚させるように機能するものであるとともに、エネルギー蓄積フライホイール・アセンブリ310の主軸受システムになっている。図示の実施形態では、磁気軸受ハードウェア350は能動型磁気軸受を実施し、電磁アクチュエータ352と、例えば主位置センサ357、副位置センサ359、温度センサ、速度センサなどの複数のセンサ354とを含む。位置センサ354は、フライホイール・ロータ(図示せず)の位置を感知し、適切な位置信号を、アクティブの低レベル・デジタル磁気軸受コントローラ312およびアクティブの磁気軸受パワー・エレクトロニクス回路322へ供給する。アクティブの低レベル・デジタル磁気軸受コントローラ312およびアクティブの磁気軸受パワー・エレクトロニクス回路322は、電磁アクチュエータ352への電流供給を制御し、電磁アクチュエータ352は、適切な大きさの電磁力を発生してフライホイール・ロータを適切に配置する。図3に示すシステムでは、能動型磁気軸受が実施されるものとして示されているが、磁気軸受ハードウェア350は、受動型磁気軸受を実施するようにも構成できることを、理解されたい。代替例として、他の種類の軸受アセンブリを使用して、例えば非磁性回転エレメント軸受などのような主軸受アセンブリを実施することもできる。
【0032】
磁気軸受アクチュエータ352は、ジンバル・アクチュエータ334およびモータ/発電機342と同様に、冗長に構成される。詳細には、磁気軸受アクチュエータ352は、主アクチュエータ・コイル353および副アクチュエータ・コイル355の両方を含む。主アクチュエータ・コイル353および副アクチュエータ・コイル355は、それぞれ、アクティブの磁気軸受パワー・エレクトロニクス回路322を介して選択的に電力供給されるように、結合される。アクチュエータ・コイル353、355は、アクティブの低レベル・デジタル磁気軸受コントローラ312およびアクティブの磁気軸受パワー・エレクトロニクス回路322へ供給されるフィードバック信号に少なくとも部分的に基づいて、選択的に電力供給される。より詳細には、例えば、主アクチュエータ・コイル353が通常は選択的に電力供給されるように、構成される。しかし、アクティブの低レベル・デジタル磁気軸受コントローラ312および/またはアクティブの磁気軸受パワー・エレクトロニクス回路322が、磁気軸受ハードウェア350から供給されるフィードバック信号に少なくとも部分的に基づいて、主アクチュエータ・コイル353が動作不能であると判定した場合には、フライホイール・システム106は、それ自体を自動的に再コンフィギュレーションして、副アクチュエータ・コイル355がアクティブの低レベル・デジタル磁気軸受コントローラ312およびアクティブの磁気軸受パワー・エレクトロニクス回路322によって制御され選択的に電力供給されるようにする。図6および図7で更に示すように、磁気軸受アクチュエータの主コイル353および副コイル355は、ジンバル・アクチュエータ334およびモータ/発電機342と同様に、互いに径方向または軸方向の何れかにずらして配することができることを理解されたい。
【0033】
低レベル・デジタル補助軸受コントローラ314は、それぞれ、磁気軸受ハードウェア350の動作を表す種々の信号、および補助軸受ハードウェア360からの種々のフィードバック信号を受け取るように構成される。これらの信号に応答して、アクティブの低レベル・デジタル補助軸受コントローラ314は、補助軸受電力命令を、アクティブの補助軸受電力制御回路324へ与える。詳細には、アクティブの低レベル・デジタル補助軸受コントローラ314は、補助軸受ハードウェア360の位置を表すフィードバック信号を受け取り、更に配電システム114のバス電圧を表す信号も受け取ることができる。これらの信号に応答して、アクティブの低レベル・デジタル補助軸受コントローラ314は、補助軸受電力命令を、アクティブの補助軸受電力制御回路324へ与える。補助軸受電力制御回路324は、それぞれ、アクティブのときに、その補助軸受電力命令に応答して補助軸受ハードウェア360の少なくとも一部に選択的に電力供給するように構成される。
【0034】
補助軸受ハードウェア360は、磁気軸受ハードウェア350が動作不能であるかまたは適切に動作できない場合に、エネルギー蓄積フライホイール・アセンブリ310を回転自在に支持するために使用される。補助軸受ハードウェア360は、アクチュエータ・アセンブリ362、1または複数の補助(または副)軸受アセンブリ364、主位置センサ367、副位置センサ366、およびブレーキ・アセンブリ368を含む。アクチュエータ・アセンブリ362は、適切に電力供給されたことに応じて、補助軸受アセンブリ364を係合(engage)位置または非係合(disengage)位置の何れかに移動させる。補助軸受アセンブリ364の通常の位置である非係合位置では、補助軸受アセンブリ364はフライホイール・アセンブリ310と係合されておらず、回転自在に支持しない。正確に言えば、フライホイール・アセンブリ310は、磁気軸受ハードウェア350によって回転自在に支持される。逆に係合位置では、補助軸受アセンブリ364はフライホイール・アセンブリ310と係合し、回転自在に支持する。
【0035】
補助軸受アクチュエータ・アセンブリ362は、ジンバル・アクチュエータ334、モータ/発電機342および磁気軸受アクチュエータ352と同様に、適切な冗長性を備えて構成される。詳細には、補助軸受アクチュエータ・アセンブリ362は、好ましくは電気機械アクチュエータとして実施され、少なくとも主駆動コイル363および副駆動コイル365を含む。主駆動コイル363および副駆動コイル365は、それぞれ、選択的に電力供給されるように結合される。駆動コイル363、365は、アクティブの低レベル・デジタル補助軸受コントローラ314およびアクティブの補助軸受電力制御回路324へ供給されるフィードバック信号に少なくとも部分的に基づいて、選択的に電力供給される。より詳細には、例えば、主駆動コイル363が通常は選択的に電力供給されるように構成される。しかし、アクティブの低レベル・デジタル補助軸受コントローラ314および/またはアクティブの補助軸受電力制御回路324が、補助軸受ハードウェア360から供給されるフィードバック信号に少なくとも部分的に基づいて、主駆動コイル363が動作不能であると判定した場合には、フライホイール・システム106は、それ自体を自動的に再コンフィギュレーションして、副駆動コイル365がアクティブの低レベル・デジタル補助軸受コントローラ314およびアクティブの補助軸受電力制御回路324よって制御され選択的に電力供給されるようにする。
【0036】
補助軸受アクチュエータ・アセンブリ362は、多数の構成のうちの任意の1つによって実施できることを理解されたい。例えば、補助軸受アクチュエータ・アセンブリ362は、ジンバル・アクチュエータ334と同様に、主駆動コイル363も副駆動コイル365も1つのロータ327と関連するように、実施することができる。更に、図6および図7に示されるように、駆動コイル363、365は、互いに径方向または軸方向の何れかにずらして配することができ、あるいは図8に示されるように、駆動コイル363、365のそれぞれは、それ自体の個別ロータ327、329と関連付けさせることもできる。
【0037】
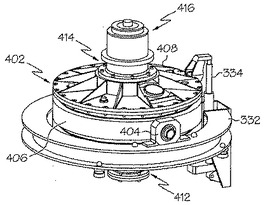
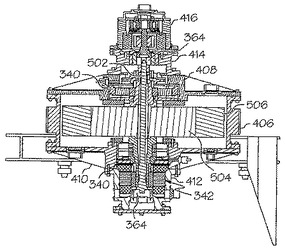
完全を期するために、次に、図4および図5を参照されたい。これらの図は、エネルギー蓄積フライホイール・システム106の例示的な物理的実施形態を示す。これらの図に示されるように、例示的なフライホイール・システム106は、好ましくはハウジング・アセンブリ402を含み、これは、2つのジンバル軸受404(1つのみ図示)を介してジンバル・フレーム332内に回転自在に取り付けられる。1つのジンバル・アクチュエータ334がジンバル・フレーム332に取り付けられ、前述のように、ハウジング・アセンブリ402を適切な角速度に配置するように制御され選択的に電力供給され(図4および図5には示さず)、それによって姿勢制御が行われる。
【0038】
ハウジング・アセンブリ402は、中央部分406、2つの端部408および410、モータ/発電機ハウジング412、補助軸受ハウジング414、および補助モータ・ハウジング416を含む。ハウジング・アセンブリ402は、一緒に結合された多数の部分から構成されるものとして示されているが、一体化構造として形成できることも理解されたい。何にしても、モータ/発電機ハウジング412はハウジング・アセンブリの第2の端部410に結合され、補助軸受ハウジング414はハウジング・アセンブリの第1の端部408に結合され、補助モータ・ハウジング416は補助軸受ハウジング414に結合される。
【0039】
モータ/発電機342のステータは、モータ/発電機ハウジング412に取り付けられ、モータ/発電機342のロータは、フライホイール・アセンブリ310に結合される。フライホイール・アセンブリ310は、より詳細に図5に示されるように、シャフト・アセンブリ502、ハブ504、およびフライホイール・リム506を含む。シャフト・アセンブリ502は、2組の磁気軸受ハードウェア340または2つの補助軸受アセンブリ364の何れかを介して、ハウジング・アセンブリ402に回転自在に取り付けられる。ハブ504は、好ましくは高強度の合金でできており、シャフト・アセンブリ502に取り付けられる。ハブ504は、例えば、中実構造、スポーク型構造、それらの組合せなどを含む多数の構造のうちの任意の1つの形で作製されてよい。フライホイール・リム506は、ハブ504に取り付けられてハブ504を囲み、例えば、フィラメントを巻線いた炭素繊維などのような強度対密度比が高い材料でできていることが好ましい。
【0040】
以上、本発明を好ましい実施形態に関して説明してきたが、当業者には理解されるように、本発明の範囲から逸脱することなく、種々の変更を加えることができ、また本発明の要素の代わりに等価物を代用することもできる。加えて、本発明の本質的な範囲から逸脱することなく、特定の状況または材料に適合するように多くの改変を本発明の教示に対して加えることができる。従って、本発明は、本発明を実施するために企図された最良の形態として開示された特定の実施形態に限定されるものではなく、特許請求の範囲に入るすべての実施形態を含むものである。
【図面の簡単な説明】
【0041】
【図1】図1は、例示的な一体化された電力および姿勢制御システムの簡略構成図である。
【図2】図2は、図1のシステムを含むことができる宇宙機の例示的な物理的実施形態の平面図である。
【図3】図3は、図1のシステムに使用できる1つのエネルギー蓄積フライホイール・システムの例示的実施形態の機能ブロック図である。
【図4】図4は、図3のエネルギー蓄積フライホイール・システムの物理的実施形態の平面図である。
【図5】図5は、図3のエネルギー蓄積フライホイール・システムの物理的実施形態の断面図である。
【図6】図6は、図3のエネルギー蓄積フライホイール・システムにおける冗長性を実現するための構成を示す。
【図7】図7は、図3のエネルギー蓄積フライホイール・システムにおける冗長性を実現するための構成を示す。
【図8】図8は、図3のエネルギー蓄積フライホイール・システムにおける冗長性を実現するための構成を示す。
【技術分野】
【0001】
本発明は、エネルギー蓄積フライホイール・システムに関し、より詳細には、宇宙機の電力および姿勢制御用の電子冗長エネルギー蓄積フライホイール・システム制御システムに関する。
【背景技術】
【0002】
米国政府により支援された研究または開発に関する表明
本発明は、空軍研究所(Air Force Research Laboratory)から授与された契約第F29601−01−2−0046号のもとに政府に援助されてなされたものである。政府は、本発明の一定の権利を有する。
【0003】
多くの人工衛星および他の宇宙機、ならびに一部の地上の定置応用例、および外洋船などのビークル(vehicle、運送手段)応用例では、その運送手段にバックアップ電源を提供するため、および姿勢制御を行うために、1または複数のエネルギー蓄積フライホイール・システムを備えることがある。このようなシステムでは、各フライホイール・システムは、運送手段の配電システムの電力需要のバランスをとるように制御および調整され、また、プログラムされた命令、または運送手段内の主コントローラによって受信された遠隔からの姿勢(またはトルク)命令に応答して制御されることができる。
【0004】
多くのエネルギー蓄積フライホイール・システムは、ハウジング・アセンブリ内に回転自在に支持された1または複数の構成要素を含む。回転群と呼ばれることもあるこれらの構成要素は、例えばエネルギー蓄積フライホイール、モータ/発電機、およびシャフトを含む。詳細には、エネルギー蓄積フライホイールおよびモータ/発電機はシャフトに取り付けられ、このシャフトは、1または複数の軸受アセンブリによってハウジング・アセンブリ内で回転自在に支持される。多くの場合、シャフトは、1または複数の主軸受(primary bearing)アセンブリと、1または複数の副軸受(secondary bearing)(バックアップ軸受)アセンブリとを使用して、回転自在に支持される。例えば、多くの人工衛星および宇宙機の応用例において、フライホイール・システムは、主軸受アセンブリとして機能する1または複数の磁気軸受アセンブリと、副軸受アセンブリとして機能する1または複数の機械式軸受アセンブリとを含むことがある。一般には、主軸受アセンブリは、回転群を回転自在に支持するために使用され、副軸受アセンブリは、その回転群とは係合されていない。1または複数の主軸受アセンブリが、例えば機能不良のために作動しなくなったり、それとは別の理由で回転群を回転自在に支持するように動作できなくなった場合、副軸受アセンブリが係合し、それによって回転群を回転自在に支持する。
【0005】
1または複数の上述の構成要素、および/またはこれらの構成要素に付随する電気・電子制御システムは、エネルギー蓄積フライホイール・システム動作中に動作不能になりうることが考えられ得る。このような場合、エネルギー蓄積フライホイール・システム全体が動作不能になることがある。従って、システムが運用不能になる可能性を低減させるために、エネルギー蓄積フライホイール・システム内に十分な冗長性を与えることが、とりわけ宇宙応用例では、望ましい。残念ながら、デュアル・モータ/発電機、および/またはデュアル主軸受、および/またはデュアル電気・電子制御システムなどのようなほとんどの冗長方式は、望ましくないことに、システム全体の重量を増加させる。
【発明の開示】
【発明が解決しようとする課題】
【0006】
従って、電気的にも電子的にも冗長でありながら、システム全体および宇宙機の重量を大幅には増加させないようなエネルギー蓄積フライホイール・システムが、宇宙機応用例では必要とされている。本発明は、少なくともこの必要性に応じるものである。
【課題を解決するための手段】
【0007】
本発明は、宇宙機(spacecraft)の電力および姿勢制御用の電子冗長エネルギー蓄積フライホイール・システム(electronically redundant energy storage flywheel system)を提供する。一実施形態では、例示的なものにすぎないが、エネルギー蓄積フライホイール・システムはシャフト、フライホイール・アセンブリ、複数の磁気軸受、モータ/発電機、およびフライホイール制御モジュールを含む。フライホイール・アセンブリは、シャフトに取り付けられる。それぞれの磁気軸受アセンブリは、一次(主)アクチュエータ・コイルおよび二次(副)アクチュエータ・コイルを含み、各アクチュエータ・コイルは、選択的に電力供給(通電)および電力遮断されるように適合され、通電されているときにフライホイール・アセンブリを非接触様式で回転自在に取り付けるように構成される。モータ/発電機は、エネルギー蓄積フライホイールに結合され、モータ・モードまたは発電機モードの何れかで動作するように構成される。モータ/発電機は、ロータおよびステータを含み、ステータは、一次(主)ステータ・コイルおよび二次(副)ステータ・コイルを含む。フライホイール制御モジュールは、少なくとも磁気軸受アセンブリおよびモータ/発電機を制御するように構成され、多チャネル処理モジュールおよび多チャネル電力制御モジュールを含む。この多チャネル処理モジュールは、少なくとも一次(主)処理チャネルおよび二次(副)処理チャネルを含む。それぞれの処理チャネルは、少なくとも磁気軸受アセンブリ電力制御命令およびモータ/発電機電力制御命令を選択的に与えるように構成される。多チャネル電力制御モジュールは、多チャネル処理モジュールと通信し、少なくとも一次(主)電力制御チャネルおよび二次(副)電力制御チャネルを含む。それぞれの電力制御チャネルは、少なくとも磁気軸受電力制御命令およびモータ/発電機電力制御命令を受け取るように結合され、それらを受け取ると、それぞれの磁気軸受アセンブリの主アクチュエータ・コイルまたは副アクチュエータ・コイルの何れかに選択的に磁気軸受作動電力を供給するように動作し、また、主ステータ・コイル組または副ステータ・コイル組の何れかに選択的に電力を供給するように又はそれらの何れからから電力を引き出すように動作する。
【0008】
好ましいエネルギー蓄積フライホイール制御システムの他の個別の特徴および利点は、本発明の原理を例示的に示す添付の図面と併せて以下の詳細な説明により、明らかになるであろう。
【発明を実施するための最良の形態】
【0009】
詳細な説明に移る前に、説明する実施形態は宇宙機と組み合わせた使用に限定されないことを、理解されたい。即ち、本実施形態は、説明の便宜上、人工衛星で実施されるものとして示し説明するが、地球上でも地球外でも、他のシステムおよび環境においても実施できることを理解されたい。
【0010】
次に説明に移る。図1を参照すると、宇宙機用の例示的な一体化された電力および姿勢制御システム100の機能ブロック図が示されている。システム100は、主コントローラ102、主電源104、および複数のフライホイール・システム106(106−1、106−2、106−3、・・・106−N)を含む。システム100を使用できる宇宙機200の例示的な物理的実施形態の平面図が、図2に示されている。
【0011】
主コントローラ102は、例えば地上局または搭載したオートパイロット108から姿勢命令(またはトルク命令)を受け取り、配電システム114を監視し、フライホイール・システム106の動作を適切に制御する。トルク命令に応答して、フライホイール・システム106は、適切な姿勢外乱を宇宙機に誘発するように制御され、それによって宇宙機の姿勢を制御する。加えて、配電システム114の状態に応じて、フライホイール・システム106は、配電システムへ電気エネルギーを供給するように、あるいは配電システムから電気エネルギーを引き出すように、制御される。1または複数の姿勢センサ110や1または複数のレート(rate、速度)センサ112などのような、1または複数の宇宙機のダイナミック・センサが、宇宙機の姿勢および姿勢変化率をそれぞれ感知し、それらを表すフィードバック信号を主コントローラ102へ供給する。主コントローラ102と、それが電力および姿勢を制御するために実施する処理との詳細な説明は、請求の範囲に記載されている本発明を可能にするため又は説明するために必要なものではないので、行わない。
【0012】
主電源104は、その名が暗示するように、配電システム114への電力の主要な供給源である。システム100が宇宙機で実施される図示の実施形態では、主電源104は、1または複数の太陽電池パネルであり、それぞれが、光エネルギーを電気エネルギーに変換するための太陽電池のアレイを含む。太陽電池パネル104は、宇宙機自体に取り付けることができ、あるいは、宇宙機から延びる固定または可動の構造体に取り付けることもできる。宇宙機200が、例えば地球の陰に入るなどのような、日光を受けない位置にあるときには、バックアップ電源が必要になる。上記で暗に示したように、姿勢制御を実現することに加えて、フライホイール・システム106はまた、バックアップ電源としても機能する。フライホイール・システム106はまた、電気的負荷に必要とされる電力が主電源104の能力を超えた場合に、電力を供給することもできる。バッテリ115(図1に透視図的に示す)などのような他のバックアップ電源を設けてもよいことを、理解されたい。
【0013】
システム100は、N個のエネルギー蓄積フライホイール・システム106(106−1、106−2、106−3、・・・1−6−N)を含む。システム100は、好ましくは、幾つかのフライホイール・システム106がアクティブであり、残りのうちの1または複数のフライホイール・システム106がスタンバイの非アクティブ化状態にあるように構成される。従って、システム100は、少なくとも単一故障耐性(single fault tolerant)である。アクティブであるフライホイール・システム106の数は、システム要件に応じて変わりうる。特定の好ましい実施形態では、4個のフライホイール・システム106がアクティブであり、残りが非アクティブである。
【0014】
フライホイール・システム106のそれぞれは、フライホイール制御モジュール116(116−1、116−2、116−3、・・・116−N)、およびフライホイール・ハードウェア118(118−1、118−2、118−3、・・・118−N)を含む。フライホイール制御モジュール116は、それぞれ、主コントローラ102と通信し、少なくとも図示の実施形態では、データ・バス111を介して互いに通信する。主コントローラ102は、上記のように、各フライホイール制御モジュール116へ姿勢制御命令を与える。次に、フライホイール制御モジュール116は、関連するフライホイール・ハードウェア118の相対的な姿勢および角速度を制御して、宇宙機200の姿勢制御を行う。フライホイール制御モジュール116はまた、主コントローラ102からの命令に応答して、関連するフライホイール・ハードウェア118の動作を、モータ・モードまたは発電機モードの何れかで制御し、また、関連するフライホイール・ハードウェア118の回転加速度を各モードで制御する。フライホイール制御モジュール116はまた、好ましくは、関連するフライホイール・ハードウェア118の種々のパラメータを監視し、表示信号を主コントローラ102へ供給する。1つのフライホイール・システム106の例示的な実施形態のブロック図が図3に示されており、それについて次に詳細に論じる。
【0015】
図示の実施形態では、フライホイール制御モジュール116のそれぞれは、多チャネル処理モジュール302、および多チャネル・パワー・エレクトロニクス・モジュール304を含む。フライホイール・ハードウェア118は、エネルギー蓄積フライホイール・アセンブリ310、ジンバル・ハードウェア330、モータ/発電機ハードウェア340、磁気軸受ハードウェア350、および補助軸受ハードウェア360を含む。これらのフライホイール制御モジュール116およびフライホイール・ハードウェア118の上記部分のそれぞれの特定の好ましい実施形態を、より詳細に次に説明する。
【0016】
多チャネル処理モジュール302は、複数の個別の処理チャネル303を用いて実施される。図示の実施形態では、多チャネル処理モジュール302および多チャネル電力制御モジュール304は、それぞれ、2つの個別チャネルで実施されている。より詳細には、多チャネル処理モジュール302は、主処理チャネル303−1および副処理チャネル303−2を用いて実施され、多チャネル電力制御モジュール304は、主電力制御チャネル305−1および副電力制御チャネル305−2を用いて実施される。しかし、多チャネル処理モジュール302および多チャネル電力制御モジュール304の何れかまたは両方が、必要に応じてまたは要望に応じて、2つより多くの個別チャネル(例えば、それぞれ303−1、303−2、・・・303−N、および305−1、305−2、・・・305−N)を用いて実施されてもよいことを、理解されたい。以下で更に説明するように、各モジュール302、304のチャネル303、305のうちの1つの少なくとも一部がアクティブ・モードで動作して、フライホイール・ハードウェア118の動作を制御し、他のチャネル(場合により複数のチャネル)303、305の少なくとも一部がスタンバイ・モードで動作しており、それによって、フライホイール・システム106の適切な電気的および電子的な冗長性が実現される。
【0017】
処理チャネル303は、それぞれ、複数の低レベル・デジタル・コントローラ、即ち、低レベル・デジタル・ジンバル・コントローラ306、低レベルモータ/発電機コントローラ308、低レベル磁気軸受コントローラ312、および低レベル補助軸受コントローラ314を実施するように構成される。同様に、それぞれの電力制御チャネル305は、複数のパワー・エレクトロニクス回路、即ち、ジンバル・パワー・エレクトロニクス回路316、モータ/発電機パワー・エレクトロニクス回路318、磁気軸受パワー・エレクトロニクス回路322、および補助軸受パワー・エレクトロニクス回路324を実施するように構成される。それぞれの処理チャネル303は、多数の技法のうちの任意の1つによって、図示の低レベル・デジタル・コントローラ306〜314を実施するように構成できることを、理解されたい。例えば、それぞれの処理チャネル303は、プログラマブル・プロセッサまたはデジタル信号プロセッサなどの1つの信号処理デバイスが4つすべての低レベル・デジタル・コントローラ306〜314を実施するように、構成することもできる。代替例として、それぞれの処理チャネル303は、4つの別々の処理デバイスを用いて構成することもでき、各処理デバイスが、低レベル・デジタル・コントローラ306〜312のうちの1つを実施するようにする。同様に、それぞれの電力制御チャネル305もまた、多数の技法のうちの任意の1つによって、図示のパワー・エレクトロニクス回路316〜324を実施できることを理解されたい。しかし、それぞれの電力制御チャネル305は、4つの別々のパワー・エレクトロニクス回路316〜324を用いて構成されることが好ましい。
【0018】
上記で暗に示したように、処理モジュール302およびパワー・エレクトロニクス・モジュール304は、そのフライホイール・システム106の適切な冗長性を実現するように更に構成される。処理モジュール302およびパワー・エレクトロニクス・モジュール304がこの冗長性を実現する方法は多様であってよいことを、理解されたい。例えば、図示の実施形態における処理モジュール302は、主処理チャネル303−1などのような1つの処理チャネルがアクティブ・モードであり、副処理チャネル303−2などのような他の処理チャネルがスタンバイ・モードであるように、構成することができる。この構成では、主処理チャネル303−1のすべての低レベル・デジタル・コントローラ306〜314と、副処理チャネル303−2のすべての低レベル・デジタル・コントローラ306〜314とは、何れかがアクティブ・モードまたはスタンバイ・モードになる。より詳細には、主処理チャネル306〜314内のすべての低レベル・デジタル・コントローラ306〜314がアクティブ・モードである場合、副処理チャネル303−2内のすべての低レベル・デジタル・コントローラ306〜314はスタンバイ・モードになる。しかし、主処理チャネル303−1の低レベル・デジタル・コントローラ306〜314のうちの1または複数のものが故障しているか動作不能であると主コントローラ102が判定した場合、主コントローラ102は、処理回路302に命令して、主処理チャネル303−1のすべての低レベル・デジタル・コントローラ306〜314をスタンバイ・モードに切り換え、副処理チャネル303−2のすべての低レベル・デジタル・コントローラ306〜314をアクティブ・モードに切り換えるようにする。
【0019】
別の実施形態では、それぞれの処理チャネル303のすべての低レベル・デジタル・コントローラ306〜314が常に同じモードであるとは限らない。例えば、主処理チャネル303−1のすべての低レベル・デジタル・コントローラ306〜314が最初はアクティブ・モードであり、副処理チャネル303−2のすべての低レベル・デジタル・コントローラ306〜314が最初はスタンバイ・モードであり、主コントローラが、例えば、アクティブの低レベル・デジタル・ジンバル・コントローラ306が故障しているか動作不能であると判定するものとする。この代替の実施形態では、処理回路302は、主処理チャネル303−1の低レベル・デジタル・ジンバル・コントローラ306だけをスタンバイ・モードに切り換え、副処理チャネル303−2の低レベル・デジタル・ジンバル・コントローラ306だけをアクティブ・モードに切り換えるように、命令される。主処理チャネル303−1および副処理チャネル303−2の両方の他のすべての低レベル・デジタル・・ジンバル・コントローラ308〜314は、最初のアクティブ状態またはスタンバイ状態にとどまる。
【0020】
パワー・エレクトロニクス・モジュール304は、上述の冗長性を実現する方法の何れかによって同様に構成できることを理解されたい。つまり、パワー・エレクトロニクス・モジュール304は、それぞれの電力制御チャネル305のすべてのパワー・エレクトロニクス回路316〜324が常に同じモードであるように、あるいはそれぞれの電力制御チャネル305のパワー・エレクトロニクス回路316〜324を、必要または要望に応じて、異なるモードにできるように、構成することができる。完璧を期するために、それぞれの低レベル・デジタル・コントローラ306〜314、それぞれのパワー・エレクトロニクス回路316〜324、および関連するフライホイール・ハードウェア118の機能を簡潔に説明する。
【0021】
低レベル・デジタル・ジンバル・コントローラ306は、それぞれ、主コントローラ102からジンバル角速度命令を受け取り、それに応答して、適切なジンバル電力制御命令を発生するように構成される。しかし、フライホイール・システムの動作中に、アクティブの低レベル・デジタル・ジンバル・コントローラ306だけがジンバル電力命令を生成することを理解されたい。アクティブの低レベル・デジタル・ジンバル・コントローラ306によって生成されたジンバル電力命令は、ジンバル・パワー・エレクトロニクス回路316へ与えられる。ジンバル・パワー・エレクトロニクス回路316は、それぞれ、アクティブのときに、ジンバル電力命令に応答するように構成され、ジンバル・ハードウェア330の少なくとも一部に選択的に電力を与える(以下で更に説明)。低レベル・ジンバル・コントローラ306およびジンバル・パワー・エレクトロニクス回路316はまた、ジンバル・ハードウェア330から種々のフィードバック信号も受け取る。これらのフィードバック信号は、アクティブの低レベル・デジタル・ジンバル・コントローラ306内、およびアクティブのパワー・エレクトロニクス回路316で、姿勢制御を行うため、およびジンバル・ハードウェア330の動作性を判定するために、使用される。アクティブの低レベル・デジタル・ジンバル・コントローラ306、およびアクティブのジンバル・パワー・エレクトロニクス回路316はまた、これらのフィードバック信号、ならびにそれら自体の健康状態を表す信号を、主コントローラ102へ供給する。
【0022】
図示の実施形態では、ジンバル・ハードウェア330は、1または複数のジンバル・フレーム332、1または複数のアクチュエータ334、および1または複数のジンバル・センサ336を含む。フライホイール・アセンブリ310は、ジンバル・フレーム332においてジンバル軸について回転自在に取り付けられる。このジンバル軸は、エネルギー蓄積フライホイール・アセンブリ310のスピン軸に対して垂直である。ジンバル・アクチュエータ334は、ジンバル・フレーム332に結合され、また、配電システム114と多チャネルパワー・エレクトロニクス・モジュール304との間に結合される。ジンバル・アクチュエータ334は、好ましくは、電気機械アクチュエータとして実施され、少なくとも主駆動コイル333および副駆動コイル335を含む。主駆動コイル333および副駆動コイル335は、それぞれ、選択的に電力供給されるように結合され、電力供給されると動作して、ジンバル・アクチュエータ334がフライホイール・アセンブリ310をジンバル・フレーム332に対して動かすようにさせる。
【0023】
駆動コイル333、335は、アクティブの低レベル・デジタル・ジンバル・コントローラ306およびアクティブのジンバル・パワー・エレクトロニクス回路316へ供給されるフィードバック信号に少なくとも部分的に基づいて、選択的に電力供給される。より詳細には、例えば、主駆動コイル333は、通常は選択的に電力供給されるように構成される。しかし、アクティブの低レベル・デジタル・ジンバル・コントローラ306および/またはアクティブのジンバル・パワー・エレクトロニクス回路316が、ジンバル・ハードウェア330から供給されるフィードバック信号に少なくと部分的に基づいて、主駆動コイル333が動作不能と判定した場合には、フライホイール・システム106は、それ自体を自動的に再コンフィギュレーションして、アクティブの低レベル・デジタル・ジンバル・コントローラ306およびアクティブのジンバル・パワー・エレクトロニクス回路316のそれぞれにより副駆動コイル335が制御され選択的に電力供給されるようにする。
【0024】
ジンバル・アクチュエータ334は、多数の構成のうちの任意の1つによって実施できることを理解されたい。例えば、ジンバル・アクチュエータ334は、主駆動コイル333も副駆動コイル335も1つのロータ337に関連するように、実施することができる。このような場合では、図6および図7に示されるように、駆動コイル333、335は互いに径方向または軸方向の何れかにずらして配することができる。代替例として、図8に示されるように、ジンバル・アクチュエータ334は、それぞれの駆動コイル333、335がそれ自体の個別のロータ337、339に関連するように、実施することもできる。
【0025】
一般に知られているように、宇宙機での姿勢制御は、特定の速度(例えば角速度)でジンバル角度を変化させることによって、実施することができる。即ち、主コントローラ102から受け取った命令に応答して、アクティブのジンバル・コントローラ306は、適切なジンバル・アクチュエータ電力制御命令をアクティブのジンバル・アクチュエータ・パワー・エレクトロニクス回路316へ与え、この回路は、配電システム114を介して、ジンバル・アクチュエータの主コイル333または副コイル335の何れかへ選択的に電力供給する。それに応じて、ジンバル・アクチュエータ334は、フライホイール・アセンブリ310を、ジンバル・フレーム332に対して、適切な角速度で、適切に配置する。好ましくは1または複数の主センサ331および1または複数の副センサ339を含むジンバル・センサ336は、ジンバル・フレーム332に対するフライホイール・アセンブリ310の少なくとも位置および速度を感知し、位置および速度のフィードバック信号をアクティブの低レベル・デジタル・ジンバル・コントローラ306およびアクティブのジンバル・パワー・エレクトロニクス回路316へ供給するように、構成される。
【0026】
低レベル・デジタル・モータ/発電機コントローラ308は、それぞれ、配電システム114のバス電圧を表す信号を受け取るように結合され、その信号に応答して、モータ・モードまたは発電機モードの何れかで動作するようにモータ/発電機ハードウェア340をコンフィギュレーションするように、構成される。しかし、フライホイール・システム動作中に、アクティブの低レベル・デジタル・モータ/発電機コントローラ308だけがモータ/発電機ハードウェア・コンフィギュレーションを制御することを、理解されたい。低レベル・デジタル・モータ/発電機コントローラ308はまた、主コントローラ102から命令を受け取るように結合され、アクティブのときに、これらの命令に応答してモータ/発電機電力制御命令を生成するようにコンフィギュレーションされる。アクティブの低レベル・デジタル・モータ/発電機コントローラ308によって生成されたモータ/発電機電力制御命令は、それぞれのモータ/発電機電力制御回路318へ与えられる。モータ/発電機電力制御回路318は、それぞれ、アクティブのときに、モータ/発電機ハードウェア340に、従ってフライホイール・アセンブリ310に選択的に電力供給し、その回転加速度を制御するように、構成される。そうするために、低レベル・デジタル・モータ/発電機コントローラ308は、それぞれ、アクティブのときに、モータ制御則または発電機制御則の何れかを選択的に実施するように、構成される。低レベル・デジタル・モータ/発電機コントローラ308およびモータ/発電機電力制御回路318はまた、モータ/発電機ハードウェア340から種々のフィードバック信号も受け取る。フィードバック信号の少なくとも一部は、供給された制御信号に対するモータ/発電機ハードウェア340の応答を表す。アクティブの低レベル・デジタル・モータ/発電機コントローラ308およびアクティブのモータ/発電機パワー・エレクトロニクス回路318はまた、それらがモータ/発電機ハードウェア340から受け取った1または複数のフィードバック信号、ならびにそれら自体の健康状態を表す信号を、主コントローラ102へ供給する。
【0027】
モータ/発電機ハードウェア340は、モータ/発電機342、および1または複数のセンサ344を含む。モータ/発電機342は、現在知られているかまたは将来の多数のモータ/発電機セットのうちの任意の1つでよく、少なくとも主ロータ341およびステータ343を含む。ロータ341は、好ましくは永久磁石ロータとして実施され、フライホイール・アセンブリ310のロータと結合される。ステータ343は、少なくとも主ステータ・コイル345および副ステータ・コイル347を含む。モータ/発電機の主ステータ・コイル345および副ステータ・コイル347は、ジンバル・アクチュエータ334と同様に、また図6および図7に示されるように、互いに径方向または軸方向にずらして配することができる。
【0028】
センサ344は、主温度センサ346および副温度センサ349と、主および副の整流(commutation)センサとを含むことが好ましい。配電システム114のバス電圧が十分に高い場合、アクティブの低レベル・デジタル・モータ/発電機コントローラ308およびアクティブのモータ/発電機電力制御回路318は、モータ・モードでモータ/発電機342を制御する。モータ・モードでの動作中、モータ/発電機342は、フライホイール・アセンブリ310を回転を上げて回転運動エネルギーを蓄積する。逆に、配電システム114のバス電圧がある所定の大きさまで低下した場合には、アクティブの低レベル・デジタル・モータ/発電機コントローラ308およびアクティブのモータ/発電機電力制御回路318は、発電機モードでモータ/発電機342を制御する。発電機モードでのその動作中、モータ/発電機342は、フライホイール・アセンブリ310の回転を下げて、フライホイールに蓄積された回転運動エネルギーを電気エネルギーへと変換する。先に論じたように、フライホイール・アセンブリ310の回転速度の変化は、宇宙機の姿勢に影響を与えうる。従って、モータ・モードでも発電機モードでも、フライホイール・アセンブリ310は、主コントローラ102によって命令された加速度で、ある回転速度まで回転数を上昇または下降させられる。
【0029】
モータ/発電機342がどちらのモードで動作していようとも、主ステータ・コイル345または副ステータ・コイル347が配電システム114に電力を供給またはそこから電力を受け取っている。好ましくは、アクティブの低レベル・デジタル・モータ/発電機コントローラ308およびアクティブのモータ/発電機電力制御回路318が、配電システム114へ電力を供給している、またはそこから電力を受け取っている、特定のステータ・コイル345、347を決定する。詳細には、フライホイール・システム106は、主ステータ・コイル345が通常は配電システム114へ電力を供給するか、またはそこから電力を受け取るように、構成される。しかし、アクティブの低レベル・デジタル・モータ/発電機コントローラ308および/またはアクティブのモータ/発電機電力制御回路318が、モータ/発電機ハードウェア340からのフィードバック信号に少なくとも部分的に基づいて、主ステータ・コイル345が動作不能であると判定した場合には、フライホイール・システム106は、モータ/発電機342を自動的にコンフィギュレーションして、副ステータ・コイル347が配電システム114に電力を供給するように、またはそこから電力を受け取るようにする。
【0030】
低レベル・デジタル磁気軸受コントローラ312は、それぞれ、主コントローラ102から1または複数の命令を受け取り、それに応答して、磁気軸受電力制御命令を生成するように、構成される。しかし、フライホイール・システム動作中、アクティブの低レベル・デジタル磁気軸受コントローラ312だけが磁気軸受電力制御命令を生成することを、理解されたい。アクティブの低レベル・デジタル磁気軸受コントローラ312によって生成された磁気軸受電力命令は、磁気軸受パワー・エレクトロニクス回路322へ与えられる。磁気軸受パワー・エレクトロニクス回路322は、それぞれ、アクティブのときに、磁気軸受電力命令に応答して、磁気軸受ハードウェア350の少なくとも一部に選択的に電力供給するように、構成される。低レベル磁気軸受コントローラ312および磁気軸受パワー・エレクトロニクス回路322はまた、磁気軸受ハードウェア350から種々のフィードバック信号も受け取る。これらのフィードバック信号は、アクティブの低レベル・デジタル・コントローラ314およびアクティブのパワー・エレクトロニクス回路322において、適切な磁気軸受制御のために、および磁気軸受ハードウェア350の動作を判定するために、使用される。アクティブの低レベル・デジタル磁気軸受コントローラ312およびアクティブの磁気軸受パワー・エレクトロニクス回路322はまた、これらのフィードバック信号ならびにそれら自体の健康状態を表す信号を、主コントローラ102へ供給する。
【0031】
磁気軸受ハードウェア350は、エネルギー蓄積フライホイール・アセンブリ310を非接触で回転自在に支持または浮揚させるように機能するものであるとともに、エネルギー蓄積フライホイール・アセンブリ310の主軸受システムになっている。図示の実施形態では、磁気軸受ハードウェア350は能動型磁気軸受を実施し、電磁アクチュエータ352と、例えば主位置センサ357、副位置センサ359、温度センサ、速度センサなどの複数のセンサ354とを含む。位置センサ354は、フライホイール・ロータ(図示せず)の位置を感知し、適切な位置信号を、アクティブの低レベル・デジタル磁気軸受コントローラ312およびアクティブの磁気軸受パワー・エレクトロニクス回路322へ供給する。アクティブの低レベル・デジタル磁気軸受コントローラ312およびアクティブの磁気軸受パワー・エレクトロニクス回路322は、電磁アクチュエータ352への電流供給を制御し、電磁アクチュエータ352は、適切な大きさの電磁力を発生してフライホイール・ロータを適切に配置する。図3に示すシステムでは、能動型磁気軸受が実施されるものとして示されているが、磁気軸受ハードウェア350は、受動型磁気軸受を実施するようにも構成できることを、理解されたい。代替例として、他の種類の軸受アセンブリを使用して、例えば非磁性回転エレメント軸受などのような主軸受アセンブリを実施することもできる。
【0032】
磁気軸受アクチュエータ352は、ジンバル・アクチュエータ334およびモータ/発電機342と同様に、冗長に構成される。詳細には、磁気軸受アクチュエータ352は、主アクチュエータ・コイル353および副アクチュエータ・コイル355の両方を含む。主アクチュエータ・コイル353および副アクチュエータ・コイル355は、それぞれ、アクティブの磁気軸受パワー・エレクトロニクス回路322を介して選択的に電力供給されるように、結合される。アクチュエータ・コイル353、355は、アクティブの低レベル・デジタル磁気軸受コントローラ312およびアクティブの磁気軸受パワー・エレクトロニクス回路322へ供給されるフィードバック信号に少なくとも部分的に基づいて、選択的に電力供給される。より詳細には、例えば、主アクチュエータ・コイル353が通常は選択的に電力供給されるように、構成される。しかし、アクティブの低レベル・デジタル磁気軸受コントローラ312および/またはアクティブの磁気軸受パワー・エレクトロニクス回路322が、磁気軸受ハードウェア350から供給されるフィードバック信号に少なくとも部分的に基づいて、主アクチュエータ・コイル353が動作不能であると判定した場合には、フライホイール・システム106は、それ自体を自動的に再コンフィギュレーションして、副アクチュエータ・コイル355がアクティブの低レベル・デジタル磁気軸受コントローラ312およびアクティブの磁気軸受パワー・エレクトロニクス回路322によって制御され選択的に電力供給されるようにする。図6および図7で更に示すように、磁気軸受アクチュエータの主コイル353および副コイル355は、ジンバル・アクチュエータ334およびモータ/発電機342と同様に、互いに径方向または軸方向の何れかにずらして配することができることを理解されたい。
【0033】
低レベル・デジタル補助軸受コントローラ314は、それぞれ、磁気軸受ハードウェア350の動作を表す種々の信号、および補助軸受ハードウェア360からの種々のフィードバック信号を受け取るように構成される。これらの信号に応答して、アクティブの低レベル・デジタル補助軸受コントローラ314は、補助軸受電力命令を、アクティブの補助軸受電力制御回路324へ与える。詳細には、アクティブの低レベル・デジタル補助軸受コントローラ314は、補助軸受ハードウェア360の位置を表すフィードバック信号を受け取り、更に配電システム114のバス電圧を表す信号も受け取ることができる。これらの信号に応答して、アクティブの低レベル・デジタル補助軸受コントローラ314は、補助軸受電力命令を、アクティブの補助軸受電力制御回路324へ与える。補助軸受電力制御回路324は、それぞれ、アクティブのときに、その補助軸受電力命令に応答して補助軸受ハードウェア360の少なくとも一部に選択的に電力供給するように構成される。
【0034】
補助軸受ハードウェア360は、磁気軸受ハードウェア350が動作不能であるかまたは適切に動作できない場合に、エネルギー蓄積フライホイール・アセンブリ310を回転自在に支持するために使用される。補助軸受ハードウェア360は、アクチュエータ・アセンブリ362、1または複数の補助(または副)軸受アセンブリ364、主位置センサ367、副位置センサ366、およびブレーキ・アセンブリ368を含む。アクチュエータ・アセンブリ362は、適切に電力供給されたことに応じて、補助軸受アセンブリ364を係合(engage)位置または非係合(disengage)位置の何れかに移動させる。補助軸受アセンブリ364の通常の位置である非係合位置では、補助軸受アセンブリ364はフライホイール・アセンブリ310と係合されておらず、回転自在に支持しない。正確に言えば、フライホイール・アセンブリ310は、磁気軸受ハードウェア350によって回転自在に支持される。逆に係合位置では、補助軸受アセンブリ364はフライホイール・アセンブリ310と係合し、回転自在に支持する。
【0035】
補助軸受アクチュエータ・アセンブリ362は、ジンバル・アクチュエータ334、モータ/発電機342および磁気軸受アクチュエータ352と同様に、適切な冗長性を備えて構成される。詳細には、補助軸受アクチュエータ・アセンブリ362は、好ましくは電気機械アクチュエータとして実施され、少なくとも主駆動コイル363および副駆動コイル365を含む。主駆動コイル363および副駆動コイル365は、それぞれ、選択的に電力供給されるように結合される。駆動コイル363、365は、アクティブの低レベル・デジタル補助軸受コントローラ314およびアクティブの補助軸受電力制御回路324へ供給されるフィードバック信号に少なくとも部分的に基づいて、選択的に電力供給される。より詳細には、例えば、主駆動コイル363が通常は選択的に電力供給されるように構成される。しかし、アクティブの低レベル・デジタル補助軸受コントローラ314および/またはアクティブの補助軸受電力制御回路324が、補助軸受ハードウェア360から供給されるフィードバック信号に少なくとも部分的に基づいて、主駆動コイル363が動作不能であると判定した場合には、フライホイール・システム106は、それ自体を自動的に再コンフィギュレーションして、副駆動コイル365がアクティブの低レベル・デジタル補助軸受コントローラ314およびアクティブの補助軸受電力制御回路324よって制御され選択的に電力供給されるようにする。
【0036】
補助軸受アクチュエータ・アセンブリ362は、多数の構成のうちの任意の1つによって実施できることを理解されたい。例えば、補助軸受アクチュエータ・アセンブリ362は、ジンバル・アクチュエータ334と同様に、主駆動コイル363も副駆動コイル365も1つのロータ327と関連するように、実施することができる。更に、図6および図7に示されるように、駆動コイル363、365は、互いに径方向または軸方向の何れかにずらして配することができ、あるいは図8に示されるように、駆動コイル363、365のそれぞれは、それ自体の個別ロータ327、329と関連付けさせることもできる。
【0037】
完全を期するために、次に、図4および図5を参照されたい。これらの図は、エネルギー蓄積フライホイール・システム106の例示的な物理的実施形態を示す。これらの図に示されるように、例示的なフライホイール・システム106は、好ましくはハウジング・アセンブリ402を含み、これは、2つのジンバル軸受404(1つのみ図示)を介してジンバル・フレーム332内に回転自在に取り付けられる。1つのジンバル・アクチュエータ334がジンバル・フレーム332に取り付けられ、前述のように、ハウジング・アセンブリ402を適切な角速度に配置するように制御され選択的に電力供給され(図4および図5には示さず)、それによって姿勢制御が行われる。
【0038】
ハウジング・アセンブリ402は、中央部分406、2つの端部408および410、モータ/発電機ハウジング412、補助軸受ハウジング414、および補助モータ・ハウジング416を含む。ハウジング・アセンブリ402は、一緒に結合された多数の部分から構成されるものとして示されているが、一体化構造として形成できることも理解されたい。何にしても、モータ/発電機ハウジング412はハウジング・アセンブリの第2の端部410に結合され、補助軸受ハウジング414はハウジング・アセンブリの第1の端部408に結合され、補助モータ・ハウジング416は補助軸受ハウジング414に結合される。
【0039】
モータ/発電機342のステータは、モータ/発電機ハウジング412に取り付けられ、モータ/発電機342のロータは、フライホイール・アセンブリ310に結合される。フライホイール・アセンブリ310は、より詳細に図5に示されるように、シャフト・アセンブリ502、ハブ504、およびフライホイール・リム506を含む。シャフト・アセンブリ502は、2組の磁気軸受ハードウェア340または2つの補助軸受アセンブリ364の何れかを介して、ハウジング・アセンブリ402に回転自在に取り付けられる。ハブ504は、好ましくは高強度の合金でできており、シャフト・アセンブリ502に取り付けられる。ハブ504は、例えば、中実構造、スポーク型構造、それらの組合せなどを含む多数の構造のうちの任意の1つの形で作製されてよい。フライホイール・リム506は、ハブ504に取り付けられてハブ504を囲み、例えば、フィラメントを巻線いた炭素繊維などのような強度対密度比が高い材料でできていることが好ましい。
【0040】
以上、本発明を好ましい実施形態に関して説明してきたが、当業者には理解されるように、本発明の範囲から逸脱することなく、種々の変更を加えることができ、また本発明の要素の代わりに等価物を代用することもできる。加えて、本発明の本質的な範囲から逸脱することなく、特定の状況または材料に適合するように多くの改変を本発明の教示に対して加えることができる。従って、本発明は、本発明を実施するために企図された最良の形態として開示された特定の実施形態に限定されるものではなく、特許請求の範囲に入るすべての実施形態を含むものである。
【図面の簡単な説明】
【0041】
【図1】図1は、例示的な一体化された電力および姿勢制御システムの簡略構成図である。
【図2】図2は、図1のシステムを含むことができる宇宙機の例示的な物理的実施形態の平面図である。
【図3】図3は、図1のシステムに使用できる1つのエネルギー蓄積フライホイール・システムの例示的実施形態の機能ブロック図である。
【図4】図4は、図3のエネルギー蓄積フライホイール・システムの物理的実施形態の平面図である。
【図5】図5は、図3のエネルギー蓄積フライホイール・システムの物理的実施形態の断面図である。
【図6】図6は、図3のエネルギー蓄積フライホイール・システムにおける冗長性を実現するための構成を示す。
【図7】図7は、図3のエネルギー蓄積フライホイール・システムにおける冗長性を実現するための構成を示す。
【図8】図8は、図3のエネルギー蓄積フライホイール・システムにおける冗長性を実現するための構成を示す。
【特許請求の範囲】
【請求項1】
エネルギー蓄積フライホイール・システムであって、
シャフトと、
前記シャフトに取り付けられたフライホイール・アセンブリと、
複数の磁気軸受アセンブリであって、それぞれの磁気軸受アセンブリが主アクチュエータ・コイルおよび副アクチュエータ・コイルを含み、それぞれの前記アクチュエータ・コイルは、選択的に電力供給および電力遮断されるように適合され、電力供給されているときに、前記フライホイール・アセンブリを非接触で回転自在に取り付けるように構成された、複数の磁気軸受アセンブリと、
前記フライホイール・アセンブリに結合され、モータ・モードまたは発電機モードの何れかで動作するように構成されたモータ/発電機であって、ロータおよびステータを含み、前記ステータが主ステータ・コイルおよび副ステータ・コイルを含む、モータ/発電機と、
少なくとも前記磁気軸受アセンブリおよび前記モータ/発電機を制御するように構成されたフライホイール制御モジュールと
を備え、
前記フライホイール制御モジュールが、
少なくとも主処理チャネルおよび副処理チャネルを含む多チャネル処理モジュールであって、それぞれの前記処理チャネルが、少なくとも磁気軸受アセンブリ電力制御命令およびモータ/発電機電力制御命令を選択的に与えるように構成されている、多チャネル処理モジュールと、
前記多チャネル処理モジュールと通信するものであり、少なくとも主電力制御チャネルおよび副電力制御チャネルを含む多チャネル電力制御モジュールと
を備え、
それぞれの前記電力制御チャネルが、少なくとも前記磁気軸受電力制御命令および前記モータ/発電機電力制御命令を受け取るように結合され、該命令を受け取ると、(i)それぞれの前記磁気軸受アセンブリの前記主アクチュエータ・コイルまたは前記副アクチュエータ・コイルの何れかに選択的に磁気軸受作動電力を供給するように動作し、また、(ii)前記主ステータ・コイルの組または前記副ステータの組の何れかへ選択的に電力を供給するように、または何れかから選択的に電力を引き出すように動作する、
システム。
【請求項2】
請求項1に記載のシステムであって、
それぞれの前記処理チャネルは少なくとも、(i)前記磁気軸受電力制御命令を選択的に与えるように構成された低レベル・デジタル磁気軸受コントローラと、(ii)前記モータ/発電機電力制御命令を選択的に与えるように構成された低レベル・デジタル・モータ/発電機コントローラとを含み、
それぞれの前記電力制御チャネルは少なくとも、(i)前記磁気軸受電力制御命令に応答して、前記軸受作動電力を選択的に供給する磁気軸受電力制御回路と、(ii)前記モータ/発電機電力制御命令に応答して、前記主ステータ・コイルまたは前記副ステータ・コイルの何れかへ選択的に電力を供給する、または何れかから選択的に電力を引き出すモータ/発電機電力制御回路とを含み、
前記多チャネル処理モジュールは、それぞれの前記処理チャネルが少なくとも部分的にアクティブ・モードまたはスタンバイ・モードの何れかであるように、構成され、
前記多チャネル電力制御モジュールは、それぞれの前記電力制御チャネルが少なくとも部分的にアクティブ・モードまたはスタンバイ・モードの何れかであるように、構成され、
それぞれの前記処理チャネルの、前記低レベル・デジタル磁気軸受コントローラの1つと前記低レベル・デジタル・モータ/発電機コントローラの1つとが、アクティブ・モードであり、
それぞれの前記電力制御チャネルの、前記磁気軸受電力制御回路の1つと前記モータ/発電機電力制御回路の1つとが、アクティブ・モードである、
システム。
【請求項3】
請求項1に記載のシステムであって、
前記シャフトを選択的に回転自在に支持するようにそれぞれが構成された複数の副軸受アセンブリと、
1または複数の前記副軸受アセンブリと結合される副軸受アクチュエータ・アセンブリと
を更に備え、
前記副軸受アクチュエータ・アセンブリは、主駆動コイルおよび副駆動コイルを含み、前記副軸受アクチュエータ・アセンブリのそれぞれの前記駆動コイルは、選択的に電力供給および電力遮断されるように適合され、また、電力供給されているときに、前記副軸受アクチュエータ・アセンブリが1または複数の前記副軸受アセンブリを(i)係合位置と(ii)非係合位置とのうちの何れかへ移動させるように構成され、前記係合位置は、それぞれの前記副軸受アセンブリが前記シャフトを回転自在に支持する位置であり、前記非係合位置は、それぞれの前記副軸受アセンブリが前記シャフトを回転自在に支持しない位置であり、
それぞれの前記処理チャネルは更に、少なくとも副軸受アセンブリ電力制御命令を選択的に与えるように構成され、
それぞれの前記電力制御チャネルは更に、前記副軸受電力制御命令を受け取るように結合され、該命令を受け取ると、前記副軸受アクチュエータの前記主駆動コイルまたは前記副駆動コイルの何れかに選択的に電力供給するように更に動作する、
システム。
【請求項1】
エネルギー蓄積フライホイール・システムであって、
シャフトと、
前記シャフトに取り付けられたフライホイール・アセンブリと、
複数の磁気軸受アセンブリであって、それぞれの磁気軸受アセンブリが主アクチュエータ・コイルおよび副アクチュエータ・コイルを含み、それぞれの前記アクチュエータ・コイルは、選択的に電力供給および電力遮断されるように適合され、電力供給されているときに、前記フライホイール・アセンブリを非接触で回転自在に取り付けるように構成された、複数の磁気軸受アセンブリと、
前記フライホイール・アセンブリに結合され、モータ・モードまたは発電機モードの何れかで動作するように構成されたモータ/発電機であって、ロータおよびステータを含み、前記ステータが主ステータ・コイルおよび副ステータ・コイルを含む、モータ/発電機と、
少なくとも前記磁気軸受アセンブリおよび前記モータ/発電機を制御するように構成されたフライホイール制御モジュールと
を備え、
前記フライホイール制御モジュールが、
少なくとも主処理チャネルおよび副処理チャネルを含む多チャネル処理モジュールであって、それぞれの前記処理チャネルが、少なくとも磁気軸受アセンブリ電力制御命令およびモータ/発電機電力制御命令を選択的に与えるように構成されている、多チャネル処理モジュールと、
前記多チャネル処理モジュールと通信するものであり、少なくとも主電力制御チャネルおよび副電力制御チャネルを含む多チャネル電力制御モジュールと
を備え、
それぞれの前記電力制御チャネルが、少なくとも前記磁気軸受電力制御命令および前記モータ/発電機電力制御命令を受け取るように結合され、該命令を受け取ると、(i)それぞれの前記磁気軸受アセンブリの前記主アクチュエータ・コイルまたは前記副アクチュエータ・コイルの何れかに選択的に磁気軸受作動電力を供給するように動作し、また、(ii)前記主ステータ・コイルの組または前記副ステータの組の何れかへ選択的に電力を供給するように、または何れかから選択的に電力を引き出すように動作する、
システム。
【請求項2】
請求項1に記載のシステムであって、
それぞれの前記処理チャネルは少なくとも、(i)前記磁気軸受電力制御命令を選択的に与えるように構成された低レベル・デジタル磁気軸受コントローラと、(ii)前記モータ/発電機電力制御命令を選択的に与えるように構成された低レベル・デジタル・モータ/発電機コントローラとを含み、
それぞれの前記電力制御チャネルは少なくとも、(i)前記磁気軸受電力制御命令に応答して、前記軸受作動電力を選択的に供給する磁気軸受電力制御回路と、(ii)前記モータ/発電機電力制御命令に応答して、前記主ステータ・コイルまたは前記副ステータ・コイルの何れかへ選択的に電力を供給する、または何れかから選択的に電力を引き出すモータ/発電機電力制御回路とを含み、
前記多チャネル処理モジュールは、それぞれの前記処理チャネルが少なくとも部分的にアクティブ・モードまたはスタンバイ・モードの何れかであるように、構成され、
前記多チャネル電力制御モジュールは、それぞれの前記電力制御チャネルが少なくとも部分的にアクティブ・モードまたはスタンバイ・モードの何れかであるように、構成され、
それぞれの前記処理チャネルの、前記低レベル・デジタル磁気軸受コントローラの1つと前記低レベル・デジタル・モータ/発電機コントローラの1つとが、アクティブ・モードであり、
それぞれの前記電力制御チャネルの、前記磁気軸受電力制御回路の1つと前記モータ/発電機電力制御回路の1つとが、アクティブ・モードである、
システム。
【請求項3】
請求項1に記載のシステムであって、
前記シャフトを選択的に回転自在に支持するようにそれぞれが構成された複数の副軸受アセンブリと、
1または複数の前記副軸受アセンブリと結合される副軸受アクチュエータ・アセンブリと
を更に備え、
前記副軸受アクチュエータ・アセンブリは、主駆動コイルおよび副駆動コイルを含み、前記副軸受アクチュエータ・アセンブリのそれぞれの前記駆動コイルは、選択的に電力供給および電力遮断されるように適合され、また、電力供給されているときに、前記副軸受アクチュエータ・アセンブリが1または複数の前記副軸受アセンブリを(i)係合位置と(ii)非係合位置とのうちの何れかへ移動させるように構成され、前記係合位置は、それぞれの前記副軸受アセンブリが前記シャフトを回転自在に支持する位置であり、前記非係合位置は、それぞれの前記副軸受アセンブリが前記シャフトを回転自在に支持しない位置であり、
それぞれの前記処理チャネルは更に、少なくとも副軸受アセンブリ電力制御命令を選択的に与えるように構成され、
それぞれの前記電力制御チャネルは更に、前記副軸受電力制御命令を受け取るように結合され、該命令を受け取ると、前記副軸受アクチュエータの前記主駆動コイルまたは前記副駆動コイルの何れかに選択的に電力供給するように更に動作する、
システム。
【図1】



【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2008−182877(P2008−182877A)
【公開日】平成20年8月7日(2008.8.7)
【国際特許分類】
【外国語出願】
【出願番号】特願2007−319603(P2007−319603)
【出願日】平成19年12月11日(2007.12.11)
【出願人】(500575824)ハネウェル・インターナショナル・インコーポレーテッド (1,504)
【Fターム(参考)】
【公開日】平成20年8月7日(2008.8.7)
【国際特許分類】
【出願番号】特願2007−319603(P2007−319603)
【出願日】平成19年12月11日(2007.12.11)
【出願人】(500575824)ハネウェル・インターナショナル・インコーポレーテッド (1,504)
【Fターム(参考)】
[ Back to top ]