
電子線殺菌システム
【課題】対象物に照射される電子線の照射量を適切な範囲内に制御する電子線殺菌システ
ムを提供する。
【解決手段】電子線殺菌装置は、搬送装置によって搬送される食品容器に電子線を照射する電子線照射装置と、電子線照射装置のビーム電流、加速電圧、スキャン周波数及びスキャン幅、搬送装置の搬送速度等の制御値が適正であるための条件を記憶する記憶部と、実際の制御値がその条件を満たしているか否かを判断する判断部と、条件が満たされていないとき、食品容器に適切な照射量の電子線が照射されていないと判定してその食品容器を搬送ラインから除去する除去装置とを備える。
ムを提供する。
【解決手段】電子線殺菌装置は、搬送装置によって搬送される食品容器に電子線を照射する電子線照射装置と、電子線照射装置のビーム電流、加速電圧、スキャン周波数及びスキャン幅、搬送装置の搬送速度等の制御値が適正であるための条件を記憶する記憶部と、実際の制御値がその条件を満たしているか否かを判断する判断部と、条件が満たされていないとき、食品容器に適切な照射量の電子線が照射されていないと判定してその食品容器を搬送ラインから除去する除去装置とを備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、電子線を用いて殺菌を行うシステムに関する。
【背景技術】
【0002】
食品容器、医療機器等、衛生が重視される製品は、製造過程において殺菌される。通常、過酸化水素に例示される薬剤を用いて殺菌(ウェット殺菌と呼ばれる)が行われる。望まれる程度で殺菌が行われていることの確認は、例えば、殺菌された製品をサンプルとして培養を行い、微生物の繁殖を測定することによって行われる。
【0003】
薬剤の使用に代えて電子線を用いて殺菌する技術が検討されている。電子線を用いた殺菌(ドライ殺菌と呼ばれる)は、薬剤を使用しないことから、薬剤のコストが不要となること、薬剤をすすぐ工程が不要となること等の点で優れている。
【0004】
特許文献1には、電子線/X線照射システムが記載されている。その電子線/X線照射システムは、X線照射装置と、被照射体を透過したX線を測定するX線測定装置と、X線の測定値から被照射体の密度分布を求める計算手段と、その密度分布を用いて被照射体に照射する電子線/X線を制御する制御手段とを含む。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2002‐221599号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
電子線を用いて食品容器の殺菌が行われる場合、電子線の照射量が不足すると食品容器は十分に殺菌されない。電子線の照射量が過剰であると、食品容器の変色等の望まれない変化が起こる。適正な照射量の電子線を供給する技術が望まれる。
【0007】
本発明の目的は、対象物に照射される電子線の照射量を適切な範囲内に制御する電子線殺菌システムを提供することである。
【課題を解決するための手段】
【0008】
以下に、[発明を実施するための形態]で使用される番号を括弧付きで用いて、課題を解決するための手段を説明する。これらの番号は、[特許請求の範囲]の記載と[発明を実施するための形態]との対応関係を明らかにするために付加されたものである。ただし、それらの番号を、[特許請求の範囲]に記載されている発明の技術的範囲の解釈に用いてはならない。
【0009】
本発明による電子線殺菌システムは、搬送装置(20)と、搬送装置(20)によって搬送される食品容器(10)に電子線を照射する電子線照射装置(30)と、電子線照射装置(30)の制御値が適正であるための条件を記憶する格納部(59)と、制御値が条件を満たしているか否かを判断する判断部(50)とを備える。
【0010】
本発明による電子線殺菌システムは、電子線照射装置(30)が発生する電子線のビーム電流の電流値を測定する電流検出器を備える。条件は、電流値の許容範囲を含む。
【0011】
本発明による電子線殺菌システムは、判断部(50)により制御値が条件を満たしていないと判断された食品容器(10)を除去する不良品除去装置(60)を備える。
【0012】
本発明による電子線殺菌システムは、不良品除去装置(60)の上流側に設けられ、判断部(50)により制御値が条件を満たしていると判断された食品容器(10)に内容物を充填し、前記条件を満たしていないと判断された場合に前記食品容器に内容物を充填しない充填装置(9)を備える。
【0013】
本発明による電子線殺菌システムにおいて、条件は、電子線照射装置(30)の加速電圧の許容範囲を含む。
【0014】
本発明による電子線殺菌システムにおいて、電子線照射装置(30)は電子線を走査する電子線走査部(42)を備える。条件は、電子線走査部(42)を制御するために用いられる走査制御値の条件を含む。
【0015】
本発明による電子線殺菌システムにおいて、走査制御値はスキャン周波数である。
【0016】
本発明による電子線殺菌システムにおいて、走査制御値はスキャン幅である。
【0017】
本発明による電子線殺菌システムは、電子線照射装置(30)による電子線の照射範囲内に設けられ、電子線が照射されているか否かを示す検出信号を出力するビームセンサ(44)と、走査制御値に示されるスキャン幅と検出信号とを照合して整合性を判定するスキャン幅判定部(54)とを備える。
【0018】
本発明による電子線殺菌システムは、搬送装置(20)によって搬送される食品容器(10)の搬送速度を検知する搬送速度検知部(55)と、搬送速度が所定の速度条件を満たしているか否かを判定する搬送速度条件判定部(61)とを備える。
【0019】
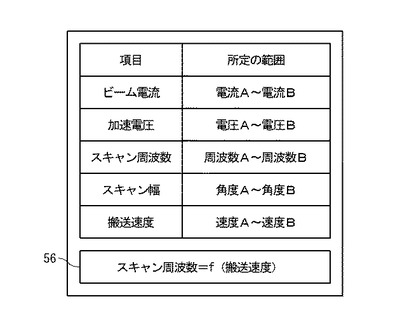
本発明による電子線殺菌システムにおいて、格納部(59)は、搬送速度と走査制御値との関係を指定するスキャン周波数‐搬送速度関係データ(56)を記憶する。電子線殺菌装置は、スキャン周波数‐搬送速度関係データ(56)に基づいて搬送速度検知部(55)が検知した搬送速度から得られる走査制御値を用いて電子線走査部(42)を制御する走査制御値調節部(57)を備える。
【発明の効果】
【0020】
本発明によれば、対象物に照射される電子線の照射量を適切な範囲内に制御する電子線殺菌システムが提供される。
【図面の簡単な説明】
【0021】
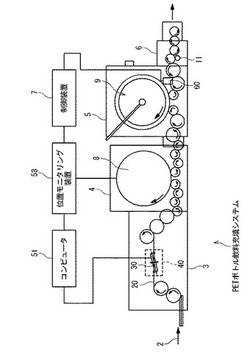
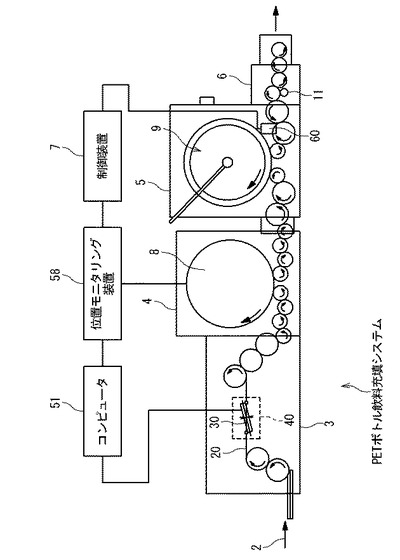
【図1】図1は、食品容器飲料充填システムの構成を示す。
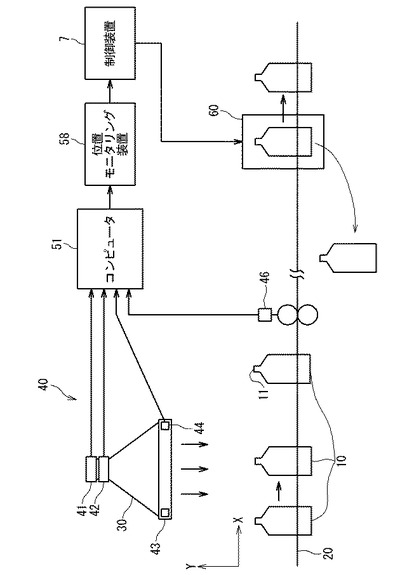
【図2】図2は、殺菌部の付近の構成を説明するための図である。
【図3】図3は、コンピュータの構成を示す。
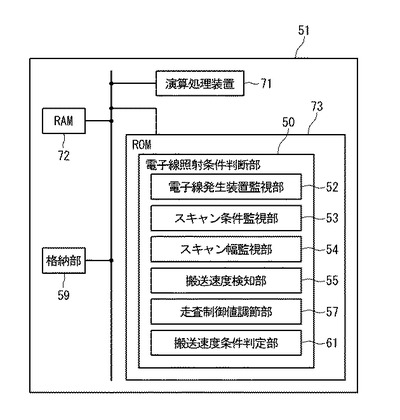
【図4】図4は、格納部に格納された情報を示す。
【図5】図5は、電子線殺菌システムの動作を示すフローチャートである。
【図6】図6は、照射条件取得ステップの動作を示すフローチャートである。
【図7】図7は、照射条件判断ステップの動作を示すフローチャートである。
【発明を実施するための形態】
【0022】
以下、図面を参照しながら本発明による電子線殺菌システムを実施するための形態について説明する。本実施の形態における電子線殺菌システムは、PETボトルに例示される食品容器を殺菌するために使用される。
【0023】
図1は、食品容器を電子線によって殺菌し、内容物を充填してキャップする食品容器飲料充填システムの構成を概略的に示す図である。食品容器飲料充填システムは、殺菌室3、すすぎリンサ室4、充填室5及びキャッパ室6を備える。これらはすべてクリーンルームである。
【0024】
食品容器は、入口2から殺菌室3に搬入される。搬入された食品容器は、搬送装置20によって殺菌部40へ搬送され、電子線照射装置30により殺菌される。殺菌された食品容器は搬送装置によってすすぎリンサ室4へ搬送される。食品容器は、すすぎリンサ室4に設置されるすすぎリンサ8によって水又は空気を用いてすすがれる。電子線殺菌を行う本発明においては、すすぎリンサ4は不要な場合がある。すすがれた食品容器は、搬送装置によって充填室5に搬送される。充填室5に設置される充填装置9は、食品容器の内部に飲料を充填する。飲料を充填された食品容器は搬送装置によってキャッパ室6に搬送される。キャッパ室6に設置されるキャッパ装置11は、食品容器にキャップを装着する。キャップを装着された食品容器は、出口から搬出される。
【0025】
図2は、殺菌部40の付近の構成を説明するための図である。殺菌部40には、電子線照射装置30が設置される。電子線照射装置30は、電子線を生成する電子線供給部41、生成された電子線を走査する電子線走査部42及び電子線のスキャンホーンの先端(被照射対象である食品容器に近い側の開口端)に設置される電子線照射口43を備える。電子線照射装置30は更に、電子線の出力回路の電流値であるビーム電流を検出する電流検出器を備える。電流検出器は例えばCT(Current Transformer)、シャント抵抗器である。
【0026】
電子線照射装置30は更に、電子線の有無を検出し、その結果を示す電子線検出信号を生成するビームセンサ44を備える。ビームセンサ44は、走査方向に沿って複数設置されることが好ましい。例えば、電子線照射口43において第1点(走査開始位置)から第2点(走査終了位置)まで電子線が走査されるとすると、ビームセンサ44は第1点またはそれよりやや第2点に寄った側、及び第2点またはそれよりやや第1点に寄った側に設置される。
【0027】
殺菌部40には、制御部46が設けられる。制御部46は、搬送装置20の搬送速度を制御する。電子線供給部41、電子線走査部42、ビームセンサ44及び制御部46はコンピュータ51に通信可能に接続され、コンピュータ51によって搬送速度及び電子線照射方法が制御される。
【0028】
位置モニタリング装置58は、搬送装置20が搬送している複数の食品容器10の各々の位置を監視している。位置モニタリング装置58は、殺菌部40においてある食品容器に対して適正に電子線が照射されていないことを示す除去信号をコンピュータ51から受信すると、その食品容器に対して次の処理を行う。位置モニタリング装置58は、食品容器10が充填装置9によって内容物を充填される位置まで搬送されると、制御装置7に対して飲料充填が不要である旨を示す飲料充填不用信号を通知する。食品容器10が不良品除去装置60が動作する位置まで搬送されると、制御装置7に対して、食品容器10を搬送ラインから除去すべき旨を示す除去信号を発信する。
【0029】
制御装置7は、位置モニタリング装置58から充填不要信号を取得すると、充填装置9が食品容器10に内容物を充填しないように、充填装置9の動作を制御する。このように内容物を充填しないことで、内容物の材料コストを低減できる。更に、制御装置7は、位置モニタリング装置58から除去信号を取得すると、不良品除去装置60が食品容器10を製造ラインから除去するように、不良品除去装置60の動作を制御する。
【0030】
不良品除去装置60は、充填装置9とキャッパ装置11の間に設けられている。不良品除去装置60は、制御装置7からの指示に従って動作し、不良品と判断された食品容器10を製造経路から除去する。不良品除去装置60は、殺菌部40の後工程であれば、他の位置に設けられていてもよい。不良品除去装置60が、殺菌部40と充填装置9との間に設けられている場合には、既述の、食品容器10に内容物が充填されないように制御装置7が充填装置9を制御する、という動作が省略される。
【0031】
図3はコンピュータ51の構成を概略的に示す図である。コンピュータ51は、演算処理装置71、ROM73、RAM72、及び格納部59を備えており、これらは互いにバスを介して接続されている。ROM73には、演算処理装置71により読み取られ実行されるコンピュータプログラムである電子線照射条件判断部50が格納されている。
【0032】
図4は、格納部59に格納された情報を概念的に示す図である。格納部59には、ビーム電流、加速電圧、スキャン周波数、スキャン幅及び搬送速度について所定の範囲が予め格納されている。格納部59には更に、スキャン周波数‐搬送速度関係データ56が格納されている。スキャン周波数‐搬送速度関係データ56は、スキャン周波数と搬送速度との関係をテーブル又は関数形で示す。
【0033】
図3に戻り、電子線照射条件判断部50は、電子線発生装置監視部52、スキャン条件監視部53、スキャン幅判定部54、搬送速度検知部55、走査制御値調節部57及び搬送速度条件判定部61を備えている。
【0034】
電子線発生装置監視部52は、格納部59の記録数値と検出数値を比較し良否を判断し、また電流検出器によって検出されるビーム電流が所定の範囲内に収まっているか否かにより良否を判断する。
【0035】
スキャン条件判定部53は、格納部59を参照して、電子線走査部42が電子線を走査するために用いる制御値であるスキャン周波数が所定の範囲に収まっているか否かを判断する。
【0036】
スキャン幅判定部54は、格納部59を参照して、電子線走査部42が電子線を走査するために用いる制御値であるスキャン幅(電子線照射口43において電子線が走査される範囲、又は固定された電子線供給部から供給される電子線を磁界により屈折させて偏向する角度の範囲)が所定の範囲に収まっているか否かを判断する。スキャン幅判定部54は更に、ビームセンサ44から電子線検出信号を受信する。
【0037】
搬送速度検知部55は、格納部59を参照して、制御部46が搬送装置20を駆動するために用いる速度の制御値である搬送速度が所定の範囲に収まっているか否かを判断する。
【0038】
図5は本実施の形態における電子線殺菌システムの動作を示すフローチャートである。以下の説明において、コンピュータ51が備える演算処理装置71が電子線照射条件判断部50に格納されているプログラムを読み出し、そのプログラムに記述された手順に従って実行する動作は、プログラム自身が行う動作として記述される。
【0039】
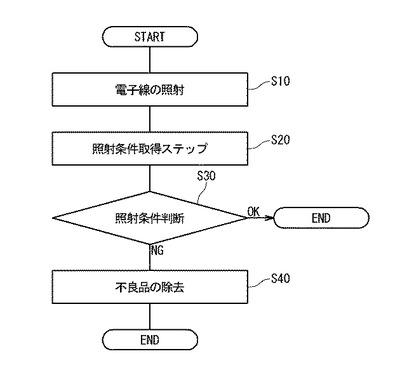
本実施の形態に係る電子線殺菌検査システムの動作は、電子線を照射するステップ(ステップS10)、電子線の照射条件を取得する照射条件取得ステップ(ステップS20)、取得された照射条件の適正性を判断する判断ステップ(ステップS30)、及び不良品を除去するステップ(ステップS40)を備えている。
【0040】
(ステップS10)
電子線供給部41は電子線を生成する。電子線走査部42は生成された電子線を周期的に偏向して走査する。電子線照射口43から搬送装置20上の食品容器に向けて電子線が照射される。搬送装置20が駆動される。食品容器10が入口2から搬入される。食品容器10は搬送装置20によって殺菌部40に搬送されて電子線照射装置30により電子線を照射される。
【0041】
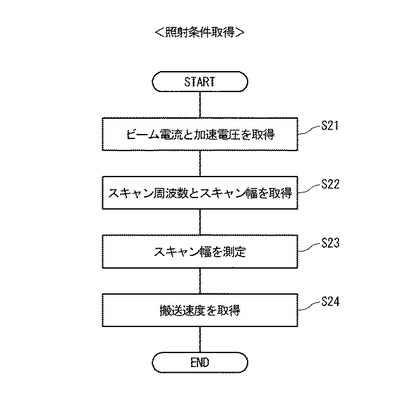
図6は照射条件取得ステップ(ステップS20)の動作を示すフローチャートである。(ステップS21)
電子線発生装置監視部52は、電流検知器、例えばCTによって検出されるビーム電流の電流値を検知してRAM72に保存する。電子線発生装置監視部52は更に、加速電圧を制御するために用いられる加速電圧制御値を取得してRAM72に保存する。
【0042】
(ステップS22)
スキャン条件監視部53は、電子線走査部42のスキャン周波数を制御するために用いられるスキャン周波数制御値を取得してRAM72に保存する。スキャン情報監視部53は更に、スキャン幅を制御するために用いられるスキャン幅制御値を取得してRAM72に保存する。
【0043】
(ステップS23)
スキャン幅判定部54は、ビームセンサ44から電子線検出信号を受信し、所期のスキャン幅にビームが走査されたか否かを示す判断情報をRAM72に保存する。
【0044】
(ステップS24)
搬送速度検知部55は、搬送装置20を駆動するために用いられる搬送速度制御値を制御部46から取得してRAM72に保存する。
【0045】
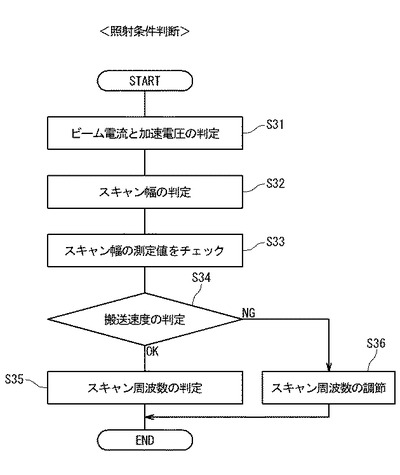
図7は、照射条件判断ステップ(S30)の動作を示すフローチャートである。
(ステップS31)
電子線発生装置監視部52は、格納部59を参照して、ステップS21において保存されたビーム電流の電流値が所定の範囲に収まっていない場合、位置モニタリング装置58に除去信号を発信する。電子線発生装置監視部52は更に、格納部59を参照して、ステップS21において取得された加速電圧制御値が所定の範囲に収まっていない場合、位置モニタリング装置58に除去信号を発信する。
【0046】
(ステップS32)
スキャン条件監視部53は、格納部59を参照して、ステップS22において保存されたスキャン周波数制御値が所定の範囲に収まっていない場合、位置モニタリング装置58に除去信号を発信する。スキャン条件監視部53は更に、格納部59を参照して、ステップS22において保存されたスキャン幅制御値が所定の範囲に収まっていない場合、位置モニタリング装置58に除去信号を発信する。
【0047】
(ステップS33)
スキャン幅判定部54は、格納部59を参照して、ステップS23において保存されたスキャン幅が所定の範囲に収まっていない場合、位置モニタリング装置58に除去信号を発信する。スキャン幅判定部54は更に、ステップS22において保存されたスキャン幅制御値とステップS23において保存されたスキャン幅との整合性を判定し、整合しない場合は位置モニタリング装置58に除去信号を発信する。
【0048】
(ステップS34)
搬送速度条件判定部61は、格納部59を参照して、ステップS24において保存された搬送速度制御値が所定の範囲に収まっているか否かを判定する。所定の範囲におさまっている場合、処理はステップS35に移行する。所定の範囲に収まっていない場合、処理はステップS36に移行する。
【0049】
(ステップS35)
スキャン条件監視部53は、格納部59を参照して、ステップS22において保存されたスキャン周波数制御値が所定の範囲に収まっていない場合、位置モニタリング装置58に除去信号を発信する。
【0050】
(ステップS36)
走査制御値調節部57は、格納部59のスキャン周波数‐搬送速度関係データ56を参照し、ステップS24において保存された搬送速度制御値に対応するスキャン周波数制御値を算出する。走査制御値調節部57は、算出されたスキャン周波数制御値を電子線走査部42に発信する。電子線走査部42は、受信したスキャン周波数制御値を用いて電子線のスキャン周波数を調節する。
【0051】
ステップS36の処理によって、例えば搬送装置20の起動時や緊急的に搬送速度が変更される場合、その搬送速度の変化に応答してスキャン周波数が変更されることにより、食品容器10に照射される電子線の照射量が適正な範囲内に収まる。
【0052】
搬送速度20が所定範囲に入る場合にビーム電流又は加速電圧を変更することも可能だが、照射量を望む範囲に制御するためにはスキャン周波数を変更することが容易であり望ましい。
【0053】
本実施の形態における電子線殺菌システムは、電子線の照射量が適切に制御されることにより、次のように格別の効果を奏する。すなわち、電子線殺菌においては、対象物に電子線が照射されたとき、電子線の照射量と対象物に微生物が残存する割合との間には、一定の関係がある。そのため、電子線の照射量を適正な範囲に制御することにより、所望の程度まで殺菌が達成されたことが期待できる。
【0054】
こうした特性は、薬剤を用いた殺菌システムの場合と異なる。薬剤を用いた殺菌システムでは通常、望まれる程度で殺菌が行われていることを確認するために、対象物をサンプルとして微生物を培養し、繁殖の程度を観察する。本実施の形態における電子線殺菌では、確実に適正範囲の電子線を対象物に照射することにより、望まれる程度での殺菌を実行できる。また、適正でない食品容器に対して充填不要として判断し、充填せずに除去が可能となる。これにより、電子線殺菌の特性を活かして、定量的な信頼性のある殺菌が実現される。
【符号の説明】
【0055】
2…入口
3…殺菌室
4…すすぎリンサ室
5…充填室
6…キャッパ室
7…制御装置
8…すすぎリンサ
9…充填装置
10…食品容器
11…キャッパ装置
20…搬送装置
30…電子線照射装置
40…殺菌部
41…電子線供給部
42…電子線走査部
43…電子線照射口
44…ビームセンサ
46…制御部
50…電子線照射条件判断部
51…コンピュータ
52…電子線発生装置監視部
53…スキャン条件監視部
54…スキャン幅判定部
55…搬送速度検知部56…スキャン周波数‐搬送速度関係データ
57…走査制御値調節部
58…位置モニタリング装置
59…格納部
60…不良品除去装置
61…搬送速度条件判定部
71…演算処理装置
72…RAM
73…ROM
【技術分野】
【0001】
本発明は、電子線を用いて殺菌を行うシステムに関する。
【背景技術】
【0002】
食品容器、医療機器等、衛生が重視される製品は、製造過程において殺菌される。通常、過酸化水素に例示される薬剤を用いて殺菌(ウェット殺菌と呼ばれる)が行われる。望まれる程度で殺菌が行われていることの確認は、例えば、殺菌された製品をサンプルとして培養を行い、微生物の繁殖を測定することによって行われる。
【0003】
薬剤の使用に代えて電子線を用いて殺菌する技術が検討されている。電子線を用いた殺菌(ドライ殺菌と呼ばれる)は、薬剤を使用しないことから、薬剤のコストが不要となること、薬剤をすすぐ工程が不要となること等の点で優れている。
【0004】
特許文献1には、電子線/X線照射システムが記載されている。その電子線/X線照射システムは、X線照射装置と、被照射体を透過したX線を測定するX線測定装置と、X線の測定値から被照射体の密度分布を求める計算手段と、その密度分布を用いて被照射体に照射する電子線/X線を制御する制御手段とを含む。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2002‐221599号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
電子線を用いて食品容器の殺菌が行われる場合、電子線の照射量が不足すると食品容器は十分に殺菌されない。電子線の照射量が過剰であると、食品容器の変色等の望まれない変化が起こる。適正な照射量の電子線を供給する技術が望まれる。
【0007】
本発明の目的は、対象物に照射される電子線の照射量を適切な範囲内に制御する電子線殺菌システムを提供することである。
【課題を解決するための手段】
【0008】
以下に、[発明を実施するための形態]で使用される番号を括弧付きで用いて、課題を解決するための手段を説明する。これらの番号は、[特許請求の範囲]の記載と[発明を実施するための形態]との対応関係を明らかにするために付加されたものである。ただし、それらの番号を、[特許請求の範囲]に記載されている発明の技術的範囲の解釈に用いてはならない。
【0009】
本発明による電子線殺菌システムは、搬送装置(20)と、搬送装置(20)によって搬送される食品容器(10)に電子線を照射する電子線照射装置(30)と、電子線照射装置(30)の制御値が適正であるための条件を記憶する格納部(59)と、制御値が条件を満たしているか否かを判断する判断部(50)とを備える。
【0010】
本発明による電子線殺菌システムは、電子線照射装置(30)が発生する電子線のビーム電流の電流値を測定する電流検出器を備える。条件は、電流値の許容範囲を含む。
【0011】
本発明による電子線殺菌システムは、判断部(50)により制御値が条件を満たしていないと判断された食品容器(10)を除去する不良品除去装置(60)を備える。
【0012】
本発明による電子線殺菌システムは、不良品除去装置(60)の上流側に設けられ、判断部(50)により制御値が条件を満たしていると判断された食品容器(10)に内容物を充填し、前記条件を満たしていないと判断された場合に前記食品容器に内容物を充填しない充填装置(9)を備える。
【0013】
本発明による電子線殺菌システムにおいて、条件は、電子線照射装置(30)の加速電圧の許容範囲を含む。
【0014】
本発明による電子線殺菌システムにおいて、電子線照射装置(30)は電子線を走査する電子線走査部(42)を備える。条件は、電子線走査部(42)を制御するために用いられる走査制御値の条件を含む。
【0015】
本発明による電子線殺菌システムにおいて、走査制御値はスキャン周波数である。
【0016】
本発明による電子線殺菌システムにおいて、走査制御値はスキャン幅である。
【0017】
本発明による電子線殺菌システムは、電子線照射装置(30)による電子線の照射範囲内に設けられ、電子線が照射されているか否かを示す検出信号を出力するビームセンサ(44)と、走査制御値に示されるスキャン幅と検出信号とを照合して整合性を判定するスキャン幅判定部(54)とを備える。
【0018】
本発明による電子線殺菌システムは、搬送装置(20)によって搬送される食品容器(10)の搬送速度を検知する搬送速度検知部(55)と、搬送速度が所定の速度条件を満たしているか否かを判定する搬送速度条件判定部(61)とを備える。
【0019】
本発明による電子線殺菌システムにおいて、格納部(59)は、搬送速度と走査制御値との関係を指定するスキャン周波数‐搬送速度関係データ(56)を記憶する。電子線殺菌装置は、スキャン周波数‐搬送速度関係データ(56)に基づいて搬送速度検知部(55)が検知した搬送速度から得られる走査制御値を用いて電子線走査部(42)を制御する走査制御値調節部(57)を備える。
【発明の効果】
【0020】
本発明によれば、対象物に照射される電子線の照射量を適切な範囲内に制御する電子線殺菌システムが提供される。
【図面の簡単な説明】
【0021】
【図1】図1は、食品容器飲料充填システムの構成を示す。
【図2】図2は、殺菌部の付近の構成を説明するための図である。
【図3】図3は、コンピュータの構成を示す。
【図4】図4は、格納部に格納された情報を示す。
【図5】図5は、電子線殺菌システムの動作を示すフローチャートである。
【図6】図6は、照射条件取得ステップの動作を示すフローチャートである。
【図7】図7は、照射条件判断ステップの動作を示すフローチャートである。
【発明を実施するための形態】
【0022】
以下、図面を参照しながら本発明による電子線殺菌システムを実施するための形態について説明する。本実施の形態における電子線殺菌システムは、PETボトルに例示される食品容器を殺菌するために使用される。
【0023】
図1は、食品容器を電子線によって殺菌し、内容物を充填してキャップする食品容器飲料充填システムの構成を概略的に示す図である。食品容器飲料充填システムは、殺菌室3、すすぎリンサ室4、充填室5及びキャッパ室6を備える。これらはすべてクリーンルームである。
【0024】
食品容器は、入口2から殺菌室3に搬入される。搬入された食品容器は、搬送装置20によって殺菌部40へ搬送され、電子線照射装置30により殺菌される。殺菌された食品容器は搬送装置によってすすぎリンサ室4へ搬送される。食品容器は、すすぎリンサ室4に設置されるすすぎリンサ8によって水又は空気を用いてすすがれる。電子線殺菌を行う本発明においては、すすぎリンサ4は不要な場合がある。すすがれた食品容器は、搬送装置によって充填室5に搬送される。充填室5に設置される充填装置9は、食品容器の内部に飲料を充填する。飲料を充填された食品容器は搬送装置によってキャッパ室6に搬送される。キャッパ室6に設置されるキャッパ装置11は、食品容器にキャップを装着する。キャップを装着された食品容器は、出口から搬出される。
【0025】
図2は、殺菌部40の付近の構成を説明するための図である。殺菌部40には、電子線照射装置30が設置される。電子線照射装置30は、電子線を生成する電子線供給部41、生成された電子線を走査する電子線走査部42及び電子線のスキャンホーンの先端(被照射対象である食品容器に近い側の開口端)に設置される電子線照射口43を備える。電子線照射装置30は更に、電子線の出力回路の電流値であるビーム電流を検出する電流検出器を備える。電流検出器は例えばCT(Current Transformer)、シャント抵抗器である。
【0026】
電子線照射装置30は更に、電子線の有無を検出し、その結果を示す電子線検出信号を生成するビームセンサ44を備える。ビームセンサ44は、走査方向に沿って複数設置されることが好ましい。例えば、電子線照射口43において第1点(走査開始位置)から第2点(走査終了位置)まで電子線が走査されるとすると、ビームセンサ44は第1点またはそれよりやや第2点に寄った側、及び第2点またはそれよりやや第1点に寄った側に設置される。
【0027】
殺菌部40には、制御部46が設けられる。制御部46は、搬送装置20の搬送速度を制御する。電子線供給部41、電子線走査部42、ビームセンサ44及び制御部46はコンピュータ51に通信可能に接続され、コンピュータ51によって搬送速度及び電子線照射方法が制御される。
【0028】
位置モニタリング装置58は、搬送装置20が搬送している複数の食品容器10の各々の位置を監視している。位置モニタリング装置58は、殺菌部40においてある食品容器に対して適正に電子線が照射されていないことを示す除去信号をコンピュータ51から受信すると、その食品容器に対して次の処理を行う。位置モニタリング装置58は、食品容器10が充填装置9によって内容物を充填される位置まで搬送されると、制御装置7に対して飲料充填が不要である旨を示す飲料充填不用信号を通知する。食品容器10が不良品除去装置60が動作する位置まで搬送されると、制御装置7に対して、食品容器10を搬送ラインから除去すべき旨を示す除去信号を発信する。
【0029】
制御装置7は、位置モニタリング装置58から充填不要信号を取得すると、充填装置9が食品容器10に内容物を充填しないように、充填装置9の動作を制御する。このように内容物を充填しないことで、内容物の材料コストを低減できる。更に、制御装置7は、位置モニタリング装置58から除去信号を取得すると、不良品除去装置60が食品容器10を製造ラインから除去するように、不良品除去装置60の動作を制御する。
【0030】
不良品除去装置60は、充填装置9とキャッパ装置11の間に設けられている。不良品除去装置60は、制御装置7からの指示に従って動作し、不良品と判断された食品容器10を製造経路から除去する。不良品除去装置60は、殺菌部40の後工程であれば、他の位置に設けられていてもよい。不良品除去装置60が、殺菌部40と充填装置9との間に設けられている場合には、既述の、食品容器10に内容物が充填されないように制御装置7が充填装置9を制御する、という動作が省略される。
【0031】
図3はコンピュータ51の構成を概略的に示す図である。コンピュータ51は、演算処理装置71、ROM73、RAM72、及び格納部59を備えており、これらは互いにバスを介して接続されている。ROM73には、演算処理装置71により読み取られ実行されるコンピュータプログラムである電子線照射条件判断部50が格納されている。
【0032】
図4は、格納部59に格納された情報を概念的に示す図である。格納部59には、ビーム電流、加速電圧、スキャン周波数、スキャン幅及び搬送速度について所定の範囲が予め格納されている。格納部59には更に、スキャン周波数‐搬送速度関係データ56が格納されている。スキャン周波数‐搬送速度関係データ56は、スキャン周波数と搬送速度との関係をテーブル又は関数形で示す。
【0033】
図3に戻り、電子線照射条件判断部50は、電子線発生装置監視部52、スキャン条件監視部53、スキャン幅判定部54、搬送速度検知部55、走査制御値調節部57及び搬送速度条件判定部61を備えている。
【0034】
電子線発生装置監視部52は、格納部59の記録数値と検出数値を比較し良否を判断し、また電流検出器によって検出されるビーム電流が所定の範囲内に収まっているか否かにより良否を判断する。
【0035】
スキャン条件判定部53は、格納部59を参照して、電子線走査部42が電子線を走査するために用いる制御値であるスキャン周波数が所定の範囲に収まっているか否かを判断する。
【0036】
スキャン幅判定部54は、格納部59を参照して、電子線走査部42が電子線を走査するために用いる制御値であるスキャン幅(電子線照射口43において電子線が走査される範囲、又は固定された電子線供給部から供給される電子線を磁界により屈折させて偏向する角度の範囲)が所定の範囲に収まっているか否かを判断する。スキャン幅判定部54は更に、ビームセンサ44から電子線検出信号を受信する。
【0037】
搬送速度検知部55は、格納部59を参照して、制御部46が搬送装置20を駆動するために用いる速度の制御値である搬送速度が所定の範囲に収まっているか否かを判断する。
【0038】
図5は本実施の形態における電子線殺菌システムの動作を示すフローチャートである。以下の説明において、コンピュータ51が備える演算処理装置71が電子線照射条件判断部50に格納されているプログラムを読み出し、そのプログラムに記述された手順に従って実行する動作は、プログラム自身が行う動作として記述される。
【0039】
本実施の形態に係る電子線殺菌検査システムの動作は、電子線を照射するステップ(ステップS10)、電子線の照射条件を取得する照射条件取得ステップ(ステップS20)、取得された照射条件の適正性を判断する判断ステップ(ステップS30)、及び不良品を除去するステップ(ステップS40)を備えている。
【0040】
(ステップS10)
電子線供給部41は電子線を生成する。電子線走査部42は生成された電子線を周期的に偏向して走査する。電子線照射口43から搬送装置20上の食品容器に向けて電子線が照射される。搬送装置20が駆動される。食品容器10が入口2から搬入される。食品容器10は搬送装置20によって殺菌部40に搬送されて電子線照射装置30により電子線を照射される。
【0041】
図6は照射条件取得ステップ(ステップS20)の動作を示すフローチャートである。(ステップS21)
電子線発生装置監視部52は、電流検知器、例えばCTによって検出されるビーム電流の電流値を検知してRAM72に保存する。電子線発生装置監視部52は更に、加速電圧を制御するために用いられる加速電圧制御値を取得してRAM72に保存する。
【0042】
(ステップS22)
スキャン条件監視部53は、電子線走査部42のスキャン周波数を制御するために用いられるスキャン周波数制御値を取得してRAM72に保存する。スキャン情報監視部53は更に、スキャン幅を制御するために用いられるスキャン幅制御値を取得してRAM72に保存する。
【0043】
(ステップS23)
スキャン幅判定部54は、ビームセンサ44から電子線検出信号を受信し、所期のスキャン幅にビームが走査されたか否かを示す判断情報をRAM72に保存する。
【0044】
(ステップS24)
搬送速度検知部55は、搬送装置20を駆動するために用いられる搬送速度制御値を制御部46から取得してRAM72に保存する。
【0045】
図7は、照射条件判断ステップ(S30)の動作を示すフローチャートである。
(ステップS31)
電子線発生装置監視部52は、格納部59を参照して、ステップS21において保存されたビーム電流の電流値が所定の範囲に収まっていない場合、位置モニタリング装置58に除去信号を発信する。電子線発生装置監視部52は更に、格納部59を参照して、ステップS21において取得された加速電圧制御値が所定の範囲に収まっていない場合、位置モニタリング装置58に除去信号を発信する。
【0046】
(ステップS32)
スキャン条件監視部53は、格納部59を参照して、ステップS22において保存されたスキャン周波数制御値が所定の範囲に収まっていない場合、位置モニタリング装置58に除去信号を発信する。スキャン条件監視部53は更に、格納部59を参照して、ステップS22において保存されたスキャン幅制御値が所定の範囲に収まっていない場合、位置モニタリング装置58に除去信号を発信する。
【0047】
(ステップS33)
スキャン幅判定部54は、格納部59を参照して、ステップS23において保存されたスキャン幅が所定の範囲に収まっていない場合、位置モニタリング装置58に除去信号を発信する。スキャン幅判定部54は更に、ステップS22において保存されたスキャン幅制御値とステップS23において保存されたスキャン幅との整合性を判定し、整合しない場合は位置モニタリング装置58に除去信号を発信する。
【0048】
(ステップS34)
搬送速度条件判定部61は、格納部59を参照して、ステップS24において保存された搬送速度制御値が所定の範囲に収まっているか否かを判定する。所定の範囲におさまっている場合、処理はステップS35に移行する。所定の範囲に収まっていない場合、処理はステップS36に移行する。
【0049】
(ステップS35)
スキャン条件監視部53は、格納部59を参照して、ステップS22において保存されたスキャン周波数制御値が所定の範囲に収まっていない場合、位置モニタリング装置58に除去信号を発信する。
【0050】
(ステップS36)
走査制御値調節部57は、格納部59のスキャン周波数‐搬送速度関係データ56を参照し、ステップS24において保存された搬送速度制御値に対応するスキャン周波数制御値を算出する。走査制御値調節部57は、算出されたスキャン周波数制御値を電子線走査部42に発信する。電子線走査部42は、受信したスキャン周波数制御値を用いて電子線のスキャン周波数を調節する。
【0051】
ステップS36の処理によって、例えば搬送装置20の起動時や緊急的に搬送速度が変更される場合、その搬送速度の変化に応答してスキャン周波数が変更されることにより、食品容器10に照射される電子線の照射量が適正な範囲内に収まる。
【0052】
搬送速度20が所定範囲に入る場合にビーム電流又は加速電圧を変更することも可能だが、照射量を望む範囲に制御するためにはスキャン周波数を変更することが容易であり望ましい。
【0053】
本実施の形態における電子線殺菌システムは、電子線の照射量が適切に制御されることにより、次のように格別の効果を奏する。すなわち、電子線殺菌においては、対象物に電子線が照射されたとき、電子線の照射量と対象物に微生物が残存する割合との間には、一定の関係がある。そのため、電子線の照射量を適正な範囲に制御することにより、所望の程度まで殺菌が達成されたことが期待できる。
【0054】
こうした特性は、薬剤を用いた殺菌システムの場合と異なる。薬剤を用いた殺菌システムでは通常、望まれる程度で殺菌が行われていることを確認するために、対象物をサンプルとして微生物を培養し、繁殖の程度を観察する。本実施の形態における電子線殺菌では、確実に適正範囲の電子線を対象物に照射することにより、望まれる程度での殺菌を実行できる。また、適正でない食品容器に対して充填不要として判断し、充填せずに除去が可能となる。これにより、電子線殺菌の特性を活かして、定量的な信頼性のある殺菌が実現される。
【符号の説明】
【0055】
2…入口
3…殺菌室
4…すすぎリンサ室
5…充填室
6…キャッパ室
7…制御装置
8…すすぎリンサ
9…充填装置
10…食品容器
11…キャッパ装置
20…搬送装置
30…電子線照射装置
40…殺菌部
41…電子線供給部
42…電子線走査部
43…電子線照射口
44…ビームセンサ
46…制御部
50…電子線照射条件判断部
51…コンピュータ
52…電子線発生装置監視部
53…スキャン条件監視部
54…スキャン幅判定部
55…搬送速度検知部56…スキャン周波数‐搬送速度関係データ
57…走査制御値調節部
58…位置モニタリング装置
59…格納部
60…不良品除去装置
61…搬送速度条件判定部
71…演算処理装置
72…RAM
73…ROM
【特許請求の範囲】
【請求項1】
搬送装置と、
前記搬送装置によって搬送される食品容器に電子線を照射する電子線照射装置と、
前記電子線照射装置の制御値が適正であるための条件を記憶する格納部と、
前記制御値が前記条件を満たしているか否かを判断する判断部とを具備し、
前記電子線照射装置は電子線を走査する電子線走査部を備え、
前記条件は、前記電子線走査部を制御するために用いられる走査制御値の条件を含み、
前記走査制御値はスキャン周波数である
電子線殺菌システム。
【請求項2】
搬送装置と、
前記搬送装置によって搬送される食品容器に電子線を照射する電子線照射装置と、
前記電子線照射装置の制御値が適正であるための条件を記憶する格納部と、
前記制御値が前記条件を満たしているか否かを判断する判断部とを具備し
前記電子線照射装置は電子線を走査する電子線走査部を備え、
前記条件は、前記電子線走査部を制御するために用いられる走査制御値の条件を含み、
前記走査制御値はスキャン幅であり、
更に、前記電子線照射装置による電子線の照射範囲内に設けられ、電子線が照射されているか否かを示す検出信号を出力するビームセンサと、
前記走査制御値に示されるスキャン幅と前記検出信号とを照合して整合性を判定するスキャン幅判定部とを具備する
電子線殺菌システム。
【請求項3】
搬送装置と、
前記搬送装置によって搬送される食品容器に電子線を照射する電子線照射装置と、
前記電子線照射装置の制御値が適正であるための条件を記憶する格納部と、
前記制御値が前記条件を満たしているか否かを判断する判断部とを具備し
前記電子線照射装置は電子線を走査する電子線走査部を備え、
前記条件は、前記電子線走査部を制御するために用いられる走査制御値の条件を含み、
更に、前記搬送装置によって搬送される前記食品容器の搬送速度を検知する搬送速度検知部と、
前記搬送速度が所定の速度条件を満たしているか否かを判定する搬送速度条件判定部とを具備し、
前記格納部は、前記搬送速度と前記走査制御値との関係を指定するスキャン周波数‐搬送速度関係データを記憶し、
更に、前記スキャン周波数‐搬送速度関係データに基づいて前記搬送速度検知部が検知した搬送速度から得られる前記走査制御値を用いて前記電子線走査部を制御する走査制御値調節部を具備する
電子線殺菌システム。
【請求項4】
請求項1乃至3のいずれかに記載された電子線殺菌システムであって、
更に、前記判断部により前記制御値が前記条件を満たしていないと判断された前記食品
容器を除去する不良品除去装置
を具備する
電子線殺菌システム。
【請求項5】
請求項1乃至4のいずれかに記載された電子線殺菌システムであって、
前記条件は、前記電子線照射装置の加速電圧の許容範囲を含む
電子線殺菌システム。
【請求項1】
搬送装置と、
前記搬送装置によって搬送される食品容器に電子線を照射する電子線照射装置と、
前記電子線照射装置の制御値が適正であるための条件を記憶する格納部と、
前記制御値が前記条件を満たしているか否かを判断する判断部とを具備し、
前記電子線照射装置は電子線を走査する電子線走査部を備え、
前記条件は、前記電子線走査部を制御するために用いられる走査制御値の条件を含み、
前記走査制御値はスキャン周波数である
電子線殺菌システム。
【請求項2】
搬送装置と、
前記搬送装置によって搬送される食品容器に電子線を照射する電子線照射装置と、
前記電子線照射装置の制御値が適正であるための条件を記憶する格納部と、
前記制御値が前記条件を満たしているか否かを判断する判断部とを具備し
前記電子線照射装置は電子線を走査する電子線走査部を備え、
前記条件は、前記電子線走査部を制御するために用いられる走査制御値の条件を含み、
前記走査制御値はスキャン幅であり、
更に、前記電子線照射装置による電子線の照射範囲内に設けられ、電子線が照射されているか否かを示す検出信号を出力するビームセンサと、
前記走査制御値に示されるスキャン幅と前記検出信号とを照合して整合性を判定するスキャン幅判定部とを具備する
電子線殺菌システム。
【請求項3】
搬送装置と、
前記搬送装置によって搬送される食品容器に電子線を照射する電子線照射装置と、
前記電子線照射装置の制御値が適正であるための条件を記憶する格納部と、
前記制御値が前記条件を満たしているか否かを判断する判断部とを具備し
前記電子線照射装置は電子線を走査する電子線走査部を備え、
前記条件は、前記電子線走査部を制御するために用いられる走査制御値の条件を含み、
更に、前記搬送装置によって搬送される前記食品容器の搬送速度を検知する搬送速度検知部と、
前記搬送速度が所定の速度条件を満たしているか否かを判定する搬送速度条件判定部とを具備し、
前記格納部は、前記搬送速度と前記走査制御値との関係を指定するスキャン周波数‐搬送速度関係データを記憶し、
更に、前記スキャン周波数‐搬送速度関係データに基づいて前記搬送速度検知部が検知した搬送速度から得られる前記走査制御値を用いて前記電子線走査部を制御する走査制御値調節部を具備する
電子線殺菌システム。
【請求項4】
請求項1乃至3のいずれかに記載された電子線殺菌システムであって、
更に、前記判断部により前記制御値が前記条件を満たしていないと判断された前記食品
容器を除去する不良品除去装置
を具備する
電子線殺菌システム。
【請求項5】
請求項1乃至4のいずれかに記載された電子線殺菌システムであって、
前記条件は、前記電子線照射装置の加速電圧の許容範囲を含む
電子線殺菌システム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2011−251771(P2011−251771A)
【公開日】平成23年12月15日(2011.12.15)
【国際特許分類】
【出願番号】特願2011−185267(P2011−185267)
【出願日】平成23年8月26日(2011.8.26)
【分割の表示】特願2005−319405(P2005−319405)の分割
【原出願日】平成17年11月2日(2005.11.2)
【出願人】(000006208)三菱重工業株式会社 (10,378)
【Fターム(参考)】
【公開日】平成23年12月15日(2011.12.15)
【国際特許分類】
【出願日】平成23年8月26日(2011.8.26)
【分割の表示】特願2005−319405(P2005−319405)の分割
【原出願日】平成17年11月2日(2005.11.2)
【出願人】(000006208)三菱重工業株式会社 (10,378)
【Fターム(参考)】
[ Back to top ]