
電子血圧計
【課題】従来の電子血圧計においては、加圧を開始してから脈波間隔の認識のために予め脈拍の遅い人でも脈波が7拍得られる遅い速度で加圧せざるおえないため、測定時間を十分短縮することができないという問題があった。
【解決手段】生体の一部に装着されるカフを加圧し、加圧中のカフ圧に重畳した脈波信号に基づいて血圧を算出する電子血圧計において、カフを加圧する前に測定部位(カフを装着した腕部)の位置を検出し、測定部位が血圧測定の適正位置にあるか否かを検出しているときに得られる被測定者の脈拍数(脈拍間隔)によって加圧速度を設定する。
【解決手段】生体の一部に装着されるカフを加圧し、加圧中のカフ圧に重畳した脈波信号に基づいて血圧を算出する電子血圧計において、カフを加圧する前に測定部位(カフを装着した腕部)の位置を検出し、測定部位が血圧測定の適正位置にあるか否かを検出しているときに得られる被測定者の脈拍数(脈拍間隔)によって加圧速度を設定する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、被測定部位に装着したカフを加圧しているときに検出される脈波から血圧測定を行う加圧時測定方式の電子血圧計に関する。
【背景技術】
【0002】
現在、電子血圧計には、様々な測定方式がある。その一つにオシロメトリック方式という測定方式がある。
【0003】
オシロメトリック方式の血圧計は、腕部や脚部に巻回されたカフを一定速度で加圧又は減圧した際にカフ圧に重畳する脈波の出現、ピーク、消失の関係から血圧値を算出するものである。
【0004】
一定速度で減圧しているときに測定を行う減圧時測定方式では、カフを一旦脈波が消失する圧力まで加圧して、その後に減圧させたときに脈波を検出して血圧値を算出している。
【0005】
一方、一定速度で加圧しているときに測定を行う加圧時測定方式では、カフを加圧していく過程で検出される脈波に基づいて血圧値を算出している。
【0006】
ところで、正確に血圧値を算出するには、最低7拍程度の脈波情報が必要で、通常、個人差を考慮した上で、7拍程度の脈波が得られる速度で圧力変化を制御する。
【0007】
減圧時測定方式は、最初の加圧過程で粗く対象者の脈拍情報を検知しておき、被験者の脈拍間隔時間に応じて、「脈拍の遅い人は遅く減圧」、「脈拍の速い人は早く減圧」させる事により平均的な測定時間を短縮させる事が出来る。
【0008】
一方、加圧時測定方式は、最初から測定状態として加圧する。つまり、加圧時測定方式は、対象者の脈拍の事前情報が無い状態から加圧測定に入る。このため、被験者の脈拍間隔の個人差に合わせた加圧を行うことができず、脈拍の遅い被験者でも脈波が7拍得られる遅い速度で加圧する必要があった。
【0009】
そこで、加圧時測定方式の血圧計において、加圧を開始してから加圧の初期段階で被験者の脈拍間隔を判定して、途中から最適な加圧速度に切り換えることによって最適な加圧速度で測定可能とすることを可能とする技術が提案されている(特許文献1)。
【先行技術文献】
【特許文献】
【0010】
【特許文献1】特開平9−299340号公報
【発明の概要】
【発明が解決しようとする課題】
【0011】
特許文献1に記載された血圧計においては、脈拍間隔を認識するためには、最低3拍の脈波情報が必要となり、実際に血圧決定に必要な7拍分の脈波のうち約半分に相当する期間を脈波間隔の認識のために予め脈拍の遅い人でも脈波が7拍得られる遅い速度で加圧せざるおえないため、測定時間を十分短縮することができないという問題があった。
【0012】
本発明の目的は、上記の問題を解決し、加圧開始から最適な加圧速度でカフを加圧して
測定可能な電子血圧計を提供することにある。
【課題を解決するための手段】
【0013】
上記課題を解決するため、本発明の加圧時測定式血圧計は、生体の一部に装着されるカフを加圧し、加圧中のカフ圧に重畳した脈波信号に基づいて血圧を算出する電子血圧計において、カフの加圧前に検出した被測定者の生体情報に基づいてカフの加圧速度を設定する加圧速度設定手段を有することを特徴とする。
【0014】
また、本発明の加圧時測定式血圧計は、被測定者の生体情報に基づいてカフを装着した測定部位の位置を検出する位置検出手段を有し、加圧速度設定手段は、位置検出手段が測定部位の位置を検出している間に検出した生体情報に基づいてカフの加圧速度を設定することを特徴とする。
【0015】
また、本発明の加圧時測定式血圧計は、血圧測定の制御を行う血圧測定制御手段を有し、位置検出手段が、測定部位が適正位置へ移動したと判定すると、血圧測定制御手段は、加圧速度設定手段によって設定された加圧速度でカフを加圧して血圧測定を開始することを特徴とする。
【0016】
また、本発明の加圧時測定式血圧計の位置検出手段は、マイクロ波発生器とマイクロ波受信器とを備え、マイクロ波発生器より被測定者にマイクロ波を照射し、マイクロ波受信器により被測定者の生体の動きによってドップラシフトした反射波を検出して、該反射波により測定部位の位置を検出することを特徴とする
また、本発明の加圧時測定式血圧計の位置検出手段は、カフを装着した測定部位が胸部前面へ移動する第1の移動状態を検出する第1の移動検出手段と、カフを装着した測定部位の胸部前面での適正位置へ移動する第2の移動状態を検出する第2の移動検出手段と、をさらに備え、第1の移動検出手段により第1の移動状態が終了したと判定された後に第2の検出手段により第2の移動状態を検出することを特徴とする。
【0017】
また、本発明の加圧時測定式血圧計の加圧速度設定手段は、第2の移動状態を検出しているときに位置検出手段が検出する脈波を用いてカフの加速度を設定することを特徴とする。
【0018】
また、本発明の加圧時測定式血圧計は、第2の移動検出手段により第2の移動状態の検出が終了したことによって、位置検出手段が、測定部位の適正位置への移動が完了したと判定することを特徴とする。
【発明の効果】
【0019】
本発明の電子血圧計によれば、加圧開始から最適な加圧速度で加圧して測定することで測定時間を短縮することができる。
【図面の簡単な説明】
【0020】
【図1】本発明の電子血圧計の実施形態の外観を示す図ある。
【図2】本発明の電子血圧計の実施形態の構成を示す機能ブロック図である。
【図3】第1の移動状態及び第2の移動状態を説明する図である。
【図4】本発明の電子血圧計の実施形態の動作を説明する波形図である。
【図5】本発明の電子血圧計の実施形態の加圧速度の設定例を示す図である。
【図6】本発明の電子血圧計の実施形態の動作を示すフローチャートである。
【発明を実施するための形態】
【0021】
本発明の電子血圧計は、カフを加圧する前に得られる被測定者の生体情報によってカフ
の加圧速度を設定する。
【0022】
電子血圧計は、カフを加圧する前に測定部位(カフを装着した腕部)の位置を検出し、測定部位が血圧測定の適正位置にあるか否かを検出しているときに得られる被測定者の脈拍数(脈拍間隔)によって加圧速度を設定する。
【0023】
電子血圧計は、測定部位が適正位置にあると判定されると設定された加圧速度でカフを加圧して血圧測定を行う。なお、血圧測定の適正位置とは、身体の血圧測定部位と心臓とが同一の高さとなる位置を言う。
【0024】
本発明の電子血圧計は、マイクロ波ドップラセンサを用いて、被測定者の身体にマイクロ波を照射し、その反射波を受信することで血圧測定における測定部位の適正位置を検出する。また、マイクロ波の反射波から、被測定者の脈拍数や脈拍間隔などの生体情報も測定することができる。これらの生体情報により、血圧測定に適した加圧速度を算出して血圧測定を行う。
【0025】
電子血圧計は、血圧測定開始時に電子血圧計のカフを装着した腕部(例えば、手首)が身体に対してどの位置(腕を下げているのか、持ち上げているのかなど)にあるか分からない。その状態から、カフを装着した腕部を適正位置に移動させるためにマイクロ波ドップラセンサから得られる信号を処理してカフを装着した腕部の位置を検出する。
【0026】
まず、第1の移動検出手段は、得られた信号が所定の値を超える飽和振幅の回数で大きな腕部の移動状態を検出する。
【0027】
次に、第2の移動状態検出手段は、得られた信号をフーリエ変換した周波数成分の分布から基本波(ピーク値)が所定の周波数閾値範囲に入っているか否か(脈拍や呼吸が正常に検出されたか否か)でカフを装着した腕部が適正位置にあるか否かを検出する。このとき、基本波から脈拍数も測定する。
【0028】
そして、カフを装着した腕部が適正位置にあると判定されると、第2の移動状態を検出しているときに測定された脈拍数によって設定した加圧速度でカフを加圧して血圧測定を行う。
【0029】
本発明の電子血圧計は、カフを加圧する前のカフを装着した腕部が適正位置にあるか否かを検出しているときに得られる脈拍の情報に基づいてカフの加圧速度を設定して血圧測定を行うので、被測定者に適した最適な加圧速度で加圧して測定することでき測定時間を短縮することができる。
【0030】
以下、本発明の電子血圧計を図面を用いて詳述する。
【0031】
なお、以下の説明にあっては、電子血圧計は、カフおよびマイクロ波ドップラセンサと血圧測定部とが一体となる構成を例にして説明するが、電子血圧計は、血圧を測定する部位に装着するカフとマイクロ波ドップラセンサとが一体に構成されていれば、血圧測定制御部や報知手段などを搭載した血圧測定部とカフとは、一体であっても別体であってもよい。
【実施例1】
【0032】
以下、図1から図6を用いて本発明の電子血圧計の実施形態を詳述する。なお、説明においては、電子血圧計を主に左手首に装着した場合を例に説明を行う。
【0033】
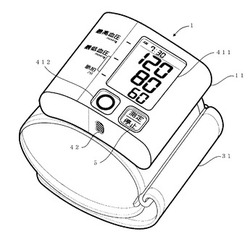
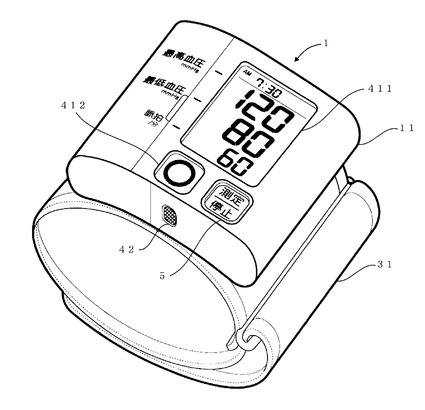
図1は、本発明の電子血圧計の外観を示す図である。
【0034】
電子血圧計1は、血圧計本体11とカフ31で構成されている。血圧計本体11は、血圧測定に必要な構成を内部に備えている。また、血圧計本体11は、後に詳述する主表示部411、副表示部412、報知部42および操作部5などを有している。
【0035】
[電子血圧計の構成説明:図2]
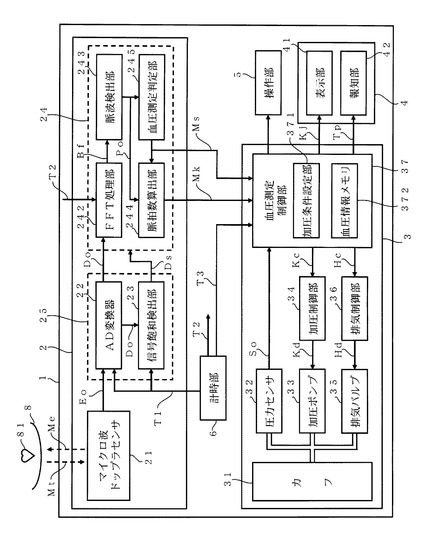
図2は、電子血圧計の構成を説明する機能ブロック図である。
【0036】
図2において、電子血圧計1は、血圧測定部位が心臓の高さに対して適正か否かを検出する適正位置検出手段2と、血圧を測定する血圧測定手段3と、測定結果を視覚的に表示する表示部41及びアラーム音や音声といった音響手段で報知する報知部42を備える報知手段4と、操作部5と、日時などの時刻情報を生成する計時部6とを有している。
【0037】
[適正位置検出手段2の説明]
まず、適正位置検出手段2の構成を説明する。
【0038】
図2に示すように、適正位置検出手段2は、マイクロ波ドップラセンサ21、第1の移動検出手段25および第2の移動検出手段24とで構成されている。
【0039】
マイクロ波ドップラセンサ21は、一般的なマイクロ波ドップラセンサを用いることができる。マイクロ波ドップラセンサには、その出力信号がアナログ信号のものとデジタル信号のものとがありどちらを用いてもよい。マイクロ波ドップラセンサ21にはアナログ信号をデジタル信号に変換するAD変換器を搭載していない例で説明をする。
【0040】
マイクロ波ドップラセンサ21は、例えば、約2.5GHzのマイクロ波を発射するマイクロ波発信器(図示しない)と、照射したマイクロ波を受信するマイクロ波受信器(図示しない)と、マイクロ波ドップラ復調器(図示しない)とで構成されている。
【0041】
マイクロ波発信器から発射されたマイクロ波Meは、一部が被測定者8の中に入り心臓81で反射して反射波Mtとなって、再び被測定者8を経由してマイクロ波受信器で受信される。
【0042】
マイクロ波発信器は、発信したマイクロ波Meに相当する電気信号である送信マイクロ波信号Emeをマイクロ波ドップラ復調器に出力する。マイクロ波受信器は、受信した反射波Mtに相当する電気信号である受信マイクロ波信号Emtをマイクロ波ドップラ復調器に出力する。
【0043】
マイクロ波ドップラ復調器は、送信マイクロ波信号Emeと受信マイクロ波信号Emtとから、2つの信号の位相差信号である電気信号を、電気信号Eoとして出力する。
【0044】
マイクロ波受信器が受信した反射波Mtには、心臓の動きに対応したドップラシフトによってマイクロ波発信器から発射されたマイクロ波Meに対して位相差が生じる。ドップラシフトによるマイクロ波の位相差を送信マイクロ波信号Emeと受信マイクロ波信号Emtとからマイクロ波ドップラ復調器により電気信号Eoに変換することで心臓の動きを検出することが可能となる。
【0045】
第1の移動検出手段25は、AD変換器22と、信号飽和検出部23とで構成されている。
【0046】
AD変換器22は、計時部6からの第1の時間情報T1に基づきマイクロ波ドップラセンサ21の出力である電気信号Eoをデジタル信号Doに変換する変換器である。
【0047】
信号飽和検出部23は、デジタル信号Doが飽和状態になったことを検出し第1の移動状態が終了したことを告げる第1の移動状態終了信号Dsを出力する。
【0048】
第2の移動検出手段24は、FFT(Fast Fourier Transform:高速フーリエ変換)処理部242と、脈波検出部243と、血圧測定判定部245と、脈拍数算出部244と、で構成されている。
【0049】
FFT処理部242は、計時部6からの第2の時間情報T2に基づきデジタル信号Doを所定時間蓄積してFFT処理により周波数スペクトラム情報である基本波Bfを出力する。
【0050】
脈波検出部243は、基本波Bfを入力して脈波データPoを出力する。血圧測定判部245は、脈波データPoを入力して適正位置検出信号Msを出力する。
【0051】
脈拍数算出部244は、脈波データPoから脈拍数を算出し、脈拍数信号Mkを出力する。脈拍数(bpm)の算出は、脈拍の周波数である脈波データPo(Hz)を1/60倍することで算出する。
【0052】
計時部6は、水晶振動子などを用いて所定の周波数のクロック信号を出力する源振クロック部、クロック信号を分周して所定の分周信号を生成する分周回路部、分周信号から時刻情報を生成する時刻生成部などで構成することができる。これらの構成は公知の時計回路などで広く知られているものであるから、詳細な説明は省略する。
【0053】
計時部6からは、第1の時間情報T1、第2の時間情報T2、第3の時間情報T3を出力する。第1の時間情報T1は、AD変換器22のサンプリング時間を決めるための時刻情報を有しており、例えば、パルス周期を10msecとした信号である。第2の時間情報T2は、FFT処理部にデジタル信号Doを蓄積する所定時間を得るための時刻情報を有しており、例えば、周期を10〜30secとしたパルス信号である。第3の時間情報T3は、血圧測定を行なったときの日付や時間情報を有する時刻情報である。
【0054】
[血圧測定手段3の構成説明]
次に、血圧測定手段3の構成を説明する。
【0055】
血圧測定手段3は、カフ31と、圧力センサ32と、加圧ポンプ33と、加圧制御部34と、排気バルブ35と、排気制御部36と、血圧測定制御部37と、で構成されている。
【0056】
カフ31は、手首の橈骨動脈を加圧して血流を阻止するための帯状の部材である。
【0057】
圧力センサ32は、カフ31の圧力を電気信号に変換して圧力信号Soとして出力する。加圧ポンプ33は、カフ31を加圧するためのポンプである。加圧制御部34は、血圧測定制御部37からの加圧制御信号Kcに基づき加圧駆動信号Kdを出力し加圧ポンプ33を駆動する。
【0058】
排気バルブ35は、カフ31の圧力を所定の割合で排気するためのバルブである。排気制御部36は、血圧測定制御部37からの排気制御信号Hcに基づき排気駆動信号Hdを出力し排気バルブ35を制御する。
【0059】
血圧測定制御部37は、電子血圧計1の動作を全般的に制御管理する。具体的には、血圧測定制御部37は、圧力信号Soと、適正位置検出信号Msとから血圧情報Kjおよび適正報知信号Tpを出力する。血圧情報Kjは、最高血圧値、最低血圧値、脈拍数、血圧測定時の時刻情報および適正位置検出信号Msなどを含む情報である。適正報知信号Tpは、適正位置検出信号Msからなる適正位置情報である。
【0060】
血圧測定制御部37の血圧情報メモリ372は、その血圧情報Kjを記憶するためのメモリ手段である。
【0061】
なお、この血圧測定制御部37の構成は特に限定されないが、ワンチップマイクロコンピュータなどで構成すると、小型で低消費電力化ができるので便利である。
【0062】
[報知手段4の構成説明:図1、2]
次に、図1および図2を用いて報知手段4の構成を説明する。
【0063】
報知手段4は、電子血圧計1が測定した血圧値を表示したり、血圧測定部位が心臓の高さと同一となる適正位置にあるか否かを報知したりするものである。報知手段4は、表示部41と報知部42とから構成されている。表示部41は、血圧測定制御部37が出力する最高血圧値、最低血圧値、脈拍数および血圧測定時の時刻情報などの血圧情報Kjを表示する主表示部411と適正位置のレベルを表示する副表示部412とから構成することができる。報知部42は、音声や音や振動で被測定者に電子血圧計1の血圧測定部位が測定の適正位置にあるか否か報知する。
【0064】
副表示部412は、適正位置検出信号Msのレベルに応じたマークや光で報知する。例えば、適正位置検出信号Msのレベルを3段階とすると、適正位置であるときをレベル3として「○」を表示し、やや適正位置からずれているときをレベル2として「△」を表示し、適正位置から大幅にずれているときをレベル1として「×」を表示するような、複数のマークによる表示を行なうようにしてもよい。
【0065】
3段階のレベルは、例えば次のように決めることができる。
【0066】
適正位置であるレベル3は、電子血圧計1の血圧測定部位が、心臓右心房から±1cm未満の範囲に入っているとき。やや適正位置からずれているレベル2は、電子血圧計1の血圧測定部位が、心臓右心房から±1cm以上から±5cm未満の範囲に入っているとき。適正位置から大幅にずれているレベル1は、電子血圧計1の血圧測定部位が、心臓右心房から±5cm以上の範囲にあるとき。
【0067】
それぞれのレベルは、デジタル信号Doや脈波データPoの振幅にそれぞれのレベルに応じた複数の閾値を設け、閾値を超えているか否かで判定すればよい。
【0068】
また、LED光の色でレベルを表示するようにしてもよい。例えば、レベル3を「青」、レベル2を「黄」、レベル1を「赤」などとしてもよい。もちろん、マークや光を組み合わせて表示してもかまわない。
【0069】
図1に示す例では、主表示部41は、測定結果の例として最高血圧値120mmHg、最低血圧値80mmHg、脈拍数60bpmおよび測定時刻AM7:30を表示している。
【0070】
また、図1に示す例は、マークを用いて適正位置を報知する場合である。図1の副表示
部412は、適正位置検出信号Msがレベル3の場合であり「〇」マークを表示している。
【0071】
報知部42は、ダイナミックスピーカやピエゾ音響素子などで構成することができる。アラーム音や音声で報知することができる。音声は、例えば「血圧計の位置が適正位置です」又は「血圧計の位置が適切位置ではありません」などとすることができる。
【0072】
このように、光やマーク、又は音声で適正位置に導くように案内することができるので、被測定者は電子血圧計を正しく適正位置にもって行くことができる。
【0073】
血圧測定時は、リラックスした姿勢で望むのがよいとされているから、電子血圧計を胸部前面に位置しているときに、このように音声やアラーム音でその状況を報知できれば、首を下に向けるなどする必要も無く、リラックスした姿勢を維持できて便利である。
【0074】
[腕の移動状態の説明:図3]
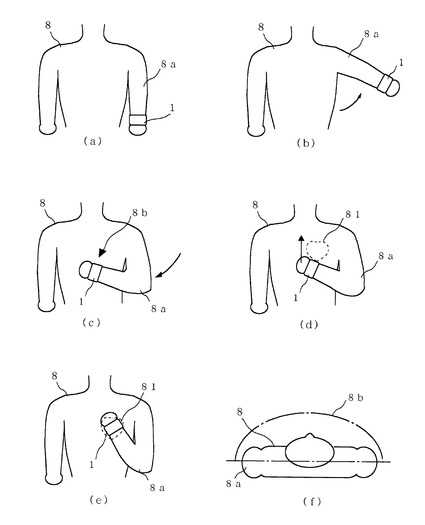
次に、図3を用いて適正位置検出手段2の第1の移動検出手段25と第2の移動検出手段24とが検出する腕の移動状態を説明する。
【0075】
図3(a)から図3(e)は、電子血圧計1を被測定者8の左腕8aの手首に装着し、血圧測定を開始するまでの腕の移動状態を模式的に表した図である。図3(f)は、被測定者を頭頂部より見下ろした状態を示す図であり、被測定者の胸部前面を説明する図である。
【0076】
図3(a)は、電子血圧計1を左手首に装着し、右手で操作部5のスイッチを操作して血圧測定を開始したときの状態である。
【0077】
図3(b)と図3(c)は、腕(電子血圧計)の第1の移動状態を示す図である。被測定者は、図3(b)に示す矢印のように徐々に左腕を移動させ、図3(c)に示す矢印のように、電子血圧計1が被測定者8の胸部前面8bに移動するようにする。
【0078】
ここで、胸部前面8bは、図3(f)に示すように、身体の前面という意味を含む概念である。心臓は、左胸か左胸よりやや右寄りにある場合が多いから、心臓の鼓動を検出するときは、左胸前が適している。しかし、マイクロ波ドップラセンサ21を用いているために、正確に左胸前でなくとも心臓の鼓動を検出することができる。例えば、左胸斜め横側(左わき腹の上、脇の下のやや下位置)、胸中央、被測定者によっては右胸前であっても検出することができる。したがって、発明者は胸部前面という範囲を図3(f)に示す胸部前面8bのエリアとして定義する。
【0079】
図3(d)は、移動状態が第2の移動状態を示す図である。被測定者は、図3(c)電子血圧計1が胸部前面8bの位置から、図3(d)に示す矢印のように心臓81と同じ高さになる適正位置までさらに腕を移動させる。
【0080】
図3(e)は、電子血圧計1と心臓81との高さが同一となり、適正位置になった状態を示している。
【0081】
電子血圧計1が第1の移動状態にあるときは、電子血圧計1自体が大きく動いている状態である。また、第2の移動状態にあるときは、電子血圧計1は小さく動いている状態である。
【0082】
詳しくは後述するが、第1の移動状態であるときは、マイクロ波ドップラセンサ21か
ら出力される電気信号Eoの振幅を用いて第1の移動状態を検出し、第2の移動状態にあるときは、電気信号Eoに含まれる信号の周波数成分を用いて脈波を検出し、脈波により適正位置を見つけるのである。
【0083】
以下の説明において、マイクロ波ドップラセンサ21を用い、電気信号Eoから生体の動きを検出する手法を「マイクロ波センシング」と略記する。
【0084】
[実施形態の動作説明:図2〜4]
次に、図2〜4を用いて電子血圧計の動作を説明する。
【0085】
まず、適正位置検出手段2の動作説明を行なう。
【0086】
図2において、被測定者8が電子血圧計1を手首(図示せず)に装着し操作部の測定開始スイッチを押すと、マイクロ波ドップラセンサ21は、約2.5GHzのマイクロ波Meを発信し、被測定者8で反射され、反射波Mtとしてマイクロ波受信器212で受信する。
【0087】
マイクロ波ドップラセンサ21は、マイクロ波Meに基づく送信マイクロ波信号Emeと、反射波Mtに基づく受信マイクロ波信号Emtとによる電気信号Eoを第1の移動検出手段25のAD変換器22に出力する。
【0088】
AD変換器22は、電気信号EoをAD変換して時系列のデジタル信号Doとして信号飽和検出部23及び第2の移動検出手段24に出力する。
【0089】
信号飽和検出部23は、デジタル信号Doを入力して、デジタル信号Doのデータ変化量が、所定の振幅範囲を予め定められた回数を超えると、第1の移動状態終了信号Dsを第2の移動検出手段24に出力する。
【0090】
このとき、図示はしないが血圧測定制御部37は、信号飽和検出部23の出力する第1の移動状態終了信号Dsを入力して、報知手段4を制御して音や光あるいは音声で第1の移動状態が終了したことを報知してもよい。
【0091】
第2の移動検出手段24は、デジタル信号Doを入力として適正位置検出信号Msを血圧測定手段3に出力する。
【0092】
第2の移動検出手段24のFFT処理部242は、第2の時間情報T2に基づきデジタル信号Doを所定時間蓄積しFFT処理を行なう。このFFT処理は、入力信号の高速フーリエ変換処理を行なうものである。すなわち、蓄積したデジタル信号Doをフーリエ変換し、個々の信号成分に分解した後、各成分を周波数スペクトラム上に表す処理を行い、基本波Bfとして脈波検出部243に出力する。
【0093】
脈波検出部243は、基本波Bfを入力して、基本波Bfの中の脈拍に係わる周波数帯域の成分を抽出し、脈波データPoとして脈拍数算出部244及び血圧測定判定部245に出力する。
【0094】
脈拍数算出部244は、脈波データPoから脈拍数を算出し、脈拍数信号Mkとして血圧測定手段3に出力する。
【0095】
第1の移動検出手段25の信号飽和検出部23及び第2の移動検出手段24の動作を図3及び図4を用いてさらに詳述する。
【0096】
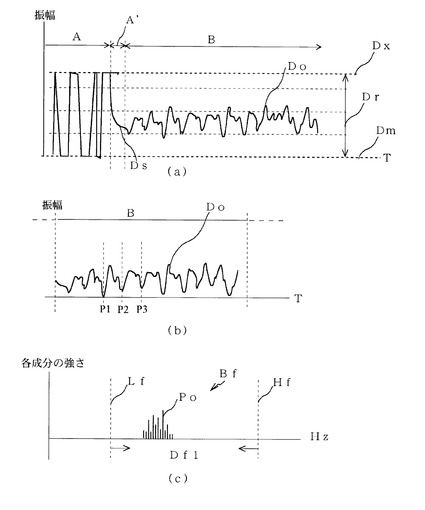
図4は、適正位置検出手段2の第1の移動検出手段25及び第2の移動検出手段24の動作を説明するために模式的に示す波形図である。図4(a)は、横軸に時間Tを、縦軸にデジタル信号Doの振幅を示しており、デジタル信号Do、つまりマイクロ波ドップラセンサ21から出力される信号の時間的変化を表したものである。
【0097】
図4(a)の区間Aは、手首に電子血圧計1を装着し、操作部の測定開始スイッチを押した後、電子血圧計1が被測定者8の胸に近づくときの時間領域を表している。これは、図3(a)から図3(c)に示した第1の移動状態を示している。
【0098】
図4(a)に示すDxは第1の飽和閾値、Dmは第2の飽和閾値を示している。この第1の飽和閾値Dxと第2の飽和閾値Dmとの間が、所定の振幅範囲Drとなっている。また、Dsは第1の移動状態終了信号である。
【0099】
第1の飽和閾値Dx及び第2の飽和閾値Dmは、予め決められた値を使うことができる。2つの閾値で所定の振幅範囲Drを設定する。図4(a)に示す例では、第2の飽和閾値Dmはゼロとしており、いわゆるゼロ飽和閾値となっており、所定の振幅値を閾値とした第1の飽和閾値Dx(いわゆるプラス飽和閾値)との間が所定の振幅範囲Drとなっている。
【0100】
区間A(第1の移動状態)のとき、被測定者8の生体表面でのマイクロ波の反射に、腕の移動が加わるのでドップラシフトが増大し、デジタル信号Doが急激に大きくなる。第1の移動検出手段25の信号飽和検出部23は、デジタル信号Doが所定の振幅範囲Drを超えた回数を計測する。そして、信号飽和検出部23は、所定の振幅範囲Drを超えた回数が所定回数を超えたときに第1の移動状態の最中であることを検出する。所定回数は、予め実験などによりその数を選ぶなどして設定しておくとよい。例えば、所定回数を10回とすると、デジタル信号Doが所定の振幅範囲Drを10回超えると第1の移動状態の最中であることが検出される。
【0101】
図4(a)の区間A´は、図4(a)の区間Aの終わりの部分であって、第1の移動状態が終了したときの時間領域である。
【0102】
図3(a)から図3(c)及び図3(f)を用いて説明したように、腕を大きく動かして被測定者8の胸部前面8bに腕を移動させる第1の移動状態は、電子血圧計1が図3(c)に示す胸部前面8bの心臓に近い位置に来たときに終了する。すなわち、区間A´でデジタル信号Doが所定の振幅範囲Drの範囲内に収まるようになると、腕を大きく動かしていない、つまり第1の移動状態は終了したと判断する。このときのデジタル信号Doを、第1の移動状態終了信号Dsとしている。
【0103】
第2の移動検出手段24は、第1の移動検出手段25から出力されたデジタル信号Doを入力して信号処理をするが、第1の移動状態終了信号Dsが入力されて初めてその処理を開始する。第1の移動状態が終了していないうちに信号処理を開始しないためである。
【0104】
図4(a)の区間Bは、手首を心臓近くに留置した状態の時間領域を示している。これは、図3(d)から図3(e)に示した第2の移動状態を示している。
【0105】
区間Bでは、腕の大きな移動動作が無くなったものの、適正位置を探すために小さく腕を動かしているため、所定の振幅範囲Drを超えないデジタル信号Doが検出される。この区間Bの波形には、心臓の拍動による波形も含まれている。
【0106】
図4(b)は、図4(a)に示す区間Bにおけるデジタル信号Doの一部を拡大して示したものである。この時間領域を区間Dとする。このデジタル信号Doには、検出された被測定者8の心臓の拍動成分が含まれており、例えば、P1,P2,P3である。
【0107】
図4(c)は、FFT処理部242によりデジタル信号Doを高速フーリエ変換処理した波形を模式的に示す図である。X軸が周波数、Y軸を各周波数成分の信号の強さとした周波数スペクトラム分布図である。
【0108】
FFT処理部242は、図4(a)の区間Bにおいて、第2の時間情報T2に基づきデジタル信号Doを所定時間蓄積して高速フーリエ変換を行い、図4(c)に示すような周波数成分の基本波Bfを得る。
【0109】
第2の移動検出手段24の脈波検出部243は、基本波Bfから所定の周波数範囲から脈波データPoを算出する。
【0110】
図4(c)に示すLfは第1の周波数閾値、Hfは第2の周波数閾値である。第1の周波数閾値Lfと第2の周波数閾値Hfとの間が、所定の周波数範囲Df1となっている。この周波数範囲は、脈波を捉える範囲でなければならない。発明者が実験した結果によれば、例えば、第1の周波数閾値Lfを0.5Hz近辺、第2の周波数閾値Hfを3.0Hz近辺とすることで脈波を捉えることができる。
【0111】
脈波検出部243は、基本波Bfのうち、所定の周波数範囲Df1に含まれる周波数スペクトラム分布を脈波データPoとして出力する。
【0112】
血圧測定判定部245は、入力した脈波データPoを分析する。脈波データPoは、周波数成分のスペクトラム分布であるから、その周波数成分やパワー強度、あるいは平均、分散、標準偏差などの統計処理を行なうことができる。血圧測定判定部245は、脈波データPoが正常に検出されていれば、電子血圧計が血圧測定に適正位置にあると判定して第2の移動状態は終了する。このとき、図3(e)に示すように電子血圧計1は心臓81と同一の高さとなる適正位置になっている。そして血圧測定判定部245は、処理結果が血圧測定に適正であることを示す適正位置検出信号Msを血圧測定手段3に出力する。
【0113】
図4(c)に示すように、所定の周波数範囲Df1内の周波数スペクトラム分布が脈波データPoであるから、第1の周波数閾値Lfと第2の周波数閾値Hfとが適する閾値であれば、脈波として適する波形が必ず含まれている。統計処理により、例えば、脈波データPoに含まれる各波形のピークを算出し、そのピークの出現傾向などで脈波を判定してもよい。例えば、2回続けて波形の強さが上がるものを脈波であるとすることができる。
【0114】
そして、血圧測定判定部245は、統計処理した結果で、適正位置かどうかを判定して適正位置検出信号Msを出力する。
【0115】
適正位置検出信号Msは、位置の適正度を表す1,2,3の3段階の数値などを用いることができる。例えば、ピークの強さで適正度を3段階に分けることができる。ピークが最も強いところが適正位置であり、それよりも弱いところが適正位置からややずれている、などと適正度を決めることができる。
【0116】
もちろん、図4(c)の縦軸の各周波数成分の信号の強さに対して1つ又は複数の閾値を設け、その閾値を超えたもので適正度を分けることができる。この場合、その閾値は、事前に設定しておいてもよいし、脈波データPoを統計処理してその出現傾向から閾値を算出して用いるようにしてもよい。
【0117】
すでに説明したように、第2の移動検出手段24の動作は、第1の移動検出手段25の信号飽和検出部23の出力である第1の移動状態終了信号Dsによって制御され、第1の移動状態終了信号Dsが入力されていないと第2の移動検出手段24は動作を行わない。こうすることによって、第1の移動状態検出の後に第2の移動状態検出がなされることが担保される。
【0118】
[血圧測定手段3の動作説明:図2]
次に、図2を用いて血圧測定手段3の動作を説明する。
【0119】
図2において、適正位置検出手段2の血圧測定判定部245は、被測定者8の手首に装着された電子血圧計1の心臓高さに対する位置の適性度を、適正位置検出信号Msとして血圧測定手段3の血圧測定制御部37に出力する。
【0120】
血圧測定制御部37は、報知手段4の表示部41に適正位置検出信号Msを出力する。表示部41の測定条件表示部415の脈拍条件表示部415aには、適正位置検出信号Msの例えば3段階のレベルに応じて「○」,「△」,「×」などのマークを表示する。
【0121】
血圧測定制御部37は、また、報知手段4の報知部42に適正位置検出信号Msを出力する。報知部42は、適正位置検出信号Msによって「血圧計の位置が適正位置です」又は「血圧計の位置が適切位置ではありません」などの音声による報知を行う。
【0122】
報知部42は、ブザー音で適正位置検出信号Msの3段階のレベルに応じて異なる音色で報知することや、振動モータを用いて異なる振動で適正位置検出信号Msの3段階のレベルを報知するなどしてもよい。
【0123】
そして、血圧測定制御部37は、適正位置検出信号Msに基づき以下に述べるように、血圧測定の動作を制御する。
【0124】
電子血圧計1が適正位置であるときをレベル3とすると、血圧測定制御部37は、レベル3の適正位置検出信号Msが入力されると、脈拍数算出部244の脈拍数信号Mkに基づいて加圧条件設定部371により加圧速度の条件を設定する。
【0125】
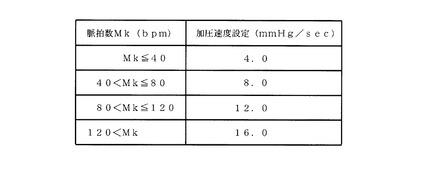
加圧条件設定部371が設定する加圧速度は、図5に示されるように脈拍数が40bpm以下の場合を4.0mmHg/sec、脈拍数が40より大きく80bpm以下の場合を8.0mmHg/sec、脈拍数が80より大きく120bpm以下の場合を12.0mmHg/sec、そして脈拍数が120bpmより大きい場合を16.0mmHg/secの4段階に分けることができる。なお、図5に示す脈拍数による加圧速度の条件は一例であり、加圧中に7拍以上の脈波を確実に検出することができれば上述の例に限られるものではなく様々な条件に設定することができる。
【0126】
加圧条件設定部371に加圧条件が設定されると血圧測定制御部37は、設定された加圧速度で制御されるように加圧制御部34に加圧制御信号Kcを出力する。加圧制御部34は、加圧制御信号Kcに基づいて加圧ポンプ33を駆動する加圧駆動信号Kdを加圧ポンプ33に出力する。加圧ポンプ33は、加圧制御部34が出力する加圧駆動信号Kdを受けてカフ31を加圧する。
【0127】
このようにして、カフ31は脈拍数に応じた加圧速度で加圧され、カフ31の加圧中に圧力センサ32によってカフ31の圧力は刻々と血圧測定制御部37に出力される。カフ31が所定の圧力まで加圧され被測定者8の測定部位の血管が圧迫されると、被測定者8
の脈拍に応じた圧力振動がカフ圧に重畳する。血圧測定制御部37は、圧力センサ32によって出力される圧力信号Soからカフ圧に重畳した脈拍による圧力振動を脈波振幅として検出する。
【0128】
血圧測定制御部37は、圧力センサ32の圧力信号Soに含まれる脈波振幅から、オシロメトリック方式の血圧値算出方法に基づいて最高血圧値や最低血圧値、脈拍数などを算出する。
【0129】
血圧測定制御部37は、最高血圧値や最低血圧値が求まると加圧制御部34を制御して加圧ポンプ33の動作を停止する。
【0130】
血圧測定制御部37は、排気制御信号Hcを排気制御部36に出力する。排気制御部36は、排気制御信号Hcに基づき排気バルブ35を制御する排気駆動信号Hdを排気バルブ35に出力する。
【0131】
排気バルブ35は、排気駆動信号Hdに基づき排気弁を全開にしてカフ31の空気を急速排気する。
【0132】
血圧測定制御部37は、カフの空気を排気すると共に算出された最高血圧値や最低血圧値、脈拍数などを血圧情報Kjとして報知手段4の表示部41に出力する。
【0133】
血圧測定中の適正位置の監視について説明する。
【0134】
血圧測定中に電子血圧計1の高さが、心臓の高さから変わってしまうことがある。適性位置で血圧測定を開始しても、血圧測定の途中で腕が下がるなどして適正位置から外れてしまうと、測定した血圧値は信用度のおけるものではなくなる。このように腕が適正位置から外れるなどの状態を被測定者が意図せずに起こしてしまったとき、被測定者自身では正しい血圧を測定したつもりでも、実際には正しくない血圧測定を行ってしまう。
【0135】
そのような状況を回避するため、電子血圧計1は、その位置が適正位置になり血圧測定を開始したあとも、マイクロ波センシングを継続し、適正位置であるか否かを監視することができる。
【0136】
第2の移動状態が終了して血圧測定が開始された後も、脈波データPoのピークを監視し続け、適正位置検出信号Msを出力する。
【0137】
適正位置検出信号Msが変化したときに、報知手段4を用いて報知する。例えば、「適正位置からずれました」などと報知する。また、適正位置検出信号Msのレベルが、大きく変化したとき、血圧測定を中断する。例えば、適正位置であるときのレベル3から、適正位置から大幅にずれているときのレベル1に変化したときには、電子血圧計1が心臓位置からずれてしまったとして、電子血圧計1は、報知手段4にて「血圧測定を中止します」と報知して、血圧測定を中断する。
【0138】
ところで、被測定者の都合で適正位置による血圧測定ではないが、とにかく血圧値を知りたいという場合もある。そのときは、操作部の測定開始スイッチなどを操作して、強制的に血圧測定を開始することもできる。
【0139】
[動作フローの説明:図6]
次に、主に図6を用いて、電子血圧計1による血圧測定の動作フローを詳述する。図6は、電子血圧計1を手首に装着し、血圧測定が終了するまでの動作を説明するフローチャ
ートである。以下、動作ステップはS1、S2、・・、Snのように略記する。
【0140】
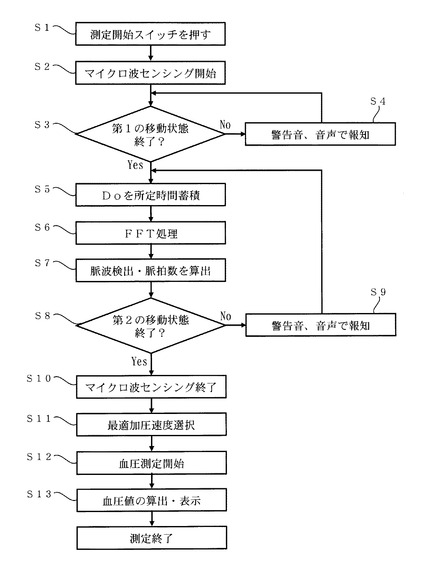
まず、被測定者8は電子血圧計1を手首に装着し操作部の測定開始スイッチを押す(S1)。
【0141】
すると、図3に示す適正位置検出手段2によって、マイクロ波センシング動作が開始される(S2)。
【0142】
被測定者8は、電子血圧計1を装着した手首を胸部前面まで移動させる(第1の移動状態)。その間、信号飽和検出部23によって、デジタル信号Doの振幅が所定の振幅範囲Drを超える回数を計測する。腕の大きな移動が終了するとデジタル信号Doは所定の振幅範囲Drに収まり、第1の移動状態が終了する。第1の移動状態が終了すると信号飽和検出部23が第1の移動状態終了信号Dsを出力する(S3、Yes)。
【0143】
このとき図3および図6には図示しないが、血圧測定制御部3は、信号飽和検出部23の出力する第1の移動状態終了信号Dsを入力して、報知手段4の報知部42を制御することによって音や光あるいは音声で「血圧計は適正な位置にあります」など、第1の移動状態が終了したことを報知してもよい。
【0144】
第1の移動状態が終了していない場合は、血圧測定制御部3は、信号飽和検出部23の計測状態に基づいて被測定者8が手首を胸に近づけ方が不足していたり近づけ方が適切でなく、第1の移動状態が終了していないと判断される場合(S3、No)は、報知手段4の報知部42を制御することによって「血圧計の位置が適切ではありません」、又は「もう一度血圧計を胸に近づけて下さい」等の音声報知を行う(S4)。
【0145】
電子血圧計1を胸に近づけるように音声報知をした後、S3に戻り第1の移動状態の検出を行う。第1の移動状態の終了を検出するまでS3とS4の処理を繰り返す。
【0146】
第1の移動状態が終了すると、図3に示す第2の移動検出手段24のFFT処理部242は、第2の時間情報T2に基づきデジタル信号Doを所定時間蓄積する(S5)。
【0147】
FFT処理部242は、所定時間蓄積したデジタル信号DoをFFT処理し、基本波Bfを算出する(S6)。
【0148】
図3に示す第2の移動検出手段24の脈波検出部243は、基本波Bfより脈波データPoを出力する。
【0149】
脈拍数算出部244は、脈波データPoから脈拍数を算出する(S7)。
【0150】
血圧判定測定部245は、所定の周波数範囲に入る脈波データPoの検出をもって、胸部前面にて電子血圧計1と心臓とが同一の高さとなったと判定する。これが第2の移動状態の終了検出である(S8、Yes)。
【0151】
なお、所定の周波数範囲は、実験などにより予め求めておけばよく、例えば脈波の周波数スペクトル分布を0.5Hzから3.0Hzの範囲とすることができる。
【0152】
血圧判定測定部245が、脈波データPoを検出できず胸部前面にて電子血圧計1と心臓とが同一の高さと判定できないとき(S8、No)は、適正位置検出信号Msに基づいて血圧測定制御部37は警告音や警告表示を行う。例えば、「血圧計をさらに上に上げてください」や「血圧計をさらに下げてください」などと報知手段4を用いて報知する(S
9)。
【0153】
また、胸部前面にて電子血圧計1と心臓との距離が離れすぎていても脈波データPoは検出されないことがある。そのときは、「さらに血圧計を胸に近づけてください」等の報知がなされる。
【0154】
電子血圧計1が心臓と同じ高さになるように電子血圧計1を動かすよう報知をした後、S5に戻り第2の移動状態の終了検出するまでS5からS9の処理を繰り返す。
【0155】
図2に示す第2の移動検出手段24の血圧測定判定部245は、適正位置検出信号Msを、例えば3段階のレベルで出力する。報知手段4は、そのレベルを報知部42を用いて、心臓高さの適性度に応じ異なるブザー音やマークで報知する。そして、第2の移動状態が終了するとマイクロ波センシングを終了する(S10)。
【0156】
脈拍数算出部244で算出した脈拍数信号Mkに基づいて血圧測定制御部37の加圧条件設定部371は加圧速度を選択する(S11)。
【0157】
血圧測定制御部37が、加圧条件設定部371で設定された加圧速度となるように加圧制御部33を制御して加圧ポンプ33を駆動することでカフを加圧して、血圧測定手段3による血圧測定が開始される(S12)。
【0158】
血圧測定手段3は、上述したとおり血圧測定制御部37によって加圧制御部34を制御して加圧している間に圧力センサ32が出力する圧力信号Soの圧力振動波形から、最高血圧値や最低血圧値、脈拍数など血圧情報Kjを算出して表示部41に表示するする(S13)。
【0159】
なお、第2の移動状態が終了(S8)した後、S10のマイクロ波センシングを終了せず血圧測定中も適正位置検出信号Msを監視し続けてもよい。この場合、血圧測定中の適正位置検出信号Msの監視結果を報知手段4を用いて報知する。例えば、電子血圧計1が適正位置からずれてしまったときは、その旨を報知して血圧測定を中断して終了する。
【0160】
血圧測定が終了すると、血圧測定制御部37の血圧情報メモリ372は、最高血圧値や最低血圧値および脈拍数などの血圧情報と適正位置検出信号Msを記憶する(S9)。
【0161】
被測定者は、操作部の測定開始スイッチを押して測定を終了する(S10)。このとき血圧情報メモリ372は、最高血圧値や最低血圧値および脈拍数などの血圧情報と適正位置検出信号Msを記憶するようにしてもよい。
【0162】
[実施形態の効果説明]
マイクロ波ドップラセンサにより正しく適正位置に腕部を誘導する間に検出した脈拍数に基づいてカフの加圧速度を設定して血圧測定を行うので、被測定者に適した最適な加圧速度で加圧して測定することでき測定時間を短縮することができる。
【0163】
以上説明した実施形態では、本発明の電子血圧計を手首に装着する例を示したが、もちろん上腕部などに装着してもよい。また、カフ31と血圧計本体11とが一体となる構成を例にして説明したが、カフとマイクロ波ドップラセンサとが一体に構成されていれば、その他の構成は別体としてもよい。
【0164】
また、以上説明した実施形態では、本発明の電子血圧計が脈拍数を用いて加圧速度を設定する例を説明したが、脈拍数の代わりに脈拍間隔を用いてもよい。脈拍間隔(sec)
は、脈波データPo(Hz)から1/Poの値を求めることで算出できるし、脈拍数(bpm)の逆数を60倍することでも算出できる。
【0165】
また、上述の実施例では、測定部位を適正位置に誘導するためにマイクロ波ドップラセンサを用いる例を説明したが、本発明はこれに限られるものではない。
【0166】
例えば、マイクロホンなどの心音センサを用いて測定部位の適正位置を検出するようにしてもよい。その場合、心音センサの検出する心音の強さで適正位置を検出して誘導するとともに検出された心音からその脈拍数を求めて適正な加圧速度を選択するようにすればよい。
【0167】
さらに、加速度センサを用いて測定部位の適正位置を検出するようにしてもよい。この場合、加速度センサで腕が水平に出ているか否かを検出して測定部位が適正位置にあるか否かを検出するとともに、腕を水平に出すと脈拍に同期して微動するので、加速度センサで微動周期を求めて脈拍数に換算することで、脈拍数(脈波間隔)に応じて適正な加圧速度を選択するようにすればよい。
【0168】
これらの場合においてもカフとそれぞれのセンサを含む血圧計本体とが一体でもよいし、カフとそれぞれのセンサとが一体に構成され、その他の構成は別体としてもよい。
【符号の説明】
【0169】
1 電子血圧計
2 適正位置検出手段
21 マイクロ波ドップラセンサ
211 マイクロ波発信器
212 マイクロ波受信器
213 マイクロ波ドップラ復調器
22 AD変換器
23 信号飽和検出部
24、26 第2の移動検出手段
25 第1移動検出手段
242 FFT処理部
243 脈波検出部
244 脈拍数算出部
245 血圧測定判定部
246 呼吸波検出部
3 血圧測定手段
31 カフ
32 圧力センサ
33 加圧ポンプ
34 加圧制御部
35 排気バルブ
36 排気制御部
37 血圧測定制御部
372 血圧情報メモリ
38 血圧計測定部
4 報知手段
41 表示部
411 最高血圧表示部
412 最低血圧表示部
413 脈拍数表示部
414 呼吸数表示部
415 測定条件表示部
415a 脈拍条件マーク表示部
415b 呼吸条件マーク表示部
416 時刻表示部
42 報知部
6 計時部
8 被測定者
8a 左腕
8b 胸部前面
81 心臓
Me マイクロ波
Mt 反射波
Eme 送信マイクロ波信号
Emt 受信マイクロ波信号
Eo 電気信号
Do デジタル信号
Ds 第1の移動状態終了信号
Dr 所定の振幅範囲
Dx 第1の飽和閾値
Dm 第2の飽和閾値
Df1,Df2 所定の周波数範囲
Bf 基本波
Lf 第1の周波数閾値
Hf 第2の周波数閾値
Lfp 第3の周波数閾値
Hfp 第4の周波数閾値
Ms 適正位置検出信号
Mk 脈拍数信号
Po 脈波データ
P1,P2,P3 心臓の拍動成分
Rc 呼吸波データ
Rch 最大値
Rcl 最小値
R1,R2 呼吸による成分
So 圧力信号
Kc 加圧制御信号
Hc 排気制御信号
Kd 加圧駆動信号
Hd 排気駆動信号
T1 第1の時間情報
T2 第2の時間情報
T3 第3の時間情報
【技術分野】
【0001】
本発明は、被測定部位に装着したカフを加圧しているときに検出される脈波から血圧測定を行う加圧時測定方式の電子血圧計に関する。
【背景技術】
【0002】
現在、電子血圧計には、様々な測定方式がある。その一つにオシロメトリック方式という測定方式がある。
【0003】
オシロメトリック方式の血圧計は、腕部や脚部に巻回されたカフを一定速度で加圧又は減圧した際にカフ圧に重畳する脈波の出現、ピーク、消失の関係から血圧値を算出するものである。
【0004】
一定速度で減圧しているときに測定を行う減圧時測定方式では、カフを一旦脈波が消失する圧力まで加圧して、その後に減圧させたときに脈波を検出して血圧値を算出している。
【0005】
一方、一定速度で加圧しているときに測定を行う加圧時測定方式では、カフを加圧していく過程で検出される脈波に基づいて血圧値を算出している。
【0006】
ところで、正確に血圧値を算出するには、最低7拍程度の脈波情報が必要で、通常、個人差を考慮した上で、7拍程度の脈波が得られる速度で圧力変化を制御する。
【0007】
減圧時測定方式は、最初の加圧過程で粗く対象者の脈拍情報を検知しておき、被験者の脈拍間隔時間に応じて、「脈拍の遅い人は遅く減圧」、「脈拍の速い人は早く減圧」させる事により平均的な測定時間を短縮させる事が出来る。
【0008】
一方、加圧時測定方式は、最初から測定状態として加圧する。つまり、加圧時測定方式は、対象者の脈拍の事前情報が無い状態から加圧測定に入る。このため、被験者の脈拍間隔の個人差に合わせた加圧を行うことができず、脈拍の遅い被験者でも脈波が7拍得られる遅い速度で加圧する必要があった。
【0009】
そこで、加圧時測定方式の血圧計において、加圧を開始してから加圧の初期段階で被験者の脈拍間隔を判定して、途中から最適な加圧速度に切り換えることによって最適な加圧速度で測定可能とすることを可能とする技術が提案されている(特許文献1)。
【先行技術文献】
【特許文献】
【0010】
【特許文献1】特開平9−299340号公報
【発明の概要】
【発明が解決しようとする課題】
【0011】
特許文献1に記載された血圧計においては、脈拍間隔を認識するためには、最低3拍の脈波情報が必要となり、実際に血圧決定に必要な7拍分の脈波のうち約半分に相当する期間を脈波間隔の認識のために予め脈拍の遅い人でも脈波が7拍得られる遅い速度で加圧せざるおえないため、測定時間を十分短縮することができないという問題があった。
【0012】
本発明の目的は、上記の問題を解決し、加圧開始から最適な加圧速度でカフを加圧して
測定可能な電子血圧計を提供することにある。
【課題を解決するための手段】
【0013】
上記課題を解決するため、本発明の加圧時測定式血圧計は、生体の一部に装着されるカフを加圧し、加圧中のカフ圧に重畳した脈波信号に基づいて血圧を算出する電子血圧計において、カフの加圧前に検出した被測定者の生体情報に基づいてカフの加圧速度を設定する加圧速度設定手段を有することを特徴とする。
【0014】
また、本発明の加圧時測定式血圧計は、被測定者の生体情報に基づいてカフを装着した測定部位の位置を検出する位置検出手段を有し、加圧速度設定手段は、位置検出手段が測定部位の位置を検出している間に検出した生体情報に基づいてカフの加圧速度を設定することを特徴とする。
【0015】
また、本発明の加圧時測定式血圧計は、血圧測定の制御を行う血圧測定制御手段を有し、位置検出手段が、測定部位が適正位置へ移動したと判定すると、血圧測定制御手段は、加圧速度設定手段によって設定された加圧速度でカフを加圧して血圧測定を開始することを特徴とする。
【0016】
また、本発明の加圧時測定式血圧計の位置検出手段は、マイクロ波発生器とマイクロ波受信器とを備え、マイクロ波発生器より被測定者にマイクロ波を照射し、マイクロ波受信器により被測定者の生体の動きによってドップラシフトした反射波を検出して、該反射波により測定部位の位置を検出することを特徴とする
また、本発明の加圧時測定式血圧計の位置検出手段は、カフを装着した測定部位が胸部前面へ移動する第1の移動状態を検出する第1の移動検出手段と、カフを装着した測定部位の胸部前面での適正位置へ移動する第2の移動状態を検出する第2の移動検出手段と、をさらに備え、第1の移動検出手段により第1の移動状態が終了したと判定された後に第2の検出手段により第2の移動状態を検出することを特徴とする。
【0017】
また、本発明の加圧時測定式血圧計の加圧速度設定手段は、第2の移動状態を検出しているときに位置検出手段が検出する脈波を用いてカフの加速度を設定することを特徴とする。
【0018】
また、本発明の加圧時測定式血圧計は、第2の移動検出手段により第2の移動状態の検出が終了したことによって、位置検出手段が、測定部位の適正位置への移動が完了したと判定することを特徴とする。
【発明の効果】
【0019】
本発明の電子血圧計によれば、加圧開始から最適な加圧速度で加圧して測定することで測定時間を短縮することができる。
【図面の簡単な説明】
【0020】
【図1】本発明の電子血圧計の実施形態の外観を示す図ある。
【図2】本発明の電子血圧計の実施形態の構成を示す機能ブロック図である。
【図3】第1の移動状態及び第2の移動状態を説明する図である。
【図4】本発明の電子血圧計の実施形態の動作を説明する波形図である。
【図5】本発明の電子血圧計の実施形態の加圧速度の設定例を示す図である。
【図6】本発明の電子血圧計の実施形態の動作を示すフローチャートである。
【発明を実施するための形態】
【0021】
本発明の電子血圧計は、カフを加圧する前に得られる被測定者の生体情報によってカフ
の加圧速度を設定する。
【0022】
電子血圧計は、カフを加圧する前に測定部位(カフを装着した腕部)の位置を検出し、測定部位が血圧測定の適正位置にあるか否かを検出しているときに得られる被測定者の脈拍数(脈拍間隔)によって加圧速度を設定する。
【0023】
電子血圧計は、測定部位が適正位置にあると判定されると設定された加圧速度でカフを加圧して血圧測定を行う。なお、血圧測定の適正位置とは、身体の血圧測定部位と心臓とが同一の高さとなる位置を言う。
【0024】
本発明の電子血圧計は、マイクロ波ドップラセンサを用いて、被測定者の身体にマイクロ波を照射し、その反射波を受信することで血圧測定における測定部位の適正位置を検出する。また、マイクロ波の反射波から、被測定者の脈拍数や脈拍間隔などの生体情報も測定することができる。これらの生体情報により、血圧測定に適した加圧速度を算出して血圧測定を行う。
【0025】
電子血圧計は、血圧測定開始時に電子血圧計のカフを装着した腕部(例えば、手首)が身体に対してどの位置(腕を下げているのか、持ち上げているのかなど)にあるか分からない。その状態から、カフを装着した腕部を適正位置に移動させるためにマイクロ波ドップラセンサから得られる信号を処理してカフを装着した腕部の位置を検出する。
【0026】
まず、第1の移動検出手段は、得られた信号が所定の値を超える飽和振幅の回数で大きな腕部の移動状態を検出する。
【0027】
次に、第2の移動状態検出手段は、得られた信号をフーリエ変換した周波数成分の分布から基本波(ピーク値)が所定の周波数閾値範囲に入っているか否か(脈拍や呼吸が正常に検出されたか否か)でカフを装着した腕部が適正位置にあるか否かを検出する。このとき、基本波から脈拍数も測定する。
【0028】
そして、カフを装着した腕部が適正位置にあると判定されると、第2の移動状態を検出しているときに測定された脈拍数によって設定した加圧速度でカフを加圧して血圧測定を行う。
【0029】
本発明の電子血圧計は、カフを加圧する前のカフを装着した腕部が適正位置にあるか否かを検出しているときに得られる脈拍の情報に基づいてカフの加圧速度を設定して血圧測定を行うので、被測定者に適した最適な加圧速度で加圧して測定することでき測定時間を短縮することができる。
【0030】
以下、本発明の電子血圧計を図面を用いて詳述する。
【0031】
なお、以下の説明にあっては、電子血圧計は、カフおよびマイクロ波ドップラセンサと血圧測定部とが一体となる構成を例にして説明するが、電子血圧計は、血圧を測定する部位に装着するカフとマイクロ波ドップラセンサとが一体に構成されていれば、血圧測定制御部や報知手段などを搭載した血圧測定部とカフとは、一体であっても別体であってもよい。
【実施例1】
【0032】
以下、図1から図6を用いて本発明の電子血圧計の実施形態を詳述する。なお、説明においては、電子血圧計を主に左手首に装着した場合を例に説明を行う。
【0033】
図1は、本発明の電子血圧計の外観を示す図である。
【0034】
電子血圧計1は、血圧計本体11とカフ31で構成されている。血圧計本体11は、血圧測定に必要な構成を内部に備えている。また、血圧計本体11は、後に詳述する主表示部411、副表示部412、報知部42および操作部5などを有している。
【0035】
[電子血圧計の構成説明:図2]
図2は、電子血圧計の構成を説明する機能ブロック図である。
【0036】
図2において、電子血圧計1は、血圧測定部位が心臓の高さに対して適正か否かを検出する適正位置検出手段2と、血圧を測定する血圧測定手段3と、測定結果を視覚的に表示する表示部41及びアラーム音や音声といった音響手段で報知する報知部42を備える報知手段4と、操作部5と、日時などの時刻情報を生成する計時部6とを有している。
【0037】
[適正位置検出手段2の説明]
まず、適正位置検出手段2の構成を説明する。
【0038】
図2に示すように、適正位置検出手段2は、マイクロ波ドップラセンサ21、第1の移動検出手段25および第2の移動検出手段24とで構成されている。
【0039】
マイクロ波ドップラセンサ21は、一般的なマイクロ波ドップラセンサを用いることができる。マイクロ波ドップラセンサには、その出力信号がアナログ信号のものとデジタル信号のものとがありどちらを用いてもよい。マイクロ波ドップラセンサ21にはアナログ信号をデジタル信号に変換するAD変換器を搭載していない例で説明をする。
【0040】
マイクロ波ドップラセンサ21は、例えば、約2.5GHzのマイクロ波を発射するマイクロ波発信器(図示しない)と、照射したマイクロ波を受信するマイクロ波受信器(図示しない)と、マイクロ波ドップラ復調器(図示しない)とで構成されている。
【0041】
マイクロ波発信器から発射されたマイクロ波Meは、一部が被測定者8の中に入り心臓81で反射して反射波Mtとなって、再び被測定者8を経由してマイクロ波受信器で受信される。
【0042】
マイクロ波発信器は、発信したマイクロ波Meに相当する電気信号である送信マイクロ波信号Emeをマイクロ波ドップラ復調器に出力する。マイクロ波受信器は、受信した反射波Mtに相当する電気信号である受信マイクロ波信号Emtをマイクロ波ドップラ復調器に出力する。
【0043】
マイクロ波ドップラ復調器は、送信マイクロ波信号Emeと受信マイクロ波信号Emtとから、2つの信号の位相差信号である電気信号を、電気信号Eoとして出力する。
【0044】
マイクロ波受信器が受信した反射波Mtには、心臓の動きに対応したドップラシフトによってマイクロ波発信器から発射されたマイクロ波Meに対して位相差が生じる。ドップラシフトによるマイクロ波の位相差を送信マイクロ波信号Emeと受信マイクロ波信号Emtとからマイクロ波ドップラ復調器により電気信号Eoに変換することで心臓の動きを検出することが可能となる。
【0045】
第1の移動検出手段25は、AD変換器22と、信号飽和検出部23とで構成されている。
【0046】
AD変換器22は、計時部6からの第1の時間情報T1に基づきマイクロ波ドップラセンサ21の出力である電気信号Eoをデジタル信号Doに変換する変換器である。
【0047】
信号飽和検出部23は、デジタル信号Doが飽和状態になったことを検出し第1の移動状態が終了したことを告げる第1の移動状態終了信号Dsを出力する。
【0048】
第2の移動検出手段24は、FFT(Fast Fourier Transform:高速フーリエ変換)処理部242と、脈波検出部243と、血圧測定判定部245と、脈拍数算出部244と、で構成されている。
【0049】
FFT処理部242は、計時部6からの第2の時間情報T2に基づきデジタル信号Doを所定時間蓄積してFFT処理により周波数スペクトラム情報である基本波Bfを出力する。
【0050】
脈波検出部243は、基本波Bfを入力して脈波データPoを出力する。血圧測定判部245は、脈波データPoを入力して適正位置検出信号Msを出力する。
【0051】
脈拍数算出部244は、脈波データPoから脈拍数を算出し、脈拍数信号Mkを出力する。脈拍数(bpm)の算出は、脈拍の周波数である脈波データPo(Hz)を1/60倍することで算出する。
【0052】
計時部6は、水晶振動子などを用いて所定の周波数のクロック信号を出力する源振クロック部、クロック信号を分周して所定の分周信号を生成する分周回路部、分周信号から時刻情報を生成する時刻生成部などで構成することができる。これらの構成は公知の時計回路などで広く知られているものであるから、詳細な説明は省略する。
【0053】
計時部6からは、第1の時間情報T1、第2の時間情報T2、第3の時間情報T3を出力する。第1の時間情報T1は、AD変換器22のサンプリング時間を決めるための時刻情報を有しており、例えば、パルス周期を10msecとした信号である。第2の時間情報T2は、FFT処理部にデジタル信号Doを蓄積する所定時間を得るための時刻情報を有しており、例えば、周期を10〜30secとしたパルス信号である。第3の時間情報T3は、血圧測定を行なったときの日付や時間情報を有する時刻情報である。
【0054】
[血圧測定手段3の構成説明]
次に、血圧測定手段3の構成を説明する。
【0055】
血圧測定手段3は、カフ31と、圧力センサ32と、加圧ポンプ33と、加圧制御部34と、排気バルブ35と、排気制御部36と、血圧測定制御部37と、で構成されている。
【0056】
カフ31は、手首の橈骨動脈を加圧して血流を阻止するための帯状の部材である。
【0057】
圧力センサ32は、カフ31の圧力を電気信号に変換して圧力信号Soとして出力する。加圧ポンプ33は、カフ31を加圧するためのポンプである。加圧制御部34は、血圧測定制御部37からの加圧制御信号Kcに基づき加圧駆動信号Kdを出力し加圧ポンプ33を駆動する。
【0058】
排気バルブ35は、カフ31の圧力を所定の割合で排気するためのバルブである。排気制御部36は、血圧測定制御部37からの排気制御信号Hcに基づき排気駆動信号Hdを出力し排気バルブ35を制御する。
【0059】
血圧測定制御部37は、電子血圧計1の動作を全般的に制御管理する。具体的には、血圧測定制御部37は、圧力信号Soと、適正位置検出信号Msとから血圧情報Kjおよび適正報知信号Tpを出力する。血圧情報Kjは、最高血圧値、最低血圧値、脈拍数、血圧測定時の時刻情報および適正位置検出信号Msなどを含む情報である。適正報知信号Tpは、適正位置検出信号Msからなる適正位置情報である。
【0060】
血圧測定制御部37の血圧情報メモリ372は、その血圧情報Kjを記憶するためのメモリ手段である。
【0061】
なお、この血圧測定制御部37の構成は特に限定されないが、ワンチップマイクロコンピュータなどで構成すると、小型で低消費電力化ができるので便利である。
【0062】
[報知手段4の構成説明:図1、2]
次に、図1および図2を用いて報知手段4の構成を説明する。
【0063】
報知手段4は、電子血圧計1が測定した血圧値を表示したり、血圧測定部位が心臓の高さと同一となる適正位置にあるか否かを報知したりするものである。報知手段4は、表示部41と報知部42とから構成されている。表示部41は、血圧測定制御部37が出力する最高血圧値、最低血圧値、脈拍数および血圧測定時の時刻情報などの血圧情報Kjを表示する主表示部411と適正位置のレベルを表示する副表示部412とから構成することができる。報知部42は、音声や音や振動で被測定者に電子血圧計1の血圧測定部位が測定の適正位置にあるか否か報知する。
【0064】
副表示部412は、適正位置検出信号Msのレベルに応じたマークや光で報知する。例えば、適正位置検出信号Msのレベルを3段階とすると、適正位置であるときをレベル3として「○」を表示し、やや適正位置からずれているときをレベル2として「△」を表示し、適正位置から大幅にずれているときをレベル1として「×」を表示するような、複数のマークによる表示を行なうようにしてもよい。
【0065】
3段階のレベルは、例えば次のように決めることができる。
【0066】
適正位置であるレベル3は、電子血圧計1の血圧測定部位が、心臓右心房から±1cm未満の範囲に入っているとき。やや適正位置からずれているレベル2は、電子血圧計1の血圧測定部位が、心臓右心房から±1cm以上から±5cm未満の範囲に入っているとき。適正位置から大幅にずれているレベル1は、電子血圧計1の血圧測定部位が、心臓右心房から±5cm以上の範囲にあるとき。
【0067】
それぞれのレベルは、デジタル信号Doや脈波データPoの振幅にそれぞれのレベルに応じた複数の閾値を設け、閾値を超えているか否かで判定すればよい。
【0068】
また、LED光の色でレベルを表示するようにしてもよい。例えば、レベル3を「青」、レベル2を「黄」、レベル1を「赤」などとしてもよい。もちろん、マークや光を組み合わせて表示してもかまわない。
【0069】
図1に示す例では、主表示部41は、測定結果の例として最高血圧値120mmHg、最低血圧値80mmHg、脈拍数60bpmおよび測定時刻AM7:30を表示している。
【0070】
また、図1に示す例は、マークを用いて適正位置を報知する場合である。図1の副表示
部412は、適正位置検出信号Msがレベル3の場合であり「〇」マークを表示している。
【0071】
報知部42は、ダイナミックスピーカやピエゾ音響素子などで構成することができる。アラーム音や音声で報知することができる。音声は、例えば「血圧計の位置が適正位置です」又は「血圧計の位置が適切位置ではありません」などとすることができる。
【0072】
このように、光やマーク、又は音声で適正位置に導くように案内することができるので、被測定者は電子血圧計を正しく適正位置にもって行くことができる。
【0073】
血圧測定時は、リラックスした姿勢で望むのがよいとされているから、電子血圧計を胸部前面に位置しているときに、このように音声やアラーム音でその状況を報知できれば、首を下に向けるなどする必要も無く、リラックスした姿勢を維持できて便利である。
【0074】
[腕の移動状態の説明:図3]
次に、図3を用いて適正位置検出手段2の第1の移動検出手段25と第2の移動検出手段24とが検出する腕の移動状態を説明する。
【0075】
図3(a)から図3(e)は、電子血圧計1を被測定者8の左腕8aの手首に装着し、血圧測定を開始するまでの腕の移動状態を模式的に表した図である。図3(f)は、被測定者を頭頂部より見下ろした状態を示す図であり、被測定者の胸部前面を説明する図である。
【0076】
図3(a)は、電子血圧計1を左手首に装着し、右手で操作部5のスイッチを操作して血圧測定を開始したときの状態である。
【0077】
図3(b)と図3(c)は、腕(電子血圧計)の第1の移動状態を示す図である。被測定者は、図3(b)に示す矢印のように徐々に左腕を移動させ、図3(c)に示す矢印のように、電子血圧計1が被測定者8の胸部前面8bに移動するようにする。
【0078】
ここで、胸部前面8bは、図3(f)に示すように、身体の前面という意味を含む概念である。心臓は、左胸か左胸よりやや右寄りにある場合が多いから、心臓の鼓動を検出するときは、左胸前が適している。しかし、マイクロ波ドップラセンサ21を用いているために、正確に左胸前でなくとも心臓の鼓動を検出することができる。例えば、左胸斜め横側(左わき腹の上、脇の下のやや下位置)、胸中央、被測定者によっては右胸前であっても検出することができる。したがって、発明者は胸部前面という範囲を図3(f)に示す胸部前面8bのエリアとして定義する。
【0079】
図3(d)は、移動状態が第2の移動状態を示す図である。被測定者は、図3(c)電子血圧計1が胸部前面8bの位置から、図3(d)に示す矢印のように心臓81と同じ高さになる適正位置までさらに腕を移動させる。
【0080】
図3(e)は、電子血圧計1と心臓81との高さが同一となり、適正位置になった状態を示している。
【0081】
電子血圧計1が第1の移動状態にあるときは、電子血圧計1自体が大きく動いている状態である。また、第2の移動状態にあるときは、電子血圧計1は小さく動いている状態である。
【0082】
詳しくは後述するが、第1の移動状態であるときは、マイクロ波ドップラセンサ21か
ら出力される電気信号Eoの振幅を用いて第1の移動状態を検出し、第2の移動状態にあるときは、電気信号Eoに含まれる信号の周波数成分を用いて脈波を検出し、脈波により適正位置を見つけるのである。
【0083】
以下の説明において、マイクロ波ドップラセンサ21を用い、電気信号Eoから生体の動きを検出する手法を「マイクロ波センシング」と略記する。
【0084】
[実施形態の動作説明:図2〜4]
次に、図2〜4を用いて電子血圧計の動作を説明する。
【0085】
まず、適正位置検出手段2の動作説明を行なう。
【0086】
図2において、被測定者8が電子血圧計1を手首(図示せず)に装着し操作部の測定開始スイッチを押すと、マイクロ波ドップラセンサ21は、約2.5GHzのマイクロ波Meを発信し、被測定者8で反射され、反射波Mtとしてマイクロ波受信器212で受信する。
【0087】
マイクロ波ドップラセンサ21は、マイクロ波Meに基づく送信マイクロ波信号Emeと、反射波Mtに基づく受信マイクロ波信号Emtとによる電気信号Eoを第1の移動検出手段25のAD変換器22に出力する。
【0088】
AD変換器22は、電気信号EoをAD変換して時系列のデジタル信号Doとして信号飽和検出部23及び第2の移動検出手段24に出力する。
【0089】
信号飽和検出部23は、デジタル信号Doを入力して、デジタル信号Doのデータ変化量が、所定の振幅範囲を予め定められた回数を超えると、第1の移動状態終了信号Dsを第2の移動検出手段24に出力する。
【0090】
このとき、図示はしないが血圧測定制御部37は、信号飽和検出部23の出力する第1の移動状態終了信号Dsを入力して、報知手段4を制御して音や光あるいは音声で第1の移動状態が終了したことを報知してもよい。
【0091】
第2の移動検出手段24は、デジタル信号Doを入力として適正位置検出信号Msを血圧測定手段3に出力する。
【0092】
第2の移動検出手段24のFFT処理部242は、第2の時間情報T2に基づきデジタル信号Doを所定時間蓄積しFFT処理を行なう。このFFT処理は、入力信号の高速フーリエ変換処理を行なうものである。すなわち、蓄積したデジタル信号Doをフーリエ変換し、個々の信号成分に分解した後、各成分を周波数スペクトラム上に表す処理を行い、基本波Bfとして脈波検出部243に出力する。
【0093】
脈波検出部243は、基本波Bfを入力して、基本波Bfの中の脈拍に係わる周波数帯域の成分を抽出し、脈波データPoとして脈拍数算出部244及び血圧測定判定部245に出力する。
【0094】
脈拍数算出部244は、脈波データPoから脈拍数を算出し、脈拍数信号Mkとして血圧測定手段3に出力する。
【0095】
第1の移動検出手段25の信号飽和検出部23及び第2の移動検出手段24の動作を図3及び図4を用いてさらに詳述する。
【0096】
図4は、適正位置検出手段2の第1の移動検出手段25及び第2の移動検出手段24の動作を説明するために模式的に示す波形図である。図4(a)は、横軸に時間Tを、縦軸にデジタル信号Doの振幅を示しており、デジタル信号Do、つまりマイクロ波ドップラセンサ21から出力される信号の時間的変化を表したものである。
【0097】
図4(a)の区間Aは、手首に電子血圧計1を装着し、操作部の測定開始スイッチを押した後、電子血圧計1が被測定者8の胸に近づくときの時間領域を表している。これは、図3(a)から図3(c)に示した第1の移動状態を示している。
【0098】
図4(a)に示すDxは第1の飽和閾値、Dmは第2の飽和閾値を示している。この第1の飽和閾値Dxと第2の飽和閾値Dmとの間が、所定の振幅範囲Drとなっている。また、Dsは第1の移動状態終了信号である。
【0099】
第1の飽和閾値Dx及び第2の飽和閾値Dmは、予め決められた値を使うことができる。2つの閾値で所定の振幅範囲Drを設定する。図4(a)に示す例では、第2の飽和閾値Dmはゼロとしており、いわゆるゼロ飽和閾値となっており、所定の振幅値を閾値とした第1の飽和閾値Dx(いわゆるプラス飽和閾値)との間が所定の振幅範囲Drとなっている。
【0100】
区間A(第1の移動状態)のとき、被測定者8の生体表面でのマイクロ波の反射に、腕の移動が加わるのでドップラシフトが増大し、デジタル信号Doが急激に大きくなる。第1の移動検出手段25の信号飽和検出部23は、デジタル信号Doが所定の振幅範囲Drを超えた回数を計測する。そして、信号飽和検出部23は、所定の振幅範囲Drを超えた回数が所定回数を超えたときに第1の移動状態の最中であることを検出する。所定回数は、予め実験などによりその数を選ぶなどして設定しておくとよい。例えば、所定回数を10回とすると、デジタル信号Doが所定の振幅範囲Drを10回超えると第1の移動状態の最中であることが検出される。
【0101】
図4(a)の区間A´は、図4(a)の区間Aの終わりの部分であって、第1の移動状態が終了したときの時間領域である。
【0102】
図3(a)から図3(c)及び図3(f)を用いて説明したように、腕を大きく動かして被測定者8の胸部前面8bに腕を移動させる第1の移動状態は、電子血圧計1が図3(c)に示す胸部前面8bの心臓に近い位置に来たときに終了する。すなわち、区間A´でデジタル信号Doが所定の振幅範囲Drの範囲内に収まるようになると、腕を大きく動かしていない、つまり第1の移動状態は終了したと判断する。このときのデジタル信号Doを、第1の移動状態終了信号Dsとしている。
【0103】
第2の移動検出手段24は、第1の移動検出手段25から出力されたデジタル信号Doを入力して信号処理をするが、第1の移動状態終了信号Dsが入力されて初めてその処理を開始する。第1の移動状態が終了していないうちに信号処理を開始しないためである。
【0104】
図4(a)の区間Bは、手首を心臓近くに留置した状態の時間領域を示している。これは、図3(d)から図3(e)に示した第2の移動状態を示している。
【0105】
区間Bでは、腕の大きな移動動作が無くなったものの、適正位置を探すために小さく腕を動かしているため、所定の振幅範囲Drを超えないデジタル信号Doが検出される。この区間Bの波形には、心臓の拍動による波形も含まれている。
【0106】
図4(b)は、図4(a)に示す区間Bにおけるデジタル信号Doの一部を拡大して示したものである。この時間領域を区間Dとする。このデジタル信号Doには、検出された被測定者8の心臓の拍動成分が含まれており、例えば、P1,P2,P3である。
【0107】
図4(c)は、FFT処理部242によりデジタル信号Doを高速フーリエ変換処理した波形を模式的に示す図である。X軸が周波数、Y軸を各周波数成分の信号の強さとした周波数スペクトラム分布図である。
【0108】
FFT処理部242は、図4(a)の区間Bにおいて、第2の時間情報T2に基づきデジタル信号Doを所定時間蓄積して高速フーリエ変換を行い、図4(c)に示すような周波数成分の基本波Bfを得る。
【0109】
第2の移動検出手段24の脈波検出部243は、基本波Bfから所定の周波数範囲から脈波データPoを算出する。
【0110】
図4(c)に示すLfは第1の周波数閾値、Hfは第2の周波数閾値である。第1の周波数閾値Lfと第2の周波数閾値Hfとの間が、所定の周波数範囲Df1となっている。この周波数範囲は、脈波を捉える範囲でなければならない。発明者が実験した結果によれば、例えば、第1の周波数閾値Lfを0.5Hz近辺、第2の周波数閾値Hfを3.0Hz近辺とすることで脈波を捉えることができる。
【0111】
脈波検出部243は、基本波Bfのうち、所定の周波数範囲Df1に含まれる周波数スペクトラム分布を脈波データPoとして出力する。
【0112】
血圧測定判定部245は、入力した脈波データPoを分析する。脈波データPoは、周波数成分のスペクトラム分布であるから、その周波数成分やパワー強度、あるいは平均、分散、標準偏差などの統計処理を行なうことができる。血圧測定判定部245は、脈波データPoが正常に検出されていれば、電子血圧計が血圧測定に適正位置にあると判定して第2の移動状態は終了する。このとき、図3(e)に示すように電子血圧計1は心臓81と同一の高さとなる適正位置になっている。そして血圧測定判定部245は、処理結果が血圧測定に適正であることを示す適正位置検出信号Msを血圧測定手段3に出力する。
【0113】
図4(c)に示すように、所定の周波数範囲Df1内の周波数スペクトラム分布が脈波データPoであるから、第1の周波数閾値Lfと第2の周波数閾値Hfとが適する閾値であれば、脈波として適する波形が必ず含まれている。統計処理により、例えば、脈波データPoに含まれる各波形のピークを算出し、そのピークの出現傾向などで脈波を判定してもよい。例えば、2回続けて波形の強さが上がるものを脈波であるとすることができる。
【0114】
そして、血圧測定判定部245は、統計処理した結果で、適正位置かどうかを判定して適正位置検出信号Msを出力する。
【0115】
適正位置検出信号Msは、位置の適正度を表す1,2,3の3段階の数値などを用いることができる。例えば、ピークの強さで適正度を3段階に分けることができる。ピークが最も強いところが適正位置であり、それよりも弱いところが適正位置からややずれている、などと適正度を決めることができる。
【0116】
もちろん、図4(c)の縦軸の各周波数成分の信号の強さに対して1つ又は複数の閾値を設け、その閾値を超えたもので適正度を分けることができる。この場合、その閾値は、事前に設定しておいてもよいし、脈波データPoを統計処理してその出現傾向から閾値を算出して用いるようにしてもよい。
【0117】
すでに説明したように、第2の移動検出手段24の動作は、第1の移動検出手段25の信号飽和検出部23の出力である第1の移動状態終了信号Dsによって制御され、第1の移動状態終了信号Dsが入力されていないと第2の移動検出手段24は動作を行わない。こうすることによって、第1の移動状態検出の後に第2の移動状態検出がなされることが担保される。
【0118】
[血圧測定手段3の動作説明:図2]
次に、図2を用いて血圧測定手段3の動作を説明する。
【0119】
図2において、適正位置検出手段2の血圧測定判定部245は、被測定者8の手首に装着された電子血圧計1の心臓高さに対する位置の適性度を、適正位置検出信号Msとして血圧測定手段3の血圧測定制御部37に出力する。
【0120】
血圧測定制御部37は、報知手段4の表示部41に適正位置検出信号Msを出力する。表示部41の測定条件表示部415の脈拍条件表示部415aには、適正位置検出信号Msの例えば3段階のレベルに応じて「○」,「△」,「×」などのマークを表示する。
【0121】
血圧測定制御部37は、また、報知手段4の報知部42に適正位置検出信号Msを出力する。報知部42は、適正位置検出信号Msによって「血圧計の位置が適正位置です」又は「血圧計の位置が適切位置ではありません」などの音声による報知を行う。
【0122】
報知部42は、ブザー音で適正位置検出信号Msの3段階のレベルに応じて異なる音色で報知することや、振動モータを用いて異なる振動で適正位置検出信号Msの3段階のレベルを報知するなどしてもよい。
【0123】
そして、血圧測定制御部37は、適正位置検出信号Msに基づき以下に述べるように、血圧測定の動作を制御する。
【0124】
電子血圧計1が適正位置であるときをレベル3とすると、血圧測定制御部37は、レベル3の適正位置検出信号Msが入力されると、脈拍数算出部244の脈拍数信号Mkに基づいて加圧条件設定部371により加圧速度の条件を設定する。
【0125】
加圧条件設定部371が設定する加圧速度は、図5に示されるように脈拍数が40bpm以下の場合を4.0mmHg/sec、脈拍数が40より大きく80bpm以下の場合を8.0mmHg/sec、脈拍数が80より大きく120bpm以下の場合を12.0mmHg/sec、そして脈拍数が120bpmより大きい場合を16.0mmHg/secの4段階に分けることができる。なお、図5に示す脈拍数による加圧速度の条件は一例であり、加圧中に7拍以上の脈波を確実に検出することができれば上述の例に限られるものではなく様々な条件に設定することができる。
【0126】
加圧条件設定部371に加圧条件が設定されると血圧測定制御部37は、設定された加圧速度で制御されるように加圧制御部34に加圧制御信号Kcを出力する。加圧制御部34は、加圧制御信号Kcに基づいて加圧ポンプ33を駆動する加圧駆動信号Kdを加圧ポンプ33に出力する。加圧ポンプ33は、加圧制御部34が出力する加圧駆動信号Kdを受けてカフ31を加圧する。
【0127】
このようにして、カフ31は脈拍数に応じた加圧速度で加圧され、カフ31の加圧中に圧力センサ32によってカフ31の圧力は刻々と血圧測定制御部37に出力される。カフ31が所定の圧力まで加圧され被測定者8の測定部位の血管が圧迫されると、被測定者8
の脈拍に応じた圧力振動がカフ圧に重畳する。血圧測定制御部37は、圧力センサ32によって出力される圧力信号Soからカフ圧に重畳した脈拍による圧力振動を脈波振幅として検出する。
【0128】
血圧測定制御部37は、圧力センサ32の圧力信号Soに含まれる脈波振幅から、オシロメトリック方式の血圧値算出方法に基づいて最高血圧値や最低血圧値、脈拍数などを算出する。
【0129】
血圧測定制御部37は、最高血圧値や最低血圧値が求まると加圧制御部34を制御して加圧ポンプ33の動作を停止する。
【0130】
血圧測定制御部37は、排気制御信号Hcを排気制御部36に出力する。排気制御部36は、排気制御信号Hcに基づき排気バルブ35を制御する排気駆動信号Hdを排気バルブ35に出力する。
【0131】
排気バルブ35は、排気駆動信号Hdに基づき排気弁を全開にしてカフ31の空気を急速排気する。
【0132】
血圧測定制御部37は、カフの空気を排気すると共に算出された最高血圧値や最低血圧値、脈拍数などを血圧情報Kjとして報知手段4の表示部41に出力する。
【0133】
血圧測定中の適正位置の監視について説明する。
【0134】
血圧測定中に電子血圧計1の高さが、心臓の高さから変わってしまうことがある。適性位置で血圧測定を開始しても、血圧測定の途中で腕が下がるなどして適正位置から外れてしまうと、測定した血圧値は信用度のおけるものではなくなる。このように腕が適正位置から外れるなどの状態を被測定者が意図せずに起こしてしまったとき、被測定者自身では正しい血圧を測定したつもりでも、実際には正しくない血圧測定を行ってしまう。
【0135】
そのような状況を回避するため、電子血圧計1は、その位置が適正位置になり血圧測定を開始したあとも、マイクロ波センシングを継続し、適正位置であるか否かを監視することができる。
【0136】
第2の移動状態が終了して血圧測定が開始された後も、脈波データPoのピークを監視し続け、適正位置検出信号Msを出力する。
【0137】
適正位置検出信号Msが変化したときに、報知手段4を用いて報知する。例えば、「適正位置からずれました」などと報知する。また、適正位置検出信号Msのレベルが、大きく変化したとき、血圧測定を中断する。例えば、適正位置であるときのレベル3から、適正位置から大幅にずれているときのレベル1に変化したときには、電子血圧計1が心臓位置からずれてしまったとして、電子血圧計1は、報知手段4にて「血圧測定を中止します」と報知して、血圧測定を中断する。
【0138】
ところで、被測定者の都合で適正位置による血圧測定ではないが、とにかく血圧値を知りたいという場合もある。そのときは、操作部の測定開始スイッチなどを操作して、強制的に血圧測定を開始することもできる。
【0139】
[動作フローの説明:図6]
次に、主に図6を用いて、電子血圧計1による血圧測定の動作フローを詳述する。図6は、電子血圧計1を手首に装着し、血圧測定が終了するまでの動作を説明するフローチャ
ートである。以下、動作ステップはS1、S2、・・、Snのように略記する。
【0140】
まず、被測定者8は電子血圧計1を手首に装着し操作部の測定開始スイッチを押す(S1)。
【0141】
すると、図3に示す適正位置検出手段2によって、マイクロ波センシング動作が開始される(S2)。
【0142】
被測定者8は、電子血圧計1を装着した手首を胸部前面まで移動させる(第1の移動状態)。その間、信号飽和検出部23によって、デジタル信号Doの振幅が所定の振幅範囲Drを超える回数を計測する。腕の大きな移動が終了するとデジタル信号Doは所定の振幅範囲Drに収まり、第1の移動状態が終了する。第1の移動状態が終了すると信号飽和検出部23が第1の移動状態終了信号Dsを出力する(S3、Yes)。
【0143】
このとき図3および図6には図示しないが、血圧測定制御部3は、信号飽和検出部23の出力する第1の移動状態終了信号Dsを入力して、報知手段4の報知部42を制御することによって音や光あるいは音声で「血圧計は適正な位置にあります」など、第1の移動状態が終了したことを報知してもよい。
【0144】
第1の移動状態が終了していない場合は、血圧測定制御部3は、信号飽和検出部23の計測状態に基づいて被測定者8が手首を胸に近づけ方が不足していたり近づけ方が適切でなく、第1の移動状態が終了していないと判断される場合(S3、No)は、報知手段4の報知部42を制御することによって「血圧計の位置が適切ではありません」、又は「もう一度血圧計を胸に近づけて下さい」等の音声報知を行う(S4)。
【0145】
電子血圧計1を胸に近づけるように音声報知をした後、S3に戻り第1の移動状態の検出を行う。第1の移動状態の終了を検出するまでS3とS4の処理を繰り返す。
【0146】
第1の移動状態が終了すると、図3に示す第2の移動検出手段24のFFT処理部242は、第2の時間情報T2に基づきデジタル信号Doを所定時間蓄積する(S5)。
【0147】
FFT処理部242は、所定時間蓄積したデジタル信号DoをFFT処理し、基本波Bfを算出する(S6)。
【0148】
図3に示す第2の移動検出手段24の脈波検出部243は、基本波Bfより脈波データPoを出力する。
【0149】
脈拍数算出部244は、脈波データPoから脈拍数を算出する(S7)。
【0150】
血圧判定測定部245は、所定の周波数範囲に入る脈波データPoの検出をもって、胸部前面にて電子血圧計1と心臓とが同一の高さとなったと判定する。これが第2の移動状態の終了検出である(S8、Yes)。
【0151】
なお、所定の周波数範囲は、実験などにより予め求めておけばよく、例えば脈波の周波数スペクトル分布を0.5Hzから3.0Hzの範囲とすることができる。
【0152】
血圧判定測定部245が、脈波データPoを検出できず胸部前面にて電子血圧計1と心臓とが同一の高さと判定できないとき(S8、No)は、適正位置検出信号Msに基づいて血圧測定制御部37は警告音や警告表示を行う。例えば、「血圧計をさらに上に上げてください」や「血圧計をさらに下げてください」などと報知手段4を用いて報知する(S
9)。
【0153】
また、胸部前面にて電子血圧計1と心臓との距離が離れすぎていても脈波データPoは検出されないことがある。そのときは、「さらに血圧計を胸に近づけてください」等の報知がなされる。
【0154】
電子血圧計1が心臓と同じ高さになるように電子血圧計1を動かすよう報知をした後、S5に戻り第2の移動状態の終了検出するまでS5からS9の処理を繰り返す。
【0155】
図2に示す第2の移動検出手段24の血圧測定判定部245は、適正位置検出信号Msを、例えば3段階のレベルで出力する。報知手段4は、そのレベルを報知部42を用いて、心臓高さの適性度に応じ異なるブザー音やマークで報知する。そして、第2の移動状態が終了するとマイクロ波センシングを終了する(S10)。
【0156】
脈拍数算出部244で算出した脈拍数信号Mkに基づいて血圧測定制御部37の加圧条件設定部371は加圧速度を選択する(S11)。
【0157】
血圧測定制御部37が、加圧条件設定部371で設定された加圧速度となるように加圧制御部33を制御して加圧ポンプ33を駆動することでカフを加圧して、血圧測定手段3による血圧測定が開始される(S12)。
【0158】
血圧測定手段3は、上述したとおり血圧測定制御部37によって加圧制御部34を制御して加圧している間に圧力センサ32が出力する圧力信号Soの圧力振動波形から、最高血圧値や最低血圧値、脈拍数など血圧情報Kjを算出して表示部41に表示するする(S13)。
【0159】
なお、第2の移動状態が終了(S8)した後、S10のマイクロ波センシングを終了せず血圧測定中も適正位置検出信号Msを監視し続けてもよい。この場合、血圧測定中の適正位置検出信号Msの監視結果を報知手段4を用いて報知する。例えば、電子血圧計1が適正位置からずれてしまったときは、その旨を報知して血圧測定を中断して終了する。
【0160】
血圧測定が終了すると、血圧測定制御部37の血圧情報メモリ372は、最高血圧値や最低血圧値および脈拍数などの血圧情報と適正位置検出信号Msを記憶する(S9)。
【0161】
被測定者は、操作部の測定開始スイッチを押して測定を終了する(S10)。このとき血圧情報メモリ372は、最高血圧値や最低血圧値および脈拍数などの血圧情報と適正位置検出信号Msを記憶するようにしてもよい。
【0162】
[実施形態の効果説明]
マイクロ波ドップラセンサにより正しく適正位置に腕部を誘導する間に検出した脈拍数に基づいてカフの加圧速度を設定して血圧測定を行うので、被測定者に適した最適な加圧速度で加圧して測定することでき測定時間を短縮することができる。
【0163】
以上説明した実施形態では、本発明の電子血圧計を手首に装着する例を示したが、もちろん上腕部などに装着してもよい。また、カフ31と血圧計本体11とが一体となる構成を例にして説明したが、カフとマイクロ波ドップラセンサとが一体に構成されていれば、その他の構成は別体としてもよい。
【0164】
また、以上説明した実施形態では、本発明の電子血圧計が脈拍数を用いて加圧速度を設定する例を説明したが、脈拍数の代わりに脈拍間隔を用いてもよい。脈拍間隔(sec)
は、脈波データPo(Hz)から1/Poの値を求めることで算出できるし、脈拍数(bpm)の逆数を60倍することでも算出できる。
【0165】
また、上述の実施例では、測定部位を適正位置に誘導するためにマイクロ波ドップラセンサを用いる例を説明したが、本発明はこれに限られるものではない。
【0166】
例えば、マイクロホンなどの心音センサを用いて測定部位の適正位置を検出するようにしてもよい。その場合、心音センサの検出する心音の強さで適正位置を検出して誘導するとともに検出された心音からその脈拍数を求めて適正な加圧速度を選択するようにすればよい。
【0167】
さらに、加速度センサを用いて測定部位の適正位置を検出するようにしてもよい。この場合、加速度センサで腕が水平に出ているか否かを検出して測定部位が適正位置にあるか否かを検出するとともに、腕を水平に出すと脈拍に同期して微動するので、加速度センサで微動周期を求めて脈拍数に換算することで、脈拍数(脈波間隔)に応じて適正な加圧速度を選択するようにすればよい。
【0168】
これらの場合においてもカフとそれぞれのセンサを含む血圧計本体とが一体でもよいし、カフとそれぞれのセンサとが一体に構成され、その他の構成は別体としてもよい。
【符号の説明】
【0169】
1 電子血圧計
2 適正位置検出手段
21 マイクロ波ドップラセンサ
211 マイクロ波発信器
212 マイクロ波受信器
213 マイクロ波ドップラ復調器
22 AD変換器
23 信号飽和検出部
24、26 第2の移動検出手段
25 第1移動検出手段
242 FFT処理部
243 脈波検出部
244 脈拍数算出部
245 血圧測定判定部
246 呼吸波検出部
3 血圧測定手段
31 カフ
32 圧力センサ
33 加圧ポンプ
34 加圧制御部
35 排気バルブ
36 排気制御部
37 血圧測定制御部
372 血圧情報メモリ
38 血圧計測定部
4 報知手段
41 表示部
411 最高血圧表示部
412 最低血圧表示部
413 脈拍数表示部
414 呼吸数表示部
415 測定条件表示部
415a 脈拍条件マーク表示部
415b 呼吸条件マーク表示部
416 時刻表示部
42 報知部
6 計時部
8 被測定者
8a 左腕
8b 胸部前面
81 心臓
Me マイクロ波
Mt 反射波
Eme 送信マイクロ波信号
Emt 受信マイクロ波信号
Eo 電気信号
Do デジタル信号
Ds 第1の移動状態終了信号
Dr 所定の振幅範囲
Dx 第1の飽和閾値
Dm 第2の飽和閾値
Df1,Df2 所定の周波数範囲
Bf 基本波
Lf 第1の周波数閾値
Hf 第2の周波数閾値
Lfp 第3の周波数閾値
Hfp 第4の周波数閾値
Ms 適正位置検出信号
Mk 脈拍数信号
Po 脈波データ
P1,P2,P3 心臓の拍動成分
Rc 呼吸波データ
Rch 最大値
Rcl 最小値
R1,R2 呼吸による成分
So 圧力信号
Kc 加圧制御信号
Hc 排気制御信号
Kd 加圧駆動信号
Hd 排気駆動信号
T1 第1の時間情報
T2 第2の時間情報
T3 第3の時間情報
【特許請求の範囲】
【請求項1】
生体の一部に装着されるカフを加圧し、加圧中のカフ圧に重畳した脈波信号に基づいて血圧を算出する電子血圧計において、
カフの加圧前に検出した被測定者の生体情報に基づいてカフの加圧速度を設定する加圧条件設定手段を有することを特徴とする電子血圧計。
【請求項2】
被測定者の生体情報に基づいてカフを装着した測定部位の位置を検出する位置検出手段を有し、
前記加圧条件設定手段は、前記位置検出手段が測定部位の位置を検出している間に検出した生体情報に基づいてカフの加圧速度を設定することを特徴とする請求項1に記載の電子血圧計。
【請求項3】
血圧測定の制御を行う血圧測定制御手段を有し、
前記位置検出手段が、前記測定部位が適正位置へ移動したと判定すると、前記血圧測定制御手段は、前記加圧条件設定手段によって設定された加圧速度でカフを加圧して血圧測定を開始することを特徴とする請求項2に記載の電子血圧計。
【請求項4】
前記位置検出手段は、マイクロ波発生器とマイクロ波受信器とを備え、前記マイクロ波発生器より前記被測定者にマイクロ波を照射し、前記マイクロ波受信器により前記被測定者の生体の動きによってドップラシフトした反射波を検出して、該反射波により測定部位の位置を検出することを特徴とする請求項2または3に記載の電子血圧計。
【請求項5】
前記位置検出手段は、
前記カフを装着した測定部位が胸部前面へ移動する第1の移動状態を検出する第1の移動検出手段と、
前記カフを装着した測定部位の胸部前面での適正位置へ移動する第2の移動状態を検出する第2の移動検出手段と、
をさらに備え、
前記第1の移動検出手段により前記第1の移動状態が終了したと判定された後に前記第2の検出手段により第2の移動状態を検出することを特徴とする請求項2から4のいずれか1項に記載の電子血圧計。
【請求項6】
前記加圧条件設定手段は、前記第2の移動状態を検出しているときに前記位置検出手段が検出する脈波を用いてカフの加速度を設定することを特徴とする請求項5に記載の電子血圧計。
【請求項7】
前記第2の移動検出手段により第2の移動状態の検出が終了したことによって、位置検出手段は、測定部位の適正位置への移動が完了したと判定することを特徴とする請求項 5または6に記載の電子血圧計。
【請求項8】
前記位置検出手段は、マイクロホンでありマイクロホンの検出する心音の強さによって測定部位の位置を検出することを特徴とする請求項2または3に記載の電子血圧計。
【請求項9】
前記位置検出手段は、加速度センサであり加速度センサで腕が水平であるか否かを検出して測定部位の位置を検出することを特徴とする請求項2または3に記載の電子血圧計。
【請求項1】
生体の一部に装着されるカフを加圧し、加圧中のカフ圧に重畳した脈波信号に基づいて血圧を算出する電子血圧計において、
カフの加圧前に検出した被測定者の生体情報に基づいてカフの加圧速度を設定する加圧条件設定手段を有することを特徴とする電子血圧計。
【請求項2】
被測定者の生体情報に基づいてカフを装着した測定部位の位置を検出する位置検出手段を有し、
前記加圧条件設定手段は、前記位置検出手段が測定部位の位置を検出している間に検出した生体情報に基づいてカフの加圧速度を設定することを特徴とする請求項1に記載の電子血圧計。
【請求項3】
血圧測定の制御を行う血圧測定制御手段を有し、
前記位置検出手段が、前記測定部位が適正位置へ移動したと判定すると、前記血圧測定制御手段は、前記加圧条件設定手段によって設定された加圧速度でカフを加圧して血圧測定を開始することを特徴とする請求項2に記載の電子血圧計。
【請求項4】
前記位置検出手段は、マイクロ波発生器とマイクロ波受信器とを備え、前記マイクロ波発生器より前記被測定者にマイクロ波を照射し、前記マイクロ波受信器により前記被測定者の生体の動きによってドップラシフトした反射波を検出して、該反射波により測定部位の位置を検出することを特徴とする請求項2または3に記載の電子血圧計。
【請求項5】
前記位置検出手段は、
前記カフを装着した測定部位が胸部前面へ移動する第1の移動状態を検出する第1の移動検出手段と、
前記カフを装着した測定部位の胸部前面での適正位置へ移動する第2の移動状態を検出する第2の移動検出手段と、
をさらに備え、
前記第1の移動検出手段により前記第1の移動状態が終了したと判定された後に前記第2の検出手段により第2の移動状態を検出することを特徴とする請求項2から4のいずれか1項に記載の電子血圧計。
【請求項6】
前記加圧条件設定手段は、前記第2の移動状態を検出しているときに前記位置検出手段が検出する脈波を用いてカフの加速度を設定することを特徴とする請求項5に記載の電子血圧計。
【請求項7】
前記第2の移動検出手段により第2の移動状態の検出が終了したことによって、位置検出手段は、測定部位の適正位置への移動が完了したと判定することを特徴とする請求項 5または6に記載の電子血圧計。
【請求項8】
前記位置検出手段は、マイクロホンでありマイクロホンの検出する心音の強さによって測定部位の位置を検出することを特徴とする請求項2または3に記載の電子血圧計。
【請求項9】
前記位置検出手段は、加速度センサであり加速度センサで腕が水平であるか否かを検出して測定部位の位置を検出することを特徴とする請求項2または3に記載の電子血圧計。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2013−42840(P2013−42840A)
【公開日】平成25年3月4日(2013.3.4)
【国際特許分類】
【出願番号】特願2011−181312(P2011−181312)
【出願日】平成23年8月23日(2011.8.23)
【出願人】(000001960)シチズンホールディングス株式会社 (1,939)
【出願人】(507351883)シチズン・システムズ株式会社 (82)
【Fターム(参考)】
【公開日】平成25年3月4日(2013.3.4)
【国際特許分類】
【出願日】平成23年8月23日(2011.8.23)
【出願人】(000001960)シチズンホールディングス株式会社 (1,939)
【出願人】(507351883)シチズン・システムズ株式会社 (82)
【Fターム(参考)】
[ Back to top ]