
電子血圧計
【課題】カフ圧の加圧速度の変化による誤差を排除した脈波から血圧を算出する。
【解決手段】電子血圧計100は、被測定者の測定部位の周囲に巻付けられるカフと、カフ内に流体を供給するためのポンプを制御することにより、カフ内の圧力を調整するための調整部と、血圧測定中に、加圧速度目標に従ってカフ内の圧力が等速加圧されるように調整部を制御する制御部と、カフ内の圧力を表わすカフ圧を検出するための圧力検出部と、カフ圧に重畳する脈波を検出するための脈波検出部118と、検出されるカフ圧と、脈波振幅とに基づいて血圧を算出するための血圧算出部と、加圧速度目標を可変に変更する目標変更部114と、を備える。血圧算出部は、加圧速度目標の変更による脈波振幅の誤差を補正するように脈波振幅を変更し、カフ圧と変更後の脈波振幅とに基づいて血圧を算出する。
【解決手段】電子血圧計100は、被測定者の測定部位の周囲に巻付けられるカフと、カフ内に流体を供給するためのポンプを制御することにより、カフ内の圧力を調整するための調整部と、血圧測定中に、加圧速度目標に従ってカフ内の圧力が等速加圧されるように調整部を制御する制御部と、カフ内の圧力を表わすカフ圧を検出するための圧力検出部と、カフ圧に重畳する脈波を検出するための脈波検出部118と、検出されるカフ圧と、脈波振幅とに基づいて血圧を算出するための血圧算出部と、加圧速度目標を可変に変更する目標変更部114と、を備える。血圧算出部は、加圧速度目標の変更による脈波振幅の誤差を補正するように脈波振幅を変更し、カフ圧と変更後の脈波振幅とに基づいて血圧を算出する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は電子血圧計に関し、特に、測定部位から検出される脈波を用いて血圧を測定する電子血圧計に関する。
【背景技術】
【0002】
血圧は循環器系疾患を解析する指標の一つであり、血圧に基づいてリスク解析を行うことは、例えば脳卒中や心不全や心筋梗塞などの心血管系の疾患の予防に有効である。従来は通院時や健康診断時などの医療機関で測定される血圧(随時血圧)により診断が行われていた。しかしながら近年の研究により、家庭で測定する血圧(家庭血圧)が随時血圧より循環器系疾患の診断に有用であることが判明してきた。それに伴い、家庭で使用する血圧計が普及している。
【0003】
家庭向けの血圧計の多くがオシロメトリック法による血圧測定方法を採用している。オシロメトリック法による血圧測定は、カフを上腕などの測定部位に巻付け、カフの内圧(カフ圧)を収縮期血圧より所定圧(例えば30mmHg)だけ高く加圧し、その後、徐々にまたは段階的にカフ圧を減圧していく。この減圧過程における動脈の容積変化をカフ圧に重畳した圧変化(脈波振幅)として検出し、この脈波振幅の変化より収縮期血圧および拡張期血圧を決定する方法である。オシロメトリック法では、カフ圧の加圧過程において発生する脈波振幅を検出して血圧を測定することも可能である。
【0004】
これらの血圧測定において正確に脈波振幅を検出するためには、ポンプまたは弁によりカフ圧を一定速度で、加圧または減圧する必要がある。そこで、特許文献1(特開2006−129920号公報)では、等速加圧制御、または等速減圧制御では平均速度と目標速度との差に基づいて、平均速度が目標速度となるようにポンプまたは弁の駆動電圧をフィードバック制御する。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2006−129920号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
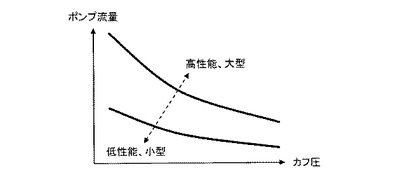
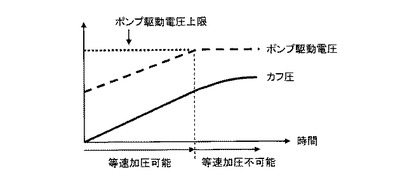
図16は、従来の血圧計のポンプの出力流量と、カフ圧の関係を模式的に示す図である。図17には、従来のカフ圧の等速加圧とポンプ駆動電圧の関係が模式的に示される。家庭用の血圧計においては、ユーザビリティ向上の観点から小型化や低コスト化が求められており、それに応えるためにポンプは小型である。図16に示されるように、ポンプのサイズとポンプからの空気などの流体の出力流量はトレードオフの関係にあるため、大型のポンプに比較し小型のポンプは所望の加圧速度を達成できない場合がある。
【0007】
また、小型のポンプの場合には、加圧速度を目標速度に一致させるようにフィードバック制御される駆動電圧がポンプ駆動の上限電圧を超えてしまった場合、それ以上に速度を増加させることができず、カフ圧を等速で加圧することができない(図17参照)。この場合は脈波1拍内での圧力変動要因として、脈波の容積変化成分のみならず、加圧速度変化成分も含まれるため、脈波振幅の検出精度が低下する。そのため血圧算出精度も低下してしまう。
【0008】
それゆえに、本発明の目的は、カフ圧の加圧速度の変化による誤差を排除した脈波から血圧を算出することのできる電子血圧計を提供することである。
【課題を解決するための手段】
【0009】
この発明のある局面に従う電子血圧計は、被測定者の測定部位の周囲に巻付けられるカフと、カフ内に流体を供給するためのポンプを制御することにより、前記カフ内の圧力を調整するための調整部と、血圧測定中に、加圧速度目標に従ってカフ内の圧力が等速加圧されるように調整部を制御する制御部と、カフ内の圧力を表わすカフ圧を検出するための圧力検出部と、カフ圧に重畳する脈波を検出するための脈波検出部と、検出されるカフ圧と、脈波振幅とに基づいて血圧を算出するための血圧算出部と、加圧速度目標を可変に変更する目標変更部と、を備える。血圧算出部は、加圧速度目標の変更による脈波振幅の誤差を補正するように脈波振幅を変更し、カフ圧と変更後の脈波振幅とに基づいて血圧を算出する。
【発明の効果】
【0010】
本発明によれば、カフ圧の加圧速度の変化による誤差を排除した脈波から血圧を算出することができる。
【図面の簡単な説明】
【0011】
【図1】実施の形態1に係る電子血圧計のハードウェア構成を表わすブロック図である。
【図2】実施の形態1に係る電子血圧計の機能構成を示すブロック図である。
【図3】加圧速度が脈波振幅に与える影響と、脈波の振幅補正について説明する図である。
【図4】加圧速度が脈波振幅に与える影響と、脈波の振幅補正について説明する図である。
【図5】カフコンプライアンス特性を示す図である。
【図6】実施の形態に係る補正係数を格納するテーブルを示す図である。
【図7】実施の形態による脈波振幅の補正を模式的に示す図である。
【図8】実施の形態に係る周囲長を推定するために参照されるテーブルを示す図である。
【図9】実施の形態によるカフ圧‐加圧時間特性(適切巻きの場合)のグラフである。
【図10】実施の形態1に係る血圧測定の処理フローチャートである。
【図11】実施の形態2による加圧過程で脈波が検出されるタイミングを説明する図である。
【図12】実施の形態2に係る電子血圧計の機能構成を示す機能ブロック図である。
【図13】実施の形態2に係る血圧測定の処理フローチャートである。
【図14】実施の形態3に係る電子血圧計の機能構成を示す機能ブロック図である。
【図15】実施の形態3に係る加圧速度目標を決定するためのテーブルを示す図である。
【図16】従来の血圧計のポンプの出力流量と、カフ圧の関係を模式的に示す図である。
【図17】従来のカフ圧の等速加圧とポンプ駆動電圧の関係を模式的に示す図である。
【発明を実施するための形態】
【0012】
以下、図面を参照しつつ、本発明の各実施の形態について説明する。以下の説明では、同一の部品には同一の符号を付してある。それらの名称および機能も同じである。したがって、それらについての詳細な説明は繰り返さない。
【0013】
(実施の形態1)
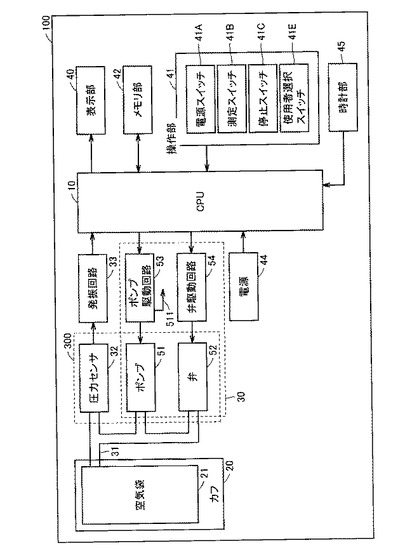
図1は、本実施の形態に係る電子血圧計100のハードウェア構成を表わすブロック図である。図1を参照して、電子血圧計100は血圧測定部位に装着されるカフ20およびエア系300を備える。カフ20は空気袋21を含む。空気袋21は、エアチューブ31を介して、エア系300に接続される。
【0014】
電子血圧計100は、さらに表示部40、操作部41および各部を集中的に制御し、各種演算処理を行なうためのCPU(Central Processing Unit)10、CPU10に所定の動作をさせるためのプログラムや各種データを記憶するためのメモリ部42、各部に電力を供給するための電源44、計時動作を行なうための時計部45を含む。メモリ部42は、測定された血圧を記憶するための不揮発性メモリ(例えばフラッシュメモリ)などを含む。
【0015】
操作部41は、電源をONまたはOFFするための操作を受付ける電源スイッチ41A、測定開始の操作を受付けるための測定スイッチ41B、測定停止の指示の操作を受付けるための停止スイッチ41C、およびユーザ(被測定者)を選択的に指定する操作を受付けるための使用者選択スイッチ41Eを有する。操作部41は、フラッシュメモリに格納された測定血圧などの情報を読出し表示部に表示させる操作を受付けるための図示のないスイッチも有する。
【0016】
本実施の形態では、電子血圧計100は複数の被測定者により共用されることから、使用者選択スイッチ41Eを備えるが、共用されない場合には使用者選択スイッチ41Eは省略されてよい。また、測定スイッチ41Bを、電源スイッチ41Aと兼用してもよい。その場合には、測定スイッチ41Bは省略することができる。
【0017】
エア系300は、空気袋21内の圧力(以下、カフ圧という)を検出するための圧力センサ32、カフ圧を加圧するために、空気袋21に空気を供給するためのポンプ51、および空気袋21の空気を排出しまたは封入するために開閉される弁52を含む。電子血圧計100は、エア系300に関連して、発振回路33、ポンプ駆動回路53、および弁駆動回路54を含む。ここでは、ポンプ51、弁52、ポンプ駆動回路53および弁駆動回路54は、カフ圧を調整するための調整部30に相当する。
【0018】
ポンプ51には、モータを駆動源として用いるポンプ、圧電素子を駆動源として用いた圧電マイクロポンプなどを適用することができる。
【0019】
圧力センサ32は、静電容量形の圧力センサであり、カフ圧により容量値が変化する。発振回路33は、圧力センサ32の容量値に応じた発振周波数の信号(以下、圧力信号という)をCPU10に出力する。CPU10は、発振回路33から得られる信号を圧力に変換することによってカフ圧を検知する。ポンプ駆動回路53は、CPU10から与えられる制御信号に基づいてポンプ51を制御する。弁駆動回路54はCPU10から与えられる制御信号に基づいて弁52の開閉を制御する。
【0020】
なお、カフ20に供給される流体は空気に限定されるものではなく、例えば液体やゲルであってもよい。あるいは、流体に限定されるものではなく、マイクロビーズなどの均一な微粒子であってもよい。
【0021】
(機能構成)
図2は、本実施の形態に係る電子血圧計100の機能構成を示す機能ブロック図である。機能構成は、CPU10が有する機能と、その周辺部を用いて示される。
【0022】
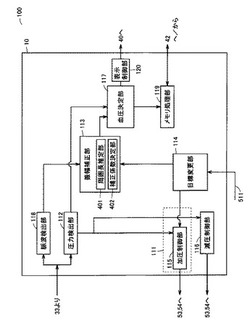
図2を参照して、CPU10は、発振回路33からの圧力信号を入力する脈波検出部118および圧力検出部112、脈波の振幅を補正するための振幅補正部113、血圧測定に際しての加圧速度の目標(以下、加圧速度目標という)を変更する目標変更部114、ポンプ駆動回路53と弁駆動回路54とに制御信号を出力する加圧制御部115および減圧制御部116、血圧値を決定する血圧決定部117、メモリ部42のフラッシュメモリのデータを読み書き(アクセス)するためのメモリ処理部119、および表示部40の表示を制御する表示制御部120を備える。加圧制御部115と減圧制御部116は、血圧測定中に調整部30を駆動制御することにより、加圧速度目標に従ってカフ圧を加圧させるための駆動制御部111に相当する。
【0023】
加圧制御部115および減圧制御部116は、カフ圧を調整するために、ポンプ駆動回路53および弁駆動回路54に制御信号を送信する。具体的には、カフ圧を加圧し、または減圧するための制御信号を出力する。本実施の形態では、カフ圧を加圧速度目標で加圧する過程において、血圧決定部117による血圧導出処理が行なわれる。脈波検出部118は、発振回路33からの圧力信号に重畳される動脈の容積変化を表す脈波信号を、フィルタ回路を用いて検出する。圧力検出部112は、カフ圧を検出するために、発振回路33からの圧力信号を圧力値に変換し、出力する。
【0024】
振幅補正部113は、周囲長推定部401および補正係数決定部402を含む。カフ20は、測定部位である例えば上腕(または手首)に巻き付けられる。周囲長推定部401は、カフ20が巻き付けられた測定部位の周囲(腕周)の長さを推定する。補正係数決定部402は、変更前後の加圧速度目標に基づき、脈波振幅を補正するための係数を決定する。
【0025】
血圧決定部117は、オシロメトリック式に従い血圧を決定する。具体的には、血圧測定時に圧力検出部112から入力するカフ圧と、脈波検出部118により検出された脈波、または振幅補正部113により振幅が補正された脈波とを用いて、脈波振幅の推移とカフ圧とに基づき血圧を決定する。例えば、脈波振幅の最大値に対応するカフ圧を平均血圧、また脈波振幅の最大値の50%に相当する高カフ圧側の脈波振幅に対応するカフ圧を収縮期血圧、また脈波振幅の最大値の70%に相当する低カフ圧側の脈波振幅に対応するカフ圧を拡張期血圧と決定する。また、脈拍数を、脈波信号を用いて公知の手順に従って算出する。したがって、ここでは、振幅補正部113および血圧決定部117は、血圧を算出するための血圧算出部に相当する。
【0026】
(ポンプ51のフィードバック制御)
オシロメトリック式に従って血圧測定する場合には、測定精度を得るために、カフ圧を一定の加圧速度目標で加圧しなければならない。つまり、目標変更部114は、血圧測定開始時に加圧制御部115に対して目標速度の初期値を与える。加圧制御部115は、圧力検出部112から定期的に入力するカフ圧に基づきカフ圧の変化速度を算出し、算出した変化速度と、目標変更部114から与えられる加圧速度目標と比較し、比較結果に基づく両者の差に基づく制御信号を生成し、ポンプ駆動回路53に出力する。このように、加圧速度が、加圧速度目標となるようにポンプ51はフィードバック制御される。
【0027】
ここでは、ポンプ51の吐出流量がポンプ駆動回路53から与えられる電圧に比例すると想定する。ポンプ駆動回路53は、制御信号に応じた電圧信号をポンプ51に出力する。ポンプ駆動回路53の出力段には図示のない電圧センサが設けられて、当該電圧センサによりポンプ51を駆動するための電圧が検出され、検出電圧を示す駆動電圧511が目標変更部114に出力される。
【0028】
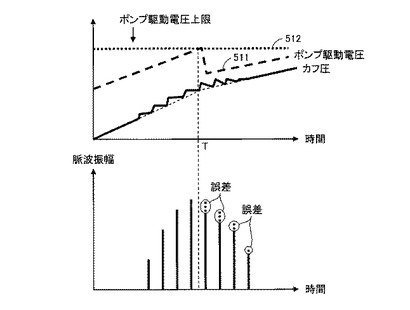
目標変更部114は、駆動電圧511と、ポンプ51に固有の駆動電圧上限512とを比較し、比較結果に基づき、(駆動電圧511>駆動電圧上限512)の条件が成立しポンプ51の出力は最大であり余裕がないと判定すると、加圧速度目標を下げるように変更する。そして、変更後の加圧速度目標を用いてフィードバック制御が行われる。これにより、ポンプ51の出力に余裕のある範囲で加圧速度を等速に制御できる。
【0029】
(脈波振幅の補正)
オシロメトリック式によれば、血圧の測定精度は、脈波振幅に依存するが、図16と図17で説明したように、脈波振幅には、脈波1拍内での血管の容積変化成分のみならずカフ圧の変化速度の成分も含むから、後者の成分に起因した脈波振幅の誤差を排除するように補正する必要がある。そこで、本実施の形態では、上述した加圧速度目標の変更に起因した誤差を排除することにより、脈波振幅を補正する。
【0030】
ここで、図3と4を参照して、加圧速度が脈波振幅に与える影響と、振幅補正について説明する。図3と4は発明者らの実験によるデータであり、減圧過程における減圧速度が脈波振幅に与える影響を示す。なお、図3と図4で示す原理は、加圧過程であっても同様に適用することができる。
【0031】
図3と図4では、減圧速度が速い場合と遅い場合とで、下段にはカフ圧の時間変化が示され、中段にはカフ容積の時間変化が示され、上段には測定部位の動脈血管の容積の時間変化が示される。これらは同一期間における変化を示す。図3と図4では、上段のように心臓の拍動による血管の容積変化ΔVが等しい場合であっても、中段に示すようにカフ容積波形の基線(点線で図示)に対するカフ容積変化の最大値は減圧速度によって相違する(すなわち、ΔVa<ΔVb)。この容積変化はカフ圧変化として表われるため、減圧速度が遅いほどカフ20の容積変化が大きくなり、下段のようにカフ圧変化も相違する(すなわち、ΔPa<ΔPb)。したがって、同様に血管容積が変化する場合であっても、減圧速度または加圧速度によって検出される脈波振幅は相違することになる。
【0032】
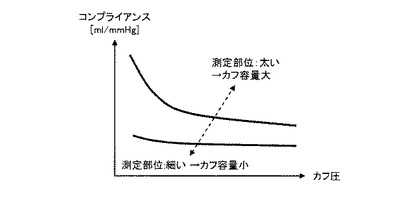
また、図5に示すカフコンプライアンス特性から、測定部位が太い(周囲長が長い)ほどカフコンプライアンスが大きくなるため、同様の血管容積変化であっても、測定部位の太さにより算出される脈波振幅が異なる、ことがわかる。なお、ここでいうカフコンプライアンスとはカフ圧を1mmHg変化させるのに必要な容積であり、単位は[ml/mmHg]である。
【0033】
したがって、カフ20の加圧速度を変化させた場合に検出される脈波振幅は、加圧速度の変化率と測定部位の周囲長に応じて決定する必要がある。ここで、加圧速度の変化率は、加圧速度目標の変化率に応じて決まる。ここで、変化率は、変更前の加圧速度目標と変更後の加圧速度目標との比を指す。
【0034】
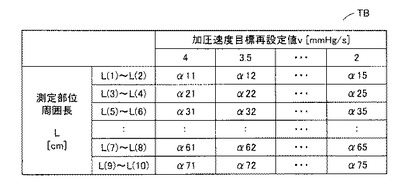
メモリ部42には、測定部位の周囲長Lと、変更後の加圧速度目標V(ここでは、変更前の加圧速度目標は一定としている)とに応じた補正係数αを格納した図6のテーブルTBが格納される。したがって、テーブルTBには、周囲長Lと加圧速度目標の変化率の各組に対応して補正係数αが格納されると言える。図6のデータは、実験等により取得される。
【0035】
血圧測定時には、加圧開始直後の圧力変化特性に基づき周囲長推定部401により測定部位の周囲長Lを推定する。そして、目標変更部114によって加圧速度目標が変更された後は、補正係数決定部402は周囲長Lと変更後の加圧速度目標Vとに基づきテーブルTBを検索して、対応する補正係数αを読出す。これにより、補正係数αが決定する。
【0036】
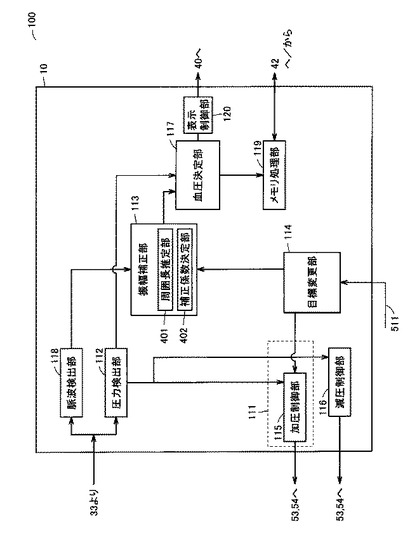
振幅補正部113は、脈波検出部118から入力する脈波信号(圧力信号)から1拍毎に脈波を抽出する。具体的には、圧力信号が示す圧力の現在値と先行値との差を算出し、差が基準を超えるか否かを判定し、判定結果に基づき信号の立上がり/立下り点を抽出する。これにより、脈波(1振幅)を抽出できる。
【0037】
振幅補正部113は、抽出された脈波の振幅値を、補正係数αを用いて補正する。つまり、検出した脈波振幅値AmpをAmp×αにより補正する。補正後の脈波を血圧決定部117に出力する。血圧決定部117は、振幅が補正された脈波を用いてオシロメトリック式に従って血圧を決定する。
【0038】
図7には、本実施の形態による脈波振幅補正が模式的に示される。図7によれば、上述したようにポンプ51の出力が余裕のある範囲で、等速加圧のための加圧速度目標が変更されると、変更に起因する脈波振幅の誤差は、上述の振幅補正により排除することができる。
【0039】
(周囲長推定)
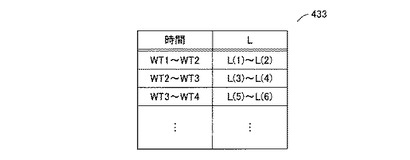
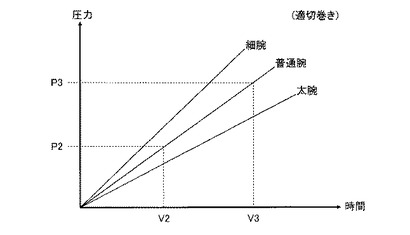
本実施の形態による測定部位の周囲長の推定について説明する。図8は、本実施の形態に係る測定部位周囲長Lを推定するために参照されるテーブル433の一例を示す図である。テーブル433には、カフ20の測定部位に対する巻付け状態が“適切巻き”の場合においてカフ圧を所定圧力だけ加圧するのに要する等速加圧の時間と、対応する周囲長Lが格納される。テーブル433のデータは、予め実験等により取得される。図9は、本実施の形態によるカフ圧‐加圧時間特性(適切巻きの場合)のグラフである。図8と図9のデータは、電子血圧計100を用いて多くの被験者からサンプリングしたデータに基づく値を指す。ここで、“適切巻き”とは、測定部位の周囲長に対して巻付けられたカフ20の内径(測定部位である腕の断面の径)による円周の長さにほぼ等しい状態を指す。本実施の形態では、適切巻きの状態において血圧測定がされると想定する。
【0040】
測定部位に巻付けたカフ20のカフ圧と、カフ20内へ供給する流体(本実施の形態では、空気)の容積変化に基づき、カフ圧が、圧力P2から圧力P3になるまでに必要な空気は、流体容積ΔV23であるとする(図9参照)。加圧過程でポンプ51が等速加圧(一定回転数)の下で流体容積ΔV23の空気を供給するのに要する加圧時間は、一定時間(ここでは、時刻V2〜時刻V3の時間V23)となる。しかしながら、時間V23は、測定部位の周囲長Lに依存して変化する。
【0041】
例えば、周囲長が異なる測定部位に対して、適切巻きでカフ20を巻付けた場合、図9のように、周囲長が短い(細腕)ほど時間V23は小さくなり、周囲長が長い(太腕)ほどV23は大きくなる。
【0042】
周囲長推定部401は、加圧開始後、検出されるカフ圧に基づき、カフ圧が0mmHg(圧力P2)から20mmHg(圧力P3)まで変化するのに要した時間を時計部45によって計測する。そして、計測した時間に基づきテーブル432を検索することにより、対応する周囲長Lを取得する。周囲長Lは補正係数決定部402に与えられる。補正係数決定部402は、周囲長Lと変更後の加圧速度目標Vとに基づきテーブルTBを検索して、対応する補正係数αを読出す。これにより、補正係数αを決定する。
【0043】
なお、ここでは血圧測定時に周囲長Lを推定(測定)するとしているが、被測定者が測定時に操作部41を操作して入力するとしてもよい。または、予めメモリ部42に被測定者毎に周囲長Lが格納されているとしてもよい。
【0044】
(フローチャート)
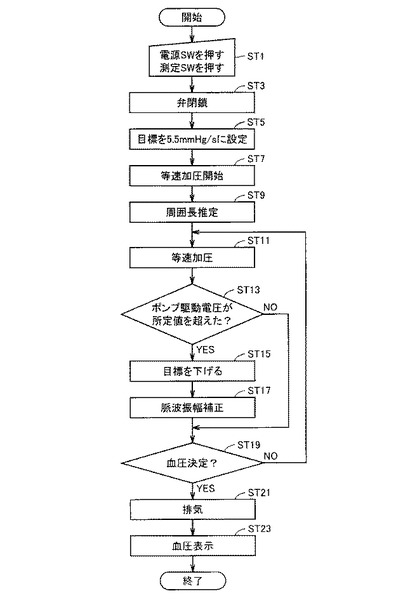
図10は、本実施の形態に係る血圧測定の処理フローチャートである。このフローチャートに従うプログラムは、予めメモリ部42に格納されて、CPU10によりメモリ部42から読出されて、実行される。
【0045】
被測定者は、測定部位にカフ20を適切巻きで巻き付けた状態で、電源スイッチ41A(または測定スイッチ41B)を操作すると(ステップST1)、CPU10は、所定の初期化処理を行い、その後、CPU10は弁駆動回路54に弁52を閉鎖するための制御信号を出力する。これにより、弁駆動回路54によって弁52は閉鎖される(ステップST3)。
【0046】
駆動制御部111は、加圧速度目標を所定値(例えば、5.5mmHg/sec)に初期設定し、加圧制御部115に出力する(ステップST5)。加圧制御部115は、加圧速度目標(5.5mmHg/sec)に従ってカフ圧が等速加圧されるように制御信号をポンプ駆動回路53に出力する。ポンプ駆動回路53は、制御信号に基づき加圧速度目標でカフ圧が等速加圧されるようにポンプ51に対し駆動信号(電圧信号)を出力する。これにより、カフ圧の等速加圧が開始される(ステップST7)。
【0047】
等速加圧開始後において、周囲長推定部401は上述した手順に従って測定部位の周囲長Lを推定する(ステップST9)。推定期間中も、カフ圧の等速加圧は継続する(ステップST11)。
【0048】
等速加圧は、述したようにポンプ51の駆動信号をフィードバック制御することにより行われる。フィードバック制御の過程で、目標変更部114は、ポンプ51の駆動電圧511を逐次入力し、駆動電圧511の電圧値とメモリ部42に格納された所定電圧値(例えば、ポンプ51の駆動電圧の上限512)とを比較し、比較結果に基づき、(駆動電圧511の値>所定電圧値)の条件が成立するか否かを判定する(ステップST13)。
【0049】
条件が成立しないと判定されると(ステップST13でNO)、処理はステップST19に以降する。
【0050】
血圧決定部117は、等速加圧過程において、振幅補正部113から入力する脈波振幅と、圧力検出部112により検出されるカフ圧に基づき、オシロメトリック式に従って血圧を決定する。まだ、十分に加圧されない期間は血圧を決定することができないので(ステップST19でNO)、処理はステップST11に戻り、以降の処理が繰返されて等速加圧が進行する。
【0051】
一方、十分に加圧されて血圧が決定すると(ステップST19YES)、減圧制御部116はポンプ51を停止し、弁52を開くような制御信号を出力する。これにより、空気袋21の空気は排気されてカフ圧は減圧する(ステップST21)。減圧制御部116は、圧力検出部112から出力されるカフ圧に基づき排気完了を判断すると、表示制御部120により、血圧決定部117が決定した血圧および脈拍数を表示部40に表示する(ステップST23)。また、決定した血圧および脈拍数は、時計部45が計時する測定時間とともにメモリ部42に格納される。
【0052】
ステップST13に戻り、目標変更部114が、(駆動電圧511の値>所定電圧値512)の条件が成立したことを判定すると(ステップST13でYES)、すなわちポンプ51の出力能力は上限付近に達したと判断される(図7の時刻Tを参照)。
【0053】
目標変更部114は、上記の条件成立を判断すると、加圧速度目標を所定値(例えば、3.0mmHg/sec)に減少させるように変更する(ステップST15)。そして、変更後の加圧速度目標を用いてフィードバック制御による等速加圧が継続する。このように、ポンプ51の出力に余裕のある範囲で等速加圧制御が実施される。この加圧速度目標の変更は複数回実施してもよいし、加圧速度が下限値を下回った時点で測定を停止し、エラー表示してもよい。
【0054】
加圧速度目標の変更がされると、補正係数決定部402は、変更後の加圧速度目標と、ステップST9において推定がされた周囲長Lとに基づきテーブルTBを検索し、対応する補正係数αを読出す。読出した補正係数αを用いて、脈波振幅を補正し、補正後の脈波振幅を血圧決定部117に出力する(ステップST17)。これにより、血圧決定部117では、補正後の脈波振幅と、カフ圧とを用いて血圧が決定される。その後は、上述と同様に、ステップST19以降の処理が繰返される。
【0055】
本実施の形態によれば、加圧速度目標の変更による等速加圧速度の変化に起因して脈波振幅に生じる誤差を排除することにより補正し、補正後の脈波振幅を用いて血圧を決定するので、正確な血圧測定を実施することが可能となる。
【0056】
(実施の形態2)
上述の実施の形態1では、加圧速度目標を再設定することで変更するタイミングは、ポンプ51の駆動電圧511に基づき決定するようにしたが、本実施の形態2にあるように、加圧を開始してから脈波が検出されるタイミングに基づき決定するようにしてもよい。本実施の形態でも、(駆動電圧511≦駆動電圧上限512)の条件が成立する範囲で、すなわちポンプ51の出力が余裕のある範囲で、加圧速度を等速に制御する。
【0057】
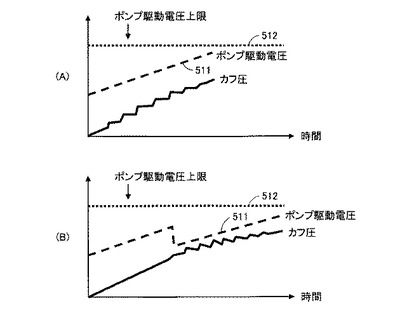
図11は、実施の形態2による加圧過程で脈波が検出されるタイミングを説明する図である。図11の(A)と(B)には、加圧過程における時間経過に従う駆動電圧511の変化と、脈波が重畳するカフ圧の変化が示される。
【0058】
図11の(A)に示すように、比較的に血圧が低い被測定者の場合には、等速加圧の加圧過程において脈波が出現するカフ圧の範囲は低圧であるから、加圧速度目標を変更しなくても血圧測定を完了できる場合がある。
【0059】
一方、図7に示したように、比較的に血圧が高い被測定者の場合には、脈波が出現するカフ圧の範囲内で加圧速度目標を変更する必要が生じ、脈波振幅の補正が必要となる。そこで、被測定者の血圧が高く、脈波が出現するカフ圧の範囲内で加圧速度目標を変更する必要があると予測される場合は、図11の(B)のとおり、あらかじめ低い加圧速度目標で測定を開始することで、加圧速度目標の変更をすることなく、すなわち脈波振幅の補正をすることなく、等速加圧により血圧を決定することができる。
【0060】
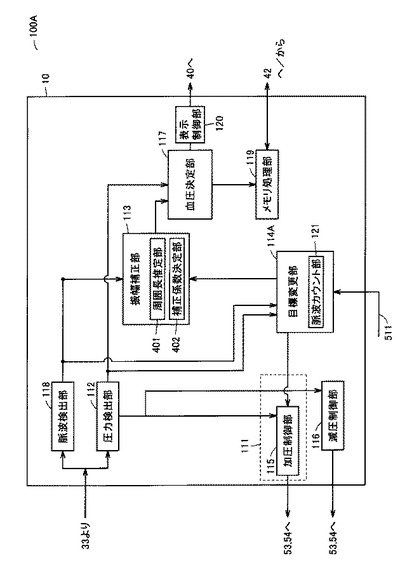
図12は、本実施の形態に係る電子血圧計100Aの機能構成を示す機能ブロック図である。機能構成は、CPU10が有する機能と、その周辺部を用いて示される。
【0061】
図2の機能構成と比較して異なる点は、図12の電子血圧計100Aは、目標変更部114に代替して目標変更部114Aを備える点にある。目標変更部114Aは、圧力検出部112が検出するカフ圧を入力する。また、目標変更部114Aは、脈波検出部118が出力する脈波の数をカウントする脈波カウント部121を有し、カウント値に基づき、加圧速度目標を変更する。
【0062】
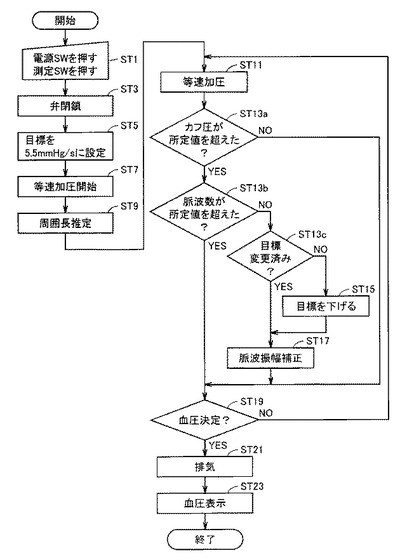
図13は、本実施の形態に係る血圧測定の処理フローチャートである。このフローチャートに従うプログラムは、予めメモリ部42に格納されて、CPU10によりメモリ部42から読出されて、実行される。ず1のフローチャートを参照して本実施の形態に係る血圧測定処理を説明する。
【0063】
まず、ステップST1〜ST11において、図10と同様の処理が行われる。
その後、目標変更部114Aは、圧力検出部112が検出するカフ圧と所定値(例えば50mmHg)とを比較し、比較結果に基づき所定値よりも大きいか否かを判定する(ステップST13a)。カフ圧が所定値よりも大きいと判定すると(ステップST13aでYES)、血圧の高低スクリーニングを実施する(ステップST13b)。
【0064】
具体的には、脈波カウント部121は加圧を開始してから検出される脈波をカウントしており、目標変更部114Aはカウント値と所定値(例えば、2拍)を比較し、比較結果に基づき所定値よりも大きいか否かを判定する(ステップST13b)。
【0065】
検出された脈波数が所定値以下であると判定されると(ステップST13bでNO)、被測定者は血圧が高いと推定されるので、目標変更部114Aは、加圧速度目標の変更を実施する(ステップST13c、ステップST15)。例えば、加圧速度目標を所定値(例えば、3.0mmHg/sec)に低下させ(ステップST15)、変更後の加圧速度目標を用いて等速加圧を実行する。これにより、ポンプ51の出力に余裕のある範囲で等速加圧制御を実施する。
【0066】
加圧速度目標が変更されたことにより、振幅補正部113により、前述と同様に脈波振幅の補正がされて、補正後の脈波振幅を用いて血圧決定部117により血圧決定に処理が行われる(ステップST17)。その後は、前述と同様の処理(ステップST19〜ステップST23)が行われる。
【0067】
ステップST13aとステップST13bに戻り、カフ圧が所定圧未満の期間において脈波のカウント値が所定値以下と判定される間(ステップST13aでYES、ステップST13bでYES)は、加圧速度目標は変更されることなく等速加圧が進行する。
【0068】
なお、血圧の高低スクリーニングの実施に代替して、被測定者が、自己の血圧が高い/低いを指示する情報を予め操作部41から入力しておくとしてもよい。または、被測定者の過去に測定された血圧をメモリ部42から読出し、基準血圧と比較し、その結果に基づき血圧が高い/低いを判定するようにしてもよい。
【0069】
ここでは、加圧開始後からカフ圧が50mmHgになる範囲で検出される脈波の数をカウントしたが、カウント対象とするカフ圧の所定範囲はこの範囲に限定されるものではない。
【0070】
本実施の形態によれば、加圧開始から比較的に初期の期間に検出される脈波数に基づき、被測定者の血圧の高低を推定し、その結果に基づき加圧速度目標を変更する。これにより、比較的に血圧が高い被測定者の場合には、加圧開始から比較的に初期の期間において低い加圧速度目標に変更して等速加圧を行うことで、その後は、加圧速度目標の変更をすることなく、すなわち脈波振幅の補正をすることなく血圧を決定することが可能となる。
【0071】
(実施の形態3)
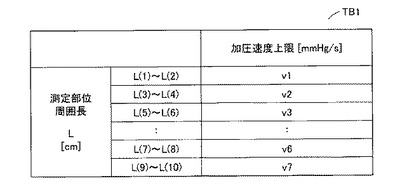
上述の実施の形態1と2では、再設定される変更後の加圧速度目標は所定値(例えば、3.0mmHg/sec)の固定値としていたが、本実施の形態3のように、周囲長Lにより可変に変更してもよい。つまり、測定部位の周囲長Lが大きいほど、カフ20の容量は大きくなるので、ポンプ51には高い出力(多い吐出量)が求められる。したがって、限られた吐出量で等速加圧するためには、周囲長Lによって加圧速度目標を決定することが望ましい。
【0072】
なお、本実施の形態でも、(駆動電圧511≦駆動電圧上限512)の条件が成立する範囲で、すなわちポンプ51の出力が余裕のある範囲で、加圧速度を等速に制御する。
【0073】
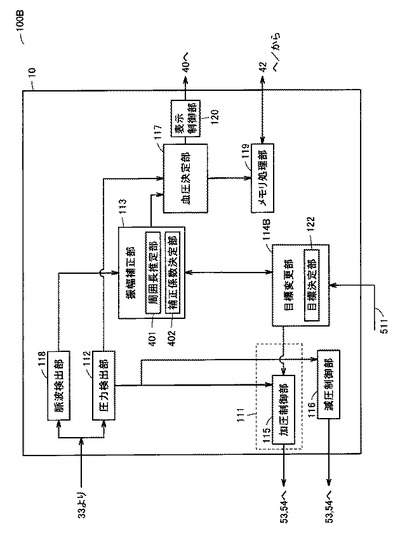
図14は、本実施の形態3に係る電子血圧計100Bの機能構成を示す機能ブロック図である。機能構成は、CPU10が有する機能と、その周辺部を用いて示される。
【0074】
図15は、本実施の形態に係る加圧速度目標を決定するためのテーブルTB1を示す図である。図14を参照して、図2の機能構成と比較して異なる点は、電子血圧計100Bは、目標変更部114に代替して目標変更部114Bを備える点にある。目標変更部114Bは、周囲長推定部401が推定する周囲長Lを入力し、周囲長Lに基づき図15のテーブルTB1を検索して、変更後の加圧速度目標を決定する目標決定部122を有する。
【0075】
テーブルTB1は予めメモリ部42に格納されている。加圧過程で加圧速度目標を変更する場合には、目標決定部122は、推定されている周囲長Lに基づき、テーブルTB1を検索して対応する加圧速度vを読出す。目標変更部114Bは、読出された加圧速度vを、変更後の加圧速度目標として決定する。
【0076】
なお、この目標決定部122は、図12の電子血圧計100Aの目標変更部114Aが備えるようにしてもよい。
【0077】
これにより、測定部位の周囲長Lに応じて加圧速度目標を設定できて、等速加圧することができる。
【0078】
今回開示された実施の形態はすべての点で例示であって制限的なものではないと考えられるべきである。本発明の範囲は上記した説明ではなくて特許請求の範囲によって示され、特許請求の範囲と均等の意味および範囲内でのすべての変更が含まれることが意図される。
【符号の説明】
【0079】
20 カフ、51 ポンプ、52 弁、53 ポンプ駆動回路、54 弁駆動回路、100,100A,100B 電子血圧計、111 駆動制御部、112 圧力検出部、113 振幅補正部、114,114A,114B 目標変更部、115 加圧制御部、116 減圧制御部、117 血圧決定部、118 脈波検出部、119 メモリ処理部、120 表示制御部、121 脈波カウント部、122 目標決定部、401 周囲長推定部、402 補正係数決定部、432,433,TB1 テーブル、511 駆動電圧、512 駆動電圧上限。
【技術分野】
【0001】
本発明は電子血圧計に関し、特に、測定部位から検出される脈波を用いて血圧を測定する電子血圧計に関する。
【背景技術】
【0002】
血圧は循環器系疾患を解析する指標の一つであり、血圧に基づいてリスク解析を行うことは、例えば脳卒中や心不全や心筋梗塞などの心血管系の疾患の予防に有効である。従来は通院時や健康診断時などの医療機関で測定される血圧(随時血圧)により診断が行われていた。しかしながら近年の研究により、家庭で測定する血圧(家庭血圧)が随時血圧より循環器系疾患の診断に有用であることが判明してきた。それに伴い、家庭で使用する血圧計が普及している。
【0003】
家庭向けの血圧計の多くがオシロメトリック法による血圧測定方法を採用している。オシロメトリック法による血圧測定は、カフを上腕などの測定部位に巻付け、カフの内圧(カフ圧)を収縮期血圧より所定圧(例えば30mmHg)だけ高く加圧し、その後、徐々にまたは段階的にカフ圧を減圧していく。この減圧過程における動脈の容積変化をカフ圧に重畳した圧変化(脈波振幅)として検出し、この脈波振幅の変化より収縮期血圧および拡張期血圧を決定する方法である。オシロメトリック法では、カフ圧の加圧過程において発生する脈波振幅を検出して血圧を測定することも可能である。
【0004】
これらの血圧測定において正確に脈波振幅を検出するためには、ポンプまたは弁によりカフ圧を一定速度で、加圧または減圧する必要がある。そこで、特許文献1(特開2006−129920号公報)では、等速加圧制御、または等速減圧制御では平均速度と目標速度との差に基づいて、平均速度が目標速度となるようにポンプまたは弁の駆動電圧をフィードバック制御する。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2006−129920号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
図16は、従来の血圧計のポンプの出力流量と、カフ圧の関係を模式的に示す図である。図17には、従来のカフ圧の等速加圧とポンプ駆動電圧の関係が模式的に示される。家庭用の血圧計においては、ユーザビリティ向上の観点から小型化や低コスト化が求められており、それに応えるためにポンプは小型である。図16に示されるように、ポンプのサイズとポンプからの空気などの流体の出力流量はトレードオフの関係にあるため、大型のポンプに比較し小型のポンプは所望の加圧速度を達成できない場合がある。
【0007】
また、小型のポンプの場合には、加圧速度を目標速度に一致させるようにフィードバック制御される駆動電圧がポンプ駆動の上限電圧を超えてしまった場合、それ以上に速度を増加させることができず、カフ圧を等速で加圧することができない(図17参照)。この場合は脈波1拍内での圧力変動要因として、脈波の容積変化成分のみならず、加圧速度変化成分も含まれるため、脈波振幅の検出精度が低下する。そのため血圧算出精度も低下してしまう。
【0008】
それゆえに、本発明の目的は、カフ圧の加圧速度の変化による誤差を排除した脈波から血圧を算出することのできる電子血圧計を提供することである。
【課題を解決するための手段】
【0009】
この発明のある局面に従う電子血圧計は、被測定者の測定部位の周囲に巻付けられるカフと、カフ内に流体を供給するためのポンプを制御することにより、前記カフ内の圧力を調整するための調整部と、血圧測定中に、加圧速度目標に従ってカフ内の圧力が等速加圧されるように調整部を制御する制御部と、カフ内の圧力を表わすカフ圧を検出するための圧力検出部と、カフ圧に重畳する脈波を検出するための脈波検出部と、検出されるカフ圧と、脈波振幅とに基づいて血圧を算出するための血圧算出部と、加圧速度目標を可変に変更する目標変更部と、を備える。血圧算出部は、加圧速度目標の変更による脈波振幅の誤差を補正するように脈波振幅を変更し、カフ圧と変更後の脈波振幅とに基づいて血圧を算出する。
【発明の効果】
【0010】
本発明によれば、カフ圧の加圧速度の変化による誤差を排除した脈波から血圧を算出することができる。
【図面の簡単な説明】
【0011】
【図1】実施の形態1に係る電子血圧計のハードウェア構成を表わすブロック図である。
【図2】実施の形態1に係る電子血圧計の機能構成を示すブロック図である。
【図3】加圧速度が脈波振幅に与える影響と、脈波の振幅補正について説明する図である。
【図4】加圧速度が脈波振幅に与える影響と、脈波の振幅補正について説明する図である。
【図5】カフコンプライアンス特性を示す図である。
【図6】実施の形態に係る補正係数を格納するテーブルを示す図である。
【図7】実施の形態による脈波振幅の補正を模式的に示す図である。
【図8】実施の形態に係る周囲長を推定するために参照されるテーブルを示す図である。
【図9】実施の形態によるカフ圧‐加圧時間特性(適切巻きの場合)のグラフである。
【図10】実施の形態1に係る血圧測定の処理フローチャートである。
【図11】実施の形態2による加圧過程で脈波が検出されるタイミングを説明する図である。
【図12】実施の形態2に係る電子血圧計の機能構成を示す機能ブロック図である。
【図13】実施の形態2に係る血圧測定の処理フローチャートである。
【図14】実施の形態3に係る電子血圧計の機能構成を示す機能ブロック図である。
【図15】実施の形態3に係る加圧速度目標を決定するためのテーブルを示す図である。
【図16】従来の血圧計のポンプの出力流量と、カフ圧の関係を模式的に示す図である。
【図17】従来のカフ圧の等速加圧とポンプ駆動電圧の関係を模式的に示す図である。
【発明を実施するための形態】
【0012】
以下、図面を参照しつつ、本発明の各実施の形態について説明する。以下の説明では、同一の部品には同一の符号を付してある。それらの名称および機能も同じである。したがって、それらについての詳細な説明は繰り返さない。
【0013】
(実施の形態1)
図1は、本実施の形態に係る電子血圧計100のハードウェア構成を表わすブロック図である。図1を参照して、電子血圧計100は血圧測定部位に装着されるカフ20およびエア系300を備える。カフ20は空気袋21を含む。空気袋21は、エアチューブ31を介して、エア系300に接続される。
【0014】
電子血圧計100は、さらに表示部40、操作部41および各部を集中的に制御し、各種演算処理を行なうためのCPU(Central Processing Unit)10、CPU10に所定の動作をさせるためのプログラムや各種データを記憶するためのメモリ部42、各部に電力を供給するための電源44、計時動作を行なうための時計部45を含む。メモリ部42は、測定された血圧を記憶するための不揮発性メモリ(例えばフラッシュメモリ)などを含む。
【0015】
操作部41は、電源をONまたはOFFするための操作を受付ける電源スイッチ41A、測定開始の操作を受付けるための測定スイッチ41B、測定停止の指示の操作を受付けるための停止スイッチ41C、およびユーザ(被測定者)を選択的に指定する操作を受付けるための使用者選択スイッチ41Eを有する。操作部41は、フラッシュメモリに格納された測定血圧などの情報を読出し表示部に表示させる操作を受付けるための図示のないスイッチも有する。
【0016】
本実施の形態では、電子血圧計100は複数の被測定者により共用されることから、使用者選択スイッチ41Eを備えるが、共用されない場合には使用者選択スイッチ41Eは省略されてよい。また、測定スイッチ41Bを、電源スイッチ41Aと兼用してもよい。その場合には、測定スイッチ41Bは省略することができる。
【0017】
エア系300は、空気袋21内の圧力(以下、カフ圧という)を検出するための圧力センサ32、カフ圧を加圧するために、空気袋21に空気を供給するためのポンプ51、および空気袋21の空気を排出しまたは封入するために開閉される弁52を含む。電子血圧計100は、エア系300に関連して、発振回路33、ポンプ駆動回路53、および弁駆動回路54を含む。ここでは、ポンプ51、弁52、ポンプ駆動回路53および弁駆動回路54は、カフ圧を調整するための調整部30に相当する。
【0018】
ポンプ51には、モータを駆動源として用いるポンプ、圧電素子を駆動源として用いた圧電マイクロポンプなどを適用することができる。
【0019】
圧力センサ32は、静電容量形の圧力センサであり、カフ圧により容量値が変化する。発振回路33は、圧力センサ32の容量値に応じた発振周波数の信号(以下、圧力信号という)をCPU10に出力する。CPU10は、発振回路33から得られる信号を圧力に変換することによってカフ圧を検知する。ポンプ駆動回路53は、CPU10から与えられる制御信号に基づいてポンプ51を制御する。弁駆動回路54はCPU10から与えられる制御信号に基づいて弁52の開閉を制御する。
【0020】
なお、カフ20に供給される流体は空気に限定されるものではなく、例えば液体やゲルであってもよい。あるいは、流体に限定されるものではなく、マイクロビーズなどの均一な微粒子であってもよい。
【0021】
(機能構成)
図2は、本実施の形態に係る電子血圧計100の機能構成を示す機能ブロック図である。機能構成は、CPU10が有する機能と、その周辺部を用いて示される。
【0022】
図2を参照して、CPU10は、発振回路33からの圧力信号を入力する脈波検出部118および圧力検出部112、脈波の振幅を補正するための振幅補正部113、血圧測定に際しての加圧速度の目標(以下、加圧速度目標という)を変更する目標変更部114、ポンプ駆動回路53と弁駆動回路54とに制御信号を出力する加圧制御部115および減圧制御部116、血圧値を決定する血圧決定部117、メモリ部42のフラッシュメモリのデータを読み書き(アクセス)するためのメモリ処理部119、および表示部40の表示を制御する表示制御部120を備える。加圧制御部115と減圧制御部116は、血圧測定中に調整部30を駆動制御することにより、加圧速度目標に従ってカフ圧を加圧させるための駆動制御部111に相当する。
【0023】
加圧制御部115および減圧制御部116は、カフ圧を調整するために、ポンプ駆動回路53および弁駆動回路54に制御信号を送信する。具体的には、カフ圧を加圧し、または減圧するための制御信号を出力する。本実施の形態では、カフ圧を加圧速度目標で加圧する過程において、血圧決定部117による血圧導出処理が行なわれる。脈波検出部118は、発振回路33からの圧力信号に重畳される動脈の容積変化を表す脈波信号を、フィルタ回路を用いて検出する。圧力検出部112は、カフ圧を検出するために、発振回路33からの圧力信号を圧力値に変換し、出力する。
【0024】
振幅補正部113は、周囲長推定部401および補正係数決定部402を含む。カフ20は、測定部位である例えば上腕(または手首)に巻き付けられる。周囲長推定部401は、カフ20が巻き付けられた測定部位の周囲(腕周)の長さを推定する。補正係数決定部402は、変更前後の加圧速度目標に基づき、脈波振幅を補正するための係数を決定する。
【0025】
血圧決定部117は、オシロメトリック式に従い血圧を決定する。具体的には、血圧測定時に圧力検出部112から入力するカフ圧と、脈波検出部118により検出された脈波、または振幅補正部113により振幅が補正された脈波とを用いて、脈波振幅の推移とカフ圧とに基づき血圧を決定する。例えば、脈波振幅の最大値に対応するカフ圧を平均血圧、また脈波振幅の最大値の50%に相当する高カフ圧側の脈波振幅に対応するカフ圧を収縮期血圧、また脈波振幅の最大値の70%に相当する低カフ圧側の脈波振幅に対応するカフ圧を拡張期血圧と決定する。また、脈拍数を、脈波信号を用いて公知の手順に従って算出する。したがって、ここでは、振幅補正部113および血圧決定部117は、血圧を算出するための血圧算出部に相当する。
【0026】
(ポンプ51のフィードバック制御)
オシロメトリック式に従って血圧測定する場合には、測定精度を得るために、カフ圧を一定の加圧速度目標で加圧しなければならない。つまり、目標変更部114は、血圧測定開始時に加圧制御部115に対して目標速度の初期値を与える。加圧制御部115は、圧力検出部112から定期的に入力するカフ圧に基づきカフ圧の変化速度を算出し、算出した変化速度と、目標変更部114から与えられる加圧速度目標と比較し、比較結果に基づく両者の差に基づく制御信号を生成し、ポンプ駆動回路53に出力する。このように、加圧速度が、加圧速度目標となるようにポンプ51はフィードバック制御される。
【0027】
ここでは、ポンプ51の吐出流量がポンプ駆動回路53から与えられる電圧に比例すると想定する。ポンプ駆動回路53は、制御信号に応じた電圧信号をポンプ51に出力する。ポンプ駆動回路53の出力段には図示のない電圧センサが設けられて、当該電圧センサによりポンプ51を駆動するための電圧が検出され、検出電圧を示す駆動電圧511が目標変更部114に出力される。
【0028】
目標変更部114は、駆動電圧511と、ポンプ51に固有の駆動電圧上限512とを比較し、比較結果に基づき、(駆動電圧511>駆動電圧上限512)の条件が成立しポンプ51の出力は最大であり余裕がないと判定すると、加圧速度目標を下げるように変更する。そして、変更後の加圧速度目標を用いてフィードバック制御が行われる。これにより、ポンプ51の出力に余裕のある範囲で加圧速度を等速に制御できる。
【0029】
(脈波振幅の補正)
オシロメトリック式によれば、血圧の測定精度は、脈波振幅に依存するが、図16と図17で説明したように、脈波振幅には、脈波1拍内での血管の容積変化成分のみならずカフ圧の変化速度の成分も含むから、後者の成分に起因した脈波振幅の誤差を排除するように補正する必要がある。そこで、本実施の形態では、上述した加圧速度目標の変更に起因した誤差を排除することにより、脈波振幅を補正する。
【0030】
ここで、図3と4を参照して、加圧速度が脈波振幅に与える影響と、振幅補正について説明する。図3と4は発明者らの実験によるデータであり、減圧過程における減圧速度が脈波振幅に与える影響を示す。なお、図3と図4で示す原理は、加圧過程であっても同様に適用することができる。
【0031】
図3と図4では、減圧速度が速い場合と遅い場合とで、下段にはカフ圧の時間変化が示され、中段にはカフ容積の時間変化が示され、上段には測定部位の動脈血管の容積の時間変化が示される。これらは同一期間における変化を示す。図3と図4では、上段のように心臓の拍動による血管の容積変化ΔVが等しい場合であっても、中段に示すようにカフ容積波形の基線(点線で図示)に対するカフ容積変化の最大値は減圧速度によって相違する(すなわち、ΔVa<ΔVb)。この容積変化はカフ圧変化として表われるため、減圧速度が遅いほどカフ20の容積変化が大きくなり、下段のようにカフ圧変化も相違する(すなわち、ΔPa<ΔPb)。したがって、同様に血管容積が変化する場合であっても、減圧速度または加圧速度によって検出される脈波振幅は相違することになる。
【0032】
また、図5に示すカフコンプライアンス特性から、測定部位が太い(周囲長が長い)ほどカフコンプライアンスが大きくなるため、同様の血管容積変化であっても、測定部位の太さにより算出される脈波振幅が異なる、ことがわかる。なお、ここでいうカフコンプライアンスとはカフ圧を1mmHg変化させるのに必要な容積であり、単位は[ml/mmHg]である。
【0033】
したがって、カフ20の加圧速度を変化させた場合に検出される脈波振幅は、加圧速度の変化率と測定部位の周囲長に応じて決定する必要がある。ここで、加圧速度の変化率は、加圧速度目標の変化率に応じて決まる。ここで、変化率は、変更前の加圧速度目標と変更後の加圧速度目標との比を指す。
【0034】
メモリ部42には、測定部位の周囲長Lと、変更後の加圧速度目標V(ここでは、変更前の加圧速度目標は一定としている)とに応じた補正係数αを格納した図6のテーブルTBが格納される。したがって、テーブルTBには、周囲長Lと加圧速度目標の変化率の各組に対応して補正係数αが格納されると言える。図6のデータは、実験等により取得される。
【0035】
血圧測定時には、加圧開始直後の圧力変化特性に基づき周囲長推定部401により測定部位の周囲長Lを推定する。そして、目標変更部114によって加圧速度目標が変更された後は、補正係数決定部402は周囲長Lと変更後の加圧速度目標Vとに基づきテーブルTBを検索して、対応する補正係数αを読出す。これにより、補正係数αが決定する。
【0036】
振幅補正部113は、脈波検出部118から入力する脈波信号(圧力信号)から1拍毎に脈波を抽出する。具体的には、圧力信号が示す圧力の現在値と先行値との差を算出し、差が基準を超えるか否かを判定し、判定結果に基づき信号の立上がり/立下り点を抽出する。これにより、脈波(1振幅)を抽出できる。
【0037】
振幅補正部113は、抽出された脈波の振幅値を、補正係数αを用いて補正する。つまり、検出した脈波振幅値AmpをAmp×αにより補正する。補正後の脈波を血圧決定部117に出力する。血圧決定部117は、振幅が補正された脈波を用いてオシロメトリック式に従って血圧を決定する。
【0038】
図7には、本実施の形態による脈波振幅補正が模式的に示される。図7によれば、上述したようにポンプ51の出力が余裕のある範囲で、等速加圧のための加圧速度目標が変更されると、変更に起因する脈波振幅の誤差は、上述の振幅補正により排除することができる。
【0039】
(周囲長推定)
本実施の形態による測定部位の周囲長の推定について説明する。図8は、本実施の形態に係る測定部位周囲長Lを推定するために参照されるテーブル433の一例を示す図である。テーブル433には、カフ20の測定部位に対する巻付け状態が“適切巻き”の場合においてカフ圧を所定圧力だけ加圧するのに要する等速加圧の時間と、対応する周囲長Lが格納される。テーブル433のデータは、予め実験等により取得される。図9は、本実施の形態によるカフ圧‐加圧時間特性(適切巻きの場合)のグラフである。図8と図9のデータは、電子血圧計100を用いて多くの被験者からサンプリングしたデータに基づく値を指す。ここで、“適切巻き”とは、測定部位の周囲長に対して巻付けられたカフ20の内径(測定部位である腕の断面の径)による円周の長さにほぼ等しい状態を指す。本実施の形態では、適切巻きの状態において血圧測定がされると想定する。
【0040】
測定部位に巻付けたカフ20のカフ圧と、カフ20内へ供給する流体(本実施の形態では、空気)の容積変化に基づき、カフ圧が、圧力P2から圧力P3になるまでに必要な空気は、流体容積ΔV23であるとする(図9参照)。加圧過程でポンプ51が等速加圧(一定回転数)の下で流体容積ΔV23の空気を供給するのに要する加圧時間は、一定時間(ここでは、時刻V2〜時刻V3の時間V23)となる。しかしながら、時間V23は、測定部位の周囲長Lに依存して変化する。
【0041】
例えば、周囲長が異なる測定部位に対して、適切巻きでカフ20を巻付けた場合、図9のように、周囲長が短い(細腕)ほど時間V23は小さくなり、周囲長が長い(太腕)ほどV23は大きくなる。
【0042】
周囲長推定部401は、加圧開始後、検出されるカフ圧に基づき、カフ圧が0mmHg(圧力P2)から20mmHg(圧力P3)まで変化するのに要した時間を時計部45によって計測する。そして、計測した時間に基づきテーブル432を検索することにより、対応する周囲長Lを取得する。周囲長Lは補正係数決定部402に与えられる。補正係数決定部402は、周囲長Lと変更後の加圧速度目標Vとに基づきテーブルTBを検索して、対応する補正係数αを読出す。これにより、補正係数αを決定する。
【0043】
なお、ここでは血圧測定時に周囲長Lを推定(測定)するとしているが、被測定者が測定時に操作部41を操作して入力するとしてもよい。または、予めメモリ部42に被測定者毎に周囲長Lが格納されているとしてもよい。
【0044】
(フローチャート)
図10は、本実施の形態に係る血圧測定の処理フローチャートである。このフローチャートに従うプログラムは、予めメモリ部42に格納されて、CPU10によりメモリ部42から読出されて、実行される。
【0045】
被測定者は、測定部位にカフ20を適切巻きで巻き付けた状態で、電源スイッチ41A(または測定スイッチ41B)を操作すると(ステップST1)、CPU10は、所定の初期化処理を行い、その後、CPU10は弁駆動回路54に弁52を閉鎖するための制御信号を出力する。これにより、弁駆動回路54によって弁52は閉鎖される(ステップST3)。
【0046】
駆動制御部111は、加圧速度目標を所定値(例えば、5.5mmHg/sec)に初期設定し、加圧制御部115に出力する(ステップST5)。加圧制御部115は、加圧速度目標(5.5mmHg/sec)に従ってカフ圧が等速加圧されるように制御信号をポンプ駆動回路53に出力する。ポンプ駆動回路53は、制御信号に基づき加圧速度目標でカフ圧が等速加圧されるようにポンプ51に対し駆動信号(電圧信号)を出力する。これにより、カフ圧の等速加圧が開始される(ステップST7)。
【0047】
等速加圧開始後において、周囲長推定部401は上述した手順に従って測定部位の周囲長Lを推定する(ステップST9)。推定期間中も、カフ圧の等速加圧は継続する(ステップST11)。
【0048】
等速加圧は、述したようにポンプ51の駆動信号をフィードバック制御することにより行われる。フィードバック制御の過程で、目標変更部114は、ポンプ51の駆動電圧511を逐次入力し、駆動電圧511の電圧値とメモリ部42に格納された所定電圧値(例えば、ポンプ51の駆動電圧の上限512)とを比較し、比較結果に基づき、(駆動電圧511の値>所定電圧値)の条件が成立するか否かを判定する(ステップST13)。
【0049】
条件が成立しないと判定されると(ステップST13でNO)、処理はステップST19に以降する。
【0050】
血圧決定部117は、等速加圧過程において、振幅補正部113から入力する脈波振幅と、圧力検出部112により検出されるカフ圧に基づき、オシロメトリック式に従って血圧を決定する。まだ、十分に加圧されない期間は血圧を決定することができないので(ステップST19でNO)、処理はステップST11に戻り、以降の処理が繰返されて等速加圧が進行する。
【0051】
一方、十分に加圧されて血圧が決定すると(ステップST19YES)、減圧制御部116はポンプ51を停止し、弁52を開くような制御信号を出力する。これにより、空気袋21の空気は排気されてカフ圧は減圧する(ステップST21)。減圧制御部116は、圧力検出部112から出力されるカフ圧に基づき排気完了を判断すると、表示制御部120により、血圧決定部117が決定した血圧および脈拍数を表示部40に表示する(ステップST23)。また、決定した血圧および脈拍数は、時計部45が計時する測定時間とともにメモリ部42に格納される。
【0052】
ステップST13に戻り、目標変更部114が、(駆動電圧511の値>所定電圧値512)の条件が成立したことを判定すると(ステップST13でYES)、すなわちポンプ51の出力能力は上限付近に達したと判断される(図7の時刻Tを参照)。
【0053】
目標変更部114は、上記の条件成立を判断すると、加圧速度目標を所定値(例えば、3.0mmHg/sec)に減少させるように変更する(ステップST15)。そして、変更後の加圧速度目標を用いてフィードバック制御による等速加圧が継続する。このように、ポンプ51の出力に余裕のある範囲で等速加圧制御が実施される。この加圧速度目標の変更は複数回実施してもよいし、加圧速度が下限値を下回った時点で測定を停止し、エラー表示してもよい。
【0054】
加圧速度目標の変更がされると、補正係数決定部402は、変更後の加圧速度目標と、ステップST9において推定がされた周囲長Lとに基づきテーブルTBを検索し、対応する補正係数αを読出す。読出した補正係数αを用いて、脈波振幅を補正し、補正後の脈波振幅を血圧決定部117に出力する(ステップST17)。これにより、血圧決定部117では、補正後の脈波振幅と、カフ圧とを用いて血圧が決定される。その後は、上述と同様に、ステップST19以降の処理が繰返される。
【0055】
本実施の形態によれば、加圧速度目標の変更による等速加圧速度の変化に起因して脈波振幅に生じる誤差を排除することにより補正し、補正後の脈波振幅を用いて血圧を決定するので、正確な血圧測定を実施することが可能となる。
【0056】
(実施の形態2)
上述の実施の形態1では、加圧速度目標を再設定することで変更するタイミングは、ポンプ51の駆動電圧511に基づき決定するようにしたが、本実施の形態2にあるように、加圧を開始してから脈波が検出されるタイミングに基づき決定するようにしてもよい。本実施の形態でも、(駆動電圧511≦駆動電圧上限512)の条件が成立する範囲で、すなわちポンプ51の出力が余裕のある範囲で、加圧速度を等速に制御する。
【0057】
図11は、実施の形態2による加圧過程で脈波が検出されるタイミングを説明する図である。図11の(A)と(B)には、加圧過程における時間経過に従う駆動電圧511の変化と、脈波が重畳するカフ圧の変化が示される。
【0058】
図11の(A)に示すように、比較的に血圧が低い被測定者の場合には、等速加圧の加圧過程において脈波が出現するカフ圧の範囲は低圧であるから、加圧速度目標を変更しなくても血圧測定を完了できる場合がある。
【0059】
一方、図7に示したように、比較的に血圧が高い被測定者の場合には、脈波が出現するカフ圧の範囲内で加圧速度目標を変更する必要が生じ、脈波振幅の補正が必要となる。そこで、被測定者の血圧が高く、脈波が出現するカフ圧の範囲内で加圧速度目標を変更する必要があると予測される場合は、図11の(B)のとおり、あらかじめ低い加圧速度目標で測定を開始することで、加圧速度目標の変更をすることなく、すなわち脈波振幅の補正をすることなく、等速加圧により血圧を決定することができる。
【0060】
図12は、本実施の形態に係る電子血圧計100Aの機能構成を示す機能ブロック図である。機能構成は、CPU10が有する機能と、その周辺部を用いて示される。
【0061】
図2の機能構成と比較して異なる点は、図12の電子血圧計100Aは、目標変更部114に代替して目標変更部114Aを備える点にある。目標変更部114Aは、圧力検出部112が検出するカフ圧を入力する。また、目標変更部114Aは、脈波検出部118が出力する脈波の数をカウントする脈波カウント部121を有し、カウント値に基づき、加圧速度目標を変更する。
【0062】
図13は、本実施の形態に係る血圧測定の処理フローチャートである。このフローチャートに従うプログラムは、予めメモリ部42に格納されて、CPU10によりメモリ部42から読出されて、実行される。ず1のフローチャートを参照して本実施の形態に係る血圧測定処理を説明する。
【0063】
まず、ステップST1〜ST11において、図10と同様の処理が行われる。
その後、目標変更部114Aは、圧力検出部112が検出するカフ圧と所定値(例えば50mmHg)とを比較し、比較結果に基づき所定値よりも大きいか否かを判定する(ステップST13a)。カフ圧が所定値よりも大きいと判定すると(ステップST13aでYES)、血圧の高低スクリーニングを実施する(ステップST13b)。
【0064】
具体的には、脈波カウント部121は加圧を開始してから検出される脈波をカウントしており、目標変更部114Aはカウント値と所定値(例えば、2拍)を比較し、比較結果に基づき所定値よりも大きいか否かを判定する(ステップST13b)。
【0065】
検出された脈波数が所定値以下であると判定されると(ステップST13bでNO)、被測定者は血圧が高いと推定されるので、目標変更部114Aは、加圧速度目標の変更を実施する(ステップST13c、ステップST15)。例えば、加圧速度目標を所定値(例えば、3.0mmHg/sec)に低下させ(ステップST15)、変更後の加圧速度目標を用いて等速加圧を実行する。これにより、ポンプ51の出力に余裕のある範囲で等速加圧制御を実施する。
【0066】
加圧速度目標が変更されたことにより、振幅補正部113により、前述と同様に脈波振幅の補正がされて、補正後の脈波振幅を用いて血圧決定部117により血圧決定に処理が行われる(ステップST17)。その後は、前述と同様の処理(ステップST19〜ステップST23)が行われる。
【0067】
ステップST13aとステップST13bに戻り、カフ圧が所定圧未満の期間において脈波のカウント値が所定値以下と判定される間(ステップST13aでYES、ステップST13bでYES)は、加圧速度目標は変更されることなく等速加圧が進行する。
【0068】
なお、血圧の高低スクリーニングの実施に代替して、被測定者が、自己の血圧が高い/低いを指示する情報を予め操作部41から入力しておくとしてもよい。または、被測定者の過去に測定された血圧をメモリ部42から読出し、基準血圧と比較し、その結果に基づき血圧が高い/低いを判定するようにしてもよい。
【0069】
ここでは、加圧開始後からカフ圧が50mmHgになる範囲で検出される脈波の数をカウントしたが、カウント対象とするカフ圧の所定範囲はこの範囲に限定されるものではない。
【0070】
本実施の形態によれば、加圧開始から比較的に初期の期間に検出される脈波数に基づき、被測定者の血圧の高低を推定し、その結果に基づき加圧速度目標を変更する。これにより、比較的に血圧が高い被測定者の場合には、加圧開始から比較的に初期の期間において低い加圧速度目標に変更して等速加圧を行うことで、その後は、加圧速度目標の変更をすることなく、すなわち脈波振幅の補正をすることなく血圧を決定することが可能となる。
【0071】
(実施の形態3)
上述の実施の形態1と2では、再設定される変更後の加圧速度目標は所定値(例えば、3.0mmHg/sec)の固定値としていたが、本実施の形態3のように、周囲長Lにより可変に変更してもよい。つまり、測定部位の周囲長Lが大きいほど、カフ20の容量は大きくなるので、ポンプ51には高い出力(多い吐出量)が求められる。したがって、限られた吐出量で等速加圧するためには、周囲長Lによって加圧速度目標を決定することが望ましい。
【0072】
なお、本実施の形態でも、(駆動電圧511≦駆動電圧上限512)の条件が成立する範囲で、すなわちポンプ51の出力が余裕のある範囲で、加圧速度を等速に制御する。
【0073】
図14は、本実施の形態3に係る電子血圧計100Bの機能構成を示す機能ブロック図である。機能構成は、CPU10が有する機能と、その周辺部を用いて示される。
【0074】
図15は、本実施の形態に係る加圧速度目標を決定するためのテーブルTB1を示す図である。図14を参照して、図2の機能構成と比較して異なる点は、電子血圧計100Bは、目標変更部114に代替して目標変更部114Bを備える点にある。目標変更部114Bは、周囲長推定部401が推定する周囲長Lを入力し、周囲長Lに基づき図15のテーブルTB1を検索して、変更後の加圧速度目標を決定する目標決定部122を有する。
【0075】
テーブルTB1は予めメモリ部42に格納されている。加圧過程で加圧速度目標を変更する場合には、目標決定部122は、推定されている周囲長Lに基づき、テーブルTB1を検索して対応する加圧速度vを読出す。目標変更部114Bは、読出された加圧速度vを、変更後の加圧速度目標として決定する。
【0076】
なお、この目標決定部122は、図12の電子血圧計100Aの目標変更部114Aが備えるようにしてもよい。
【0077】
これにより、測定部位の周囲長Lに応じて加圧速度目標を設定できて、等速加圧することができる。
【0078】
今回開示された実施の形態はすべての点で例示であって制限的なものではないと考えられるべきである。本発明の範囲は上記した説明ではなくて特許請求の範囲によって示され、特許請求の範囲と均等の意味および範囲内でのすべての変更が含まれることが意図される。
【符号の説明】
【0079】
20 カフ、51 ポンプ、52 弁、53 ポンプ駆動回路、54 弁駆動回路、100,100A,100B 電子血圧計、111 駆動制御部、112 圧力検出部、113 振幅補正部、114,114A,114B 目標変更部、115 加圧制御部、116 減圧制御部、117 血圧決定部、118 脈波検出部、119 メモリ処理部、120 表示制御部、121 脈波カウント部、122 目標決定部、401 周囲長推定部、402 補正係数決定部、432,433,TB1 テーブル、511 駆動電圧、512 駆動電圧上限。
【特許請求の範囲】
【請求項1】
被測定者の測定部位の周囲に巻付けられるカフと、
カフ内に流体を供給するためのポンプを制御することにより、前記カフ内の圧力を調整するための調整部と、
血圧測定中に、加圧速度目標に従って前記カフ内の圧力が等速加圧されるように前記調整部を制御する制御部と、
前記カフ内の圧力を表わすカフ圧を検出するための圧力検出部と、
カフ圧に重畳する脈波を検出するための脈波検出部と、
検出されるカフ圧と、脈波振幅とに基づいて血圧を算出するための血圧算出部と、
前記加圧速度目標を可変に変更する目標変更部と、を備え、
前記血圧算出部は、
前記加圧速度目標の変更による脈波振幅の誤差を補正するように脈波振幅を変更し、カフ圧と変更後の脈波振幅とに基づいて血圧を算出する、電子血圧計。
【請求項2】
前記血圧算出部は、
変更前後の加圧速度目標に基づき、前記補正のための係数を決定するための係数決定部を、含み、
決定された係数を用いて、変更前の脈波振幅から変更後の脈波振幅を算出する、請求項1に記載の電子血圧計。
【請求項3】
前記係数決定部は、
変更前の加圧速度目標と変更後の加圧速度目標との比に基づき、前記係数を決定する、請求項2に記載の電子血圧計。
【請求項4】
測定部位の周囲長を取得する周囲長取得部を、備え、
前記係数決定部は、
取得した周囲長と、変更前の加圧速度目標と変更後の加圧速度目標との比に基づき前記係数を決定する、請求項3に記載の電子血圧計。
【請求項5】
前記目標変更部は、前記ポンプが出力可能な範囲内で前記加圧速度目標を可変に変更する、請求項1から4のいずれかに記載の電子血圧計。
【請求項6】
被測定者の血圧の高低を示す情報を取得し、
前記目標変更部は、
加圧速度目標を、取得した前記情報に基づき変更する、請求項1から5のいずれかに記載の電子血圧計。
【請求項7】
加圧開始後から所定範囲のカフ圧が検出される期間において、前記脈波検出部により検出される脈波の数に基づき、被測定者の血圧の高低を示す情報を取得する、請求項6に記載の電子血圧計。
【請求項8】
測定部位の周囲長を取得する周囲長取得部を、備え、
前記目標変更部は、
加圧速度目標を、取得した周囲長に基づき変更する、請求項1から7のいずれかに記載の電子血圧計。
【請求項1】
被測定者の測定部位の周囲に巻付けられるカフと、
カフ内に流体を供給するためのポンプを制御することにより、前記カフ内の圧力を調整するための調整部と、
血圧測定中に、加圧速度目標に従って前記カフ内の圧力が等速加圧されるように前記調整部を制御する制御部と、
前記カフ内の圧力を表わすカフ圧を検出するための圧力検出部と、
カフ圧に重畳する脈波を検出するための脈波検出部と、
検出されるカフ圧と、脈波振幅とに基づいて血圧を算出するための血圧算出部と、
前記加圧速度目標を可変に変更する目標変更部と、を備え、
前記血圧算出部は、
前記加圧速度目標の変更による脈波振幅の誤差を補正するように脈波振幅を変更し、カフ圧と変更後の脈波振幅とに基づいて血圧を算出する、電子血圧計。
【請求項2】
前記血圧算出部は、
変更前後の加圧速度目標に基づき、前記補正のための係数を決定するための係数決定部を、含み、
決定された係数を用いて、変更前の脈波振幅から変更後の脈波振幅を算出する、請求項1に記載の電子血圧計。
【請求項3】
前記係数決定部は、
変更前の加圧速度目標と変更後の加圧速度目標との比に基づき、前記係数を決定する、請求項2に記載の電子血圧計。
【請求項4】
測定部位の周囲長を取得する周囲長取得部を、備え、
前記係数決定部は、
取得した周囲長と、変更前の加圧速度目標と変更後の加圧速度目標との比に基づき前記係数を決定する、請求項3に記載の電子血圧計。
【請求項5】
前記目標変更部は、前記ポンプが出力可能な範囲内で前記加圧速度目標を可変に変更する、請求項1から4のいずれかに記載の電子血圧計。
【請求項6】
被測定者の血圧の高低を示す情報を取得し、
前記目標変更部は、
加圧速度目標を、取得した前記情報に基づき変更する、請求項1から5のいずれかに記載の電子血圧計。
【請求項7】
加圧開始後から所定範囲のカフ圧が検出される期間において、前記脈波検出部により検出される脈波の数に基づき、被測定者の血圧の高低を示す情報を取得する、請求項6に記載の電子血圧計。
【請求項8】
測定部位の周囲長を取得する周囲長取得部を、備え、
前記目標変更部は、
加圧速度目標を、取得した周囲長に基づき変更する、請求項1から7のいずれかに記載の電子血圧計。
【図1】


【図2】
【図3】

【図4】

【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【公開番号】特開2013−90824(P2013−90824A)
【公開日】平成25年5月16日(2013.5.16)
【国際特許分類】
【出願番号】特願2011−235016(P2011−235016)
【出願日】平成23年10月26日(2011.10.26)
【出願人】(503246015)オムロンヘルスケア株式会社 (584)
【Fターム(参考)】
【公開日】平成25年5月16日(2013.5.16)
【国際特許分類】
【出願日】平成23年10月26日(2011.10.26)
【出願人】(503246015)オムロンヘルスケア株式会社 (584)
【Fターム(参考)】
[ Back to top ]