
電子装置、生体画像認証装置、生体画像認証プログラムおよび生体画像認証方法
【課題】手を撮像する非接触センサを電子装置に実装する場合、利用者が手を撮像に適した位置に合わせることができる。
【解決手段】生体画像認証装置1は、手に関する生体情報を非接触で読み取る静脈センサ13と、静脈センサ13を斜めに見下ろした場合の利用者の目線の高さと、静脈センサ13から利用者までの水平距離と、静脈センサ13から当該静脈センサ13上にかざす手までの垂直距離とから視差を算出する視差算出部151と、算出された視差に基づき、利用者の目の位置と静脈センサ13上にかざす手の位置との延長線上であって静脈センサ13が取り付けられた水平面上にマーカの位置を決定するマーカ位置決定部152と、決定された位置のマーカに、手に関する生体情報を読み取る対象部分の中心を合わせるように指示するガイダンス部153とを有する。
【解決手段】生体画像認証装置1は、手に関する生体情報を非接触で読み取る静脈センサ13と、静脈センサ13を斜めに見下ろした場合の利用者の目線の高さと、静脈センサ13から利用者までの水平距離と、静脈センサ13から当該静脈センサ13上にかざす手までの垂直距離とから視差を算出する視差算出部151と、算出された視差に基づき、利用者の目の位置と静脈センサ13上にかざす手の位置との延長線上であって静脈センサ13が取り付けられた水平面上にマーカの位置を決定するマーカ位置決定部152と、決定された位置のマーカに、手に関する生体情報を読み取る対象部分の中心を合わせるように指示するガイダンス部153とを有する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、電子装置などに関する。
【背景技術】
【0002】
近年のバイオメトリクス技術の進展に伴い、手のひらの静脈を用いて個人認証する装置が種々提供されている。
【0003】
例えば、手のひらを撮像する非接触センサの一方の側に、非接触センサで撮像される手の手首を支持する前面ガイドを設置した認証用撮像装置がある。かかる認証用撮像装置は、手のひら認証のための撮像をする際に、前面ガイドにより手のひらを自然とセンサの撮像範囲に誘導することができ、手のひらを的確にセンサの撮像範囲に位置させることができる。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2006−11988号公報
【特許文献2】特開2009−122729号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
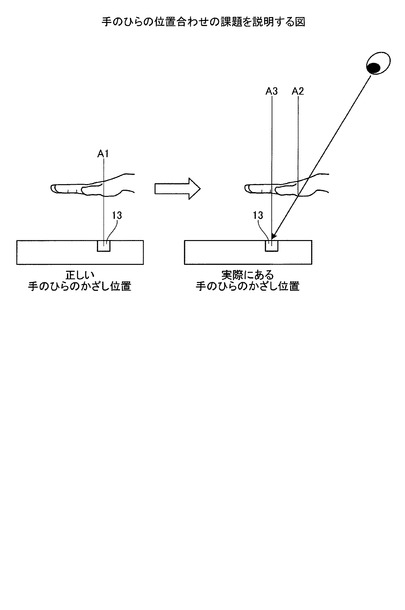
しかしながら、手のひらを撮像する非接触センサを情報処理装置などの電子装置に実装する場合には、利用者が手のひらを撮像に適した位置に合わせることが難しいという問題があった。例えば、手のひらを撮像する非接触センサを情報処理装置のキーボード手前側のパームレストの部分に実装する場合、利用者が手のひらを撮像に適した位置に合わせることが難しい。かかる問題について説明する。図15は、手のひらの位置合わせの課題を説明する図である。図15の符号A1に示すように、正しい手のひらの位置合わせでは、手のひらの中心が静脈センサ13の中心と一致するように位置することが望ましい。ところが、図15の符号A2、A3に示すように、利用者は上から静脈センサ13を斜めに見下ろして手のひらを静脈センサ13上にかざすので、手のひらの中心A2が静脈センサ13の中心A3より利用者側にずれてしまう。したがって、利用者は手のひらを静脈センサ13の撮像に適した位置に合わせることができない。
【0006】
従来の認証用撮像装置は、手首を支持する前面ガイドを設置することにより、手のひらを自然とセンサの撮像範囲に誘導することができる。ところが、手のひらを撮像する非接触センサを実装する電子装置では、物理的に拘束する前面ガイドを設置することが困難である。したがって、かかる電子装置は、従来の認証用撮像装置のように前面ガイドを設置することができず、利用者は手のひらを撮像に適した位置に合わせることができない。
【0007】
なお、上記課題は、手のひらを撮像する非接触センサに限らず、指を撮像する非接触センサ、手のひらや指の指紋を撮像する非接触センサでも同様に生ずる。
【0008】
開示の技術は、手を撮像する非接触センサを電子装置に実装する場合、利用者が手を撮像に適した位置に合わせることができることを目的とする。
【課題を解決するための手段】
【0009】
1つの側面では、電子装置は、手に関する生体情報を非接触で読み取る生体情報読取部と、前記生体情報読取部を斜めに見下ろした場合の利用者の目線の高さと、前記生体情報読取部から前記利用者までの水平距離と、前記生体情報読取部から当該生体情報読取部上にかざす手までの垂直距離とから視差を算出する算出部と、前記算出部によって算出された視差に基づき、前記利用者の目の位置と前記生体情報読取部上にかざす手の位置との延長線上であって前記生体情報読取部が取り付けられた水平面上にマーカの位置を決定する決定部と、前記決定部によって決定された位置のマーカに、手に関する生体情報を読み取る対象部分の中心を合わせるように指示する指示部とを有する。
【発明の効果】
【0010】
本願の開示する情報処理装置の一つの態様によれば、手を撮像する非接触センサを電子装置に実装する場合、利用者が手を撮像に適した位置に合わせることができる。
【図面の簡単な説明】
【0011】
【図1】図1は、実施例1に係る生体画像認証装置の構成を示す機能ブロック図である。
【図2】図2は、制御部で実行されるマーカ位置決定制御を説明する図である。
【図3】図3は、視差算出部による視差算出の説明をする図である。
【図4】図4は、身体情報テーブルのデータ構造の一例を示す図である。
【図5】図5は、マーカ位置決定部によるマーカ位置の決定の説明をする図である。
【図6】図6は、マーカ位置履歴テーブルのデータ構造の一例を示す図である。
【図7】図7は、マーカ位置決定制御(静脈登録時)の処理手順を示すフローチャートである。
【図8】図8は、マーカ位置決定制御(照合時)の処理手順を示すフローチャートである。
【図9】図9は、実施例2に係る生体画像認証装置の構成を示す機能ブロック図である。
【図10】図10は、視差算出情報テーブルのデータ構造の一例を示す図である。
【図11】図11は、視差算出部による視差算出の説明をする図である。
【図12】図12は、マーカ位置決定制御(静脈登録時)の処理手順を示すフローチャートである。
【図13】図13は、マーカ位置決定制御(照合時)の処理手順を示すフローチャートである。
【図14】図14は、生体画像認証処理プログラムを実行するコンピュータを示す図である。
【図15】図15は、手のひらの位置合わせの課題を説明する図である。
【発明を実施するための形態】
【0012】
以下に、本願の開示する電子装置、生体画像認証装置、生体画像認証プログラムおよび生体画像認証方法の実施例を図面に基づいて詳細に説明する。なお、以下の実施例では、キーボードの手前側のパームレストの部分に手のひら静脈センサを実装した生体画像認証装置に適用した場合を示す。しかし、本実施例によりこの発明が限定されるものではなく、本発明は、キーボードの手前側のパームレストの部分に生体情報を読み取るセンサを実装した電子装置に広く適用可能であり、ノート型のパーソナルコンピュータにも適用可能である。
【実施例1】
【0013】
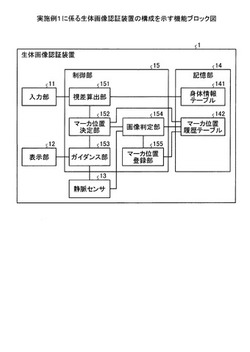
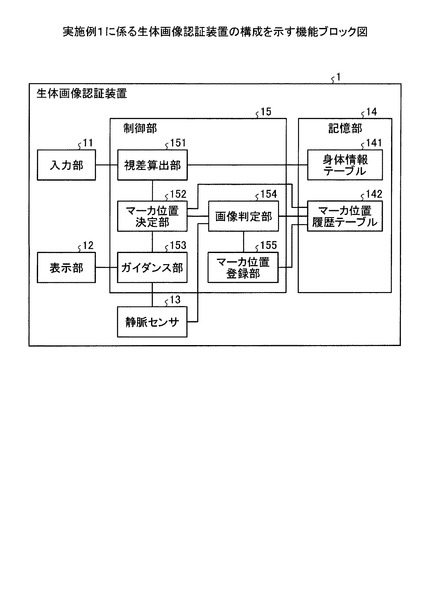
図1は、実施例1に係る生体画像認証装置の構成を示す機能ブロック図である。図1に示すように、生体画像認証装置1は、入力部11と、表示部12と、静脈センサ13と、記憶部14と、制御部15とを有する。
【0014】
入力部11は、ユーザが各種の情報を生体画像認証装置1に入力するための入力装置である。例えば、入力部11は、キーボード、マウスに対応する。表示部12は、各種の情報を表示する表示装置である。例えば、表示部12は、ディスプレイに対応する。
【0015】
静脈センサ13は、手に関する生体情報を非接触で読み取る。実施例では、静脈センサ13は、手のひらの静脈パターンを非接触で読み取るセンサとする。静脈センサ13は、例えば、入力部11の手前側、すなわち利用者側のパームレストの部分に実装される。静脈センサ13は、近赤外線を手のひらに向けて発光し、手のひらから反射した近赤外線を受信し、受信した近赤外線の強弱で手のひらの静脈の位置を認識し、静脈パターンを読み取る。
【0016】
記憶部14は、身体情報テーブル141およびマーカ位置履歴テーブル142を記憶する。記憶部14は、例えば、RAM(Random Access Memory)、ROM(Read Only Memory)、フラッシュメモリ(Flash Memory)などの半導体メモリ素子、またはハードディスク、光ディスクなどの記憶装置に対応する。
【0017】
身体情報テーブル141は、後述する視差の算出の際にパラメータとして用いられる身体情報である。実施例では、身体情報テーブル141は、目線の高さおよび肘から手のひらの中心までの距離などの身体情報を身長に対応付けて記憶する。これは、目線の高さおよび腕の長さは、身長に応じて変わると推定されるからである。すなわち、身長が高くなるにつれて、目線の高さが高くなり、腕の長さが長くなり、身長が低くなるにつれて、目線の高さが低くなり、腕の長さが短くなる。
【0018】
マーカ位置履歴テーブル142は、視差に基づき決定されるマーカの位置を履歴として記憶する履歴情報である。なお、身体情報テーブル141およびマーカ位置履歴テーブル142のデータ構造については、後述する。
【0019】
制御部15は、視差算出部151、マーカ位置決定部152、ガイダンス部153、画像判定部154およびマーカ位置登録部155を有する。制御部15は、例えば、ASIC(Application Specific Integrated Circuit)や、FPGA(Field Programmable Gate Array)などの集積装置に対応する。また、制御部15は、例えば、CPUやMPU(Micro Processing Unit)などの電子回路に対応する。
【0020】
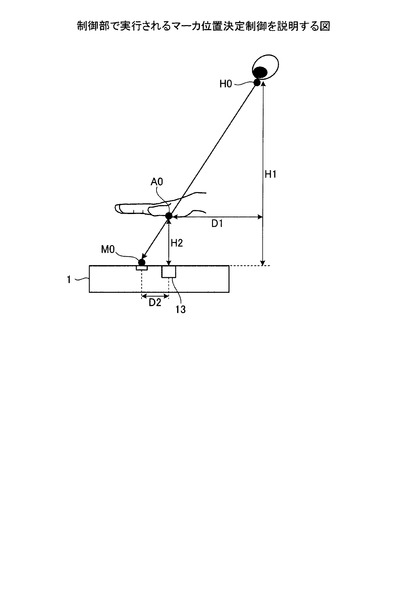
制御部15は、静脈センサ13上の適正な位置に手のひらをかざせるように、位置合わせの目印となるマーカの位置を決定する。ここで、制御部15で実行されるマーカ位置を決定する制御について、図2を参照して説明する。
【0021】
図2は、制御部で実行されるマーカ位置決定制御を説明する図である。図2に示すように、利用者は、静脈センサ13の斜め上から、手のひらを非接触で静脈センサ13上にかざす。制御部15は、利用者の目線の位置H0と、静脈センサ13上の手のひら中心の適正な位置A0と、マーカM0とが一直線に並ぶように、位置合わせ用のマーカM0の位置を決定する。すなわち、利用者は、視差の影響で手を手前側にかざしがちになる。そこで、制御部15は、位置合わせ用のマーカM0を視差(ここでは、D2)分だけ後方(奥側)にずらした位置に決定する。これにより、制御部15は、決定した位置の位置合わせ用のマーカM0を目印として、利用者に手のひらの中心を合わせるように導くことができる。この結果、利用者は、位置合わせ用のマーカM0に手のひらの中心を合わせるようにすることで、手のひらの中心を静脈センサ13上の適正な位置にかざすことができ、静脈認証の失敗を減らすことができる。なお、視差を算出するパラメータとして、利用者の目線の高さH1と、静脈センサ13から手のひらまでの垂直距離H2と、静脈センサ13から利用者までの水平距離D1とが用いられる。
【0022】
図1に戻って、視差算出部151は、静脈センサ13を斜めに見下ろした場合の利用者の目線の高さと、静脈センサ13から利用者までの水平距離と、静脈センサ13から当該静脈センサ13上にかざす手のひらまでの垂直距離とから視差を算出する。例えば、視差算出部151は、身体情報テーブル141に記憶された身体情報に基づき、利用者の身長に対応付けられた目線の高さおよび肘から手のひらの中心までの距離を読み出す。そして、視差算出部151は、読み出した目線の高さおよび肘から手のひらの中心までの距離と、静脈センサ13から静脈センサ13上にかざす手までの垂直距離とから視差を算出する。
【0023】
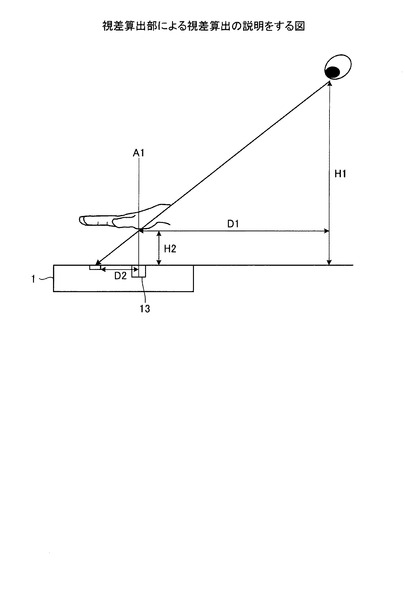
ここで、視差算出部151による視差を算出する方法について説明する。図3は、視差算出部による視差算出の説明をする図である。図3では、静脈センサ13が生体画像認証装置1のパームレストの部分に実装されているものとする。また、図3では、視差算出部151が、図2で示した、利用者の目線の高さH1と静脈センサ13から手のひらまでの垂直距離H2と静脈センサ13から利用者までの水平距離D1とを用いて、視差D2を算出するものとする。
【0024】
図3に示すように、視差算出部151は、相似三角形の計算を利用して、以下の式(1)を導出する。
H2/D2=H1/(D1+D2)・・・・・・・・・・(1)
したがって、視差算出部151は、視差D2を以下の式(2)を用いて算出する。
D2=H2×D1/(H1−H2)・・・・・・・・・・・・・・・(2)
【0025】
図1に戻って、静脈センサ13から静脈センサ13上にかざす手までの垂直距離は、一例として、利用者が静脈センサ13上に手をかざす際の平均的な距離として記憶部14に保持される。そして、視差算出部151は、記憶部14に保持された垂直距離の値を読み出して利用する。また、別の例では、静脈センサ13が、生体画像認証要求がされた際に、利用者によって静脈センサ13上にかざされた手までの位置を読み取り、読み取った位置までの垂直距離を視差算出部151に通知しても良い。
【0026】
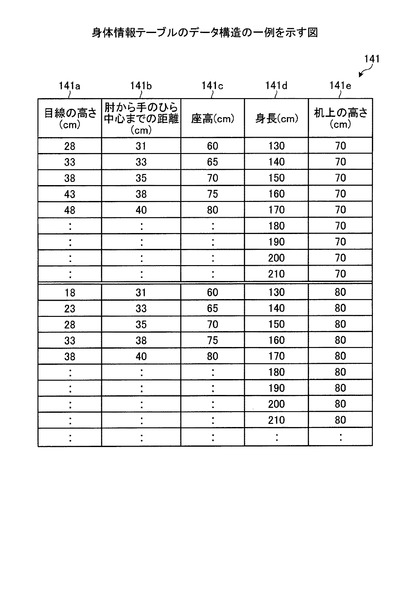
ここで、身体情報テーブル141のデータ構造について、図4を参照して説明する。図4は、身体情報テーブルのデータ構造の一例を示す図である。図4に示すように、身体情報テーブル141は、目線の高さ141a、肘から手のひら中心までの距離141bおよび座高141cを、身長141dおよび机上の高さ141eに対応付けて記憶する。目線の高さ141aは、利用者が生体画像認証装置1を通常使用し得る体勢における、生体画像認証装置1が置かれた机上からの目線の高さを示し、身長および机上の高さに対して平均的な目線の高さを示す。肘から手のひら中心までの距離141bは、利用者が生体画像認証装置1を通常使用し得る体勢における肘から手のひら中心までの距離を示し、身長および机上の高さに対して平均的な距離を示す。座高141cは、身長に対する平均的な座高を示す。身長141dは、身長を示す。机上の高さ141eは、生体画像認証装置1を置く可能性のある机の高さを示す。
【0027】
例えば、身体情報テーブル141は、社団法人人間生活工学研究センターによる「日本人の人体計測データベース1992−1994」を利用して作成できる。一例として、身長141dが「170cm」、机上の高さ141eが「70cm」である場合、目線の高さ141aとして「48cm」と記憶する。そして、肘から手のひら中心までの距離141bとして「40cm」、座高141cとして「80cm」と記憶する。そして、このような身体情報を持つ利用者に関し、視差算出部151は、静脈センサ13から静脈センサ13上にかざす手までの垂直距離を「5cm」とすると、数式(2)に当てはめて、視差を4.65cmと算出する。
【0028】
図1に戻って、マーカ位置決定部152は、視差算出部151によって算出された視差に基づき、利用者の目の位置と静脈センサ13上にかざす手の位置との延長線上であって静脈センサ13が取り付けられた水平面上にマーカの位置を決定する。例えば、マーカ位置決定部152は、静脈センサ13の中心から視差算出部151によって算出された視差分だけ利用者より遠い位置にマーカの位置を決定する。一例として、マーカ位置決定部152は、あらかじめ段階的に複数の位置に配置されたマーカの中から、静脈センサ13の中心から視差分だけ利用者より遠い位置にあるマーカを決定する。すなわち、生体画像認証装置1は、想定されるいくつかの目線の高さに応じたマーカをあらかじめ複数配置し、これらマーカのうち、静脈センサ13の中心から視差分だけ利用者より遠い位置に配置されたマーカを決定する。なお、マーカは、発光ダイオード(LED:Light Emitting Diode)を一例とするが、これに限定されるものではない。LEDの場合には、マーカ位置決定部152は、決定したマーカを点灯させれば良い。
【0029】
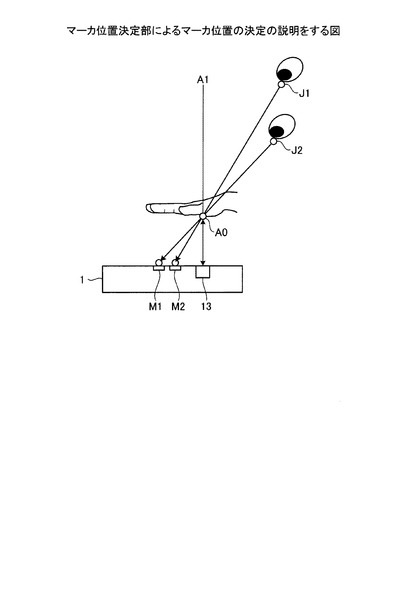
ここで、マーカ位置決定部152によるマーカを決定する方法について説明する。図5は、マーカ位置決定部によるマーカ位置の決定の説明をする図である。図5に示すように、マーカ位置決定部152は、利用者の目の各位置J1、J2と静脈センサ13上にかざす手の位置A0との延長線上であって静脈センサ13が取り付けられた水平面上にマーカの位置を決定する。図5では、身長が高い利用者の目線の高さをJ1とし、身長が低い利用者の目線の高さをJ2とするものとする。身長が高い利用者の場合、目線の高さJ1は身長が低い利用者の目線の高さJ2より高くなる。このため、マーカ位置決定部152は、目の位置J1と手の位置A0との延長線上に配置された、静脈センサ13に近いマーカM2を決定する。一方、身長が低い利用者の場合、目線の高さJ2は身長が高い利用者の目線の高さJ1より低くなる。このため、マーカ位置決定部152は、目の位置J2と手の位置A0との延長線上に配置された、静脈センサ13に遠いマーカM1を決定する。
【0030】
図1に戻って、ガイダンス部153は、マーカ位置決定部152によって決定された位置のマーカに手のひらの中心を合わせるように指示する。例えば、マーカがLEDである場合、ガイダンス部153は、音声ガイダンスのアプリケーションにより、点灯しているマーカに手のひらの中心を合わせるように、音声でガイダンスする。別の例では、マーカがLEDである場合、ガイダンス部153は、点灯しているマーカに手のひらの中心を合わせるように、表示部12に表示する。
【0031】
画像判定部154は、静脈センサ13から手のひらの静脈の画像を取得し、取得した画像が適正位置で撮像された画像であるか否かを判定する。例えば、画像判定部154は、ガイダンス部153によってガイダンスされた後、静脈センサ13によって読み取られた手のひらの静脈の画像の中心と手のひらの中心との距離が所定範囲内であるか否かを判定する。そして、画像判定部154は、所定範囲内であれば、適正位置で撮像された画像であると判断する。一方、画像判定部154は、所定範囲外であれば、適正位置で撮像された画像でないと判断する。
【0032】
一例として、画像判定部154は、静脈センサ13によって読み取られた手のひらの静脈の画像の中心点を静脈センサ13の中心点とする。また、画像判定部154は、同じ画像の中心点に一番近いところにある指間の付け根から所定値だけ下側の点を手のひらの中心点と推定する。そして、画像判定部154は、静脈センサ13の中心点と手のひらの中心点との距離が所定範囲内であるか否かを判定する。
【0033】
また、画像判定部154は、静脈センサ13から取得した画像が適正位置で撮像された画像であると判定した場合、ガイダンス部153によってガイダンスされたマーカの位置を登録するようにマーカ位置登録部155に指示する。また、画像判定部154は、静脈センサ13から取得した画像が適正位置で撮像された画像でないと判定した場合、マーカの位置を再び決定するようにマーカ位置決定部152に指示する。
【0034】
マーカ位置登録部155は、ガイダンス部153によってガイダンスされたマーカの位置を利用者の識別情報と対応付けて登録する。例えば、マーカ位置登録部155は、ガイダンス部153によってガイダンスされたマーカの位置とともに、利用者の身長と生体情報とを利用者の識別情報に対応付けてマーカ位置履歴テーブル142に登録する。
【0035】
ある利用者におけるマーカの位置がマーカ位置履歴テーブル142に登録された場合、マーカ位置決定部152は、当該利用者における次回のマーカの位置を、マーカ位置履歴テーブル142を利用して決定することができる。すなわち、マーカ位置決定部152は、視差算出部151による視差の算出によらないで、マーカ位置履歴テーブル142に記憶されたマーカ位置142cを用いてマーカの位置を決定する。
【0036】
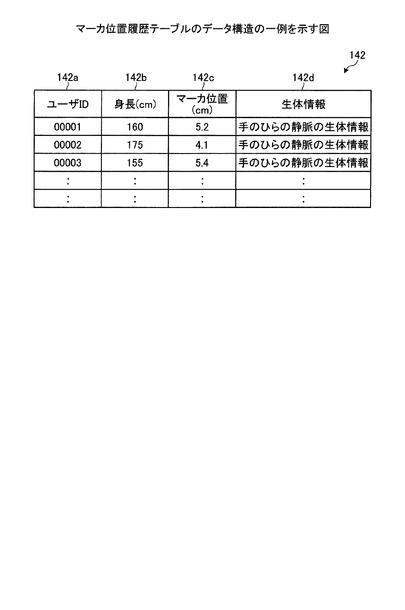
ここで、マーカの位置を登録するマーカ位置履歴テーブル142のデータ構造について、図6を参照して説明する。図6は、マーカ位置履歴テーブルのデータ構造を示す図である。図6に示すように、マーカ位置履歴テーブル142は、ユーザID142a、身長142b、マーカ位置142cおよび生体情報142dを対応付けて記憶する。ユーザID142aは、利用者の識別情報を示す。身長142bは、利用者の身長を示す。マーカ位置142cは、利用者のマーカの位置を示す。生体情報142dは、利用者の生体情報を示す。一例として、ユーザID142aが「00001」である場合、身長142bとして「160cm」、マーカ位置142cとして「5.2cm」、生体情報142dとして「手のひらの静脈の生体情報」を記憶する。
【0037】
次に、実施例1に係るマーカ位置決定制御の処理手順を、図7および図8を参照して説明する。図7は、マーカ位置決定制御(静脈登録時)の処理手順を示すフローチャートであり、図8は、マーカ位置決定制御(照合時)の処理手順を示すフローチャートである。なお、以下の説明では、マーカとして、想定されるいくつかの目線の高さに応じたLED(マーカLED)を、あらかじめ複数配置されているものとする。
【0038】
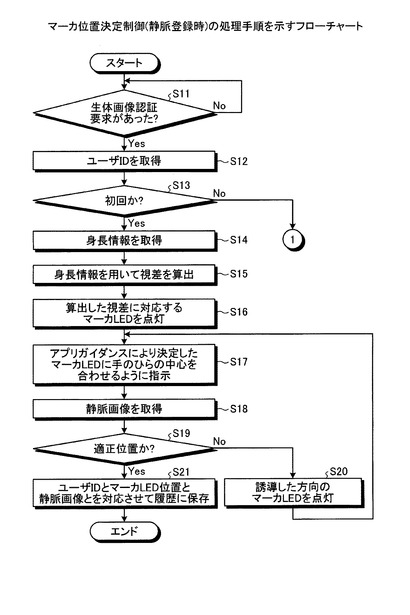
[実施例1に係るマーカ位置決定制御(静脈登録時)の処理手順]
まず、視差算出部151は、利用者から生体画像認証要求があったか否かを判定する(ステップS11)。生体画像認証要求がなかったと判定した場合(ステップS11;No)、視差算出部151は、利用者から生体画像認証要求があったと判定するまで、判定処理を繰り返す。一方、生体画像認証要求があったと判定した場合(ステップS11;Yes)、視差算出部151は、入力部11を介して、利用者からユーザIDを取得する(ステップS12)。
【0039】
そして、視差算出部151は、取得したユーザIDに関し、初回の制御であるか否かを判定する(ステップS13)。例えば、視差算出部151は、取得したユーザIDに対応付けられたマーカ位置がマーカ位置履歴テーブル142に記憶されているか否かで判定する。そして、取得したユーザIDに関し、初回の制御でない場合は(ステップS13;No)、視差算出部151は、照合時の制御であると判断し、照合時のマーカ位置決定制御に移行すべく、ステップS31に移行する。
【0040】
一方、取得したユーザIDに関し、初回の制御である場合は(ステップS13;Yes)、視差算出部151は、静脈登録時の制御であると判断し、入力部11を介して、利用者から身長情報を取得する(ステップS14)。
【0041】
続いて、視差算出部151は、身長情報を用いて視差を算出する(ステップS15)。例えば、視差算出部151は、身体情報テーブル141に記憶された身体情報に基づき、利用者の身長情報に対応付けられた目線の高さ141aおよび肘から手のひら中心までの距離141bを読み出す。そして、視差算出部151は、読み出した目線の高さおよび肘から手のひら中心までの距離と、静脈センサ13から静脈センサ13上にかざす手までの垂直距離とから視差を算出する。
【0042】
そして、マーカ位置決定部152は、算出した視差に対応するマーカLEDを点灯する(ステップS16)。例えば、マーカ位置決定部152は、静脈センサ13の中心から視差算出部151によって算出された視差分だけ利用者より遠い位置のマーカLEDを点灯する。すなわち、マーカ位置決定部152は、視差に基づき、利用者の目の位置と静脈センサ13上にかざす手の位置との延長線上であって静脈センサ13が取り付けられた水平面上のマーカLEDを点灯する。
【0043】
続いて、ガイダンス部153は、アプリケーションを用いたガイダンスにより、決定したマーカLEDに手のひらの中心を合わせるように指示する(ステップS17)。例えば、ガイダンス部153は、音声ガイダンスのアプリケーションにより、点灯しているマーカLEDに手のひらの中心を合わせるように、音声でガイダンスする。
【0044】
その後、画像判定部154は、静脈センサ13から手のひらの静脈の画像を取得する(ステップS18)。そして、画像判定部154は、取得した画像が適正位置で撮像された画像であるか否かを判定する(ステップS19)。取得した画像が適正位置で撮像された画像でないと判定した場合(ステップS19;No)、画像判定部154は、マーカLEDの位置を再び決定するようにマーカ位置決定部152に指示する。そして、マーカ位置決定部152は、誘導した方向のマーカLEDを点灯し(ステップS20)、ステップS17に移行する。
【0045】
一方、取得した画像が適正位置で撮像された画像であると判定した場合(ステップS19;Yes)、マーカ位置登録部155は、ユーザIDとマーカLEDの位置と静脈画像とを対応させてマーカ位置履歴テーブル142に保存する(ステップS21)。そして、マーカ位置決定制御が終了する。
【0046】
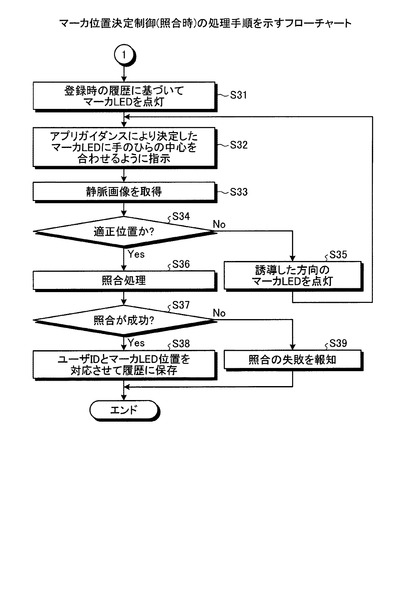
[実施例1に係るマーカ位置決定制御(照合時)の処理手順]
照合時のマーカ位置決定制御では、マーカ位置決定部152は、静脈登録時のマーカ位置履歴テーブル142に記憶された履歴に基づいて、ユーザIDに対応付けられたマーカ位置のマーカLEDを点灯する(ステップS31)。
【0047】
続いて、ガイダンス部153は、アプリケーションを用いたガイダンスにより、決定したマーカLEDに手のひらの中心を合わせるように指示する(ステップS32)。例えば、ガイダンス部153は、音声ガイダンスのアプリケーションにより、点灯しているマーカLEDに手のひら中心を合わせるように、音声でガイダンスする。
【0048】
その後、画像判定部154は、静脈センサ13から手のひらの静脈の画像を取得する(ステップS33)。そして、画像判定部154は、取得した画像が適正位置で撮像された画像であるか否かを判定する(ステップS34)。取得した画像が適正位置で撮像された画像でないと判定した場合(ステップS34;No)、画像判定部154は、マーカLEDの位置を再び決定するようにマーカ位置決定部152に指示する。そして、マーカ位置決定部152は、誘導した方向のマーカLEDを点灯し(ステップS35)、ステップS32に移行する。
【0049】
一方、取得した画像が適正位置で撮像された画像であると判定した場合(ステップS34;Yes)、画像判定部154は、取得した画像とマーカ位置履歴テーブル142のユーザIDに対応する生体情報142dとを照合して認証を行う(ステップS36)。照合が成功した場合(ステップS37;Yes)、マーカ位置登録部155は、ユーザIDとマーカLEDの位置とを対応させてマーカ位置履歴テーブル142に保存する(ステップS38)。そして、マーカ位置決定制御が終了する。
【0050】
一方、照合が失敗した場合(ステップS37;No)、画像判定部154は、照合の失敗を、例えば表示部12に表示させて報知する(ステップS39)。そして、マーカ位置決定制御が終了する。
【0051】
[実施例1の効果]
上記実施例1によれば、生体画像認証装置1は、静脈センサ13を斜めに見下ろした場合の利用者の目線の高さと、静脈センサ13から利用者までの水平距離と、静脈センサ13から当該静脈センサ13上にかざす手までの垂直距離とから視差を算出する。そして、生体画像認証装置1は、算出された視差に基づき、利用者の目の位置と静脈センサ13上にかざす手の位置との延長線上であって静脈センサ13が取り付けられた水平面上にマーカの位置を決定する。そして、生体画像認証装置1は、決定された位置のマーカに、手のひらの中心を合わせるように指示する。かかる構成によれば、生体画像認証装置1は、利用者の手のひらを、静脈センサ13が読み取るのに適した位置に合わせることができる。この結果、生体画像認証装置1は、静脈センサ13上を斜めに見下ろした場合に手のひらを静脈センサ13上の適した位置より手前にかざしてしまうことに起因する、静脈センサ13で読み取る手のひら領域の欠損を防ぐことができる。これにより、生体画像認証装置1は、本人認証の正解率の向上を図ることができる。
【0052】
また、上記実施例1によれば、生体画像認証装置1は、目線の高さおよび手のひらの中心から肘までの水平距離を含む身体情報を身長に対応付けて記憶する身体情報テーブル141を有する。そして、生体画像認証装置1は、身体情報テーブル141に記憶された身体情報に基づき、利用者の身長に対応付けられた目線の高さと手のひらの中心から肘までの水平距離と、当該静脈センサ13上にかざす手までの垂直距離とから視差を算出する。かかる構成によれば、生体画像認証装置1は、身体情報テーブル141に身長に対応付けられた目線の高さおよび手のひらの中心から肘までの水平距離を記憶するので、記憶した情報を用いて容易に視差を算出できる。
【0053】
また、上記実施例1によれば、生体画像認証装置1は、あらかじめ段階的な複数の位置にマーカとして配置されたLEDの中から、決定した位置に対応するLEDを点灯する。かかる構成によれば、生体画像認証装置1は、利用者に対して点灯するLEDを目印とさせることにより、利用者の手のひらを、静脈センサ13が読み取るのに適した位置に合わせやすくすることができる。
【0054】
また、上記実施例1によれば、生体画像認証装置1は、静脈センサ13が静脈パターンを読み取った画像について、当該画像の中心と手のひらの中心との距離が所定範囲内である場合、指示されたマーカの位置を利用者の識別情報と対応付けて記憶する。そして、生体画像認証装置1は、利用者におけるマーカの位置が記憶されている場合、次回の利用者におけるマーカの位置に、視差の算出に代えて、記憶されたマーカの位置を用いるようにした。かかる構成によれば、生体画像認証装置1は、次回の利用者におけるマーカの位置に、記憶されたマーカの位置を利用することで、処理の効率化を図ることができる。
【実施例2】
【0055】
ところで、実施例1では、視差を算出するために用いられるパラメータである目線の高さおよび静脈センサ13から利用者までの水平距離を身長に対応付けて身体情報テーブル141に記憶するようにした。そして、生体画像認証装置1は、身体情報テーブル141に記憶された身体情報から利用者の身長に対応付けた目線の高さと静脈センサ13から利用者までの水平距離とを取得し、取得した情報を用いて視差を算出する場合を説明した。しかしながら、生体画像認証装置1は、これに限定されず、カメラを用いて、視差を算出するために用いられるパラメータである目線の高さおよび静脈センサ13から利用者までの水平距離を解析し、解析した情報を用いて視差を算出しても良い。
【0056】
そこで、実施例2では、生体画像認証装置2が、カメラを用いて、視差を算出するために用いられるパラメータである目線の高さおよび静脈センサ13から利用者までの水平距離を解析し、解析した情報を用いて視差を算出する場合を説明する。
【0057】
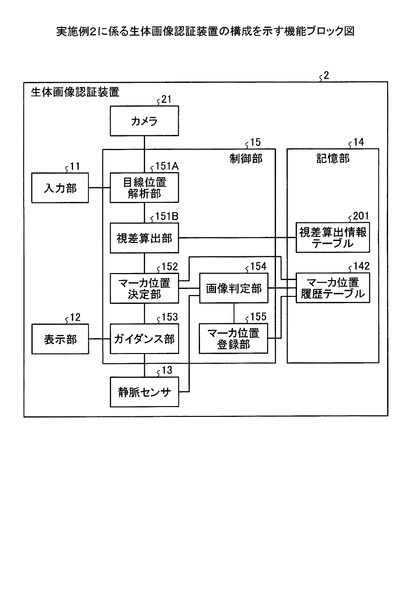
[実施例2に係る生体画像認証装置の構成]
図9は、実施例2に係る生体画像認証装置の構成を示す機能ブロック図である。なお、図1に示す生体画像認証装置1と同一の構成については同一符号を示すことで、その重複する構成および動作の説明については省略する。実施例1と実施例2とが異なるところは、カメラ21を追加した点にある。また、実施例1と実施例2とが異なるところは、制御部15に目線位置解析部151Aを追加し、視差算出部151Bを変更した点にある。また、実施例1と実施例2とが異なるところは、身体情報テーブル141を削除し、視差算出情報テーブル201を新たに追加した点にある。
【0058】
カメラ21は、利用者の顔画像を撮像する。カメラ21は、生体画像認証装置2がノートPC(Personal Computer)である場合、ノートPCに搭載されるWebカメラを一例とする。カメラ21は、例えば、表示部12の顔の画像が撮像できる部分に実装される。
【0059】
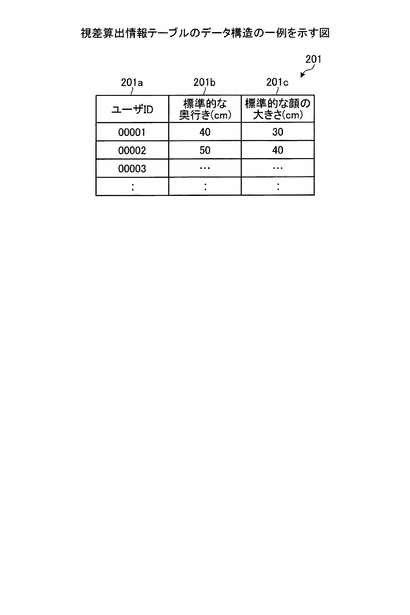
視差算出情報テーブル201は、視差の算出の際に用いられる情報である。すなわち、視差算出情報テーブル201は、視差を算出するために用いられるパラメータの1つである静脈センサ13から利用者までの水平距離を算出するための情報である。ここで、視差算出情報テーブル201のデータ構造について、図10を参照して説明する。図10は、視差算出情報テーブルのデータ構造の一例を示す図である。図10に示すように、視差算出情報テーブル201は、ユーザID201a、標準的な奥行き201bおよび標準的な顔の大きさ201cを対応付けて記憶する。ユーザID201aは、利用者の識別情報を示す。標準的な奥行き201bは、利用者が生体画像認証装置2を通常使用し得る標準的な体勢での利用者の位置から静脈センサ13までの奥行き(水平距離)を示す。標準的な顔の大きさ201cは、利用者が生体画像認証装置2を通常使用し得る標準的な体勢でのカメラ21から撮像される利用者の顔の大きさを示す。顔の大きさの一例として、頭頂部からあごまでの長さとする。
【0060】
なお、標準的な奥行き201bおよび標準的な顔の大きさ201cは、利用者が生体認証を開始するまでにカメラ21を利用してあらかじめ設定される。ここで、カメラ21の撮像位置が、標準的な奥行き201bなどをあらかじめ設定する時と、実際に生体認証を行う時とで異なる場合がある。例えば、生体画像認証装置2がノートPCであり、ノートPCのモニタの上部にカメラ21が実装されているとすると、これら2つの時のモニタの画角が異なる場合が考えられる。しかしながら、ノートPCのモニタの画角は、利用者が通常使用し得る標準的な体勢から見て大きく異ならないものである。そこで、ここでは、利用者が通常使用し得る標準的な体勢で使用することを条件に、ノートPCのモニタの画角が使用時で若干違っていたとしても誤差の範囲内であるとしてその違いを考慮しないものとする。
【0061】
目線位置解析部151Aは、生体認証の際、カメラ21によって撮像された利用者の顔画像から、生体認証時の体勢での利用者の目線の高さと静脈センサ13から利用者までの奥行き(水平距離)とを解析する。例えば、目線位置解析部151Aは、カメラ21によって撮像された利用者の顔画像から目を認識し、認識した目の位置から目線の高さを解析する。また、目線位置解析部151Aは、撮像された顔画像から顔の大きさを解析する。また、目線位置解析部151Aは、解析した顔の大きさの標準的な顔の大きさに対する比率を算出する。すなわち、目線位置解析部151Aは、生体認証時の体勢での顔の大きさと標準的な体勢での顔の大きさとを比較して、生体認証時の体勢が標準的な体勢と比べカメラ21に対して近い距離にあるか遠い距離にあるかを算出する。目線位置解析部151Aは、この算出結果を用いて、生体認証時の体勢における奥行きを算出する。一例として、目線位置解析部151Aは、視差算出情報テーブル201に基づいて、利用者に対応する標準的な顔の大きさ201cを読み出し、読み出した標準的な顔の大きさを、解析した顔の大きさで割算し、顔の大きさの比率を算出する。そして、目線位置解析部151Aは、算出した顔の大きさの比率を、視差算出情報テーブル201に記憶された利用者に対応する標準的な奥行き201bに乗じ、静脈センサ13から撮像された利用者までの奥行き(水平距離)を解析する。
【0062】
視差算出部151Bは、静脈センサ13を斜めに見下ろした場合の利用者の目線の高さと、静脈センサ13から利用者までの水平距離と、静脈センサ13から当該静脈センサ13上にかざす手のひらまでの垂直距離とから視差を算出する。例えば、視差算出部151Bは、目線位置解析部151Aから目線の高さおよび静脈センサ13から利用者までの水平距離を取得し、取得した情報と、静脈センサ13から静脈センサ13上にかざす手までの垂直距離とから視差を算出する。つまり、視差算出部151Bは、視差を相似三角形の計算を利用して算出する。
【0063】
静脈センサ13から静脈センサ13上にかざす手までの垂直距離は、一例として、利用者が静脈センサ13上に手をかざす際の平均的な距離として記憶部14に保持される。そして、視差算出部151Bは、記憶部14に保持された垂直距離の値を読み出して利用する。また、別の例では、静脈センサ13が、生体画像認証要求がされた際に、利用者によって静脈センサ13上にかざされた手までの位置を読み取り、読み取った位置までの垂直距離を視差算出部151Bに通知しても良い。
【0064】
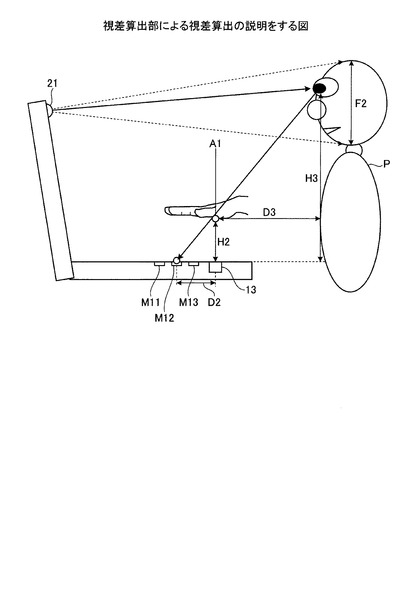
ここで、視差算出部151Bによる視差を算出する方法について説明する。図11は、視差算出部による視差算出の説明をする図である。図11では、生体画像認証装置2がノートPCであるものとして説明する。図11では、静脈センサ13が生体画像認証装置2のパームレストの部分に実装されているものとする。また、図11では、生体画像認証装置2にカメラ21が搭載されているものとする。
【0065】
まず、視差算出部151Bは、利用者Pの目線の高さH3および静脈センサ13から利用者Pまでの水平距離D3を、目線位置解析部151Aから取得する。利用者Pの目線の高さH3および静脈センサ13から利用者Pまでの水平距離D3は、目線位置解析部151Aによって以下のように算出される。
【0066】
目線位置解析部151Aは、カメラ21によって撮像された利用者Pの顔画像から目を認識し、認識した目の位置から目線の高さH3を解析する。また、目線位置解析部151Aは、撮像された顔画像から顔の大きさF2を算出し、視差算出情報テーブル201にあらかじめ記憶された利用者Pの標準的な顔の大きさ201cに対する顔の大きさF2の比率を算出する。そして、目線位置解析部151Aは、算出した比率を、視差算出情報テーブル201にあらかじめ記憶された利用者Pに対応する標準的な奥行き201bに乗じ、静脈センサ13から利用者Pまでの奥行きD3を算出する。
【0067】
そして、視差算出部151Bは、目線位置解析部151Aによって算出された目線の高さH3および奥行き(水平距離)D3を取得する。そして、視差算出部151Bは、取得した目線の高さH3と、奥行き(水平距離)D3と、静脈センサ13から当該静脈センサ13上にかざす手のひらまでの垂直距離H2とから利用者Pの視差D2を算出する。なお、視差D2を算出する方法については、図3を参照して説明したので、その説明を省略する。そして、視差算出部151Bによって算出された視差D2に基づき、マーカ位置決定部152は、利用者Pの目の位置と静脈センサ13上にかざす手のひらの位置との延長線上であって静脈センサ13が取り付けられた水平面上にマーカの位置を決定する。ここでは、マーカ位置決定部152は、複数のマーカM11、M12、M13のうち、視差D2に基づいて、マーカM12の位置を決定する。
【0068】
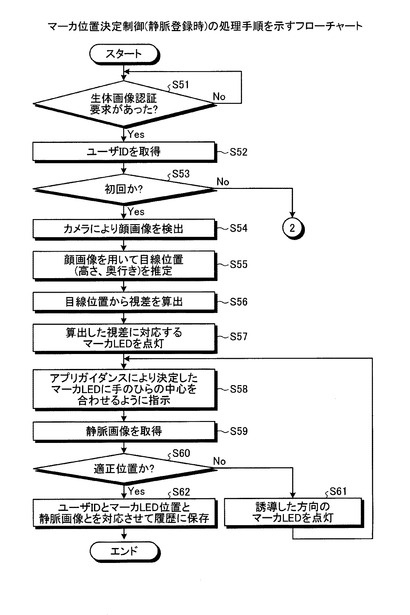
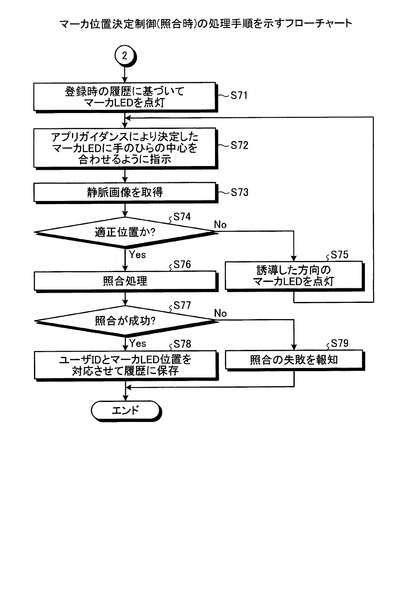
次に、実施例2に係るマーカ位置決定制御の処理手順を、図12および図13を参照して説明する。図12は、マーカ位置決定制御(静脈登録時)の処理手順を示すフローチャートであり、図13は、マーカ位置決定制御(照合時)の処理手順を示すフローチャートである。なお、以下の説明では、マーカとして、想定されるいくつかの目線の高さに応じたLED(マーカLED)を、あらかじめ複数配置されているものとする。
【0069】
[実施例2に係るマーカ位置決定制御(静脈登録時)の処理手順]
まず、目線位置解析部151Aは、利用者から生体画像認証要求があったか否かを判定する(ステップS51)。生体画像認証要求がなかったと判定した場合(ステップS51;No)、目線位置解析部151Aは、利用者から生体画像認証要求があったと判定するまで、判定処理を繰り返す。一方、生体画像認証要求があったと判定した場合(ステップS51;Yes)、目線位置解析部151Aは、入力部11を介して、利用者からユーザIDを取得する(ステップS52)。
【0070】
そして、目線位置解析部151Aは、取得したユーザIDに関し、初回の制御であるか否かを判定する(ステップS53)。例えば、目線位置解析視部151Aは、取得したユーザIDに対応付けられたマーカ位置がマーカ位置履歴テーブル142に記憶されているか否かで判定する。そして、取得したユーザIDに関し、初回の制御でない場合は(ステップS53;No)、目線位置解析部151Aは、照合時の制御であると判断し、照合時のマーカ位置決定制御に移行すべく、ステップS71に移行する。
【0071】
一方、取得したユーザIDに関し、初回の制御である場合は(ステップS53;Yes)、目線位置解析部151Aは、静脈登録時の制御であると判断し、カメラ21により顔画像を検出する(ステップS54)。
【0072】
そして、目線位置解析部151Aは、検出した顔画像を用いて目線位置(高さ、奥行き)を推定する(ステップS55)。すなわち、目線位置解析部151Aは、顔画像から目を認識し、認識した目の位置から利用者の目線の高さを推定する。また、目線位置解析部151Aは、顔画像から顔の大きさを解析し、解析した顔の大きさと利用者の標準的な顔の大きさとから比率を算出し、算出した比率を、利用者の標準的な奥行きに乗じ、静脈センサ13から利用者までの奥行き(水平距離)を推定する。標準的な顔の大きさおよび標準的な奥行きは利用者毎にあらかじめ視差算出情報テーブル201に記憶されている。
【0073】
続いて、視差算出部151Bは、推定した目線位置から視差を算出する(ステップS56)。すなわち、視差算出部151Bは、目線位置解析部151Aから目線位置として推定された目線の高さおよび静脈センサ13から利用者までの奥行き(水平距離)を取得する。そして、視差算出部151Bは、取得した情報と、静脈センサ13から静脈センサ13上にかざす手までの垂直距離とから視差を算出する。
【0074】
そして、マーカ位置決定部152は、算出した視差に対応するマーカLEDを点灯する(ステップS57)。例えば、マーカ位置決定部152は、静脈センサ13の中心から視差算出部151Bによって算出された視差分だけ利用者より遠い位置のマーカLEDを点灯する。すなわち、マーカ位置決定部152は、視差に基づき、利用者の目の位置と静脈センサ13上にかざす手の位置との延長線上にマーカLEDを点灯する。
【0075】
続いて、ガイダンス部153は、アプリケーションを用いたガイダンスにより、決定したマーカLEDに手のひらの中心を合わせるように指示する(ステップS58)。例えば、ガイダンス部153は、音声ガイダンスのアプリケーションにより、点灯しているマーカLEDに手のひら中心を合わせるように、音声でガイダンスする。
【0076】
その後、画像判定部154は、静脈センサ13から手のひらの静脈の画像を取得する(ステップS59)。そして、画像判定部154は、取得した画像が適正位置で撮像された画像であるか否かを判定する(ステップS60)。取得した画像が適正位置で撮像された画像でないと判定した場合(ステップS60;No)、画像判定部154は、マーカLEDの位置を再び決定するようにマーカ位置決定部152に指示する。そして、マーカ位置決定部152は、誘導した方向のマーカLEDを点灯し(ステップS61)、ステップS58に移行する。
【0077】
一方、取得した画像が適正位置で撮像された画像であると判定した場合(ステップS60;Yes)、マーカ位置登録部155は、ユーザIDとマーカLEDの位置と静脈画像とを対応させてマーカ位置履歴テーブル142に保存する(ステップS62)。そして、マーカ位置決定制御が終了する。
【0078】
[実施例2に係るマーカ位置決定制御(照合時)の処理手順]
照合時のマーカ位置決定制御では、マーカ位置決定部152は、静脈登録時のマーカ位置履歴テーブル142に記憶された履歴に基づいて、ユーザIDに対応付けられたマーカ位置のマーカLEDを点灯する(ステップS71)。
【0079】
続いて、ガイダンス部153は、アプリケーションを用いたガイダンスにより、決定したマーカLEDに手のひらの中心を合わせるように指示する(ステップS72)。
【0080】
その後、画像判定部154は、静脈センサ13から手のひらの静脈の画像を取得する(ステップS73)。そして、画像判定部154は、取得した画像が適正位置で撮像された画像であるか否かを判定する(ステップS74)。取得した画像が適正位置で撮像された画像でないと判定した場合(ステップS74;No)、画像判定部154は、マーカLEDの位置を再び決定するようにマーカ位置決定部152に指示する。そして、マーカ位置決定部152は、誘導した方向のマーカLEDを点灯し(ステップS75)、ステップS72に移行する。
【0081】
一方、取得した画像が適正位置で撮像された画像であると判定した場合(ステップ74;Yes)、画像判定部154は、取得した画像とマーカ位置履歴テーブル142のユーザIDに対応する生体情報142dとを照合して認証を行う(ステップS76)。照合が成功した場合(ステップS77;Yes)、マーカ位置登録部155は、ユーザIDとマーカLEDの位置とを対応させてマーカ位置履歴テーブル142に保存する(ステップS78)。そして、マーカ位置決定制御が終了する。
【0082】
一方、照合が失敗した場合(ステップS77;No)、画像判定部154は、照合の失敗を、例えば表示部12に表示させて報知する(ステップS79)。そして、マーカ位置決定制御が終了する。
【0083】
[実施例2の効果]
上記実施例2によれば、生体画像認証装置2は、利用者を撮像するカメラ21を備え、カメラ21によって撮像された顔画像から、利用者の目線の高さと静脈センサ13から利用者までの水平距離とを解析する。そして、生体画像認証装置2は、解析された目線の高さと、解析された水平距離と、静脈センサ13から当該静脈センサ13上にかざす手までの垂直距離とから視差を算出する。そして、生体画像認証装置2は、算出された視差に基づき、利用者の目の位置と静脈センサ13上にかざす手の位置との延長線上であって静脈センサ13が取り付けられた水平面上にマーカの位置を決定する。そして、生体画像認証装置2は、決定された位置のマーカに、手のひらの中心を合わせるように指示する。かかる構成によれば、生体画像認証装置2は、利用者の手のひらを、静脈センサ13が読み取るのに適した位置に合わせることができる。この結果、生体画像認証装置2は、静脈センサ13上を斜めに見下ろした場合に手のひらを静脈センサ13上の適した位置より手前にかざしてしまうことに起因する、静脈センサ13で読み取る手のひら領域の欠損を防ぐことができる。これにより、生体画像認証装置2は、本人認証の正解率の向上を図ることができる。さらに、生体画像認証装置2は、カメラ21によって撮像された顔画像を利用して利用者の目線の高さと静脈センサ13から利用者までの水平距離とを解析するので、解析したこれら情報を用いて視差を精度良く算出できる。
【0084】
なお、視差算出情報テーブル201は、標準的な顔の大きさ201cを、ユーザID201aおよび標準的な奥行き201bと対応付けて記憶するものとして説明した。しかしながら、視差算出情報テーブル201は、標準的な目の間隔を、ユーザID201aおよび標準的な奥行き201bと対応付けて記憶するものとしても良い。標準的な目の間隔は、利用者が生体画像認証装置2を通常使用し得る標準的な体勢での利用者の目の間隔を示す。この場合、目線位置解析部151Aは、撮像された顔画像から目の間隔を解析する。また、目線位置解析部151Aは、視差算出情報テーブル201に基づいて、利用者に対応する標準的な目の間隔を読み出し、読み出した標準的な目の間隔を、解析した目の間隔で割算し、比率を算出する。そして、目線位置解析部151Aは、算出した比率を、視差算出情報テーブル201に記憶された利用者に対応する標準的な奥行き201bに乗じ、静脈センサ13から撮像された利用者までの奥行き(水平距離)を解析すれば良い。
【0085】
また、実施例では、静脈センサ13を手のひらの静脈パターンを読み取るセンサであるものとして説明した。しかしながら、静脈センサ13は、これに限定されるものではなく、手に関する生体情報を読み取るセンサであれば良く、例えば、指の静脈パターンを読み取るセンサであっても、手のひらや指の指紋を読み取るセンサであっても良い。
【0086】
[プログラムなど]
なお、生体画像認証装置1、2は、既知のパーソナルコンピュータ、ワークステーションなどの情報処理装置に、上記した視差算出部151、マーカ位置決定部152、ガイダンス部153などの各機能を搭載することによって実現することができる。
【0087】
また、図示した各装置の各構成要素は、必ずしも物理的に図示の如く構成されていることを要しない。すなわち、各装置の分散・統合の具体的態様は図示のものに限られず、その全部または一部を、各種の負荷や使用状況などに応じて、任意の単位で機能的または物理的に分散・統合して構成することができる。例えば、視差算出部151とマーカ位置決定部152とを1個の部として統合しても良い。一方、マーカ位置決定部152を、静脈登録時にマーカを決定する第1のマーカ位置決定部と照合時にマーカを決定する第2のマーカ位置決定部とに分散しても良い。また、身体情報テーブル141などの記憶部を生体画像認証装置1、2の外部装置としてネットワーク経由で接続するようにしても良い。
【0088】
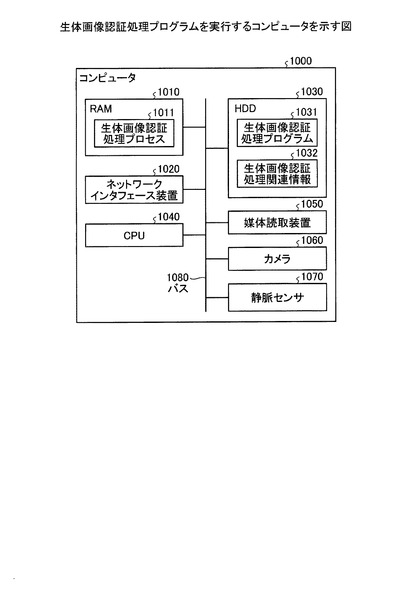
また、上記実施例で説明した各種の処理は、あらかじめ用意されたプログラムをパーソナルコンピュータやワークステーションなどのコンピュータで実行することによって実現することができる。そこで、以下では、図14を用いて、図1に示した生体画像認証装置1の制御部15と同様の機能を有する生体画像認証処理プログラムを実行するコンピュータの一例を説明する。
【0089】
図14は、生体画像認証処理プログラムを実行するコンピュータを示す図である。図14に示すように、コンピュータ1000は、RAM1010と、ネットワークインタフェース装置1020と、HDD1030と、CPU1040、媒体読取装置1050、カメラ1060、静脈センサ1070およびバス1080とを有する。RAM1010、ネットワークインタフェース装置1020、HDD1030、CPU1040、媒体読取装置1050、カメラ1060、静脈センサ1070は、バス1080によって接続されている。
【0090】
そして、HDD1030には、図1に示した制御部15と同様の機能を有する生体画像認証処理プログラム1031が記憶される。また、HDD1030には、図1に示した身体情報テーブル141およびマーカ位置履歴テーブル142に対応する生体画像認証処理関連情報1032が記憶される。
【0091】
そして、CPU1040が生体画像認証処理プログラム1031をHDD1030から読み出してRAM1010に展開することにより、生体画像認証処理プログラム1031は、生体画像認証処理プロセス1011として機能するようになる。そして、生体画像認証処理プロセス1011は、生体画像認証処理関連情報1032から読み出した情報などを適宜RAM1010上の自身に割り当てられた領域に展開し、この展開したデータなどに基づいて各種データ処理を実行する。
【0092】
媒体読取装置1050は、生体画像認証処理プログラム1031がHDD1030に格納されていない場合であっても生体画像認証処理プログラム1031を記憶する媒体などから生体画像認証処理プログラム1031を読み取る。媒体読取装置1050には、例えばCD−ROMや光ディスク装置がある。また、ネットワークインタフェース装置1020は、外部装置とネットワーク経由で接続する装置であり、有線、無線に対応するものである。また、カメラ1060は、利用者の画像を撮影する装置である。また、静脈センサ1070は、手のひらの静脈パターンを非接触で読み取るセンサであり、パームレストの部分に実装される。
【0093】
なお、上記の生体画像認証処理プログラム1031については、必ずしも最初からHDD1030に記憶させておかなくても良い。例えば、コンピュータ1000に挿入されるフレキシブルディスク(FD)、CD−ROM、DVDディスク、光磁気ディスク、ICカードなどの「可搬用の物理媒体」に生体画像認証処理プログラム1031を記憶させておく。そして、コンピュータ1000がこれらから生体画像認証処理プログラム1031を読み出して実行するようにしても良い。
【0094】
以上の実施例1、2を含む実施形態に関し、さらに以下の付記を開示する。
【0095】
(付記1)手に関する生体情報を非接触で読み取る生体情報読取部と、
前記生体情報読取部を斜めに見下ろした場合の利用者の目線の高さと、前記生体情報読取部から前記利用者までの水平距離と、前記生体情報読取部から当該生体情報読取部上にかざす手までの垂直距離とから視差を算出する算出部と、
前記算出部によって算出された視差に基づき、前記利用者の目の位置と前記生体情報読取部上にかざす手の位置との延長線上であって前記生体情報読取部が取り付けられた水平面上にマーカの位置を決定する決定部と、
前記決定部によって決定された位置のマーカに、手に関する生体情報を読み取る対象部分の中心を合わせるように指示する指示部と
を有することを特徴とする電子装置。
【0096】
(付記2)目線の高さおよび手に関する前記対象部分の中心から肘までの水平距離を含む身体情報を身長に対応付けて記憶する身体情報記憶部を有し、
前記算出部は、前記身体情報記憶部に記憶された身体情報に基づき、利用者の身長に対応付けられた目線の高さと肘から手に関する前記対象部分の中心までの距離と、前記垂直距離とから視差を算出することを特徴とする付記1に記載の電子装置。
【0097】
(付記3)前記決定部は、あらかじめ段階的な複数の位置に配置されたマーカの中から、決定した位置に対応するマーカを点灯することを特徴とする付記1または付記2に記載の電子装置。
【0098】
(付記4)前記指示部によって指示された後、前記生体情報読取部が生体情報を読み取った撮像について、当該撮像の中心と対象部分の中心との距離が所定範囲内である場合、指示されたマーカの位置を利用者の識別情報と対応付けて記憶するマーカ位置記憶部をさらに有し、
前記決定部は、利用者におけるマーカの位置が前記マーカ位置記憶部に記憶されている場合、次回の前記利用者におけるマーカの位置に、前記算出部による視差の算出に代えて、前記マーカ位置記憶部に記憶されたマーカの位置を用いることを特徴とする付記1から付記3のいずれか1つに記載の電子装置。
【0099】
(付記5)利用者を撮像する撮像部と、
前記撮像部によって撮像された画像から、前記利用者の目線の高さと前記生体情報読取部から前記利用者までの水平距離とを解析する解析部とをさらに有し、
前記算出部は、前記解析部によって解析された目線の高さと、前記生体情報読取部から前記利用者までの水平距離と、前記垂直距離とから視差を算出する
ことを特徴とする付記1に記載の電子装置。
【0100】
(付記6)手に関する生体情報を非接触で読み取る生体情報読取部と、
前記生体情報読取部を斜めに見下ろした場合の利用者の目線の高さと、前記生体情報読取部から前記利用者までの水平距離と、前記生体情報読取部から当該生体情報読取部上にかざす手までの垂直距離とから視差を算出する算出部と、
前記算出部によって算出された視差に基づき、前記利用者の目の位置と前記生体情報読取部上にかざす手の位置との延長線上であって前記生体情報読取部が取り付けられた水平面上にマーカの位置を決定する決定部と、
前記決定部によって決定された位置のマーカに、手に関する生体情報を読み取る対象部分の中心を合わせるように指示する指示部と
を有することを特徴とする生体画像認証装置。
【0101】
(付記7)コンピュータに、
手に関する生体情報を非接触で読み取る生体情報読取部を斜めに見下ろした場合の利用者の目線の高さと、前記生体情報読取部から前記利用者までの水平距離と、前記生体情報読取部から当該生体情報読取部上にかざす手までの垂直距離とから視差を算出し、
該算出した視差に基づき、前記利用者の目の位置と前記生体情報読取部上にかざす手の位置との延長線上であって前記生体情報読取部が取り付けられた水平面上にマーカの位置を決定し、
該決定した位置のマーカに、手に関する生体情報を読み取る対象部分の中心を合わせるように指示する
処理を実行させる生体画像認証プログラム。
【0102】
(付記8)情報処理装置が生体画像を認証する生体画像認証方法であって、
手に関する生体情報を非接触で読み取る生体情報読取部を斜めに見下ろした場合の利用者の目線の高さと、前記生体情報読取部から前記利用者までの水平距離と、前記生体情報読取部から当該生体情報読取部上にかざす手までの垂直距離とから視差を算出し、
該算出した視差に基づき、前記利用者の目の位置と前記生体情報読取部上にかざす手の位置との延長線上であって前記生体情報読取部が取り付けられた水平面上にマーカの位置を決定し、
該決定した位置のマーカに、手に関する生体情報を読み取る対象部分の中心を合わせるように指示する
処理を含むことを特徴とする生体画像認証方法。
【符号の説明】
【0103】
1、2 生体画像認証装置
11 入力部
12 表示部
13 静脈センサ
14 記憶部
15 制御部
21 カメラ
141 身体情報テーブル
142 マーカ位置履歴テーブル
151、151B 視差算出部
151A 目線位置解析部
152 マーカ位置決定部
153 ガイダンス部
154 画像判定部
155 マーカ位置登録部
201 視差算出情報テーブル
【技術分野】
【0001】
本発明は、電子装置などに関する。
【背景技術】
【0002】
近年のバイオメトリクス技術の進展に伴い、手のひらの静脈を用いて個人認証する装置が種々提供されている。
【0003】
例えば、手のひらを撮像する非接触センサの一方の側に、非接触センサで撮像される手の手首を支持する前面ガイドを設置した認証用撮像装置がある。かかる認証用撮像装置は、手のひら認証のための撮像をする際に、前面ガイドにより手のひらを自然とセンサの撮像範囲に誘導することができ、手のひらを的確にセンサの撮像範囲に位置させることができる。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2006−11988号公報
【特許文献2】特開2009−122729号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、手のひらを撮像する非接触センサを情報処理装置などの電子装置に実装する場合には、利用者が手のひらを撮像に適した位置に合わせることが難しいという問題があった。例えば、手のひらを撮像する非接触センサを情報処理装置のキーボード手前側のパームレストの部分に実装する場合、利用者が手のひらを撮像に適した位置に合わせることが難しい。かかる問題について説明する。図15は、手のひらの位置合わせの課題を説明する図である。図15の符号A1に示すように、正しい手のひらの位置合わせでは、手のひらの中心が静脈センサ13の中心と一致するように位置することが望ましい。ところが、図15の符号A2、A3に示すように、利用者は上から静脈センサ13を斜めに見下ろして手のひらを静脈センサ13上にかざすので、手のひらの中心A2が静脈センサ13の中心A3より利用者側にずれてしまう。したがって、利用者は手のひらを静脈センサ13の撮像に適した位置に合わせることができない。
【0006】
従来の認証用撮像装置は、手首を支持する前面ガイドを設置することにより、手のひらを自然とセンサの撮像範囲に誘導することができる。ところが、手のひらを撮像する非接触センサを実装する電子装置では、物理的に拘束する前面ガイドを設置することが困難である。したがって、かかる電子装置は、従来の認証用撮像装置のように前面ガイドを設置することができず、利用者は手のひらを撮像に適した位置に合わせることができない。
【0007】
なお、上記課題は、手のひらを撮像する非接触センサに限らず、指を撮像する非接触センサ、手のひらや指の指紋を撮像する非接触センサでも同様に生ずる。
【0008】
開示の技術は、手を撮像する非接触センサを電子装置に実装する場合、利用者が手を撮像に適した位置に合わせることができることを目的とする。
【課題を解決するための手段】
【0009】
1つの側面では、電子装置は、手に関する生体情報を非接触で読み取る生体情報読取部と、前記生体情報読取部を斜めに見下ろした場合の利用者の目線の高さと、前記生体情報読取部から前記利用者までの水平距離と、前記生体情報読取部から当該生体情報読取部上にかざす手までの垂直距離とから視差を算出する算出部と、前記算出部によって算出された視差に基づき、前記利用者の目の位置と前記生体情報読取部上にかざす手の位置との延長線上であって前記生体情報読取部が取り付けられた水平面上にマーカの位置を決定する決定部と、前記決定部によって決定された位置のマーカに、手に関する生体情報を読み取る対象部分の中心を合わせるように指示する指示部とを有する。
【発明の効果】
【0010】
本願の開示する情報処理装置の一つの態様によれば、手を撮像する非接触センサを電子装置に実装する場合、利用者が手を撮像に適した位置に合わせることができる。
【図面の簡単な説明】
【0011】
【図1】図1は、実施例1に係る生体画像認証装置の構成を示す機能ブロック図である。
【図2】図2は、制御部で実行されるマーカ位置決定制御を説明する図である。
【図3】図3は、視差算出部による視差算出の説明をする図である。
【図4】図4は、身体情報テーブルのデータ構造の一例を示す図である。
【図5】図5は、マーカ位置決定部によるマーカ位置の決定の説明をする図である。
【図6】図6は、マーカ位置履歴テーブルのデータ構造の一例を示す図である。
【図7】図7は、マーカ位置決定制御(静脈登録時)の処理手順を示すフローチャートである。
【図8】図8は、マーカ位置決定制御(照合時)の処理手順を示すフローチャートである。
【図9】図9は、実施例2に係る生体画像認証装置の構成を示す機能ブロック図である。
【図10】図10は、視差算出情報テーブルのデータ構造の一例を示す図である。
【図11】図11は、視差算出部による視差算出の説明をする図である。
【図12】図12は、マーカ位置決定制御(静脈登録時)の処理手順を示すフローチャートである。
【図13】図13は、マーカ位置決定制御(照合時)の処理手順を示すフローチャートである。
【図14】図14は、生体画像認証処理プログラムを実行するコンピュータを示す図である。
【図15】図15は、手のひらの位置合わせの課題を説明する図である。
【発明を実施するための形態】
【0012】
以下に、本願の開示する電子装置、生体画像認証装置、生体画像認証プログラムおよび生体画像認証方法の実施例を図面に基づいて詳細に説明する。なお、以下の実施例では、キーボードの手前側のパームレストの部分に手のひら静脈センサを実装した生体画像認証装置に適用した場合を示す。しかし、本実施例によりこの発明が限定されるものではなく、本発明は、キーボードの手前側のパームレストの部分に生体情報を読み取るセンサを実装した電子装置に広く適用可能であり、ノート型のパーソナルコンピュータにも適用可能である。
【実施例1】
【0013】
図1は、実施例1に係る生体画像認証装置の構成を示す機能ブロック図である。図1に示すように、生体画像認証装置1は、入力部11と、表示部12と、静脈センサ13と、記憶部14と、制御部15とを有する。
【0014】
入力部11は、ユーザが各種の情報を生体画像認証装置1に入力するための入力装置である。例えば、入力部11は、キーボード、マウスに対応する。表示部12は、各種の情報を表示する表示装置である。例えば、表示部12は、ディスプレイに対応する。
【0015】
静脈センサ13は、手に関する生体情報を非接触で読み取る。実施例では、静脈センサ13は、手のひらの静脈パターンを非接触で読み取るセンサとする。静脈センサ13は、例えば、入力部11の手前側、すなわち利用者側のパームレストの部分に実装される。静脈センサ13は、近赤外線を手のひらに向けて発光し、手のひらから反射した近赤外線を受信し、受信した近赤外線の強弱で手のひらの静脈の位置を認識し、静脈パターンを読み取る。
【0016】
記憶部14は、身体情報テーブル141およびマーカ位置履歴テーブル142を記憶する。記憶部14は、例えば、RAM(Random Access Memory)、ROM(Read Only Memory)、フラッシュメモリ(Flash Memory)などの半導体メモリ素子、またはハードディスク、光ディスクなどの記憶装置に対応する。
【0017】
身体情報テーブル141は、後述する視差の算出の際にパラメータとして用いられる身体情報である。実施例では、身体情報テーブル141は、目線の高さおよび肘から手のひらの中心までの距離などの身体情報を身長に対応付けて記憶する。これは、目線の高さおよび腕の長さは、身長に応じて変わると推定されるからである。すなわち、身長が高くなるにつれて、目線の高さが高くなり、腕の長さが長くなり、身長が低くなるにつれて、目線の高さが低くなり、腕の長さが短くなる。
【0018】
マーカ位置履歴テーブル142は、視差に基づき決定されるマーカの位置を履歴として記憶する履歴情報である。なお、身体情報テーブル141およびマーカ位置履歴テーブル142のデータ構造については、後述する。
【0019】
制御部15は、視差算出部151、マーカ位置決定部152、ガイダンス部153、画像判定部154およびマーカ位置登録部155を有する。制御部15は、例えば、ASIC(Application Specific Integrated Circuit)や、FPGA(Field Programmable Gate Array)などの集積装置に対応する。また、制御部15は、例えば、CPUやMPU(Micro Processing Unit)などの電子回路に対応する。
【0020】
制御部15は、静脈センサ13上の適正な位置に手のひらをかざせるように、位置合わせの目印となるマーカの位置を決定する。ここで、制御部15で実行されるマーカ位置を決定する制御について、図2を参照して説明する。
【0021】
図2は、制御部で実行されるマーカ位置決定制御を説明する図である。図2に示すように、利用者は、静脈センサ13の斜め上から、手のひらを非接触で静脈センサ13上にかざす。制御部15は、利用者の目線の位置H0と、静脈センサ13上の手のひら中心の適正な位置A0と、マーカM0とが一直線に並ぶように、位置合わせ用のマーカM0の位置を決定する。すなわち、利用者は、視差の影響で手を手前側にかざしがちになる。そこで、制御部15は、位置合わせ用のマーカM0を視差(ここでは、D2)分だけ後方(奥側)にずらした位置に決定する。これにより、制御部15は、決定した位置の位置合わせ用のマーカM0を目印として、利用者に手のひらの中心を合わせるように導くことができる。この結果、利用者は、位置合わせ用のマーカM0に手のひらの中心を合わせるようにすることで、手のひらの中心を静脈センサ13上の適正な位置にかざすことができ、静脈認証の失敗を減らすことができる。なお、視差を算出するパラメータとして、利用者の目線の高さH1と、静脈センサ13から手のひらまでの垂直距離H2と、静脈センサ13から利用者までの水平距離D1とが用いられる。
【0022】
図1に戻って、視差算出部151は、静脈センサ13を斜めに見下ろした場合の利用者の目線の高さと、静脈センサ13から利用者までの水平距離と、静脈センサ13から当該静脈センサ13上にかざす手のひらまでの垂直距離とから視差を算出する。例えば、視差算出部151は、身体情報テーブル141に記憶された身体情報に基づき、利用者の身長に対応付けられた目線の高さおよび肘から手のひらの中心までの距離を読み出す。そして、視差算出部151は、読み出した目線の高さおよび肘から手のひらの中心までの距離と、静脈センサ13から静脈センサ13上にかざす手までの垂直距離とから視差を算出する。
【0023】
ここで、視差算出部151による視差を算出する方法について説明する。図3は、視差算出部による視差算出の説明をする図である。図3では、静脈センサ13が生体画像認証装置1のパームレストの部分に実装されているものとする。また、図3では、視差算出部151が、図2で示した、利用者の目線の高さH1と静脈センサ13から手のひらまでの垂直距離H2と静脈センサ13から利用者までの水平距離D1とを用いて、視差D2を算出するものとする。
【0024】
図3に示すように、視差算出部151は、相似三角形の計算を利用して、以下の式(1)を導出する。
H2/D2=H1/(D1+D2)・・・・・・・・・・(1)
したがって、視差算出部151は、視差D2を以下の式(2)を用いて算出する。
D2=H2×D1/(H1−H2)・・・・・・・・・・・・・・・(2)
【0025】
図1に戻って、静脈センサ13から静脈センサ13上にかざす手までの垂直距離は、一例として、利用者が静脈センサ13上に手をかざす際の平均的な距離として記憶部14に保持される。そして、視差算出部151は、記憶部14に保持された垂直距離の値を読み出して利用する。また、別の例では、静脈センサ13が、生体画像認証要求がされた際に、利用者によって静脈センサ13上にかざされた手までの位置を読み取り、読み取った位置までの垂直距離を視差算出部151に通知しても良い。
【0026】
ここで、身体情報テーブル141のデータ構造について、図4を参照して説明する。図4は、身体情報テーブルのデータ構造の一例を示す図である。図4に示すように、身体情報テーブル141は、目線の高さ141a、肘から手のひら中心までの距離141bおよび座高141cを、身長141dおよび机上の高さ141eに対応付けて記憶する。目線の高さ141aは、利用者が生体画像認証装置1を通常使用し得る体勢における、生体画像認証装置1が置かれた机上からの目線の高さを示し、身長および机上の高さに対して平均的な目線の高さを示す。肘から手のひら中心までの距離141bは、利用者が生体画像認証装置1を通常使用し得る体勢における肘から手のひら中心までの距離を示し、身長および机上の高さに対して平均的な距離を示す。座高141cは、身長に対する平均的な座高を示す。身長141dは、身長を示す。机上の高さ141eは、生体画像認証装置1を置く可能性のある机の高さを示す。
【0027】
例えば、身体情報テーブル141は、社団法人人間生活工学研究センターによる「日本人の人体計測データベース1992−1994」を利用して作成できる。一例として、身長141dが「170cm」、机上の高さ141eが「70cm」である場合、目線の高さ141aとして「48cm」と記憶する。そして、肘から手のひら中心までの距離141bとして「40cm」、座高141cとして「80cm」と記憶する。そして、このような身体情報を持つ利用者に関し、視差算出部151は、静脈センサ13から静脈センサ13上にかざす手までの垂直距離を「5cm」とすると、数式(2)に当てはめて、視差を4.65cmと算出する。
【0028】
図1に戻って、マーカ位置決定部152は、視差算出部151によって算出された視差に基づき、利用者の目の位置と静脈センサ13上にかざす手の位置との延長線上であって静脈センサ13が取り付けられた水平面上にマーカの位置を決定する。例えば、マーカ位置決定部152は、静脈センサ13の中心から視差算出部151によって算出された視差分だけ利用者より遠い位置にマーカの位置を決定する。一例として、マーカ位置決定部152は、あらかじめ段階的に複数の位置に配置されたマーカの中から、静脈センサ13の中心から視差分だけ利用者より遠い位置にあるマーカを決定する。すなわち、生体画像認証装置1は、想定されるいくつかの目線の高さに応じたマーカをあらかじめ複数配置し、これらマーカのうち、静脈センサ13の中心から視差分だけ利用者より遠い位置に配置されたマーカを決定する。なお、マーカは、発光ダイオード(LED:Light Emitting Diode)を一例とするが、これに限定されるものではない。LEDの場合には、マーカ位置決定部152は、決定したマーカを点灯させれば良い。
【0029】
ここで、マーカ位置決定部152によるマーカを決定する方法について説明する。図5は、マーカ位置決定部によるマーカ位置の決定の説明をする図である。図5に示すように、マーカ位置決定部152は、利用者の目の各位置J1、J2と静脈センサ13上にかざす手の位置A0との延長線上であって静脈センサ13が取り付けられた水平面上にマーカの位置を決定する。図5では、身長が高い利用者の目線の高さをJ1とし、身長が低い利用者の目線の高さをJ2とするものとする。身長が高い利用者の場合、目線の高さJ1は身長が低い利用者の目線の高さJ2より高くなる。このため、マーカ位置決定部152は、目の位置J1と手の位置A0との延長線上に配置された、静脈センサ13に近いマーカM2を決定する。一方、身長が低い利用者の場合、目線の高さJ2は身長が高い利用者の目線の高さJ1より低くなる。このため、マーカ位置決定部152は、目の位置J2と手の位置A0との延長線上に配置された、静脈センサ13に遠いマーカM1を決定する。
【0030】
図1に戻って、ガイダンス部153は、マーカ位置決定部152によって決定された位置のマーカに手のひらの中心を合わせるように指示する。例えば、マーカがLEDである場合、ガイダンス部153は、音声ガイダンスのアプリケーションにより、点灯しているマーカに手のひらの中心を合わせるように、音声でガイダンスする。別の例では、マーカがLEDである場合、ガイダンス部153は、点灯しているマーカに手のひらの中心を合わせるように、表示部12に表示する。
【0031】
画像判定部154は、静脈センサ13から手のひらの静脈の画像を取得し、取得した画像が適正位置で撮像された画像であるか否かを判定する。例えば、画像判定部154は、ガイダンス部153によってガイダンスされた後、静脈センサ13によって読み取られた手のひらの静脈の画像の中心と手のひらの中心との距離が所定範囲内であるか否かを判定する。そして、画像判定部154は、所定範囲内であれば、適正位置で撮像された画像であると判断する。一方、画像判定部154は、所定範囲外であれば、適正位置で撮像された画像でないと判断する。
【0032】
一例として、画像判定部154は、静脈センサ13によって読み取られた手のひらの静脈の画像の中心点を静脈センサ13の中心点とする。また、画像判定部154は、同じ画像の中心点に一番近いところにある指間の付け根から所定値だけ下側の点を手のひらの中心点と推定する。そして、画像判定部154は、静脈センサ13の中心点と手のひらの中心点との距離が所定範囲内であるか否かを判定する。
【0033】
また、画像判定部154は、静脈センサ13から取得した画像が適正位置で撮像された画像であると判定した場合、ガイダンス部153によってガイダンスされたマーカの位置を登録するようにマーカ位置登録部155に指示する。また、画像判定部154は、静脈センサ13から取得した画像が適正位置で撮像された画像でないと判定した場合、マーカの位置を再び決定するようにマーカ位置決定部152に指示する。
【0034】
マーカ位置登録部155は、ガイダンス部153によってガイダンスされたマーカの位置を利用者の識別情報と対応付けて登録する。例えば、マーカ位置登録部155は、ガイダンス部153によってガイダンスされたマーカの位置とともに、利用者の身長と生体情報とを利用者の識別情報に対応付けてマーカ位置履歴テーブル142に登録する。
【0035】
ある利用者におけるマーカの位置がマーカ位置履歴テーブル142に登録された場合、マーカ位置決定部152は、当該利用者における次回のマーカの位置を、マーカ位置履歴テーブル142を利用して決定することができる。すなわち、マーカ位置決定部152は、視差算出部151による視差の算出によらないで、マーカ位置履歴テーブル142に記憶されたマーカ位置142cを用いてマーカの位置を決定する。
【0036】
ここで、マーカの位置を登録するマーカ位置履歴テーブル142のデータ構造について、図6を参照して説明する。図6は、マーカ位置履歴テーブルのデータ構造を示す図である。図6に示すように、マーカ位置履歴テーブル142は、ユーザID142a、身長142b、マーカ位置142cおよび生体情報142dを対応付けて記憶する。ユーザID142aは、利用者の識別情報を示す。身長142bは、利用者の身長を示す。マーカ位置142cは、利用者のマーカの位置を示す。生体情報142dは、利用者の生体情報を示す。一例として、ユーザID142aが「00001」である場合、身長142bとして「160cm」、マーカ位置142cとして「5.2cm」、生体情報142dとして「手のひらの静脈の生体情報」を記憶する。
【0037】
次に、実施例1に係るマーカ位置決定制御の処理手順を、図7および図8を参照して説明する。図7は、マーカ位置決定制御(静脈登録時)の処理手順を示すフローチャートであり、図8は、マーカ位置決定制御(照合時)の処理手順を示すフローチャートである。なお、以下の説明では、マーカとして、想定されるいくつかの目線の高さに応じたLED(マーカLED)を、あらかじめ複数配置されているものとする。
【0038】
[実施例1に係るマーカ位置決定制御(静脈登録時)の処理手順]
まず、視差算出部151は、利用者から生体画像認証要求があったか否かを判定する(ステップS11)。生体画像認証要求がなかったと判定した場合(ステップS11;No)、視差算出部151は、利用者から生体画像認証要求があったと判定するまで、判定処理を繰り返す。一方、生体画像認証要求があったと判定した場合(ステップS11;Yes)、視差算出部151は、入力部11を介して、利用者からユーザIDを取得する(ステップS12)。
【0039】
そして、視差算出部151は、取得したユーザIDに関し、初回の制御であるか否かを判定する(ステップS13)。例えば、視差算出部151は、取得したユーザIDに対応付けられたマーカ位置がマーカ位置履歴テーブル142に記憶されているか否かで判定する。そして、取得したユーザIDに関し、初回の制御でない場合は(ステップS13;No)、視差算出部151は、照合時の制御であると判断し、照合時のマーカ位置決定制御に移行すべく、ステップS31に移行する。
【0040】
一方、取得したユーザIDに関し、初回の制御である場合は(ステップS13;Yes)、視差算出部151は、静脈登録時の制御であると判断し、入力部11を介して、利用者から身長情報を取得する(ステップS14)。
【0041】
続いて、視差算出部151は、身長情報を用いて視差を算出する(ステップS15)。例えば、視差算出部151は、身体情報テーブル141に記憶された身体情報に基づき、利用者の身長情報に対応付けられた目線の高さ141aおよび肘から手のひら中心までの距離141bを読み出す。そして、視差算出部151は、読み出した目線の高さおよび肘から手のひら中心までの距離と、静脈センサ13から静脈センサ13上にかざす手までの垂直距離とから視差を算出する。
【0042】
そして、マーカ位置決定部152は、算出した視差に対応するマーカLEDを点灯する(ステップS16)。例えば、マーカ位置決定部152は、静脈センサ13の中心から視差算出部151によって算出された視差分だけ利用者より遠い位置のマーカLEDを点灯する。すなわち、マーカ位置決定部152は、視差に基づき、利用者の目の位置と静脈センサ13上にかざす手の位置との延長線上であって静脈センサ13が取り付けられた水平面上のマーカLEDを点灯する。
【0043】
続いて、ガイダンス部153は、アプリケーションを用いたガイダンスにより、決定したマーカLEDに手のひらの中心を合わせるように指示する(ステップS17)。例えば、ガイダンス部153は、音声ガイダンスのアプリケーションにより、点灯しているマーカLEDに手のひらの中心を合わせるように、音声でガイダンスする。
【0044】
その後、画像判定部154は、静脈センサ13から手のひらの静脈の画像を取得する(ステップS18)。そして、画像判定部154は、取得した画像が適正位置で撮像された画像であるか否かを判定する(ステップS19)。取得した画像が適正位置で撮像された画像でないと判定した場合(ステップS19;No)、画像判定部154は、マーカLEDの位置を再び決定するようにマーカ位置決定部152に指示する。そして、マーカ位置決定部152は、誘導した方向のマーカLEDを点灯し(ステップS20)、ステップS17に移行する。
【0045】
一方、取得した画像が適正位置で撮像された画像であると判定した場合(ステップS19;Yes)、マーカ位置登録部155は、ユーザIDとマーカLEDの位置と静脈画像とを対応させてマーカ位置履歴テーブル142に保存する(ステップS21)。そして、マーカ位置決定制御が終了する。
【0046】
[実施例1に係るマーカ位置決定制御(照合時)の処理手順]
照合時のマーカ位置決定制御では、マーカ位置決定部152は、静脈登録時のマーカ位置履歴テーブル142に記憶された履歴に基づいて、ユーザIDに対応付けられたマーカ位置のマーカLEDを点灯する(ステップS31)。
【0047】
続いて、ガイダンス部153は、アプリケーションを用いたガイダンスにより、決定したマーカLEDに手のひらの中心を合わせるように指示する(ステップS32)。例えば、ガイダンス部153は、音声ガイダンスのアプリケーションにより、点灯しているマーカLEDに手のひら中心を合わせるように、音声でガイダンスする。
【0048】
その後、画像判定部154は、静脈センサ13から手のひらの静脈の画像を取得する(ステップS33)。そして、画像判定部154は、取得した画像が適正位置で撮像された画像であるか否かを判定する(ステップS34)。取得した画像が適正位置で撮像された画像でないと判定した場合(ステップS34;No)、画像判定部154は、マーカLEDの位置を再び決定するようにマーカ位置決定部152に指示する。そして、マーカ位置決定部152は、誘導した方向のマーカLEDを点灯し(ステップS35)、ステップS32に移行する。
【0049】
一方、取得した画像が適正位置で撮像された画像であると判定した場合(ステップS34;Yes)、画像判定部154は、取得した画像とマーカ位置履歴テーブル142のユーザIDに対応する生体情報142dとを照合して認証を行う(ステップS36)。照合が成功した場合(ステップS37;Yes)、マーカ位置登録部155は、ユーザIDとマーカLEDの位置とを対応させてマーカ位置履歴テーブル142に保存する(ステップS38)。そして、マーカ位置決定制御が終了する。
【0050】
一方、照合が失敗した場合(ステップS37;No)、画像判定部154は、照合の失敗を、例えば表示部12に表示させて報知する(ステップS39)。そして、マーカ位置決定制御が終了する。
【0051】
[実施例1の効果]
上記実施例1によれば、生体画像認証装置1は、静脈センサ13を斜めに見下ろした場合の利用者の目線の高さと、静脈センサ13から利用者までの水平距離と、静脈センサ13から当該静脈センサ13上にかざす手までの垂直距離とから視差を算出する。そして、生体画像認証装置1は、算出された視差に基づき、利用者の目の位置と静脈センサ13上にかざす手の位置との延長線上であって静脈センサ13が取り付けられた水平面上にマーカの位置を決定する。そして、生体画像認証装置1は、決定された位置のマーカに、手のひらの中心を合わせるように指示する。かかる構成によれば、生体画像認証装置1は、利用者の手のひらを、静脈センサ13が読み取るのに適した位置に合わせることができる。この結果、生体画像認証装置1は、静脈センサ13上を斜めに見下ろした場合に手のひらを静脈センサ13上の適した位置より手前にかざしてしまうことに起因する、静脈センサ13で読み取る手のひら領域の欠損を防ぐことができる。これにより、生体画像認証装置1は、本人認証の正解率の向上を図ることができる。
【0052】
また、上記実施例1によれば、生体画像認証装置1は、目線の高さおよび手のひらの中心から肘までの水平距離を含む身体情報を身長に対応付けて記憶する身体情報テーブル141を有する。そして、生体画像認証装置1は、身体情報テーブル141に記憶された身体情報に基づき、利用者の身長に対応付けられた目線の高さと手のひらの中心から肘までの水平距離と、当該静脈センサ13上にかざす手までの垂直距離とから視差を算出する。かかる構成によれば、生体画像認証装置1は、身体情報テーブル141に身長に対応付けられた目線の高さおよび手のひらの中心から肘までの水平距離を記憶するので、記憶した情報を用いて容易に視差を算出できる。
【0053】
また、上記実施例1によれば、生体画像認証装置1は、あらかじめ段階的な複数の位置にマーカとして配置されたLEDの中から、決定した位置に対応するLEDを点灯する。かかる構成によれば、生体画像認証装置1は、利用者に対して点灯するLEDを目印とさせることにより、利用者の手のひらを、静脈センサ13が読み取るのに適した位置に合わせやすくすることができる。
【0054】
また、上記実施例1によれば、生体画像認証装置1は、静脈センサ13が静脈パターンを読み取った画像について、当該画像の中心と手のひらの中心との距離が所定範囲内である場合、指示されたマーカの位置を利用者の識別情報と対応付けて記憶する。そして、生体画像認証装置1は、利用者におけるマーカの位置が記憶されている場合、次回の利用者におけるマーカの位置に、視差の算出に代えて、記憶されたマーカの位置を用いるようにした。かかる構成によれば、生体画像認証装置1は、次回の利用者におけるマーカの位置に、記憶されたマーカの位置を利用することで、処理の効率化を図ることができる。
【実施例2】
【0055】
ところで、実施例1では、視差を算出するために用いられるパラメータである目線の高さおよび静脈センサ13から利用者までの水平距離を身長に対応付けて身体情報テーブル141に記憶するようにした。そして、生体画像認証装置1は、身体情報テーブル141に記憶された身体情報から利用者の身長に対応付けた目線の高さと静脈センサ13から利用者までの水平距離とを取得し、取得した情報を用いて視差を算出する場合を説明した。しかしながら、生体画像認証装置1は、これに限定されず、カメラを用いて、視差を算出するために用いられるパラメータである目線の高さおよび静脈センサ13から利用者までの水平距離を解析し、解析した情報を用いて視差を算出しても良い。
【0056】
そこで、実施例2では、生体画像認証装置2が、カメラを用いて、視差を算出するために用いられるパラメータである目線の高さおよび静脈センサ13から利用者までの水平距離を解析し、解析した情報を用いて視差を算出する場合を説明する。
【0057】
[実施例2に係る生体画像認証装置の構成]
図9は、実施例2に係る生体画像認証装置の構成を示す機能ブロック図である。なお、図1に示す生体画像認証装置1と同一の構成については同一符号を示すことで、その重複する構成および動作の説明については省略する。実施例1と実施例2とが異なるところは、カメラ21を追加した点にある。また、実施例1と実施例2とが異なるところは、制御部15に目線位置解析部151Aを追加し、視差算出部151Bを変更した点にある。また、実施例1と実施例2とが異なるところは、身体情報テーブル141を削除し、視差算出情報テーブル201を新たに追加した点にある。
【0058】
カメラ21は、利用者の顔画像を撮像する。カメラ21は、生体画像認証装置2がノートPC(Personal Computer)である場合、ノートPCに搭載されるWebカメラを一例とする。カメラ21は、例えば、表示部12の顔の画像が撮像できる部分に実装される。
【0059】
視差算出情報テーブル201は、視差の算出の際に用いられる情報である。すなわち、視差算出情報テーブル201は、視差を算出するために用いられるパラメータの1つである静脈センサ13から利用者までの水平距離を算出するための情報である。ここで、視差算出情報テーブル201のデータ構造について、図10を参照して説明する。図10は、視差算出情報テーブルのデータ構造の一例を示す図である。図10に示すように、視差算出情報テーブル201は、ユーザID201a、標準的な奥行き201bおよび標準的な顔の大きさ201cを対応付けて記憶する。ユーザID201aは、利用者の識別情報を示す。標準的な奥行き201bは、利用者が生体画像認証装置2を通常使用し得る標準的な体勢での利用者の位置から静脈センサ13までの奥行き(水平距離)を示す。標準的な顔の大きさ201cは、利用者が生体画像認証装置2を通常使用し得る標準的な体勢でのカメラ21から撮像される利用者の顔の大きさを示す。顔の大きさの一例として、頭頂部からあごまでの長さとする。
【0060】
なお、標準的な奥行き201bおよび標準的な顔の大きさ201cは、利用者が生体認証を開始するまでにカメラ21を利用してあらかじめ設定される。ここで、カメラ21の撮像位置が、標準的な奥行き201bなどをあらかじめ設定する時と、実際に生体認証を行う時とで異なる場合がある。例えば、生体画像認証装置2がノートPCであり、ノートPCのモニタの上部にカメラ21が実装されているとすると、これら2つの時のモニタの画角が異なる場合が考えられる。しかしながら、ノートPCのモニタの画角は、利用者が通常使用し得る標準的な体勢から見て大きく異ならないものである。そこで、ここでは、利用者が通常使用し得る標準的な体勢で使用することを条件に、ノートPCのモニタの画角が使用時で若干違っていたとしても誤差の範囲内であるとしてその違いを考慮しないものとする。
【0061】
目線位置解析部151Aは、生体認証の際、カメラ21によって撮像された利用者の顔画像から、生体認証時の体勢での利用者の目線の高さと静脈センサ13から利用者までの奥行き(水平距離)とを解析する。例えば、目線位置解析部151Aは、カメラ21によって撮像された利用者の顔画像から目を認識し、認識した目の位置から目線の高さを解析する。また、目線位置解析部151Aは、撮像された顔画像から顔の大きさを解析する。また、目線位置解析部151Aは、解析した顔の大きさの標準的な顔の大きさに対する比率を算出する。すなわち、目線位置解析部151Aは、生体認証時の体勢での顔の大きさと標準的な体勢での顔の大きさとを比較して、生体認証時の体勢が標準的な体勢と比べカメラ21に対して近い距離にあるか遠い距離にあるかを算出する。目線位置解析部151Aは、この算出結果を用いて、生体認証時の体勢における奥行きを算出する。一例として、目線位置解析部151Aは、視差算出情報テーブル201に基づいて、利用者に対応する標準的な顔の大きさ201cを読み出し、読み出した標準的な顔の大きさを、解析した顔の大きさで割算し、顔の大きさの比率を算出する。そして、目線位置解析部151Aは、算出した顔の大きさの比率を、視差算出情報テーブル201に記憶された利用者に対応する標準的な奥行き201bに乗じ、静脈センサ13から撮像された利用者までの奥行き(水平距離)を解析する。
【0062】
視差算出部151Bは、静脈センサ13を斜めに見下ろした場合の利用者の目線の高さと、静脈センサ13から利用者までの水平距離と、静脈センサ13から当該静脈センサ13上にかざす手のひらまでの垂直距離とから視差を算出する。例えば、視差算出部151Bは、目線位置解析部151Aから目線の高さおよび静脈センサ13から利用者までの水平距離を取得し、取得した情報と、静脈センサ13から静脈センサ13上にかざす手までの垂直距離とから視差を算出する。つまり、視差算出部151Bは、視差を相似三角形の計算を利用して算出する。
【0063】
静脈センサ13から静脈センサ13上にかざす手までの垂直距離は、一例として、利用者が静脈センサ13上に手をかざす際の平均的な距離として記憶部14に保持される。そして、視差算出部151Bは、記憶部14に保持された垂直距離の値を読み出して利用する。また、別の例では、静脈センサ13が、生体画像認証要求がされた際に、利用者によって静脈センサ13上にかざされた手までの位置を読み取り、読み取った位置までの垂直距離を視差算出部151Bに通知しても良い。
【0064】
ここで、視差算出部151Bによる視差を算出する方法について説明する。図11は、視差算出部による視差算出の説明をする図である。図11では、生体画像認証装置2がノートPCであるものとして説明する。図11では、静脈センサ13が生体画像認証装置2のパームレストの部分に実装されているものとする。また、図11では、生体画像認証装置2にカメラ21が搭載されているものとする。
【0065】
まず、視差算出部151Bは、利用者Pの目線の高さH3および静脈センサ13から利用者Pまでの水平距離D3を、目線位置解析部151Aから取得する。利用者Pの目線の高さH3および静脈センサ13から利用者Pまでの水平距離D3は、目線位置解析部151Aによって以下のように算出される。
【0066】
目線位置解析部151Aは、カメラ21によって撮像された利用者Pの顔画像から目を認識し、認識した目の位置から目線の高さH3を解析する。また、目線位置解析部151Aは、撮像された顔画像から顔の大きさF2を算出し、視差算出情報テーブル201にあらかじめ記憶された利用者Pの標準的な顔の大きさ201cに対する顔の大きさF2の比率を算出する。そして、目線位置解析部151Aは、算出した比率を、視差算出情報テーブル201にあらかじめ記憶された利用者Pに対応する標準的な奥行き201bに乗じ、静脈センサ13から利用者Pまでの奥行きD3を算出する。
【0067】
そして、視差算出部151Bは、目線位置解析部151Aによって算出された目線の高さH3および奥行き(水平距離)D3を取得する。そして、視差算出部151Bは、取得した目線の高さH3と、奥行き(水平距離)D3と、静脈センサ13から当該静脈センサ13上にかざす手のひらまでの垂直距離H2とから利用者Pの視差D2を算出する。なお、視差D2を算出する方法については、図3を参照して説明したので、その説明を省略する。そして、視差算出部151Bによって算出された視差D2に基づき、マーカ位置決定部152は、利用者Pの目の位置と静脈センサ13上にかざす手のひらの位置との延長線上であって静脈センサ13が取り付けられた水平面上にマーカの位置を決定する。ここでは、マーカ位置決定部152は、複数のマーカM11、M12、M13のうち、視差D2に基づいて、マーカM12の位置を決定する。
【0068】
次に、実施例2に係るマーカ位置決定制御の処理手順を、図12および図13を参照して説明する。図12は、マーカ位置決定制御(静脈登録時)の処理手順を示すフローチャートであり、図13は、マーカ位置決定制御(照合時)の処理手順を示すフローチャートである。なお、以下の説明では、マーカとして、想定されるいくつかの目線の高さに応じたLED(マーカLED)を、あらかじめ複数配置されているものとする。
【0069】
[実施例2に係るマーカ位置決定制御(静脈登録時)の処理手順]
まず、目線位置解析部151Aは、利用者から生体画像認証要求があったか否かを判定する(ステップS51)。生体画像認証要求がなかったと判定した場合(ステップS51;No)、目線位置解析部151Aは、利用者から生体画像認証要求があったと判定するまで、判定処理を繰り返す。一方、生体画像認証要求があったと判定した場合(ステップS51;Yes)、目線位置解析部151Aは、入力部11を介して、利用者からユーザIDを取得する(ステップS52)。
【0070】
そして、目線位置解析部151Aは、取得したユーザIDに関し、初回の制御であるか否かを判定する(ステップS53)。例えば、目線位置解析視部151Aは、取得したユーザIDに対応付けられたマーカ位置がマーカ位置履歴テーブル142に記憶されているか否かで判定する。そして、取得したユーザIDに関し、初回の制御でない場合は(ステップS53;No)、目線位置解析部151Aは、照合時の制御であると判断し、照合時のマーカ位置決定制御に移行すべく、ステップS71に移行する。
【0071】
一方、取得したユーザIDに関し、初回の制御である場合は(ステップS53;Yes)、目線位置解析部151Aは、静脈登録時の制御であると判断し、カメラ21により顔画像を検出する(ステップS54)。
【0072】
そして、目線位置解析部151Aは、検出した顔画像を用いて目線位置(高さ、奥行き)を推定する(ステップS55)。すなわち、目線位置解析部151Aは、顔画像から目を認識し、認識した目の位置から利用者の目線の高さを推定する。また、目線位置解析部151Aは、顔画像から顔の大きさを解析し、解析した顔の大きさと利用者の標準的な顔の大きさとから比率を算出し、算出した比率を、利用者の標準的な奥行きに乗じ、静脈センサ13から利用者までの奥行き(水平距離)を推定する。標準的な顔の大きさおよび標準的な奥行きは利用者毎にあらかじめ視差算出情報テーブル201に記憶されている。
【0073】
続いて、視差算出部151Bは、推定した目線位置から視差を算出する(ステップS56)。すなわち、視差算出部151Bは、目線位置解析部151Aから目線位置として推定された目線の高さおよび静脈センサ13から利用者までの奥行き(水平距離)を取得する。そして、視差算出部151Bは、取得した情報と、静脈センサ13から静脈センサ13上にかざす手までの垂直距離とから視差を算出する。
【0074】
そして、マーカ位置決定部152は、算出した視差に対応するマーカLEDを点灯する(ステップS57)。例えば、マーカ位置決定部152は、静脈センサ13の中心から視差算出部151Bによって算出された視差分だけ利用者より遠い位置のマーカLEDを点灯する。すなわち、マーカ位置決定部152は、視差に基づき、利用者の目の位置と静脈センサ13上にかざす手の位置との延長線上にマーカLEDを点灯する。
【0075】
続いて、ガイダンス部153は、アプリケーションを用いたガイダンスにより、決定したマーカLEDに手のひらの中心を合わせるように指示する(ステップS58)。例えば、ガイダンス部153は、音声ガイダンスのアプリケーションにより、点灯しているマーカLEDに手のひら中心を合わせるように、音声でガイダンスする。
【0076】
その後、画像判定部154は、静脈センサ13から手のひらの静脈の画像を取得する(ステップS59)。そして、画像判定部154は、取得した画像が適正位置で撮像された画像であるか否かを判定する(ステップS60)。取得した画像が適正位置で撮像された画像でないと判定した場合(ステップS60;No)、画像判定部154は、マーカLEDの位置を再び決定するようにマーカ位置決定部152に指示する。そして、マーカ位置決定部152は、誘導した方向のマーカLEDを点灯し(ステップS61)、ステップS58に移行する。
【0077】
一方、取得した画像が適正位置で撮像された画像であると判定した場合(ステップS60;Yes)、マーカ位置登録部155は、ユーザIDとマーカLEDの位置と静脈画像とを対応させてマーカ位置履歴テーブル142に保存する(ステップS62)。そして、マーカ位置決定制御が終了する。
【0078】
[実施例2に係るマーカ位置決定制御(照合時)の処理手順]
照合時のマーカ位置決定制御では、マーカ位置決定部152は、静脈登録時のマーカ位置履歴テーブル142に記憶された履歴に基づいて、ユーザIDに対応付けられたマーカ位置のマーカLEDを点灯する(ステップS71)。
【0079】
続いて、ガイダンス部153は、アプリケーションを用いたガイダンスにより、決定したマーカLEDに手のひらの中心を合わせるように指示する(ステップS72)。
【0080】
その後、画像判定部154は、静脈センサ13から手のひらの静脈の画像を取得する(ステップS73)。そして、画像判定部154は、取得した画像が適正位置で撮像された画像であるか否かを判定する(ステップS74)。取得した画像が適正位置で撮像された画像でないと判定した場合(ステップS74;No)、画像判定部154は、マーカLEDの位置を再び決定するようにマーカ位置決定部152に指示する。そして、マーカ位置決定部152は、誘導した方向のマーカLEDを点灯し(ステップS75)、ステップS72に移行する。
【0081】
一方、取得した画像が適正位置で撮像された画像であると判定した場合(ステップ74;Yes)、画像判定部154は、取得した画像とマーカ位置履歴テーブル142のユーザIDに対応する生体情報142dとを照合して認証を行う(ステップS76)。照合が成功した場合(ステップS77;Yes)、マーカ位置登録部155は、ユーザIDとマーカLEDの位置とを対応させてマーカ位置履歴テーブル142に保存する(ステップS78)。そして、マーカ位置決定制御が終了する。
【0082】
一方、照合が失敗した場合(ステップS77;No)、画像判定部154は、照合の失敗を、例えば表示部12に表示させて報知する(ステップS79)。そして、マーカ位置決定制御が終了する。
【0083】
[実施例2の効果]
上記実施例2によれば、生体画像認証装置2は、利用者を撮像するカメラ21を備え、カメラ21によって撮像された顔画像から、利用者の目線の高さと静脈センサ13から利用者までの水平距離とを解析する。そして、生体画像認証装置2は、解析された目線の高さと、解析された水平距離と、静脈センサ13から当該静脈センサ13上にかざす手までの垂直距離とから視差を算出する。そして、生体画像認証装置2は、算出された視差に基づき、利用者の目の位置と静脈センサ13上にかざす手の位置との延長線上であって静脈センサ13が取り付けられた水平面上にマーカの位置を決定する。そして、生体画像認証装置2は、決定された位置のマーカに、手のひらの中心を合わせるように指示する。かかる構成によれば、生体画像認証装置2は、利用者の手のひらを、静脈センサ13が読み取るのに適した位置に合わせることができる。この結果、生体画像認証装置2は、静脈センサ13上を斜めに見下ろした場合に手のひらを静脈センサ13上の適した位置より手前にかざしてしまうことに起因する、静脈センサ13で読み取る手のひら領域の欠損を防ぐことができる。これにより、生体画像認証装置2は、本人認証の正解率の向上を図ることができる。さらに、生体画像認証装置2は、カメラ21によって撮像された顔画像を利用して利用者の目線の高さと静脈センサ13から利用者までの水平距離とを解析するので、解析したこれら情報を用いて視差を精度良く算出できる。
【0084】
なお、視差算出情報テーブル201は、標準的な顔の大きさ201cを、ユーザID201aおよび標準的な奥行き201bと対応付けて記憶するものとして説明した。しかしながら、視差算出情報テーブル201は、標準的な目の間隔を、ユーザID201aおよび標準的な奥行き201bと対応付けて記憶するものとしても良い。標準的な目の間隔は、利用者が生体画像認証装置2を通常使用し得る標準的な体勢での利用者の目の間隔を示す。この場合、目線位置解析部151Aは、撮像された顔画像から目の間隔を解析する。また、目線位置解析部151Aは、視差算出情報テーブル201に基づいて、利用者に対応する標準的な目の間隔を読み出し、読み出した標準的な目の間隔を、解析した目の間隔で割算し、比率を算出する。そして、目線位置解析部151Aは、算出した比率を、視差算出情報テーブル201に記憶された利用者に対応する標準的な奥行き201bに乗じ、静脈センサ13から撮像された利用者までの奥行き(水平距離)を解析すれば良い。
【0085】
また、実施例では、静脈センサ13を手のひらの静脈パターンを読み取るセンサであるものとして説明した。しかしながら、静脈センサ13は、これに限定されるものではなく、手に関する生体情報を読み取るセンサであれば良く、例えば、指の静脈パターンを読み取るセンサであっても、手のひらや指の指紋を読み取るセンサであっても良い。
【0086】
[プログラムなど]
なお、生体画像認証装置1、2は、既知のパーソナルコンピュータ、ワークステーションなどの情報処理装置に、上記した視差算出部151、マーカ位置決定部152、ガイダンス部153などの各機能を搭載することによって実現することができる。
【0087】
また、図示した各装置の各構成要素は、必ずしも物理的に図示の如く構成されていることを要しない。すなわち、各装置の分散・統合の具体的態様は図示のものに限られず、その全部または一部を、各種の負荷や使用状況などに応じて、任意の単位で機能的または物理的に分散・統合して構成することができる。例えば、視差算出部151とマーカ位置決定部152とを1個の部として統合しても良い。一方、マーカ位置決定部152を、静脈登録時にマーカを決定する第1のマーカ位置決定部と照合時にマーカを決定する第2のマーカ位置決定部とに分散しても良い。また、身体情報テーブル141などの記憶部を生体画像認証装置1、2の外部装置としてネットワーク経由で接続するようにしても良い。
【0088】
また、上記実施例で説明した各種の処理は、あらかじめ用意されたプログラムをパーソナルコンピュータやワークステーションなどのコンピュータで実行することによって実現することができる。そこで、以下では、図14を用いて、図1に示した生体画像認証装置1の制御部15と同様の機能を有する生体画像認証処理プログラムを実行するコンピュータの一例を説明する。
【0089】
図14は、生体画像認証処理プログラムを実行するコンピュータを示す図である。図14に示すように、コンピュータ1000は、RAM1010と、ネットワークインタフェース装置1020と、HDD1030と、CPU1040、媒体読取装置1050、カメラ1060、静脈センサ1070およびバス1080とを有する。RAM1010、ネットワークインタフェース装置1020、HDD1030、CPU1040、媒体読取装置1050、カメラ1060、静脈センサ1070は、バス1080によって接続されている。
【0090】
そして、HDD1030には、図1に示した制御部15と同様の機能を有する生体画像認証処理プログラム1031が記憶される。また、HDD1030には、図1に示した身体情報テーブル141およびマーカ位置履歴テーブル142に対応する生体画像認証処理関連情報1032が記憶される。
【0091】
そして、CPU1040が生体画像認証処理プログラム1031をHDD1030から読み出してRAM1010に展開することにより、生体画像認証処理プログラム1031は、生体画像認証処理プロセス1011として機能するようになる。そして、生体画像認証処理プロセス1011は、生体画像認証処理関連情報1032から読み出した情報などを適宜RAM1010上の自身に割り当てられた領域に展開し、この展開したデータなどに基づいて各種データ処理を実行する。
【0092】
媒体読取装置1050は、生体画像認証処理プログラム1031がHDD1030に格納されていない場合であっても生体画像認証処理プログラム1031を記憶する媒体などから生体画像認証処理プログラム1031を読み取る。媒体読取装置1050には、例えばCD−ROMや光ディスク装置がある。また、ネットワークインタフェース装置1020は、外部装置とネットワーク経由で接続する装置であり、有線、無線に対応するものである。また、カメラ1060は、利用者の画像を撮影する装置である。また、静脈センサ1070は、手のひらの静脈パターンを非接触で読み取るセンサであり、パームレストの部分に実装される。
【0093】
なお、上記の生体画像認証処理プログラム1031については、必ずしも最初からHDD1030に記憶させておかなくても良い。例えば、コンピュータ1000に挿入されるフレキシブルディスク(FD)、CD−ROM、DVDディスク、光磁気ディスク、ICカードなどの「可搬用の物理媒体」に生体画像認証処理プログラム1031を記憶させておく。そして、コンピュータ1000がこれらから生体画像認証処理プログラム1031を読み出して実行するようにしても良い。
【0094】
以上の実施例1、2を含む実施形態に関し、さらに以下の付記を開示する。
【0095】
(付記1)手に関する生体情報を非接触で読み取る生体情報読取部と、
前記生体情報読取部を斜めに見下ろした場合の利用者の目線の高さと、前記生体情報読取部から前記利用者までの水平距離と、前記生体情報読取部から当該生体情報読取部上にかざす手までの垂直距離とから視差を算出する算出部と、
前記算出部によって算出された視差に基づき、前記利用者の目の位置と前記生体情報読取部上にかざす手の位置との延長線上であって前記生体情報読取部が取り付けられた水平面上にマーカの位置を決定する決定部と、
前記決定部によって決定された位置のマーカに、手に関する生体情報を読み取る対象部分の中心を合わせるように指示する指示部と
を有することを特徴とする電子装置。
【0096】
(付記2)目線の高さおよび手に関する前記対象部分の中心から肘までの水平距離を含む身体情報を身長に対応付けて記憶する身体情報記憶部を有し、
前記算出部は、前記身体情報記憶部に記憶された身体情報に基づき、利用者の身長に対応付けられた目線の高さと肘から手に関する前記対象部分の中心までの距離と、前記垂直距離とから視差を算出することを特徴とする付記1に記載の電子装置。
【0097】
(付記3)前記決定部は、あらかじめ段階的な複数の位置に配置されたマーカの中から、決定した位置に対応するマーカを点灯することを特徴とする付記1または付記2に記載の電子装置。
【0098】
(付記4)前記指示部によって指示された後、前記生体情報読取部が生体情報を読み取った撮像について、当該撮像の中心と対象部分の中心との距離が所定範囲内である場合、指示されたマーカの位置を利用者の識別情報と対応付けて記憶するマーカ位置記憶部をさらに有し、
前記決定部は、利用者におけるマーカの位置が前記マーカ位置記憶部に記憶されている場合、次回の前記利用者におけるマーカの位置に、前記算出部による視差の算出に代えて、前記マーカ位置記憶部に記憶されたマーカの位置を用いることを特徴とする付記1から付記3のいずれか1つに記載の電子装置。
【0099】
(付記5)利用者を撮像する撮像部と、
前記撮像部によって撮像された画像から、前記利用者の目線の高さと前記生体情報読取部から前記利用者までの水平距離とを解析する解析部とをさらに有し、
前記算出部は、前記解析部によって解析された目線の高さと、前記生体情報読取部から前記利用者までの水平距離と、前記垂直距離とから視差を算出する
ことを特徴とする付記1に記載の電子装置。
【0100】
(付記6)手に関する生体情報を非接触で読み取る生体情報読取部と、
前記生体情報読取部を斜めに見下ろした場合の利用者の目線の高さと、前記生体情報読取部から前記利用者までの水平距離と、前記生体情報読取部から当該生体情報読取部上にかざす手までの垂直距離とから視差を算出する算出部と、
前記算出部によって算出された視差に基づき、前記利用者の目の位置と前記生体情報読取部上にかざす手の位置との延長線上であって前記生体情報読取部が取り付けられた水平面上にマーカの位置を決定する決定部と、
前記決定部によって決定された位置のマーカに、手に関する生体情報を読み取る対象部分の中心を合わせるように指示する指示部と
を有することを特徴とする生体画像認証装置。
【0101】
(付記7)コンピュータに、
手に関する生体情報を非接触で読み取る生体情報読取部を斜めに見下ろした場合の利用者の目線の高さと、前記生体情報読取部から前記利用者までの水平距離と、前記生体情報読取部から当該生体情報読取部上にかざす手までの垂直距離とから視差を算出し、
該算出した視差に基づき、前記利用者の目の位置と前記生体情報読取部上にかざす手の位置との延長線上であって前記生体情報読取部が取り付けられた水平面上にマーカの位置を決定し、
該決定した位置のマーカに、手に関する生体情報を読み取る対象部分の中心を合わせるように指示する
処理を実行させる生体画像認証プログラム。
【0102】
(付記8)情報処理装置が生体画像を認証する生体画像認証方法であって、
手に関する生体情報を非接触で読み取る生体情報読取部を斜めに見下ろした場合の利用者の目線の高さと、前記生体情報読取部から前記利用者までの水平距離と、前記生体情報読取部から当該生体情報読取部上にかざす手までの垂直距離とから視差を算出し、
該算出した視差に基づき、前記利用者の目の位置と前記生体情報読取部上にかざす手の位置との延長線上であって前記生体情報読取部が取り付けられた水平面上にマーカの位置を決定し、
該決定した位置のマーカに、手に関する生体情報を読み取る対象部分の中心を合わせるように指示する
処理を含むことを特徴とする生体画像認証方法。
【符号の説明】
【0103】
1、2 生体画像認証装置
11 入力部
12 表示部
13 静脈センサ
14 記憶部
15 制御部
21 カメラ
141 身体情報テーブル
142 マーカ位置履歴テーブル
151、151B 視差算出部
151A 目線位置解析部
152 マーカ位置決定部
153 ガイダンス部
154 画像判定部
155 マーカ位置登録部
201 視差算出情報テーブル
【特許請求の範囲】
【請求項1】
手に関する生体情報を非接触で読み取る生体情報読取部と、
前記生体情報読取部を斜めに見下ろした場合の利用者の目線の高さと、前記生体情報読取部から前記利用者までの水平距離と、前記生体情報読取部から当該生体情報読取部上にかざす手までの垂直距離とから視差を算出する算出部と、
前記算出部によって算出された視差に基づき、前記利用者の目の位置と前記生体情報読取部上にかざす手の位置との延長線上であって前記生体情報読取部が取り付けられた水平面上にマーカの位置を決定する決定部と、
前記決定部によって決定された位置のマーカに、手に関する生体情報を読み取る対象部分の中心を合わせるように指示する指示部と
を有することを特徴とする電子装置。
【請求項2】
目線の高さおよび手に関する前記対象部分の中心から肘までの水平距離を含む身体情報を身長に対応付けて記憶する身体情報記憶部を有し、
前記算出部は、前記身体情報記憶部に記憶された身体情報に基づき、利用者の身長に対応付けられた目線の高さと肘から手に関する前記対象部分の中心までの距離と、前記垂直距離とから視差を算出することを特徴とする請求項1に記載の電子装置。
【請求項3】
前記決定部は、あらかじめ段階的な複数の位置に配置されたマーカの中から、決定した位置に対応するマーカを点灯することを特徴とする請求項1または請求項2に記載の電子装置。
【請求項4】
利用者を撮像する撮像部と、
前記撮像部によって撮像された画像から、前記利用者の目線の高さと前記生体情報読取部から前記利用者までの水平距離とを解析する解析部とをさらに有し、
前記算出部は、前記解析部によって解析された目線の高さと、前記生体情報読取部から前記利用者までの水平距離と、前記垂直距離とから視差を算出する
ことを特徴とする請求項1に記載の電子装置。
【請求項5】
手に関する生体情報を非接触で読み取る生体情報読取部と、
前記生体情報読取部を斜めに見下ろした場合の利用者の目線の高さと、前記生体情報読取部から前記利用者までの水平距離と、前記生体情報読取部から当該生体情報読取部上にかざす手までの垂直距離とから視差を算出する算出部と、
前記算出部によって算出された視差に基づき、前記利用者の目の位置と前記生体情報読取部上にかざす手の位置との延長線上であって前記生体情報読取部が取り付けられた水平面上にマーカの位置を決定する決定部と、
前記決定部によって決定された位置のマーカに、手に関する生体情報を読み取る対象部分の中心を合わせるように指示する指示部と
を有することを特徴とする生体画像認証装置。
【請求項6】
コンピュータに、
手に関する生体情報を非接触で読み取る生体情報読取部を斜めに見下ろした場合の利用者の目線の高さと、前記生体情報読取部から前記利用者までの水平距離と、前記生体情報読取部から当該生体情報読取部上にかざす手までの垂直距離とから視差を算出し、
該算出した視差に基づき、前記利用者の目の位置と前記生体情報読取部上にかざす手の位置との延長線上であって前記生体情報読取部が取り付けられた水平面上にマーカの位置を決定し、
該決定した位置のマーカに、手に関する生体情報を読み取る対象部分の中心を合わせるように指示する
処理を実行させる生体画像認証プログラム。
【請求項7】
情報処理装置が生体画像を認証する生体画像認証方法であって、
手に関する生体情報を非接触で読み取る生体情報読取部を斜めに見下ろした場合の利用者の目線の高さと、前記生体情報読取部から前記利用者までの水平距離と、前記生体情報読取部から当該生体情報読取部上にかざす手までの垂直距離とから視差を算出し、
該算出した視差に基づき、前記利用者の目の位置と前記生体情報読取部上にかざす手の位置との延長線上であって前記生体情報読取部が取り付けられた水平面上にマーカの位置を決定し、
該決定した位置のマーカに、手に関する生体情報を読み取る対象部分の中心を合わせるように指示する
処理を含むことを特徴とする生体画像認証方法。
【請求項1】
手に関する生体情報を非接触で読み取る生体情報読取部と、
前記生体情報読取部を斜めに見下ろした場合の利用者の目線の高さと、前記生体情報読取部から前記利用者までの水平距離と、前記生体情報読取部から当該生体情報読取部上にかざす手までの垂直距離とから視差を算出する算出部と、
前記算出部によって算出された視差に基づき、前記利用者の目の位置と前記生体情報読取部上にかざす手の位置との延長線上であって前記生体情報読取部が取り付けられた水平面上にマーカの位置を決定する決定部と、
前記決定部によって決定された位置のマーカに、手に関する生体情報を読み取る対象部分の中心を合わせるように指示する指示部と
を有することを特徴とする電子装置。
【請求項2】
目線の高さおよび手に関する前記対象部分の中心から肘までの水平距離を含む身体情報を身長に対応付けて記憶する身体情報記憶部を有し、
前記算出部は、前記身体情報記憶部に記憶された身体情報に基づき、利用者の身長に対応付けられた目線の高さと肘から手に関する前記対象部分の中心までの距離と、前記垂直距離とから視差を算出することを特徴とする請求項1に記載の電子装置。
【請求項3】
前記決定部は、あらかじめ段階的な複数の位置に配置されたマーカの中から、決定した位置に対応するマーカを点灯することを特徴とする請求項1または請求項2に記載の電子装置。
【請求項4】
利用者を撮像する撮像部と、
前記撮像部によって撮像された画像から、前記利用者の目線の高さと前記生体情報読取部から前記利用者までの水平距離とを解析する解析部とをさらに有し、
前記算出部は、前記解析部によって解析された目線の高さと、前記生体情報読取部から前記利用者までの水平距離と、前記垂直距離とから視差を算出する
ことを特徴とする請求項1に記載の電子装置。
【請求項5】
手に関する生体情報を非接触で読み取る生体情報読取部と、
前記生体情報読取部を斜めに見下ろした場合の利用者の目線の高さと、前記生体情報読取部から前記利用者までの水平距離と、前記生体情報読取部から当該生体情報読取部上にかざす手までの垂直距離とから視差を算出する算出部と、
前記算出部によって算出された視差に基づき、前記利用者の目の位置と前記生体情報読取部上にかざす手の位置との延長線上であって前記生体情報読取部が取り付けられた水平面上にマーカの位置を決定する決定部と、
前記決定部によって決定された位置のマーカに、手に関する生体情報を読み取る対象部分の中心を合わせるように指示する指示部と
を有することを特徴とする生体画像認証装置。
【請求項6】
コンピュータに、
手に関する生体情報を非接触で読み取る生体情報読取部を斜めに見下ろした場合の利用者の目線の高さと、前記生体情報読取部から前記利用者までの水平距離と、前記生体情報読取部から当該生体情報読取部上にかざす手までの垂直距離とから視差を算出し、
該算出した視差に基づき、前記利用者の目の位置と前記生体情報読取部上にかざす手の位置との延長線上であって前記生体情報読取部が取り付けられた水平面上にマーカの位置を決定し、
該決定した位置のマーカに、手に関する生体情報を読み取る対象部分の中心を合わせるように指示する
処理を実行させる生体画像認証プログラム。
【請求項7】
情報処理装置が生体画像を認証する生体画像認証方法であって、
手に関する生体情報を非接触で読み取る生体情報読取部を斜めに見下ろした場合の利用者の目線の高さと、前記生体情報読取部から前記利用者までの水平距離と、前記生体情報読取部から当該生体情報読取部上にかざす手までの垂直距離とから視差を算出し、
該算出した視差に基づき、前記利用者の目の位置と前記生体情報読取部上にかざす手の位置との延長線上であって前記生体情報読取部が取り付けられた水平面上にマーカの位置を決定し、
該決定した位置のマーカに、手に関する生体情報を読み取る対象部分の中心を合わせるように指示する
処理を含むことを特徴とする生体画像認証方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【公開番号】特開2013−47918(P2013−47918A)
【公開日】平成25年3月7日(2013.3.7)
【国際特許分類】
【出願番号】特願2011−186612(P2011−186612)
【出願日】平成23年8月29日(2011.8.29)
【出願人】(000005223)富士通株式会社 (25,993)
【Fターム(参考)】
【公開日】平成25年3月7日(2013.3.7)
【国際特許分類】
【出願日】平成23年8月29日(2011.8.29)
【出願人】(000005223)富士通株式会社 (25,993)
【Fターム(参考)】
[ Back to top ]