
電子走査型レーダ装置、受信波方向推定方法及び受信波方向推定プログラム
【課題】記憶するデータの記憶容量とデータ取得回数を増大することなく、検出精度を高めた方位検出ができる。
【解決手段】周波数分解処理部がビート信号を予め設定された周波数帯域幅を有するビート周波数に周波数分解して、ビート周波数毎に分解されたビート信号に基づいた複素数データを要素とする行列の特異値に基づいて受信波の波数を推定し、該推定された波数に応じた数の特異値に基づいて作成される信号部分空間によって示される信号部分空間の擬似逆行列に基づいた係数を生成し、該生成された係数に基づいて受信波の到来方向を算出する。
【解決手段】周波数分解処理部がビート信号を予め設定された周波数帯域幅を有するビート周波数に周波数分解して、ビート周波数毎に分解されたビート信号に基づいた複素数データを要素とする行列の特異値に基づいて受信波の波数を推定し、該推定された波数に応じた数の特異値に基づいて作成される信号部分空間によって示される信号部分空間の擬似逆行列に基づいた係数を生成し、該生成された係数に基づいて受信波の到来方向を算出する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、放射された送信波に対するターゲットからの反射波を用いて、このターゲットの検出を行う、車載用に好適な電子走査型レーダ装置、受信波方向推定方法及びこれに用いる受信波方向推定プログラムに関する。
【背景技術】
【0002】
従来、車載レーダとしては、FMCW(Frequency Modulated Continuous Wave)レーダ、多周波CW(Continuous Wave)レーダ、及びパルスレーダ等の方式を利用した電子走査型のレーダが知られている。
上記各レーダにおいては、ターゲット(反射物)からの到来波(あるいは受信波)の方向検知の技術として、アレーアンテナの到来波方向推定方法が用いられている。
この到来波方向推定方法は、近年、受信アンテナのチャンネル数を増やすことなく高い分解能が得られる、ARスペクトル推定法(図34)やMUSIC(MUltiple SIgnal Classification)法等の高分解能(高精度)アルゴリズムが用いられている(特許文献1、2、3参照)。また、ARスペクトル推定法は、最大エントロピー法(MEM:Maximum Entropy Method )や線形予測法などといわれる場合もある。
これらのアルゴリズムでターゲット(反射物)からの到来波方向推定を行う場合には、複素数によって示される入力データ(複素正弦波にノイズ成分が合成されたデータ)を相関行列といった行列形式に変換してから推定処理が行われる。
【0003】
また、車載レーダに用いられる高分解能到来波方向推定方法では、ノイズ成分を抑制し推定精度を向上させるために、過去の制御サイクルの相関行列を記憶しておき、今回の制御サイクルの相関行列との平均化(又は加算)処理をしてから方向推定処理を実行している。この相関行列の平均化処理は、少ないチャンネル数によって構成される車載用レーダにとって、方位検出精度(角度精度や分離性能)の向上に大きな効果を得ることができる(特許文献2)。
また、これらの高分解能アルゴリズムは、適当な到来波(受信波)数(ARスペクトル推定法の場合はモデル次数)を設定してから推定することが必要とされる(特許文献3)。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2006−275840号公報
【特許文献2】特開2009−156582号公報
【特許文献3】特開2009−162688号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ところで、特許文献2の技術において、推定精度を高めるためには、平均化するための相関行列数を多くすることが必要となる。平均するための相関行列数を増やすためには、過去の相関行列を保持しておく期間を長くして、複数の過去の相関行列を参照する回数を増やすか、同一制御サイクルにおけるデータ取得数を増やすことが必要となる。データ量については、1回のデータ取得で生成される相関行列そのものがデータ数×データ数個の大きさとなり、演算対象のデータ量は、データ取得数に応じて増加する。また、同一制御サイクルにおけるデータ取得数を増やすことは、FMCW方式の場合、同一制御サイクルにおける三角波出力回数を増加させることになる。このように、推定精度を高めるためにデータ量を増やした場合には、演算負荷が増大することが課題である。
また、ARスペクトル推定法は、比較的演算負荷の軽いアルゴリズムであり、距離方向に数多く存在するターゲットに対して方位推定処理も数多く行うことができるので、車載用レーダとして好適な手法である。また、ARスペクトル推定法は、MUSIC法と比べると受信波数(=モデル次数)の設定にセンシティブにならなくても推定できるという利点があり、モデル次数の高いほど推定精度が高くなるという傾向がある。
しかしながら、ARスペクトル推定法においては、設定次数に対して信号受信波数が大幅に少なくノイズ成分が多い場合には、相関行列(正規方程式)の平均を行い、精度を高めたとしても、偽ピークが検出されてしまう場合があることが懸案であった。
また、小型・低コスト化が必要とされる車載用レーダのような用途においては、受信系の構成を少ないチャンネル(CH)数にすることが要求され、少ないチャンネル(CH)数に適した設定とする場合では、設定できる次数が制限される。また、仮に受信系のCH数を増やすことができたとしても、上記のARスペクトル推定法(標準的ARスペクトル推定法と定義する)においては、次数を設定できるだけであることから、より高い次数の設定と、信号受信波数に応じた適切な設定を同時に満足させることができなかった。
【0006】
本発明は、このような事情に鑑みてなされたもので、取得するデータを記憶するメモリ容量とデータ取得回数を増大することなく、検出精度を高めた方位検出ができる電子走査型レーダ装置、受信波方向推定方法及び受信波方向推定プログラムを提供することを目的とする。
【課題を解決するための手段】
【0007】
(1)本発明は、移動体に搭載される電子走査型レーダ装置であり、送信された送信波を反射したターゲットから到来する受信波を受信する複数のアンテナを含んで構成される受信部と、前記送信波及び前記受信波からビート信号を生成するビート信号生成部と、前記ビート信号を予め設定された周波数帯域幅を有するビート周波数に周波数分解して、前記ビート周波数毎に分解された前記ビート信号に基づいた複素数データを算出する周波数分解処理部と、前記ビート信号に基づいて算出された複素数データに基づいて生成される行列から算出される特異値に基づいて前記受信波の波数を推定し、該推定された波数により定められる信号部分空間に含まれる該行列の擬似逆行列に基づいて算出される係数に基づいて前記受信波の到来方向を算出する方位検出部とを備えることを特徴とする電子走査型レーダ装置である。
【0008】
(2)また、本発明は、上記発明において、前記方位検出部は、前記ビート信号に基づいて算出された前記複素数データに基づいて前記係数を算出する第1演算処理部を備え、前記第1演算処理部は、前記ビート信号に基づいて算出された前記複素数データに基づいて前記行列及びベクトルを生成するデータ行列データベクトル生成部と、前記生成した行列を特異値分解することにより前記特異値を算出する特異値分解部と、前記算出された特異値に基づいて前記受信波の波数を推定した波数推定値を算出する波数推定部と、該算出された波数推定値により定められる前記信号部分空間に含まれる前記擬似逆行列を算出する擬似逆行列算出部と、前記信号部分空間の擬似逆行列及び前記ベクトルから前記係数を算出する係数算出部とを備えることを特徴とする。
【0009】
(3)また、本発明は、上記発明において、前記方位検出部は、前記算出された複素数データを元にして、該元の複素数データよりデータ数を拡張した拡張複素数データを生成するデータ拡張部を備え、前記データ行列データベクトル生成部は、前記拡張複素数データを要素とする前記行列及び前記ベクトルを生成することを特徴とする。
【0010】
(4)また、本発明は、上記発明において、前記データ行列データベクトル生成部は、前記行列及び前記ベクトルとして、予め定められる次数に増加させた次数増加行列及び次数増加ベクトルを生成することを特徴とする。
【0011】
(5)また、本発明は、上記発明において、前記データ行列データベクトル生成部は、前記行列及び前記ベクトルとして、前記拡張複素数データによる次数を増加させずに、前記拡張複素数データのデータ数を拡張した前記行列及び前記ベクトルを生成することを特徴とする。
【0012】
(6)また、本発明は、上記発明において、前記方位検出部は、前記拡張複素数データを生成する際に元とする前記係数を、前記元の複素数データに基づいて作成される正規方程式により生成することを特徴とする。
【0013】
(7)また、本発明は、上記発明において、前記方位検出部は、前記拡張複素数データを生成する際に元とする前記係数を、前記元の複素数データに基づいて作成された前記正規方程式により生成する第2演算処理部を備え、前記データ拡張部は、前記元の複素数データと前記係数に基づいた線形予測式により前記拡張複素数データを生成することを特徴とする。
【0014】
(8)また、本発明は、上記発明において、前記係数は、自己回帰モデルを用いるスペクトル推定法において、該自己回帰モデルを示す線形方程式に基づいて算出されることを特徴とする。
【0015】
(9)また、本発明は、上記発明において、前記データ拡張部は、前記受信波の到来方向を算出する処理を繰り返し行う検知サイクルにおける、今回の検知サイクルにおいて算出された前記係数に基づいて前記拡張複素数データを生成することを特徴とする。
【0016】
(10)また、本発明は、上記発明において、前記ターゲットに対応付けられた情報を、前記検知サイクルの回数に対応付けて記憶する記憶部を備え、前記データ拡張部は、前記ターゲットに対応付けられた情報として前記記憶部に記憶されており、前記今回の検知サイクルより過去に行われた過去の検知サイクルにおいて算出された前記係数に基づいて前記拡張複素数データを生成することを特徴とする。
【0017】
(11)また、本発明は、上記発明において、前記データ拡張部は、前記今回の検知サイクルにおいて算出された前記元の複素数データと、前記ターゲットに対応付けられた情報として前記記憶部に記憶されており、前記今回の検知サイクルより過去に行われた過去の検知サイクルにおいて算出された過去の複素数データとに基づいて前記拡張複素数データを生成することを特徴とする。
【0018】
(12)また、本発明は、上記発明において、前記今回の検知サイクルと、前記過去の検知サイクルとにおいて、それぞれ検知された前記ターゲットを関連付け、前記関連付けられたターゲットに対応付けられた情報を前記記憶部に記憶させるターゲット連結処理部を備えることを特徴とする。
【0019】
(13)また、本発明は、上記発明において、前記ターゲット連結処理部は、前記今回及び前記過去の検知サイクルにおける前記ターゲットの関連付けを、距離及び相対速度、又は、距離、相対速度及び方位により行うことを特徴とする。
【0020】
(14)また、本発明は、上記発明において、前記方位検出部は、前記ターゲットに対応付けられた前記情報である前記係数を平均する係数フィルタ部を備えることを特徴とする。
【0021】
(15)また、本発明は、上記発明において、前記係数フィルタ部は、前記第1演算処理部によって算出され、前記ターゲットに対応付けられた前記係数を平均する第1係数フィルタ部を備えることを特徴とする。
【0022】
(16)また、本発明は、上記発明において、前記係数フィルタ部は、前記第2演算処理部によって算出され、前記ターゲットに対応付けられた前記係数を平均する第2係数フィルタ部を備えることを特徴とする。
【0023】
(17)また、本発明は、上記発明において、前記ビート周波数の強度値からピーク値を検出して前記ターゲットの存在を検知するピーク検知部を備え、前記方位検出部は、前記ピーク検知部によって存在が検知されたターゲットに対応する前記複素数データに基づいて、前記受信波の到来方向を算出することを特徴とする。
【0024】
(18)また、本発明は、上記発明において、前記複素数データに基づいて、前記受信波を受信する所望の方向の受信感度を高めるデジタルビームフォーミングに基づいて前記ターゲットの存在及び方位を検出するDBF部をさらに備え、前記ピーク検知部は、前記今回の検知サイクルにおけるビート周波数における前記デジタルビームフォーミングに基づいて前記ターゲットの方位を検出することを特徴とする。
【0025】
(19)また、本発明は、移動体に搭載される電子走査型レーダ装置による受信波方向推定方法であり、受信部が、送信された送信波を反射したターゲットから到来する受信波を受信する複数のアンテナを含んで構成される受信過程と、ビート信号生成部が前記送信波及び前記受信波からビート信号を生成するビート信号生成過程と、周波数分解処理部が前記ビート信号を予め設定された周波数帯域幅を有するビート周波数に周波数分解して、前記ビート周波数毎に分解された前記ビート信号に基づいた複素数データを算出する周波数分解処理過程と、前記ビート信号に基づいて算出された複素数データに基づいて生成される行列から算出される特異値に基づいて前記受信波の波数を推定し、該推定された波数により定められる信号部分空間に含まれる該行列の擬似逆行列に基づいて算出される係数に基づいて前記受信波の到来方向を算出する方位検出過程とを含むことを特徴とする受信波方向推定方法である。
【0026】
(20)また、本発明は、移動体に搭載される電子走査型レーダ装置により受信波方向推定の処理をコンピュータに実行させるためのプログラムであり、送信された送信波を反射したターゲットから到来する受信波を受信する複数のアンテナを含んで構成される受信処理手順と、前記送信波及び前記受信波からビート信号を生成するビート信号生成処理手順と、前記ビート信号を予め設定された周波数帯域幅を有するビート周波数に周波数分解して、前記ビート周波数毎に分解された前記ビート信号に基づいた複素数データを算出する周波数分解処理手順と、前記ビート信号に基づいて算出された複素数データに基づいて生成される行列から算出される特異値に基づいて前記受信波の波数を推定し、該推定された波数により定められる信号部分空間に含まれる該行列の擬似逆行列に基づいて算出される係数に基づいて前記受信波の到来方向を算出する方位検出手順とを実行させるためのプログラムである。
【発明の効果】
【0027】
以上説明したように、本発明によれば、受信部が、送信された送信波を反射したターゲットから到来する受信波を受信する複数のアンテナを含んで構成される。ビート信号生成部が前記送信波及び前記受信波からビート信号を生成する。周波数分解処理部が、前記ビート信号を予め設定された周波数帯域幅を有するビート周波数に周波数分解して、前記ビート周波数毎に分解された前記ビート信号に基づいた複素数データを算出する。方位検出部が、ビート信号に基づいて算出された複素数データに基づいて生成される行列の特異値に基づいて受信波の波数を推定し、該推定された波数に応じた数の特異値に基づいて作成される信号部分空間によって示される信号部分空間成分の擬似逆行列に基づいた係数を生成し、該生成された係数に基づいて受信波の到来方向を算出する。
これにより、方位検出部は、ターゲットの存在が検知されたビート周波数である検出ビート周波数の複素数データに基づいて生成される行列の特異値に基づいて到来波の波数を推定し定める。方位検出部は、推定された波数に応じた特異値に基づいて作成される信号部分空間の擬似逆行列に基づいた係数により受信波の到来方向を算出するので、検出精度を高めた方位検出ができる電子走査型レーダ装置及び受信波方向推定プログラムを提供することが可能となる。
【図面の簡単な説明】
【0028】
【図1】本発明の第1実施形態による電子走査型レーダ装置の構成を示すブロック図である。
【図2】送信信号と、ターゲットに反射された受信信号が入力された状態を示す図である。
【図3】受信アンテナにおける受信波の説明を行う概念図である。
【図4】ビート信号を周波数分解した結果であり、ビート周波数(横軸)とそのピーク値(縦軸)とを示すグラフである。
【図5】ピーク組合せ部24における上昇領域及び下降領域のビート周波数のマトリクスと、そのマトリクスの交点、すなわち上昇領域及び下降領域のビート周波数の組み合わせにおける距離及び相対速度とピークレベルとを示すテーブルである。
【図6】今回の検知サイクルにおけるピークのペアを確定したターゲット群毎の距離及び相対速度と周波数ポイントを示すテーブルである。
【図7】本実施形態における方位検出部の構成を示すブロック図である。
【図8】検知サイクルにおけるデータ取得処理を示すタイムチャートである。
【図9】本実施形態に適用するデータ拡張法について示す図である。
【図10】複素数データを拡張する処理について示す図である。
【図11】MFBLP法におけるデータ行列とデータベクトルの生成と擬似逆行列で表現できることを示す図である。
【図12】特異値分解の演算処理を示す図である。
【図13】信号部分空間の擬似逆行列A#から算出されるAR係数aから、白色雑音の分散値とパワースペクトルを求める演算処理を示す図である。
【図14】メモリ21に設けられるテーブルを示す図である。
【図15】AR係数の記憶方法、呼出方法を示す図である。
【図16】本実施形態の処理を示すフローチャートである。
【図17】図16のステップSa106からステップSa108までに示した信号波数推定処理の詳細を示す図(その1)である。
【図18】図16のステップSa106からステップSa108までに示した信号波数推定処理の詳細を示す図(その2)である。
【図19】AR係数の初期値を定める処理の手順を示すフローチャートである。
【図20】第2実施形態によるAR係数の初期値を定める処理の手順を示すフローチャートである。
【図21】第3実施形態による電子走査型レーダ装置の構成例を示すブロック図である。
【図22】MFBLP法におけるAR係数の平均化処理を示す図である。
【図23】FBLP法におけるAR係数の平均化処理を示す図である。
【図24】メモリ21に設けられるテーブルを示す図である。
【図25】本実施形態の処理を示すフローチャートである。
【図26】第4実施形態の方位検出部の構成を示すブロック図である。
【図27】本実施形態の処理を示すフローチャートである。
【図28】第5実施形態による電子走査型レーダ装置の構成例を示すブロック図である。
【図29】上昇領域及び下降領域それぞれのピークを組み合わせるためのテーブルを示す図である。
【図30】第6実施形態による電子走査型レーダ装置の構成例を示すブロック図である。
【図31】上昇領域及び下降領域それぞれのピークのペアを確定した結果を記憶するテーブルである。
【図32】本実施形態による電子走査型レーダ装置の方位推定特性の効果を示す図(その1)である。
【図33】本実施形態による電子走査型レーダ装置の方位推定特性の効果を示す図(その2)である。
【図34】従来のARスペクトル推定処理を示す図である。
【発明を実施するための形態】
【0029】
<ARスペクトル推定の説明>
以下、本発明の実施形態に適用するARスペクトル推定法について示す。
最初に、標準的なARスペクトル推定法(AR Spectral Estimation)について示す。ARスペクトル推定法は、MUSIC法と同じくスペクトルを推定するスペクトル推定法として知られており、ARモデル(Autoregressive Model:自己回帰モデル)を用いた推定処理を行う方法である。このようなARスペクトル推定法は、MUSIC法が部分空間法として分類される場合に、パラメトリック法として分類される。また、ARスペクトル推定法は、最大エントロピー法、線形予測法と呼ばれる場合もある。
【0030】
ARスペクトル推定法は、まず線形式によって示されるARモデルを用いてモデル化して、入力データに基づいた線形式である正規方程式(自己相関行列や共分散行列と呼ばれる行列と、右辺ベクトルや相互相関ベクトルと呼ばれるベクトルも含まれる)を作成する。さらに、正規方程式に基づいて、ARフィルタの係数(AR係数)と入力白色雑音の分散値を求めた後、そのAR係数と入力白色雑音の分散値を用いてパワースペクトルを求め推定する手法である(図34参照)。入力データには、時系列のデータの他、本実施形態におけるレーダのような空間方向のチャンネルデータに対しても適用できる。このようなARスペクトル推定法は、自己相関行列を用いた手法と共分散行列を用いた手法に大別され、自己相関行列を用いた手法として自己相関法(Autocorrelation Method)(又は、ユールウォーカー法)とバーグ法(Burg Method)があり、共分散行列を用いた方法として共分散法(Covariance Method)と改良共分散法(Modified Covariance Method)がある。また、改良共分散法は、前向き後向き線形予測法(Forward and Backward Linear Prediction Method、FBLP法)とも呼ばれる。
上記のARスペクトル推定法(以下、「標準的なARスペクトル推定法」という)は、固有値分解を行わないので、演算負荷が比較的軽いことが特色である。
【0031】
ところで、本実施形態に示すARスペクトル推定法においては、検出した信号を信号部分空間とノイズ部分空間とに分離して検出処理を行う。ARスペクトル推定法において、その信号部分空間を抽出することにより、ARモデルの次数を固定値にしていても、受信信号波数に応じたスペクトル推定処理における検出特性を適応させることができる。
このようなARスペクトル推定法において、標準的な改良共分散法(共分散法)に用いるデータ列によって示されるMFBLP法(Modified Forward and Backward Linear Prediction Method:改良前向き後向き線形予測法)を適用する[参考文献:Tufts, Kumaresan, " Estimation of Frequency of Multiple Sinusoids : Making Linear Prediction Perform Like Maximum Likelihood", IEEE Vol.70, No.9, September 1982.を参照]。このMFBLP法は、パラメトリック法と部分空間法とを組み合わせるような手法である。ARスペクトル推定法において、MFBLP法を適用することにより、共分散行列と右辺ベクトルを作成することなく、データ行列とデータベクトルから直接特異値分解を行い、疑似逆行列を求める。
なお、信号部分空間の抽出は、信号部分空間に含まれる該行列の疑似逆行列の作成により行う。
このように、本実施形態に示すARスペクトル推定法は、設定次数に対して信号受信波数が少なくノイズ成分が多い場合であっても、偽ピークの発生を低減させることができるので、ARスペクトル推定における推定精度を高めるよう、次数を増加させることが可能である。
【0032】
(第1実施形態)
以下、本発明の実施形態による電子走査型レーダ装置(FMCW方式ミリ波レーダ)について図面を参照して説明する。
図1は、同実施形態における電子走査型レーダ装置の構成を示すブロック図である。
この図において、本実施形態による電子走査型レーダ装置は、受信アンテナ1−1〜1−n、ミキサ2−1〜2−n、送信アンテナ3、分配器4、フィルタ5−1〜5―n、SW(スイッチ)6、ADC(A/Dコンバータ)7、制御部8、三角波生成部9、VCO10、信号処理部20Aを備える。
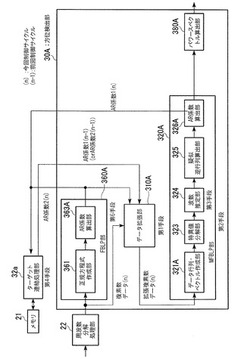
信号処理部20Aは、メモリ21、周波数分離処理部22、ピーク検知部23、ピーク組合せ部24、距離検出部25、速度検出部26、ペア確定部27、方位検出部30、ターゲット確定部31、及び、ターゲット連結処理部32を備える。
【0033】
次に、図1を参照して、本実施形態による電子走査型レーダ装置の動作を説明する。
受信アンテナ1−1〜1−nは、送信波がターゲットにて反射し、このターゲットから到来する反射波、すなわち受信波を受信する。
ミキサ2−1〜2−nは、送信アンテナ3から送信される送信波と、受信アンテナ1−1〜1−nそれぞれにおいて受信された受信波が増幅器により増幅された信号とを混合して、それぞれの周波数差に対応したビート信号を生成する。
送信アンテナ3は、三角波生成部9において生成された三角波信号を、VCO(Voltage Controlled Oscillator )10において周波数変調した送信信号をターゲットに対して送信波として送信する。
分配器4は、VCO10からの周波数変調された送信信号を、ミキサ2−1〜2−n及び送信アンテナ3に分配する。
【0034】
フィルタ5−1〜5−n各々は、それぞれミキサ2−1〜2−nにおいて生成された各受信アンテナ1−1〜1−nに対応したCh1〜Chnのビート信号に対して帯域制限を行い、SW(スイッチ)6へ帯域制限されたビート信号を出力する。
SW6は、制御部8から入力されるサンプリング信号に対応して、フィルタ5−1〜5−n各々を通過した各受信アンテナ1−1〜1−nに対応したCh1〜Chnのビート信号を、順次切り替えて、ADC(A/Dコンバータ)7に出力する。
ADC7は、SW6から上記サンプリング信号に同期して入力される、各受信アンテナ1−1〜1−n各々に対応したCh1〜Chnのビート信号を、上記サンプリング信号に同期してA/D変換してデジタル信号に変換し、信号処理部20におけるメモリ21の波形記憶領域に順次記憶させる。
制御部8は、マイクロコンピュータなどにより構成されており、図示しないROMなどに格納された制御プログラムに基づき、図1に示す電子走査型レーダ装置全体の制御を行う。
【0035】
<距離、相対速度、角度(方位)を検出する原理>
次に、図を参照し、本実施形態における信号処理部20において用いられる電子走査型レーダ装置とターゲットとの距離、相対速度、角度(方位)を検出する原理について簡単に説明する。
図2は、送信信号と、ターゲットに反射された受信信号が入力された状態を示す図である。
この図に示される信号は、図1の三角波生成部9において生成された信号をVCO10において周波数変調した送信信号と、その送信信号をターゲットが反射して、受信された受信信号である。この図の例では、ターゲットが1つの場合を示す。
図2(a)から判るように、送信する信号に対し、ターゲットからの反射波である受信信号が、ターゲットとの距離に比例して右方向(時間遅れ方向)に遅延されて受信される。さらに、ターゲットとの相対速度に比例して、送信信号に対して上下方向(周波数方向)に変動する。そして、図2(a)にて求められたビート信号の周波数変換(フーリエ変換(FFT)やDTC、アダマール変換、ウェーブレッド変換など)後において、図2(b)に示されるように、ターゲットが1つの場合、上昇領域及び下降領域それぞれに1つのピーク値を有することなる。ここで、図2(a)は横軸が周波数、縦軸が強度を示す。
【0036】
周波数分解処理部22は、メモリ21に蓄積されたビート信号のサンプリングされたデータから、三角波の上昇部分(上り)と下降部分(下り)とのそれぞれについて周波数分解、例えばフーリエ変換などにより離散時間に周波数変換する。すなわち、周波数分解処理部22は、ビート信号を予め設定された周波数帯域幅を有するビート周波数に周波数分解して、ビート周波数毎に分解されたビート信号に基づいた複素数データを算出する。
その結果、図2(b)に示すように、上昇部分と下降部分とにおいて、それぞれの周波数分解されたビート周波数毎の信号レベルのグラフが得られる。
そして、ピーク検知部23は、図2(b)に示すビート周波数毎の信号レベルからピーク値を検出し、ターゲットの存在を検出するとともに、ピーク値のビート周波数(上昇部分及び下降部分の双方)をターゲット周波数として出力する。
【0037】
次に、距離検出部25は、ピーク組合せ部24から入力される上昇部分のターゲット周波数fuと、下降部分のターゲット周波数fdとから、下記式により距離rを算出する。式中の「・」は、乗算を示す。
r={C・T/(2・Δf)}・{(fu+fd)/2}
また、速度検出部26は、ピーク組合せ部24から入力される上昇部分のターゲット周波数fuと、下降部分のターゲット周波数fdとから、下記式により相対速度vを算出する。
v={C/(2・f0)}・{(fu−fd)/2}
上記距離r及び相対速度vを算出する式において、
C :光速度
Δf:三角波の周波数変調幅
f0 :三角波の中心周波数
T :変調時間(上昇部分/下降部分)
fu :上昇部分におけるターゲット周波数
fd :下降部分におけるターゲット周波数
【0038】
次に、本実施形態における受信アンテナ1−1〜1−nについて示す。
図3は、受信アンテナにおける受信波の説明を行う概念図である。
この図に示されるように、受信アンテナ1−1〜1−nは、間隔dによりアレー状に配置される。受信アンテナ1−1〜1−nには、アンテナを配列している面に対する垂直方向の軸に対して角度θ方向から入射される、ターゲットからの到来波(入射波、すなわち送信アンテナ3から送信した送信波に対するターゲットからの反射波)が入力する。このとき、その到来波は、受信アンテナ1−1〜1−nにおいて同一角度にて受信される。この同一角度、例えば角度θ及び各アンテナの間隔dにより求められる位相差「dn−1・sinθ」が、各隣接する受信アンテナ間にて発生する。
その位相差を利用して、アンテナ毎に時間方向に周波数分解処理された値を、アンテナ方向にさらにフーリエ変換するデジタルビームフォーミング(DBF)や高分解能アルゴリズム等の信号処理にて上記角度θを検出することができる。
【0039】
<信号処理部20における受信波に対する信号処理>
次に、信号処理部20Aにおける受信波に対する信号処理について示す。
メモリ21は、波形記憶領域が設けられている。メモリ21は、ADC7によってA/D変換された受信信号の時系列データ(上昇部分及び下降部分)を、アンテナ1−1〜1−n毎に対応させて、上記波形記憶領域に記憶している。例えば、上昇部分及び下降部分それぞれにおいて256個をサンプリングした場合、2×256個×アンテナ数のデータが、上記波形記憶領域に記憶される。
周波数分解処理部22は、例えばフーリエ変換などにより、各Ch1〜Chn(各アンテナ1−1〜1−n)に対応するビート信号それぞれを、予め設定された分解能に応じて周波数成分に変換することによりビート周波数を示す周波数ポイントと、そのビート周波数の複素数データを出力する。例えば、アンテナ毎に上昇部分及び下降部分それぞれが256個のサンプリングされたデータを有する場合、アンテナ毎の複素数の周波数領域データとしてビート周波数に変換され、上昇部分及び下降部分それぞれにおいて128個の複素数データ(2×128個×アンテナ数のデータ)となる。また、上記ビート周波数は周波数ポイントにて示されている。
ここで、アンテナ毎の複素数データには、上記角度θに依存した位相差があり、それぞれの複素数データの複素平面上における絶対値(受信強度あるいは振幅など)は等価である。
【0040】
ピーク検知部23は、周波数変換されたビート周波数の三角波の上昇領域及び下降領域それぞれ強度のピーク値を、複素数データを用いて信号強度(または振幅など)におけるピークから、予め設定された数値を超えるピーク値を有するビート周波数を検出することにより、ビート周波数毎のターゲットの存在を検出して、ターゲット周波数を選択する。
したがって、ピーク検知部23は、いずれかのアンテナにおける複素数データ又は、全アンテナの複素数データの加算値を周波数スペクトル化することにより、スペクトルの各ピーク値がビート周波数、すなわち距離に依存したターゲットの存在として検出することができる。全アンテナの複素数データの加算により、ノイズ成分が平均化されてS/N比が向上する。
【0041】
ピーク組合せ部24は、ピーク検知部23から入力される図4に示すビート周波数とそのピーク値について、上昇領域及び下降領域それぞれのビート周波数とそのピーク値をマトリクス状に総当たりにて組み合わせ、すなわち上昇領域及び下降領域それぞれのビート周波数を全て組み合わせて、順次、距離検出部25及び速度検出部26へ出力する。ここで、図4は、横軸がビート周波数の周波数ポイントを示し、縦軸が信号のレベル(強度)を示している。
距離検出部25は、順次入力される上昇領域及び下降領域それぞれの組み合わせのビート周波数を加算した数値によりターゲットとの上記距離rを演算する。
また、速度検出部26は、順次入力される上昇領域及び下降領域それぞれの組み合わせのビート周波数の差分によりターゲットとの上記相対速度vを演算する。
【0042】
ペア確定部27は、入力される上記距離r、相対速度v及び下降、上昇のピーク値レベルpu、pdにより、図5に示すテーブルを生成し、ターゲット毎に対応した上昇領域及び下降領域それぞれのピークの適切な組み合わせを判定し、図6に示すテーブルとして上昇領域及び下降領域それぞれのピークのペアを確定し、確定した距離r及び相対速度vを示すターゲット群番号をターゲット確定部31へ出力する。そして、周波数分解処理部22に、ペアが確定した周波数ポイントを送り、方位検出部60へ送る複素数データを決定する。図6にはターゲット群番号に対応して、距離、相対速度及び周波数ポイント(上昇領域及又は下降領域)が記憶されている。図5及び図6のテーブルは、ペア確定部27の内部記憶部に記憶されている。ここで、各ターゲット群は、方向が決定されていないため、電子走査型レーダ装置におけるアンテナアレーの配列方向に対する垂直軸に対して、受信アンテナ1−1〜1−nの配列方向に平行な横方向の位置は決定されていない。
【0043】
ここで、ペア確定部27は、例えば、過去の検知サイクルにて、最終的に確定した各ターゲットとの距離r及び相対速度vから今回の検知サイクルにて予測される値を優先してターゲット群の組み合わせの選択を行う等の手法を用いることもできる。
【0044】
ターゲット確定部31は、ペア確定部27から入力される図6の距離r、相対速度v、周波数ポイントと、方位検出部30によって検出されたターゲットの方位とを結びつけた後、ターゲット連結処理部32へ出力する。
ターゲット連結処理部32は、メモリ21に記憶されている過去の検知サイクルにおけるターゲットを結びつけた後、ターゲット毎に過去検知サイクル(図8)において記録されたAR係数を方位検出部30へ出力する。
また、ターゲット連結処理部32は、今回検知サイクル(図8)において算出されたAR係数に対して、ターゲット確定部31から出力される距離、相対速度及び方位の識別情報を付して、メモリ21に記録する。
【0045】
方位検出部30は、高分解能アルゴリズムのARスペクトル推定処理によるスペクトル推定処理を行い、そのスペクトル推定処理の結果に基づいて対応するターゲットの方位を検出して、ターゲット確定部31へ出力する。
このような方位検出部30は、ビート信号に基づいて算出された複素数データであって、データ数を拡張させた拡張複素数データを生成する。方位検出部30は、その拡張複素数データを要素とするデータ行列の特異値に基づいて受信波の波数を推定する。また、方位検出部30は、該推定された波数に応じた個数の特異値に基づいて作成される信号部分空間によって示される信号部分空間の擬似逆行列に基づいたAR係数を生成し、該生成されたAR係数に基づいて受信波の到来方向を算出する。
また、方位検出部30が生成する拡張複素数データは、今回検知サイクルにおいて取得された複素数データ及び今回の検知サイクルにて算出されるAR係数と、過去検知サイクルにおいて取得されたビート信号に基づいて算出されたAR係数とに基づいて生成される。
ターゲット確定部31は、ペア確定部27から入力される図6の距離r、相対速度v、周波数ポイントと、方位検出部30によって検出されたターゲットの方位とを結びつけて現在の状態を確定し出力する。
【0046】
以下、スペクトル推定処理において高分解能アルゴリズムとして知られるARスペクトル推定法を用いる場合の構成例について、より具体的に示す。
図7は、本実施形態における方位検出部の構成を示すブロック図である。
図7に示される方位検出部30Aとターゲット連結処理部32aとは、図1に示した方位検出部30とターゲット連結処理部32との一態様である。
方位検出部30Aは、データ拡張部310A、MFBLP部320A、FBLP部360A、及び、パワースペクトル算出部380Aを備える。
【0047】
データ拡張部310Aは、受信波の到来方向を算出する処理を繰り返し行う検知サイクルにおける今回の検知サイクルにおいて取得された複素数データ、及び、過去の検知サイクルにおいて算出されたAR係数から、データ数を増加させた拡張複素数データを生成する。
なお、今回の検知サイクルにおいて取得された複素数データ(n)は、周波数分解処理部22が周波数分解したビート周波数(上昇と下降のいずれか又は両方)に応じた複素数データである。
また、データ拡張部310AにおけるAR係数(n−1)は、後述のMFBLP部320Aによって過去の制御サイクルにおいて算出されたものである。MFBLP部320Aによって、今回の制御サイクルにおいて算出されたAR係数をAR係数1(n)として示すと、過去(前回)の制御サイクルにおいて算出されたAR係数は、AR係数1(n−1)として示される。
データ拡張部310Aは、受信波の到来方向を算出する処理を繰り返し行う検知サイクルにおける今回の検知サイクルにおいて取得された複素数データ、及び、今回の検知サイクルにおいて算出されたAR係数と、過去の検知サイクルにおいて算出されたAR係数とから、データ数を増加させた拡張複素数データ(n)を生成する。
データ拡張部310Aは、データ数を拡張する元の複素数データ(n)に基づいて設定可能な第2の次数(M)より増加させ、拡張複素数データを生成する。
【0048】
なお、新規(最初)に検知したターゲットの制御サイクルにおいては、データ拡張部310AにおけるAR係数は、後述のFBLP部360によって、新規にターゲットを検知した制御サイクルにおいて算出されたものである。FBLP部360によって新規にターゲットを検知した制御サイクルにおいて算出されたAR係数をAR係数2(n)として示すと、新規にターゲットを検知した次(2回目)の制御サイクルにおいて算出されたAR係数は、AR係数2(n−1)として示され(ただし、nは2である)、2回目の制御サイクルにおいて読み出される。
データ拡張部310Aは、過去の検知サイクルにおいて算出されたAR係数として、新規にターゲットを検知した検知サイクルにおいては、FBLP部360Aによって生成されたAR係数2(n)(ただし、n=1)に基づき、2回目の検知サイクルにおいては、同じAR係数2(n)をAR係数2(nー1)にした係数に基づき、3回目以降の検知サイクルにおいては、MFBLP部320Aによって生成されたAR係数1(n−1)に基づいてデータ拡張する。
【0049】
MFBLP部320A(第1演算処理部)は、拡張複素数データ(n)から作成したデータ行列とデータベクトルに基づいて、第1の次数のAR係数(AR係数1(n))と白色雑音の分散値とを算出する。
このようなMFBLP部320Aは、データ行列・ベクトル作成部321A、特異値分解部323、波数推定部324、擬似逆行列算出部325、及び、AR係数算出部326Aを備える。
【0050】
データ行列・ベクトル作成部321Aは、「今回検知サイクル」において、データ拡張部310Aによってデータ拡張された拡張複素数データから導かれるデータ行列とデータベクトルを作成する。
【0051】
特異値分解部323は、「今回検知サイクル」において導かれたデータ行列に基づいて特異値分解処理を行い、特異値を算出する。
【0052】
波数推定部324は、特異値分解部323による特異値分解処理により算出された特異値から最大の値を示す特異値を判定する。波数推定部324は、それぞれ算出された特異値を、算出された特異値の最大の値に基づいて正規化する。波数推定部324は、正規化された特異値を予め定められる閾値に基づいて判定し、その判定結果に基づいて後段の処理の波数を選択する。
【0053】
擬似逆行列算出部325は、特異値分解部323により算出された特異値から、波数推定部324において判定された波数に応じて定められる信号部分空間の疑似逆行列を作成する。この信号部分空間の疑似逆行列を波数推定部324において判定された波数に応じて作成することにより、ノイズ成分を除去することができる。
【0054】
AR係数算出部326Aは、擬似逆行列算出部325によって作成された信号部分空間の疑似逆行列と、データ行列・ベクトル作成部321Aによって、「今回検知サイクル」において導かれたデータ行列とから、AR係数と、入力白色雑音の分散σ2を算出する。このように、AR係数算出部326Aは、検知サイクルに応じて、ターゲットの存在が検知されたビート周波数である検出ビート周波数の複素数データに基づいたAR係数と、入力白色雑音の分散σ2を導くことができる。また、AR係数算出部326Aは、パワースペクトル算出部380Aへ、導かれたAR係数(AR係数1(n))と入力白色雑音の分散σ2を出力する。また、AR係数算出部326Aは、ターゲット連結処理部32aに、導かれたAR係数1(n)を出力する。
パワースペクトル算出部380Aは、そのAR係数1(n)と入力白色雑音の分散σ2に基づいて導かれるパワースペクトルから受信波の到来方向を算出する。
【0055】
FBLP部360A(第2演算処理部)は、複素数データ(n)から作成した正規方程式に基づいて、第2の次数のAR係数(AR係数2(n))を算出する。
このようなFBLP部360Aは、正規方程式作成部361及びAR係数算出部363Aを備える。
正規方程式作成部361は、周波数分解処理部22が周波数分解したビート周波数(上昇と下降のいずれか又は両方)に応じた複素数データのそれぞれから導かれ、ARスペクトル推定における第2の次数の正規方程式を作成する。
【0056】
AR係数算出部363Aは、正規方程式作成部361によって作成された「今回検知サイクル」における第2の次数の正規方程式から導かれる第2の次数のAR係数(AR係数2(n))を算出する。このように、AR係数算出部363Aは、今回検知サイクルにおいて検知された受信波によるビート周波数に応じた複素数データに基づいて算出される第2の次数のAR係数を得、後段のデータ拡張のための係数とする。
また、AR係数算出部363Aは、ターゲット連結処理部32aへ、導かれたAR係数(AR係数2(n))を出力する。
【0057】
なお、本実施形態において、データ拡張部310Aが第1手段として機能する。データ行列・ベクトル作成部321A、特異値分解部323、擬似逆行列算出部325及びAR係数算出部326Aが第2手段として機能する。波数推定部324が第3手段として機能する。ターゲット連結処理部32aが第4手段として機能する。FBLP部360が第6手段として機能する。
【0058】
図8は、検知サイクルにおけるデータ取得処理を示すタイムチャートである。
図8には、今回制御(検知)サイクルからさかのぼって、過去に行われた過去制御(検知)サイクルが示されている。
各サイクルでは、1回のデータ取得が行われ、その1回のデータ取得を三角の波形で示す。三角の波形は、FMCW方式によって変調された信号を示し、右上がりのタイミングにおいて上り、右下がりのタイミングにおいて下りの検知が行われる。
また、現在データ取得されている制御(検知)サイクルを「今回制御(検知)サイクル」といい、「今回制御(検知)サイクル」より過去に行われた制御(検知)サイクルを「過去制御(検知)サイクル」という。
【0059】
<ARモデルを用いた正規方程式の作成処理の原理>
次に、ARモデルを用いた正規方程式の作成処理について、改良共分散法(前向き後向き線形予測法)を例にして詳細に示す。
共分散行列を用いた正規方程式を式(1)に示す。
【0060】
【数1】

【0061】
式(1)において、左辺が共分散行列CxxとAR係数ベクトルaの積であり、右辺が右辺ベクトルcxxである。
共分散行列Cxxの要素は、式(2)として示される関係式(改良共分散関数)によって導かれる。
【0062】
【数2】
【0063】
式(2)において、x(n)は、複素数データを示し、「*」は、複素共役を示す。
また、右辺ベクトルcxxの要素は、式(2)において、kの値を「0」にすることにより導かれる。
以下、具体的な構成として5チャンネルのデータに基づいて3次の処理を行う場合を例として示す。モデル次数は任意に設定できるが、5チャンネルのデータの場合、改良共分散法では3次が最大となる。データのチャンネル数をさらに多くすると、正規方程式に適用できる次数も大きくなり、適用するモデル次数の柔軟性を高めることができる。
モデル次数を3次とした場合、共分散行列Cxxは、3行3列の行列式で表すことができ、その式を式(3)として示す。
【0064】
【数3】
【0065】
式(3)において、行列の各要素Cx3(k,j)は、複素数を示す。なお、式(2)におけるx(n)、すなわち、(x(0)、x(1)、x(2)、x(3)、x(4))は、それぞれが複素数データを示す。
式(3)に示されるように、共分散行列Cxxは、式(4)として示される関係があることから、エルミート行列(複素数対称行列)となる。
【0066】
【数4】
【0067】
また、同様に、3次の処理を行う場合の右辺ベクトルcxxを式(5)として示す。
【0068】
【数5】
【0069】
正規方程式とAR係数の関係を示した。本実施形態におけるFBLP部360における正規方程式作成部361は、上記の式(1)、式(2)に従って正規方程式を作成する。FBLP部360は、上記関係式を適用し、FBLP法によりAR係数を算出する。このFBLP法により算出されたAR係数は、複素数データを拡張する演算処理に用いる。
なお、本実施形態におけるスペクトル推定処理においては、上記のFBLP法に代え、拡張された複素数データに基づいて作成されるデータ行列から、後述のMFBLP法により算出されるAR係数に基づいて算出される。
【0070】
<検知した複素数データを拡張させる線形予測処理(データ拡張法)の原理>
続いて、図9と図10を参照し、検知した複素数データを拡張させるデータ拡張法について示す。
ARスペクトル推定法は、データ数(データ長)と次数を増やすことにより検出精度を高めることができる。
本実施形態においては、線形予測処理によるデータ拡張を行い、元となる複素数データよりデータ数を拡張させる。
図9は、本実施形態に適用するデータ拡張法について示す図である。
既知のN個の元データから、その既知の元データの領域に隣接する領域のデータを式(6)による演算式により拡張する。
【0071】
【数6】
【0072】
式(6)において、xハット(n)は、生成されるデータ(生成データ)を示し、aハット(i)は、AR係数を示し、x(n−i)は、元データを示す。ただし、Lは拡張データ数を示し、Mはデータ拡張を行う次数を示し、nは(N+1)からLまでの整数を示す。
【0073】
図9(a)に示すように、この式(6)による演算処理により、既知のN個の元データから拡張されるデータ(拡張データ)は、既知の元データを含めてL個に拡張した拡張データを得る場合を示している。このようなデータ拡張法を、Burg法に適用した場合についての報告(データ拡張Burg法)がある[参考文献:島村,鈴木、“Burg法のためのデータ予測”、電子情報通信学会論文誌、’94/8 Vol.J77-A No.8参照]。
【0074】
本実施形態では、前に示すデータ拡張方法を、複素数データを対象データとする後述のMFBLP法に適用する。
【0075】
本実施形態のデータ拡張方法を、図9(b)のように複素数データについて適用し、前向きの線形予測だけでなく、後向きの線形予測を行い、データの前後で拡張できるようにした(図10)。コンピュータ計算実験等の研究の結果、参考文献にある実数データによるBurg法以外の本実施形態の方法においても安定した推定精度を保てることを検証した。
【0076】
次に図を参照し複素数データを拡張する処理について、より詳細に示す。
図10は、複素数データを拡張する処理について示す図である。
最初に、図10(a)において、前向き線形予測式を用いて複素数データを拡張する処理について示す。
図に示されるx(1)、x(2)、x(3)、x(4)、x(5)は、拡張処理の対象(元データ)となる複素数データである。
これらの元データに対し、連続するようにデータを拡張する場合を示す。
ここで、データx(1)からx(5)の方向に線形予測する処理を前向きとし、その逆方向を後向きとする。
【0077】
まず、前向き線形処理を行う演算式(前向き線形予測式)を式(7)として示す。
【0078】
【数7】
【0079】
式(7)において、xfハット(n)は、生成されるデータ(生成データ)を示し、aハット(i)は、AR係数を示し、x(n−i)は、元データを示す。ただし、Mは、データ拡張を行う次数を示す。
前向き線形処理の対象とする元データは、次数が3の場合は(x(3)、x(4)、x(5))で、次数が5の場合は(x(1)、x(2)、x(3)、x(4)、x(5))のいずれかである。
上記に示したグループの元データを、式(7)に適用することにより、前向き方向の予測データを得ることができる。
また、各グループ内のデータの順序を逆にして、式(7)に示した前向き線形処理を行う演算式を適用することにより、後向き方向のデータを得ることもできる。
【0080】
次に、図10(b)において、後向き線形予測式を用いて複素数データを生成する処理について示す。
同じ元データを用いて、後向き線形処理を行う演算式(後向き線形予測式)を式(8)として示す。
【0081】
【数8】
【0082】
式(8)において、xbハット(n)は、生成されるデータ(生成データ)を示し、a*ハット(i)は、AR係数の複素共役を示し、x(n+i)は、元データを示す。ただし、Mは、データ拡張を行う次数を示す。
後ろ向き線形処理の対象とする元データは、次数が3の場合は(x(1)、x(2)、x(3))で、次数が5の場合は(x(1)、x(2)、x(3)、x(4)、x(5))のいずれかである。
上記に示したグループの元データを、式(8)に適用することにより、後向き方向の予測データを得ることもできる。
また、各グループ内のデータの順序を逆にして、式(8)に示した後向き線形処理を行う演算式を適用することにより、前向き方向のデータを得ることもできる。
【0083】
次に、図10(c)において、前向き線形予測式と後向き線形予測式とを用いて複素数データを生成する処理について示す。
この処理では、式(7)に示した前向き線形処理を行う演算式と、式(8)に示した後向き線形処理を行う演算式をそれぞれ用いる。
2つの演算式をそれぞれ用いることにより、元データの順序を反転させることなく、前方の予測演算処理と、後方の予測演算処理を行うことができる。
3次でデータ拡張する場合、前向き線形処理の対象とする元データは、(x(3)、x(4)、x(5))であり、後向き線形処理の対象とする元データは、(x(1)、x(2)、x(3))である。
また、5次でデータ拡張する場合、前向き線形処理の対象及び後向き線形処理の対象とする元データは、いずれも(x(1)、x(2)、x(3)、x(4)、x(5))である。
図10(d)は、3次の前向き線形処理及び後向き線形処理によりデータ拡張する場合を示す図である。
実数部と虚数部に分けて示した複素数データ(x(1)、x(2)、x(3)、x(4)、x(5))は、2つの曲線としてそれぞれ示される。実線が、実数部の変化を示し、破線が、虚数部の変化を示す。図10(c)に示したように、5チャンネルのデータに基づいて、3次のデータ拡張処理をするには、連続する3つのデータの組が、実数部と虚数部でそれぞれ2組得られる。それぞれの組の複素数データ(実数部と虚数部)は、式(7)と式(8)に示す前向きと後向きの線形予測式の複素数x(n−1)またはx(n+1)に代入される。
上記に示した、3通りの予測演算処理のいずれかを適用することにより、前方のデータ拡張処理と、後方のデータ拡張処理を行うことができる。
【0084】
<MFBLP法によるAR係数の算出処理の原理>
次に図11から図13を参照し、MFBLP法における特異値分解処理について示す。
最初に、MFBLP法を適用するデータ行列の生成と、そのデータ行列の特異値分解について示す。
図11は、MFBLP法におけるデータ行列とデータベクトルの生成と擬似逆行列で表現できることを示す図である。
AR係数を導出するための連立一次方程式を式(9)として定義する。
【0085】
【数9】
【0086】
式(9)におけるデータ行列Aとデータベクトルhとは、チャンネル(CH)ごとに算出される複素数データ(CH)を要素とする行列とベクトルとをそれぞれ示す。ベクトルgは、AR係数ベクトルを示す。
また、式(9)を複素数データによって示される要素に展開した式を式(10)として示す。
【0087】
【数10】
【0088】
この式(10)において、Nは、複素数データのデータ数を示し、Mは、次数を示す。データ行列Aとデータベクトルhは、データ拡張されているため、Nが拡張後のデータ数Neを示し、Mを増加後の次数Meを示す。
このデータ行列Aは、上下に2分割されたブロック行列として定義される。上段側のブロック行列はテープリッツ(toeplitz)行列であり、下段側のブロック行列は複素共役のハンケル(Hankel)行列である。
また、データベクトルhは、データ行列Aと同様に上下に2分割でき、上段側は複素数データのM番目からN番目までの複素数データを要素として構成され、下段側はデータ1番目から(N-M)番目までの複素数データに対応し複素共役となる複素数データを要素として構成される。
【0089】
本実施形態のようにデータ数(CH)を拡張することにより、元のデータ(CH)数から設定可能な次数Mよりも、さらに高次のMeに設定できる。これにより、MFBLP法を有効に利用することができる。つまり、ARスペクトル推定法において、高次であるほど推定精度が良くなるという特性を引き出すことができる。
また、次数を増加できない状況においても、データ行列とデータベクトルの要素数が拡張されるので、スペクトル推定精度が向上する。
なお、データ行列Aとデータベクトルhの上段側は、前方線形予測法( Modified Forward Linear Prediction Method : MFLP、=共分散法 )として使用することができ、下段側は、後方線形予測法( Modified Backward Linear Prediction Method : MBLP )として使用することができる。
また、式(9)は、一般化逆行列(疑似逆行列)による式(11)として展開することができる。
【0090】
【数11】
【0091】
式(11)において、A#は、データ行列Aの疑似逆行列を示す。
疑似逆行列A#は、データ行列Aの行数mと列数nの関係が(m>n)の場合、式(12)として示すように「過(優)決定方程式」となり、左疑似逆行列で計算できる。
【0092】
【数12】
【0093】
また、疑似逆行列A#は、データ行列Aの行数と列数の関係が(m<n)の場合、式(13)として示すように「劣決定方程式」となり、右疑似逆行列で計算できる。
【0094】
【数13】
【0095】
式(12)又は式(13)を用いることにより、擬似逆行列A#を求めることができる。
【0096】
続いて、特異値分解の演算処理について説明する。
図12は、特異値分解の演算処理を示す図である。
特異値分解演算処理の計算アルゴリズムは、任意のアルゴリズムを用いることができ、特に限定することはない。データ行列Aの特異値分解の演算式(Autonne-Eckart-Young定理)を式(14)として示す。
【0097】
【数14】
【0098】
式(14)において、Uは、データ行列Aの左特異ベクトル(AHAの固有ベクトル)であり、Vは、データ行列Aの右特異ベクトル(AAHの固有ベクトル)である。また、式(14)を式(15)として展開することができる。
【0099】
【数15】
【0100】
式(15)として示されるように、データ行列Aと、データ行列Aの左特異ベクトルU(AHAの固有ベクトル)と、データ行列Aの右特異ベクトルV(AAHの固有ベクトル)とに基づいて、部分行列Σが算出される。ただし、データ行列Aの左特異ベクトルUと右特異ベクトルVは、式(16)として示すようにユニタリ行列である。
【0101】
【数16】
【0102】
この部分行列Σは、式(17)として示されるように、その特異値σiを対角要素とする対角行列である。
【0103】
【数17】
【0104】
その結果から、特異値は、固有値の正の平方根であるので、固有値と等価な値として扱うことができる。
【0105】
特異値分解の式(15)、式(16)として示された結果から、擬似逆行列を式(18)として示す演算式により算出する。
【0106】
【数18】
【0107】
式(18)において、rは、擬似逆行列A#のランク(階数)を示す。また、部分行列Σの逆行列を式(19)として示す。
【0108】
【数19】
【0109】
また、式(18)は、式(20)として示すことができる。
【0110】
【数20】
【0111】
このようにランクrの値を適当な値に設定し、(特異値σi)−1が0に近い値の特異値(微小特異値)を切り捨ててσi−1を0と置き、信号部分空間の擬似逆行列A#を算出することができる(例えば、ランクr=2の場合には、Σ−1=diag(σ1−1,σ2−1,0,・・・,0)である)。
なお、微小特異値の切り捨てについては、例えば、後述の波数推定数(図17、図18)により定める。
【0112】
また、式(21)として示すように、式(12)及び式(13)として示した左疑似逆行列も右疑似逆行列も、特異値分解からの擬似逆行列A#から計算することができる。
【0113】
【数21】
【0114】
上記に示したように、特異値分解することにより、擬似逆行列のランクを設定することができる。また、データ行列が正方行列でない場合であっても、そのまま擬似逆行列を算出することができる。さらに、過・劣決定に左右されること無く、計算精度を高めることができる。これにより、算出される解が安定する。
【0115】
続いて、信号部分空間の擬似逆行列A#からAR係数aを算出する処理について示す。
図13は、信号部分空間の擬似逆行列A#から算出されるAR係数aから、白色雑音の分散値とパワースペクトルを求める演算処理を示す図である。
この図13に示されるMFBLP法においても、基本的には、AR係数が導かれた後の処理は、標準的なARスペクトル推定と同様の演算処理により導くことができる。
以上に示した演算処理を式(22)として整理する。式(22)は、信号部分空間のAR係数aを算出する演算式である。
【0116】
【数22】
【0117】
式(22)において、Σ-1は式(23)として示される。
【0118】
【数23】
【0119】
先に算出した疑似逆行列A#を式(22)に代入することによりAR係数を算出することができる。
なお、特異値を切り捨てる数を決定するランクrの値は、波数推定結果に応じて設定することができる。また、ランクrの値は、データ拡張の演算処理のためのランクrの値と、パワースペクトルを算出する演算処理のためのランクrの値を別の値にすることもできる。例えば、データ拡張の演算処理のためのランクrの値は、ランクrの設定可能な範囲の最大値に固定してもよい。このようにして算出されたAR係数aから、白色雑音の分散値を算出する。
【0120】
続いて、式(22)により導かれるARパラメータ推定値(AR係数a)に基づいて、入力白色雑音の分散σv2(ハット)を導く関係式を式(24)として示す。
【0121】
【数24】
【0122】
ARモデルによる線形予測では、予測値と観測値の差(予測誤差)の平均2乗誤差や最小2乗誤差が最小となる条件から、この正規方程式が導かれる。
この正規方程式を一般的な手法により解くことにより、AR係数が導かれる。
また、式(24)によって算出される入力白色雑音の分散σv2(ハット)に基づいて、パワースペクトルSxx(ω)を算出する演算式を式(25)として示す。
【0123】
【数25】
【0124】
式(25)において、ωは角速度を示し、HAR(ω)は、角速度ωにおけるARフィルタの伝達関数からの周波数特性を示し、Svv(ω)は、角速度ωにおける入力白色雑音のパワースペクトルを示し、Svv(ω)=σv2と表せる。この角速度ωは、本実施形態に示すレーダ装置のような方向検出に利用する場合には、受信波の位相差に換算する。
以上に示した演算式を用いることにより、ターゲットの方向と合致したピークの特徴を持つスペクトルを導くことができる。
なお、入力白色雑音の分散値を乗算しないで作成したスペクトルによって、パワースペクトルの分布を推定することも可能である。パワースペクトルの分布(スペクトルの形状)は、変わらないので、入力白色雑音の分散値を乗算する演算を省略することもできる。
【0125】
次に、本実施形態におけるターゲットに対応付けて記憶されるAR係数を関連付ける具体的な処理について説明する。
このAR係数の関連付け処理は、図7における方位検出部30AのAR係数算出部326A(363A)及びターゲット連結処理部32aが主として行う処理である。
図14は、メモリ21に設けられるテーブルを示す図である。
ターゲット連結処理部32aは、データ拡張部310Aにおけるデータ拡張処理を行うため、図14に示すテーブルにおいて、ターゲット毎に、今回のターゲット群(t)と、確定した過去のターゲットデータから予測されたターゲット(t)と、過去に確定しているターゲット(t−1)とを結びつけるため以下の処理を行う。
【0126】
この図14における項目(t−1)の列は、1サイクル前(前回)の検知サイクルの結果を示す。
各検知サイクルの結果としては、それぞれ、確定されたターゲット毎に距離r、縦位置long_d(アンテナの配列方向に対して垂直方向)、横位置late_d(アンテナの配列方向に対して平行方向の位置)、ターゲットとの相対速度velo(すなわちv)、上りピーク周波数ポイントf_up、上りピーク周波数時のAR係数AR_C_up、下りピーク周波数ポイントf_dwn、下りピーク周波数時のAR係数AR_C_dwnが、メモリ21に、図14のテーブル形式により格納されている(正確には上りピーク周波数時のAR係数AR_C_upと下りピーク周波数時のAR係数AR_C_dwnの記憶領域は他より大きくなるが、表を例示するうえで便宜上同じとしている)。ここで、ターゲットの上記縦位置long_dと横位置late_dは、ターゲットとの角度(受信波の到来方向の角度)及び距離rとから求められる。角度がθであり距離rである場合、縦位置long_dはr・cosθにより、横位置late_dはr・sinθにより算出される。
【0127】
また、ターゲット連結処理部32aは、過去に確定しているターゲットの距離r、縦位置long_dと横位置late_d及び相対速度veloとから、今回サイクル時の各ターゲットの距離r、縦位置long_dと横位置late_d及び相対速度、ピーク周波数ポイントを予測しておく。例えば、縦位置long_dと横位置late_dとピーク周波数ポイントの予測は、前回の距離r、縦位置long_dと横位置late_d及び相対速度に基づいて検知サイクル周期後の時間における移動可能な範囲を求める。相対速度の予測は、過去何サイクルかの相対速度値推移の変化の傾き等を算出して予測することができる。
例えば、ターゲット連結処理部32aは、過去に確定している結果から予測した距離r、縦位置long_dと横位置late_dとピーク周波数ポイント及び相対速度それぞれに対応して、予め設定された移動可能範囲と周波数ポイント範囲、及び相対速度範囲を設けて、今回サイクル時で計算された各値がその範囲内に入るか否かで結びつけを行い、範囲外の場合は異なるターゲットであると判断する。
【0128】
そして、ターゲット連結処理部32aは、図14のテーブルにおいて、今回の検知サイクルにおけるターゲットが、過去のターゲットと結びついた場合、今回の検知サイクルの結果を(t−1)の結果に移し、次のサイクルの予測の結果を計算する。
また、ターゲット連結処理部32aは、今回のターゲット群の結果と結びつけられない過去のターゲットが存在した場合、その過去のターゲットの情報を全てクリアする。
従って、マルチパスの影響のある距離にターゲットが入り、ビート周波数におけるピーク検知されない検知サイクルになると、過去のターゲット群の結果を用いるフィルタ効果がリセットされることになる。図14に示す本実施形態の場合、過去1回の検知サイクルのターゲットの結果をメモリ21に記憶している。
【0129】
なお、ターゲット連結処理部32aは、今回の検知サイクルにおけるターゲットと結びつけられなかった過去のターゲットが検出された場合においても、確定されていた過去のターゲットの結果は、予め定められる所定のサイクル数だけ持続されるようにしても良い。
また、記憶される結果が順次更新されることから、過去の結果に基づいて推定する予測結果も順次更新される。ターゲット連結処理部32aは、マルチパスなどの影響で今回の検知サイクルにおいてターゲットが検出されなくても、さらに次の検知サイクル以降において関連付けられた場合、マルチパスなどの影響でピーク検知されないサイクル数以外の過去データをフィルタ処理に使えるようにすることができる。
また、トラッキング制御における外挿法のように、ピーク値が検知さない検知サイクルの回において、上記予測結果を今回の検知サイクルにおける結果として用い、ターゲットの存在状態を継続することも可能である。
【0130】
また、この図に示されるテーブルからAR係数を呼び出す方法では、ターゲット連結処理部32aは、すでに検出されたターゲットに対応する距離ポイント情報に基づいて、推定範囲を選択することが可能となり、処理効率を向上させることができる。すなわち、ターゲット連結処理部32aは、記憶されたAR係数を参照する際に、ターゲットとの相対速度、角度に基づいて範囲を限定することができる。そして、次の回に行われる検知サイクルでは、すでに検出されたターゲットに対応する距離ポイント情報に基づいた推定範囲を選択することが可能となる。これにより、ターゲット連結処理部32aは、処理効率を向上させることができる。そのため、ターゲット連結処理部32aは、限られた範囲の距離ポイントに対応するAR係数を参照することができるので、呼び出す際の精度を高めることができる。
【0131】
図15は、AR係数の記憶方法、呼出方法を示す図である。
この図に示されるAR係数の記憶方法では、ターゲット連結処理部32aは、最終的にターゲットとして確定した距離ポイントに関係付けを行って、AR係数をメモリ21に記憶させる。メモリ21に書き込まれる複素数データは、今回制御サイクルによる情報である。
ターゲット連結処理部32aは、距離ポイント情報をキーにして参照し、メモリ21に記憶されるAR係数を呼び出す。メモリ21から呼び出されるAR係数は、過去制御サイクルによる情報である。
これにより、方位検出部30Aは、距離ポイント情報をキーとして、ターゲットとの関連付けを行うことができる。
【0132】
図16から図20を参照し、処理のフローを説明する。
図16は、本実施形態の主な処理の手順を示すフローチャートである。
次に示す処理の手順における前提条件について、例えば次のように整理する。
1回(サイクル)のデータ取得によって検知される複素数データに含まれるチャンネル数N(データ数)を5chとする。データ拡張によって拡張された複素数データのチャンネル数(拡張チャンネル数)Ne(データ数)を9chとする。データ拡張により増加させた次数(増加次数)Meを5次とする。以上に示したそれぞれの値は、予め定められているものとする。
この図16によって示される処理のフローは、レーダ全体構成でのピーク検知で選出された複数のターゲット別に、制御サイクル(図8参照)毎に繰り返される処理の手順を示し、最初にターゲットが検出された場合の手順については、後述する。
【0133】
ステップSa101において、チャンネル(CH)毎の複素数データが今回の制御サイクル内で1回取得される。この1回の取得により得られる複素数データ(n)のチャンネル数N(データ数)は5chである。この複素数データの取得は、周波数分解処理部22によって行われ、メモリ21に記憶されている受信波によるビート信号を読み込みアンテナ毎のビート信号から周波数変換して算出される。
続いて、ステップSa102において、ターゲット連結処理部32aは、メモリ21に設けられるテーブル(図14)に記憶されている過去(前回)制御サイクルのAR係数(次数Me)1個を呼び出し、データ拡張部310Aに供給する。
【0134】
続いて、ステップSa103において、データ拡張部310Aは、受信波の到来方向を算出する処理を繰り返し行う検知サイクルの今回の検知サイクルにおいて取得された1個(1回分)の複素数データ、及び、ステップSa102においてメモリ21から呼び出されたAR係数(次数Me)から、拡張複素数データを生成する。上記の前提条件に従って、この拡張複素数データに含まれるチャンネル数Ne(データ数)は9chである。このデータ拡張部310によるデータ拡張によりチャンネル数N(5ch)を、チャンネル数Ne(9ch)に拡張させることができる。
【0135】
続いて、ステップSa104において、データ行列・ベクトル作成部321Aは、拡張複素数データに基づいてデータ行列Aとデータベクトルhとを作成する。上記の前提条件に従って、次数Meを5次とする。
ステップSa105において、特異値分解部323は、ステップSa104の処理により作成されたデータ行列Aの特異値分解処理を行い、特異値を算出する。
【0136】
続いて、ステップSa106において、波数推定部324は、ステップSa105の処理により算出された、拡張複素数データに基づいたデータ行列Aの特異値の中から最大の値を示す特異値(最大特異値)を判定する。
波数推定部324は、その判定の結果により、該当ターゲット群では次ステップ以降の波数推定は行わなくするか否かを決定する。波数推定部324は、この最大特異値判定処理により、最大特異値の値が予め設定した閾値よりも小さい場合は、該当ターゲット群に対しては次ステップ以降の波数推定処理を中断させる。
【0137】
ステップSa107において、波数推定部324は、それぞれ算出された特異値を、算出された特異値の最大の値に基づいて正規化する。この特異値の正規化処理では、各特異値を最大特異値で割った値を正規化特異値とする。レーダのように、ターゲットとの距離によって特異値(信号強度)が変動する場合は、特異値の値も変動する。それゆえ、各特異値の値を正規化して相対的に特異値間の大小関係を判定することで判定が容易となる。
ステップSa108において、波数推定部324は、正規化された特異値を予め定められる閾値に基づいて判定し、その判定結果に基づいて後段の処理の波数を選択する。
この波数推定ステップでは、図18にあるように、4個の閾値を判定に用いる。このように複数の閾値を設定することにより、選択された波数を信号波数の推定値とすることができ、波数推定結果を柔軟に調整できる。
【0138】
図17と図18は、図16においてステップSa106からステップSa108までに示された信号波数推定処理の一態様を示す図である。
ステップS106aは、ステップSa106(図16)に対応する最大特異値を判定する処理である。ステップS106aによる予め設定した閾値(σmax_th)よりも最大特異値の値(σa)が大きいか否かを判定することにより、予め設定した閾値(σmax_th)よりも最大特異値の値(σa)が大きくない場合(ステップS106a:No)には、ステップS106bにおいて、得られた情報(複素数データ)の信頼度が低いと判定し、波数推定部324は、該当ターゲットに対しての次ステップの波数推定処理を行わなくする。最大特異値は、入力信号の強度と等価(比例する)であることから、路面マルチパス等の車載用レーダ特有のクラッタ状況による信号を受信するような場合であっても、最大特異値の値を判定することにより、間違った方位推定となることを抑制することができる。
例えば、このステップS106bでは、ステップS106b−1に示すように、波数推定及び方位検出の双方をキャンセルすることができる。また、ステップS106b−2に示すように、波数推定をキャンセルして、任意の波数(例えば、最大波数)を強制的に指定することとしてもよい。この場合、ステップS108i(図18)に進む。
【0139】
波数推定部324は、ステップS106aによる判定により、予め設定した閾値よりも最大特異値の値が大きい場合(ステップS106a:Yes)には、ステップS107aの処理を行う。ステップS107aにおいて、波数推定部324は、ステップS106aに対応する特異値の正規化処理を行い、各特異値σxを最大特異値σaでそれぞれ除算した値(σx/σa)を正規化特異値σyとする。yは自然数を示す。
【0140】
図17において示されるステップS108aからS108iまでの処理は、波数推定部324が行うステップSa108(図15)に対応する波数推定処理である。
ステップS108aでは、ステップSa107(図15)において正規化処理された特異値の中から2番目に大きな特異値(正規化第2特異値σ2)を選択し、正規化第2特異値σ2が予め定められる閾値Th1より小さいか否かを判定する。
ステップS108aによる判定の結果、正規化第2特異値σ2が予め定められる閾値Th1より小さくないと判定した場合(ステップS108a:No)には、ステップS108cに進む。
【0141】
ステップS108bでは、ステップS108aにおける判定の結果、正規化第2特異値σ2が予め定められる閾値Th1より小さいと判定した場合(ステップS108a:Yes)には、推定波数を1に定め、示されない推定波数情報を記憶する記憶領域に記録し、波数推定処理を終える。
【0142】
ステップS108cでは、ステップSa107において正規化処理された特異値の中から3番目に大きな特異値(正規化第3特異値σ3)を選択し、正規化第3特異値σ3が予め定められる閾値Th2より小さいか否かを判定する。判定の結果、正規化第3特異値σ3が予め定められる閾値Th2より小さくないと判定した場合(ステップS108c:No)には、ステップS108eに進む。
【0143】
ステップS108dでは、ステップS108cにおける判定の結果、正規化第3特異値σ3が予め定められる閾値Th2より小さいと判定した場合(ステップS108c:Yes)には、推定波数を2に定め、示されない推定波数情報を記憶する記憶領域に記録し、波数推定処理を終える。
【0144】
ステップS108eでは、ステップSa107において正規化処理された特異値の中から4番目に大きな特異値(正規化第4特異値σ4)を選択し、正規化第4特異値σ4が予め定められる閾値Th3より小さいか否かを判定する。判定の結果、正規化第4特異値σ4が予め定められる閾値Th3より小さくないと判定した場合(ステップS108e:No)には、ステップS108gに進む。
【0145】
ステップS108fでは、ステップS108eにおける判定の結果、正規化第4特異値σ4が予め定められる閾値Th3より小さいと判定した場合(ステップS108e:Yes)には、推定波数を3に定め、示されない推定波数情報を記憶する記憶領域に記録し、波数推定処理を終える。
【0146】
ステップS108gでは、ステップSa107において正規化処理された特異値の中から5番目に大きな特異値(正規化第5特異値σ5)を選択し、正規化第5特異値σ5が予め定められる閾値Th4より小さいか否かを判定する。判定の結果、正規化第5特異値σ5が予め定められる閾値Th4より小さくないと判定した場合(ステップS108g:No)には、ステップS108iに進む。
【0147】
ステップS108hでは、ステップS108gにおける判定の結果、正規化第5特異値σ5が予め定められる閾値Th4より小さいと判定した場合(ステップS108g:Yes)には、推定波数を4に定め、示されない推定波数情報を記憶する記憶領域に記録し、波数推定処理を終える。
【0148】
ステップS108iでは、ステップS108gにおける判定の結果、正規化第5特異値σ5が予め定められる閾値Th4より小さくないと判定した場合(ステップS108g:No)には、推定波数を5に定め、示されない推定波数情報を記憶する記憶領域に記録し、波数推定処理を終える。
【0149】
このようにステップS108aからS108iまでの波数推定処理における判定閾値は、波数1と波数2以上とを分別する閾値Th1、波数2と波数3以上とを分別する閾値Th2、波数3と波数4以上とを分別する閾値Th3、波数4と波数5とを分別する閾値Th4の4個とする。
【0150】
図16に戻り、ステップSa109において、擬似逆行列算出部325は、ステップSa108において波数推定部324によって推定された波数に応じて今回検知サイクルにおける信号部分空間の疑似逆行列を作成する処理を行う。
擬似逆行列算出部325は、ステップSa105において、特異値分解部323が算出した特異値に基づいて、前述の演算式に従って疑似逆行列を作成する。
ステップSa110において、AR係数算出部326は、ステップSa109において算出した擬似逆行列とデータベクトルに基づいてAR係数と入力白色雑音の分散値を算出する。
【0151】
続いて、ステップSa111において、パワースペクトル算出部380は、ステップSa110において算出されたAR係数と入力白色雑音の分散に基づいてパワースペクトルを算出する。
ステップSa112において、パワースペクトル算出部380は、算出されたパワースペクトルに基づいてターゲット数及びターゲットの方向を示す角度を検知する。
ステップSa113において、ターゲット連結処理部32aは、AR係数算出部326によって算出された次数MeのAR係数(n)をメモリ21に記憶させる。
以上に示した手順により、電子走査型レーダ装置は、検出精度を高めた方位検出を行うことができる。
【0152】
上記の図16に示す処理の手順において、データ拡張部310Aが最初にターゲットを検知した検知サイクルにおいて取得するAR係数(n−1)は、予め定められた値を初期値として上記に示す処理の手順を行うことも可能である。
本実施形態においては、データ拡張用のAR係数(AR係数2)を1回目の検知サイクルにおいて生成するFBLP部360Aを備えていることにより、以下に示す手順を図16に示す手順に付加して上記の初期値に代えることができる。これにより、更にターゲットを検知した時点からの検出精度を高めることができる。
以下、FBLP部360Aが生成するAR係数(AR係数2)を、2回目のターゲット検知サイクルに適用し、3回目以降は、MFBLP部320Aが生成するAR係数(AR係数1)を適用する場合の一態様について示す。
【0153】
図19は、AR係数の初期値を定める処理の手順を示すフローチャートである。
まず、ステップSa101において、チャンネル(CH)毎の複素数データが今回の制御サイクル内で1回取得された後に、ステップSa201において、現在の検知サイクルが、最初にターゲットを検出した検知サイクルであるか否かをターゲット連結処理部32aの結果を参照して判定する。ステップSa201における判定の結果、現在の検知サイクルが、最初にターゲットを検出した検知サイクルでないと判定した場合(ステップSa201:No)は、ステップSa205に進む。ステップSa201における判定の結果、現在の検知サイクルが、最初にターゲットを検出した検知サイクルであると判定した場合(ステップSa201:Yes)は、ステップSa202に進む。
【0154】
ステップSa202において、正規方程式作成部361は、最初にターゲットを検出した今回検知サイクルにおいて取得した複素数データに基づいて次数Mの正規方程式を作成する。
ステップSa203において、AR係数算出部363Aは、正規方程式作成部361によって作成された正規方程式から導かれる第2の次数のAR係数(AR係数2)を算出する。このように、AR係数算出部363Aは、今回検知サイクルにおいて検知された受信波によるビート周波数に応じた複素数データに基づいて算出される次数MのAR係数2(n)を得る。
ステップSa204において、AR係数算出部363Aは、導かれたAR係数2(n)を、最初にターゲットを検出した検知サイクルのAR係数としてターゲット連結処理部32aに供給する。ターゲット連結処理部32aは、供給されたAR係数2(n)をメモリー21に記憶させる。メモリー21に記憶させた後、ステップSa112に進む。
【0155】
続いて、ステップSa205において、現在の検知サイクルが、最初にターゲットを検出してから2回目の検知サイクルであるか否かをターゲット連結処理部32aの結果を参照して判定する。ステップSa205における判定の結果、現在の検知サイクルが、最初にターゲットを検出してから2回目の検知サイクルでないと判定した場合(ステップSa205:No)は、ステップSa102に進む。ステップSa205における判定の結果、現在の検知サイクルが、最初にターゲットを検出してから2回目であると判定した場合(ステップSa205:Yes)は、ステップSa206に進む。
【0156】
ステップSa206において、データ拡張部310Aは、メモリー21に記憶されている、最初にターゲットを検出した検知サイクルのAR係数(次数M)をターゲット連結処理部32aを制御して呼び出す。
ステップSa207において、データ拡張部310Aは、今回の検知サイクルにおいて取得された複素数データ、及び、最初にターゲットを検出した検知サイクルのAR係数から、データ数を増加させた拡張複素数データ(次数Me)を生成する。拡張複素数データ(次数Me)を生成した後、ステップSa104に進む。
【0157】
なお、ステップSa102からステップSa113までの処理は、図16と同じである。ただし、ステップSa205において最初にターゲットを検出してから2回目の検知サイクルであると判定された場合は、ステップSa104において、データ行列・ベクトル作成部321Aは、ステップSa207において拡張された拡張複素数データに基づいてデータ行列Aとデータベクトルhとを作成する。
【0158】
本実施形態に示す手順によれば、最初にターゲットを検出してから検知2回(サイクル)目で次数MeのAR係数1(n)が得られる。次数MeのAR係数1(n)が次の検知サイクルにおいて参照されるため、次数Meにデータ拡張した効果は、3回目(サイクル)以降の検知サイクルに表れる。
このように、本実施形態に示す電子走査型レーダ装置は、検出精度を高めた方位検出ができる。
【0159】
(第2実施形態)
図1から図20を参照し、スペクトル推定処理において高分解能アルゴリズムとして知られるARスペクトル推定法を用いる場合の他の態様について、より具体的に示す。
この図1に示した方位検出部30に基づいて、第1実施形態に示した処理手順と異なる処理手順について示す。図1から図19に示す構成と同じ構成には同じ符号を付す。
図20は、AR係数の初期値を定める処理の手順を示すフローチャートである。
まず、ステップSa101において、チャンネル(CH)毎の複素数データが今回の制御サイクル内で1回取得される。
その後、ステップSa201において、現在の検知サイクルが、最初にターゲットを検出した検知サイクルであるか否かをターゲット連結処理部32aの結果を参照して判定する。ステップSa201における判定の結果、現在の検知サイクルが、最初にターゲットを検出した検知サイクルでないと判定した場合(ステップSa201:No)は、ステップSa102に進む。ステップSa201における判定の結果、現在の検知サイクルが、最初にターゲットを検出した検知サイクルであると判定した場合(ステップSa201:Yes)は、ステップSa202に進む。
【0160】
ステップSa202において、正規方程式作成部361は、最初にターゲットを検出した今回検知サイクルにおいて取得した複素数データに基づいて次数Mの正規方程式を作成する。
ステップSa203において、AR係数算出部363Aは、正規方程式作成部361によって作成された正規方程式から導かれる第2の次数のAR係数(AR係数2)を算出する。このように、AR係数算出部363Aは、今回検知サイクルにおいて検知された受信波によるビート周波数に応じた複素数データに基づいて算出される次数MのAR係数2(n)を得る。
ステップSa207において、データ拡張部310Aは、今回の検知サイクルにおいて取得された複素数データ、及び、最初にターゲットを検出した検知サイクルのAR係数から、データ数を増加させた拡張複素数データ(次数Me)を生成する。拡張複素数データ(次数Me)を生成した後、ステップSa104に進む。
なお、ステップSa102からSa113までの処理は、図16と同じである。
ただし、ステップSa201において最初にターゲットを検出した検知サイクルであると判定された場合は、ステップSa104において、データ行列・ベクトル作成部321Aは、ステップSa207において拡張された拡張複素数データに基づいてデータ行列Aとデータベクトルhとを作成する。
このように、本実施形態に示す電子走査型レーダ装置は、検出精度を高めた方位検出ができる。
【0161】
本実施形態に示す手順によれば、最初にターゲットを検出した検知1回目(サイクル)で次数MeのAR係数1(n)が得られる。次数MeのAR係数1(n)は、次の検知サイクルにおいてデータ拡張処理において参照されるため、次数Meにデータ拡張した効果は、2回(サイクル)目以降の検知サイクルに表れる。
なお、本実施形態に示す手順の場合、ターゲットを検知した最初の検知サイクルにおいて、データ拡張を行うためのAR係数2(n)を算出する演算と、スペクトル推定処理におけるAR係数1(n)を算出する演算とを、1回の検知サイクル内に処理する必要がある。
このように、本実施形態に示す電子走査型レーダ装置は、検出精度を高めた方位検出ができる。
【0162】
(第3実施形態)
図1から図25を参照し、スペクトル推定処理において高分解能アルゴリズムとして知られるARスペクトル推定法を用いる場合の他の態様について、より具体的に示す。
図21は、本実施形態の方位検出部の構成を示すブロック図である。
この図21に示される方位検出部30Bは、図1に示した方位検出部30の一態様である。図1、図7に示す構成と同じ構成には同じ符号を付す。
図21に示される方位検出部30Bとターゲット連結処理部32bのそれぞれは、信号処理部20A(図1)における方位検出部30とターゲット連結処理部32である。
【0163】
ターゲット連結処理部32bは、今回検知サイクルにおいて算出されたAR係数1(n)をメモリ21に書き込んで記憶させる。AR係数1(n)は、今回検知サイクルで拡張された複素数データ(拡張複素数データ)から、MFBLP部320Bによって算出される。
ターゲット連結処理部32bにより、メモリ21に書き込まれたAR係数1が、次の検知サイクル(n回目)である今回検知サイクルにおいて呼び出された場合、そのAR係数1は、過去(前回)のAR係数1(n−1)として呼び出される。
また、ターゲット連結処理部32bは、今回検知サイクルにおいて、今回検知サイクルで検出されたデータ拡張前の複素数データから、FBLP部360Bによって算出されたAR係数2(n)をメモリ21に書き込んで記憶させる。
ターゲット連結処理部32bにより、メモリ21に書き込まれたAR係数2が、次の検知サイクル(n回目)である今回検知サイクルにおいて呼び出された場合、そのAR係数2は、過去(前回)のAR係数2(n−1)として呼び出される。
【0164】
つまり、本実施形態は、第1実施形態に対して、メモリ21に記憶させるAR係数の数が異なる。メモリ21に記憶させる情報は、過去の制御サイクル数回分のMFBLP部320Bによって算出されたAR係数(AR係数1(n))と、FBLP部360Bによって算出されたAR係数(AR係数2(n))とである。
ターゲット連結処理部32bは、メモリ21に記憶されている過去の検知サイクルにおいてターゲットを結びつけた後、ターゲット毎に過去検知サイクル(図8)において記録されたAR係数1(n−1)、AR係数1(n−2)、AR係数2(n−1)、AR係数2(n−2)を方位検出部30Bへ出力する。
また、ターゲット連結処理部32bは、今回検知サイクル(図8)において取得された複素数データに基づいて算出されたAR係数1(n)及びAR係数2(n)に対して、ターゲット確定部31から出力される距離、相対速度及び方位の識別情報を付して、メモリ21に記録する。
【0165】
また、方位検出部30Bは、データ拡張部310B、MFBLP部320B、FBLP部360B、係数フィルタ部370、及び、パワースペクトル算出部380Bを備える。
データ拡張部310Bは、受信波の到来方向を算出する処理を繰り返し行う検知サイクルにおける今回の検知サイクルにおいて取得された複素数データ(n)、及び、今回の検知サイクルにおいて算出されるAR係数(AR係数2(n))と、過去の検知サイクルにおいて算出されたAR係数(AR係数2(n−1)、AR係数2(n−2))から算出される平均化AR係数2(n)から、データ数を増加させた拡張複素数データ(n)を生成する。
なお、今回の検知サイクルにおいて取得された複素数データ(n)は、周波数分解処理部22が周波数分解したビート周波数(上昇と下降のいずれか又は両方)に応じた複素数データである。
また、データ拡張部310Bにおける平均化AR係数2(n)は、後述の係数フィルタ部370によって、今回及び過去の制御サイクルにおいてそれぞれ算出されたものを平均化処理したものである。例えば、平均化AR係数2(n)は、係数フィルタ部370によって、今回の検知サイクルにおいて算出されたAR係数2(n)と、過去の検知サイクルにおいて算出されたAR係数2(n−1)とAR係数2(n−2)とを平均化処理した結果から導かれる。
なお、最初にターゲットを検知した制御サイクルにおいては、データ拡張部310Bにおける平均化AR係数2(n)は、後述のFBLP部360Bによって、最初にターゲットを検知した制御サイクルにおいて算出されたAR係数2(n)である。
【0166】
データ拡張部310Bは、受信波の到来方向を算出する処理を繰り返し行う検知サイクルにおける今回の検知サイクルにおいて取得された複素数データ、及び、今回の検知サイクルにおいて算出されたAR係数2(n)と、過去の検知サイクルにおいて算出されたAR係数2(n-1)と、AR係数2(n-2)とを平均化した平均化AR係数2から、データ数を増加させた拡張複素数データ(n)を生成する。
データ拡張部310Bは、データ数を拡張する元の複素数データ(n)に基づいて設定可能な第2の次数(M)より拡張させる。
【0167】
MFBLP部320B(第1演算処理部)は、拡張複素数データ(n)から作成したデータ行列とデータベクトルに基づいて、第1の次数(Me)のAR係数(AR係数1(n))と白色雑音の分散値とを算出する。
このようなMFBLP部320Bは、データ行列・ベクトル作成部321A、特異値分解部323、波数推定部324、擬似逆行列算出部325、及び、AR係数算出部326Bを備える。
AR係数算出部326Bは、擬似逆行列算出部325によって作成された信号部分空間の疑似逆行列と、データ行列・ベクトル作成部321Aによって導かれたデータ行列とから、AR係数と、入力白色雑音の分散σ2を算出する。このように、AR係数算出部326Bは、検知サイクルに応じて、ターゲットの存在が検知されたビート周波数である検出ビート周波数の複素数データに基づいたAR係数と、入力白色雑音の分散σ2を導くことができる。また、AR係数算出部326Bは、算出したAR係数1(n)と、入力白色雑音の分散σ2とを係数フィルタ部370に供給する。
また、AR係数算出部326Bは、算出したAR係数1(n)をターゲット連結処理部32bに供給し、メモリ21に書き込ませる。
【0168】
FBLP部360B(第2演算処理部)は、複素数データ(n)から作成した正規方程式に基づいて、第2の次数のAR係数(AR係数2(n))を算出する。
このようなFBLP部360Bは、正規方程式作成部361及びAR係数算出部363Bを備える。
【0169】
AR係数算出部363Bは、正規方程式作成部361によって作成された「今回検知サイクル」における第2の次数の正規方程式から導かれる第2の次数のAR係数(AR係数2(n))を算出する。このように、AR係数算出部363Bは、今回検知サイクルにおいて検知された受信波によるビート周波数に応じた複素数データに基づいて算出されるAR係数を得、後段のデータ拡張のための係数とする。
また、AR係数算出部363Bは、ターゲット連結処理部32bとAR係数フィルタ部372へ、導かれたAR係数(AR係数2(n))を出力する。
【0170】
係数フィルタ部370は、AR係数フィルタ部371とAR係数フィルタ部372を備える。
AR係数フィルタ部371は、AR係数算出部326Bによって、今回の制御サイクルにおいて算出されたAR係数1(n)と、ターゲット連結処理部32bによってメモリ21から呼び出された過去の制御サイクルにおいて算出されたAR係数1(n−1)とAR係数1(n−2)と、の平均化処理をして平均化AR係数1(n)を算出する。
AR係数フィルタ部371は、平均化処理をした平均化AR係数1(n)と、入力白色雑音の分散σ2をパワースペクトル算出部380Bへ出力する。
AR係数フィルタ部372は、AR係数算出部363Bによって、今回の制御サイクルにおいて算出されたAR係数2(n)と、ターゲット連結処理部32bによってメモリ21から呼び出された過去の制御サイクルにおいて算出されたAR係数2(n−1)とAR係数2(n−2)と、の平均化処理をして平均化AR係数2(n)を算出する。
AR係数フィルタ部372は、平均化処理をした平均化AR係数2(n)をターゲット連結処理部32bによってメモリ21に記憶させる。
パワースペクトル算出部380Bは、その平均化AR係数1(n)と入力白色雑音の分散σ2に基づいて導かれるパワースペクトルから受信波の到来方向を算出する。
なお、AR係数フィルタ部371は、導かれたAR係数1(n)をターゲット連結処理部32bに出力し、ターゲット連結処理部32bによってメモリ21に記憶させる。
【0171】
図22は、MFBLP法におけるAR係数の平均化処理を示す図である。
この図22において、次数を5次とした場合について説明する。
前述の式(22)と式(23)において示したように、AR係数は、信号部分空間の擬似逆行列から算出される。
算出されるAR係数ベクトルは、[a5(1) a5(2) a5(3)a5(4) a5(5)]Tとして示すことができる。添え字のTは、転置行列を示す。
今回制御サイクルにおいて算出されたAR係数1(今回AR係数1)をa1(t)として示す。また、過去の制御サイクルにおいて算出されたAR係数1(過去AR係数1)をa1(t−1)からa1(t−n)として示す。
「今回AR係数1:a1(t)」と「過去AR係数1:a1(t−1)からa1(t−n)」の各要素同士を平均(加算)する平均化処理によって平均AR係数1:Ave_a1(t)を算出する演算式を式(26)として示す。
【0172】
【数26】
【0173】
式(26)においてk1からkn+1は、重み係数である。
なお、本実施形態では、波数推定結果により、擬似逆行列を算出する過程においてランクを可変しているのみなので、AR係数ベクトルの次数、すなわちAR係数ベクトルの要素の数は一定の値になる。これにより、AR係数ベクトルの平均化処理が可能となる。
【0174】
図23は、FBLP法におけるAR係数の平均化処理を示す図である。
この図23に示される正規方程式は、上記の式(1)をAR係数について整理したものである。この正規方程式は、次数を3とした場合を式(27)として示す。
【0175】
【数27】
【0176】
式(27)に従って算出されたAR係数ベクトルは、[a3(1) a3(2) a3(3)]Tとして示すことができる。添え字のTは、転置行列を示す。今回制御サイクルにおいて算出されたAR係数2(今回AR係数2)をa2(t)として示す。また、過去の制御サイクルにおいて算出されたAR係数2(過去AR係数2)をa2(t−1)からa2(t−n)として示す。
「今回AR係数2:a2(t)」と「過去AR係数2:a2(t−1)からa2(t−n)」の各要素同士を平均(加算)する平均化処理によって平均AR係数2:Ave_a2(t)を算出する演算式を式(28)として示す。
【0177】
【数28】
【0178】
式(28)においてk1からkn+1は、重み係数である。
なお、本実施形態では、正規方程式の次数を固定していることから、AR係数ベクトルの要素の数が一定の値になる。これにより、AR係数ベクトルの平均化処理が可能となる。
【0179】
図24は、メモリ21に設けられるテーブルを示す図である。
この図24に示されるテーブルでは、前述の図14に示されるテーブルに対して、AR係数の項目が異なる。
追加となるAR係数の項目は、上昇方向のピーク周波数時のAR係数AR2_C_up、下降方向のピーク周波数時のAR係数AR2_C_dwnがあり、ピーク周波数ポイントに対応するAR係数2を格納する。
このピーク周波数時のAR係数は、メモリ21に、図24のテーブル形式により格納されている(正確には、上記の項目の記憶領域は他より大きくなるが、表を例示するうえで便宜上同じとしている)。メモリ21は、格納される上昇方向のピーク周波数時のAR係数AR1_C_upとAR2_C_up、下降方向のピーク周波数時のAR係数AR1_C_dwnとAR2_C_dwnを記憶する。
【0180】
図25を参照し、処理のフローを説明する。
図25は、本実施形態の処理を示すフローチャートである。
本実施形態に示す手順は、図22、図23に示したAR係数の平均化処理を、2回目以降のターゲット検知サイクルに適用する場合の一態様を示す。
第1実施形態における図16との相違点を中心に説明する。図16と同じ処理を行うステップには同じ符号を附す。
次に示す処理の手順における前提条件について、例えば次のように整理する。
1回のデータ取得によって検知される複素数データに含まれるチャンネル数N(データ数)を5chとする。データ拡張前の正規方程式の次数Mを3次とする。データ拡張によって拡張された複素数データのチャンネル数(拡張チャンネル数)Ne(データ数)を9chとする。データ拡張後の正規方程式の次数(増加次数)Meを5次とする。以上に示したそれぞれの値は、予め定められているものとする。
この図25によって示される処理のフローは、レーダ全体構成でのピーク検知で選出された複数のターゲット別に、制御サイクル(図8参照)毎に繰り返される。
【0181】
ステップSa101において、チャンネル(CH)毎の複素数データが今回の制御サイクル内で1回取得される。
続いて、ステップSa301において、正規方程式作成部361は、抽出した今回検知サイクルにおいて取得した複素数データに基づいて、ARモデルに適用する次数Mの正規方程式を作成する。
ステップSa302において、AR係数算出部363Bは、ステップSa301において作成された正規方程式から、次数Mの第2のAR係数(AR係数2)を算出する。
【0182】
続いて、ステップSa303において、AR係数フィルタ部372は、メモリ21に記憶されている、過去(前回、前々回)の検知サイクルにおいて導かれたAR係数(AR係数2(n−1)、AR係数2(n−2))をターゲット連結処理部32bを介して呼び出す。
ステップSa304において、AR係数フィルタ部372は、AR係数算出部363Bによって今回の検知サイクルにおいて算出された次数MのAR係数(今回AR係数2(n))と、ターゲット連結処理部32bから供給される過去(前回、前々回)の検知サイクルにおいて算出されたAR係数(AR係数2(n−1)、AR係数2(n−2))との平均化処理をして、平均化AR係数2(n)を算出する。
なお、ステップSa304に続くステップSa103からSa110までの処理は、前述の図16と同じである。
【0183】
続いて、ステップSa305において、AR係数フィルタ部371は、メモリ21に記憶されている、過去(前回、前々回)の検知サイクルにおいて導かれたAR係数(AR係数1(n−1)、AR係数1(n−2))をターゲット連結処理部32bを介して呼び出す。
ステップSa306において、AR係数フィルタ部371は、AR係数算出部326Bによって今回の検知サイクルにおいて導かれた次数MeのAR係数1と、ターゲット連結処理部32bから供給される過去(前回、前々回)の検知サイクルにおいて導かれたAR係数1(AR係数1(n−1)、AR係数1(n−2))との平均化処理をして、平均化AR係数1(n)を算出する。
なお、ステップSa306に続くステップSa111からSa113までの処理は、前述の図16と同じである。
ステップSa307において、AR係数フィルタ部372は、算出した平均化AR係数2(n)をターゲット連結処理部32bによってメモリ21に記憶させる。
【0184】
本実施形態に示す手順によれば、次数Meにデータ拡張した効果は、検知2回(サイクル)目以降に表れる。初回(1回目)の検知サイクルのみ、次数3次と5次のデータ拡張の演算をそれぞれ行うことにより、本実施形態に示す電子走査型レーダ装置は、検出精度を高めた方位検出ができる。
【0185】
(第4実施形態)
図1から図27を参照し、スペクトル推定処理において高分解能アルゴリズムとして知られるARスペクトル推定法を用いる場合の他の態様について、より具体的に示す。
図26は、本実施形態の方位検出部の構成を示すブロック図である。
この図26に示される方位検出部30Cは、図1に示した方位検出部30の一態様である。図1、図7、図19に示す構成と同じ構成には同じ符号を付す。
図26に示される方位検出部30Cとターゲット連結処理部32cのそれぞれは、信号処理部20A(図1)における方位検出部30とターゲット連結処理部32である。
【0186】
ターゲット連結処理部32cは、今回検知サイクルにおいて算出されたAR係数1(n)をメモリ21に書き込んで記憶させる。AR係数1(n)は、今回検知サイクルで拡張された複素数データ(拡張複素数データ)から、MFBLP部320Cによって導かれる。
ターゲット連結処理部32cにより、メモリ21に書き込まれたAR係数1が、次の検知サイクル(n回目)である今回検知サイクルにおいて呼び出された場合、そのAR係数1は、過去(前回、前前回)のAR係数1(n−1)、AR係数1(n−2)として呼び出される。
つまり、本実施形態は、第1実施形態に対して、メモリ21に記憶させる情報は、次数を増加させたAR係数のみである。そのAR係数(AR係数1)は、MFBLP部320Cによって算出される。
ターゲット連結処理部32cは、メモリ21に記憶されている過去の検知サイクルにおけるターゲットを結びつけた後、ターゲット毎に過去検知サイクル(図8)において記録されたAR係数1(n−1)、AR係数1(n−2)を方位検出部30Cへ出力する。
また、ターゲット連結処理部32cは、今回検知サイクル(図8)において取得された複数の複素数データに基づいて算出されたAR係数1(n)に対して、ターゲット確定部31から出力される距離、相対速度及び方位の識別情報を付して、メモリ21に記録する。
つまり、本実施形態は、第1から3実施形態に対して、データ拡張のためのAR係数の生成及びデータ拡張を行わずにスペクトル推定処理を行う点が異なる。
【0187】
方位検出部30Cは、MFBLP部320C、ARフィルタ部371、及び、パワースペクトル算出部380Bを備える。
【0188】
MFBLP部320C(第1演算処理部)は、今回の制御サイクルにおいて検出された複素数データ(n)から作成したデータ行列とベクトルに基づいて、第1のAR係数(AR係数)と白色雑音の分散値とを算出する。
MFBLP部320Cは、データ行列・ベクトル作成部321C、特異値分解部323、波数推定部324、擬似逆行列算出部325、及び、AR係数算出部326Bを備える。
【0189】
データ行列・ベクトル作成部321Cは、「今回検知サイクル」において検出された複素数データ(n)からデータ行列Aとベクトルhを作成する。
【0190】
このように、方位検出部30Cは、自己回帰モデルを用いるスペクトル推定法により、信号部分空間成分の擬似逆行列に基づいて受信波の到来方向を算出する。
なお、本実施形態において、データ行列・ベクトル作成部321、特異値分解部323、擬似逆行列算出部325及びAR係数算出部326が第2手段として機能する。波数推定部324が第3手段として機能する。AR係数フィルタ部371が第5手段として機能する。
【0191】
図27は、本実施形態の処理を示すフローチャートである。
図16、図25と同じ処理を行うステップには同じ符号を附す。
ステップSa104’において、データ行列・ベクトル作成部321Cは、「今回検知サイクル」において検出された複素数データ(n)から導かれるデータ行列Aとベクトルhを作成する。
ステップSa114において、AR係数フィルタ部371は、平均化したAR係数を今回AR係数として、メモリ21に記憶する。
このように、本実施形態においては、第1から第3実施形態に示したデータ拡張を行わない。データ拡張を行わないままMFBLP法を適用することが可能であり、MFBLP部320Cは、所望の次数のAR係数1(n)を算出することができる。
また、記憶するAR係数は、平均化した後のAR係数にすることもでき、AR係数フィルタの効果を増すことができる(図26の点線部参照)。
このように、本実施形態に示す電子走査型レーダ装置は、検出精度を高めた方位検出ができる。
【0192】
(第5実施形態)
次に、図28、図29を参照し、本実施形態による電子走査型レーダ装置について説明する。
図28は、本実施形態による電子走査型レーダ装置の構成例を示すブロック図である。
本実施形態においては、第1から第4実施形態と同様に、方位推定を高分解能アルゴリズムで行う。図1に示す第1から第4実施形態と同じ構成については、同一の符号を付し、以下第1実施形態との相違点について説明する。
信号処理部20Bにおいて周波数分解処理部22Bは、アンテナ毎の上昇領域と下降領域とのビート信号を複素数データに変換し、そのビート周波数を示す周波数ポイントと、複素数データとをピーク検知部23Bへ出力する。
そして、ピーク検知部23Bは、上昇領域及び下降領域それぞれのピーク値と、そのピーク値の存在する周波数ポイントとを検出し、その周波数ポイントを周波数分解処理部22Bへ出力される。
次に、周波数分解処理部22Bは、上昇領域及び下降領域それぞれについて該当する複素数データを、方位検出部30へ出力する。
【0193】
この複素数データが、上昇領域及び下降領域のそれぞれのターゲット群(上昇領域及び下降領域においてピークを有するビート周波数)となる。ここで、ピーク検知部23Bは、方位検出部の波数推定処理における最大特異値判定(ステップS106a)と同じ機能として動作させることができるので、削除することも可能となる。
ターゲット連結処理部32Bにおいて、過去に確定したターゲットと上りと下りの両方のターゲット群とを結びつける必要があるため、メモリ21には前述のテーブルが記憶されている。
ターゲット連結処理部32Bは、図1のターゲット連結処理部32と同様な処理により、今回の検知サイクルと、過去の検知サイクルとの連結処理を行う。
【0194】
そして、方位検出部30は、上昇領域及び下降領域それぞれにおいて、第1から第4実施形態に示したように、MFBLP法によるデータ行列を特異値分解を行い、また、波数推定を行うことにより、AR係数を算出する。
次に、方位検出部30は、上昇領域のAR係数及び下降領域のAR係数の各々について角度θを検出し、図29に示すテーブルとしてピーク組合せ部24Bへ出力する。
そして、ピーク組合わせ部24Bは、図29に示すテーブルの情報を元に、同様の角度を有する組み合わせを行い、上昇領域と下降領域とのビート周波数を組み合わせを距離検出部25及び速度検出部26へ出力する。
【0195】
距離検出部25は、第1実施形態と同様に、組み合わせの上昇領域と下降領域とのビート周波数により距離を算出する。
また、速度検出部26は、第1実施形態と同様に、組み合わせの上昇領域と下降領域とのビート周波数により相対速度を算出する。
ターゲット確定部31Bは、上述した上昇領域及び下降領域の複素数データ、上昇領域及び下降領域における周波数ポイントと距離と相対速度と方位とを、現在の状態として確定する。
そして、ターゲット連結処理部32Bは、ターゲット確定部31Bから入力される、ターゲット毎に、上昇領域及び下降領域それぞれの周波数ポイントと、上昇領域及び下降領域それぞれのAR係数と、距離と、縦位置と、横位置と、相対速度とを、第1から第4実施形態と同様の処理により前述のテーブルに記憶させる。
以上に示した手順により、電子走査型レーダ装置は、検出精度を高めた方位検出を行うことができる。
【0196】
(第6実施形態)
次に、図30、図31を参照し、本実施形態による電子走査型レーダ装置について説明する。
図30は、本実施形態による電子走査型レーダ装置の構成例を示すブロック図である。
本実施形態においては、第1実施形態と異なり、先にARスペクトル推定処理等の高分解能アルゴリズムより分解能が低いDBF(Digital Beam Forming)を用いて方位推定を行い、その後にMFBLP法を用いたARスペクトル推定処理による高分解能アルゴリズムで方位推定を行う構成である。図1に示す第1実施形態、図28に示す第5実施形態と同じ構成については、同一の符号を付し、以下第1実施形態、第5実施形態との相違点について説明する。
この図に示されるように、図1の第1実施形態における周波数分解処理部22とピーク検出部23との間にDBF処理部40が設けられ、上述したように、先にDBFを用いて受信波の到来する方位を検出する点が第1実施形態と異なる。
【0197】
第5実施形態と同様に、周波数分解処理部22は、入力されるビート信号を周波数分解(時間軸フーリエ変換)し、ビート周波数を示す周波数ポイントと、複素数データとを、DBF処理部40へ出力する。
次に、DBF処理部40は、入力される各アンテナに対応した複素数データを、アンテナの配列方向にフーリエ変換し、すなわち空間軸フーリエ変換を行う。
そして、DBF処理部40は、角度に依存、すなわち角度分解能に対応した角度チャンネル毎の空間複素数データを計算し、ビート周波数毎にピーク検知部23に対して出力する。
【0198】
これにより、DBF処理部40から出力される角度チャンネル毎の空間複素数データ(ビート周波数単位)の示すスペクトルは、ビーム走査分解能による受信波の到来方向推定に依存したものとなる。
また、アンテナの配列方向にフーリエ変換されているため、角度チャンネル間にて複素数データを加算しているのと同じ効果を得ることができ、角度チャンネル毎の複素数データはS/N比が改善されており、ピーク値の検出における精度を、第1実施形態と同様に向上させることが可能となる。
上述した複素数データ及び空間複素数データともに、第1実施形態と同様に、三角波の上昇領域及び下降領域の双方にて算出される。
【0199】
次に、ピーク検知部23は、DBF処理部40による処理の後に、DBF結果による角度チャンネル毎にピークの検出を行い、検出された各チャンネルのピーク値を、次のピーク組合せ部24へ角度チャンネル毎に出力する。すなわち、16の分解能による空間軸フーリエ変換の場合、角度チャンネルの数は15となる。
ピーク組合せ部24では、第1実施形態と同様に、上昇領域及び下降領域におけるピーク値のあるビート周波数とそのピーク値を組み合わせて、距離検出部25及び速度検出部26へ、角度チャンネル毎に出力する。
【0200】
そして、ペア確定部27は、距離検出部25及び速度検出部26各々から、順次入力される上記距離r及び相対速度vにより、図5のテーブルを角度チャンネル毎に生成し、第1実施形態と同様に、ターゲット毎に対応した上昇領域及び下降領域それぞれの適切なピークの組み合わせを、角度チャンネル毎に判定する。ここで、DBFでの分解能では、ターゲットが複数の角度チャンネルに跨って存在を示すので、近隣の角度チャンネル(マトリクス)との一致性も加味して、角度チャンネル毎に上昇領域及び下降領域それぞれのピークの適切な組み合わせを行うことができる。そして、上昇領域及び下降領域それぞれのピークのペアを確定し、確定した距離r及び相対速度vを示すターゲット群番号をターゲット確定部31へ出力し、図31に示すテーブルが作成される。
図31は、上昇領域及び下降領域それぞれのピークのペアを確定した結果を記憶するテーブルである。
ペア確定部27は、距離r及び相対速度vのみでなく、それぞれのターゲットの角度チャンネルの情報が得られるため、縦位置と横位置を求めることができるため、図6のテーブルに対して縦位置と横位置が含まれた、今回の検知サイクルの各ターゲット群に対応する結果を有する図31に示すテーブルを生成する。
【0201】
そして、ターゲット連結処理部32Cは、図31のテーブルの情報を用いて、今回の検知サイクルにおけるターゲットと、図8の過去の検知サイクルにおけるターゲットとの結びつけの処理を行うこととなり、結びつけのパラメータとして、距離と相対速度及びピーク周波数ポイントとに加えて、縦位置と横位置を用いることとなるため、結びつけの処理をより高い精度にて行うことが可能となる。
方位検出部30は、第1から第4実施形態に示したように波数推定を行う。
さらに、方位検出部30からの方位情報とDBFからの方位情報とに基づいてAND論理で推定することにより、方向検知の信頼度を向上させたり、互いの方位情報を分担、例えば、近距離では角度分解能が粗くて良いのでDBFの角度情報を用いたりできる効果を成す。
【0202】
このように、方位検出部30は、第1から第6実施形態に示したMFBLP法によるスペクトル推定処理を行うことができる。
【0203】
(本実施形態における方向推定特性)
続いて、本実施形態による電子走査型レーダ装置の方向推定特性について示す。
図32と図33は、本実施形態による電子走査型レーダ装置の方位推定特性の効果を示す図である。
先行する車両が2台の場合について、MFBLP法をそのまま適用した場合と、本実施形態によるデータ拡張とAR係数の平均化処理を行ったMFBLP法を適用した場合とを比較する。この比較において、ターゲット(先行車両)までの距離を同じに設定した複素数データに基づいて、実施形態の違いによる推定結果の差を比較する。ターゲット(55m離れた先行車両)が2台であり、その結果、到来波における波数を2と推定した場合を示す。
図32(a)に示すMFBLP法のみにおける推定結果は、チャンネル数を5CH、次数を3、波数を2としてスペクトル推定した結果である。
図に示される3つの曲線は、3サイクル分の結果を示している。この図に示されるように、MFBLP法のみにおいては、パワースペクトルを示す波形のピークの位置(角度)がばらつき、安定にターゲットの位置(角度)を検出することができない。つまり、単にMFBLP法をそのまま適用しても安定した結果を得ることができないことが分かる。
【0204】
一方、本実施形態によるデータ拡張を行ったMFBLP法を用いた場合を図32(b)と図33(c)に示す。また、データ拡張を行わず、算出したAR係数のフィルタ処理(平均化処理)をしたMFBLP法を用いた場合を図33(d)に示す。
図32(b)に示すデータ拡張を行ったMFBLP法における推定結果は、第1実施形態に基づいて、チャンネル数を9CH、次数を5、波数を2としてスペクトル推定した結果である。
図33(c)に示すデータ拡張を行ったMFBLP法における推定結果は、第3実施形態に基づいて、チャンネル数を9CH、次数を5、波数を2としてスペクトル推定した結果である。
図33(d)に示すAR係数の平均化処理をしたMFBLP法における推定結果は、第4実施形態に基づいて、チャンネル数を5CH、次数を3、波数を2としてスペクトル推定した結果である。
なお、図32(a)、(b)、図33(c)、(d)のいずれの場合も、同じ複素数データにもとづいて処理を行っている。
【0205】
このように、図32(b)と図33(c)、(d)に示される結果には、それぞれの曲線が示すピークが急峻であり、且つ、ピークが検出される方向が安定していることが示されている。その結果、ピーク値が2つ分離して検出できており、ターゲットの車両が2台存在することが良好に検出されている。
また、本実施形態に示したように、データ取得回数が1制御サイクルに1回の複素数データに基づいた場合であっても、図32(b)と図33(c)、(d)に示される推定結果から良好な推定結果を得ることができる。
【0206】
本実施形態による電子走査型レーダ装置は、検出ビート周波数の複素数データに基づいて、方位検出部30において、スペクトル推定を行う方程式の次数と、推定される実際の波数とを設定して方位推定を行うことにより、検出精度を向上させることができる。
【0207】
本発明に係る実施形態によれば、データ拡張と次数の増加を施したMFBLP法の処理が、相関行列等の入力データとデータの取得回数に伴う、記憶容量と演算負荷を増大することなく、ARスペクトル推定の特性を有効に活用した方位検出精度向上となる効果を奏する。
第1手段により、元の複素数データよりも長いデータ(CH)数に拡張できるので、第2手段のデータ行列とベクトルの要素数や次数を増やせる効果を奏する。
第2手段により、データ行列とベクトルから特異値分解することにより疑似逆行列を求めるので、相関行列(又は共分散行列)を求めることなく、計算精度の良いAR係数を求めることができる。また、信号部分空間のAR係数を求めることができるので、偽ピークを抑制した精度の良い方位検出ができる。また、元の複素数データから設定できる最大次数よりさらに次数を増加させることにより、より高次の方が推定精度が良くなるというARスペクトル推定の特性が反映できる効果を奏する。
第3手段により、比較的容易で、前ステップの特異値分解処理を有効に活用した方法で信号波数を推定できるという効果を奏する。最大特異値の大きさを判定することで、間違った方位推定をすることを防止できるので、レーダ全体構成でのピーク検知なし(例えば、全距離ポイント又は任意の距離ポイント範囲の角度をスペクトル推定する場合)や、ピーク検知後でも異なる閾値で波数推定を実行すべきかどうかの判断ができる効果を奏する。
また、正規化した特異値で波数を推定することで、ターゲットの距離に依存しない波数推定判定ができる効果を奏する。さらに、複数の特異値を判定する閾値を設けることにより、特有の波数推定基準を設けることができる効果を奏する。
【0208】
第4手段により、データの取得回数とそれに伴う記憶容量と演算負荷を軽減できる効果を奏する。また、記憶する情報として、相関行列よりもメモリ容量が少ない、AR係数とすることができる。
第5手段により、過去制御サイクルのAR係数と平均できるので、データ拡張するためのAR係数の精度を高めたり、方位検出の精度を向上させたりできる効果を奏する。
第6手段により(第3実施形態)、データ拡張するためのAR係数として、かならず今回制御サイクルで取得したAR係数に基づいて方位検出処理を行うことができる効果を奏する。
第1から第4手段の組合せ(第1実施形態)により、次数を増加したAR係数を用いてデータ拡張ができるので、高い検出精度の向上効果を奏する。
第2から第5手段の組合せ(第4実施形態)により、データ拡張しない場合でも、AR係数の平均化によりスペクトルのバラツキを低減することができる効果を奏する。
【0209】
以上、第1〜第4実施形態は、図1に示すFMCW方式のレーダに用いる構成例を基に説明したが、FMCW方式の他のアンテナ構成にも適用することが可能である。また、データ取得からの演算を、本実施形態のマイクロコンピュータでの演算で行う他、他のデバイスやプロセッサ(FPGA,DSP,マイクロコンピュータ)等で計算させることも可能となる。
また、多周波CW、パルスレーダ等のFMCW方式以外の他の方式においても、本発明に適用することが可能である。
本実施形態において、パワースペクトルのピークを算出してターゲット数と方位を求める形態としたが、入力白色雑音の分散値を乗算しないで作成したスペクトルで推定することも可能であるので、入力白色雑音の分散値の計算を省略することもできる。さらに、パワースペクトルの代わりに高次方程式の根を求める計算を用いて、その極で方位を推定してもよい。
【0210】
本実施形態に示したMFBLP法は、特異値分解を行い、信号部分空間の疑似逆行列を求め、AR係数を求める手法なので、標準的なARスペクトル推定法よりも演算負荷は重くなる。しかし、検出する信号数に対してARモデルの次数を高めに設定しても、疑ピークを抑えたパワースペクトルが算出できるので、検出精度が高い推定結果を得ることができる。実際、ARモデルの次数を、設定可能な大きめの次数で固定することができ、MUSIC法のように信号部分空間とノイズ部分空間を選択してスペクトルを求めることができる。
特異値分解は、固有値分解の拡張方式で、特異行列(=非正則行列)や長方行列においても算出できる。特異値は、固有値の正の平方根であるので、特異値と固有値は等価な値である。
しかしながら、前述の参考文献においても、上記MFBLP法に好適な受信波数の推定法については記述されておらず、ましてや車載用レーダのような少ないチャンネル数(CH)に適用された報告もない。一般的な受信波数の推定手法として、FPE(Final Prediction Error)、AIC(Akaike Information Criterion)、MDL(Minimum Description Length)等は知られているが、いずれも演算量が多くなる上に、いずれも検出精度を確保した推定については保証されていない。
本実施形態に示したように、車載用レーダにおける方位検出にARスペクトル推定法を適用し、演算負荷が重くなる上記のFPE,AIC,MDL等の波数(又はモデル次数)推定手法を用いることなく、特異値分解による受信波数推定手法を適用する。特異値分解による受信波数推定手法を適用することにより、受信波数推定を比較的容易に実行でき、且つ上記MFBLP手法に直結できるという利点を得ることができる。
そして、上記受信波数推定結果を、計算した特異値分解による疑似逆行列に適用し、ノイズ部分空間を削除して、信号部分空間のみを抽出した検出精度の高い方位検出を行うことができる。
【0211】
なお、図1、図7、図21、図28、図30における信号処理部20Aから20Cの機能を実現するためのプログラムをコンピュータ読み取り可能な記録媒体に記録して、この記録媒体に記録されたプログラムをコンピュータシステムに読み込ませ、実行することにより、受信波から方位検出を行う信号処理を行ってもよい。なお、ここでいう「コンピュータシステム」とは、OSや周辺機器等のハードウェアを含むものとする。また、「コンピュータシステム」は、ホームページ提供環境(あるいは表示環境)を備えたWWWシステムも含むものとする。また、「コンピュータ読み取り可能な記録媒体」とは、フレキシブルディスク、光磁気ディスク、ROM、CD−ROM等の可搬媒体、コンピュータシステムに内蔵されるハードディスク等の記憶装置のことをいう。さらに「コンピュータ読み取り可能な記録媒体」とは、インターネット等のネットワークや電話回線等の通信回線を介してプログラムが送信された場合のサーバやクライアントとなるコンピュータシステム内部の揮発性メモリ(RAM)のように、一定時間プログラムを保持しているものも含むものとする。
【0212】
また、上記プログラムは、このプログラムを記憶装置等に格納したコンピュータシステムから、伝送媒体を介して、あるいは、伝送媒体中の伝送波により他のコンピュータシステムに伝送されてもよい。ここで、プログラムを伝送する「伝送媒体」は、インターネット等のネットワーク(通信網)や電話回線等の通信回線(通信線)のように情報を伝送する機能を有する媒体のことをいう。また、上記プログラムは、前述した機能の一部を実現するためのものであっても良い。さらに、前述した機能をコンピュータシステムにすでに記録されているプログラムとの組み合わせで実現できるもの、いわゆる差分ファイル(差分プログラム)であっても良い。
【0213】
なお、本実施形態において、例えばステップSa106では、予め設定した閾値よりも最大特異値の値が小さい場合には、得られた情報(複素数データ)の信頼度が低いと判定し、該当ターゲットに対しての次ステップの波数推定の処理を行わなくして、誤検出情報の提供を防いでいる。
例えば、次ステップ以降の波数推定及び方位推定の処理を行わず、当該サイクルにおけるターゲットの情報を検出できずにロストしても、レーダの認識処理として通常後ステップで行われるトラッキングによる外挿手法等を用いることにより、ロストしたターゲットの情報を疑似的に持続することができる。このような手法により、ターゲットをロストすることを回避できるので、間違った方位検出結果を出力するよりキャンセルする方が望ましいという考えに適合することができる。また、できるだけ方位検出をキャンセルしない考えにも適合でき、次ステップの波数推定を行わず、予め定められた値の任意の波数に強制的に指定する(例えば、最大次数や最小次数のいずれか)ことも可能である。このような最大特異値判定を伴った信号の波次数推定処理を行うことによって、例えばピーク検知されたターゲットの中から、ターゲット毎にさらに方位検出するか否かを判定したり、ピーク検知しない仕様としたりする場合でも効果を成すものである。そのピーク検知しない仕様とは、例えば、全ポイント、又は、任意の距離ポイントにおいて無条件に方位検知する等の処理構成のことである。
【0214】
また、本実施形態に示したデータ拡張法に代え、他の方法を用いることも可能である。例えば、抽出した複素数データに値を「0」とするデータを追加してFFT処理を行い、変換後の領域で位相の補正を行った後に、IFFT処理を行い前記位相補正による元の複素数データの領域での波形の広がりを利用しても良いし、各種のデータ外挿アルゴリズムやデータ予測アルゴリズムを適用してもよい。
【0215】
さらに、本実施形態に示した波数推定において、正規化固有値による閾値判定法だけでなく、固有値分解の有効ランク数を推定するフロベニウスノルム比などの手法を適用してもよい。
また、擬似逆行列を作成する際の波数は、例えば、データ拡張用のAR係数を算出するためには最大の波数に固定してもよく、パワースペクトルを算出する波数と独立に設定してもよい。
【符号の説明】
【0216】
1−1,1−n…受信アンテナ
2−1,2−n…ミキサ
3…送信アンテナ
4…分配器
5−1,5−n…フィルタ
6…SW
7…ADC
8…制御部
9…三角波生成部
10…VCO
20A、20B、20C…信号処理部
21…メモリ
22、22B…周波数分解処理部
23、23B…ピーク検知部
24、24B…ピーク組合せ部
25…距離検出部
26…速度検出部
27…ペア確定部
30、30A、30B、30C…方位検出部
31、31B…ターゲット確定部
32、32a、32b、32c、32B、32C…ターゲット連結処理部
40…DBF処理部
310A、310B…データ拡張部
320A、320B…MFBLP部
323、323…特異値分解部
324…波数推定部
325…擬似逆行列算出部
326A、326B、363…AR係数算出部
360…FBLP部
361…正規方程式作成部
370…係数フィルタ部
371、372…AR係数フィルタ部
380A、380B…パワースペクトル算出部
【技術分野】
【0001】
本発明は、放射された送信波に対するターゲットからの反射波を用いて、このターゲットの検出を行う、車載用に好適な電子走査型レーダ装置、受信波方向推定方法及びこれに用いる受信波方向推定プログラムに関する。
【背景技術】
【0002】
従来、車載レーダとしては、FMCW(Frequency Modulated Continuous Wave)レーダ、多周波CW(Continuous Wave)レーダ、及びパルスレーダ等の方式を利用した電子走査型のレーダが知られている。
上記各レーダにおいては、ターゲット(反射物)からの到来波(あるいは受信波)の方向検知の技術として、アレーアンテナの到来波方向推定方法が用いられている。
この到来波方向推定方法は、近年、受信アンテナのチャンネル数を増やすことなく高い分解能が得られる、ARスペクトル推定法(図34)やMUSIC(MUltiple SIgnal Classification)法等の高分解能(高精度)アルゴリズムが用いられている(特許文献1、2、3参照)。また、ARスペクトル推定法は、最大エントロピー法(MEM:Maximum Entropy Method )や線形予測法などといわれる場合もある。
これらのアルゴリズムでターゲット(反射物)からの到来波方向推定を行う場合には、複素数によって示される入力データ(複素正弦波にノイズ成分が合成されたデータ)を相関行列といった行列形式に変換してから推定処理が行われる。
【0003】
また、車載レーダに用いられる高分解能到来波方向推定方法では、ノイズ成分を抑制し推定精度を向上させるために、過去の制御サイクルの相関行列を記憶しておき、今回の制御サイクルの相関行列との平均化(又は加算)処理をしてから方向推定処理を実行している。この相関行列の平均化処理は、少ないチャンネル数によって構成される車載用レーダにとって、方位検出精度(角度精度や分離性能)の向上に大きな効果を得ることができる(特許文献2)。
また、これらの高分解能アルゴリズムは、適当な到来波(受信波)数(ARスペクトル推定法の場合はモデル次数)を設定してから推定することが必要とされる(特許文献3)。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2006−275840号公報
【特許文献2】特開2009−156582号公報
【特許文献3】特開2009−162688号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ところで、特許文献2の技術において、推定精度を高めるためには、平均化するための相関行列数を多くすることが必要となる。平均するための相関行列数を増やすためには、過去の相関行列を保持しておく期間を長くして、複数の過去の相関行列を参照する回数を増やすか、同一制御サイクルにおけるデータ取得数を増やすことが必要となる。データ量については、1回のデータ取得で生成される相関行列そのものがデータ数×データ数個の大きさとなり、演算対象のデータ量は、データ取得数に応じて増加する。また、同一制御サイクルにおけるデータ取得数を増やすことは、FMCW方式の場合、同一制御サイクルにおける三角波出力回数を増加させることになる。このように、推定精度を高めるためにデータ量を増やした場合には、演算負荷が増大することが課題である。
また、ARスペクトル推定法は、比較的演算負荷の軽いアルゴリズムであり、距離方向に数多く存在するターゲットに対して方位推定処理も数多く行うことができるので、車載用レーダとして好適な手法である。また、ARスペクトル推定法は、MUSIC法と比べると受信波数(=モデル次数)の設定にセンシティブにならなくても推定できるという利点があり、モデル次数の高いほど推定精度が高くなるという傾向がある。
しかしながら、ARスペクトル推定法においては、設定次数に対して信号受信波数が大幅に少なくノイズ成分が多い場合には、相関行列(正規方程式)の平均を行い、精度を高めたとしても、偽ピークが検出されてしまう場合があることが懸案であった。
また、小型・低コスト化が必要とされる車載用レーダのような用途においては、受信系の構成を少ないチャンネル(CH)数にすることが要求され、少ないチャンネル(CH)数に適した設定とする場合では、設定できる次数が制限される。また、仮に受信系のCH数を増やすことができたとしても、上記のARスペクトル推定法(標準的ARスペクトル推定法と定義する)においては、次数を設定できるだけであることから、より高い次数の設定と、信号受信波数に応じた適切な設定を同時に満足させることができなかった。
【0006】
本発明は、このような事情に鑑みてなされたもので、取得するデータを記憶するメモリ容量とデータ取得回数を増大することなく、検出精度を高めた方位検出ができる電子走査型レーダ装置、受信波方向推定方法及び受信波方向推定プログラムを提供することを目的とする。
【課題を解決するための手段】
【0007】
(1)本発明は、移動体に搭載される電子走査型レーダ装置であり、送信された送信波を反射したターゲットから到来する受信波を受信する複数のアンテナを含んで構成される受信部と、前記送信波及び前記受信波からビート信号を生成するビート信号生成部と、前記ビート信号を予め設定された周波数帯域幅を有するビート周波数に周波数分解して、前記ビート周波数毎に分解された前記ビート信号に基づいた複素数データを算出する周波数分解処理部と、前記ビート信号に基づいて算出された複素数データに基づいて生成される行列から算出される特異値に基づいて前記受信波の波数を推定し、該推定された波数により定められる信号部分空間に含まれる該行列の擬似逆行列に基づいて算出される係数に基づいて前記受信波の到来方向を算出する方位検出部とを備えることを特徴とする電子走査型レーダ装置である。
【0008】
(2)また、本発明は、上記発明において、前記方位検出部は、前記ビート信号に基づいて算出された前記複素数データに基づいて前記係数を算出する第1演算処理部を備え、前記第1演算処理部は、前記ビート信号に基づいて算出された前記複素数データに基づいて前記行列及びベクトルを生成するデータ行列データベクトル生成部と、前記生成した行列を特異値分解することにより前記特異値を算出する特異値分解部と、前記算出された特異値に基づいて前記受信波の波数を推定した波数推定値を算出する波数推定部と、該算出された波数推定値により定められる前記信号部分空間に含まれる前記擬似逆行列を算出する擬似逆行列算出部と、前記信号部分空間の擬似逆行列及び前記ベクトルから前記係数を算出する係数算出部とを備えることを特徴とする。
【0009】
(3)また、本発明は、上記発明において、前記方位検出部は、前記算出された複素数データを元にして、該元の複素数データよりデータ数を拡張した拡張複素数データを生成するデータ拡張部を備え、前記データ行列データベクトル生成部は、前記拡張複素数データを要素とする前記行列及び前記ベクトルを生成することを特徴とする。
【0010】
(4)また、本発明は、上記発明において、前記データ行列データベクトル生成部は、前記行列及び前記ベクトルとして、予め定められる次数に増加させた次数増加行列及び次数増加ベクトルを生成することを特徴とする。
【0011】
(5)また、本発明は、上記発明において、前記データ行列データベクトル生成部は、前記行列及び前記ベクトルとして、前記拡張複素数データによる次数を増加させずに、前記拡張複素数データのデータ数を拡張した前記行列及び前記ベクトルを生成することを特徴とする。
【0012】
(6)また、本発明は、上記発明において、前記方位検出部は、前記拡張複素数データを生成する際に元とする前記係数を、前記元の複素数データに基づいて作成される正規方程式により生成することを特徴とする。
【0013】
(7)また、本発明は、上記発明において、前記方位検出部は、前記拡張複素数データを生成する際に元とする前記係数を、前記元の複素数データに基づいて作成された前記正規方程式により生成する第2演算処理部を備え、前記データ拡張部は、前記元の複素数データと前記係数に基づいた線形予測式により前記拡張複素数データを生成することを特徴とする。
【0014】
(8)また、本発明は、上記発明において、前記係数は、自己回帰モデルを用いるスペクトル推定法において、該自己回帰モデルを示す線形方程式に基づいて算出されることを特徴とする。
【0015】
(9)また、本発明は、上記発明において、前記データ拡張部は、前記受信波の到来方向を算出する処理を繰り返し行う検知サイクルにおける、今回の検知サイクルにおいて算出された前記係数に基づいて前記拡張複素数データを生成することを特徴とする。
【0016】
(10)また、本発明は、上記発明において、前記ターゲットに対応付けられた情報を、前記検知サイクルの回数に対応付けて記憶する記憶部を備え、前記データ拡張部は、前記ターゲットに対応付けられた情報として前記記憶部に記憶されており、前記今回の検知サイクルより過去に行われた過去の検知サイクルにおいて算出された前記係数に基づいて前記拡張複素数データを生成することを特徴とする。
【0017】
(11)また、本発明は、上記発明において、前記データ拡張部は、前記今回の検知サイクルにおいて算出された前記元の複素数データと、前記ターゲットに対応付けられた情報として前記記憶部に記憶されており、前記今回の検知サイクルより過去に行われた過去の検知サイクルにおいて算出された過去の複素数データとに基づいて前記拡張複素数データを生成することを特徴とする。
【0018】
(12)また、本発明は、上記発明において、前記今回の検知サイクルと、前記過去の検知サイクルとにおいて、それぞれ検知された前記ターゲットを関連付け、前記関連付けられたターゲットに対応付けられた情報を前記記憶部に記憶させるターゲット連結処理部を備えることを特徴とする。
【0019】
(13)また、本発明は、上記発明において、前記ターゲット連結処理部は、前記今回及び前記過去の検知サイクルにおける前記ターゲットの関連付けを、距離及び相対速度、又は、距離、相対速度及び方位により行うことを特徴とする。
【0020】
(14)また、本発明は、上記発明において、前記方位検出部は、前記ターゲットに対応付けられた前記情報である前記係数を平均する係数フィルタ部を備えることを特徴とする。
【0021】
(15)また、本発明は、上記発明において、前記係数フィルタ部は、前記第1演算処理部によって算出され、前記ターゲットに対応付けられた前記係数を平均する第1係数フィルタ部を備えることを特徴とする。
【0022】
(16)また、本発明は、上記発明において、前記係数フィルタ部は、前記第2演算処理部によって算出され、前記ターゲットに対応付けられた前記係数を平均する第2係数フィルタ部を備えることを特徴とする。
【0023】
(17)また、本発明は、上記発明において、前記ビート周波数の強度値からピーク値を検出して前記ターゲットの存在を検知するピーク検知部を備え、前記方位検出部は、前記ピーク検知部によって存在が検知されたターゲットに対応する前記複素数データに基づいて、前記受信波の到来方向を算出することを特徴とする。
【0024】
(18)また、本発明は、上記発明において、前記複素数データに基づいて、前記受信波を受信する所望の方向の受信感度を高めるデジタルビームフォーミングに基づいて前記ターゲットの存在及び方位を検出するDBF部をさらに備え、前記ピーク検知部は、前記今回の検知サイクルにおけるビート周波数における前記デジタルビームフォーミングに基づいて前記ターゲットの方位を検出することを特徴とする。
【0025】
(19)また、本発明は、移動体に搭載される電子走査型レーダ装置による受信波方向推定方法であり、受信部が、送信された送信波を反射したターゲットから到来する受信波を受信する複数のアンテナを含んで構成される受信過程と、ビート信号生成部が前記送信波及び前記受信波からビート信号を生成するビート信号生成過程と、周波数分解処理部が前記ビート信号を予め設定された周波数帯域幅を有するビート周波数に周波数分解して、前記ビート周波数毎に分解された前記ビート信号に基づいた複素数データを算出する周波数分解処理過程と、前記ビート信号に基づいて算出された複素数データに基づいて生成される行列から算出される特異値に基づいて前記受信波の波数を推定し、該推定された波数により定められる信号部分空間に含まれる該行列の擬似逆行列に基づいて算出される係数に基づいて前記受信波の到来方向を算出する方位検出過程とを含むことを特徴とする受信波方向推定方法である。
【0026】
(20)また、本発明は、移動体に搭載される電子走査型レーダ装置により受信波方向推定の処理をコンピュータに実行させるためのプログラムであり、送信された送信波を反射したターゲットから到来する受信波を受信する複数のアンテナを含んで構成される受信処理手順と、前記送信波及び前記受信波からビート信号を生成するビート信号生成処理手順と、前記ビート信号を予め設定された周波数帯域幅を有するビート周波数に周波数分解して、前記ビート周波数毎に分解された前記ビート信号に基づいた複素数データを算出する周波数分解処理手順と、前記ビート信号に基づいて算出された複素数データに基づいて生成される行列から算出される特異値に基づいて前記受信波の波数を推定し、該推定された波数により定められる信号部分空間に含まれる該行列の擬似逆行列に基づいて算出される係数に基づいて前記受信波の到来方向を算出する方位検出手順とを実行させるためのプログラムである。
【発明の効果】
【0027】
以上説明したように、本発明によれば、受信部が、送信された送信波を反射したターゲットから到来する受信波を受信する複数のアンテナを含んで構成される。ビート信号生成部が前記送信波及び前記受信波からビート信号を生成する。周波数分解処理部が、前記ビート信号を予め設定された周波数帯域幅を有するビート周波数に周波数分解して、前記ビート周波数毎に分解された前記ビート信号に基づいた複素数データを算出する。方位検出部が、ビート信号に基づいて算出された複素数データに基づいて生成される行列の特異値に基づいて受信波の波数を推定し、該推定された波数に応じた数の特異値に基づいて作成される信号部分空間によって示される信号部分空間成分の擬似逆行列に基づいた係数を生成し、該生成された係数に基づいて受信波の到来方向を算出する。
これにより、方位検出部は、ターゲットの存在が検知されたビート周波数である検出ビート周波数の複素数データに基づいて生成される行列の特異値に基づいて到来波の波数を推定し定める。方位検出部は、推定された波数に応じた特異値に基づいて作成される信号部分空間の擬似逆行列に基づいた係数により受信波の到来方向を算出するので、検出精度を高めた方位検出ができる電子走査型レーダ装置及び受信波方向推定プログラムを提供することが可能となる。
【図面の簡単な説明】
【0028】
【図1】本発明の第1実施形態による電子走査型レーダ装置の構成を示すブロック図である。
【図2】送信信号と、ターゲットに反射された受信信号が入力された状態を示す図である。
【図3】受信アンテナにおける受信波の説明を行う概念図である。
【図4】ビート信号を周波数分解した結果であり、ビート周波数(横軸)とそのピーク値(縦軸)とを示すグラフである。
【図5】ピーク組合せ部24における上昇領域及び下降領域のビート周波数のマトリクスと、そのマトリクスの交点、すなわち上昇領域及び下降領域のビート周波数の組み合わせにおける距離及び相対速度とピークレベルとを示すテーブルである。
【図6】今回の検知サイクルにおけるピークのペアを確定したターゲット群毎の距離及び相対速度と周波数ポイントを示すテーブルである。
【図7】本実施形態における方位検出部の構成を示すブロック図である。
【図8】検知サイクルにおけるデータ取得処理を示すタイムチャートである。
【図9】本実施形態に適用するデータ拡張法について示す図である。
【図10】複素数データを拡張する処理について示す図である。
【図11】MFBLP法におけるデータ行列とデータベクトルの生成と擬似逆行列で表現できることを示す図である。
【図12】特異値分解の演算処理を示す図である。
【図13】信号部分空間の擬似逆行列A#から算出されるAR係数aから、白色雑音の分散値とパワースペクトルを求める演算処理を示す図である。
【図14】メモリ21に設けられるテーブルを示す図である。
【図15】AR係数の記憶方法、呼出方法を示す図である。
【図16】本実施形態の処理を示すフローチャートである。
【図17】図16のステップSa106からステップSa108までに示した信号波数推定処理の詳細を示す図(その1)である。
【図18】図16のステップSa106からステップSa108までに示した信号波数推定処理の詳細を示す図(その2)である。
【図19】AR係数の初期値を定める処理の手順を示すフローチャートである。
【図20】第2実施形態によるAR係数の初期値を定める処理の手順を示すフローチャートである。
【図21】第3実施形態による電子走査型レーダ装置の構成例を示すブロック図である。
【図22】MFBLP法におけるAR係数の平均化処理を示す図である。
【図23】FBLP法におけるAR係数の平均化処理を示す図である。
【図24】メモリ21に設けられるテーブルを示す図である。
【図25】本実施形態の処理を示すフローチャートである。
【図26】第4実施形態の方位検出部の構成を示すブロック図である。
【図27】本実施形態の処理を示すフローチャートである。
【図28】第5実施形態による電子走査型レーダ装置の構成例を示すブロック図である。
【図29】上昇領域及び下降領域それぞれのピークを組み合わせるためのテーブルを示す図である。
【図30】第6実施形態による電子走査型レーダ装置の構成例を示すブロック図である。
【図31】上昇領域及び下降領域それぞれのピークのペアを確定した結果を記憶するテーブルである。
【図32】本実施形態による電子走査型レーダ装置の方位推定特性の効果を示す図(その1)である。
【図33】本実施形態による電子走査型レーダ装置の方位推定特性の効果を示す図(その2)である。
【図34】従来のARスペクトル推定処理を示す図である。
【発明を実施するための形態】
【0029】
<ARスペクトル推定の説明>
以下、本発明の実施形態に適用するARスペクトル推定法について示す。
最初に、標準的なARスペクトル推定法(AR Spectral Estimation)について示す。ARスペクトル推定法は、MUSIC法と同じくスペクトルを推定するスペクトル推定法として知られており、ARモデル(Autoregressive Model:自己回帰モデル)を用いた推定処理を行う方法である。このようなARスペクトル推定法は、MUSIC法が部分空間法として分類される場合に、パラメトリック法として分類される。また、ARスペクトル推定法は、最大エントロピー法、線形予測法と呼ばれる場合もある。
【0030】
ARスペクトル推定法は、まず線形式によって示されるARモデルを用いてモデル化して、入力データに基づいた線形式である正規方程式(自己相関行列や共分散行列と呼ばれる行列と、右辺ベクトルや相互相関ベクトルと呼ばれるベクトルも含まれる)を作成する。さらに、正規方程式に基づいて、ARフィルタの係数(AR係数)と入力白色雑音の分散値を求めた後、そのAR係数と入力白色雑音の分散値を用いてパワースペクトルを求め推定する手法である(図34参照)。入力データには、時系列のデータの他、本実施形態におけるレーダのような空間方向のチャンネルデータに対しても適用できる。このようなARスペクトル推定法は、自己相関行列を用いた手法と共分散行列を用いた手法に大別され、自己相関行列を用いた手法として自己相関法(Autocorrelation Method)(又は、ユールウォーカー法)とバーグ法(Burg Method)があり、共分散行列を用いた方法として共分散法(Covariance Method)と改良共分散法(Modified Covariance Method)がある。また、改良共分散法は、前向き後向き線形予測法(Forward and Backward Linear Prediction Method、FBLP法)とも呼ばれる。
上記のARスペクトル推定法(以下、「標準的なARスペクトル推定法」という)は、固有値分解を行わないので、演算負荷が比較的軽いことが特色である。
【0031】
ところで、本実施形態に示すARスペクトル推定法においては、検出した信号を信号部分空間とノイズ部分空間とに分離して検出処理を行う。ARスペクトル推定法において、その信号部分空間を抽出することにより、ARモデルの次数を固定値にしていても、受信信号波数に応じたスペクトル推定処理における検出特性を適応させることができる。
このようなARスペクトル推定法において、標準的な改良共分散法(共分散法)に用いるデータ列によって示されるMFBLP法(Modified Forward and Backward Linear Prediction Method:改良前向き後向き線形予測法)を適用する[参考文献:Tufts, Kumaresan, " Estimation of Frequency of Multiple Sinusoids : Making Linear Prediction Perform Like Maximum Likelihood", IEEE Vol.70, No.9, September 1982.を参照]。このMFBLP法は、パラメトリック法と部分空間法とを組み合わせるような手法である。ARスペクトル推定法において、MFBLP法を適用することにより、共分散行列と右辺ベクトルを作成することなく、データ行列とデータベクトルから直接特異値分解を行い、疑似逆行列を求める。
なお、信号部分空間の抽出は、信号部分空間に含まれる該行列の疑似逆行列の作成により行う。
このように、本実施形態に示すARスペクトル推定法は、設定次数に対して信号受信波数が少なくノイズ成分が多い場合であっても、偽ピークの発生を低減させることができるので、ARスペクトル推定における推定精度を高めるよう、次数を増加させることが可能である。
【0032】
(第1実施形態)
以下、本発明の実施形態による電子走査型レーダ装置(FMCW方式ミリ波レーダ)について図面を参照して説明する。
図1は、同実施形態における電子走査型レーダ装置の構成を示すブロック図である。
この図において、本実施形態による電子走査型レーダ装置は、受信アンテナ1−1〜1−n、ミキサ2−1〜2−n、送信アンテナ3、分配器4、フィルタ5−1〜5―n、SW(スイッチ)6、ADC(A/Dコンバータ)7、制御部8、三角波生成部9、VCO10、信号処理部20Aを備える。
信号処理部20Aは、メモリ21、周波数分離処理部22、ピーク検知部23、ピーク組合せ部24、距離検出部25、速度検出部26、ペア確定部27、方位検出部30、ターゲット確定部31、及び、ターゲット連結処理部32を備える。
【0033】
次に、図1を参照して、本実施形態による電子走査型レーダ装置の動作を説明する。
受信アンテナ1−1〜1−nは、送信波がターゲットにて反射し、このターゲットから到来する反射波、すなわち受信波を受信する。
ミキサ2−1〜2−nは、送信アンテナ3から送信される送信波と、受信アンテナ1−1〜1−nそれぞれにおいて受信された受信波が増幅器により増幅された信号とを混合して、それぞれの周波数差に対応したビート信号を生成する。
送信アンテナ3は、三角波生成部9において生成された三角波信号を、VCO(Voltage Controlled Oscillator )10において周波数変調した送信信号をターゲットに対して送信波として送信する。
分配器4は、VCO10からの周波数変調された送信信号を、ミキサ2−1〜2−n及び送信アンテナ3に分配する。
【0034】
フィルタ5−1〜5−n各々は、それぞれミキサ2−1〜2−nにおいて生成された各受信アンテナ1−1〜1−nに対応したCh1〜Chnのビート信号に対して帯域制限を行い、SW(スイッチ)6へ帯域制限されたビート信号を出力する。
SW6は、制御部8から入力されるサンプリング信号に対応して、フィルタ5−1〜5−n各々を通過した各受信アンテナ1−1〜1−nに対応したCh1〜Chnのビート信号を、順次切り替えて、ADC(A/Dコンバータ)7に出力する。
ADC7は、SW6から上記サンプリング信号に同期して入力される、各受信アンテナ1−1〜1−n各々に対応したCh1〜Chnのビート信号を、上記サンプリング信号に同期してA/D変換してデジタル信号に変換し、信号処理部20におけるメモリ21の波形記憶領域に順次記憶させる。
制御部8は、マイクロコンピュータなどにより構成されており、図示しないROMなどに格納された制御プログラムに基づき、図1に示す電子走査型レーダ装置全体の制御を行う。
【0035】
<距離、相対速度、角度(方位)を検出する原理>
次に、図を参照し、本実施形態における信号処理部20において用いられる電子走査型レーダ装置とターゲットとの距離、相対速度、角度(方位)を検出する原理について簡単に説明する。
図2は、送信信号と、ターゲットに反射された受信信号が入力された状態を示す図である。
この図に示される信号は、図1の三角波生成部9において生成された信号をVCO10において周波数変調した送信信号と、その送信信号をターゲットが反射して、受信された受信信号である。この図の例では、ターゲットが1つの場合を示す。
図2(a)から判るように、送信する信号に対し、ターゲットからの反射波である受信信号が、ターゲットとの距離に比例して右方向(時間遅れ方向)に遅延されて受信される。さらに、ターゲットとの相対速度に比例して、送信信号に対して上下方向(周波数方向)に変動する。そして、図2(a)にて求められたビート信号の周波数変換(フーリエ変換(FFT)やDTC、アダマール変換、ウェーブレッド変換など)後において、図2(b)に示されるように、ターゲットが1つの場合、上昇領域及び下降領域それぞれに1つのピーク値を有することなる。ここで、図2(a)は横軸が周波数、縦軸が強度を示す。
【0036】
周波数分解処理部22は、メモリ21に蓄積されたビート信号のサンプリングされたデータから、三角波の上昇部分(上り)と下降部分(下り)とのそれぞれについて周波数分解、例えばフーリエ変換などにより離散時間に周波数変換する。すなわち、周波数分解処理部22は、ビート信号を予め設定された周波数帯域幅を有するビート周波数に周波数分解して、ビート周波数毎に分解されたビート信号に基づいた複素数データを算出する。
その結果、図2(b)に示すように、上昇部分と下降部分とにおいて、それぞれの周波数分解されたビート周波数毎の信号レベルのグラフが得られる。
そして、ピーク検知部23は、図2(b)に示すビート周波数毎の信号レベルからピーク値を検出し、ターゲットの存在を検出するとともに、ピーク値のビート周波数(上昇部分及び下降部分の双方)をターゲット周波数として出力する。
【0037】
次に、距離検出部25は、ピーク組合せ部24から入力される上昇部分のターゲット周波数fuと、下降部分のターゲット周波数fdとから、下記式により距離rを算出する。式中の「・」は、乗算を示す。
r={C・T/(2・Δf)}・{(fu+fd)/2}
また、速度検出部26は、ピーク組合せ部24から入力される上昇部分のターゲット周波数fuと、下降部分のターゲット周波数fdとから、下記式により相対速度vを算出する。
v={C/(2・f0)}・{(fu−fd)/2}
上記距離r及び相対速度vを算出する式において、
C :光速度
Δf:三角波の周波数変調幅
f0 :三角波の中心周波数
T :変調時間(上昇部分/下降部分)
fu :上昇部分におけるターゲット周波数
fd :下降部分におけるターゲット周波数
【0038】
次に、本実施形態における受信アンテナ1−1〜1−nについて示す。
図3は、受信アンテナにおける受信波の説明を行う概念図である。
この図に示されるように、受信アンテナ1−1〜1−nは、間隔dによりアレー状に配置される。受信アンテナ1−1〜1−nには、アンテナを配列している面に対する垂直方向の軸に対して角度θ方向から入射される、ターゲットからの到来波(入射波、すなわち送信アンテナ3から送信した送信波に対するターゲットからの反射波)が入力する。このとき、その到来波は、受信アンテナ1−1〜1−nにおいて同一角度にて受信される。この同一角度、例えば角度θ及び各アンテナの間隔dにより求められる位相差「dn−1・sinθ」が、各隣接する受信アンテナ間にて発生する。
その位相差を利用して、アンテナ毎に時間方向に周波数分解処理された値を、アンテナ方向にさらにフーリエ変換するデジタルビームフォーミング(DBF)や高分解能アルゴリズム等の信号処理にて上記角度θを検出することができる。
【0039】
<信号処理部20における受信波に対する信号処理>
次に、信号処理部20Aにおける受信波に対する信号処理について示す。
メモリ21は、波形記憶領域が設けられている。メモリ21は、ADC7によってA/D変換された受信信号の時系列データ(上昇部分及び下降部分)を、アンテナ1−1〜1−n毎に対応させて、上記波形記憶領域に記憶している。例えば、上昇部分及び下降部分それぞれにおいて256個をサンプリングした場合、2×256個×アンテナ数のデータが、上記波形記憶領域に記憶される。
周波数分解処理部22は、例えばフーリエ変換などにより、各Ch1〜Chn(各アンテナ1−1〜1−n)に対応するビート信号それぞれを、予め設定された分解能に応じて周波数成分に変換することによりビート周波数を示す周波数ポイントと、そのビート周波数の複素数データを出力する。例えば、アンテナ毎に上昇部分及び下降部分それぞれが256個のサンプリングされたデータを有する場合、アンテナ毎の複素数の周波数領域データとしてビート周波数に変換され、上昇部分及び下降部分それぞれにおいて128個の複素数データ(2×128個×アンテナ数のデータ)となる。また、上記ビート周波数は周波数ポイントにて示されている。
ここで、アンテナ毎の複素数データには、上記角度θに依存した位相差があり、それぞれの複素数データの複素平面上における絶対値(受信強度あるいは振幅など)は等価である。
【0040】
ピーク検知部23は、周波数変換されたビート周波数の三角波の上昇領域及び下降領域それぞれ強度のピーク値を、複素数データを用いて信号強度(または振幅など)におけるピークから、予め設定された数値を超えるピーク値を有するビート周波数を検出することにより、ビート周波数毎のターゲットの存在を検出して、ターゲット周波数を選択する。
したがって、ピーク検知部23は、いずれかのアンテナにおける複素数データ又は、全アンテナの複素数データの加算値を周波数スペクトル化することにより、スペクトルの各ピーク値がビート周波数、すなわち距離に依存したターゲットの存在として検出することができる。全アンテナの複素数データの加算により、ノイズ成分が平均化されてS/N比が向上する。
【0041】
ピーク組合せ部24は、ピーク検知部23から入力される図4に示すビート周波数とそのピーク値について、上昇領域及び下降領域それぞれのビート周波数とそのピーク値をマトリクス状に総当たりにて組み合わせ、すなわち上昇領域及び下降領域それぞれのビート周波数を全て組み合わせて、順次、距離検出部25及び速度検出部26へ出力する。ここで、図4は、横軸がビート周波数の周波数ポイントを示し、縦軸が信号のレベル(強度)を示している。
距離検出部25は、順次入力される上昇領域及び下降領域それぞれの組み合わせのビート周波数を加算した数値によりターゲットとの上記距離rを演算する。
また、速度検出部26は、順次入力される上昇領域及び下降領域それぞれの組み合わせのビート周波数の差分によりターゲットとの上記相対速度vを演算する。
【0042】
ペア確定部27は、入力される上記距離r、相対速度v及び下降、上昇のピーク値レベルpu、pdにより、図5に示すテーブルを生成し、ターゲット毎に対応した上昇領域及び下降領域それぞれのピークの適切な組み合わせを判定し、図6に示すテーブルとして上昇領域及び下降領域それぞれのピークのペアを確定し、確定した距離r及び相対速度vを示すターゲット群番号をターゲット確定部31へ出力する。そして、周波数分解処理部22に、ペアが確定した周波数ポイントを送り、方位検出部60へ送る複素数データを決定する。図6にはターゲット群番号に対応して、距離、相対速度及び周波数ポイント(上昇領域及又は下降領域)が記憶されている。図5及び図6のテーブルは、ペア確定部27の内部記憶部に記憶されている。ここで、各ターゲット群は、方向が決定されていないため、電子走査型レーダ装置におけるアンテナアレーの配列方向に対する垂直軸に対して、受信アンテナ1−1〜1−nの配列方向に平行な横方向の位置は決定されていない。
【0043】
ここで、ペア確定部27は、例えば、過去の検知サイクルにて、最終的に確定した各ターゲットとの距離r及び相対速度vから今回の検知サイクルにて予測される値を優先してターゲット群の組み合わせの選択を行う等の手法を用いることもできる。
【0044】
ターゲット確定部31は、ペア確定部27から入力される図6の距離r、相対速度v、周波数ポイントと、方位検出部30によって検出されたターゲットの方位とを結びつけた後、ターゲット連結処理部32へ出力する。
ターゲット連結処理部32は、メモリ21に記憶されている過去の検知サイクルにおけるターゲットを結びつけた後、ターゲット毎に過去検知サイクル(図8)において記録されたAR係数を方位検出部30へ出力する。
また、ターゲット連結処理部32は、今回検知サイクル(図8)において算出されたAR係数に対して、ターゲット確定部31から出力される距離、相対速度及び方位の識別情報を付して、メモリ21に記録する。
【0045】
方位検出部30は、高分解能アルゴリズムのARスペクトル推定処理によるスペクトル推定処理を行い、そのスペクトル推定処理の結果に基づいて対応するターゲットの方位を検出して、ターゲット確定部31へ出力する。
このような方位検出部30は、ビート信号に基づいて算出された複素数データであって、データ数を拡張させた拡張複素数データを生成する。方位検出部30は、その拡張複素数データを要素とするデータ行列の特異値に基づいて受信波の波数を推定する。また、方位検出部30は、該推定された波数に応じた個数の特異値に基づいて作成される信号部分空間によって示される信号部分空間の擬似逆行列に基づいたAR係数を生成し、該生成されたAR係数に基づいて受信波の到来方向を算出する。
また、方位検出部30が生成する拡張複素数データは、今回検知サイクルにおいて取得された複素数データ及び今回の検知サイクルにて算出されるAR係数と、過去検知サイクルにおいて取得されたビート信号に基づいて算出されたAR係数とに基づいて生成される。
ターゲット確定部31は、ペア確定部27から入力される図6の距離r、相対速度v、周波数ポイントと、方位検出部30によって検出されたターゲットの方位とを結びつけて現在の状態を確定し出力する。
【0046】
以下、スペクトル推定処理において高分解能アルゴリズムとして知られるARスペクトル推定法を用いる場合の構成例について、より具体的に示す。
図7は、本実施形態における方位検出部の構成を示すブロック図である。
図7に示される方位検出部30Aとターゲット連結処理部32aとは、図1に示した方位検出部30とターゲット連結処理部32との一態様である。
方位検出部30Aは、データ拡張部310A、MFBLP部320A、FBLP部360A、及び、パワースペクトル算出部380Aを備える。
【0047】
データ拡張部310Aは、受信波の到来方向を算出する処理を繰り返し行う検知サイクルにおける今回の検知サイクルにおいて取得された複素数データ、及び、過去の検知サイクルにおいて算出されたAR係数から、データ数を増加させた拡張複素数データを生成する。
なお、今回の検知サイクルにおいて取得された複素数データ(n)は、周波数分解処理部22が周波数分解したビート周波数(上昇と下降のいずれか又は両方)に応じた複素数データである。
また、データ拡張部310AにおけるAR係数(n−1)は、後述のMFBLP部320Aによって過去の制御サイクルにおいて算出されたものである。MFBLP部320Aによって、今回の制御サイクルにおいて算出されたAR係数をAR係数1(n)として示すと、過去(前回)の制御サイクルにおいて算出されたAR係数は、AR係数1(n−1)として示される。
データ拡張部310Aは、受信波の到来方向を算出する処理を繰り返し行う検知サイクルにおける今回の検知サイクルにおいて取得された複素数データ、及び、今回の検知サイクルにおいて算出されたAR係数と、過去の検知サイクルにおいて算出されたAR係数とから、データ数を増加させた拡張複素数データ(n)を生成する。
データ拡張部310Aは、データ数を拡張する元の複素数データ(n)に基づいて設定可能な第2の次数(M)より増加させ、拡張複素数データを生成する。
【0048】
なお、新規(最初)に検知したターゲットの制御サイクルにおいては、データ拡張部310AにおけるAR係数は、後述のFBLP部360によって、新規にターゲットを検知した制御サイクルにおいて算出されたものである。FBLP部360によって新規にターゲットを検知した制御サイクルにおいて算出されたAR係数をAR係数2(n)として示すと、新規にターゲットを検知した次(2回目)の制御サイクルにおいて算出されたAR係数は、AR係数2(n−1)として示され(ただし、nは2である)、2回目の制御サイクルにおいて読み出される。
データ拡張部310Aは、過去の検知サイクルにおいて算出されたAR係数として、新規にターゲットを検知した検知サイクルにおいては、FBLP部360Aによって生成されたAR係数2(n)(ただし、n=1)に基づき、2回目の検知サイクルにおいては、同じAR係数2(n)をAR係数2(nー1)にした係数に基づき、3回目以降の検知サイクルにおいては、MFBLP部320Aによって生成されたAR係数1(n−1)に基づいてデータ拡張する。
【0049】
MFBLP部320A(第1演算処理部)は、拡張複素数データ(n)から作成したデータ行列とデータベクトルに基づいて、第1の次数のAR係数(AR係数1(n))と白色雑音の分散値とを算出する。
このようなMFBLP部320Aは、データ行列・ベクトル作成部321A、特異値分解部323、波数推定部324、擬似逆行列算出部325、及び、AR係数算出部326Aを備える。
【0050】
データ行列・ベクトル作成部321Aは、「今回検知サイクル」において、データ拡張部310Aによってデータ拡張された拡張複素数データから導かれるデータ行列とデータベクトルを作成する。
【0051】
特異値分解部323は、「今回検知サイクル」において導かれたデータ行列に基づいて特異値分解処理を行い、特異値を算出する。
【0052】
波数推定部324は、特異値分解部323による特異値分解処理により算出された特異値から最大の値を示す特異値を判定する。波数推定部324は、それぞれ算出された特異値を、算出された特異値の最大の値に基づいて正規化する。波数推定部324は、正規化された特異値を予め定められる閾値に基づいて判定し、その判定結果に基づいて後段の処理の波数を選択する。
【0053】
擬似逆行列算出部325は、特異値分解部323により算出された特異値から、波数推定部324において判定された波数に応じて定められる信号部分空間の疑似逆行列を作成する。この信号部分空間の疑似逆行列を波数推定部324において判定された波数に応じて作成することにより、ノイズ成分を除去することができる。
【0054】
AR係数算出部326Aは、擬似逆行列算出部325によって作成された信号部分空間の疑似逆行列と、データ行列・ベクトル作成部321Aによって、「今回検知サイクル」において導かれたデータ行列とから、AR係数と、入力白色雑音の分散σ2を算出する。このように、AR係数算出部326Aは、検知サイクルに応じて、ターゲットの存在が検知されたビート周波数である検出ビート周波数の複素数データに基づいたAR係数と、入力白色雑音の分散σ2を導くことができる。また、AR係数算出部326Aは、パワースペクトル算出部380Aへ、導かれたAR係数(AR係数1(n))と入力白色雑音の分散σ2を出力する。また、AR係数算出部326Aは、ターゲット連結処理部32aに、導かれたAR係数1(n)を出力する。
パワースペクトル算出部380Aは、そのAR係数1(n)と入力白色雑音の分散σ2に基づいて導かれるパワースペクトルから受信波の到来方向を算出する。
【0055】
FBLP部360A(第2演算処理部)は、複素数データ(n)から作成した正規方程式に基づいて、第2の次数のAR係数(AR係数2(n))を算出する。
このようなFBLP部360Aは、正規方程式作成部361及びAR係数算出部363Aを備える。
正規方程式作成部361は、周波数分解処理部22が周波数分解したビート周波数(上昇と下降のいずれか又は両方)に応じた複素数データのそれぞれから導かれ、ARスペクトル推定における第2の次数の正規方程式を作成する。
【0056】
AR係数算出部363Aは、正規方程式作成部361によって作成された「今回検知サイクル」における第2の次数の正規方程式から導かれる第2の次数のAR係数(AR係数2(n))を算出する。このように、AR係数算出部363Aは、今回検知サイクルにおいて検知された受信波によるビート周波数に応じた複素数データに基づいて算出される第2の次数のAR係数を得、後段のデータ拡張のための係数とする。
また、AR係数算出部363Aは、ターゲット連結処理部32aへ、導かれたAR係数(AR係数2(n))を出力する。
【0057】
なお、本実施形態において、データ拡張部310Aが第1手段として機能する。データ行列・ベクトル作成部321A、特異値分解部323、擬似逆行列算出部325及びAR係数算出部326Aが第2手段として機能する。波数推定部324が第3手段として機能する。ターゲット連結処理部32aが第4手段として機能する。FBLP部360が第6手段として機能する。
【0058】
図8は、検知サイクルにおけるデータ取得処理を示すタイムチャートである。
図8には、今回制御(検知)サイクルからさかのぼって、過去に行われた過去制御(検知)サイクルが示されている。
各サイクルでは、1回のデータ取得が行われ、その1回のデータ取得を三角の波形で示す。三角の波形は、FMCW方式によって変調された信号を示し、右上がりのタイミングにおいて上り、右下がりのタイミングにおいて下りの検知が行われる。
また、現在データ取得されている制御(検知)サイクルを「今回制御(検知)サイクル」といい、「今回制御(検知)サイクル」より過去に行われた制御(検知)サイクルを「過去制御(検知)サイクル」という。
【0059】
<ARモデルを用いた正規方程式の作成処理の原理>
次に、ARモデルを用いた正規方程式の作成処理について、改良共分散法(前向き後向き線形予測法)を例にして詳細に示す。
共分散行列を用いた正規方程式を式(1)に示す。
【0060】
【数1】
【0061】
式(1)において、左辺が共分散行列CxxとAR係数ベクトルaの積であり、右辺が右辺ベクトルcxxである。
共分散行列Cxxの要素は、式(2)として示される関係式(改良共分散関数)によって導かれる。
【0062】
【数2】
【0063】
式(2)において、x(n)は、複素数データを示し、「*」は、複素共役を示す。
また、右辺ベクトルcxxの要素は、式(2)において、kの値を「0」にすることにより導かれる。
以下、具体的な構成として5チャンネルのデータに基づいて3次の処理を行う場合を例として示す。モデル次数は任意に設定できるが、5チャンネルのデータの場合、改良共分散法では3次が最大となる。データのチャンネル数をさらに多くすると、正規方程式に適用できる次数も大きくなり、適用するモデル次数の柔軟性を高めることができる。
モデル次数を3次とした場合、共分散行列Cxxは、3行3列の行列式で表すことができ、その式を式(3)として示す。
【0064】
【数3】
【0065】
式(3)において、行列の各要素Cx3(k,j)は、複素数を示す。なお、式(2)におけるx(n)、すなわち、(x(0)、x(1)、x(2)、x(3)、x(4))は、それぞれが複素数データを示す。
式(3)に示されるように、共分散行列Cxxは、式(4)として示される関係があることから、エルミート行列(複素数対称行列)となる。
【0066】
【数4】
【0067】
また、同様に、3次の処理を行う場合の右辺ベクトルcxxを式(5)として示す。
【0068】
【数5】
【0069】
正規方程式とAR係数の関係を示した。本実施形態におけるFBLP部360における正規方程式作成部361は、上記の式(1)、式(2)に従って正規方程式を作成する。FBLP部360は、上記関係式を適用し、FBLP法によりAR係数を算出する。このFBLP法により算出されたAR係数は、複素数データを拡張する演算処理に用いる。
なお、本実施形態におけるスペクトル推定処理においては、上記のFBLP法に代え、拡張された複素数データに基づいて作成されるデータ行列から、後述のMFBLP法により算出されるAR係数に基づいて算出される。
【0070】
<検知した複素数データを拡張させる線形予測処理(データ拡張法)の原理>
続いて、図9と図10を参照し、検知した複素数データを拡張させるデータ拡張法について示す。
ARスペクトル推定法は、データ数(データ長)と次数を増やすことにより検出精度を高めることができる。
本実施形態においては、線形予測処理によるデータ拡張を行い、元となる複素数データよりデータ数を拡張させる。
図9は、本実施形態に適用するデータ拡張法について示す図である。
既知のN個の元データから、その既知の元データの領域に隣接する領域のデータを式(6)による演算式により拡張する。
【0071】
【数6】
【0072】
式(6)において、xハット(n)は、生成されるデータ(生成データ)を示し、aハット(i)は、AR係数を示し、x(n−i)は、元データを示す。ただし、Lは拡張データ数を示し、Mはデータ拡張を行う次数を示し、nは(N+1)からLまでの整数を示す。
【0073】
図9(a)に示すように、この式(6)による演算処理により、既知のN個の元データから拡張されるデータ(拡張データ)は、既知の元データを含めてL個に拡張した拡張データを得る場合を示している。このようなデータ拡張法を、Burg法に適用した場合についての報告(データ拡張Burg法)がある[参考文献:島村,鈴木、“Burg法のためのデータ予測”、電子情報通信学会論文誌、’94/8 Vol.J77-A No.8参照]。
【0074】
本実施形態では、前に示すデータ拡張方法を、複素数データを対象データとする後述のMFBLP法に適用する。
【0075】
本実施形態のデータ拡張方法を、図9(b)のように複素数データについて適用し、前向きの線形予測だけでなく、後向きの線形予測を行い、データの前後で拡張できるようにした(図10)。コンピュータ計算実験等の研究の結果、参考文献にある実数データによるBurg法以外の本実施形態の方法においても安定した推定精度を保てることを検証した。
【0076】
次に図を参照し複素数データを拡張する処理について、より詳細に示す。
図10は、複素数データを拡張する処理について示す図である。
最初に、図10(a)において、前向き線形予測式を用いて複素数データを拡張する処理について示す。
図に示されるx(1)、x(2)、x(3)、x(4)、x(5)は、拡張処理の対象(元データ)となる複素数データである。
これらの元データに対し、連続するようにデータを拡張する場合を示す。
ここで、データx(1)からx(5)の方向に線形予測する処理を前向きとし、その逆方向を後向きとする。
【0077】
まず、前向き線形処理を行う演算式(前向き線形予測式)を式(7)として示す。
【0078】
【数7】
【0079】
式(7)において、xfハット(n)は、生成されるデータ(生成データ)を示し、aハット(i)は、AR係数を示し、x(n−i)は、元データを示す。ただし、Mは、データ拡張を行う次数を示す。
前向き線形処理の対象とする元データは、次数が3の場合は(x(3)、x(4)、x(5))で、次数が5の場合は(x(1)、x(2)、x(3)、x(4)、x(5))のいずれかである。
上記に示したグループの元データを、式(7)に適用することにより、前向き方向の予測データを得ることができる。
また、各グループ内のデータの順序を逆にして、式(7)に示した前向き線形処理を行う演算式を適用することにより、後向き方向のデータを得ることもできる。
【0080】
次に、図10(b)において、後向き線形予測式を用いて複素数データを生成する処理について示す。
同じ元データを用いて、後向き線形処理を行う演算式(後向き線形予測式)を式(8)として示す。
【0081】
【数8】
【0082】
式(8)において、xbハット(n)は、生成されるデータ(生成データ)を示し、a*ハット(i)は、AR係数の複素共役を示し、x(n+i)は、元データを示す。ただし、Mは、データ拡張を行う次数を示す。
後ろ向き線形処理の対象とする元データは、次数が3の場合は(x(1)、x(2)、x(3))で、次数が5の場合は(x(1)、x(2)、x(3)、x(4)、x(5))のいずれかである。
上記に示したグループの元データを、式(8)に適用することにより、後向き方向の予測データを得ることもできる。
また、各グループ内のデータの順序を逆にして、式(8)に示した後向き線形処理を行う演算式を適用することにより、前向き方向のデータを得ることもできる。
【0083】
次に、図10(c)において、前向き線形予測式と後向き線形予測式とを用いて複素数データを生成する処理について示す。
この処理では、式(7)に示した前向き線形処理を行う演算式と、式(8)に示した後向き線形処理を行う演算式をそれぞれ用いる。
2つの演算式をそれぞれ用いることにより、元データの順序を反転させることなく、前方の予測演算処理と、後方の予測演算処理を行うことができる。
3次でデータ拡張する場合、前向き線形処理の対象とする元データは、(x(3)、x(4)、x(5))であり、後向き線形処理の対象とする元データは、(x(1)、x(2)、x(3))である。
また、5次でデータ拡張する場合、前向き線形処理の対象及び後向き線形処理の対象とする元データは、いずれも(x(1)、x(2)、x(3)、x(4)、x(5))である。
図10(d)は、3次の前向き線形処理及び後向き線形処理によりデータ拡張する場合を示す図である。
実数部と虚数部に分けて示した複素数データ(x(1)、x(2)、x(3)、x(4)、x(5))は、2つの曲線としてそれぞれ示される。実線が、実数部の変化を示し、破線が、虚数部の変化を示す。図10(c)に示したように、5チャンネルのデータに基づいて、3次のデータ拡張処理をするには、連続する3つのデータの組が、実数部と虚数部でそれぞれ2組得られる。それぞれの組の複素数データ(実数部と虚数部)は、式(7)と式(8)に示す前向きと後向きの線形予測式の複素数x(n−1)またはx(n+1)に代入される。
上記に示した、3通りの予測演算処理のいずれかを適用することにより、前方のデータ拡張処理と、後方のデータ拡張処理を行うことができる。
【0084】
<MFBLP法によるAR係数の算出処理の原理>
次に図11から図13を参照し、MFBLP法における特異値分解処理について示す。
最初に、MFBLP法を適用するデータ行列の生成と、そのデータ行列の特異値分解について示す。
図11は、MFBLP法におけるデータ行列とデータベクトルの生成と擬似逆行列で表現できることを示す図である。
AR係数を導出するための連立一次方程式を式(9)として定義する。
【0085】
【数9】
【0086】
式(9)におけるデータ行列Aとデータベクトルhとは、チャンネル(CH)ごとに算出される複素数データ(CH)を要素とする行列とベクトルとをそれぞれ示す。ベクトルgは、AR係数ベクトルを示す。
また、式(9)を複素数データによって示される要素に展開した式を式(10)として示す。
【0087】
【数10】
【0088】
この式(10)において、Nは、複素数データのデータ数を示し、Mは、次数を示す。データ行列Aとデータベクトルhは、データ拡張されているため、Nが拡張後のデータ数Neを示し、Mを増加後の次数Meを示す。
このデータ行列Aは、上下に2分割されたブロック行列として定義される。上段側のブロック行列はテープリッツ(toeplitz)行列であり、下段側のブロック行列は複素共役のハンケル(Hankel)行列である。
また、データベクトルhは、データ行列Aと同様に上下に2分割でき、上段側は複素数データのM番目からN番目までの複素数データを要素として構成され、下段側はデータ1番目から(N-M)番目までの複素数データに対応し複素共役となる複素数データを要素として構成される。
【0089】
本実施形態のようにデータ数(CH)を拡張することにより、元のデータ(CH)数から設定可能な次数Mよりも、さらに高次のMeに設定できる。これにより、MFBLP法を有効に利用することができる。つまり、ARスペクトル推定法において、高次であるほど推定精度が良くなるという特性を引き出すことができる。
また、次数を増加できない状況においても、データ行列とデータベクトルの要素数が拡張されるので、スペクトル推定精度が向上する。
なお、データ行列Aとデータベクトルhの上段側は、前方線形予測法( Modified Forward Linear Prediction Method : MFLP、=共分散法 )として使用することができ、下段側は、後方線形予測法( Modified Backward Linear Prediction Method : MBLP )として使用することができる。
また、式(9)は、一般化逆行列(疑似逆行列)による式(11)として展開することができる。
【0090】
【数11】
【0091】
式(11)において、A#は、データ行列Aの疑似逆行列を示す。
疑似逆行列A#は、データ行列Aの行数mと列数nの関係が(m>n)の場合、式(12)として示すように「過(優)決定方程式」となり、左疑似逆行列で計算できる。
【0092】
【数12】
【0093】
また、疑似逆行列A#は、データ行列Aの行数と列数の関係が(m<n)の場合、式(13)として示すように「劣決定方程式」となり、右疑似逆行列で計算できる。
【0094】
【数13】
【0095】
式(12)又は式(13)を用いることにより、擬似逆行列A#を求めることができる。
【0096】
続いて、特異値分解の演算処理について説明する。
図12は、特異値分解の演算処理を示す図である。
特異値分解演算処理の計算アルゴリズムは、任意のアルゴリズムを用いることができ、特に限定することはない。データ行列Aの特異値分解の演算式(Autonne-Eckart-Young定理)を式(14)として示す。
【0097】
【数14】
【0098】
式(14)において、Uは、データ行列Aの左特異ベクトル(AHAの固有ベクトル)であり、Vは、データ行列Aの右特異ベクトル(AAHの固有ベクトル)である。また、式(14)を式(15)として展開することができる。
【0099】
【数15】
【0100】
式(15)として示されるように、データ行列Aと、データ行列Aの左特異ベクトルU(AHAの固有ベクトル)と、データ行列Aの右特異ベクトルV(AAHの固有ベクトル)とに基づいて、部分行列Σが算出される。ただし、データ行列Aの左特異ベクトルUと右特異ベクトルVは、式(16)として示すようにユニタリ行列である。
【0101】
【数16】
【0102】
この部分行列Σは、式(17)として示されるように、その特異値σiを対角要素とする対角行列である。
【0103】
【数17】
【0104】
その結果から、特異値は、固有値の正の平方根であるので、固有値と等価な値として扱うことができる。
【0105】
特異値分解の式(15)、式(16)として示された結果から、擬似逆行列を式(18)として示す演算式により算出する。
【0106】
【数18】
【0107】
式(18)において、rは、擬似逆行列A#のランク(階数)を示す。また、部分行列Σの逆行列を式(19)として示す。
【0108】
【数19】
【0109】
また、式(18)は、式(20)として示すことができる。
【0110】
【数20】
【0111】
このようにランクrの値を適当な値に設定し、(特異値σi)−1が0に近い値の特異値(微小特異値)を切り捨ててσi−1を0と置き、信号部分空間の擬似逆行列A#を算出することができる(例えば、ランクr=2の場合には、Σ−1=diag(σ1−1,σ2−1,0,・・・,0)である)。
なお、微小特異値の切り捨てについては、例えば、後述の波数推定数(図17、図18)により定める。
【0112】
また、式(21)として示すように、式(12)及び式(13)として示した左疑似逆行列も右疑似逆行列も、特異値分解からの擬似逆行列A#から計算することができる。
【0113】
【数21】
【0114】
上記に示したように、特異値分解することにより、擬似逆行列のランクを設定することができる。また、データ行列が正方行列でない場合であっても、そのまま擬似逆行列を算出することができる。さらに、過・劣決定に左右されること無く、計算精度を高めることができる。これにより、算出される解が安定する。
【0115】
続いて、信号部分空間の擬似逆行列A#からAR係数aを算出する処理について示す。
図13は、信号部分空間の擬似逆行列A#から算出されるAR係数aから、白色雑音の分散値とパワースペクトルを求める演算処理を示す図である。
この図13に示されるMFBLP法においても、基本的には、AR係数が導かれた後の処理は、標準的なARスペクトル推定と同様の演算処理により導くことができる。
以上に示した演算処理を式(22)として整理する。式(22)は、信号部分空間のAR係数aを算出する演算式である。
【0116】
【数22】
【0117】
式(22)において、Σ-1は式(23)として示される。
【0118】
【数23】
【0119】
先に算出した疑似逆行列A#を式(22)に代入することによりAR係数を算出することができる。
なお、特異値を切り捨てる数を決定するランクrの値は、波数推定結果に応じて設定することができる。また、ランクrの値は、データ拡張の演算処理のためのランクrの値と、パワースペクトルを算出する演算処理のためのランクrの値を別の値にすることもできる。例えば、データ拡張の演算処理のためのランクrの値は、ランクrの設定可能な範囲の最大値に固定してもよい。このようにして算出されたAR係数aから、白色雑音の分散値を算出する。
【0120】
続いて、式(22)により導かれるARパラメータ推定値(AR係数a)に基づいて、入力白色雑音の分散σv2(ハット)を導く関係式を式(24)として示す。
【0121】
【数24】
【0122】
ARモデルによる線形予測では、予測値と観測値の差(予測誤差)の平均2乗誤差や最小2乗誤差が最小となる条件から、この正規方程式が導かれる。
この正規方程式を一般的な手法により解くことにより、AR係数が導かれる。
また、式(24)によって算出される入力白色雑音の分散σv2(ハット)に基づいて、パワースペクトルSxx(ω)を算出する演算式を式(25)として示す。
【0123】
【数25】
【0124】
式(25)において、ωは角速度を示し、HAR(ω)は、角速度ωにおけるARフィルタの伝達関数からの周波数特性を示し、Svv(ω)は、角速度ωにおける入力白色雑音のパワースペクトルを示し、Svv(ω)=σv2と表せる。この角速度ωは、本実施形態に示すレーダ装置のような方向検出に利用する場合には、受信波の位相差に換算する。
以上に示した演算式を用いることにより、ターゲットの方向と合致したピークの特徴を持つスペクトルを導くことができる。
なお、入力白色雑音の分散値を乗算しないで作成したスペクトルによって、パワースペクトルの分布を推定することも可能である。パワースペクトルの分布(スペクトルの形状)は、変わらないので、入力白色雑音の分散値を乗算する演算を省略することもできる。
【0125】
次に、本実施形態におけるターゲットに対応付けて記憶されるAR係数を関連付ける具体的な処理について説明する。
このAR係数の関連付け処理は、図7における方位検出部30AのAR係数算出部326A(363A)及びターゲット連結処理部32aが主として行う処理である。
図14は、メモリ21に設けられるテーブルを示す図である。
ターゲット連結処理部32aは、データ拡張部310Aにおけるデータ拡張処理を行うため、図14に示すテーブルにおいて、ターゲット毎に、今回のターゲット群(t)と、確定した過去のターゲットデータから予測されたターゲット(t)と、過去に確定しているターゲット(t−1)とを結びつけるため以下の処理を行う。
【0126】
この図14における項目(t−1)の列は、1サイクル前(前回)の検知サイクルの結果を示す。
各検知サイクルの結果としては、それぞれ、確定されたターゲット毎に距離r、縦位置long_d(アンテナの配列方向に対して垂直方向)、横位置late_d(アンテナの配列方向に対して平行方向の位置)、ターゲットとの相対速度velo(すなわちv)、上りピーク周波数ポイントf_up、上りピーク周波数時のAR係数AR_C_up、下りピーク周波数ポイントf_dwn、下りピーク周波数時のAR係数AR_C_dwnが、メモリ21に、図14のテーブル形式により格納されている(正確には上りピーク周波数時のAR係数AR_C_upと下りピーク周波数時のAR係数AR_C_dwnの記憶領域は他より大きくなるが、表を例示するうえで便宜上同じとしている)。ここで、ターゲットの上記縦位置long_dと横位置late_dは、ターゲットとの角度(受信波の到来方向の角度)及び距離rとから求められる。角度がθであり距離rである場合、縦位置long_dはr・cosθにより、横位置late_dはr・sinθにより算出される。
【0127】
また、ターゲット連結処理部32aは、過去に確定しているターゲットの距離r、縦位置long_dと横位置late_d及び相対速度veloとから、今回サイクル時の各ターゲットの距離r、縦位置long_dと横位置late_d及び相対速度、ピーク周波数ポイントを予測しておく。例えば、縦位置long_dと横位置late_dとピーク周波数ポイントの予測は、前回の距離r、縦位置long_dと横位置late_d及び相対速度に基づいて検知サイクル周期後の時間における移動可能な範囲を求める。相対速度の予測は、過去何サイクルかの相対速度値推移の変化の傾き等を算出して予測することができる。
例えば、ターゲット連結処理部32aは、過去に確定している結果から予測した距離r、縦位置long_dと横位置late_dとピーク周波数ポイント及び相対速度それぞれに対応して、予め設定された移動可能範囲と周波数ポイント範囲、及び相対速度範囲を設けて、今回サイクル時で計算された各値がその範囲内に入るか否かで結びつけを行い、範囲外の場合は異なるターゲットであると判断する。
【0128】
そして、ターゲット連結処理部32aは、図14のテーブルにおいて、今回の検知サイクルにおけるターゲットが、過去のターゲットと結びついた場合、今回の検知サイクルの結果を(t−1)の結果に移し、次のサイクルの予測の結果を計算する。
また、ターゲット連結処理部32aは、今回のターゲット群の結果と結びつけられない過去のターゲットが存在した場合、その過去のターゲットの情報を全てクリアする。
従って、マルチパスの影響のある距離にターゲットが入り、ビート周波数におけるピーク検知されない検知サイクルになると、過去のターゲット群の結果を用いるフィルタ効果がリセットされることになる。図14に示す本実施形態の場合、過去1回の検知サイクルのターゲットの結果をメモリ21に記憶している。
【0129】
なお、ターゲット連結処理部32aは、今回の検知サイクルにおけるターゲットと結びつけられなかった過去のターゲットが検出された場合においても、確定されていた過去のターゲットの結果は、予め定められる所定のサイクル数だけ持続されるようにしても良い。
また、記憶される結果が順次更新されることから、過去の結果に基づいて推定する予測結果も順次更新される。ターゲット連結処理部32aは、マルチパスなどの影響で今回の検知サイクルにおいてターゲットが検出されなくても、さらに次の検知サイクル以降において関連付けられた場合、マルチパスなどの影響でピーク検知されないサイクル数以外の過去データをフィルタ処理に使えるようにすることができる。
また、トラッキング制御における外挿法のように、ピーク値が検知さない検知サイクルの回において、上記予測結果を今回の検知サイクルにおける結果として用い、ターゲットの存在状態を継続することも可能である。
【0130】
また、この図に示されるテーブルからAR係数を呼び出す方法では、ターゲット連結処理部32aは、すでに検出されたターゲットに対応する距離ポイント情報に基づいて、推定範囲を選択することが可能となり、処理効率を向上させることができる。すなわち、ターゲット連結処理部32aは、記憶されたAR係数を参照する際に、ターゲットとの相対速度、角度に基づいて範囲を限定することができる。そして、次の回に行われる検知サイクルでは、すでに検出されたターゲットに対応する距離ポイント情報に基づいた推定範囲を選択することが可能となる。これにより、ターゲット連結処理部32aは、処理効率を向上させることができる。そのため、ターゲット連結処理部32aは、限られた範囲の距離ポイントに対応するAR係数を参照することができるので、呼び出す際の精度を高めることができる。
【0131】
図15は、AR係数の記憶方法、呼出方法を示す図である。
この図に示されるAR係数の記憶方法では、ターゲット連結処理部32aは、最終的にターゲットとして確定した距離ポイントに関係付けを行って、AR係数をメモリ21に記憶させる。メモリ21に書き込まれる複素数データは、今回制御サイクルによる情報である。
ターゲット連結処理部32aは、距離ポイント情報をキーにして参照し、メモリ21に記憶されるAR係数を呼び出す。メモリ21から呼び出されるAR係数は、過去制御サイクルによる情報である。
これにより、方位検出部30Aは、距離ポイント情報をキーとして、ターゲットとの関連付けを行うことができる。
【0132】
図16から図20を参照し、処理のフローを説明する。
図16は、本実施形態の主な処理の手順を示すフローチャートである。
次に示す処理の手順における前提条件について、例えば次のように整理する。
1回(サイクル)のデータ取得によって検知される複素数データに含まれるチャンネル数N(データ数)を5chとする。データ拡張によって拡張された複素数データのチャンネル数(拡張チャンネル数)Ne(データ数)を9chとする。データ拡張により増加させた次数(増加次数)Meを5次とする。以上に示したそれぞれの値は、予め定められているものとする。
この図16によって示される処理のフローは、レーダ全体構成でのピーク検知で選出された複数のターゲット別に、制御サイクル(図8参照)毎に繰り返される処理の手順を示し、最初にターゲットが検出された場合の手順については、後述する。
【0133】
ステップSa101において、チャンネル(CH)毎の複素数データが今回の制御サイクル内で1回取得される。この1回の取得により得られる複素数データ(n)のチャンネル数N(データ数)は5chである。この複素数データの取得は、周波数分解処理部22によって行われ、メモリ21に記憶されている受信波によるビート信号を読み込みアンテナ毎のビート信号から周波数変換して算出される。
続いて、ステップSa102において、ターゲット連結処理部32aは、メモリ21に設けられるテーブル(図14)に記憶されている過去(前回)制御サイクルのAR係数(次数Me)1個を呼び出し、データ拡張部310Aに供給する。
【0134】
続いて、ステップSa103において、データ拡張部310Aは、受信波の到来方向を算出する処理を繰り返し行う検知サイクルの今回の検知サイクルにおいて取得された1個(1回分)の複素数データ、及び、ステップSa102においてメモリ21から呼び出されたAR係数(次数Me)から、拡張複素数データを生成する。上記の前提条件に従って、この拡張複素数データに含まれるチャンネル数Ne(データ数)は9chである。このデータ拡張部310によるデータ拡張によりチャンネル数N(5ch)を、チャンネル数Ne(9ch)に拡張させることができる。
【0135】
続いて、ステップSa104において、データ行列・ベクトル作成部321Aは、拡張複素数データに基づいてデータ行列Aとデータベクトルhとを作成する。上記の前提条件に従って、次数Meを5次とする。
ステップSa105において、特異値分解部323は、ステップSa104の処理により作成されたデータ行列Aの特異値分解処理を行い、特異値を算出する。
【0136】
続いて、ステップSa106において、波数推定部324は、ステップSa105の処理により算出された、拡張複素数データに基づいたデータ行列Aの特異値の中から最大の値を示す特異値(最大特異値)を判定する。
波数推定部324は、その判定の結果により、該当ターゲット群では次ステップ以降の波数推定は行わなくするか否かを決定する。波数推定部324は、この最大特異値判定処理により、最大特異値の値が予め設定した閾値よりも小さい場合は、該当ターゲット群に対しては次ステップ以降の波数推定処理を中断させる。
【0137】
ステップSa107において、波数推定部324は、それぞれ算出された特異値を、算出された特異値の最大の値に基づいて正規化する。この特異値の正規化処理では、各特異値を最大特異値で割った値を正規化特異値とする。レーダのように、ターゲットとの距離によって特異値(信号強度)が変動する場合は、特異値の値も変動する。それゆえ、各特異値の値を正規化して相対的に特異値間の大小関係を判定することで判定が容易となる。
ステップSa108において、波数推定部324は、正規化された特異値を予め定められる閾値に基づいて判定し、その判定結果に基づいて後段の処理の波数を選択する。
この波数推定ステップでは、図18にあるように、4個の閾値を判定に用いる。このように複数の閾値を設定することにより、選択された波数を信号波数の推定値とすることができ、波数推定結果を柔軟に調整できる。
【0138】
図17と図18は、図16においてステップSa106からステップSa108までに示された信号波数推定処理の一態様を示す図である。
ステップS106aは、ステップSa106(図16)に対応する最大特異値を判定する処理である。ステップS106aによる予め設定した閾値(σmax_th)よりも最大特異値の値(σa)が大きいか否かを判定することにより、予め設定した閾値(σmax_th)よりも最大特異値の値(σa)が大きくない場合(ステップS106a:No)には、ステップS106bにおいて、得られた情報(複素数データ)の信頼度が低いと判定し、波数推定部324は、該当ターゲットに対しての次ステップの波数推定処理を行わなくする。最大特異値は、入力信号の強度と等価(比例する)であることから、路面マルチパス等の車載用レーダ特有のクラッタ状況による信号を受信するような場合であっても、最大特異値の値を判定することにより、間違った方位推定となることを抑制することができる。
例えば、このステップS106bでは、ステップS106b−1に示すように、波数推定及び方位検出の双方をキャンセルすることができる。また、ステップS106b−2に示すように、波数推定をキャンセルして、任意の波数(例えば、最大波数)を強制的に指定することとしてもよい。この場合、ステップS108i(図18)に進む。
【0139】
波数推定部324は、ステップS106aによる判定により、予め設定した閾値よりも最大特異値の値が大きい場合(ステップS106a:Yes)には、ステップS107aの処理を行う。ステップS107aにおいて、波数推定部324は、ステップS106aに対応する特異値の正規化処理を行い、各特異値σxを最大特異値σaでそれぞれ除算した値(σx/σa)を正規化特異値σyとする。yは自然数を示す。
【0140】
図17において示されるステップS108aからS108iまでの処理は、波数推定部324が行うステップSa108(図15)に対応する波数推定処理である。
ステップS108aでは、ステップSa107(図15)において正規化処理された特異値の中から2番目に大きな特異値(正規化第2特異値σ2)を選択し、正規化第2特異値σ2が予め定められる閾値Th1より小さいか否かを判定する。
ステップS108aによる判定の結果、正規化第2特異値σ2が予め定められる閾値Th1より小さくないと判定した場合(ステップS108a:No)には、ステップS108cに進む。
【0141】
ステップS108bでは、ステップS108aにおける判定の結果、正規化第2特異値σ2が予め定められる閾値Th1より小さいと判定した場合(ステップS108a:Yes)には、推定波数を1に定め、示されない推定波数情報を記憶する記憶領域に記録し、波数推定処理を終える。
【0142】
ステップS108cでは、ステップSa107において正規化処理された特異値の中から3番目に大きな特異値(正規化第3特異値σ3)を選択し、正規化第3特異値σ3が予め定められる閾値Th2より小さいか否かを判定する。判定の結果、正規化第3特異値σ3が予め定められる閾値Th2より小さくないと判定した場合(ステップS108c:No)には、ステップS108eに進む。
【0143】
ステップS108dでは、ステップS108cにおける判定の結果、正規化第3特異値σ3が予め定められる閾値Th2より小さいと判定した場合(ステップS108c:Yes)には、推定波数を2に定め、示されない推定波数情報を記憶する記憶領域に記録し、波数推定処理を終える。
【0144】
ステップS108eでは、ステップSa107において正規化処理された特異値の中から4番目に大きな特異値(正規化第4特異値σ4)を選択し、正規化第4特異値σ4が予め定められる閾値Th3より小さいか否かを判定する。判定の結果、正規化第4特異値σ4が予め定められる閾値Th3より小さくないと判定した場合(ステップS108e:No)には、ステップS108gに進む。
【0145】
ステップS108fでは、ステップS108eにおける判定の結果、正規化第4特異値σ4が予め定められる閾値Th3より小さいと判定した場合(ステップS108e:Yes)には、推定波数を3に定め、示されない推定波数情報を記憶する記憶領域に記録し、波数推定処理を終える。
【0146】
ステップS108gでは、ステップSa107において正規化処理された特異値の中から5番目に大きな特異値(正規化第5特異値σ5)を選択し、正規化第5特異値σ5が予め定められる閾値Th4より小さいか否かを判定する。判定の結果、正規化第5特異値σ5が予め定められる閾値Th4より小さくないと判定した場合(ステップS108g:No)には、ステップS108iに進む。
【0147】
ステップS108hでは、ステップS108gにおける判定の結果、正規化第5特異値σ5が予め定められる閾値Th4より小さいと判定した場合(ステップS108g:Yes)には、推定波数を4に定め、示されない推定波数情報を記憶する記憶領域に記録し、波数推定処理を終える。
【0148】
ステップS108iでは、ステップS108gにおける判定の結果、正規化第5特異値σ5が予め定められる閾値Th4より小さくないと判定した場合(ステップS108g:No)には、推定波数を5に定め、示されない推定波数情報を記憶する記憶領域に記録し、波数推定処理を終える。
【0149】
このようにステップS108aからS108iまでの波数推定処理における判定閾値は、波数1と波数2以上とを分別する閾値Th1、波数2と波数3以上とを分別する閾値Th2、波数3と波数4以上とを分別する閾値Th3、波数4と波数5とを分別する閾値Th4の4個とする。
【0150】
図16に戻り、ステップSa109において、擬似逆行列算出部325は、ステップSa108において波数推定部324によって推定された波数に応じて今回検知サイクルにおける信号部分空間の疑似逆行列を作成する処理を行う。
擬似逆行列算出部325は、ステップSa105において、特異値分解部323が算出した特異値に基づいて、前述の演算式に従って疑似逆行列を作成する。
ステップSa110において、AR係数算出部326は、ステップSa109において算出した擬似逆行列とデータベクトルに基づいてAR係数と入力白色雑音の分散値を算出する。
【0151】
続いて、ステップSa111において、パワースペクトル算出部380は、ステップSa110において算出されたAR係数と入力白色雑音の分散に基づいてパワースペクトルを算出する。
ステップSa112において、パワースペクトル算出部380は、算出されたパワースペクトルに基づいてターゲット数及びターゲットの方向を示す角度を検知する。
ステップSa113において、ターゲット連結処理部32aは、AR係数算出部326によって算出された次数MeのAR係数(n)をメモリ21に記憶させる。
以上に示した手順により、電子走査型レーダ装置は、検出精度を高めた方位検出を行うことができる。
【0152】
上記の図16に示す処理の手順において、データ拡張部310Aが最初にターゲットを検知した検知サイクルにおいて取得するAR係数(n−1)は、予め定められた値を初期値として上記に示す処理の手順を行うことも可能である。
本実施形態においては、データ拡張用のAR係数(AR係数2)を1回目の検知サイクルにおいて生成するFBLP部360Aを備えていることにより、以下に示す手順を図16に示す手順に付加して上記の初期値に代えることができる。これにより、更にターゲットを検知した時点からの検出精度を高めることができる。
以下、FBLP部360Aが生成するAR係数(AR係数2)を、2回目のターゲット検知サイクルに適用し、3回目以降は、MFBLP部320Aが生成するAR係数(AR係数1)を適用する場合の一態様について示す。
【0153】
図19は、AR係数の初期値を定める処理の手順を示すフローチャートである。
まず、ステップSa101において、チャンネル(CH)毎の複素数データが今回の制御サイクル内で1回取得された後に、ステップSa201において、現在の検知サイクルが、最初にターゲットを検出した検知サイクルであるか否かをターゲット連結処理部32aの結果を参照して判定する。ステップSa201における判定の結果、現在の検知サイクルが、最初にターゲットを検出した検知サイクルでないと判定した場合(ステップSa201:No)は、ステップSa205に進む。ステップSa201における判定の結果、現在の検知サイクルが、最初にターゲットを検出した検知サイクルであると判定した場合(ステップSa201:Yes)は、ステップSa202に進む。
【0154】
ステップSa202において、正規方程式作成部361は、最初にターゲットを検出した今回検知サイクルにおいて取得した複素数データに基づいて次数Mの正規方程式を作成する。
ステップSa203において、AR係数算出部363Aは、正規方程式作成部361によって作成された正規方程式から導かれる第2の次数のAR係数(AR係数2)を算出する。このように、AR係数算出部363Aは、今回検知サイクルにおいて検知された受信波によるビート周波数に応じた複素数データに基づいて算出される次数MのAR係数2(n)を得る。
ステップSa204において、AR係数算出部363Aは、導かれたAR係数2(n)を、最初にターゲットを検出した検知サイクルのAR係数としてターゲット連結処理部32aに供給する。ターゲット連結処理部32aは、供給されたAR係数2(n)をメモリー21に記憶させる。メモリー21に記憶させた後、ステップSa112に進む。
【0155】
続いて、ステップSa205において、現在の検知サイクルが、最初にターゲットを検出してから2回目の検知サイクルであるか否かをターゲット連結処理部32aの結果を参照して判定する。ステップSa205における判定の結果、現在の検知サイクルが、最初にターゲットを検出してから2回目の検知サイクルでないと判定した場合(ステップSa205:No)は、ステップSa102に進む。ステップSa205における判定の結果、現在の検知サイクルが、最初にターゲットを検出してから2回目であると判定した場合(ステップSa205:Yes)は、ステップSa206に進む。
【0156】
ステップSa206において、データ拡張部310Aは、メモリー21に記憶されている、最初にターゲットを検出した検知サイクルのAR係数(次数M)をターゲット連結処理部32aを制御して呼び出す。
ステップSa207において、データ拡張部310Aは、今回の検知サイクルにおいて取得された複素数データ、及び、最初にターゲットを検出した検知サイクルのAR係数から、データ数を増加させた拡張複素数データ(次数Me)を生成する。拡張複素数データ(次数Me)を生成した後、ステップSa104に進む。
【0157】
なお、ステップSa102からステップSa113までの処理は、図16と同じである。ただし、ステップSa205において最初にターゲットを検出してから2回目の検知サイクルであると判定された場合は、ステップSa104において、データ行列・ベクトル作成部321Aは、ステップSa207において拡張された拡張複素数データに基づいてデータ行列Aとデータベクトルhとを作成する。
【0158】
本実施形態に示す手順によれば、最初にターゲットを検出してから検知2回(サイクル)目で次数MeのAR係数1(n)が得られる。次数MeのAR係数1(n)が次の検知サイクルにおいて参照されるため、次数Meにデータ拡張した効果は、3回目(サイクル)以降の検知サイクルに表れる。
このように、本実施形態に示す電子走査型レーダ装置は、検出精度を高めた方位検出ができる。
【0159】
(第2実施形態)
図1から図20を参照し、スペクトル推定処理において高分解能アルゴリズムとして知られるARスペクトル推定法を用いる場合の他の態様について、より具体的に示す。
この図1に示した方位検出部30に基づいて、第1実施形態に示した処理手順と異なる処理手順について示す。図1から図19に示す構成と同じ構成には同じ符号を付す。
図20は、AR係数の初期値を定める処理の手順を示すフローチャートである。
まず、ステップSa101において、チャンネル(CH)毎の複素数データが今回の制御サイクル内で1回取得される。
その後、ステップSa201において、現在の検知サイクルが、最初にターゲットを検出した検知サイクルであるか否かをターゲット連結処理部32aの結果を参照して判定する。ステップSa201における判定の結果、現在の検知サイクルが、最初にターゲットを検出した検知サイクルでないと判定した場合(ステップSa201:No)は、ステップSa102に進む。ステップSa201における判定の結果、現在の検知サイクルが、最初にターゲットを検出した検知サイクルであると判定した場合(ステップSa201:Yes)は、ステップSa202に進む。
【0160】
ステップSa202において、正規方程式作成部361は、最初にターゲットを検出した今回検知サイクルにおいて取得した複素数データに基づいて次数Mの正規方程式を作成する。
ステップSa203において、AR係数算出部363Aは、正規方程式作成部361によって作成された正規方程式から導かれる第2の次数のAR係数(AR係数2)を算出する。このように、AR係数算出部363Aは、今回検知サイクルにおいて検知された受信波によるビート周波数に応じた複素数データに基づいて算出される次数MのAR係数2(n)を得る。
ステップSa207において、データ拡張部310Aは、今回の検知サイクルにおいて取得された複素数データ、及び、最初にターゲットを検出した検知サイクルのAR係数から、データ数を増加させた拡張複素数データ(次数Me)を生成する。拡張複素数データ(次数Me)を生成した後、ステップSa104に進む。
なお、ステップSa102からSa113までの処理は、図16と同じである。
ただし、ステップSa201において最初にターゲットを検出した検知サイクルであると判定された場合は、ステップSa104において、データ行列・ベクトル作成部321Aは、ステップSa207において拡張された拡張複素数データに基づいてデータ行列Aとデータベクトルhとを作成する。
このように、本実施形態に示す電子走査型レーダ装置は、検出精度を高めた方位検出ができる。
【0161】
本実施形態に示す手順によれば、最初にターゲットを検出した検知1回目(サイクル)で次数MeのAR係数1(n)が得られる。次数MeのAR係数1(n)は、次の検知サイクルにおいてデータ拡張処理において参照されるため、次数Meにデータ拡張した効果は、2回(サイクル)目以降の検知サイクルに表れる。
なお、本実施形態に示す手順の場合、ターゲットを検知した最初の検知サイクルにおいて、データ拡張を行うためのAR係数2(n)を算出する演算と、スペクトル推定処理におけるAR係数1(n)を算出する演算とを、1回の検知サイクル内に処理する必要がある。
このように、本実施形態に示す電子走査型レーダ装置は、検出精度を高めた方位検出ができる。
【0162】
(第3実施形態)
図1から図25を参照し、スペクトル推定処理において高分解能アルゴリズムとして知られるARスペクトル推定法を用いる場合の他の態様について、より具体的に示す。
図21は、本実施形態の方位検出部の構成を示すブロック図である。
この図21に示される方位検出部30Bは、図1に示した方位検出部30の一態様である。図1、図7に示す構成と同じ構成には同じ符号を付す。
図21に示される方位検出部30Bとターゲット連結処理部32bのそれぞれは、信号処理部20A(図1)における方位検出部30とターゲット連結処理部32である。
【0163】
ターゲット連結処理部32bは、今回検知サイクルにおいて算出されたAR係数1(n)をメモリ21に書き込んで記憶させる。AR係数1(n)は、今回検知サイクルで拡張された複素数データ(拡張複素数データ)から、MFBLP部320Bによって算出される。
ターゲット連結処理部32bにより、メモリ21に書き込まれたAR係数1が、次の検知サイクル(n回目)である今回検知サイクルにおいて呼び出された場合、そのAR係数1は、過去(前回)のAR係数1(n−1)として呼び出される。
また、ターゲット連結処理部32bは、今回検知サイクルにおいて、今回検知サイクルで検出されたデータ拡張前の複素数データから、FBLP部360Bによって算出されたAR係数2(n)をメモリ21に書き込んで記憶させる。
ターゲット連結処理部32bにより、メモリ21に書き込まれたAR係数2が、次の検知サイクル(n回目)である今回検知サイクルにおいて呼び出された場合、そのAR係数2は、過去(前回)のAR係数2(n−1)として呼び出される。
【0164】
つまり、本実施形態は、第1実施形態に対して、メモリ21に記憶させるAR係数の数が異なる。メモリ21に記憶させる情報は、過去の制御サイクル数回分のMFBLP部320Bによって算出されたAR係数(AR係数1(n))と、FBLP部360Bによって算出されたAR係数(AR係数2(n))とである。
ターゲット連結処理部32bは、メモリ21に記憶されている過去の検知サイクルにおいてターゲットを結びつけた後、ターゲット毎に過去検知サイクル(図8)において記録されたAR係数1(n−1)、AR係数1(n−2)、AR係数2(n−1)、AR係数2(n−2)を方位検出部30Bへ出力する。
また、ターゲット連結処理部32bは、今回検知サイクル(図8)において取得された複素数データに基づいて算出されたAR係数1(n)及びAR係数2(n)に対して、ターゲット確定部31から出力される距離、相対速度及び方位の識別情報を付して、メモリ21に記録する。
【0165】
また、方位検出部30Bは、データ拡張部310B、MFBLP部320B、FBLP部360B、係数フィルタ部370、及び、パワースペクトル算出部380Bを備える。
データ拡張部310Bは、受信波の到来方向を算出する処理を繰り返し行う検知サイクルにおける今回の検知サイクルにおいて取得された複素数データ(n)、及び、今回の検知サイクルにおいて算出されるAR係数(AR係数2(n))と、過去の検知サイクルにおいて算出されたAR係数(AR係数2(n−1)、AR係数2(n−2))から算出される平均化AR係数2(n)から、データ数を増加させた拡張複素数データ(n)を生成する。
なお、今回の検知サイクルにおいて取得された複素数データ(n)は、周波数分解処理部22が周波数分解したビート周波数(上昇と下降のいずれか又は両方)に応じた複素数データである。
また、データ拡張部310Bにおける平均化AR係数2(n)は、後述の係数フィルタ部370によって、今回及び過去の制御サイクルにおいてそれぞれ算出されたものを平均化処理したものである。例えば、平均化AR係数2(n)は、係数フィルタ部370によって、今回の検知サイクルにおいて算出されたAR係数2(n)と、過去の検知サイクルにおいて算出されたAR係数2(n−1)とAR係数2(n−2)とを平均化処理した結果から導かれる。
なお、最初にターゲットを検知した制御サイクルにおいては、データ拡張部310Bにおける平均化AR係数2(n)は、後述のFBLP部360Bによって、最初にターゲットを検知した制御サイクルにおいて算出されたAR係数2(n)である。
【0166】
データ拡張部310Bは、受信波の到来方向を算出する処理を繰り返し行う検知サイクルにおける今回の検知サイクルにおいて取得された複素数データ、及び、今回の検知サイクルにおいて算出されたAR係数2(n)と、過去の検知サイクルにおいて算出されたAR係数2(n-1)と、AR係数2(n-2)とを平均化した平均化AR係数2から、データ数を増加させた拡張複素数データ(n)を生成する。
データ拡張部310Bは、データ数を拡張する元の複素数データ(n)に基づいて設定可能な第2の次数(M)より拡張させる。
【0167】
MFBLP部320B(第1演算処理部)は、拡張複素数データ(n)から作成したデータ行列とデータベクトルに基づいて、第1の次数(Me)のAR係数(AR係数1(n))と白色雑音の分散値とを算出する。
このようなMFBLP部320Bは、データ行列・ベクトル作成部321A、特異値分解部323、波数推定部324、擬似逆行列算出部325、及び、AR係数算出部326Bを備える。
AR係数算出部326Bは、擬似逆行列算出部325によって作成された信号部分空間の疑似逆行列と、データ行列・ベクトル作成部321Aによって導かれたデータ行列とから、AR係数と、入力白色雑音の分散σ2を算出する。このように、AR係数算出部326Bは、検知サイクルに応じて、ターゲットの存在が検知されたビート周波数である検出ビート周波数の複素数データに基づいたAR係数と、入力白色雑音の分散σ2を導くことができる。また、AR係数算出部326Bは、算出したAR係数1(n)と、入力白色雑音の分散σ2とを係数フィルタ部370に供給する。
また、AR係数算出部326Bは、算出したAR係数1(n)をターゲット連結処理部32bに供給し、メモリ21に書き込ませる。
【0168】
FBLP部360B(第2演算処理部)は、複素数データ(n)から作成した正規方程式に基づいて、第2の次数のAR係数(AR係数2(n))を算出する。
このようなFBLP部360Bは、正規方程式作成部361及びAR係数算出部363Bを備える。
【0169】
AR係数算出部363Bは、正規方程式作成部361によって作成された「今回検知サイクル」における第2の次数の正規方程式から導かれる第2の次数のAR係数(AR係数2(n))を算出する。このように、AR係数算出部363Bは、今回検知サイクルにおいて検知された受信波によるビート周波数に応じた複素数データに基づいて算出されるAR係数を得、後段のデータ拡張のための係数とする。
また、AR係数算出部363Bは、ターゲット連結処理部32bとAR係数フィルタ部372へ、導かれたAR係数(AR係数2(n))を出力する。
【0170】
係数フィルタ部370は、AR係数フィルタ部371とAR係数フィルタ部372を備える。
AR係数フィルタ部371は、AR係数算出部326Bによって、今回の制御サイクルにおいて算出されたAR係数1(n)と、ターゲット連結処理部32bによってメモリ21から呼び出された過去の制御サイクルにおいて算出されたAR係数1(n−1)とAR係数1(n−2)と、の平均化処理をして平均化AR係数1(n)を算出する。
AR係数フィルタ部371は、平均化処理をした平均化AR係数1(n)と、入力白色雑音の分散σ2をパワースペクトル算出部380Bへ出力する。
AR係数フィルタ部372は、AR係数算出部363Bによって、今回の制御サイクルにおいて算出されたAR係数2(n)と、ターゲット連結処理部32bによってメモリ21から呼び出された過去の制御サイクルにおいて算出されたAR係数2(n−1)とAR係数2(n−2)と、の平均化処理をして平均化AR係数2(n)を算出する。
AR係数フィルタ部372は、平均化処理をした平均化AR係数2(n)をターゲット連結処理部32bによってメモリ21に記憶させる。
パワースペクトル算出部380Bは、その平均化AR係数1(n)と入力白色雑音の分散σ2に基づいて導かれるパワースペクトルから受信波の到来方向を算出する。
なお、AR係数フィルタ部371は、導かれたAR係数1(n)をターゲット連結処理部32bに出力し、ターゲット連結処理部32bによってメモリ21に記憶させる。
【0171】
図22は、MFBLP法におけるAR係数の平均化処理を示す図である。
この図22において、次数を5次とした場合について説明する。
前述の式(22)と式(23)において示したように、AR係数は、信号部分空間の擬似逆行列から算出される。
算出されるAR係数ベクトルは、[a5(1) a5(2) a5(3)a5(4) a5(5)]Tとして示すことができる。添え字のTは、転置行列を示す。
今回制御サイクルにおいて算出されたAR係数1(今回AR係数1)をa1(t)として示す。また、過去の制御サイクルにおいて算出されたAR係数1(過去AR係数1)をa1(t−1)からa1(t−n)として示す。
「今回AR係数1:a1(t)」と「過去AR係数1:a1(t−1)からa1(t−n)」の各要素同士を平均(加算)する平均化処理によって平均AR係数1:Ave_a1(t)を算出する演算式を式(26)として示す。
【0172】
【数26】
【0173】
式(26)においてk1からkn+1は、重み係数である。
なお、本実施形態では、波数推定結果により、擬似逆行列を算出する過程においてランクを可変しているのみなので、AR係数ベクトルの次数、すなわちAR係数ベクトルの要素の数は一定の値になる。これにより、AR係数ベクトルの平均化処理が可能となる。
【0174】
図23は、FBLP法におけるAR係数の平均化処理を示す図である。
この図23に示される正規方程式は、上記の式(1)をAR係数について整理したものである。この正規方程式は、次数を3とした場合を式(27)として示す。
【0175】
【数27】
【0176】
式(27)に従って算出されたAR係数ベクトルは、[a3(1) a3(2) a3(3)]Tとして示すことができる。添え字のTは、転置行列を示す。今回制御サイクルにおいて算出されたAR係数2(今回AR係数2)をa2(t)として示す。また、過去の制御サイクルにおいて算出されたAR係数2(過去AR係数2)をa2(t−1)からa2(t−n)として示す。
「今回AR係数2:a2(t)」と「過去AR係数2:a2(t−1)からa2(t−n)」の各要素同士を平均(加算)する平均化処理によって平均AR係数2:Ave_a2(t)を算出する演算式を式(28)として示す。
【0177】
【数28】
【0178】
式(28)においてk1からkn+1は、重み係数である。
なお、本実施形態では、正規方程式の次数を固定していることから、AR係数ベクトルの要素の数が一定の値になる。これにより、AR係数ベクトルの平均化処理が可能となる。
【0179】
図24は、メモリ21に設けられるテーブルを示す図である。
この図24に示されるテーブルでは、前述の図14に示されるテーブルに対して、AR係数の項目が異なる。
追加となるAR係数の項目は、上昇方向のピーク周波数時のAR係数AR2_C_up、下降方向のピーク周波数時のAR係数AR2_C_dwnがあり、ピーク周波数ポイントに対応するAR係数2を格納する。
このピーク周波数時のAR係数は、メモリ21に、図24のテーブル形式により格納されている(正確には、上記の項目の記憶領域は他より大きくなるが、表を例示するうえで便宜上同じとしている)。メモリ21は、格納される上昇方向のピーク周波数時のAR係数AR1_C_upとAR2_C_up、下降方向のピーク周波数時のAR係数AR1_C_dwnとAR2_C_dwnを記憶する。
【0180】
図25を参照し、処理のフローを説明する。
図25は、本実施形態の処理を示すフローチャートである。
本実施形態に示す手順は、図22、図23に示したAR係数の平均化処理を、2回目以降のターゲット検知サイクルに適用する場合の一態様を示す。
第1実施形態における図16との相違点を中心に説明する。図16と同じ処理を行うステップには同じ符号を附す。
次に示す処理の手順における前提条件について、例えば次のように整理する。
1回のデータ取得によって検知される複素数データに含まれるチャンネル数N(データ数)を5chとする。データ拡張前の正規方程式の次数Mを3次とする。データ拡張によって拡張された複素数データのチャンネル数(拡張チャンネル数)Ne(データ数)を9chとする。データ拡張後の正規方程式の次数(増加次数)Meを5次とする。以上に示したそれぞれの値は、予め定められているものとする。
この図25によって示される処理のフローは、レーダ全体構成でのピーク検知で選出された複数のターゲット別に、制御サイクル(図8参照)毎に繰り返される。
【0181】
ステップSa101において、チャンネル(CH)毎の複素数データが今回の制御サイクル内で1回取得される。
続いて、ステップSa301において、正規方程式作成部361は、抽出した今回検知サイクルにおいて取得した複素数データに基づいて、ARモデルに適用する次数Mの正規方程式を作成する。
ステップSa302において、AR係数算出部363Bは、ステップSa301において作成された正規方程式から、次数Mの第2のAR係数(AR係数2)を算出する。
【0182】
続いて、ステップSa303において、AR係数フィルタ部372は、メモリ21に記憶されている、過去(前回、前々回)の検知サイクルにおいて導かれたAR係数(AR係数2(n−1)、AR係数2(n−2))をターゲット連結処理部32bを介して呼び出す。
ステップSa304において、AR係数フィルタ部372は、AR係数算出部363Bによって今回の検知サイクルにおいて算出された次数MのAR係数(今回AR係数2(n))と、ターゲット連結処理部32bから供給される過去(前回、前々回)の検知サイクルにおいて算出されたAR係数(AR係数2(n−1)、AR係数2(n−2))との平均化処理をして、平均化AR係数2(n)を算出する。
なお、ステップSa304に続くステップSa103からSa110までの処理は、前述の図16と同じである。
【0183】
続いて、ステップSa305において、AR係数フィルタ部371は、メモリ21に記憶されている、過去(前回、前々回)の検知サイクルにおいて導かれたAR係数(AR係数1(n−1)、AR係数1(n−2))をターゲット連結処理部32bを介して呼び出す。
ステップSa306において、AR係数フィルタ部371は、AR係数算出部326Bによって今回の検知サイクルにおいて導かれた次数MeのAR係数1と、ターゲット連結処理部32bから供給される過去(前回、前々回)の検知サイクルにおいて導かれたAR係数1(AR係数1(n−1)、AR係数1(n−2))との平均化処理をして、平均化AR係数1(n)を算出する。
なお、ステップSa306に続くステップSa111からSa113までの処理は、前述の図16と同じである。
ステップSa307において、AR係数フィルタ部372は、算出した平均化AR係数2(n)をターゲット連結処理部32bによってメモリ21に記憶させる。
【0184】
本実施形態に示す手順によれば、次数Meにデータ拡張した効果は、検知2回(サイクル)目以降に表れる。初回(1回目)の検知サイクルのみ、次数3次と5次のデータ拡張の演算をそれぞれ行うことにより、本実施形態に示す電子走査型レーダ装置は、検出精度を高めた方位検出ができる。
【0185】
(第4実施形態)
図1から図27を参照し、スペクトル推定処理において高分解能アルゴリズムとして知られるARスペクトル推定法を用いる場合の他の態様について、より具体的に示す。
図26は、本実施形態の方位検出部の構成を示すブロック図である。
この図26に示される方位検出部30Cは、図1に示した方位検出部30の一態様である。図1、図7、図19に示す構成と同じ構成には同じ符号を付す。
図26に示される方位検出部30Cとターゲット連結処理部32cのそれぞれは、信号処理部20A(図1)における方位検出部30とターゲット連結処理部32である。
【0186】
ターゲット連結処理部32cは、今回検知サイクルにおいて算出されたAR係数1(n)をメモリ21に書き込んで記憶させる。AR係数1(n)は、今回検知サイクルで拡張された複素数データ(拡張複素数データ)から、MFBLP部320Cによって導かれる。
ターゲット連結処理部32cにより、メモリ21に書き込まれたAR係数1が、次の検知サイクル(n回目)である今回検知サイクルにおいて呼び出された場合、そのAR係数1は、過去(前回、前前回)のAR係数1(n−1)、AR係数1(n−2)として呼び出される。
つまり、本実施形態は、第1実施形態に対して、メモリ21に記憶させる情報は、次数を増加させたAR係数のみである。そのAR係数(AR係数1)は、MFBLP部320Cによって算出される。
ターゲット連結処理部32cは、メモリ21に記憶されている過去の検知サイクルにおけるターゲットを結びつけた後、ターゲット毎に過去検知サイクル(図8)において記録されたAR係数1(n−1)、AR係数1(n−2)を方位検出部30Cへ出力する。
また、ターゲット連結処理部32cは、今回検知サイクル(図8)において取得された複数の複素数データに基づいて算出されたAR係数1(n)に対して、ターゲット確定部31から出力される距離、相対速度及び方位の識別情報を付して、メモリ21に記録する。
つまり、本実施形態は、第1から3実施形態に対して、データ拡張のためのAR係数の生成及びデータ拡張を行わずにスペクトル推定処理を行う点が異なる。
【0187】
方位検出部30Cは、MFBLP部320C、ARフィルタ部371、及び、パワースペクトル算出部380Bを備える。
【0188】
MFBLP部320C(第1演算処理部)は、今回の制御サイクルにおいて検出された複素数データ(n)から作成したデータ行列とベクトルに基づいて、第1のAR係数(AR係数)と白色雑音の分散値とを算出する。
MFBLP部320Cは、データ行列・ベクトル作成部321C、特異値分解部323、波数推定部324、擬似逆行列算出部325、及び、AR係数算出部326Bを備える。
【0189】
データ行列・ベクトル作成部321Cは、「今回検知サイクル」において検出された複素数データ(n)からデータ行列Aとベクトルhを作成する。
【0190】
このように、方位検出部30Cは、自己回帰モデルを用いるスペクトル推定法により、信号部分空間成分の擬似逆行列に基づいて受信波の到来方向を算出する。
なお、本実施形態において、データ行列・ベクトル作成部321、特異値分解部323、擬似逆行列算出部325及びAR係数算出部326が第2手段として機能する。波数推定部324が第3手段として機能する。AR係数フィルタ部371が第5手段として機能する。
【0191】
図27は、本実施形態の処理を示すフローチャートである。
図16、図25と同じ処理を行うステップには同じ符号を附す。
ステップSa104’において、データ行列・ベクトル作成部321Cは、「今回検知サイクル」において検出された複素数データ(n)から導かれるデータ行列Aとベクトルhを作成する。
ステップSa114において、AR係数フィルタ部371は、平均化したAR係数を今回AR係数として、メモリ21に記憶する。
このように、本実施形態においては、第1から第3実施形態に示したデータ拡張を行わない。データ拡張を行わないままMFBLP法を適用することが可能であり、MFBLP部320Cは、所望の次数のAR係数1(n)を算出することができる。
また、記憶するAR係数は、平均化した後のAR係数にすることもでき、AR係数フィルタの効果を増すことができる(図26の点線部参照)。
このように、本実施形態に示す電子走査型レーダ装置は、検出精度を高めた方位検出ができる。
【0192】
(第5実施形態)
次に、図28、図29を参照し、本実施形態による電子走査型レーダ装置について説明する。
図28は、本実施形態による電子走査型レーダ装置の構成例を示すブロック図である。
本実施形態においては、第1から第4実施形態と同様に、方位推定を高分解能アルゴリズムで行う。図1に示す第1から第4実施形態と同じ構成については、同一の符号を付し、以下第1実施形態との相違点について説明する。
信号処理部20Bにおいて周波数分解処理部22Bは、アンテナ毎の上昇領域と下降領域とのビート信号を複素数データに変換し、そのビート周波数を示す周波数ポイントと、複素数データとをピーク検知部23Bへ出力する。
そして、ピーク検知部23Bは、上昇領域及び下降領域それぞれのピーク値と、そのピーク値の存在する周波数ポイントとを検出し、その周波数ポイントを周波数分解処理部22Bへ出力される。
次に、周波数分解処理部22Bは、上昇領域及び下降領域それぞれについて該当する複素数データを、方位検出部30へ出力する。
【0193】
この複素数データが、上昇領域及び下降領域のそれぞれのターゲット群(上昇領域及び下降領域においてピークを有するビート周波数)となる。ここで、ピーク検知部23Bは、方位検出部の波数推定処理における最大特異値判定(ステップS106a)と同じ機能として動作させることができるので、削除することも可能となる。
ターゲット連結処理部32Bにおいて、過去に確定したターゲットと上りと下りの両方のターゲット群とを結びつける必要があるため、メモリ21には前述のテーブルが記憶されている。
ターゲット連結処理部32Bは、図1のターゲット連結処理部32と同様な処理により、今回の検知サイクルと、過去の検知サイクルとの連結処理を行う。
【0194】
そして、方位検出部30は、上昇領域及び下降領域それぞれにおいて、第1から第4実施形態に示したように、MFBLP法によるデータ行列を特異値分解を行い、また、波数推定を行うことにより、AR係数を算出する。
次に、方位検出部30は、上昇領域のAR係数及び下降領域のAR係数の各々について角度θを検出し、図29に示すテーブルとしてピーク組合せ部24Bへ出力する。
そして、ピーク組合わせ部24Bは、図29に示すテーブルの情報を元に、同様の角度を有する組み合わせを行い、上昇領域と下降領域とのビート周波数を組み合わせを距離検出部25及び速度検出部26へ出力する。
【0195】
距離検出部25は、第1実施形態と同様に、組み合わせの上昇領域と下降領域とのビート周波数により距離を算出する。
また、速度検出部26は、第1実施形態と同様に、組み合わせの上昇領域と下降領域とのビート周波数により相対速度を算出する。
ターゲット確定部31Bは、上述した上昇領域及び下降領域の複素数データ、上昇領域及び下降領域における周波数ポイントと距離と相対速度と方位とを、現在の状態として確定する。
そして、ターゲット連結処理部32Bは、ターゲット確定部31Bから入力される、ターゲット毎に、上昇領域及び下降領域それぞれの周波数ポイントと、上昇領域及び下降領域それぞれのAR係数と、距離と、縦位置と、横位置と、相対速度とを、第1から第4実施形態と同様の処理により前述のテーブルに記憶させる。
以上に示した手順により、電子走査型レーダ装置は、検出精度を高めた方位検出を行うことができる。
【0196】
(第6実施形態)
次に、図30、図31を参照し、本実施形態による電子走査型レーダ装置について説明する。
図30は、本実施形態による電子走査型レーダ装置の構成例を示すブロック図である。
本実施形態においては、第1実施形態と異なり、先にARスペクトル推定処理等の高分解能アルゴリズムより分解能が低いDBF(Digital Beam Forming)を用いて方位推定を行い、その後にMFBLP法を用いたARスペクトル推定処理による高分解能アルゴリズムで方位推定を行う構成である。図1に示す第1実施形態、図28に示す第5実施形態と同じ構成については、同一の符号を付し、以下第1実施形態、第5実施形態との相違点について説明する。
この図に示されるように、図1の第1実施形態における周波数分解処理部22とピーク検出部23との間にDBF処理部40が設けられ、上述したように、先にDBFを用いて受信波の到来する方位を検出する点が第1実施形態と異なる。
【0197】
第5実施形態と同様に、周波数分解処理部22は、入力されるビート信号を周波数分解(時間軸フーリエ変換)し、ビート周波数を示す周波数ポイントと、複素数データとを、DBF処理部40へ出力する。
次に、DBF処理部40は、入力される各アンテナに対応した複素数データを、アンテナの配列方向にフーリエ変換し、すなわち空間軸フーリエ変換を行う。
そして、DBF処理部40は、角度に依存、すなわち角度分解能に対応した角度チャンネル毎の空間複素数データを計算し、ビート周波数毎にピーク検知部23に対して出力する。
【0198】
これにより、DBF処理部40から出力される角度チャンネル毎の空間複素数データ(ビート周波数単位)の示すスペクトルは、ビーム走査分解能による受信波の到来方向推定に依存したものとなる。
また、アンテナの配列方向にフーリエ変換されているため、角度チャンネル間にて複素数データを加算しているのと同じ効果を得ることができ、角度チャンネル毎の複素数データはS/N比が改善されており、ピーク値の検出における精度を、第1実施形態と同様に向上させることが可能となる。
上述した複素数データ及び空間複素数データともに、第1実施形態と同様に、三角波の上昇領域及び下降領域の双方にて算出される。
【0199】
次に、ピーク検知部23は、DBF処理部40による処理の後に、DBF結果による角度チャンネル毎にピークの検出を行い、検出された各チャンネルのピーク値を、次のピーク組合せ部24へ角度チャンネル毎に出力する。すなわち、16の分解能による空間軸フーリエ変換の場合、角度チャンネルの数は15となる。
ピーク組合せ部24では、第1実施形態と同様に、上昇領域及び下降領域におけるピーク値のあるビート周波数とそのピーク値を組み合わせて、距離検出部25及び速度検出部26へ、角度チャンネル毎に出力する。
【0200】
そして、ペア確定部27は、距離検出部25及び速度検出部26各々から、順次入力される上記距離r及び相対速度vにより、図5のテーブルを角度チャンネル毎に生成し、第1実施形態と同様に、ターゲット毎に対応した上昇領域及び下降領域それぞれの適切なピークの組み合わせを、角度チャンネル毎に判定する。ここで、DBFでの分解能では、ターゲットが複数の角度チャンネルに跨って存在を示すので、近隣の角度チャンネル(マトリクス)との一致性も加味して、角度チャンネル毎に上昇領域及び下降領域それぞれのピークの適切な組み合わせを行うことができる。そして、上昇領域及び下降領域それぞれのピークのペアを確定し、確定した距離r及び相対速度vを示すターゲット群番号をターゲット確定部31へ出力し、図31に示すテーブルが作成される。
図31は、上昇領域及び下降領域それぞれのピークのペアを確定した結果を記憶するテーブルである。
ペア確定部27は、距離r及び相対速度vのみでなく、それぞれのターゲットの角度チャンネルの情報が得られるため、縦位置と横位置を求めることができるため、図6のテーブルに対して縦位置と横位置が含まれた、今回の検知サイクルの各ターゲット群に対応する結果を有する図31に示すテーブルを生成する。
【0201】
そして、ターゲット連結処理部32Cは、図31のテーブルの情報を用いて、今回の検知サイクルにおけるターゲットと、図8の過去の検知サイクルにおけるターゲットとの結びつけの処理を行うこととなり、結びつけのパラメータとして、距離と相対速度及びピーク周波数ポイントとに加えて、縦位置と横位置を用いることとなるため、結びつけの処理をより高い精度にて行うことが可能となる。
方位検出部30は、第1から第4実施形態に示したように波数推定を行う。
さらに、方位検出部30からの方位情報とDBFからの方位情報とに基づいてAND論理で推定することにより、方向検知の信頼度を向上させたり、互いの方位情報を分担、例えば、近距離では角度分解能が粗くて良いのでDBFの角度情報を用いたりできる効果を成す。
【0202】
このように、方位検出部30は、第1から第6実施形態に示したMFBLP法によるスペクトル推定処理を行うことができる。
【0203】
(本実施形態における方向推定特性)
続いて、本実施形態による電子走査型レーダ装置の方向推定特性について示す。
図32と図33は、本実施形態による電子走査型レーダ装置の方位推定特性の効果を示す図である。
先行する車両が2台の場合について、MFBLP法をそのまま適用した場合と、本実施形態によるデータ拡張とAR係数の平均化処理を行ったMFBLP法を適用した場合とを比較する。この比較において、ターゲット(先行車両)までの距離を同じに設定した複素数データに基づいて、実施形態の違いによる推定結果の差を比較する。ターゲット(55m離れた先行車両)が2台であり、その結果、到来波における波数を2と推定した場合を示す。
図32(a)に示すMFBLP法のみにおける推定結果は、チャンネル数を5CH、次数を3、波数を2としてスペクトル推定した結果である。
図に示される3つの曲線は、3サイクル分の結果を示している。この図に示されるように、MFBLP法のみにおいては、パワースペクトルを示す波形のピークの位置(角度)がばらつき、安定にターゲットの位置(角度)を検出することができない。つまり、単にMFBLP法をそのまま適用しても安定した結果を得ることができないことが分かる。
【0204】
一方、本実施形態によるデータ拡張を行ったMFBLP法を用いた場合を図32(b)と図33(c)に示す。また、データ拡張を行わず、算出したAR係数のフィルタ処理(平均化処理)をしたMFBLP法を用いた場合を図33(d)に示す。
図32(b)に示すデータ拡張を行ったMFBLP法における推定結果は、第1実施形態に基づいて、チャンネル数を9CH、次数を5、波数を2としてスペクトル推定した結果である。
図33(c)に示すデータ拡張を行ったMFBLP法における推定結果は、第3実施形態に基づいて、チャンネル数を9CH、次数を5、波数を2としてスペクトル推定した結果である。
図33(d)に示すAR係数の平均化処理をしたMFBLP法における推定結果は、第4実施形態に基づいて、チャンネル数を5CH、次数を3、波数を2としてスペクトル推定した結果である。
なお、図32(a)、(b)、図33(c)、(d)のいずれの場合も、同じ複素数データにもとづいて処理を行っている。
【0205】
このように、図32(b)と図33(c)、(d)に示される結果には、それぞれの曲線が示すピークが急峻であり、且つ、ピークが検出される方向が安定していることが示されている。その結果、ピーク値が2つ分離して検出できており、ターゲットの車両が2台存在することが良好に検出されている。
また、本実施形態に示したように、データ取得回数が1制御サイクルに1回の複素数データに基づいた場合であっても、図32(b)と図33(c)、(d)に示される推定結果から良好な推定結果を得ることができる。
【0206】
本実施形態による電子走査型レーダ装置は、検出ビート周波数の複素数データに基づいて、方位検出部30において、スペクトル推定を行う方程式の次数と、推定される実際の波数とを設定して方位推定を行うことにより、検出精度を向上させることができる。
【0207】
本発明に係る実施形態によれば、データ拡張と次数の増加を施したMFBLP法の処理が、相関行列等の入力データとデータの取得回数に伴う、記憶容量と演算負荷を増大することなく、ARスペクトル推定の特性を有効に活用した方位検出精度向上となる効果を奏する。
第1手段により、元の複素数データよりも長いデータ(CH)数に拡張できるので、第2手段のデータ行列とベクトルの要素数や次数を増やせる効果を奏する。
第2手段により、データ行列とベクトルから特異値分解することにより疑似逆行列を求めるので、相関行列(又は共分散行列)を求めることなく、計算精度の良いAR係数を求めることができる。また、信号部分空間のAR係数を求めることができるので、偽ピークを抑制した精度の良い方位検出ができる。また、元の複素数データから設定できる最大次数よりさらに次数を増加させることにより、より高次の方が推定精度が良くなるというARスペクトル推定の特性が反映できる効果を奏する。
第3手段により、比較的容易で、前ステップの特異値分解処理を有効に活用した方法で信号波数を推定できるという効果を奏する。最大特異値の大きさを判定することで、間違った方位推定をすることを防止できるので、レーダ全体構成でのピーク検知なし(例えば、全距離ポイント又は任意の距離ポイント範囲の角度をスペクトル推定する場合)や、ピーク検知後でも異なる閾値で波数推定を実行すべきかどうかの判断ができる効果を奏する。
また、正規化した特異値で波数を推定することで、ターゲットの距離に依存しない波数推定判定ができる効果を奏する。さらに、複数の特異値を判定する閾値を設けることにより、特有の波数推定基準を設けることができる効果を奏する。
【0208】
第4手段により、データの取得回数とそれに伴う記憶容量と演算負荷を軽減できる効果を奏する。また、記憶する情報として、相関行列よりもメモリ容量が少ない、AR係数とすることができる。
第5手段により、過去制御サイクルのAR係数と平均できるので、データ拡張するためのAR係数の精度を高めたり、方位検出の精度を向上させたりできる効果を奏する。
第6手段により(第3実施形態)、データ拡張するためのAR係数として、かならず今回制御サイクルで取得したAR係数に基づいて方位検出処理を行うことができる効果を奏する。
第1から第4手段の組合せ(第1実施形態)により、次数を増加したAR係数を用いてデータ拡張ができるので、高い検出精度の向上効果を奏する。
第2から第5手段の組合せ(第4実施形態)により、データ拡張しない場合でも、AR係数の平均化によりスペクトルのバラツキを低減することができる効果を奏する。
【0209】
以上、第1〜第4実施形態は、図1に示すFMCW方式のレーダに用いる構成例を基に説明したが、FMCW方式の他のアンテナ構成にも適用することが可能である。また、データ取得からの演算を、本実施形態のマイクロコンピュータでの演算で行う他、他のデバイスやプロセッサ(FPGA,DSP,マイクロコンピュータ)等で計算させることも可能となる。
また、多周波CW、パルスレーダ等のFMCW方式以外の他の方式においても、本発明に適用することが可能である。
本実施形態において、パワースペクトルのピークを算出してターゲット数と方位を求める形態としたが、入力白色雑音の分散値を乗算しないで作成したスペクトルで推定することも可能であるので、入力白色雑音の分散値の計算を省略することもできる。さらに、パワースペクトルの代わりに高次方程式の根を求める計算を用いて、その極で方位を推定してもよい。
【0210】
本実施形態に示したMFBLP法は、特異値分解を行い、信号部分空間の疑似逆行列を求め、AR係数を求める手法なので、標準的なARスペクトル推定法よりも演算負荷は重くなる。しかし、検出する信号数に対してARモデルの次数を高めに設定しても、疑ピークを抑えたパワースペクトルが算出できるので、検出精度が高い推定結果を得ることができる。実際、ARモデルの次数を、設定可能な大きめの次数で固定することができ、MUSIC法のように信号部分空間とノイズ部分空間を選択してスペクトルを求めることができる。
特異値分解は、固有値分解の拡張方式で、特異行列(=非正則行列)や長方行列においても算出できる。特異値は、固有値の正の平方根であるので、特異値と固有値は等価な値である。
しかしながら、前述の参考文献においても、上記MFBLP法に好適な受信波数の推定法については記述されておらず、ましてや車載用レーダのような少ないチャンネル数(CH)に適用された報告もない。一般的な受信波数の推定手法として、FPE(Final Prediction Error)、AIC(Akaike Information Criterion)、MDL(Minimum Description Length)等は知られているが、いずれも演算量が多くなる上に、いずれも検出精度を確保した推定については保証されていない。
本実施形態に示したように、車載用レーダにおける方位検出にARスペクトル推定法を適用し、演算負荷が重くなる上記のFPE,AIC,MDL等の波数(又はモデル次数)推定手法を用いることなく、特異値分解による受信波数推定手法を適用する。特異値分解による受信波数推定手法を適用することにより、受信波数推定を比較的容易に実行でき、且つ上記MFBLP手法に直結できるという利点を得ることができる。
そして、上記受信波数推定結果を、計算した特異値分解による疑似逆行列に適用し、ノイズ部分空間を削除して、信号部分空間のみを抽出した検出精度の高い方位検出を行うことができる。
【0211】
なお、図1、図7、図21、図28、図30における信号処理部20Aから20Cの機能を実現するためのプログラムをコンピュータ読み取り可能な記録媒体に記録して、この記録媒体に記録されたプログラムをコンピュータシステムに読み込ませ、実行することにより、受信波から方位検出を行う信号処理を行ってもよい。なお、ここでいう「コンピュータシステム」とは、OSや周辺機器等のハードウェアを含むものとする。また、「コンピュータシステム」は、ホームページ提供環境(あるいは表示環境)を備えたWWWシステムも含むものとする。また、「コンピュータ読み取り可能な記録媒体」とは、フレキシブルディスク、光磁気ディスク、ROM、CD−ROM等の可搬媒体、コンピュータシステムに内蔵されるハードディスク等の記憶装置のことをいう。さらに「コンピュータ読み取り可能な記録媒体」とは、インターネット等のネットワークや電話回線等の通信回線を介してプログラムが送信された場合のサーバやクライアントとなるコンピュータシステム内部の揮発性メモリ(RAM)のように、一定時間プログラムを保持しているものも含むものとする。
【0212】
また、上記プログラムは、このプログラムを記憶装置等に格納したコンピュータシステムから、伝送媒体を介して、あるいは、伝送媒体中の伝送波により他のコンピュータシステムに伝送されてもよい。ここで、プログラムを伝送する「伝送媒体」は、インターネット等のネットワーク(通信網)や電話回線等の通信回線(通信線)のように情報を伝送する機能を有する媒体のことをいう。また、上記プログラムは、前述した機能の一部を実現するためのものであっても良い。さらに、前述した機能をコンピュータシステムにすでに記録されているプログラムとの組み合わせで実現できるもの、いわゆる差分ファイル(差分プログラム)であっても良い。
【0213】
なお、本実施形態において、例えばステップSa106では、予め設定した閾値よりも最大特異値の値が小さい場合には、得られた情報(複素数データ)の信頼度が低いと判定し、該当ターゲットに対しての次ステップの波数推定の処理を行わなくして、誤検出情報の提供を防いでいる。
例えば、次ステップ以降の波数推定及び方位推定の処理を行わず、当該サイクルにおけるターゲットの情報を検出できずにロストしても、レーダの認識処理として通常後ステップで行われるトラッキングによる外挿手法等を用いることにより、ロストしたターゲットの情報を疑似的に持続することができる。このような手法により、ターゲットをロストすることを回避できるので、間違った方位検出結果を出力するよりキャンセルする方が望ましいという考えに適合することができる。また、できるだけ方位検出をキャンセルしない考えにも適合でき、次ステップの波数推定を行わず、予め定められた値の任意の波数に強制的に指定する(例えば、最大次数や最小次数のいずれか)ことも可能である。このような最大特異値判定を伴った信号の波次数推定処理を行うことによって、例えばピーク検知されたターゲットの中から、ターゲット毎にさらに方位検出するか否かを判定したり、ピーク検知しない仕様としたりする場合でも効果を成すものである。そのピーク検知しない仕様とは、例えば、全ポイント、又は、任意の距離ポイントにおいて無条件に方位検知する等の処理構成のことである。
【0214】
また、本実施形態に示したデータ拡張法に代え、他の方法を用いることも可能である。例えば、抽出した複素数データに値を「0」とするデータを追加してFFT処理を行い、変換後の領域で位相の補正を行った後に、IFFT処理を行い前記位相補正による元の複素数データの領域での波形の広がりを利用しても良いし、各種のデータ外挿アルゴリズムやデータ予測アルゴリズムを適用してもよい。
【0215】
さらに、本実施形態に示した波数推定において、正規化固有値による閾値判定法だけでなく、固有値分解の有効ランク数を推定するフロベニウスノルム比などの手法を適用してもよい。
また、擬似逆行列を作成する際の波数は、例えば、データ拡張用のAR係数を算出するためには最大の波数に固定してもよく、パワースペクトルを算出する波数と独立に設定してもよい。
【符号の説明】
【0216】
1−1,1−n…受信アンテナ
2−1,2−n…ミキサ
3…送信アンテナ
4…分配器
5−1,5−n…フィルタ
6…SW
7…ADC
8…制御部
9…三角波生成部
10…VCO
20A、20B、20C…信号処理部
21…メモリ
22、22B…周波数分解処理部
23、23B…ピーク検知部
24、24B…ピーク組合せ部
25…距離検出部
26…速度検出部
27…ペア確定部
30、30A、30B、30C…方位検出部
31、31B…ターゲット確定部
32、32a、32b、32c、32B、32C…ターゲット連結処理部
40…DBF処理部
310A、310B…データ拡張部
320A、320B…MFBLP部
323、323…特異値分解部
324…波数推定部
325…擬似逆行列算出部
326A、326B、363…AR係数算出部
360…FBLP部
361…正規方程式作成部
370…係数フィルタ部
371、372…AR係数フィルタ部
380A、380B…パワースペクトル算出部
【特許請求の範囲】
【請求項1】
移動体に搭載される電子走査型レーダ装置であり、
送信された送信波を反射したターゲットから到来する受信波を受信する複数のアンテナを含んで構成される受信部と、
前記送信波及び前記受信波からビート信号を生成するビート信号生成部と、
前記ビート信号を予め設定された周波数帯域幅を有するビート周波数に周波数分解して、前記ビート周波数毎に分解された前記ビート信号に基づいた複素数データを算出する周波数分解処理部と、
前記ビート信号に基づいて算出された複素数データに基づいて生成される行列から算出される特異値に基づいて前記受信波の波数を推定し、該推定された波数により定められる信号部分空間に含まれる該行列の擬似逆行列に基づいて算出される係数に基づいて前記受信波の到来方向を算出する方位検出部と
を備えることを特徴とする電子走査型レーダ装置。
【請求項2】
前記方位検出部は、
前記ビート信号に基づいて算出された前記複素数データに基づいて前記係数を算出する第1演算処理部
を備え、
前記第1演算処理部は、
前記ビート信号に基づいて算出された前記複素数データに基づいて前記行列及びベクトルを生成するデータ行列データベクトル生成部と、
前記生成した行列を特異値分解することにより前記特異値を算出する特異値分解部と、
前記算出された特異値に基づいて前記受信波の波数を推定した波数推定値を算出する波数推定部と、
該算出された波数推定値により定められる前記信号部分空間に含まれる前記擬似逆行列を算出する擬似逆行列算出部と、
前記信号部分空間の擬似逆行列及び前記ベクトルから前記係数を算出する係数算出部と
を備えることを特徴とする請求項1に記載の電子走査型レーダ装置。
【請求項3】
前記方位検出部は、
前記算出された複素数データを元にして、該元の複素数データよりデータ数を拡張した拡張複素数データを生成するデータ拡張部
を備え、
前記データ行列データベクトル生成部は、
前記拡張複素数データを要素とする前記行列及び前記ベクトルを生成する
ことを特徴とする請求項2に記載の電子走査型レーダ装置。
【請求項4】
前記データ行列データベクトル生成部は、
前記行列及び前記ベクトルとして、予め定められる次数に増加させた次数増加行列及び次数増加ベクトルを生成する
ことを特徴とする請求項3に記載の電子走査型レーダ装置。
【請求項5】
前記データ行列データベクトル生成部は、
前記行列及び前記ベクトルとして、前記拡張複素数データによる次数を増加させずに、前記拡張複素数データのデータ数を拡張した前記行列及び前記ベクトルを生成する
ことを特徴とする請求項3に記載の電子走査型レーダ装置。
【請求項6】
前記方位検出部は、
前記拡張複素数データを生成する際に元とする前記係数を、前記元の複素数データに基づいて作成される正規方程式により生成する
ことを特徴とする請求項3から請求項5のいずれか1項に記載の電子走査型レーダ装置。
【請求項7】
前記方位検出部は、
前記拡張複素数データを生成する際に元とする前記係数を、前記元の複素数データに基づいて作成された前記正規方程式により生成する第2演算処理部
を備え、
前記データ拡張部は、
前記元の複素数データと前記係数に基づいた線形予測式により前記拡張複素数データを生成する
ことを特徴とする請求項3から請求項6のいずれか1項に記載の電子走査型レーダ装置。
【請求項8】
前記係数は、自己回帰モデルを用いるスペクトル推定法において、該自己回帰モデルを示す線形方程式に基づいて算出される
ことを特徴とする請求項3から請求項7のいずれか1項に記載の電子走査型レーダ装置。
【請求項9】
前記データ拡張部は、
前記受信波の到来方向を算出する処理を繰り返し行う検知サイクルにおける、今回の検知サイクルにおいて算出された前記係数に基づいて前記拡張複素数データを生成する
ことを特徴とする請求項3から請求項8のいずれか1項に記載の電子走査型レーダ装置。
【請求項10】
前記ターゲットに対応付けられた情報を、前記検知サイクルの回数に対応付けて記憶する記憶部
を備え、
前記データ拡張部は、
前記ターゲットに対応付けられた情報として前記記憶部に記憶されており、前記今回の検知サイクルより過去に行われた過去の検知サイクルにおいて算出された前記係数に基づいて前記拡張複素数データを生成する
ことを特徴とする請求項9に記載の電子走査型レーダ装置。
【請求項11】
前記データ拡張部は、
前記今回の検知サイクルにおいて算出された前記元の複素数データと、前記ターゲットに対応付けられた情報として前記記憶部に記憶されており、前記今回の検知サイクルより過去に行われた過去の検知サイクルにおいて算出された過去の複素数データとに基づいて前記拡張複素数データを生成する
ことを特徴とする請求項10に記載の電子走査型レーダ装置。
【請求項12】
前記今回の検知サイクルと、前記過去の検知サイクルとにおいて、それぞれ検知された前記ターゲットを関連付け、前記関連付けられたターゲットに対応付けられた情報を前記記憶部に記憶させるターゲット連結処理部
を備えることを特徴とする請求項10又は請求項12に記載の電子走査型レーダ装置。
【請求項13】
前記ターゲット連結処理部は、
前記今回及び前記過去の検知サイクルにおける前記ターゲットの関連付けを、距離及び相対速度、又は、距離、相対速度及び方位により行う
ことを特徴とする請求項12項に記載の電子走査型レーダ装置。
【請求項14】
前記方位検出部は、
前記ターゲットに対応付けられた前記情報である前記係数を平均する係数フィルタ部
を備えることを特徴とする請求項12又は請求項13に記載の電子走査型レーダ装置。
【請求項15】
前記係数フィルタ部は、
前記第1演算処理部によって算出され、前記ターゲットに対応付けられた前記係数を
平均する第1係数フィルタ部
を備えることを特徴とする請求項14に記載の電子走査型レーダ装置。
【請求項16】
前記係数フィルタ部は、
前記第2演算処理部によって算出され、前記ターゲットに対応付けられた前記係数を
平均する第2係数フィルタ部
を備えることを特徴とする請求項14又は請求項15に記載の電子走査型レーダ装置。
【請求項17】
前記ビート周波数の強度値からピーク値を検出して前記ターゲットの存在を検知するピーク検知部
を備え、
前記方位検出部は、
前記ピーク検知部によって存在が検知されたターゲットに対応する前記複素数データに基づいて、前記受信波の到来方向を算出する
ことを特徴とする請求項1から請求項16のいずれか1項に記載の電子走査型レーダ装置。
【請求項18】
前記複素数データに基づいて、前記受信波を受信する所望の方向の受信感度を高めるデジタルビームフォーミングに基づいて前記ターゲットの存在及び方位を検出するDBF部
をさらに備え、
前記ピーク検知部は、
前記今回の検知サイクルにおけるビート周波数における前記デジタルビームフォーミングに基づいて前記ターゲットの方位を検出する
ことを特徴とする請求項1から請求項17のいずれか1項に記載の電子走査型レーダ装置。
【請求項19】
移動体に搭載される電子走査型レーダ装置による受信波方向推定方法であり、
受信部が、送信された送信波を反射したターゲットから到来する受信波を受信する複数のアンテナを含んで構成される受信過程と、
ビート信号生成部が前記送信波及び前記受信波からビート信号を生成するビート信号生成過程と、
周波数分解処理部が前記ビート信号を予め設定された周波数帯域幅を有するビート周波数に周波数分解して、前記ビート周波数毎に分解された前記ビート信号に基づいた複素数データを算出する周波数分解処理過程と、
前記ビート信号に基づいて算出された複素数データに基づいて生成される行列から算出される特異値に基づいて前記受信波の波数を推定し、該推定された波数により定められる信号部分空間に含まれる該行列の擬似逆行列に基づいて算出される係数に基づいて前記受信波の到来方向を算出する方位検出過程と
を含むことを特徴とする受信波方向推定方法。
【請求項20】
移動体に搭載される電子走査型レーダ装置により受信波方向推定の処理をコンピュータに実行させるためのプログラムであり、
送信された送信波を反射したターゲットから到来する受信波を受信する複数のアンテナを含んで構成される受信処理手順と、
前記送信波及び前記受信波からビート信号を生成するビート信号生成処理手順と、
前記ビート信号を予め設定された周波数帯域幅を有するビート周波数に周波数分解して、前記ビート周波数毎に分解された前記ビート信号に基づいた複素数データを算出する周波数分解処理手順と、
前記ビート信号に基づいて算出された複素数データに基づいて生成される行列から算出される特異値に基づいて前記受信波の波数を推定し、該推定された波数により定められる信号部分空間に含まれる該行列の擬似逆行列に基づいて算出される係数に基づいて前記受信波の到来方向を算出する方位検出手順と
を実行させるためのプログラム。
【請求項1】
移動体に搭載される電子走査型レーダ装置であり、
送信された送信波を反射したターゲットから到来する受信波を受信する複数のアンテナを含んで構成される受信部と、
前記送信波及び前記受信波からビート信号を生成するビート信号生成部と、
前記ビート信号を予め設定された周波数帯域幅を有するビート周波数に周波数分解して、前記ビート周波数毎に分解された前記ビート信号に基づいた複素数データを算出する周波数分解処理部と、
前記ビート信号に基づいて算出された複素数データに基づいて生成される行列から算出される特異値に基づいて前記受信波の波数を推定し、該推定された波数により定められる信号部分空間に含まれる該行列の擬似逆行列に基づいて算出される係数に基づいて前記受信波の到来方向を算出する方位検出部と
を備えることを特徴とする電子走査型レーダ装置。
【請求項2】
前記方位検出部は、
前記ビート信号に基づいて算出された前記複素数データに基づいて前記係数を算出する第1演算処理部
を備え、
前記第1演算処理部は、
前記ビート信号に基づいて算出された前記複素数データに基づいて前記行列及びベクトルを生成するデータ行列データベクトル生成部と、
前記生成した行列を特異値分解することにより前記特異値を算出する特異値分解部と、
前記算出された特異値に基づいて前記受信波の波数を推定した波数推定値を算出する波数推定部と、
該算出された波数推定値により定められる前記信号部分空間に含まれる前記擬似逆行列を算出する擬似逆行列算出部と、
前記信号部分空間の擬似逆行列及び前記ベクトルから前記係数を算出する係数算出部と
を備えることを特徴とする請求項1に記載の電子走査型レーダ装置。
【請求項3】
前記方位検出部は、
前記算出された複素数データを元にして、該元の複素数データよりデータ数を拡張した拡張複素数データを生成するデータ拡張部
を備え、
前記データ行列データベクトル生成部は、
前記拡張複素数データを要素とする前記行列及び前記ベクトルを生成する
ことを特徴とする請求項2に記載の電子走査型レーダ装置。
【請求項4】
前記データ行列データベクトル生成部は、
前記行列及び前記ベクトルとして、予め定められる次数に増加させた次数増加行列及び次数増加ベクトルを生成する
ことを特徴とする請求項3に記載の電子走査型レーダ装置。
【請求項5】
前記データ行列データベクトル生成部は、
前記行列及び前記ベクトルとして、前記拡張複素数データによる次数を増加させずに、前記拡張複素数データのデータ数を拡張した前記行列及び前記ベクトルを生成する
ことを特徴とする請求項3に記載の電子走査型レーダ装置。
【請求項6】
前記方位検出部は、
前記拡張複素数データを生成する際に元とする前記係数を、前記元の複素数データに基づいて作成される正規方程式により生成する
ことを特徴とする請求項3から請求項5のいずれか1項に記載の電子走査型レーダ装置。
【請求項7】
前記方位検出部は、
前記拡張複素数データを生成する際に元とする前記係数を、前記元の複素数データに基づいて作成された前記正規方程式により生成する第2演算処理部
を備え、
前記データ拡張部は、
前記元の複素数データと前記係数に基づいた線形予測式により前記拡張複素数データを生成する
ことを特徴とする請求項3から請求項6のいずれか1項に記載の電子走査型レーダ装置。
【請求項8】
前記係数は、自己回帰モデルを用いるスペクトル推定法において、該自己回帰モデルを示す線形方程式に基づいて算出される
ことを特徴とする請求項3から請求項7のいずれか1項に記載の電子走査型レーダ装置。
【請求項9】
前記データ拡張部は、
前記受信波の到来方向を算出する処理を繰り返し行う検知サイクルにおける、今回の検知サイクルにおいて算出された前記係数に基づいて前記拡張複素数データを生成する
ことを特徴とする請求項3から請求項8のいずれか1項に記載の電子走査型レーダ装置。
【請求項10】
前記ターゲットに対応付けられた情報を、前記検知サイクルの回数に対応付けて記憶する記憶部
を備え、
前記データ拡張部は、
前記ターゲットに対応付けられた情報として前記記憶部に記憶されており、前記今回の検知サイクルより過去に行われた過去の検知サイクルにおいて算出された前記係数に基づいて前記拡張複素数データを生成する
ことを特徴とする請求項9に記載の電子走査型レーダ装置。
【請求項11】
前記データ拡張部は、
前記今回の検知サイクルにおいて算出された前記元の複素数データと、前記ターゲットに対応付けられた情報として前記記憶部に記憶されており、前記今回の検知サイクルより過去に行われた過去の検知サイクルにおいて算出された過去の複素数データとに基づいて前記拡張複素数データを生成する
ことを特徴とする請求項10に記載の電子走査型レーダ装置。
【請求項12】
前記今回の検知サイクルと、前記過去の検知サイクルとにおいて、それぞれ検知された前記ターゲットを関連付け、前記関連付けられたターゲットに対応付けられた情報を前記記憶部に記憶させるターゲット連結処理部
を備えることを特徴とする請求項10又は請求項12に記載の電子走査型レーダ装置。
【請求項13】
前記ターゲット連結処理部は、
前記今回及び前記過去の検知サイクルにおける前記ターゲットの関連付けを、距離及び相対速度、又は、距離、相対速度及び方位により行う
ことを特徴とする請求項12項に記載の電子走査型レーダ装置。
【請求項14】
前記方位検出部は、
前記ターゲットに対応付けられた前記情報である前記係数を平均する係数フィルタ部
を備えることを特徴とする請求項12又は請求項13に記載の電子走査型レーダ装置。
【請求項15】
前記係数フィルタ部は、
前記第1演算処理部によって算出され、前記ターゲットに対応付けられた前記係数を
平均する第1係数フィルタ部
を備えることを特徴とする請求項14に記載の電子走査型レーダ装置。
【請求項16】
前記係数フィルタ部は、
前記第2演算処理部によって算出され、前記ターゲットに対応付けられた前記係数を
平均する第2係数フィルタ部
を備えることを特徴とする請求項14又は請求項15に記載の電子走査型レーダ装置。
【請求項17】
前記ビート周波数の強度値からピーク値を検出して前記ターゲットの存在を検知するピーク検知部
を備え、
前記方位検出部は、
前記ピーク検知部によって存在が検知されたターゲットに対応する前記複素数データに基づいて、前記受信波の到来方向を算出する
ことを特徴とする請求項1から請求項16のいずれか1項に記載の電子走査型レーダ装置。
【請求項18】
前記複素数データに基づいて、前記受信波を受信する所望の方向の受信感度を高めるデジタルビームフォーミングに基づいて前記ターゲットの存在及び方位を検出するDBF部
をさらに備え、
前記ピーク検知部は、
前記今回の検知サイクルにおけるビート周波数における前記デジタルビームフォーミングに基づいて前記ターゲットの方位を検出する
ことを特徴とする請求項1から請求項17のいずれか1項に記載の電子走査型レーダ装置。
【請求項19】
移動体に搭載される電子走査型レーダ装置による受信波方向推定方法であり、
受信部が、送信された送信波を反射したターゲットから到来する受信波を受信する複数のアンテナを含んで構成される受信過程と、
ビート信号生成部が前記送信波及び前記受信波からビート信号を生成するビート信号生成過程と、
周波数分解処理部が前記ビート信号を予め設定された周波数帯域幅を有するビート周波数に周波数分解して、前記ビート周波数毎に分解された前記ビート信号に基づいた複素数データを算出する周波数分解処理過程と、
前記ビート信号に基づいて算出された複素数データに基づいて生成される行列から算出される特異値に基づいて前記受信波の波数を推定し、該推定された波数により定められる信号部分空間に含まれる該行列の擬似逆行列に基づいて算出される係数に基づいて前記受信波の到来方向を算出する方位検出過程と
を含むことを特徴とする受信波方向推定方法。
【請求項20】
移動体に搭載される電子走査型レーダ装置により受信波方向推定の処理をコンピュータに実行させるためのプログラムであり、
送信された送信波を反射したターゲットから到来する受信波を受信する複数のアンテナを含んで構成される受信処理手順と、
前記送信波及び前記受信波からビート信号を生成するビート信号生成処理手順と、
前記ビート信号を予め設定された周波数帯域幅を有するビート周波数に周波数分解して、前記ビート周波数毎に分解された前記ビート信号に基づいた複素数データを算出する周波数分解処理手順と、
前記ビート信号に基づいて算出された複素数データに基づいて生成される行列から算出される特異値に基づいて前記受信波の波数を推定し、該推定された波数により定められる信号部分空間に含まれる該行列の擬似逆行列に基づいて算出される係数に基づいて前記受信波の到来方向を算出する方位検出手順と
を実行させるためのプログラム。
【図1】

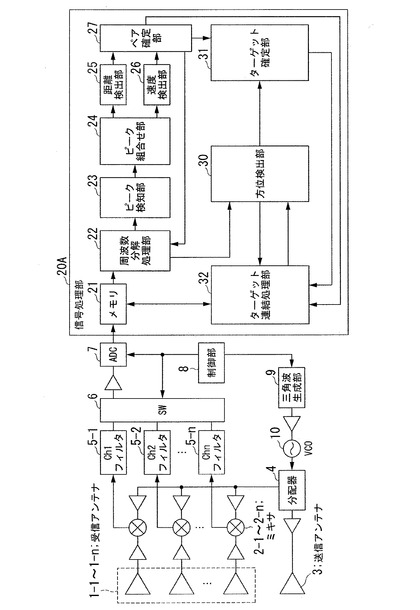
【図2】
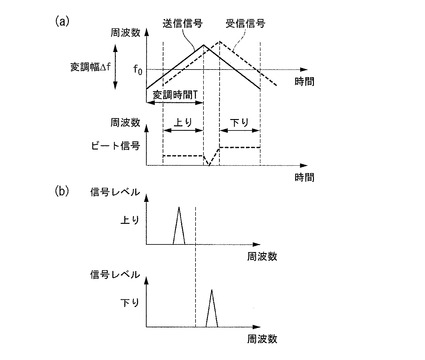
【図3】
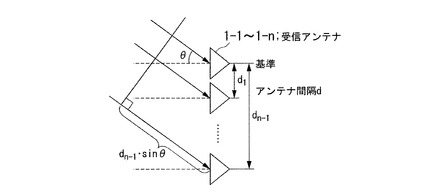
【図4】
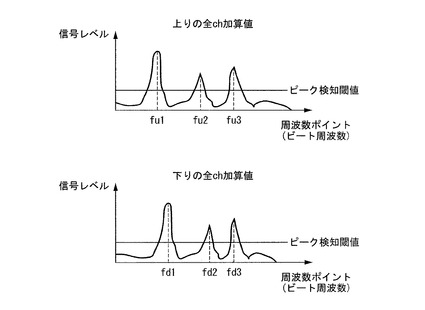
【図5】
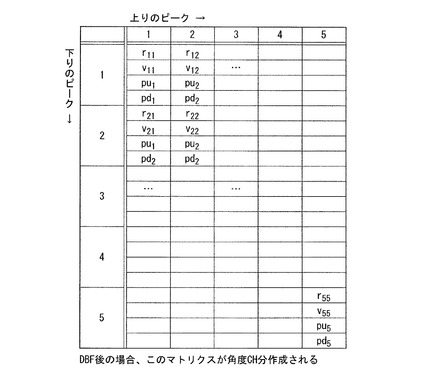
【図6】
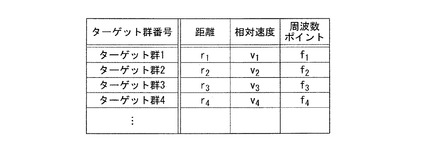
【図7】
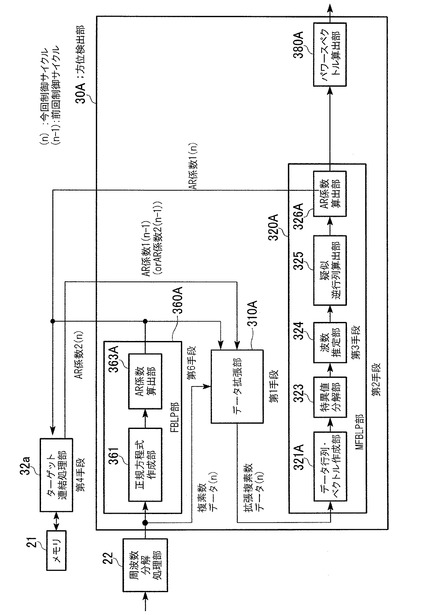
【図8】
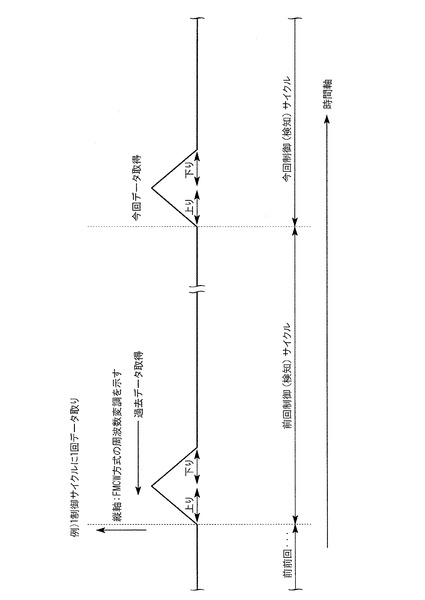
【図9】
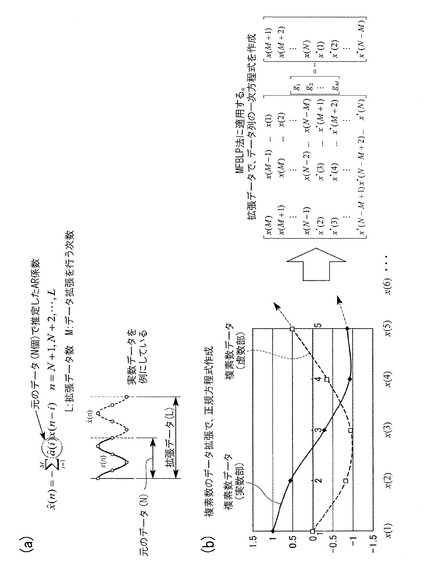
【図10】
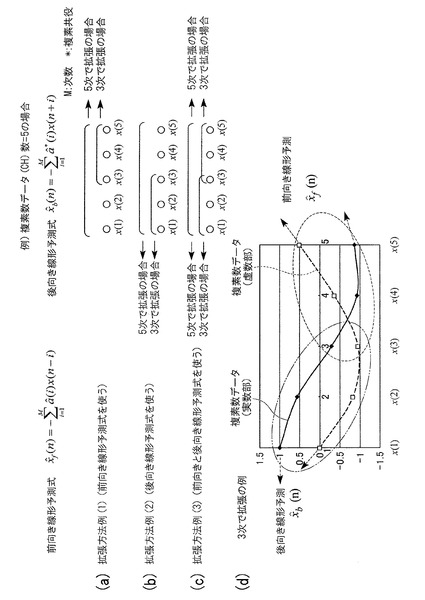
【図11】
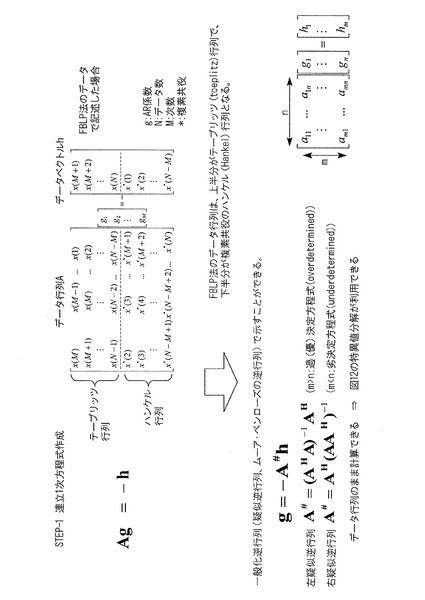
【図12】
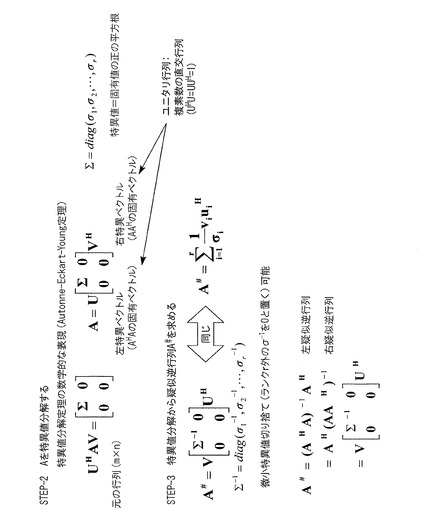
【図13】
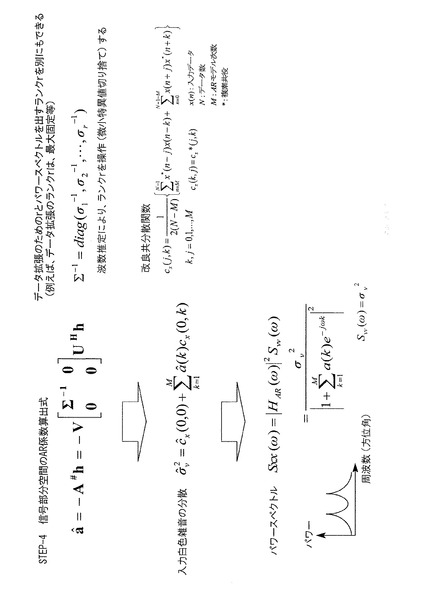
【図14】
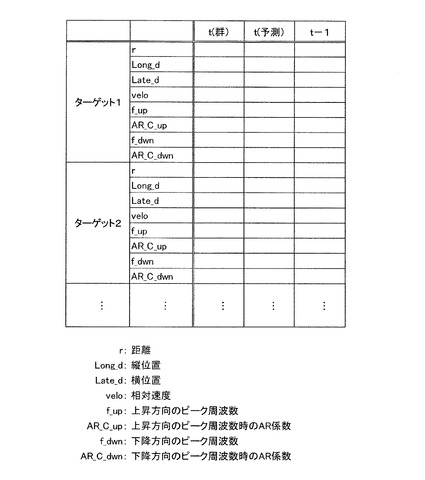
【図15】
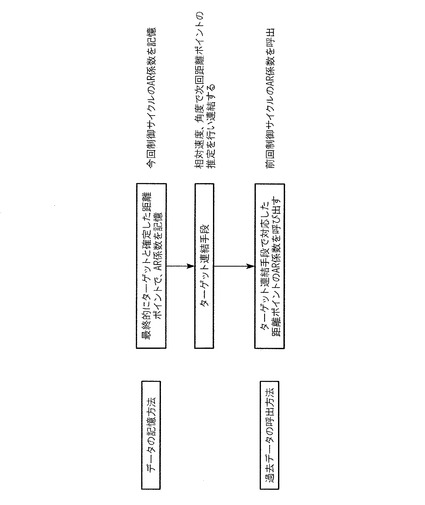
【図16】
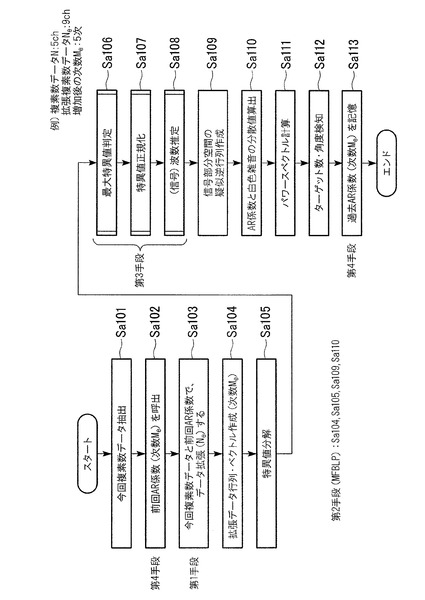
【図17】
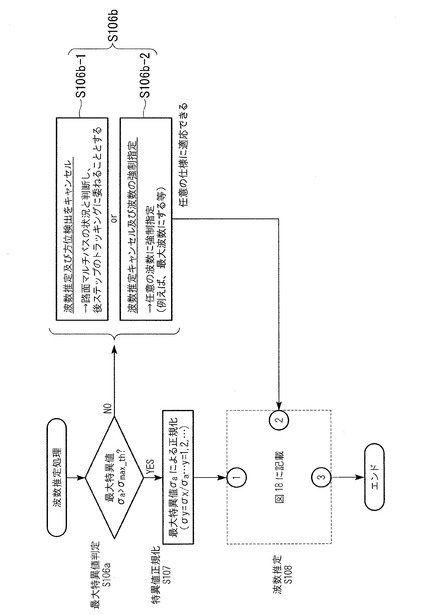
【図18】
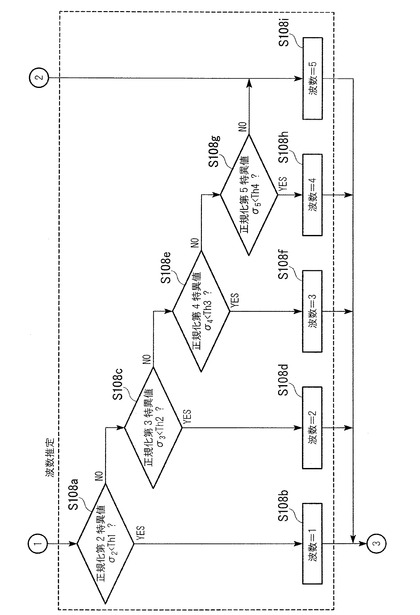
【図19】
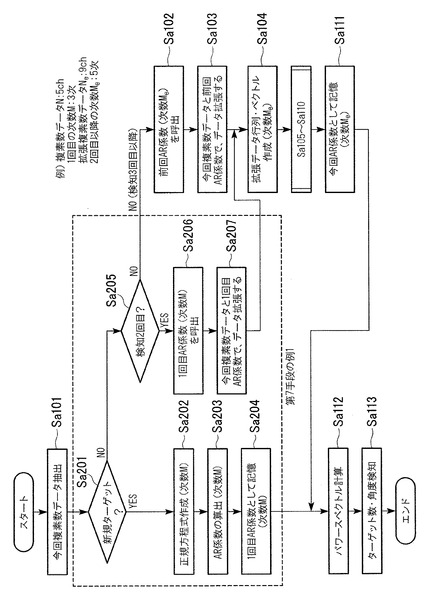
【図20】
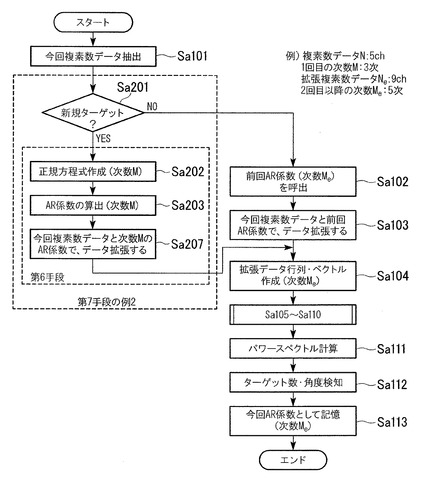
【図21】
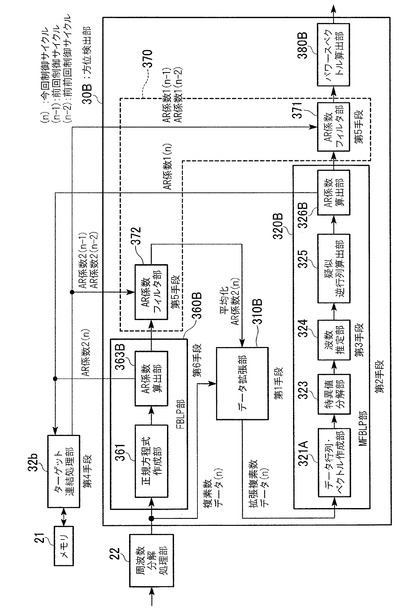
【図22】
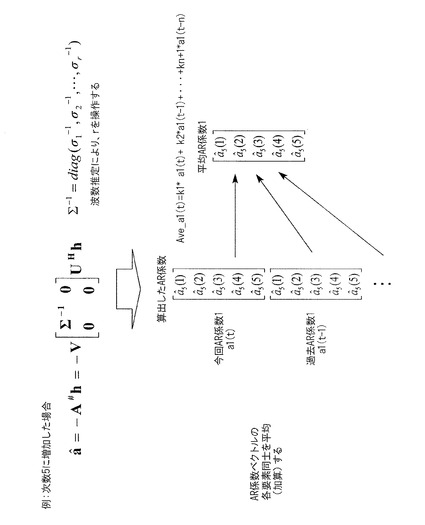
【図23】
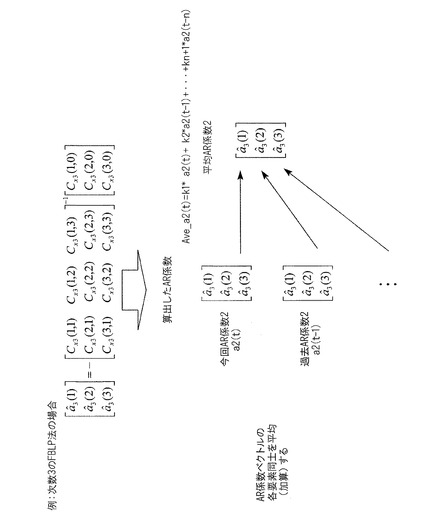
【図24】
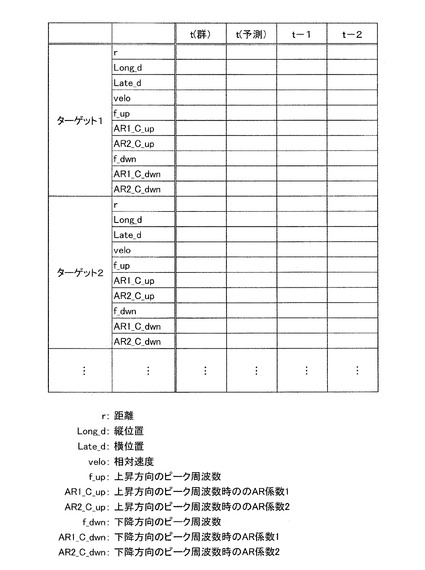
【図25】
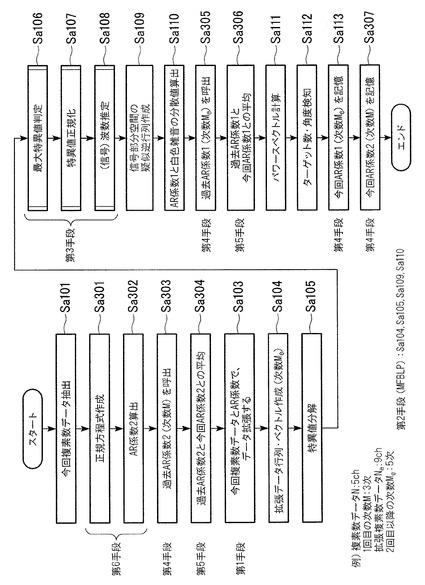
【図26】
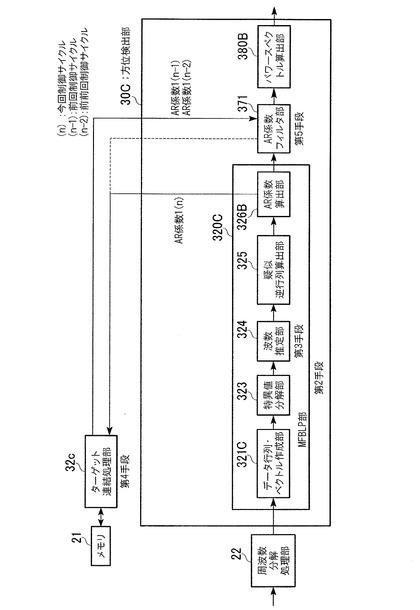
【図27】
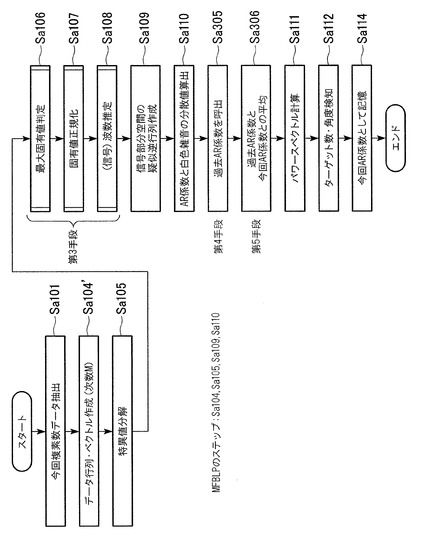
【図28】
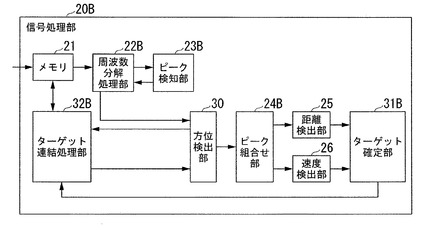
【図29】
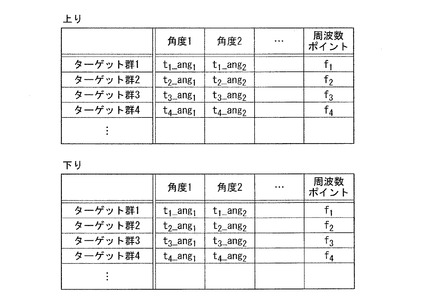
【図30】
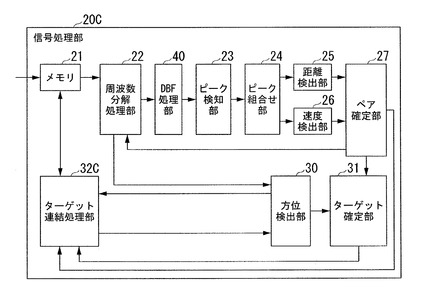
【図31】
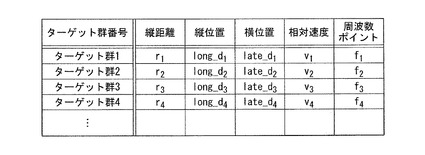
【図32】
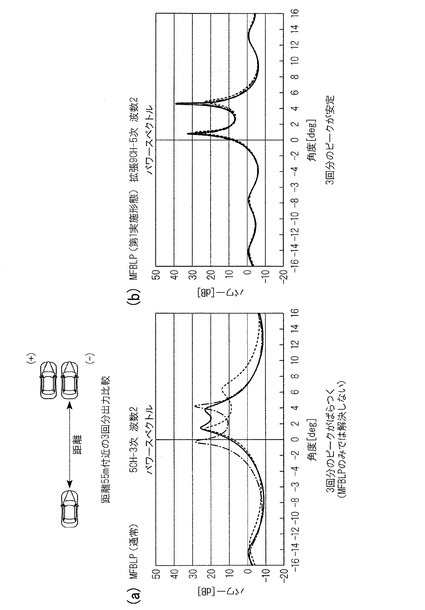
【図33】
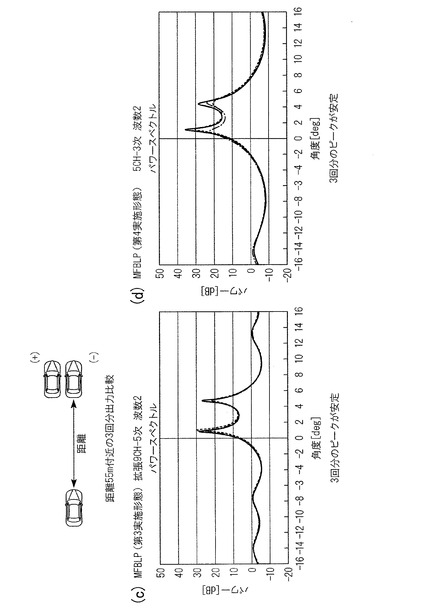
【図34】
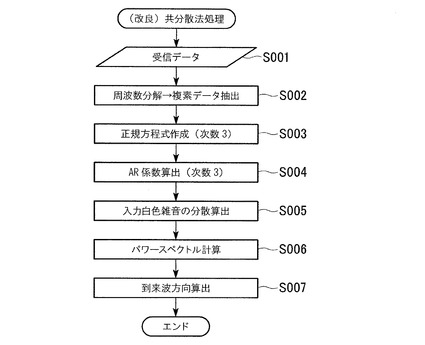
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】
【図26】
【図27】
【図28】
【図29】
【図30】
【図31】
【図32】
【図33】
【図34】
【公開番号】特開2012−163403(P2012−163403A)
【公開日】平成24年8月30日(2012.8.30)
【国際特許分類】
【出願番号】特願2011−22825(P2011−22825)
【出願日】平成23年2月4日(2011.2.4)
【出願人】(300052246)株式会社ホンダエレシス (105)
【Fターム(参考)】
【公開日】平成24年8月30日(2012.8.30)
【国際特許分類】
【出願日】平成23年2月4日(2011.2.4)
【出願人】(300052246)株式会社ホンダエレシス (105)
【Fターム(参考)】
[ Back to top ]