
電子部品の実装装置及び実装方法
【課題】基板に実装された半導体チップの実装状態の良否を確実に判定することができるようにした実装装置を提供することにある。
【解決手段】半導体チップ4のバンプ4aを基板1に押圧しながら超音波振動を付与してバンプを基板に接合させて半導体チップを実装する実装ツール7と、基板に実装された半導体チップのバンプを半導体チップを介して撮像する赤外線カメラ33と、赤外線カメラの撮像信号を画像処理する画像処理部34と、画像処理部で処理された撮像信号からバンプのつぶれ度合を求めてバンプによる半導体チップの実装状態を判定する比較部37を具備する。
【解決手段】半導体チップ4のバンプ4aを基板1に押圧しながら超音波振動を付与してバンプを基板に接合させて半導体チップを実装する実装ツール7と、基板に実装された半導体チップのバンプを半導体チップを介して撮像する赤外線カメラ33と、赤外線カメラの撮像信号を画像処理する画像処理部34と、画像処理部で処理された撮像信号からバンプのつぶれ度合を求めてバンプによる半導体チップの実装状態を判定する比較部37を具備する。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は超音波振動を利用して電子部品を基板に実装する実装装置及び実装方法に関する。
【背景技術】
【0002】
たとえば、電子部品であるバンプ付きの半導体チップをポリイミド製のテープ状部材などの基板のパッドに実装する場合、上記半導体チップに押圧荷重と超音波振動を与えながら上記基板に実装する方法が知られている。つまり、半導体チップを基板に設けられたパッドに所定の圧力で加圧するとともに加熱し、さらにその半導体チップに超音波振動を付与することで、上記基板のパッドに半導体チップのバンプを固相拡散によって接合させるというものである。
【0003】
このような半導体チップの実装は実装ツールを用いて行われる。実装ツールはヒータが内蔵された超音波ヘッドを有する。この超音波ヘッドには上記半導体チップを吸着保持する吸着部が一体的に設けられている。そして、上記吸着部に半導体チップが受け渡されると、上記実装ツールは上記基板の実装位置の上方に位置決めされてから、下降方向に駆動される。それによって、上記吸着部に保持された上記半導体チップが加圧力、熱及び超音波振動によって基板に実装されるというものである。
【0004】
超音波振動を利用して半導体チップを基板に確実に実装する場合、接合に大きく寄与する超音波振動を実装ツールの超音波ヘッドから半導体チップへ効率よく伝達することが要求される。
【0005】
しかしながら、実際には実装ツールの吸着部と、この吸着部に吸着保持される半導体チップの間に異物が混入したり、上記吸着部の磨耗によって半導体チップとの間に滑りが生じたり、実装ツールに加えられる加圧力にばらつきが生じることで、超音波振動が実装ツールから半導体チップに効率よく確実に伝達されないということがある。そのような場合、半導体チップに設けられたバンプが確実に押しつぶされないため、バンプが基板のパッドに所定の強度で接合されないという、接合不良を招くことになる。
【0006】
そこで、半導体チップを基板に実装したならば、バンプが確実に押しつぶされているか否かを検査し、その検査に基づいて半導体チップの接合状態を判定するということが行われている。
【0007】
バンプが確実に押しつぶされているか否かを検査する場合、半導体チップを基板に実装したならば、その半導体チップの上面の高さを検出し、その高さによってバンプが確実に押しつぶされているか否かを判定するようにしている。
【0008】
特許文献1には、基材(基板)に被接合物(半導体チップ)を超音波振動を利用して実装した後、ホーンの先端に設けられたチップ(実装ツール)の位置(高さ)を位置変位センサによって予め規定された位置にあるか否かを判別して接合状態の良否を判定することが示されている。
【特許文献1】特開2001−105159号公報
【発明の開示】
【発明が解決しようとする課題】
【0009】
特許文献1に示されるように、半導体チップを接合した後の実装ツールの位置を判別する方法によると、半導体チップの実装を繰り返して行うことで、実装ツールの半導体チップを吸着保持する吸着部が磨耗してくるため、半導体チップの接合状態の良否に係らず、実装後に位置変位センサによって検出される実装ツールの位置が変化してくる。
【0010】
そのため、実装後における実装ツールの位置から半導体チップの接合状態の良否を判定するようにすると、実装ツールの使用に伴う磨耗に対して対応できないため、半導体チップが確実に接合されているか否かの判定が確実に行えなくなるということがある。
【0011】
しかも、実装後における実装ツールの高さは、接合状態の良否に係らず、実装前におけるバンプの高さや基板の厚さなどのばらつきによっても変化するから、実装後に実装ツールの高さを検出する方法では実際の接合状態を正確に判定することができないということもある。
【0012】
この発明は、実装ツールの高さによらず、基板と電子部品の接合状態を正確に判定できるようにすることで、実装ツールの磨耗、バンプの高さや基板の厚さのばらつきなどに対応することができるようにした電子部品の実装装置及び実装方法を提供することにある。
【課題を解決するための手段】
【0013】
この発明は、基板に電子部品を、この電子部品に設けられたバンプを介して実装する実装装置であって、
上記電子部品のバンプを上記基板に押圧しながら超音波振動を付与して上記バンプを上記基板に接合させて上記電子部品を実装する実装ツールと、
上記基板に実装された上記電子部品のバンプをこの電子部品を介して撮像する撮像手段と、
この撮像手段の撮像信号を画像処理する画像処理部と、
この画像処理部で処理された撮像信号から上記バンプのつぶれ度合を求めて上記バンプによる上記電子部品の実装状態を判定する判定手段と
を具備したことを特徴とする電子部品の実装装置にある。
【0014】
上記撮像手段は、
上記電子部品を透過する波長領域の照射光を出射する光源と、上記電子部品を透過して反射した上記照射光を撮像する撮像カメラとによって構成されていることが好ましい。
【0015】
この発明は、基板に電子部品を、この電子部品に設けられたバンプを介して実装する実装方法であって、
上記電子部品のバンプを上記基板に押圧しながら超音波振動を付与して上記バンプを上記基板に接合させて実装する工程と、
上記基板に実装された上記電子部品のバンプを撮像する工程と、
上記バンプの撮像信号から上記バンプのつぶれ度合を求める工程と、
上記バンプのつぶれ度合から上記電子部品の実装状態を判定する工程と
を具備したことを特徴とする電子部品の実装方法にある。
【0016】
上記電子部品を透過する波長領域の照射光を照射し、上記バンプで反射する照射光によって上記バンプのつぶれ度合を求めることが好ましい。
【0017】
上記バンプのつぶれ度合による面積の変化を求め、その面積の変化によって上記電子部品の実装状態を判定することが好ましい。
【発明の効果】
【0018】
この発明によれば、基板に電子部品を実装したならば、バンプのつぶれ度合を測定して電子部品の実装状態を判定するため、実装ツールの磨耗、バンプの高さや基板の厚さのばらつきなどに係らず、基板に対する電子部品の接合状態を正確に判定することができる。
【発明を実施するための最良の形態】
【0019】
以下、この発明の一実施の形態を図面を参照して説明する。
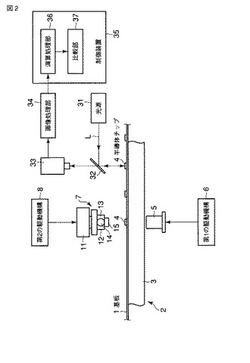
図1はフリップチップ方式の実装装置の概略的構成を示す正面図、図2は同じく側面図であって、この実装装置はリードフレームなどの基板1を所定方向に沿って搬送する搬送装置2を備えている。この搬送装置2は所定間隔で平行に配置された一対のガイドレール3を有し、このガイドレール3に沿って上記基板1が間欠的にピッチ送りされるようになっている。上記基板1はピッチ送りされるごとに、図示せぬクランパによって上記ガイドレール3に位置決め保持されるようになっている。
【0020】
上記基板1が搬送装置2によって実装位置に搬送されると、その実装位置には後述する部品供給部21(図1に示す)から供給された電子部品としての厚さが数百ミクロンの薄い半導体チップ4が実装される。この実装位置には、上記基板1の下面を支持するステージツール5が第1の駆動機構6によって水平方向であるX、Y及び上下方向であるZ方向に駆動可能に設けられている。
【0021】
上記ステージツール5の上方には、上記基板1の上面に上記半導体チップ4を実装するための実装ツール7が第2の駆動機構8によってX、Y及びZ方向に駆動可能に設けられている。
【0022】
上記実装ツール7は基部11を有し、この基部11の下面には超音波ヘッド12が設けられている。この超音波ヘッド12はホーン13を有し、このホーン13の一端には振動子14が設けられている。上記ホーン13の下面には吸着部15が設けられ、この吸着部15に上記半導体チップ4が後述するように吸着保持される。
【0023】
上記振動子14には図示しない発振器が接続されていて、この発振器からたとえば40kHzの高周波電圧が印加される。それによって、上記振動子14とともに上記ホーン13が超音波振動するようになっている。
【0024】
上記部品供給部21は図示せぬ駆動源によってX、Y方向に駆動されるウエハステージ22を有する。このウエハステージ22には多数の半導体チップ4に分割された半導体ウエハ23がウエハシート24に保持されている。
【0025】
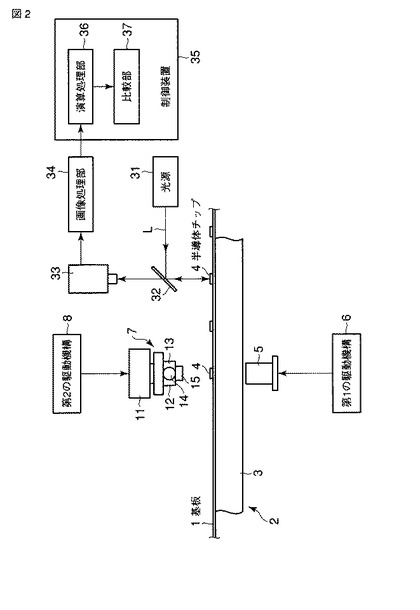
図3に示すように、上記半導体チップ4はその一方の面に上記基板1に形成されたパッド1aに電気的に接続される複数のバンプ4a(図4(a)に示す)が形成されていて、このバンプ4aが形成された面を上にして上記ウエハシート24に保持されている。
【0026】
上記ウエハシート24に保持された半導体チップ4のうち、所定の位置の半導体チップ4は図示せぬ突き上げピンによって突き上げられる。突き上げピンによって突き上げられた半導体チップ4はピックアップ装置25を構成する吸着ノズル26によって吸着される。この吸着ノズル26は反転ユニット27に設けられた回転ヘッド28に取り付けられている。
【0027】
上記回転ヘッド28は回転駆動される。それによって、上記吸着ノズル26は、図1に実線で示す吸着面26aが下を向いた位置と、その位置から180度回転して上方を向いた位置(同図に鎖線で示す)とに位置決めされる。
【0028】
上記反転ユニット27はガイドロッド29に沿って駆動されるようになっている。このガイドロッド29は上記ウエハステージ22から上記搬送装置2の実装位置に向かって水平に架設されている。それによって、上記ウエハシート24から半導体チップ4を吸着した吸着ノズル26は、図1に鎖線で示すように半導体チップ4を吸着した吸着面26aを上にして搬送装置2の側方に駆動されて位置決めされる。この位置を受け渡し位置とする。
【0029】
吸着ノズル26が受け渡し位置に位置決めされると、同図に鎖線で示すように実装ツール7が駆動され、上記吸着ノズル26の吸着面26aに吸着された半導体チップ4を受け取る。ついで、この実装ツール7が実線で示すように基板1の上方の実装位置に位置決めされる。
【0030】
それと同時に、上記ステージツール5が上昇方向に駆動されて基板1の下面を支持する。そして、上記実装ツール7が下降方向に駆動されることで、上記基板1の上記ステージツール5によって支持された部分に、上記実装ツール7に保持された半導体チップ4が実装されることになる。
【0031】
なお、上記ステージツール5と実装ツール7のホーン13には、それぞれ図示しないヒータが設けられている。それによって、上記半導体チップ4や基板1の半導体チップ4が実装される部分を加熱しながら、上記半導体チップ4を基板1に超音波振動を与えながら熱圧着するようになっている。つまり、半導体チップ4に設けられたバンプ4aが押しつぶされて上記基板1に設けられたパッド1aに固相拡散によって接合される。
【0032】
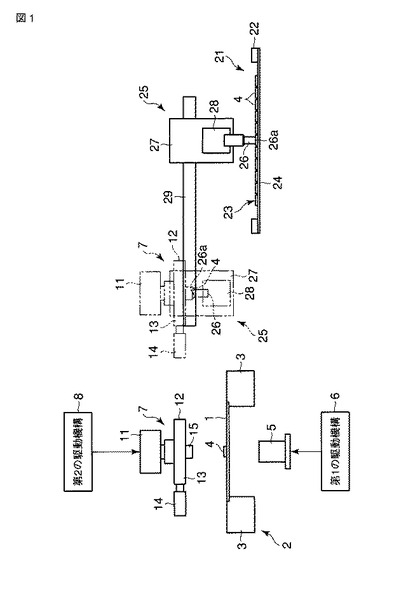
半導体チップ4が実装された基板1は搬送装置2のガイドレール3に沿って所定のピッチで間欠的に搬送され、上記基板1には図2に示すように半導体チップ4が所定間隔で順次実装される。実装ツール7によって基板1に実装された半導体チップ4が実装位置から所定ピッチ(この実施の形態では2ピッチ)搬送されると、その半導体チップ4には近赤外線や中赤外線などの赤外線領域の波長をもつ照射光Lが照射される。照射光Lは光源31から光軸を水平にして出射され、上記基板1の上方に45度の角度で配設された半透鏡32で下方に向かって反射して半導体チップ4の上面を照射する。
【0033】
半導体チップ4を照射した照射光Lは、その波長が赤外線領域であるため、厚さが数百μmの薄い上記半導体チップ4を透過し、押しつぶされたバンプ24や基板1のパッド1aなどで反射する。反射した照射光Lは上記半透鏡32を透過して上記半透鏡32とで撮像手段を構成する撮像カメラとしての赤外線カメラ33によって受光される。
【0034】
赤外線カメラ33に入射した照射光Lは画像処理部34で二値化処理される。つまり、上記バンプ4aとバンプ4a以外の部分は、それらの材料の違いにより反射率が異なるから、上記バンプ4aで反射した照射光Lと、バンプ4a以外の部分で反射した照射光Lとの輝度に差が生じるから、その輝度の差によって二値化処理される。
【0035】
上記画像処理部34で二値化処理された撮像信号は制御装置35に出力される。この制御装置35は二値化処理された撮像信号から上記バンプ4aの面積を求める演算処理部36と、この演算処理部36で算出されたバンプ4aの面積を予め設定された基準面積と比較して上記バンプ4aのつぶれ度合を判定し、判定信号を出力する判定手段としての比較部37を有する。
【0036】
上記半導体チップ4を基板1に実装したとき、上記バンプ24の面積が20〜30%程度拡大していれば、上記バンプ24が十分に押しつぶされていると判定することができる。したがって、上記比較部37では実装前のバンプ24の面積に対して測定された実装後のバンプ24の面積がどの程度拡大されているかを比較して判定信号を出力するようになっている。
【0037】
このような構成の実装装置によれば、搬送装置2によって基板1がピッチ送りされる度に、その基板1に対して半導体チップ4が実装ツール7によって実装される。半導体チップ4は実装ツール7から付与される加圧力、熱及び超音波振動によってそのバンプ4aが押しつぶされて基板1のパッド1aに固相拡散接合される。
【0038】
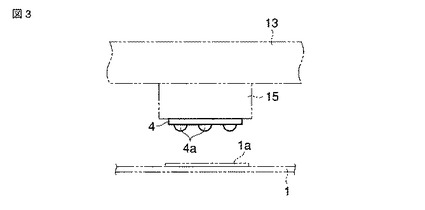
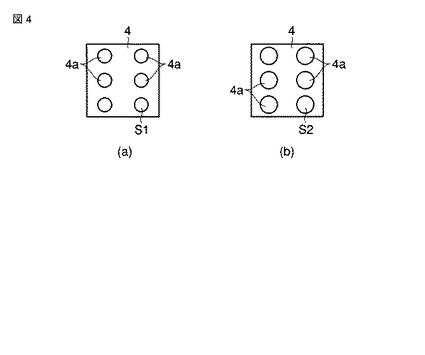
図4(a)は基板1に実装される前の半導体チップ4のバンプ4aを示し、図4(b)は実装されることで押しつぶされたバンプ4aを示す。実装前のバンプ4aの面積をS1、実装後のバンプ4aの面積をS2とすると、S1<S2であって、上述したようにS2がS1の1.2〜1.3倍程度であれば、上記バンプ4aが十分に押しつぶされて半導体チップ4が実装されているということになる。
【0039】
実装位置で基板1に実装された半導体チップ4が赤外線カメラ33の上方に搬送されると、その半導体チップ4に光源31から出射されて半透鏡32で反射した赤外線領域の波長の照射光Lが照射される。
【0040】
照射光Lは半導体チップ4の厚さが数百ミクロンと非常に薄いため、この半導体チップ4を透過してバンプ4aや基板1のパッド1aなどで反射し、上記半透鏡32を通って上記赤外線カメラ33に入射する。
【0041】
赤外線カメラ33に入射した照射光Lは画像処理部34で二値化処理されてから、制御装置35の演算処理部36で押しつぶされたバンプ4aの面積が求められた後、比較部37で基準面積と比較されて上記バンプ4aのつぶれ度合が判定される。
【0042】
つまり、半導体チップ4を基板1に実装したならば、実装後のバンプ4aのつぶれ度合に応じた面積の変化から半導体チップ4が基板1に確実に実装されているか否かを判定するようにした。
【0043】
そのため、従来のように実装ツール7の使用に伴う吸着部15の磨耗、或いは基板1や半導体チップ4の厚さのばらつきなどに影響を受けることなく、基板1に対する半導体チップ4の実装状態を確実かつ精密に判定することが可能となるから、不良品の発生を未然に防止することができる。
【0044】
上記一実施の形態では基板に実装された半導体チップのバンプのつぶれ度合を撮像するために赤外線領域の照射光を上記半導体チップに照射するようにしたが、照射光としては赤外線領域の光だけに限られず、上記半導体チップに対して光学的に透明な他の波長の光、たとえばレーザ光やX線などを用いるようにしてもよい。
【0045】
また、上述した実施の形態では孔が根から照射された照射光がバンプやパッドで反射した反射光をカメラで撮像するようにしたが、半導体チップと基板を透過した透過光によってバンプの押しつぶされた量を測定するようにしてもよい。
【0046】
その場合、バンプが押しつぶされると、その面積が増大するから、測定される透過光は押しつぶされたバンプが適切である場合は少なくなる。したがって、透過光量の割合を測定すれば、バンプが適切に押しつぶされているか否かを判定することができる。
【図面の簡単な説明】
【0047】
【図1】この発明の一実施の形態の実装装置の概略的構成を示す正面図。
【図2】同じく側面図。
【図3】吸着部に吸着保持された半導体チップの拡大図。
【図4】(a)は実装前のバンプの大きさを説明するための半導体チップの平面図、(b)は実装後のバンプの大きさを説明するための半導体チップの平面図。
【符号の説明】
【0048】
1…基板、4…半導体チップ(電子部品)、7…実装ツール、12…超音波ヘッド、14振動子、15…吸着部、4a…バンプ、31…光源、32…半透鏡、33…赤外線カメラ(撮像カメラ)、34…画像処理部、35…制御装置、36…演算処理部、37…比較部。
【技術分野】
【0001】
この発明は超音波振動を利用して電子部品を基板に実装する実装装置及び実装方法に関する。
【背景技術】
【0002】
たとえば、電子部品であるバンプ付きの半導体チップをポリイミド製のテープ状部材などの基板のパッドに実装する場合、上記半導体チップに押圧荷重と超音波振動を与えながら上記基板に実装する方法が知られている。つまり、半導体チップを基板に設けられたパッドに所定の圧力で加圧するとともに加熱し、さらにその半導体チップに超音波振動を付与することで、上記基板のパッドに半導体チップのバンプを固相拡散によって接合させるというものである。
【0003】
このような半導体チップの実装は実装ツールを用いて行われる。実装ツールはヒータが内蔵された超音波ヘッドを有する。この超音波ヘッドには上記半導体チップを吸着保持する吸着部が一体的に設けられている。そして、上記吸着部に半導体チップが受け渡されると、上記実装ツールは上記基板の実装位置の上方に位置決めされてから、下降方向に駆動される。それによって、上記吸着部に保持された上記半導体チップが加圧力、熱及び超音波振動によって基板に実装されるというものである。
【0004】
超音波振動を利用して半導体チップを基板に確実に実装する場合、接合に大きく寄与する超音波振動を実装ツールの超音波ヘッドから半導体チップへ効率よく伝達することが要求される。
【0005】
しかしながら、実際には実装ツールの吸着部と、この吸着部に吸着保持される半導体チップの間に異物が混入したり、上記吸着部の磨耗によって半導体チップとの間に滑りが生じたり、実装ツールに加えられる加圧力にばらつきが生じることで、超音波振動が実装ツールから半導体チップに効率よく確実に伝達されないということがある。そのような場合、半導体チップに設けられたバンプが確実に押しつぶされないため、バンプが基板のパッドに所定の強度で接合されないという、接合不良を招くことになる。
【0006】
そこで、半導体チップを基板に実装したならば、バンプが確実に押しつぶされているか否かを検査し、その検査に基づいて半導体チップの接合状態を判定するということが行われている。
【0007】
バンプが確実に押しつぶされているか否かを検査する場合、半導体チップを基板に実装したならば、その半導体チップの上面の高さを検出し、その高さによってバンプが確実に押しつぶされているか否かを判定するようにしている。
【0008】
特許文献1には、基材(基板)に被接合物(半導体チップ)を超音波振動を利用して実装した後、ホーンの先端に設けられたチップ(実装ツール)の位置(高さ)を位置変位センサによって予め規定された位置にあるか否かを判別して接合状態の良否を判定することが示されている。
【特許文献1】特開2001−105159号公報
【発明の開示】
【発明が解決しようとする課題】
【0009】
特許文献1に示されるように、半導体チップを接合した後の実装ツールの位置を判別する方法によると、半導体チップの実装を繰り返して行うことで、実装ツールの半導体チップを吸着保持する吸着部が磨耗してくるため、半導体チップの接合状態の良否に係らず、実装後に位置変位センサによって検出される実装ツールの位置が変化してくる。
【0010】
そのため、実装後における実装ツールの位置から半導体チップの接合状態の良否を判定するようにすると、実装ツールの使用に伴う磨耗に対して対応できないため、半導体チップが確実に接合されているか否かの判定が確実に行えなくなるということがある。
【0011】
しかも、実装後における実装ツールの高さは、接合状態の良否に係らず、実装前におけるバンプの高さや基板の厚さなどのばらつきによっても変化するから、実装後に実装ツールの高さを検出する方法では実際の接合状態を正確に判定することができないということもある。
【0012】
この発明は、実装ツールの高さによらず、基板と電子部品の接合状態を正確に判定できるようにすることで、実装ツールの磨耗、バンプの高さや基板の厚さのばらつきなどに対応することができるようにした電子部品の実装装置及び実装方法を提供することにある。
【課題を解決するための手段】
【0013】
この発明は、基板に電子部品を、この電子部品に設けられたバンプを介して実装する実装装置であって、
上記電子部品のバンプを上記基板に押圧しながら超音波振動を付与して上記バンプを上記基板に接合させて上記電子部品を実装する実装ツールと、
上記基板に実装された上記電子部品のバンプをこの電子部品を介して撮像する撮像手段と、
この撮像手段の撮像信号を画像処理する画像処理部と、
この画像処理部で処理された撮像信号から上記バンプのつぶれ度合を求めて上記バンプによる上記電子部品の実装状態を判定する判定手段と
を具備したことを特徴とする電子部品の実装装置にある。
【0014】
上記撮像手段は、
上記電子部品を透過する波長領域の照射光を出射する光源と、上記電子部品を透過して反射した上記照射光を撮像する撮像カメラとによって構成されていることが好ましい。
【0015】
この発明は、基板に電子部品を、この電子部品に設けられたバンプを介して実装する実装方法であって、
上記電子部品のバンプを上記基板に押圧しながら超音波振動を付与して上記バンプを上記基板に接合させて実装する工程と、
上記基板に実装された上記電子部品のバンプを撮像する工程と、
上記バンプの撮像信号から上記バンプのつぶれ度合を求める工程と、
上記バンプのつぶれ度合から上記電子部品の実装状態を判定する工程と
を具備したことを特徴とする電子部品の実装方法にある。
【0016】
上記電子部品を透過する波長領域の照射光を照射し、上記バンプで反射する照射光によって上記バンプのつぶれ度合を求めることが好ましい。
【0017】
上記バンプのつぶれ度合による面積の変化を求め、その面積の変化によって上記電子部品の実装状態を判定することが好ましい。
【発明の効果】
【0018】
この発明によれば、基板に電子部品を実装したならば、バンプのつぶれ度合を測定して電子部品の実装状態を判定するため、実装ツールの磨耗、バンプの高さや基板の厚さのばらつきなどに係らず、基板に対する電子部品の接合状態を正確に判定することができる。
【発明を実施するための最良の形態】
【0019】
以下、この発明の一実施の形態を図面を参照して説明する。
図1はフリップチップ方式の実装装置の概略的構成を示す正面図、図2は同じく側面図であって、この実装装置はリードフレームなどの基板1を所定方向に沿って搬送する搬送装置2を備えている。この搬送装置2は所定間隔で平行に配置された一対のガイドレール3を有し、このガイドレール3に沿って上記基板1が間欠的にピッチ送りされるようになっている。上記基板1はピッチ送りされるごとに、図示せぬクランパによって上記ガイドレール3に位置決め保持されるようになっている。
【0020】
上記基板1が搬送装置2によって実装位置に搬送されると、その実装位置には後述する部品供給部21(図1に示す)から供給された電子部品としての厚さが数百ミクロンの薄い半導体チップ4が実装される。この実装位置には、上記基板1の下面を支持するステージツール5が第1の駆動機構6によって水平方向であるX、Y及び上下方向であるZ方向に駆動可能に設けられている。
【0021】
上記ステージツール5の上方には、上記基板1の上面に上記半導体チップ4を実装するための実装ツール7が第2の駆動機構8によってX、Y及びZ方向に駆動可能に設けられている。
【0022】
上記実装ツール7は基部11を有し、この基部11の下面には超音波ヘッド12が設けられている。この超音波ヘッド12はホーン13を有し、このホーン13の一端には振動子14が設けられている。上記ホーン13の下面には吸着部15が設けられ、この吸着部15に上記半導体チップ4が後述するように吸着保持される。
【0023】
上記振動子14には図示しない発振器が接続されていて、この発振器からたとえば40kHzの高周波電圧が印加される。それによって、上記振動子14とともに上記ホーン13が超音波振動するようになっている。
【0024】
上記部品供給部21は図示せぬ駆動源によってX、Y方向に駆動されるウエハステージ22を有する。このウエハステージ22には多数の半導体チップ4に分割された半導体ウエハ23がウエハシート24に保持されている。
【0025】
図3に示すように、上記半導体チップ4はその一方の面に上記基板1に形成されたパッド1aに電気的に接続される複数のバンプ4a(図4(a)に示す)が形成されていて、このバンプ4aが形成された面を上にして上記ウエハシート24に保持されている。
【0026】
上記ウエハシート24に保持された半導体チップ4のうち、所定の位置の半導体チップ4は図示せぬ突き上げピンによって突き上げられる。突き上げピンによって突き上げられた半導体チップ4はピックアップ装置25を構成する吸着ノズル26によって吸着される。この吸着ノズル26は反転ユニット27に設けられた回転ヘッド28に取り付けられている。
【0027】
上記回転ヘッド28は回転駆動される。それによって、上記吸着ノズル26は、図1に実線で示す吸着面26aが下を向いた位置と、その位置から180度回転して上方を向いた位置(同図に鎖線で示す)とに位置決めされる。
【0028】
上記反転ユニット27はガイドロッド29に沿って駆動されるようになっている。このガイドロッド29は上記ウエハステージ22から上記搬送装置2の実装位置に向かって水平に架設されている。それによって、上記ウエハシート24から半導体チップ4を吸着した吸着ノズル26は、図1に鎖線で示すように半導体チップ4を吸着した吸着面26aを上にして搬送装置2の側方に駆動されて位置決めされる。この位置を受け渡し位置とする。
【0029】
吸着ノズル26が受け渡し位置に位置決めされると、同図に鎖線で示すように実装ツール7が駆動され、上記吸着ノズル26の吸着面26aに吸着された半導体チップ4を受け取る。ついで、この実装ツール7が実線で示すように基板1の上方の実装位置に位置決めされる。
【0030】
それと同時に、上記ステージツール5が上昇方向に駆動されて基板1の下面を支持する。そして、上記実装ツール7が下降方向に駆動されることで、上記基板1の上記ステージツール5によって支持された部分に、上記実装ツール7に保持された半導体チップ4が実装されることになる。
【0031】
なお、上記ステージツール5と実装ツール7のホーン13には、それぞれ図示しないヒータが設けられている。それによって、上記半導体チップ4や基板1の半導体チップ4が実装される部分を加熱しながら、上記半導体チップ4を基板1に超音波振動を与えながら熱圧着するようになっている。つまり、半導体チップ4に設けられたバンプ4aが押しつぶされて上記基板1に設けられたパッド1aに固相拡散によって接合される。
【0032】
半導体チップ4が実装された基板1は搬送装置2のガイドレール3に沿って所定のピッチで間欠的に搬送され、上記基板1には図2に示すように半導体チップ4が所定間隔で順次実装される。実装ツール7によって基板1に実装された半導体チップ4が実装位置から所定ピッチ(この実施の形態では2ピッチ)搬送されると、その半導体チップ4には近赤外線や中赤外線などの赤外線領域の波長をもつ照射光Lが照射される。照射光Lは光源31から光軸を水平にして出射され、上記基板1の上方に45度の角度で配設された半透鏡32で下方に向かって反射して半導体チップ4の上面を照射する。
【0033】
半導体チップ4を照射した照射光Lは、その波長が赤外線領域であるため、厚さが数百μmの薄い上記半導体チップ4を透過し、押しつぶされたバンプ24や基板1のパッド1aなどで反射する。反射した照射光Lは上記半透鏡32を透過して上記半透鏡32とで撮像手段を構成する撮像カメラとしての赤外線カメラ33によって受光される。
【0034】
赤外線カメラ33に入射した照射光Lは画像処理部34で二値化処理される。つまり、上記バンプ4aとバンプ4a以外の部分は、それらの材料の違いにより反射率が異なるから、上記バンプ4aで反射した照射光Lと、バンプ4a以外の部分で反射した照射光Lとの輝度に差が生じるから、その輝度の差によって二値化処理される。
【0035】
上記画像処理部34で二値化処理された撮像信号は制御装置35に出力される。この制御装置35は二値化処理された撮像信号から上記バンプ4aの面積を求める演算処理部36と、この演算処理部36で算出されたバンプ4aの面積を予め設定された基準面積と比較して上記バンプ4aのつぶれ度合を判定し、判定信号を出力する判定手段としての比較部37を有する。
【0036】
上記半導体チップ4を基板1に実装したとき、上記バンプ24の面積が20〜30%程度拡大していれば、上記バンプ24が十分に押しつぶされていると判定することができる。したがって、上記比較部37では実装前のバンプ24の面積に対して測定された実装後のバンプ24の面積がどの程度拡大されているかを比較して判定信号を出力するようになっている。
【0037】
このような構成の実装装置によれば、搬送装置2によって基板1がピッチ送りされる度に、その基板1に対して半導体チップ4が実装ツール7によって実装される。半導体チップ4は実装ツール7から付与される加圧力、熱及び超音波振動によってそのバンプ4aが押しつぶされて基板1のパッド1aに固相拡散接合される。
【0038】
図4(a)は基板1に実装される前の半導体チップ4のバンプ4aを示し、図4(b)は実装されることで押しつぶされたバンプ4aを示す。実装前のバンプ4aの面積をS1、実装後のバンプ4aの面積をS2とすると、S1<S2であって、上述したようにS2がS1の1.2〜1.3倍程度であれば、上記バンプ4aが十分に押しつぶされて半導体チップ4が実装されているということになる。
【0039】
実装位置で基板1に実装された半導体チップ4が赤外線カメラ33の上方に搬送されると、その半導体チップ4に光源31から出射されて半透鏡32で反射した赤外線領域の波長の照射光Lが照射される。
【0040】
照射光Lは半導体チップ4の厚さが数百ミクロンと非常に薄いため、この半導体チップ4を透過してバンプ4aや基板1のパッド1aなどで反射し、上記半透鏡32を通って上記赤外線カメラ33に入射する。
【0041】
赤外線カメラ33に入射した照射光Lは画像処理部34で二値化処理されてから、制御装置35の演算処理部36で押しつぶされたバンプ4aの面積が求められた後、比較部37で基準面積と比較されて上記バンプ4aのつぶれ度合が判定される。
【0042】
つまり、半導体チップ4を基板1に実装したならば、実装後のバンプ4aのつぶれ度合に応じた面積の変化から半導体チップ4が基板1に確実に実装されているか否かを判定するようにした。
【0043】
そのため、従来のように実装ツール7の使用に伴う吸着部15の磨耗、或いは基板1や半導体チップ4の厚さのばらつきなどに影響を受けることなく、基板1に対する半導体チップ4の実装状態を確実かつ精密に判定することが可能となるから、不良品の発生を未然に防止することができる。
【0044】
上記一実施の形態では基板に実装された半導体チップのバンプのつぶれ度合を撮像するために赤外線領域の照射光を上記半導体チップに照射するようにしたが、照射光としては赤外線領域の光だけに限られず、上記半導体チップに対して光学的に透明な他の波長の光、たとえばレーザ光やX線などを用いるようにしてもよい。
【0045】
また、上述した実施の形態では孔が根から照射された照射光がバンプやパッドで反射した反射光をカメラで撮像するようにしたが、半導体チップと基板を透過した透過光によってバンプの押しつぶされた量を測定するようにしてもよい。
【0046】
その場合、バンプが押しつぶされると、その面積が増大するから、測定される透過光は押しつぶされたバンプが適切である場合は少なくなる。したがって、透過光量の割合を測定すれば、バンプが適切に押しつぶされているか否かを判定することができる。
【図面の簡単な説明】
【0047】
【図1】この発明の一実施の形態の実装装置の概略的構成を示す正面図。
【図2】同じく側面図。
【図3】吸着部に吸着保持された半導体チップの拡大図。
【図4】(a)は実装前のバンプの大きさを説明するための半導体チップの平面図、(b)は実装後のバンプの大きさを説明するための半導体チップの平面図。
【符号の説明】
【0048】
1…基板、4…半導体チップ(電子部品)、7…実装ツール、12…超音波ヘッド、14振動子、15…吸着部、4a…バンプ、31…光源、32…半透鏡、33…赤外線カメラ(撮像カメラ)、34…画像処理部、35…制御装置、36…演算処理部、37…比較部。
【特許請求の範囲】
【請求項1】
基板に電子部品を、この電子部品に設けられたバンプを介して実装する実装装置であって、
上記電子部品のバンプを上記基板に押圧しながら超音波振動を付与して上記バンプを上記基板に接合させて上記電子部品を実装する実装ツールと、
上記基板に実装された上記電子部品のバンプをこの電子部品を介して撮像する撮像手段と、
この撮像手段の撮像信号を画像処理する画像処理部と、
この画像処理部で処理された撮像信号から上記バンプのつぶれ度合を求めて上記バンプによる上記電子部品の実装状態を判定する判定手段と
を具備したことを特徴とする電子部品の実装装置。
【請求項2】
上記撮像手段は、
上記電子部品を透過する波長領域の照射光を出射する光源と、上記電子部品を透過して反射した上記照射光を撮像する撮像カメラとによって構成されていることを特徴とする請求項1記載の電子部品の実装装置。
【請求項3】
基板に電子部品を、この電子部品に設けられたバンプを介して実装する実装方法であって、
上記電子部品のバンプを上記基板に押圧しながら超音波振動を付与して上記バンプを上記基板に接合させて実装する工程と、
上記基板に実装された上記電子部品のバンプを撮像する工程と、
上記バンプの撮像信号から上記バンプのつぶれ度合を求める工程と、
上記バンプのつぶれ度合から上記電子部品の実装状態を判定する工程と
を具備したことを特徴とする電子部品の実装方法。
【請求項4】
上記電子部品を透過する波長領域の照射光を照射し、上記バンプで反射する照射光によって上記バンプのつぶれ度合を求めることを特徴とする請求項3記載の電子部品の実装方法。
【請求項5】
上記バンプのつぶれ度合による面積の変化を求め、その面積の変化によって上記電子部品の実装状態を判定することを特徴とする請求項3又は請求項4に記載の電子部品の実装方法。
【請求項1】
基板に電子部品を、この電子部品に設けられたバンプを介して実装する実装装置であって、
上記電子部品のバンプを上記基板に押圧しながら超音波振動を付与して上記バンプを上記基板に接合させて上記電子部品を実装する実装ツールと、
上記基板に実装された上記電子部品のバンプをこの電子部品を介して撮像する撮像手段と、
この撮像手段の撮像信号を画像処理する画像処理部と、
この画像処理部で処理された撮像信号から上記バンプのつぶれ度合を求めて上記バンプによる上記電子部品の実装状態を判定する判定手段と
を具備したことを特徴とする電子部品の実装装置。
【請求項2】
上記撮像手段は、
上記電子部品を透過する波長領域の照射光を出射する光源と、上記電子部品を透過して反射した上記照射光を撮像する撮像カメラとによって構成されていることを特徴とする請求項1記載の電子部品の実装装置。
【請求項3】
基板に電子部品を、この電子部品に設けられたバンプを介して実装する実装方法であって、
上記電子部品のバンプを上記基板に押圧しながら超音波振動を付与して上記バンプを上記基板に接合させて実装する工程と、
上記基板に実装された上記電子部品のバンプを撮像する工程と、
上記バンプの撮像信号から上記バンプのつぶれ度合を求める工程と、
上記バンプのつぶれ度合から上記電子部品の実装状態を判定する工程と
を具備したことを特徴とする電子部品の実装方法。
【請求項4】
上記電子部品を透過する波長領域の照射光を照射し、上記バンプで反射する照射光によって上記バンプのつぶれ度合を求めることを特徴とする請求項3記載の電子部品の実装方法。
【請求項5】
上記バンプのつぶれ度合による面積の変化を求め、その面積の変化によって上記電子部品の実装状態を判定することを特徴とする請求項3又は請求項4に記載の電子部品の実装方法。
【図1】


【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公開番号】特開2008−227017(P2008−227017A)
【公開日】平成20年9月25日(2008.9.25)
【国際特許分類】
【出願番号】特願2007−60922(P2007−60922)
【出願日】平成19年3月9日(2007.3.9)
【出願人】(000002428)芝浦メカトロニクス株式会社 (907)
【Fターム(参考)】
【公開日】平成20年9月25日(2008.9.25)
【国際特許分類】
【出願日】平成19年3月9日(2007.3.9)
【出願人】(000002428)芝浦メカトロニクス株式会社 (907)
【Fターム(参考)】
[ Back to top ]