
電子顕微鏡観察試料の前処理用薄膜コーティング装置
【課題】試料表面の帯電現象を防止する為に複雑な形状を有する該試料のあらゆる面及び孔の内部にも出来るだけ均一に導電性薄膜微粒子を付着(コーティング)させる為の前処理装置。
【解決手段】スパッタされたターゲット2の原子がステージ11上に載置された試料10に付着することにより試料表面上に導電性薄膜が形成される。その際、該試料の表面ないしは側壁面上に存在する微細な突起の周囲や孔の内壁に出来るだけ均一な導電性薄膜を一様に形成せしめるべく該試料を載置するステージ11を制御器7を用いて該ステージ面の中心から互いに離間した3つの保持位置の下部に取り付けられている3つのアクチュエータ12を通して上下運動させることにより、該ステージ面上の試料を回転させることなく360度方位全域で該試料を一定傾斜状態のまま保持することで該ステージ上に載置された非導電性試料の表面ないしは側壁面に一様にコーティングが可能となる。
【解決手段】スパッタされたターゲット2の原子がステージ11上に載置された試料10に付着することにより試料表面上に導電性薄膜が形成される。その際、該試料の表面ないしは側壁面上に存在する微細な突起の周囲や孔の内壁に出来るだけ均一な導電性薄膜を一様に形成せしめるべく該試料を載置するステージ11を制御器7を用いて該ステージ面の中心から互いに離間した3つの保持位置の下部に取り付けられている3つのアクチュエータ12を通して上下運動させることにより、該ステージ面上の試料を回転させることなく360度方位全域で該試料を一定傾斜状態のまま保持することで該ステージ上に載置された非導電性試料の表面ないしは側壁面に一様にコーティングが可能となる。
【発明の詳細な説明】
【技術分野】
本発明は走査型電子顕微鏡観察用もしくは電子線マイクロ分析用(マイクロ分析)の非導電性試料に対して、観察中もしくは分析中の試料表面の帯電を防止するために使用される前処理方法及び前処理装置に関する。
【背景技術】
試料表面に細く絞った電子線を走査して照射し、二次電子を検出して表面の凹凸を観察する走査型電子顕微鏡(SEM)は、非常に広範囲の試料対象に対して表面の微細な構造を精密に調べることができるために新規材料の開発や材料の新規応用探索、あるいは工業材料/生物系材料の物性と微細構造との関係等の解析にあたって非常に有効な評価手段となっている。またこれと同様に、試料表面に細く絞った電子線を走査して照射し、試料から励起されるX線を分光して試料の組成を調べるマイクロ分析法では、微少領域の組成を測定することができるために、新規材料や新規デバイスを開発等するにあたって非常に有効な評価手段とされている。
例えば、上記した走査型電子顕微鏡(SEM)を用いた観察において、非導電性(絶縁性)試料を観察する場合には、観察用プローブとしての電子線照射によって試料が帯電し観察が充分出来ないことを防ぐために、あらかじめ該試料表面に導電性を付与する薄膜をコーティングして該試料に導電性を付与するための前処理を行う必要がある。ところで、かかる試料には、例えば菌などの有機生物(病原菌や細胞等)等の観察を通して該表面に存在する複雑な形状かつ微細な孔の内部を探索しようとした場合、これらの複雑な形状のあらゆる面及び微細な孔の内部にも薄膜微粒子を付着させる必要がある。さもないと、これら複雑な形状の一部あるいは微細な孔周辺において該部分の帯電がSEM観察等の測定中に誘起され、該試料の表面構造の正確な観察を不可能にする。
従来より、これらSEM観察のための導電性薄膜コーティングを施す手段として一般にグロー放電やイオンビームを利用したスパッタ装置、加熱蒸散を利用した真空蒸着装置などが用いられている。しかしながら、これらの装置は発生した導電性微粒子の飛来方向に対して、試料を載置したステージを回転又は傾斜(チルト)させたりして複雑な形状を有する試料の全体に導電性薄膜コーティングする機能を有するとされているが、そのほとんどは試料の特定の側面あるいは内面の一部にしかコーティングを施すことができず、複雑な形状を有した試料に特に必要とされる該試料の360度周囲側面及び微細な孔の内部にも薄膜微粒子を飛来付着させるに至っていない。
【発明の開示】
【発明が可決しようとする課題】
本発明は、複雑な形状を有する非導電性試料のあらゆる面及び微細な孔の内部にも薄膜微粒子を付着させるための前処理方法及び前処理装置を提供することを課題とする。
【課題を解決するための手段】
本発明は、走査型電子顕微鏡観察用もしくは電子線マイクロ分析用非導電性試料表面に導電性薄膜コーティングを施すための前処理方法であって、真空チャンバー(1)内で導電性微粒子を発生する装置の該チャンバー内に配置されたステージ(11)上に載置された試料(10)表面に導電性微粒子を飛来付着させるためのステージ(11)を有し、該ステージを、試料の載置されるステージ面の重心点から互いに離間した3つの保持位置で各々の下部に取り付けられた3つのアクチュエータ(12)により保持させると共に該アクチュエータ各々を上下方向に互いに連動して変化させることにより、該ステージ(11)面を任意選択した一定の傾斜状態のまま保持することで該ステージ(11)に載置された非導電性試料(10)に該角度方向から導電性微粒子を付着させて該試料に導電性を付与するようにした前処理方法及び装置である。また本発明は、3つのアクチュエータ(12)の各々は、該ステージ(11)の保持位置において、ステージを任意の角度で軸支して保持する接続ジョイント(16)で保持するようにした非導電性試料の前処理方法及び装置である。更に本発明は、3つのアクチュエータ(12)は、ステージの重心点の1点を中心とする円弧に内接する正三角形の頂点位置に配置されており、互いに連動して上下動させることにより、ステージを任意の高さに上下動させ、X方向及びこれと直交するY方向の任意の傾斜位置に保持するようにした非導電性試料の前処理方法及び装置であり、更に3つのアクチュエータ(12)は、互いに位相が1/3周期ずらせて同一動作で順次所定距離上下駆動させ、ステージ面を360度方位で、所定の傾斜角を順次形成するように動作させ、これによりステージに載置された非導電性試料の任意の側面及び内壁面を含む面を導電性微粒子飛来方向に指向させるようにした非導電性試料の前処理方法及び前処理装置である。更に、本発明は上記記載の非導電性試料3つのアクチュエータ(12)の各々が、回転・直動変換器(14)を介して各々パルスモータ(13)に接続されており、該パルスモータは相互に連動して上記3つのアクチュエータ(12)の上方及び下方への直線運動を行わせるように正転及び逆転駆動制御されるようにした非導電性試料の前処理方法及び前処理装置である。
【発明を実施するための最良の形態】
以下、本発明を非導電性試料の前処理方法及び前処理装置の実施例を添付図面に従って詳細に説明する。
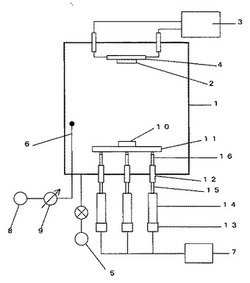
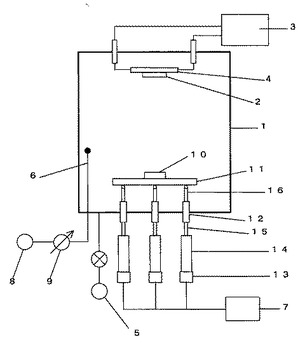
図1は、本発明の非導電性試料の前処理装置の一例を示す。
図において、1はグロー放電やイオンビームを利用したスパッタ装置、真空チャンバーを示し、これは排気装置(5)により内部が真空状態となるように排気されている。2は蒸発源(ターゲット)であり、例えば、白金、金、パラジウム、タングステン等の導電性材料により構成されており、当該ターゲットに例えば、プラズマ放電を行わせる電圧供給電源(3)からアノード電極(4)を介して該ターゲットに電圧を印加し該ターゲットをプラズマスパッタせしめ発生した該ターゲットの微粒子をチャンバー内で飛散させる。11は、上記微粒子の飛来方向に非導電性試料10を向けて載置するためのステージである。非導電性試料10は、例えば菌などの有機生物(病原菌や細胞等)を含むあらゆる非導電性試料が用いられ、これらは絶縁性を呈すると共に表面に存在する複雑な形状、微細な孔が存在するものも含まれる。ステージ11は、一例においては円板状の載置台であり、これに上記導電性微粒子を指向させるための電圧等が印加されても良く、その表面に前記非導電性試料10を載置し、上記ターゲット2から発せられた導電性微粒子を非導電性試料表面に付着させる。このステージ11は、試料10を載置したステージ面の重心点から、互いに離間する3つの保持位置で3つのアクチュエータ12によって保持されると共に、各々の保持位置において、図示しない制御装置により正回転・逆回転を可能とするように制御されたパルスモータ13、回転・直動変換器14及び上下直動軸15により、各々の保持位置においてステージ11が上下動可能に保持されている。このアクチュエータ12は、前記した真空チャンバー1外に配置されており、その先端位置においてチャンバー1内のステージ11を各々の保持位置において互いに連動して相対的に上下動させることにより、ステージ11全体を上下動させ、あるいはステージ面を任意の傾斜位置となるように傾斜させ、これによりステージ11に載置された非導電性試料10に任意の角度から導電性微粒子を付着させて、該非導電性試料10表面に導電性微粒子を付着させる。
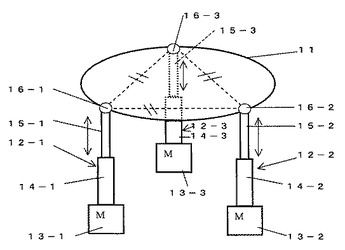
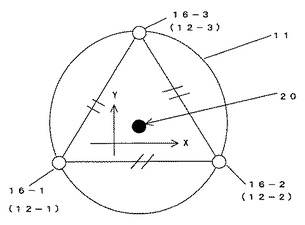
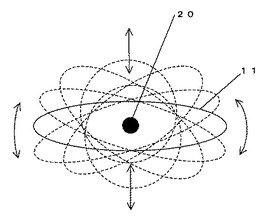
図2及び図3は、図1に示す構成のうち、ステージ11及びアクチュエータ12のみを選択的に記載し、その動作を説明するための図面であり、図2はその概略斜視図を、図3はその概略上面図を示している。
図2及び図3において、ステージ11は円板状のものが用いられ、その中央20を中心とする円周、例えば円板の端面に内接する正三角形の頂点が各々アクチュエータ12で保持されるように構成される。アクチュエータ12は、左方に記載されているアクチュエータ12−1から反時計方向に順に12−2及び12−3となるように、各々サフィックスを付して示しており、各アクチュエータ12を構成するパルスモータ13、回転・直動変換器14及び上下直動軸15にも同様にサフィックスを付して示しているが、特別な説明をする場合を除きこれらのサフィックスについては説明を省略する。16は、各アクチュエータ12とステージ11の保持位置に形成されている接続ジョイントであり、後述するようにステージ11が任意の傾斜位置となるように傾斜してもアクチュエータ12はステージ11をその保持位置において保持可能とするようにステージ11を一点で軸支し、枢着可能な機構を構成している。
上記の構成において、ステージ11を上下に移動させる場合には、全てのアクチュエータ12−1乃至12−3に対し、パルスモータ13を同期して正回転あるいは逆回転し、上下直動軸15を同期して上下動させればよい。
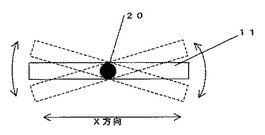
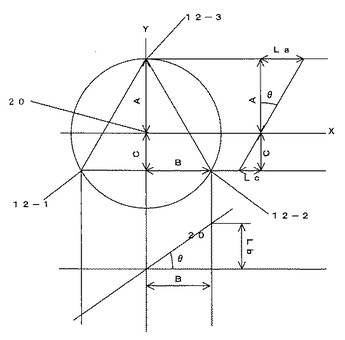
また、図4に示すごとくステージ11を中央20に対してX方向に傾斜させるには、図5に示すように、アクチュエータ12−3を所定の高さ位置に保持した状態とし、残りのアクチュエータ12−1及び12−2を、アクチュエータ12−3と中心20を結ぶ直線を延長した位置と各頂点の距離Bに相当する上下方向位置±Lbとなるまで互いに異なる方向に上下させればよい。アクチュエータ12−1及び12−2を、例えば+Lb及び−Lbとなるように互いに同期して上下動させる動作を図6に示す。
図6に示すように、1つのアクチュエータ12−3を固定し、これに対して他のアクチュエータ12−1及び12−2を互いに逆動作となるように同期して相対的に+Lb及び−Lbとなるまで上下運動を繰り返すことにより、ステージ11をX方向に繰り返し傾斜揺動を行わせることができる。このとき、アクチュエータ12−1及び12−2の移動量は、以下の式(1)で表すことができ、±Lb=±B×tanθ・・式(1)、更に、θ=(移動角度/180)×π・・式(2)となるから、ステージ11におけるアクチュエータの保持位置を適当に選択することにより、ステージ11をX方向に±40度程度傾斜させることができ、これにより飛来する導電性粒子に対してかかる角度範囲にまで非導電性試料を傾斜する動作を繰り返すことが可能となるから、非導電性試料に導電性粒子をX方向にかかる角度位置の表面にまで付着することが可能となる。
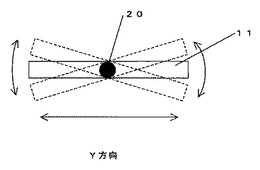
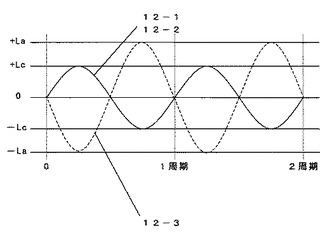
次に、図7に示すごとくステージ11を中央20に対してY方向に傾斜させるには、図5に示すように、アクチュエータ12−1及び12−2を同期して同じ方向となるように上下移動量±Lc移動させ、かつアクチュエータ12−3を上記アクチュエータ12−1及び12−2と同期しこれとは逆方向に上下方向距離±Laで上下させればよい。この動作を図8に示す。図8に示すように、アクチュエータ12−1及び12−2を同期して±Lcで上下移動させると共に、アクチュエータ12−3を逆動作となるように同期して±Laとなるまで上下運動を繰り返すことにより、ステージ11をY方向に繰り返し傾斜揺動を行わせることができる。このとき、アクチュエータ12−1、12−2の移動量±Lc及びアクチュエータ12−3の移動量±Laは、以下の式(3)及び(4)で表すことができ、
±La=±A×tanθ・・式(3)、
±Lc=±C×tanθ・・式(4)、
更に、上記と同様にθ=(移動角度/180)×π・・式(2)であるから、ステージ11におけるアクチュエータの保持位置を適当に選択することにより、ステージ11をY方向に±40度程度傾斜させることができ、これにより飛来する導電性粒子に対してかかる角度位置にまで非導電性試料を傾斜する動作を繰り返すことが可能となるから、非導電性試料に導電性粒子をX方向にかかる角度位置の表面にまで付着することが可能となる。
ここで、ステージ11をY方向に傾斜を行わせる際の動作時には、同時間後にアクチュエータ12−1及び12−2と、アクチュエータ12−3では異なった移動量の上下移動制御を行う必要がある。従って、目的動作量Lxを達成する速度をアクチュエータ12−1及び12−2と、アクチュエータ12−3との間で異ならせて動作させるように制御されるが、そのときの速度比は移動量La及びLcに比例するので、各パルスモータの回転速度をこの割合で変化させることにより、同一時間経過後に目的傾斜角への動作を行わせることは容易に制御可能である。更に、上記X方向、Y方向を含む全ての面方位(360度の面方位)で特定の傾斜角(例えば、±40度の傾斜角)となるように、ステージ11を繰り返し傾斜揺動させ、これに載置された試料に飛来する導電性粒子を上記傾斜角度にまで非導電性試料を傾斜する動作を繰り返し、飛来する導電性粒子と対向する試料の全ての任意の側面及び内壁面を含む面に均一に導電性粒子を付着させるように、ステージ11をローテーション動作させるための動作について、図9及び図10に基づいて説明する。
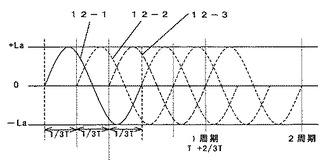
図9は、ステージ11を上記X方向、Y方向を含む全ての面方位(360度の面方位)で特定の傾斜角(例えば、±40度の傾斜角)となるように、繰り返し傾斜揺動させるローテーション動作を示している。
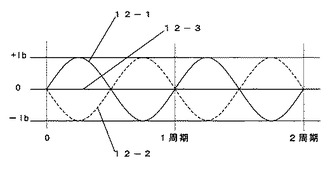
この動作を図5及び図10を参照して説明する。図5において、アクチュエータ12−1、12−2及び12−3を半径Aの移動量Laまで、各アクチュエータ12の位相を1/3をずらして同方向に移動させるようにする。(各アクチュエータ12は、サイン運動あるいはコサイン運動されることになる。)図10に示すように、まずアクチュエータ12−1のサイン運動を開始し、これを移動距離±Laの間を上下させる。このアクチュエータ12−1のサイン運動の1/3周期完了時に、アクチュエータ12−2に対して同じサイン運動を開始し、同様にこのアクチュエータ12−2のサイン運動の1/3周期完了時にアクチュエータ12−3に対して同じサイン運動を開始する。このようにして各アクチュエータ12を互いに1/3周期すらして連動させて移動量±La間を上下移動させると、1周期においてステージ11は上記X方向、Y方向を含む全ての面方位(360度の面方位)で順次傾斜の方位が変化して、特定の傾斜角(例えば、±40度の傾斜角)となるように、傾斜されることとなる。以降同様にして、必要なローテーション回数となるまで各アクチュエータ12のサイン動作が繰り返されると、ステージ11は上記X方向、Y方向を含む全ての面方位(360度の面方位)で特定の傾斜角(例えば、±40度の傾斜角)となるように、繰り返し傾斜揺動されることとなる。
このようにして、ステージ11上に載置された試料は、飛来する導電性粒子を上記角度範囲にまで非導電性試料を360度の面方位で傾斜する動作を繰り返され、飛来する導電性粒子と対向する試料の全ての任意の側面及び内壁面を含む面に導電性粒子が付着されることとなる。該非導電性試料の飛来する導電性粒子と対向する試料の全ての任意の側面及び内壁面を含む面に均一に導電性粒子を付着させるためには、飛来する導電性粒子と対向する試料の全ての任意の側面及び内壁面を含む面が、均一の時間で飛来する導電性粒子と対向する必要がある。そこで、導電性粒子の付着の終了時には、図10の右端に示すように、アクチュエータ12−1停止後1/3周期後にアクチュエータ12−2を停止させ、更にその停止後1/3周期後にアクチュエータ12−3を停止すると同時に、スパッタリング装置あるいは真空蒸着装置における導電性微粒子の発生を停止すればよい。
図5に戻って、ステージ11の傾きθに対する各アクチュエータの移動量は、前記した式(3)と同様となる。
±La=±A×tanθ・・式(3)
また、同様にθ=(移動角度/180)×π・・式(2)であるから、ステージ11におけるアクチュエータの保持位置を適当に選択することにより、ステージ11をX方向、Y方向を含む全ての面方位(360度の面方位)に±40度程度傾斜させることができ、これにより飛来する導電性粒子に対してかかる角度範囲にまで非導電性試料を傾斜する動作を繰り返すことが可能となるから、非導電性試料に導電性粒子をすべての面方位(360度の面方位)において、かかる角度位置の表面にまで均一に付着することが可能となる。このためのステージ11のローテーションの総時間Tsumは、各アクチュエータ12の1周期の時間(s)をTおよびステージのローテーションの回数をNとすると、式(5)として表される。
Tsum=[T+(2/3×T)×N]・・式(5)
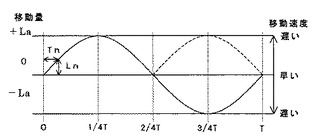
以上説明した図6、図8及び図10の実施例における各アクチュエータ12の移動速度について、図11を用いてその制御について説明する。
図11において、各アクチュエータ12の移動速度は、最頂点(例えば、±La)で最低速、移動量0位置で最高速を呈するサイン動作に比例した速度で上下に移動する。各アクチュエータ12の動きをサインカーブに従った速度で動作させたときの上下移動について図11で示している。図11において、(図5参照)ステージ11の半径をA、傾斜の最大角をθとしたときの移動量をLaとすると、上記したように、
±La=±A×tanθ・・式(3)
となり、このときの移動速度は最少(0)となる。
このときは、アクチュエータ12の上下動作を逆転するタイミングとなり、同時にパルスモータ13を逆転するタイミングとなるから、この制御は極めて容易に行われる。また、1周期の時間をTとして開始からTn時間までのアクチュエータ12の移動量をLnとすると、式(6)の関係が成り立つ。
Ln=A×sin[(Tn/T)×2π]・・式(6)
従って、開始からTn時間までのアクチュエータ12の移動量はLnとなり、更にLnから次の移動量も上記式(6)によって導くことができる。従って、パルスモータ13を式(6)に基づいて制御すれば、各アクチュエータ12をサイン動作に追従した時間動作で容易に上下動制御することができる。
以上の実施例においては、ステージ11はその中心部20を中心とした円板が用いられ、更にこの円板の端面(円弧位置)で当該円弧に内接する正三角形の頂点位置に3つのアクチュエータ12が設けられた例について説明したが、必ずしもこれに限られるものでなくてもよく、該ステージは、試料の載置されるステージ面の略中心から互いに離間した3つの保持位置で保持されると共に、各々の保持位置においてステージを上下動させる3つのアクチュエータによって上下動可能に保持されていればよく、更に3つのアクチュエータは互いの上下相対位置を連動して変化させることにより、ステージ面を任意の傾斜位置を形成させればよく、例えば、ステージ11は試料載置面が四角形状のものでもよく、また3つのアクチュエータ12は、必ずしも、ステージ11中央を中心とする円弧に内接する正三角形の頂点位置に設けられなくてもよい。
図12と図13に本発明の前処理装置によって、一般的に使用されている濾紙に導電性粒子を付着させた試料をJEOL製SEM装置で撮影したサンプル写真を示す。
図12は傾斜角0度で保持したままクローム微粒子の薄膜コーディング処理した該試料のSEM観察写真であり、図13は本発明の前処理装置で傾斜角30度でオールラウンド捩れ運動させ作成した上記薄膜コーティング該試料のSEM観察写真である。
前者のサンプル写真(図12)においては、濾紙の繊維の周辺部において試料の帯電に起因する像障害(白色像)が発生しており、その部分の観察が極めて困難となっているが、後者のサンプル写真(図13)から明らかなごとく、濾紙の繊維の周辺部や凹地及び微細な孔の内面の全方位に渡って試料の帯電に起因する像障害の発生が全くない鮮明な像が観察されている。
【産業上の利用可能性】
本発明によれば、走査型電子顕微鏡観察用もしくは電子線マイクロ分析用の、例えば菌などの有機生物(病原菌や細胞等)を代表として、表面に存在する複雑な形状、微細な孔の内部が存在する非導電性試料に対しても複雑な形状のあらゆる面及び微細な孔の内部にも薄膜微粒子を付着させることができ、観察中もしくは分析中の試料表面の帯電現象に起因する像障害の発生なく、試料の表面構造の正確な観察を可能にする。
半導体デバイス製造装置分野において、素材表面上に気相成長薄膜を作成する工程で素材を載置させるステージにも本発明の機構を用いることができる。更に、表面異物欠陥検査分野において、該装置の試料載置ステージ等にも本発明の機構を利用する事ができる。
【図面の簡単な説明】
【図1】は、本発明の一実施例を示す正面図。
【図2】は、本発明に用いられるステージ及びアクチュエータを示す斜視図。
【図3】は、本発明に用いられるステージ及びアクチュエータを示す上面図。
【図4】は、本発明に基づきステージをX方向に傾斜させる動作を示す図。
【図5】は、本発明に用いられるステージ及びアクチュエータの配置を示す上面図。
【図6】は、本発明に基づきステージをX方向に傾斜させる動作を示す図。
【図7】は、本発明に基づきステージをY方向に傾斜させる動作を示す図。
【図8】は、本発明に基づきステージをY方向に傾斜させる動作を示す図。
【図9】は、本発明に基づきステージを360度の面方位に傾斜させる動作を示す図。
【図10】は、本発明に基づきステージを360度の面方位に傾斜させる動作を示す図。
【図11】は、本発明のアクチュエータの動作速度を示す図。
【図12】は、非導電性試料の濾紙を前処理におけるチルト角零度のステージに置いて白金コーティングを施した後の500倍SEM観察写真。
【図13】は、本発明に基づくチルト角30度でステージを動作させながら白金コーティングされた濾紙の500倍SEM観察写真。
【符号の説明】
1: 真空チャンバー
2: プラズマスパッタ用ターゲット
3: プラズマ放電用供給電源
4: アノード電極
5: 排気ポンプ
6: ガス導入管
7: 制御器
8: 導入ガス供給源
9: 導入ガス量調整弁
10: 試料
11: ステージ(カソード電極)
12: アクチュエータ
13: パルスモータ
14: 回転・直動変換器
15: 上下直動軸
16: 接続ジョイント
【技術分野】
本発明は走査型電子顕微鏡観察用もしくは電子線マイクロ分析用(マイクロ分析)の非導電性試料に対して、観察中もしくは分析中の試料表面の帯電を防止するために使用される前処理方法及び前処理装置に関する。
【背景技術】
試料表面に細く絞った電子線を走査して照射し、二次電子を検出して表面の凹凸を観察する走査型電子顕微鏡(SEM)は、非常に広範囲の試料対象に対して表面の微細な構造を精密に調べることができるために新規材料の開発や材料の新規応用探索、あるいは工業材料/生物系材料の物性と微細構造との関係等の解析にあたって非常に有効な評価手段となっている。またこれと同様に、試料表面に細く絞った電子線を走査して照射し、試料から励起されるX線を分光して試料の組成を調べるマイクロ分析法では、微少領域の組成を測定することができるために、新規材料や新規デバイスを開発等するにあたって非常に有効な評価手段とされている。
例えば、上記した走査型電子顕微鏡(SEM)を用いた観察において、非導電性(絶縁性)試料を観察する場合には、観察用プローブとしての電子線照射によって試料が帯電し観察が充分出来ないことを防ぐために、あらかじめ該試料表面に導電性を付与する薄膜をコーティングして該試料に導電性を付与するための前処理を行う必要がある。ところで、かかる試料には、例えば菌などの有機生物(病原菌や細胞等)等の観察を通して該表面に存在する複雑な形状かつ微細な孔の内部を探索しようとした場合、これらの複雑な形状のあらゆる面及び微細な孔の内部にも薄膜微粒子を付着させる必要がある。さもないと、これら複雑な形状の一部あるいは微細な孔周辺において該部分の帯電がSEM観察等の測定中に誘起され、該試料の表面構造の正確な観察を不可能にする。
従来より、これらSEM観察のための導電性薄膜コーティングを施す手段として一般にグロー放電やイオンビームを利用したスパッタ装置、加熱蒸散を利用した真空蒸着装置などが用いられている。しかしながら、これらの装置は発生した導電性微粒子の飛来方向に対して、試料を載置したステージを回転又は傾斜(チルト)させたりして複雑な形状を有する試料の全体に導電性薄膜コーティングする機能を有するとされているが、そのほとんどは試料の特定の側面あるいは内面の一部にしかコーティングを施すことができず、複雑な形状を有した試料に特に必要とされる該試料の360度周囲側面及び微細な孔の内部にも薄膜微粒子を飛来付着させるに至っていない。
【発明の開示】
【発明が可決しようとする課題】
本発明は、複雑な形状を有する非導電性試料のあらゆる面及び微細な孔の内部にも薄膜微粒子を付着させるための前処理方法及び前処理装置を提供することを課題とする。
【課題を解決するための手段】
本発明は、走査型電子顕微鏡観察用もしくは電子線マイクロ分析用非導電性試料表面に導電性薄膜コーティングを施すための前処理方法であって、真空チャンバー(1)内で導電性微粒子を発生する装置の該チャンバー内に配置されたステージ(11)上に載置された試料(10)表面に導電性微粒子を飛来付着させるためのステージ(11)を有し、該ステージを、試料の載置されるステージ面の重心点から互いに離間した3つの保持位置で各々の下部に取り付けられた3つのアクチュエータ(12)により保持させると共に該アクチュエータ各々を上下方向に互いに連動して変化させることにより、該ステージ(11)面を任意選択した一定の傾斜状態のまま保持することで該ステージ(11)に載置された非導電性試料(10)に該角度方向から導電性微粒子を付着させて該試料に導電性を付与するようにした前処理方法及び装置である。また本発明は、3つのアクチュエータ(12)の各々は、該ステージ(11)の保持位置において、ステージを任意の角度で軸支して保持する接続ジョイント(16)で保持するようにした非導電性試料の前処理方法及び装置である。更に本発明は、3つのアクチュエータ(12)は、ステージの重心点の1点を中心とする円弧に内接する正三角形の頂点位置に配置されており、互いに連動して上下動させることにより、ステージを任意の高さに上下動させ、X方向及びこれと直交するY方向の任意の傾斜位置に保持するようにした非導電性試料の前処理方法及び装置であり、更に3つのアクチュエータ(12)は、互いに位相が1/3周期ずらせて同一動作で順次所定距離上下駆動させ、ステージ面を360度方位で、所定の傾斜角を順次形成するように動作させ、これによりステージに載置された非導電性試料の任意の側面及び内壁面を含む面を導電性微粒子飛来方向に指向させるようにした非導電性試料の前処理方法及び前処理装置である。更に、本発明は上記記載の非導電性試料3つのアクチュエータ(12)の各々が、回転・直動変換器(14)を介して各々パルスモータ(13)に接続されており、該パルスモータは相互に連動して上記3つのアクチュエータ(12)の上方及び下方への直線運動を行わせるように正転及び逆転駆動制御されるようにした非導電性試料の前処理方法及び前処理装置である。
【発明を実施するための最良の形態】
以下、本発明を非導電性試料の前処理方法及び前処理装置の実施例を添付図面に従って詳細に説明する。
図1は、本発明の非導電性試料の前処理装置の一例を示す。
図において、1はグロー放電やイオンビームを利用したスパッタ装置、真空チャンバーを示し、これは排気装置(5)により内部が真空状態となるように排気されている。2は蒸発源(ターゲット)であり、例えば、白金、金、パラジウム、タングステン等の導電性材料により構成されており、当該ターゲットに例えば、プラズマ放電を行わせる電圧供給電源(3)からアノード電極(4)を介して該ターゲットに電圧を印加し該ターゲットをプラズマスパッタせしめ発生した該ターゲットの微粒子をチャンバー内で飛散させる。11は、上記微粒子の飛来方向に非導電性試料10を向けて載置するためのステージである。非導電性試料10は、例えば菌などの有機生物(病原菌や細胞等)を含むあらゆる非導電性試料が用いられ、これらは絶縁性を呈すると共に表面に存在する複雑な形状、微細な孔が存在するものも含まれる。ステージ11は、一例においては円板状の載置台であり、これに上記導電性微粒子を指向させるための電圧等が印加されても良く、その表面に前記非導電性試料10を載置し、上記ターゲット2から発せられた導電性微粒子を非導電性試料表面に付着させる。このステージ11は、試料10を載置したステージ面の重心点から、互いに離間する3つの保持位置で3つのアクチュエータ12によって保持されると共に、各々の保持位置において、図示しない制御装置により正回転・逆回転を可能とするように制御されたパルスモータ13、回転・直動変換器14及び上下直動軸15により、各々の保持位置においてステージ11が上下動可能に保持されている。このアクチュエータ12は、前記した真空チャンバー1外に配置されており、その先端位置においてチャンバー1内のステージ11を各々の保持位置において互いに連動して相対的に上下動させることにより、ステージ11全体を上下動させ、あるいはステージ面を任意の傾斜位置となるように傾斜させ、これによりステージ11に載置された非導電性試料10に任意の角度から導電性微粒子を付着させて、該非導電性試料10表面に導電性微粒子を付着させる。
図2及び図3は、図1に示す構成のうち、ステージ11及びアクチュエータ12のみを選択的に記載し、その動作を説明するための図面であり、図2はその概略斜視図を、図3はその概略上面図を示している。
図2及び図3において、ステージ11は円板状のものが用いられ、その中央20を中心とする円周、例えば円板の端面に内接する正三角形の頂点が各々アクチュエータ12で保持されるように構成される。アクチュエータ12は、左方に記載されているアクチュエータ12−1から反時計方向に順に12−2及び12−3となるように、各々サフィックスを付して示しており、各アクチュエータ12を構成するパルスモータ13、回転・直動変換器14及び上下直動軸15にも同様にサフィックスを付して示しているが、特別な説明をする場合を除きこれらのサフィックスについては説明を省略する。16は、各アクチュエータ12とステージ11の保持位置に形成されている接続ジョイントであり、後述するようにステージ11が任意の傾斜位置となるように傾斜してもアクチュエータ12はステージ11をその保持位置において保持可能とするようにステージ11を一点で軸支し、枢着可能な機構を構成している。
上記の構成において、ステージ11を上下に移動させる場合には、全てのアクチュエータ12−1乃至12−3に対し、パルスモータ13を同期して正回転あるいは逆回転し、上下直動軸15を同期して上下動させればよい。
また、図4に示すごとくステージ11を中央20に対してX方向に傾斜させるには、図5に示すように、アクチュエータ12−3を所定の高さ位置に保持した状態とし、残りのアクチュエータ12−1及び12−2を、アクチュエータ12−3と中心20を結ぶ直線を延長した位置と各頂点の距離Bに相当する上下方向位置±Lbとなるまで互いに異なる方向に上下させればよい。アクチュエータ12−1及び12−2を、例えば+Lb及び−Lbとなるように互いに同期して上下動させる動作を図6に示す。
図6に示すように、1つのアクチュエータ12−3を固定し、これに対して他のアクチュエータ12−1及び12−2を互いに逆動作となるように同期して相対的に+Lb及び−Lbとなるまで上下運動を繰り返すことにより、ステージ11をX方向に繰り返し傾斜揺動を行わせることができる。このとき、アクチュエータ12−1及び12−2の移動量は、以下の式(1)で表すことができ、±Lb=±B×tanθ・・式(1)、更に、θ=(移動角度/180)×π・・式(2)となるから、ステージ11におけるアクチュエータの保持位置を適当に選択することにより、ステージ11をX方向に±40度程度傾斜させることができ、これにより飛来する導電性粒子に対してかかる角度範囲にまで非導電性試料を傾斜する動作を繰り返すことが可能となるから、非導電性試料に導電性粒子をX方向にかかる角度位置の表面にまで付着することが可能となる。
次に、図7に示すごとくステージ11を中央20に対してY方向に傾斜させるには、図5に示すように、アクチュエータ12−1及び12−2を同期して同じ方向となるように上下移動量±Lc移動させ、かつアクチュエータ12−3を上記アクチュエータ12−1及び12−2と同期しこれとは逆方向に上下方向距離±Laで上下させればよい。この動作を図8に示す。図8に示すように、アクチュエータ12−1及び12−2を同期して±Lcで上下移動させると共に、アクチュエータ12−3を逆動作となるように同期して±Laとなるまで上下運動を繰り返すことにより、ステージ11をY方向に繰り返し傾斜揺動を行わせることができる。このとき、アクチュエータ12−1、12−2の移動量±Lc及びアクチュエータ12−3の移動量±Laは、以下の式(3)及び(4)で表すことができ、
±La=±A×tanθ・・式(3)、
±Lc=±C×tanθ・・式(4)、
更に、上記と同様にθ=(移動角度/180)×π・・式(2)であるから、ステージ11におけるアクチュエータの保持位置を適当に選択することにより、ステージ11をY方向に±40度程度傾斜させることができ、これにより飛来する導電性粒子に対してかかる角度位置にまで非導電性試料を傾斜する動作を繰り返すことが可能となるから、非導電性試料に導電性粒子をX方向にかかる角度位置の表面にまで付着することが可能となる。
ここで、ステージ11をY方向に傾斜を行わせる際の動作時には、同時間後にアクチュエータ12−1及び12−2と、アクチュエータ12−3では異なった移動量の上下移動制御を行う必要がある。従って、目的動作量Lxを達成する速度をアクチュエータ12−1及び12−2と、アクチュエータ12−3との間で異ならせて動作させるように制御されるが、そのときの速度比は移動量La及びLcに比例するので、各パルスモータの回転速度をこの割合で変化させることにより、同一時間経過後に目的傾斜角への動作を行わせることは容易に制御可能である。更に、上記X方向、Y方向を含む全ての面方位(360度の面方位)で特定の傾斜角(例えば、±40度の傾斜角)となるように、ステージ11を繰り返し傾斜揺動させ、これに載置された試料に飛来する導電性粒子を上記傾斜角度にまで非導電性試料を傾斜する動作を繰り返し、飛来する導電性粒子と対向する試料の全ての任意の側面及び内壁面を含む面に均一に導電性粒子を付着させるように、ステージ11をローテーション動作させるための動作について、図9及び図10に基づいて説明する。
図9は、ステージ11を上記X方向、Y方向を含む全ての面方位(360度の面方位)で特定の傾斜角(例えば、±40度の傾斜角)となるように、繰り返し傾斜揺動させるローテーション動作を示している。
この動作を図5及び図10を参照して説明する。図5において、アクチュエータ12−1、12−2及び12−3を半径Aの移動量Laまで、各アクチュエータ12の位相を1/3をずらして同方向に移動させるようにする。(各アクチュエータ12は、サイン運動あるいはコサイン運動されることになる。)図10に示すように、まずアクチュエータ12−1のサイン運動を開始し、これを移動距離±Laの間を上下させる。このアクチュエータ12−1のサイン運動の1/3周期完了時に、アクチュエータ12−2に対して同じサイン運動を開始し、同様にこのアクチュエータ12−2のサイン運動の1/3周期完了時にアクチュエータ12−3に対して同じサイン運動を開始する。このようにして各アクチュエータ12を互いに1/3周期すらして連動させて移動量±La間を上下移動させると、1周期においてステージ11は上記X方向、Y方向を含む全ての面方位(360度の面方位)で順次傾斜の方位が変化して、特定の傾斜角(例えば、±40度の傾斜角)となるように、傾斜されることとなる。以降同様にして、必要なローテーション回数となるまで各アクチュエータ12のサイン動作が繰り返されると、ステージ11は上記X方向、Y方向を含む全ての面方位(360度の面方位)で特定の傾斜角(例えば、±40度の傾斜角)となるように、繰り返し傾斜揺動されることとなる。
このようにして、ステージ11上に載置された試料は、飛来する導電性粒子を上記角度範囲にまで非導電性試料を360度の面方位で傾斜する動作を繰り返され、飛来する導電性粒子と対向する試料の全ての任意の側面及び内壁面を含む面に導電性粒子が付着されることとなる。該非導電性試料の飛来する導電性粒子と対向する試料の全ての任意の側面及び内壁面を含む面に均一に導電性粒子を付着させるためには、飛来する導電性粒子と対向する試料の全ての任意の側面及び内壁面を含む面が、均一の時間で飛来する導電性粒子と対向する必要がある。そこで、導電性粒子の付着の終了時には、図10の右端に示すように、アクチュエータ12−1停止後1/3周期後にアクチュエータ12−2を停止させ、更にその停止後1/3周期後にアクチュエータ12−3を停止すると同時に、スパッタリング装置あるいは真空蒸着装置における導電性微粒子の発生を停止すればよい。
図5に戻って、ステージ11の傾きθに対する各アクチュエータの移動量は、前記した式(3)と同様となる。
±La=±A×tanθ・・式(3)
また、同様にθ=(移動角度/180)×π・・式(2)であるから、ステージ11におけるアクチュエータの保持位置を適当に選択することにより、ステージ11をX方向、Y方向を含む全ての面方位(360度の面方位)に±40度程度傾斜させることができ、これにより飛来する導電性粒子に対してかかる角度範囲にまで非導電性試料を傾斜する動作を繰り返すことが可能となるから、非導電性試料に導電性粒子をすべての面方位(360度の面方位)において、かかる角度位置の表面にまで均一に付着することが可能となる。このためのステージ11のローテーションの総時間Tsumは、各アクチュエータ12の1周期の時間(s)をTおよびステージのローテーションの回数をNとすると、式(5)として表される。
Tsum=[T+(2/3×T)×N]・・式(5)
以上説明した図6、図8及び図10の実施例における各アクチュエータ12の移動速度について、図11を用いてその制御について説明する。
図11において、各アクチュエータ12の移動速度は、最頂点(例えば、±La)で最低速、移動量0位置で最高速を呈するサイン動作に比例した速度で上下に移動する。各アクチュエータ12の動きをサインカーブに従った速度で動作させたときの上下移動について図11で示している。図11において、(図5参照)ステージ11の半径をA、傾斜の最大角をθとしたときの移動量をLaとすると、上記したように、
±La=±A×tanθ・・式(3)
となり、このときの移動速度は最少(0)となる。
このときは、アクチュエータ12の上下動作を逆転するタイミングとなり、同時にパルスモータ13を逆転するタイミングとなるから、この制御は極めて容易に行われる。また、1周期の時間をTとして開始からTn時間までのアクチュエータ12の移動量をLnとすると、式(6)の関係が成り立つ。
Ln=A×sin[(Tn/T)×2π]・・式(6)
従って、開始からTn時間までのアクチュエータ12の移動量はLnとなり、更にLnから次の移動量も上記式(6)によって導くことができる。従って、パルスモータ13を式(6)に基づいて制御すれば、各アクチュエータ12をサイン動作に追従した時間動作で容易に上下動制御することができる。
以上の実施例においては、ステージ11はその中心部20を中心とした円板が用いられ、更にこの円板の端面(円弧位置)で当該円弧に内接する正三角形の頂点位置に3つのアクチュエータ12が設けられた例について説明したが、必ずしもこれに限られるものでなくてもよく、該ステージは、試料の載置されるステージ面の略中心から互いに離間した3つの保持位置で保持されると共に、各々の保持位置においてステージを上下動させる3つのアクチュエータによって上下動可能に保持されていればよく、更に3つのアクチュエータは互いの上下相対位置を連動して変化させることにより、ステージ面を任意の傾斜位置を形成させればよく、例えば、ステージ11は試料載置面が四角形状のものでもよく、また3つのアクチュエータ12は、必ずしも、ステージ11中央を中心とする円弧に内接する正三角形の頂点位置に設けられなくてもよい。
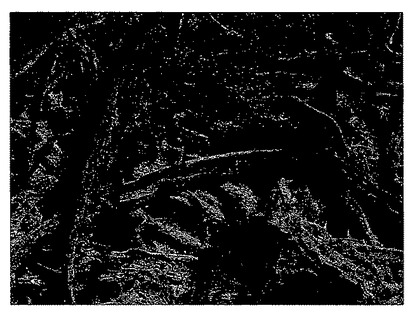
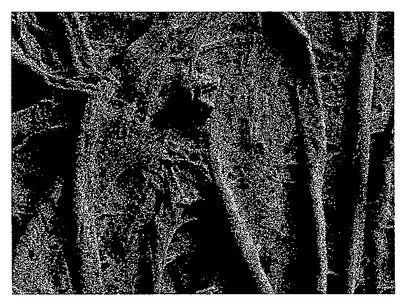
図12と図13に本発明の前処理装置によって、一般的に使用されている濾紙に導電性粒子を付着させた試料をJEOL製SEM装置で撮影したサンプル写真を示す。
図12は傾斜角0度で保持したままクローム微粒子の薄膜コーディング処理した該試料のSEM観察写真であり、図13は本発明の前処理装置で傾斜角30度でオールラウンド捩れ運動させ作成した上記薄膜コーティング該試料のSEM観察写真である。
前者のサンプル写真(図12)においては、濾紙の繊維の周辺部において試料の帯電に起因する像障害(白色像)が発生しており、その部分の観察が極めて困難となっているが、後者のサンプル写真(図13)から明らかなごとく、濾紙の繊維の周辺部や凹地及び微細な孔の内面の全方位に渡って試料の帯電に起因する像障害の発生が全くない鮮明な像が観察されている。
【産業上の利用可能性】
本発明によれば、走査型電子顕微鏡観察用もしくは電子線マイクロ分析用の、例えば菌などの有機生物(病原菌や細胞等)を代表として、表面に存在する複雑な形状、微細な孔の内部が存在する非導電性試料に対しても複雑な形状のあらゆる面及び微細な孔の内部にも薄膜微粒子を付着させることができ、観察中もしくは分析中の試料表面の帯電現象に起因する像障害の発生なく、試料の表面構造の正確な観察を可能にする。
半導体デバイス製造装置分野において、素材表面上に気相成長薄膜を作成する工程で素材を載置させるステージにも本発明の機構を用いることができる。更に、表面異物欠陥検査分野において、該装置の試料載置ステージ等にも本発明の機構を利用する事ができる。
【図面の簡単な説明】
【図1】は、本発明の一実施例を示す正面図。
【図2】は、本発明に用いられるステージ及びアクチュエータを示す斜視図。
【図3】は、本発明に用いられるステージ及びアクチュエータを示す上面図。
【図4】は、本発明に基づきステージをX方向に傾斜させる動作を示す図。
【図5】は、本発明に用いられるステージ及びアクチュエータの配置を示す上面図。
【図6】は、本発明に基づきステージをX方向に傾斜させる動作を示す図。
【図7】は、本発明に基づきステージをY方向に傾斜させる動作を示す図。
【図8】は、本発明に基づきステージをY方向に傾斜させる動作を示す図。
【図9】は、本発明に基づきステージを360度の面方位に傾斜させる動作を示す図。
【図10】は、本発明に基づきステージを360度の面方位に傾斜させる動作を示す図。
【図11】は、本発明のアクチュエータの動作速度を示す図。
【図12】は、非導電性試料の濾紙を前処理におけるチルト角零度のステージに置いて白金コーティングを施した後の500倍SEM観察写真。
【図13】は、本発明に基づくチルト角30度でステージを動作させながら白金コーティングされた濾紙の500倍SEM観察写真。
【符号の説明】
1: 真空チャンバー
2: プラズマスパッタ用ターゲット
3: プラズマ放電用供給電源
4: アノード電極
5: 排気ポンプ
6: ガス導入管
7: 制御器
8: 導入ガス供給源
9: 導入ガス量調整弁
10: 試料
11: ステージ(カソード電極)
12: アクチュエータ
13: パルスモータ
14: 回転・直動変換器
15: 上下直動軸
16: 接続ジョイント
【特許請求の範囲】
【請求項1】
走査型電子顕微鏡観察用もしくは電子線マイクロ分析用非導電性試料表面に導電性薄膜をコーティング作成するための前処理方法であって、真空チャンバー(1)内で導電性微粒子を発生する装置の該チャンバー(1)内に配置されたステージ(11)上に載置した試料(10)に導電性微粒子を飛来かつ付着させるためのステージを有し、該ステージ(11)を、試料を載置したステージ面の重心点から互いに離間した3つの保持位置で各々の下部に取り付けられた3つのアクチュエータ(12)により保持させると共に該アクチュエータ各々を上下方向に互いに連動して変化させることにより、該ステージ(11)面を任意選択した一定傾斜状態のまま保持することで該ステージ(11)に載置された試料(10)に任意選択された一定の該角度方向から導電性微粒子を飛来かつ付着させて該試料に導電性を付与するようにした非導電性試料の前処理方法。
【請求項2】
3つのアクチュエータ(12)の各々は、該ステージ(11)の保持位置において、ステージを任意の角度で軸支して保持する接続ジョイント(16)で保持するようにした請求項1記載の非導電性試料の前処理方法。
【請求項3】
3つのアクチュエータ(12)は、ステージの重心点の1点を中心とする円弧に内接する正三角形の頂点位置に配置されており、互いに連動して上下動させることにより、ステージを任意の高さに上下動させ、X方向及びこれと直交するY方向の任意の傾斜位置に保持するようにした請求項1記載の非導電性試料の前処理方法。
【請求項4】
3つのアクチュエータ(12)は、互いに位相が1/3周期ずらせて同一動作で順次所定距離上下駆動させ、ステージ面を360度方位で、所定の傾斜角を順次形成するように動作させ、これによりステージに載置された非導電性試料の任意の側面及び内壁面を含む面を導電性微粒子飛来方向に指向させるようにした請求項3記載の非導電性試料の前処理方法。
【請求項5】
3つのアクチュエータ(12)の各々は、回転・直動変換器(14)を介して各々パルスモータ(13)に接続されており、該パルスモータは相互に連動して上記3つのアクチュエータの上方及び下方への直線運動を行わせるように正転及び逆転駆動制御されるようにした請求項1乃至4のいずれか記載の非導電性試料の前処理方法。
【請求項6】
走査型電子顕微鏡観察用もしくは電子線マイクロ分析用非導電性試料表面に導電性薄膜コーティングを付与するための試料前処理装置であって、真空チャンバー内で導電性微粒子を発生する装置の該チャンバー内に配置され、この上に載置された試料に、導電性微粒子を飛来かつ付着させるようにしたステージと、該ステージを、試料の載置されるステージ面の重心点から互いに離間した3つの保持位置で保持すると共に、各々の保持位置においてステージを上下動させる3個のアクチュエータと、該3つのアクチュエータは互いの上下相対位置を連動して変化させることにより、ステージ面を任意の傾斜位置を形成させ、これによりステージに載置された試料に任意の角度から導電性微粒子を付着させて該試料に導電性を付与するようにした非導電性試料の前処理装置。
【請求項7】
該3つのアクチュエータの各々は、ステージの保持位置において、ステージを任意の角度で軸支して保持する接続ジョイントで保持するようにした請求項6記載の非導電性試料の前処理装置。
【請求項8】
該3つのアクチュエータは、ステージの重心点の1点を中心とする円弧に内接する正三角形の頂点位置に配置されており、互いに連動して上下動させることにより、ステージを任意の高さに上下動させ、X方向及びこれと直交するY方向の任意の傾斜位置に保持するようにした請求項6記載の非導電性試料の前処理装置。
【請求項9】
該3つのアクチュエータは、互いに位相が1/3周期ずらせて同一動作で順次所定距離上下駆動させ、ステージ面を360度方位で、所定の傾斜角を順次形成するように動作させ、これによりステージに載置された試料の任意の側面及び内壁面を含む面を導電性微粒子飛来方向に指向させるようにした請求項8記載の非導電性試料の前処理装置。
【請求項10】
3つのアクチュエータの各々は、回転・直動変換器を介して各々パルスモータに接続されており、該パルスモータは相互に連動して上記3つのアクチュエータの上方及び下方への直線運動を行わせるように正転及び逆転駆動制御されるようにした請求項6乃至9のいずれか記載の非導電性試料の前処理装置。
【請求項1】
走査型電子顕微鏡観察用もしくは電子線マイクロ分析用非導電性試料表面に導電性薄膜をコーティング作成するための前処理方法であって、真空チャンバー(1)内で導電性微粒子を発生する装置の該チャンバー(1)内に配置されたステージ(11)上に載置した試料(10)に導電性微粒子を飛来かつ付着させるためのステージを有し、該ステージ(11)を、試料を載置したステージ面の重心点から互いに離間した3つの保持位置で各々の下部に取り付けられた3つのアクチュエータ(12)により保持させると共に該アクチュエータ各々を上下方向に互いに連動して変化させることにより、該ステージ(11)面を任意選択した一定傾斜状態のまま保持することで該ステージ(11)に載置された試料(10)に任意選択された一定の該角度方向から導電性微粒子を飛来かつ付着させて該試料に導電性を付与するようにした非導電性試料の前処理方法。
【請求項2】
3つのアクチュエータ(12)の各々は、該ステージ(11)の保持位置において、ステージを任意の角度で軸支して保持する接続ジョイント(16)で保持するようにした請求項1記載の非導電性試料の前処理方法。
【請求項3】
3つのアクチュエータ(12)は、ステージの重心点の1点を中心とする円弧に内接する正三角形の頂点位置に配置されており、互いに連動して上下動させることにより、ステージを任意の高さに上下動させ、X方向及びこれと直交するY方向の任意の傾斜位置に保持するようにした請求項1記載の非導電性試料の前処理方法。
【請求項4】
3つのアクチュエータ(12)は、互いに位相が1/3周期ずらせて同一動作で順次所定距離上下駆動させ、ステージ面を360度方位で、所定の傾斜角を順次形成するように動作させ、これによりステージに載置された非導電性試料の任意の側面及び内壁面を含む面を導電性微粒子飛来方向に指向させるようにした請求項3記載の非導電性試料の前処理方法。
【請求項5】
3つのアクチュエータ(12)の各々は、回転・直動変換器(14)を介して各々パルスモータ(13)に接続されており、該パルスモータは相互に連動して上記3つのアクチュエータの上方及び下方への直線運動を行わせるように正転及び逆転駆動制御されるようにした請求項1乃至4のいずれか記載の非導電性試料の前処理方法。
【請求項6】
走査型電子顕微鏡観察用もしくは電子線マイクロ分析用非導電性試料表面に導電性薄膜コーティングを付与するための試料前処理装置であって、真空チャンバー内で導電性微粒子を発生する装置の該チャンバー内に配置され、この上に載置された試料に、導電性微粒子を飛来かつ付着させるようにしたステージと、該ステージを、試料の載置されるステージ面の重心点から互いに離間した3つの保持位置で保持すると共に、各々の保持位置においてステージを上下動させる3個のアクチュエータと、該3つのアクチュエータは互いの上下相対位置を連動して変化させることにより、ステージ面を任意の傾斜位置を形成させ、これによりステージに載置された試料に任意の角度から導電性微粒子を付着させて該試料に導電性を付与するようにした非導電性試料の前処理装置。
【請求項7】
該3つのアクチュエータの各々は、ステージの保持位置において、ステージを任意の角度で軸支して保持する接続ジョイントで保持するようにした請求項6記載の非導電性試料の前処理装置。
【請求項8】
該3つのアクチュエータは、ステージの重心点の1点を中心とする円弧に内接する正三角形の頂点位置に配置されており、互いに連動して上下動させることにより、ステージを任意の高さに上下動させ、X方向及びこれと直交するY方向の任意の傾斜位置に保持するようにした請求項6記載の非導電性試料の前処理装置。
【請求項9】
該3つのアクチュエータは、互いに位相が1/3周期ずらせて同一動作で順次所定距離上下駆動させ、ステージ面を360度方位で、所定の傾斜角を順次形成するように動作させ、これによりステージに載置された試料の任意の側面及び内壁面を含む面を導電性微粒子飛来方向に指向させるようにした請求項8記載の非導電性試料の前処理装置。
【請求項10】
3つのアクチュエータの各々は、回転・直動変換器を介して各々パルスモータに接続されており、該パルスモータは相互に連動して上記3つのアクチュエータの上方及び下方への直線運動を行わせるように正転及び逆転駆動制御されるようにした請求項6乃至9のいずれか記載の非導電性試料の前処理装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【公開番号】特開2011−7762(P2011−7762A)
【公開日】平成23年1月13日(2011.1.13)
【国際特許分類】
【出願番号】特願2009−169513(P2009−169513)
【出願日】平成21年6月26日(2009.6.26)
【出願人】(502441857)株式会社エーティーエー (3)
【Fターム(参考)】
【公開日】平成23年1月13日(2011.1.13)
【国際特許分類】
【出願日】平成21年6月26日(2009.6.26)
【出願人】(502441857)株式会社エーティーエー (3)
【Fターム(参考)】
[ Back to top ]