
電気チェーンブロックの荷重判別装置、及び荷重判別方法
【課題】電気チェーンブロックのトルク電流から、巻上運転開始後短時間で、且つ精度良く荷重の判別ができる電気チェーンブロックの荷重判別装置、及び荷重判別方法を提供すること。
【解決手段】巻上下電動機12、インバータ制御装置11を備え、巻上下電動機12によりシーブ15を回動させ、該シーブ15に係合するチェーン16を巻上下する電気チェーンブロックの荷重判別装置であって、インバータ制御装置11から巻上下電動機12に供給されるモータ電流を検出する電流検出素子21と、荷重判別部20を備え、該荷重判別部20で検出したモータ電流からトルク電流、トルク電流の変動周期、変動周期間の平均トルク電流値、移動平均トルク電流値を設定閾値と比較して荷重判定を行う。
【解決手段】巻上下電動機12、インバータ制御装置11を備え、巻上下電動機12によりシーブ15を回動させ、該シーブ15に係合するチェーン16を巻上下する電気チェーンブロックの荷重判別装置であって、インバータ制御装置11から巻上下電動機12に供給されるモータ電流を検出する電流検出素子21と、荷重判別部20を備え、該荷重判別部20で検出したモータ電流からトルク電流、トルク電流の変動周期、変動周期間の平均トルク電流値、移動平均トルク電流値を設定閾値と比較して荷重判定を行う。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、巻上下電動機がインバータで駆動される電気チェーンブロックの吊り上げ荷重を運転開始後短時間に高精度で判別できる荷重判別装置、及び荷重判別方法に関する。
【背景技術】
【0002】
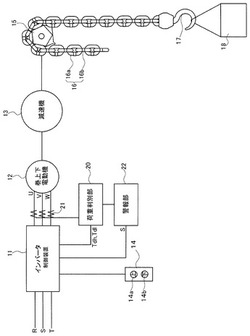
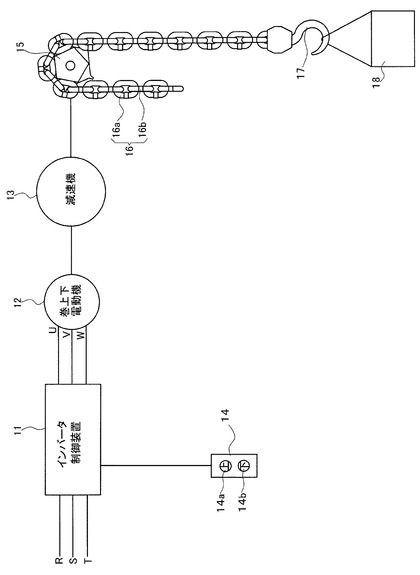
図1はインバータ駆動の電気チェーンブロックの概略構成を示す図である。図示するように、電気チェーンブロックはインバータ制御装置11、巻上下電動機12、減速機13、及び操作ボックス14を備えている。操作ボックス14には2段押の巻上用ボタン14a及び巻下用ボタン14bを備えている。巻上用ボタン14aの1段押しでは低速巻上信号を、2段押しでは高速巻上信号をそれぞれインバータ制御装置に出力し、巻下用ボタン14bの1段押しでは低速巻下信号を、2段押しでは高速巻下信号をそれぞれインバータ制御装置に出力するようになっている。
【0003】
インバータ制御装置11は操作ボックス14からの低速巻上信号、高速巻上信号、低速巻下信号、及び高速巻下信号を受けて、所定周波数の低速巻上用電力、高速巻上用電力、低速巻下用電力、及び高速巻下用電力を巻上下電動機12に供給し、巻上下電動機12は低速又は高速で正転又は逆転する。これにより、減速機13を介してシーブ15が低速又は高速で正転又は逆転し、該シーブ15に係合するチェーン16が低速又は高速で巻上又は巻下し、該チェーン16の下端にフック17を介して吊り下げられた荷重18は低速又は高速で上昇又は下降する。
【0004】
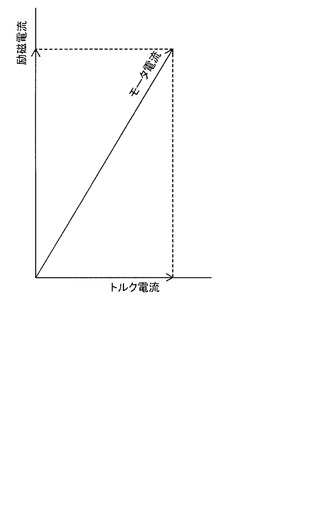
上記電気チェーンブロックにおいて、インバータ制御装置11から巻上下電動機12に供給される電流(以下「モータ電流」という)は、出力周波数と、出力電圧に対する各相の電流の位相から、図2に示すように、励磁電流(磁束を発生させるのに必要な電流)とトルク電流(負荷トルクに比例する電流)とにベクトル演算により分割できる。従って、モータ電流を検出し、該モータ電流をベクトル演算により励磁電流とトルク電流に分割することにより、このトルク電流値により荷重18の大きさを高精度で判別できる。
【0005】
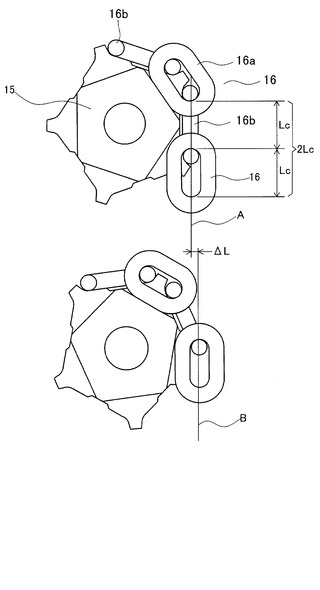
ところが、特許文献2に示す電動ロープホイストの場合は、トルク電流値により、略正確に荷重の大きさを判別できるが、電気チェーンブロックでは下記に示すように、同一の略楕円形状をした、縦リンク16aと横リンク16bが交互に連接するチェーン16を多角形のシーブ15で巻上下する構成であるので、荷重が同じでも負荷トルクが変動し、トルク電流値が周期的に変動するため、精度の良い荷重判別ができないという問題がある。図3に示すように、シーブ15の回転角度により、チェーン16の中心線A,Bの位置、即ち荷重芯が所定の範囲ΔL内でシープ15の回転中心から離間したり、接近したりする。この離間接近により、シーブ15に加わる負荷トルクが所定範囲で変動し、該負荷トルクの変動によりインバータ制御装置11から巻上下電動機12に供給される電流値も変動する。なお、図3において、Lcはチェーン16の1リンク分の長さを示す。
【0006】
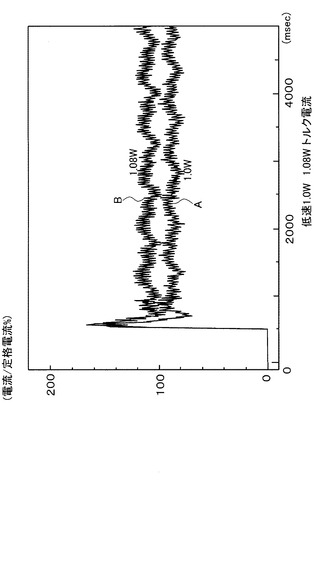
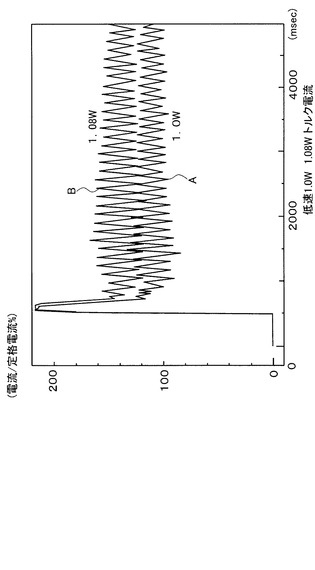
図4は電気チェーンブロックの低速巻上運転でのトルク電流の変化を示す図で、曲線Aは定格荷重(負荷)(1.0W)のトルク電流の変化(電流/定格電流[%])であり、曲線Bは定格荷重×1.08(1.08W)のトルク電流の変化の状態をそれぞれ示す。また、図5は電気チェーンブロックの高速巻上運転でのトルク電流の変化を示す図で、曲線Aは定格荷重(1.0W)のトルク電流の変化(電流/定格電流[%])であり、曲線Bは定格荷重×1.08(1.08W)のトルク電流の変化の状態をそれぞれ示す。電動巻上機において荷重が定格荷重までは確実に巻上げ、定格荷重の1.08倍を超えると巻上下運転を自動停止しなければならないという要求がある。このように、判別すべき荷重差が小さい場合には、その負荷変動より電気チェーンブロックの多角形シーブによる負荷変動が大きくなり、負荷が1.0Wと1.08Wとの境界が判別できないという問題がある。また、低速巻上運転でも起動時は負荷が1.0Wと1.08Wとの境界が判別できないという問題がある。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開2009−29590号公報
【特許文献2】特開平11−246184号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
本発明は上述の点に鑑みてなされたもので、電気チェーンブロックのトルク電流から、巻上運転開始後短時間で、且つ精度良く荷重の判別ができる電気チェーンブロックの荷重判別装置、及び荷重判別方法を提供することを目的とする。
【課題を解決するための手段】
【0009】
上記の課題を解決するために、本発明は、巻上下電動機、該巻上下電動機に駆動電力を供給するインバータ制御装置を備え、巻上下電動機によりシーブを回動させ、該シーブに係合するチェーンを巻上下する電気チェーンブロックの荷重判別装置であって、インバータ制御装置から巻上下電動機に供給されるモータ電流を検出するモータ電流検出手段と、検出したモータ電流からベクトル演算によりトルク電流を算出するトルク電流算出手段と、算出したトルク電流の電気チェーンブロックの巻上速度に応じた直前の所定期間の平均値を連続して算出する移動平均トルク電流値算出手段と、移動平均トルク電流値を設定閾値と比較し巻上荷重値が所定超過荷重値を超えているか否かを判定する荷重判定手段を備えたことを特徴とする。
【0010】
また、本発明は、上記電気チェーンブロックの荷重判別装置において、移動平均トルク電流値算出手段の所定期間は、電気チェーンブロックのトルク電流の変動周期を算出するトルク電流変動周期算出手段によって算出することを特徴とする。
【0011】
また、本発明は、上記電気チェーンブロックの荷重判別装置において、トルク電流変動周期算出手段は高速巻上時及び低速巻上時のトルク電流変動周期を算出できるようになっており、移動平均トルク電流値算出手段は高速巻上時及び低速巻上時の移動平均トルク電流を算出できるようになっており、荷重判定手段は高速巻上時と低速巻上時では、それぞれ異なる値の閾値を設定し、高速巻上時と低速巻上時でそれぞれ巻上荷重値が所定超過荷重値を超えているか否かを判定することを特徴とする。
【0012】
また、巻上下電動機、該巻上下電動機に駆動電力を供給するインバータ制御装置を備え、巻上下電動機によりシーブを回動させ、該シーブに係合するチェーンを巻上下する電気チェーンブロックの荷重判別方法であって、インバータ制御装置から巻上下電動機に供給されるモータ電流を検出し、該検出したモータ電流からベクトル演算によりトルク電流を算出し、トルク電流の電気チェーンブロックの巻上速度に応じた直前の所定期間の平均値を連続して算出し移動平均トルク電流値となし、移動平均トルク電流値を設定閾値と比較し巻上荷重値が所定超過荷重値を超えているか否かを判断して荷重判別を行うことを特徴とする。
【0013】
また、上記電気チェーンブロックの荷重判別方法において、電気チェーンブロックの巻上速度からチェーンの2リンク分を巻き上げる時間を算出し移動平均トルク電流値を算出する所定期間とすることを特徴とする。
【0014】
また、上記電気チェーンブロックの荷重判別方法において、トルク電流の算出は高速巻上時と低速巻上時に行い、移動平均トルク電流値を算出する所定期間は、高速巻上時と低速巻上時と別々に設定し、移動平均トルク電流値の算出は高速巻上時と低速巻上時に行い、高速巻上時の移動平均トルク電流値と設定閾値を比較し巻上荷重値が所定超過荷重値を超えているか否かを判断すると共に、低速巻上時の移動平均トルク電流値と設定閾値を比較し巻上荷重値が所定超過荷重値を超えているか否かを判断して荷重判別を行うことを特徴とする。
【0015】
また、上記電気チェーンブロックの荷重判別方法において、高速時の荷重判別は起動トルク電流が終了してから行い、低速時の荷重判別は起動電流が終了する前から行うことを特徴とする。
【発明の効果】
【0016】
本発明は、電気チェーンブロックの変動するトルク電流の移動平均トルク電流値を算出して荷重判別を行うものであって、直前のチェーンの2リンク分を巻き上げる期間の平均トルク電流値を連続して算出して移動平均トルク電流値となし、予め設定された閾値と該移動平均値トルク電流値を比較して荷重判別を行うので、電気チェーンブロックの巻上運転開始後短時間で、且つ精度良く荷重の判別ができる。
【図面の簡単な説明】
【0017】
【図1】インバータ駆動の電気チェーンブロックの概略構成を示す図である。
【図2】電気チェーンブロックのモータ電流の励磁電流とトルク電流の関係を示す図である。
【図3】電気チェーンブロックのシーブの回転によるチェーンの中心線の揺動状態を示す図である。
【図4】電気チェーンブロックの低速巻上運転でのトルク電流の変化を示す図である。
【図5】電気チェーンブロックの高速巻上運転でのトルク電流の変化を示す図である。
【図6】低速時のトルク電流と巻上げ速度変動を示す図である。
【図7】高速時のトルク電流と巻上げ速度変動を示す図である。
【図8】低速時の平均トルク電流の変化を示す図である。
【図9】低速時の平均トルク電流の変化を示す図である。
【図10】本発明に係る電気チェーンブロックの上記荷重判別の処理フローを示す図である。
【図11】本発明に係る荷重判別装置を備えたインバータ駆動の電気チェーンブロックの概略構成を示す図である。
【発明を実施するための形態】
【0018】
以下、本発明の実施の形態について、詳細に説明する。本発明に係る荷重判別装置、及び荷重判別方法を実施する電気チェーンブロックの概略構成は図1と同一であるから、その図示と説明は省略する。図1に示すような、電気チェーンブロックにおいて、インバータ制御装置11から巻上下電動機12に供給されるモータ電流はベクトル演算により、図2に示すように、励磁電流とトルク電流に分割できる。このトルク電流は巻上下電動機12の負荷(ここでは吊り上げ荷重18の大きさ)に比例するから、このトルク電流を電気チェーンブロックの設定許容値(閾値)と比較し、トルク電流が閾値を超えているか否によって、過負荷状態か否を判別できる。
【0019】
電気チェーンブロックの吊上げ荷重について、定格荷重(定格負荷)までは確実に巻上げ、定格荷重の1.08倍を超えると自動的に巻上を停止しなければならないという要求がある。ところが、図4及び図5に示すように、電気チェーンブロックの巻上運転でのトルク電流は同じ荷重でも周期的に変動し、巻上なければならない定格荷重(1.0W)と巻上を禁止する荷重(1.08W)との間に適正な閾値を設定できないという問題、特に起動時は1.0W時のトルク電流と1.08W時のトルク電流は重複する範囲にあるため、トルク電流での精度の良い荷重判定ができない。
【0020】
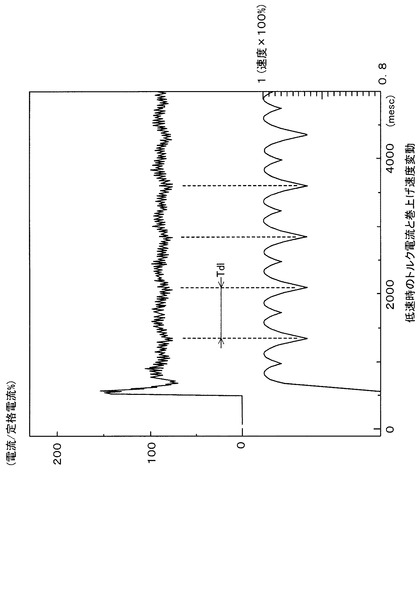
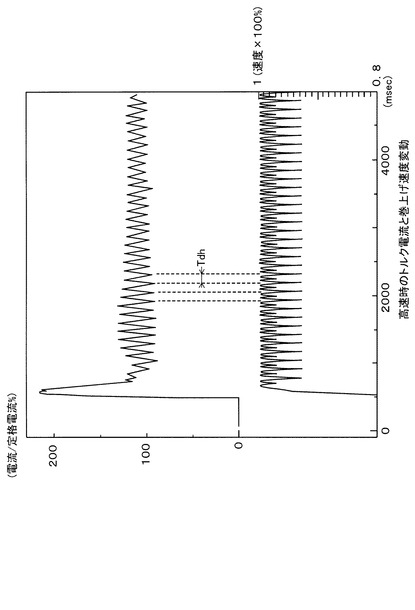
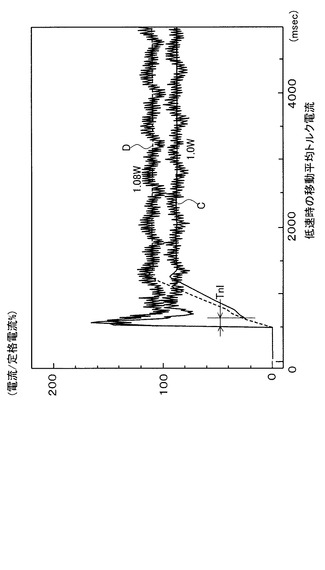
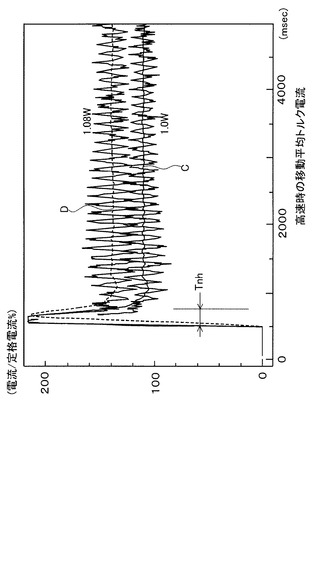
ところで、トルク電流の変動と巻上速度の変動を低速の場合と、高速の場合で見ると、それぞれ図6、図7のようになる。図示するように、低速巻上でも高速巻上でも所定周期T(Tdl,Tdh)で速度が変動し、この速度変動と同じ周期T(Tdl,Tdh)でトルク電流が変動していることが分かる。この周期Tは縦リンク16aと横リンク16bの1組をシーブ15で巻き上げる時間と一致している。ここで各周期Tを基準とする移動平均電流値をとると、図8及び図9の曲線C、Dに示すようになる。即ち曲線Cは1.0W時のトルク電流の移動平均を、曲線Dは1.08W時のトルク電流の移動平均をそれぞれ示す。図8及び図9に示すように、起動時から所定期間を除くと、曲線CとDは明確に区分され、この間に所定閾値を設定することにより、巻上下電動機12の負荷、即ち荷重18がこの閾値を超えたか否かを高精度で判別することが可能となる。
【0021】
ここで、図8の低速時の移動平均トルク電流値の変化を示す図の移動平均トルク電流値の算出方法を説明する。F:インバータ制御装置11の出力周波数(Hz)、P:巻上下電動機12の極数、e:巻上下電動機12のすべり率、N:巻上下電動機12の回転数(rpm)、S:シーブ15の回転数(rpm)、M:減速機13の減速比、K:シーブ15の角数、T:図3に示すようにチェーンを2リンクの長さ2Lc分巻き上げる時間(sec)とすると、
N=120×F/P×(1−e) (1)
S=N×M (2)
T=60/S/K (3)
式(1),(2),(3)より
T=P/{2×F×(1−e)×M×K} (4)
となる。
【0022】
F=5Hz(低速時出力周波数)、P=4、e=0.05、M=0.06、K=5とすると、式(4)より変動周期Tは、1.404秒となる。インバータ制御装置11のベクトル演算によって10ミリ秒ごとに算出(サンプリング)したトルク電流値を書き換えながら最新の所定個をメモリに格納するものとすると、メモリに格納したトルク電流値のなかの直前の141個(1.404/0.010=140.4)のトルク電流値の平均値を算出して移動平均トルク電流値とする。図8はトルク電流値を算出(サンプリング)するごと(10ミリ秒ごと)にこの移動平均トルク電流値を連続して算出しグラフ化したものである。なお、起動時点から変動周期T(1.404秒)に満たない期間の移動平均トルク電流値も起動時からのトルク電流値の積算値を変動周期Tをサンプリング間隔(10ミリ秒)で割った数(141)で割り算して算出している。
【0023】
次に図9の高速時の移動平均トルク電流値の変化を示す図の移動平均トルク電流値の算出方法を説明する。低速時と同様に、インバータ制御装置11のベクトル演算によって10ミリ秒ごとに算出(サンプリング)したトルク電流値を書き換えながら、最新の所定個をメモリに格納する。F=60Hz(高速時出力周波数)、P=4、e=0.05、M=0.06、K=5とすると、式(4)より変動周期Tは0.117秒となる。メモリに格納したトルク電流値のなかの直前の12個(0.117/0.010=11.7)の平均値を算出して移動平均トルク電流値とする。図9はトルク電流値を算出(サンプリング)するごと(10ミリ秒ごと)にこの移動平均トルク電流値を連続して算出しグラフ化したものである。なお、起動時点から変動周期T(0.117秒)に満たない期間の移動平均トルク電流値も起動時からのトルク電流値の積算値を変動周期Tをサンプリング間隔(10ミリ秒)で割った数(12)で割り算して算出している。
【0024】
近年、インバータ駆動の電気チェーンブロックにおいて、インバータ制御装置11から巻上下電動機12に供給されるモータ電流をベクトル演算により、図2に示すように励磁電流とトルク電流に分割し、負荷(荷重18)に見合ったモータ電流を流せるように電圧の補正を行うことによって低速で高トルクを得られるように構成した電気チェーンブロックがある。この電気チェーンブロックではインバータ制御装置11に巻上下電動機12に供給されるモータ電流を検出し、該モータ電流をベクトル演算により、励磁電流とトルク電流に分割する機能を備えている。そこで、このインバータ制御装置11に上記(1)〜(4)によりトルク電流変動の周期Tを算出する機能と、この周期Tに相当する時間を基準とする移動平均トルク電流値を算出する機能と、この移動平均トルク電流値と設定閾値を比較することにより荷重18が過負荷状態にあるか否かを判別する荷重判別機能を持たせることにより、短時間で且つ高精度に荷重判別が可能となる。
【0025】
図9の高速時の移動平均トルク値では、1.0Wの移動平均トルク電流値を表す曲線Cは、起動時において、1.08Wの移動平均トルク電流値を表す曲線Dの平坦部の値を超えているが、図8の低速時の移動平均トルク値では、1.0Wの移動平均トルク電流値を表す曲線Cは、起動時においても、1.08Wの移動平均トルク電流値を表す曲線Dの平坦部(安定部)の値を超えていないので、閾値をこの曲線Dの平坦部(安定部)より所定量小さい値と1.0Wの移動平均トルク電流値を表す曲線Cの最高値との間の値とすることで、起動時から起動電流が終了していなくとも移動平均トルク値は、荷重が1.0W以下であれば閾値を超えることはなく、1.0Wの荷重を超過荷重と誤認することはない。一方、高速時においては、起動時の所定時間Tnh終了後に判別を開始するものとすれば、1.0Wの荷重を超過荷重と誤認することはない。
【0026】
上記の例では、変動周期Tの1周期を移動平均トルク電流値の算出基準としたが、変動周期Tの整数倍を基準とする移動平均トルク電流値を用いれば、更にトルク電流値を平滑化して判別の精度が向上するが、1周期を基準とする方法と比べ過負荷の検知が遅くなるので、1周期分を基準とする移動平均トルク電流値を判別基準とするのが最良である。
【0027】
上記(1)〜(4)式において、変動周期Tは、インバータ制御装置11が巻上下電動機に出力する出力周波数によって算出し設定するようにしているが、巻上下電動機12の出力軸の回転数、又はシーブ15の回転数、又は減速機13の歯車軸等の回転数を計測して、或いはチェーン16の2リンク分を巻き上げるのに要する時間を逐次計測することによって、変動周期を算出するようにしても良いが、電動巻上装置に供給する出力周波数から巻上下電動機12の回転数を算出する方法が簡便でかつ十分精度を有している。或いは、電気チェーンブロックに予め設定された速度に応じた変動周期をメモリに記憶し、指令速度に応じた変動周期をメモリから読み出し、変動周期(移動平均トルク電流値を算出する基準期間:平均値を算出するサンプリング数)に設定するようにしても良い。
【0028】
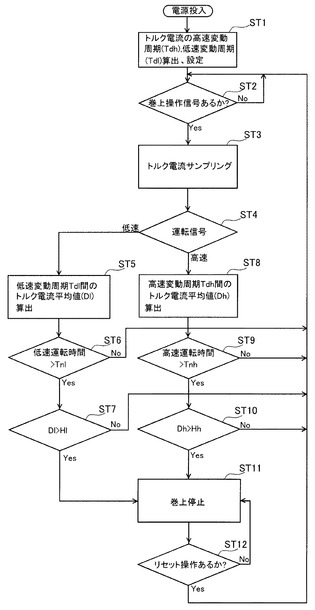
図10は上記荷重判別の処理フローを示す図である。先ず電気チェーンブロックの電源を投入し、ステップST1において、高速運転でのトルク電流の変動周期である高速変動周期(Tdh)と低速運転でのトルク電流の変動周期である低速変動周期(Tdl)を上記(1)〜(4)式により算出して設定し、ステップST2に移行する。ステップST2では、操作ボックス14から巻上操作信号があるかを判断し、Yesの場合ステップST3に移行する。ステップST2においてNoの場合にはサンプリングし所定数メモリに記憶したトルク電流値をリセットすることが好ましい。ステップST3では、トルク電流のサンプリング(測定・算出)を開始し、ステップST4に移行する。ステップST4では、運転信号が高速か低速かを判断し、低速の場合はステップST5に移行し、高速の場合はステップST8に移行する。
【0029】
ステップST5では、低速変動周期Tdlを基準とする移動平均トルク電流値Dlを算出し、ステップST6に移行する。ステップST6では、低速運転時間が低速起動電流無視時間Tnl(図8参照)を越えたか(低速運転時間>Tnl)を判断し、Noの場合は前記ステップST2に戻り、Yesの場合はステップST7に移行する。ステップST7では、ステップST5で算出した移動平均トルク電流平均値Dlが低速時移動平均閾値Hl以上(Dl>Hl)かを判断し、Noの場合は前記ステップST2に戻り、Yesの場合はステップST11に移行し、巻上停止を行う。
【0030】
前記ステップST8では、高速変動周期Td hを基準とする移動平均トルク電流値Dhを算出し、ステップST9に移行する。ステップST9では、高速運転時間が高速起動電流無視時間Tnh(図9参照)を越えたか(高速運転時間>Tnh)を判断し、Noの場合は前記ステップST2に戻り、Yesの場合はステップST10に移行する。ステップST10では、ステップST8で算出した移動平均トルク電流値Dhが高速時移動平均閾値Hh以上(Dh>Hh)を判断し、Noの場合は前記ステップST2に戻り、Yesの場合はステップST11に移行し、巻上停止を行う。なお、上記低速起動電流無視時間Tnl、及び高速起動電流無視時間Tnhは起動電流が小さくなり平均閾値により過負荷荷重を判別できる最短時間に設定することにより、巻上運転開始後最短時間で高精度の荷重判別が可能となる。前述の通り図8に示す様な場合には、Tnlを0とすることができる。
【0031】
ステップST11で巻上停止を行ったらステップST12に移行し、該ステップST12でリセット操作があるか否かを判断し、Noであったらリセット操作を待ち、YesであったらステップST2にもどる。リセット操作は、非常停止ボタン又は巻下用ボタン14bの押下げにより行われる。
【0032】
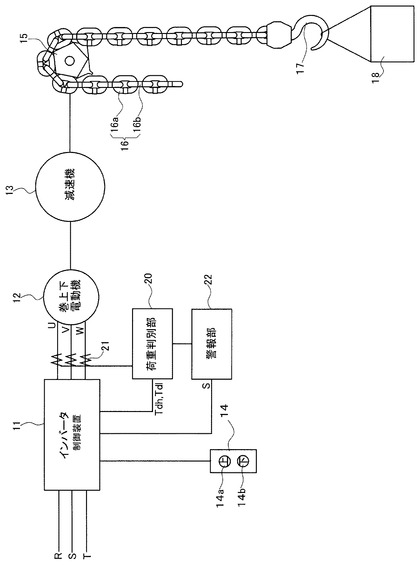
なお、上記実施形態例では、インバータ制御装置11から巻上下電動機12に供給されるモータ電流の検出、該モータ電流をベクトル演算により励磁電流とトルク電流に分割する処理、上記(1)〜(4)式によりトルク電流変動の周期Tを算出、周期Tを基準とする移動平均トルク電流値を算出、移動平均トルク電流値と設定閾値を比較等の処理をインバータ制御装置で行うようになっているがこれに限定されるものではない。例えば図11に示すようにインバータ制御装置11とは別に荷重判別部20を設け、該荷重判別部20に電流検出素子21で検出したモータ電流、インバータ制御装置11から高速,低速時のトルク電流の変動周期Tdh,Tdlを入力する。そして荷重判別部20でベクトル演算により高速,低速時のモータ電流から高速,低速時トルク電流を算出し、該高速,低速時トルク電流を高速,低速時のトルク電流変動周期Tdh,Tdlを基準とする、高速,低速時の移動平均トルク電流値を算出し、これと設定閾値を比較し、高速,低速時の移動平均トルク電流値が閾値を超えたら、過負荷と判断し、警報部22に過負荷信号を出力し、警報を発したり、インバータ制御装置11に停止信号Sを送るようにしてもよい。
【0033】
以上、本発明の実施形態を説明したが、本発明は上記実施形態に限定されるものではなく、特許請求の範囲、及び明細書、図面に記載された技術的思想の範囲内において種々の変形が可能である。
【産業上の利用可能性】
【0034】
本発明は、インバータから巻上下電動機に供給されるモータ電流を検出するモータ電流検出手段と、該検出したモータ電流からベクトル演算によりトルク電流を算出するトルク電流算出手段と、該トルク電流の変動周期を算出するトルク電流変動周期算出手段と、トルク電流平均値をトルク電流の変動周期間のサンプリングデータから算出する平均トルク電流値算出手段と、平均トルク電流値を設定閾値と比較し巻上荷重値が所定超過荷重値を超えているか否かを判定する荷重判定手段を備えたので、巻上運転始動時短時間で、且つ精度良く荷重の判別ができる電気チェーンブロックの荷重判別装置として利用することができる。
【符号の説明】
【0035】
11 インバータ制御装置
12 巻上下電動機
13 減速機
14 操作ボックス
15 シーブ
16 チェーン
17 フック
18 荷重
20 荷重判別部
21 電流検出素子
22 警報部
【技術分野】
【0001】
本発明は、巻上下電動機がインバータで駆動される電気チェーンブロックの吊り上げ荷重を運転開始後短時間に高精度で判別できる荷重判別装置、及び荷重判別方法に関する。
【背景技術】
【0002】
図1はインバータ駆動の電気チェーンブロックの概略構成を示す図である。図示するように、電気チェーンブロックはインバータ制御装置11、巻上下電動機12、減速機13、及び操作ボックス14を備えている。操作ボックス14には2段押の巻上用ボタン14a及び巻下用ボタン14bを備えている。巻上用ボタン14aの1段押しでは低速巻上信号を、2段押しでは高速巻上信号をそれぞれインバータ制御装置に出力し、巻下用ボタン14bの1段押しでは低速巻下信号を、2段押しでは高速巻下信号をそれぞれインバータ制御装置に出力するようになっている。
【0003】
インバータ制御装置11は操作ボックス14からの低速巻上信号、高速巻上信号、低速巻下信号、及び高速巻下信号を受けて、所定周波数の低速巻上用電力、高速巻上用電力、低速巻下用電力、及び高速巻下用電力を巻上下電動機12に供給し、巻上下電動機12は低速又は高速で正転又は逆転する。これにより、減速機13を介してシーブ15が低速又は高速で正転又は逆転し、該シーブ15に係合するチェーン16が低速又は高速で巻上又は巻下し、該チェーン16の下端にフック17を介して吊り下げられた荷重18は低速又は高速で上昇又は下降する。
【0004】
上記電気チェーンブロックにおいて、インバータ制御装置11から巻上下電動機12に供給される電流(以下「モータ電流」という)は、出力周波数と、出力電圧に対する各相の電流の位相から、図2に示すように、励磁電流(磁束を発生させるのに必要な電流)とトルク電流(負荷トルクに比例する電流)とにベクトル演算により分割できる。従って、モータ電流を検出し、該モータ電流をベクトル演算により励磁電流とトルク電流に分割することにより、このトルク電流値により荷重18の大きさを高精度で判別できる。
【0005】
ところが、特許文献2に示す電動ロープホイストの場合は、トルク電流値により、略正確に荷重の大きさを判別できるが、電気チェーンブロックでは下記に示すように、同一の略楕円形状をした、縦リンク16aと横リンク16bが交互に連接するチェーン16を多角形のシーブ15で巻上下する構成であるので、荷重が同じでも負荷トルクが変動し、トルク電流値が周期的に変動するため、精度の良い荷重判別ができないという問題がある。図3に示すように、シーブ15の回転角度により、チェーン16の中心線A,Bの位置、即ち荷重芯が所定の範囲ΔL内でシープ15の回転中心から離間したり、接近したりする。この離間接近により、シーブ15に加わる負荷トルクが所定範囲で変動し、該負荷トルクの変動によりインバータ制御装置11から巻上下電動機12に供給される電流値も変動する。なお、図3において、Lcはチェーン16の1リンク分の長さを示す。
【0006】
図4は電気チェーンブロックの低速巻上運転でのトルク電流の変化を示す図で、曲線Aは定格荷重(負荷)(1.0W)のトルク電流の変化(電流/定格電流[%])であり、曲線Bは定格荷重×1.08(1.08W)のトルク電流の変化の状態をそれぞれ示す。また、図5は電気チェーンブロックの高速巻上運転でのトルク電流の変化を示す図で、曲線Aは定格荷重(1.0W)のトルク電流の変化(電流/定格電流[%])であり、曲線Bは定格荷重×1.08(1.08W)のトルク電流の変化の状態をそれぞれ示す。電動巻上機において荷重が定格荷重までは確実に巻上げ、定格荷重の1.08倍を超えると巻上下運転を自動停止しなければならないという要求がある。このように、判別すべき荷重差が小さい場合には、その負荷変動より電気チェーンブロックの多角形シーブによる負荷変動が大きくなり、負荷が1.0Wと1.08Wとの境界が判別できないという問題がある。また、低速巻上運転でも起動時は負荷が1.0Wと1.08Wとの境界が判別できないという問題がある。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開2009−29590号公報
【特許文献2】特開平11−246184号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
本発明は上述の点に鑑みてなされたもので、電気チェーンブロックのトルク電流から、巻上運転開始後短時間で、且つ精度良く荷重の判別ができる電気チェーンブロックの荷重判別装置、及び荷重判別方法を提供することを目的とする。
【課題を解決するための手段】
【0009】
上記の課題を解決するために、本発明は、巻上下電動機、該巻上下電動機に駆動電力を供給するインバータ制御装置を備え、巻上下電動機によりシーブを回動させ、該シーブに係合するチェーンを巻上下する電気チェーンブロックの荷重判別装置であって、インバータ制御装置から巻上下電動機に供給されるモータ電流を検出するモータ電流検出手段と、検出したモータ電流からベクトル演算によりトルク電流を算出するトルク電流算出手段と、算出したトルク電流の電気チェーンブロックの巻上速度に応じた直前の所定期間の平均値を連続して算出する移動平均トルク電流値算出手段と、移動平均トルク電流値を設定閾値と比較し巻上荷重値が所定超過荷重値を超えているか否かを判定する荷重判定手段を備えたことを特徴とする。
【0010】
また、本発明は、上記電気チェーンブロックの荷重判別装置において、移動平均トルク電流値算出手段の所定期間は、電気チェーンブロックのトルク電流の変動周期を算出するトルク電流変動周期算出手段によって算出することを特徴とする。
【0011】
また、本発明は、上記電気チェーンブロックの荷重判別装置において、トルク電流変動周期算出手段は高速巻上時及び低速巻上時のトルク電流変動周期を算出できるようになっており、移動平均トルク電流値算出手段は高速巻上時及び低速巻上時の移動平均トルク電流を算出できるようになっており、荷重判定手段は高速巻上時と低速巻上時では、それぞれ異なる値の閾値を設定し、高速巻上時と低速巻上時でそれぞれ巻上荷重値が所定超過荷重値を超えているか否かを判定することを特徴とする。
【0012】
また、巻上下電動機、該巻上下電動機に駆動電力を供給するインバータ制御装置を備え、巻上下電動機によりシーブを回動させ、該シーブに係合するチェーンを巻上下する電気チェーンブロックの荷重判別方法であって、インバータ制御装置から巻上下電動機に供給されるモータ電流を検出し、該検出したモータ電流からベクトル演算によりトルク電流を算出し、トルク電流の電気チェーンブロックの巻上速度に応じた直前の所定期間の平均値を連続して算出し移動平均トルク電流値となし、移動平均トルク電流値を設定閾値と比較し巻上荷重値が所定超過荷重値を超えているか否かを判断して荷重判別を行うことを特徴とする。
【0013】
また、上記電気チェーンブロックの荷重判別方法において、電気チェーンブロックの巻上速度からチェーンの2リンク分を巻き上げる時間を算出し移動平均トルク電流値を算出する所定期間とすることを特徴とする。
【0014】
また、上記電気チェーンブロックの荷重判別方法において、トルク電流の算出は高速巻上時と低速巻上時に行い、移動平均トルク電流値を算出する所定期間は、高速巻上時と低速巻上時と別々に設定し、移動平均トルク電流値の算出は高速巻上時と低速巻上時に行い、高速巻上時の移動平均トルク電流値と設定閾値を比較し巻上荷重値が所定超過荷重値を超えているか否かを判断すると共に、低速巻上時の移動平均トルク電流値と設定閾値を比較し巻上荷重値が所定超過荷重値を超えているか否かを判断して荷重判別を行うことを特徴とする。
【0015】
また、上記電気チェーンブロックの荷重判別方法において、高速時の荷重判別は起動トルク電流が終了してから行い、低速時の荷重判別は起動電流が終了する前から行うことを特徴とする。
【発明の効果】
【0016】
本発明は、電気チェーンブロックの変動するトルク電流の移動平均トルク電流値を算出して荷重判別を行うものであって、直前のチェーンの2リンク分を巻き上げる期間の平均トルク電流値を連続して算出して移動平均トルク電流値となし、予め設定された閾値と該移動平均値トルク電流値を比較して荷重判別を行うので、電気チェーンブロックの巻上運転開始後短時間で、且つ精度良く荷重の判別ができる。
【図面の簡単な説明】
【0017】
【図1】インバータ駆動の電気チェーンブロックの概略構成を示す図である。
【図2】電気チェーンブロックのモータ電流の励磁電流とトルク電流の関係を示す図である。
【図3】電気チェーンブロックのシーブの回転によるチェーンの中心線の揺動状態を示す図である。
【図4】電気チェーンブロックの低速巻上運転でのトルク電流の変化を示す図である。
【図5】電気チェーンブロックの高速巻上運転でのトルク電流の変化を示す図である。
【図6】低速時のトルク電流と巻上げ速度変動を示す図である。
【図7】高速時のトルク電流と巻上げ速度変動を示す図である。
【図8】低速時の平均トルク電流の変化を示す図である。
【図9】低速時の平均トルク電流の変化を示す図である。
【図10】本発明に係る電気チェーンブロックの上記荷重判別の処理フローを示す図である。
【図11】本発明に係る荷重判別装置を備えたインバータ駆動の電気チェーンブロックの概略構成を示す図である。
【発明を実施するための形態】
【0018】
以下、本発明の実施の形態について、詳細に説明する。本発明に係る荷重判別装置、及び荷重判別方法を実施する電気チェーンブロックの概略構成は図1と同一であるから、その図示と説明は省略する。図1に示すような、電気チェーンブロックにおいて、インバータ制御装置11から巻上下電動機12に供給されるモータ電流はベクトル演算により、図2に示すように、励磁電流とトルク電流に分割できる。このトルク電流は巻上下電動機12の負荷(ここでは吊り上げ荷重18の大きさ)に比例するから、このトルク電流を電気チェーンブロックの設定許容値(閾値)と比較し、トルク電流が閾値を超えているか否によって、過負荷状態か否を判別できる。
【0019】
電気チェーンブロックの吊上げ荷重について、定格荷重(定格負荷)までは確実に巻上げ、定格荷重の1.08倍を超えると自動的に巻上を停止しなければならないという要求がある。ところが、図4及び図5に示すように、電気チェーンブロックの巻上運転でのトルク電流は同じ荷重でも周期的に変動し、巻上なければならない定格荷重(1.0W)と巻上を禁止する荷重(1.08W)との間に適正な閾値を設定できないという問題、特に起動時は1.0W時のトルク電流と1.08W時のトルク電流は重複する範囲にあるため、トルク電流での精度の良い荷重判定ができない。
【0020】
ところで、トルク電流の変動と巻上速度の変動を低速の場合と、高速の場合で見ると、それぞれ図6、図7のようになる。図示するように、低速巻上でも高速巻上でも所定周期T(Tdl,Tdh)で速度が変動し、この速度変動と同じ周期T(Tdl,Tdh)でトルク電流が変動していることが分かる。この周期Tは縦リンク16aと横リンク16bの1組をシーブ15で巻き上げる時間と一致している。ここで各周期Tを基準とする移動平均電流値をとると、図8及び図9の曲線C、Dに示すようになる。即ち曲線Cは1.0W時のトルク電流の移動平均を、曲線Dは1.08W時のトルク電流の移動平均をそれぞれ示す。図8及び図9に示すように、起動時から所定期間を除くと、曲線CとDは明確に区分され、この間に所定閾値を設定することにより、巻上下電動機12の負荷、即ち荷重18がこの閾値を超えたか否かを高精度で判別することが可能となる。
【0021】
ここで、図8の低速時の移動平均トルク電流値の変化を示す図の移動平均トルク電流値の算出方法を説明する。F:インバータ制御装置11の出力周波数(Hz)、P:巻上下電動機12の極数、e:巻上下電動機12のすべり率、N:巻上下電動機12の回転数(rpm)、S:シーブ15の回転数(rpm)、M:減速機13の減速比、K:シーブ15の角数、T:図3に示すようにチェーンを2リンクの長さ2Lc分巻き上げる時間(sec)とすると、
N=120×F/P×(1−e) (1)
S=N×M (2)
T=60/S/K (3)
式(1),(2),(3)より
T=P/{2×F×(1−e)×M×K} (4)
となる。
【0022】
F=5Hz(低速時出力周波数)、P=4、e=0.05、M=0.06、K=5とすると、式(4)より変動周期Tは、1.404秒となる。インバータ制御装置11のベクトル演算によって10ミリ秒ごとに算出(サンプリング)したトルク電流値を書き換えながら最新の所定個をメモリに格納するものとすると、メモリに格納したトルク電流値のなかの直前の141個(1.404/0.010=140.4)のトルク電流値の平均値を算出して移動平均トルク電流値とする。図8はトルク電流値を算出(サンプリング)するごと(10ミリ秒ごと)にこの移動平均トルク電流値を連続して算出しグラフ化したものである。なお、起動時点から変動周期T(1.404秒)に満たない期間の移動平均トルク電流値も起動時からのトルク電流値の積算値を変動周期Tをサンプリング間隔(10ミリ秒)で割った数(141)で割り算して算出している。
【0023】
次に図9の高速時の移動平均トルク電流値の変化を示す図の移動平均トルク電流値の算出方法を説明する。低速時と同様に、インバータ制御装置11のベクトル演算によって10ミリ秒ごとに算出(サンプリング)したトルク電流値を書き換えながら、最新の所定個をメモリに格納する。F=60Hz(高速時出力周波数)、P=4、e=0.05、M=0.06、K=5とすると、式(4)より変動周期Tは0.117秒となる。メモリに格納したトルク電流値のなかの直前の12個(0.117/0.010=11.7)の平均値を算出して移動平均トルク電流値とする。図9はトルク電流値を算出(サンプリング)するごと(10ミリ秒ごと)にこの移動平均トルク電流値を連続して算出しグラフ化したものである。なお、起動時点から変動周期T(0.117秒)に満たない期間の移動平均トルク電流値も起動時からのトルク電流値の積算値を変動周期Tをサンプリング間隔(10ミリ秒)で割った数(12)で割り算して算出している。
【0024】
近年、インバータ駆動の電気チェーンブロックにおいて、インバータ制御装置11から巻上下電動機12に供給されるモータ電流をベクトル演算により、図2に示すように励磁電流とトルク電流に分割し、負荷(荷重18)に見合ったモータ電流を流せるように電圧の補正を行うことによって低速で高トルクを得られるように構成した電気チェーンブロックがある。この電気チェーンブロックではインバータ制御装置11に巻上下電動機12に供給されるモータ電流を検出し、該モータ電流をベクトル演算により、励磁電流とトルク電流に分割する機能を備えている。そこで、このインバータ制御装置11に上記(1)〜(4)によりトルク電流変動の周期Tを算出する機能と、この周期Tに相当する時間を基準とする移動平均トルク電流値を算出する機能と、この移動平均トルク電流値と設定閾値を比較することにより荷重18が過負荷状態にあるか否かを判別する荷重判別機能を持たせることにより、短時間で且つ高精度に荷重判別が可能となる。
【0025】
図9の高速時の移動平均トルク値では、1.0Wの移動平均トルク電流値を表す曲線Cは、起動時において、1.08Wの移動平均トルク電流値を表す曲線Dの平坦部の値を超えているが、図8の低速時の移動平均トルク値では、1.0Wの移動平均トルク電流値を表す曲線Cは、起動時においても、1.08Wの移動平均トルク電流値を表す曲線Dの平坦部(安定部)の値を超えていないので、閾値をこの曲線Dの平坦部(安定部)より所定量小さい値と1.0Wの移動平均トルク電流値を表す曲線Cの最高値との間の値とすることで、起動時から起動電流が終了していなくとも移動平均トルク値は、荷重が1.0W以下であれば閾値を超えることはなく、1.0Wの荷重を超過荷重と誤認することはない。一方、高速時においては、起動時の所定時間Tnh終了後に判別を開始するものとすれば、1.0Wの荷重を超過荷重と誤認することはない。
【0026】
上記の例では、変動周期Tの1周期を移動平均トルク電流値の算出基準としたが、変動周期Tの整数倍を基準とする移動平均トルク電流値を用いれば、更にトルク電流値を平滑化して判別の精度が向上するが、1周期を基準とする方法と比べ過負荷の検知が遅くなるので、1周期分を基準とする移動平均トルク電流値を判別基準とするのが最良である。
【0027】
上記(1)〜(4)式において、変動周期Tは、インバータ制御装置11が巻上下電動機に出力する出力周波数によって算出し設定するようにしているが、巻上下電動機12の出力軸の回転数、又はシーブ15の回転数、又は減速機13の歯車軸等の回転数を計測して、或いはチェーン16の2リンク分を巻き上げるのに要する時間を逐次計測することによって、変動周期を算出するようにしても良いが、電動巻上装置に供給する出力周波数から巻上下電動機12の回転数を算出する方法が簡便でかつ十分精度を有している。或いは、電気チェーンブロックに予め設定された速度に応じた変動周期をメモリに記憶し、指令速度に応じた変動周期をメモリから読み出し、変動周期(移動平均トルク電流値を算出する基準期間:平均値を算出するサンプリング数)に設定するようにしても良い。
【0028】
図10は上記荷重判別の処理フローを示す図である。先ず電気チェーンブロックの電源を投入し、ステップST1において、高速運転でのトルク電流の変動周期である高速変動周期(Tdh)と低速運転でのトルク電流の変動周期である低速変動周期(Tdl)を上記(1)〜(4)式により算出して設定し、ステップST2に移行する。ステップST2では、操作ボックス14から巻上操作信号があるかを判断し、Yesの場合ステップST3に移行する。ステップST2においてNoの場合にはサンプリングし所定数メモリに記憶したトルク電流値をリセットすることが好ましい。ステップST3では、トルク電流のサンプリング(測定・算出)を開始し、ステップST4に移行する。ステップST4では、運転信号が高速か低速かを判断し、低速の場合はステップST5に移行し、高速の場合はステップST8に移行する。
【0029】
ステップST5では、低速変動周期Tdlを基準とする移動平均トルク電流値Dlを算出し、ステップST6に移行する。ステップST6では、低速運転時間が低速起動電流無視時間Tnl(図8参照)を越えたか(低速運転時間>Tnl)を判断し、Noの場合は前記ステップST2に戻り、Yesの場合はステップST7に移行する。ステップST7では、ステップST5で算出した移動平均トルク電流平均値Dlが低速時移動平均閾値Hl以上(Dl>Hl)かを判断し、Noの場合は前記ステップST2に戻り、Yesの場合はステップST11に移行し、巻上停止を行う。
【0030】
前記ステップST8では、高速変動周期Td hを基準とする移動平均トルク電流値Dhを算出し、ステップST9に移行する。ステップST9では、高速運転時間が高速起動電流無視時間Tnh(図9参照)を越えたか(高速運転時間>Tnh)を判断し、Noの場合は前記ステップST2に戻り、Yesの場合はステップST10に移行する。ステップST10では、ステップST8で算出した移動平均トルク電流値Dhが高速時移動平均閾値Hh以上(Dh>Hh)を判断し、Noの場合は前記ステップST2に戻り、Yesの場合はステップST11に移行し、巻上停止を行う。なお、上記低速起動電流無視時間Tnl、及び高速起動電流無視時間Tnhは起動電流が小さくなり平均閾値により過負荷荷重を判別できる最短時間に設定することにより、巻上運転開始後最短時間で高精度の荷重判別が可能となる。前述の通り図8に示す様な場合には、Tnlを0とすることができる。
【0031】
ステップST11で巻上停止を行ったらステップST12に移行し、該ステップST12でリセット操作があるか否かを判断し、Noであったらリセット操作を待ち、YesであったらステップST2にもどる。リセット操作は、非常停止ボタン又は巻下用ボタン14bの押下げにより行われる。
【0032】
なお、上記実施形態例では、インバータ制御装置11から巻上下電動機12に供給されるモータ電流の検出、該モータ電流をベクトル演算により励磁電流とトルク電流に分割する処理、上記(1)〜(4)式によりトルク電流変動の周期Tを算出、周期Tを基準とする移動平均トルク電流値を算出、移動平均トルク電流値と設定閾値を比較等の処理をインバータ制御装置で行うようになっているがこれに限定されるものではない。例えば図11に示すようにインバータ制御装置11とは別に荷重判別部20を設け、該荷重判別部20に電流検出素子21で検出したモータ電流、インバータ制御装置11から高速,低速時のトルク電流の変動周期Tdh,Tdlを入力する。そして荷重判別部20でベクトル演算により高速,低速時のモータ電流から高速,低速時トルク電流を算出し、該高速,低速時トルク電流を高速,低速時のトルク電流変動周期Tdh,Tdlを基準とする、高速,低速時の移動平均トルク電流値を算出し、これと設定閾値を比較し、高速,低速時の移動平均トルク電流値が閾値を超えたら、過負荷と判断し、警報部22に過負荷信号を出力し、警報を発したり、インバータ制御装置11に停止信号Sを送るようにしてもよい。
【0033】
以上、本発明の実施形態を説明したが、本発明は上記実施形態に限定されるものではなく、特許請求の範囲、及び明細書、図面に記載された技術的思想の範囲内において種々の変形が可能である。
【産業上の利用可能性】
【0034】
本発明は、インバータから巻上下電動機に供給されるモータ電流を検出するモータ電流検出手段と、該検出したモータ電流からベクトル演算によりトルク電流を算出するトルク電流算出手段と、該トルク電流の変動周期を算出するトルク電流変動周期算出手段と、トルク電流平均値をトルク電流の変動周期間のサンプリングデータから算出する平均トルク電流値算出手段と、平均トルク電流値を設定閾値と比較し巻上荷重値が所定超過荷重値を超えているか否かを判定する荷重判定手段を備えたので、巻上運転始動時短時間で、且つ精度良く荷重の判別ができる電気チェーンブロックの荷重判別装置として利用することができる。
【符号の説明】
【0035】
11 インバータ制御装置
12 巻上下電動機
13 減速機
14 操作ボックス
15 シーブ
16 チェーン
17 フック
18 荷重
20 荷重判別部
21 電流検出素子
22 警報部
【特許請求の範囲】
【請求項1】
巻上下電動機、該巻上下電動機に駆動電力を供給するインバータ制御装置を備え、巻上下電動機によりシーブを回動させ、該シーブに係合するチェーンを巻上下する電気チェーンブロックの荷重判別装置であって、
前記インバータ制御装置から前記巻上下電動機に供給されるモータ電流を検出するモータ電流検出手段と、
前記検出したモータ電流からベクトル演算によりトルク電流を算出するトルク電流算出手段と、
前記算出したトルク電流の前記電気チェーンブロックの巻上速度に応じた直前の所定期間の平均値を連続して算出する移動平均トルク電流値算出手段と、
前記移動平均トルク電流値を設定閾値と比較し巻上荷重値が所定超過荷重値を超えているか否かを判定する荷重判定手段を備えたことを特徴とする電気チェーンブロックの荷重判別装置。
【請求項2】
請求項1に記載の電気チェーンブロックの荷重判別装置において、
前記移動平均トルク電流値算出手段の所定期間は、前記電気チェーンブロックのトルク電流の変動周期を算出するトルク電流変動周期算出手段によって算出することを特徴とする電気チェーンブロックの荷重判別装置。
【請求項3】
請求項1又は2に記載の電気チェーンブロックの荷重判別装置において、
前記トルク電流変動周期算出手段は高速巻上時及び低速巻上時のトルク電流変動周期を算出できるようになっており、前記移動平均トルク電流値算出手段は高速巻上時及び低速巻上時の移動平均トルク電流を算出できるようになっており、前記荷重判定手段は高速巻上時と低速巻上時では、それぞれ異なる値の閾値を設定し、高速巻上時と低速巻上時でそれぞれ巻上荷重値が所定超過荷重値を超えているか否かを判定することを特徴とする電気チェーンブロックの荷重判別装置。
【請求項4】
巻上下電動機、該巻上下電動機に駆動電力を供給するインバータ制御装置を備え、巻上下電動機によりシーブを回動させ、該シーブに係合するチェーンを巻上下する電気チェーンブロックの荷重判別方法であって、
前記インバータ制御装置から前記巻上下電動機に供給されるモータ電流を検出し、該検出したモータ電流からベクトル演算によりトルク電流を算出し、
前記トルク電流の前記チェーンブロックの巻上速度に応じた直前の所定期間の平均値を連続して算出し移動平均トルク電流値となし、
前記移動平均トルク電流値を設定閾値と比較し巻上荷重値が所定超過荷重値を超えているか否かを判断して荷重判別を行うことを特徴とする電気チェーンブロックの荷重判別方法。
【請求項5】
請求項4に記載の電気チェーンブロックの荷重判別方法において、
前記電気チェーンブロックの巻上速度から前記チェーンの2リンク分を巻き上げる時間を算出し前記移動平均トルク電流値を算出する前記所定期間とすることを特徴とする電気チェーンブロックの荷重判別方法。
【請求項6】
請求項4又は5に記載の電気チェーンブロックの荷重判別方法において、
前記トルク電流の算出は高速巻上時と低速巻上時に行い、前記移動平均トルク電流値を算出する所定期間は、高速巻上時と低速巻上時で別々に設定し、
前記移動平均トルク電流値の算出は高速巻上時と低速巻上時に行い、
前記高速巻上時の前記移動平均トルク電流値と設定閾値を比較し巻上荷重値が所定超過荷重値を超えているか否かを判断すると共に、前記低速巻上時の移動平均トルク電流値と設定閾値を比較し巻上荷重値が所定超過荷重値を超えているか否かを判断して荷重判別を行うことを特徴とする電気チェーンブロックの荷重判別方法。
【請求項7】
請求項6に記載の電気チェーンブロックの荷重判別方法において、
前記高速時の荷重判別は起動トルク電流が終了してから行い、低速時の荷重判別は起動電流が終了する前から行うことを特徴とする電気チェーンブロックの荷重判別方法。
【請求項1】
巻上下電動機、該巻上下電動機に駆動電力を供給するインバータ制御装置を備え、巻上下電動機によりシーブを回動させ、該シーブに係合するチェーンを巻上下する電気チェーンブロックの荷重判別装置であって、
前記インバータ制御装置から前記巻上下電動機に供給されるモータ電流を検出するモータ電流検出手段と、
前記検出したモータ電流からベクトル演算によりトルク電流を算出するトルク電流算出手段と、
前記算出したトルク電流の前記電気チェーンブロックの巻上速度に応じた直前の所定期間の平均値を連続して算出する移動平均トルク電流値算出手段と、
前記移動平均トルク電流値を設定閾値と比較し巻上荷重値が所定超過荷重値を超えているか否かを判定する荷重判定手段を備えたことを特徴とする電気チェーンブロックの荷重判別装置。
【請求項2】
請求項1に記載の電気チェーンブロックの荷重判別装置において、
前記移動平均トルク電流値算出手段の所定期間は、前記電気チェーンブロックのトルク電流の変動周期を算出するトルク電流変動周期算出手段によって算出することを特徴とする電気チェーンブロックの荷重判別装置。
【請求項3】
請求項1又は2に記載の電気チェーンブロックの荷重判別装置において、
前記トルク電流変動周期算出手段は高速巻上時及び低速巻上時のトルク電流変動周期を算出できるようになっており、前記移動平均トルク電流値算出手段は高速巻上時及び低速巻上時の移動平均トルク電流を算出できるようになっており、前記荷重判定手段は高速巻上時と低速巻上時では、それぞれ異なる値の閾値を設定し、高速巻上時と低速巻上時でそれぞれ巻上荷重値が所定超過荷重値を超えているか否かを判定することを特徴とする電気チェーンブロックの荷重判別装置。
【請求項4】
巻上下電動機、該巻上下電動機に駆動電力を供給するインバータ制御装置を備え、巻上下電動機によりシーブを回動させ、該シーブに係合するチェーンを巻上下する電気チェーンブロックの荷重判別方法であって、
前記インバータ制御装置から前記巻上下電動機に供給されるモータ電流を検出し、該検出したモータ電流からベクトル演算によりトルク電流を算出し、
前記トルク電流の前記チェーンブロックの巻上速度に応じた直前の所定期間の平均値を連続して算出し移動平均トルク電流値となし、
前記移動平均トルク電流値を設定閾値と比較し巻上荷重値が所定超過荷重値を超えているか否かを判断して荷重判別を行うことを特徴とする電気チェーンブロックの荷重判別方法。
【請求項5】
請求項4に記載の電気チェーンブロックの荷重判別方法において、
前記電気チェーンブロックの巻上速度から前記チェーンの2リンク分を巻き上げる時間を算出し前記移動平均トルク電流値を算出する前記所定期間とすることを特徴とする電気チェーンブロックの荷重判別方法。
【請求項6】
請求項4又は5に記載の電気チェーンブロックの荷重判別方法において、
前記トルク電流の算出は高速巻上時と低速巻上時に行い、前記移動平均トルク電流値を算出する所定期間は、高速巻上時と低速巻上時で別々に設定し、
前記移動平均トルク電流値の算出は高速巻上時と低速巻上時に行い、
前記高速巻上時の前記移動平均トルク電流値と設定閾値を比較し巻上荷重値が所定超過荷重値を超えているか否かを判断すると共に、前記低速巻上時の移動平均トルク電流値と設定閾値を比較し巻上荷重値が所定超過荷重値を超えているか否かを判断して荷重判別を行うことを特徴とする電気チェーンブロックの荷重判別方法。
【請求項7】
請求項6に記載の電気チェーンブロックの荷重判別方法において、
前記高速時の荷重判別は起動トルク電流が終了してから行い、低速時の荷重判別は起動電流が終了する前から行うことを特徴とする電気チェーンブロックの荷重判別方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【公開番号】特開2012−162327(P2012−162327A)
【公開日】平成24年8月30日(2012.8.30)
【国際特許分類】
【出願番号】特願2010−69013(P2010−69013)
【出願日】平成22年3月24日(2010.3.24)
【出願人】(000129367)株式会社キトー (101)
【公開日】平成24年8月30日(2012.8.30)
【国際特許分類】
【出願日】平成22年3月24日(2010.3.24)
【出願人】(000129367)株式会社キトー (101)
[ Back to top ]