
電気モータ用のブラシ摩耗判定装置
【課題】電気モータ用のブラシ摩耗判定装置において、環境温度による誤判定を抑制する。
【解決手段】電気モータ用のブラシ摩耗判定装置は、電気モータを始動させた瞬間に当該電気モータに流れている電流である始動電流を検出する始動電流検出手段(ステップ104)と、電気モータ始動後の所定の低負荷及び定回転状態において当該電気モータに流れている電流である定常電流を検出する定常電流検出手段(ステップ110)と、始動電流検出手段により検出された始動電流から定常電流検出手段により検出された定常電流を差し引いた値が所定の閾電流値より小さい場合に、ブラシの摩耗量が限界量に達したことを判定するブラシ摩耗判定手段(ステップ112〜116)と、を備えている。
【解決手段】電気モータ用のブラシ摩耗判定装置は、電気モータを始動させた瞬間に当該電気モータに流れている電流である始動電流を検出する始動電流検出手段(ステップ104)と、電気モータ始動後の所定の低負荷及び定回転状態において当該電気モータに流れている電流である定常電流を検出する定常電流検出手段(ステップ110)と、始動電流検出手段により検出された始動電流から定常電流検出手段により検出された定常電流を差し引いた値が所定の閾電流値より小さい場合に、ブラシの摩耗量が限界量に達したことを判定するブラシ摩耗判定手段(ステップ112〜116)と、を備えている。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、電気モータ用のブラシ摩耗判定装置に関するものである。
【背景技術】
【0002】
電気モータ用のブラシ摩耗判定装置の一形式として、特許文献1に示されているものが知られている。特許文献1の図1に示されているように、電気モータ用のブラシ摩耗判定装置は、電源10と、ブラシモータ30と、液圧ポンプ50と、アクチュエータ70と、リリーフ弁60と、を備える車載用液圧装置100a(100b)において、前記車載用液圧装置は、前記ブラシモータのモータ電流(ブラシ温度)を検出する電流センサ80a(温度センサ80b)と、前記ブラシモータのブラシの寿命終期を検知するブラシ摩耗検知装置90と、を更に備え、前記ブラシ摩耗検知装置は、前記リリーフ弁による圧力の制限中、前記電流センサ(温度センサ)により検出した電流(温度)と基準電流(基準温度)との比較に基づき、前記ブラシモータのブラシの寿命終期を検知するように構成されている。
【0003】
電気モータ用のブラシ摩耗判定装置においては、特許文献1の図3(a)に示されているように、ブラシモータのブラシが寿命終期を迎える以前では、リリーフ状態におけるモータ電流の値は、ブラシとコミュテータとの接触状態の影響を受けて若干変動はするが、比較的小さい変動幅aの範囲内において概ね一定の値で推移する。
【0004】
一方、特許文献1の図3(b)に示されているように、ブラシモータのブラシが寿命終期を迎えた以後においては、リリーフ状態におけるモータ電流の値は、ブラシとコミュテータとの接触状態の悪化の影響を受けて、変動幅aを大きく超える変動幅bの範囲内で経時的に変動する。このモータ電流の変動幅の増加は、ブラシモータのブラシが寿命終期に近付くと、ブラシの表面が荒れることにより、ブラシとコミュータとの接触状態が悪化して、コミュータとブラシとの間に異常なアークが発生することに起因する。
【0005】
そこで、車載用液圧装置100aの始業前点検時等において、リリーフ状態におけるモータ電流を検出して、その検出したモータ電流の値の変動幅が所定の変動閾値以上となる場合、ブラシモータ30のブラシが寿命終期を迎えたと判定するようになっている。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2008−301567号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
上述した特許文献1に記載の電気モータ用のブラシ摩耗判定装置においては、ブラシが寿命終期を迎えたと判定することはできる。しかし、検出されるモータ電流の値は、モータの抵抗値および配線抵抗で決定され、それらの抵抗値や環境温度(雰囲気温度)のばらつきによって変動するものである。よって、上記抵抗値の変動に起因してブラシの寿命終期を誤検出するおそれがあった。
【0008】
そこで、本発明は、上述した問題を解消するためになされたもので、電気モータ用のブラシ摩耗判定装置において、環境温度による誤判定を抑制することを目的とする。
【課題を解決するための手段】
【0009】
上記の課題を解決するため、請求項1に係る発明の構成上の特徴は、車両に搭載されるブラシ付きの電気モータに適用され、ブラシの摩耗量が所定の限界量に達したことを判定する電気モータ用のブラシ摩耗判定装置において、電気モータを始動させた瞬間に当該電気モータに流れている電流である始動電流を検出する始動電流検出手段と、電気モータ始動後の所定の低負荷及び定回転状態において当該電気モータに流れている電流である定常電流を検出する定常電流検出手段と、始動電流検出手段により検出された始動電流から定常電流検出手段により検出された定常電流を差し引いた値が所定の閾電流値より小さい場合に、ブラシの摩耗量が限界量に達したことを判定するブラシ摩耗判定手段と、を備えていることである。
【0010】
請求項2に係る発明の構成上の特徴は、始動電流検出手段および定常電流検出手段は、電気モータに流れている電流を検出するための共通の電流検出センサを有して構成され、電流検出センサの検出値に基づいてそれぞれ始動電流および定常電流を検出することである。
【0011】
請求項3に係る発明の構成上の特徴は、請求項1または請求項2において、電気モータの始動からの経過時間を計時する計時手段を備え、定常電流検出手段は、計時手段により計時された計時時間が所定時間となったタイミングにおいて電気モータに流れている電流を定常電流として検出することである。
【0012】
請求項4に係る発明の構成上の特徴は、請求項1または請求項2において、車両のイニシャルチェックの開始に係る所定のタイミングからの経過時間を計時する計時手段を備え、定常電流検出手段は、計時手段により計時された計時時間が所定時間となったタイミングにおいて電気モータに流れている電流を定常電流として検出することである。
【発明の効果】
【0013】
上記のように構成した請求項1に係る発明においては、始動電流検出手段が、電気モータを始動させた瞬間に当該電気モータに流れている電流である始動電流を検出する。定常電流検出手段が、電気モータ始動後の所定の低負荷及び定回転状態において当該電気モータに流れている電流である定常電流を検出する。そして、ブラシ摩耗判定手段が、始動電流検出手段により検出された始動電流から定常電流検出手段により検出された定常電流を差し引いた値が所定の閾電流値より小さい場合に、ブラシの摩耗量が限界量に達したことを判定する。
【0014】
詳しくは、電気モータの通電可能なブラシの数が摩耗などによって減少すると、電気モータの通電可能なブラシの数が減少する前と比較して、電気モータを始動させた瞬間に流れている電流である始動電流が低下する。また、電気モータ始動後の所定の低負荷および定回転状態で当該電気モータに流れている電流である定常電流は、低負荷であるため、電気モータの通電可能なブラシが減少しても、電気モータの通電可能なブラシの数が減少する前と比較してもほとんど差がない。
【0015】
ここで、定常電流は始動電流と同様の温度依存性を有する。よって、環境温度による変動があっても、定常電流と始動電流とは同様に変動するため環境温度による変動をキャンセルできる。したがって、始動電流から定常電流を差し引いた値に基づくブラシ摩耗判定手段による判定により、ブラシ摩耗量の限界を精度よく行うことができる。これにより、電気モータ用のブラシ摩耗判定装置において、環境温度のばらつきによる誤判定を抑制することができる。
【0016】
また、上記のように構成した請求項2に係る発明においては、始動電流と定常電流とが共通の電流検出センサの検出値に基づいて検出されるため、電流検出センサの検出ばらつきや電源電圧の変動があっても、検出される定常電流と始動電流とは同様に変動するため電流検出センサの検出ばらつきや電源電圧の変動をキャンセルできる。よって、上記始動電流から定常電流を差し引いた値に基づくブラシ摩耗判定手段による判定により、ブラシ摩耗量の限界を精度よく行うことができる。これにより、電気モータ用のブラシ摩耗判定装置において、電流検出センサの検出ばらつきや電源電圧の変動による誤判定を抑制することができる。
【0017】
電気モータは、電気モータの始動から所定時間経過後に低負荷および定回転状態となる場合がある。そこで、上記のように構成した請求項3に係る発明においては、電気モータの始動からの経過時間を計時する計時手段を備え、定常電流検出手段は、計時手段により計時された計時時間が所定時間となったタイミングにおいて電気モータに流れている電流を定常電流として検出する。これにより、電気モータの低負荷および定回転状態を検出することなく(専用の検出装置を設けることなく)、定常電流を検出することができ、電気モータ用のブラシ摩耗判定装置を簡素に構成することができる。
【0018】
車両に搭載されている電気モータはイニシャルチェックにおいて始動される。また、その電気モータにイニシャルチェックが適用される場合には、電気モータはイニシャルチェックに係る所定のタイミングから所定時間経過後に低負荷および定回転状態となる。そこで、上記のように構成した請求項4に係る発明においては、車両のイニシャルチェックの開始に係る所定のタイミングからの経過時間を計時する計時手段を備え、定常電流検出手段は、計時手段により計時された計時時間が所定時間となったタイミングにおいて電気モータに流れている電流を定常電流として検出する。これにより、電気モータの低負荷および定回転状態を検出することなく(専用の検出装置を設けることなく)、定常電流を検出することができ、電気モータ用のブラシ摩耗判定装置を簡素に構成することができる。
【図面の簡単な説明】
【0019】
【図1】本発明による電気モータ用のブラシ磨耗判定装置を適用した液圧ブレーキ装置の一実施形態を示す概要図である。
【図2】本発明による電気モータ用のブラシ磨耗判定装置を示す概要図である。
【図3】図1に示すポンプ用モータ(電気モータ)を示す断面図である。
【図4】図3に示すアーマチュアにおけるアーマチュアコイル(コイル)の巻線展開図である。
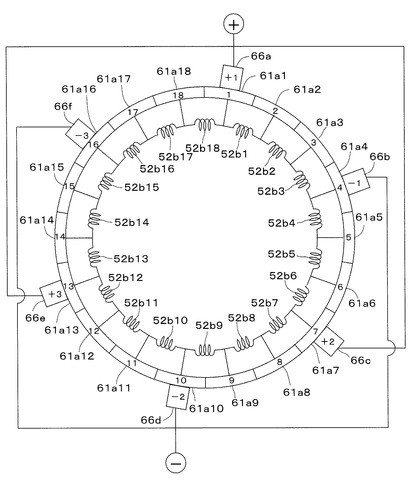
【図5】電気モータにおいて、第1〜第6ブラシが、第1,4,7,10,13,16コンミテータ片にそれぞれ接している場合の一例を示す図である。
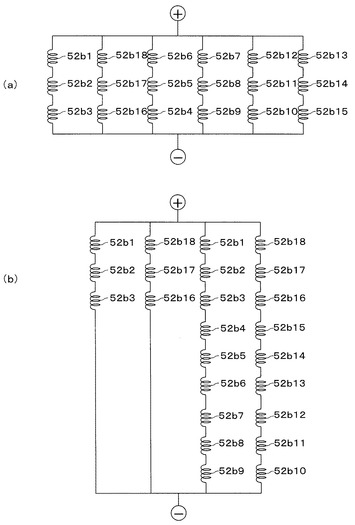
【図6】(a)は、第1〜第6ブラシの全てのブラシが通電可能な状態である場合の電気モータ内の回路図であり、(b)は、第1〜第6ブラシのうち第3、第5ブラシが通電不能な状態である場合の電気モータ内の回路図である。
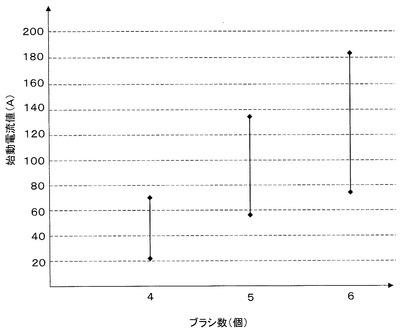
【図7】通電可能なブラシの数と始動電流値との関係を示す図である。
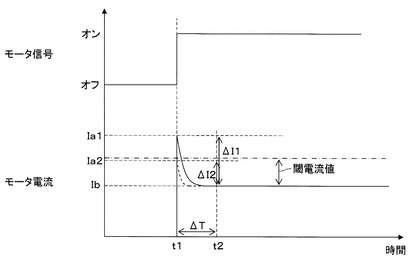
【図8】本発明による電気モータ用のブラシ磨耗判定装置の作用効果を説明するためのタイムチャートである。
【図9】通電可能なブラシの数を変化させたときの、モータトルクとモータ回転速度との関係、およびモータトルクとモータ電流との関係を示す図である。
【図10】図1に示すブレーキECUにて実行される制御プログラムのフローチャートの一例である。
【図11】図1に示すブレーキECUにて実行される制御プログラムのフローチャートの一例である。
【発明を実施するための形態】
【0020】
以下、本発明に係る電気モータ用のブラシ磨耗判定装置を液圧ブレーキ装置に適用した一実施形態を図面を参照して説明する。図1は液圧ブレーキ装置の構成を示す概要図であり、図2はポンプ用モータ24bの駆動を制御する駆動制御回路40を示す図である。
【0021】
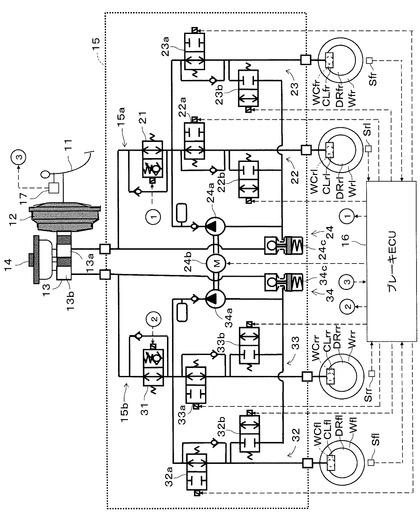
液圧ブレーキ装置は、車両を制動させるためのものであり、図1に示すように、各ホイールシリンダWCfl,WCfr,WCrl,WCrr、ブレーキ操作部材であるブレーキペダル11、真空式制動倍力装置12、マスタシリンダ13、リザーバタンク14、液圧自動発生装置であるブレーキアクチュエータ15、およびブレーキECU16を備えている。
【0022】
各ホイールシリンダWCfl,WCfr,WCrl,WCrrは、各車輪Wfl,Wfr,Wrl,Wrrの回転をそれぞれ規制するものであり、各キャリパCLfl,CLfr,CLrl,CLrrに設けられている。各ホイールシリンダWCfl,WCfr,WCrl,WCrrに基礎液圧および制御液圧の少なくともいずれかが供給されると、各ホイールシリンダWCfl,WCfr,WCrl,WCrrの各ピストン(図示省略)が摩擦部材である一対のブレーキパッド(図示省略)を押圧して各車輪Wfl,Wfr,Wrl,Wrrと一体回転する回転部材であるディスクロータDRfl,DRfr,DRrl,DRrrを両側から挟んでその回転を規制するようになっている。なお、本実施形態においては、ディスク式ブレーキを採用するようにしたが、ドラム式ブレーキを採用するようにしてもよい。
【0023】
真空式制動倍力装置12は、エンジンの吸気負圧をダイヤフラムに作用させてブレーキペダル11の踏み込み操作により生じるブレーキ操作力を助勢して倍力(増大)する倍力装置である
【0024】
マスタシリンダ13は、ドライバによるブレーキペダル11の操作力を変換して基礎液圧を形成し、その基礎液圧によって車輪Wfl,Wfr,Wrl,Wrrに摩擦制動力を発生させ得る装置である。本実施形態では、マスタシリンダ13は、真空式制動倍力装置12により倍力されたブレーキ操作力を基礎液圧に変換し、各ホイールシリンダWCfl,WCfr,WCrl,WCrrに供給する。
【0025】
リザーバタンク14は、ブレーキ液を貯蔵してマスタシリンダ13にそのブレーキ液を補給するものである。
【0026】
ブレーキアクチュエータ15は、マスタシリンダ13と各ホイールシリンダWCfl,WCfr,WCrl,WCrrとの間に設けられて、ブレーキペダル11の操作の有無に関係なく自動的に形成した制御液圧をホイールシリンダWCfl,WCfr,WCrl,WCrrに付与し、対応する車輪Wfl,Wfr,Wrl,Wrrに摩擦制動力を発生させ得る装置である。
【0027】
図1を参照してブレーキアクチュエータ15の構成を詳述する。ブレーキアクチュエータ15は、独立して作動する液圧回路である複数の系統から構成されている。具体的には、ブレーキアクチュエータ15は、X配管である第1系統15aと第2系統15bを有している。第1系統15aは、マスタシリンダ13の第1液圧室13aと左後輪Wrl,右前輪WfrのホイールシリンダWCrl,WCfrとをそれぞれ連通して、左後輪Wrl,右前輪Wfrの制動力制御に係わる系統である。第2系統15bは、マスタシリンダ13の第2液圧室13bと左前輪Wfl,右後輪WrrのホイールシリンダWCfl,WCrrとをそれぞれ連通して、左前輪Wfl,右後輪Wrrの制動力制御に係わる系統である。
【0028】
第1系統15aは、差圧制御弁21、左後輪液圧制御部22、右前輪液圧制御部23、および第1減圧部24を含んで構成されている。
【0029】
差圧制御弁21は、マスタシリンダ13と、左後輪液圧制御部22の上流部および右前輪液圧制御部23の上流部との間に介装されている常開リニア電磁弁(常開リニアソレノイド弁)である。この差圧制御弁21は、ブレーキECU16により連通状態(非差圧状態)と差圧状態を切り替え制御されるものである。差圧制御弁21は非通電して通常連通状態とされているが、通電して差圧状態(閉じる側)にすることによりホイールシリンダWCrl,WCfr側の液圧をマスタシリンダ13側の液圧よりも所定の制御差圧分高い圧力に保持することができる。この制御差圧はブレーキECU16により制御電流に応じて調圧されるようになっている。これにより、ポンプ24aによる加圧を前提に制御差圧に相当する制御液圧が形成されるようになっている。
【0030】
左後輪液圧制御部22は、ホイールシリンダWCrlに供給する液圧を制御可能なものであり、2ポート2位置切換型の常開電磁開閉弁である増圧弁22aと2ポート2位置切換型の常閉電磁開閉弁である減圧弁22bとから構成されている。増圧弁22aは、差圧制御弁21とホイールシリンダWCrlとの間に介装されており、ブレーキECU16の指令にしたがって差圧制御弁21とホイールシリンダWCrlとを連通または遮断できるようになっている。減圧弁22bは、ホイールシリンダWCrlと調圧リザーバ24cとの間に介装されており、ブレーキECU16の指令にしたがってホイールシリンダWCrlと調圧リザーバ24cとを連通または遮断できるようになっている。これにより、ホイールシリンダWCrl内の液圧が増圧・保持・減圧され得るようになっている。
【0031】
右前輪液圧制御部23は、ホイールシリンダWCfrに供給する液圧を制御可能なものであり、左後輪液圧制御部22と同様に増圧弁23aと減圧弁23bとから構成されている。増圧弁23aおよび減圧弁23bがブレーキECU16の指令により制御されて、ホイールシリンダWCfr内の液圧が増圧・保持・減圧され得るようになっている。
【0032】
第1減圧部24は、ポンプ24a、ポンプ用モータ24b、調圧リザーバ24cを含んで構成されている。ポンプ24aは、調圧リザーバ24c内のブレーキ液を汲み上げて、そのブレーキ液を差圧制御弁21と増圧弁22a,23aとの間に供給するようになっている。このポンプ24aは、ブレーキECU16の指令にしたがって駆動するポンプ用モータ24bによって駆動されるようになっている。ポンプ用モータ24bは、後述するように電源(バッテリBAT)からの電力供給を受けて駆動される電気モータである。
【0033】
調圧リザーバ24cは、ホイールシリンダWCrl、WCfrから減圧弁22b、23bを介して抜いたブレーキ液を一旦溜めておく装置である。また、調圧リザーバ24cは、マスタシリンダ13と連通しており、調圧リザーバ24c内のブレーキ液が所定量以下である場合には、マスタシリンダ13からブレーキ液が供給される一方で、所定量より多い場合には、マスタシリンダ13からのブレーキ液の供給が停止されるようになっている。
【0034】
これにより、差圧制御弁21によって差圧状態が形成されるとともにポンプ24aが駆動されている場合(例えば、横滑り防止制御、トラクションコントロールなどの場合)、マスタシリンダ13から供給されているブレーキ液を調圧リザーバ24c経由で増圧弁22a,23aの上流に供給することができるようになっている。
【0035】
第2系統15bは、差圧制御弁31、左前輪液圧制御部32、右後輪液圧制御部33、および第2減圧部34を含んで構成されている。
【0036】
差圧制御弁31は、マスタシリンダ13と、左前輪液圧制御部32の上流部および右後輪液圧制御部33の上流部との間に介装されている常開リニア電磁弁である。この差圧制御弁31は、差圧制御弁21と同様に、ブレーキECU16によりホイールシリンダWCfl,WCrr側の液圧をマスタシリンダ13側の液圧に対してよりも所定の制御差圧分高い圧力に保持できるようになっている。
【0037】
左前輪液圧制御部32および右後輪液圧制御部33は、ホイールシリンダWCfl,WCrrに供給する液圧をそれぞれ制御可能なものであり、左後輪液圧制御部22と同様に、それぞれ増圧弁32aと減圧弁32b、増圧弁33aと減圧弁33bから構成されている。増圧弁32aと減圧弁32b、増圧弁33aと減圧弁33bがブレーキECU16の指令によりそれぞれ制御されて、ホイールシリンダWCfl内およびホイールシリンダWCrr内の液圧がそれぞれ増圧・保持・減圧され得るようになっている。
【0038】
第2減圧部34は、第1減圧部24と同様に、ポンプ34a、ポンプ用モータ24b(第1減圧部24と共用)、調圧リザーバ34cを含んで構成されている。ポンプ34aは、調圧リザーバ24cと同様な調圧リザーバ34c内のブレーキ液を汲み上げて、そのブレーキ液を差圧制御弁31と増圧弁32a,33aとの間に供給するようになっている。このポンプ34aは、ブレーキECU16の指令にしたがって駆動するポンプ用モータ24bによって駆動されるようになっている。
【0039】
このように構成されたブレーキアクチュエータ15は、通常ブレーキの際には全ての電磁弁が非励磁状態にされて、ブレーキペダル11の操作力に応じたブレーキ液圧、すなわち基礎液圧をホイールシリンダWC**にそれぞれ供給できるようになっている。なお、**は、各輪に対応する添え字であって、fl,fr,rl,rrのいずれかであり、左前、右前、左後、右後を示している。以下の説明及び図面において同じである。
【0040】
また、ポンプ用モータ24bすなわちポンプ24a,34aを駆動するとともに差圧制御弁21,31を励磁すると、マスタシリンダ13からの基礎液圧に制御液圧を加えたブレーキ液圧をホイールシリンダWC**にそれぞれ供給できるようになっている。
【0041】
さらに、ブレーキアクチュエータ15は、増圧弁22a,23a,32a,33a、および減圧弁22b,23b,32b,33bを制御することでホイールシリンダWC**の液圧を個別に調整できるようになっている。これにより、ブレーキECU16からの指示により、例えば、周知のアンチスキッド制御、前後制動力配分制御、ESC(Electronic Stability Control)である横滑り防止制御(具体的には、アンダステア抑制制御、オーバステア抑制制御)、トラクションコントロール、車間距離制御等を達成できるようになっている。
【0042】
また、液圧ブレーキ装置は、車輪速度センサSfl,Sfr,Srl,Srrを備えている。車輪速度センサSfl,Sfr,Srl,Srrは、各車輪Wfl,Wfr,Wrl,Wrrの付近にそれぞれ設けられており、各車輪Wfl,Wfr,Wrl,Wrrの回転に応じた周波数のパルス信号をブレーキECU16に出力している。
【0043】
なお、液圧ブレーキ装置は、ブレーキペダル11が踏まれるとオンされ、踏み込みが解除されるとオフされるストップスイッチ17を備えている。このストップスイッチ17のオン・オフ信号はブレーキECU16に入力されるようになっている。
【0044】
ブレーキECU16は、車両に搭載されるブラシ付きの電気モータ50に適用され、ブラシ66の摩耗量が所定の限界量に達したことを判定する電気モータ用のブラシ摩耗判定装置である。
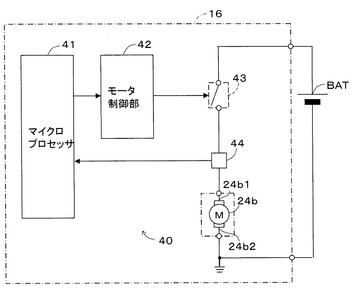
ブレーキECU16は、電源であるバッテリBATからの電力供給を受けて電気モータであるポンプ用モータ24bの駆動を制御する駆動制御回路40を備えている。駆動制御回路40は、図2に示すように、マイクロプロセッサ41、モータ制御部42、スイッチ43および電流検出センサ44を備えている。
直流電源であるバッテリBATの正極(例えば+12V)とポンプ用モータ24bの一方の端子24b1(ハイサイド側の電源接続端子)とが接続されるとともに、バッテリBATの負極とポンプ用モータ24bの他方の端子24b2(ローサイド側の電源接続端子)とが接続されている。
【0045】
モータ制御部42は、マイクロプロセッサ41からの制御指令信号(駆動要求)を入力しその制御指令信号に応じて制御対象のポンプ用モータ24bに供給する駆動電流(駆動電圧)をオン・オフ制御(デューティ制御)するものである。詳しくは、モータ制御部42は、マイクロプロセッサ41からの駆動要求に応じたオン・オフ信号(所定のデューティ比のPWM信号でもよい。)をスイッチ43に送信してポンプ用モータ24bの通電・非通電を制御する。
【0046】
スイッチ43は、ポンプ用モータ24bを回転・停止させるものである。スイッチ43は、直流電源であるバッテリBAT(例えば+12V)とポンプ用モータ24bの一方の端子24b1(ハイサイド側の電源接続端子)との間に直列に接続されてポンプ用モータ24bへの給電・停止を切り替える。スイッチ43は、例えばMOSFET(MOS型電界効果トランジスタ)からなるスイッチング素子で構成されている。
【0047】
電流検出センサ44は、ポンプ用モータ24bに流れている電流を検出するものであり、ポンプ用モータ24bのハイサイド側の電源接続端子24b1とスイッチ43との間に設けられている。電流検出センサ44は、シャント抵抗を備えその抵抗間の電圧(電圧降下)を測定することにより電流を測定する構成となっており、測定結果をマイクロプロセッサ41に出力する。なお、電流検出センサ44は、ホール素子を備え電流を測定するものでもよい。
【0048】
次に図3を参照してポンプ用モータ24bについて説明する。図3は、ポンプ用モータ24bの構成を示す断面図である。ポンプ用モータ24b(50)は、有底円筒形状のモータハウジング51内にアーマチュア52を回動自在に配置した構成となっている。モータハウジング51の内周面には、周方向に1対2個の永久磁石(界磁磁極)53が固定されている。永久磁石53は2対4個で構成するようにしてもよい。
【0049】
アーマチュア52は、回転軸54に固定されたアーマチュアコア52aと、アーマチュアコア52aに巻装されたアーマチュアコイル(電機子巻線)52bとから構成されている。回転軸54の図中右端部は、モータハウジング51に取り付けられた軸受55によって回動自在に支持されており、アーマチュア52はモータハウジング51内に回動自在に内装される。アーマチュアコア52aは、金属板を複数枚積層して構成されており、回転軸54に固定されている。アーマチュアコア52aの外周には、軸方向に沿って複数のティース52d(図4参照)が凸設されるとともに、互いに隣り合うティース52d間に複数のスロット52cが凹設されている。スロット52c間には巻線56が重巻にて巻装される。この巻線56によって、アーマチュアコア52aの外周にアーマチュアコイル52bが形成される。
【0050】
アーマチュアコア52aの一端側(左端側)には、コンミテータ61が隣接して配置されている。コンミテータ61は、回転軸54に外嵌固定されている。コンミテータ61の外周面には、導電材にて形成されたコンミテータ片(整流子片)61aが複数枚(アーマチュアコイル52bと同数)取り付けられている。コンミテータ片61aは軸方向に長い板状の金属片からなり、互いに絶縁された状態で周方向に沿って並列状に固定されている。各コンミテータ片61aのアーマチュアコア52a側の端部には、ライザ63が形成されている。ライザ63には、アーマチュアコイル52bの巻き始め端部と巻き終り端部となる巻線56が巻回され、フュージングにより固定されている。これにより、コンミテータ片61aとこれに対応するアーマチュアコイル52bとが電気的に接続される。
【0051】
モータハウジング51の開口端には、モータカバー64がその開口端を閉塞するように取り付けられている。モータカバー64内には、回転軸54の中央部を回転自在に支持する軸受68が固定されている。モータカバー64の図中右内側には、周方向6箇所に3対のブラシホルダ65が対向配置されており、ポンプ用モータ24bは6並列回路6ブラシ構成となっている。ブラシホルダ65には、それぞれブラシ66(66a〜66f)が進退自在に内装されている。各ブラシ66は、第1ブラシ66aと第3ブラシ66cと第5ブラシ66eがそれぞれ正極であり、第2ブラシ66bと第4ブラシ66dと第6ブラシ66fがそれぞれ負極である。
【0052】
各ブラシ66の突出先端部(内径側先端部)はコンミテータ61に摺接しており、各ブラシ66はスプリング67によってコンミテータ61に押接されている。各ブラシ66にはピグテール(図示省略)を介してバッテリBAT(図5,6参照)と電気的に接続されている。コンミテータ61には、ピグテールおよび各ブラシ66を介してバッテリBATから電力が供給される。
【0053】
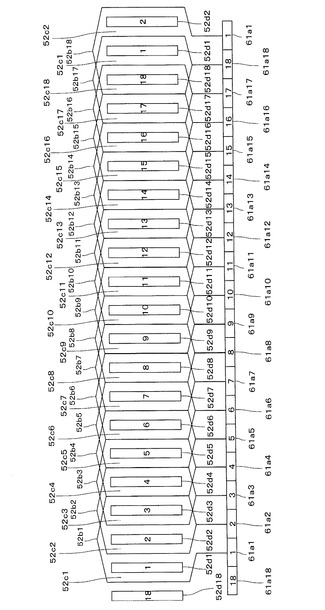
このような電気モータ50では、アーマチュアコイル52bは次のようにして巻装される。図4は、アーマチュア52におけるアーマチュアコイル52bの巻線展開図である。電気モータ50では、アーマチュアコイル52bは重ね巻方式にて巻装され、スロット52c間に3スロット跨ぎにて順次巻装されている。そこで、例えば、巻線56を第1コンミテータ片61a1から巻き始める場合を考えると、まず、第1コンミテータ片61a1のライザ63に巻線56の一端を懸け回し、第1コンミテータ片61a1と巻線56を電気的に接続する。第1コンミテータ片61a1に接続された巻線56は、第18,第1ティース52d18,52d1の間の第1スロット52c1と第3,第4ティース52d3,52d4の間の第4スロット52c4との間に、複数ターン(例えば25ターン)巻回される。第1,第4スロット52c1,52c4間に巻装された巻線56は、その後、第2コンミテータ片61a2に接続され、第1コイル52b1(巻き始めの1コイル)が形成される。
【0054】
電気モータ50においては、第1コイル52b1と同時にその180°反対側の位置に第10コイル52b10(巻き始めの1コイル)を形成する。すなわち、第1コイル52b1の巻装工程と並行する形で、巻線56を第10コンミテータ片61a10から巻き出し、第9,第10ティース52d9,52d10の間の第10スロット52c10と、第12,第13ティース52d12,52d13の間の第13スロット52c13との間に第1コイル52b1と同様に複数ターン(例えば25回)巻回する。そして、第10,第13スロット52c10,52c13間に巻装された巻線56を第11コンミテータ片61a11に接続し、第1コイル52b1と対向した位置に1巻目の第10コイル52b10を形成する。
【0055】
第1,第10コイル52b1,52b10を形成した後、回転軸54を20°回転させ、第1,第10コイル52b1,52b10に続いて2巻目の第2,第11コイル52b2,52b11を形成する。さらに、第2,第11コイル52b2,52b11を形成した後、回転軸を20°回転させ、第2,第11コイル52b2,52b11に続いて3巻目の第3,第12コイル52b3,52b12を形成する。これを繰り返して、第1から第18までのコイル52b1〜52b18を形成する。
【0056】
次に、電気モータ50内の電気回路について図5を参照して説明する。図5は、第1〜第6ブラシ66a〜66fが、第1,4,7,10,13,16コンミテータ片61a1,61a4,61a7,61a10,61a13,61a16にそれぞれ接している場合の一例を示している。バッテリBATの正極は第1、第3および第5ブラシ66a,66c,66eに接続されている。バッテリBATの負極は第2、第4および第6ブラシ66b,66d,66fに接続されている。第1〜第6ブラシ66a〜66fは、コンミテータ片の外周に沿って60度の間隔をおいてかつ正極と負極とが交互に配設されている。
【0057】
第1〜第6ブラシ66a〜66fの磨耗量が所定の限界量に達する前の状態である場合(全ブラシが通電可能である場合)において、バッテリBATの正極と負極との間には、図6(a)にも示すように、以下の6つの直列回路が並列に形成されている。図6(a)、(b)においては、コンミテータ片61aおよびブラシ66を省略している。
【0058】
第1の直列回路は、第1ブラシ66a、第1コンミテータ片61a1、第1〜第3コイル52b1〜52b3、第4コンミテータ片61a4、および第2ブラシ66bをこの順番で直列に接続したものである。第2の直列回路は、第1ブラシ66a、第1コンミテータ片61a1、第18〜第16コイル52b18〜52b16、第16コンミテータ片61a16、および第6ブラシ66fをこの順番で直列に接続したものである。
【0059】
第3の直列回路は、第3ブラシ66c、第7コンミテータ片61a7、第6〜第4コイル52b6〜52b4、第4コンミテータ片61a4、および第2ブラシ66bをこの順番で直列に接続したものである。第4の直列回路は、第3ブラシ66c、第7コンミテータ片61a7、第7〜第9コイル52b7〜52b9、第10コンミテータ片61a10、および第4ブラシ66dをこの順番で直列に接続したものである。
【0060】
第5の直列回路は、第5ブラシ66e、第13コンミテータ片61a13、第12〜第10コイル52b12〜52b10、第10コンミテータ片61a10、および第4ブラシ66dをこの順番で直列に接続したものである。第6の直列回路は、第5ブラシ66e、第13コンミテータ片61a13、第13〜第15コイル52b13〜52b15、第16コンミテータ片61a16、および第6ブラシ66fをこの順番で直列に接続したものである。
【0061】
前述した電気回路の合成抵抗値の導出について説明する。合成抵抗値をRaとする。各コイル52bのインピーダンスをZとすると、第1〜第6直列回路において3つのコイル52bが直列に接続されているので、第1〜第6直列回路の各抵抗値は3Zである。そして、第1〜第6直列回路が並列に接続されているということは、抵抗値3Zの抵抗が6つ並列に接続されているということである。よって、合成抵抗値Raは下記の数1で表される。なお、インピーダンスは、抵抗や自己誘導などの交流に対する全抵抗を示している。
【0062】
【数1】

【0063】
上記数1を解くと、合成抵抗値Raは1/2Zとなる。
さらに、第1〜第6ブラシ66a〜66fのうち第3および第5ブラシ66c,66eの磨耗量が所定の限界量に達した状態である場合(第3および第5ブラシ66c,66eのみが通電不能である場合)において、バッテリBATの正極と負極との間には、図6(b)にも示すように、以下の4つの直列回路が並列に形成されている。
【0064】
第1の直列回路は、第1ブラシ66a、第1コンミテータ片61a1、第1〜第3コイル52b1〜52b3、第4コンミテータ片61a4、および第2ブラシ66bをこの順番で直列に接続したものである。第2の直列回路は、第1ブラシ66a、第1コンミテータ片61a1、第18〜第16コイル52b18〜52b16、第16コンミテータ片61a16、および第6ブラシ66fをこの順番で直列に接続したものである。
【0065】
第3の直列回路は、第1ブラシ66a、第1コンミテータ片61a1、第1〜第9コイル52b1〜52b9、第10コンミテータ片61a10、および第4ブラシ66bをこの順番で直列に接続したものである。第4の直列回路は、第1ブラシ66a、第1コンミテータ片61a1、第18〜第10コイル52b18〜52b10、第10コンミテータ片61a10、および第4ブラシ66bをこの順番で直列に接続したものである。
【0066】
前述した電気回路の合成抵抗値の導出について説明する。合成抵抗値をRbとする。各コイル52bのインピーダンスをZとすると、第1、第2直列回路において3つのコイル52bが直列に接続されているので、第1、第2直列回路の各抵抗値は3Zである。第3、第4直列回路において9つのコイル52bが直列に接続されているので、第3、第4直列回路の各抵抗値は9Zである。そして、第1〜第4直列回路が並列に接続されているということは、抵抗値3Zの2つの抵抗および抵抗値9Zの2つの抵抗が並列に接続されているということである。よって、合成抵抗値Rbは下記の数2で表される。
【0067】
【数2】
【0068】
上記数2を解くと、合成抵抗値Rbは9/8Zとなる。
以上のことから、明らかなように、通電可能なブラシ66の数が減少すると、減少する前と比較して、電気モータ50を始動させた瞬間において、モータ内部抵抗が大きくなることがわかる。すなわち、通電可能なブラシ66の数が減少すると、減少する前と比較して、始動電流が小さくなることがわかる。
【0069】
このことは、図7に示すように、通電可能なブラシの数が減少すると、始動電流値が小さくなることが実験で証明されている。その実験は、6個のブラシ66を有する電気モータ50を使用して行った。6個のブラシ66が全て通電可能な状態、6個のうち1個(例えば第3ブラシ)が通電不能でありすなわち5個のブラシ66が通電可能である状態、および6個のうち2個(例えば第3、第5ブラシ)が通電不能でありすなわち4個のブラシ66が通電可能である状態について、始動電流を測定した。
【0070】
上述したように、電気モータ50を始動させた瞬間には、自己誘導によりインピーダンスが大きくなっているが、電気モータ始動後の所定の低負荷および定回転状態においては、コイル52bのインピーダンスは自己誘導分小さくなる。図8は、電気モータ50に通電した際における電気モータ50に流れている電流(モータ電流)を測定した結果を示している。全ブラシ66(6個)が通電可能である状態の電気モータ50のモータ電流(実線で示す)は、時刻t1に電気モータ50への通電を開始した場合、電気モータ50を始動させた瞬間に電気モータ50には始動電流Ia1が流れる。その後、コイル52bのインピーダンスは自己誘導分小さくなることにより急速にモータ電流は減少し、時刻t1から所定時間経過後である時刻t2には所定の低負荷および定回転状態による定常電流Ibが電気モータ50に流れる。その後、負荷等を変化させないので、定常電流Ibは一定に保たれる。
【0071】
なお、図8においては、破線で示すモータ電流は、全ブラシ66のうち4つが通電可能である状態の電気モータ50のモータ電流を示している。このとき、始動電流はIa2であり、全ブラシ66が通電可能である状態の始動電流Ia1より小さい値である。
【0072】
また、図8に示すように、定常電流Ibは、ブラシ66の数にかかわらず、ほとんど同じであって差がない。これは、以下の理由による。電気モータ50を始動させた瞬間には、自己誘導によりインピーダンスが大きくなっているが、電気モータ始動後の所定の低負荷および定回転状態においては、コイル52bのインピーダンスは自己誘導分小さくなる。よって、コイル52bのインピーダンスは巻線56自身の抵抗値で決定されるとともにその抵抗値は比較的小さい。よって、ブラシ66の故障した数(通電可能なブラシ66の数)によって合成抵抗値にほとんど差はないため、定常電流Ibもほとんど差が生じない。
【0073】
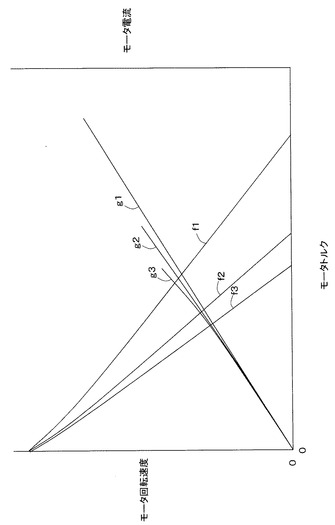
すなわち、図9に示すように、モータトルクが小さく、モータ回転速度が定回転速度(定回転状態)であるとき、全ブラシ66(6個)が通電可能である状態である電気モータ50のモータ電流とモータトルクとの関係を示すg1、全ブラシ66のうち5個が通電可能である状態である電気モータ50のモータ電流とモータトルクとの関係を示すg2、および全ブラシ66のうち4個が通電可能である状態である電気モータ50のモータ電流とモータトルクとの関係を示すg3を、実験で得ることができる。
【0074】
このように関係g1〜g3から、所定の低負荷および定回転状態においては、通電可能なブラシ66の数にかかわらず、定常電流Ibはほとんど同じであることがわかる。
【0075】
なお、負荷(モータトルク)が大きくなると、通電可能なブラシ66の数が少なくなるにしたがって定常電流Ibは大きくなる。
【0076】
また、図9に示すように、モータトルクとモータ回転速度との相関関係は、全ブラシ66(6個)が通電可能である状態のときはf1で示すように最も大きく、通電可能なブラシ66の数が減少するにしたがって小さくなっている。f2は、全ブラシ66(6個)のうち5個のブラシ66が通電可能である状態を示し、f3は、全ブラシ66(6個)のうち4個のブラシ66が通電可能である状態を示している。このように、ブラシ66の数が減少することでモータトルクは減少するが、電気モータ50は回転可能である。
【0077】
上述したことから明らかなように、電気モータ50の通電可能なブラシ66の数が摩耗などによって減少すると、電気モータ50の通電可能なブラシ66の数が減少する前と比較して、電気モータ50を始動させた瞬間に流れている電流である始動電流Iaが低下する。また、電気モータ始動後の所定の低負荷および定回転状態で当該電気モータ50に流れている電流である定常電流Ibは、低負荷であるため、電気モータ50の通電可能なブラシ66が減少しても、電気モータ50の通電可能なブラシ66の数が減少する前と比較してもほとんど差がない。
【0078】
よって、定常電流Ibは始動電流Iaと同様の温度依存性を有するため、環境温度による変動があっても、定常電流Ibと始動電流Iaとは同様に変動するため環境温度による変動をキャンセルできる。よって、始動電流Iaから定常電流Ibを差し引いた値に基づくブラシ摩耗判定手段による判定により、ブラシ摩耗量の限界を精度よく行うことができる。
【0079】
また、始動電流Iaと定常電流Ibとが共通の電流検出センサ44の検出値に基づいて検出されるため、電流検出センサ44の検出ばらつきや電源電圧(バッテリBAT)の変動があっても、検出される定常電流Ibと始動電流Iaとは同様に変動するため電流検出センサ44の検出ばらつきや電源電圧の変動をキャンセルできる。よって、始動電流Iaから定常電流Ibを差し引いた値に基づくブラシ摩耗判定手段による判定により、ブラシ摩耗量の限界を精度よく行うことができる。
【0080】
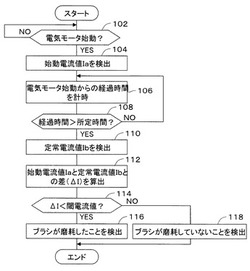
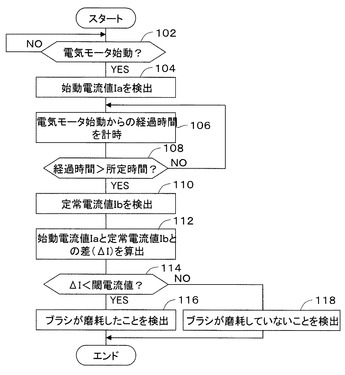
次に、上記のように構成したブレーキECU16の作動について図10に示すフローチャートを参照して説明する。ブレーキECU16は、図示しないイグニッションスイッチがオンされると、液圧ブレーキ装置の制御プログラムの実行を開始する。ブレーキECU16は、ステップ102において、電気モータ50が始動されるか否かを判定し、始動されないと判定した場合は、ステップ102の処理を繰り返し実行する。始動されると判定した場合は、ブレーキECU16は、ステップ104にて、電流検出センサ44によって、電気モータ50を始動させた瞬間に当該電気モータ50に流れている電流である始動電流Iaを検出する(始動電流検出手段)。
【0081】
次に、ブレーキECU16は、電気モータ50の始動時点(図8の時刻t1)から所定時間(図8のΔT(例えば0.05秒))経過した時点(図8の時刻t2)の定常電流Ibを検出する。具体的には、ブレーキECU16は、ステップ106において、電気モータ50の始動時点(図8の時刻t1)からの経過時間を計時する。ブレーキECU16は、ステップ108において、計時した経過時間が所定時間ΔTより大きいか否かを判定する。なお、所定時間ΔTは、始動電流が流れなくなるのにかかる時間に設定されている。
【0082】
ブレーキECU16は、所定時間ΔT未満であると判定した場合には、ステップ108にて「NO」と判定し、所定時間ΔTより大きいと判定するまで、ステップ106,108の処理を繰り返し実行する。ブレーキECU16は、所定時間ΔTより大きいと判定した場合には、ステップ110にて、電流検出センサ44によって、電気モータ始動後の所定の低負荷及び定回転状態において当該電気モータ50に流れている電流である定常電流Ibを検出する(定常電流検出手段)。
【0083】
ブレーキECU16は、ステップ104(始動電流検出手段)により検出された始動電流Iaからステップ110(定常電流検出手段)により検出された定常電流Ibを差し引いた値(ΔI)が所定の閾電流値より小さい場合に、ブラシ66の摩耗量が限界量に達したことを判定する(ブラシ摩耗判定手段)。
【0084】
なお、「ブラシ66の摩耗量が限界量に達した」とは、電気モータ50が有するブラシ66が全て通電可能な状態ではなくなり、1以上のブラシ66が通電不能な状態となっている状態のことを示している。また、上述したように通電不能となったブラシ66が発生したとき通電可能な状態で残っているブラシ66の数に応じて始動電流Iaが変化するので、閾電流値は、通電可能なブラシ66の残存数に応じた値に設定されている。
【0085】
具体的には、ブレーキECU16は、ステップ112において、始動電流Iaから定常電流Ibとの差であるΔIを算出する。ブレーキECU16は、ステップ114において、算出した差ΔIが閾電流値より小さいか否かを判定する。ブレーキECU16は、差ΔIが閾電流値より小さいと判定した場合には、ステップ114にて「YES」と判定し、ブラシ66の摩耗量が限界量に達したことを判定する(ステップ116)。例えば、図8の破線で示すように、時刻t1での始動電流IaがIa2である場合には、差ΔI2は、始動電流Ia2と定常電流Ibとの差となる。差ΔI2は閾電流値より小さいため、ブラシ66の摩耗量が限界量に達したと判定される。
【0086】
一方、ブレーキECU16は、差ΔIが閾電流値以上であると判定した場合には、ステップ114にて「NO」と判定し、ブラシ66の摩耗量が限界量に達していないことを判定する(ステップ118)。例えば、図8の実線で示すように、時刻t1での始動電流IaがIa1である場合には、差ΔI1は、始動電流Ia1と定常電流Ibとの差となる。差ΔI1は閾電流値より大きいため、ブラシ66の摩耗量が限界量に達していないと判定される。
【0087】
このように、上述したように通電不能となったブラシ66が発生したとき通電可能な状態で残っているブラシ66の数が減少するにしたがって始動電流Iaも減少するので、差ΔIと通電可能なブラシ66の残存数に応じた値に設定されている閾電流値とを比較することで、残存する通電可能なブラシ66がブラシ摩耗量の限界に達しているか否かを精度よく判定することができる。
【0088】
上述した説明から明らかなように、本実施形態によれば、始動電流検出手段(ステップ104)が、電気モータ50を始動させた瞬間に当該電気モータ50に流れている電流である始動電流Iaを検出する。定常電流検出手段(ステップ110)が、電気モータ始動後の所定の低負荷及び定回転状態において当該電気モータ50に流れている電流である定常電流Ibを検出する。そして、ブラシ摩耗判定手段(ステップ112〜116)が、始動電流検出手段により検出された始動電流Iaから定常電流検出手段により検出された定常電流Ibを差し引いた値ΔIが所定の閾電流値より小さい場合に、ブラシの摩耗量が限界量に達したことを判定する。
【0089】
詳しくは、電気モータ50の通電可能なブラシ66の数が摩耗などによって減少すると、電気モータ50の通電可能なブラシ66の数が減少する前と比較して、電気モータ50を始動させた瞬間に流れている電流である始動電流Iaが低下する。また、電気モータ始動後の所定の低負荷および定回転状態で当該電気モータ50に流れている電流である定常電流Ibは、低負荷であるため、電気モータ50の通電可能なブラシ66が減少しても、電気モータ50の通電可能なブラシ66の数が減少する前と比較してもほとんど差がない。
【0090】
ここで、定常電流Ibは始動電流Iaと同様の温度依存性を有する。よって、環境温度による変動があっても、定常電流Ibと始動電流Iaとは同様に変動するため環境温度による変動をキャンセルできる。したがって、始動電流Iaから定常電流Ibを差し引いた値ΔIに基づくブラシ摩耗判定手段による判定により、ブラシ摩耗量の限界を精度よく行うことができる。これにより、電気モータ用のブラシ摩耗判定装置において、環境温度のばらつきによる誤判定を抑制することができる。
【0091】
また、始動電流検出手段および定常電流検出手段は、電気モータ50に流れている電流を検出するための共通の電流検出センサ44を有して構成され、電流検出センサ44の検出値に基づいてそれぞれ始動電流Iaおよび定常電流Ibを検出する。これにより、始動電流Iaと定常電流Ibとが共通の電流検出センサ44の検出値に基づいて検出されるため、電流検出センサ44の検出ばらつきや電源電圧の変動があっても、検出される定常電流Ibと始動電流Iaとは同様に変動するため電流検出センサ44の検出ばらつきや電源電圧(バッテリ)BATの変動をキャンセルできる。よって、始動電流Iaから定常電流Ibを差し引いた値に基づくブラシ摩耗判定手段による判定により、ブラシ摩耗量の限界を精度よく行うことができる。これにより、電気モータ用のブラシ摩耗判定装置において、電流検出センサ44の検出ばらつきや電源電圧(バッテリ)BATの変動による誤判定を抑制することができる。
【0092】
また、電気モータ50は、電気モータ50の始動から所定時間経過後に低負荷および定回転状態となる場合がある。そこで、上記の実施形態においては、電気モータ50の始動(時刻t1)からの経過時間を計時する計時手段(ステップ106)を備え、定常電流検出手段(ステップ110)は、計時手段により計時された計時時間が所定時間となったタイミング(時刻t2)において電気モータ50に流れている電流を定常電流Ibとして検出する。これにより、電気モータ50の低負荷および定回転状態を検出することなく(専用の検出装置を設けることなく)、定常電流Ibを検出することができ、電気モータ用のブラシ摩耗判定装置を簡素に構成することができる。
【0093】
なお、上述した実施形態においては、イニシャルチェックなどの特定のモードでなく、通常に電気モータ50が始動した時点から所定時間経過の時点にて定常電流Ibを検出するように構成しているが、これに代えて、イニシャルチェックなど必ず電気モータ50が始動される特定のモードにて、所定のタイミングから所定時間経過の時点にて定常電流Ibを検出するように構成するようにしてもよい。
【0094】
具体的には、ブレーキECU16は、イグニッションスイッチがオンされると、イニシャルチェックを開始する。イニシャルチェックでは、各弁21,22a,22b,23a,23b,31,32a,32b,33a,33b、ポンプ用モータ24bなどの異常の有無を確認する。このイニシャルチェックの一環においてブラシ摩耗判定を行う。
【0095】
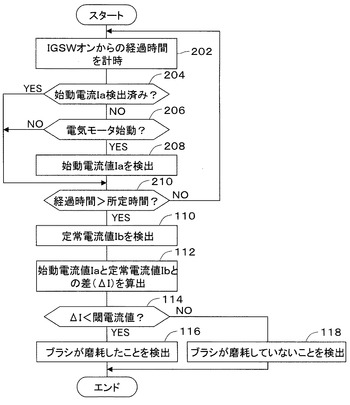
この場合のブレーキECU16の作動について図11に示すフローチャートを参照して説明する。図10のフローチャートと同一の処理には同一の符号を付してその説明を省略する。ブレーキECU16は、図示しないイグニッションスイッチがオンされると、液圧ブレーキ装置の制御プログラムの実行を開始する。ブレーキECU16は、ステップ202において、イグニッションスイッチのオン時点からの経過時間を計時する。
【0096】
電気モータ50のイニシャルチェックは、イグニッションスイッチのオン時点から時間をおかない時点で開始される。よって、ブレーキECU16は、ステップ206において、イニシャルチェックに係る電気モータ50の始動がなされたか否かを判定し、始動がなされないと判定した場合は、プログラムをステップ210に進める。始動がなされたと判定した場合は、ブレーキECU16は、ステップ208にて、電流検出センサ44によって、電気モータ50を始動させた瞬間に当該電気モータ50に流れている電流である始動電流Iaを検出する(始動電流検出手段)。
【0097】
ブレーキECU16は、ステップ204において、始動電流Iaが検出済みであるか否かを判定するので、始動電流Iaが一旦検出されると、ステップ204にて「YES」と判定し、プログラムをステップ210に進める。
【0098】
ブレーキECU16は、イグニッションスイッチのオン時点以降に電気モータ50が始動されその始動電流Iaが検出された後に、イグニッションスイッチのオン時点からの経過時間が所定時間より大きくなった場合には、ステップ210で「YES」と判定し、プログラムをステップ110以降に進める。ブレーキECU16は、ステップ110において、電気モータ始動後の所定の低負荷及び定回転状態において当該電気モータ50に流れている電流である定常電流Ibを検出する(定常電流検出手段)。なお、所定時間は、イグニッションスイッチオンの時点と電気モータ50の始動の時点との関係、始動電流が流れなくなるのにかかる時間などを考慮して設定されている。
【0099】
そして、ブレーキECU16は、上述したステップ112〜118の処理によって、ステップ208(始動電流検出手段)により検出された始動電流Iaからステップ110(定常電流検出手段)により検出された定常電流Ibを差し引いた値(ΔI)が所定の閾電流値より小さい場合に、ブラシ66の摩耗量が限界量に達したことを判定する(ブラシ摩耗判定手段)。
【0100】
これによれば、車両に搭載されている電気モータ50はイニシャルチェックにおいて始動される。また、その電気モータ50にイニシャルチェックが適用される場合には、電気モータ50はイニシャルチェックに係る所定のタイミング(イグニッションスイッチのオン時点)から所定時間経過後に低負荷および定回転状態となる。そこで、車両のイニシャルチェックの開始に係る所定のタイミングからの経過時間を計時する計時手段(ステップ202,210)を備え、定常電流検出手段(ステップ110)は、計時手段により計時された計時時間が所定時間となったタイミングにおいて電気モータ50に流れている電流を定常電流Ibとして検出する。これにより、電気モータ50の低負荷および定回転状態を検出することなく(専用の検出装置を設けることなく)、定常電流Ibを検出することができ、電気モータ用のブラシ摩耗判定装置を簡素に構成することができる。
【0101】
なお、イニシャルチェックに係る所定のタイミングは、イグニッションスイッチのオン時点だけでなく、他にドアを開ける時点などがある。
また、上述した実施形態においては、本発明を液圧ブレーキ装置に設けられた電気モータに適用したが、車両に搭載された電動ブレーキ装置に設けられた電気モータに適用することもできる。なお、電動ブレーキ装置は、液圧ブレーキ装置のホイールシリンダの油圧の代わりに電気モータによる押圧を使用するものである。なお、車両に搭載されたその他の電気モータにも適用することも可能である。
【符号の説明】
【0102】
11…ブレーキペダル、12…真空式制動倍力装置、13…マスタシリンダ、14…リザーバタンク、15…ブレーキアクチュエータ、16…ブレーキECU(始動電流検出手段、定常電流検出手段、ブラシ磨耗判定手段、計時手段)、21,31…差圧制御弁、22…左後輪液圧制御部、23…右前輪液圧制御部、24…第1減圧部、32…左前輪液圧制御部、33…右後輪液圧制御部、34…第2減圧部、40…駆動制御回路、41…マイクロプロセッサ、42…モータ制御部、43…スイッチ、44…電流検出センサ、50…電気モータ、52b…アーマチュアコイル(コイル)、61a…コンミテータ片、66…ブラシ、Wfl,Wfr,Wrl,Wrr…車輪、Sfl,Sfr,Srl,Srr…車輪速度センサ、WCfl,WCfr,WCrl,WCrr…ホイールシリンダ。
【技術分野】
【0001】
本発明は、電気モータ用のブラシ摩耗判定装置に関するものである。
【背景技術】
【0002】
電気モータ用のブラシ摩耗判定装置の一形式として、特許文献1に示されているものが知られている。特許文献1の図1に示されているように、電気モータ用のブラシ摩耗判定装置は、電源10と、ブラシモータ30と、液圧ポンプ50と、アクチュエータ70と、リリーフ弁60と、を備える車載用液圧装置100a(100b)において、前記車載用液圧装置は、前記ブラシモータのモータ電流(ブラシ温度)を検出する電流センサ80a(温度センサ80b)と、前記ブラシモータのブラシの寿命終期を検知するブラシ摩耗検知装置90と、を更に備え、前記ブラシ摩耗検知装置は、前記リリーフ弁による圧力の制限中、前記電流センサ(温度センサ)により検出した電流(温度)と基準電流(基準温度)との比較に基づき、前記ブラシモータのブラシの寿命終期を検知するように構成されている。
【0003】
電気モータ用のブラシ摩耗判定装置においては、特許文献1の図3(a)に示されているように、ブラシモータのブラシが寿命終期を迎える以前では、リリーフ状態におけるモータ電流の値は、ブラシとコミュテータとの接触状態の影響を受けて若干変動はするが、比較的小さい変動幅aの範囲内において概ね一定の値で推移する。
【0004】
一方、特許文献1の図3(b)に示されているように、ブラシモータのブラシが寿命終期を迎えた以後においては、リリーフ状態におけるモータ電流の値は、ブラシとコミュテータとの接触状態の悪化の影響を受けて、変動幅aを大きく超える変動幅bの範囲内で経時的に変動する。このモータ電流の変動幅の増加は、ブラシモータのブラシが寿命終期に近付くと、ブラシの表面が荒れることにより、ブラシとコミュータとの接触状態が悪化して、コミュータとブラシとの間に異常なアークが発生することに起因する。
【0005】
そこで、車載用液圧装置100aの始業前点検時等において、リリーフ状態におけるモータ電流を検出して、その検出したモータ電流の値の変動幅が所定の変動閾値以上となる場合、ブラシモータ30のブラシが寿命終期を迎えたと判定するようになっている。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2008−301567号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
上述した特許文献1に記載の電気モータ用のブラシ摩耗判定装置においては、ブラシが寿命終期を迎えたと判定することはできる。しかし、検出されるモータ電流の値は、モータの抵抗値および配線抵抗で決定され、それらの抵抗値や環境温度(雰囲気温度)のばらつきによって変動するものである。よって、上記抵抗値の変動に起因してブラシの寿命終期を誤検出するおそれがあった。
【0008】
そこで、本発明は、上述した問題を解消するためになされたもので、電気モータ用のブラシ摩耗判定装置において、環境温度による誤判定を抑制することを目的とする。
【課題を解決するための手段】
【0009】
上記の課題を解決するため、請求項1に係る発明の構成上の特徴は、車両に搭載されるブラシ付きの電気モータに適用され、ブラシの摩耗量が所定の限界量に達したことを判定する電気モータ用のブラシ摩耗判定装置において、電気モータを始動させた瞬間に当該電気モータに流れている電流である始動電流を検出する始動電流検出手段と、電気モータ始動後の所定の低負荷及び定回転状態において当該電気モータに流れている電流である定常電流を検出する定常電流検出手段と、始動電流検出手段により検出された始動電流から定常電流検出手段により検出された定常電流を差し引いた値が所定の閾電流値より小さい場合に、ブラシの摩耗量が限界量に達したことを判定するブラシ摩耗判定手段と、を備えていることである。
【0010】
請求項2に係る発明の構成上の特徴は、始動電流検出手段および定常電流検出手段は、電気モータに流れている電流を検出するための共通の電流検出センサを有して構成され、電流検出センサの検出値に基づいてそれぞれ始動電流および定常電流を検出することである。
【0011】
請求項3に係る発明の構成上の特徴は、請求項1または請求項2において、電気モータの始動からの経過時間を計時する計時手段を備え、定常電流検出手段は、計時手段により計時された計時時間が所定時間となったタイミングにおいて電気モータに流れている電流を定常電流として検出することである。
【0012】
請求項4に係る発明の構成上の特徴は、請求項1または請求項2において、車両のイニシャルチェックの開始に係る所定のタイミングからの経過時間を計時する計時手段を備え、定常電流検出手段は、計時手段により計時された計時時間が所定時間となったタイミングにおいて電気モータに流れている電流を定常電流として検出することである。
【発明の効果】
【0013】
上記のように構成した請求項1に係る発明においては、始動電流検出手段が、電気モータを始動させた瞬間に当該電気モータに流れている電流である始動電流を検出する。定常電流検出手段が、電気モータ始動後の所定の低負荷及び定回転状態において当該電気モータに流れている電流である定常電流を検出する。そして、ブラシ摩耗判定手段が、始動電流検出手段により検出された始動電流から定常電流検出手段により検出された定常電流を差し引いた値が所定の閾電流値より小さい場合に、ブラシの摩耗量が限界量に達したことを判定する。
【0014】
詳しくは、電気モータの通電可能なブラシの数が摩耗などによって減少すると、電気モータの通電可能なブラシの数が減少する前と比較して、電気モータを始動させた瞬間に流れている電流である始動電流が低下する。また、電気モータ始動後の所定の低負荷および定回転状態で当該電気モータに流れている電流である定常電流は、低負荷であるため、電気モータの通電可能なブラシが減少しても、電気モータの通電可能なブラシの数が減少する前と比較してもほとんど差がない。
【0015】
ここで、定常電流は始動電流と同様の温度依存性を有する。よって、環境温度による変動があっても、定常電流と始動電流とは同様に変動するため環境温度による変動をキャンセルできる。したがって、始動電流から定常電流を差し引いた値に基づくブラシ摩耗判定手段による判定により、ブラシ摩耗量の限界を精度よく行うことができる。これにより、電気モータ用のブラシ摩耗判定装置において、環境温度のばらつきによる誤判定を抑制することができる。
【0016】
また、上記のように構成した請求項2に係る発明においては、始動電流と定常電流とが共通の電流検出センサの検出値に基づいて検出されるため、電流検出センサの検出ばらつきや電源電圧の変動があっても、検出される定常電流と始動電流とは同様に変動するため電流検出センサの検出ばらつきや電源電圧の変動をキャンセルできる。よって、上記始動電流から定常電流を差し引いた値に基づくブラシ摩耗判定手段による判定により、ブラシ摩耗量の限界を精度よく行うことができる。これにより、電気モータ用のブラシ摩耗判定装置において、電流検出センサの検出ばらつきや電源電圧の変動による誤判定を抑制することができる。
【0017】
電気モータは、電気モータの始動から所定時間経過後に低負荷および定回転状態となる場合がある。そこで、上記のように構成した請求項3に係る発明においては、電気モータの始動からの経過時間を計時する計時手段を備え、定常電流検出手段は、計時手段により計時された計時時間が所定時間となったタイミングにおいて電気モータに流れている電流を定常電流として検出する。これにより、電気モータの低負荷および定回転状態を検出することなく(専用の検出装置を設けることなく)、定常電流を検出することができ、電気モータ用のブラシ摩耗判定装置を簡素に構成することができる。
【0018】
車両に搭載されている電気モータはイニシャルチェックにおいて始動される。また、その電気モータにイニシャルチェックが適用される場合には、電気モータはイニシャルチェックに係る所定のタイミングから所定時間経過後に低負荷および定回転状態となる。そこで、上記のように構成した請求項4に係る発明においては、車両のイニシャルチェックの開始に係る所定のタイミングからの経過時間を計時する計時手段を備え、定常電流検出手段は、計時手段により計時された計時時間が所定時間となったタイミングにおいて電気モータに流れている電流を定常電流として検出する。これにより、電気モータの低負荷および定回転状態を検出することなく(専用の検出装置を設けることなく)、定常電流を検出することができ、電気モータ用のブラシ摩耗判定装置を簡素に構成することができる。
【図面の簡単な説明】
【0019】
【図1】本発明による電気モータ用のブラシ磨耗判定装置を適用した液圧ブレーキ装置の一実施形態を示す概要図である。
【図2】本発明による電気モータ用のブラシ磨耗判定装置を示す概要図である。
【図3】図1に示すポンプ用モータ(電気モータ)を示す断面図である。
【図4】図3に示すアーマチュアにおけるアーマチュアコイル(コイル)の巻線展開図である。
【図5】電気モータにおいて、第1〜第6ブラシが、第1,4,7,10,13,16コンミテータ片にそれぞれ接している場合の一例を示す図である。
【図6】(a)は、第1〜第6ブラシの全てのブラシが通電可能な状態である場合の電気モータ内の回路図であり、(b)は、第1〜第6ブラシのうち第3、第5ブラシが通電不能な状態である場合の電気モータ内の回路図である。
【図7】通電可能なブラシの数と始動電流値との関係を示す図である。
【図8】本発明による電気モータ用のブラシ磨耗判定装置の作用効果を説明するためのタイムチャートである。
【図9】通電可能なブラシの数を変化させたときの、モータトルクとモータ回転速度との関係、およびモータトルクとモータ電流との関係を示す図である。
【図10】図1に示すブレーキECUにて実行される制御プログラムのフローチャートの一例である。
【図11】図1に示すブレーキECUにて実行される制御プログラムのフローチャートの一例である。
【発明を実施するための形態】
【0020】
以下、本発明に係る電気モータ用のブラシ磨耗判定装置を液圧ブレーキ装置に適用した一実施形態を図面を参照して説明する。図1は液圧ブレーキ装置の構成を示す概要図であり、図2はポンプ用モータ24bの駆動を制御する駆動制御回路40を示す図である。
【0021】
液圧ブレーキ装置は、車両を制動させるためのものであり、図1に示すように、各ホイールシリンダWCfl,WCfr,WCrl,WCrr、ブレーキ操作部材であるブレーキペダル11、真空式制動倍力装置12、マスタシリンダ13、リザーバタンク14、液圧自動発生装置であるブレーキアクチュエータ15、およびブレーキECU16を備えている。
【0022】
各ホイールシリンダWCfl,WCfr,WCrl,WCrrは、各車輪Wfl,Wfr,Wrl,Wrrの回転をそれぞれ規制するものであり、各キャリパCLfl,CLfr,CLrl,CLrrに設けられている。各ホイールシリンダWCfl,WCfr,WCrl,WCrrに基礎液圧および制御液圧の少なくともいずれかが供給されると、各ホイールシリンダWCfl,WCfr,WCrl,WCrrの各ピストン(図示省略)が摩擦部材である一対のブレーキパッド(図示省略)を押圧して各車輪Wfl,Wfr,Wrl,Wrrと一体回転する回転部材であるディスクロータDRfl,DRfr,DRrl,DRrrを両側から挟んでその回転を規制するようになっている。なお、本実施形態においては、ディスク式ブレーキを採用するようにしたが、ドラム式ブレーキを採用するようにしてもよい。
【0023】
真空式制動倍力装置12は、エンジンの吸気負圧をダイヤフラムに作用させてブレーキペダル11の踏み込み操作により生じるブレーキ操作力を助勢して倍力(増大)する倍力装置である
【0024】
マスタシリンダ13は、ドライバによるブレーキペダル11の操作力を変換して基礎液圧を形成し、その基礎液圧によって車輪Wfl,Wfr,Wrl,Wrrに摩擦制動力を発生させ得る装置である。本実施形態では、マスタシリンダ13は、真空式制動倍力装置12により倍力されたブレーキ操作力を基礎液圧に変換し、各ホイールシリンダWCfl,WCfr,WCrl,WCrrに供給する。
【0025】
リザーバタンク14は、ブレーキ液を貯蔵してマスタシリンダ13にそのブレーキ液を補給するものである。
【0026】
ブレーキアクチュエータ15は、マスタシリンダ13と各ホイールシリンダWCfl,WCfr,WCrl,WCrrとの間に設けられて、ブレーキペダル11の操作の有無に関係なく自動的に形成した制御液圧をホイールシリンダWCfl,WCfr,WCrl,WCrrに付与し、対応する車輪Wfl,Wfr,Wrl,Wrrに摩擦制動力を発生させ得る装置である。
【0027】
図1を参照してブレーキアクチュエータ15の構成を詳述する。ブレーキアクチュエータ15は、独立して作動する液圧回路である複数の系統から構成されている。具体的には、ブレーキアクチュエータ15は、X配管である第1系統15aと第2系統15bを有している。第1系統15aは、マスタシリンダ13の第1液圧室13aと左後輪Wrl,右前輪WfrのホイールシリンダWCrl,WCfrとをそれぞれ連通して、左後輪Wrl,右前輪Wfrの制動力制御に係わる系統である。第2系統15bは、マスタシリンダ13の第2液圧室13bと左前輪Wfl,右後輪WrrのホイールシリンダWCfl,WCrrとをそれぞれ連通して、左前輪Wfl,右後輪Wrrの制動力制御に係わる系統である。
【0028】
第1系統15aは、差圧制御弁21、左後輪液圧制御部22、右前輪液圧制御部23、および第1減圧部24を含んで構成されている。
【0029】
差圧制御弁21は、マスタシリンダ13と、左後輪液圧制御部22の上流部および右前輪液圧制御部23の上流部との間に介装されている常開リニア電磁弁(常開リニアソレノイド弁)である。この差圧制御弁21は、ブレーキECU16により連通状態(非差圧状態)と差圧状態を切り替え制御されるものである。差圧制御弁21は非通電して通常連通状態とされているが、通電して差圧状態(閉じる側)にすることによりホイールシリンダWCrl,WCfr側の液圧をマスタシリンダ13側の液圧よりも所定の制御差圧分高い圧力に保持することができる。この制御差圧はブレーキECU16により制御電流に応じて調圧されるようになっている。これにより、ポンプ24aによる加圧を前提に制御差圧に相当する制御液圧が形成されるようになっている。
【0030】
左後輪液圧制御部22は、ホイールシリンダWCrlに供給する液圧を制御可能なものであり、2ポート2位置切換型の常開電磁開閉弁である増圧弁22aと2ポート2位置切換型の常閉電磁開閉弁である減圧弁22bとから構成されている。増圧弁22aは、差圧制御弁21とホイールシリンダWCrlとの間に介装されており、ブレーキECU16の指令にしたがって差圧制御弁21とホイールシリンダWCrlとを連通または遮断できるようになっている。減圧弁22bは、ホイールシリンダWCrlと調圧リザーバ24cとの間に介装されており、ブレーキECU16の指令にしたがってホイールシリンダWCrlと調圧リザーバ24cとを連通または遮断できるようになっている。これにより、ホイールシリンダWCrl内の液圧が増圧・保持・減圧され得るようになっている。
【0031】
右前輪液圧制御部23は、ホイールシリンダWCfrに供給する液圧を制御可能なものであり、左後輪液圧制御部22と同様に増圧弁23aと減圧弁23bとから構成されている。増圧弁23aおよび減圧弁23bがブレーキECU16の指令により制御されて、ホイールシリンダWCfr内の液圧が増圧・保持・減圧され得るようになっている。
【0032】
第1減圧部24は、ポンプ24a、ポンプ用モータ24b、調圧リザーバ24cを含んで構成されている。ポンプ24aは、調圧リザーバ24c内のブレーキ液を汲み上げて、そのブレーキ液を差圧制御弁21と増圧弁22a,23aとの間に供給するようになっている。このポンプ24aは、ブレーキECU16の指令にしたがって駆動するポンプ用モータ24bによって駆動されるようになっている。ポンプ用モータ24bは、後述するように電源(バッテリBAT)からの電力供給を受けて駆動される電気モータである。
【0033】
調圧リザーバ24cは、ホイールシリンダWCrl、WCfrから減圧弁22b、23bを介して抜いたブレーキ液を一旦溜めておく装置である。また、調圧リザーバ24cは、マスタシリンダ13と連通しており、調圧リザーバ24c内のブレーキ液が所定量以下である場合には、マスタシリンダ13からブレーキ液が供給される一方で、所定量より多い場合には、マスタシリンダ13からのブレーキ液の供給が停止されるようになっている。
【0034】
これにより、差圧制御弁21によって差圧状態が形成されるとともにポンプ24aが駆動されている場合(例えば、横滑り防止制御、トラクションコントロールなどの場合)、マスタシリンダ13から供給されているブレーキ液を調圧リザーバ24c経由で増圧弁22a,23aの上流に供給することができるようになっている。
【0035】
第2系統15bは、差圧制御弁31、左前輪液圧制御部32、右後輪液圧制御部33、および第2減圧部34を含んで構成されている。
【0036】
差圧制御弁31は、マスタシリンダ13と、左前輪液圧制御部32の上流部および右後輪液圧制御部33の上流部との間に介装されている常開リニア電磁弁である。この差圧制御弁31は、差圧制御弁21と同様に、ブレーキECU16によりホイールシリンダWCfl,WCrr側の液圧をマスタシリンダ13側の液圧に対してよりも所定の制御差圧分高い圧力に保持できるようになっている。
【0037】
左前輪液圧制御部32および右後輪液圧制御部33は、ホイールシリンダWCfl,WCrrに供給する液圧をそれぞれ制御可能なものであり、左後輪液圧制御部22と同様に、それぞれ増圧弁32aと減圧弁32b、増圧弁33aと減圧弁33bから構成されている。増圧弁32aと減圧弁32b、増圧弁33aと減圧弁33bがブレーキECU16の指令によりそれぞれ制御されて、ホイールシリンダWCfl内およびホイールシリンダWCrr内の液圧がそれぞれ増圧・保持・減圧され得るようになっている。
【0038】
第2減圧部34は、第1減圧部24と同様に、ポンプ34a、ポンプ用モータ24b(第1減圧部24と共用)、調圧リザーバ34cを含んで構成されている。ポンプ34aは、調圧リザーバ24cと同様な調圧リザーバ34c内のブレーキ液を汲み上げて、そのブレーキ液を差圧制御弁31と増圧弁32a,33aとの間に供給するようになっている。このポンプ34aは、ブレーキECU16の指令にしたがって駆動するポンプ用モータ24bによって駆動されるようになっている。
【0039】
このように構成されたブレーキアクチュエータ15は、通常ブレーキの際には全ての電磁弁が非励磁状態にされて、ブレーキペダル11の操作力に応じたブレーキ液圧、すなわち基礎液圧をホイールシリンダWC**にそれぞれ供給できるようになっている。なお、**は、各輪に対応する添え字であって、fl,fr,rl,rrのいずれかであり、左前、右前、左後、右後を示している。以下の説明及び図面において同じである。
【0040】
また、ポンプ用モータ24bすなわちポンプ24a,34aを駆動するとともに差圧制御弁21,31を励磁すると、マスタシリンダ13からの基礎液圧に制御液圧を加えたブレーキ液圧をホイールシリンダWC**にそれぞれ供給できるようになっている。
【0041】
さらに、ブレーキアクチュエータ15は、増圧弁22a,23a,32a,33a、および減圧弁22b,23b,32b,33bを制御することでホイールシリンダWC**の液圧を個別に調整できるようになっている。これにより、ブレーキECU16からの指示により、例えば、周知のアンチスキッド制御、前後制動力配分制御、ESC(Electronic Stability Control)である横滑り防止制御(具体的には、アンダステア抑制制御、オーバステア抑制制御)、トラクションコントロール、車間距離制御等を達成できるようになっている。
【0042】
また、液圧ブレーキ装置は、車輪速度センサSfl,Sfr,Srl,Srrを備えている。車輪速度センサSfl,Sfr,Srl,Srrは、各車輪Wfl,Wfr,Wrl,Wrrの付近にそれぞれ設けられており、各車輪Wfl,Wfr,Wrl,Wrrの回転に応じた周波数のパルス信号をブレーキECU16に出力している。
【0043】
なお、液圧ブレーキ装置は、ブレーキペダル11が踏まれるとオンされ、踏み込みが解除されるとオフされるストップスイッチ17を備えている。このストップスイッチ17のオン・オフ信号はブレーキECU16に入力されるようになっている。
【0044】
ブレーキECU16は、車両に搭載されるブラシ付きの電気モータ50に適用され、ブラシ66の摩耗量が所定の限界量に達したことを判定する電気モータ用のブラシ摩耗判定装置である。
ブレーキECU16は、電源であるバッテリBATからの電力供給を受けて電気モータであるポンプ用モータ24bの駆動を制御する駆動制御回路40を備えている。駆動制御回路40は、図2に示すように、マイクロプロセッサ41、モータ制御部42、スイッチ43および電流検出センサ44を備えている。
直流電源であるバッテリBATの正極(例えば+12V)とポンプ用モータ24bの一方の端子24b1(ハイサイド側の電源接続端子)とが接続されるとともに、バッテリBATの負極とポンプ用モータ24bの他方の端子24b2(ローサイド側の電源接続端子)とが接続されている。
【0045】
モータ制御部42は、マイクロプロセッサ41からの制御指令信号(駆動要求)を入力しその制御指令信号に応じて制御対象のポンプ用モータ24bに供給する駆動電流(駆動電圧)をオン・オフ制御(デューティ制御)するものである。詳しくは、モータ制御部42は、マイクロプロセッサ41からの駆動要求に応じたオン・オフ信号(所定のデューティ比のPWM信号でもよい。)をスイッチ43に送信してポンプ用モータ24bの通電・非通電を制御する。
【0046】
スイッチ43は、ポンプ用モータ24bを回転・停止させるものである。スイッチ43は、直流電源であるバッテリBAT(例えば+12V)とポンプ用モータ24bの一方の端子24b1(ハイサイド側の電源接続端子)との間に直列に接続されてポンプ用モータ24bへの給電・停止を切り替える。スイッチ43は、例えばMOSFET(MOS型電界効果トランジスタ)からなるスイッチング素子で構成されている。
【0047】
電流検出センサ44は、ポンプ用モータ24bに流れている電流を検出するものであり、ポンプ用モータ24bのハイサイド側の電源接続端子24b1とスイッチ43との間に設けられている。電流検出センサ44は、シャント抵抗を備えその抵抗間の電圧(電圧降下)を測定することにより電流を測定する構成となっており、測定結果をマイクロプロセッサ41に出力する。なお、電流検出センサ44は、ホール素子を備え電流を測定するものでもよい。
【0048】
次に図3を参照してポンプ用モータ24bについて説明する。図3は、ポンプ用モータ24bの構成を示す断面図である。ポンプ用モータ24b(50)は、有底円筒形状のモータハウジング51内にアーマチュア52を回動自在に配置した構成となっている。モータハウジング51の内周面には、周方向に1対2個の永久磁石(界磁磁極)53が固定されている。永久磁石53は2対4個で構成するようにしてもよい。
【0049】
アーマチュア52は、回転軸54に固定されたアーマチュアコア52aと、アーマチュアコア52aに巻装されたアーマチュアコイル(電機子巻線)52bとから構成されている。回転軸54の図中右端部は、モータハウジング51に取り付けられた軸受55によって回動自在に支持されており、アーマチュア52はモータハウジング51内に回動自在に内装される。アーマチュアコア52aは、金属板を複数枚積層して構成されており、回転軸54に固定されている。アーマチュアコア52aの外周には、軸方向に沿って複数のティース52d(図4参照)が凸設されるとともに、互いに隣り合うティース52d間に複数のスロット52cが凹設されている。スロット52c間には巻線56が重巻にて巻装される。この巻線56によって、アーマチュアコア52aの外周にアーマチュアコイル52bが形成される。
【0050】
アーマチュアコア52aの一端側(左端側)には、コンミテータ61が隣接して配置されている。コンミテータ61は、回転軸54に外嵌固定されている。コンミテータ61の外周面には、導電材にて形成されたコンミテータ片(整流子片)61aが複数枚(アーマチュアコイル52bと同数)取り付けられている。コンミテータ片61aは軸方向に長い板状の金属片からなり、互いに絶縁された状態で周方向に沿って並列状に固定されている。各コンミテータ片61aのアーマチュアコア52a側の端部には、ライザ63が形成されている。ライザ63には、アーマチュアコイル52bの巻き始め端部と巻き終り端部となる巻線56が巻回され、フュージングにより固定されている。これにより、コンミテータ片61aとこれに対応するアーマチュアコイル52bとが電気的に接続される。
【0051】
モータハウジング51の開口端には、モータカバー64がその開口端を閉塞するように取り付けられている。モータカバー64内には、回転軸54の中央部を回転自在に支持する軸受68が固定されている。モータカバー64の図中右内側には、周方向6箇所に3対のブラシホルダ65が対向配置されており、ポンプ用モータ24bは6並列回路6ブラシ構成となっている。ブラシホルダ65には、それぞれブラシ66(66a〜66f)が進退自在に内装されている。各ブラシ66は、第1ブラシ66aと第3ブラシ66cと第5ブラシ66eがそれぞれ正極であり、第2ブラシ66bと第4ブラシ66dと第6ブラシ66fがそれぞれ負極である。
【0052】
各ブラシ66の突出先端部(内径側先端部)はコンミテータ61に摺接しており、各ブラシ66はスプリング67によってコンミテータ61に押接されている。各ブラシ66にはピグテール(図示省略)を介してバッテリBAT(図5,6参照)と電気的に接続されている。コンミテータ61には、ピグテールおよび各ブラシ66を介してバッテリBATから電力が供給される。
【0053】
このような電気モータ50では、アーマチュアコイル52bは次のようにして巻装される。図4は、アーマチュア52におけるアーマチュアコイル52bの巻線展開図である。電気モータ50では、アーマチュアコイル52bは重ね巻方式にて巻装され、スロット52c間に3スロット跨ぎにて順次巻装されている。そこで、例えば、巻線56を第1コンミテータ片61a1から巻き始める場合を考えると、まず、第1コンミテータ片61a1のライザ63に巻線56の一端を懸け回し、第1コンミテータ片61a1と巻線56を電気的に接続する。第1コンミテータ片61a1に接続された巻線56は、第18,第1ティース52d18,52d1の間の第1スロット52c1と第3,第4ティース52d3,52d4の間の第4スロット52c4との間に、複数ターン(例えば25ターン)巻回される。第1,第4スロット52c1,52c4間に巻装された巻線56は、その後、第2コンミテータ片61a2に接続され、第1コイル52b1(巻き始めの1コイル)が形成される。
【0054】
電気モータ50においては、第1コイル52b1と同時にその180°反対側の位置に第10コイル52b10(巻き始めの1コイル)を形成する。すなわち、第1コイル52b1の巻装工程と並行する形で、巻線56を第10コンミテータ片61a10から巻き出し、第9,第10ティース52d9,52d10の間の第10スロット52c10と、第12,第13ティース52d12,52d13の間の第13スロット52c13との間に第1コイル52b1と同様に複数ターン(例えば25回)巻回する。そして、第10,第13スロット52c10,52c13間に巻装された巻線56を第11コンミテータ片61a11に接続し、第1コイル52b1と対向した位置に1巻目の第10コイル52b10を形成する。
【0055】
第1,第10コイル52b1,52b10を形成した後、回転軸54を20°回転させ、第1,第10コイル52b1,52b10に続いて2巻目の第2,第11コイル52b2,52b11を形成する。さらに、第2,第11コイル52b2,52b11を形成した後、回転軸を20°回転させ、第2,第11コイル52b2,52b11に続いて3巻目の第3,第12コイル52b3,52b12を形成する。これを繰り返して、第1から第18までのコイル52b1〜52b18を形成する。
【0056】
次に、電気モータ50内の電気回路について図5を参照して説明する。図5は、第1〜第6ブラシ66a〜66fが、第1,4,7,10,13,16コンミテータ片61a1,61a4,61a7,61a10,61a13,61a16にそれぞれ接している場合の一例を示している。バッテリBATの正極は第1、第3および第5ブラシ66a,66c,66eに接続されている。バッテリBATの負極は第2、第4および第6ブラシ66b,66d,66fに接続されている。第1〜第6ブラシ66a〜66fは、コンミテータ片の外周に沿って60度の間隔をおいてかつ正極と負極とが交互に配設されている。
【0057】
第1〜第6ブラシ66a〜66fの磨耗量が所定の限界量に達する前の状態である場合(全ブラシが通電可能である場合)において、バッテリBATの正極と負極との間には、図6(a)にも示すように、以下の6つの直列回路が並列に形成されている。図6(a)、(b)においては、コンミテータ片61aおよびブラシ66を省略している。
【0058】
第1の直列回路は、第1ブラシ66a、第1コンミテータ片61a1、第1〜第3コイル52b1〜52b3、第4コンミテータ片61a4、および第2ブラシ66bをこの順番で直列に接続したものである。第2の直列回路は、第1ブラシ66a、第1コンミテータ片61a1、第18〜第16コイル52b18〜52b16、第16コンミテータ片61a16、および第6ブラシ66fをこの順番で直列に接続したものである。
【0059】
第3の直列回路は、第3ブラシ66c、第7コンミテータ片61a7、第6〜第4コイル52b6〜52b4、第4コンミテータ片61a4、および第2ブラシ66bをこの順番で直列に接続したものである。第4の直列回路は、第3ブラシ66c、第7コンミテータ片61a7、第7〜第9コイル52b7〜52b9、第10コンミテータ片61a10、および第4ブラシ66dをこの順番で直列に接続したものである。
【0060】
第5の直列回路は、第5ブラシ66e、第13コンミテータ片61a13、第12〜第10コイル52b12〜52b10、第10コンミテータ片61a10、および第4ブラシ66dをこの順番で直列に接続したものである。第6の直列回路は、第5ブラシ66e、第13コンミテータ片61a13、第13〜第15コイル52b13〜52b15、第16コンミテータ片61a16、および第6ブラシ66fをこの順番で直列に接続したものである。
【0061】
前述した電気回路の合成抵抗値の導出について説明する。合成抵抗値をRaとする。各コイル52bのインピーダンスをZとすると、第1〜第6直列回路において3つのコイル52bが直列に接続されているので、第1〜第6直列回路の各抵抗値は3Zである。そして、第1〜第6直列回路が並列に接続されているということは、抵抗値3Zの抵抗が6つ並列に接続されているということである。よって、合成抵抗値Raは下記の数1で表される。なお、インピーダンスは、抵抗や自己誘導などの交流に対する全抵抗を示している。
【0062】
【数1】
【0063】
上記数1を解くと、合成抵抗値Raは1/2Zとなる。
さらに、第1〜第6ブラシ66a〜66fのうち第3および第5ブラシ66c,66eの磨耗量が所定の限界量に達した状態である場合(第3および第5ブラシ66c,66eのみが通電不能である場合)において、バッテリBATの正極と負極との間には、図6(b)にも示すように、以下の4つの直列回路が並列に形成されている。
【0064】
第1の直列回路は、第1ブラシ66a、第1コンミテータ片61a1、第1〜第3コイル52b1〜52b3、第4コンミテータ片61a4、および第2ブラシ66bをこの順番で直列に接続したものである。第2の直列回路は、第1ブラシ66a、第1コンミテータ片61a1、第18〜第16コイル52b18〜52b16、第16コンミテータ片61a16、および第6ブラシ66fをこの順番で直列に接続したものである。
【0065】
第3の直列回路は、第1ブラシ66a、第1コンミテータ片61a1、第1〜第9コイル52b1〜52b9、第10コンミテータ片61a10、および第4ブラシ66bをこの順番で直列に接続したものである。第4の直列回路は、第1ブラシ66a、第1コンミテータ片61a1、第18〜第10コイル52b18〜52b10、第10コンミテータ片61a10、および第4ブラシ66bをこの順番で直列に接続したものである。
【0066】
前述した電気回路の合成抵抗値の導出について説明する。合成抵抗値をRbとする。各コイル52bのインピーダンスをZとすると、第1、第2直列回路において3つのコイル52bが直列に接続されているので、第1、第2直列回路の各抵抗値は3Zである。第3、第4直列回路において9つのコイル52bが直列に接続されているので、第3、第4直列回路の各抵抗値は9Zである。そして、第1〜第4直列回路が並列に接続されているということは、抵抗値3Zの2つの抵抗および抵抗値9Zの2つの抵抗が並列に接続されているということである。よって、合成抵抗値Rbは下記の数2で表される。
【0067】
【数2】
【0068】
上記数2を解くと、合成抵抗値Rbは9/8Zとなる。
以上のことから、明らかなように、通電可能なブラシ66の数が減少すると、減少する前と比較して、電気モータ50を始動させた瞬間において、モータ内部抵抗が大きくなることがわかる。すなわち、通電可能なブラシ66の数が減少すると、減少する前と比較して、始動電流が小さくなることがわかる。
【0069】
このことは、図7に示すように、通電可能なブラシの数が減少すると、始動電流値が小さくなることが実験で証明されている。その実験は、6個のブラシ66を有する電気モータ50を使用して行った。6個のブラシ66が全て通電可能な状態、6個のうち1個(例えば第3ブラシ)が通電不能でありすなわち5個のブラシ66が通電可能である状態、および6個のうち2個(例えば第3、第5ブラシ)が通電不能でありすなわち4個のブラシ66が通電可能である状態について、始動電流を測定した。
【0070】
上述したように、電気モータ50を始動させた瞬間には、自己誘導によりインピーダンスが大きくなっているが、電気モータ始動後の所定の低負荷および定回転状態においては、コイル52bのインピーダンスは自己誘導分小さくなる。図8は、電気モータ50に通電した際における電気モータ50に流れている電流(モータ電流)を測定した結果を示している。全ブラシ66(6個)が通電可能である状態の電気モータ50のモータ電流(実線で示す)は、時刻t1に電気モータ50への通電を開始した場合、電気モータ50を始動させた瞬間に電気モータ50には始動電流Ia1が流れる。その後、コイル52bのインピーダンスは自己誘導分小さくなることにより急速にモータ電流は減少し、時刻t1から所定時間経過後である時刻t2には所定の低負荷および定回転状態による定常電流Ibが電気モータ50に流れる。その後、負荷等を変化させないので、定常電流Ibは一定に保たれる。
【0071】
なお、図8においては、破線で示すモータ電流は、全ブラシ66のうち4つが通電可能である状態の電気モータ50のモータ電流を示している。このとき、始動電流はIa2であり、全ブラシ66が通電可能である状態の始動電流Ia1より小さい値である。
【0072】
また、図8に示すように、定常電流Ibは、ブラシ66の数にかかわらず、ほとんど同じであって差がない。これは、以下の理由による。電気モータ50を始動させた瞬間には、自己誘導によりインピーダンスが大きくなっているが、電気モータ始動後の所定の低負荷および定回転状態においては、コイル52bのインピーダンスは自己誘導分小さくなる。よって、コイル52bのインピーダンスは巻線56自身の抵抗値で決定されるとともにその抵抗値は比較的小さい。よって、ブラシ66の故障した数(通電可能なブラシ66の数)によって合成抵抗値にほとんど差はないため、定常電流Ibもほとんど差が生じない。
【0073】
すなわち、図9に示すように、モータトルクが小さく、モータ回転速度が定回転速度(定回転状態)であるとき、全ブラシ66(6個)が通電可能である状態である電気モータ50のモータ電流とモータトルクとの関係を示すg1、全ブラシ66のうち5個が通電可能である状態である電気モータ50のモータ電流とモータトルクとの関係を示すg2、および全ブラシ66のうち4個が通電可能である状態である電気モータ50のモータ電流とモータトルクとの関係を示すg3を、実験で得ることができる。
【0074】
このように関係g1〜g3から、所定の低負荷および定回転状態においては、通電可能なブラシ66の数にかかわらず、定常電流Ibはほとんど同じであることがわかる。
【0075】
なお、負荷(モータトルク)が大きくなると、通電可能なブラシ66の数が少なくなるにしたがって定常電流Ibは大きくなる。
【0076】
また、図9に示すように、モータトルクとモータ回転速度との相関関係は、全ブラシ66(6個)が通電可能である状態のときはf1で示すように最も大きく、通電可能なブラシ66の数が減少するにしたがって小さくなっている。f2は、全ブラシ66(6個)のうち5個のブラシ66が通電可能である状態を示し、f3は、全ブラシ66(6個)のうち4個のブラシ66が通電可能である状態を示している。このように、ブラシ66の数が減少することでモータトルクは減少するが、電気モータ50は回転可能である。
【0077】
上述したことから明らかなように、電気モータ50の通電可能なブラシ66の数が摩耗などによって減少すると、電気モータ50の通電可能なブラシ66の数が減少する前と比較して、電気モータ50を始動させた瞬間に流れている電流である始動電流Iaが低下する。また、電気モータ始動後の所定の低負荷および定回転状態で当該電気モータ50に流れている電流である定常電流Ibは、低負荷であるため、電気モータ50の通電可能なブラシ66が減少しても、電気モータ50の通電可能なブラシ66の数が減少する前と比較してもほとんど差がない。
【0078】
よって、定常電流Ibは始動電流Iaと同様の温度依存性を有するため、環境温度による変動があっても、定常電流Ibと始動電流Iaとは同様に変動するため環境温度による変動をキャンセルできる。よって、始動電流Iaから定常電流Ibを差し引いた値に基づくブラシ摩耗判定手段による判定により、ブラシ摩耗量の限界を精度よく行うことができる。
【0079】
また、始動電流Iaと定常電流Ibとが共通の電流検出センサ44の検出値に基づいて検出されるため、電流検出センサ44の検出ばらつきや電源電圧(バッテリBAT)の変動があっても、検出される定常電流Ibと始動電流Iaとは同様に変動するため電流検出センサ44の検出ばらつきや電源電圧の変動をキャンセルできる。よって、始動電流Iaから定常電流Ibを差し引いた値に基づくブラシ摩耗判定手段による判定により、ブラシ摩耗量の限界を精度よく行うことができる。
【0080】
次に、上記のように構成したブレーキECU16の作動について図10に示すフローチャートを参照して説明する。ブレーキECU16は、図示しないイグニッションスイッチがオンされると、液圧ブレーキ装置の制御プログラムの実行を開始する。ブレーキECU16は、ステップ102において、電気モータ50が始動されるか否かを判定し、始動されないと判定した場合は、ステップ102の処理を繰り返し実行する。始動されると判定した場合は、ブレーキECU16は、ステップ104にて、電流検出センサ44によって、電気モータ50を始動させた瞬間に当該電気モータ50に流れている電流である始動電流Iaを検出する(始動電流検出手段)。
【0081】
次に、ブレーキECU16は、電気モータ50の始動時点(図8の時刻t1)から所定時間(図8のΔT(例えば0.05秒))経過した時点(図8の時刻t2)の定常電流Ibを検出する。具体的には、ブレーキECU16は、ステップ106において、電気モータ50の始動時点(図8の時刻t1)からの経過時間を計時する。ブレーキECU16は、ステップ108において、計時した経過時間が所定時間ΔTより大きいか否かを判定する。なお、所定時間ΔTは、始動電流が流れなくなるのにかかる時間に設定されている。
【0082】
ブレーキECU16は、所定時間ΔT未満であると判定した場合には、ステップ108にて「NO」と判定し、所定時間ΔTより大きいと判定するまで、ステップ106,108の処理を繰り返し実行する。ブレーキECU16は、所定時間ΔTより大きいと判定した場合には、ステップ110にて、電流検出センサ44によって、電気モータ始動後の所定の低負荷及び定回転状態において当該電気モータ50に流れている電流である定常電流Ibを検出する(定常電流検出手段)。
【0083】
ブレーキECU16は、ステップ104(始動電流検出手段)により検出された始動電流Iaからステップ110(定常電流検出手段)により検出された定常電流Ibを差し引いた値(ΔI)が所定の閾電流値より小さい場合に、ブラシ66の摩耗量が限界量に達したことを判定する(ブラシ摩耗判定手段)。
【0084】
なお、「ブラシ66の摩耗量が限界量に達した」とは、電気モータ50が有するブラシ66が全て通電可能な状態ではなくなり、1以上のブラシ66が通電不能な状態となっている状態のことを示している。また、上述したように通電不能となったブラシ66が発生したとき通電可能な状態で残っているブラシ66の数に応じて始動電流Iaが変化するので、閾電流値は、通電可能なブラシ66の残存数に応じた値に設定されている。
【0085】
具体的には、ブレーキECU16は、ステップ112において、始動電流Iaから定常電流Ibとの差であるΔIを算出する。ブレーキECU16は、ステップ114において、算出した差ΔIが閾電流値より小さいか否かを判定する。ブレーキECU16は、差ΔIが閾電流値より小さいと判定した場合には、ステップ114にて「YES」と判定し、ブラシ66の摩耗量が限界量に達したことを判定する(ステップ116)。例えば、図8の破線で示すように、時刻t1での始動電流IaがIa2である場合には、差ΔI2は、始動電流Ia2と定常電流Ibとの差となる。差ΔI2は閾電流値より小さいため、ブラシ66の摩耗量が限界量に達したと判定される。
【0086】
一方、ブレーキECU16は、差ΔIが閾電流値以上であると判定した場合には、ステップ114にて「NO」と判定し、ブラシ66の摩耗量が限界量に達していないことを判定する(ステップ118)。例えば、図8の実線で示すように、時刻t1での始動電流IaがIa1である場合には、差ΔI1は、始動電流Ia1と定常電流Ibとの差となる。差ΔI1は閾電流値より大きいため、ブラシ66の摩耗量が限界量に達していないと判定される。
【0087】
このように、上述したように通電不能となったブラシ66が発生したとき通電可能な状態で残っているブラシ66の数が減少するにしたがって始動電流Iaも減少するので、差ΔIと通電可能なブラシ66の残存数に応じた値に設定されている閾電流値とを比較することで、残存する通電可能なブラシ66がブラシ摩耗量の限界に達しているか否かを精度よく判定することができる。
【0088】
上述した説明から明らかなように、本実施形態によれば、始動電流検出手段(ステップ104)が、電気モータ50を始動させた瞬間に当該電気モータ50に流れている電流である始動電流Iaを検出する。定常電流検出手段(ステップ110)が、電気モータ始動後の所定の低負荷及び定回転状態において当該電気モータ50に流れている電流である定常電流Ibを検出する。そして、ブラシ摩耗判定手段(ステップ112〜116)が、始動電流検出手段により検出された始動電流Iaから定常電流検出手段により検出された定常電流Ibを差し引いた値ΔIが所定の閾電流値より小さい場合に、ブラシの摩耗量が限界量に達したことを判定する。
【0089】
詳しくは、電気モータ50の通電可能なブラシ66の数が摩耗などによって減少すると、電気モータ50の通電可能なブラシ66の数が減少する前と比較して、電気モータ50を始動させた瞬間に流れている電流である始動電流Iaが低下する。また、電気モータ始動後の所定の低負荷および定回転状態で当該電気モータ50に流れている電流である定常電流Ibは、低負荷であるため、電気モータ50の通電可能なブラシ66が減少しても、電気モータ50の通電可能なブラシ66の数が減少する前と比較してもほとんど差がない。
【0090】
ここで、定常電流Ibは始動電流Iaと同様の温度依存性を有する。よって、環境温度による変動があっても、定常電流Ibと始動電流Iaとは同様に変動するため環境温度による変動をキャンセルできる。したがって、始動電流Iaから定常電流Ibを差し引いた値ΔIに基づくブラシ摩耗判定手段による判定により、ブラシ摩耗量の限界を精度よく行うことができる。これにより、電気モータ用のブラシ摩耗判定装置において、環境温度のばらつきによる誤判定を抑制することができる。
【0091】
また、始動電流検出手段および定常電流検出手段は、電気モータ50に流れている電流を検出するための共通の電流検出センサ44を有して構成され、電流検出センサ44の検出値に基づいてそれぞれ始動電流Iaおよび定常電流Ibを検出する。これにより、始動電流Iaと定常電流Ibとが共通の電流検出センサ44の検出値に基づいて検出されるため、電流検出センサ44の検出ばらつきや電源電圧の変動があっても、検出される定常電流Ibと始動電流Iaとは同様に変動するため電流検出センサ44の検出ばらつきや電源電圧(バッテリ)BATの変動をキャンセルできる。よって、始動電流Iaから定常電流Ibを差し引いた値に基づくブラシ摩耗判定手段による判定により、ブラシ摩耗量の限界を精度よく行うことができる。これにより、電気モータ用のブラシ摩耗判定装置において、電流検出センサ44の検出ばらつきや電源電圧(バッテリ)BATの変動による誤判定を抑制することができる。
【0092】
また、電気モータ50は、電気モータ50の始動から所定時間経過後に低負荷および定回転状態となる場合がある。そこで、上記の実施形態においては、電気モータ50の始動(時刻t1)からの経過時間を計時する計時手段(ステップ106)を備え、定常電流検出手段(ステップ110)は、計時手段により計時された計時時間が所定時間となったタイミング(時刻t2)において電気モータ50に流れている電流を定常電流Ibとして検出する。これにより、電気モータ50の低負荷および定回転状態を検出することなく(専用の検出装置を設けることなく)、定常電流Ibを検出することができ、電気モータ用のブラシ摩耗判定装置を簡素に構成することができる。
【0093】
なお、上述した実施形態においては、イニシャルチェックなどの特定のモードでなく、通常に電気モータ50が始動した時点から所定時間経過の時点にて定常電流Ibを検出するように構成しているが、これに代えて、イニシャルチェックなど必ず電気モータ50が始動される特定のモードにて、所定のタイミングから所定時間経過の時点にて定常電流Ibを検出するように構成するようにしてもよい。
【0094】
具体的には、ブレーキECU16は、イグニッションスイッチがオンされると、イニシャルチェックを開始する。イニシャルチェックでは、各弁21,22a,22b,23a,23b,31,32a,32b,33a,33b、ポンプ用モータ24bなどの異常の有無を確認する。このイニシャルチェックの一環においてブラシ摩耗判定を行う。
【0095】
この場合のブレーキECU16の作動について図11に示すフローチャートを参照して説明する。図10のフローチャートと同一の処理には同一の符号を付してその説明を省略する。ブレーキECU16は、図示しないイグニッションスイッチがオンされると、液圧ブレーキ装置の制御プログラムの実行を開始する。ブレーキECU16は、ステップ202において、イグニッションスイッチのオン時点からの経過時間を計時する。
【0096】
電気モータ50のイニシャルチェックは、イグニッションスイッチのオン時点から時間をおかない時点で開始される。よって、ブレーキECU16は、ステップ206において、イニシャルチェックに係る電気モータ50の始動がなされたか否かを判定し、始動がなされないと判定した場合は、プログラムをステップ210に進める。始動がなされたと判定した場合は、ブレーキECU16は、ステップ208にて、電流検出センサ44によって、電気モータ50を始動させた瞬間に当該電気モータ50に流れている電流である始動電流Iaを検出する(始動電流検出手段)。
【0097】
ブレーキECU16は、ステップ204において、始動電流Iaが検出済みであるか否かを判定するので、始動電流Iaが一旦検出されると、ステップ204にて「YES」と判定し、プログラムをステップ210に進める。
【0098】
ブレーキECU16は、イグニッションスイッチのオン時点以降に電気モータ50が始動されその始動電流Iaが検出された後に、イグニッションスイッチのオン時点からの経過時間が所定時間より大きくなった場合には、ステップ210で「YES」と判定し、プログラムをステップ110以降に進める。ブレーキECU16は、ステップ110において、電気モータ始動後の所定の低負荷及び定回転状態において当該電気モータ50に流れている電流である定常電流Ibを検出する(定常電流検出手段)。なお、所定時間は、イグニッションスイッチオンの時点と電気モータ50の始動の時点との関係、始動電流が流れなくなるのにかかる時間などを考慮して設定されている。
【0099】
そして、ブレーキECU16は、上述したステップ112〜118の処理によって、ステップ208(始動電流検出手段)により検出された始動電流Iaからステップ110(定常電流検出手段)により検出された定常電流Ibを差し引いた値(ΔI)が所定の閾電流値より小さい場合に、ブラシ66の摩耗量が限界量に達したことを判定する(ブラシ摩耗判定手段)。
【0100】
これによれば、車両に搭載されている電気モータ50はイニシャルチェックにおいて始動される。また、その電気モータ50にイニシャルチェックが適用される場合には、電気モータ50はイニシャルチェックに係る所定のタイミング(イグニッションスイッチのオン時点)から所定時間経過後に低負荷および定回転状態となる。そこで、車両のイニシャルチェックの開始に係る所定のタイミングからの経過時間を計時する計時手段(ステップ202,210)を備え、定常電流検出手段(ステップ110)は、計時手段により計時された計時時間が所定時間となったタイミングにおいて電気モータ50に流れている電流を定常電流Ibとして検出する。これにより、電気モータ50の低負荷および定回転状態を検出することなく(専用の検出装置を設けることなく)、定常電流Ibを検出することができ、電気モータ用のブラシ摩耗判定装置を簡素に構成することができる。
【0101】
なお、イニシャルチェックに係る所定のタイミングは、イグニッションスイッチのオン時点だけでなく、他にドアを開ける時点などがある。
また、上述した実施形態においては、本発明を液圧ブレーキ装置に設けられた電気モータに適用したが、車両に搭載された電動ブレーキ装置に設けられた電気モータに適用することもできる。なお、電動ブレーキ装置は、液圧ブレーキ装置のホイールシリンダの油圧の代わりに電気モータによる押圧を使用するものである。なお、車両に搭載されたその他の電気モータにも適用することも可能である。
【符号の説明】
【0102】
11…ブレーキペダル、12…真空式制動倍力装置、13…マスタシリンダ、14…リザーバタンク、15…ブレーキアクチュエータ、16…ブレーキECU(始動電流検出手段、定常電流検出手段、ブラシ磨耗判定手段、計時手段)、21,31…差圧制御弁、22…左後輪液圧制御部、23…右前輪液圧制御部、24…第1減圧部、32…左前輪液圧制御部、33…右後輪液圧制御部、34…第2減圧部、40…駆動制御回路、41…マイクロプロセッサ、42…モータ制御部、43…スイッチ、44…電流検出センサ、50…電気モータ、52b…アーマチュアコイル(コイル)、61a…コンミテータ片、66…ブラシ、Wfl,Wfr,Wrl,Wrr…車輪、Sfl,Sfr,Srl,Srr…車輪速度センサ、WCfl,WCfr,WCrl,WCrr…ホイールシリンダ。
【特許請求の範囲】
【請求項1】
車両に搭載されるブラシ付きの電気モータ(50)に適用され、ブラシ(66)の摩耗量が所定の限界量に達したことを判定する電気モータ用のブラシ摩耗判定装置(16)において、
前記電気モータを始動させた瞬間に当該電気モータに流れている電流である始動電流を検出する始動電流検出手段(16、ステップ104,208)と、
前記電気モータ始動後の所定の低負荷及び定回転状態において当該電気モータに流れている電流である定常電流を検出する定常電流検出手段(16、ステップ110)と、
前記始動電流検出手段により検出された始動電流から前記定常電流検出手段により検出された定常電流を差し引いた値が所定の閾電流値より小さい場合に、前記ブラシの摩耗量が前記限界量に達したことを判定するブラシ摩耗判定手段(16、ステップ112〜116)と、
を備えていることを特徴とする電気モータ用のブラシ摩耗判定装置。
【請求項2】
請求項1において、
前記始動電流検出手段および前記定常電流検出手段は、
前記電気モータに流れている電流を検出するための共通の電流検出センサ(44)を有して構成され、前記電流検出センサの検出値に基づいてそれぞれ前記始動電流および前記定常電流を検出することを特徴とする電気モータ用のブラシ摩耗判定装置。
【請求項3】
請求項1または請求項2において、
前記電気モータの始動からの経過時間を計時する計時手段(ステップ106,108)を備え、
前記定常電流検出手段は、前記計時手段により計時された計時時間が所定時間となったタイミングにおいて前記電気モータに流れている電流を前記定常電流として検出することを特徴とする電気モータ用のブラシ摩耗判定装置。
【請求項4】
請求項1または請求項2において、
前記車両のイニシャルチェックの開始に係る所定のタイミングからの経過時間を計時する計時手段(ステップ202,210)を備え、
前記定常電流検出手段は、前記計時手段により計時された計時時間が所定時間となったタイミングにおいて前記電気モータに流れている電流を前記定常電流として検出することを特徴とする電気モータ用のブラシ摩耗判定装置。
【請求項1】
車両に搭載されるブラシ付きの電気モータ(50)に適用され、ブラシ(66)の摩耗量が所定の限界量に達したことを判定する電気モータ用のブラシ摩耗判定装置(16)において、
前記電気モータを始動させた瞬間に当該電気モータに流れている電流である始動電流を検出する始動電流検出手段(16、ステップ104,208)と、
前記電気モータ始動後の所定の低負荷及び定回転状態において当該電気モータに流れている電流である定常電流を検出する定常電流検出手段(16、ステップ110)と、
前記始動電流検出手段により検出された始動電流から前記定常電流検出手段により検出された定常電流を差し引いた値が所定の閾電流値より小さい場合に、前記ブラシの摩耗量が前記限界量に達したことを判定するブラシ摩耗判定手段(16、ステップ112〜116)と、
を備えていることを特徴とする電気モータ用のブラシ摩耗判定装置。
【請求項2】
請求項1において、
前記始動電流検出手段および前記定常電流検出手段は、
前記電気モータに流れている電流を検出するための共通の電流検出センサ(44)を有して構成され、前記電流検出センサの検出値に基づいてそれぞれ前記始動電流および前記定常電流を検出することを特徴とする電気モータ用のブラシ摩耗判定装置。
【請求項3】
請求項1または請求項2において、
前記電気モータの始動からの経過時間を計時する計時手段(ステップ106,108)を備え、
前記定常電流検出手段は、前記計時手段により計時された計時時間が所定時間となったタイミングにおいて前記電気モータに流れている電流を前記定常電流として検出することを特徴とする電気モータ用のブラシ摩耗判定装置。
【請求項4】
請求項1または請求項2において、
前記車両のイニシャルチェックの開始に係る所定のタイミングからの経過時間を計時する計時手段(ステップ202,210)を備え、
前記定常電流検出手段は、前記計時手段により計時された計時時間が所定時間となったタイミングにおいて前記電気モータに流れている電流を前記定常電流として検出することを特徴とする電気モータ用のブラシ摩耗判定装置。
【図1】

【図2】
【図3】

【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【公開番号】特開2013−21873(P2013−21873A)
【公開日】平成25年1月31日(2013.1.31)
【国際特許分類】
【出願番号】特願2011−154905(P2011−154905)
【出願日】平成23年7月13日(2011.7.13)
【出願人】(301065892)株式会社アドヴィックス (1,291)
【Fターム(参考)】
【公開日】平成25年1月31日(2013.1.31)
【国際特許分類】
【出願日】平成23年7月13日(2011.7.13)
【出願人】(301065892)株式会社アドヴィックス (1,291)
【Fターム(参考)】
[ Back to top ]