
電気動力を発生させるための携帯用メカトロニクス装置
電気動力を発生させるための携帯用メカトロニクス装置は、ハウジング内に、移動式の端末などの携帯用アイテムを充電するためのバッテリーに電気的に接続されるアクチュエータを含む。例えばハウジングを運ぶ歩行者による振動運動を受ける第1部材と、質量部分の少なくとも一部を構成する第2部材とを有する回転アクチュエータにおいて、質量部分は、第1部材に対して電機子の軸のまわりに振動することができる。サーボ制御システムは、時にはバッテリーによって又は質量部分が自由に移動することを可能にすることによって供給されるモータとして、時には質量部分の運動速度を第1部材の振動運動の加速度に連動させることによってバッテリーを充電する発生器として、アクチュエータを制御することができる。これは、歩行者からできるだけ多くの電気動力を回収することを可能にする。

【発明の詳細な説明】
【技術分野】
【0001】
本発明は、反対方向における加速度を有するシステムの自然振動運動からの動力の回収に基づいて電気動力を発生させる方法及び装置に関する。自然振動運動システムは、例えば歩行者が運ぶ歩行者の腰に掛けられた前記装置のハウジングである。
【背景技術】
【0002】
2005年10月2日〜6日に香港で開催されたIEEEの産業応用部門(IAS)の年次会合のCDROM議事録のエム・ルエラン(M.Ruellan)、エス・ツリ(S.Turri)、ハミド・ベン・アハメド(Hamid Ben Ahmed)及びビ・ムルトン(B.Multon)による論文「電磁共鳴発生器」は、永久磁石誘導子が箱に固定され、電機子がばねを減衰させることにより箱に連結された移動式の質量部分に固定される管状構造を有する同期電磁気線形アクチュエータを有する電気動力発生器システムを開示する。電機子は、電気動力貯蔵手段に電気的に接続される。装置の箱は、歩行者の臀部のレベルにおいて運ばれ、該歩行者の運動は実質的に正弦波と考えられる。アクチュエータは、移動式の質量部分に対して受動的であり、再充電のための電気発生器、例えばセル方式の電話のバッテリーなどの例えば電気動力貯蔵手段として作動するのみである。回収される動力は、歩行者の歩みの頻度とともに増加する。
【発明の概要】
【発明が解決しようとする課題】
【0003】
人体の自然移動などの自然移動において、その振動は低周波である。そのような状態において、前述した論文に従って前記発生器システムによって回収される動力は、非常に低い。従って、歩行者によって臀部において運ばれるそのような電磁気発生器システムを用いて回収される平均動力は、移動式の質量部分が50gで一秒当たり2歩のペースにおいて40mWより低い。
【0004】
本発明は、電気動力貯蔵手段に電気的に接続され、振動速度運動を受けることができる第1部材及び該第1部材に対して速度について振動することができる質量部分の少なくとも一部を構成する第2部材を有するアクチュエータを用いて電気動力を発生させる方法を用いて前述した欠点を克服する。
【課題を解決するための手段】
【0005】
そのような方法は、アクチュエータの作動サイクルの一部の間、貯蔵手段を充電する発生器としてアクチュエータを制御するために、第1部材の振動運動に対する質量部分の運動をサーボ制御することを有し、質量部分は、アクチュエータの作動サイクルの別の一部の間、自由に移動する。
【0006】
第1部材及び第2部材は、例えば、磁石同期回転機械の種類のアクチュエータの周囲の電機子及び中心の誘導子である。大型機械においては、磁石は、電磁石によって取り換えられ得る。
【0007】
本発明に係るアクチュエータは、例えば携帯用アイテムのバッテリーを再充電するための電気動力を発生させるために設けられ、該アクチュエータは次に、携帯用アイテムのバッテリーに接続される電気動力貯蔵手段を充電するための発生器として作動する。質量部分は次に、アクチュエータの作動サイクルの別の一部の間、自由に移動することができる。
【0008】
本発明はまた、電気動力貯蔵手段(16、26)に電気的に接続され、振動速度運動を受けることができる第1部材(11、21)及び該第1部材に対して速度について振動することができる質量部分(13、23)の少なくとも一部を構成する第2部材(12、22)を有するアクチュエータ(11−12、21−22)を用いて電気動力を発生させる方法に関する。
【0009】
そのような方法は、アクチュエータの作動サイクルの一部の間、貯蔵手段を充電する発生器としてアクチュエータを制御するために、第1部材の振動運動に対する質量部分の運動をサーボ制御することと、アクチュエータ(11−12、21−22)の作動サイクルの別の一部の間、貯蔵手段によって供給されるモータとしてアクチュエータを制御するために、第1部材の振動運動に対する質量部分の運動をサーボ制御することとを有する点において特有である。
【0010】
歩行者が運ぶ質量部分を備えたアクチュエータなどの自然振動運動システムからできるだけ多くの電気動力を回収するために、アクチュエータの作動は、アクチュエータの作動サイクルの別の一部が貯蔵手段によって供給されるモータとしてアクチュエータを制御するために第1部材の振動運動に対する質量部分の運動のサーボ制御を含み得るように可逆的である。そのような場合、アクチュエータは、自然振動システムの振動運動を受ける第1部材の振動運動へのサーボ制御の後に、質量部分を加速させるためにモータとして、あるいは質量部分の運動動力を回収するために発生器として作動する。そのようなサーボ制御は、従来技術による受動的アクチュエータを用いたものより、より多くの動力が回収されることを可能にする。
【0011】
特に、サーボ制御システムは、質量部分の運動速度が第1部材の加速度に連動(slave)させられることを必要とすることが生じ得る。
【0012】
そのようなサーボ制御によって、本発明の方法は、移動システムからできるだけ多くの動力を引き出すのに役立つと同時に、アクチュエータによって発生させられ得る重量、振動及び騒音のための不快感が歩行者にほとんどないことを確保する。質量部分の偏位(deflection)が大きいほど及び/又は質量部分が受ける加速度が強いほど、自然振動システムの振動運動が一層遅くなるときに回収される動力が高くなる。
【0013】
前記方法は、例えばセル方式の移動式の端末を供給する小型蓄電池などの電気動力貯蔵手段を再充電するための移動式の質量の人工運動をより迅速に実行することを通じて、本来小さい運動を有するシステムにおいて動力を引き出すのに役立つ。この目的のために、アクチュエータの作動サイクルは、所定の方向と反対側の方向に従った第1部材の加速度の増加の間、所定の方向に従った質量部分の運動速度を増加させるためのモータとしてのアクチュエータの作動段階と、反対側の方向に従った第1部材の加速度の減少の間、所定の方向に従った質量部分の運動速度を減少させるための発生器としてのアクチュエータの作動段階と、所定の方向に従った第1部材の加速度の増加の間、反対側の方向に従った質量部分の運動速度を増加させるためのモータとしてのアクチュエータの作動段階と、所定の方向に従った第1部材の加速度の減少の間、反対側の方向に従った質量部分の運動速度を減少させるための発生器としてのアクチュエータの作動段階とを有し得る。
【0014】
時間に応じて質量部分の速度のために与えられる変化は、例えば実質的に正弦波、台形、又はハウジングの加速度と同じ種類であり得る。
【0015】
電気動力貯蔵手段による動力の回収をより良く最適化するために、その方向がどんな方向であっても質量部分の運動速度は、誘導子の加速度の最大絶対値と同期して保持され得る。他の部分において記載されるように、アクチュエータの作動サイクルは、第1部材の加速度が最大値のあたりで変化するときに質量部分の運動速度を増加及び減少させるためのモータとしてのアクチュエータのための作動段階を有し得る。
【0016】
本発明の目的はまた、電気動力貯蔵手段に電気的に接続され、振動速度運動を受けることができる第1部材及び該第1部材に対して速度について振動することができる質量部分の少なくとも一部を構成する第2部材を有するアクチュエータを含む電気動力発生装置を提供することである。前記装置は、アクチュエータの作動サイクルの一部の間、質量部分の運動を第1部材の振動運動に連動させることによって、貯蔵手段を充電する発生器としてアクチュエータを制御するためのサーボ制御手段を有することを特徴とする。
【0017】
サーボ制御手段はまた、アクチュエータの作動サイクルの別の一部において、貯蔵手段によって供給されるモータとしてアクチュエータを制御することができる。より少ない電気動力を発生させることができるより経済的な代替形態によれば、アクチュエータが供給されず、質量部分は、アクチュエータの作動サイクルの別の一部の間、自由に移動することができる。
【0018】
さらに具体的に言えば、サーボ制御手段は、第1部材の加速度を測定するための手段と、質量部分の運動速度を測定するための手段と、質量部分の運動速度を第1部材の加速度に連動させるためにアクチュエータを制御する手段とを有し得る。前記連動させられる手段は、測定された第1部材の加速度と第1部材の位置に応じて可変する設定点に対して測定された質量部分の運動速度とに応じてパラメータを補正するための手段と、アクチュエータから回収される、又はアクチュエータに供給される電気動力の変化を、補正されたパラメータに従って貯蔵手段の端子における電流及び電圧に向かわせるように適合させるための可逆的増幅アンジュレータ(amplifier-undulator)とを有し得る。
【0019】
質量部分の運動とアクチュエータの種類との種々の組合せは、本発明の装置を実現するのに役立ち得る。第1の実施形態によれば、質量部分の運動は線形である一方、アクチュエータの運動は線形又は回転である。動力が引き出される自然振動は垂直であり得る又は別の方向に従って方向づけられ得る。
【0020】
第2の実施形態によれば、質量部分の運動は回転であり、アクチュエータは回転する。そのような第2の実施形態では、サーボ制御手段は、より多くの動力を引き出すために、第1部材の最大角速度より大きい公称速度のあたりに質量速度の運動速度を変更することが可能であり得る。この第2の実施形態では、歩行者の快適さを改善するために、アクチュエータの第1部材は、自然振動運動システムに固定され、例えば少なくとも1つのボールベアリングなどの分離手段によって第1部材から回転可能に分離されるハウジングによって支持され得る。
【0021】
アクチュエータが自然振動運動システムから動力を引き出すように、また装置の小型化を増進するようにより良く役立つために、装置は、アクチュエータがモータとして作動するときに質量部分を加速させるようにアクチュエータを補助するための、アクチュエータを支持するハウジングに固定される弾性手段を有し得る。質量部分と弾性手段のサーボ制御はそのとき、質量部分の運動速度に関連するだけでなく、弾性手段の剛性、及び/又は、例えばアクチュエータの軸に正反対(diametrical)であるロッド上において移動可能であるカウンターウェイトの運動にも関連し得る。
【0022】
移動する質量部分の慣性モーメントを調節することはまた、回転軸について液体を移動させることを通じて起こることができるのに対し、弾性手段は、圧縮性流体の圧力に作用して調節される剛性を有する圧縮性流体を通じてそれ自体具体化することができる。
【0023】
本発明の他の特徴及び利点は、対応する添付図面を参照して非制限的な実施例として付与される本発明の幾つかの実施形態についての以下の記載を読むことからより明確に明らかとなるであろう。
【図面の簡単な説明】
【0024】
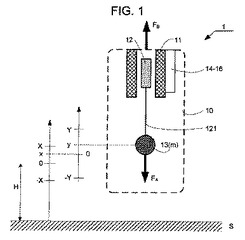
【図1】本発明の第1の実施形態に係る電気動力発生装置の概略軸方向断面図である。
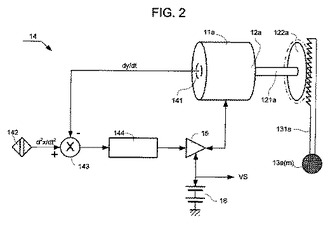
【図2】第1の実施形態の代替形態に係る回転アクチュエータの誘導子のための回転速度サーボ制御システムのブロック図である。
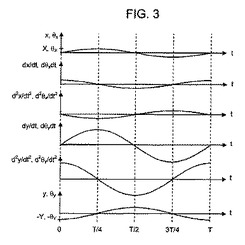
【図3】時間に応じた電気動力発生装置のハウジング及び質量部分の正弦波運動位置、並びにそれらの速度及び加速度に関する6つのグラフを示す図である。
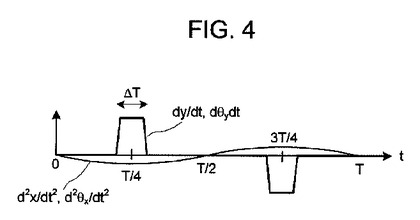
【図4】ハウジングの正弦波加速度に連動させられる本発明に係る前記質量部分の速度の最適変化を示す図である。
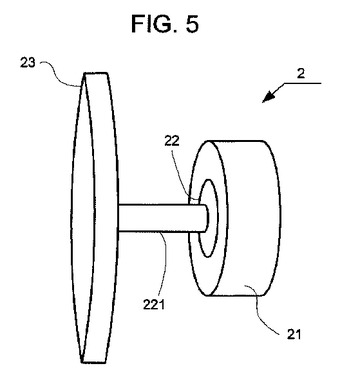
【図5】本発明の第2の実施形態に係る電気動力発生装置の回転アクチュエータの斜視図である。
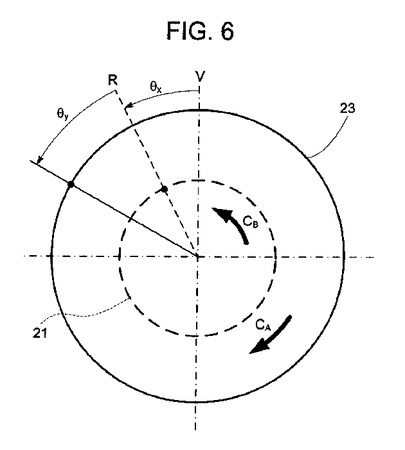
【図6】本発明の第2の実施形態に係る電気動力発生装置の回転アクチュエータの正面概略図である。
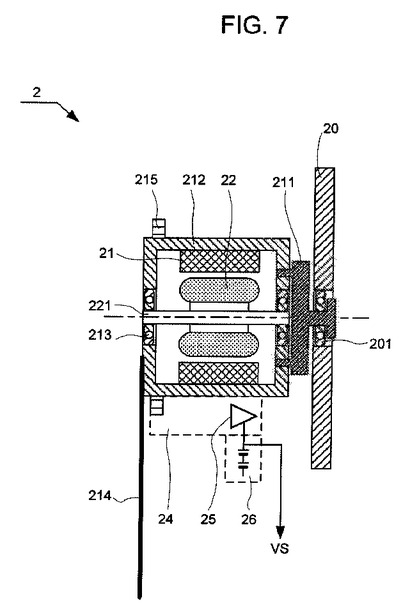
【図7】第2の実施形態に係る電気動力発生装置の軸方向断面図である。
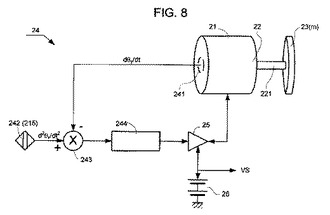
【図8】第2の実施形態に係る回転アクチュエータの誘導子の回転速度サーボ制御システムのブロック図である。
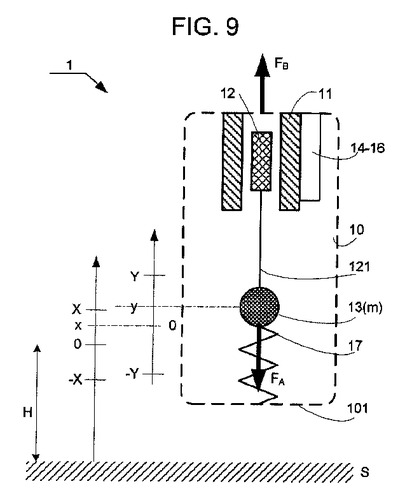
【図9】図1と類似しているが、第1の実施形態の代替形態に係る圧縮ばねを備えた図である。
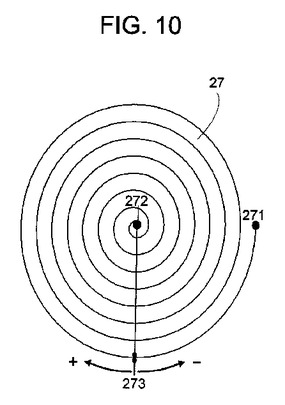
【図10】別の第2の実施形態のための螺旋ばねを示す図である。
【発明を実施するための形態】
【0025】
図1及び図2を参照すると、本発明の第1の実施形態に係るメカトロニクス電気動力発生装置1は、電磁気アクチュエータ11−12、移動式の質量部分13及び電気回路14−16を囲むハウジング10を含む。電気回路の主要構成要素は、アクチュエータを制御する電子サーボ制御システム14、可逆的増幅アンジュレータ15、及び蓄電池又は超コンデンサなどの小型電気動力貯蔵装置16である。
【0026】
アクチュエータ11−12は可逆的である。サーボ制御システム14の制御の下で、アクチュエータは、電気動力を、移動式の質量部分13を付勢する機械動力に変換するための電圧源としての電気動力貯蔵装置16によって供給されるときに電気モータとして、又は、移動式の質量部分の運動から生じる機械動力を、出力電圧VSを供給することができる貯蔵装置に貯蔵される電気動力に変換するための電気発生器として作動する。
【0027】
図1に示す実施形態によれば、アクチュエータは同期線形であり、2つの主要部材、すなわちハウジング10の内部に固定されるコイルを備えた円筒形電機子11と、電機子11内において垂直軸方向移動に滑動することができる永久磁石を備えた円筒形誘導子12とを有する。誘導子12は、下端部の近くに軸棒121を通じて移動式の質量部分13を支持する。
【0028】
線形アクチュエータの代替形態によれば、電機子と誘導子の相対位置は反対にすることができる。電機子が中心に位置して軸棒121に固定され、増幅アンジュレータ15にブラシをこすりつけることによって接続される。誘導子は、周囲に位置して電機子を囲む。
【0029】
図2に示す代替形態によれば、アクチュエータは、永久磁石を備えた円筒形固定電機子11aと、電機子11aに回転可能に取り付けられるコイル円筒形回転誘導子12aと、を含む直流回転機械である。アクチュエータ11a−12aの実施例は、図7及び図8を参照してさらに詳細に記載される。この代替形態の質量部分13aは、該質量部分に固定される下端部を有するとともに軸棒121aの端部に固定される歯車122aに噛み合うラック131aを用いて、誘導子12aの軸棒121aに垂直に移動可能である。
【0030】
ハウジング10は、移動システムによって運ばれ、該移動システムから2つの反対の方向に従った加速を受ける。後に記載される実施例によれば、移動システムは、ハウジングを腰に固定して運ぶ歩行者である。ハウジング10は次に、歩行者の歩みによって発生させられ2つの反対方向に従った加速によって特徴づけられる実質的に垂直な平面における振動運動を受ける。別の実施例によれば、移動システムは、うねりの影響下で横揺れ及び/又は縦揺れから生じる振動運動を受けるボートである。
【0031】
図1に示す質量部分13は、例えばバッテリーが電気動力貯蔵装置16自体の少なくとも一部である移動式のセル方式の端末又はウォークマンの全部又は一部、あるいはキーホルダ又は財布などの何か他の物である。質量部分は、クリップ又はフックと環状に編まれたテープ、あるいは磁石と鉄の種類の軸棒121上の留め具を通じてアクチュエータから取り外され得る。
【0032】
図1に示す実施形態の代替形態によれば、質量部分がメカトロニクス装置の少なくとも非常に重い構成要素によって構成され、ハウジングは逆さまにされ、ハウジング10、アクチュエータ11−12及び電気回路14−16を有するアセンブリは、アクチュエータの軸棒121によって歩行者の腰から掛けられる。そのとき更なる質量は無用である。そのような代替形態では、加速度計は、アクチュエータの軸棒に固定される。軸棒に対するアクチュエータの速度は、以下にさらに記載されるように測定される。移動式のセル方式の端末又は何か他の物がまた、前述したようにそれをより重くさせるためにハウジングからつるされ得る。
【0033】
図1では、上方への逆向きの矢印は、ハウジング10に腰によって及ぼされる保持力FBを示す。下向きに方向づけられた矢印は、アクチュエータの軸棒121に及ぼされる質量部分の作用FAを示す。地面Sに関連づけられ地面からの高さHに原点を有する座標系に対するハウジング10の位置及びハウジングの運動振幅は、x及びXによって表される。ハウジングに関連づけられた座標系に対する質量部分13の位置及びハウジング内の質量部分の運動振幅は、y及びYによって表される。すべての構成要素を備えたハウジングは質量Mを有し、移動式の質量部分は質量mを有する。
【0034】
本発明によれば、アクチュエータ11−12は、従来技術の受動的発生器を備えたものより、より多くの動力を自動的に引き出すために連動させられる。アクチュエータが、電気発生器として作動する場合、例えば、ハウジング10は、上向きに加速されて座標xは増加し、質量部分13は、慣性の結果として静止したままである傾向を有して座標yは減少する。そのとき発生器は、装置16に貯蔵され得る電気動力を供給する。
【0035】
力FA及びFBは、以下の方程式によって与えられる、すなわち、
FA=mg+(md2x/dt2+md2y/dt2)、
FB=Mg+(M−m)d2x/dt2+(md2x/dt2+md2y/dt2)、
gは、重力加速度である。
【0036】
軸棒121を用いてアクチュエータに供給される瞬時動力PAとハウジングが歩行者の腰に固定される位置において歩行者から引き出される瞬時動力PBとは、以下の「力×速度」の積の形式によって表される、すなわち、
PA(t)=−FAdy/dt、
PB(t)=FBdx/dt。
このような動力は、ハウジング内のあらゆる摩擦を除き、運動全てが周期的であるとし、同じ変数x又はyに依存するこれらの微分積全てが平均してゼロであることを要求すると、同じ平均値Pを有する。そのとき前の動力の平均動力は以下のようになる、すなわち、
P=<PA>=−m<(d2x/dt2)(dy/dt)>、
P=<PB>=m<(d2y/dt2)(dx/dt)>。
【0037】
第1の前の方程式は、発生器として作動するアクチュエータに供給される機械動力が歩行者によってハウジングに与えられる垂直加速度d2x/dt2及びハウジングに対する質量部分の垂直速度dy/dtに依存することを表している。ハウジングに与えられる加速度d2x/dt2が歩行者に依存することを知っているので、本発明は、ハウジングの加速度に質量部分の速度dy/dtを連動させる。質量部分の速度を調節するために、電子サーボ制御システム14は、図2に示すように、速度センサ141、加速度計142、減算乗算器143、補正器144及び可逆的増幅アンジュレータ15を有する。速度センサ141は、誘導子12aの回転速度、すなわち質量部分13a又は13に一体化された誘導子12の移動速度を測定し、それによって質量部分の垂直速度dy/dtに比例する大きさを検知する。例えば、速度センサは、誘導子の巻線において誘導される電圧又はホール効果を通じてあるいは電気光学セルによってアクチュエータを横切る電圧の関数として誘導子の運動速度を検知する。加速度計142は、ハウジング10に固定されてハウジングの実質的に垂直の加速度d2x/dt2を測定する。
【0038】
本発明に係るハウジングの加速度と質量部分の速度の関係によれば、減算乗算器143は、測定されたハウジングの加速度と測定された質量部分の運動速度に応じたパラメータを付与する。減算乗算器は、測定された加速度に、特に加速度と速度の振幅に依存する所定の係数を掛け合わせることによってこのパラメータを得て、測定された垂直速度dy/dtに比例する大きさにおいてその得られた積を減ずる。補正器144は、ハウジングの位置に応じた設定値の値に対して減算乗算器によって供給される差を補正し、補正される差に応じて入力電圧を増幅アンジュレータ15に適用する。補正される差に応じた入力電圧によれば、増幅アンジュレータは、アクチュエータから回収されるあるいはアクチュエータに供給される電気動力の変化を、貯蔵装置16を横切る電流及び電圧に向かうように(direct)適合させるために可逆的である。増幅アンジュレータは、アクチュエータが、電圧源として使用される電気貯蔵装置16を備えた電気モータとして、あるいは貯蔵装置16を充電する電気動力のための電気発生器として作動するように、動力貯蔵装置16及びアクチュエータに電流及び電圧を与えるためにアクチュエータ11−12に接続される。
【0039】
静止時に、質量部分13a又は13は、ハウジングの底面に下ろされ、加速度計がハウジングの運動を検知するときにラック131a又は軸棒121の半ストロークにおいて再び上げられるのみである。代替的に、質量部分は、ハウジングの下部とラック131a又は軸棒121との間に固定された圧縮ばねによって又はハウジングの上部とラック131a又は軸棒121との間に固定された引力ばねによって永久にバランスがとられる。
【0040】
例えば、モータとして作動するアクチュエータがハウジング内の質量部分に実質的に正弦波の運動を与え、ハウジングが地面Sに対して実質的に正弦波のように垂直に移動することが考えられる、すなわち、
x=Xsin(2πft)、
y=Ysin(2πft+φ)、
ここで、fは実質的に正弦波の運動の周波数、φは平均動力を最大にするために−π/2に等しいそれらの間の位相シフトである。P=<PA>において、これは、ハウジングに対する質量部分の速度が地面に対するハウジングの加速度に連動させられることをもたらす。これは、P=<PB>に従って、ハウジングに対する質量部分の加速度を地面に対するハウジングの速度に連動させることを行うことをより容易にする。
【0041】
そのような仮説において、ハウジングの加速度に対する質量部分の速度の依存関係は、以下の通りである、すなわち、
dy/dt=−(Y/2πfX)(d2x/dt2)。
パラメータf及びXは、測定されたハウジングの加速度d2x/dt2から導き出され得る。質量部分の偏位2Yは、偏位が大きくなればなるほど回収される動力が大きくなることを考えるとはいえ限定される。
【0042】
図3は、ハウジング及び質量部分の線形運動が前記のように周期T=1/fで時間とともに実質的に正弦波であるとされる場合、時間tの関数としての座標x及びy、並びにそれらの速度及び加速度の漸進的変化を示す。地面Sに対するハウジングの位置xは、歩行者の運動によって与えられる。ハウジングの速度dx/dt及び加速度d2x/dt2もまた、歩行者によって与えられる、すなわち、
dx/dt=2πfXcos(2πft)、
d2x/dt2=−4π2f2Xsin(2πft)。
【0043】
ハウジングに対する質量部分の速度、すなわち、
dy/dt=2πfYcos(2πft+φ)=2πfYsin(2πft)、
は、以下の関係、すなわち、
dy/dt=−(d2x/dt2)(Y/2πfX)、
に従ってハウジングの加速度d2x/dt2に連動させられる。ハウジング内の質量部分の位置y及びその加速度d2y/dt2はそこから生じる。時間0及びT/2において、ハウジングの速度dx/dtは低いけれども最大であり、質量部分の加速度d2y/dt2は、ハウジングの速度と同じ徴候を備えてそのとき最大であり、従って、装置1は、腰のレベルにおいてかなりの力FB、それ故にかなりの動力PBを利用することができる。引き出される動力は、アクチュエータの軸棒121、121aに瞬時に伝達されず、引き出される動力の一部は最初に運動動力に変換される。
【0044】
例えば、図3によれば、質量部分の運動速度をハウジングの加速度に連動させるサーボ制御システムは、平均動力<PA>がゼロではなく一周期の間に積sin(2πft)cos(2πft+φ)に依存するとき、4つの四分の一の周期に実質的に相当し、やや等しい継続期間を有する電磁アクチュエータ11−12の4つの作動段階を備えたサイクルを有する。半周期T/2の初めに、アクチュエータは第1に、降下に従った、すなわち質量部分の上昇とは反対側の方向に従ったハウジングの下方へ方向づけられた加速度が増加する間、実質的にそのストロークの中心まで増加する速度で質量部分13を持ち上げるために、実質的に時間0からT/4までの間においてモータとして作動する、すなわち、アクチュエータによって消費される電気動力が質量部分の加速度を減少させるために運動動力に変換される。次に、実質的に時間T/4からT/2までの間において、アクチュエータは、上昇を終わらせる質量部分のますます強くなる制動を通じて電気動力に変換される運動動力を回収するために、下方への方向に従ったハウジングの加速度の減少の間、上方への方向に従った質量部分の速度をますます減少させるための電気発生器として作動する。次の半周期の初めに、実質的に時間T/2から3T/4までの間において、質量部分は下に行き、アクチュエータは、上方への方向に従ったハウジングの加速度の増加の間、下方への方向に従った質量部分の速度を増加させるためのモータとして作動する。最後に、実質的に3T/4からTまでの間において、発生器として作動するアクチュエータによって及ぼされる上昇を終わらせるますます強くなる質量部分の制動、それ故に上方への方向に従ったハウジングの加速度の減少の間、下方への方向に従った質量部分の速度の減少を通じて質量部分の減速が再び存在する。
【0045】
動力を自動的に引き出すことは、地面のような固定基準に機械的な接触なしにメカトロニクス装置を移動することを通じて生じる。これは、例えば、ハウジングが歩行者の腰につるされる場合にハウジング内の移動式の質量部分が地面に対して静止したままである傾向を有するような慣性を使用することを正当化する。ハウジングに対する質量部分の相対運動は、動力が十分に引き出される状態にアクチュエータが制御されることを可能にする。
【0046】
前記に示したように、回収される動力は、ハウジングの加速度に直接関係する速度をアクチュエータの軸に与える間に最大にされる。サーボ制御システムのおかげで、これら2つの大きさは、同相に保持される。生じる不快感の最小化及び/又は回収される動力の最大化及び/又は実施形態の簡単さなどの狙いとされる目的に従って、サーボ制御システムによって質量部分の速度に与えられる変化は、前の実施例のように、実質的に正弦波、又は実質的に台形、あるいはハウジングの加速度と同一の種類のものであり得る。
【0047】
速度の振幅はハウジング内の質量部分の偏位2Yを調節するために決定される。力FAがアクチュエータの軸のレベルに限定される場合、力FBもまた、反応してハウジングの腰への留め具のレベルに限定される。ハウジングの速度が低い場合、そのとき留め具によってハウジングに伝達される機械動力は非常に減少させられる。換言すれば、ハウジングによって引き出される機械動力、従って引き出される電気動力を増加させるために、本発明は、電気動力を回収するために、加速し、その後にばねに掛かっている質量部分などのあらゆる手段なしに質量部分を制動することを考える。
【0048】
質量部分の大きい偏位2Yは、ハウジングの遅い運動からを含む、動力の回収を高める。歩行者によって運ばれる軽い質量部分は、ハウジングの大きさに適合される大きい偏位2Yを生じさせる強い加速度が質量部分に与えられるという条件で、かなりの動力が引き出されることに適合する。
【0049】
前述したように、ハウジング内の質量部分の垂直運動は正弦波以外であり得る。特にエネルギー評価を最適化するために、本発明は、アクチュエータ11−12がモータとして作動し、アクチュエータに供給される平均動力<PA>がハウジングの加速度d2x/dtと該加速度に連動させられる質量部分の速度dy/dtとの積に比例するときに質量部分13に非常に高い速度を与えるように、実質的に周期Tの時間T/4及び3T/2においてハウジングの加速度の最大値の利益を最も良くすることを考える。質量部分は次に、ハウジングの加速度が実質的に時間0及びT/2のあたりでより小さくなるときに、電気発生器として作動するアクチュエータによって減速させられる。
【0050】
図4は、周期Tより小さい継続期間ΔTの間の実質的に台形の変化に従った周期Tの時間T/4及び3T/2のあたりで突然に増加する質量部分の速度dy/dtを備えた、そのような最適化を示す。その最適化は、補正器144を通じて常に質量部分の最大偏位に対応しハウジングの最大加速度に同期した同一振幅Y及び同一継続期間ΔTである移動式の質量部分の速度「パルス」を発生させる電流設定値を与えるサーボ制御システム14を通じて達せられる。さらに正確に言えば、アクチュエータ11−12は、2つの半周期に対応する作動サイクルの2つの段階を有する。アクチュエータは、ハウジングの加速度の絶対値の増加の間、最大まで上方への方向及び下方への方向に従った質量部分の運動速度を突然増加させるために、実質的に時間(T/4−ΔT/2)からT/4までの間及び(3T/4−ΔT/2)から3T/4までの間に継続期間ΔTの速度パルスのちょうど初めにモータとして突然作動する。ハウジング内の質量部分の速度はそのとき、速度(dy/dt)max=2Y/ΔTに達し得る。実質的に時間(T/4+ΔT/2)から(3T/4−ΔT/2)までの間において、アクチュエータは、ハウジングの加速度の絶対値の減少の間、ゼロへ上方への方向及び下方への方向に従った質量部分の運動速度を減少させるために発生器として突然作動する。速度パルスΔTの間、アクチュエータは作動せず、質量部分はy=0において静止して保持される。
【0051】
継続期間ΔTが周期Tより非常に小さいとすると、平均電力はそのとき、以下のようになる、すなわち、
P=<PA>=(2ΔT/T)m(d2x/dt2)max(dy/dt)max、すなわち、
P=(2ΔT/T)m(4π2f2X)(2Y/ΔT)、すなわち、
P=16π2mf3XY。
【0052】
例えば、質量部分が0.2kgの重さを有し、Y=4cmである偏位振幅で連動させられ、歩行者の腰において運ばれるアクチュエータが振幅X=6cm、周波数f=2Hzの振動を受けるとすると、移動式の質量部分の速度ピークを備えた最適化が図4に従って行われる場合、回収される動力はほぼP=0.605W程度である。
【0053】
そのような最適化なしでは、回収される動力は以下の通りである、すなわち、
<PA>=−m<(d2x/dt2)(dy/dt)>、すなわち、
P=−m4π2f2X2πfY(sin(−π/2))/2=4π3mf3XY、すなわち、
P=0.475W。
【0054】
その最適化は、単なる速度サーボ制御システムを備えた実施形態について4/πという係数を得ることができる。
【0055】
さらに概括的に言えば、質量部分の速度dy/dtは、時間T/4及び3T/2のあたりで非対称的に増加及び減少させることができる。
【0056】
代替形態を備えた前述したような本発明の第1の実施形態は、例えば移動式のセル方式の端末、有酸素運動タキメータ、又は動物によって運ばれるGPS位置確認装置などの小型電気アイテムに出力電圧VSを供給するために十分である。
【0057】
貯蔵装置16によって消費され得る電気動力を保存するために、加速度計142が所定期間ハウジングの運動を検出しないならばアクチュエータ11−12及びサーボ制御システム14に供給しないようにスイッチがその出力において配置され得る。別の代替形態によれば、クロックが、メカトロニクス装置1内に含まれ、速度センサ141が質量部分の運動を随意的に検出するように又は加速度計142がハウジングの運動を随意的に検出するように、メカトロニクス装置1を起こさせるために各所定期間の満了時に使用される。
【0058】
機械/電気変換及び電気貯蔵においてさらに多くの電気動力を保存するために、引き出される電気動力の減少に不利益であるが、図3を参照して実質的に時間0からT/4までの間と実質的に時間T/2から3T/4までの間に及ぶアクチュエータの作動サイクルの一部の間、サーボ制御システム14はモータとしてアクチュエータ11−12をもはや制御しない。前記サイクルのそれらの部分の間、質量部分12−13は自由に移動する。サーボ制御システム14は、実質的に時間T/4からT/2までの間と実質的に時間3T/4からTまでの間に及ぶアクチュエータの作動サイクルの別の一部の間、電気動力貯蔵装置16を充電するための発生器としてアクチュエータを制御するために作動するのみである。
【0059】
前記説明はまた、自然振動運動が別の方向、例えばボートにおける縦揺れ又は横揺れに従うと考えられる場合に有効である。そのとき質量部分は自然振動を受けるが、その重量の効果は水平にキャンセルすることができ、例えば静止時にバランスをとる必要を取り除くことができる。前記装置のアセンブリは振り子の種類であり得る。
【0060】
ここで図5及び図6を参照すると、本発明の第2の実施形態に係るメカトロニクス電気動力発生装置2は、本発明の第1の実施形態に係るハウジング10及び質量部分13の直線運動に代えて、回転運動で駆動され得るハウジング及び質量部分23を有する。質量部分23は、可逆的回転アクチュエータ21−22の固定電機子21に回転可能な回転誘導子22の軸棒221の一端に固定される慣性ホイールを有し得る。代替的には、前記慣性ホイールは、軸棒221の一端に固定される直径ロッド(diametrical rod)に固定される又は対称的に自由に滑動することができる、又はサーボ制御システム24を通じて連動させられるように直径ロッドに対称的に滑動することができる、あるいは、軸棒の端部に固定される別の頂点を有するとともにサーボ制御システム24を用いて連動させられる変形を有する変形可能な四辺形の2つの反対側の頂点の端部に配置される2つのカウンターウェイトによって取り換えられる。直径ロッドに移動可能なカウンターウェイトを備えた又は変形可能な四辺形を備えた代替形態は、質量部分の慣性モーメントがアクチュエータの作動サイクルの連動させられる段階に応じて調節されることを可能にする。プランジャーシステムはまた、回転軸に対する質量部分の慣性モーメントを調節するための非圧縮性流体を移動することができる。
【0061】
質量部分23の偏位2θYはここでは角度がつけられ、ハウジングの垂直方向の大きさによってもはや限定されない。
【0062】
図7は、線形アクチュエータより標準的な磁石同期回転機械の形をした、例えば4つの極を備えた可逆的回転電磁アクチュエータを含む本発明に係るメカトロニクス装置の第2の実施形態をさらに詳細に示す。
【0063】
メカトロニクス装置2は、アクチュエータ21−22を収容するハウジング20、アクチュエータの円筒形回転誘導子22によって本質的に構成される移動式の質量部分及び電気回路24−26を含む。回転誘導子の慣性が不十分である場合、質量部分は、図5に示す慣性ホイール23などの回転誘導子の軸棒221と一体化した小型ホイールによって完成され得る。図7では、ハウジング20は、例えば歩行者の腰の下に又は脚に固定される垂直の支えの形をして部分的に示される。ハウジング20は、軟鋼製円筒形バレル212の端部に固定される支柱211のまわりのボールベアリング201を通じて回転配置される。アクチュエータの円筒形固定電機子21は、円筒形バレル212の内部表面に固定され、該円筒形バレルの端部は、閉じられて2つのボールベアリング213を用いて回転誘導子22の軸棒221のまわりに回転可能に取り付けられる。円筒形バレル212の外部表面は、サーボ制御システム24、可逆的増幅アンジュレータ25及び小型電気動力貯蔵装置26を支持する。固定電機子21は、回転誘導子22の急速な回転運動に対して比較的遅い回転運動で駆動される。
【0064】
円筒形電機子21の一端は、ボールベアリング201によってハウジング20から回転可能に分離した支柱211を支持する。ボールベアリング213は、回転電機子22を回転可能に分離する。そのような分離は、固定電機子が遅い角度振動によって付勢されるのみであるので、回転誘導子の急速な回転のために起こり得る振動からハウジング20を分離することによって前記装置2を運ぶ歩行者の快適さを改善する。
【0065】
別の回転アクチュエータによれば、電機子と誘導子の相対位置は反対にすることができる。電機子が中心に位置して軸棒221に固定され、増幅アンジュレータ25にブラシをこすりつけることによって接続される。誘導子は、周囲に位置して円筒形バレル212の内部表面に固定される。
【0066】
図示されていない別の代替形態によれば、メカトロニクス装置の慣性の大部分を利用するために、慣性ホイールは、貯蔵装置26などの電気回路24−26の幾つかの比較的重い構成要素などのメカトロニクス装置の幾つかの構成要素の質量によって、及び/又は
移動式のセル方式の端末が貯蔵装置26によって出力電圧VSを供給される場合に移動式のセル方式の端末によって取り換えられる。そのような付加質量は、全体の慣性を利用するためにアクチュエータ21a−22a、21b−22bの軸棒221a、221bに固定される。
【0067】
第2の実施形態では、電気回路24−26の反対側の円筒形固定電機子21を支持する円筒形バレル212の端部において、連結アーム214は、歩行者によって発生させられる遅い振動運動で駆動され得るように固定され得る。固定電機子21の円筒形バレル212に固定された角速度測定センサは、軸棒221に対して直径方向に反対側に2つの小型加速度計215を有する。加速度計215は、ハウジングが歩行者の脚から垂れ下げられる場合、地面に実質的に平行な加速度測定感受性方向に従って反対側の加速度を測定することができる。
【0068】
アクチュエータ21−22を制御するための図8に示す電子サーボ制御システム24は、第1の実施形態に係るサーボ制御システム14と同様である。電子サーボ制御システム24は、図2に示す第1の実施形態と同様に、誘導子21の角回転速度を測定する速度センサ241と、制御回路243−244−25の差動入力に接続される二重加速度計センサ242とを含む。固定電機子21の角加速度d2θx/dt2と回転誘導子22を本質的に有する質量部分の角速度dθy/dtとに関する関係に応じて、制御回路内の補正器244は、減算乗算器243から、一方では、測定された角加速度と特に角加速度及び角速度の振幅に依存する所定の係数との積と、他方では、角速度dθy/dtに比例する大きさとの間の差を補正し、得られる差をハウジングの角度位置θxに依存する設定値の値と比較する。比較の結果は、アクチュエータが電圧源として使用される電気動力貯蔵装置26を備えたモータとして又は貯蔵装置16を電気的に充電するための発生器として作動するようにアクチュエータに電流及び電圧を与えるために、電気動力貯蔵装置26に接続される増幅アンジュレータ25に入力電圧を適用するために使用される。
【0069】
例えば、メカトロニクス装置2は、歩行者の手首又は大腿部において運ばれ得る、又はボートに固定され得る。
【0070】
第1の実施形態の場合のように、貯蔵装置26によって消費され得る電気動力を保存するために、電気回路24−26の供給は、二重加速度計センサ242が所定期間ハウジングのあらゆる運動を検出しないならばアクチュエータ21−22及びサーボ制御システム24に供給しないようにスイッチによって手動で切断され得る。
【0071】
メカトロニクス装置2の作動原理は、第1の実施形態に係るメカトロニクス装置1の作動原理と本質的に同様であり、線形速度を角回転速度に対応させ、線形加速度を角回転加速度に対応させる。少なくともボールベアリング201によって与えられる固定電機子21に対するハウジング20の機械的な分離を用いて、固定電機子は、機械動力が回収される歩行者などの移動システムの自然運動によって駆動される。前記システムの運動は、歩行者の大腿骨頸のまわり、又は歩行者の手首のレベルにおいて、又は横揺れ及び/又は縦揺れを受けるボートにおける場合のような回転成分を有する。固定電機子21の自然振動によって回収される動力は、固定電機子の角加速度と直接関係する角速度を回転誘導子22によって構成される回転する質量部分に与えることによって最大にされる。しかしながら、第2の実施形態では、回転誘導子22の自己の角速度は、ハウジング20の大きさの制約によってもはや限定されず、最大動力が回収される固定誘導子21の小さい角速度に比べて大きくなり得る。
【0072】
図6では、三角方向(trigonometric direction)に従って方向づけられた矢印は、歩行者の体によって固定電機子に及ぼされるトルク抵抗CBを示す。反対側の三角方向に従って方向づけられた矢印は、アクチュエータの軸棒221に及ぼされる慣性ホイール23及び回転誘導子22の作用CAを示す。例えば地面に関連づけられた垂直線Vに対する固定電機子21の角度位置及び固定電機子の回転運動の角度振幅は、θx及びθXによって表される。固定電機子の半径Rに関連づけられた基準系に対する質量部分の角度位置及びハウジング内の質量部分の回転運動の振幅は、θy及びθYによって表される。ハウジング及びすべての構成要素を備えた装置2は全慣性モーメントJを有し、特に回転電機子22、軸棒221及び随意的に慣性ホイール23を有する全体の移動式の質量部分22−23は慣性モーメントjを有する。
【0073】
質量部分22−23が同時に回転している間に、ハウジングが回転運動を受ける場合、トルクCA及びCBが、以下の方程式によって与えられる、すなわち、
CA=jd2θx/dt2+jd2θy/dt2、
CB=(J−j)d2θx/dt2+CA=Jd2θx/dt2+jd2θy/dt2。
【0074】
軸棒221を用いてアクチュエータ21−22に供給される瞬時動力PAと歩行者の脚へのハウジングのためのフック位置において歩行者から引き出される瞬時動力PBとは、以下の「トルク×角速度」の形式の積によって表される、すなわち、
PA(t)=−CAdθy/dt、
PB(t)=CBdθx/dt。
このような動力は、ハウジング内の摩擦を除き、回転全てが周期的であるとし、同じ変数θx又はθyに依存するこれらの微分積全てが平均してゼロであることを与えると、同じ平均値Pを有する。そのとき前の動力の平均動力は、以下のようになる、すなわち、
P=<PA>=−j<(d2θx/dt2)(dθy/dt)>、
P=<PB>=j<(d2θy/dt2)(dθx/dt)>。
【0075】
第1の前の関係は、発生器として作動するアクチュエータに供給される機械動力が歩行者によって固定電機子に与えられる角加速度d2θx/dt2及び固定電機子に対する質量部分の角速度dθy/dtに依存することを表している。固定電機子に与えられる加速度d2θx/dt2が歩行者に依存することを知っているので、本発明は、固定電機子の加速度に質量部分の速度dθy/dtを連動させる。固定電機子の角加速度の小さい変化において、回転誘導子、従って質量部分の速度が大きくなればなるほど、回収される動力の量が大きくなる。固定電機子の角加速度における質量部分の角速度の調節は、図2に関連して記載したように、図8に示す電子サーボ制御システム24によって付与される。
【0076】
例えば、モータとして作動するアクチュエータ21−22が固定電機子内の質量部分22−23に時間の関数として実質的に正弦波の回転を与え、固定電機子が地面に対して実質的に正弦波の回転に従って交互に移動することが考えられる、すなわち、
θx=θXsin(2πft)、
θy=θYsin(2πft+φ)、
ここで、fは実質的に正弦波の運動の周波数、φは平均動力Pを最大にするために−π/2に等しいそれらの間の位相シフトである。P=<PA>において、これは、固定電機子に対する質量部分の角速度が固定電機子の角加速度に連動させられることをもたらし、それは、質量部分の角加速度をP=<PB>に従って固定電機子の角速度に連動させることを行うことをより容易にする。
【0077】
これらの仮説を用いて、センサ242から離れて十分に間隔をあけて配置される2つの加速度計215によって測定され得る固定電機子の角加速度、すなわち、
d2θx/dt2=−4π2f2θXsin(2πft)
に対する質量部分の角速度、すなわち、
dθy/dt=2πfθYcos(2πft−π/2)=2πfθYsin(2πft)
の依存関係は、以下の通りである、すなわち、
dθy/dt=−(θY/2πfθX)(d2θx/dt2)。
パラメータf及びθxは、測定された固定電機子の加速度d2θx/dt2から導き出され得る。質量部分の振幅θYは、ハウジングの大きさによってもはや限定されない。
【0078】
そのとき平均動力は、以下のようになる、すなわち、
P=<PA>=−j<(d2θx/dt2)(dθy/dt)>=<PB>、すなわち、
P=−j(−4π2f2θX)(2πfθY)/2=4π3jf3θXθY
【0079】
図3はまた、固定電機子及び質量部分の回転が周期T=1/fで時間とともに実質的に正弦波であるとされる場合、時間tの関数としての角度位置θx及びθy、並びにそれらの速度及び加速度の漸進的変化を示す。垂直線Vに対する固定電機子の角度位置θxは、歩行者の運動によって与えられる。固定電機子の速度dθx/dt及び加速度d2θx/dt2もまた、歩行者によって与えられる、すなわち、
dθx/dt=2πfθXcos(2πft)、
d2θx/dt2=−4π2f2θXsin(2πft)。
【0080】
固定誘導子に対する質量部分の角速度、すなわち、
dθy/dt=2πfθYcos(2πft+φ)=2πfθYsin(2πft)
は、以下の関係、すなわち、
dθy/dt=−(θY/2πfθX)(d2θx/dt2)
に従って固定電機子の角加速度に連動制御させられる。ハウジング内の質量部分の角度位置θy及びその加速度d2θy/dt2はそこから生じる。時間0及びT/2において、固定誘導子の角速度dθx/dtは低いけれども最大であり、質量部分の角加速度d2θy/dt2は固定誘導子の速度と同じ徴候を備えてそのとき最大となり、従って、装置2は、高いトルクCBを利用することができ、これは、脚のレベルにおいてかなりの動力PBである。引き出される動力は、アクチュエータの軸棒221に瞬時に伝達されず、引き出される動力の一部は最初に運動動力に変換される。
【0081】
例えば、図3によれば、半周期T/2の間、アクチュエータ21−22は、固定誘導子の角加速度が反対側の三角方向に従って増加する間、半径Rまで実質的に増加する角速度で三角方向に従って質量部分22−23を回転するために、実質的に時間0からT/4までの間においてモータとして作動し、アクチュエータによって消費される電気動力は、質量部分の加速度を減少させるために運動動力に変換される。次に、実質的に時間T/4からT/2までの間において、アクチュエータは、固定電機子の角加速度が反対側の三角方向に従って減少する間、三角方向に従った角速度が減少する質量部分を減速させることによって運動動力を回収するために電気発生器として作動する。次の半周期の間、実質的に時間T/2からTまでの間、質量部分は、反対側の三角方向に従って回転し、三角方向に従った角加速度の増加の間、モータとして作動するアクチュエータによる質量部分の角速度の増加が再び存在し、次に三角方向に従った固定誘導子の角加速度の減少の間、アクチュエータによる減速を通じて質量部分の角速度の減少が存在する。
【0082】
従って、各歩行者の歩みの間、アクチュエータ21−22は、両方の回転方向に作動する、すなわち、一方でアクチュエータはその運動を加速し、従って電気動力を消費し、他方で電気動力を回収し、従って運動を減速させる。アクチュエータの運動は、歩行者が抵抗を感じるように歩行者の運動に同期され、幾つかの機械動力の徴候が歩行者の運動から回収され、アクチュエータによって変換され、電気回路を用いて電気動力貯蔵装置26に伝達される。そのような動力は、質量部分22−23が動力を一時的に貯蔵するので貯蔵装置に瞬時に伝達されない。運動及びその分解(resolution)を前述した方程式に変換することは、電気動力又はアクチュエータのレベルにある機械動力が平均値より絶対値において非常に高くなり得る2つの極値の間で振動することを示し、平均値は、貯蔵装置が再充電されることを確保する。
【0083】
定性的に、歩行者が十分な動力を得るためにかなりの尽力を感じることが要求されるので、アクチュエータ21−22は、歩行者の運動が比較的長く、腰のレベルにおいて脚の回転が遅い角速度を有するとき質量部分22−23を突然に加速及び減速する。
【0084】
既に指摘したように、回収される動力はすべて、質量部分の角速度が大きく、従って角速度の変化が小さいときより大きい。本発明に係るアクチュエータの作動の代替形態はそのとき、固定誘導子の最大角速度より実質的に非常に大きい、大きい公称角速度で質量部分22−23を回転駆動させることと、この公称角速度のあたりの質量部分の角速度dθy/dtを変更することとを有する。この代替形態は、例えば貯蔵装置26の平均電圧より大きい、大きい平均電圧で電気回路24−26を作動し、質量部分及び歩行者の間の大きい慣性連結を永久に有するという利点を有する。
【0085】
代替的に、サーボ制御システムは、質量部分の最大角速度が、ただ1つの歩みに代えて幾つかの歩行者の歩みにおいて達せられるようであり得る。
【0086】
ハウジング20内の質量部分22−23の運動は、正弦波以外であり得る。特にエネルギー評価を最適化するために、本発明は、アクチュエータがモータとして作動し、アクチュエータ21−22に供給される平均動力<PA>が、固定電機子の加速度d2θx/dt2と該加速度に連動させられる質量部分の速度dθy/dtの積に比例するときに、非常に高い速度を質量部分に突然に与えるように、実質的に周期Tの時間T/4及び3T/2において固定電機子の加速度の最大値の利益を最も良くすることを考える。質量部分は次に、固定電機子の加速度が絶対値において減少するときに電気発生器として作動するアクチュエータによって減速させられる。
【0087】
しかしながら、第2の実施形態では、ハウジング内の運動における質量部分の偏位に関する制約がもはや存在しない。その結果、時間間隔ΔTはもはやこのように限定されず、固定誘導子の最も低い加速度の利益をとるために半周期T/2に随意的に達することができる。
【0088】
図4はまた、周期Tより短い継続期間ΔTにおいて対称的な増加及び減少を有する実質的に台形の変化に従った周期Tの時間T/4及び3T/2のあたりで突然に増加する質量部分の角速度dθy/dtを備えた最適化の実施例を示す。その最適化は、補正器244を通じて常に質量部分の最大偏位に対応しハウジングの最大加速度に同期した同一振幅Y及び同一継続期間ΔTである移動式の質量部分の速度「パルス」を発生させる電流設定値を与えるサーボ制御システム24を用いて達せられる。
【0089】
継続期間ΔTが半周期T/2に実質的に等しいとすると、平均電力はそのとき、以下のようになる、すなわち、
P=<PA>=(2/π)j(d2θx/dt2)max(dθy/dt)max、すなわち、
P=(2/π)j(4π2f2θX)(dθy/dt)max、すなわち、
P=8πjf2θX(dθy/dt)max。
【0090】
例えば、第1の実施形態の実施例のように、m=0.2kgの同じ質量部分であるが、
半径r=4cmのリングなどの多少小型の中空円筒形バレルの形をし、質量部分の慣性モーメントがj=mr2=0.00032kgm2、最大角速度(dθy/dt)maxが10,000rpm、すなわち1047rd/sを有し、歩行者の腰において運ばれるアクチュエータ21−22が振幅θX=0.35rd及び周波数f=1Hzの振動を受けると、質量部分の速度が正弦波形状の固定電機子の加速度に連動させられる場合、回収され得る最大動力は3Wである。
【0091】
移動式の質量部分の速度ピークを備えたそのような最適化なしでは、技術的理由のために、質量部分22−23の振幅θYがハウジング20の大きさによってもはや限定されないとき、移動式の質量部分の角回転速度を最大値(dθy/dt)maxに限定することが好ましい。従って、振幅θYは、最大速度、すなわちθY=(1/2πf)(dθy/dt)maxに依存する。そのとき回収される動力は、以下のようになる、すなわち、
P=4π3jf3θXθY=4π3jf3θX((dθy/dt)max/2πf)、
P=2π2jf2θX(dθy/dt)max、すなわち、
P=2.3W。
【0092】
その最適化は、単なる速度サーボ制御を備えた実施形態について4/πという係数を得ることができる。
【0093】
代替的には、質量部分の角速度の変化が時間T/4及び3T/2のあたりで非対称である。
【0094】
また別の代替形態によれば、サーボ制御システムは、回転アクチュエータの作動サイクルが、特に質量部分の最大角速度に達するための多数の歩みが質量部分の最小角速度に達するための多数の歩みとは異なる非対称な方法で、幾つかの歩行者の歩みに及んでいるようであり得る。
【0095】
別の実施例によれば、質量mを有する質量部分23は、半径rを有する回転ディスクの形をしている。慣性モーメントj=mr2/2及び角速度(dθy/dt)を備えた回転電機子の全運動動力は、以下のとおりである、すなわち
E=j(dθy/dt)2/2。
【0096】
角速度の変化は、動力を引き出すために固定電機子の遅い駆動運動との相互作用を通じた動力の変化及び貯蔵装置26に動力を戻すための反対側の変化を引き起こす、すなわち、
P=dE/dt=j(dθy/dt)(d2θy/dt2)。
従って、小さい角速度変化において、回収される動力はすべて質量部分の角速度が高いときにより高くなる。
【0097】
回転ディスクの2つの角速度の間の動力変化は、2つの動力状態の間の経路から独立した2つの動力状態の間において、
ΔE=j((dθy/dt)12−(dθy/dt)22)/2
によって規定される。
【0098】
そのとき本発明に係るアクチュエータの作動の代替形態は、大きい公称角速度において質量部分22−23を回転駆動させることと、そのような公称角速度のあたりで質量部分の角速度dθy/dtを変更することとを有する。そのような代替形態は、貯蔵装置26の平均電圧より高い、高い平均電圧で電気回路24−26を作動することと、例えば、質量部分とアクチュエータとの間の大きい慣性連結を永久に有することという利点を有する。
【0099】
例えば、回転ディスクの角速度が(dθy/dt)1=8000rpmから(dθy/dt)2=6000rpmまでの間で変化するとき、質量m=0.05kg及び半径r=0.03mを有する回転ディスクによって得られる慣性は、ΔE=3.3Jである。脚の加速/減速の継続期間が約1秒で、損失を除く平均機械動力E/Tはそのとき、P=3.5Wである。
【0100】
引き出される動力の限界はまた、使用者である歩行者の快適さに依存する。その反力は、脚においてあまり大きくなく且つ規則的でない必要があり、また克服される重要なジャイロ力があまりない必要がある。実際的には、本発明に係る2つのメカトロニクス装置は、体の両側に対称に配置される。そのとき回収される動力は、移動式のセル方式の端末の少なくとも一部を再充電するのに十分であるワットのオーダーである。
【0101】
その最適化に反して、電気動力貯蔵装置26による電気動力の消費を回避するために、またサーボ制御システムを簡単にするために、サーボ制御システム24は、図3に関して実質的に時間0からT/4までの間及び実質的に時間T/2から3T/4までの間に及ぶアクチュエータの作動サイクルの一部の間、モータとしてアクチュエータ21−22をもはや制御しない。前記サイクルのそれらの部分の間、質量部分22−23は自由に移動する。サーボ制御システム24は、実質的に時間T/4からT/2までの間及び実質的に時間3T/4からTまでの間に及ぶアクチュエータの作動サイクルの別の一部の間、電気動力貯蔵装置26に取り込むための発生器としてアクチュエータを制御するために作動するのみである。
【0102】
本発明の第1及び第2の実施形態の代替形態によれば、特にアクチュエータがモータとして作動するとき、質量部分を加速するために、アクチュエータを補助するためのばねなどの弾性手段がハウジングと質量部分との間に導入される。
【0103】
第1の実施形態のための図9に示すように、圧縮螺旋ばね17は、ハウジング10の底面101及び質量部分13に連結される端部を有する。質量部分13は、例えばハウジング101の底面に深く下(y<0)にある場合、質量部分は、図3において0からT/4までの四分の一の周期に示されるように、上部まで多かれ少なかれ完全に加速されることとなる。質量部分が下向きであるときに圧縮されるばね17は、質量部分が減速させられる前に最大速度に達するまで重力に逆らって質量部分を上向きに押すために弱められる。代替的に、別の圧縮螺旋ばねは、ハウジング10の上部及び質量部分に連結される端部を有する。
【0104】
第2の実施形態において、弾性手段は、図10に示すように、周囲の端部271がハウジング20に固定され、中心の端部272が回転誘導子22の軸棒221のまわりに固定される螺旋ばね27からなる。回転誘導子が両方向に非常に多くの回転を行うと考えられる場合、ばねとアクチュエータとの間に非増加(demultiplication)が導入される。最後の螺旋に半径方向のカーソルを備えた剛性調節手段273は、ばね27の剛性を歩行者に応じて多かれ少なかれ調節することができる。
【0105】
ばねは、固定電機子に与えられる運動の周波数が質量部分及びばねアセンブリの自己の振動周波数からあまり外れないという条件の下に、アクチュエータの重量及び容積を大幅に低減する。幾つかの適用において、ばねの剛性を調節するためのカーソル273などの手段は、できる限りそれらの周波数を適合させるために使用される。
【0106】
代替形態によれば、螺旋ばねは、軸棒221のまわりに反対側にねじれて配置される螺旋ばねによって完成される、又は軸棒221の一端のまわりに配置される反対側の軸ねじりを有する1つの圧縮螺旋ばねあるいは2つの圧縮螺旋ばねによって取り換えられる。
【0107】
サーボ制御システムはまた、1つ又は2つのばねなどの弾性手段の剛性に関連し得る。
【0108】
実施例として、以下の大きさにおいて、すなわち、回転誘導子の巻線の銅の抵抗率がρ=1.8×10−8Ωm、回転誘導子の平均半径が4cm、アクチュエータの磁気誘導が1.5T、f=1Hzあたりの固定電機子の角運動において回収される電気動力が2.3W、銅の損失が約0.23W、0.9Hzから1.1Hzの範囲においてばねなしの駆動トルク2.3mNに代えてばねを用いた駆動トルクが0.44mNにおいて、2.1cm3及び約20gの銅が、ばねのない実施形態のための57.5cm3及び550gの銅に代えて、ばねを用いた実施形態のために得られる。回収される等しい動力において、ばねを備えた実施形態は、はるかに経済的で、さらに小型化することができる。
【技術分野】
【0001】
本発明は、反対方向における加速度を有するシステムの自然振動運動からの動力の回収に基づいて電気動力を発生させる方法及び装置に関する。自然振動運動システムは、例えば歩行者が運ぶ歩行者の腰に掛けられた前記装置のハウジングである。
【背景技術】
【0002】
2005年10月2日〜6日に香港で開催されたIEEEの産業応用部門(IAS)の年次会合のCDROM議事録のエム・ルエラン(M.Ruellan)、エス・ツリ(S.Turri)、ハミド・ベン・アハメド(Hamid Ben Ahmed)及びビ・ムルトン(B.Multon)による論文「電磁共鳴発生器」は、永久磁石誘導子が箱に固定され、電機子がばねを減衰させることにより箱に連結された移動式の質量部分に固定される管状構造を有する同期電磁気線形アクチュエータを有する電気動力発生器システムを開示する。電機子は、電気動力貯蔵手段に電気的に接続される。装置の箱は、歩行者の臀部のレベルにおいて運ばれ、該歩行者の運動は実質的に正弦波と考えられる。アクチュエータは、移動式の質量部分に対して受動的であり、再充電のための電気発生器、例えばセル方式の電話のバッテリーなどの例えば電気動力貯蔵手段として作動するのみである。回収される動力は、歩行者の歩みの頻度とともに増加する。
【発明の概要】
【発明が解決しようとする課題】
【0003】
人体の自然移動などの自然移動において、その振動は低周波である。そのような状態において、前述した論文に従って前記発生器システムによって回収される動力は、非常に低い。従って、歩行者によって臀部において運ばれるそのような電磁気発生器システムを用いて回収される平均動力は、移動式の質量部分が50gで一秒当たり2歩のペースにおいて40mWより低い。
【0004】
本発明は、電気動力貯蔵手段に電気的に接続され、振動速度運動を受けることができる第1部材及び該第1部材に対して速度について振動することができる質量部分の少なくとも一部を構成する第2部材を有するアクチュエータを用いて電気動力を発生させる方法を用いて前述した欠点を克服する。
【課題を解決するための手段】
【0005】
そのような方法は、アクチュエータの作動サイクルの一部の間、貯蔵手段を充電する発生器としてアクチュエータを制御するために、第1部材の振動運動に対する質量部分の運動をサーボ制御することを有し、質量部分は、アクチュエータの作動サイクルの別の一部の間、自由に移動する。
【0006】
第1部材及び第2部材は、例えば、磁石同期回転機械の種類のアクチュエータの周囲の電機子及び中心の誘導子である。大型機械においては、磁石は、電磁石によって取り換えられ得る。
【0007】
本発明に係るアクチュエータは、例えば携帯用アイテムのバッテリーを再充電するための電気動力を発生させるために設けられ、該アクチュエータは次に、携帯用アイテムのバッテリーに接続される電気動力貯蔵手段を充電するための発生器として作動する。質量部分は次に、アクチュエータの作動サイクルの別の一部の間、自由に移動することができる。
【0008】
本発明はまた、電気動力貯蔵手段(16、26)に電気的に接続され、振動速度運動を受けることができる第1部材(11、21)及び該第1部材に対して速度について振動することができる質量部分(13、23)の少なくとも一部を構成する第2部材(12、22)を有するアクチュエータ(11−12、21−22)を用いて電気動力を発生させる方法に関する。
【0009】
そのような方法は、アクチュエータの作動サイクルの一部の間、貯蔵手段を充電する発生器としてアクチュエータを制御するために、第1部材の振動運動に対する質量部分の運動をサーボ制御することと、アクチュエータ(11−12、21−22)の作動サイクルの別の一部の間、貯蔵手段によって供給されるモータとしてアクチュエータを制御するために、第1部材の振動運動に対する質量部分の運動をサーボ制御することとを有する点において特有である。
【0010】
歩行者が運ぶ質量部分を備えたアクチュエータなどの自然振動運動システムからできるだけ多くの電気動力を回収するために、アクチュエータの作動は、アクチュエータの作動サイクルの別の一部が貯蔵手段によって供給されるモータとしてアクチュエータを制御するために第1部材の振動運動に対する質量部分の運動のサーボ制御を含み得るように可逆的である。そのような場合、アクチュエータは、自然振動システムの振動運動を受ける第1部材の振動運動へのサーボ制御の後に、質量部分を加速させるためにモータとして、あるいは質量部分の運動動力を回収するために発生器として作動する。そのようなサーボ制御は、従来技術による受動的アクチュエータを用いたものより、より多くの動力が回収されることを可能にする。
【0011】
特に、サーボ制御システムは、質量部分の運動速度が第1部材の加速度に連動(slave)させられることを必要とすることが生じ得る。
【0012】
そのようなサーボ制御によって、本発明の方法は、移動システムからできるだけ多くの動力を引き出すのに役立つと同時に、アクチュエータによって発生させられ得る重量、振動及び騒音のための不快感が歩行者にほとんどないことを確保する。質量部分の偏位(deflection)が大きいほど及び/又は質量部分が受ける加速度が強いほど、自然振動システムの振動運動が一層遅くなるときに回収される動力が高くなる。
【0013】
前記方法は、例えばセル方式の移動式の端末を供給する小型蓄電池などの電気動力貯蔵手段を再充電するための移動式の質量の人工運動をより迅速に実行することを通じて、本来小さい運動を有するシステムにおいて動力を引き出すのに役立つ。この目的のために、アクチュエータの作動サイクルは、所定の方向と反対側の方向に従った第1部材の加速度の増加の間、所定の方向に従った質量部分の運動速度を増加させるためのモータとしてのアクチュエータの作動段階と、反対側の方向に従った第1部材の加速度の減少の間、所定の方向に従った質量部分の運動速度を減少させるための発生器としてのアクチュエータの作動段階と、所定の方向に従った第1部材の加速度の増加の間、反対側の方向に従った質量部分の運動速度を増加させるためのモータとしてのアクチュエータの作動段階と、所定の方向に従った第1部材の加速度の減少の間、反対側の方向に従った質量部分の運動速度を減少させるための発生器としてのアクチュエータの作動段階とを有し得る。
【0014】
時間に応じて質量部分の速度のために与えられる変化は、例えば実質的に正弦波、台形、又はハウジングの加速度と同じ種類であり得る。
【0015】
電気動力貯蔵手段による動力の回収をより良く最適化するために、その方向がどんな方向であっても質量部分の運動速度は、誘導子の加速度の最大絶対値と同期して保持され得る。他の部分において記載されるように、アクチュエータの作動サイクルは、第1部材の加速度が最大値のあたりで変化するときに質量部分の運動速度を増加及び減少させるためのモータとしてのアクチュエータのための作動段階を有し得る。
【0016】
本発明の目的はまた、電気動力貯蔵手段に電気的に接続され、振動速度運動を受けることができる第1部材及び該第1部材に対して速度について振動することができる質量部分の少なくとも一部を構成する第2部材を有するアクチュエータを含む電気動力発生装置を提供することである。前記装置は、アクチュエータの作動サイクルの一部の間、質量部分の運動を第1部材の振動運動に連動させることによって、貯蔵手段を充電する発生器としてアクチュエータを制御するためのサーボ制御手段を有することを特徴とする。
【0017】
サーボ制御手段はまた、アクチュエータの作動サイクルの別の一部において、貯蔵手段によって供給されるモータとしてアクチュエータを制御することができる。より少ない電気動力を発生させることができるより経済的な代替形態によれば、アクチュエータが供給されず、質量部分は、アクチュエータの作動サイクルの別の一部の間、自由に移動することができる。
【0018】
さらに具体的に言えば、サーボ制御手段は、第1部材の加速度を測定するための手段と、質量部分の運動速度を測定するための手段と、質量部分の運動速度を第1部材の加速度に連動させるためにアクチュエータを制御する手段とを有し得る。前記連動させられる手段は、測定された第1部材の加速度と第1部材の位置に応じて可変する設定点に対して測定された質量部分の運動速度とに応じてパラメータを補正するための手段と、アクチュエータから回収される、又はアクチュエータに供給される電気動力の変化を、補正されたパラメータに従って貯蔵手段の端子における電流及び電圧に向かわせるように適合させるための可逆的増幅アンジュレータ(amplifier-undulator)とを有し得る。
【0019】
質量部分の運動とアクチュエータの種類との種々の組合せは、本発明の装置を実現するのに役立ち得る。第1の実施形態によれば、質量部分の運動は線形である一方、アクチュエータの運動は線形又は回転である。動力が引き出される自然振動は垂直であり得る又は別の方向に従って方向づけられ得る。
【0020】
第2の実施形態によれば、質量部分の運動は回転であり、アクチュエータは回転する。そのような第2の実施形態では、サーボ制御手段は、より多くの動力を引き出すために、第1部材の最大角速度より大きい公称速度のあたりに質量速度の運動速度を変更することが可能であり得る。この第2の実施形態では、歩行者の快適さを改善するために、アクチュエータの第1部材は、自然振動運動システムに固定され、例えば少なくとも1つのボールベアリングなどの分離手段によって第1部材から回転可能に分離されるハウジングによって支持され得る。
【0021】
アクチュエータが自然振動運動システムから動力を引き出すように、また装置の小型化を増進するようにより良く役立つために、装置は、アクチュエータがモータとして作動するときに質量部分を加速させるようにアクチュエータを補助するための、アクチュエータを支持するハウジングに固定される弾性手段を有し得る。質量部分と弾性手段のサーボ制御はそのとき、質量部分の運動速度に関連するだけでなく、弾性手段の剛性、及び/又は、例えばアクチュエータの軸に正反対(diametrical)であるロッド上において移動可能であるカウンターウェイトの運動にも関連し得る。
【0022】
移動する質量部分の慣性モーメントを調節することはまた、回転軸について液体を移動させることを通じて起こることができるのに対し、弾性手段は、圧縮性流体の圧力に作用して調節される剛性を有する圧縮性流体を通じてそれ自体具体化することができる。
【0023】
本発明の他の特徴及び利点は、対応する添付図面を参照して非制限的な実施例として付与される本発明の幾つかの実施形態についての以下の記載を読むことからより明確に明らかとなるであろう。
【図面の簡単な説明】
【0024】
【図1】本発明の第1の実施形態に係る電気動力発生装置の概略軸方向断面図である。
【図2】第1の実施形態の代替形態に係る回転アクチュエータの誘導子のための回転速度サーボ制御システムのブロック図である。
【図3】時間に応じた電気動力発生装置のハウジング及び質量部分の正弦波運動位置、並びにそれらの速度及び加速度に関する6つのグラフを示す図である。
【図4】ハウジングの正弦波加速度に連動させられる本発明に係る前記質量部分の速度の最適変化を示す図である。
【図5】本発明の第2の実施形態に係る電気動力発生装置の回転アクチュエータの斜視図である。
【図6】本発明の第2の実施形態に係る電気動力発生装置の回転アクチュエータの正面概略図である。
【図7】第2の実施形態に係る電気動力発生装置の軸方向断面図である。
【図8】第2の実施形態に係る回転アクチュエータの誘導子の回転速度サーボ制御システムのブロック図である。
【図9】図1と類似しているが、第1の実施形態の代替形態に係る圧縮ばねを備えた図である。
【図10】別の第2の実施形態のための螺旋ばねを示す図である。
【発明を実施するための形態】
【0025】
図1及び図2を参照すると、本発明の第1の実施形態に係るメカトロニクス電気動力発生装置1は、電磁気アクチュエータ11−12、移動式の質量部分13及び電気回路14−16を囲むハウジング10を含む。電気回路の主要構成要素は、アクチュエータを制御する電子サーボ制御システム14、可逆的増幅アンジュレータ15、及び蓄電池又は超コンデンサなどの小型電気動力貯蔵装置16である。
【0026】
アクチュエータ11−12は可逆的である。サーボ制御システム14の制御の下で、アクチュエータは、電気動力を、移動式の質量部分13を付勢する機械動力に変換するための電圧源としての電気動力貯蔵装置16によって供給されるときに電気モータとして、又は、移動式の質量部分の運動から生じる機械動力を、出力電圧VSを供給することができる貯蔵装置に貯蔵される電気動力に変換するための電気発生器として作動する。
【0027】
図1に示す実施形態によれば、アクチュエータは同期線形であり、2つの主要部材、すなわちハウジング10の内部に固定されるコイルを備えた円筒形電機子11と、電機子11内において垂直軸方向移動に滑動することができる永久磁石を備えた円筒形誘導子12とを有する。誘導子12は、下端部の近くに軸棒121を通じて移動式の質量部分13を支持する。
【0028】
線形アクチュエータの代替形態によれば、電機子と誘導子の相対位置は反対にすることができる。電機子が中心に位置して軸棒121に固定され、増幅アンジュレータ15にブラシをこすりつけることによって接続される。誘導子は、周囲に位置して電機子を囲む。
【0029】
図2に示す代替形態によれば、アクチュエータは、永久磁石を備えた円筒形固定電機子11aと、電機子11aに回転可能に取り付けられるコイル円筒形回転誘導子12aと、を含む直流回転機械である。アクチュエータ11a−12aの実施例は、図7及び図8を参照してさらに詳細に記載される。この代替形態の質量部分13aは、該質量部分に固定される下端部を有するとともに軸棒121aの端部に固定される歯車122aに噛み合うラック131aを用いて、誘導子12aの軸棒121aに垂直に移動可能である。
【0030】
ハウジング10は、移動システムによって運ばれ、該移動システムから2つの反対の方向に従った加速を受ける。後に記載される実施例によれば、移動システムは、ハウジングを腰に固定して運ぶ歩行者である。ハウジング10は次に、歩行者の歩みによって発生させられ2つの反対方向に従った加速によって特徴づけられる実質的に垂直な平面における振動運動を受ける。別の実施例によれば、移動システムは、うねりの影響下で横揺れ及び/又は縦揺れから生じる振動運動を受けるボートである。
【0031】
図1に示す質量部分13は、例えばバッテリーが電気動力貯蔵装置16自体の少なくとも一部である移動式のセル方式の端末又はウォークマンの全部又は一部、あるいはキーホルダ又は財布などの何か他の物である。質量部分は、クリップ又はフックと環状に編まれたテープ、あるいは磁石と鉄の種類の軸棒121上の留め具を通じてアクチュエータから取り外され得る。
【0032】
図1に示す実施形態の代替形態によれば、質量部分がメカトロニクス装置の少なくとも非常に重い構成要素によって構成され、ハウジングは逆さまにされ、ハウジング10、アクチュエータ11−12及び電気回路14−16を有するアセンブリは、アクチュエータの軸棒121によって歩行者の腰から掛けられる。そのとき更なる質量は無用である。そのような代替形態では、加速度計は、アクチュエータの軸棒に固定される。軸棒に対するアクチュエータの速度は、以下にさらに記載されるように測定される。移動式のセル方式の端末又は何か他の物がまた、前述したようにそれをより重くさせるためにハウジングからつるされ得る。
【0033】
図1では、上方への逆向きの矢印は、ハウジング10に腰によって及ぼされる保持力FBを示す。下向きに方向づけられた矢印は、アクチュエータの軸棒121に及ぼされる質量部分の作用FAを示す。地面Sに関連づけられ地面からの高さHに原点を有する座標系に対するハウジング10の位置及びハウジングの運動振幅は、x及びXによって表される。ハウジングに関連づけられた座標系に対する質量部分13の位置及びハウジング内の質量部分の運動振幅は、y及びYによって表される。すべての構成要素を備えたハウジングは質量Mを有し、移動式の質量部分は質量mを有する。
【0034】
本発明によれば、アクチュエータ11−12は、従来技術の受動的発生器を備えたものより、より多くの動力を自動的に引き出すために連動させられる。アクチュエータが、電気発生器として作動する場合、例えば、ハウジング10は、上向きに加速されて座標xは増加し、質量部分13は、慣性の結果として静止したままである傾向を有して座標yは減少する。そのとき発生器は、装置16に貯蔵され得る電気動力を供給する。
【0035】
力FA及びFBは、以下の方程式によって与えられる、すなわち、
FA=mg+(md2x/dt2+md2y/dt2)、
FB=Mg+(M−m)d2x/dt2+(md2x/dt2+md2y/dt2)、
gは、重力加速度である。
【0036】
軸棒121を用いてアクチュエータに供給される瞬時動力PAとハウジングが歩行者の腰に固定される位置において歩行者から引き出される瞬時動力PBとは、以下の「力×速度」の積の形式によって表される、すなわち、
PA(t)=−FAdy/dt、
PB(t)=FBdx/dt。
このような動力は、ハウジング内のあらゆる摩擦を除き、運動全てが周期的であるとし、同じ変数x又はyに依存するこれらの微分積全てが平均してゼロであることを要求すると、同じ平均値Pを有する。そのとき前の動力の平均動力は以下のようになる、すなわち、
P=<PA>=−m<(d2x/dt2)(dy/dt)>、
P=<PB>=m<(d2y/dt2)(dx/dt)>。
【0037】
第1の前の方程式は、発生器として作動するアクチュエータに供給される機械動力が歩行者によってハウジングに与えられる垂直加速度d2x/dt2及びハウジングに対する質量部分の垂直速度dy/dtに依存することを表している。ハウジングに与えられる加速度d2x/dt2が歩行者に依存することを知っているので、本発明は、ハウジングの加速度に質量部分の速度dy/dtを連動させる。質量部分の速度を調節するために、電子サーボ制御システム14は、図2に示すように、速度センサ141、加速度計142、減算乗算器143、補正器144及び可逆的増幅アンジュレータ15を有する。速度センサ141は、誘導子12aの回転速度、すなわち質量部分13a又は13に一体化された誘導子12の移動速度を測定し、それによって質量部分の垂直速度dy/dtに比例する大きさを検知する。例えば、速度センサは、誘導子の巻線において誘導される電圧又はホール効果を通じてあるいは電気光学セルによってアクチュエータを横切る電圧の関数として誘導子の運動速度を検知する。加速度計142は、ハウジング10に固定されてハウジングの実質的に垂直の加速度d2x/dt2を測定する。
【0038】
本発明に係るハウジングの加速度と質量部分の速度の関係によれば、減算乗算器143は、測定されたハウジングの加速度と測定された質量部分の運動速度に応じたパラメータを付与する。減算乗算器は、測定された加速度に、特に加速度と速度の振幅に依存する所定の係数を掛け合わせることによってこのパラメータを得て、測定された垂直速度dy/dtに比例する大きさにおいてその得られた積を減ずる。補正器144は、ハウジングの位置に応じた設定値の値に対して減算乗算器によって供給される差を補正し、補正される差に応じて入力電圧を増幅アンジュレータ15に適用する。補正される差に応じた入力電圧によれば、増幅アンジュレータは、アクチュエータから回収されるあるいはアクチュエータに供給される電気動力の変化を、貯蔵装置16を横切る電流及び電圧に向かうように(direct)適合させるために可逆的である。増幅アンジュレータは、アクチュエータが、電圧源として使用される電気貯蔵装置16を備えた電気モータとして、あるいは貯蔵装置16を充電する電気動力のための電気発生器として作動するように、動力貯蔵装置16及びアクチュエータに電流及び電圧を与えるためにアクチュエータ11−12に接続される。
【0039】
静止時に、質量部分13a又は13は、ハウジングの底面に下ろされ、加速度計がハウジングの運動を検知するときにラック131a又は軸棒121の半ストロークにおいて再び上げられるのみである。代替的に、質量部分は、ハウジングの下部とラック131a又は軸棒121との間に固定された圧縮ばねによって又はハウジングの上部とラック131a又は軸棒121との間に固定された引力ばねによって永久にバランスがとられる。
【0040】
例えば、モータとして作動するアクチュエータがハウジング内の質量部分に実質的に正弦波の運動を与え、ハウジングが地面Sに対して実質的に正弦波のように垂直に移動することが考えられる、すなわち、
x=Xsin(2πft)、
y=Ysin(2πft+φ)、
ここで、fは実質的に正弦波の運動の周波数、φは平均動力を最大にするために−π/2に等しいそれらの間の位相シフトである。P=<PA>において、これは、ハウジングに対する質量部分の速度が地面に対するハウジングの加速度に連動させられることをもたらす。これは、P=<PB>に従って、ハウジングに対する質量部分の加速度を地面に対するハウジングの速度に連動させることを行うことをより容易にする。
【0041】
そのような仮説において、ハウジングの加速度に対する質量部分の速度の依存関係は、以下の通りである、すなわち、
dy/dt=−(Y/2πfX)(d2x/dt2)。
パラメータf及びXは、測定されたハウジングの加速度d2x/dt2から導き出され得る。質量部分の偏位2Yは、偏位が大きくなればなるほど回収される動力が大きくなることを考えるとはいえ限定される。
【0042】
図3は、ハウジング及び質量部分の線形運動が前記のように周期T=1/fで時間とともに実質的に正弦波であるとされる場合、時間tの関数としての座標x及びy、並びにそれらの速度及び加速度の漸進的変化を示す。地面Sに対するハウジングの位置xは、歩行者の運動によって与えられる。ハウジングの速度dx/dt及び加速度d2x/dt2もまた、歩行者によって与えられる、すなわち、
dx/dt=2πfXcos(2πft)、
d2x/dt2=−4π2f2Xsin(2πft)。
【0043】
ハウジングに対する質量部分の速度、すなわち、
dy/dt=2πfYcos(2πft+φ)=2πfYsin(2πft)、
は、以下の関係、すなわち、
dy/dt=−(d2x/dt2)(Y/2πfX)、
に従ってハウジングの加速度d2x/dt2に連動させられる。ハウジング内の質量部分の位置y及びその加速度d2y/dt2はそこから生じる。時間0及びT/2において、ハウジングの速度dx/dtは低いけれども最大であり、質量部分の加速度d2y/dt2は、ハウジングの速度と同じ徴候を備えてそのとき最大であり、従って、装置1は、腰のレベルにおいてかなりの力FB、それ故にかなりの動力PBを利用することができる。引き出される動力は、アクチュエータの軸棒121、121aに瞬時に伝達されず、引き出される動力の一部は最初に運動動力に変換される。
【0044】
例えば、図3によれば、質量部分の運動速度をハウジングの加速度に連動させるサーボ制御システムは、平均動力<PA>がゼロではなく一周期の間に積sin(2πft)cos(2πft+φ)に依存するとき、4つの四分の一の周期に実質的に相当し、やや等しい継続期間を有する電磁アクチュエータ11−12の4つの作動段階を備えたサイクルを有する。半周期T/2の初めに、アクチュエータは第1に、降下に従った、すなわち質量部分の上昇とは反対側の方向に従ったハウジングの下方へ方向づけられた加速度が増加する間、実質的にそのストロークの中心まで増加する速度で質量部分13を持ち上げるために、実質的に時間0からT/4までの間においてモータとして作動する、すなわち、アクチュエータによって消費される電気動力が質量部分の加速度を減少させるために運動動力に変換される。次に、実質的に時間T/4からT/2までの間において、アクチュエータは、上昇を終わらせる質量部分のますます強くなる制動を通じて電気動力に変換される運動動力を回収するために、下方への方向に従ったハウジングの加速度の減少の間、上方への方向に従った質量部分の速度をますます減少させるための電気発生器として作動する。次の半周期の初めに、実質的に時間T/2から3T/4までの間において、質量部分は下に行き、アクチュエータは、上方への方向に従ったハウジングの加速度の増加の間、下方への方向に従った質量部分の速度を増加させるためのモータとして作動する。最後に、実質的に3T/4からTまでの間において、発生器として作動するアクチュエータによって及ぼされる上昇を終わらせるますます強くなる質量部分の制動、それ故に上方への方向に従ったハウジングの加速度の減少の間、下方への方向に従った質量部分の速度の減少を通じて質量部分の減速が再び存在する。
【0045】
動力を自動的に引き出すことは、地面のような固定基準に機械的な接触なしにメカトロニクス装置を移動することを通じて生じる。これは、例えば、ハウジングが歩行者の腰につるされる場合にハウジング内の移動式の質量部分が地面に対して静止したままである傾向を有するような慣性を使用することを正当化する。ハウジングに対する質量部分の相対運動は、動力が十分に引き出される状態にアクチュエータが制御されることを可能にする。
【0046】
前記に示したように、回収される動力は、ハウジングの加速度に直接関係する速度をアクチュエータの軸に与える間に最大にされる。サーボ制御システムのおかげで、これら2つの大きさは、同相に保持される。生じる不快感の最小化及び/又は回収される動力の最大化及び/又は実施形態の簡単さなどの狙いとされる目的に従って、サーボ制御システムによって質量部分の速度に与えられる変化は、前の実施例のように、実質的に正弦波、又は実質的に台形、あるいはハウジングの加速度と同一の種類のものであり得る。
【0047】
速度の振幅はハウジング内の質量部分の偏位2Yを調節するために決定される。力FAがアクチュエータの軸のレベルに限定される場合、力FBもまた、反応してハウジングの腰への留め具のレベルに限定される。ハウジングの速度が低い場合、そのとき留め具によってハウジングに伝達される機械動力は非常に減少させられる。換言すれば、ハウジングによって引き出される機械動力、従って引き出される電気動力を増加させるために、本発明は、電気動力を回収するために、加速し、その後にばねに掛かっている質量部分などのあらゆる手段なしに質量部分を制動することを考える。
【0048】
質量部分の大きい偏位2Yは、ハウジングの遅い運動からを含む、動力の回収を高める。歩行者によって運ばれる軽い質量部分は、ハウジングの大きさに適合される大きい偏位2Yを生じさせる強い加速度が質量部分に与えられるという条件で、かなりの動力が引き出されることに適合する。
【0049】
前述したように、ハウジング内の質量部分の垂直運動は正弦波以外であり得る。特にエネルギー評価を最適化するために、本発明は、アクチュエータ11−12がモータとして作動し、アクチュエータに供給される平均動力<PA>がハウジングの加速度d2x/dtと該加速度に連動させられる質量部分の速度dy/dtとの積に比例するときに質量部分13に非常に高い速度を与えるように、実質的に周期Tの時間T/4及び3T/2においてハウジングの加速度の最大値の利益を最も良くすることを考える。質量部分は次に、ハウジングの加速度が実質的に時間0及びT/2のあたりでより小さくなるときに、電気発生器として作動するアクチュエータによって減速させられる。
【0050】
図4は、周期Tより小さい継続期間ΔTの間の実質的に台形の変化に従った周期Tの時間T/4及び3T/2のあたりで突然に増加する質量部分の速度dy/dtを備えた、そのような最適化を示す。その最適化は、補正器144を通じて常に質量部分の最大偏位に対応しハウジングの最大加速度に同期した同一振幅Y及び同一継続期間ΔTである移動式の質量部分の速度「パルス」を発生させる電流設定値を与えるサーボ制御システム14を通じて達せられる。さらに正確に言えば、アクチュエータ11−12は、2つの半周期に対応する作動サイクルの2つの段階を有する。アクチュエータは、ハウジングの加速度の絶対値の増加の間、最大まで上方への方向及び下方への方向に従った質量部分の運動速度を突然増加させるために、実質的に時間(T/4−ΔT/2)からT/4までの間及び(3T/4−ΔT/2)から3T/4までの間に継続期間ΔTの速度パルスのちょうど初めにモータとして突然作動する。ハウジング内の質量部分の速度はそのとき、速度(dy/dt)max=2Y/ΔTに達し得る。実質的に時間(T/4+ΔT/2)から(3T/4−ΔT/2)までの間において、アクチュエータは、ハウジングの加速度の絶対値の減少の間、ゼロへ上方への方向及び下方への方向に従った質量部分の運動速度を減少させるために発生器として突然作動する。速度パルスΔTの間、アクチュエータは作動せず、質量部分はy=0において静止して保持される。
【0051】
継続期間ΔTが周期Tより非常に小さいとすると、平均電力はそのとき、以下のようになる、すなわち、
P=<PA>=(2ΔT/T)m(d2x/dt2)max(dy/dt)max、すなわち、
P=(2ΔT/T)m(4π2f2X)(2Y/ΔT)、すなわち、
P=16π2mf3XY。
【0052】
例えば、質量部分が0.2kgの重さを有し、Y=4cmである偏位振幅で連動させられ、歩行者の腰において運ばれるアクチュエータが振幅X=6cm、周波数f=2Hzの振動を受けるとすると、移動式の質量部分の速度ピークを備えた最適化が図4に従って行われる場合、回収される動力はほぼP=0.605W程度である。
【0053】
そのような最適化なしでは、回収される動力は以下の通りである、すなわち、
<PA>=−m<(d2x/dt2)(dy/dt)>、すなわち、
P=−m4π2f2X2πfY(sin(−π/2))/2=4π3mf3XY、すなわち、
P=0.475W。
【0054】
その最適化は、単なる速度サーボ制御システムを備えた実施形態について4/πという係数を得ることができる。
【0055】
さらに概括的に言えば、質量部分の速度dy/dtは、時間T/4及び3T/2のあたりで非対称的に増加及び減少させることができる。
【0056】
代替形態を備えた前述したような本発明の第1の実施形態は、例えば移動式のセル方式の端末、有酸素運動タキメータ、又は動物によって運ばれるGPS位置確認装置などの小型電気アイテムに出力電圧VSを供給するために十分である。
【0057】
貯蔵装置16によって消費され得る電気動力を保存するために、加速度計142が所定期間ハウジングの運動を検出しないならばアクチュエータ11−12及びサーボ制御システム14に供給しないようにスイッチがその出力において配置され得る。別の代替形態によれば、クロックが、メカトロニクス装置1内に含まれ、速度センサ141が質量部分の運動を随意的に検出するように又は加速度計142がハウジングの運動を随意的に検出するように、メカトロニクス装置1を起こさせるために各所定期間の満了時に使用される。
【0058】
機械/電気変換及び電気貯蔵においてさらに多くの電気動力を保存するために、引き出される電気動力の減少に不利益であるが、図3を参照して実質的に時間0からT/4までの間と実質的に時間T/2から3T/4までの間に及ぶアクチュエータの作動サイクルの一部の間、サーボ制御システム14はモータとしてアクチュエータ11−12をもはや制御しない。前記サイクルのそれらの部分の間、質量部分12−13は自由に移動する。サーボ制御システム14は、実質的に時間T/4からT/2までの間と実質的に時間3T/4からTまでの間に及ぶアクチュエータの作動サイクルの別の一部の間、電気動力貯蔵装置16を充電するための発生器としてアクチュエータを制御するために作動するのみである。
【0059】
前記説明はまた、自然振動運動が別の方向、例えばボートにおける縦揺れ又は横揺れに従うと考えられる場合に有効である。そのとき質量部分は自然振動を受けるが、その重量の効果は水平にキャンセルすることができ、例えば静止時にバランスをとる必要を取り除くことができる。前記装置のアセンブリは振り子の種類であり得る。
【0060】
ここで図5及び図6を参照すると、本発明の第2の実施形態に係るメカトロニクス電気動力発生装置2は、本発明の第1の実施形態に係るハウジング10及び質量部分13の直線運動に代えて、回転運動で駆動され得るハウジング及び質量部分23を有する。質量部分23は、可逆的回転アクチュエータ21−22の固定電機子21に回転可能な回転誘導子22の軸棒221の一端に固定される慣性ホイールを有し得る。代替的には、前記慣性ホイールは、軸棒221の一端に固定される直径ロッド(diametrical rod)に固定される又は対称的に自由に滑動することができる、又はサーボ制御システム24を通じて連動させられるように直径ロッドに対称的に滑動することができる、あるいは、軸棒の端部に固定される別の頂点を有するとともにサーボ制御システム24を用いて連動させられる変形を有する変形可能な四辺形の2つの反対側の頂点の端部に配置される2つのカウンターウェイトによって取り換えられる。直径ロッドに移動可能なカウンターウェイトを備えた又は変形可能な四辺形を備えた代替形態は、質量部分の慣性モーメントがアクチュエータの作動サイクルの連動させられる段階に応じて調節されることを可能にする。プランジャーシステムはまた、回転軸に対する質量部分の慣性モーメントを調節するための非圧縮性流体を移動することができる。
【0061】
質量部分23の偏位2θYはここでは角度がつけられ、ハウジングの垂直方向の大きさによってもはや限定されない。
【0062】
図7は、線形アクチュエータより標準的な磁石同期回転機械の形をした、例えば4つの極を備えた可逆的回転電磁アクチュエータを含む本発明に係るメカトロニクス装置の第2の実施形態をさらに詳細に示す。
【0063】
メカトロニクス装置2は、アクチュエータ21−22を収容するハウジング20、アクチュエータの円筒形回転誘導子22によって本質的に構成される移動式の質量部分及び電気回路24−26を含む。回転誘導子の慣性が不十分である場合、質量部分は、図5に示す慣性ホイール23などの回転誘導子の軸棒221と一体化した小型ホイールによって完成され得る。図7では、ハウジング20は、例えば歩行者の腰の下に又は脚に固定される垂直の支えの形をして部分的に示される。ハウジング20は、軟鋼製円筒形バレル212の端部に固定される支柱211のまわりのボールベアリング201を通じて回転配置される。アクチュエータの円筒形固定電機子21は、円筒形バレル212の内部表面に固定され、該円筒形バレルの端部は、閉じられて2つのボールベアリング213を用いて回転誘導子22の軸棒221のまわりに回転可能に取り付けられる。円筒形バレル212の外部表面は、サーボ制御システム24、可逆的増幅アンジュレータ25及び小型電気動力貯蔵装置26を支持する。固定電機子21は、回転誘導子22の急速な回転運動に対して比較的遅い回転運動で駆動される。
【0064】
円筒形電機子21の一端は、ボールベアリング201によってハウジング20から回転可能に分離した支柱211を支持する。ボールベアリング213は、回転電機子22を回転可能に分離する。そのような分離は、固定電機子が遅い角度振動によって付勢されるのみであるので、回転誘導子の急速な回転のために起こり得る振動からハウジング20を分離することによって前記装置2を運ぶ歩行者の快適さを改善する。
【0065】
別の回転アクチュエータによれば、電機子と誘導子の相対位置は反対にすることができる。電機子が中心に位置して軸棒221に固定され、増幅アンジュレータ25にブラシをこすりつけることによって接続される。誘導子は、周囲に位置して円筒形バレル212の内部表面に固定される。
【0066】
図示されていない別の代替形態によれば、メカトロニクス装置の慣性の大部分を利用するために、慣性ホイールは、貯蔵装置26などの電気回路24−26の幾つかの比較的重い構成要素などのメカトロニクス装置の幾つかの構成要素の質量によって、及び/又は
移動式のセル方式の端末が貯蔵装置26によって出力電圧VSを供給される場合に移動式のセル方式の端末によって取り換えられる。そのような付加質量は、全体の慣性を利用するためにアクチュエータ21a−22a、21b−22bの軸棒221a、221bに固定される。
【0067】
第2の実施形態では、電気回路24−26の反対側の円筒形固定電機子21を支持する円筒形バレル212の端部において、連結アーム214は、歩行者によって発生させられる遅い振動運動で駆動され得るように固定され得る。固定電機子21の円筒形バレル212に固定された角速度測定センサは、軸棒221に対して直径方向に反対側に2つの小型加速度計215を有する。加速度計215は、ハウジングが歩行者の脚から垂れ下げられる場合、地面に実質的に平行な加速度測定感受性方向に従って反対側の加速度を測定することができる。
【0068】
アクチュエータ21−22を制御するための図8に示す電子サーボ制御システム24は、第1の実施形態に係るサーボ制御システム14と同様である。電子サーボ制御システム24は、図2に示す第1の実施形態と同様に、誘導子21の角回転速度を測定する速度センサ241と、制御回路243−244−25の差動入力に接続される二重加速度計センサ242とを含む。固定電機子21の角加速度d2θx/dt2と回転誘導子22を本質的に有する質量部分の角速度dθy/dtとに関する関係に応じて、制御回路内の補正器244は、減算乗算器243から、一方では、測定された角加速度と特に角加速度及び角速度の振幅に依存する所定の係数との積と、他方では、角速度dθy/dtに比例する大きさとの間の差を補正し、得られる差をハウジングの角度位置θxに依存する設定値の値と比較する。比較の結果は、アクチュエータが電圧源として使用される電気動力貯蔵装置26を備えたモータとして又は貯蔵装置16を電気的に充電するための発生器として作動するようにアクチュエータに電流及び電圧を与えるために、電気動力貯蔵装置26に接続される増幅アンジュレータ25に入力電圧を適用するために使用される。
【0069】
例えば、メカトロニクス装置2は、歩行者の手首又は大腿部において運ばれ得る、又はボートに固定され得る。
【0070】
第1の実施形態の場合のように、貯蔵装置26によって消費され得る電気動力を保存するために、電気回路24−26の供給は、二重加速度計センサ242が所定期間ハウジングのあらゆる運動を検出しないならばアクチュエータ21−22及びサーボ制御システム24に供給しないようにスイッチによって手動で切断され得る。
【0071】
メカトロニクス装置2の作動原理は、第1の実施形態に係るメカトロニクス装置1の作動原理と本質的に同様であり、線形速度を角回転速度に対応させ、線形加速度を角回転加速度に対応させる。少なくともボールベアリング201によって与えられる固定電機子21に対するハウジング20の機械的な分離を用いて、固定電機子は、機械動力が回収される歩行者などの移動システムの自然運動によって駆動される。前記システムの運動は、歩行者の大腿骨頸のまわり、又は歩行者の手首のレベルにおいて、又は横揺れ及び/又は縦揺れを受けるボートにおける場合のような回転成分を有する。固定電機子21の自然振動によって回収される動力は、固定電機子の角加速度と直接関係する角速度を回転誘導子22によって構成される回転する質量部分に与えることによって最大にされる。しかしながら、第2の実施形態では、回転誘導子22の自己の角速度は、ハウジング20の大きさの制約によってもはや限定されず、最大動力が回収される固定誘導子21の小さい角速度に比べて大きくなり得る。
【0072】
図6では、三角方向(trigonometric direction)に従って方向づけられた矢印は、歩行者の体によって固定電機子に及ぼされるトルク抵抗CBを示す。反対側の三角方向に従って方向づけられた矢印は、アクチュエータの軸棒221に及ぼされる慣性ホイール23及び回転誘導子22の作用CAを示す。例えば地面に関連づけられた垂直線Vに対する固定電機子21の角度位置及び固定電機子の回転運動の角度振幅は、θx及びθXによって表される。固定電機子の半径Rに関連づけられた基準系に対する質量部分の角度位置及びハウジング内の質量部分の回転運動の振幅は、θy及びθYによって表される。ハウジング及びすべての構成要素を備えた装置2は全慣性モーメントJを有し、特に回転電機子22、軸棒221及び随意的に慣性ホイール23を有する全体の移動式の質量部分22−23は慣性モーメントjを有する。
【0073】
質量部分22−23が同時に回転している間に、ハウジングが回転運動を受ける場合、トルクCA及びCBが、以下の方程式によって与えられる、すなわち、
CA=jd2θx/dt2+jd2θy/dt2、
CB=(J−j)d2θx/dt2+CA=Jd2θx/dt2+jd2θy/dt2。
【0074】
軸棒221を用いてアクチュエータ21−22に供給される瞬時動力PAと歩行者の脚へのハウジングのためのフック位置において歩行者から引き出される瞬時動力PBとは、以下の「トルク×角速度」の形式の積によって表される、すなわち、
PA(t)=−CAdθy/dt、
PB(t)=CBdθx/dt。
このような動力は、ハウジング内の摩擦を除き、回転全てが周期的であるとし、同じ変数θx又はθyに依存するこれらの微分積全てが平均してゼロであることを与えると、同じ平均値Pを有する。そのとき前の動力の平均動力は、以下のようになる、すなわち、
P=<PA>=−j<(d2θx/dt2)(dθy/dt)>、
P=<PB>=j<(d2θy/dt2)(dθx/dt)>。
【0075】
第1の前の関係は、発生器として作動するアクチュエータに供給される機械動力が歩行者によって固定電機子に与えられる角加速度d2θx/dt2及び固定電機子に対する質量部分の角速度dθy/dtに依存することを表している。固定電機子に与えられる加速度d2θx/dt2が歩行者に依存することを知っているので、本発明は、固定電機子の加速度に質量部分の速度dθy/dtを連動させる。固定電機子の角加速度の小さい変化において、回転誘導子、従って質量部分の速度が大きくなればなるほど、回収される動力の量が大きくなる。固定電機子の角加速度における質量部分の角速度の調節は、図2に関連して記載したように、図8に示す電子サーボ制御システム24によって付与される。
【0076】
例えば、モータとして作動するアクチュエータ21−22が固定電機子内の質量部分22−23に時間の関数として実質的に正弦波の回転を与え、固定電機子が地面に対して実質的に正弦波の回転に従って交互に移動することが考えられる、すなわち、
θx=θXsin(2πft)、
θy=θYsin(2πft+φ)、
ここで、fは実質的に正弦波の運動の周波数、φは平均動力Pを最大にするために−π/2に等しいそれらの間の位相シフトである。P=<PA>において、これは、固定電機子に対する質量部分の角速度が固定電機子の角加速度に連動させられることをもたらし、それは、質量部分の角加速度をP=<PB>に従って固定電機子の角速度に連動させることを行うことをより容易にする。
【0077】
これらの仮説を用いて、センサ242から離れて十分に間隔をあけて配置される2つの加速度計215によって測定され得る固定電機子の角加速度、すなわち、
d2θx/dt2=−4π2f2θXsin(2πft)
に対する質量部分の角速度、すなわち、
dθy/dt=2πfθYcos(2πft−π/2)=2πfθYsin(2πft)
の依存関係は、以下の通りである、すなわち、
dθy/dt=−(θY/2πfθX)(d2θx/dt2)。
パラメータf及びθxは、測定された固定電機子の加速度d2θx/dt2から導き出され得る。質量部分の振幅θYは、ハウジングの大きさによってもはや限定されない。
【0078】
そのとき平均動力は、以下のようになる、すなわち、
P=<PA>=−j<(d2θx/dt2)(dθy/dt)>=<PB>、すなわち、
P=−j(−4π2f2θX)(2πfθY)/2=4π3jf3θXθY
【0079】
図3はまた、固定電機子及び質量部分の回転が周期T=1/fで時間とともに実質的に正弦波であるとされる場合、時間tの関数としての角度位置θx及びθy、並びにそれらの速度及び加速度の漸進的変化を示す。垂直線Vに対する固定電機子の角度位置θxは、歩行者の運動によって与えられる。固定電機子の速度dθx/dt及び加速度d2θx/dt2もまた、歩行者によって与えられる、すなわち、
dθx/dt=2πfθXcos(2πft)、
d2θx/dt2=−4π2f2θXsin(2πft)。
【0080】
固定誘導子に対する質量部分の角速度、すなわち、
dθy/dt=2πfθYcos(2πft+φ)=2πfθYsin(2πft)
は、以下の関係、すなわち、
dθy/dt=−(θY/2πfθX)(d2θx/dt2)
に従って固定電機子の角加速度に連動制御させられる。ハウジング内の質量部分の角度位置θy及びその加速度d2θy/dt2はそこから生じる。時間0及びT/2において、固定誘導子の角速度dθx/dtは低いけれども最大であり、質量部分の角加速度d2θy/dt2は固定誘導子の速度と同じ徴候を備えてそのとき最大となり、従って、装置2は、高いトルクCBを利用することができ、これは、脚のレベルにおいてかなりの動力PBである。引き出される動力は、アクチュエータの軸棒221に瞬時に伝達されず、引き出される動力の一部は最初に運動動力に変換される。
【0081】
例えば、図3によれば、半周期T/2の間、アクチュエータ21−22は、固定誘導子の角加速度が反対側の三角方向に従って増加する間、半径Rまで実質的に増加する角速度で三角方向に従って質量部分22−23を回転するために、実質的に時間0からT/4までの間においてモータとして作動し、アクチュエータによって消費される電気動力は、質量部分の加速度を減少させるために運動動力に変換される。次に、実質的に時間T/4からT/2までの間において、アクチュエータは、固定電機子の角加速度が反対側の三角方向に従って減少する間、三角方向に従った角速度が減少する質量部分を減速させることによって運動動力を回収するために電気発生器として作動する。次の半周期の間、実質的に時間T/2からTまでの間、質量部分は、反対側の三角方向に従って回転し、三角方向に従った角加速度の増加の間、モータとして作動するアクチュエータによる質量部分の角速度の増加が再び存在し、次に三角方向に従った固定誘導子の角加速度の減少の間、アクチュエータによる減速を通じて質量部分の角速度の減少が存在する。
【0082】
従って、各歩行者の歩みの間、アクチュエータ21−22は、両方の回転方向に作動する、すなわち、一方でアクチュエータはその運動を加速し、従って電気動力を消費し、他方で電気動力を回収し、従って運動を減速させる。アクチュエータの運動は、歩行者が抵抗を感じるように歩行者の運動に同期され、幾つかの機械動力の徴候が歩行者の運動から回収され、アクチュエータによって変換され、電気回路を用いて電気動力貯蔵装置26に伝達される。そのような動力は、質量部分22−23が動力を一時的に貯蔵するので貯蔵装置に瞬時に伝達されない。運動及びその分解(resolution)を前述した方程式に変換することは、電気動力又はアクチュエータのレベルにある機械動力が平均値より絶対値において非常に高くなり得る2つの極値の間で振動することを示し、平均値は、貯蔵装置が再充電されることを確保する。
【0083】
定性的に、歩行者が十分な動力を得るためにかなりの尽力を感じることが要求されるので、アクチュエータ21−22は、歩行者の運動が比較的長く、腰のレベルにおいて脚の回転が遅い角速度を有するとき質量部分22−23を突然に加速及び減速する。
【0084】
既に指摘したように、回収される動力はすべて、質量部分の角速度が大きく、従って角速度の変化が小さいときより大きい。本発明に係るアクチュエータの作動の代替形態はそのとき、固定誘導子の最大角速度より実質的に非常に大きい、大きい公称角速度で質量部分22−23を回転駆動させることと、この公称角速度のあたりの質量部分の角速度dθy/dtを変更することとを有する。この代替形態は、例えば貯蔵装置26の平均電圧より大きい、大きい平均電圧で電気回路24−26を作動し、質量部分及び歩行者の間の大きい慣性連結を永久に有するという利点を有する。
【0085】
代替的に、サーボ制御システムは、質量部分の最大角速度が、ただ1つの歩みに代えて幾つかの歩行者の歩みにおいて達せられるようであり得る。
【0086】
ハウジング20内の質量部分22−23の運動は、正弦波以外であり得る。特にエネルギー評価を最適化するために、本発明は、アクチュエータがモータとして作動し、アクチュエータ21−22に供給される平均動力<PA>が、固定電機子の加速度d2θx/dt2と該加速度に連動させられる質量部分の速度dθy/dtの積に比例するときに、非常に高い速度を質量部分に突然に与えるように、実質的に周期Tの時間T/4及び3T/2において固定電機子の加速度の最大値の利益を最も良くすることを考える。質量部分は次に、固定電機子の加速度が絶対値において減少するときに電気発生器として作動するアクチュエータによって減速させられる。
【0087】
しかしながら、第2の実施形態では、ハウジング内の運動における質量部分の偏位に関する制約がもはや存在しない。その結果、時間間隔ΔTはもはやこのように限定されず、固定誘導子の最も低い加速度の利益をとるために半周期T/2に随意的に達することができる。
【0088】
図4はまた、周期Tより短い継続期間ΔTにおいて対称的な増加及び減少を有する実質的に台形の変化に従った周期Tの時間T/4及び3T/2のあたりで突然に増加する質量部分の角速度dθy/dtを備えた最適化の実施例を示す。その最適化は、補正器244を通じて常に質量部分の最大偏位に対応しハウジングの最大加速度に同期した同一振幅Y及び同一継続期間ΔTである移動式の質量部分の速度「パルス」を発生させる電流設定値を与えるサーボ制御システム24を用いて達せられる。
【0089】
継続期間ΔTが半周期T/2に実質的に等しいとすると、平均電力はそのとき、以下のようになる、すなわち、
P=<PA>=(2/π)j(d2θx/dt2)max(dθy/dt)max、すなわち、
P=(2/π)j(4π2f2θX)(dθy/dt)max、すなわち、
P=8πjf2θX(dθy/dt)max。
【0090】
例えば、第1の実施形態の実施例のように、m=0.2kgの同じ質量部分であるが、
半径r=4cmのリングなどの多少小型の中空円筒形バレルの形をし、質量部分の慣性モーメントがj=mr2=0.00032kgm2、最大角速度(dθy/dt)maxが10,000rpm、すなわち1047rd/sを有し、歩行者の腰において運ばれるアクチュエータ21−22が振幅θX=0.35rd及び周波数f=1Hzの振動を受けると、質量部分の速度が正弦波形状の固定電機子の加速度に連動させられる場合、回収され得る最大動力は3Wである。
【0091】
移動式の質量部分の速度ピークを備えたそのような最適化なしでは、技術的理由のために、質量部分22−23の振幅θYがハウジング20の大きさによってもはや限定されないとき、移動式の質量部分の角回転速度を最大値(dθy/dt)maxに限定することが好ましい。従って、振幅θYは、最大速度、すなわちθY=(1/2πf)(dθy/dt)maxに依存する。そのとき回収される動力は、以下のようになる、すなわち、
P=4π3jf3θXθY=4π3jf3θX((dθy/dt)max/2πf)、
P=2π2jf2θX(dθy/dt)max、すなわち、
P=2.3W。
【0092】
その最適化は、単なる速度サーボ制御を備えた実施形態について4/πという係数を得ることができる。
【0093】
代替的には、質量部分の角速度の変化が時間T/4及び3T/2のあたりで非対称である。
【0094】
また別の代替形態によれば、サーボ制御システムは、回転アクチュエータの作動サイクルが、特に質量部分の最大角速度に達するための多数の歩みが質量部分の最小角速度に達するための多数の歩みとは異なる非対称な方法で、幾つかの歩行者の歩みに及んでいるようであり得る。
【0095】
別の実施例によれば、質量mを有する質量部分23は、半径rを有する回転ディスクの形をしている。慣性モーメントj=mr2/2及び角速度(dθy/dt)を備えた回転電機子の全運動動力は、以下のとおりである、すなわち
E=j(dθy/dt)2/2。
【0096】
角速度の変化は、動力を引き出すために固定電機子の遅い駆動運動との相互作用を通じた動力の変化及び貯蔵装置26に動力を戻すための反対側の変化を引き起こす、すなわち、
P=dE/dt=j(dθy/dt)(d2θy/dt2)。
従って、小さい角速度変化において、回収される動力はすべて質量部分の角速度が高いときにより高くなる。
【0097】
回転ディスクの2つの角速度の間の動力変化は、2つの動力状態の間の経路から独立した2つの動力状態の間において、
ΔE=j((dθy/dt)12−(dθy/dt)22)/2
によって規定される。
【0098】
そのとき本発明に係るアクチュエータの作動の代替形態は、大きい公称角速度において質量部分22−23を回転駆動させることと、そのような公称角速度のあたりで質量部分の角速度dθy/dtを変更することとを有する。そのような代替形態は、貯蔵装置26の平均電圧より高い、高い平均電圧で電気回路24−26を作動することと、例えば、質量部分とアクチュエータとの間の大きい慣性連結を永久に有することという利点を有する。
【0099】
例えば、回転ディスクの角速度が(dθy/dt)1=8000rpmから(dθy/dt)2=6000rpmまでの間で変化するとき、質量m=0.05kg及び半径r=0.03mを有する回転ディスクによって得られる慣性は、ΔE=3.3Jである。脚の加速/減速の継続期間が約1秒で、損失を除く平均機械動力E/Tはそのとき、P=3.5Wである。
【0100】
引き出される動力の限界はまた、使用者である歩行者の快適さに依存する。その反力は、脚においてあまり大きくなく且つ規則的でない必要があり、また克服される重要なジャイロ力があまりない必要がある。実際的には、本発明に係る2つのメカトロニクス装置は、体の両側に対称に配置される。そのとき回収される動力は、移動式のセル方式の端末の少なくとも一部を再充電するのに十分であるワットのオーダーである。
【0101】
その最適化に反して、電気動力貯蔵装置26による電気動力の消費を回避するために、またサーボ制御システムを簡単にするために、サーボ制御システム24は、図3に関して実質的に時間0からT/4までの間及び実質的に時間T/2から3T/4までの間に及ぶアクチュエータの作動サイクルの一部の間、モータとしてアクチュエータ21−22をもはや制御しない。前記サイクルのそれらの部分の間、質量部分22−23は自由に移動する。サーボ制御システム24は、実質的に時間T/4からT/2までの間及び実質的に時間3T/4からTまでの間に及ぶアクチュエータの作動サイクルの別の一部の間、電気動力貯蔵装置26に取り込むための発生器としてアクチュエータを制御するために作動するのみである。
【0102】
本発明の第1及び第2の実施形態の代替形態によれば、特にアクチュエータがモータとして作動するとき、質量部分を加速するために、アクチュエータを補助するためのばねなどの弾性手段がハウジングと質量部分との間に導入される。
【0103】
第1の実施形態のための図9に示すように、圧縮螺旋ばね17は、ハウジング10の底面101及び質量部分13に連結される端部を有する。質量部分13は、例えばハウジング101の底面に深く下(y<0)にある場合、質量部分は、図3において0からT/4までの四分の一の周期に示されるように、上部まで多かれ少なかれ完全に加速されることとなる。質量部分が下向きであるときに圧縮されるばね17は、質量部分が減速させられる前に最大速度に達するまで重力に逆らって質量部分を上向きに押すために弱められる。代替的に、別の圧縮螺旋ばねは、ハウジング10の上部及び質量部分に連結される端部を有する。
【0104】
第2の実施形態において、弾性手段は、図10に示すように、周囲の端部271がハウジング20に固定され、中心の端部272が回転誘導子22の軸棒221のまわりに固定される螺旋ばね27からなる。回転誘導子が両方向に非常に多くの回転を行うと考えられる場合、ばねとアクチュエータとの間に非増加(demultiplication)が導入される。最後の螺旋に半径方向のカーソルを備えた剛性調節手段273は、ばね27の剛性を歩行者に応じて多かれ少なかれ調節することができる。
【0105】
ばねは、固定電機子に与えられる運動の周波数が質量部分及びばねアセンブリの自己の振動周波数からあまり外れないという条件の下に、アクチュエータの重量及び容積を大幅に低減する。幾つかの適用において、ばねの剛性を調節するためのカーソル273などの手段は、できる限りそれらの周波数を適合させるために使用される。
【0106】
代替形態によれば、螺旋ばねは、軸棒221のまわりに反対側にねじれて配置される螺旋ばねによって完成される、又は軸棒221の一端のまわりに配置される反対側の軸ねじりを有する1つの圧縮螺旋ばねあるいは2つの圧縮螺旋ばねによって取り換えられる。
【0107】
サーボ制御システムはまた、1つ又は2つのばねなどの弾性手段の剛性に関連し得る。
【0108】
実施例として、以下の大きさにおいて、すなわち、回転誘導子の巻線の銅の抵抗率がρ=1.8×10−8Ωm、回転誘導子の平均半径が4cm、アクチュエータの磁気誘導が1.5T、f=1Hzあたりの固定電機子の角運動において回収される電気動力が2.3W、銅の損失が約0.23W、0.9Hzから1.1Hzの範囲においてばねなしの駆動トルク2.3mNに代えてばねを用いた駆動トルクが0.44mNにおいて、2.1cm3及び約20gの銅が、ばねのない実施形態のための57.5cm3及び550gの銅に代えて、ばねを用いた実施形態のために得られる。回収される等しい動力において、ばねを備えた実施形態は、はるかに経済的で、さらに小型化することができる。
【特許請求の範囲】
【請求項1】
電気動力貯蔵手段(16、26)に電気的に接続され、振動速度運動を受けることができる第1部材(11、21)及び該第1部材に対して速度について振動することができる質量部分(13、23)の少なくとも一部を構成する第2部材(12、22)を有するアクチュエータ(11−12、21−22)を用いて電気動力を発生させる方法であって、
前記アクチュエータの作動サイクルの一部の間、前記貯蔵手段を充電する発生器として前記アクチュエータを制御するために、前記第1部材の振動運動に対する前記質量部分の運動をサーボ制御することを有し、
該質量部分(13、23)は、前記アクチュエータ(11−12、21−22)の作動サイクルの別の一部の間、自由に移動する、
ことを特徴とする方法。
【請求項2】
電気動力貯蔵手段(16、26)に電気的に接続され、振動速度運動を受けることができる第1部材(11、21)及び該第1部材に対して速度について振動することができる質量部分(13、23)の少なくとも一部を構成する第2部材(12、22)を有するアクチュエータ(11−12、21−22)を用いて電気動力を発生させる方法であって、
前記アクチュエータの作動サイクルの一部の間、前記貯蔵手段を充電する発生器として前記アクチュエータを制御するために、前記第1部材の振動運動に対する前記質量部分の運動をサーボ制御することと、
前記アクチュエータ(11−12、21−22)の作動サイクルの別の一部の間、前記貯蔵手段によって供給されるモータとして前記アクチュエータを制御するために、前記第1部材の振動運動に対する前記質量部分の運動をサーボ制御することと、
を有することを特徴とする方法。
【請求項3】
発生器として前記アクチュエータを制御するサーボ制御は、前記第1部材の加速度に連動させられる前記質量部分の運動速度に関連している、
ことを特徴とする請求項1又は請求項2に記載の方法。
【請求項4】
前記アクチュエータ(11−12、21−22)の作動サイクルは、所定の方向と反対側の方向に従った前記第1部材の加速度の増加の間、前記所定の方向に従った前記質量部分の運動速度を増加させるためのモータとしての前記アクチュエータ(11−12、21−22)の作動段階(0−T/4)と、前記反対側の方向に従った前記第1部材の加速度の減少の間、前記所定の方向に従った前記質量部分の運動速度を減少させるための発生器としての前記アクチュエータの作動段階(T/4−T/2)と、前記所定の方向に従った前記第1部材の加速度の増加の間、前記反対側の方向に従った前記質量部分の運動速度を増加させるためのモータとしての前記アクチュエータの作動段階(T/2−3T/4)と、前記所定の方向に従った前記第1部材の加速度の減少の間、前記反対側の方向に従った前記質量部分の運動速度を減少させるための発生器としての前記アクチュエータの作動段階(3T/4−T)とを有する、
ことを特徴とする請求項2に記載の方法。
【請求項5】
前記アクチュエータ(11−12、21−22)の作動サイクルは、前記第1部材の加速度が最大値のあたりで変化するときに前記質量部分の運動速度を増加及び減少させるためのモータとしての前記アクチュエータの作動段階(ΔT)を有する、
ことを特徴とする請求項2に記載の方法。
【請求項6】
電気動力貯蔵手段(16、26)に電気的に接続され、振動速度運動を受けることができる第1部材(11、21)及び該第1部材に対して速度について振動することができる質量部分(13、23)の少なくとも一部を構成する第2部材(12、22)を有するアクチュエータ(11−12、21−22)を含む電気動力発生装置であって、
前記アクチュエータの作動サイクルの一部の間、前記質量部分の運動を前記第1部材の振動運動に連動させることによって、前記貯蔵手段を充電する発生器として前記アクチュエータを制御するための、また、前記アクチュエータの作動サイクルの別の一部において、前記貯蔵手段(16、26)によって供給されるモータとして前記アクチュエータ(11−12、21−22)を制御するためのサーボ制御手段(14、24)を有する、
ことを特徴とする電気動力発生装置。
【請求項7】
前記サーボ制御手段(14、24)は、前記第1部材(11、21)の加速度を測定するための手段(142、242)と、前記質量部分の運動速度を測定するための手段(141、241)と、前記質量部分の運動速度を前記第1部材の加速度に連動させるように前記アクチュエータを制御する手段(143、144、15、16;243、244、25、26)とを有する、
ことを特徴とする請求項6に記載の電気動力発生装置。
【請求項8】
前記サーボ制御手段は、測定された前記第1部材の加速度と前記第1部材の位置に応じて可変する設定点に対して測定された前記質量部分の運動速度とに応じてパラメータを補正するための手段(143、144;243、244)と、前記アクチュエータから回収される、又は前記アクチュエータに供給される電気動力の変化を、補正されたパラメータに従って前記貯蔵手段(16、26)の端子における電流及び電圧に向かわせるように適合させるための可逆的増幅アンジュレータ(15、25)と、を有する、
ことを特徴とする請求項7に記載の電気動力発生装置。
【請求項9】
前記質量部分(23)の運動は回転であり、前記アクチュエータ(21−22)は回転する、
ことを特徴とする請求項6に記載の電気動力発生装置。
【請求項10】
前記サーボ制御手段は、前記第1部材の最大角速度より大きい公称速度のあたりに前記質量部分(22、23)の運動速度を変更することができる、
ことを特徴とする請求項9に記載の電気動力発生装置。
【請求項11】
前記第1部材(21)から前記アクチュエータ(21−22)を支持するハウジング(20)を回転可能に分離するための手段を有する、
ことを特徴とする請求項10に記載の電気動力発生装置。
【請求項12】
前記アクチュエータがモータとして作動するときに前記質量部分(13、23)を加速させるように前記アクチュエータを補助するための、前記アクチュエータ(11−12、21−22)を支持するハウジング(10、20)に固定される弾性手段(17、27)を有する、
ことを特徴とする請求項6に記載の電気動力発生装置。
【請求項13】
移動式の質量部分(13、23)は、取り外し可能な方法で前記貯蔵装置(16、26)に接続された移動式の端末の少なくとも一部を含む、
ことを特徴とする請求項6に記載の電気動力発生装置。
【請求項1】
電気動力貯蔵手段(16、26)に電気的に接続され、振動速度運動を受けることができる第1部材(11、21)及び該第1部材に対して速度について振動することができる質量部分(13、23)の少なくとも一部を構成する第2部材(12、22)を有するアクチュエータ(11−12、21−22)を用いて電気動力を発生させる方法であって、
前記アクチュエータの作動サイクルの一部の間、前記貯蔵手段を充電する発生器として前記アクチュエータを制御するために、前記第1部材の振動運動に対する前記質量部分の運動をサーボ制御することを有し、
該質量部分(13、23)は、前記アクチュエータ(11−12、21−22)の作動サイクルの別の一部の間、自由に移動する、
ことを特徴とする方法。
【請求項2】
電気動力貯蔵手段(16、26)に電気的に接続され、振動速度運動を受けることができる第1部材(11、21)及び該第1部材に対して速度について振動することができる質量部分(13、23)の少なくとも一部を構成する第2部材(12、22)を有するアクチュエータ(11−12、21−22)を用いて電気動力を発生させる方法であって、
前記アクチュエータの作動サイクルの一部の間、前記貯蔵手段を充電する発生器として前記アクチュエータを制御するために、前記第1部材の振動運動に対する前記質量部分の運動をサーボ制御することと、
前記アクチュエータ(11−12、21−22)の作動サイクルの別の一部の間、前記貯蔵手段によって供給されるモータとして前記アクチュエータを制御するために、前記第1部材の振動運動に対する前記質量部分の運動をサーボ制御することと、
を有することを特徴とする方法。
【請求項3】
発生器として前記アクチュエータを制御するサーボ制御は、前記第1部材の加速度に連動させられる前記質量部分の運動速度に関連している、
ことを特徴とする請求項1又は請求項2に記載の方法。
【請求項4】
前記アクチュエータ(11−12、21−22)の作動サイクルは、所定の方向と反対側の方向に従った前記第1部材の加速度の増加の間、前記所定の方向に従った前記質量部分の運動速度を増加させるためのモータとしての前記アクチュエータ(11−12、21−22)の作動段階(0−T/4)と、前記反対側の方向に従った前記第1部材の加速度の減少の間、前記所定の方向に従った前記質量部分の運動速度を減少させるための発生器としての前記アクチュエータの作動段階(T/4−T/2)と、前記所定の方向に従った前記第1部材の加速度の増加の間、前記反対側の方向に従った前記質量部分の運動速度を増加させるためのモータとしての前記アクチュエータの作動段階(T/2−3T/4)と、前記所定の方向に従った前記第1部材の加速度の減少の間、前記反対側の方向に従った前記質量部分の運動速度を減少させるための発生器としての前記アクチュエータの作動段階(3T/4−T)とを有する、
ことを特徴とする請求項2に記載の方法。
【請求項5】
前記アクチュエータ(11−12、21−22)の作動サイクルは、前記第1部材の加速度が最大値のあたりで変化するときに前記質量部分の運動速度を増加及び減少させるためのモータとしての前記アクチュエータの作動段階(ΔT)を有する、
ことを特徴とする請求項2に記載の方法。
【請求項6】
電気動力貯蔵手段(16、26)に電気的に接続され、振動速度運動を受けることができる第1部材(11、21)及び該第1部材に対して速度について振動することができる質量部分(13、23)の少なくとも一部を構成する第2部材(12、22)を有するアクチュエータ(11−12、21−22)を含む電気動力発生装置であって、
前記アクチュエータの作動サイクルの一部の間、前記質量部分の運動を前記第1部材の振動運動に連動させることによって、前記貯蔵手段を充電する発生器として前記アクチュエータを制御するための、また、前記アクチュエータの作動サイクルの別の一部において、前記貯蔵手段(16、26)によって供給されるモータとして前記アクチュエータ(11−12、21−22)を制御するためのサーボ制御手段(14、24)を有する、
ことを特徴とする電気動力発生装置。
【請求項7】
前記サーボ制御手段(14、24)は、前記第1部材(11、21)の加速度を測定するための手段(142、242)と、前記質量部分の運動速度を測定するための手段(141、241)と、前記質量部分の運動速度を前記第1部材の加速度に連動させるように前記アクチュエータを制御する手段(143、144、15、16;243、244、25、26)とを有する、
ことを特徴とする請求項6に記載の電気動力発生装置。
【請求項8】
前記サーボ制御手段は、測定された前記第1部材の加速度と前記第1部材の位置に応じて可変する設定点に対して測定された前記質量部分の運動速度とに応じてパラメータを補正するための手段(143、144;243、244)と、前記アクチュエータから回収される、又は前記アクチュエータに供給される電気動力の変化を、補正されたパラメータに従って前記貯蔵手段(16、26)の端子における電流及び電圧に向かわせるように適合させるための可逆的増幅アンジュレータ(15、25)と、を有する、
ことを特徴とする請求項7に記載の電気動力発生装置。
【請求項9】
前記質量部分(23)の運動は回転であり、前記アクチュエータ(21−22)は回転する、
ことを特徴とする請求項6に記載の電気動力発生装置。
【請求項10】
前記サーボ制御手段は、前記第1部材の最大角速度より大きい公称速度のあたりに前記質量部分(22、23)の運動速度を変更することができる、
ことを特徴とする請求項9に記載の電気動力発生装置。
【請求項11】
前記第1部材(21)から前記アクチュエータ(21−22)を支持するハウジング(20)を回転可能に分離するための手段を有する、
ことを特徴とする請求項10に記載の電気動力発生装置。
【請求項12】
前記アクチュエータがモータとして作動するときに前記質量部分(13、23)を加速させるように前記アクチュエータを補助するための、前記アクチュエータ(11−12、21−22)を支持するハウジング(10、20)に固定される弾性手段(17、27)を有する、
ことを特徴とする請求項6に記載の電気動力発生装置。
【請求項13】
移動式の質量部分(13、23)は、取り外し可能な方法で前記貯蔵装置(16、26)に接続された移動式の端末の少なくとも一部を含む、
ことを特徴とする請求項6に記載の電気動力発生装置。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公表番号】特表2011−521608(P2011−521608A)
【公表日】平成23年7月21日(2011.7.21)
【国際特許分類】
【出願番号】特願2011−505571(P2011−505571)
【出願日】平成21年4月17日(2009.4.17)
【国際出願番号】PCT/FR2009/050722
【国際公開番号】WO2009/138645
【国際公開日】平成21年11月19日(2009.11.19)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.ウオークマン
【出願人】(591034154)フランス・テレコム (290)
【Fターム(参考)】
【公表日】平成23年7月21日(2011.7.21)
【国際特許分類】
【出願日】平成21年4月17日(2009.4.17)
【国際出願番号】PCT/FR2009/050722
【国際公開番号】WO2009/138645
【国際公開日】平成21年11月19日(2009.11.19)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.ウオークマン
【出願人】(591034154)フランス・テレコム (290)
【Fターム(参考)】
[ Back to top ]