
電気機械の健全性を監視するためのシステム及び方法

【課題】電気機械の健全性を監視するためのシステムを提供する。
【解決手段】本システムは、固定子コア内に配置された少なくとも1つの基板要素32に埋設された少なくとも1つのセンサ要素34を含む。更に、少なくとも1つのセンサ要素34に接続された、基板要素32に作用する力又は基板要素32の加圧力の変化によるセンサ要素34の電磁特性の変化に基づいて健全性を監視するように構成された測定サブシステム36を含む。
【解決手段】本システムは、固定子コア内に配置された少なくとも1つの基板要素32に埋設された少なくとも1つのセンサ要素34を含む。更に、少なくとも1つのセンサ要素34に接続された、基板要素32に作用する力又は基板要素32の加圧力の変化によるセンサ要素34の電磁特性の変化に基づいて健全性を監視するように構成された測定サブシステム36を含む。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は概して、電気機械に関し、特に電気機械の健全性を監視するためのシステム及び方法に関する。
【背景技術】
【0002】
一般に、発電機又はモータ等の電気機械は、適切なメンテナンスを行い、運転時に高い効率を得るために、定期的に監視される。電気機械の健全性を監視するための数少ない態様の1つは、運転時に巻線が移動しないように、固定子バー巻線を監視することである。通常、電気機械は、固定子に対して半径方向の保持力を生じさせ、固定子スロット内での固定子バー巻線の移動を抑制するための楔装置を含む。このような楔装置は更に、固定子巻線アセンブリ内に埋設されたリップルばねを含むことがある。リップルばねは、巻線を移動させないようにするために、通常は加圧状態にある。しかし、楔装置が緩むと、保持力が減少して、固定子バー巻線が運転時に移動することがある。時間が経つにつれて、固定子バー巻線の相対移動によって、固定子バーの楔を取り巻く絶縁体が損傷し、固定子バー巻線の潜在的な故障が生じることがある。その結果、地絡が生じることにより、機械の効率が低下する上、電気機械の平均的な故障間隔が短くなることがある。そこで、電気機械の健全性の監視を定期的に行い、固定子スロット内の固定子バー巻線の移動が所定の許容差を超えていないかを判定する。
【0003】
現在、固定子楔の締め付け等の電気機械の健全性の監視には、幾つかの方法及びシステムが用いられている。これらには、固定子楔巻線アセンブリに定常的又は瞬間的な物理的な力を加えて偏向を解析するもの、励磁信号を印加して振動応答を解析するもの、加圧されたリップルばねの形状を現場で測定して加圧状態を推測するもの、或いは、ばねの加圧状態と相関させることができる信号を生じる様々なセンサをリップルばねに沿って設置するものが含まれる。しかし、楔の締め付けを判定するための上記の方法では、発電機が運転状態ではない時のオフライン測定が必要であり、楔の緩みの兆候を予測することはできない。更に、これらの現行の方法は、個々の固定子楔アセンブリの締め付けを判定するにあたり、必要以上の労力又は時間のいずれかを費やす作業を要するか、或いは、リップルばねに近接するがリップルばねの一体部分ではないセンサの較正を要する。動作環境は、−20°C〜150°Cの持続温度に達することがあるので、この動作温度条件の全域にわたって安定性を維持できるセンサを設けることも必要である。また、監視に用いられることが多いセンサは経時変化し易く、長期的には不安定なことから、電気機械の健全性を正確に監視することができない。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】米国特許第7743675号
【発明の概要】
【発明が解決しようとする課題】
【0005】
よって、電気機械の状態を評価するために、健全性を容易且つ迅速に監視できる効率的な監視システムが必要である。
【課題を解決するための手段】
【0006】
一実施形態において、電気機械の健全性を監視するためのシステムを提供する。このシステムは、固定子コア内に配置された少なくとも1つの基板要素に埋設された、少なくとも1つのセンサ要素を含む。システムは更に、この少なくとも1つのセンサ要素に接続された、基板要素に作用する力又は基板要素の加圧力の変化によるセンサ要素の電磁特性の変化に基づいて健全性を監視するように構成された測定サブシステムを含む。
【0007】
一実施形態において、電気機械の固定子楔の締め付けを監視するためのシステムを提供する。このシステムは、固定子コアの固定子楔に近接配置される少なくとも1つの基板要素に埋設又は配設された、少なくとも1つのセンサ要素を含む。システムは更に、基板要素内において加圧状態を示す少なくとも1つのスイッチを含む。システムは更に、この少なくとも1つのセンサ要素に接続された、基板要素の加圧力の変化によるセンサ要素の電磁特性の変化に基づいて固定子楔の締め付けを監視するように構成された測定サブシステムを含む。
【0008】
一実施形態において、電気機械における固定子楔の締め付けを監視する方法を提供する。この方法は、固定子コア内に配置された少なくとも1つの基板要素に埋設又は配設された、少なくとも1つのセンサ要素を設けるステップを含む。この方法は更に、基板要素の加圧力の変化に対応するセンサ要素の電磁特性の変化に基づいて信号を生成するステップを含む。この方法は更に、これらの信号を解析することにより固定子楔の締め付けを判定するステップを含む。
【0009】
一実施形態において、電気機械の健全性を監視する方法を提供する。この方法は、固定子コア内に配置された少なくとも1つの基板要素に埋設又は配設された、少なくとも1つのセンサ要素を設けるステップを含む。この方法は更に、機械の運転時又は運転停止時に基板要素に作用する、時間変化する力の変化に対応するセンサ要素の電磁特性の変化に基づいて信号を生成するステップを含む。この方法は更に、これらの信号を解析することにより機械の健全性を判定するステップを含む。
【0010】
全図面を通じて同様の部品を同様の符号で示した添付図面を参照しながら、下記の詳細な説明を読むと、本発明のこれら及びその他の特徴、態様、利点の理解が深まるであろう。
【図面の簡単な説明】
【0011】
【図1】本発明の実施形態に従った固定子楔の構造を示す、電気機械の固定子の一部分の部分等角図である。
【図2】図1の電気機械内で用いる例示的なリップルばねに接続される測定システムの図である。
【図3】図1の電気機械内で用いる例示的な平板に接続される測定システムの図である。
【図4】本発明の実施形態に従ったリップルばねに対する等価回路の図である。
【図5】本発明の別の実施形態に従った2状態装置を有するリップルばねに対する等価回路の図である。
【図6】本発明の別の実施形態に従った複数の2状態装置とセンサ部品とを有するリップルばねに対する等価回路の図である。
【図7】本発明の別の実施形態に従った複数の2状態装置とセンサ部品とダイオードとを有するリップルばねに対する等価回路の図である。
【図8】本発明の別の実施形態に従った複数のリップルばねに関連する固定子楔の締め付けを判定するシステムの図である。
【図9】本発明の実施形態に従った電気機械の固定子楔の締め付けを監視するための例示的な方法のフローチャートである。
【図10】本発明の別の実施形態に従った電気機械の健全性を監視するための例示的な方法のフローチャートである。
【発明を実施するための形態】
【0012】
本発明の個々の実施形態を説明する際、冠詞「a」「an」「the」「said」は、その要素が1つ以上あることを示すことを意図している。「有する」「含む」「備える」という用語は、包括的であることを意図しており、列挙した要素以外にも追加の要素があり得ることを意図している。動作パラメータの例はいずれも、開示の実施形態以外のパラメータを排除するものではない。
【0013】
図1に、本発明の実施形態に従った固定子楔構造を有する電気機械の固定子コア10の一部分の部分等角図を示す。固定子コア10は複数の固定子歯12を含み、これらの固定子歯12は更に、固定子巻線16(固定子コイルともよばれる)を収容するように構成された固定子スロット14を含む。固定子巻線16は、平板15、シム18、及びリップルばね20として示される複数の基板要素と、固定子歯12の側壁内の対応する形状の溝24に係合する面取り縁部22を有する固定子楔21とにより、固定子スロット14内に保持される。このように、基板要素の非限定的な例には、平板、リップルばね、力−変位変換器、軸方向ばねや半径方向ばね等のばね、並びにベルビルワッシャが含まれる。一実施形態において、平板15は金属平板(導電性)を含む。別の実施形態において、平板は、非金属平板(非導電性)を含む。リップルばね20は、固定子楔21とシム18との間で加圧され、固定子巻線16を正位置に堅固に保持する力を生じる。一実施形態において、リップルばね20は、プラスチック積層板等であるがこれに限定されない非導電性材料により作製される。固定子コア10内で固定子巻線16が堅固に装着された状態を維持するために、固定子コア10は複数の側部リップルばね26も含む。
【0014】
時間が経つにつれて、リップルばね16又は側部リップルばね26が弾性を失うことで、固定子楔21が緩むことがある。これにより、固定子巻線16が振動し、その結果、固定子コア10が損傷し、最終的には電気機械が故障することがある。固定子楔構造の締め付けを監視するために、リップルばね20は、リップルばね20の加圧又は弛緩に伴って1つ以上の電磁特性を変化させる埋込センサ要素を含む。電磁特性の変化を示す信号は、測定サブシステムにより、リップルばねの電気インターフェース、例えばシングルポート電気インターフェースから得られ、これによって、更に信号解析が行われた後、楔の締め付けの判定が行われる。このように、測定サブシステムは、リップルばね20が受ける静的加圧力を効率的に測定する。一実施形態において、側部リップルばねもまた、固定子楔構造の締め付けを測定するセンサ要素を含む。別の実施形態において、センサ要素はリップルばね20に配設される。
【0015】
また、一実施形態において、固定子巻線16間に配置された平板15が、埋込センサを含む。別の実施形態において、測定サブシステムに接続されたセンサが平板15に配設される。埋込センサは、電気機械の運転時又は運転停止時に平板15に作用する、時間変化する力を測定する測定サブシステムに接続される。平板15は磁場の変動により時間変化する力を受けるが、この時間変化する力は更に、センサデータを較正するために効率的に用いられる。その結果、電気機械の健全性を監視するための正確な検出と計測誤差情報の取得が可能になる。また別の実施形態では、運転時又は運転停止時に電気機械の健全性を測定するために、少なくとも2つのセンサが複数の基板要素に埋設又は配設される。
【0016】
図2に、電気機械(図1に示す)の固定子楔の締め付けを測定するために、例示的なリップルばね32に接続された測定システム30を示す。等角図に示すように、一実施形態では、リップルばね32(図1の20に示す)は、このリップルばね32内に埋設された少なくとも1つのセンサ要素34を含む。センサ要素34の非限定的な例には、誘電体、導電体、抵抗器、キャパシタ、インダクタ、半導体、光センサ、圧電センサ、圧力センサ、又は歪みセンサが含まれる。また、測定システム30は、測定サブシステム36を含む。この実施例において、測定サブシステム36は、リップルばね32のセンサ要素34に遠隔接続された送信器38と受信器40とを含む。これにより、送信器38及び受信器40は、無線通信モードを有する。別の実施例において、測定システム30は、1ポート電気インターフェース58(図4に示す)を介してリップルばね32のセンサ要素34に、物理的に直接連通する。測定システム30は更に、測定サブシステム36から情報を受け取り、センサ要素34から受け取ったデータを解析するように構成されたコンピュータ44を含む。別の実施形態において、測定サブシステム36は、測定サブシステム36とセンサ要素34とに電力を供給するように構成された電源42を含む。本明細書で用いる場合、コンピュータという用語は、当該技術分野においてコンピュータとよばれる集積回路のみに限定されず、広くコンピュータ、プロセッサ、マイクロコントローラ、マイクロコンピュータ、プログラマブルロジックコントローラ、特定用途向けIC、及びその他のプログラマブル回路を指す。
【0017】
また、図示の実施例において、リップルばね32は約2〜4ミリメートルの非加圧時の高さhと約2〜4センチメートルの波の周期とを有する。なお、リップルばねの長さL及び幅dは、固定子スロット(図1にスロット14として示す)の大きさに応じて可変的に選択される。別の実施形態において、リップルばね32は、上部層、中間部層、及び反対側に配置された底部層から成る多層状である。センサ要素34は、一実施形態において、中間部の表面に接合される。
【0018】
各々のセンサ要素34は、リップルばね32の加圧に伴って1つ以上の電磁特性を連続的に変化させ、これによって、電気機械の固定子楔の締め付けを連続的に測定できる。動作時、測定サブシステム36が電源42からエネルギーを供給され、エネルギーがセンサ要素34に伝達される。測定サブシステム36は、受信器38がセンサ要素34から信号を受け取るように構成される。この実施例において、センサ要素34は、固定子スロット内の機械的状態の変化に対応する電流の変化を示す。こうした電流の変化は、センサ要素34の電気インピーダンスに比例する。受信器40は、リップルばね32に埋設されたセンサ要素34の電気インピーダンスを測定するように構成される。電気インピーダンスの変化は、巻線の締め付けの程度を示す。一実施形態において、電気インピーダンスとリップルばね32の厚さ又は弛緩の測定値とを関連させる伝達関数を用いて、電気機械の巻線の締め付けを判定する。巻線の締め付けに関する所定値から少しでも逸脱した場合は、故障信号を発するようにしてもよい。なお、センサ要素34は、固定子スロット(図1にスロット14として示す)内の温度を示すリップルばね32の熱的特性及び固定子スロット内の部分放電を示すリップルばね32の無線周波特性を含む、固定子巻線の複数の態様を示すプロファイルを提供することもできる。
【0019】
図3に、固定子巻線に加わる時間変化する力を測定するための、図1の電気機械内で用いる例示的な金属板47に接続された測定システム46を示す。なお、この時間変化する力は、電気機械に対する負荷の関数である。したがって、電気機械の運転時に、時間変化する力を測定することにより、電気機械の健全性を監視するための電気機械への負荷の解析、更には計測誤差情報の取得が可能になる。等角図に示すように、一実施形態において、金属板47(図1に15として示す)は、この金属板47に埋設された少なくとも1つのセンサ要素48を含む。センサ要素48の非限定的な例には、誘電体、導電体、抵抗器、キャパシタ、インダクタ、半導体、光センサ、圧電センサ、圧力センサ、歪みセンサ、又は負荷センサが含まれる。更に、測定システム46は測定サブシステム49を含む。この実施例において、測定サブシステム49は、金属板47のセンサ要素48に遠隔接続された送信器50と受信器51とを含む。これにより、送信器50及び受信器51は、無線通信モードを有する。別の実施例において、測定システム46は、1ポート電気インターフェースを介して金属板47のセンサ要素48に、物理的に直接連通している。測定システム46はまた、測定サブシステム49から情報を受け取り、センサ要素48から受け取ったデータを解析するように構成されたコンピュータ54を含む。別の実施形態において、測定サブシステム49は、測定サブシステム49とセンサ要素48とに電力を供給するように構成された電源52を含む。有利なことに、金属板47に作用する時間変化する力信号を測定することにより電気機械への負荷を解析することで、センサ要素48を較正できる。センサが経時変化すると信号の検出が不正確になるので、センサ要素の較正は重要である。このように、センサ要素を較正することにより、固有の環境で動作する電気機械において安定したセンサを用いることができる。
【0020】
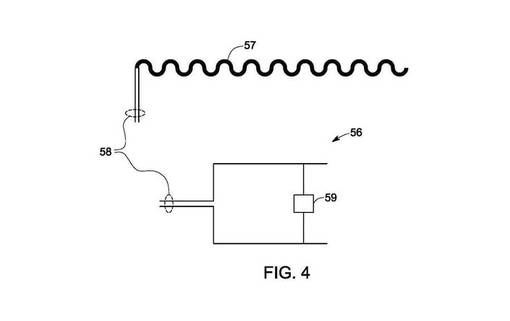
図4に、本発明の実施例に従ったリップルばね57に対する等価回路56を示す。回路56の部品59は、リップルばね57に埋設されたセンサ要素を表す。回路56において、部品59が、シングルポート電気インターフェース58にわたって配置され、このシングルポート電気インターフェースを介して検出情報が測定サブシステム30(図2に示す)に連続的に送信される。検出される情報の非限定的な例には、抵抗、コンダクタンス、透磁率、又は誘磁率が含まれる。測定サブシステムは、検出される情報を解析した上でリップルばね57の加圧力を判定することにより、電気機械の固定子楔の締め付けを判定する。
【0021】
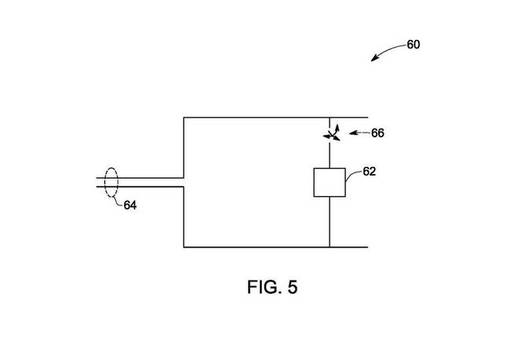
別の実施形態において、リップルばねに対する等価回路60を図5に示す。この実施形態において、リップルばねは、等価回路60内に部品66として示す機械的スイッチ等の2状態装置を含む。一実施形態において、機械的スイッチ66は、リップルばねの波の高さh(図2に示す)が波の高さの閾値以上になると閉じる。閾値未満の場合、機械的スイッチ66は開状態となる。図示のように、機械的スイッチ66は、等価回路60内のセンサ部品62と直列接続されている。一実施形態において、センサ部品62は、シングルポート電気インターフェース64にわたって配置された、固定パラメータ1ポート電気装置である。センサ部品62の非限定的な例には、抵抗器、キャパシタ、又はインダクタが含まれる。機械的スイッチ66とセンサ部品62との両方がリップルばねに埋設され、シングルポート電気インターフェース64にわたって互いに直列に接続され、シングルポート電気インターフェース64によって、図2の測定サブシステム30への外部接続が行われる。これにより、本実施形態では、電磁特性の離散的測定を行い、リップルばねの波の高さh(図2に示す)が電気機械の固定子楔の締め付けを示す閾値又は最適値よりも大であるか小であるかを評価できる。
【0022】
図6は、複数の2状態装置(スイッチともよばれる)1101、1102、及び110Nとセンサ要素1201、1202、及び120Nとを有する等価回路100を示す、本発明の一実施例である。なお、回路100内には「N」で示す任意の個数のスイッチ又はセンサ要素が存在してもよく、図6に示すスイッチ又はセンサ要素の個数に限定されることはない。一実施形態において、等価回路100は、リップルばねに埋設された少なくとも1つのセンサ要素1201に直列に接続された、少なくとも1つのスイッチ1101のアセンブリを含む。図示の別の実施形態では、等価回路100は、シングルポート電気インターフェース102にわたって、複数のアセンブリを並列に配置したものを含む。スイッチ110K(図示せず)は、波の高さh(図2に示す)が閾値130Kを超えると、スイッチ110Kが状態を変化させるように設定される。図示のように、この構成の2状態装置(スイッチ1101、1102、及び110N)とセンサ要素(1201、1202、及び120N)とにより、1ポート電気インターフェース102を介した実質的な電気測定が可能になる。センサ要素1201、1202、及び120Nは、「N」個のスイッチにより選択される任意の電気的に並列のセンサ要素の組合せによって、固有の値を判定し、「N」個のスイッチの状態を示すように選択される。これにより、本実施形態では、1ポート電気インターフェース102を介した電磁特性の離散的測定を行い、「N」個のスイッチの状態によって特定される加圧力の範囲内のリップルばねの波の高さh(図2に示す)を推定できる。
【0023】
図7は、シングルポート電気インターフェース202を介して図2に示す測定サブシステム30に接続された等価回路200を示す、本発明の別の実施例である。一実施形態において、等価回路200は、リップルばねに埋設された部品220として示されるセンサ要素とスイッチ230とに直列に接続された、ダイオード210のアセンブリを含む。ダイオード210により、回路200内を電流が一方向に流れ、2倍の個数の閾値のインスタンス化が行われる。有利なことに、これにより、スイッチの状態から特定される閾値間のより狭い範囲を解析することによって、リップルばねの加圧力を正確に評価できる。図示のように、等価回路200は、シングルポート電気インターフェース202にわたってダイオード(210、240)とセンサ部品(220、250)とスイッチ(230、260)とを有する複数のアセンブリを並列に配置したものを含む。なお、任意の個数のダイオード、スイッチ、又はセンサ要素が存在してもよく、図7に示すスイッチ又はセンサ部品の個数に限定されない。複数のダイオード(210、240)、センサ部品(220、250)、及びスイッチ(230、260)を並列に配置すると、リップルばねの波の高さh(図2に示す)を正確に測定及び判定できる。上述のように、リップルばねの加圧力の評価精度が高まるのは、図6の実施形態に比べて2倍の個数の閾値をインスタンス化できるからである。この実施例の結果を加圧力と波の高さとの関係を示すグラフで表すと、ダイオード210及び240が電流を異なる方向に流すことにより、加圧波高曲線が4つの加圧力領域に分割されることがわかる。
【0024】
図8は、電気機械の固定子楔の締め付けを判定するシステム300を示す、本発明の一実施形態である。システム300は、固定子内において複数の固定子楔に配置される「M」個の複数のリップルばね(3201、3202、320M)を含む。各リップルばね(3201、3202、320M)の1ポート電気インターフェースはモジュール310に接続されるが、このモジュール310は、それぞれの1ポート電気インターフェースを介して「M」個の各リップルばねに関する電気的測定を順次又は同時に行う装置である。こうして、有利なことに、本実施形態では「M」個のリップルばねの加圧検査と、電気機械内に配置される各リップルばねに関する固定子楔の締め付けの評価とを、集中的且つ効率的に行うことができる。
【0025】
図9は、図1に示す電気機械の固定子楔の締め付けを監視する例示的な方法400のフローチャートである。ステップ402において、この方法は、少なくとも1つのセンサ要素が埋設され、固定子コアの固定子楔に近接配置されるリップルばねを設けるステップを含む。更にステップ404において、この方法は、リップルばねの加圧力の変化に対応するセンサ要素の電磁特性の変化に基づいて信号を生成するステップを含む。最後にステップ406において、この方法は、これらの信号を解析することにより固定子楔の締め付けを監視するステップを含む。これは、少なくとも1つのセンサ要素に接続された測定サブシステムを用いることによって可能であり、この測定サブシステムは、リップルばねの加圧範囲を解析及び評価することにより固定子楔の締め付けを判定するコンピュータを含む。
【0026】
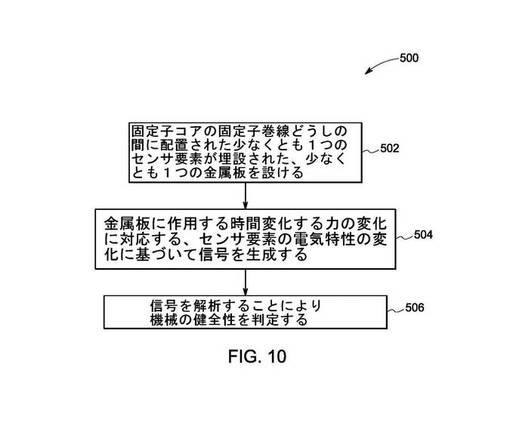
図10は、図1に示す電気機械の健全性を監視するための例示的な方法500のフローチャートである。ステップ502において、この方法は、固定子コアの固定子巻線間に配置された少なくとも1つの金属板に埋設される少なくとも1つのセンサ要素を設けるステップを含む。更にステップ504において、この方法は、機械の運転時に金属板に作用する、時間変化する力の変化に対応したセンサ要素の電磁特性の変化に基づいて信号を生成するステップを含む。一実施形態において、この方法は更に、発生させた信号を用いてセンサ要素を較正するステップを含む。最後にステップ506において、この方法は、これらの信号を解析することにより機械の健全性を判定するステップを含む。これは、少なくとも1つのセンサ要素に接続された測定サブシステムを用いることによって可能であり、この測定サブシステムは、金属板に作用する時間変化する力を解析及び評価することにより電気機械の健全性を監視するコンピュータを含む。
【0027】
有利なことに、一実施形態に従った本発明の方法及びシステムでは、時間変化する力を測定する技術とセンサ較正技術とを用いることにより、電気機械の健全性を効率的に監視でき、結果的に機械の状態を正確に検出できる。また、本発明では、リップルばねの加圧範囲を正確に評価することにより、固定子楔の締め付けを判定することもできる。加えて、別の実施形態において、ダイオードとスイッチとを用いることにより、リップルばねの加圧状態を的確に測定できる。その後、オペレータにより、この情報を有効利用して、楔を締める必要があるか否かを判定すること、又は将来的に楔を締めることが必要になる時期を推定できる。このように、本発明により、電気機械の運転時に楔の緩みの発生を予測すること及び楔の締め付けを判定することができる。ここで提案する電気インピーダンス測定は、最小限の電気部品を必要とするだけの、比較的測定が容易なものなので、低コストのシステムである。センサを、固定子部品を正位置に保持するリップルばねに一体化してもよい。また、電子機器を同様にリップルばねに一体化させてもよいが、電子機器を電気機械外部のヒューマンインターフェースに設置して、測定及び診断システムに柔軟性を与えてもよい。また、固定子楔の締め付けを監視する本方法及びシステムは、発電機、モータ、及びブロードバンド発生器等の、様々な電気機械以外にも適用可能である。
【0028】
上記のこうした利点は、必ずしもいずれかの特定の実施例によって達成されるわけではないことを、理解されたい。したがって、例えば、当業者には明らかなように、ここで説明したシステム及び方法は、ここで教示した1つの利点又は利点を組み合わせたものを達成すること又は最大限に利用することで、ここに教示又は示唆されたその他の目的又は利点を達成しなくても、実施又は実行可能である。
【0029】
ここでは、本発明の幾つかの特徴のみを図示及び記述したが、当業者には多くの修正及び改変が想到されよう。したがって、添付の特許請求の範囲は、こうした修正及び改変も全て、本発明の概念に含まれるものとして網羅することを意図していると理解されたい。
【技術分野】
【0001】
本発明は概して、電気機械に関し、特に電気機械の健全性を監視するためのシステム及び方法に関する。
【背景技術】
【0002】
一般に、発電機又はモータ等の電気機械は、適切なメンテナンスを行い、運転時に高い効率を得るために、定期的に監視される。電気機械の健全性を監視するための数少ない態様の1つは、運転時に巻線が移動しないように、固定子バー巻線を監視することである。通常、電気機械は、固定子に対して半径方向の保持力を生じさせ、固定子スロット内での固定子バー巻線の移動を抑制するための楔装置を含む。このような楔装置は更に、固定子巻線アセンブリ内に埋設されたリップルばねを含むことがある。リップルばねは、巻線を移動させないようにするために、通常は加圧状態にある。しかし、楔装置が緩むと、保持力が減少して、固定子バー巻線が運転時に移動することがある。時間が経つにつれて、固定子バー巻線の相対移動によって、固定子バーの楔を取り巻く絶縁体が損傷し、固定子バー巻線の潜在的な故障が生じることがある。その結果、地絡が生じることにより、機械の効率が低下する上、電気機械の平均的な故障間隔が短くなることがある。そこで、電気機械の健全性の監視を定期的に行い、固定子スロット内の固定子バー巻線の移動が所定の許容差を超えていないかを判定する。
【0003】
現在、固定子楔の締め付け等の電気機械の健全性の監視には、幾つかの方法及びシステムが用いられている。これらには、固定子楔巻線アセンブリに定常的又は瞬間的な物理的な力を加えて偏向を解析するもの、励磁信号を印加して振動応答を解析するもの、加圧されたリップルばねの形状を現場で測定して加圧状態を推測するもの、或いは、ばねの加圧状態と相関させることができる信号を生じる様々なセンサをリップルばねに沿って設置するものが含まれる。しかし、楔の締め付けを判定するための上記の方法では、発電機が運転状態ではない時のオフライン測定が必要であり、楔の緩みの兆候を予測することはできない。更に、これらの現行の方法は、個々の固定子楔アセンブリの締め付けを判定するにあたり、必要以上の労力又は時間のいずれかを費やす作業を要するか、或いは、リップルばねに近接するがリップルばねの一体部分ではないセンサの較正を要する。動作環境は、−20°C〜150°Cの持続温度に達することがあるので、この動作温度条件の全域にわたって安定性を維持できるセンサを設けることも必要である。また、監視に用いられることが多いセンサは経時変化し易く、長期的には不安定なことから、電気機械の健全性を正確に監視することができない。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】米国特許第7743675号
【発明の概要】
【発明が解決しようとする課題】
【0005】
よって、電気機械の状態を評価するために、健全性を容易且つ迅速に監視できる効率的な監視システムが必要である。
【課題を解決するための手段】
【0006】
一実施形態において、電気機械の健全性を監視するためのシステムを提供する。このシステムは、固定子コア内に配置された少なくとも1つの基板要素に埋設された、少なくとも1つのセンサ要素を含む。システムは更に、この少なくとも1つのセンサ要素に接続された、基板要素に作用する力又は基板要素の加圧力の変化によるセンサ要素の電磁特性の変化に基づいて健全性を監視するように構成された測定サブシステムを含む。
【0007】
一実施形態において、電気機械の固定子楔の締め付けを監視するためのシステムを提供する。このシステムは、固定子コアの固定子楔に近接配置される少なくとも1つの基板要素に埋設又は配設された、少なくとも1つのセンサ要素を含む。システムは更に、基板要素内において加圧状態を示す少なくとも1つのスイッチを含む。システムは更に、この少なくとも1つのセンサ要素に接続された、基板要素の加圧力の変化によるセンサ要素の電磁特性の変化に基づいて固定子楔の締め付けを監視するように構成された測定サブシステムを含む。
【0008】
一実施形態において、電気機械における固定子楔の締め付けを監視する方法を提供する。この方法は、固定子コア内に配置された少なくとも1つの基板要素に埋設又は配設された、少なくとも1つのセンサ要素を設けるステップを含む。この方法は更に、基板要素の加圧力の変化に対応するセンサ要素の電磁特性の変化に基づいて信号を生成するステップを含む。この方法は更に、これらの信号を解析することにより固定子楔の締め付けを判定するステップを含む。
【0009】
一実施形態において、電気機械の健全性を監視する方法を提供する。この方法は、固定子コア内に配置された少なくとも1つの基板要素に埋設又は配設された、少なくとも1つのセンサ要素を設けるステップを含む。この方法は更に、機械の運転時又は運転停止時に基板要素に作用する、時間変化する力の変化に対応するセンサ要素の電磁特性の変化に基づいて信号を生成するステップを含む。この方法は更に、これらの信号を解析することにより機械の健全性を判定するステップを含む。
【0010】
全図面を通じて同様の部品を同様の符号で示した添付図面を参照しながら、下記の詳細な説明を読むと、本発明のこれら及びその他の特徴、態様、利点の理解が深まるであろう。
【図面の簡単な説明】
【0011】
【図1】本発明の実施形態に従った固定子楔の構造を示す、電気機械の固定子の一部分の部分等角図である。
【図2】図1の電気機械内で用いる例示的なリップルばねに接続される測定システムの図である。
【図3】図1の電気機械内で用いる例示的な平板に接続される測定システムの図である。
【図4】本発明の実施形態に従ったリップルばねに対する等価回路の図である。
【図5】本発明の別の実施形態に従った2状態装置を有するリップルばねに対する等価回路の図である。
【図6】本発明の別の実施形態に従った複数の2状態装置とセンサ部品とを有するリップルばねに対する等価回路の図である。
【図7】本発明の別の実施形態に従った複数の2状態装置とセンサ部品とダイオードとを有するリップルばねに対する等価回路の図である。
【図8】本発明の別の実施形態に従った複数のリップルばねに関連する固定子楔の締め付けを判定するシステムの図である。
【図9】本発明の実施形態に従った電気機械の固定子楔の締め付けを監視するための例示的な方法のフローチャートである。
【図10】本発明の別の実施形態に従った電気機械の健全性を監視するための例示的な方法のフローチャートである。
【発明を実施するための形態】
【0012】
本発明の個々の実施形態を説明する際、冠詞「a」「an」「the」「said」は、その要素が1つ以上あることを示すことを意図している。「有する」「含む」「備える」という用語は、包括的であることを意図しており、列挙した要素以外にも追加の要素があり得ることを意図している。動作パラメータの例はいずれも、開示の実施形態以外のパラメータを排除するものではない。
【0013】
図1に、本発明の実施形態に従った固定子楔構造を有する電気機械の固定子コア10の一部分の部分等角図を示す。固定子コア10は複数の固定子歯12を含み、これらの固定子歯12は更に、固定子巻線16(固定子コイルともよばれる)を収容するように構成された固定子スロット14を含む。固定子巻線16は、平板15、シム18、及びリップルばね20として示される複数の基板要素と、固定子歯12の側壁内の対応する形状の溝24に係合する面取り縁部22を有する固定子楔21とにより、固定子スロット14内に保持される。このように、基板要素の非限定的な例には、平板、リップルばね、力−変位変換器、軸方向ばねや半径方向ばね等のばね、並びにベルビルワッシャが含まれる。一実施形態において、平板15は金属平板(導電性)を含む。別の実施形態において、平板は、非金属平板(非導電性)を含む。リップルばね20は、固定子楔21とシム18との間で加圧され、固定子巻線16を正位置に堅固に保持する力を生じる。一実施形態において、リップルばね20は、プラスチック積層板等であるがこれに限定されない非導電性材料により作製される。固定子コア10内で固定子巻線16が堅固に装着された状態を維持するために、固定子コア10は複数の側部リップルばね26も含む。
【0014】
時間が経つにつれて、リップルばね16又は側部リップルばね26が弾性を失うことで、固定子楔21が緩むことがある。これにより、固定子巻線16が振動し、その結果、固定子コア10が損傷し、最終的には電気機械が故障することがある。固定子楔構造の締め付けを監視するために、リップルばね20は、リップルばね20の加圧又は弛緩に伴って1つ以上の電磁特性を変化させる埋込センサ要素を含む。電磁特性の変化を示す信号は、測定サブシステムにより、リップルばねの電気インターフェース、例えばシングルポート電気インターフェースから得られ、これによって、更に信号解析が行われた後、楔の締め付けの判定が行われる。このように、測定サブシステムは、リップルばね20が受ける静的加圧力を効率的に測定する。一実施形態において、側部リップルばねもまた、固定子楔構造の締め付けを測定するセンサ要素を含む。別の実施形態において、センサ要素はリップルばね20に配設される。
【0015】
また、一実施形態において、固定子巻線16間に配置された平板15が、埋込センサを含む。別の実施形態において、測定サブシステムに接続されたセンサが平板15に配設される。埋込センサは、電気機械の運転時又は運転停止時に平板15に作用する、時間変化する力を測定する測定サブシステムに接続される。平板15は磁場の変動により時間変化する力を受けるが、この時間変化する力は更に、センサデータを較正するために効率的に用いられる。その結果、電気機械の健全性を監視するための正確な検出と計測誤差情報の取得が可能になる。また別の実施形態では、運転時又は運転停止時に電気機械の健全性を測定するために、少なくとも2つのセンサが複数の基板要素に埋設又は配設される。
【0016】
図2に、電気機械(図1に示す)の固定子楔の締め付けを測定するために、例示的なリップルばね32に接続された測定システム30を示す。等角図に示すように、一実施形態では、リップルばね32(図1の20に示す)は、このリップルばね32内に埋設された少なくとも1つのセンサ要素34を含む。センサ要素34の非限定的な例には、誘電体、導電体、抵抗器、キャパシタ、インダクタ、半導体、光センサ、圧電センサ、圧力センサ、又は歪みセンサが含まれる。また、測定システム30は、測定サブシステム36を含む。この実施例において、測定サブシステム36は、リップルばね32のセンサ要素34に遠隔接続された送信器38と受信器40とを含む。これにより、送信器38及び受信器40は、無線通信モードを有する。別の実施例において、測定システム30は、1ポート電気インターフェース58(図4に示す)を介してリップルばね32のセンサ要素34に、物理的に直接連通する。測定システム30は更に、測定サブシステム36から情報を受け取り、センサ要素34から受け取ったデータを解析するように構成されたコンピュータ44を含む。別の実施形態において、測定サブシステム36は、測定サブシステム36とセンサ要素34とに電力を供給するように構成された電源42を含む。本明細書で用いる場合、コンピュータという用語は、当該技術分野においてコンピュータとよばれる集積回路のみに限定されず、広くコンピュータ、プロセッサ、マイクロコントローラ、マイクロコンピュータ、プログラマブルロジックコントローラ、特定用途向けIC、及びその他のプログラマブル回路を指す。
【0017】
また、図示の実施例において、リップルばね32は約2〜4ミリメートルの非加圧時の高さhと約2〜4センチメートルの波の周期とを有する。なお、リップルばねの長さL及び幅dは、固定子スロット(図1にスロット14として示す)の大きさに応じて可変的に選択される。別の実施形態において、リップルばね32は、上部層、中間部層、及び反対側に配置された底部層から成る多層状である。センサ要素34は、一実施形態において、中間部の表面に接合される。
【0018】
各々のセンサ要素34は、リップルばね32の加圧に伴って1つ以上の電磁特性を連続的に変化させ、これによって、電気機械の固定子楔の締め付けを連続的に測定できる。動作時、測定サブシステム36が電源42からエネルギーを供給され、エネルギーがセンサ要素34に伝達される。測定サブシステム36は、受信器38がセンサ要素34から信号を受け取るように構成される。この実施例において、センサ要素34は、固定子スロット内の機械的状態の変化に対応する電流の変化を示す。こうした電流の変化は、センサ要素34の電気インピーダンスに比例する。受信器40は、リップルばね32に埋設されたセンサ要素34の電気インピーダンスを測定するように構成される。電気インピーダンスの変化は、巻線の締め付けの程度を示す。一実施形態において、電気インピーダンスとリップルばね32の厚さ又は弛緩の測定値とを関連させる伝達関数を用いて、電気機械の巻線の締め付けを判定する。巻線の締め付けに関する所定値から少しでも逸脱した場合は、故障信号を発するようにしてもよい。なお、センサ要素34は、固定子スロット(図1にスロット14として示す)内の温度を示すリップルばね32の熱的特性及び固定子スロット内の部分放電を示すリップルばね32の無線周波特性を含む、固定子巻線の複数の態様を示すプロファイルを提供することもできる。
【0019】
図3に、固定子巻線に加わる時間変化する力を測定するための、図1の電気機械内で用いる例示的な金属板47に接続された測定システム46を示す。なお、この時間変化する力は、電気機械に対する負荷の関数である。したがって、電気機械の運転時に、時間変化する力を測定することにより、電気機械の健全性を監視するための電気機械への負荷の解析、更には計測誤差情報の取得が可能になる。等角図に示すように、一実施形態において、金属板47(図1に15として示す)は、この金属板47に埋設された少なくとも1つのセンサ要素48を含む。センサ要素48の非限定的な例には、誘電体、導電体、抵抗器、キャパシタ、インダクタ、半導体、光センサ、圧電センサ、圧力センサ、歪みセンサ、又は負荷センサが含まれる。更に、測定システム46は測定サブシステム49を含む。この実施例において、測定サブシステム49は、金属板47のセンサ要素48に遠隔接続された送信器50と受信器51とを含む。これにより、送信器50及び受信器51は、無線通信モードを有する。別の実施例において、測定システム46は、1ポート電気インターフェースを介して金属板47のセンサ要素48に、物理的に直接連通している。測定システム46はまた、測定サブシステム49から情報を受け取り、センサ要素48から受け取ったデータを解析するように構成されたコンピュータ54を含む。別の実施形態において、測定サブシステム49は、測定サブシステム49とセンサ要素48とに電力を供給するように構成された電源52を含む。有利なことに、金属板47に作用する時間変化する力信号を測定することにより電気機械への負荷を解析することで、センサ要素48を較正できる。センサが経時変化すると信号の検出が不正確になるので、センサ要素の較正は重要である。このように、センサ要素を較正することにより、固有の環境で動作する電気機械において安定したセンサを用いることができる。
【0020】
図4に、本発明の実施例に従ったリップルばね57に対する等価回路56を示す。回路56の部品59は、リップルばね57に埋設されたセンサ要素を表す。回路56において、部品59が、シングルポート電気インターフェース58にわたって配置され、このシングルポート電気インターフェースを介して検出情報が測定サブシステム30(図2に示す)に連続的に送信される。検出される情報の非限定的な例には、抵抗、コンダクタンス、透磁率、又は誘磁率が含まれる。測定サブシステムは、検出される情報を解析した上でリップルばね57の加圧力を判定することにより、電気機械の固定子楔の締め付けを判定する。
【0021】
別の実施形態において、リップルばねに対する等価回路60を図5に示す。この実施形態において、リップルばねは、等価回路60内に部品66として示す機械的スイッチ等の2状態装置を含む。一実施形態において、機械的スイッチ66は、リップルばねの波の高さh(図2に示す)が波の高さの閾値以上になると閉じる。閾値未満の場合、機械的スイッチ66は開状態となる。図示のように、機械的スイッチ66は、等価回路60内のセンサ部品62と直列接続されている。一実施形態において、センサ部品62は、シングルポート電気インターフェース64にわたって配置された、固定パラメータ1ポート電気装置である。センサ部品62の非限定的な例には、抵抗器、キャパシタ、又はインダクタが含まれる。機械的スイッチ66とセンサ部品62との両方がリップルばねに埋設され、シングルポート電気インターフェース64にわたって互いに直列に接続され、シングルポート電気インターフェース64によって、図2の測定サブシステム30への外部接続が行われる。これにより、本実施形態では、電磁特性の離散的測定を行い、リップルばねの波の高さh(図2に示す)が電気機械の固定子楔の締め付けを示す閾値又は最適値よりも大であるか小であるかを評価できる。
【0022】
図6は、複数の2状態装置(スイッチともよばれる)1101、1102、及び110Nとセンサ要素1201、1202、及び120Nとを有する等価回路100を示す、本発明の一実施例である。なお、回路100内には「N」で示す任意の個数のスイッチ又はセンサ要素が存在してもよく、図6に示すスイッチ又はセンサ要素の個数に限定されることはない。一実施形態において、等価回路100は、リップルばねに埋設された少なくとも1つのセンサ要素1201に直列に接続された、少なくとも1つのスイッチ1101のアセンブリを含む。図示の別の実施形態では、等価回路100は、シングルポート電気インターフェース102にわたって、複数のアセンブリを並列に配置したものを含む。スイッチ110K(図示せず)は、波の高さh(図2に示す)が閾値130Kを超えると、スイッチ110Kが状態を変化させるように設定される。図示のように、この構成の2状態装置(スイッチ1101、1102、及び110N)とセンサ要素(1201、1202、及び120N)とにより、1ポート電気インターフェース102を介した実質的な電気測定が可能になる。センサ要素1201、1202、及び120Nは、「N」個のスイッチにより選択される任意の電気的に並列のセンサ要素の組合せによって、固有の値を判定し、「N」個のスイッチの状態を示すように選択される。これにより、本実施形態では、1ポート電気インターフェース102を介した電磁特性の離散的測定を行い、「N」個のスイッチの状態によって特定される加圧力の範囲内のリップルばねの波の高さh(図2に示す)を推定できる。
【0023】
図7は、シングルポート電気インターフェース202を介して図2に示す測定サブシステム30に接続された等価回路200を示す、本発明の別の実施例である。一実施形態において、等価回路200は、リップルばねに埋設された部品220として示されるセンサ要素とスイッチ230とに直列に接続された、ダイオード210のアセンブリを含む。ダイオード210により、回路200内を電流が一方向に流れ、2倍の個数の閾値のインスタンス化が行われる。有利なことに、これにより、スイッチの状態から特定される閾値間のより狭い範囲を解析することによって、リップルばねの加圧力を正確に評価できる。図示のように、等価回路200は、シングルポート電気インターフェース202にわたってダイオード(210、240)とセンサ部品(220、250)とスイッチ(230、260)とを有する複数のアセンブリを並列に配置したものを含む。なお、任意の個数のダイオード、スイッチ、又はセンサ要素が存在してもよく、図7に示すスイッチ又はセンサ部品の個数に限定されない。複数のダイオード(210、240)、センサ部品(220、250)、及びスイッチ(230、260)を並列に配置すると、リップルばねの波の高さh(図2に示す)を正確に測定及び判定できる。上述のように、リップルばねの加圧力の評価精度が高まるのは、図6の実施形態に比べて2倍の個数の閾値をインスタンス化できるからである。この実施例の結果を加圧力と波の高さとの関係を示すグラフで表すと、ダイオード210及び240が電流を異なる方向に流すことにより、加圧波高曲線が4つの加圧力領域に分割されることがわかる。
【0024】
図8は、電気機械の固定子楔の締め付けを判定するシステム300を示す、本発明の一実施形態である。システム300は、固定子内において複数の固定子楔に配置される「M」個の複数のリップルばね(3201、3202、320M)を含む。各リップルばね(3201、3202、320M)の1ポート電気インターフェースはモジュール310に接続されるが、このモジュール310は、それぞれの1ポート電気インターフェースを介して「M」個の各リップルばねに関する電気的測定を順次又は同時に行う装置である。こうして、有利なことに、本実施形態では「M」個のリップルばねの加圧検査と、電気機械内に配置される各リップルばねに関する固定子楔の締め付けの評価とを、集中的且つ効率的に行うことができる。
【0025】
図9は、図1に示す電気機械の固定子楔の締め付けを監視する例示的な方法400のフローチャートである。ステップ402において、この方法は、少なくとも1つのセンサ要素が埋設され、固定子コアの固定子楔に近接配置されるリップルばねを設けるステップを含む。更にステップ404において、この方法は、リップルばねの加圧力の変化に対応するセンサ要素の電磁特性の変化に基づいて信号を生成するステップを含む。最後にステップ406において、この方法は、これらの信号を解析することにより固定子楔の締め付けを監視するステップを含む。これは、少なくとも1つのセンサ要素に接続された測定サブシステムを用いることによって可能であり、この測定サブシステムは、リップルばねの加圧範囲を解析及び評価することにより固定子楔の締め付けを判定するコンピュータを含む。
【0026】
図10は、図1に示す電気機械の健全性を監視するための例示的な方法500のフローチャートである。ステップ502において、この方法は、固定子コアの固定子巻線間に配置された少なくとも1つの金属板に埋設される少なくとも1つのセンサ要素を設けるステップを含む。更にステップ504において、この方法は、機械の運転時に金属板に作用する、時間変化する力の変化に対応したセンサ要素の電磁特性の変化に基づいて信号を生成するステップを含む。一実施形態において、この方法は更に、発生させた信号を用いてセンサ要素を較正するステップを含む。最後にステップ506において、この方法は、これらの信号を解析することにより機械の健全性を判定するステップを含む。これは、少なくとも1つのセンサ要素に接続された測定サブシステムを用いることによって可能であり、この測定サブシステムは、金属板に作用する時間変化する力を解析及び評価することにより電気機械の健全性を監視するコンピュータを含む。
【0027】
有利なことに、一実施形態に従った本発明の方法及びシステムでは、時間変化する力を測定する技術とセンサ較正技術とを用いることにより、電気機械の健全性を効率的に監視でき、結果的に機械の状態を正確に検出できる。また、本発明では、リップルばねの加圧範囲を正確に評価することにより、固定子楔の締め付けを判定することもできる。加えて、別の実施形態において、ダイオードとスイッチとを用いることにより、リップルばねの加圧状態を的確に測定できる。その後、オペレータにより、この情報を有効利用して、楔を締める必要があるか否かを判定すること、又は将来的に楔を締めることが必要になる時期を推定できる。このように、本発明により、電気機械の運転時に楔の緩みの発生を予測すること及び楔の締め付けを判定することができる。ここで提案する電気インピーダンス測定は、最小限の電気部品を必要とするだけの、比較的測定が容易なものなので、低コストのシステムである。センサを、固定子部品を正位置に保持するリップルばねに一体化してもよい。また、電子機器を同様にリップルばねに一体化させてもよいが、電子機器を電気機械外部のヒューマンインターフェースに設置して、測定及び診断システムに柔軟性を与えてもよい。また、固定子楔の締め付けを監視する本方法及びシステムは、発電機、モータ、及びブロードバンド発生器等の、様々な電気機械以外にも適用可能である。
【0028】
上記のこうした利点は、必ずしもいずれかの特定の実施例によって達成されるわけではないことを、理解されたい。したがって、例えば、当業者には明らかなように、ここで説明したシステム及び方法は、ここで教示した1つの利点又は利点を組み合わせたものを達成すること又は最大限に利用することで、ここに教示又は示唆されたその他の目的又は利点を達成しなくても、実施又は実行可能である。
【0029】
ここでは、本発明の幾つかの特徴のみを図示及び記述したが、当業者には多くの修正及び改変が想到されよう。したがって、添付の特許請求の範囲は、こうした修正及び改変も全て、本発明の概念に含まれるものとして網羅することを意図していると理解されたい。
【特許請求の範囲】
【請求項1】
電気機械の健全性を監視するためのシステムであって、
固定子コア(10)内に配置された少なくとも1つの基板要素に埋設又は設置される少なくとも1つのセンサ要素(34、48)と、
前記少なくとも1つのセンサ要素(34、48)に接続され、前記基板要素に作用する力又は前記基板要素の加圧力の変化による前記センサ要素(34、48)の電磁特性の変化に基づいて前記健全性を監視するように構成された測定サブシステム(36、49)と、を含むシステム。
【請求項2】
前記基板要素は、平板(15)とばねとリップルばね(20)と力−変位変換器とを含み、
前記基板要素は、前記固定子コア(10)の固定子巻線(16)どうしの間に配置され、
前記基板要素は、金属又は非金属の平板(15)から成る、請求項1に記載のシステム。
【請求項3】
前記基板要素に埋設又は配設された前記センサ要素(34、48)の前記電磁特性は、前記電気機械の運転時又は運転停止時に前記基板要素の加圧力又は前記基板要素に作用する時間変化する力に伴って変動する、請求項1に記載のシステム。
【請求項4】
前記電磁特性は、抵抗、歪み、コンダクタンス、透磁率、及び誘磁率を含む、請求項1に記載のシステム。
【請求項5】
電気機械の固定子楔の締め付けを監視するためのシステムであって、
固定子コア(10)の前記固定子楔(21)に近接配置される少なくとも1つの基板要素に埋設又は配設された少なくとも1つのセンサ要素(34、48)と、
前記基板要素の加圧の状態を示す少なくとも1つのスイッチ(66)と、
前記少なくとも1つのセンサ要素(34、48)に接続され、前記基板要素の加圧力の変化による前記センサ要素(34、48)の電磁特性の変化に基づいて前記固定子楔の締め付けを監視するように構成された測定サブシステム(36)と、を含むシステム。
【請求項6】
前記基板要素に埋設された前記少なくとも1つのセンサ要素(34、48)に直列に接続された、少なくとも1つのスイッチ(66)のアセンブリを含む、請求項5に記載のシステム。
【請求項7】
前記システムのシングルポート電気インターフェース(64)にわたって、複数の前記アセンブリを並列に配置したものを含む、請求項6に記載のシステム。
【請求項8】
電気等価回路(200)内で、前記基板要素の前記スイッチ(66、260)及び前記センサ要素(34、48)に直列に接続されたダイオード(210)のアセンブリを含む、請求項5に記載のシステム。
【請求項9】
前記固定子コア内で複数の固定子楔に近接配置された複数の基板要素を含むシステムであって、
前記基板要素は、前記シングルポート電気インターフェース(64)を介してモジュールに接続され、該モジュールは、前記シングルポート電気インターフェース(64)を介して前記基板要素において電気的測定を順次又は同時に行うように構成された装置である、請求項5に記載のシステム。
【請求項10】
電気機械における固定子楔の締め付けを監視する方法であって、
固定子コア内に配置された少なくとも1つの基板要素に埋設又は配設された、少なくとも1つのセンサ要素(34、48)を設けるステップと、
前記基板要素の加圧力の変化に対応する前記センサ要素の電磁特性の変化に基づいて信号を生成するステップと、
前記信号を解析した上で加圧範囲を監視及び推定することにより、前記固定子楔の締め付けを判定するステップと、を含む方法。
【請求項1】
電気機械の健全性を監視するためのシステムであって、
固定子コア(10)内に配置された少なくとも1つの基板要素に埋設又は設置される少なくとも1つのセンサ要素(34、48)と、
前記少なくとも1つのセンサ要素(34、48)に接続され、前記基板要素に作用する力又は前記基板要素の加圧力の変化による前記センサ要素(34、48)の電磁特性の変化に基づいて前記健全性を監視するように構成された測定サブシステム(36、49)と、を含むシステム。
【請求項2】
前記基板要素は、平板(15)とばねとリップルばね(20)と力−変位変換器とを含み、
前記基板要素は、前記固定子コア(10)の固定子巻線(16)どうしの間に配置され、
前記基板要素は、金属又は非金属の平板(15)から成る、請求項1に記載のシステム。
【請求項3】
前記基板要素に埋設又は配設された前記センサ要素(34、48)の前記電磁特性は、前記電気機械の運転時又は運転停止時に前記基板要素の加圧力又は前記基板要素に作用する時間変化する力に伴って変動する、請求項1に記載のシステム。
【請求項4】
前記電磁特性は、抵抗、歪み、コンダクタンス、透磁率、及び誘磁率を含む、請求項1に記載のシステム。
【請求項5】
電気機械の固定子楔の締め付けを監視するためのシステムであって、
固定子コア(10)の前記固定子楔(21)に近接配置される少なくとも1つの基板要素に埋設又は配設された少なくとも1つのセンサ要素(34、48)と、
前記基板要素の加圧の状態を示す少なくとも1つのスイッチ(66)と、
前記少なくとも1つのセンサ要素(34、48)に接続され、前記基板要素の加圧力の変化による前記センサ要素(34、48)の電磁特性の変化に基づいて前記固定子楔の締め付けを監視するように構成された測定サブシステム(36)と、を含むシステム。
【請求項6】
前記基板要素に埋設された前記少なくとも1つのセンサ要素(34、48)に直列に接続された、少なくとも1つのスイッチ(66)のアセンブリを含む、請求項5に記載のシステム。
【請求項7】
前記システムのシングルポート電気インターフェース(64)にわたって、複数の前記アセンブリを並列に配置したものを含む、請求項6に記載のシステム。
【請求項8】
電気等価回路(200)内で、前記基板要素の前記スイッチ(66、260)及び前記センサ要素(34、48)に直列に接続されたダイオード(210)のアセンブリを含む、請求項5に記載のシステム。
【請求項9】
前記固定子コア内で複数の固定子楔に近接配置された複数の基板要素を含むシステムであって、
前記基板要素は、前記シングルポート電気インターフェース(64)を介してモジュールに接続され、該モジュールは、前記シングルポート電気インターフェース(64)を介して前記基板要素において電気的測定を順次又は同時に行うように構成された装置である、請求項5に記載のシステム。
【請求項10】
電気機械における固定子楔の締め付けを監視する方法であって、
固定子コア内に配置された少なくとも1つの基板要素に埋設又は配設された、少なくとも1つのセンサ要素(34、48)を設けるステップと、
前記基板要素の加圧力の変化に対応する前記センサ要素の電磁特性の変化に基づいて信号を生成するステップと、
前記信号を解析した上で加圧範囲を監視及び推定することにより、前記固定子楔の締め付けを判定するステップと、を含む方法。
【図1】



【図2】

【図3】

【図4】
【図5】
【図6】

【図7】

【図8】

【図9】

【図10】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2012−47744(P2012−47744A)
【公開日】平成24年3月8日(2012.3.8)
【国際特許分類】
【出願番号】特願2011−185512(P2011−185512)
【出願日】平成23年8月29日(2011.8.29)
【出願人】(390041542)ゼネラル・エレクトリック・カンパニイ (6,332)
【Fターム(参考)】
【公開日】平成24年3月8日(2012.3.8)
【国際特許分類】
【出願日】平成23年8月29日(2011.8.29)
【出願人】(390041542)ゼネラル・エレクトリック・カンパニイ (6,332)
【Fターム(参考)】
[ Back to top ]