
電気機械装置、ロボット及び移動体
【課題】渦電流損失を抑制して、電気機械装置の効率を向上させる。
【解決手段】電気機械装置10であって、中心軸230と、中心軸230の外周に沿った第1の円筒面上に配置された永久磁石200と、永久磁石200の中心軸方向両端部に配置された第1、第2の磁石サイドヨーク215、216と、を有するローター20と、永久磁石200の外周に沿った第2の円筒面上に配置された電磁コイル100A、100Bと、第1の磁石サイドヨーク215を挟んで永久磁石200とは反対側に配置された磁気センサー300と、を有するステーター15と、を備え、第1、第2の磁石サイドヨーク215、216は、磁気センサー300が配置されない側の第2の磁石サイドヨーク216の永久磁石200と反対側の表面の磁束密度が、第1の磁石サイドヨーク215の永久磁石200と反対側の表面の磁束密度よりも小さくなるように構成されている。
【解決手段】電気機械装置10であって、中心軸230と、中心軸230の外周に沿った第1の円筒面上に配置された永久磁石200と、永久磁石200の中心軸方向両端部に配置された第1、第2の磁石サイドヨーク215、216と、を有するローター20と、永久磁石200の外周に沿った第2の円筒面上に配置された電磁コイル100A、100Bと、第1の磁石サイドヨーク215を挟んで永久磁石200とは反対側に配置された磁気センサー300と、を有するステーター15と、を備え、第1、第2の磁石サイドヨーク215、216は、磁気センサー300が配置されない側の第2の磁石サイドヨーク216の永久磁石200と反対側の表面の磁束密度が、第1の磁石サイドヨーク215の永久磁石200と反対側の表面の磁束密度よりも小さくなるように構成されている。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、電気機械装置、ロボット及び移動体に関する。
【背景技術】
【0002】
モーターのローター磁石の開放磁路側に磁性体を配置することにより、ローター磁石から漏れる磁束を磁性体に引き付け、ローター磁石の近傍に配置されている他の固定部材内に入り込む磁束を減少させて、他の固定部材での渦電流の発生を減少させる技術が知られている(例えば特許文献1)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2006−259446号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、モーター制御において、ローター磁石の位相を検知するための磁気センサーをローター磁石の近傍に配置し、磁気センサーの出力を用いてモーターの動作を制御する場合がある。かかる場合、磁性体から漏れる磁束を過度に減少させてしまうと、ローター磁石の位相を検知することが出来ず、モーターの制御ができなくなってしまう。従来の技術では、渦電流の発生と磁気センサーによる磁束の検知の両方を考慮した磁性体の構成については十分に検討されていなかった。
【0005】
本発明は、上述した従来の課題を解決するためになされたものであり、渦電流損失を抑制して、電気機械装置の効率を向上させることを目的とする。
【課題を解決するための手段】
【0006】
本発明は、上述の課題の少なくとも一部を解決するためになされたものであり、以下の形態又は適用例として実現することが可能である。
【0007】
[適用例1]
電気機械装置であって、中心軸と、前記中心軸の外周に沿った第1の円筒面上に配置された永久磁石と、前記永久磁石の中心軸方向両端部に配置された第1、第2の磁石サイドヨークと、を有するローターと、前記永久磁石の外周に沿った第2の円筒面上に配置された電磁コイルと、前記第1の磁石サイドヨークを挟んで前記永久磁石とは反対側に配置された磁気センサーと、を有するステーターと、を備え、前記第1、第2の磁石サイドヨークは、前記磁気センサーが配置されない側の前記第2の磁石サイドヨークの前記永久磁石と反対側の表面の磁束密度が、前記第1の磁石サイドヨークの前記永久磁石と反対側の表面の磁束密度よりも小さくなるように構成されている、電気機械装置。
この適用例によれば、磁気センサーが配置されない側の第2の磁石サイドヨークの永久磁石との反対側の表面の磁束密度は、磁気センサーが配置される側の第1の磁石サイドヨークの永久磁石との反対側の表面の磁束密度よりも小さいので、磁気センサーにおける磁束密度をその検出に十分なレベルに維持しつつ、磁気センサーが配置されない側における渦電流損失を抑制して、電気機械装置の効率を向上させることができる。
【0008】
[適用例2]
適用例1に記載の電気機械装置において、前記第1、第2の磁石サイドヨークは、前記第2の磁石サイドヨークの前記中心軸に沿った方向の厚さが、前記第1の磁石サイドヨークの前記中心軸に沿った方向の厚さよりも厚くなるように構成されている、電気機械装置。
この適用例によれば、第2の磁石サイドヨークの中心軸に沿った方向の厚さは、第1の磁石サイドヨークの中心軸に沿った方向の厚さよりも厚くなるように構成されているので、磁気センサーが配置されない側の第2の磁石サイドヨークの永久磁石との反対側の表面の磁束密度を、第1の磁石サイドヨークの永久磁石との反対側の表面の磁束密度よりも小さくできる。
【0009】
[適用例3]
適用例1または2に記載の電気機械装置において、前記第2の磁石サイドヨークは、前記第1の磁石サイドヨークよりも、比透磁率の大きな材料で形成されている、電気機械装置。
この適用例によれば、第2の磁石サイドヨークは、第1の磁石サイドヨークよりも、比透磁率の大きな材料で形成されているので、磁気センサーが配置されない側の第2の磁石サイドヨークの永久磁石との反対側の表面の磁束密度を、第1の磁石サイドヨークの永久磁石との反対側の表面の磁束密度よりも小さくできる。
【0010】
[適用例4]
適用例1〜3のいずれか一項に記載の電気機械装置において、前記第1の磁石サイドヨークの前記永久磁石と反対側の表面の磁束密度は100ミリテスラ以上300ミリテスラ以下であり、前記第2の磁石サイドヨークの前記永久磁石と反対側の表面の磁束密度は20ミリテスラ未満である、電気機械装置。
この適用例によれば、磁気センサーによる磁束密度の検出精度を十分に高度に維持すると共に、第2の磁石サイドヨーク側において、渦電流損失を抑制して、電気機械装置の効率を向上させることができる。
【0011】
[適用例5]
適用例1〜4のいずれか一項に記載の電気機械装置を備えるロボット。
【0012】
[適用例6]
適用例1〜4のいずれか一項に記載の電気機械装置を備える移動体。
【0013】
なお、本発明は、種々の形態で実現することが可能であり、例えば、モーターや発電装置などの電気機械装置のほか、それを用いたロボット、移動体等の形態で実現することができる。
【図面の簡単な説明】
【0014】
【図1】コアレスモーターの構成を示す説明図である。
【図2】コイルバックヨーク115と電磁コイル100A、100Bとを円筒面に沿って展開しコイルバックヨーク115側から見たときの状態を示す説明図である。
【図3】磁気センサー側の磁石サイドヨーク215近傍を拡大して示す説明図である。
【図4】磁気センサー300の出力信号の例を示す説明図である。
【図5】磁気センサー側と反対側の磁石サイドヨーク216近傍を拡大して示す説明図である。
【図6A】鉄損失の測定方法の一例を示す説明図である。
【図6B】磁石サイドヨーク216の厚さと被測定モーターの鉄損失の関係を示す説明図である。
【図7】磁石サイドヨーク厚さと磁石サイドヨーク表面の磁束密度の関係を示す説明図である。
【図8】本発明の変形例によるモーター/発電機を利用した移動体の一例としての電動自転車(電動アシスト自転車)を示す説明図である。
【図9】本発明の変形例によるモーターを利用したロボットの一例を示す説明図である。
【図10】本発明の変形例によるモーターを利用した双腕7軸ロボットの一例を示す説明図である。
【図11】本発明の変形例によるモーターを利用した鉄道車両を示す説明図である。
【発明を実施するための形態】
【0015】
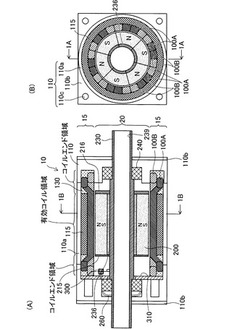
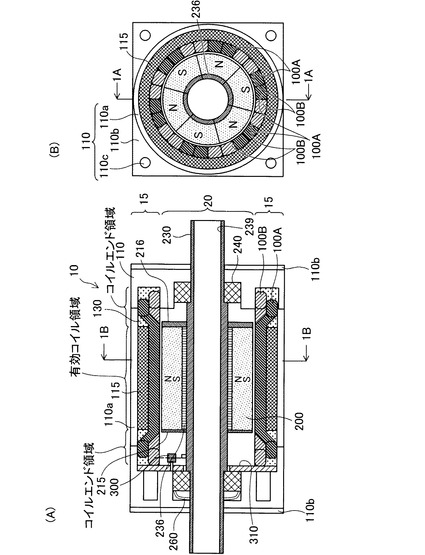
図1は、コアレスモーターの構成を示す説明図である。図1(A)は、コアレスモーター10を中心軸230に平行な面(図1(B)の1A−1A切断面)で切ったときの断面を模式的に示し、図1(B)は、コアレスモーターを中心軸230に垂直な面(図1(A)の1B−1B切断面)で切った断面を模式的に示している。
【0016】
コアレスモーター10は、略円筒状のステーター15が外側に配置され、略円筒状のローター20が内側に配置されたインナーローター型モーターである。ステーター15は、電磁コイル100A、100Bと、ケーシング110と、コイルバックヨーク115と、磁気センサー300とを備えている。ローター20は、中心軸230と、永久磁石200と、磁石サイドヨーク215、216と、磁石バックヨーク236と、軸受け240と、波バネ座金260と、を備えている。
【0017】
ローター20は、中心に中心軸230を有しており、中心軸230の外周には、磁石バックヨーク236が配置されている。磁石バックヨーク236の外周には、6つの永久磁石200が配置されている。6個の永久磁石200は、中心軸230の中心から外部に向かう方向(放射方向)に磁化された永久磁石200と、外部から中心軸230の中心に向かう方向(中心方向)に磁化された永久磁石200とを含んでおり、磁化方向が中心方向である永久磁石200と、磁化方向が放射方向である永久磁石200は、円周方向に沿って交互に配置されている。図1(B)の永久磁石200に付した「N」、「S」の符号は、永久磁石200の外周側の磁極の極性を示している。
【0018】
永久磁石200の中心軸230に沿った方向の端部には、磁石サイドヨーク215、216が設けられている。磁石サイドヨーク215、216は、軟磁性体材料で形成された円盤状の部材である。磁石サイドヨーク215の外側には、磁気センサー300がステーター15上に設けられている。磁気センサー300が配置される側の磁石サイドヨーク215を「第1の磁石サイドヨーク215」とも呼び、磁気センサー300が配置される側と反対側の磁石サイドヨーク216を「第2の磁石サイドヨーク216」とも呼ぶ。磁石サイドヨーク215の中心軸230に沿った方向の厚さは、磁石サイドヨーク216の中心軸230に沿った方向の厚さよりも薄い。磁束は、空気中よりも軟磁性体材料の中を通りやすいので、永久磁石200からでた磁束のうち、中心軸230方向に漏れ出た磁束は、磁石サイドヨーク215、216を通りやすい。
【0019】
中心軸230は、炭素繊維強化プラスチックで形成されており、貫通孔239を有している。中心軸230は、ケーシング110の軸受け240で支持されてケーシング110に取り付けられている。また、本実施例では、ケーシング110の内側に、波バネ座金260が設けられており、この波バネ座金260は、永久磁石200の位置決めを行っている。但し、波バネ座金260は省略可能である。
【0020】
ケーシング110は、筐体である。ケーシング110は、中心軸230方向の中央の円筒形部分110aと、両端の板状部分110bとを備える。円筒形部分110aは、アルミニウムなどの熱伝導性の良い材料で形成されている。板状部分110bは略正方形形状を有しており、4つの角に、コアレスモーター10を他の装置に固定するためのネジ穴110cを有している。ケーシング110の円筒形部分110aの内周側には、コイルバックヨーク115が設けられている。コイルバックヨーク115の中心軸230方向の長さは、永久磁石200の中心軸230方向の長さとほぼ同じである。中央の円筒形部分110aがアルミニウムなどの熱伝導性の良い材料で形成されているのは、コイルバックヨーク115に生じた熱を外部に容易に放出するためである。なお、コイルバックヨーク115に生じる熱の原因としては、ローター20の永久磁石200の回転にともなって生じる渦電流による損失(以下「渦電流損失」と呼ぶ。)があげられる。中心軸230からコイルバックヨーク115に向かって放射方向に放射線を引いたとき、放射線は、永久磁石200をちょうど貫く。すなわち、中心軸230から見ると、コイルバックヨーク115と永久磁石200は、重なって見える。
【0021】
コイルバックヨーク115の内周側には、コイルバックヨーク115の内周に沿って、二相の電磁コイル100A、100Bが配列されている。電磁コイル100A、100Bを区別しない場合、電磁コイル100A、100Bを合わせて「電磁コイル100」とも呼ぶ。電磁コイル100A、100Bは、有効コイル領域とコイルエンド領域とを有している。ここで有効コイル領域とは、電磁コイル100A、100Bに電流が流れたときに、ローター20に対して回転方向のローレンツ力を与える領域であり、コイルエンド領域は、電磁コイル100A、100Bに電流が流れたときに、ローター20に対して回転方向と異なる方向(主として回転方向に直行する方向)のローレンツ力を与える領域である。ただし、コイルエンド領域は、有効コイル領域を挟んで2つあり、それぞれのコイルエンド領域に生じるローレンツ力は、大きさが同じで、向きが反対であるので、互いに打ち消し合う。有効コイル領域においては、電磁コイル100A、100Bを構成する導体配線は、中心軸230とほぼ平行な方向であり、コイルエンド領域では、電磁コイル100A、100Bを構成する導体配線は、ローター20の回転方向と平行である。また、中心軸230からコイルバックヨーク115に向かって放射方向に放射線を引いたとき、放射線は、有効コイル領域を貫くが、コイルエンド領域は貫かない。すなわち、中心軸230から見ると、有効コイル領域は、永久磁石200とコイルバックヨーク115の両方と重なって見えるが、コイルエンド領域は、永久磁石200とコイルバックヨーク115のいずれとも重なって見えない。
【0022】
ステーター15には、さらに、ローター20の位相を検出する位置センサーとしての磁気センサー300が、電磁コイル100A、100Bの各相に1つずつ配置されている。磁気センサー300は、上述したように、磁石サイドヨーク215側に配置されており、磁石サイドヨーク216側には配置されていない。なお、図1(A)では、一方の相の磁気センサー300のみを表示している。磁気センサー300は、回路基板310の上に固定されており、回路基板310は、ケーシング110に固定されている。ここで、磁気センサー300は、コイルエンド領域から、中心軸230に垂線を降ろしたときの垂線上に配置されていてもよい。一般に、磁気センサー300は、磁束密度の方向の感度特性に異方性を有している。コイルエンド領域から中心軸230に垂線を降ろしたときの垂線上の位置に磁気センサー300が配置されていると、電磁コイル100から放射される磁束の強さが電磁コイル100に流れる電流の増減により変化しても、磁気センサー300の出力信号は、磁気センサー300の感度の異方性により、電流の増減による磁束の変化の影響を受けにくい。
【0023】
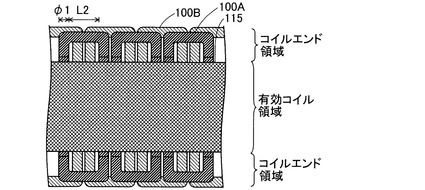
図2は、コイルバックヨーク115と電磁コイル100A、100Bとを円筒面に沿って展開し、コイルバックヨーク115側から見たときの状態を示す説明図である。電磁コイル100A、100Bは、それぞれ、角丸長方形形状に巻かれている。同相の電磁コイル同士、例えば電磁コイル100Aと100A、あるいは電磁コイル100Bと100Bは重なっていないが、異相の電磁コイル同士、例えば電磁コイル100Aと100Bは一部重なっている。また、電磁コイル100Aの有効コイル領域の2つの導体の束の間に、2つの電磁コイル100Bの有効コイル領域の導体の束が収まっている。同様に、電磁コイル100Bの有効コイル領域の2つの導体の束の間に、2つの電磁コイル100Aの有効コイル領域の導体の束が収まっている。また、電磁コイル100Aのコイルエンド領域は、円筒面から外側(図2の手前方向)に曲げられており(図1(A)参照)、電磁コイル100Bのコイルエンド領域と重ならない。このように、電磁コイル100Aのコイルエンド領域を外側に曲げることにより、電磁コイル100Aと100Bとを同じ円筒面上に配置しつつ、互いに干渉しないように配置することができる。本実施例では、電磁コイル100A、100Bの導体の束の太さφ1と、有効コイル領域におけるコイル束の間隔をL2との間にはL2≒2×φ1の関係を有している。すなわち、電磁コイル100A、100Bが配置される円筒面は、電磁コイル100A、100Bの導体の束によりほぼ占められているので、電磁コイルの占積率を向上させ、コアレスモーター10(図1)の効率を向上させることができる。なお、図2では、図示の便宜上、隣り合う電磁コイル同士の間に隙間が描かれているが、L2≒2×φ1の関係にあれば、この隙間は、ほぼゼロとなる。
【0024】
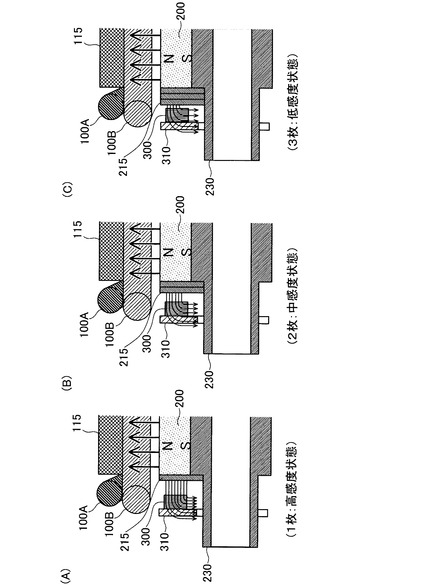
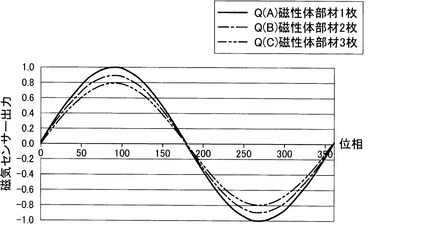
図3は、磁気センサー側の磁石サイドヨーク215近傍を拡大して示す説明図である。図4は、磁気センサー300の出力信号の例を示す説明図である。本実施例では、磁石サイドヨーク215、216を構成する材料として、JFEスチール株式会社のJNEXコアの0.1mm厚の珪素鋼板材を用いている。JNEXコアは、鋼板材の全域に6.5%の珪素(Si)を含有している。図3(A)〜(C)は、磁石サイドヨーク215として用いる珪素鋼板の枚数が異なっている。例えば、図3(A)に示す例は、珪素鋼板材の枚数が1枚であり、図3(B)に示す例は2枚であり、図3(C)に示す例は3枚である。なお、図4に示されるセンサー出力Q(A)〜Q(C)は、それぞれ、図3(A)〜(C)に対応している。上述したように、磁石サイドヨーク215は、永久磁石200から中心軸230に沿った方向に漏れた磁束を減少させるが、ある程度の磁束は磁石サイドヨーク215から漏れる。ここで、磁気センサー300は、永久磁石200から見て、磁石サイドヨーク215のさらに中心軸230に沿った方向に離れた位置に配置されている。すなわち、磁気センサー300は、磁石サイドヨーク215から漏れた磁束の密度を検出する。図4のセンサー出力Q(A)からQ(B)、Q(C)の順に示すように、磁石サイドヨーク215を形成する珪素鋼板材の枚数が増えると、磁気センサー300の出力信号の波形は、だんだんとピーク高さが小さくなっている。すなわち、磁石サイドヨーク215を形成する珪素鋼板材の枚数が多いと(磁石サイドヨーク215の厚さが厚いと)、永久磁石200の磁束について、磁石サイドヨーク215から漏れる磁束が少なくなる。その結果、磁気センサー300が検知する磁束密度が小さくなり、出力信号の大きさが小さくなる。なお、出力信号の大きさが小さくなりすぎると、出力信号を用いてコアレスモーター10を制御することが困難になるので、磁石サイドヨーク215の厚さを、磁気センサー300が一定以上の出力信号を出力できる程度の厚さ以下に設定することが好ましい。一方、磁石サイドヨーク215の厚さを薄くすると、磁気センサー300の出力信号の大きさは大きくなる、ここで、磁石サイドヨーク215の厚さをさらに薄く(例えば、0.05mmの珪素鋼板材1枚で形成する)すると、磁気センサー300の出力信号の波形は飽和する。したがって、磁石サイドヨーク215の厚さを、磁気センサー300の出力信号の波形が飽和しない程度の厚さ以上に設定することが好ましい。
【0025】
なお、磁石サイドヨーク215から漏れた磁束は、磁気センサー300を貫くだけでなく、軸受け240やケーシング110にも到達する。そして、軸受け240やケーシング110において渦電流損失を生じさせる。したがって、磁気センサー300として出来る限り高感度タイプを選択し、磁石サイドヨーク215の厚さを厚くして、軸受け240やケーシング110に到達する磁束を少なくすることが好ましい。なお、磁石サイドヨーク215を構成する個々の珪素鋼板(磁性体板)の両面に絶縁膜を設けるように構成してもよい。こうすれば、電磁コイル100A、100Bで発生した磁束に起因する、磁石サイドヨーク215における渦電流損失をさらに軽減することができる。ただし、絶縁膜を設けなくても良い。
【0026】
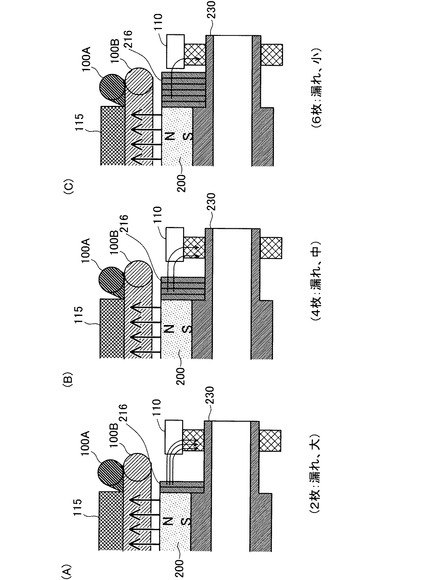
図5は、磁気センサー側と反対側の磁石サイドヨーク216近傍を拡大して示す説明図である。図5(A)〜(C)は、磁石サイドヨーク216として用いる珪素鋼板の枚数が異なっている。例えば、図5(A)に示す例は、珪素鋼板材の枚数が2枚(合計厚さ0.2mm)であり、図5(B)に示す例は4枚(合計厚さ0.4mm)であり、図5(C)に示す例は6枚(合計厚さ0.6mm)である。図3の説明で説明したように、磁石サイドヨーク216を形成する珪素鋼板材の枚数が多いと(磁石サイドヨーク216の厚さが厚いと)、永久磁石200の磁束について、磁石サイドヨーク216から漏れる磁束が少なくなる。磁石サイドヨーク216から漏れた磁束は、軸受け240やケーシング110に到達し、軸受け240やケーシング110において生じる渦電流損失の原因となる。渦電流損失は、ヒステリシス損と合わせて鉄損失の主な要素である。本実施例では、磁石サイドヨーク216側には、磁気センサー300が設けられていないので、磁石サイドヨーク216から漏れる磁束は、少なければ少ないほどよく、磁石サイドヨーク216は厚いほど好ましい。
【0027】
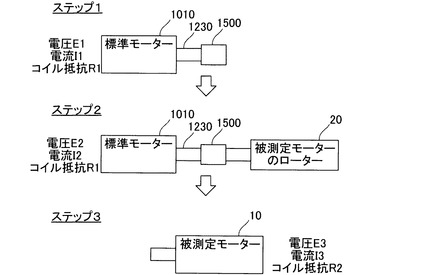
図6Aは、鉄損失の測定方法の一例を示す説明図である。ステップ1では、まず、標準モーター1010の損失特性を測定する。標準モーター1010の中心軸1230に、被測定モーター10を接続するためのカップリング1500を取り付ける。この状態で、あらかじめ定められた回転数Nで標準モーター1010を回転させて、標準モーター1010に加える電圧E1と電流I1を測定する。このときの回転状態は、いわゆる無負荷回転状態である。このときの標準モーター1010の第1の総損失P1allは、E1×I1となる。また、第1の総損失P1allは、機械損失P1mと銅損失P1cuと鉄損失P1feの和である。ここで、標準モーター1010の電磁コイルの電気抵抗をR1とすると、銅損失P1cuは、I12×R1で表される。
【0028】
ステップ2では、標準モーター1010に被測定モーター10のローター15のみを接続し、ステップ1と同一の回転数Nで標準モーター1010を回転させて、標準モーター1010に加える電圧E2と電流I2を測定する。このときの第2の総損失P2allはE2×I2となる。なお、この第2の総損失P2allは、第1の総損失P1allに被測定モーター10の機械損失P2mが加わったものである。すなわち、2の総損失P2allと第1の総損失P1allの差分(P2all−P1all)が、被測定モーター10の機械損失P2mとなる。
【0029】
ステップ3では、被測定モーター10のみをステップ1,2と同じ回転数Nで回転させて、被測定モーター10に加える電圧E3と電流I3を測定する。このときの被測定モーター10の総損失P3allは、E3×I3となる。また、総損失P3allは、機械損失P3mと銅損失P3cuと鉄損失P3feの和である。ここで、機械損失P3mは、ステップ2で測定した、機械損失P2mと同じ値である。また、銅損失P3cuは、被測定モーター10の電磁コイルの電気抵抗をR2とすると、I32×R2で示すことが出来る。したがって、被測定モーターの鉄損失は、(E3×I3−P3m−I32×R2)で算出することができる。
【0030】
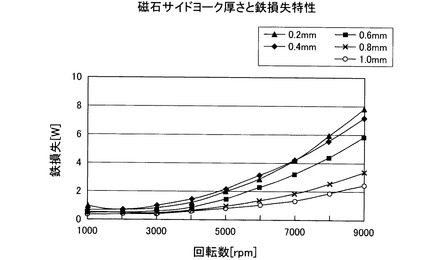
図6Bは、磁石サイドヨーク216の厚さと被測定モーターの鉄損失の関係を示す説明図である。この鉄損失は、被測定モーター10内のローター20にある永久磁石200の回転数(電気角ω)により、磁束は軸受け240とケーシング110間に渦電流損失として生じる。図6Bでは、磁石サイドヨーク216を形成する珪素鋼板の枚数を変えることにより磁石サイドヨーク216の厚さを、0.2mm、0.4mm、0.6mm、0.8mm、1.0mmにしたものについて、鉄損失特性を示している。ここで1枚の珪素鋼板の厚みは0.1mmである。グラフから明らかなように、珪素鋼板材の枚数を増やすと、被測定モーターの鉄損失が少なくなっている。そして、珪素鋼板材の枚数を2枚から4枚に増やしたときの鉄損失の減少量よりも、珪素鋼板材の枚数を6枚から8枚に増やしたときの鉄損失の減少量の方が大きくなっている。ただし、珪素鋼板材の枚数を8枚から10枚に増やしても、鉄損失は大きく減少していない。この理由として、以下の理由が考えられる。鉄損失は、渦電流損失とヒステリシス損失とを含んでいる。鉄損失のうち、渦電流損失については、磁石サイドヨーク216の厚さを厚くすることにより、減らすことが可能であるが、ヒステリシス損失については、磁石サイドヨーク216の厚さを厚くしても減らすことが難しく、このヒステリシス損失が残っていると考えられる。以上の結果から、磁石サイドヨーク216の厚さを1mm程度にすることにより、鉄損失のうち、渦電流損失については、十分に少なくすることができる。
【0031】
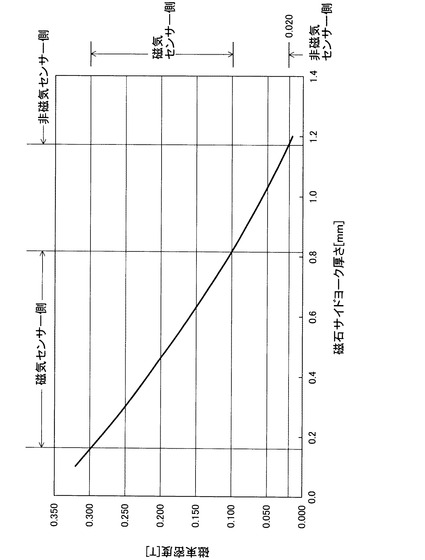
図7は、磁石サイドヨーク厚さと磁石サイドヨーク表面の磁束密度の関係を示す説明図である。ここで「磁石サイドヨーク表面の磁束密度」とは、磁石サイドヨークの永久磁石とは反対側の表面の磁束密度を意味する。磁石サイドヨーク表面の磁束密度を、0.02テスラ(20ミリテスラ)以下とすれば、軸受け240やケーシング110に到達する磁束を少なくし、軸受け240やケーシング110における渦電流損失の発生を抑制し、鉄損失を少なくすることが出来る。磁石サイドヨーク表面の磁束密度が0.02テスラのときの磁石サイドヨーク216の厚さは、1.2mmである。図6における磁石サイドヨーク216の厚さと、渦電流損失の傾向から、磁石サイドヨーク216の厚さは、1.2mmであれば、渦電流損失は、ほとんど発生しないと考えられる。したがって、磁気センサーが設けられていない側の磁石サイドヨーク216の表面の磁束密度を0.02テスラ(20ミリテスラ)未満とすることにより、軸受け240やケーシング110に到達する磁束を少なくし、軸受け240やケーシング110における渦電流損失の発生を抑制し、鉄損失を少なくすることが出来る。
【0032】
また、磁気センサー300が設けられた側の磁石サイドヨーク215については、図3、4に示す結果において、珪素鋼板材の枚数が1枚(0.1mm)のとき磁気センサーの出力波形がほぼ飽和していることから、磁石サイドヨーク215の厚さは、0.1mmよりも厚い値であることが好ましい。このときの磁石サイドヨーク215の表面の磁束密度は、0.3テスラ(300ミリテスラ)以上である。また、磁石サイドヨーク215を増大させて、軸受け240やケーシング110における渦電流損失の発生を低減しようとすると、磁気センサー300における磁束密度が過度に低下してしまい、磁気センサー300の検出精度が悪化する。磁石サイドヨーク215の表面の磁束密度が0.1テスラ(100ミリテスラ)より小さくなると、磁気センサー300の検出精度が悪化する。したがって、磁石サイドヨーク215の厚さは0.8mm以下であることが好ましい。なお、磁気センサー300には、ホール素子からの信号の増幅回路と温度補償回路を備えたホールICを用いることが好ましい。この増幅回路で増幅ゲインの高い高感度品を用いることで、磁石サイドヨーク215から受ける渦電流損失を最小として成るようにすること好ましい。
【0033】
一般に、モーターでは、様々な強度に磁化された永久磁石を用いるので、磁石サイドヨークの好ましい厚みは、永久磁石の強度に応じて変化する。このような場合にも、第1の磁石サイドヨーク215の表面の磁束密度を20ミリテスラ未満とすることが好ましく、第2の磁石サイドヨーク216の表面の磁束密度を100ミリテスラ以上300ミリテスラ以下とすることが好ましい。
【0034】
以上、本実施例によれば、磁気センサー300が配置されない側の第2の磁石サイドヨーク216の表面の磁束密度を、磁気センサー300が配置される側の第1の磁石サイドヨーク215の表面の磁束密度よりも小さく設定しているので、第2の磁石サイドヨーク216からの磁束の漏れを少なくすることができる。その結果、磁気センサー300が配置されない側のケーシング110や軸受け240における渦電流損失に起因する鉄損失を少なくし、コアレスモーター10の効率を向上させることが出来る。
【0035】
上記構成の実現のため、第2の磁石サイドヨーク216の中心軸230に沿った方向の厚さを、第1の磁石サイドヨーク215の中心軸230に沿った方向の厚さよりも厚くすることが好ましい。この代わりに、第2の磁石サイドヨーク216を、第1の磁石サイドヨーク215よりも、比透磁率の大きな材料で形成してもよい。比透磁率の大きな材料は磁束を外部に漏らしにくい。したがって、磁石サイドヨーク216に比透磁率の大きな材料を用いることは、磁石サイドヨーク216の厚さを厚くすることと同様の効果がある。
【0036】
また、第1の磁石サイドヨーク215の表面の磁束密度を100ミリテスラ以上300ミリテスラ以下とし、第2の磁石サイドヨーク216の表面の磁束密度は20ミリテスラ未満とすることにより、第2の磁石サイドヨーク216側のケーシング110や軸受け240における渦電流損失、鉄損失を大きく減少することができる。また、第1の磁石サイドヨーク215を過度の厚くしていないため、第1のサイドヨークを通過した磁束を磁気センサー300で検知し、磁気センサー300の出力信号を、コアレスモーター10の制御に用いることが出来る。
【0037】
本実施例では、コアレスモーター10を用いて説明してきたが、モーターは、コアレスモーターに限られず、コア付モーターであってもよい。
【0038】
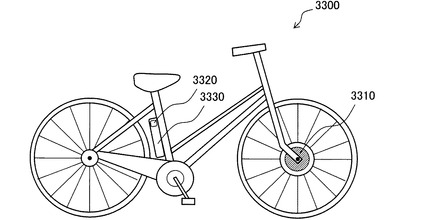
図8は、本発明の変形例によるモーター/発電機を利用した移動体の一例としての電動自転車(電動アシスト自転車)を示す説明図である。この自転車3300は、前輪にモーター3310が設けられており、サドルの下方のフレームに制御回路3320と充電池3330とが設けられている。モーター3310は、充電池3330からの電力を利用して前輪を駆動することによって、走行をアシストする。また、ブレーキ時にはモーター3310で回生された電力が充電池3330に充電される。制御回路3320は、モーターの駆動と回生とを制御する回路である。このモーター3310としては、上述した各種のコアレスモーター10を利用することが可能である。
【0039】
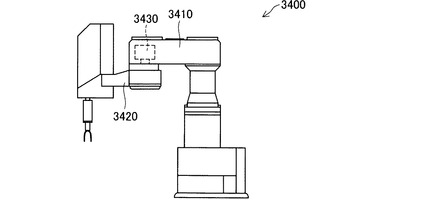
図9は、本発明の変形例によるモーターを利用したロボットの一例を示す説明図である。このロボット3400は、第1と第2のアーム3410,3420と、モーター3430とを有している。このモーター3430は、被駆動部材としての第2のアーム3420を水平回転させる際に使用される。このモーター3430としては、上述した各種のコアレスモーター10を利用することが可能である。
【0040】
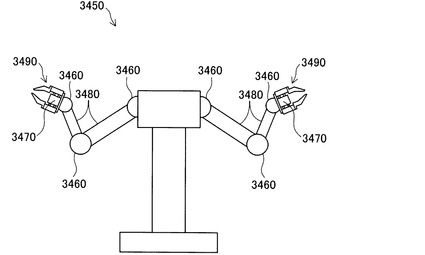
図10は、本発明の変形例によるモーターを利用した双腕7軸ロボットの一例を示す説明図である。双腕7軸ロボット3450は、関節モーター3460と、把持部モーター3470と、アーム3480と、把持部3490と、を備える。関節モーター3460は、肩関節、肘関節、手首関節に相当する位置に配置されている。関節モーター3460は、アーム3480と把持部3490とを、3次元的に動作させるため、各関節につき2つのモーターを備えている。また、把持部モーター3470は、把持部3590を開閉し、把持部3490に物を掴ませる。双腕7軸ロボット3450において、関節モーター3460あるいは把持部モーター3470として、上述した各種のコアレスモーターを利用することが可能である。
【0041】
図11は、本発明の変形例によるモーターを利用した鉄道車両を示す説明図である。この鉄道車両3500は、電動モーター3510と、車輪3520とを有している。この電動モーター3510は、車輪3520を駆動する。さらに、電動モーター3510は、鉄道車両3500の制動時には発電機として利用され、電力が回生される。この電動モーター3510としては、上述した各種のコアレスモーター10を利用することができる。
【0042】
以上、いくつかの実施例に基づいて本発明の実施の形態について説明してきたが、上記した発明の実施の形態は、本発明の理解を容易にするためのものであり、本発明を限定するものではない。本発明は、その趣旨並びに特許請求の範囲を逸脱することなく、変更、改良され得るとともに、本発明にはその等価物が含まれることはもちろんである。
【符号の説明】
【0043】
10…コアレスモーター
15…ステーター
20…ローター
100、100A、100B…電磁コイル
110…ケーシング
110a…円筒形部分
115…コイルバックヨーク
200…永久磁石
215、216…磁石サイドヨーク
230…中心軸
236…磁石バックヨーク
239…貫通孔
240…軸受け
260…波バネ座金
300…磁気センサー
310…回路基板
1010…標準モーター
1230…中心軸
1500…カップリング
3300…自転車
3310…モーター
3320…制御回路
3330…充電池
3400…ロボット
3410…第1のアーム
3420…第2のアーム
3430…モーター
3450…双腕7軸ロボット
3460…関節モーター
3470…把持部モーター
3480…アーム
3490…把持部
3500…鉄道車両
3510…電動モーター
3520…車輪
3590…把持部
【技術分野】
【0001】
本発明は、電気機械装置、ロボット及び移動体に関する。
【背景技術】
【0002】
モーターのローター磁石の開放磁路側に磁性体を配置することにより、ローター磁石から漏れる磁束を磁性体に引き付け、ローター磁石の近傍に配置されている他の固定部材内に入り込む磁束を減少させて、他の固定部材での渦電流の発生を減少させる技術が知られている(例えば特許文献1)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2006−259446号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、モーター制御において、ローター磁石の位相を検知するための磁気センサーをローター磁石の近傍に配置し、磁気センサーの出力を用いてモーターの動作を制御する場合がある。かかる場合、磁性体から漏れる磁束を過度に減少させてしまうと、ローター磁石の位相を検知することが出来ず、モーターの制御ができなくなってしまう。従来の技術では、渦電流の発生と磁気センサーによる磁束の検知の両方を考慮した磁性体の構成については十分に検討されていなかった。
【0005】
本発明は、上述した従来の課題を解決するためになされたものであり、渦電流損失を抑制して、電気機械装置の効率を向上させることを目的とする。
【課題を解決するための手段】
【0006】
本発明は、上述の課題の少なくとも一部を解決するためになされたものであり、以下の形態又は適用例として実現することが可能である。
【0007】
[適用例1]
電気機械装置であって、中心軸と、前記中心軸の外周に沿った第1の円筒面上に配置された永久磁石と、前記永久磁石の中心軸方向両端部に配置された第1、第2の磁石サイドヨークと、を有するローターと、前記永久磁石の外周に沿った第2の円筒面上に配置された電磁コイルと、前記第1の磁石サイドヨークを挟んで前記永久磁石とは反対側に配置された磁気センサーと、を有するステーターと、を備え、前記第1、第2の磁石サイドヨークは、前記磁気センサーが配置されない側の前記第2の磁石サイドヨークの前記永久磁石と反対側の表面の磁束密度が、前記第1の磁石サイドヨークの前記永久磁石と反対側の表面の磁束密度よりも小さくなるように構成されている、電気機械装置。
この適用例によれば、磁気センサーが配置されない側の第2の磁石サイドヨークの永久磁石との反対側の表面の磁束密度は、磁気センサーが配置される側の第1の磁石サイドヨークの永久磁石との反対側の表面の磁束密度よりも小さいので、磁気センサーにおける磁束密度をその検出に十分なレベルに維持しつつ、磁気センサーが配置されない側における渦電流損失を抑制して、電気機械装置の効率を向上させることができる。
【0008】
[適用例2]
適用例1に記載の電気機械装置において、前記第1、第2の磁石サイドヨークは、前記第2の磁石サイドヨークの前記中心軸に沿った方向の厚さが、前記第1の磁石サイドヨークの前記中心軸に沿った方向の厚さよりも厚くなるように構成されている、電気機械装置。
この適用例によれば、第2の磁石サイドヨークの中心軸に沿った方向の厚さは、第1の磁石サイドヨークの中心軸に沿った方向の厚さよりも厚くなるように構成されているので、磁気センサーが配置されない側の第2の磁石サイドヨークの永久磁石との反対側の表面の磁束密度を、第1の磁石サイドヨークの永久磁石との反対側の表面の磁束密度よりも小さくできる。
【0009】
[適用例3]
適用例1または2に記載の電気機械装置において、前記第2の磁石サイドヨークは、前記第1の磁石サイドヨークよりも、比透磁率の大きな材料で形成されている、電気機械装置。
この適用例によれば、第2の磁石サイドヨークは、第1の磁石サイドヨークよりも、比透磁率の大きな材料で形成されているので、磁気センサーが配置されない側の第2の磁石サイドヨークの永久磁石との反対側の表面の磁束密度を、第1の磁石サイドヨークの永久磁石との反対側の表面の磁束密度よりも小さくできる。
【0010】
[適用例4]
適用例1〜3のいずれか一項に記載の電気機械装置において、前記第1の磁石サイドヨークの前記永久磁石と反対側の表面の磁束密度は100ミリテスラ以上300ミリテスラ以下であり、前記第2の磁石サイドヨークの前記永久磁石と反対側の表面の磁束密度は20ミリテスラ未満である、電気機械装置。
この適用例によれば、磁気センサーによる磁束密度の検出精度を十分に高度に維持すると共に、第2の磁石サイドヨーク側において、渦電流損失を抑制して、電気機械装置の効率を向上させることができる。
【0011】
[適用例5]
適用例1〜4のいずれか一項に記載の電気機械装置を備えるロボット。
【0012】
[適用例6]
適用例1〜4のいずれか一項に記載の電気機械装置を備える移動体。
【0013】
なお、本発明は、種々の形態で実現することが可能であり、例えば、モーターや発電装置などの電気機械装置のほか、それを用いたロボット、移動体等の形態で実現することができる。
【図面の簡単な説明】
【0014】
【図1】コアレスモーターの構成を示す説明図である。
【図2】コイルバックヨーク115と電磁コイル100A、100Bとを円筒面に沿って展開しコイルバックヨーク115側から見たときの状態を示す説明図である。
【図3】磁気センサー側の磁石サイドヨーク215近傍を拡大して示す説明図である。
【図4】磁気センサー300の出力信号の例を示す説明図である。
【図5】磁気センサー側と反対側の磁石サイドヨーク216近傍を拡大して示す説明図である。
【図6A】鉄損失の測定方法の一例を示す説明図である。
【図6B】磁石サイドヨーク216の厚さと被測定モーターの鉄損失の関係を示す説明図である。
【図7】磁石サイドヨーク厚さと磁石サイドヨーク表面の磁束密度の関係を示す説明図である。
【図8】本発明の変形例によるモーター/発電機を利用した移動体の一例としての電動自転車(電動アシスト自転車)を示す説明図である。
【図9】本発明の変形例によるモーターを利用したロボットの一例を示す説明図である。
【図10】本発明の変形例によるモーターを利用した双腕7軸ロボットの一例を示す説明図である。
【図11】本発明の変形例によるモーターを利用した鉄道車両を示す説明図である。
【発明を実施するための形態】
【0015】
図1は、コアレスモーターの構成を示す説明図である。図1(A)は、コアレスモーター10を中心軸230に平行な面(図1(B)の1A−1A切断面)で切ったときの断面を模式的に示し、図1(B)は、コアレスモーターを中心軸230に垂直な面(図1(A)の1B−1B切断面)で切った断面を模式的に示している。
【0016】
コアレスモーター10は、略円筒状のステーター15が外側に配置され、略円筒状のローター20が内側に配置されたインナーローター型モーターである。ステーター15は、電磁コイル100A、100Bと、ケーシング110と、コイルバックヨーク115と、磁気センサー300とを備えている。ローター20は、中心軸230と、永久磁石200と、磁石サイドヨーク215、216と、磁石バックヨーク236と、軸受け240と、波バネ座金260と、を備えている。
【0017】
ローター20は、中心に中心軸230を有しており、中心軸230の外周には、磁石バックヨーク236が配置されている。磁石バックヨーク236の外周には、6つの永久磁石200が配置されている。6個の永久磁石200は、中心軸230の中心から外部に向かう方向(放射方向)に磁化された永久磁石200と、外部から中心軸230の中心に向かう方向(中心方向)に磁化された永久磁石200とを含んでおり、磁化方向が中心方向である永久磁石200と、磁化方向が放射方向である永久磁石200は、円周方向に沿って交互に配置されている。図1(B)の永久磁石200に付した「N」、「S」の符号は、永久磁石200の外周側の磁極の極性を示している。
【0018】
永久磁石200の中心軸230に沿った方向の端部には、磁石サイドヨーク215、216が設けられている。磁石サイドヨーク215、216は、軟磁性体材料で形成された円盤状の部材である。磁石サイドヨーク215の外側には、磁気センサー300がステーター15上に設けられている。磁気センサー300が配置される側の磁石サイドヨーク215を「第1の磁石サイドヨーク215」とも呼び、磁気センサー300が配置される側と反対側の磁石サイドヨーク216を「第2の磁石サイドヨーク216」とも呼ぶ。磁石サイドヨーク215の中心軸230に沿った方向の厚さは、磁石サイドヨーク216の中心軸230に沿った方向の厚さよりも薄い。磁束は、空気中よりも軟磁性体材料の中を通りやすいので、永久磁石200からでた磁束のうち、中心軸230方向に漏れ出た磁束は、磁石サイドヨーク215、216を通りやすい。
【0019】
中心軸230は、炭素繊維強化プラスチックで形成されており、貫通孔239を有している。中心軸230は、ケーシング110の軸受け240で支持されてケーシング110に取り付けられている。また、本実施例では、ケーシング110の内側に、波バネ座金260が設けられており、この波バネ座金260は、永久磁石200の位置決めを行っている。但し、波バネ座金260は省略可能である。
【0020】
ケーシング110は、筐体である。ケーシング110は、中心軸230方向の中央の円筒形部分110aと、両端の板状部分110bとを備える。円筒形部分110aは、アルミニウムなどの熱伝導性の良い材料で形成されている。板状部分110bは略正方形形状を有しており、4つの角に、コアレスモーター10を他の装置に固定するためのネジ穴110cを有している。ケーシング110の円筒形部分110aの内周側には、コイルバックヨーク115が設けられている。コイルバックヨーク115の中心軸230方向の長さは、永久磁石200の中心軸230方向の長さとほぼ同じである。中央の円筒形部分110aがアルミニウムなどの熱伝導性の良い材料で形成されているのは、コイルバックヨーク115に生じた熱を外部に容易に放出するためである。なお、コイルバックヨーク115に生じる熱の原因としては、ローター20の永久磁石200の回転にともなって生じる渦電流による損失(以下「渦電流損失」と呼ぶ。)があげられる。中心軸230からコイルバックヨーク115に向かって放射方向に放射線を引いたとき、放射線は、永久磁石200をちょうど貫く。すなわち、中心軸230から見ると、コイルバックヨーク115と永久磁石200は、重なって見える。
【0021】
コイルバックヨーク115の内周側には、コイルバックヨーク115の内周に沿って、二相の電磁コイル100A、100Bが配列されている。電磁コイル100A、100Bを区別しない場合、電磁コイル100A、100Bを合わせて「電磁コイル100」とも呼ぶ。電磁コイル100A、100Bは、有効コイル領域とコイルエンド領域とを有している。ここで有効コイル領域とは、電磁コイル100A、100Bに電流が流れたときに、ローター20に対して回転方向のローレンツ力を与える領域であり、コイルエンド領域は、電磁コイル100A、100Bに電流が流れたときに、ローター20に対して回転方向と異なる方向(主として回転方向に直行する方向)のローレンツ力を与える領域である。ただし、コイルエンド領域は、有効コイル領域を挟んで2つあり、それぞれのコイルエンド領域に生じるローレンツ力は、大きさが同じで、向きが反対であるので、互いに打ち消し合う。有効コイル領域においては、電磁コイル100A、100Bを構成する導体配線は、中心軸230とほぼ平行な方向であり、コイルエンド領域では、電磁コイル100A、100Bを構成する導体配線は、ローター20の回転方向と平行である。また、中心軸230からコイルバックヨーク115に向かって放射方向に放射線を引いたとき、放射線は、有効コイル領域を貫くが、コイルエンド領域は貫かない。すなわち、中心軸230から見ると、有効コイル領域は、永久磁石200とコイルバックヨーク115の両方と重なって見えるが、コイルエンド領域は、永久磁石200とコイルバックヨーク115のいずれとも重なって見えない。
【0022】
ステーター15には、さらに、ローター20の位相を検出する位置センサーとしての磁気センサー300が、電磁コイル100A、100Bの各相に1つずつ配置されている。磁気センサー300は、上述したように、磁石サイドヨーク215側に配置されており、磁石サイドヨーク216側には配置されていない。なお、図1(A)では、一方の相の磁気センサー300のみを表示している。磁気センサー300は、回路基板310の上に固定されており、回路基板310は、ケーシング110に固定されている。ここで、磁気センサー300は、コイルエンド領域から、中心軸230に垂線を降ろしたときの垂線上に配置されていてもよい。一般に、磁気センサー300は、磁束密度の方向の感度特性に異方性を有している。コイルエンド領域から中心軸230に垂線を降ろしたときの垂線上の位置に磁気センサー300が配置されていると、電磁コイル100から放射される磁束の強さが電磁コイル100に流れる電流の増減により変化しても、磁気センサー300の出力信号は、磁気センサー300の感度の異方性により、電流の増減による磁束の変化の影響を受けにくい。
【0023】
図2は、コイルバックヨーク115と電磁コイル100A、100Bとを円筒面に沿って展開し、コイルバックヨーク115側から見たときの状態を示す説明図である。電磁コイル100A、100Bは、それぞれ、角丸長方形形状に巻かれている。同相の電磁コイル同士、例えば電磁コイル100Aと100A、あるいは電磁コイル100Bと100Bは重なっていないが、異相の電磁コイル同士、例えば電磁コイル100Aと100Bは一部重なっている。また、電磁コイル100Aの有効コイル領域の2つの導体の束の間に、2つの電磁コイル100Bの有効コイル領域の導体の束が収まっている。同様に、電磁コイル100Bの有効コイル領域の2つの導体の束の間に、2つの電磁コイル100Aの有効コイル領域の導体の束が収まっている。また、電磁コイル100Aのコイルエンド領域は、円筒面から外側(図2の手前方向)に曲げられており(図1(A)参照)、電磁コイル100Bのコイルエンド領域と重ならない。このように、電磁コイル100Aのコイルエンド領域を外側に曲げることにより、電磁コイル100Aと100Bとを同じ円筒面上に配置しつつ、互いに干渉しないように配置することができる。本実施例では、電磁コイル100A、100Bの導体の束の太さφ1と、有効コイル領域におけるコイル束の間隔をL2との間にはL2≒2×φ1の関係を有している。すなわち、電磁コイル100A、100Bが配置される円筒面は、電磁コイル100A、100Bの導体の束によりほぼ占められているので、電磁コイルの占積率を向上させ、コアレスモーター10(図1)の効率を向上させることができる。なお、図2では、図示の便宜上、隣り合う電磁コイル同士の間に隙間が描かれているが、L2≒2×φ1の関係にあれば、この隙間は、ほぼゼロとなる。
【0024】
図3は、磁気センサー側の磁石サイドヨーク215近傍を拡大して示す説明図である。図4は、磁気センサー300の出力信号の例を示す説明図である。本実施例では、磁石サイドヨーク215、216を構成する材料として、JFEスチール株式会社のJNEXコアの0.1mm厚の珪素鋼板材を用いている。JNEXコアは、鋼板材の全域に6.5%の珪素(Si)を含有している。図3(A)〜(C)は、磁石サイドヨーク215として用いる珪素鋼板の枚数が異なっている。例えば、図3(A)に示す例は、珪素鋼板材の枚数が1枚であり、図3(B)に示す例は2枚であり、図3(C)に示す例は3枚である。なお、図4に示されるセンサー出力Q(A)〜Q(C)は、それぞれ、図3(A)〜(C)に対応している。上述したように、磁石サイドヨーク215は、永久磁石200から中心軸230に沿った方向に漏れた磁束を減少させるが、ある程度の磁束は磁石サイドヨーク215から漏れる。ここで、磁気センサー300は、永久磁石200から見て、磁石サイドヨーク215のさらに中心軸230に沿った方向に離れた位置に配置されている。すなわち、磁気センサー300は、磁石サイドヨーク215から漏れた磁束の密度を検出する。図4のセンサー出力Q(A)からQ(B)、Q(C)の順に示すように、磁石サイドヨーク215を形成する珪素鋼板材の枚数が増えると、磁気センサー300の出力信号の波形は、だんだんとピーク高さが小さくなっている。すなわち、磁石サイドヨーク215を形成する珪素鋼板材の枚数が多いと(磁石サイドヨーク215の厚さが厚いと)、永久磁石200の磁束について、磁石サイドヨーク215から漏れる磁束が少なくなる。その結果、磁気センサー300が検知する磁束密度が小さくなり、出力信号の大きさが小さくなる。なお、出力信号の大きさが小さくなりすぎると、出力信号を用いてコアレスモーター10を制御することが困難になるので、磁石サイドヨーク215の厚さを、磁気センサー300が一定以上の出力信号を出力できる程度の厚さ以下に設定することが好ましい。一方、磁石サイドヨーク215の厚さを薄くすると、磁気センサー300の出力信号の大きさは大きくなる、ここで、磁石サイドヨーク215の厚さをさらに薄く(例えば、0.05mmの珪素鋼板材1枚で形成する)すると、磁気センサー300の出力信号の波形は飽和する。したがって、磁石サイドヨーク215の厚さを、磁気センサー300の出力信号の波形が飽和しない程度の厚さ以上に設定することが好ましい。
【0025】
なお、磁石サイドヨーク215から漏れた磁束は、磁気センサー300を貫くだけでなく、軸受け240やケーシング110にも到達する。そして、軸受け240やケーシング110において渦電流損失を生じさせる。したがって、磁気センサー300として出来る限り高感度タイプを選択し、磁石サイドヨーク215の厚さを厚くして、軸受け240やケーシング110に到達する磁束を少なくすることが好ましい。なお、磁石サイドヨーク215を構成する個々の珪素鋼板(磁性体板)の両面に絶縁膜を設けるように構成してもよい。こうすれば、電磁コイル100A、100Bで発生した磁束に起因する、磁石サイドヨーク215における渦電流損失をさらに軽減することができる。ただし、絶縁膜を設けなくても良い。
【0026】
図5は、磁気センサー側と反対側の磁石サイドヨーク216近傍を拡大して示す説明図である。図5(A)〜(C)は、磁石サイドヨーク216として用いる珪素鋼板の枚数が異なっている。例えば、図5(A)に示す例は、珪素鋼板材の枚数が2枚(合計厚さ0.2mm)であり、図5(B)に示す例は4枚(合計厚さ0.4mm)であり、図5(C)に示す例は6枚(合計厚さ0.6mm)である。図3の説明で説明したように、磁石サイドヨーク216を形成する珪素鋼板材の枚数が多いと(磁石サイドヨーク216の厚さが厚いと)、永久磁石200の磁束について、磁石サイドヨーク216から漏れる磁束が少なくなる。磁石サイドヨーク216から漏れた磁束は、軸受け240やケーシング110に到達し、軸受け240やケーシング110において生じる渦電流損失の原因となる。渦電流損失は、ヒステリシス損と合わせて鉄損失の主な要素である。本実施例では、磁石サイドヨーク216側には、磁気センサー300が設けられていないので、磁石サイドヨーク216から漏れる磁束は、少なければ少ないほどよく、磁石サイドヨーク216は厚いほど好ましい。
【0027】
図6Aは、鉄損失の測定方法の一例を示す説明図である。ステップ1では、まず、標準モーター1010の損失特性を測定する。標準モーター1010の中心軸1230に、被測定モーター10を接続するためのカップリング1500を取り付ける。この状態で、あらかじめ定められた回転数Nで標準モーター1010を回転させて、標準モーター1010に加える電圧E1と電流I1を測定する。このときの回転状態は、いわゆる無負荷回転状態である。このときの標準モーター1010の第1の総損失P1allは、E1×I1となる。また、第1の総損失P1allは、機械損失P1mと銅損失P1cuと鉄損失P1feの和である。ここで、標準モーター1010の電磁コイルの電気抵抗をR1とすると、銅損失P1cuは、I12×R1で表される。
【0028】
ステップ2では、標準モーター1010に被測定モーター10のローター15のみを接続し、ステップ1と同一の回転数Nで標準モーター1010を回転させて、標準モーター1010に加える電圧E2と電流I2を測定する。このときの第2の総損失P2allはE2×I2となる。なお、この第2の総損失P2allは、第1の総損失P1allに被測定モーター10の機械損失P2mが加わったものである。すなわち、2の総損失P2allと第1の総損失P1allの差分(P2all−P1all)が、被測定モーター10の機械損失P2mとなる。
【0029】
ステップ3では、被測定モーター10のみをステップ1,2と同じ回転数Nで回転させて、被測定モーター10に加える電圧E3と電流I3を測定する。このときの被測定モーター10の総損失P3allは、E3×I3となる。また、総損失P3allは、機械損失P3mと銅損失P3cuと鉄損失P3feの和である。ここで、機械損失P3mは、ステップ2で測定した、機械損失P2mと同じ値である。また、銅損失P3cuは、被測定モーター10の電磁コイルの電気抵抗をR2とすると、I32×R2で示すことが出来る。したがって、被測定モーターの鉄損失は、(E3×I3−P3m−I32×R2)で算出することができる。
【0030】
図6Bは、磁石サイドヨーク216の厚さと被測定モーターの鉄損失の関係を示す説明図である。この鉄損失は、被測定モーター10内のローター20にある永久磁石200の回転数(電気角ω)により、磁束は軸受け240とケーシング110間に渦電流損失として生じる。図6Bでは、磁石サイドヨーク216を形成する珪素鋼板の枚数を変えることにより磁石サイドヨーク216の厚さを、0.2mm、0.4mm、0.6mm、0.8mm、1.0mmにしたものについて、鉄損失特性を示している。ここで1枚の珪素鋼板の厚みは0.1mmである。グラフから明らかなように、珪素鋼板材の枚数を増やすと、被測定モーターの鉄損失が少なくなっている。そして、珪素鋼板材の枚数を2枚から4枚に増やしたときの鉄損失の減少量よりも、珪素鋼板材の枚数を6枚から8枚に増やしたときの鉄損失の減少量の方が大きくなっている。ただし、珪素鋼板材の枚数を8枚から10枚に増やしても、鉄損失は大きく減少していない。この理由として、以下の理由が考えられる。鉄損失は、渦電流損失とヒステリシス損失とを含んでいる。鉄損失のうち、渦電流損失については、磁石サイドヨーク216の厚さを厚くすることにより、減らすことが可能であるが、ヒステリシス損失については、磁石サイドヨーク216の厚さを厚くしても減らすことが難しく、このヒステリシス損失が残っていると考えられる。以上の結果から、磁石サイドヨーク216の厚さを1mm程度にすることにより、鉄損失のうち、渦電流損失については、十分に少なくすることができる。
【0031】
図7は、磁石サイドヨーク厚さと磁石サイドヨーク表面の磁束密度の関係を示す説明図である。ここで「磁石サイドヨーク表面の磁束密度」とは、磁石サイドヨークの永久磁石とは反対側の表面の磁束密度を意味する。磁石サイドヨーク表面の磁束密度を、0.02テスラ(20ミリテスラ)以下とすれば、軸受け240やケーシング110に到達する磁束を少なくし、軸受け240やケーシング110における渦電流損失の発生を抑制し、鉄損失を少なくすることが出来る。磁石サイドヨーク表面の磁束密度が0.02テスラのときの磁石サイドヨーク216の厚さは、1.2mmである。図6における磁石サイドヨーク216の厚さと、渦電流損失の傾向から、磁石サイドヨーク216の厚さは、1.2mmであれば、渦電流損失は、ほとんど発生しないと考えられる。したがって、磁気センサーが設けられていない側の磁石サイドヨーク216の表面の磁束密度を0.02テスラ(20ミリテスラ)未満とすることにより、軸受け240やケーシング110に到達する磁束を少なくし、軸受け240やケーシング110における渦電流損失の発生を抑制し、鉄損失を少なくすることが出来る。
【0032】
また、磁気センサー300が設けられた側の磁石サイドヨーク215については、図3、4に示す結果において、珪素鋼板材の枚数が1枚(0.1mm)のとき磁気センサーの出力波形がほぼ飽和していることから、磁石サイドヨーク215の厚さは、0.1mmよりも厚い値であることが好ましい。このときの磁石サイドヨーク215の表面の磁束密度は、0.3テスラ(300ミリテスラ)以上である。また、磁石サイドヨーク215を増大させて、軸受け240やケーシング110における渦電流損失の発生を低減しようとすると、磁気センサー300における磁束密度が過度に低下してしまい、磁気センサー300の検出精度が悪化する。磁石サイドヨーク215の表面の磁束密度が0.1テスラ(100ミリテスラ)より小さくなると、磁気センサー300の検出精度が悪化する。したがって、磁石サイドヨーク215の厚さは0.8mm以下であることが好ましい。なお、磁気センサー300には、ホール素子からの信号の増幅回路と温度補償回路を備えたホールICを用いることが好ましい。この増幅回路で増幅ゲインの高い高感度品を用いることで、磁石サイドヨーク215から受ける渦電流損失を最小として成るようにすること好ましい。
【0033】
一般に、モーターでは、様々な強度に磁化された永久磁石を用いるので、磁石サイドヨークの好ましい厚みは、永久磁石の強度に応じて変化する。このような場合にも、第1の磁石サイドヨーク215の表面の磁束密度を20ミリテスラ未満とすることが好ましく、第2の磁石サイドヨーク216の表面の磁束密度を100ミリテスラ以上300ミリテスラ以下とすることが好ましい。
【0034】
以上、本実施例によれば、磁気センサー300が配置されない側の第2の磁石サイドヨーク216の表面の磁束密度を、磁気センサー300が配置される側の第1の磁石サイドヨーク215の表面の磁束密度よりも小さく設定しているので、第2の磁石サイドヨーク216からの磁束の漏れを少なくすることができる。その結果、磁気センサー300が配置されない側のケーシング110や軸受け240における渦電流損失に起因する鉄損失を少なくし、コアレスモーター10の効率を向上させることが出来る。
【0035】
上記構成の実現のため、第2の磁石サイドヨーク216の中心軸230に沿った方向の厚さを、第1の磁石サイドヨーク215の中心軸230に沿った方向の厚さよりも厚くすることが好ましい。この代わりに、第2の磁石サイドヨーク216を、第1の磁石サイドヨーク215よりも、比透磁率の大きな材料で形成してもよい。比透磁率の大きな材料は磁束を外部に漏らしにくい。したがって、磁石サイドヨーク216に比透磁率の大きな材料を用いることは、磁石サイドヨーク216の厚さを厚くすることと同様の効果がある。
【0036】
また、第1の磁石サイドヨーク215の表面の磁束密度を100ミリテスラ以上300ミリテスラ以下とし、第2の磁石サイドヨーク216の表面の磁束密度は20ミリテスラ未満とすることにより、第2の磁石サイドヨーク216側のケーシング110や軸受け240における渦電流損失、鉄損失を大きく減少することができる。また、第1の磁石サイドヨーク215を過度の厚くしていないため、第1のサイドヨークを通過した磁束を磁気センサー300で検知し、磁気センサー300の出力信号を、コアレスモーター10の制御に用いることが出来る。
【0037】
本実施例では、コアレスモーター10を用いて説明してきたが、モーターは、コアレスモーターに限られず、コア付モーターであってもよい。
【0038】
図8は、本発明の変形例によるモーター/発電機を利用した移動体の一例としての電動自転車(電動アシスト自転車)を示す説明図である。この自転車3300は、前輪にモーター3310が設けられており、サドルの下方のフレームに制御回路3320と充電池3330とが設けられている。モーター3310は、充電池3330からの電力を利用して前輪を駆動することによって、走行をアシストする。また、ブレーキ時にはモーター3310で回生された電力が充電池3330に充電される。制御回路3320は、モーターの駆動と回生とを制御する回路である。このモーター3310としては、上述した各種のコアレスモーター10を利用することが可能である。
【0039】
図9は、本発明の変形例によるモーターを利用したロボットの一例を示す説明図である。このロボット3400は、第1と第2のアーム3410,3420と、モーター3430とを有している。このモーター3430は、被駆動部材としての第2のアーム3420を水平回転させる際に使用される。このモーター3430としては、上述した各種のコアレスモーター10を利用することが可能である。
【0040】
図10は、本発明の変形例によるモーターを利用した双腕7軸ロボットの一例を示す説明図である。双腕7軸ロボット3450は、関節モーター3460と、把持部モーター3470と、アーム3480と、把持部3490と、を備える。関節モーター3460は、肩関節、肘関節、手首関節に相当する位置に配置されている。関節モーター3460は、アーム3480と把持部3490とを、3次元的に動作させるため、各関節につき2つのモーターを備えている。また、把持部モーター3470は、把持部3590を開閉し、把持部3490に物を掴ませる。双腕7軸ロボット3450において、関節モーター3460あるいは把持部モーター3470として、上述した各種のコアレスモーターを利用することが可能である。
【0041】
図11は、本発明の変形例によるモーターを利用した鉄道車両を示す説明図である。この鉄道車両3500は、電動モーター3510と、車輪3520とを有している。この電動モーター3510は、車輪3520を駆動する。さらに、電動モーター3510は、鉄道車両3500の制動時には発電機として利用され、電力が回生される。この電動モーター3510としては、上述した各種のコアレスモーター10を利用することができる。
【0042】
以上、いくつかの実施例に基づいて本発明の実施の形態について説明してきたが、上記した発明の実施の形態は、本発明の理解を容易にするためのものであり、本発明を限定するものではない。本発明は、その趣旨並びに特許請求の範囲を逸脱することなく、変更、改良され得るとともに、本発明にはその等価物が含まれることはもちろんである。
【符号の説明】
【0043】
10…コアレスモーター
15…ステーター
20…ローター
100、100A、100B…電磁コイル
110…ケーシング
110a…円筒形部分
115…コイルバックヨーク
200…永久磁石
215、216…磁石サイドヨーク
230…中心軸
236…磁石バックヨーク
239…貫通孔
240…軸受け
260…波バネ座金
300…磁気センサー
310…回路基板
1010…標準モーター
1230…中心軸
1500…カップリング
3300…自転車
3310…モーター
3320…制御回路
3330…充電池
3400…ロボット
3410…第1のアーム
3420…第2のアーム
3430…モーター
3450…双腕7軸ロボット
3460…関節モーター
3470…把持部モーター
3480…アーム
3490…把持部
3500…鉄道車両
3510…電動モーター
3520…車輪
3590…把持部
【特許請求の範囲】
【請求項1】
電気機械装置であって、
中心軸と、前記中心軸の外周に沿った第1の円筒面上に配置された永久磁石と、前記永久磁石の中心軸方向両端部に配置された第1、第2の磁石サイドヨークと、を有するローターと、
前記永久磁石の外周に沿った第2の円筒面上に配置された電磁コイルと、前記第1の磁石サイドヨークを挟んで前記永久磁石とは反対側に配置された磁気センサーと、を有するステーターと、
を備え、
前記第1、第2の磁石サイドヨークは、前記磁気センサーが配置されない側の前記第2の磁石サイドヨークの前記永久磁石と反対側の表面の磁束密度が、前記第1の磁石サイドヨークの前記永久磁石と反対側の表面の磁束密度よりも小さくなるように構成されている、電気機械装置。
【請求項2】
請求項1に記載の電気機械装置において、
前記第1、第2の磁石サイドヨークは、前記第2の磁石サイドヨークの前記中心軸に沿った方向の厚さが、前記第1の磁石サイドヨークの前記中心軸に沿った方向の厚さよりも厚くなるように構成されている、電気機械装置。
【請求項3】
請求項1または2に記載の電気機械装置において、
前記第2の磁石サイドヨークは、前記第1の磁石サイドヨークよりも、比透磁率の大きな材料で形成されている、電気機械装置。
【請求項4】
請求項1〜3のいずれか一項に記載の電気機械装置において、
前記第1の磁石サイドヨークの前記永久磁石と反対側の表面の磁束密度は100ミリテスラ以上300ミリテスラ以下であり、前記第2の磁石サイドヨークの前記永久磁石と反対側の表面の磁束密度は20ミリテスラ未満である、電気機械装置。
【請求項5】
請求項1〜4のいずれか一項に記載の電気機械装置を備えるロボット。
【請求項6】
請求項1〜4のいずれか一項に記載の電気機械装置を備える移動体。
【請求項1】
電気機械装置であって、
中心軸と、前記中心軸の外周に沿った第1の円筒面上に配置された永久磁石と、前記永久磁石の中心軸方向両端部に配置された第1、第2の磁石サイドヨークと、を有するローターと、
前記永久磁石の外周に沿った第2の円筒面上に配置された電磁コイルと、前記第1の磁石サイドヨークを挟んで前記永久磁石とは反対側に配置された磁気センサーと、を有するステーターと、
を備え、
前記第1、第2の磁石サイドヨークは、前記磁気センサーが配置されない側の前記第2の磁石サイドヨークの前記永久磁石と反対側の表面の磁束密度が、前記第1の磁石サイドヨークの前記永久磁石と反対側の表面の磁束密度よりも小さくなるように構成されている、電気機械装置。
【請求項2】
請求項1に記載の電気機械装置において、
前記第1、第2の磁石サイドヨークは、前記第2の磁石サイドヨークの前記中心軸に沿った方向の厚さが、前記第1の磁石サイドヨークの前記中心軸に沿った方向の厚さよりも厚くなるように構成されている、電気機械装置。
【請求項3】
請求項1または2に記載の電気機械装置において、
前記第2の磁石サイドヨークは、前記第1の磁石サイドヨークよりも、比透磁率の大きな材料で形成されている、電気機械装置。
【請求項4】
請求項1〜3のいずれか一項に記載の電気機械装置において、
前記第1の磁石サイドヨークの前記永久磁石と反対側の表面の磁束密度は100ミリテスラ以上300ミリテスラ以下であり、前記第2の磁石サイドヨークの前記永久磁石と反対側の表面の磁束密度は20ミリテスラ未満である、電気機械装置。
【請求項5】
請求項1〜4のいずれか一項に記載の電気機械装置を備えるロボット。
【請求項6】
請求項1〜4のいずれか一項に記載の電気機械装置を備える移動体。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6A】
【図6B】
【図7】
【図8】
【図9】
【図10】
【図11】
【図2】
【図3】
【図4】
【図5】
【図6A】
【図6B】
【図7】
【図8】
【図9】
【図10】
【図11】
【公開番号】特開2013−17341(P2013−17341A)
【公開日】平成25年1月24日(2013.1.24)
【国際特許分類】
【出願番号】特願2011−149644(P2011−149644)
【出願日】平成23年7月6日(2011.7.6)
【出願人】(000002369)セイコーエプソン株式会社 (51,324)
【Fターム(参考)】
【公開日】平成25年1月24日(2013.1.24)
【国際特許分類】
【出願日】平成23年7月6日(2011.7.6)
【出願人】(000002369)セイコーエプソン株式会社 (51,324)
【Fターム(参考)】
[ Back to top ]