
電気機械装置、移動体、及びロボット
【課題】ラジアルギャップ型の電気機械装置を効率よく駆動する。
【解決手段】回転軸230を中心として回転するラジアルギャップ型の電気機械装置10であって、個々の永久磁石200の磁化の方向が回転軸230を中心とする放射または中心方向であり、回転軸230を中心とする円周に沿って並べられた複数の永久磁石200と、複数の永久磁石200と対向すると共に、永久磁石200の外側の第1の円筒面に沿って並べられた第1相用(A相)の複数の第1の電磁コイル100Aと、複数の永久磁石200と対向すると共に、第1の電磁コイル100Aの第1の円筒面よりも外側の第2の円筒面に沿って並べられた第2相用(B相)の複数の第2の電磁コイル100Bと、を備え、第1と第2の電磁コイルは、それぞれの誘起電圧が同じ値になり、かつ、それぞれの巻線抵抗が同じ値となるように構成されていることを特徴とする電気機械装置。
【解決手段】回転軸230を中心として回転するラジアルギャップ型の電気機械装置10であって、個々の永久磁石200の磁化の方向が回転軸230を中心とする放射または中心方向であり、回転軸230を中心とする円周に沿って並べられた複数の永久磁石200と、複数の永久磁石200と対向すると共に、永久磁石200の外側の第1の円筒面に沿って並べられた第1相用(A相)の複数の第1の電磁コイル100Aと、複数の永久磁石200と対向すると共に、第1の電磁コイル100Aの第1の円筒面よりも外側の第2の円筒面に沿って並べられた第2相用(B相)の複数の第2の電磁コイル100Bと、を備え、第1と第2の電磁コイルは、それぞれの誘起電圧が同じ値になり、かつ、それぞれの巻線抵抗が同じ値となるように構成されていることを特徴とする電気機械装置。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、2相以上のコイルを有するラジアルギャップ型の電気機械装置に関する。
【背景技術】
【0002】
電気機械装置(電動モーター)における磁石と電磁コイルの配置の構造には、アキシャルギャップ型とラジアルギャップ型とがある。アキシャルギャップ型(例えば特許文献1)の場合、電磁コイルが複数相あっても、各電磁コイルと磁石との間の距離を同じにすることができるため、それぞれの相の電磁コイルの特性を同じにすることは容易である。これに対し、ラジアルギャップ型の場合、永久磁石の磁束を有効に使おうとして2つの電磁コイルを重ねて配置すると、各電磁コイルと磁石との距離を同じにすることは困難なため、それぞれの相の電磁コイルの特性を同じにすることは容易ではなかった。そのため、2つの電磁コイルの駆動力のバランスを取ることが難しく、ラジアルギャップ型の電気機械装置を効率よく駆動することが難しかった。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2008−22639号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
本発明は、ラジアル構造の電気機械装置を効率よく駆動することを目的とする。
【課題を解決するための手段】
【0005】
本発明は、上述の課題の少なくとも一部を解決するためになされたものであり、以下の形態又は適用例として実現することが可能である。
【0006】
[適用例1]
回転軸を中心として回転するラジアルギャップ型の電気機械装置であって、個々の永久磁石の磁化の方向が前記回転軸を中心とする放射または中心方向であり、前記回転軸を中心とする円周に沿って並べられた複数の永久磁石と、前記複数の永久磁石と対向すると共に、前記永久磁石の外側の第1の円筒面に沿って並べられた第1相用の複数の第1の電磁コイルと、前記複数の永久磁石と対向すると共に、前記第1の電磁コイルの前記第1の円筒面よりも外側の第2の円筒面に沿って並べられた第2相用の複数の第2の電磁コイルと、を備え、前記第1と第2の電磁コイルは、それぞれの誘起電圧が同じ値になり、かつ、それぞれの巻線抵抗が同じ値となるように構成されていることを特徴とする電気機械装置。
この適用例によれば、第1の電磁コイルによる駆動力と第2の電磁コイルによる駆動力のバランスを取ることが出来るため、電気機械装置を滑らかに駆動でき、効率を向上させることが出来る。
【0007】
[適用例2]
適用例1に記載の電気機械装置において、前記第1の電磁コイルの巻数をna、磁路長(磁界中の電線長)をla、線材断面積をSa、前記永久磁石から受ける平均磁束密度をBa、とし、前記第2の電磁コイルの巻数をnb、磁路長をlb、線材断面積をSb、前記永久磁石から受ける平均磁束密度をBb、とするときに、前記第1、第2の電磁コイルは、前記第1の円筒面上にそれぞれ投影された形状が同じ大きさに巻かれており(la=lb)、かつ、na/nb=Bb/Ba及び、na/nb=Sa/Sbを満たすように形成されている、電気機械装置。
この適用例に記載した条件を満たすことにより、第1の電磁コイルによる駆動力と第2の電磁コイルによる駆動力のバランスを取ることが出来る。
【0008】
[適用例3]
適用例1または適用例2に記載の電気機械装置において、さらに、前記第1、第2の電磁コイルを駆動するための駆動信号の進角を調整し、誘起電圧波形と駆動電流波形の位相を合わせる進角調整部を前記第1、第2の電磁コイル毎に備える、電気機械装置。
この適用例によれば、第1、第2の電磁コイルのインダクタンスに起因する駆動電流波形の遅れを修正し、第1の電磁コイルによる駆動力と第2の電磁コイルによる駆動力のさらなるバランスを取ることが出来る。
【0009】
[適用例4]
適用例3に記載の電気機械装置において、さらに、前記電気機械装置の回転数を検知する回転数検知部を備え、前記進角調整部は、前記各電磁コイルの進角調整値を前記回転数に基づいて定める、電気機械装置。
各電磁コイルの進角調整値は、電磁コイルのインダクタンスと、回転数と、トルクと、に依存する。この適用例によれば、回転数に基づいて第1、第2の電磁コイルを駆動するための駆動信号を別個に進角調整することができるので、回転数に起因する第1の電磁コイルによる駆動力と第2の電磁コイルによる駆動力のバランスの乱れを修正することができる。
【0010】
[適用例5]
適用例3または適用例4に記載の電気機械装置において、前記進角調整部は、前記各電磁コイルの進角調整値を前記電気機械装置に対するトルクに基づいて定める、電気機械装置。
電気機械装置では、トルクに応じて電磁コイルに電流が流れる。また、電磁コイルの進角調整値は、電磁コイルのインダクタンスと、回転数と、トルクと、に依存する。この適用例によれば、トルクに基づいて第1、第2の電磁コイルを駆動するための駆動信号を別個に進角調整することができるので、電磁コイルに流れる電流に起因する第1の電磁コイルによる駆動力と第2の電磁コイルによる駆動力のバランスの乱れを修正することができる。
【0011】
[適用例6]
適用例3〜5のいずれか一つに記載の電気機械装置において、前記進角調整部は、前記第2の電磁コイルの進角を前記第1の電磁コイルの進角よりも進める、電気機械装置。
永久磁石から遠い方の電磁コイルは永久磁石から受ける磁束密度が低いため、誘起電圧の大きさを同じ大きさにしようとすると巻数が多くなる。巻数が多くなるとインダクタンスが大きくなるため、永久磁石から遠い方の電磁コイルは、永久磁石から近い方の電磁コイルに比べ波形が遅れる。この適用例によれば第2の電磁コイルの進角を進めることによりこの遅れをカバーすることができる。
【0012】
[適用例7]
回転軸を中心として回転するラジアルギャップ型の電気機械装置であって、個々の永久磁石の磁化の方向が前記回転軸を中心とする放射または中心方向であり、前記回転軸を中心とする円周に沿って並べられた複数の永久磁石と、前記複数の永久磁石と対向すると共に、前記永久磁石の外側の第1の円筒面に沿って並べられた第1の電磁コイルと、前記複数の永久磁石と対向すると共に、前記第1の電磁コイルの外側の第2の円筒面に沿って並べられた第2の電磁コイルと、を備え、前記第1の電磁コイルと前記第2の電磁コイルについて、その巻線損失が理想設計値と同じ値となるように、前記第1、第2の電磁コイルの巻数と、線材の太さとが調整されている、電気機械装置。
この適用例によれば、第1の電磁コイルと前記第2の電磁コイルの巻線損失は、理想設計値と同じ値となるように第1、第2の電磁コイルの巻数、線材の太さが調整されているので、第1の電磁コイルと第2の電磁コイルの、巻線損失のバランスと同時に、駆動力のバランスを取ることが出来る。そのため、電気機械装置を滑らかに駆動でき、効率を向上させることが出来る。
【0013】
[適用例8]
回転軸を中心として回転するラジアルギャップ型の電気機械装置であって、個々の永久磁石の磁化の方向が前記回転軸を中心とする放射または中心方向であり、前記回転軸を中心とする円周に沿って並べられた複数の永久磁石と、前記複数の永久磁石と対向すると共に、前記永久磁石の外側の第1の円筒面に沿って並べられた第1の電磁コイルと、前記複数の永久磁石と対向すると共に、前記第1の電磁コイルの外側の第2の円筒面に沿って並べられた第2の電磁コイルと、を備え、さらに、前記第1、第2の電磁コイルの誘起電圧の比に対応して前記第1と第2の電磁コイルの駆動電圧を、PWM制御のデューティを変えることで調整する電圧調整部を備える、電気機械装置。
この適用例によれば、第1の電磁コイルによる駆動力と第2の電磁コイルによる駆動力のバランスを取ることが出来るため、電気機械装置を滑らかに駆動でき、効率を向上させることが出来る。
【0014】
[適用例9]
適用例1〜8のいずれか一つに記載の電気機械装置を有する移動体。
この適用例によれば、移動、加速、減速時における動作が滑らかとなり、乗り心地や効率のよい移動体を実現できる。
【0015】
[適用例10]
適用例1〜8のいずれか一つに記載の電気機械装置を有するロボット。
この適用例によれば、ロボットの動作がスムーズとなり、ギクシャクしないロボットを実現できる。
【0016】
なお、本発明は、種々の形態で実現することが可能であり、例えば、モーターや発電装置などの電気機械装置、それを用いたアクチュエーターやロボット、移動体等の形態で実現することができる。
【図面の簡単な説明】
【0017】
【図1】第1の実施例の電動モーターの構成を示す説明図である。
【図2】電磁コイルを展開し外側から見たときの形状を模式的に示す説明図である。
【図3】電磁コイルと永久磁石の関係を拡大して示す説明図である。
【図4A】電磁コイル100の巻線数を同じにして線材径を変えたときの一例を示す説明図である。
【図4B】図4Aに対し、さらに、巻数を調整したときの一例を示す説明図である。
【図5】電動モーターの制御部を示す説明図である。
【図6】モーター駆動回路の一例を示す説明図である。
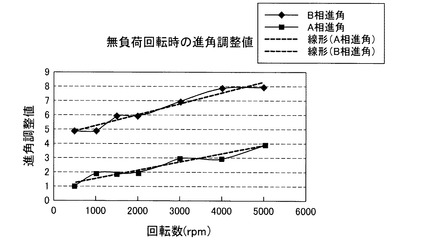
【図7A】無負荷回転時における回転数と各相の進角調整値の関係の一例を示す説明図である。
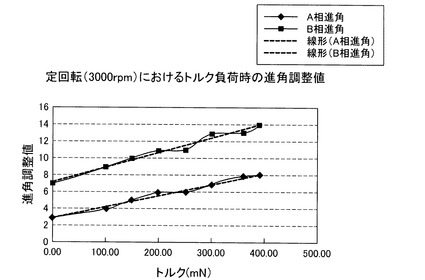
【図7B】定回転(3000rpm)における負荷トルクと各相の進角調整値の関係の一例を示す説明図である。
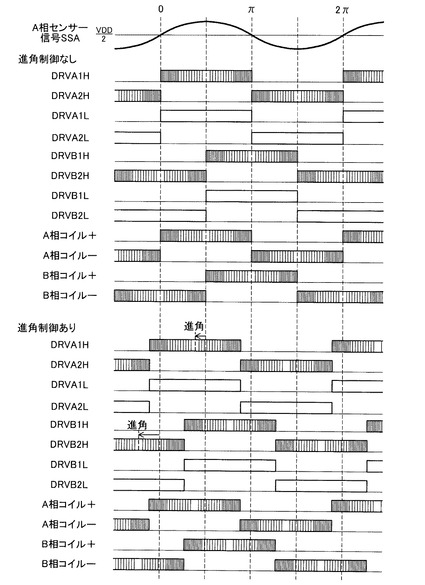
【図8】A相センサー信号SSAと、A相のモーター駆動信号DRVA1H〜DRVA2Lと、B相のモーター駆動信号DRVB1H〜DRVB2Lと、A相コイル、B相コイルの端子電圧、のタイミングチャートを示す説明図である。
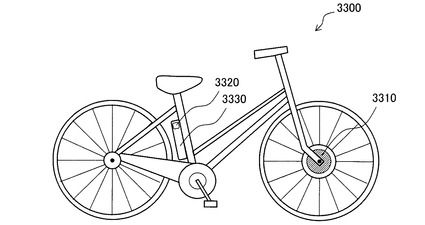
【図9】本発明の変形例によるモーター/発電機を利用した移動体の一例としての電動自転車(電動アシスト自転車)を示す説明図である。
【図10】本発明の変形例によるモーターを利用したロボットの一例を示す説明図である。
【図11】本発明の変形例によるモーターを利用した鉄道車両を示す説明図である。
【発明を実施するための形態】
【0018】
A.第1の実施例:
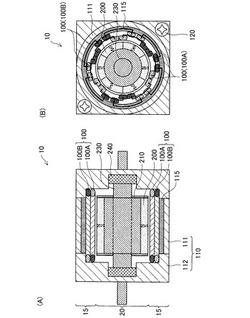
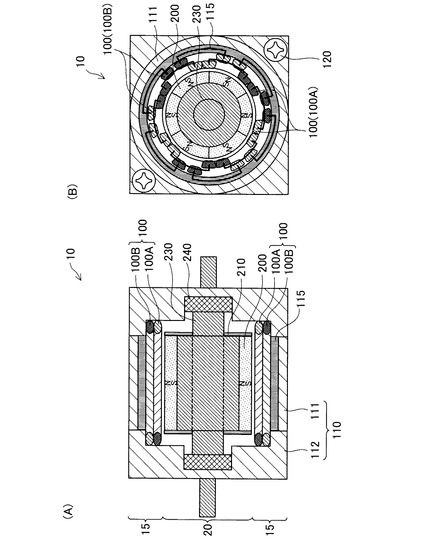
図1は、第1の実施例の電動モーターの構成を示す説明図である。図1(A)は、回転軸と平行な面で切ったときの断面を示し、図1(B)は、回転軸と垂直な面で切ったときの断面を示している。電動モーター10は、ラジアルギャップ構造のインナーローター型モーターであり、ステーター15と、ローター20と、を備える。ステーター15は外側に配置されており、ステーター15の内側には、略円筒状の空間が形成されており、この略円筒状の空間には、略円筒状のローター20が配置されている。
【0019】
ステーター15は、電磁コイル100と、コイルバックヨーク115と、を備える。ローター20は、永久磁石200と、サイドヨーク210と、回転軸230と、を備える。回転軸230は、ローター20の中心軸であり、回転軸230の外周に永久磁石200が配置されている。永久磁石200は、回転軸230の中心から外部に向かう径方向(放射方向)に沿って磁化されている。永久磁石200の回転軸230と平行な方向の両側には、サイドヨーク210が配置されている。サイドヨーク210は、磁性体材料で形成されており、永久磁石200の回転軸230と平行な方向への磁束の漏れを抑制する。ローター20は、回転軸230によって、ケーシング110の軸受け240で支持されている。ステーター15は、ケーシング110によって固定されている。
【0020】
ケーシング110は、内側が略円筒形の空間になっており、その内周に沿ってコイルバックヨーク115、及び複数の電磁コイル100が配置されている。なお、本実施例では、電磁コイル100は、内側に配置される電磁コイル100Aと外側に配置される電磁コイル100Bとを備えている。なお、本実施例では、電磁コイル100Aと電磁コイル100Bを区別する必要がない場合には、単に「電磁コイル100」と呼ぶ。電磁コイル100は、コアレス(空芯)である。また、電磁コイル100と永久磁石200とは、ローター20とステーター15の対向する円筒面に対向して配置されている。電磁コイル100の放射方向外側には、コイルバックヨーク115が設けられている。コイルバックヨーク115は、電磁コイル100のコイルエンドと重なっていないことが好ましい。磁界中の電線に電流が流れると、磁界及び電流の向きの両方に直角の方向にローレンツ力が働く。ここで、コイルエンドとは、電磁コイル100を形成する電線の向きが、ローター20の回転方向と略平行である領域をいう。コイルエンドに働くローレンツ力は、ローター20の回転方向と直角の方向であり、ローター20の回転力に寄与しない。すなわち、コイルエンドに磁束が通ると、永久磁石200の磁束を回転力に有効に使うことができない。コイルバックヨーク115は、磁束を集める機能を有している。本実施例では、コイルバックヨーク115は、電磁コイル100のコイルエンドと重なっていないため、電磁コイル100のコイルエンドを除いた部分に永久磁石200からの磁束を集中させることが出来るため、永久磁石200の磁束をローター20の回転力に有効に使うことが出来る。
【0021】
ケーシング110は、回転軸230と平行な円筒形状部分(側面部)111と、円筒形状部分111の両端に配置された、回転軸230と垂直な端面部分112とを備える。2つの端面部分112は、円筒形状部分111を挟んで配置されており、2つの端面部分112と、円筒形状部分111は、取り付けネジ120により固定されている。円筒形状部分111は、コイルバックヨーク115と重なっている。円筒形状部分111は、コイルバックヨーク115に生じた熱を放熱するために、熱伝導性の高い材料で形成されている。端面部分112は、熱伝導性の高い材料で形成されていてもよく、また、樹脂で形成されていてもよい。
【0022】
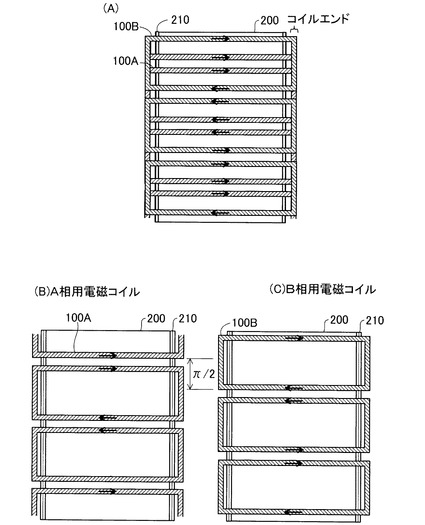
図2は、電磁コイルを展開し、外側から見たときの形状を模式的に示す説明図である。図2(A)は、永久磁石200とサイドヨーク210に加えて電磁コイル100A、100Bの両方を記載している。図2(B)は、永久磁石200とサイドヨーク210に加えて電磁コイル100Aを記載し、電磁コイル100Bを記載していない。図2(C)は、永久磁石200とサイドヨーク210に加えて電磁コイル100Bを記載し、電磁コイル100Aを記載していない。図2に示すように、電磁コイル100A、100Bは、円筒平面上で、それぞれ略長方形に巻かれている。ここで、電磁コイル100Aと、100Bとは、電気角でπ/2ずれるように配置されている。電磁コイル100Aと100Bは、同じ円筒面に形成されると、コイルエンド同士が干渉する。そのため、電磁コイル100Aと100Bは、永久磁石200からの距離が異なる円筒面に形成される。電磁コイル100Aと100Bは、永久磁石200からの距離が異なることから、電磁コイル100A、100Bが永久磁石200から受ける磁束の強さ(磁束密度)が異なることになり、同じ仕様(線材径、巻数)で電磁コイル100Aと電磁コイル100Bを構成するとそれぞれの駆動力のバランスが崩れることになる。
【0023】
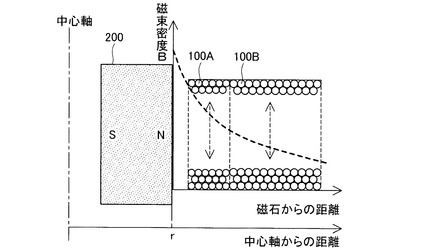
図3は、電磁コイルと永久磁石の関係を拡大して示す説明図である。なお、図1(B)に示すように、電磁コイル100Aと100Bは、円周方向にずれているが、図3では、比較のため、円周方向にずれていないものとして記載している。また、永久磁石200からの距離に対する磁束密度の特性を図中に重ねて示している。電磁コイル100Bの方が、電磁コイル100Aよりも永久磁石200から離れているため、平均の磁束密度は小さい。したがって、同じ誘起電圧を発生させるためには、電磁コイル100Bの巻数を電磁コイルAの巻数よりも多くする必要がある。一方、電磁コイル100Bの巻数を大きくすると、同じ線材径では電磁コイル100Bの巻線抵抗の方が電磁コイル100Aの巻線抵抗よりも大きくなる。したがって、同じ駆動力とするために電磁コイルの駆動電流を等しくすると、電磁コイル100Aと電磁コイル100Bの巻線損失のバランスがくずれ、その発熱により駆動力のバランスを取ることが難しい。
【0024】
本実施例では、電磁コイル100Aと電磁コイル100Bを以下のように構成することにより、電磁コイル100Aによる駆動力と電磁コイル100Bによる駆動力のバランスを維持する。
【0025】
電磁コイル100に生じる誘起電圧の大きさEは、E=B×L×vで表される。ここで、Bは電磁コイル100が永久磁石200から受ける磁束密度、Lは電磁コイルの磁界中の電線長、vは、永久磁石200と電磁コイル100の相対速度を示す。ここで磁界中の電線長Lは、電磁コイル100のうちのコイルエンドを除いた部分の一巻きの長さLnに巻数nを掛けた値(Ln×n)に等しい。永久磁石200と電磁コイル100の相対速度vは、回転中心から電磁コイル100までの長さrにローターの角速度ωを掛けた値(r×ω)に等しい。したがって、電磁コイル100Aに生じる誘起電圧Eaは、Ea=Ba×La×ra×ωで表される。ここでBaは、電磁コイル100Aが受ける平均磁束密度、Laは電磁コイル100Aの磁界中の平均電線長で、raは回転中心から電磁コイル100Aまでの平均の長さである。なお、平均磁束密度Baを用いずに、電磁コイル100Aを形成する1巻き毎に誘起電圧を算出し、1巻き毎の誘起電圧の総和をEa=Σ(Ban×Lan×ran×ω)で算出してもよい。ここで、磁束密度Banは電磁コイル100Aの一巻きが受ける磁束密度であり、Lanは電磁コイル100Aの一巻きの磁界中の電線長であり、ranは回転中心から電磁コイル100Aの一巻きまでの長さである。同様に、電磁コイル100Bに生じる誘起電圧Ebは、Eb=Bb×Lb×rb×ω=Σ(Bbn×Lbn×rbn×ω)で示すことが出来る。したがって、電磁コイル100Aに生じる誘起電圧Eaの大きさと、電磁コイル100Bに生じる誘起電圧Ebを等しくするには、Ba×La×ra×ω=Bb×Lb×ra×ω、ra≒rbとすると、La/Lb=Bb/Baを満たせばよい。ここで、電磁コイル100Aと100Bの巻数をna、nbとすると、La=na×Lan、Lb=nb×Lbnとなり、電磁コイル100Aと100Bの一巻きの磁界中の電線長LanとLbnとが同じ値であれば、電磁コイル100Aと100Bの巻数na、nbが、na/nb=Bb/Baを満たせばよい。
【0026】
次に、電磁コイル100Aと100Bの電気抵抗(巻線抵抗)について考える。電磁コイル100の巻線抵抗Rは、R=ρ×l/Sで示される。ここで、ρは電磁コイル100を形成する線材の比抵抗、lは電磁コイル100を形成する線材の線材長、Sは、電磁コイル100を形成する線材の断面積である。なお線材長lは、コイルエンドを含んでおり、線材長l>磁界中の電線長Lである。電磁コイル100Aの電気抵抗Raは、Ra=ρ×la/Saで示され、電磁コイル100Bの電気抵抗Rbは、Rb=ρ×lb/Sbで示される。電磁コイル100Aと100Bの電気抵抗が同じであるためには、ρ×la/Sa=ρ×lb/Sb、すなわち、la/lb=Sa/Sbを満たせばよい。なお、コイルエンドが磁界中の電線長Lに対し十分に小さければ、線材長l≒磁界中の電線長Lとなり、La/Lb=Sa/Sbとなる。ここで、電磁コイル100Aと100Bの巻数をna、nbとすると、La=na×Lan、Lb=nb×Lbnとなり、電磁コイル100Aと100Bの一巻きの磁界中の電線長LanとLbnとが同じ値であれば、電磁コイル100Aと100Bの巻数na、nbが、na/nb=Sa/Sbを満たせばよい。
【0027】
以上、本実施例によれば、電磁コイル100A、100Bの誘起電圧はそれぞれ同じ値となり、電磁コイル100A、100Bの電気抵抗がそれぞれ同じ値となるように、構成されているので、電磁コイル100Aと電磁コイル100Bそれぞれによる駆動力のバランスを取ることが出来る。そのため、電動モーター10を滑らかに駆動でき、効率を向上させることが出来る。
【0028】
B.第2の実施例:
第1の実施例では、電磁コイル100Aと100Bの誘起電圧と、巻線抵抗とがそれぞれ同じ値となるようにしたが、第2の実施例では、電磁コイル100の巻線損失が理想値とほぼ同じ値になるようにしている。すなわち、電磁コイル100の駆動電圧Vで駆動するとき、誘起電圧Eとの間には、V=E+IRの関係がある。ここでIは、電磁コイルに流れる電流であり、Rは、電磁コイル100の電気抵抗(巻線抵抗)である。巻線損失PはP=R×I2で表される。本実施例は、この巻線損失を理想値とほぼ同じにするものである。
【0029】
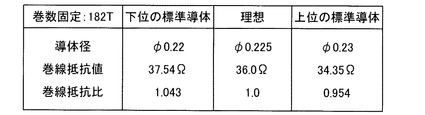
図4Aは、電磁コイル100の巻数を同じにして線材径を変えたときの一例を示す説明図である。理想的には、電磁コイル100の線材径(導体径)を0.225mmで、巻数182T(ターン)のとき電気抵抗は36.0Ωとなるとすると、この線材径は標準品として販売されていないため、線材径が0.22mmまたは0.23mmのものを用いる必要がある。かかる場合、同じ巻数とすると、線材径が0.23mmの電気抵抗は34.35Ωであり、線材径が0.22mmの電気抵抗は37.54Ωであり、理想値に対して約5%ずれている。
【0030】
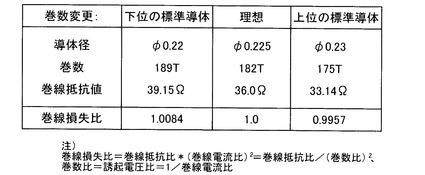
図4Bは、図4Aに対し、さらに、巻数を調整したときの一例を示す説明図である。本実施例の場合、電磁コイル100の設計において、巻数と電気抵抗の設計値に対する理想線材径が一般市販品の線材径とずれた場合、さらに巻数を調整することで巻線損失を設計理想値に近い値とすることが可能であることを示す。
設計上のコイル断面積を理想(線材径0.225mm、巻数182T)と同等とすると、この例では、線材径0.23mmのとき電磁コイルの巻数を175巻きと少なくし、線材径0.22mmのとき電磁コイルの巻数を189巻きと多くしている。その結果、電磁コイルの電気抵抗は、それぞれ33.14Ωと、39.15Ωとなり、それぞれの巻線損失の設計値とのずれを次に求める。
【0031】
ここで、電磁コイルの巻線損失は、
(巻線損失)=(巻線抵抗)×(巻線電流)2
で示される。巻線抵抗は電磁コイルの電気抵抗と同意である。上式において、2種の線材について、巻線損失、巻線抵抗、巻線電流を各要素の比で表すと、
(巻線損失比)=(巻線抵抗比)×(巻線電流比)2
となる。また、電動モーター10の出力を一定とすると、誘起電圧をm倍にすると、巻線電流は、1/mでよい。そして、誘起電圧は、巻数に比例する。したがって、
(巻数比)=(誘起電圧比)=1/(巻線電流比)
となる。すなわち、
(巻線損失比)=(巻線抵抗比)/(巻数比)2
となる。
【0032】
図4Bの示すデータを用いて、巻線損失比(理想値に対する比)を算出すると、電磁コイルの巻線損失比は、線材径0.23mmで0.9957であり、線材径0.22mmで1.0084となり、ほぼ1%の範囲内にすることが可能である。すなわち、実際の設計において理想の線材径がない場合でも、理想に近い値の線材径を有する線材を使用することで、電磁コイル100Aと電磁コイル100Bの巻線損失を、理想値とほぼ同じ値にすることができる。このように、電磁コイル100A、100Bを形成すれば、電磁コイル100Aと電磁コイル100Bそれぞれによる駆動力のバランスを取ることが出来るため、電動モーター10を滑らかに駆動でき、効率を向上させることが出来る。
【0033】
C.第3の実施例:
第1、第2の実施例では、電磁コイル100の構成(巻数、線材の径)を調整し、電磁コイル100Aと電磁コイル100Bそれぞれによる駆動力のバランスを取るように構成している。しかし、電磁コイル100A、100Bの巻数が異なると、電磁コイル100A、100Bのインダクタンスが異なる。外側に配置される電磁コイル100Bが永久磁石200から受ける磁束密度の方が小さい。そのため、電磁コイル100Aに生じる誘起電圧と、同じ大きさの誘起電圧を電磁コイル100Bに生じさせるためには、電磁コイル100Bの巻数nbを電磁コイル100Aの巻数naよりも大きくする必要がある。そして、一般に、巻数が多いほどインダクタンスが大きくなり、誘起電圧に対して電流が遅れる。第3の実施例では、さらに進角制御を行い、電磁コイル100Aと電磁コイル100Bそれぞれによる駆動力のバランスを取る。
【0034】
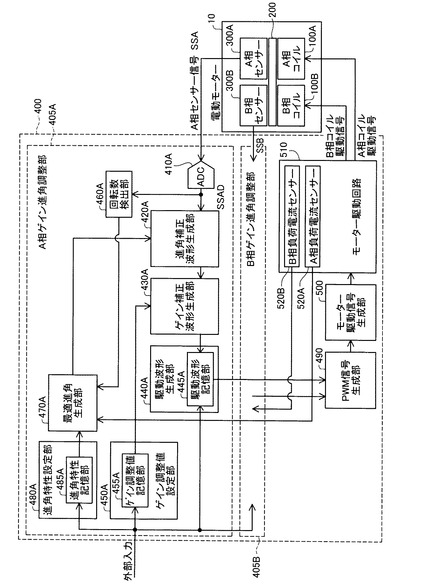
図5は、電動モーターの制御部を示す説明図である。制御部400は、A相ゲイン進角調整部405Aと、B相ゲイン進角調整部405Bと、PWM信号生成部490と、モーター駆動信号生成部500と、モーター駆動回路510と、を備える。電動モーター10は、図1で説明した構成に加えて、A相センサー300Aと、B相センサー300Bとを備える。なお、図5では、電磁コイル100A、100Bと、永久磁石200と、A相センサー300Aと、B相センサー300B、のみを記載している。A相センサー300Aは、永久磁石200の電気角を検知するためのセンサーであり、例えばホール素子を用いた磁気センサーである。A相センサーは、電気角2πを周期としたA相センサー信号SSAを生成する。なお、B相センサー300Bも同様である。なお、A相センサー300AとB相センサー300Bとは、それぞれが生成するA相センサー信号SSAと、B相センサー信号SSBとが電気角でnπ(nは整数)ずれる位置を除いた配置とする。A相センサー信号SSAと、B相センサー信号SSBとが電気角でnπずれていると、A相センサー信号SSAと、B相センサー信号SSBとを用いて、電動モーター10のローター20(図1)の回転方向を検知することができない。すなわち、A相センサー信号SSAと、B相センサー信号SSBとは電気角でπ/2ずれている。
【0035】
A相ゲイン進角調整部405Aと、B相ゲイン進角調整部405Bとは同じ構成であるので、A相ゲイン進角調整部405Aを例にとり説明する。A相ゲイン進角調整部405Aは、アナログ−デジタルーコンバーター410A(以下、「ADコンバーター410A」と呼ぶ。)と、進角補正波形生成部420Aと、ゲイン補正波形生成部430Aと、駆動波形生成部440Aと、ゲイン調整値設定部450Aと、回転数検出部460Aと、最適進角生成部470Aと、進角特性設定部480Aと、を備える。駆動波形生成部440Aは、駆動波形記憶部445Aを備えている。駆動波形記憶部445Aは、誘起電圧波形に応じた駆動波形パターンを格納している。進角特性設定部480Aは、進角特性記憶部485Aを備えている。進角特性記憶部485Aは、回転数に対する進角特性、及びトルクに対する進角特性を記憶したテーブルを格納している。ゲイン調整値設定部450Aは、ゲイン調整値記憶部455Aを備えている。ゲイン調整値記憶部455Aは、電磁コイル100Aと100Bに発生する誘起電圧の差を補正するゲイン調整値を記憶している。これらのテーブルは、あらかじめ実験により求めておく。モーター駆動回路510は、A相負荷電流センサー520Aと、B相負荷電流センサー520Bとを備える。
【0036】
ADコンバーター410Aは、アナログ信号であるA相センサー300AからのA相センサー信号SSAをデジタル信号SSADに変換する。回転数検出部460Aは、例えば、所定の期間内のA相センサー信号の振幅の1/2の電圧をクロスする期間をクロックでカウントすることにより、半波長の周期を算出し、ローター20(図1)の回転数を検出することができる。進角特性設定部480Aは、回転数に対する進角特性、及びトルクに対する進角特性を保持している。最適進角生成部470Aは、ローター20の回転数と、A相負荷電流センサー520Aからの電磁コイル100Aに流れる電流量(トルクに比例)によって、進角特性設定部480Aから最適な進角調整値を読み出し、進角補正波形生成部420Aに設定する。電磁コイル100Aに流れる電流量を考慮するのは、この電流量は、電動モーター10にかかる負荷トルクに依存するからである。進角補正波形生成部420Aは、最適な進角調整値に基づき、デジタル信号SSADを進角調整し、進角補正波形を生成する。なお、進角を調整すると、電磁コイル100Aに流れる電流量が変化するため、本制御は、フィードバック制御となる。
【0037】
ゲイン調整値設定部450Aは、電磁コイル100Aと100Bに発生する誘起電圧の差を補正するゲイン調整値を保持している。ゲイン補正波形生成部430Aは、ゲイン調整値設定部450Aからのゲイン調整値と、進角補正波形と、を用いて、ゲイン調整された進角補正波形を生成する。駆動波形生成部440Aは、ゲイン調整された進角補正波形を用い、駆動波形記憶部445Aに格納された駆動波形パターンを参照して、電磁コイル100Aを駆動するための駆動波形を生成する。
【0038】
PWM信号生成部490は、駆動波形生成部440A、440Bからの駆動波形を用いて、電磁コイル100A、100Bを駆動するためのPWM信号を生成する。モーター駆動信号生成部500は、電磁コイル100A、100Bに流す電流をスイッチングするためのモーター駆動信号DRVA1H〜DRVB2Lを生成する。
【0039】
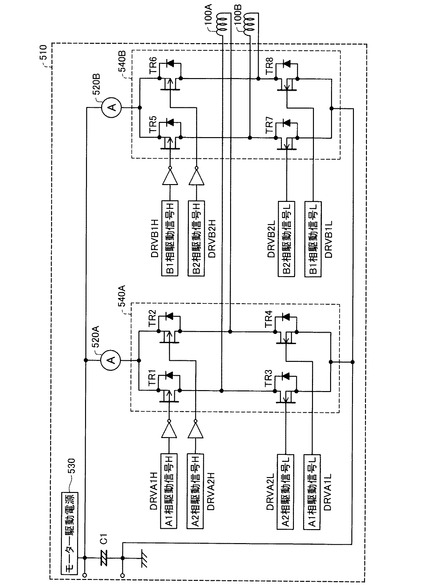
図6は、モーター駆動回路の一例を示す説明図である。モーター駆動回路510は、モーター駆動電源530と、平滑コンデンサーC1と、負荷電流センサー520A、520Bと、H型ブリッジ回路540A、540Bとを備える。平滑コンデンサーC1は、電源−グランド間に配置されている。A相用の負荷電流センサー520AとH型ブリッジ回路540Aは、電源―グランド間に直列に接続されている。H型ブリッジ回路540Aは、4つのトランジスタTr1〜Tr4を有している。各トランジスタTr1〜Tr4のドレインに電磁コイル100Aが接続されており、H型ブリッジ回路540Aの対角の2つのトランジスタ(例えばトランジスタTr1とTr4、あるいは、トランジスタTr2とTr3)がオンすることにより、電磁コイル100Aに電流が流れる。 トランジスタTr1〜Tr4のオンオフは、モーター駆動信号生成部500からのモーター駆動信号DRVA1H〜DRVA2Lにより実行される。B相用の負荷電流センサー520Bと、H型ブリッジ回路540B、についても同様である。
【0040】
図7Aは、無負荷回転時における回転数と各相の進角調整値の関係の一例を示す説明図である。ここで、破線は、調整値を直線近似したときの線である。図7Aから明らかなように、永久磁石200(図1)に近い方に配置された電磁コイル100Aよりも、永久磁石200に遠い方に配置された電磁コイル100Bの進角を大きくすることが好ましい。電磁コイル100Bの方が、永久磁石200から受ける磁束密度が小さいため、巻数を大きくしなければ電磁コイル100Aが発生させる誘起電圧と同じ大きさの誘起電圧を発生させることが出来ない。ここで、電磁コイル100Bの巻数を多くすると、インダクタンスが大きくなるため、誘起電圧波形に対する駆動電流波形がより遅れる。したがって、電磁コイル100Bの進角を電磁コイル100Aの進角よりも大きくすることが好ましい。また、ローター20の回転数が大きくなるほど進角を大きくすることが好ましい。ローターの回転数が大きくなると、電磁コイルを駆動する電気的周波数は速くなり、電気角である進角値は相対的に大きくなる。この図7Aは、無負荷回転時における進角調整値を示すテーブルを図に表したものであるが、進角特性記憶部485Aは、様々な負荷トルクにおける回転数と進角調整値との関係を示すテーブルを備えていることが好ましい。
【0041】
図7Bは、定回転(3000rpm)における負荷トルクと各相の進角調整値の関係の一例を示す説明図である。ここで、破線は、調整値を直線近似したときの線である。図7Bから明らかなように、永久磁石200(図1)に近い方に配置された電磁コイル100Aよりも、永久磁石200に遠い方に配置された電磁コイル100Bの進角を大きくすることが好ましい。また、電動モーター10への負荷トルクが大きくなるほど進角を大きくすることが好ましい。この図7Bは、定回転時における進角調整値を示すテーブルを図に表したものであるが、進角特性記憶部485Aは、様々な回転数における負荷トルクと進角調整値との関係を示すテーブルを備えていることが好ましい。また、テーブル以外に、トルクと回転数を引数とした関数から進角調整値を算出するように構成してもよい。
【0042】
図8は、A相センサー信号SSAと、A相モーター駆動信号DRVA1H〜DRVA2Lと、B相モーター駆動信号DRVB1H〜DRVB2Lと、A相コイル、B相コイルの端子電圧、のタイミングチャートを示す説明図である。図8において、上段が進角制御なし、下段が進角制御ありを示している。図6のモーター駆動回路における電源側のトランジスタTr1、Tr2、Tr5、Tr6(図6)をスイッチングするモーター駆動信号DRVA1H、DRVA2H、DRVB1H、DRVB2Hは、活性期間に1未満のデューティ比を有するPWM駆動波形であるが、グランド側のトランジスタTr3、Tr4、Tr7、Tr8(図6)をスイッチングするモーター駆動信号DRVA1L、DRVA2L、DRVB1L、DRVB2Lは、活性期間においてデューティ比が1となる矩形波である。
【0043】
進角制御ありのタイミングチャートでは、A相側のモーター駆動信号DRVA1H、DRVA2H、DRVA1L、DRVA2Lを駆動するタイミングが、回転数及びトルクに応じて早められており、B相側のモーター駆動信号DRVB1H、DRVB2H、DRVB1L、DRVB2Lを駆動するタイミングは、さらに、インダクタンスの違いにより早められている。その結果、電磁コイル100Aと電磁コイル100Bそれぞれによる駆動力のバランスを取ることができる。
【0044】
以上のように、本実施例では、A相用駆動信号とB相用駆動信号それぞれの最適進角生成部(図5においてA相用最適進角生成部470A、B相用最適進角生成部は図示せず)や進角特性設定部(図5においてA相用進角特性設定部480A、B相用進角特性設定部は図示せず)を独立して備え、また、ゲイン調整値設定部(図5においてA相用ゲイン調整値設定部450A、B相用ゲイン調整値設定部は図示せず)を独立して備えるので、相コイル毎に進角や駆動ゲインを調整することができる。その結果、電磁コイル100Aと電磁コイル100Bの、インダクタンスに起因する電流の遅れ及び誘起電圧の差に起因する電流のアンバランスをカバーし、それぞれによる駆動力のバランスを取ることができる。その結果、電動モーター10を滑らかに駆動でき、電動モーター10の効率を向上させることが出来る。
【0045】
なお、第1、第2の実施例の構成に加えて第3の実施例の構成を採用しても良く、第1、第2の実施例の構成を採用せず、第3の実施例のみを採用してもよい。また、進角調整、駆動ゲイン調整の両方を行っても良く、いずれか一方のみを行っても良い。
【0046】
図9は、本発明の変形例によるモーター/発電機を利用した移動体の一例としての電動自転車(電動アシスト自転車)を示す説明図である。この自転車3300は、前輪にモーター3310が設けられており、サドルの下方のフレームに制御回路3320と充電池3330とが設けられている。モーター3310は、充電池3330からの電力を利用して前輪を駆動することによって、走行をアシストする。また、ブレーキ時にはモーター3310で回生された電力が充電池3330に充電される。制御回路3320は、モーターの駆動と回生とを制御する回路である。このモーター3310としては、上述した各種の電動モーターを利用することが可能である。その結果、移動、加速、減速時における動作が滑らかとなり、乗り心地や効率のよい移動体を実現できる。
【0047】
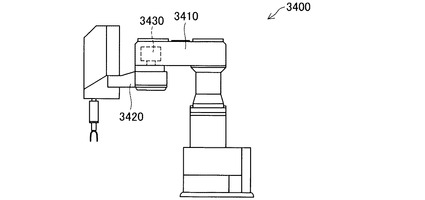
図10は、本発明の変形例によるモーターを利用したロボットの一例を示す説明図である。このロボット3400は、第1と第2のアーム3410,3420と、モーター3430とを有している。このモーター3430は、被駆動部材としての第2のアーム3420を水平回転させる際に使用される。このモーター3430としては、上述した各種の電動モーターを利用することが可能である。ロボット3400の動作がスムーズとなり、ギクシャクしないロボット3400を実現できる。
【0048】
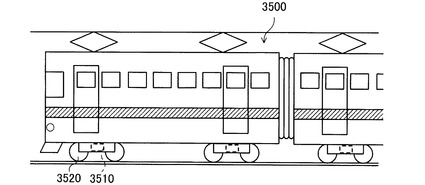
図11は、本発明の変形例によるモーターを利用した鉄道車両を示す説明図である。この鉄道車両3500は、モーター3510と、車輪3520とを有している。このモーター3510は、車輪3520を駆動する。さらに、モーター3510は、鉄道車両3500の制動時には発電機として利用され、電力が回生される。このモーター3510としては、上述した各種の電動モーターを利用することができる。その結果、移動、加速、減速時における動作が滑らかとなり、乗り心地や効率のよい移動体を実現できる。
【0049】
以上、いくつかの実施例に基づいて本発明の実施の形態について説明してきたが、上記した発明の実施の形態は、本発明の理解を容易にするためのものであり、本発明を限定するものではない。本発明は、その趣旨並びに特許請求の範囲を逸脱することなく、変更、改良され得るとともに、本発明にはその等価物が含まれることはもちろんである。
【符号の説明】
【0050】
10…電動モーター
15…ステーター
20…ローター
100、100A、100B…電磁コイル
110…ケーシング
111…円筒形状部分
112…端面部分
115…コイルバックヨーク
120…ネジ
200…永久磁石
210…サイドヨーク
230…回転軸
240…軸受け
300A、300B…センサー
400…制御部
410A…アナログ−デジタル−コンバーター(ADコンバーター)
420A…進角補正波形生成部
430A…ゲイン補正波形生成部
440A…駆動波形生成部
445A…駆動波形記憶部
450A…ゲイン調整値設定部
455A…ゲイン調整値記憶部
460A…回転数検出部
470A…最適進角生成部
480A…進角特性設定部
485A…進角特性記憶部
490…PWM信号生成部
500…モーター駆動信号生成部
510…モーター駆動回路
520A、520B…負荷電流センサー
530…モーター駆動電源
540A、540B…H型ブリッジ回路
3300…自転車
3310…モーター
3320…制御回路
3330…充電池
3400…ロボット
3410…第1のアーム
3420…第2のアーム
3430…モーター
3500…鉄道車両
3510…モーター
3520…車輪
Ba、Bb…平均磁束密度
Ban、Bbn…磁束密度
C1…平滑コンデンサー
DRVA1HからDRVB2L…モーター駆動信号
Ea、Eb…誘起電圧
La、Lb・・・磁界中の電線長
la、lb・・・電磁コイルの線材長
Lan、Lbn・・・一巻きの磁界中の電線長
na、nb…巻数
ra、rb・・・回転中心から電磁コイルまでの平均の長さ
ran、rbn・・・回転中心から電磁コイル一巻きまでの長さ
Ra、Rb…電気抵抗(巻線抵抗)
Sa、Sb・・・電磁コイルの線材断面積
SSA、SSB…センサー信号
SSAD…デジタル信号
Tr1〜Tr8…トランジスタ
【技術分野】
【0001】
この発明は、2相以上のコイルを有するラジアルギャップ型の電気機械装置に関する。
【背景技術】
【0002】
電気機械装置(電動モーター)における磁石と電磁コイルの配置の構造には、アキシャルギャップ型とラジアルギャップ型とがある。アキシャルギャップ型(例えば特許文献1)の場合、電磁コイルが複数相あっても、各電磁コイルと磁石との間の距離を同じにすることができるため、それぞれの相の電磁コイルの特性を同じにすることは容易である。これに対し、ラジアルギャップ型の場合、永久磁石の磁束を有効に使おうとして2つの電磁コイルを重ねて配置すると、各電磁コイルと磁石との距離を同じにすることは困難なため、それぞれの相の電磁コイルの特性を同じにすることは容易ではなかった。そのため、2つの電磁コイルの駆動力のバランスを取ることが難しく、ラジアルギャップ型の電気機械装置を効率よく駆動することが難しかった。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2008−22639号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
本発明は、ラジアル構造の電気機械装置を効率よく駆動することを目的とする。
【課題を解決するための手段】
【0005】
本発明は、上述の課題の少なくとも一部を解決するためになされたものであり、以下の形態又は適用例として実現することが可能である。
【0006】
[適用例1]
回転軸を中心として回転するラジアルギャップ型の電気機械装置であって、個々の永久磁石の磁化の方向が前記回転軸を中心とする放射または中心方向であり、前記回転軸を中心とする円周に沿って並べられた複数の永久磁石と、前記複数の永久磁石と対向すると共に、前記永久磁石の外側の第1の円筒面に沿って並べられた第1相用の複数の第1の電磁コイルと、前記複数の永久磁石と対向すると共に、前記第1の電磁コイルの前記第1の円筒面よりも外側の第2の円筒面に沿って並べられた第2相用の複数の第2の電磁コイルと、を備え、前記第1と第2の電磁コイルは、それぞれの誘起電圧が同じ値になり、かつ、それぞれの巻線抵抗が同じ値となるように構成されていることを特徴とする電気機械装置。
この適用例によれば、第1の電磁コイルによる駆動力と第2の電磁コイルによる駆動力のバランスを取ることが出来るため、電気機械装置を滑らかに駆動でき、効率を向上させることが出来る。
【0007】
[適用例2]
適用例1に記載の電気機械装置において、前記第1の電磁コイルの巻数をna、磁路長(磁界中の電線長)をla、線材断面積をSa、前記永久磁石から受ける平均磁束密度をBa、とし、前記第2の電磁コイルの巻数をnb、磁路長をlb、線材断面積をSb、前記永久磁石から受ける平均磁束密度をBb、とするときに、前記第1、第2の電磁コイルは、前記第1の円筒面上にそれぞれ投影された形状が同じ大きさに巻かれており(la=lb)、かつ、na/nb=Bb/Ba及び、na/nb=Sa/Sbを満たすように形成されている、電気機械装置。
この適用例に記載した条件を満たすことにより、第1の電磁コイルによる駆動力と第2の電磁コイルによる駆動力のバランスを取ることが出来る。
【0008】
[適用例3]
適用例1または適用例2に記載の電気機械装置において、さらに、前記第1、第2の電磁コイルを駆動するための駆動信号の進角を調整し、誘起電圧波形と駆動電流波形の位相を合わせる進角調整部を前記第1、第2の電磁コイル毎に備える、電気機械装置。
この適用例によれば、第1、第2の電磁コイルのインダクタンスに起因する駆動電流波形の遅れを修正し、第1の電磁コイルによる駆動力と第2の電磁コイルによる駆動力のさらなるバランスを取ることが出来る。
【0009】
[適用例4]
適用例3に記載の電気機械装置において、さらに、前記電気機械装置の回転数を検知する回転数検知部を備え、前記進角調整部は、前記各電磁コイルの進角調整値を前記回転数に基づいて定める、電気機械装置。
各電磁コイルの進角調整値は、電磁コイルのインダクタンスと、回転数と、トルクと、に依存する。この適用例によれば、回転数に基づいて第1、第2の電磁コイルを駆動するための駆動信号を別個に進角調整することができるので、回転数に起因する第1の電磁コイルによる駆動力と第2の電磁コイルによる駆動力のバランスの乱れを修正することができる。
【0010】
[適用例5]
適用例3または適用例4に記載の電気機械装置において、前記進角調整部は、前記各電磁コイルの進角調整値を前記電気機械装置に対するトルクに基づいて定める、電気機械装置。
電気機械装置では、トルクに応じて電磁コイルに電流が流れる。また、電磁コイルの進角調整値は、電磁コイルのインダクタンスと、回転数と、トルクと、に依存する。この適用例によれば、トルクに基づいて第1、第2の電磁コイルを駆動するための駆動信号を別個に進角調整することができるので、電磁コイルに流れる電流に起因する第1の電磁コイルによる駆動力と第2の電磁コイルによる駆動力のバランスの乱れを修正することができる。
【0011】
[適用例6]
適用例3〜5のいずれか一つに記載の電気機械装置において、前記進角調整部は、前記第2の電磁コイルの進角を前記第1の電磁コイルの進角よりも進める、電気機械装置。
永久磁石から遠い方の電磁コイルは永久磁石から受ける磁束密度が低いため、誘起電圧の大きさを同じ大きさにしようとすると巻数が多くなる。巻数が多くなるとインダクタンスが大きくなるため、永久磁石から遠い方の電磁コイルは、永久磁石から近い方の電磁コイルに比べ波形が遅れる。この適用例によれば第2の電磁コイルの進角を進めることによりこの遅れをカバーすることができる。
【0012】
[適用例7]
回転軸を中心として回転するラジアルギャップ型の電気機械装置であって、個々の永久磁石の磁化の方向が前記回転軸を中心とする放射または中心方向であり、前記回転軸を中心とする円周に沿って並べられた複数の永久磁石と、前記複数の永久磁石と対向すると共に、前記永久磁石の外側の第1の円筒面に沿って並べられた第1の電磁コイルと、前記複数の永久磁石と対向すると共に、前記第1の電磁コイルの外側の第2の円筒面に沿って並べられた第2の電磁コイルと、を備え、前記第1の電磁コイルと前記第2の電磁コイルについて、その巻線損失が理想設計値と同じ値となるように、前記第1、第2の電磁コイルの巻数と、線材の太さとが調整されている、電気機械装置。
この適用例によれば、第1の電磁コイルと前記第2の電磁コイルの巻線損失は、理想設計値と同じ値となるように第1、第2の電磁コイルの巻数、線材の太さが調整されているので、第1の電磁コイルと第2の電磁コイルの、巻線損失のバランスと同時に、駆動力のバランスを取ることが出来る。そのため、電気機械装置を滑らかに駆動でき、効率を向上させることが出来る。
【0013】
[適用例8]
回転軸を中心として回転するラジアルギャップ型の電気機械装置であって、個々の永久磁石の磁化の方向が前記回転軸を中心とする放射または中心方向であり、前記回転軸を中心とする円周に沿って並べられた複数の永久磁石と、前記複数の永久磁石と対向すると共に、前記永久磁石の外側の第1の円筒面に沿って並べられた第1の電磁コイルと、前記複数の永久磁石と対向すると共に、前記第1の電磁コイルの外側の第2の円筒面に沿って並べられた第2の電磁コイルと、を備え、さらに、前記第1、第2の電磁コイルの誘起電圧の比に対応して前記第1と第2の電磁コイルの駆動電圧を、PWM制御のデューティを変えることで調整する電圧調整部を備える、電気機械装置。
この適用例によれば、第1の電磁コイルによる駆動力と第2の電磁コイルによる駆動力のバランスを取ることが出来るため、電気機械装置を滑らかに駆動でき、効率を向上させることが出来る。
【0014】
[適用例9]
適用例1〜8のいずれか一つに記載の電気機械装置を有する移動体。
この適用例によれば、移動、加速、減速時における動作が滑らかとなり、乗り心地や効率のよい移動体を実現できる。
【0015】
[適用例10]
適用例1〜8のいずれか一つに記載の電気機械装置を有するロボット。
この適用例によれば、ロボットの動作がスムーズとなり、ギクシャクしないロボットを実現できる。
【0016】
なお、本発明は、種々の形態で実現することが可能であり、例えば、モーターや発電装置などの電気機械装置、それを用いたアクチュエーターやロボット、移動体等の形態で実現することができる。
【図面の簡単な説明】
【0017】
【図1】第1の実施例の電動モーターの構成を示す説明図である。
【図2】電磁コイルを展開し外側から見たときの形状を模式的に示す説明図である。
【図3】電磁コイルと永久磁石の関係を拡大して示す説明図である。
【図4A】電磁コイル100の巻線数を同じにして線材径を変えたときの一例を示す説明図である。
【図4B】図4Aに対し、さらに、巻数を調整したときの一例を示す説明図である。
【図5】電動モーターの制御部を示す説明図である。
【図6】モーター駆動回路の一例を示す説明図である。
【図7A】無負荷回転時における回転数と各相の進角調整値の関係の一例を示す説明図である。
【図7B】定回転(3000rpm)における負荷トルクと各相の進角調整値の関係の一例を示す説明図である。
【図8】A相センサー信号SSAと、A相のモーター駆動信号DRVA1H〜DRVA2Lと、B相のモーター駆動信号DRVB1H〜DRVB2Lと、A相コイル、B相コイルの端子電圧、のタイミングチャートを示す説明図である。
【図9】本発明の変形例によるモーター/発電機を利用した移動体の一例としての電動自転車(電動アシスト自転車)を示す説明図である。
【図10】本発明の変形例によるモーターを利用したロボットの一例を示す説明図である。
【図11】本発明の変形例によるモーターを利用した鉄道車両を示す説明図である。
【発明を実施するための形態】
【0018】
A.第1の実施例:
図1は、第1の実施例の電動モーターの構成を示す説明図である。図1(A)は、回転軸と平行な面で切ったときの断面を示し、図1(B)は、回転軸と垂直な面で切ったときの断面を示している。電動モーター10は、ラジアルギャップ構造のインナーローター型モーターであり、ステーター15と、ローター20と、を備える。ステーター15は外側に配置されており、ステーター15の内側には、略円筒状の空間が形成されており、この略円筒状の空間には、略円筒状のローター20が配置されている。
【0019】
ステーター15は、電磁コイル100と、コイルバックヨーク115と、を備える。ローター20は、永久磁石200と、サイドヨーク210と、回転軸230と、を備える。回転軸230は、ローター20の中心軸であり、回転軸230の外周に永久磁石200が配置されている。永久磁石200は、回転軸230の中心から外部に向かう径方向(放射方向)に沿って磁化されている。永久磁石200の回転軸230と平行な方向の両側には、サイドヨーク210が配置されている。サイドヨーク210は、磁性体材料で形成されており、永久磁石200の回転軸230と平行な方向への磁束の漏れを抑制する。ローター20は、回転軸230によって、ケーシング110の軸受け240で支持されている。ステーター15は、ケーシング110によって固定されている。
【0020】
ケーシング110は、内側が略円筒形の空間になっており、その内周に沿ってコイルバックヨーク115、及び複数の電磁コイル100が配置されている。なお、本実施例では、電磁コイル100は、内側に配置される電磁コイル100Aと外側に配置される電磁コイル100Bとを備えている。なお、本実施例では、電磁コイル100Aと電磁コイル100Bを区別する必要がない場合には、単に「電磁コイル100」と呼ぶ。電磁コイル100は、コアレス(空芯)である。また、電磁コイル100と永久磁石200とは、ローター20とステーター15の対向する円筒面に対向して配置されている。電磁コイル100の放射方向外側には、コイルバックヨーク115が設けられている。コイルバックヨーク115は、電磁コイル100のコイルエンドと重なっていないことが好ましい。磁界中の電線に電流が流れると、磁界及び電流の向きの両方に直角の方向にローレンツ力が働く。ここで、コイルエンドとは、電磁コイル100を形成する電線の向きが、ローター20の回転方向と略平行である領域をいう。コイルエンドに働くローレンツ力は、ローター20の回転方向と直角の方向であり、ローター20の回転力に寄与しない。すなわち、コイルエンドに磁束が通ると、永久磁石200の磁束を回転力に有効に使うことができない。コイルバックヨーク115は、磁束を集める機能を有している。本実施例では、コイルバックヨーク115は、電磁コイル100のコイルエンドと重なっていないため、電磁コイル100のコイルエンドを除いた部分に永久磁石200からの磁束を集中させることが出来るため、永久磁石200の磁束をローター20の回転力に有効に使うことが出来る。
【0021】
ケーシング110は、回転軸230と平行な円筒形状部分(側面部)111と、円筒形状部分111の両端に配置された、回転軸230と垂直な端面部分112とを備える。2つの端面部分112は、円筒形状部分111を挟んで配置されており、2つの端面部分112と、円筒形状部分111は、取り付けネジ120により固定されている。円筒形状部分111は、コイルバックヨーク115と重なっている。円筒形状部分111は、コイルバックヨーク115に生じた熱を放熱するために、熱伝導性の高い材料で形成されている。端面部分112は、熱伝導性の高い材料で形成されていてもよく、また、樹脂で形成されていてもよい。
【0022】
図2は、電磁コイルを展開し、外側から見たときの形状を模式的に示す説明図である。図2(A)は、永久磁石200とサイドヨーク210に加えて電磁コイル100A、100Bの両方を記載している。図2(B)は、永久磁石200とサイドヨーク210に加えて電磁コイル100Aを記載し、電磁コイル100Bを記載していない。図2(C)は、永久磁石200とサイドヨーク210に加えて電磁コイル100Bを記載し、電磁コイル100Aを記載していない。図2に示すように、電磁コイル100A、100Bは、円筒平面上で、それぞれ略長方形に巻かれている。ここで、電磁コイル100Aと、100Bとは、電気角でπ/2ずれるように配置されている。電磁コイル100Aと100Bは、同じ円筒面に形成されると、コイルエンド同士が干渉する。そのため、電磁コイル100Aと100Bは、永久磁石200からの距離が異なる円筒面に形成される。電磁コイル100Aと100Bは、永久磁石200からの距離が異なることから、電磁コイル100A、100Bが永久磁石200から受ける磁束の強さ(磁束密度)が異なることになり、同じ仕様(線材径、巻数)で電磁コイル100Aと電磁コイル100Bを構成するとそれぞれの駆動力のバランスが崩れることになる。
【0023】
図3は、電磁コイルと永久磁石の関係を拡大して示す説明図である。なお、図1(B)に示すように、電磁コイル100Aと100Bは、円周方向にずれているが、図3では、比較のため、円周方向にずれていないものとして記載している。また、永久磁石200からの距離に対する磁束密度の特性を図中に重ねて示している。電磁コイル100Bの方が、電磁コイル100Aよりも永久磁石200から離れているため、平均の磁束密度は小さい。したがって、同じ誘起電圧を発生させるためには、電磁コイル100Bの巻数を電磁コイルAの巻数よりも多くする必要がある。一方、電磁コイル100Bの巻数を大きくすると、同じ線材径では電磁コイル100Bの巻線抵抗の方が電磁コイル100Aの巻線抵抗よりも大きくなる。したがって、同じ駆動力とするために電磁コイルの駆動電流を等しくすると、電磁コイル100Aと電磁コイル100Bの巻線損失のバランスがくずれ、その発熱により駆動力のバランスを取ることが難しい。
【0024】
本実施例では、電磁コイル100Aと電磁コイル100Bを以下のように構成することにより、電磁コイル100Aによる駆動力と電磁コイル100Bによる駆動力のバランスを維持する。
【0025】
電磁コイル100に生じる誘起電圧の大きさEは、E=B×L×vで表される。ここで、Bは電磁コイル100が永久磁石200から受ける磁束密度、Lは電磁コイルの磁界中の電線長、vは、永久磁石200と電磁コイル100の相対速度を示す。ここで磁界中の電線長Lは、電磁コイル100のうちのコイルエンドを除いた部分の一巻きの長さLnに巻数nを掛けた値(Ln×n)に等しい。永久磁石200と電磁コイル100の相対速度vは、回転中心から電磁コイル100までの長さrにローターの角速度ωを掛けた値(r×ω)に等しい。したがって、電磁コイル100Aに生じる誘起電圧Eaは、Ea=Ba×La×ra×ωで表される。ここでBaは、電磁コイル100Aが受ける平均磁束密度、Laは電磁コイル100Aの磁界中の平均電線長で、raは回転中心から電磁コイル100Aまでの平均の長さである。なお、平均磁束密度Baを用いずに、電磁コイル100Aを形成する1巻き毎に誘起電圧を算出し、1巻き毎の誘起電圧の総和をEa=Σ(Ban×Lan×ran×ω)で算出してもよい。ここで、磁束密度Banは電磁コイル100Aの一巻きが受ける磁束密度であり、Lanは電磁コイル100Aの一巻きの磁界中の電線長であり、ranは回転中心から電磁コイル100Aの一巻きまでの長さである。同様に、電磁コイル100Bに生じる誘起電圧Ebは、Eb=Bb×Lb×rb×ω=Σ(Bbn×Lbn×rbn×ω)で示すことが出来る。したがって、電磁コイル100Aに生じる誘起電圧Eaの大きさと、電磁コイル100Bに生じる誘起電圧Ebを等しくするには、Ba×La×ra×ω=Bb×Lb×ra×ω、ra≒rbとすると、La/Lb=Bb/Baを満たせばよい。ここで、電磁コイル100Aと100Bの巻数をna、nbとすると、La=na×Lan、Lb=nb×Lbnとなり、電磁コイル100Aと100Bの一巻きの磁界中の電線長LanとLbnとが同じ値であれば、電磁コイル100Aと100Bの巻数na、nbが、na/nb=Bb/Baを満たせばよい。
【0026】
次に、電磁コイル100Aと100Bの電気抵抗(巻線抵抗)について考える。電磁コイル100の巻線抵抗Rは、R=ρ×l/Sで示される。ここで、ρは電磁コイル100を形成する線材の比抵抗、lは電磁コイル100を形成する線材の線材長、Sは、電磁コイル100を形成する線材の断面積である。なお線材長lは、コイルエンドを含んでおり、線材長l>磁界中の電線長Lである。電磁コイル100Aの電気抵抗Raは、Ra=ρ×la/Saで示され、電磁コイル100Bの電気抵抗Rbは、Rb=ρ×lb/Sbで示される。電磁コイル100Aと100Bの電気抵抗が同じであるためには、ρ×la/Sa=ρ×lb/Sb、すなわち、la/lb=Sa/Sbを満たせばよい。なお、コイルエンドが磁界中の電線長Lに対し十分に小さければ、線材長l≒磁界中の電線長Lとなり、La/Lb=Sa/Sbとなる。ここで、電磁コイル100Aと100Bの巻数をna、nbとすると、La=na×Lan、Lb=nb×Lbnとなり、電磁コイル100Aと100Bの一巻きの磁界中の電線長LanとLbnとが同じ値であれば、電磁コイル100Aと100Bの巻数na、nbが、na/nb=Sa/Sbを満たせばよい。
【0027】
以上、本実施例によれば、電磁コイル100A、100Bの誘起電圧はそれぞれ同じ値となり、電磁コイル100A、100Bの電気抵抗がそれぞれ同じ値となるように、構成されているので、電磁コイル100Aと電磁コイル100Bそれぞれによる駆動力のバランスを取ることが出来る。そのため、電動モーター10を滑らかに駆動でき、効率を向上させることが出来る。
【0028】
B.第2の実施例:
第1の実施例では、電磁コイル100Aと100Bの誘起電圧と、巻線抵抗とがそれぞれ同じ値となるようにしたが、第2の実施例では、電磁コイル100の巻線損失が理想値とほぼ同じ値になるようにしている。すなわち、電磁コイル100の駆動電圧Vで駆動するとき、誘起電圧Eとの間には、V=E+IRの関係がある。ここでIは、電磁コイルに流れる電流であり、Rは、電磁コイル100の電気抵抗(巻線抵抗)である。巻線損失PはP=R×I2で表される。本実施例は、この巻線損失を理想値とほぼ同じにするものである。
【0029】
図4Aは、電磁コイル100の巻数を同じにして線材径を変えたときの一例を示す説明図である。理想的には、電磁コイル100の線材径(導体径)を0.225mmで、巻数182T(ターン)のとき電気抵抗は36.0Ωとなるとすると、この線材径は標準品として販売されていないため、線材径が0.22mmまたは0.23mmのものを用いる必要がある。かかる場合、同じ巻数とすると、線材径が0.23mmの電気抵抗は34.35Ωであり、線材径が0.22mmの電気抵抗は37.54Ωであり、理想値に対して約5%ずれている。
【0030】
図4Bは、図4Aに対し、さらに、巻数を調整したときの一例を示す説明図である。本実施例の場合、電磁コイル100の設計において、巻数と電気抵抗の設計値に対する理想線材径が一般市販品の線材径とずれた場合、さらに巻数を調整することで巻線損失を設計理想値に近い値とすることが可能であることを示す。
設計上のコイル断面積を理想(線材径0.225mm、巻数182T)と同等とすると、この例では、線材径0.23mmのとき電磁コイルの巻数を175巻きと少なくし、線材径0.22mmのとき電磁コイルの巻数を189巻きと多くしている。その結果、電磁コイルの電気抵抗は、それぞれ33.14Ωと、39.15Ωとなり、それぞれの巻線損失の設計値とのずれを次に求める。
【0031】
ここで、電磁コイルの巻線損失は、
(巻線損失)=(巻線抵抗)×(巻線電流)2
で示される。巻線抵抗は電磁コイルの電気抵抗と同意である。上式において、2種の線材について、巻線損失、巻線抵抗、巻線電流を各要素の比で表すと、
(巻線損失比)=(巻線抵抗比)×(巻線電流比)2
となる。また、電動モーター10の出力を一定とすると、誘起電圧をm倍にすると、巻線電流は、1/mでよい。そして、誘起電圧は、巻数に比例する。したがって、
(巻数比)=(誘起電圧比)=1/(巻線電流比)
となる。すなわち、
(巻線損失比)=(巻線抵抗比)/(巻数比)2
となる。
【0032】
図4Bの示すデータを用いて、巻線損失比(理想値に対する比)を算出すると、電磁コイルの巻線損失比は、線材径0.23mmで0.9957であり、線材径0.22mmで1.0084となり、ほぼ1%の範囲内にすることが可能である。すなわち、実際の設計において理想の線材径がない場合でも、理想に近い値の線材径を有する線材を使用することで、電磁コイル100Aと電磁コイル100Bの巻線損失を、理想値とほぼ同じ値にすることができる。このように、電磁コイル100A、100Bを形成すれば、電磁コイル100Aと電磁コイル100Bそれぞれによる駆動力のバランスを取ることが出来るため、電動モーター10を滑らかに駆動でき、効率を向上させることが出来る。
【0033】
C.第3の実施例:
第1、第2の実施例では、電磁コイル100の構成(巻数、線材の径)を調整し、電磁コイル100Aと電磁コイル100Bそれぞれによる駆動力のバランスを取るように構成している。しかし、電磁コイル100A、100Bの巻数が異なると、電磁コイル100A、100Bのインダクタンスが異なる。外側に配置される電磁コイル100Bが永久磁石200から受ける磁束密度の方が小さい。そのため、電磁コイル100Aに生じる誘起電圧と、同じ大きさの誘起電圧を電磁コイル100Bに生じさせるためには、電磁コイル100Bの巻数nbを電磁コイル100Aの巻数naよりも大きくする必要がある。そして、一般に、巻数が多いほどインダクタンスが大きくなり、誘起電圧に対して電流が遅れる。第3の実施例では、さらに進角制御を行い、電磁コイル100Aと電磁コイル100Bそれぞれによる駆動力のバランスを取る。
【0034】
図5は、電動モーターの制御部を示す説明図である。制御部400は、A相ゲイン進角調整部405Aと、B相ゲイン進角調整部405Bと、PWM信号生成部490と、モーター駆動信号生成部500と、モーター駆動回路510と、を備える。電動モーター10は、図1で説明した構成に加えて、A相センサー300Aと、B相センサー300Bとを備える。なお、図5では、電磁コイル100A、100Bと、永久磁石200と、A相センサー300Aと、B相センサー300B、のみを記載している。A相センサー300Aは、永久磁石200の電気角を検知するためのセンサーであり、例えばホール素子を用いた磁気センサーである。A相センサーは、電気角2πを周期としたA相センサー信号SSAを生成する。なお、B相センサー300Bも同様である。なお、A相センサー300AとB相センサー300Bとは、それぞれが生成するA相センサー信号SSAと、B相センサー信号SSBとが電気角でnπ(nは整数)ずれる位置を除いた配置とする。A相センサー信号SSAと、B相センサー信号SSBとが電気角でnπずれていると、A相センサー信号SSAと、B相センサー信号SSBとを用いて、電動モーター10のローター20(図1)の回転方向を検知することができない。すなわち、A相センサー信号SSAと、B相センサー信号SSBとは電気角でπ/2ずれている。
【0035】
A相ゲイン進角調整部405Aと、B相ゲイン進角調整部405Bとは同じ構成であるので、A相ゲイン進角調整部405Aを例にとり説明する。A相ゲイン進角調整部405Aは、アナログ−デジタルーコンバーター410A(以下、「ADコンバーター410A」と呼ぶ。)と、進角補正波形生成部420Aと、ゲイン補正波形生成部430Aと、駆動波形生成部440Aと、ゲイン調整値設定部450Aと、回転数検出部460Aと、最適進角生成部470Aと、進角特性設定部480Aと、を備える。駆動波形生成部440Aは、駆動波形記憶部445Aを備えている。駆動波形記憶部445Aは、誘起電圧波形に応じた駆動波形パターンを格納している。進角特性設定部480Aは、進角特性記憶部485Aを備えている。進角特性記憶部485Aは、回転数に対する進角特性、及びトルクに対する進角特性を記憶したテーブルを格納している。ゲイン調整値設定部450Aは、ゲイン調整値記憶部455Aを備えている。ゲイン調整値記憶部455Aは、電磁コイル100Aと100Bに発生する誘起電圧の差を補正するゲイン調整値を記憶している。これらのテーブルは、あらかじめ実験により求めておく。モーター駆動回路510は、A相負荷電流センサー520Aと、B相負荷電流センサー520Bとを備える。
【0036】
ADコンバーター410Aは、アナログ信号であるA相センサー300AからのA相センサー信号SSAをデジタル信号SSADに変換する。回転数検出部460Aは、例えば、所定の期間内のA相センサー信号の振幅の1/2の電圧をクロスする期間をクロックでカウントすることにより、半波長の周期を算出し、ローター20(図1)の回転数を検出することができる。進角特性設定部480Aは、回転数に対する進角特性、及びトルクに対する進角特性を保持している。最適進角生成部470Aは、ローター20の回転数と、A相負荷電流センサー520Aからの電磁コイル100Aに流れる電流量(トルクに比例)によって、進角特性設定部480Aから最適な進角調整値を読み出し、進角補正波形生成部420Aに設定する。電磁コイル100Aに流れる電流量を考慮するのは、この電流量は、電動モーター10にかかる負荷トルクに依存するからである。進角補正波形生成部420Aは、最適な進角調整値に基づき、デジタル信号SSADを進角調整し、進角補正波形を生成する。なお、進角を調整すると、電磁コイル100Aに流れる電流量が変化するため、本制御は、フィードバック制御となる。
【0037】
ゲイン調整値設定部450Aは、電磁コイル100Aと100Bに発生する誘起電圧の差を補正するゲイン調整値を保持している。ゲイン補正波形生成部430Aは、ゲイン調整値設定部450Aからのゲイン調整値と、進角補正波形と、を用いて、ゲイン調整された進角補正波形を生成する。駆動波形生成部440Aは、ゲイン調整された進角補正波形を用い、駆動波形記憶部445Aに格納された駆動波形パターンを参照して、電磁コイル100Aを駆動するための駆動波形を生成する。
【0038】
PWM信号生成部490は、駆動波形生成部440A、440Bからの駆動波形を用いて、電磁コイル100A、100Bを駆動するためのPWM信号を生成する。モーター駆動信号生成部500は、電磁コイル100A、100Bに流す電流をスイッチングするためのモーター駆動信号DRVA1H〜DRVB2Lを生成する。
【0039】
図6は、モーター駆動回路の一例を示す説明図である。モーター駆動回路510は、モーター駆動電源530と、平滑コンデンサーC1と、負荷電流センサー520A、520Bと、H型ブリッジ回路540A、540Bとを備える。平滑コンデンサーC1は、電源−グランド間に配置されている。A相用の負荷電流センサー520AとH型ブリッジ回路540Aは、電源―グランド間に直列に接続されている。H型ブリッジ回路540Aは、4つのトランジスタTr1〜Tr4を有している。各トランジスタTr1〜Tr4のドレインに電磁コイル100Aが接続されており、H型ブリッジ回路540Aの対角の2つのトランジスタ(例えばトランジスタTr1とTr4、あるいは、トランジスタTr2とTr3)がオンすることにより、電磁コイル100Aに電流が流れる。 トランジスタTr1〜Tr4のオンオフは、モーター駆動信号生成部500からのモーター駆動信号DRVA1H〜DRVA2Lにより実行される。B相用の負荷電流センサー520Bと、H型ブリッジ回路540B、についても同様である。
【0040】
図7Aは、無負荷回転時における回転数と各相の進角調整値の関係の一例を示す説明図である。ここで、破線は、調整値を直線近似したときの線である。図7Aから明らかなように、永久磁石200(図1)に近い方に配置された電磁コイル100Aよりも、永久磁石200に遠い方に配置された電磁コイル100Bの進角を大きくすることが好ましい。電磁コイル100Bの方が、永久磁石200から受ける磁束密度が小さいため、巻数を大きくしなければ電磁コイル100Aが発生させる誘起電圧と同じ大きさの誘起電圧を発生させることが出来ない。ここで、電磁コイル100Bの巻数を多くすると、インダクタンスが大きくなるため、誘起電圧波形に対する駆動電流波形がより遅れる。したがって、電磁コイル100Bの進角を電磁コイル100Aの進角よりも大きくすることが好ましい。また、ローター20の回転数が大きくなるほど進角を大きくすることが好ましい。ローターの回転数が大きくなると、電磁コイルを駆動する電気的周波数は速くなり、電気角である進角値は相対的に大きくなる。この図7Aは、無負荷回転時における進角調整値を示すテーブルを図に表したものであるが、進角特性記憶部485Aは、様々な負荷トルクにおける回転数と進角調整値との関係を示すテーブルを備えていることが好ましい。
【0041】
図7Bは、定回転(3000rpm)における負荷トルクと各相の進角調整値の関係の一例を示す説明図である。ここで、破線は、調整値を直線近似したときの線である。図7Bから明らかなように、永久磁石200(図1)に近い方に配置された電磁コイル100Aよりも、永久磁石200に遠い方に配置された電磁コイル100Bの進角を大きくすることが好ましい。また、電動モーター10への負荷トルクが大きくなるほど進角を大きくすることが好ましい。この図7Bは、定回転時における進角調整値を示すテーブルを図に表したものであるが、進角特性記憶部485Aは、様々な回転数における負荷トルクと進角調整値との関係を示すテーブルを備えていることが好ましい。また、テーブル以外に、トルクと回転数を引数とした関数から進角調整値を算出するように構成してもよい。
【0042】
図8は、A相センサー信号SSAと、A相モーター駆動信号DRVA1H〜DRVA2Lと、B相モーター駆動信号DRVB1H〜DRVB2Lと、A相コイル、B相コイルの端子電圧、のタイミングチャートを示す説明図である。図8において、上段が進角制御なし、下段が進角制御ありを示している。図6のモーター駆動回路における電源側のトランジスタTr1、Tr2、Tr5、Tr6(図6)をスイッチングするモーター駆動信号DRVA1H、DRVA2H、DRVB1H、DRVB2Hは、活性期間に1未満のデューティ比を有するPWM駆動波形であるが、グランド側のトランジスタTr3、Tr4、Tr7、Tr8(図6)をスイッチングするモーター駆動信号DRVA1L、DRVA2L、DRVB1L、DRVB2Lは、活性期間においてデューティ比が1となる矩形波である。
【0043】
進角制御ありのタイミングチャートでは、A相側のモーター駆動信号DRVA1H、DRVA2H、DRVA1L、DRVA2Lを駆動するタイミングが、回転数及びトルクに応じて早められており、B相側のモーター駆動信号DRVB1H、DRVB2H、DRVB1L、DRVB2Lを駆動するタイミングは、さらに、インダクタンスの違いにより早められている。その結果、電磁コイル100Aと電磁コイル100Bそれぞれによる駆動力のバランスを取ることができる。
【0044】
以上のように、本実施例では、A相用駆動信号とB相用駆動信号それぞれの最適進角生成部(図5においてA相用最適進角生成部470A、B相用最適進角生成部は図示せず)や進角特性設定部(図5においてA相用進角特性設定部480A、B相用進角特性設定部は図示せず)を独立して備え、また、ゲイン調整値設定部(図5においてA相用ゲイン調整値設定部450A、B相用ゲイン調整値設定部は図示せず)を独立して備えるので、相コイル毎に進角や駆動ゲインを調整することができる。その結果、電磁コイル100Aと電磁コイル100Bの、インダクタンスに起因する電流の遅れ及び誘起電圧の差に起因する電流のアンバランスをカバーし、それぞれによる駆動力のバランスを取ることができる。その結果、電動モーター10を滑らかに駆動でき、電動モーター10の効率を向上させることが出来る。
【0045】
なお、第1、第2の実施例の構成に加えて第3の実施例の構成を採用しても良く、第1、第2の実施例の構成を採用せず、第3の実施例のみを採用してもよい。また、進角調整、駆動ゲイン調整の両方を行っても良く、いずれか一方のみを行っても良い。
【0046】
図9は、本発明の変形例によるモーター/発電機を利用した移動体の一例としての電動自転車(電動アシスト自転車)を示す説明図である。この自転車3300は、前輪にモーター3310が設けられており、サドルの下方のフレームに制御回路3320と充電池3330とが設けられている。モーター3310は、充電池3330からの電力を利用して前輪を駆動することによって、走行をアシストする。また、ブレーキ時にはモーター3310で回生された電力が充電池3330に充電される。制御回路3320は、モーターの駆動と回生とを制御する回路である。このモーター3310としては、上述した各種の電動モーターを利用することが可能である。その結果、移動、加速、減速時における動作が滑らかとなり、乗り心地や効率のよい移動体を実現できる。
【0047】
図10は、本発明の変形例によるモーターを利用したロボットの一例を示す説明図である。このロボット3400は、第1と第2のアーム3410,3420と、モーター3430とを有している。このモーター3430は、被駆動部材としての第2のアーム3420を水平回転させる際に使用される。このモーター3430としては、上述した各種の電動モーターを利用することが可能である。ロボット3400の動作がスムーズとなり、ギクシャクしないロボット3400を実現できる。
【0048】
図11は、本発明の変形例によるモーターを利用した鉄道車両を示す説明図である。この鉄道車両3500は、モーター3510と、車輪3520とを有している。このモーター3510は、車輪3520を駆動する。さらに、モーター3510は、鉄道車両3500の制動時には発電機として利用され、電力が回生される。このモーター3510としては、上述した各種の電動モーターを利用することができる。その結果、移動、加速、減速時における動作が滑らかとなり、乗り心地や効率のよい移動体を実現できる。
【0049】
以上、いくつかの実施例に基づいて本発明の実施の形態について説明してきたが、上記した発明の実施の形態は、本発明の理解を容易にするためのものであり、本発明を限定するものではない。本発明は、その趣旨並びに特許請求の範囲を逸脱することなく、変更、改良され得るとともに、本発明にはその等価物が含まれることはもちろんである。
【符号の説明】
【0050】
10…電動モーター
15…ステーター
20…ローター
100、100A、100B…電磁コイル
110…ケーシング
111…円筒形状部分
112…端面部分
115…コイルバックヨーク
120…ネジ
200…永久磁石
210…サイドヨーク
230…回転軸
240…軸受け
300A、300B…センサー
400…制御部
410A…アナログ−デジタル−コンバーター(ADコンバーター)
420A…進角補正波形生成部
430A…ゲイン補正波形生成部
440A…駆動波形生成部
445A…駆動波形記憶部
450A…ゲイン調整値設定部
455A…ゲイン調整値記憶部
460A…回転数検出部
470A…最適進角生成部
480A…進角特性設定部
485A…進角特性記憶部
490…PWM信号生成部
500…モーター駆動信号生成部
510…モーター駆動回路
520A、520B…負荷電流センサー
530…モーター駆動電源
540A、540B…H型ブリッジ回路
3300…自転車
3310…モーター
3320…制御回路
3330…充電池
3400…ロボット
3410…第1のアーム
3420…第2のアーム
3430…モーター
3500…鉄道車両
3510…モーター
3520…車輪
Ba、Bb…平均磁束密度
Ban、Bbn…磁束密度
C1…平滑コンデンサー
DRVA1HからDRVB2L…モーター駆動信号
Ea、Eb…誘起電圧
La、Lb・・・磁界中の電線長
la、lb・・・電磁コイルの線材長
Lan、Lbn・・・一巻きの磁界中の電線長
na、nb…巻数
ra、rb・・・回転中心から電磁コイルまでの平均の長さ
ran、rbn・・・回転中心から電磁コイル一巻きまでの長さ
Ra、Rb…電気抵抗(巻線抵抗)
Sa、Sb・・・電磁コイルの線材断面積
SSA、SSB…センサー信号
SSAD…デジタル信号
Tr1〜Tr8…トランジスタ
【特許請求の範囲】
【請求項1】
回転軸を中心として回転するラジアルギャップ型の電気機械装置であって、
個々の永久磁石の磁化の方向が前記回転軸を中心とする放射または中心方向であり、前記回転軸を中心とする円周に沿って並べられた複数の永久磁石と、
前記複数の永久磁石と対向すると共に、前記永久磁石の外側の第1の円筒面に沿って並べられた第1相用の複数の第1の電磁コイルと、
前記複数の永久磁石と対向すると共に、前記第1の電磁コイルの前記第1の円筒面よりも外側の第2の円筒面に沿って並べられた第2相用の複数の第2の電磁コイルと、
を備え、
前記第1と第2の電磁コイルは、それぞれの誘起電圧が同じ値になり、かつ、それぞれの巻線抵抗が同じ値となるように構成されていることを特徴とする電気機械装置。
【請求項2】
請求項1に記載の電気機械装置において、
前記第1の電磁コイルの巻数をna、磁路長(磁界中の電線長)をla、線材断面積をSa、前記永久磁石から受ける平均磁束密度をBa、とし、
前記第2の電磁コイルの巻数をnb、磁路長をlb、線材断面積をSb、前記永久磁石から受ける平均磁束密度をBb、とするときに、
前記第1、第2の電磁コイルは、前記第1の円筒面上にそれぞれ投影された形状が同じ大きさに巻かれており(la=lb)、かつ、na/nb=Bb/Ba及び、na/nb=Sa/Sbを満たすように形成されている、電気機械装置。
【請求項3】
請求項1または2に記載の電気機械装置において、さらに、
前記第1、第2の電磁コイルを駆動するための駆動信号の進角を調整し、誘起電圧波形と駆動電流波形の位相を合わせる進角調整部を前記第1、第2の電磁コイル毎に備える、電気機械装置。
【請求項4】
請求項3に記載の電気機械装置において、さらに、
前記電気機械装置の回転数を検知する回転数検知部を備え、
前記進角調整部は、前記各電磁コイルの進角調整値を前記回転数に基づいて定める、電気機械装置。
【請求項5】
請求項3または請求項4に記載の電気機械装置において、
前記進角調整部は、前記各電磁コイルの進角調整値を前記電気機械装置に対するトルクに基づいて定める、電気機械装置。
【請求項6】
請求項3〜5のいずれか一項に記載の電気機械装置において、
前記進角調整部は、前記第2の電磁コイルの進角を前記第1の電磁コイルの進角よりも進める、電気機械装置。
【請求項7】
回転軸を中心として回転するラジアルギャップ型の電気機械装置であって、
個々の永久磁石の磁化の方向が前記回転軸を中心とする放射または中心方向であり、前記回転軸を中心とする円周に沿って並べられた複数の永久磁石と、
前記複数の永久磁石と対向すると共に、前記永久磁石の外側の第1の円筒面に沿って並べられた第1相用の複数の第1の電磁コイルと、
前記複数の永久磁石と対向すると共に、前記第1の電磁コイルの前記第1の円筒面よりも外側の第2の円筒面に沿って並べられた第2相用の複数の第2の電磁コイルと、
を備え、
前記第1の電磁コイルと前記第2の電磁コイルについて、その巻線損失が理想設計値と同じ値となるように、前記第1、第2の電磁コイルの巻数と、線材の太さとが調整されている、電気機械装置。
【請求項8】
回転軸を中心として回転するラジアルギャップ型の電気機械装置であって、
個々の永久磁石の磁化の方向が前記回転軸を中心とする放射または中心方向であり、前記回転軸を中心とする円周に沿って並べられた複数の永久磁石と、
前記複数の永久磁石と対向すると共に、前記永久磁石の外側の第1の円筒面に沿って並べられた第1相用の複数の第1の電磁コイルと、
前記複数の永久磁石と対向すると共に、前記第1の電磁コイルの前記第1の円筒面よりも外側の第2の円筒面に沿って並べられた第2相用の複数の第2の電磁コイルと、
を備え、さらに、
前記第1、第2の電磁コイルの誘起電圧の比に対応して前記第1と第2の電磁コイルの駆動電圧を、PWM制御のデューティを変えることで調整する電圧調整部を備える、電気機械装置。
【請求項9】
請求項1〜8のいずれか一項に記載の電気機械装置を有する移動体。
【請求項10】
請求項1〜8のいずれか一項に記載の電気機械装置を有するロボット。
【請求項1】
回転軸を中心として回転するラジアルギャップ型の電気機械装置であって、
個々の永久磁石の磁化の方向が前記回転軸を中心とする放射または中心方向であり、前記回転軸を中心とする円周に沿って並べられた複数の永久磁石と、
前記複数の永久磁石と対向すると共に、前記永久磁石の外側の第1の円筒面に沿って並べられた第1相用の複数の第1の電磁コイルと、
前記複数の永久磁石と対向すると共に、前記第1の電磁コイルの前記第1の円筒面よりも外側の第2の円筒面に沿って並べられた第2相用の複数の第2の電磁コイルと、
を備え、
前記第1と第2の電磁コイルは、それぞれの誘起電圧が同じ値になり、かつ、それぞれの巻線抵抗が同じ値となるように構成されていることを特徴とする電気機械装置。
【請求項2】
請求項1に記載の電気機械装置において、
前記第1の電磁コイルの巻数をna、磁路長(磁界中の電線長)をla、線材断面積をSa、前記永久磁石から受ける平均磁束密度をBa、とし、
前記第2の電磁コイルの巻数をnb、磁路長をlb、線材断面積をSb、前記永久磁石から受ける平均磁束密度をBb、とするときに、
前記第1、第2の電磁コイルは、前記第1の円筒面上にそれぞれ投影された形状が同じ大きさに巻かれており(la=lb)、かつ、na/nb=Bb/Ba及び、na/nb=Sa/Sbを満たすように形成されている、電気機械装置。
【請求項3】
請求項1または2に記載の電気機械装置において、さらに、
前記第1、第2の電磁コイルを駆動するための駆動信号の進角を調整し、誘起電圧波形と駆動電流波形の位相を合わせる進角調整部を前記第1、第2の電磁コイル毎に備える、電気機械装置。
【請求項4】
請求項3に記載の電気機械装置において、さらに、
前記電気機械装置の回転数を検知する回転数検知部を備え、
前記進角調整部は、前記各電磁コイルの進角調整値を前記回転数に基づいて定める、電気機械装置。
【請求項5】
請求項3または請求項4に記載の電気機械装置において、
前記進角調整部は、前記各電磁コイルの進角調整値を前記電気機械装置に対するトルクに基づいて定める、電気機械装置。
【請求項6】
請求項3〜5のいずれか一項に記載の電気機械装置において、
前記進角調整部は、前記第2の電磁コイルの進角を前記第1の電磁コイルの進角よりも進める、電気機械装置。
【請求項7】
回転軸を中心として回転するラジアルギャップ型の電気機械装置であって、
個々の永久磁石の磁化の方向が前記回転軸を中心とする放射または中心方向であり、前記回転軸を中心とする円周に沿って並べられた複数の永久磁石と、
前記複数の永久磁石と対向すると共に、前記永久磁石の外側の第1の円筒面に沿って並べられた第1相用の複数の第1の電磁コイルと、
前記複数の永久磁石と対向すると共に、前記第1の電磁コイルの前記第1の円筒面よりも外側の第2の円筒面に沿って並べられた第2相用の複数の第2の電磁コイルと、
を備え、
前記第1の電磁コイルと前記第2の電磁コイルについて、その巻線損失が理想設計値と同じ値となるように、前記第1、第2の電磁コイルの巻数と、線材の太さとが調整されている、電気機械装置。
【請求項8】
回転軸を中心として回転するラジアルギャップ型の電気機械装置であって、
個々の永久磁石の磁化の方向が前記回転軸を中心とする放射または中心方向であり、前記回転軸を中心とする円周に沿って並べられた複数の永久磁石と、
前記複数の永久磁石と対向すると共に、前記永久磁石の外側の第1の円筒面に沿って並べられた第1相用の複数の第1の電磁コイルと、
前記複数の永久磁石と対向すると共に、前記第1の電磁コイルの前記第1の円筒面よりも外側の第2の円筒面に沿って並べられた第2相用の複数の第2の電磁コイルと、
を備え、さらに、
前記第1、第2の電磁コイルの誘起電圧の比に対応して前記第1と第2の電磁コイルの駆動電圧を、PWM制御のデューティを変えることで調整する電圧調整部を備える、電気機械装置。
【請求項9】
請求項1〜8のいずれか一項に記載の電気機械装置を有する移動体。
【請求項10】
請求項1〜8のいずれか一項に記載の電気機械装置を有するロボット。
【図1】


【図2】
【図3】
【図4A】
【図4B】
【図5】
【図6】
【図7A】
【図7B】
【図8】
【図9】
【図10】
【図11】
【図2】
【図3】
【図4A】
【図4B】
【図5】
【図6】
【図7A】
【図7B】
【図8】
【図9】
【図10】
【図11】
【公開番号】特開2012−170207(P2012−170207A)
【公開日】平成24年9月6日(2012.9.6)
【国際特許分類】
【出願番号】特願2011−28276(P2011−28276)
【出願日】平成23年2月14日(2011.2.14)
【出願人】(000002369)セイコーエプソン株式会社 (51,324)
【Fターム(参考)】
【公開日】平成24年9月6日(2012.9.6)
【国際特許分類】
【出願日】平成23年2月14日(2011.2.14)
【出願人】(000002369)セイコーエプソン株式会社 (51,324)
【Fターム(参考)】
[ Back to top ]