
電気自動車の回生制動制御装置
【課題】
電気自動車の回生制動制御装置に関し、良好な制動フィーリングを実現しつつ、エネルギ回収効率を好適にする。
【解決手段】
電気自動車の回生制動制御装置であって、第1摩擦制動装置15bによる機械的制動トルクの推定値である第1機械的制動トルクTmRを、制動が駆動輪11bと路面間の最大摩擦力でなされたと仮定した時の制動トルクである第1理想制動トルクTIRよりも小さくなるように設定する第1機械的制動トルク推定手段22と、第1理想制動トルクTIRと第1機械的制動トルクTmRとの差を目標回生制動トルクTCとして算出する目標回生制動トルク推定手段23とを備えて構成する。
電気自動車の回生制動制御装置に関し、良好な制動フィーリングを実現しつつ、エネルギ回収効率を好適にする。
【解決手段】
電気自動車の回生制動制御装置であって、第1摩擦制動装置15bによる機械的制動トルクの推定値である第1機械的制動トルクTmRを、制動が駆動輪11bと路面間の最大摩擦力でなされたと仮定した時の制動トルクである第1理想制動トルクTIRよりも小さくなるように設定する第1機械的制動トルク推定手段22と、第1理想制動トルクTIRと第1機械的制動トルクTmRとの差を目標回生制動トルクTCとして算出する目標回生制動トルク推定手段23とを備えて構成する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車輪に回生駆動される電動発電機及びこの車輪を制動する摩擦制動装置を有する電気自動車において、電動機の回生制動トルク量を制御する回生制動制御装置に関する。
【背景技術】
【0002】
電動機を動力源として車輪を駆動する電気自動車では、制動時における駆動輪のトルクを利用して電動機で発電し、電力を回生する制御(以下「回生制動制御」という)が行われている。回生制動制御によってバッテリに吸収される回生制動トルクは、車輪に併設されたディスクブレーキ装置やドラムブレーキ装置等の摩擦制動装置で消費される摩擦制動トルクと併せて、車両を制動するトルク(以下「制動トルク」という)として働くことになる。このように、車輪に回生制動トルクと摩擦制動トルクとを作用させて制動する際に、回生制動トルク量を制御することによって、制動時のエネルギ回収効率を向上させる技術が提案されている。
【0003】
例えば、以下の特許文献1には、制動時の電動駆動輪のロック傾向に応じて電動駆動輪への回生制動トルクを制御する技術が開示されている。この技術では、アンチスキッド制御の開始を遅らせ、その間も回生制動を継続してエネルギ回収効率を向上することが可能であるとされている。
また、以下の特許文献2には、制動モードが切り替え可能な車両用制動装置において、制御モードの切り替えをブレーキペダルの踏力に応じて行う技術が開示されている。この技術では、ブレーキペダルの踏力が所定値以下の通常制動時には回生優先モードが選択されると共に、ブレーキペダルの踏力が所定値以上となる急制動時には通常モードへのモード切り替えが行われるようになっている。その結果、回生制動時の電動駆動輪のロックが防止されて回生制動が継続できるようになるため、エネルギ回収効率を向上することが可能であるとされている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2003−174703号公報
【特許文献2】特開平5−161213号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、特許文献1及び2の技術は、回生制動トルクを継続させるため、回生制動時の電動駆動輪がロック傾向にある場合にはモード切替で回生制動のタイミングを制御しようとするものである。つまり、ロック傾向にある場合に回生制動トルクを継続させることで、エネルギ回収効率を良好させようとするものではあるが、回生制動時における回生制動トルク量そのものを設定・制御するものではない。
【0006】
したがって、特許文献1及び2の技術では、時々刻々と変化する電気自動車の走行状況に合わせて回生制動による良好なエネルギ回収効率を実現することは難しい。
本発明はこのような課題に鑑みてなされたもので、回生制動によるエネルギ回収効率を向上させることができるようにした、電気自動車の回生制動制御装置を提供することを目的とする。
【課題を解決するための手段】
【0007】
本発明の電気自動車の回生制動制御装置(請求項1)は、電気自動車の回生制動制御装置であって、該電気自動車の駆動輪と接続された電動発電機と、該駆動輪を機械的に制動する第1摩擦制動装置と、該駆動輪の制動が、路面と該駆動輪との間の最大摩擦力でなされたと仮定した時の制動トルクである第1理想制動トルクを推定する第1理想制動トルク推定手段と、該第1摩擦制動装置による機械的な制動トルクを第1機械的制動トルクとして推定する第1機械的制動トルク推定手段と、該電動発電機を発電機として用いることで得られる回生制動トルクの目標を目標回生制動トルクとして推定する目標回生制動トルク推定手段と、該目標回生制動トルクの範囲内で該電動発電機による該回生制動トルクを調整する回生制動制御を実行する回生制動制御手段とを備え、該第1機械的制動トルク推定手段は、該第1機械的制動トルクが該第1理想制動トルクよりも小さくなるように設定し、該目標回生制動トルク推定手段は、該第1理想制動トルク推定手段によって推定された該第1理想制動トルクと、該第1機械的制動トルク推定手段によって推定された該第1機械的制動トルクとの差を該目標回生制動トルクとして算出することを特徴としている。
【0008】
また、本発明の電気自動車の回生制動制御装置(請求項2)は、請求項1記載の内容において、該駆動輪としての後輪と、該電気自動車の前輪を機械的に制動する第2摩擦制動装置と、前輪の制動が、路面と該駆動輪との間の最大摩擦力でなされたと仮定した時の制動トルクである第2理想制動トルクを推定する第2理想制動トルク推定手段と、該第1理想制動トルクと該第2理想制動トルクとの関係を規定する理想制動トルクマップとを備え、該第1理想制動トルク推定手段は、該第2理想制動トルク推定手段によって推定された該第2理想制動トルクを該理想制動トルクマップに適用することで該第1理想制動トルクを推定することを特徴としている。
【0009】
また、本発明の電気自動車の回生制動制御装置(請求項3)は、請求項2記載の内容において、該電気自動車の実減速度を検出する実減速度検出手段と、該後輪が支持する該電気自動車の車重を第1車重として推定する第1車重演算手段と、該前輪が支持する該電気自動車の車重を第2車重として推定する第2車重演算手段とを備え、該第1理想制動トルク推定手段は、該実減速度検出手段によって検出された該実減速度と該第1車重演算手段によって推定された該第1車重と該第2車重演算手段によって推定された該第2重量とに基づいて該第1理想制動トルクを推定し、該第2理想制動トルク推定手段は、該実減速度検出手段によって検出された該実減速度と該第1車重演算手段によって推定された該第1車重と該第2車重演算手段によって推定された該第2車重とに基づいて該第2理想制動トルクを推定することを特徴としている。
【0010】
また、本発明の電気自動車の回生制動制御装置(請求項4)は、請求項3記載の構成に加え、該後輪側における該電気自動車の車高を第1車高として検出する第1車高検出手段と、該前輪側における該電気自動車の車高を第2車高として検出する第2車高検出手段と、該第1車高と該第1車重との関係を規定する第1車重マップと、該第2車高と該第2車重との関係を規定する第2車重マップとを備え、該第1車重演算手段は、該第1車高検出手段によって検出された該第1車高を該第1車重マップに適用することで該第1車重を演算し、該第2車重演算手段は、該第2車高検出手段によって検出された該第2車高を該第2車重マップに適用することで該第2車重を演算することを特徴としている。
【0011】
また、本発明の電気自動車の回生制動制御装置(請求項5)は、請求項1〜4の何れか1項に記載の構成に加え、該第2摩擦制動装置による機械的制動トルクを第2機械的制動トルクとして推定する第2機械的制動トルク推定手段と、該車両のブレーキペダルの踏力を検出するブレーキペダル踏力検出手段と、該ブレーキペダル踏力と該第1機械的制動トルクとの関係を規定する第1機械的制動トルクマップと、該ブレーキペダル踏力と該第2機械的制動トルクとの関係を規定する第2機械的制動トルクマップとを備え、該第2機械的制動トルク推定手段は、該ブレーキペダル踏力検出手段によって検出された該ブレーキペダル踏力を該第2機械的制動トルクマップに適用することで該第2機械的制動トルクを演算し、該第1機械的制動トルク推定手段は、該ブレーキペダル踏力検出手段によって検出された該ブレーキペダル踏力を該第1機械的制動トルクマップに適用することで該第1機械的制動トルクを演算することを特徴としている。
【0012】
また、本発明の電気自動車の回生制動制御装置(請求項6)は、請求項1〜5の何れか1項に記載の構成に加え、該第1機械的制動トルクマップ及び該第2機械的制動トルクマップには、該第1機械的制動トルクと該第1理想制動トルクが同値となり且つ該第2機械的制動トルクと該第2理想制動トルクが同値となる場合の減速度が、該電動発電機の最大回生トルクとなる範囲で、該第1機械的制動トルクと該第2機械的制動トルクとの関係が規定されていることを特徴としている。
【0013】
また、本発明の電気自動車の回生制動制御装置(請求項7)は、請求項1〜6の何れか1項に記載の構成に加え、該回生制動制御手段は、該第1理想制動トルク及び該第2理想制動トルクで制動を行った場合、該車両で生じる減速度である理想減速度を推定する理想減速度推定手段と、該理想減速度推定手段によって検出された該理想減速度と実減速度検出手段によって検出された該実減速度との差の絶対値が、設定された所定範囲の値から外れた場合に、該目標回生制動トルクを補正する補正制御を実施する目標回生制動トルク補正手段とを備えていることを特徴としている。
【0014】
また、本発明の電気自動車の回生制動制御装置(請求項8)は、請求項1〜7の何れか1項に記載の構成に加え、該回生制動制御手段は、該電気自動車の車速を検出する車速検出手段を備え、該車速検出手段により検出された該車速が、設定された車速閾値でない場合に回生制動制御を実施することを特徴としている。
【発明の効果】
【0015】
本発明の電気自動車の回生制動制御装置(請求項1)によれば、電気自動車の減速を確実に実現しながら、エネルギ回生効率を向上させることができる。また、電気自動車の制動が駆動輪と路面間の最大摩擦力で行われた場合にも減速時における駆動輪のロックを確実に回避することが可能となるので、滑りやすい路面においてもドライバに不安や違和感を与えることなく、回生制動制御を実施することができる。
【0016】
また、本発明の電気自動車の回生制動制御装置(請求項2)によれば、理想制動トルクマップを用いることで、複雑な演算をすることなく、迅速且つ確実に後輪の理想制動トルク、即ち、第1理想制動トルクを得ることができる。
また、本発明の電気自動車の回生制動制御装置(請求項3)によれば、実減速度と第1車重と第2車重とに基づいて後輪の理想制動トルク、即ち、第1理想制動トルクを正確に得ることができ、且つ、実減速度と第1車重および第2車重とに基づいて前輪の理想制動トルク、即ち、第2理想制動トルクも正確に得ることができる。
【0017】
また、本発明の電気自動車の回生制動制御装置(請求項4)によれば、第1車重マップを用いることで、複雑な演算をすることなく、迅速且つ確実に後輪側の車重、即ち、第1車重を得ることができる。同様に、第2車重マップを用いることで、複雑な演算をすることなく、迅速且つ確実に前輪側の車重、即ち、第2車重を得ることができる。
また、本発明の電気自動車の回生制動制御装置(請求項5)によれば、ドライバの減速意思が素早く反映されるブレーキペダル踏力が直接検出されるようになっているため、ドライバの減速意思を迅速に検出することが可能となり、迅速且つ確実に第1機械的制動トルク及び第2機械的制動トルクを推定することができる。また、第1機械的制動トルクマップを用いることで、複雑な演算をすることなく、迅速且つ確実に第1機械的制動トルクを得ることができる。同様に、第2機械的制動トルクマップを用いることで、複雑な演算をすることなく、迅速且つ確実に第2機械的制動トルクを得ることができる。
【0018】
また、本発明の電気自動車の回生制動制御装置(請求項6)によれば、第1機械的制動トルクと第1理想制動トルクとの差を比較的大きくすることができるため、回生効率を高めることができる。
また、本発明の電気自動車の回生制動制御装置(請求項7)によれば、理想減速度と実減速度との差の絶対値が設定された所定範囲の値以上である場合に、電気自動車の制動効果を所定範囲に確保しながら目標回生制動トルクの補正制御を実施するようになっているため、電気自動車の走行状況に適合する目標回生制動トルクを迅速且つ確実に得ることができる。
【0019】
また、本発明の電気自動車の回生制動制御装置(請求項8)によれば、車速が設定された所定値でない場合に、回生制動制御を実施するようになっている。したがって、電気自動車が停止している場合は回生制動制御が行われることはなく、回生制動制御が必要な時期に確実に実施することができる。
【図面の簡単な説明】
【0020】
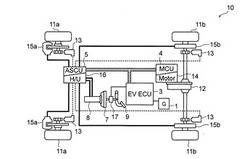
【図1】本発明の一実施形態に係る電気自動車の回生制動制御装置が適用された車両の全体構成を示す模式図である。
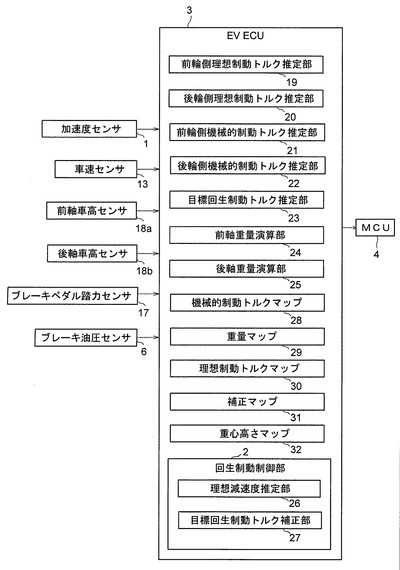
【図2】本発明の一実施形態に係る電気自動車の回生制動制御装置の要部構成を模式的に示すブロック図である。
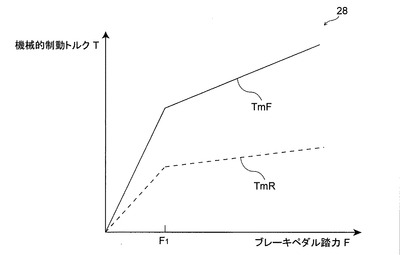
【図3】本発明の一実施形態に係る電気自動車の回生制動制御装置で用いられるペダル踏力と前後輪制動トルクとの関係を規定するマップである。
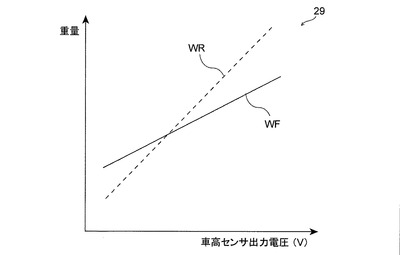
【図4】本発明の一実施形態に係る電気自動車の回生制動制御装置による車両重量の推定に用いられ、車高センサの出力電圧と車両重量との関係を規定するマップである。
【図5】本発明の一実施形態に係る電気自動車の回生制動制御装置による電気自動車の重心高さの推定に用いられ、車重重量と重心高さとの関係を規定するマップである。
【図6】本発明の一実施形態に係る電気自動車の回生制動制御装置に用いられる前輪制動トルクと後輪制動トルクの関係を規定するマップである。
【図7】本発明の一実施形態に係る電気自動車の回生制動制御装置による重量補正方法に用いられるマップである。
【図8】本発明の一実施形態に係る電気自動車の回生制動制御装置による制御手順を模式的に示すフローチャートである。
【発明を実施するための形態】
【0021】
[1.全体構成]
本実施形態の回生制動制御装置は、電気自動車10に適用されている。図1に示すように、この電気自動車10は、前側の車輪(前輪)11a及び後側の車輪(後輪)11bを有している。前輪11aには前輪側機械式ブレーキ装置(第2摩擦制動装置)15aが設けられ、後輪11bには後輪側機械式ブレーキ装置(第1摩擦制動装置)15bが設けられている。また、この電気自動車10は、後輪11bの二輪がギヤボックス12を介してモータ(電動発電機)14と機械的に接続され、これらの後輪11bがモータ14によって駆動されるようになっている。
【0022】
また、図1及び図2に示すように、この電気自動車10には、制動制御に係る電子制御ユニットとして、EVECU(Electric Vehicle Electronic Control Unit)3,MCU(Motor Control Unit)4及びASCU(Active Stability Control Unit)5が設けられている。これらの各電子制御ユニット3,4,5は、マイクロコンピュータで構成された電子制御装置であり、マイクロプロセッサやメモリ等を集積したLSIデバイスとして提供されている。
【0023】
EVECU3には、電気自動車10の車体に作用する前後方向の制動減速度(実減速度)GRを検出する加速度センサ(実減速度検出手段)1,ブレーキペダル9の踏み込みの有無及びブレーキペダルの踏み込み力を検出するブレーキペダル踏力センサ(ブレーキペダル踏力検出手段)17,前輪11aにおける電気自動車10の車高である前軸車高(第2車高)h2を検出する前軸車高センサ(第2車高検出手段)18a及び後輪11bにおける電気自動車10の車高である後軸車高(第1車高)h1を検出する後軸車高センサ(第1車高検出手段)18bが接続されている。そして、これらの検出情報はEVECU3へ入力されるようになっている。
【0024】
また、各車輪11a,11bには、その回転数を検出する速度センサ(車速検出手段)13が設けられている。この速度センサ13により検出された各車輪11a,11bの回転数は、ASCU5へ入力されるようになっている。なお、ASCU5は入力された各車輪11a,11bの回転数に基づいて車速Vを算出しており、ここで算出された車速VもEVECU3へ入力されるようになっている。
【0025】
また、EVECU3は、MCU4及びASCU5よりも上位の電子制御ユニットである。すなわち、EVECU3はMCU4及びASCU5を統括管理する機能を有しており、MCU4及びASCU5で実施される制御のタイミングや制御量の設定,指示を管轄としている。
MCU4は、EVECU3からの指示を受けて具体的な制御電圧,制御電流の値を演算し、モータ14へ制御信号を送信するものである。なおモータ14は、MCU4からの制御信号に応じて、電動機としても発電機としても機能するようになっている。
【0026】
ASCU5は、EVECU3からの指示を受けてH/U(Hydraulic Unit;油圧制御ユニット)16を制御し、各車輪11a,11bの各々の機械式ブレーキ装置15a,15bを個別に制御するものである。これにより、ASCU5は所謂ASC機能を備えており、各車輪11a,11bのグリップ力に応じた制動力を各車輪11a,11bへ付与して姿勢の安定性を向上させることができるようになっている。
【0027】
H/U16は各機械式ブレーキ装置15a,15bへ導入されるブレーキ液圧を制御するアクチュエータである。このH/U16は油圧配管でブレーキマスターシリンダー8に接続されており、ブレーキペダル9の踏み込みによってブレーキブースター7を介して入力されたブレーキ液圧を受けて、各機械式ブレーキ装置15a,15bを制御するようになっている。
【0028】
[2.EVECU]
電気自動車10の回生制動時における回生制動制御に係る制御構成について詳述する。
EVECU3は、図示しないアクセルペダルが放された時およびブレーキペダル9が踏み込まれているときには、エンジンを動力とする一般的な車両におけるエンジンブレーキに相当する大きさの回生トルク量を設定し、モータ14を制御するようになっている。また、より回生効率を高めるためには、回生トルク量をできるだけ増大させる必要がある。しかし、回生トルク量の設定が大きすぎれば、過剰に制動力が作用することになり、電気自動車10を運転するドライバに対しても、ドライバの意に反した過剰な制動力が及び得ることになる。それにより、ドライバの操作フィーリングが損なわれることになる。そこで、このEVECU3では、ドライバを含む電気自動車10の乗員に不安や違和感を与えるようにしない範囲で、できるだけ回生効率を高めるように、MCU4を介してモータ14の回生トルク量を制御するようになっている。
【0029】
EVECU3のメモリは、いずれもプログラムソフトとして、前輪側理想制動トルク推定部(第2理想制動トルク推定手段)19,後輪側理想制動トルク推定部(第1理想制動トルク推定手段)20,前輪側機械的制動トルク推定部(第2機械的制動トルク推定手段)21,後輪側機械的制動トルク推定部(第1機械的制動トルク推定手段)22,目標回生制動トルク推定部(目標回生制動トルク推定手段)23,回生制動制御部(回生制動制御手段)2,前軸車重演算部(第2車重演算手段)24,後軸車重演算部(第1車重演算手段)25,理想減速度推定部(理想減速度推定手段)26及び目標回生制動トルク補正部(目標回生制動トルク補正手段)27を備えている。
【0030】
[2−1.前輪側機械的制動トルク推定部21,後輪側機械的制動トルク推定部22]
EVECU3のメモリには、図3に示す機械的制動トルクマップ28(第1機械的制動トルクマップ,第2機械的制動トルクマップ)が記録されている。この機械的制動トルクマップ28には、前輪側機械式ブレーキ装置15aによる機械的制動トルクの推定実力値である前輪側機械的制動トルク(第2機械的制動トルク)TmFとブレーキペダル踏力Fとの対応関係、及び、後輪側機械式ブレーキ装置15bによる機械的制動トルクの推定実力値である後輪側機械的制動トルク(第1機械的制動トルク)TmRとブレーキペダル踏力Fとの対応関係が規定されている。この機械的制動トルクマップ28には、ブレーキペダル踏力Fが大きくなるにしたがい、前後輪側機械的制動トルクTmF,TmRも大きくなる特性が規定されている。また、機械的制動トルクマップ28は、回生制動時には、後輪側よりも前輪側の方に、より大きな負荷が加えられることとなるため、後輪側機械的制動トルクTmRよりも前輪側機械的制動トルクTmFの方が大きくなるように設定されている。なお、ブレーキペダル踏力FがF1である場合に、前輪側機械的制動トルクTmF及び後輪側機械的制動トルクTmRの変化割合が急変するのは、ブレーキブースター7の性能に起因するものである。
【0031】
前輪側機械的制動トルク推定部21は、ブレーキペダル踏力センサ17により検出されたブレーキペダル踏力Fを、この機械的制動トルクマップ28に適用することで、前輪側機械的制動トルクTmFを求めるようになっている。
同様に、後輪側機械的制動トルク推定部22は、ブレーキペダル踏力センサ17により検出されたブレーキペダル踏力Fを、この機械的制動トルクマップ28に適用することで、後輪側機械的制動トルクTmRを求めるようになっている。
そして、前輪側機械的制動トルク推定部21によって得られた前輪側機械的制動トルクTmF、及び、後輪側機械的制動トルク推定部22によって得られた後輪側機械的制動トルクTmRは後述するEVECU3の目標回生制御トルク推定部23に送られるようになっている。
【0032】
[2−2.前軸車重演算部24,後軸車重演算部25]
EVECU3のメモリには、図4に示す車重マップ(第1車重マップ,第2車重マップ)29が記録されている。この車重マップ29には、前軸車高センサ18aの出力電圧及び前軸重量(第2車重)WFとの対応関係、及び、後軸車高センサ18bの出力電圧及び後軸重量(第1車重)WRとの対応関係が規定されている。
【0033】
前軸車重演算部24は、前軸車高センサ18aによって検出された前輪11aにおける電気自動車10の車高(第2車高)h2を、この車重マップ29に適用することで、前輪11aが支持する電気自動車10の重量(前軸重量)WFを求めるようになっている。
同様に、後軸車重演算部25は、後軸車高センサ18bによって検出された後輪11bにおける電気自動車の車高(第1車高)h1を、この重量マップ29に適用することで、後輪11bが支持する電気自動車10の重量(後軸重量)WRを求めるようになっている。
【0034】
また、後軸車重演算部25は、前軸重量WF及び後軸重量WRを合算することによって、車体重量に乗員や積荷等の重量を加算した実総重量である電気自動車10の車両総重量Wを求められるようになっている。さらに、後軸車重演算部25は、前軸重量WF及び後軸重量WRにより、各車輪11a,11bの接地面(即ち、路面)から電気自動車10全体の重心までの高さで(重心高さ)Hを求めるようになっている。具体的には、EVECU3のメモリには、図5に示す重心高さマップ32が記録されている。この重心高さマップ32には、車両総重量W(前軸重量WF+後軸重量WR)と重心高さHとの対応関係が規定されている。この重心高さマップ32には、車両総重量Wが大きくなるにしたがい、重心高さHも大きくなる特性が規定されている。後軸車重演算部25は、車両総重量Wをこの重心高さマップ32に適用することで、重心高さHを求めるようになっている。
【0035】
さらに、これらの前軸車重演算部24及び後軸車重演算部25は、後述する目標回生制動トルク補正部27によって演算された荷重補正係数Kwに基づき、以下の式(1),(2)及び(3)を用いて荷重補正後の前軸重量WFc,荷重補正後の後軸重量WRc,荷重補正後の車両総重量Wcを演算するようになっている。
WFc=WF×Kw・・・(1)
WRc=WR×Kw・・・(2)
Wc=WFc+WRc・・・(3)
【0036】
[2−3.前輪側理想制動トルク推定部19,後輪側理想制動トルク推定部20]
前輪側理想制動トルク推定部19は、各種路面で想定される前輪11aと路面の摩擦力との関係において、路面と前輪11aとの間の最大摩擦力でなされたと仮定した時の制動トルク、即ち、前輪11aがロックしない範囲における前輪11aの最大制動トルクである前輪側理想制動トルク(第2理想制動トルク)TIFを推定するものである。より具体的に、この前輪側理想制動トルク推定部19は、以下の式(4)及び(5)を用いて前輪側理想制動トルクTIFを算出するようになっている。

【0037】
なお、上記の式(4)及び(5)において、用いられているパラメータは以下のとおりである。
車両総重量W
前軸重量WF
重心高さH
制動減速度GR
前輪11aの半径Rf
ホイールベースL
また、式(4)において求められるBFは、前輪11aが制動減速度GR相当の摩擦係数の路面で制動されたと仮定した時の制動トルク、即ち、前輪11aがロックしない範囲における前輪11aの最大制動力である前輪側理想制動力である。
【0038】
また、後輪側理想制動トルク推定部20は、後輪11bが各種路面で想定される後輪11bと路面の摩擦力との関係において、路面と後輪11bとの間の最大摩擦力でなされたと仮定した時の制動トルク、即ち、後輪11bがロックしない範囲における後輪11bの最大制動トルクである後輪側理想制動トルク(第1理想制動トルク)TIRを推定するものである。より具体的に、この後輪側理想制動トルク推定部20は、以下の式(6)及び(7)を用いて後輪側理想制動トルクTIRを算出するようになっている。
【0039】
なお、上記の式(6)及び(7)において、用いられているパラメータは以下のとおりである。
車両総重量W
後軸重量WR
重心高さH
制動減速度GR
後輪11bの半径Rr
ホイールベースL
また、式(6)において求められるBRは、後輪11bが制動減速度GR相当の摩擦係数の路面で制動されたと仮定した時の制動トルク、即ち、後輪11bがロックしない範囲における後輪11bの最大制動力である前輪側理想制動力である。
【0040】
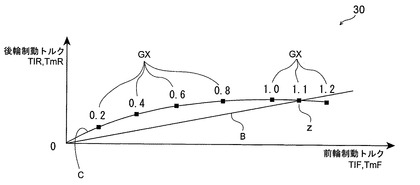
図6に示すマップは、前輪側理想制動トルクTIFと後輪側理想制動トルクTIRとの関係は、上記(5)式及び(7)式により、2次曲線(以下「理想制動トルク曲線C」という)で作成されている。また、この理想制動トルク曲線Cは、第1理想制動トルクTIRと第2理想制動トルクTIFとの関係を規定する理想制動トルクマップ(理想制動トルクマップ)30として用いられるようになっている。
【0041】
一方、前輪側機械的制動トルクTmFと後輪側機械的制動トルクTmRとの関係は、図6に示す直線B(以下「機械的制動トルク直線B」という)として規定されている。これは、図3に示すように、ブレーキペダル踏力Fと前後輪側機械的制動トルクTmF,TmRとの関係が、原則的に比例関係にあることに起因している。
【0042】
[2−4.目標回生制動トルク推定部23]
目標回生制動トルク推定部23は、モータ14を発電機として用いることで得られる回生制動トルクの目標である目標回生制動トルク(目標回生制動トルク)TCを推定算出するものである。具体的には、本実施形態では、前輪11aがモータ14と接続されておらず、前輪11a側から回生制動トルクを得ることはできず、後輪11b側からのみ回生制動トルクを得ることとなる。つまり、前輪側理想制動トルクTIFと前輪側機械的制動トルクTmFは常に同値となり、よって、目標回生制動トルク推定部23は、後輪側理想制動トルクTIRと後輪側機械的制動トルクTmRとの差分を目標回生制動トルクTCとして算出するようになっている。
【0043】
[2−5.回生制動制御部2]
回生制動制御部2は、いずれもサブプログラムとして理想減速度推定部26及び目標回生制動トルク補正部27を備えている。
理想減速度推定部26は、上記の式(5)によって得られた前輪側理想制動トルクTIFが前輪11aに作用するとともに、上記の式(7)によって得られた後輪側理想制動トルクTIRが後輪11bに作用した際、電気自動車10に生じる減速度である理想減速度GXを推定するものである。なお、この理想減速度GXは、図6に示す理想制動トルク曲線Cと同一曲線として規定される。
【0044】
また、この理想制動トルクマップ30において、機械的制動トルク直線Bと理想制動トルク曲線Cとの交点Zは、一部の当業者で「ゼットクリティカル」と呼ばれている。このゼットクリティカルZでは、前輪側理想制動トルクTIFと前輪側機械的制動トルクTmFとが同値となり、また、後輪側理想制動トルクTIRと後輪側機械的制動トルクTmRとも同値となる。換言すれば、ゼットクリティカルZは、目標回生制動トルクTCが0となり、回生制動トルクが得られなくなる前輪側機械的制動トルクTmF及び後輪側機械的制動トルクTmRを規定する点である。
【0045】
また、このゼットクリティカルZは、機械的制動トルク直線Bの傾きによって決定される。そして、機械的制動トルク直線Bの傾きが小さい程、ゼットクリティカルZでの理想減速度GXの値が大きくなり、その結果、目標回生制動トルクTCも大きくなる。
ここで、機械的制動トルク直線Bの傾きは、電動発電機14の回生制動トルクの最大値となる場合の減速度(本実施形態においては、2.4程度)を超えない範囲で決定される。なお、本実施形態では、目標回生制動トルクTCを大きくするため、ゼットクリティカルZでの理想減速度GXが1.1となるように機械的制動トルク直線Bを設定している。なお、一般的な車両において、機械的制動トルク直線Bの設定範囲は、機械的制動トルクでの理想減速度GXが0.5〜0.8程度となるように設定されている。
【0046】
また、図7に示すように、EVECU3のメモリには、理想減速度GXと制動減速度GRとの減速度差GXRと荷重補正係数Kwとの対応関係を記述した補正マップ31が記録されている。なお、補正マップ31は、減速度差GXRの絶対値|GXR|が、所定範囲ΔGを超えた場合に、後述する目標回生制動トルク補正部27により荷重補正係数Kwが読み込まれるようになっている。
【0047】
目標回生制動トルク補正部27は、上述した減速度差GXR(即ち、理想減速度GXと制動減速度GRとの差)を演算し、この減速度差GXRを補正マップ31に適用することで、荷重補正係数Kwを求めるものである。
また、前後輪側理想制動トルク推定部19,20は、目標回生制動トルク推定部23によって算出された荷重補正後の車両総重量Wc,荷重補正後の前軸重量WFc,荷重補正後の後軸重量WRcを、それぞれ上記式(1)及び(3)の車両総重量W,前軸重量WF,後軸重量WRに代入することで、荷重補正後の前後輪側理想制動力BFc,BRcが算出されるようになっている。さらに、前後輪側理想制動トルク推定部19,20は、荷重補正後の前後輪側理想制動力BFc,BRcを上記式(2)及(4)に適用することで、荷重補正後の前後輪側理想制動トルクTIFc,TIRcが算出されるようになっている。故に、目標回生制動トルク補正部27によって算出される荷重補正係数Kwに基づいて、前後輪側理想制動トルクTIF,TIRの値が補正され、さらに、目標回生制動トルクTCの補正制御が実施されることになる。
【0048】
[3.フローチャート]
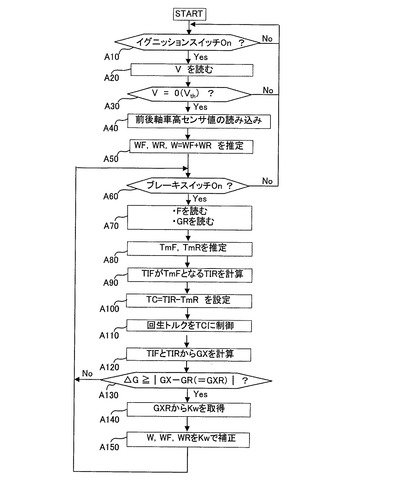
図8を用いて、本回生制動制御装置における制御手順を説明する。このフローは、予め設定された所定の周期で繰り返し実施されている。
まず、ステップA10では、EVECU3によって、イグニッションスイッチが操作されているか否かが判定され、操作されていればステップA20へ進む。一方、イグニッションスイッチが操作されていない場合には、再度、ステップA10へ戻る。
【0049】
ステップA20では、EVECU3によって、ASCU5で算出された車速Vが読み込まれる。続くステップ30では、EVECU3によって、車速Vが車速閾値Vthであるか否かが判定され、車速Vが車速閾値Vthである場合にはステップA40へ進む。一方、車速Vが車速閾値Vthでない場合には、ステップA10へ戻る。なお、車速閾値Vthの値は0に設定されている。
【0050】
ステップA40では、EVECU3によって、前後軸車高センサ18a,18bの出力電圧(即ち、前後軸車高h2,h1)が読み込まれる。続くステップA50では、前軸重演算部24が、ステップA40で読み込まれた前軸車高センサ18aの出力電圧を前軸車重マップ29に適用することで、前軸重量WFを算出する。また、後軸重演算部25が、ステップA40で読み込まれた後軸車高センサ18bの出力電圧を車重マップ29に適用することで後軸重量WRを算出すると共に、前軸重量WF及び後軸重量WRを合算した値を車両総重量Wとして算出する。
【0051】
ステップA60では、ブレーキペダル踏力センサ17により、ブレーキペダル操作に基づくブレーキスイッチがオンになったか否かが判定される。ここで、ブレーキスイッチがオンであればブレーキスイッチが操作されているということであり、この場合は(ステップA60のYesルート)、ステップA70へ進む。一方、ブレーキペダルが操作されていない場合には(ステップA60のNoルート)、ステップA10へ戻る。
【0052】
ステップA70では、EVECU3によって、ブレーキペダル踏力センサ17により検出されたブレーキペダル踏力F及び加速度センサ1で検出された制動減速度GRが読み込まれる。
ステップA80では、前輪側機械的制動トルク推定部21が、ブレーキペダル踏力Fを、ブレーキペダル踏力Fと前輪側機械的制動トルクTmFとの関係を規定する前輪側機械的制動トルクマップ(第2機械的制動トルクマップ;図3)28に適用することで、前輪側機械的制動トルクTmFを推定する。また、後輪側機械的制動トルク推定部22が、ブレーキペダル踏力Fを、ブレーキペダル踏力Fと後輪側機械的制動トルクTmRとの関係を規定する後輪側機械的制動トルクマップ(第1機械的制動トルクマップ;図3)28に適用することで、後輪側機械的制動トルクTmRを推定する。
【0053】
その後、ステップA90では、後輪側理想制動トルク推定部20が、ステップA80で設定された前輪側機械的制動トルクTmFに基づいて、前輪側機械的制動トルクTmFが前輪側理想制動トルクTIFと同値(TmF=TIF)となるときの、後輪側理想制動トルクTIRを推定算出する。具体的には、後輪側理想制動トルク推定部20が、前輪側機械的制動トルクTmFを理想制動トルクマップ30(図6参照)に適用することで、第1理想制動トルクTIRを推定算出する。
【0054】
そして、ステップA100では、目標回生制動トルク推定部23が、目標回生制動トルクTC(=TIR−TmR)を推定算出する。
その後、ステップA110では、目標回生制動トルク推定部23によって、ステップA100で算出された目標回生制動トルクTCとなるように、モータ14の回生制動トルク量が制御される。
【0055】
そして、ステップA120では、理想減速度推定部26が、前輪側理想制動トルクTIF及び後輪側理想制動トルクTIRにおける減速度である理想減速度GXを推定算出する。
その後、ステップA130では、目標回生制動トルク補正部27によって、減速度差GXR(GX−GR)が読み込まれる。そして、この減速度差GXRの絶対値|GXR|が、所定範囲ΔG以上である場合にはステップA140へ進む(ステップA130のYesルート)。一方、減速度差GXRの絶対値|GXR|が、所定範囲ΔGより小さい場合には、ステップA60に戻る(ステップA130のNoルート)。これは、図7に示すように、|GXR|がΔGに収まっている場合には、Kwが1.0であって、このKwによるW,WF,WRの補正が不要なためである。
【0056】
そして、ステップA140では、目標回生制動トルク補正部27が、減速度差GXRを補正マップ31に適用することで、荷重補正係数Kwを読み込む。
続くステップA150では、目標回生制動トルク補正部27が、ステップA140で読み込まれた荷重補正係数Kwに基づき、車両総重量W,前軸重量WF,後軸重量WRについて、上記の式(1),(2)及び(3)を用いて補正制御を実施し、ステップA60へ戻る。
【0057】
以上の通り、ステップA60〜A150のフローが繰り返されることで、目標回生制動トルクTCの補正を行うと共に、電気自動車10に作用させる制動トルクにつき、ドライバに対して違和感のない範囲に保つ制御が実施される。
【0058】
[4.効果]
この様に、本実施形態に係る回生制動制御装置では、後輪側機械的制動トルクTmRが後輪側理想制動トルクTIRよりも小さく設定され、且つ、目標回生制動トルクTCが後輪側機械的制動トルクTmRから後輪側理想制動トルクTIRを減算して得られるようになっている。これにより、電気自動車10の減速を確実に実現しながら回生発電の効率を高めることができ、且つ、電気自動車10の制動が後輪11bと路面間の最大摩擦力で行われた場合にも、減速時における後輪11bのロックを確実に回避することが可能となるので、ドライバに不安や違和感を与えることなく、回生制動制御を実施することができる。
【0059】
また、理想制動トルクマップ30を用いることで、複雑な演算をすることなく、迅速且つ確実に後輪側理想制動トルクTIRを得ることができる。
また、本回生制動制御装置によれば、制動減速度GRと前軸重量WFと後軸重量WRとに基づいて、後輪側理想制動トルクTIR及び前輪側理想制動トルクTIFを正確に得ることができる。
【0060】
また、車重マップ29を用いることで、複雑な演算をすることなく、迅速且つ確実に前軸重量WF及び後軸重量WRを得ることができる。
また、ドライバの減速意思が即座に反映されるブレーキペダル踏力Fが直接検出されるようになっているため、前後輪側機械式ブレーキ装置15a,15bのブレーキ油圧やキャリパ(図示略)の変位量を検出するよりも早いタイミングでドライバの減速意思を検出することが可能となり、迅速且つ確実に前輪側機械的制動トルクTmF及び後輪側機械的制動トルクTmRを推定することができる。また、機械的制動トルクマップ28を用いることで、複雑な演算をすることなく、迅速且つ確実に前輪側機械的制動トルクTmF及び後輪側機械的制動トルクTmRを得ることができる。
【0061】
また、機械的制動トルク直線Bの傾きを、ゼットクリティカルZでの理想減速度GXが1.1となるように設定することで、後輪側機械的制動トルクTmRと後輪側理想制動トルクTIRとの差を比較的大きくすることができ、回生効率を高めることができる。
また、補正マップ31は、理想減速度GXと制動減速度GRとの差の絶対値が設定された所定範囲の値ΔG以上である場合に、目標回生制動トルクTCの補正制御を実施するようになっているため、理想減速度GXと制動減速度GRとの差が小さく、前後輪側理想制動トルクTIF,TIRを補正が必要でない場合に、補正制御が行われることを防ぐことで、電気自動車10の走行環境に適合する目標回生制動トルクを迅速且つ確実に得ることができる。
【0062】
また、イグニッションスイッチがオンであるか否か、及び、車速Vが0であるか否かが判断されるため、人の乗降が行われる電気自動車10の停止時など、本体的に回生制動が不要なときに回生制動制御が行われることを防ぐ、即ち、必要な時期に回生制動制御を確実に実施することができる。
【0063】
[6.その他]
以上、本発明の一実施形態について説明したが、本発明は上述の実施形態に限定されるものではなく、本発明の趣旨を逸脱しない範囲で種々変形して実施することができる。
上述の実施形態では、迅速な制御を実現すべく、ブレーキペダルの踏力Fを、ブレーキペダル踏力センサ17により直接検出しているが、ブレーキペダル踏力センサ17の代わりに、ブレーキ液圧センサを用いることも可能である。その場合、ブレーキマスターシリンダー8とH/U16とを接続する油圧配管上には、ブレーキペダル9の踏み込みの有無及びブレーキペダル9の踏み込みによって生じるマスターシリンダー8内のブレーキ液圧を検出するブレーキ液圧センサ(図示略)が介装されることになる。そして、ここでの検出情報はEVECU3へ入力されることになる。
【0064】
また、上述の実施形態では、ゼットクリティカルZでの理想減速度GXが1.1となる場合について説明したが、これに限定されるものではない。例えば、図6に示すように、電動発電機の回生制動トルクが最大となる場合の減速度を超えない範囲で機械的制動トルク直線Bを適宜、設定することが可能である。なぜならば、いかなる機械的制動トルク設定範囲であっても、目標回生制動トルクTCが0とならない限り、モータ14の回生制動トルクを得ることができるからである。なお、目標回生制動トルクTCをより大きく設定するため、ゼットクリティカルZは1.0以上であることが好ましい。より具体的には、本実施形態における電動発電機14の仕様では、回生制動トルクの最大値となる場合の減速度が2.4になるため、ゼットクリティカルZは1.0〜2.4の範囲で設定することとなる。
【0065】
また、上述の実施形態では、車速閾値Vthの値を0としたが、この値に限るものではない。つまり、車速閾値Vthは人の乗降が行われる時、即ち、電気自動車10が停止している時は回生制動制御が行われないようにするために設けられた値であるため、かかる内容を判断可能な値であればよい。
また、上述の実施形態では、後輪駆動の電気自動車について説明したが、前輪駆動の電気自動車に対しても、四輪駆動の電気自動車に対しても本発明を適用することが可能である。
【産業上の利用可能性】
【0066】
本発明は、車両の製造産業などに利用可能である。
【符号の説明】
【0067】
1 加速度センサ(実減速度検出手段)
2 回生制動制御部(回生制動制御手段)
10 電気自動車(電気自動車)
11a 前輪(前輪)
11b 後輪(後輪,駆動輪)
13 速度センサ(車速検出手段)
14 モータ(電動発電機)
15a 前輪側機械式ブレーキ装置(第2摩擦制動装置)
15b 後輪側機械式ブレーキ装置(第1摩擦制動装置)
17 ブレーキペダル踏力センサ(ブレーキペダル踏力検出手段)
18a 前軸車高センサ(第2車高検出手段)
18b 後軸車高センサ(第1車高検出手段)
19 前輪側理想制動トルク推定部(第2理想制動トルク推定手段)
20 後輪側理想制動トルク推定部(第1理想制動トルク推定手段)
21 前輪側機械的制動トルク推定部(第2機械的制動トルク設定手段)
22 後輪側機械的制動トルク推定部(第1機械的制動トルク設定手段)
23 目標回生制動トルク推定部(目標回生制動トルク推定手段)
24 前軸車重演算部(第2車重演算手段)
25 後軸車重演算部(第1車重演算手段)
26 理想減速度推定部(理想減速度推定手段)
27 目標回生制動トルク補正部(目標回生制動トルク補正手段)
28 機械的制動トルクマップ(第1機械的制動トルクマップ,第2機械的制動トルクマップ)
29 重量マップ(第1車重マップ,第2車重マップ)
GR 制動減速度(実減速度)
GX 理想減速度(理想減速度)
WF 前軸重量(第2車重)
WR 後軸重量(第1車重)
h2 前軸車高(第2車高)
h1 後軸車高(第1車高)
V 車速(車速)
Vth 車速閾値(車速閾値)
F ブレーキペダル踏力(ブレーキペダル踏力)
TC 目標回生制動トルク(目標回生制動トルク)
TIF 前輪側理想制動トルク(第2理想制動トルク)
TIR 後輪側理想制動トルク(第1理想制動トルク)
TmF 前輪側機械的制動トルク(第2機械的制動トルク)
TmR 後輪側機械的制動トルク(第1機械的制動トルク)
【技術分野】
【0001】
本発明は、車輪に回生駆動される電動発電機及びこの車輪を制動する摩擦制動装置を有する電気自動車において、電動機の回生制動トルク量を制御する回生制動制御装置に関する。
【背景技術】
【0002】
電動機を動力源として車輪を駆動する電気自動車では、制動時における駆動輪のトルクを利用して電動機で発電し、電力を回生する制御(以下「回生制動制御」という)が行われている。回生制動制御によってバッテリに吸収される回生制動トルクは、車輪に併設されたディスクブレーキ装置やドラムブレーキ装置等の摩擦制動装置で消費される摩擦制動トルクと併せて、車両を制動するトルク(以下「制動トルク」という)として働くことになる。このように、車輪に回生制動トルクと摩擦制動トルクとを作用させて制動する際に、回生制動トルク量を制御することによって、制動時のエネルギ回収効率を向上させる技術が提案されている。
【0003】
例えば、以下の特許文献1には、制動時の電動駆動輪のロック傾向に応じて電動駆動輪への回生制動トルクを制御する技術が開示されている。この技術では、アンチスキッド制御の開始を遅らせ、その間も回生制動を継続してエネルギ回収効率を向上することが可能であるとされている。
また、以下の特許文献2には、制動モードが切り替え可能な車両用制動装置において、制御モードの切り替えをブレーキペダルの踏力に応じて行う技術が開示されている。この技術では、ブレーキペダルの踏力が所定値以下の通常制動時には回生優先モードが選択されると共に、ブレーキペダルの踏力が所定値以上となる急制動時には通常モードへのモード切り替えが行われるようになっている。その結果、回生制動時の電動駆動輪のロックが防止されて回生制動が継続できるようになるため、エネルギ回収効率を向上することが可能であるとされている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2003−174703号公報
【特許文献2】特開平5−161213号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、特許文献1及び2の技術は、回生制動トルクを継続させるため、回生制動時の電動駆動輪がロック傾向にある場合にはモード切替で回生制動のタイミングを制御しようとするものである。つまり、ロック傾向にある場合に回生制動トルクを継続させることで、エネルギ回収効率を良好させようとするものではあるが、回生制動時における回生制動トルク量そのものを設定・制御するものではない。
【0006】
したがって、特許文献1及び2の技術では、時々刻々と変化する電気自動車の走行状況に合わせて回生制動による良好なエネルギ回収効率を実現することは難しい。
本発明はこのような課題に鑑みてなされたもので、回生制動によるエネルギ回収効率を向上させることができるようにした、電気自動車の回生制動制御装置を提供することを目的とする。
【課題を解決するための手段】
【0007】
本発明の電気自動車の回生制動制御装置(請求項1)は、電気自動車の回生制動制御装置であって、該電気自動車の駆動輪と接続された電動発電機と、該駆動輪を機械的に制動する第1摩擦制動装置と、該駆動輪の制動が、路面と該駆動輪との間の最大摩擦力でなされたと仮定した時の制動トルクである第1理想制動トルクを推定する第1理想制動トルク推定手段と、該第1摩擦制動装置による機械的な制動トルクを第1機械的制動トルクとして推定する第1機械的制動トルク推定手段と、該電動発電機を発電機として用いることで得られる回生制動トルクの目標を目標回生制動トルクとして推定する目標回生制動トルク推定手段と、該目標回生制動トルクの範囲内で該電動発電機による該回生制動トルクを調整する回生制動制御を実行する回生制動制御手段とを備え、該第1機械的制動トルク推定手段は、該第1機械的制動トルクが該第1理想制動トルクよりも小さくなるように設定し、該目標回生制動トルク推定手段は、該第1理想制動トルク推定手段によって推定された該第1理想制動トルクと、該第1機械的制動トルク推定手段によって推定された該第1機械的制動トルクとの差を該目標回生制動トルクとして算出することを特徴としている。
【0008】
また、本発明の電気自動車の回生制動制御装置(請求項2)は、請求項1記載の内容において、該駆動輪としての後輪と、該電気自動車の前輪を機械的に制動する第2摩擦制動装置と、前輪の制動が、路面と該駆動輪との間の最大摩擦力でなされたと仮定した時の制動トルクである第2理想制動トルクを推定する第2理想制動トルク推定手段と、該第1理想制動トルクと該第2理想制動トルクとの関係を規定する理想制動トルクマップとを備え、該第1理想制動トルク推定手段は、該第2理想制動トルク推定手段によって推定された該第2理想制動トルクを該理想制動トルクマップに適用することで該第1理想制動トルクを推定することを特徴としている。
【0009】
また、本発明の電気自動車の回生制動制御装置(請求項3)は、請求項2記載の内容において、該電気自動車の実減速度を検出する実減速度検出手段と、該後輪が支持する該電気自動車の車重を第1車重として推定する第1車重演算手段と、該前輪が支持する該電気自動車の車重を第2車重として推定する第2車重演算手段とを備え、該第1理想制動トルク推定手段は、該実減速度検出手段によって検出された該実減速度と該第1車重演算手段によって推定された該第1車重と該第2車重演算手段によって推定された該第2重量とに基づいて該第1理想制動トルクを推定し、該第2理想制動トルク推定手段は、該実減速度検出手段によって検出された該実減速度と該第1車重演算手段によって推定された該第1車重と該第2車重演算手段によって推定された該第2車重とに基づいて該第2理想制動トルクを推定することを特徴としている。
【0010】
また、本発明の電気自動車の回生制動制御装置(請求項4)は、請求項3記載の構成に加え、該後輪側における該電気自動車の車高を第1車高として検出する第1車高検出手段と、該前輪側における該電気自動車の車高を第2車高として検出する第2車高検出手段と、該第1車高と該第1車重との関係を規定する第1車重マップと、該第2車高と該第2車重との関係を規定する第2車重マップとを備え、該第1車重演算手段は、該第1車高検出手段によって検出された該第1車高を該第1車重マップに適用することで該第1車重を演算し、該第2車重演算手段は、該第2車高検出手段によって検出された該第2車高を該第2車重マップに適用することで該第2車重を演算することを特徴としている。
【0011】
また、本発明の電気自動車の回生制動制御装置(請求項5)は、請求項1〜4の何れか1項に記載の構成に加え、該第2摩擦制動装置による機械的制動トルクを第2機械的制動トルクとして推定する第2機械的制動トルク推定手段と、該車両のブレーキペダルの踏力を検出するブレーキペダル踏力検出手段と、該ブレーキペダル踏力と該第1機械的制動トルクとの関係を規定する第1機械的制動トルクマップと、該ブレーキペダル踏力と該第2機械的制動トルクとの関係を規定する第2機械的制動トルクマップとを備え、該第2機械的制動トルク推定手段は、該ブレーキペダル踏力検出手段によって検出された該ブレーキペダル踏力を該第2機械的制動トルクマップに適用することで該第2機械的制動トルクを演算し、該第1機械的制動トルク推定手段は、該ブレーキペダル踏力検出手段によって検出された該ブレーキペダル踏力を該第1機械的制動トルクマップに適用することで該第1機械的制動トルクを演算することを特徴としている。
【0012】
また、本発明の電気自動車の回生制動制御装置(請求項6)は、請求項1〜5の何れか1項に記載の構成に加え、該第1機械的制動トルクマップ及び該第2機械的制動トルクマップには、該第1機械的制動トルクと該第1理想制動トルクが同値となり且つ該第2機械的制動トルクと該第2理想制動トルクが同値となる場合の減速度が、該電動発電機の最大回生トルクとなる範囲で、該第1機械的制動トルクと該第2機械的制動トルクとの関係が規定されていることを特徴としている。
【0013】
また、本発明の電気自動車の回生制動制御装置(請求項7)は、請求項1〜6の何れか1項に記載の構成に加え、該回生制動制御手段は、該第1理想制動トルク及び該第2理想制動トルクで制動を行った場合、該車両で生じる減速度である理想減速度を推定する理想減速度推定手段と、該理想減速度推定手段によって検出された該理想減速度と実減速度検出手段によって検出された該実減速度との差の絶対値が、設定された所定範囲の値から外れた場合に、該目標回生制動トルクを補正する補正制御を実施する目標回生制動トルク補正手段とを備えていることを特徴としている。
【0014】
また、本発明の電気自動車の回生制動制御装置(請求項8)は、請求項1〜7の何れか1項に記載の構成に加え、該回生制動制御手段は、該電気自動車の車速を検出する車速検出手段を備え、該車速検出手段により検出された該車速が、設定された車速閾値でない場合に回生制動制御を実施することを特徴としている。
【発明の効果】
【0015】
本発明の電気自動車の回生制動制御装置(請求項1)によれば、電気自動車の減速を確実に実現しながら、エネルギ回生効率を向上させることができる。また、電気自動車の制動が駆動輪と路面間の最大摩擦力で行われた場合にも減速時における駆動輪のロックを確実に回避することが可能となるので、滑りやすい路面においてもドライバに不安や違和感を与えることなく、回生制動制御を実施することができる。
【0016】
また、本発明の電気自動車の回生制動制御装置(請求項2)によれば、理想制動トルクマップを用いることで、複雑な演算をすることなく、迅速且つ確実に後輪の理想制動トルク、即ち、第1理想制動トルクを得ることができる。
また、本発明の電気自動車の回生制動制御装置(請求項3)によれば、実減速度と第1車重と第2車重とに基づいて後輪の理想制動トルク、即ち、第1理想制動トルクを正確に得ることができ、且つ、実減速度と第1車重および第2車重とに基づいて前輪の理想制動トルク、即ち、第2理想制動トルクも正確に得ることができる。
【0017】
また、本発明の電気自動車の回生制動制御装置(請求項4)によれば、第1車重マップを用いることで、複雑な演算をすることなく、迅速且つ確実に後輪側の車重、即ち、第1車重を得ることができる。同様に、第2車重マップを用いることで、複雑な演算をすることなく、迅速且つ確実に前輪側の車重、即ち、第2車重を得ることができる。
また、本発明の電気自動車の回生制動制御装置(請求項5)によれば、ドライバの減速意思が素早く反映されるブレーキペダル踏力が直接検出されるようになっているため、ドライバの減速意思を迅速に検出することが可能となり、迅速且つ確実に第1機械的制動トルク及び第2機械的制動トルクを推定することができる。また、第1機械的制動トルクマップを用いることで、複雑な演算をすることなく、迅速且つ確実に第1機械的制動トルクを得ることができる。同様に、第2機械的制動トルクマップを用いることで、複雑な演算をすることなく、迅速且つ確実に第2機械的制動トルクを得ることができる。
【0018】
また、本発明の電気自動車の回生制動制御装置(請求項6)によれば、第1機械的制動トルクと第1理想制動トルクとの差を比較的大きくすることができるため、回生効率を高めることができる。
また、本発明の電気自動車の回生制動制御装置(請求項7)によれば、理想減速度と実減速度との差の絶対値が設定された所定範囲の値以上である場合に、電気自動車の制動効果を所定範囲に確保しながら目標回生制動トルクの補正制御を実施するようになっているため、電気自動車の走行状況に適合する目標回生制動トルクを迅速且つ確実に得ることができる。
【0019】
また、本発明の電気自動車の回生制動制御装置(請求項8)によれば、車速が設定された所定値でない場合に、回生制動制御を実施するようになっている。したがって、電気自動車が停止している場合は回生制動制御が行われることはなく、回生制動制御が必要な時期に確実に実施することができる。
【図面の簡単な説明】
【0020】
【図1】本発明の一実施形態に係る電気自動車の回生制動制御装置が適用された車両の全体構成を示す模式図である。
【図2】本発明の一実施形態に係る電気自動車の回生制動制御装置の要部構成を模式的に示すブロック図である。
【図3】本発明の一実施形態に係る電気自動車の回生制動制御装置で用いられるペダル踏力と前後輪制動トルクとの関係を規定するマップである。
【図4】本発明の一実施形態に係る電気自動車の回生制動制御装置による車両重量の推定に用いられ、車高センサの出力電圧と車両重量との関係を規定するマップである。
【図5】本発明の一実施形態に係る電気自動車の回生制動制御装置による電気自動車の重心高さの推定に用いられ、車重重量と重心高さとの関係を規定するマップである。
【図6】本発明の一実施形態に係る電気自動車の回生制動制御装置に用いられる前輪制動トルクと後輪制動トルクの関係を規定するマップである。
【図7】本発明の一実施形態に係る電気自動車の回生制動制御装置による重量補正方法に用いられるマップである。
【図8】本発明の一実施形態に係る電気自動車の回生制動制御装置による制御手順を模式的に示すフローチャートである。
【発明を実施するための形態】
【0021】
[1.全体構成]
本実施形態の回生制動制御装置は、電気自動車10に適用されている。図1に示すように、この電気自動車10は、前側の車輪(前輪)11a及び後側の車輪(後輪)11bを有している。前輪11aには前輪側機械式ブレーキ装置(第2摩擦制動装置)15aが設けられ、後輪11bには後輪側機械式ブレーキ装置(第1摩擦制動装置)15bが設けられている。また、この電気自動車10は、後輪11bの二輪がギヤボックス12を介してモータ(電動発電機)14と機械的に接続され、これらの後輪11bがモータ14によって駆動されるようになっている。
【0022】
また、図1及び図2に示すように、この電気自動車10には、制動制御に係る電子制御ユニットとして、EVECU(Electric Vehicle Electronic Control Unit)3,MCU(Motor Control Unit)4及びASCU(Active Stability Control Unit)5が設けられている。これらの各電子制御ユニット3,4,5は、マイクロコンピュータで構成された電子制御装置であり、マイクロプロセッサやメモリ等を集積したLSIデバイスとして提供されている。
【0023】
EVECU3には、電気自動車10の車体に作用する前後方向の制動減速度(実減速度)GRを検出する加速度センサ(実減速度検出手段)1,ブレーキペダル9の踏み込みの有無及びブレーキペダルの踏み込み力を検出するブレーキペダル踏力センサ(ブレーキペダル踏力検出手段)17,前輪11aにおける電気自動車10の車高である前軸車高(第2車高)h2を検出する前軸車高センサ(第2車高検出手段)18a及び後輪11bにおける電気自動車10の車高である後軸車高(第1車高)h1を検出する後軸車高センサ(第1車高検出手段)18bが接続されている。そして、これらの検出情報はEVECU3へ入力されるようになっている。
【0024】
また、各車輪11a,11bには、その回転数を検出する速度センサ(車速検出手段)13が設けられている。この速度センサ13により検出された各車輪11a,11bの回転数は、ASCU5へ入力されるようになっている。なお、ASCU5は入力された各車輪11a,11bの回転数に基づいて車速Vを算出しており、ここで算出された車速VもEVECU3へ入力されるようになっている。
【0025】
また、EVECU3は、MCU4及びASCU5よりも上位の電子制御ユニットである。すなわち、EVECU3はMCU4及びASCU5を統括管理する機能を有しており、MCU4及びASCU5で実施される制御のタイミングや制御量の設定,指示を管轄としている。
MCU4は、EVECU3からの指示を受けて具体的な制御電圧,制御電流の値を演算し、モータ14へ制御信号を送信するものである。なおモータ14は、MCU4からの制御信号に応じて、電動機としても発電機としても機能するようになっている。
【0026】
ASCU5は、EVECU3からの指示を受けてH/U(Hydraulic Unit;油圧制御ユニット)16を制御し、各車輪11a,11bの各々の機械式ブレーキ装置15a,15bを個別に制御するものである。これにより、ASCU5は所謂ASC機能を備えており、各車輪11a,11bのグリップ力に応じた制動力を各車輪11a,11bへ付与して姿勢の安定性を向上させることができるようになっている。
【0027】
H/U16は各機械式ブレーキ装置15a,15bへ導入されるブレーキ液圧を制御するアクチュエータである。このH/U16は油圧配管でブレーキマスターシリンダー8に接続されており、ブレーキペダル9の踏み込みによってブレーキブースター7を介して入力されたブレーキ液圧を受けて、各機械式ブレーキ装置15a,15bを制御するようになっている。
【0028】
[2.EVECU]
電気自動車10の回生制動時における回生制動制御に係る制御構成について詳述する。
EVECU3は、図示しないアクセルペダルが放された時およびブレーキペダル9が踏み込まれているときには、エンジンを動力とする一般的な車両におけるエンジンブレーキに相当する大きさの回生トルク量を設定し、モータ14を制御するようになっている。また、より回生効率を高めるためには、回生トルク量をできるだけ増大させる必要がある。しかし、回生トルク量の設定が大きすぎれば、過剰に制動力が作用することになり、電気自動車10を運転するドライバに対しても、ドライバの意に反した過剰な制動力が及び得ることになる。それにより、ドライバの操作フィーリングが損なわれることになる。そこで、このEVECU3では、ドライバを含む電気自動車10の乗員に不安や違和感を与えるようにしない範囲で、できるだけ回生効率を高めるように、MCU4を介してモータ14の回生トルク量を制御するようになっている。
【0029】
EVECU3のメモリは、いずれもプログラムソフトとして、前輪側理想制動トルク推定部(第2理想制動トルク推定手段)19,後輪側理想制動トルク推定部(第1理想制動トルク推定手段)20,前輪側機械的制動トルク推定部(第2機械的制動トルク推定手段)21,後輪側機械的制動トルク推定部(第1機械的制動トルク推定手段)22,目標回生制動トルク推定部(目標回生制動トルク推定手段)23,回生制動制御部(回生制動制御手段)2,前軸車重演算部(第2車重演算手段)24,後軸車重演算部(第1車重演算手段)25,理想減速度推定部(理想減速度推定手段)26及び目標回生制動トルク補正部(目標回生制動トルク補正手段)27を備えている。
【0030】
[2−1.前輪側機械的制動トルク推定部21,後輪側機械的制動トルク推定部22]
EVECU3のメモリには、図3に示す機械的制動トルクマップ28(第1機械的制動トルクマップ,第2機械的制動トルクマップ)が記録されている。この機械的制動トルクマップ28には、前輪側機械式ブレーキ装置15aによる機械的制動トルクの推定実力値である前輪側機械的制動トルク(第2機械的制動トルク)TmFとブレーキペダル踏力Fとの対応関係、及び、後輪側機械式ブレーキ装置15bによる機械的制動トルクの推定実力値である後輪側機械的制動トルク(第1機械的制動トルク)TmRとブレーキペダル踏力Fとの対応関係が規定されている。この機械的制動トルクマップ28には、ブレーキペダル踏力Fが大きくなるにしたがい、前後輪側機械的制動トルクTmF,TmRも大きくなる特性が規定されている。また、機械的制動トルクマップ28は、回生制動時には、後輪側よりも前輪側の方に、より大きな負荷が加えられることとなるため、後輪側機械的制動トルクTmRよりも前輪側機械的制動トルクTmFの方が大きくなるように設定されている。なお、ブレーキペダル踏力FがF1である場合に、前輪側機械的制動トルクTmF及び後輪側機械的制動トルクTmRの変化割合が急変するのは、ブレーキブースター7の性能に起因するものである。
【0031】
前輪側機械的制動トルク推定部21は、ブレーキペダル踏力センサ17により検出されたブレーキペダル踏力Fを、この機械的制動トルクマップ28に適用することで、前輪側機械的制動トルクTmFを求めるようになっている。
同様に、後輪側機械的制動トルク推定部22は、ブレーキペダル踏力センサ17により検出されたブレーキペダル踏力Fを、この機械的制動トルクマップ28に適用することで、後輪側機械的制動トルクTmRを求めるようになっている。
そして、前輪側機械的制動トルク推定部21によって得られた前輪側機械的制動トルクTmF、及び、後輪側機械的制動トルク推定部22によって得られた後輪側機械的制動トルクTmRは後述するEVECU3の目標回生制御トルク推定部23に送られるようになっている。
【0032】
[2−2.前軸車重演算部24,後軸車重演算部25]
EVECU3のメモリには、図4に示す車重マップ(第1車重マップ,第2車重マップ)29が記録されている。この車重マップ29には、前軸車高センサ18aの出力電圧及び前軸重量(第2車重)WFとの対応関係、及び、後軸車高センサ18bの出力電圧及び後軸重量(第1車重)WRとの対応関係が規定されている。
【0033】
前軸車重演算部24は、前軸車高センサ18aによって検出された前輪11aにおける電気自動車10の車高(第2車高)h2を、この車重マップ29に適用することで、前輪11aが支持する電気自動車10の重量(前軸重量)WFを求めるようになっている。
同様に、後軸車重演算部25は、後軸車高センサ18bによって検出された後輪11bにおける電気自動車の車高(第1車高)h1を、この重量マップ29に適用することで、後輪11bが支持する電気自動車10の重量(後軸重量)WRを求めるようになっている。
【0034】
また、後軸車重演算部25は、前軸重量WF及び後軸重量WRを合算することによって、車体重量に乗員や積荷等の重量を加算した実総重量である電気自動車10の車両総重量Wを求められるようになっている。さらに、後軸車重演算部25は、前軸重量WF及び後軸重量WRにより、各車輪11a,11bの接地面(即ち、路面)から電気自動車10全体の重心までの高さで(重心高さ)Hを求めるようになっている。具体的には、EVECU3のメモリには、図5に示す重心高さマップ32が記録されている。この重心高さマップ32には、車両総重量W(前軸重量WF+後軸重量WR)と重心高さHとの対応関係が規定されている。この重心高さマップ32には、車両総重量Wが大きくなるにしたがい、重心高さHも大きくなる特性が規定されている。後軸車重演算部25は、車両総重量Wをこの重心高さマップ32に適用することで、重心高さHを求めるようになっている。
【0035】
さらに、これらの前軸車重演算部24及び後軸車重演算部25は、後述する目標回生制動トルク補正部27によって演算された荷重補正係数Kwに基づき、以下の式(1),(2)及び(3)を用いて荷重補正後の前軸重量WFc,荷重補正後の後軸重量WRc,荷重補正後の車両総重量Wcを演算するようになっている。
WFc=WF×Kw・・・(1)
WRc=WR×Kw・・・(2)
Wc=WFc+WRc・・・(3)
【0036】
[2−3.前輪側理想制動トルク推定部19,後輪側理想制動トルク推定部20]
前輪側理想制動トルク推定部19は、各種路面で想定される前輪11aと路面の摩擦力との関係において、路面と前輪11aとの間の最大摩擦力でなされたと仮定した時の制動トルク、即ち、前輪11aがロックしない範囲における前輪11aの最大制動トルクである前輪側理想制動トルク(第2理想制動トルク)TIFを推定するものである。より具体的に、この前輪側理想制動トルク推定部19は、以下の式(4)及び(5)を用いて前輪側理想制動トルクTIFを算出するようになっている。
【0037】
なお、上記の式(4)及び(5)において、用いられているパラメータは以下のとおりである。
車両総重量W
前軸重量WF
重心高さH
制動減速度GR
前輪11aの半径Rf
ホイールベースL
また、式(4)において求められるBFは、前輪11aが制動減速度GR相当の摩擦係数の路面で制動されたと仮定した時の制動トルク、即ち、前輪11aがロックしない範囲における前輪11aの最大制動力である前輪側理想制動力である。
【0038】
また、後輪側理想制動トルク推定部20は、後輪11bが各種路面で想定される後輪11bと路面の摩擦力との関係において、路面と後輪11bとの間の最大摩擦力でなされたと仮定した時の制動トルク、即ち、後輪11bがロックしない範囲における後輪11bの最大制動トルクである後輪側理想制動トルク(第1理想制動トルク)TIRを推定するものである。より具体的に、この後輪側理想制動トルク推定部20は、以下の式(6)及び(7)を用いて後輪側理想制動トルクTIRを算出するようになっている。
【0039】
なお、上記の式(6)及び(7)において、用いられているパラメータは以下のとおりである。
車両総重量W
後軸重量WR
重心高さH
制動減速度GR
後輪11bの半径Rr
ホイールベースL
また、式(6)において求められるBRは、後輪11bが制動減速度GR相当の摩擦係数の路面で制動されたと仮定した時の制動トルク、即ち、後輪11bがロックしない範囲における後輪11bの最大制動力である前輪側理想制動力である。
【0040】
図6に示すマップは、前輪側理想制動トルクTIFと後輪側理想制動トルクTIRとの関係は、上記(5)式及び(7)式により、2次曲線(以下「理想制動トルク曲線C」という)で作成されている。また、この理想制動トルク曲線Cは、第1理想制動トルクTIRと第2理想制動トルクTIFとの関係を規定する理想制動トルクマップ(理想制動トルクマップ)30として用いられるようになっている。
【0041】
一方、前輪側機械的制動トルクTmFと後輪側機械的制動トルクTmRとの関係は、図6に示す直線B(以下「機械的制動トルク直線B」という)として規定されている。これは、図3に示すように、ブレーキペダル踏力Fと前後輪側機械的制動トルクTmF,TmRとの関係が、原則的に比例関係にあることに起因している。
【0042】
[2−4.目標回生制動トルク推定部23]
目標回生制動トルク推定部23は、モータ14を発電機として用いることで得られる回生制動トルクの目標である目標回生制動トルク(目標回生制動トルク)TCを推定算出するものである。具体的には、本実施形態では、前輪11aがモータ14と接続されておらず、前輪11a側から回生制動トルクを得ることはできず、後輪11b側からのみ回生制動トルクを得ることとなる。つまり、前輪側理想制動トルクTIFと前輪側機械的制動トルクTmFは常に同値となり、よって、目標回生制動トルク推定部23は、後輪側理想制動トルクTIRと後輪側機械的制動トルクTmRとの差分を目標回生制動トルクTCとして算出するようになっている。
【0043】
[2−5.回生制動制御部2]
回生制動制御部2は、いずれもサブプログラムとして理想減速度推定部26及び目標回生制動トルク補正部27を備えている。
理想減速度推定部26は、上記の式(5)によって得られた前輪側理想制動トルクTIFが前輪11aに作用するとともに、上記の式(7)によって得られた後輪側理想制動トルクTIRが後輪11bに作用した際、電気自動車10に生じる減速度である理想減速度GXを推定するものである。なお、この理想減速度GXは、図6に示す理想制動トルク曲線Cと同一曲線として規定される。
【0044】
また、この理想制動トルクマップ30において、機械的制動トルク直線Bと理想制動トルク曲線Cとの交点Zは、一部の当業者で「ゼットクリティカル」と呼ばれている。このゼットクリティカルZでは、前輪側理想制動トルクTIFと前輪側機械的制動トルクTmFとが同値となり、また、後輪側理想制動トルクTIRと後輪側機械的制動トルクTmRとも同値となる。換言すれば、ゼットクリティカルZは、目標回生制動トルクTCが0となり、回生制動トルクが得られなくなる前輪側機械的制動トルクTmF及び後輪側機械的制動トルクTmRを規定する点である。
【0045】
また、このゼットクリティカルZは、機械的制動トルク直線Bの傾きによって決定される。そして、機械的制動トルク直線Bの傾きが小さい程、ゼットクリティカルZでの理想減速度GXの値が大きくなり、その結果、目標回生制動トルクTCも大きくなる。
ここで、機械的制動トルク直線Bの傾きは、電動発電機14の回生制動トルクの最大値となる場合の減速度(本実施形態においては、2.4程度)を超えない範囲で決定される。なお、本実施形態では、目標回生制動トルクTCを大きくするため、ゼットクリティカルZでの理想減速度GXが1.1となるように機械的制動トルク直線Bを設定している。なお、一般的な車両において、機械的制動トルク直線Bの設定範囲は、機械的制動トルクでの理想減速度GXが0.5〜0.8程度となるように設定されている。
【0046】
また、図7に示すように、EVECU3のメモリには、理想減速度GXと制動減速度GRとの減速度差GXRと荷重補正係数Kwとの対応関係を記述した補正マップ31が記録されている。なお、補正マップ31は、減速度差GXRの絶対値|GXR|が、所定範囲ΔGを超えた場合に、後述する目標回生制動トルク補正部27により荷重補正係数Kwが読み込まれるようになっている。
【0047】
目標回生制動トルク補正部27は、上述した減速度差GXR(即ち、理想減速度GXと制動減速度GRとの差)を演算し、この減速度差GXRを補正マップ31に適用することで、荷重補正係数Kwを求めるものである。
また、前後輪側理想制動トルク推定部19,20は、目標回生制動トルク推定部23によって算出された荷重補正後の車両総重量Wc,荷重補正後の前軸重量WFc,荷重補正後の後軸重量WRcを、それぞれ上記式(1)及び(3)の車両総重量W,前軸重量WF,後軸重量WRに代入することで、荷重補正後の前後輪側理想制動力BFc,BRcが算出されるようになっている。さらに、前後輪側理想制動トルク推定部19,20は、荷重補正後の前後輪側理想制動力BFc,BRcを上記式(2)及(4)に適用することで、荷重補正後の前後輪側理想制動トルクTIFc,TIRcが算出されるようになっている。故に、目標回生制動トルク補正部27によって算出される荷重補正係数Kwに基づいて、前後輪側理想制動トルクTIF,TIRの値が補正され、さらに、目標回生制動トルクTCの補正制御が実施されることになる。
【0048】
[3.フローチャート]
図8を用いて、本回生制動制御装置における制御手順を説明する。このフローは、予め設定された所定の周期で繰り返し実施されている。
まず、ステップA10では、EVECU3によって、イグニッションスイッチが操作されているか否かが判定され、操作されていればステップA20へ進む。一方、イグニッションスイッチが操作されていない場合には、再度、ステップA10へ戻る。
【0049】
ステップA20では、EVECU3によって、ASCU5で算出された車速Vが読み込まれる。続くステップ30では、EVECU3によって、車速Vが車速閾値Vthであるか否かが判定され、車速Vが車速閾値Vthである場合にはステップA40へ進む。一方、車速Vが車速閾値Vthでない場合には、ステップA10へ戻る。なお、車速閾値Vthの値は0に設定されている。
【0050】
ステップA40では、EVECU3によって、前後軸車高センサ18a,18bの出力電圧(即ち、前後軸車高h2,h1)が読み込まれる。続くステップA50では、前軸重演算部24が、ステップA40で読み込まれた前軸車高センサ18aの出力電圧を前軸車重マップ29に適用することで、前軸重量WFを算出する。また、後軸重演算部25が、ステップA40で読み込まれた後軸車高センサ18bの出力電圧を車重マップ29に適用することで後軸重量WRを算出すると共に、前軸重量WF及び後軸重量WRを合算した値を車両総重量Wとして算出する。
【0051】
ステップA60では、ブレーキペダル踏力センサ17により、ブレーキペダル操作に基づくブレーキスイッチがオンになったか否かが判定される。ここで、ブレーキスイッチがオンであればブレーキスイッチが操作されているということであり、この場合は(ステップA60のYesルート)、ステップA70へ進む。一方、ブレーキペダルが操作されていない場合には(ステップA60のNoルート)、ステップA10へ戻る。
【0052】
ステップA70では、EVECU3によって、ブレーキペダル踏力センサ17により検出されたブレーキペダル踏力F及び加速度センサ1で検出された制動減速度GRが読み込まれる。
ステップA80では、前輪側機械的制動トルク推定部21が、ブレーキペダル踏力Fを、ブレーキペダル踏力Fと前輪側機械的制動トルクTmFとの関係を規定する前輪側機械的制動トルクマップ(第2機械的制動トルクマップ;図3)28に適用することで、前輪側機械的制動トルクTmFを推定する。また、後輪側機械的制動トルク推定部22が、ブレーキペダル踏力Fを、ブレーキペダル踏力Fと後輪側機械的制動トルクTmRとの関係を規定する後輪側機械的制動トルクマップ(第1機械的制動トルクマップ;図3)28に適用することで、後輪側機械的制動トルクTmRを推定する。
【0053】
その後、ステップA90では、後輪側理想制動トルク推定部20が、ステップA80で設定された前輪側機械的制動トルクTmFに基づいて、前輪側機械的制動トルクTmFが前輪側理想制動トルクTIFと同値(TmF=TIF)となるときの、後輪側理想制動トルクTIRを推定算出する。具体的には、後輪側理想制動トルク推定部20が、前輪側機械的制動トルクTmFを理想制動トルクマップ30(図6参照)に適用することで、第1理想制動トルクTIRを推定算出する。
【0054】
そして、ステップA100では、目標回生制動トルク推定部23が、目標回生制動トルクTC(=TIR−TmR)を推定算出する。
その後、ステップA110では、目標回生制動トルク推定部23によって、ステップA100で算出された目標回生制動トルクTCとなるように、モータ14の回生制動トルク量が制御される。
【0055】
そして、ステップA120では、理想減速度推定部26が、前輪側理想制動トルクTIF及び後輪側理想制動トルクTIRにおける減速度である理想減速度GXを推定算出する。
その後、ステップA130では、目標回生制動トルク補正部27によって、減速度差GXR(GX−GR)が読み込まれる。そして、この減速度差GXRの絶対値|GXR|が、所定範囲ΔG以上である場合にはステップA140へ進む(ステップA130のYesルート)。一方、減速度差GXRの絶対値|GXR|が、所定範囲ΔGより小さい場合には、ステップA60に戻る(ステップA130のNoルート)。これは、図7に示すように、|GXR|がΔGに収まっている場合には、Kwが1.0であって、このKwによるW,WF,WRの補正が不要なためである。
【0056】
そして、ステップA140では、目標回生制動トルク補正部27が、減速度差GXRを補正マップ31に適用することで、荷重補正係数Kwを読み込む。
続くステップA150では、目標回生制動トルク補正部27が、ステップA140で読み込まれた荷重補正係数Kwに基づき、車両総重量W,前軸重量WF,後軸重量WRについて、上記の式(1),(2)及び(3)を用いて補正制御を実施し、ステップA60へ戻る。
【0057】
以上の通り、ステップA60〜A150のフローが繰り返されることで、目標回生制動トルクTCの補正を行うと共に、電気自動車10に作用させる制動トルクにつき、ドライバに対して違和感のない範囲に保つ制御が実施される。
【0058】
[4.効果]
この様に、本実施形態に係る回生制動制御装置では、後輪側機械的制動トルクTmRが後輪側理想制動トルクTIRよりも小さく設定され、且つ、目標回生制動トルクTCが後輪側機械的制動トルクTmRから後輪側理想制動トルクTIRを減算して得られるようになっている。これにより、電気自動車10の減速を確実に実現しながら回生発電の効率を高めることができ、且つ、電気自動車10の制動が後輪11bと路面間の最大摩擦力で行われた場合にも、減速時における後輪11bのロックを確実に回避することが可能となるので、ドライバに不安や違和感を与えることなく、回生制動制御を実施することができる。
【0059】
また、理想制動トルクマップ30を用いることで、複雑な演算をすることなく、迅速且つ確実に後輪側理想制動トルクTIRを得ることができる。
また、本回生制動制御装置によれば、制動減速度GRと前軸重量WFと後軸重量WRとに基づいて、後輪側理想制動トルクTIR及び前輪側理想制動トルクTIFを正確に得ることができる。
【0060】
また、車重マップ29を用いることで、複雑な演算をすることなく、迅速且つ確実に前軸重量WF及び後軸重量WRを得ることができる。
また、ドライバの減速意思が即座に反映されるブレーキペダル踏力Fが直接検出されるようになっているため、前後輪側機械式ブレーキ装置15a,15bのブレーキ油圧やキャリパ(図示略)の変位量を検出するよりも早いタイミングでドライバの減速意思を検出することが可能となり、迅速且つ確実に前輪側機械的制動トルクTmF及び後輪側機械的制動トルクTmRを推定することができる。また、機械的制動トルクマップ28を用いることで、複雑な演算をすることなく、迅速且つ確実に前輪側機械的制動トルクTmF及び後輪側機械的制動トルクTmRを得ることができる。
【0061】
また、機械的制動トルク直線Bの傾きを、ゼットクリティカルZでの理想減速度GXが1.1となるように設定することで、後輪側機械的制動トルクTmRと後輪側理想制動トルクTIRとの差を比較的大きくすることができ、回生効率を高めることができる。
また、補正マップ31は、理想減速度GXと制動減速度GRとの差の絶対値が設定された所定範囲の値ΔG以上である場合に、目標回生制動トルクTCの補正制御を実施するようになっているため、理想減速度GXと制動減速度GRとの差が小さく、前後輪側理想制動トルクTIF,TIRを補正が必要でない場合に、補正制御が行われることを防ぐことで、電気自動車10の走行環境に適合する目標回生制動トルクを迅速且つ確実に得ることができる。
【0062】
また、イグニッションスイッチがオンであるか否か、及び、車速Vが0であるか否かが判断されるため、人の乗降が行われる電気自動車10の停止時など、本体的に回生制動が不要なときに回生制動制御が行われることを防ぐ、即ち、必要な時期に回生制動制御を確実に実施することができる。
【0063】
[6.その他]
以上、本発明の一実施形態について説明したが、本発明は上述の実施形態に限定されるものではなく、本発明の趣旨を逸脱しない範囲で種々変形して実施することができる。
上述の実施形態では、迅速な制御を実現すべく、ブレーキペダルの踏力Fを、ブレーキペダル踏力センサ17により直接検出しているが、ブレーキペダル踏力センサ17の代わりに、ブレーキ液圧センサを用いることも可能である。その場合、ブレーキマスターシリンダー8とH/U16とを接続する油圧配管上には、ブレーキペダル9の踏み込みの有無及びブレーキペダル9の踏み込みによって生じるマスターシリンダー8内のブレーキ液圧を検出するブレーキ液圧センサ(図示略)が介装されることになる。そして、ここでの検出情報はEVECU3へ入力されることになる。
【0064】
また、上述の実施形態では、ゼットクリティカルZでの理想減速度GXが1.1となる場合について説明したが、これに限定されるものではない。例えば、図6に示すように、電動発電機の回生制動トルクが最大となる場合の減速度を超えない範囲で機械的制動トルク直線Bを適宜、設定することが可能である。なぜならば、いかなる機械的制動トルク設定範囲であっても、目標回生制動トルクTCが0とならない限り、モータ14の回生制動トルクを得ることができるからである。なお、目標回生制動トルクTCをより大きく設定するため、ゼットクリティカルZは1.0以上であることが好ましい。より具体的には、本実施形態における電動発電機14の仕様では、回生制動トルクの最大値となる場合の減速度が2.4になるため、ゼットクリティカルZは1.0〜2.4の範囲で設定することとなる。
【0065】
また、上述の実施形態では、車速閾値Vthの値を0としたが、この値に限るものではない。つまり、車速閾値Vthは人の乗降が行われる時、即ち、電気自動車10が停止している時は回生制動制御が行われないようにするために設けられた値であるため、かかる内容を判断可能な値であればよい。
また、上述の実施形態では、後輪駆動の電気自動車について説明したが、前輪駆動の電気自動車に対しても、四輪駆動の電気自動車に対しても本発明を適用することが可能である。
【産業上の利用可能性】
【0066】
本発明は、車両の製造産業などに利用可能である。
【符号の説明】
【0067】
1 加速度センサ(実減速度検出手段)
2 回生制動制御部(回生制動制御手段)
10 電気自動車(電気自動車)
11a 前輪(前輪)
11b 後輪(後輪,駆動輪)
13 速度センサ(車速検出手段)
14 モータ(電動発電機)
15a 前輪側機械式ブレーキ装置(第2摩擦制動装置)
15b 後輪側機械式ブレーキ装置(第1摩擦制動装置)
17 ブレーキペダル踏力センサ(ブレーキペダル踏力検出手段)
18a 前軸車高センサ(第2車高検出手段)
18b 後軸車高センサ(第1車高検出手段)
19 前輪側理想制動トルク推定部(第2理想制動トルク推定手段)
20 後輪側理想制動トルク推定部(第1理想制動トルク推定手段)
21 前輪側機械的制動トルク推定部(第2機械的制動トルク設定手段)
22 後輪側機械的制動トルク推定部(第1機械的制動トルク設定手段)
23 目標回生制動トルク推定部(目標回生制動トルク推定手段)
24 前軸車重演算部(第2車重演算手段)
25 後軸車重演算部(第1車重演算手段)
26 理想減速度推定部(理想減速度推定手段)
27 目標回生制動トルク補正部(目標回生制動トルク補正手段)
28 機械的制動トルクマップ(第1機械的制動トルクマップ,第2機械的制動トルクマップ)
29 重量マップ(第1車重マップ,第2車重マップ)
GR 制動減速度(実減速度)
GX 理想減速度(理想減速度)
WF 前軸重量(第2車重)
WR 後軸重量(第1車重)
h2 前軸車高(第2車高)
h1 後軸車高(第1車高)
V 車速(車速)
Vth 車速閾値(車速閾値)
F ブレーキペダル踏力(ブレーキペダル踏力)
TC 目標回生制動トルク(目標回生制動トルク)
TIF 前輪側理想制動トルク(第2理想制動トルク)
TIR 後輪側理想制動トルク(第1理想制動トルク)
TmF 前輪側機械的制動トルク(第2機械的制動トルク)
TmR 後輪側機械的制動トルク(第1機械的制動トルク)
【特許請求の範囲】
【請求項1】
電気自動車の回生制動制御装置であって、
該電気自動車の駆動輪と接続された電動発電機と、
該駆動輪を機械的に制動する第1摩擦制動装置と、
該駆動輪の制動が路面と該駆動輪との間の最大摩擦力でなされたと仮定した時の制動トルクである第1理想制動トルクを推定する第1理想制動トルク推定手段と、
該第1摩擦制動装置による機械的制動トルクを第1機械的制動トルクとして推定する第1機械的制動トルク推定手段と、
該電動発電機を発電機として用いることで得られる回生制動トルクの目標を目標回生制動トルクとして推定する目標回生制動トルク推定手段と、
該目標回生制動トルクの範囲内で該電動発電機による該回生制動トルクを調整する回生制動制御を実行する回生制動制御手段とを備え、
該第1機械的制動トルク推定手段は、
該第1機械的制動トルクが該第1理想制動トルクよりも小さくなるように設定し、
該目標回生制動トルク推定手段は、
該第1理想制動トルク推定手段によって推定された該第1理想制動トルクと、該第1機械的制動トルク推定手段によって推定された該第1機械的制動トルクとの差を該目標回生制動トルクとして算出する
ことを特徴とする、電気自動車の回生制動制御装置。
【請求項2】
該駆動輪としての後輪と、
該電気自動車の前輪を機械的に制動する第2摩擦制動装置と、
該前輪の制動が、路面と該前輪との間の最大摩擦力でなされたと仮定した時の制動トルクである第2理想制動トルクを推定する第2理想制動トルク推定手段と、
該第1理想制動トルクと該第2理想制動トルクとの関係を規定する理想制動トルクマップとを備え、
該第1理想制動トルク推定手段は、
該第2理想制動トルク推定手段によって推定された該第2理想制動トルクを該理想制動トルクマップに適用することで該第1理想制動トルクを推定する
ことを特徴とする、請求項1記載の電気自動車の回生制動制御装置。
【請求項3】
該電気自動車の実減速度を検出する実減速度検出手段と、
該後輪が支持する該電気自動車の車重を第1車重として推定する第1車重演算手段と、
該前輪が支持する該電気自動車の車重を第2車重として推定する第2車重演算手段とを備え、
該第1理想制動トルク推定手段は、
該実減速度検出手段によって検出された該実減速度と該第1車重演算手段によって推定された該第1車重と該第2車重演算手段によって推定された該第2車重とに基づいて該第1理想制動トルクを推定し、
該第2理想制動トルク推定手段は、
該実減速度検出手段によって検出された該実減速度と該第1車重演算手段によって推定された該第1車重と該第2車重演算手段によって推定された該第2車重とに基づいて該第2理想制動トルクを推定する
ことを特徴とする、請求項2記載の電気自動車の回生制動制御装置。
【請求項4】
該後輪側における該電気自動車の車高を第1車高として検出する第1車高検出手段と、
該前輪側における該電気自動車の車高を第2車高として検出する第2車高検出手段と、
該第1車高と該第1車重との関係を規定する第1車重マップと、
該第2車高と該第2車重との関係を規定する第2車重マップとを備え、
該第1車重演算手段は、
該第1車高検出手段によって検出された該第1車高を該第1車重マップに適用することで該第1車重を演算し、
該第2車重演算手段は、
該第2車高検出手段によって検出された該第2車高を該第2車重マップに適用することで該第2車重を演算する
ことを特徴とする請求項3記載の電気自動車の回生制動制御装置。
【請求項5】
該第2摩擦制動装置による機械的制動トルクを第2機械的制動トルクとして推定する第2機械的制動トルク推定手段と、
該車両のブレーキペダルの踏力を検出するブレーキペダル踏力検出手段と、
該ブレーキペダル踏力と該第1機械的制動トルクとの関係を規定する第1機械的制動トルクマップと、
該ブレーキペダル踏力と該第2機械的制動トルクとの関係を規定する第2機械的制動トルクマップとを備え、
該第2機械的制動トルク推定手段は、
該ブレーキペダル踏力検出手段によって検出された該ブレーキペダル踏力を該第2機械的制動トルクマップに適用することで該第2機械的制動トルクを演算し、
該第1機械的制動トルク推定手段は、
該ブレーキペダル踏力検出手段によって検出された該ブレーキペダル踏力を該第1機械的制動トルクマップに適用することで該第1機械的制動トルクを演算する
ことを特徴とする、請求項1〜4の何れか1項に記載の電気自動車の回生制動制御装置。
【請求項6】
該第1機械的制動トルクマップ及び該第2機械的制動トルクマップには、
該第1機械的制動トルクと該第1理想制動トルクが同値となり且つ該第2機械的制動トルクと該第2理想制動トルクが同値となる場合の減速度が、該電動発電機の回生制動トルクが最大となる場合の減速度を超えない範囲で、該第1機械的制動トルクと該第2機械的制動トルクとの関係が規定されている
ことを特徴とする、請求項5記載の電気自動車の回生制動制御装置。
【請求項7】
該回生制動制御手段は、
該第1理想制動トルク及び該第2理想制動トルクで制動を行った場合、該車両で生じる減速度である理想減速度を推定する理想減速度推定手段と、
該理想減速度推定手段によって検出された該理想減速度と実減速度検出手段によって検出された該実減速度との差の絶対値が、設定された所定範囲の値から外れた場合に、該目標回生制動トルクを補正する補正制御を実施する目標回生制動トルク補正手段とを備えている
ことを特徴とする、請求項1〜6の何れか1項に記載の電気自動車の回生制動制御装置。
【請求項8】
該回生制動制御手段は、
該電気自動車の車速を検出する車速検出手段を備え、
該車速検出手段により検出された該車速が、設定された車速閾値でない場合に回生制動制御を実施する
ことを特徴とする、請求項1〜7の何れか1項に記載の電気自動車の回生制動制御装置。
【請求項1】
電気自動車の回生制動制御装置であって、
該電気自動車の駆動輪と接続された電動発電機と、
該駆動輪を機械的に制動する第1摩擦制動装置と、
該駆動輪の制動が路面と該駆動輪との間の最大摩擦力でなされたと仮定した時の制動トルクである第1理想制動トルクを推定する第1理想制動トルク推定手段と、
該第1摩擦制動装置による機械的制動トルクを第1機械的制動トルクとして推定する第1機械的制動トルク推定手段と、
該電動発電機を発電機として用いることで得られる回生制動トルクの目標を目標回生制動トルクとして推定する目標回生制動トルク推定手段と、
該目標回生制動トルクの範囲内で該電動発電機による該回生制動トルクを調整する回生制動制御を実行する回生制動制御手段とを備え、
該第1機械的制動トルク推定手段は、
該第1機械的制動トルクが該第1理想制動トルクよりも小さくなるように設定し、
該目標回生制動トルク推定手段は、
該第1理想制動トルク推定手段によって推定された該第1理想制動トルクと、該第1機械的制動トルク推定手段によって推定された該第1機械的制動トルクとの差を該目標回生制動トルクとして算出する
ことを特徴とする、電気自動車の回生制動制御装置。
【請求項2】
該駆動輪としての後輪と、
該電気自動車の前輪を機械的に制動する第2摩擦制動装置と、
該前輪の制動が、路面と該前輪との間の最大摩擦力でなされたと仮定した時の制動トルクである第2理想制動トルクを推定する第2理想制動トルク推定手段と、
該第1理想制動トルクと該第2理想制動トルクとの関係を規定する理想制動トルクマップとを備え、
該第1理想制動トルク推定手段は、
該第2理想制動トルク推定手段によって推定された該第2理想制動トルクを該理想制動トルクマップに適用することで該第1理想制動トルクを推定する
ことを特徴とする、請求項1記載の電気自動車の回生制動制御装置。
【請求項3】
該電気自動車の実減速度を検出する実減速度検出手段と、
該後輪が支持する該電気自動車の車重を第1車重として推定する第1車重演算手段と、
該前輪が支持する該電気自動車の車重を第2車重として推定する第2車重演算手段とを備え、
該第1理想制動トルク推定手段は、
該実減速度検出手段によって検出された該実減速度と該第1車重演算手段によって推定された該第1車重と該第2車重演算手段によって推定された該第2車重とに基づいて該第1理想制動トルクを推定し、
該第2理想制動トルク推定手段は、
該実減速度検出手段によって検出された該実減速度と該第1車重演算手段によって推定された該第1車重と該第2車重演算手段によって推定された該第2車重とに基づいて該第2理想制動トルクを推定する
ことを特徴とする、請求項2記載の電気自動車の回生制動制御装置。
【請求項4】
該後輪側における該電気自動車の車高を第1車高として検出する第1車高検出手段と、
該前輪側における該電気自動車の車高を第2車高として検出する第2車高検出手段と、
該第1車高と該第1車重との関係を規定する第1車重マップと、
該第2車高と該第2車重との関係を規定する第2車重マップとを備え、
該第1車重演算手段は、
該第1車高検出手段によって検出された該第1車高を該第1車重マップに適用することで該第1車重を演算し、
該第2車重演算手段は、
該第2車高検出手段によって検出された該第2車高を該第2車重マップに適用することで該第2車重を演算する
ことを特徴とする請求項3記載の電気自動車の回生制動制御装置。
【請求項5】
該第2摩擦制動装置による機械的制動トルクを第2機械的制動トルクとして推定する第2機械的制動トルク推定手段と、
該車両のブレーキペダルの踏力を検出するブレーキペダル踏力検出手段と、
該ブレーキペダル踏力と該第1機械的制動トルクとの関係を規定する第1機械的制動トルクマップと、
該ブレーキペダル踏力と該第2機械的制動トルクとの関係を規定する第2機械的制動トルクマップとを備え、
該第2機械的制動トルク推定手段は、
該ブレーキペダル踏力検出手段によって検出された該ブレーキペダル踏力を該第2機械的制動トルクマップに適用することで該第2機械的制動トルクを演算し、
該第1機械的制動トルク推定手段は、
該ブレーキペダル踏力検出手段によって検出された該ブレーキペダル踏力を該第1機械的制動トルクマップに適用することで該第1機械的制動トルクを演算する
ことを特徴とする、請求項1〜4の何れか1項に記載の電気自動車の回生制動制御装置。
【請求項6】
該第1機械的制動トルクマップ及び該第2機械的制動トルクマップには、
該第1機械的制動トルクと該第1理想制動トルクが同値となり且つ該第2機械的制動トルクと該第2理想制動トルクが同値となる場合の減速度が、該電動発電機の回生制動トルクが最大となる場合の減速度を超えない範囲で、該第1機械的制動トルクと該第2機械的制動トルクとの関係が規定されている
ことを特徴とする、請求項5記載の電気自動車の回生制動制御装置。
【請求項7】
該回生制動制御手段は、
該第1理想制動トルク及び該第2理想制動トルクで制動を行った場合、該車両で生じる減速度である理想減速度を推定する理想減速度推定手段と、
該理想減速度推定手段によって検出された該理想減速度と実減速度検出手段によって検出された該実減速度との差の絶対値が、設定された所定範囲の値から外れた場合に、該目標回生制動トルクを補正する補正制御を実施する目標回生制動トルク補正手段とを備えている
ことを特徴とする、請求項1〜6の何れか1項に記載の電気自動車の回生制動制御装置。
【請求項8】
該回生制動制御手段は、
該電気自動車の車速を検出する車速検出手段を備え、
該車速検出手段により検出された該車速が、設定された車速閾値でない場合に回生制動制御を実施する
ことを特徴とする、請求項1〜7の何れか1項に記載の電気自動車の回生制動制御装置。
【図1】


【図2】
【図3】
【図4】
【図5】

【図6】
【図7】

【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2010−200590(P2010−200590A)
【公開日】平成22年9月9日(2010.9.9)
【国際特許分類】
【出願番号】特願2009−45942(P2009−45942)
【出願日】平成21年2月27日(2009.2.27)
【出願人】(000006286)三菱自動車工業株式会社 (2,892)
【Fターム(参考)】
【公開日】平成22年9月9日(2010.9.9)
【国際特許分類】
【出願日】平成21年2月27日(2009.2.27)
【出願人】(000006286)三菱自動車工業株式会社 (2,892)
【Fターム(参考)】
[ Back to top ]