
電気自動車の管理システム
【課題】救護対象の複数の電気自動車の状況に応じて、救護車両の配置を適切に管理可能な電気自動車の管理システムを提供する。
【解決手段】電気自動車の管理システム(100)は、バッテリを搭載した電気自動車(110)と、充電手段を有する救護車両(150)と、電気自動車及び救護車両の位置を検出する手段(113,152,142)と、バッテリのSOCを検出する手段(112,142)と、電気自動車と救護車両との相対的な位置関係を管理する管理手段(144)と、SOCが少ないと判定されたとき、管理手段から救護車両に対して前記相対距離を近づけるように指示する指示手段(146)とを備えることを特徴とする。
【解決手段】電気自動車の管理システム(100)は、バッテリを搭載した電気自動車(110)と、充電手段を有する救護車両(150)と、電気自動車及び救護車両の位置を検出する手段(113,152,142)と、バッテリのSOCを検出する手段(112,142)と、電気自動車と救護車両との相対的な位置関係を管理する管理手段(144)と、SOCが少ないと判定されたとき、管理手段から救護車両に対して前記相対距離を近づけるように指示する指示手段(146)とを備えることを特徴とする。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、バッテリに蓄えられた電力で電動機を駆動して走行する電気自動車がバッテリ切れの状態になった場合に迅速な救護を行うための電気自動車の管理システムの技術分野に関する。
【背景技術】
【0002】
近年、従来のガソリンなどの化石燃料を燃焼して動力を得る内燃機関に代えて、バッテリに蓄えられた電力で駆動可能な電動機(モータ)により走行用動力を発生して走行する電気自動車が注目されている。電動機を駆動するための電力は、予めバッテリに充電スタンド(或いは家庭用電源でもよい)などの充電設備において充電されることにより、バッテリに蓄積されている。
【0003】
この種の電気自動車の普及に伴い、今後、車両が走行途中にバッテリ切れで走行不能に陥るケースが生じることが予想される。そのため、電気自動車の更なる普及を目指す上では、電気自動車が走行途中にバッテリ切れにより走行不能な状態に陥った場合であっても、迅速な救護が行われるためのシステムの構築が望まれている。
【0004】
従来の内燃機関ガソリンエンジン車を対象とする救護システムにおいては、燃料切れになった場合に、救護車両に最寄りの給油所から復旧用燃料(ガソリン等)を積載し、走行不能な車両に供給することにより救護する救護車両を導入することが行われており、救護車両のような作業車両を管理するための技術として、例えば特許文献1のような技術が公知である。特許文献1では、監視エリア内に存在する複数の作業車両について、GPS通信衛星などを用いて位置情報を取得することで、各作業車両の位置を監視することにより、各作業者量を管理する技術が開示されている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2009−241662号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
ここで、従来のガソリンエンジン車を救護対象とする救護車両では、復旧用のガソリンを運搬補給する救護車両では最寄りの給油所から復旧用燃料(ガソリン)を小さな容器で運んで補給すれば足りていた。しかしながら、救護対象を電気自動車とする場合、電気自動車の動力源はバッテリに充電された電力であるため、救護車両にはバッテリを充電するための一定の仕様を満たした充電手段を搭載する必要がある。このような充電手段はサイズや重さが大きい上に、高価である。そのため、救護車両は、ガソリンエンジン車を救護対象とする場合に比べて、多くの台数を配備することは技術的・コスト的にも困難である。このように、電気自動車用を救護対象とする場合、台数の限られた救護車両で多くの電気自動車を効率的に救護可能なように、その配置を適切に管理しなければならないという問題点がある。
【0007】
本発明は上記問題点に鑑みなされたものであり、救護対象の電気自動車の状況に応じて、救護車両の配置を適切に管理可能な電気自動車の管理システムを提供することを目的とする。
【課題を解決するための手段】
【0008】
本発明に係る電気自動車の管理システムは上記課題を解決するために、バッテリを搭載した電気自動車と、前記バッテリに充電可能な充電手段を有する救護車両と、前記電気自動車及び前記救護車両のそれぞれの位置を検出する位置検出手段と、前記バッテリの充電度合いを検出する充電度合い検出手段と、前記位置検出手段の検出結果に基づき、前記電気自動車と前記救護車両との相対的な位置関係を管理する管理手段と、前記充電度合い検出手段により基づき、前記充電度合いが予め設定された所定値より少ないと判定されたとき、前記管理手段から前記救護車両に対して前記電気自動車との相対距離を近づけるように指示する指示手段とを備えることを特徴とする。
【0009】
本発明によれば、充電度合いが少ない電気自動車に対して救護車両を近づけるように、電気自動車と救護車両との相対的な位置関係を管理することで、バッテリ切れの状態に陥りそうな電気自動車を特定し、バッテリ切れの状態に陥った場合に備えて救護車両を近づくに配備することができる。これにより、電気自動車側で実際にバッテリ切れが生じるなど、救護車両による救援が必要な状況になった場合に、電気自動車のもとに救護車両を迅速に出動させ、効率的な復旧作業を行うことができる。
【0010】
好ましくは、前記管理手段は、前記相対的な位置関係を、前記電気自動車がバッテリ切れを生じる前に前記救護車両が到達可能となるように管理するとよい。これによれば、管理手段によって電気自動車が搭載するバッテリの充電度合いを取得することによって、バッテリの充電度合いからバッテリ切れが生じるタイミングを想定し、救護車両の配置を管理することができる。その結果、電気自動車が実際にバッテリ切れとなる前に、救護車両の充電手段から充電させることが可能となるので、電気自動車が自力走行不能状態に陥る状態を回避することができる。
【0011】
また、前記位置検出手段は、複数の電気自動車の各々の位置を検出し、前記管理手段は、前記複数の電気自動車の各々と前記救護車両との相対位置を管理するとよい。これによれば、複数の電気自動車について、バッテリ切れが生じる状態をきたさないように救護車両の位置を管理することができる。
【0012】
また、前記充電度合い検出手段の検出結果に基づき、前記複数の電気自動車について所定期間内に前記バッテリ切れが生じ得るか否かを判定する判定手段を更に備えてもよい。これによれば、判定手段は取得したバッテリの充電度合いに基づいて、複数の電気自動車のなかからバッテリ切れが生じ得る電気自動車を的確に判定することができる。
【0013】
この場合、前記判定手段は、前記充電度合い検出手段で検出される充電度合いが所定値以上の電気自動車を判定対象から除外するとよい。これによれば、充電度合いが所定値以上に十分にある電気自動車は、所定期間内にバッテリ切れが生じる可能性が低い。そのため、このような電気自動車を判定対象から除外することで、判定手段の判定に係る負荷を効率的に低減することができる。
【0014】
そして特に、前記管理手段で管理可能な所定エリア内に、前記救護車両とは別に、前記バッテリに充電可能な充電手段を有する充電設備が設置されており、前記判定手段は、前記充電設備の周囲の所定範囲内に存在する電気自動車を判定対象から除外するとよい。これによれば、充電設備の周囲ある電気自動車は、救護車両が近くに配置されていなくても、充電設備に設けられた充電手段から充電することが可能であるため、このような電気自動車を判定対象から除外することで、判定手段の判定に係る負荷を、より効率的に低減することができる。
【0015】
また、前記充電度合い検出手段は、前記バッテリの充電度合いの減少度合いを推定する推定手段を備え、前記判定手段は、前記推定手段の推定結果に基づき、前記所定期間内に前記バッテリ切れが生じ得るか否かを判定してもよい。推定手段は、例えばバッテリの充電度合いの時系列変化に基づいて減少度合いを推定可能であり、判定手段は当該推定結果に基づいて、将来的に所定期間内にバッテリ切れが生じ得るかどうかを判定することができる。このようにバッテリの充電度合いの減少度合いを考慮し、減少度合いが大きいものについては所定期間内にバッテリ切れが生じ得る可能性が高いと判断することで、電気自動車が走行不能状態に陥ることをより一層回避し易くなる。
【0016】
例えば、前記管理手段は、前記相対距離を推定する相対距離推定手段を更に備え、前記充電度合い検出手段で検出される充電度合いと前記距離推定手段で推定される距離との積を、前記全ての電気自動車について足した値が最小となるように前記相対的な位置関係を管理するとよい。これによれば、簡素な計算で充電度合いが少ない電気自動車に対して救護車両が近づくように救護車両を管理することができるので、管理手段に係る負荷を効率的に低減することができる。
【発明の効果】
【0017】
本発明によれば、充電度合いが少ない電気自動車に対して救護車両を近づけるように、電気自動車と救護車両との相対的な位置関係を管理することで、バッテリ切れの状態に陥りそうな電気自動車を特定し、バッテリ切れの状態に陥った場合に備えて救護車両を近づくに配備することができる。これにより、電気自動車側で実際にバッテリ切れが生じるなど、救護車両による救援が必要な状況になった場合に、電気自動車のもとに救護車両を迅速に出動させ、効率的な復旧作業を行うことができる。
【図面の簡単な説明】
【0018】
【図1】本発明に係る電気自動車の管理システムの全体構成を示すブロック構成図である。
【図2】本発明に係る電気自動車の管理システムの管理エリア内に存在する電気自動車と救護車両との位置関係の一例を示す模式図である。
【図3】本発明に係る電気自動車の管理システムの基本的な制御内容を示すフローチャート図である。
【図4】図3に管理エリア内に存在する充電スタンドの位置を追加して示す模式図である。
【発明を実施するための形態】
【0019】
以下、図面を参照して本発明の好適な実施形態を例示的に詳しく説明する。但しこの実施形態に記載されている構成部品の寸法、材質、形状、その相対的配置等は特に特定的な記載がない限りは、この発明の範囲をそれに限定する趣旨ではなく、単なる説明例に過ぎない。
【0020】
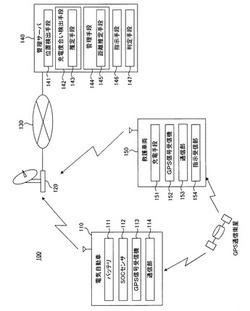
図1は本発明に係る電気自動車の管理システム(以下、適宜「本システム」と称する)100の全体構成を示すブロック構成図である。本システム100の管理対象は、バッテリ111に充電された電力を動力として駆動可能な電動機(図不示)を走行用動力源として搭載する電気自動車110である。電気自動車110には、上述のバッテリ111と電動機の他に、バッテリ111の充電度合い(以下、適宜「SOC:State of charge」と称する)を検出するための充電度合い検出手段であるSOCセンサ112と、電気自動車110の位置を検出するための位置検出手段であるGPS信号受信機113と、前記SOCセンサ112及びGPS信号受信機113で検出したSOC及び位置情報を含む各種情報を、車外に無線送信するための通信部114とを備えてなる。SOCセンサ112としては、例えばバッテリ111の電流を検出する電流センサを用いることができる。
【0021】
電気自動車110の通信部114から無線送信された各種情報(SOCや位置情報など)は、中継基地局に設置された受信アンテナ120で受信され、ネットワーク回線130を介して管理拠点に設置された管理サーバ140に送られる。
【0022】
管理サーバ140は、ネットワーク回線130を介して電気自動車110から送信された各種情報を受信する。管理サーバ140は、受信した各種情報から位置情報を検出する位置情報検出手段141と、受信した各種情報からSOCを検出する充電度合い検出手段142と、電気自動車110と救護車両150との相対的な位置関係の管理を行う管理手段144と、管理手段144による管理内容に基づいて救護車両150に対して指示を行う指示手段146と、受信した各種情報に基づいて電気自動車110においてバッテリ切れが生じ得るか否かを判定する判定手段147とを備えてなる。尚、充電度合い検出手段142は推定手段143が備えられており、管理手段144には距離推定手段145が備えられているが、これらの詳細については後述することとする。
【0023】
管理サーバ140から指令を受けた救護車両150は、SOCが低下した電気自動車110のバッテリ111に充電を行うための充電手段151と、救護車両150の位置を検出するためのGPS信号受信機152と、管理サーバ140に対して救護車両150の位置情報を送信するための通信部153と、管理サーバ140からの指示を受信するための指示受信部154とを備えてなる。
【0024】
このように管理サーバ140では、電気自動車110と救護車両150のそれぞれから送信された位置情報を解析処理することにより、電気自動車110と救護車両150との相対的な位置関係の管理を行うことができる。また、当該解析処理の際には、充電度合い検出手段142や判定手段147における処理結果を考慮することにより、電気自動車110や救護車両150の状態をリアルタイムで管理し、救護車両150の最適配置を実現することができる。
【0025】
尚、管理サーバ140の位置情報やSOCの取得間隔は、電気自動車110や救護車両150の状態変化をリアルタイムで精度よく管理するために短いほど好ましいが、実際には管理サーバ140の処理負担を考慮して適宜設定するとよい。
【0026】
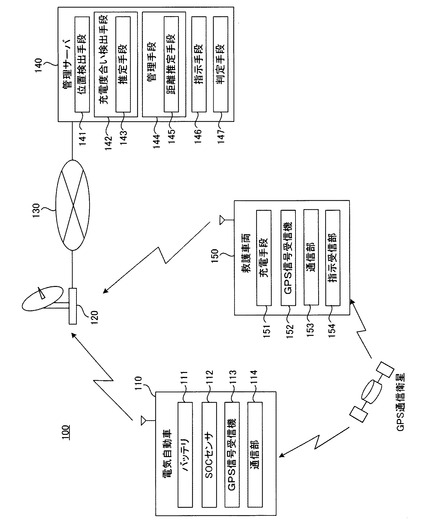
図2は本システム1の管理エリアA内に存在する電気自動車110と救護車両150との位置関係の一例を示す模式図である。図2では、最外側の実線が本システム1の管理エリアAの境界線を示しており、管理エリアA内に存在する電気自動車110を白抜きの三角形のシンボル(△)、救護車両150を白抜きの四角形のシンボル(□)で示している。管理エリアA内には合計i台の電気自動車110が存在しており、本実施例では特に、i=7である(尚、図2では7台の電気自動車110をそれぞれEVA1〜EVA7で示している)。
【0027】
また、本実施例では説明の複雑化を避けるために、管理エリアA内に存在する救護車両150は一台としているが(図2では、1台の救護車両150をRESAで示している)、実際には、管理エリアA内に複数台の救護車両150を配備してもよいし、条件に応じて、例えば一日のうち朝、昼、夜、深夜等に区分した時間帯に応じて配備台数を変えるなど、配備する救護車両150の台数を可変に設定してもよい。
【0028】
図2に示す電気自動車110及び救護車両150の各々の位置及びSOCは、管理サーバ140が受信した情報に基づいて特定される。図2の例では、救護車両RESAに対する各電気自動車EVA1、EVA2、・・・の相対的距離がd1、d2、・・・、各電気自動車EVA1、EVA2、・・・のSOCの値がSOCA1、SOCA2、・・・と特定されている。
【0029】
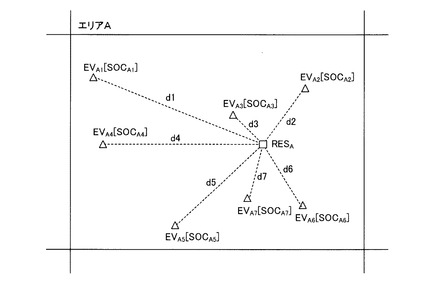
続いて、電気自動車110及び救護車両150が図2に示す状態にある場合を例に、本システム1の具体的な制御内容について説明する。図3は本システム1の基本的な制御内容を示すフローチャート図である。
【0030】
まず管理サーバ140は管理エリアA内に存在する電気自動車110及び救護車両150と通信することにより、管理エリアA内に存在する各車両(電気自動車110及び救護車両150)を特定する(ステップS101)。これにより、制御部140は以下の制御を行うことによって管理すべき電気自動車110及び救護車両150を特定する。
【0031】
続いて管理サーバ140の位置検出手段141は、ステップS101で特定した電気自動車110及び救護車両150の各々について、位置情報を取得する(ステップS102)。そして、管理手段144は、当該取得した位置情報に基づいて、各電気自動車110と救護車両150の位置(図2のEVA1、EVA2、・・・、及び、RESAで示す位置)を特定し、各電気自動車110について救護車両150に対する相対的な位置関係を算出する。この各電気自動車110について救護車両150に対する相対的な位置関係の算出は、管理手段144が備える距離推定手段145において行われ、救護車両150から各電気自動車110までの相対的距離(図2においてd1、d2、・・・で示す距離)が算出される。
【0032】
続いて管理サーバ140の充電度合い検出手段142はステップS101で特定した電気自動車110の各々からSOC情報を取得する(ステップS103)。これにより、管理サーバ140は図2においてEVA1、EVA2、・・・で示す各電気自動車110の充電度合いSOCA1、SOCA2、・・・を特定する。
【0033】
続いて管理手段144は、ステップS102において算出した救護車両150から各電気自動車110までの相対的距離d1、d2、・・・と、ステップS103において算出した各電気自動車110の充電度合いSOCA1、SOCA2、・・・に基づいて、救護車両150の最適配置を算出する(ステップS104)。そして指示手段145は、救護車両150に対して、ステップS104で算出された最適位置に移動するよう指示を行う(ステップS105)。救護車両150は指示受信部154にて、管理サーバ140の指示手段146から送信された指示を受信し、救護車両150のドライバーは当該指示内容に従って管理エリアA内を移動することによって、効率的な配置につくことができる。
【0034】
尚、指示手段146から発せられる指示は、音声や文字を含む各種媒体を用いた方式を広く採用でき、有線又は無線の各種通信網を利用してよい。また管理サーバ140のオペレータが算出された最適配置を確認して、電話やメールなどで救護車両150のドライバーに直接指示するようにしてもよい。
【0035】
ここで指示手段146が行う指示は、充電度合い検出手段142で検出されたSOCが所定値SOC1より少ないと判定されたとき、管理手段144から救護車両150に対して電気自動車110との相対距離を近づけるように行われる。これにより、検出したSOCからバッテリ切れの状態に陥りそうな電気自動車110を特定し、バッテリ切れの状態に陥った場合に備えて、当該電気自動車110に対して救護車両150が近づくように配備することができる。これにより、電気自動車110側で実際にバッテリ切れが生じるなど、救護車両150による救援が必要な状況になった場合に、電気自動車110のもとに救護車両を迅速に出動させ、効率的な復旧作業を行うことができる。
【0036】
尚、所定値SOC1はバッテリ切れの状態に陥りそうな電気自動車110であるか否かを判定するための閾値であり、どの程度までSOCが減少した場合にバッテリ切れの状態に陥りそうな状態であると判定するかによって、実験的、理論的或いはシミュレーション的に適宜設定するとよい。この場合は、電気自動車110の仕様などに基づき予め一定値をSOC1として設定することもできるし、電気自動車110の使用履歴や外部環境(例えば気温)などを考慮してSOC1の値を可変させることもできる。
【0037】
以上説明した管理サーバ140の制御は、定期又は不定期なタイミングで適宜繰り返し実行される。これにより、管理エリアA内に存在する電気自動車110に対して、救護車両150の配置位置をリアルタイムに最適位置に管理することが可能となる。
【0038】
ここで、ステップS104における救護車両150の最適配置を算出方法の一例について、詳しく説明する。最適配置の算出方法としては、効率的に管理エリアA内の電気自動車110を救護可能となるように、例えば計算幾何学に基づき配置を決定したり、数理計画法や線形計画法などの公知の各種方法を用いたりすることができる。
【0039】
この例ではまず、管理手段144は、各電気自動車110に対して救護車両150との相対的距離diと充電度合いSOCAiとの積(di×SOCAi)を算出し、管理エリアA内に存在する全ての電気自動車110に対して足し合わせてなる指標Eを求める。
E=Σ(di×SOCAi) (1)
管理手段144は指標Eが最小となるように、管理エリアAにおける救護車両150の最適配置を算出する。これにより、充電残量が少なく充電の必要性が高い電気自動車110、或いは、救護車両150からの距離が遠いためにバッテリ切れの際に救護車両150が到着するまでに手間取る可能性が高い電気自動車110を効率的に救護可能なように、最適配置を決定することができる。
【0040】
特に管理手段144は、電気自動車110と救護車両150との相対的な位置関係を、電気自動車110がバッテリ切れを生じる前に救護車両150が到達可能となるように最適配置を決定するとよい。具体的には、充電度合い検出手段142によって検出した各電気自動車110のSOCの値に応じて、各電気自動車110にバッテリ切れが生じるタイミングを想定し、救護車両150の配置を管理するとよい。この場合、電気自動車110が実際にバッテリ切れとなる前に、救護車両150を派遣し、救護を行わせることができるので、電気自動車110が自力走行不能状態に陥る状態を効果的に回避することができる。
【0041】
このようなバッテリ切れが生じるタイミングの判定は、判定手段147において、充電度合い検出手段142で検出したSOCに基づいて行われる。判定手段147では、各電気自動車110について所定期間内にバッテリ切れが生じ得るか否かを判定する。具体的には、予めSOCの値に対するバッテリ切れが生じるまでの時間をマップとして記憶しておき、充電度合い検出手段142で検出したSOCから当該マップを参照して求めたバッテリ切れが生じるまでの時間が、所定期間より短いか否かにより判定が行われるとよい。尚、マップにて規定されるSOCとバッテリ切れが生じるまでの時間との関係は、救護対象である電気自動車110が搭載するバッテリ111や電気自動車110自体の種類や仕様毎に規定されていてもよい。この場合、受信アンテナ120やネットワーク130を介して各電気自動車110からその車種や搭載されているバッテリ111の型番等を識別するための識別情報を取得し、当該取得した識別情報に対応するマップからSOCとバッテリ切れが生じるまでの時間との関係を読み出すようにするとよい。
【0042】
また救護車両150の最適配置の他の算出方法としては、各電気自動車110におけるSOCの減少度合いを考慮に入れてもよい。上記(1)式を用いた算出方法では、各電気自動車110に対する救護車両150との相対的距離diと充電度合いSOCAiという2種類のパラメータを用いた。この方法では、これらの2つのパラメータに加え、充電度合い検出手段142が備える推定手段143において、各電気自動車110に搭載されたバッテリ111の充電度合い(SOC)の減少度合いとしてSOCの微分値(d(SOC)/dt)を算出し、その値をパラメータとして追加する。つまり、(1)式に、このSOCの減少度合い(d(SOC)/dt)をパラメータとして追加した指標
E’=f(Σ(di×SOCAi),d(SOC)/dt) (2)
が最小となるように、管理エリアAにおける救護車両150の最適配置を算出することができる。ここで、(2)式におけるfはΣ(di×SOCAi)と(d(SOC)/dt)とを変数とする任意の2変数関数である。
【0043】
そして判定手段147は、推定手段143の推定結果に基づき、所定期間内にバッテリ切れが生じ得るか否かを判定する。これにより、SOCの減少度合い(d(SOC)/dt)が速い電気自動車110に対して救護車両150が近く配置されるように、最適配置が決定される。これにより、バッテリ消費速度が速く電池切れになる可能性が高い電気自動車110を効率的に救護可能なように、最適配置を決定することができる。
【0044】
(変形例)
本システム100の変形例として、管理エリアAにおける電気自動車110に充電可能な充電手段が設けられた充電設備である充電スタンドの位置を規定した充電設備情報を予め記憶するデータベースを備えることができる。この場合、管理手段144はデータベースにアクセスして充電設備情報を取得することにより、管理エリアA内に存在する各電気自動車110と充電スタンドとの位置関係を特定することができる。
【0045】
尚、前記充電設備情報は、管理エリアA内における充電スタンドの位置に加えて、管理エリアA内の地図情報、例えば道路の幅や勾配、信号機の設置位置など、救護車両150が救護対象である電気自動車110に到達するまでの時間を評価する際に役立つ各種情報を含んでいるとよい。
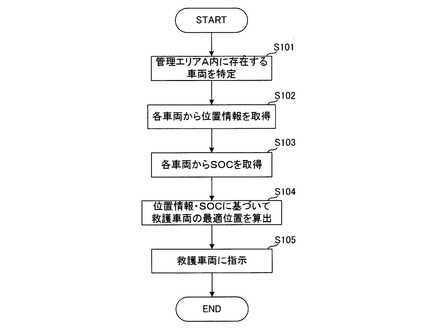
【0046】
ここで、図4は図3に管理エリアA内に存在する充電スタンドSTD(図4において、白抜きの○シンボルで表記)の位置を追加して示す模式図である。管理サーバ140は充電設備情報に基づいて算出した各電気自動車110と充電スタンドSTDとの距離Dと、予め規定された閾値D1との大小を比較することにより、充電スタンドSTDから所定距離内に位置する電気自動車110を判定手段147の判定対象から除外するとよい(図4では除外対象エリアを円状の点線aで囲んで示してある)。充電スタンドSTDから所定距離内に位置する電気自動車110は、救護車両150が救護に向かうまでもなく、充電スタンドSTDで充電することによりバッテリ切れの状態に陥ることを容易に回避可能である。そのため、このような電気自動車110は本システム1で救護車両150の救護対象として管理する必要がなく、判定対象から除外しても問題はない。その結果、上記判定手段147において取り扱う電気自動車110の台数を削減できるので、管理サーバ110の処理負担を効率的に軽減することができる。
【0047】
また、判定手段147はステップS103において取得したSOCが所定値以上の電気自動車110を、上記ステップS104における算出対象から除外してもよい。SOCが所定値以上の電気自動車110は、充電度合いが十分に高く、バッテリ切れの状態に陥る可能性が低いため、救護車両150を必要としていないのは明らかである。そのため、このような電気自動車110は本システム1で救護車両150の救護対象として管理する必要がなく、処理から除外しても問題はない。その結果、判定手段147において取り扱う電気自動車110の台数を削減できるので、管理サーバ110の処理負担を効率的に軽減することができる。
【0048】
尚、上記実施例では管理サーバ140を管理拠点に設置した場合について説明したが、この管理サーバ140を例えば車載コンピュータなどとして救護車両150に搭載するように構成してもよい。また、救護車両150は各管理エリアAに一台ずつ配置するとしたが、同一エリア内に複数台配置してもよい。また、特定の管理エリアにおける電気自動車110の台数が増加した場合には、その台数に応じて他の管理エリア(例えば隣接するエリア)を担当する救護車両150が救援するようにしてもよい。また、各管理エリアの大きさは固定であるとして説明したが、エリア内に存在する救護車両や電気自動車の台数、天候、道路状況(例えば渋滞度合いなど)の各種条件に応じて可変に設定してもよい。
【0049】
尚、本発明における救護車両は、救護を行うために設計された専用の救護車両だけではなく、車両間でバッテリの電力の受け渡しが可能な充電設備が搭載された一般の電気自動車であってもよい。即ち、電気自動車110が充電手段を備える場合には、本発明の救護車両150として機能させてもよく、一般の電気自動車同士で救援し合えるように構成してもよい。
【0050】
以上説明したように、本発明によれば、救護車両150の配置を、充電度合いが少ない電気自動車110に対して救護車両150を近づけるように管理することで、バッテリ切れの状態に陥りそうな電気自動車110の停車位置に救護車両150を配備することができる。これにより、バッテリ切れに陥るおそれのある電気自動車110、又は、実際にバッテリ切れの状態に陥ってしまった電気自動車110に対して救護車両150を迅速に出動させることができ、救護車両150による充電度合いの回復に要する時間を効率的に短縮することができる。
【産業上の利用可能性】
【0051】
本発明は、バッテリに蓄えられた電力で駆動する電動機を動力源として走行する電気自動車がバッテリ充電残量不足状態に陥った際に、搭載した充電手段で前記バッテリを充電することにより復旧させる救護車両を管理する電気自動車の管理システムに利用可能である。
【符号の説明】
【0052】
100 管理システム
110 電気自動車
111 バッテリ
112 SOCセンサ
113 GPS信号受信機
114 通信部
120 受信アンテナ
130 ネットワーク回線
140 管理サーバ
141 位置検出手段
142 充電度合い検出手段
143 推定手段
144 管理手段
145 距離推定手段
146 指示手段
147 判定手段
150 救護車両
151 充電手段
152 GPS信号受信機
153 通信部
154 指示受信部
【技術分野】
【0001】
本発明は、バッテリに蓄えられた電力で電動機を駆動して走行する電気自動車がバッテリ切れの状態になった場合に迅速な救護を行うための電気自動車の管理システムの技術分野に関する。
【背景技術】
【0002】
近年、従来のガソリンなどの化石燃料を燃焼して動力を得る内燃機関に代えて、バッテリに蓄えられた電力で駆動可能な電動機(モータ)により走行用動力を発生して走行する電気自動車が注目されている。電動機を駆動するための電力は、予めバッテリに充電スタンド(或いは家庭用電源でもよい)などの充電設備において充電されることにより、バッテリに蓄積されている。
【0003】
この種の電気自動車の普及に伴い、今後、車両が走行途中にバッテリ切れで走行不能に陥るケースが生じることが予想される。そのため、電気自動車の更なる普及を目指す上では、電気自動車が走行途中にバッテリ切れにより走行不能な状態に陥った場合であっても、迅速な救護が行われるためのシステムの構築が望まれている。
【0004】
従来の内燃機関ガソリンエンジン車を対象とする救護システムにおいては、燃料切れになった場合に、救護車両に最寄りの給油所から復旧用燃料(ガソリン等)を積載し、走行不能な車両に供給することにより救護する救護車両を導入することが行われており、救護車両のような作業車両を管理するための技術として、例えば特許文献1のような技術が公知である。特許文献1では、監視エリア内に存在する複数の作業車両について、GPS通信衛星などを用いて位置情報を取得することで、各作業車両の位置を監視することにより、各作業者量を管理する技術が開示されている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2009−241662号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
ここで、従来のガソリンエンジン車を救護対象とする救護車両では、復旧用のガソリンを運搬補給する救護車両では最寄りの給油所から復旧用燃料(ガソリン)を小さな容器で運んで補給すれば足りていた。しかしながら、救護対象を電気自動車とする場合、電気自動車の動力源はバッテリに充電された電力であるため、救護車両にはバッテリを充電するための一定の仕様を満たした充電手段を搭載する必要がある。このような充電手段はサイズや重さが大きい上に、高価である。そのため、救護車両は、ガソリンエンジン車を救護対象とする場合に比べて、多くの台数を配備することは技術的・コスト的にも困難である。このように、電気自動車用を救護対象とする場合、台数の限られた救護車両で多くの電気自動車を効率的に救護可能なように、その配置を適切に管理しなければならないという問題点がある。
【0007】
本発明は上記問題点に鑑みなされたものであり、救護対象の電気自動車の状況に応じて、救護車両の配置を適切に管理可能な電気自動車の管理システムを提供することを目的とする。
【課題を解決するための手段】
【0008】
本発明に係る電気自動車の管理システムは上記課題を解決するために、バッテリを搭載した電気自動車と、前記バッテリに充電可能な充電手段を有する救護車両と、前記電気自動車及び前記救護車両のそれぞれの位置を検出する位置検出手段と、前記バッテリの充電度合いを検出する充電度合い検出手段と、前記位置検出手段の検出結果に基づき、前記電気自動車と前記救護車両との相対的な位置関係を管理する管理手段と、前記充電度合い検出手段により基づき、前記充電度合いが予め設定された所定値より少ないと判定されたとき、前記管理手段から前記救護車両に対して前記電気自動車との相対距離を近づけるように指示する指示手段とを備えることを特徴とする。
【0009】
本発明によれば、充電度合いが少ない電気自動車に対して救護車両を近づけるように、電気自動車と救護車両との相対的な位置関係を管理することで、バッテリ切れの状態に陥りそうな電気自動車を特定し、バッテリ切れの状態に陥った場合に備えて救護車両を近づくに配備することができる。これにより、電気自動車側で実際にバッテリ切れが生じるなど、救護車両による救援が必要な状況になった場合に、電気自動車のもとに救護車両を迅速に出動させ、効率的な復旧作業を行うことができる。
【0010】
好ましくは、前記管理手段は、前記相対的な位置関係を、前記電気自動車がバッテリ切れを生じる前に前記救護車両が到達可能となるように管理するとよい。これによれば、管理手段によって電気自動車が搭載するバッテリの充電度合いを取得することによって、バッテリの充電度合いからバッテリ切れが生じるタイミングを想定し、救護車両の配置を管理することができる。その結果、電気自動車が実際にバッテリ切れとなる前に、救護車両の充電手段から充電させることが可能となるので、電気自動車が自力走行不能状態に陥る状態を回避することができる。
【0011】
また、前記位置検出手段は、複数の電気自動車の各々の位置を検出し、前記管理手段は、前記複数の電気自動車の各々と前記救護車両との相対位置を管理するとよい。これによれば、複数の電気自動車について、バッテリ切れが生じる状態をきたさないように救護車両の位置を管理することができる。
【0012】
また、前記充電度合い検出手段の検出結果に基づき、前記複数の電気自動車について所定期間内に前記バッテリ切れが生じ得るか否かを判定する判定手段を更に備えてもよい。これによれば、判定手段は取得したバッテリの充電度合いに基づいて、複数の電気自動車のなかからバッテリ切れが生じ得る電気自動車を的確に判定することができる。
【0013】
この場合、前記判定手段は、前記充電度合い検出手段で検出される充電度合いが所定値以上の電気自動車を判定対象から除外するとよい。これによれば、充電度合いが所定値以上に十分にある電気自動車は、所定期間内にバッテリ切れが生じる可能性が低い。そのため、このような電気自動車を判定対象から除外することで、判定手段の判定に係る負荷を効率的に低減することができる。
【0014】
そして特に、前記管理手段で管理可能な所定エリア内に、前記救護車両とは別に、前記バッテリに充電可能な充電手段を有する充電設備が設置されており、前記判定手段は、前記充電設備の周囲の所定範囲内に存在する電気自動車を判定対象から除外するとよい。これによれば、充電設備の周囲ある電気自動車は、救護車両が近くに配置されていなくても、充電設備に設けられた充電手段から充電することが可能であるため、このような電気自動車を判定対象から除外することで、判定手段の判定に係る負荷を、より効率的に低減することができる。
【0015】
また、前記充電度合い検出手段は、前記バッテリの充電度合いの減少度合いを推定する推定手段を備え、前記判定手段は、前記推定手段の推定結果に基づき、前記所定期間内に前記バッテリ切れが生じ得るか否かを判定してもよい。推定手段は、例えばバッテリの充電度合いの時系列変化に基づいて減少度合いを推定可能であり、判定手段は当該推定結果に基づいて、将来的に所定期間内にバッテリ切れが生じ得るかどうかを判定することができる。このようにバッテリの充電度合いの減少度合いを考慮し、減少度合いが大きいものについては所定期間内にバッテリ切れが生じ得る可能性が高いと判断することで、電気自動車が走行不能状態に陥ることをより一層回避し易くなる。
【0016】
例えば、前記管理手段は、前記相対距離を推定する相対距離推定手段を更に備え、前記充電度合い検出手段で検出される充電度合いと前記距離推定手段で推定される距離との積を、前記全ての電気自動車について足した値が最小となるように前記相対的な位置関係を管理するとよい。これによれば、簡素な計算で充電度合いが少ない電気自動車に対して救護車両が近づくように救護車両を管理することができるので、管理手段に係る負荷を効率的に低減することができる。
【発明の効果】
【0017】
本発明によれば、充電度合いが少ない電気自動車に対して救護車両を近づけるように、電気自動車と救護車両との相対的な位置関係を管理することで、バッテリ切れの状態に陥りそうな電気自動車を特定し、バッテリ切れの状態に陥った場合に備えて救護車両を近づくに配備することができる。これにより、電気自動車側で実際にバッテリ切れが生じるなど、救護車両による救援が必要な状況になった場合に、電気自動車のもとに救護車両を迅速に出動させ、効率的な復旧作業を行うことができる。
【図面の簡単な説明】
【0018】
【図1】本発明に係る電気自動車の管理システムの全体構成を示すブロック構成図である。
【図2】本発明に係る電気自動車の管理システムの管理エリア内に存在する電気自動車と救護車両との位置関係の一例を示す模式図である。
【図3】本発明に係る電気自動車の管理システムの基本的な制御内容を示すフローチャート図である。
【図4】図3に管理エリア内に存在する充電スタンドの位置を追加して示す模式図である。
【発明を実施するための形態】
【0019】
以下、図面を参照して本発明の好適な実施形態を例示的に詳しく説明する。但しこの実施形態に記載されている構成部品の寸法、材質、形状、その相対的配置等は特に特定的な記載がない限りは、この発明の範囲をそれに限定する趣旨ではなく、単なる説明例に過ぎない。
【0020】
図1は本発明に係る電気自動車の管理システム(以下、適宜「本システム」と称する)100の全体構成を示すブロック構成図である。本システム100の管理対象は、バッテリ111に充電された電力を動力として駆動可能な電動機(図不示)を走行用動力源として搭載する電気自動車110である。電気自動車110には、上述のバッテリ111と電動機の他に、バッテリ111の充電度合い(以下、適宜「SOC:State of charge」と称する)を検出するための充電度合い検出手段であるSOCセンサ112と、電気自動車110の位置を検出するための位置検出手段であるGPS信号受信機113と、前記SOCセンサ112及びGPS信号受信機113で検出したSOC及び位置情報を含む各種情報を、車外に無線送信するための通信部114とを備えてなる。SOCセンサ112としては、例えばバッテリ111の電流を検出する電流センサを用いることができる。
【0021】
電気自動車110の通信部114から無線送信された各種情報(SOCや位置情報など)は、中継基地局に設置された受信アンテナ120で受信され、ネットワーク回線130を介して管理拠点に設置された管理サーバ140に送られる。
【0022】
管理サーバ140は、ネットワーク回線130を介して電気自動車110から送信された各種情報を受信する。管理サーバ140は、受信した各種情報から位置情報を検出する位置情報検出手段141と、受信した各種情報からSOCを検出する充電度合い検出手段142と、電気自動車110と救護車両150との相対的な位置関係の管理を行う管理手段144と、管理手段144による管理内容に基づいて救護車両150に対して指示を行う指示手段146と、受信した各種情報に基づいて電気自動車110においてバッテリ切れが生じ得るか否かを判定する判定手段147とを備えてなる。尚、充電度合い検出手段142は推定手段143が備えられており、管理手段144には距離推定手段145が備えられているが、これらの詳細については後述することとする。
【0023】
管理サーバ140から指令を受けた救護車両150は、SOCが低下した電気自動車110のバッテリ111に充電を行うための充電手段151と、救護車両150の位置を検出するためのGPS信号受信機152と、管理サーバ140に対して救護車両150の位置情報を送信するための通信部153と、管理サーバ140からの指示を受信するための指示受信部154とを備えてなる。
【0024】
このように管理サーバ140では、電気自動車110と救護車両150のそれぞれから送信された位置情報を解析処理することにより、電気自動車110と救護車両150との相対的な位置関係の管理を行うことができる。また、当該解析処理の際には、充電度合い検出手段142や判定手段147における処理結果を考慮することにより、電気自動車110や救護車両150の状態をリアルタイムで管理し、救護車両150の最適配置を実現することができる。
【0025】
尚、管理サーバ140の位置情報やSOCの取得間隔は、電気自動車110や救護車両150の状態変化をリアルタイムで精度よく管理するために短いほど好ましいが、実際には管理サーバ140の処理負担を考慮して適宜設定するとよい。
【0026】
図2は本システム1の管理エリアA内に存在する電気自動車110と救護車両150との位置関係の一例を示す模式図である。図2では、最外側の実線が本システム1の管理エリアAの境界線を示しており、管理エリアA内に存在する電気自動車110を白抜きの三角形のシンボル(△)、救護車両150を白抜きの四角形のシンボル(□)で示している。管理エリアA内には合計i台の電気自動車110が存在しており、本実施例では特に、i=7である(尚、図2では7台の電気自動車110をそれぞれEVA1〜EVA7で示している)。
【0027】
また、本実施例では説明の複雑化を避けるために、管理エリアA内に存在する救護車両150は一台としているが(図2では、1台の救護車両150をRESAで示している)、実際には、管理エリアA内に複数台の救護車両150を配備してもよいし、条件に応じて、例えば一日のうち朝、昼、夜、深夜等に区分した時間帯に応じて配備台数を変えるなど、配備する救護車両150の台数を可変に設定してもよい。
【0028】
図2に示す電気自動車110及び救護車両150の各々の位置及びSOCは、管理サーバ140が受信した情報に基づいて特定される。図2の例では、救護車両RESAに対する各電気自動車EVA1、EVA2、・・・の相対的距離がd1、d2、・・・、各電気自動車EVA1、EVA2、・・・のSOCの値がSOCA1、SOCA2、・・・と特定されている。
【0029】
続いて、電気自動車110及び救護車両150が図2に示す状態にある場合を例に、本システム1の具体的な制御内容について説明する。図3は本システム1の基本的な制御内容を示すフローチャート図である。
【0030】
まず管理サーバ140は管理エリアA内に存在する電気自動車110及び救護車両150と通信することにより、管理エリアA内に存在する各車両(電気自動車110及び救護車両150)を特定する(ステップS101)。これにより、制御部140は以下の制御を行うことによって管理すべき電気自動車110及び救護車両150を特定する。
【0031】
続いて管理サーバ140の位置検出手段141は、ステップS101で特定した電気自動車110及び救護車両150の各々について、位置情報を取得する(ステップS102)。そして、管理手段144は、当該取得した位置情報に基づいて、各電気自動車110と救護車両150の位置(図2のEVA1、EVA2、・・・、及び、RESAで示す位置)を特定し、各電気自動車110について救護車両150に対する相対的な位置関係を算出する。この各電気自動車110について救護車両150に対する相対的な位置関係の算出は、管理手段144が備える距離推定手段145において行われ、救護車両150から各電気自動車110までの相対的距離(図2においてd1、d2、・・・で示す距離)が算出される。
【0032】
続いて管理サーバ140の充電度合い検出手段142はステップS101で特定した電気自動車110の各々からSOC情報を取得する(ステップS103)。これにより、管理サーバ140は図2においてEVA1、EVA2、・・・で示す各電気自動車110の充電度合いSOCA1、SOCA2、・・・を特定する。
【0033】
続いて管理手段144は、ステップS102において算出した救護車両150から各電気自動車110までの相対的距離d1、d2、・・・と、ステップS103において算出した各電気自動車110の充電度合いSOCA1、SOCA2、・・・に基づいて、救護車両150の最適配置を算出する(ステップS104)。そして指示手段145は、救護車両150に対して、ステップS104で算出された最適位置に移動するよう指示を行う(ステップS105)。救護車両150は指示受信部154にて、管理サーバ140の指示手段146から送信された指示を受信し、救護車両150のドライバーは当該指示内容に従って管理エリアA内を移動することによって、効率的な配置につくことができる。
【0034】
尚、指示手段146から発せられる指示は、音声や文字を含む各種媒体を用いた方式を広く採用でき、有線又は無線の各種通信網を利用してよい。また管理サーバ140のオペレータが算出された最適配置を確認して、電話やメールなどで救護車両150のドライバーに直接指示するようにしてもよい。
【0035】
ここで指示手段146が行う指示は、充電度合い検出手段142で検出されたSOCが所定値SOC1より少ないと判定されたとき、管理手段144から救護車両150に対して電気自動車110との相対距離を近づけるように行われる。これにより、検出したSOCからバッテリ切れの状態に陥りそうな電気自動車110を特定し、バッテリ切れの状態に陥った場合に備えて、当該電気自動車110に対して救護車両150が近づくように配備することができる。これにより、電気自動車110側で実際にバッテリ切れが生じるなど、救護車両150による救援が必要な状況になった場合に、電気自動車110のもとに救護車両を迅速に出動させ、効率的な復旧作業を行うことができる。
【0036】
尚、所定値SOC1はバッテリ切れの状態に陥りそうな電気自動車110であるか否かを判定するための閾値であり、どの程度までSOCが減少した場合にバッテリ切れの状態に陥りそうな状態であると判定するかによって、実験的、理論的或いはシミュレーション的に適宜設定するとよい。この場合は、電気自動車110の仕様などに基づき予め一定値をSOC1として設定することもできるし、電気自動車110の使用履歴や外部環境(例えば気温)などを考慮してSOC1の値を可変させることもできる。
【0037】
以上説明した管理サーバ140の制御は、定期又は不定期なタイミングで適宜繰り返し実行される。これにより、管理エリアA内に存在する電気自動車110に対して、救護車両150の配置位置をリアルタイムに最適位置に管理することが可能となる。
【0038】
ここで、ステップS104における救護車両150の最適配置を算出方法の一例について、詳しく説明する。最適配置の算出方法としては、効率的に管理エリアA内の電気自動車110を救護可能となるように、例えば計算幾何学に基づき配置を決定したり、数理計画法や線形計画法などの公知の各種方法を用いたりすることができる。
【0039】
この例ではまず、管理手段144は、各電気自動車110に対して救護車両150との相対的距離diと充電度合いSOCAiとの積(di×SOCAi)を算出し、管理エリアA内に存在する全ての電気自動車110に対して足し合わせてなる指標Eを求める。
E=Σ(di×SOCAi) (1)
管理手段144は指標Eが最小となるように、管理エリアAにおける救護車両150の最適配置を算出する。これにより、充電残量が少なく充電の必要性が高い電気自動車110、或いは、救護車両150からの距離が遠いためにバッテリ切れの際に救護車両150が到着するまでに手間取る可能性が高い電気自動車110を効率的に救護可能なように、最適配置を決定することができる。
【0040】
特に管理手段144は、電気自動車110と救護車両150との相対的な位置関係を、電気自動車110がバッテリ切れを生じる前に救護車両150が到達可能となるように最適配置を決定するとよい。具体的には、充電度合い検出手段142によって検出した各電気自動車110のSOCの値に応じて、各電気自動車110にバッテリ切れが生じるタイミングを想定し、救護車両150の配置を管理するとよい。この場合、電気自動車110が実際にバッテリ切れとなる前に、救護車両150を派遣し、救護を行わせることができるので、電気自動車110が自力走行不能状態に陥る状態を効果的に回避することができる。
【0041】
このようなバッテリ切れが生じるタイミングの判定は、判定手段147において、充電度合い検出手段142で検出したSOCに基づいて行われる。判定手段147では、各電気自動車110について所定期間内にバッテリ切れが生じ得るか否かを判定する。具体的には、予めSOCの値に対するバッテリ切れが生じるまでの時間をマップとして記憶しておき、充電度合い検出手段142で検出したSOCから当該マップを参照して求めたバッテリ切れが生じるまでの時間が、所定期間より短いか否かにより判定が行われるとよい。尚、マップにて規定されるSOCとバッテリ切れが生じるまでの時間との関係は、救護対象である電気自動車110が搭載するバッテリ111や電気自動車110自体の種類や仕様毎に規定されていてもよい。この場合、受信アンテナ120やネットワーク130を介して各電気自動車110からその車種や搭載されているバッテリ111の型番等を識別するための識別情報を取得し、当該取得した識別情報に対応するマップからSOCとバッテリ切れが生じるまでの時間との関係を読み出すようにするとよい。
【0042】
また救護車両150の最適配置の他の算出方法としては、各電気自動車110におけるSOCの減少度合いを考慮に入れてもよい。上記(1)式を用いた算出方法では、各電気自動車110に対する救護車両150との相対的距離diと充電度合いSOCAiという2種類のパラメータを用いた。この方法では、これらの2つのパラメータに加え、充電度合い検出手段142が備える推定手段143において、各電気自動車110に搭載されたバッテリ111の充電度合い(SOC)の減少度合いとしてSOCの微分値(d(SOC)/dt)を算出し、その値をパラメータとして追加する。つまり、(1)式に、このSOCの減少度合い(d(SOC)/dt)をパラメータとして追加した指標
E’=f(Σ(di×SOCAi),d(SOC)/dt) (2)
が最小となるように、管理エリアAにおける救護車両150の最適配置を算出することができる。ここで、(2)式におけるfはΣ(di×SOCAi)と(d(SOC)/dt)とを変数とする任意の2変数関数である。
【0043】
そして判定手段147は、推定手段143の推定結果に基づき、所定期間内にバッテリ切れが生じ得るか否かを判定する。これにより、SOCの減少度合い(d(SOC)/dt)が速い電気自動車110に対して救護車両150が近く配置されるように、最適配置が決定される。これにより、バッテリ消費速度が速く電池切れになる可能性が高い電気自動車110を効率的に救護可能なように、最適配置を決定することができる。
【0044】
(変形例)
本システム100の変形例として、管理エリアAにおける電気自動車110に充電可能な充電手段が設けられた充電設備である充電スタンドの位置を規定した充電設備情報を予め記憶するデータベースを備えることができる。この場合、管理手段144はデータベースにアクセスして充電設備情報を取得することにより、管理エリアA内に存在する各電気自動車110と充電スタンドとの位置関係を特定することができる。
【0045】
尚、前記充電設備情報は、管理エリアA内における充電スタンドの位置に加えて、管理エリアA内の地図情報、例えば道路の幅や勾配、信号機の設置位置など、救護車両150が救護対象である電気自動車110に到達するまでの時間を評価する際に役立つ各種情報を含んでいるとよい。
【0046】
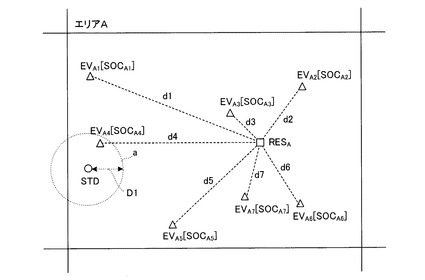
ここで、図4は図3に管理エリアA内に存在する充電スタンドSTD(図4において、白抜きの○シンボルで表記)の位置を追加して示す模式図である。管理サーバ140は充電設備情報に基づいて算出した各電気自動車110と充電スタンドSTDとの距離Dと、予め規定された閾値D1との大小を比較することにより、充電スタンドSTDから所定距離内に位置する電気自動車110を判定手段147の判定対象から除外するとよい(図4では除外対象エリアを円状の点線aで囲んで示してある)。充電スタンドSTDから所定距離内に位置する電気自動車110は、救護車両150が救護に向かうまでもなく、充電スタンドSTDで充電することによりバッテリ切れの状態に陥ることを容易に回避可能である。そのため、このような電気自動車110は本システム1で救護車両150の救護対象として管理する必要がなく、判定対象から除外しても問題はない。その結果、上記判定手段147において取り扱う電気自動車110の台数を削減できるので、管理サーバ110の処理負担を効率的に軽減することができる。
【0047】
また、判定手段147はステップS103において取得したSOCが所定値以上の電気自動車110を、上記ステップS104における算出対象から除外してもよい。SOCが所定値以上の電気自動車110は、充電度合いが十分に高く、バッテリ切れの状態に陥る可能性が低いため、救護車両150を必要としていないのは明らかである。そのため、このような電気自動車110は本システム1で救護車両150の救護対象として管理する必要がなく、処理から除外しても問題はない。その結果、判定手段147において取り扱う電気自動車110の台数を削減できるので、管理サーバ110の処理負担を効率的に軽減することができる。
【0048】
尚、上記実施例では管理サーバ140を管理拠点に設置した場合について説明したが、この管理サーバ140を例えば車載コンピュータなどとして救護車両150に搭載するように構成してもよい。また、救護車両150は各管理エリアAに一台ずつ配置するとしたが、同一エリア内に複数台配置してもよい。また、特定の管理エリアにおける電気自動車110の台数が増加した場合には、その台数に応じて他の管理エリア(例えば隣接するエリア)を担当する救護車両150が救援するようにしてもよい。また、各管理エリアの大きさは固定であるとして説明したが、エリア内に存在する救護車両や電気自動車の台数、天候、道路状況(例えば渋滞度合いなど)の各種条件に応じて可変に設定してもよい。
【0049】
尚、本発明における救護車両は、救護を行うために設計された専用の救護車両だけではなく、車両間でバッテリの電力の受け渡しが可能な充電設備が搭載された一般の電気自動車であってもよい。即ち、電気自動車110が充電手段を備える場合には、本発明の救護車両150として機能させてもよく、一般の電気自動車同士で救援し合えるように構成してもよい。
【0050】
以上説明したように、本発明によれば、救護車両150の配置を、充電度合いが少ない電気自動車110に対して救護車両150を近づけるように管理することで、バッテリ切れの状態に陥りそうな電気自動車110の停車位置に救護車両150を配備することができる。これにより、バッテリ切れに陥るおそれのある電気自動車110、又は、実際にバッテリ切れの状態に陥ってしまった電気自動車110に対して救護車両150を迅速に出動させることができ、救護車両150による充電度合いの回復に要する時間を効率的に短縮することができる。
【産業上の利用可能性】
【0051】
本発明は、バッテリに蓄えられた電力で駆動する電動機を動力源として走行する電気自動車がバッテリ充電残量不足状態に陥った際に、搭載した充電手段で前記バッテリを充電することにより復旧させる救護車両を管理する電気自動車の管理システムに利用可能である。
【符号の説明】
【0052】
100 管理システム
110 電気自動車
111 バッテリ
112 SOCセンサ
113 GPS信号受信機
114 通信部
120 受信アンテナ
130 ネットワーク回線
140 管理サーバ
141 位置検出手段
142 充電度合い検出手段
143 推定手段
144 管理手段
145 距離推定手段
146 指示手段
147 判定手段
150 救護車両
151 充電手段
152 GPS信号受信機
153 通信部
154 指示受信部
【特許請求の範囲】
【請求項1】
バッテリを搭載した電気自動車と、
前記バッテリに充電可能な充電手段を有する救護車両と、
前記電気自動車及び前記救護車両のそれぞれの位置を検出する位置検出手段と、
前記バッテリの充電度合いを検出する充電度合い検出手段と、
前記位置検出手段の検出結果に基づき、前記電気自動車と前記救護車両との相対的な位置関係を管理する管理手段と、
前記充電度合い検出手段により基づき、前記充電度合いが予め設定された所定値より少ないと判定されたとき、前記管理手段から前記救護車両に対して前記電気自動車との相対距離を近づけるように指示する指示手段と
を備えることを特徴とする電気自動車の管理システム。
【請求項2】
前記管理手段は、前記相対的な位置関係を、前記電気自動車がバッテリ切れを生じる前に前記救護車両が到達可能となるように管理することを特徴とする請求項1に記載の電気自動車の管理システム。
【請求項3】
前記位置検出手段は、複数の電気自動車のそれぞれの位置を検出し、
前記管理手段は、前記複数の電気自動車のそれぞれと前記救護車両との相対位置を管理することを特徴とする請求項1又は2に記載の電気自動車の管理システム。
【請求項4】
前記充電度合い検出手段の検出結果に基づき、前記複数の電気自動車について所定期間内に前記バッテリ切れが生じ得るか否かを判定する判定手段を更に備えることを特徴とする請求項1から3のいずれか一項に記載の電気自動車の管理システム。
【請求項5】
前記判定手段は、前記充電度合い検出手段で検出される充電度合いが所定値以上の電気自動車を判定対象から除外することを特徴とする請求項4に記載の電気自動車の管理システム。
【請求項6】
前記管理手段で管理可能な所定エリア内に、前記救護車両とは別に、前記バッテリに充電可能な充電手段を有する充電設備が設置されており、
前記判定手段は、前記充電設備の周囲の所定範囲内に存在する電気自動車を判定対象から除外することを特徴とする請求項4又は5に記載の電気自動車の管理システム。
【請求項7】
前記充電度合い検出手段は、前記バッテリの充電度合いの減少度合いを推定する推定手段を備え、
前記判定手段は、前記推定手段の推定結果に基づき、前記所定期間内に前記バッテリ切れが生じ得るか否かを判定することを特徴とする請求項4から6のいずれか一項に記載の電気自動車の管理システム。
【請求項8】
前記管理手段は、前記相対距離を推定する相対距離推定手段を更に備え、
前記充電度合い検出手段で検出される充電度合いと前記距離推定手段で推定される距離との積を、前記全ての電気自動車について足した値が最小となるように前記相対的な位置関係を管理することを特徴とする請求項1から7のいずれか一項に記載の電気自動車の管理システム。
【請求項1】
バッテリを搭載した電気自動車と、
前記バッテリに充電可能な充電手段を有する救護車両と、
前記電気自動車及び前記救護車両のそれぞれの位置を検出する位置検出手段と、
前記バッテリの充電度合いを検出する充電度合い検出手段と、
前記位置検出手段の検出結果に基づき、前記電気自動車と前記救護車両との相対的な位置関係を管理する管理手段と、
前記充電度合い検出手段により基づき、前記充電度合いが予め設定された所定値より少ないと判定されたとき、前記管理手段から前記救護車両に対して前記電気自動車との相対距離を近づけるように指示する指示手段と
を備えることを特徴とする電気自動車の管理システム。
【請求項2】
前記管理手段は、前記相対的な位置関係を、前記電気自動車がバッテリ切れを生じる前に前記救護車両が到達可能となるように管理することを特徴とする請求項1に記載の電気自動車の管理システム。
【請求項3】
前記位置検出手段は、複数の電気自動車のそれぞれの位置を検出し、
前記管理手段は、前記複数の電気自動車のそれぞれと前記救護車両との相対位置を管理することを特徴とする請求項1又は2に記載の電気自動車の管理システム。
【請求項4】
前記充電度合い検出手段の検出結果に基づき、前記複数の電気自動車について所定期間内に前記バッテリ切れが生じ得るか否かを判定する判定手段を更に備えることを特徴とする請求項1から3のいずれか一項に記載の電気自動車の管理システム。
【請求項5】
前記判定手段は、前記充電度合い検出手段で検出される充電度合いが所定値以上の電気自動車を判定対象から除外することを特徴とする請求項4に記載の電気自動車の管理システム。
【請求項6】
前記管理手段で管理可能な所定エリア内に、前記救護車両とは別に、前記バッテリに充電可能な充電手段を有する充電設備が設置されており、
前記判定手段は、前記充電設備の周囲の所定範囲内に存在する電気自動車を判定対象から除外することを特徴とする請求項4又は5に記載の電気自動車の管理システム。
【請求項7】
前記充電度合い検出手段は、前記バッテリの充電度合いの減少度合いを推定する推定手段を備え、
前記判定手段は、前記推定手段の推定結果に基づき、前記所定期間内に前記バッテリ切れが生じ得るか否かを判定することを特徴とする請求項4から6のいずれか一項に記載の電気自動車の管理システム。
【請求項8】
前記管理手段は、前記相対距離を推定する相対距離推定手段を更に備え、
前記充電度合い検出手段で検出される充電度合いと前記距離推定手段で推定される距離との積を、前記全ての電気自動車について足した値が最小となるように前記相対的な位置関係を管理することを特徴とする請求項1から7のいずれか一項に記載の電気自動車の管理システム。
【図1】


【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公開番号】特開2012−190412(P2012−190412A)
【公開日】平成24年10月4日(2012.10.4)
【国際特許分類】
【出願番号】特願2011−55603(P2011−55603)
【出願日】平成23年3月14日(2011.3.14)
【出願人】(000006286)三菱自動車工業株式会社 (2,892)
【Fターム(参考)】
【公開日】平成24年10月4日(2012.10.4)
【国際特許分類】
【出願日】平成23年3月14日(2011.3.14)
【出願人】(000006286)三菱自動車工業株式会社 (2,892)
【Fターム(参考)】
[ Back to top ]