
電気自動車の緊急通知システム
【課題】電池切れによって車両及びナビゲーションシステムが停止する虞がある場合に、ドライバーが車両の現在位置情報を確実に取得できるようにする。
【解決手段】モータ2及びナビゲーションシステム4へ電力を供給する電池5の電圧を電池管理ECU6が監視し、ナビゲーションシステム4の制御装置9は電池管理ECU6が監視している電池5の電圧情報を取得し、この取得した電圧情報がモータ2及びナビゲーションシステム4の駆動可能下限電圧となったときに、制御装置9は有線又は近距離無線によって接続されている携帯端末7に車両1の現在位置情報を直接送信する。
【解決手段】モータ2及びナビゲーションシステム4へ電力を供給する電池5の電圧を電池管理ECU6が監視し、ナビゲーションシステム4の制御装置9は電池管理ECU6が監視している電池5の電圧情報を取得し、この取得した電圧情報がモータ2及びナビゲーションシステム4の駆動可能下限電圧となったときに、制御装置9は有線又は近距離無線によって接続されている携帯端末7に車両1の現在位置情報を直接送信する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、電池切れが生じる虞のある場合に車両の現在位置情報をドライバーに通知する電気自動車の緊急通知システムに関する。
【背景技術】
【0002】
自動車の運転において予期せぬ燃料切れによる車両停止はしばしば起こり得る事象である。このとき、ロードサービスや燃料スタンドに救助依頼の連絡をするために、ドライバーは車両を停止させている地点の位置情報、例えば住所情報や座標情報などを救助依頼先に的確に伝える必要がある。この場合、車両に搭載されたナビゲーションシステムが持つ現在位置情報は極めて有用であると考える。
【0003】
例えば、特許文献1では、燃料切れやバッテリー上がりなど、車両の異常発生時にはナビゲーションシステムから取得した車両の位置情報などを携帯電話を介してサーバに送信し、このサーバから最寄りのサービスステーションの情報を取得してナビゲーションシステムに表示させる技術が開示されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2002−277262号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
通常、ガソリン車やハイブリッド車のように車両にエンジンが搭載されているものにおいては、ナビゲーションシステムはエンジンに供給される燃料とは別の電池で動作している。このため、エンジンが燃料切れによって停止したとしても、ナビゲーションシステムは電池によって暫くの間は動作可能である。これにより、車両が燃料切れによって停止した後でも、暫くの間は、ナビゲーションシステムを用いてサーバと通信したり、また、ドライバー自信がナビゲーションシステムを操作して現在位置情報などを確認したりすることができる。
【0006】
一方、電気自動車のように車両を駆動させるモータとナビゲーションシステムとで電池を共用しているものにおいては、燃料切れ(電池切れ)によってモータが停止するのとほぼ同時にナビゲーションシステムも停止してしまう。このため、従来の電気自動車においては、電池切れとなって車両が停止した後はナビゲーションシステムがサーバと通信できないだけではなく、ドライバー自身もナビゲーションシステムを操作して位置情報などを確認することができないという事情があった。
【0007】
ところで、特許文献1の発明においては、携帯電話と接続されるサーバが必要となりサーバの設置や管理に大きなコストがかかることになる。さらに、位置情報などの通信には携帯電話とサーバとが接続されていることが前提であるため、例えばトンネル内などの携帯電話の圏外においては、サーバとの通信が行われず、救助依頼に必要な現在位置情報などが取得できないまま燃料切れによって車両が停止してしまうという不具合もあった。
【0008】
本発明は上記した事情に鑑みてなされたものであり、その目的は、電池切れによって車両及びナビゲーションシステムが停止する虞がある場合に、ドライバーが車両の現在位置情報を確実に取得でき、しかも簡単な構成且つ低コストで実施可能な電気自動車の緊急通知システムを提供することにある。
【課題を解決するための手段】
【0009】
請求項1の発明によれば、車両を駆動させるモータと、車両の現在位置情報の取得が可能な制御装置とに電力を供給する電池の電圧が電池監視装置により監視され、前記制御装置は前記電池監視装置と接続されて前記電池の電圧情報を取得し、この取得した前記電池の電圧情報が前記モータ及び前記制御装置の動作可能下限電圧となったときには、取得した車両の現在位置情報が有線又は近距離無線によって直接携帯端末に送信される。この結果、電池切れが生じてモータ及び制御装置が停止してしまった場合でも、これらが停止する直前に携帯端末に車両の現在位置情報が送信されているため、ドライバーは車両停止後の救助要請に備えて必要な情報を得ることができる。
【0010】
また、制御装置はサーバなどを介さずに直接現在位置情報を携帯端末に送信するため、サーバなどの設置や管理コストがかかることなく、低コストに構成することができる。さらに、携帯端末はサーバなどと通信する必要がないため、トンネル内などの電波状況が悪い場合であっても、確実に現在位置情報を取得することができる。
【0011】
請求項2の発明においては、前記請求項1に記載の電気自動車の緊急通知システムにおいて、さらに、前記制御装置用の補助電池を備え、前記制御装置が、前記取得した前記電池の電圧情報が前記動作可能下限電圧となってから、前記補助電池の電源を当該制御装置自身に給電し、前記車両の現在位置情報を有線又は近距離無線によって直接前記携帯端末に送信するようにしている。
【0012】
これによれば、電池が動作可能下限電圧となった以後の制御装置の電源を補助電池により担保でき、制御装置による携帯端末への現在位置情報の送信動作を保障できる。
又、請求項3の発明においては、前記請求項2に記載の電気自動車の緊急通知システムにおいて、前記動作可能下限電圧が、前記モータが回転できる下限電圧を含む一定電圧幅範囲に設定され、前記制御装置が、前記取得した前記電池の電圧情報が当該一定電圧幅範囲の動作可能下限電圧に入ったときには、前記補助電池の電源を当該制御装置自身に給電し、前記車両の現在位置情報を有線又は近距離無線によって直接前記携帯端末に送信するようにしている。
【0013】
同一車種の車両であっても、モータが回転できる下限電圧には、車両個々に若干のばらつきがあり、そこで、動作可能下限電圧に一定電圧幅範囲をもたせた上記請求項3の発明によれば、いずれの車両においても実使用上問題のない動作可能下限電圧を設定できる。
【0014】
請求項4の発明においては、前記請求項2又は3に記載の電気自動車の緊急通知システムにおいて、さらに、前記モータの停止を監視するモータ停止監視手段を備え、前記制御装置が、前記取得した前記電池の電圧情報が前記動作可能下限電圧となったときには、前記補助電池の電源を当該制御装置自身に給電し、前記モータ停止監視手段がモータの停止を判断したときに前記車両の現在位置情報を有線又は近距離無線によって直接前記携帯端末に送信するようにしている。
【0015】
これによれば、モータが停止したときに携帯端末への現在位置情報の送信を行うから、車両の実際の停止位置と、携帯端末へ送信された現在位置情報での車両位置とのずれが殆ど無くなる。
【0016】
又、請求項5の発明においては、前記請求項2又は3に記載の電気自動車の緊急通知システムにおいて、さらに、車両が停止したか否かを車輪の回転から判断する車両停止判断手段を備え、前記制御装置が、前記取得した前記電池の電圧情報が前記動作可能下限電圧となったときには、前記補助電池の電源を当該制御装置自身に給電し、前記車両停止判断手段が車両停止を判断したときに前記車両の現在位置情報を有線又は近距離無線によって直接前記携帯端末に送信するようにしている。
【0017】
これによれば、実際に車両が停止した位置で、当該位置の車両の現在位置情報を送信するから、車両の実際の停止位置と、携帯端末へ送信された現在位置情報での車両位置とのずれが全く無くなる。
【0018】
又、請求項6の発明においては、前記請求項2を引用する請求項4に記載の電気自動車の緊急通知システムにおいて、前記取得した前記電池の電圧情報が前記動作可能下限電圧となったときには、前記モータ停止検出信号を取得したときに前記補助電池の電源を当該制御装置自身に給電し、前記車両の現在位置情報を有線又は近距離無線によって直接前記携帯端末に送信するようにしている。
【0019】
これによれば、電池の電圧が動作可能下限電圧となってから、さらにモータ停止検出信号を取得したときに、前記補助電池の電源を当該制御装置自身に給電するから、補助電池が担う電圧をさらに小さくできる。つまり、前記電池の残量容量が減少してゆくと、その減少する電圧はまず動作可能下限電圧を通過した後、モータが実際に停止する電圧を通過することになる。この場合、前記電池の電圧がモータが実際に停止する電圧となったところで、前記制御装置の電源として前記補助電池を使用開始すると、この使用開始時点での電圧を補助電池で保障すれば良いから、補助電池の使用開始時点を、電圧情報が前記動作可能下限電圧となった時点とする場合に比して、補助電池が担う電圧つまり定格電圧を小さくすることができる。この結果、補助電池の小型化を図り得、ひいては装置全体の大型化、複雑化及び重厚化を回避できる。
【0020】
又、請求項7の発明においては、前記請求項2を引用する請求項5に記載の電気自動車の緊急通知システムにおいて、前記取得した前記電池の電圧情報が前記動作可能下限電圧となったときには、前記車両停止判断手段が車両停止を判断したときに前記補助電池の電源を当該制御装置自身に給電し、前記車両の現在位置情報を有線又は近距離無線によって直接前記携帯端末に送信するようにしている。
【0021】
これによれば、補助電池が担う電圧をさらに小さくできる。すなわち、前記電池の残量容量が減少してゆくと、その減少する電圧は、まず動作可能下限電圧を通過した後、モータが実際に停止する電圧を通過することになる。この場合、モータが停止してから、車両が停止するまで、タイムラグが考えられるから、車両が停止したことが検出されたときにはさらに電池の電圧が低下している。そして、この車両停止が検出されたところで、前記制御装置の電源として前記補助電池を使用開始すると、この使用開始時点での電圧を補助電池で保障すれば良いから、補助電池の使用開始時点を、電圧情報が前記モータ停止時の電圧となった時点とする場合に比して、補助電池が担う電圧つまり定格電圧を小さくすることができる。この結果、補助電池のさらなる小型化を図り得、ひいては装置全体の大型化及び複雑化並びに重厚化の防止に一層効果的である。
【図面の簡単な説明】
【0022】
【図1】本発明の第1実施形態を示すブロック図
【図2】ナビゲーションシステムを示す電気的構成のブロック図
【図3】制御装置の制御内容を示すフローチャート
【図4】本発明の第2実施形態を示す図1相当図
【図5】図2相当図
【図6】図3相当図
【図7】本発明の第3実施形態を示す図3相当図
【図8】本発明の第4実施形態を示す図3相当図
【図9】本発明の第5実施形態を示す図3相当図
【図10】本発明の第6実施形態を示す図3相当図
【発明を実施するための形態】
【0023】
以下、本発明の第1実施形態について図面を参照しながら説明する。
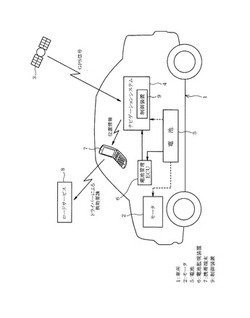
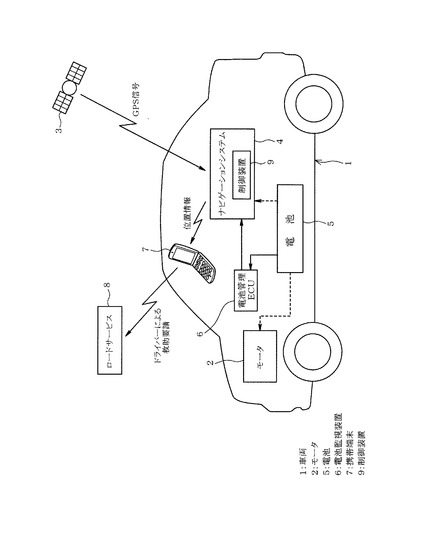
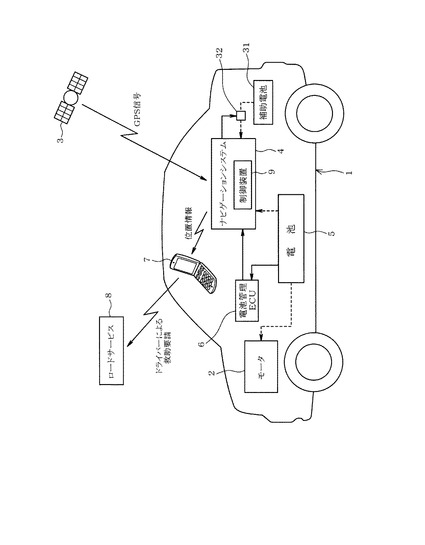
図1は、本発明における電気自動車の緊急通知システムの全体構成を概略的に示している。本発明に係る電気自動車の緊急通知システムは、車両1を駆動させるモータ2と、GPS(Global Positioning System)用人工衛星3からGPS信号を受けて自車の車両位置の検出が可能なナビゲーションシステム4と、モータ2及びナビゲーションシステム4に電力を供給する例えば二次電池からなる電池5と、この電池5の電圧を監視及び管理する電池監視装置たる電池管理ECU(Electronic Control Unit)6とから構成されている。このナビゲーションシステム4は、後述する制御装置9を含んで構成されており、携帯端末7(例えば、ドライバーが所有する携帯電話)と、例えばUSBによる有線接続やBluetooth(登録商標)による近距離無線によって後述する送受信部17を介して通信可能に接続される。
【0024】
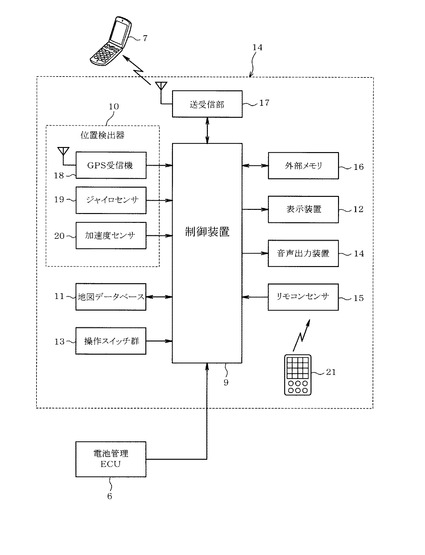
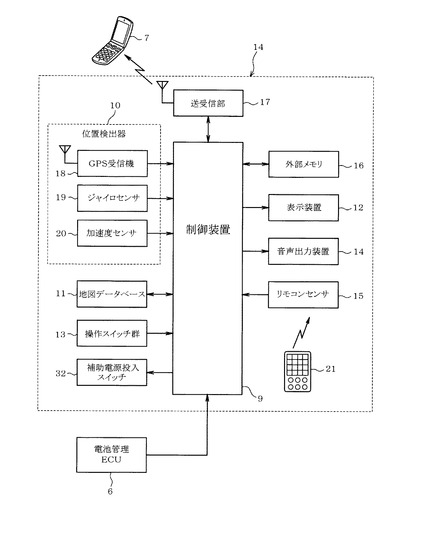
前記ナビゲーションシステム4は、図2に示すように、そのナビゲーション動作を制御する機能を有した制御装置9に、位置検出器10、地図データベース11、表示装置12、操作スイッチ群13、音声出力装置14、リモコンセンサ15、外部メモリ16、送受信部17などを接続して構成されている。
【0025】
制御装置9は、CPU、ROM、RAM、I/Oインタフェース及びこれらを接続するバスラインなど(何れも図示せず)を備えたマイクロコンピュータにより構成されている。この制御装置9は電池管理ECU6に接続されていて、電池管理ECU6から送信される電池5の電圧情報をもとに、定期的に電池5の残量を確認している。
【0026】
位置検出器10は、GPS受信機18、ジャイロセンサ19、車両の加速度を検出する加速度センサ20などの位置検出要素から構成されている。位置検出器10は、上記各位置検出要素の検出信号を補間しながら高精度に車両の位置を検出するようになっている。なお、要求される検出精度によってはこれらの一部のみで構成してもよいし、さらに、車両の速度を検出する車速センサなどを加えてもよい。
【0027】
地図データベース11は、CD−ROM、DVD−ROM、或いはハードディスク、不揮発性の半導体メモリなどのような大容量の情報記録媒体を利用して構成されたものであり、地図表示のための地図描画用データ、マップマッチング、経路探索、経路案内などの種々の処理に必要な道路データ、交差点の詳細データから成る交差点データ、背景レイヤのための背景データ、地名などを表示するための地名データの他に、住宅街、住宅が疎らな区域、工業地区、施設情報(病院とか、公園、店舗)などのデータベース、電話番号と施設の対応を示す電話番号データベースなど、多様な地図データが記憶されている。
【0028】
表示装置12は、経路案内などのための表示装置であり、車両1の運転席近傍に設置される。
操作スイッチ群13は、表示装置12の周辺に配置されたメカニカルスイッチや当該表示装置12のディスプレイ上に形成されたタッチパネルスイッチなどから成り、各種のデータや設定事項などの操作に係るコマンドを制御装置9に与えるために設けられている。
【0029】
音声出力装置14は、経路案内に関連した音声ガイドを行うためのものであり、音声合成回路、アンプ、スピーカなどを備えたものである。
リモコンセンサ15は、リモコン21からの操作信号を受信して制御装置9に与える構成となっている。
【0030】
外部メモリ16は、フラッシュメモリなどのデータ書き換え可能な不揮発性メモリより構成されたもので、例えば他の規格の情報記録媒体に対応するためのプログラムソフトを記憶したり、特定データ(走行軌跡の履歴やデジタルカメラにより取り込んだ任意の画像データなど)の保存や呼出などを行ったりするために設けられている。
【0031】
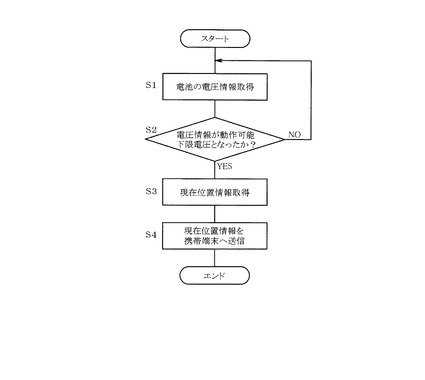
次に、上記した構成の作用について、図3も参照して説明する。
まず、車両1の主電源が投入されると、電池5からモータ2及びナビゲーションシステム4へ電力が供給されて、これらモータ2及びナビゲーションシステム4が始動する。するとナビゲーションシステム4内の制御装置9は、電池管理ECU6から電池5の電圧情報を取得する(ステップS1)。次に、制御装置9は、ステップS1で取得した電池5の電圧情報と、予め設定されたモータ2及びナビゲーションシステム4の動作が可能な下限値である動作可能下限電圧とを比較する(ステップS2)。このとき、取得した電池5の電圧情報が動作可能下限電圧を上回っていれば(ステップS2でNOの場合)ステップS1へ戻る。通常、電池切れなどが生じていなければステップS1及びステップS2を繰り返して、モータ2の駆動及びナビゲーションシステム4の動作が連続的に行われる。
【0032】
ちなみに、実際の使用においては、モータ2の動作が可能な下限電圧とナビゲーションシステム4の動作が可能な下限電圧とが異なる場合も考えられるが、通常モータ2の動作可能下限電圧がナビゲーションシステム4の動作可能下限電圧より大であるから、この場合はモータ2の下限電圧を下限とした範囲内で前記動作可能下限電圧を設定すれば良い。
【0033】
次に、電池5の電圧が低下して、ステップS1において取得した電池5の電圧情報が、ステップS2で動作可能下限電圧となった場合(ステップS2でYESの場合)には、制御装置9は、電池5の電圧が低下してあと一定時間でモータ2及びナビゲーションシステム4が停止すると判断する。このとき制御装置9は、位置検出器10から自車の現在位置情報を取得すると共に地図データベース11の地図情報も取得する(ステップS3)。
【0034】
なお、実際には前記電池5の電圧情報は経時的に変化していくことから、予め設定する動作可能下限電圧に一定の幅を持たせて、その幅の範囲内に取得した電池5の電圧情報が入ったと判断されたときに、ステップS2からステップS3への移行が行われる。このため、ステップS2からステップS3へ移行したときの電池5の電圧は、継続してモータ2を駆動させることは困難であるが、携帯端末7と制御装置9との短時間の通信であれば可能な程度に残されている。
【0035】
そして、制御装置9は有線又は近距離無線で接続されている携帯端末7に直接現在位置情報(住所情報、座標情報など)を送信する(ステップS4)。
ステップS4で現在位置情報を送信後、モータ2及びナビゲーションシステム4は、電池5の電池切れによって停止される。このとき、ドライバーはロードサービス8(図1参照)へ救助要請をするに際し、制御装置9から携帯端末7へ送信された車両の現在位置情報をもとに、救助要請に必要な車両の現住所を正確に伝えることができる。
【0036】
このような本実施形態においては、次の様な作用効果を得ることができる。
本実施形態の構成によれば、車両1を駆動させるモータ2と、車両1の現在位置情報の取得が可能な制御装置9を含むナビゲーションシステム4とに電力を供給する電池5の電圧が、電池管理ECU6により監視され、前記制御装置9は前記電池管理ECU6と接続されて前記電池5の電圧情報を取得し、この取得した前記電池5の電圧情報が前記モータ2及び前記制御装置9を含むナビゲーションシステム4の動作可能下限電圧となったときには、取得した車両1の現在位置情報が有線又は近距離無線によって直接携帯端末7に送信される。この結果、電池切れが生じてモータ2及びナビゲーションシステム4が停止してしまった場合でも、これらが停止する直前に携帯端末7に車両1の現在位置情報が送信されているため、ドライバーは車両1の停止後の救助要請に備えて必要な情報を得ることができる。
【0037】
また、制御装置9はサーバなどを介さずに直接車両1の位置情報を携帯端末7に送信するため、サーバなどの設置や管理コストがかかることなく、低コストに構成することができる。さらに、携帯端末7はサーバなどと通信する必要がないため、トンネル内などの電波状況が悪い場合であっても、確実に車両1の現在位置情報を取得することができる。
【0038】
さらに、電池5の電圧が動作可能下限電圧となった場合、即ち、電池切れによってモータ2及びナビゲーションシステム4が停止してしまう直前に、車両1の現在位置情報が制御装置9から携帯端末7へ送信される。このため、ドライバーは車両1が電池切れによって停止する直前の現在位置情報を取得することができる。これにより、携帯端末7に車両1の現在位置情報を送信した後、さらにドライバーが車両1を動かしてしまい、携帯端末7に送信された車両1の現在位置情報と、実際の車両1の現在位置情報とが相違してしまう虞もない。従って、ドライバーは正確な自車の現在地情報を救助依頼先に伝えることができる。
【0039】
次に本発明の第2実施形態について図4ないし図6を参照して説明する。上記第1実施形態と同一構成又は同一機能部分には同一符号を付して、主に異なる部分について説明する。この第2実施形態では、例えば一次電池からなる補助電池31をさらに備えている。この補助電池31は制御装置9の補助電源用であり、この場合この制御装置9を含むナビゲーションシステム4全体の補助電源も共用する。この補助電池31には補助電源投入手段としての例えばリレースイッチからなる補助電源投入スイッチ32が備えられており、この補助電源投入スイッチ32は例えば常開形(常時オフ)であり、前記制御装置9がこの補助電池用切替スイッチ32を閉路(オン)制御し得るようになっている。
【0040】
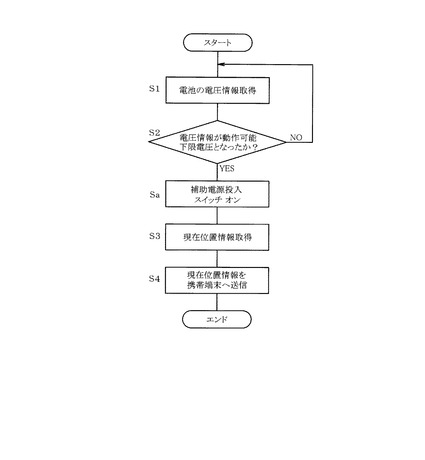
前記制御装置9の制御内容について図6を参照して説明する。この図6においては、ステップSaが前記第1実施形態の図4とは異なる。すなわち、ステップS2において、取得した電圧情報が動作可能下限電圧となったことが判断されると(ステップS2の「YES」)、ステップSaに移行して補助電源投入スイッチ32をオンさせて、当該制御装置9自身に補助電池31の電源を供給(給電)する。この後、第1実施形態同様、位置検出器10から自車の現在位置情報を取得すると共に地図データベース11の地図情報も取得し(ステップS3)、携帯端末7に直接現在位置情報(住所情報、座標情報など)を送信する(ステップS4)。
【0041】
この第2実施形態によれば、主電源である電池5が動作可能下限電圧となった以後の制御装置9の電源を補助電源である補助電池31により担保でき、制御装置9による携帯端末7への現在位置情報の送信動作を保障できる。なお、前記補助電源投入手段としてはリレースイッチからなる前記補助電源投入スイッチ32に限られるものではない。
【0042】
なお、この第2実施形態において、前記動作可能下限電圧を、前記モータが回転できる下限電圧を含む一定電圧幅範囲に設定しても良く、この場合、前記制御装置9を、前記取得した前記電池の電圧情報が当該一定電圧幅範囲の動作可能下限電圧に入ったときには、前記補助電池31から当該制御装置9自身に給電し、車両の現在位置情報を前記携帯端末7に送信するようにする。
【0043】
同一車種の車両であってもモータが回転できる下限電圧には、車両個々に若干のばらつきがあるが、上述のようにすることにより、いずれの車両においても実使用上問題のない動作可能下限電圧を設定できる。
【0044】
図7は本発明の第3実施形態に関連するフローチャートを示している。この第3実施形態について説明すると、制御装置9には図示はしないがモータ2の回転信号が入力されるようになっており、制御装置9はこの回転信号に基づいてモータ2の停止を監視するモータ停止監視手段としての機能も備えている。なお、このモータ停止監視手段は、制御装置9以外の別の回転検出装置などで構成しても良い。
【0045】
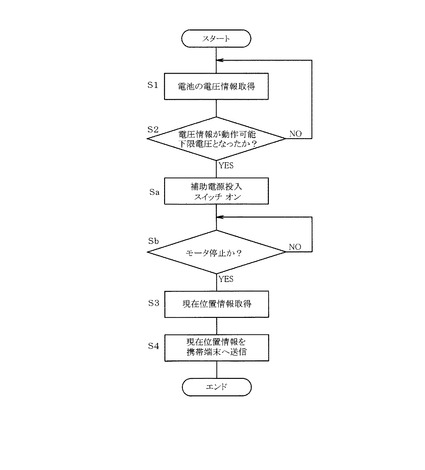
この第3実施形態においては、第2実施形態で示す図6とはステップSbを追加した点が異なる。すなわち、ステップS2で電圧情報が動作可能下限電圧となったときに、既述のステップSaで、補助電源投入スイッチ32をオンさせて制御装置9自身の電源として補助電池31の電源を供給(給電)し、そして、ステップSbで、モータ2が停止したか否かを判断し、モータ2の停止が判断されると、既述のように自車の現在位置情報を取得し(ステップS3)、携帯端末7に直接現在位置情報(住所情報、座標情報など)を送信する(ステップS4)。
【0046】
この第3実施形態によれば、モータ2が停止したときに携帯端末7への現在位置情報の送信を行うから、車両1の実際の停止位置と、携帯端末へ送信された現在位置情報での車両位置とのずれが殆ど無くなる。
さらにこの第3実施形態によれば、主電源である電池5が動作可能下限電圧となったことに引き続いて補助電源である補助電池31を投入するから、制御装置9の電源が一瞬たりとも切れることがなく、制御装置9の動作が正常に機能する。
【0047】
図8は本発明の第4実施形態に関連するフローチャートを示している。この第4実施形態について説明すると、制御装置9には図示はしないが車輪の回転信号が入力されるようになっており、制御装置9はこの回転信号の入力が無いか否かに基づいて車両1が停止したか否かを監視する車両停止判断手段としての機能も備えている。なお、この車両停止判断手段は、制御装置9以外の別の車両停止判断装置などで構成しても良い。
【0048】
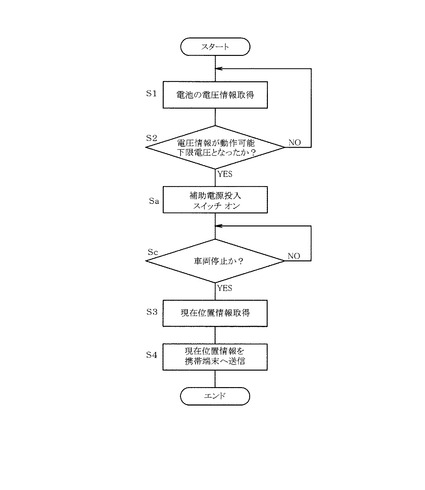
この第4実施形態における図8は、前記第3実施形態の図7と次の点が異なる。すなわち、ステップS2で電圧情報が動作可能下限電圧となったときに、既述のステップSaで、補助電源投入スイッチ32をオンさせて制御装置9自身の電源として補助電池31の電源を供給(給電)し、そして、次のステップScで、車両1が停止したか否かを判断し、車両1の停止が判断されると、自車の現在位置情報を取得し(ステップS3)、携帯端末7に直接現在位置情報(住所情報、座標情報など)を送信する(ステップS4)。
【0049】
この第4実施形態によれば、車両1が実際に停止したときに携帯端末7への現在位置情報の送信を行うから、車両1の実際の停止位置と、携帯端末へ送信された現在位置情報での車両位置とのずれが全く無くなる。ちなみに、モータ2の回転停止を判断して現在位置情報を送信する場合だと、モータ2の回転停止から惰性で車輪が回転(つまり車両1が動作)するおそれがあって、実際の車両停止位置と、送信した現在位置情報とが極めて僅かにずれるおそれがあるが、この第4実施形態では、上述したように車両1の実際の停止に基づいて現在位置情報を送信するから両位置のずれは全く無い。
さらにこの第4実施形態によれば、上記第3実施形態と同様、主電源である電池5が動作可能下限電圧となったことに引き続いて補助電源である補助電池31を投入するから、制御装置9の電源が一瞬たりとも切れることがなく、制御装置9の動作が正常に機能する。
【0050】
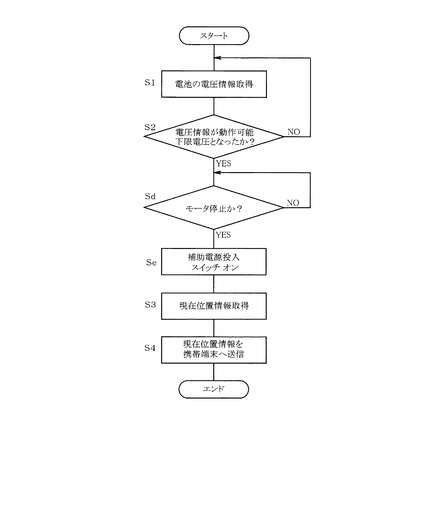
又、図9は本発明の第5実施形態を示している。この実施形態においては次の点が図7の第3実施形態と異なる。すなわち、ステップS2で電圧情報が動作可能下限電圧となったときに、ステップSdで、モータ2が停止したか否かを判断し、モータ2の停止が判断されると、ステップSeで補助電源投入スイッチ32をオンさせて制御装置9自身の電源として補助電池31の電源を供給(給電)し、そして、自車の現在位置情報を取得し(ステップS3)、携帯端末7に現在位置情報を送信する(ステップS4)。
【0051】
この第5実施形態によれば、電池5の電圧が動作可能下限電圧となってから、さらにモータ2の停止が判断されたときに、前記補助電池31から当該制御装置9自身に給電するから、補助電池31が担う電圧をさらに小さくできる。詳述すると、前記電池5の残量容量が減少してゆくと、その減少する電圧はまず動作可能下限電圧を通過した後、モータ2が実際に停止する電圧を通過することになる。この場合、前記電池5の電圧がモータ2が実際に停止する電圧となったところで、前記制御装置9の電源として前記補助電池31を使用開始すると、この使用開始時点での電圧を補助電池31で保障すれば良いから、補助電池31の使用開始時点を、電圧情報が前記動作可能下限電圧となった時点とする場合に比して、補助電池31が担う電圧つまり定格電圧を小さくすることができる。この結果、補助電池31の小型化を図り得、ひいては装置全体の大型化、複雑化及び重厚化を回避できる。
【0052】
この場合、補助電池31は、緊急時のための予備的なものであり、一次電池が使用されることが多いから、できるだけ定格電圧が低くて体格も小さいものが要求されるが、この実施形態ではその要求を満足できるようになる。
【0053】
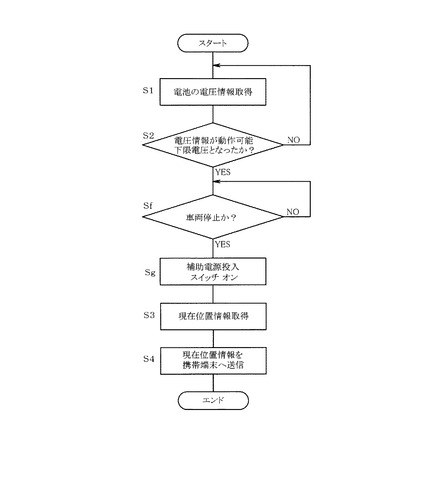
又、図10は本発明の第6実施形態を示しており、この実施形態においては次の点が図8の第4実施形態と異なる。すなわち、ステップS2で電圧情報が動作可能下限電圧となったときに、ステップSfで、車両1が停止したか否かを判断し、車両1の停止が判断されると、ステップSgで補助電源投入スイッチ32をオンさせて制御装置9自身の電源として補助電池31の電源を供給(給電)し、そして、自車の現在位置情報を取得し(ステップS3)、携帯端末7に現在位置情報を送信する(ステップS4)。
【0054】
この第6実施形態によれば、補助電池31が担う電圧をさらに小さくできる。これについて詳述する。前記電池5の残量容量が減少してゆくと、その減少する電圧は、前述したように、まず動作可能下限電圧を通過した後、モータ2が実際に停止する電圧を通過することになる。この場合、モータ2が停止してから、車両1が停止するまで、タイムラグが考えられるから、車両1が停止したことが検出されたときにはさらに電池5の電圧が低下している。
【0055】
ここで本実施形態によれば、この車両停止が検出されたところで、前記制御装置9の電源として前記補助電池31を使用開始するから、この使用開始時点での電圧を補助電池31で保障すれば良いから、補助電池31の使用開始時点を、電圧情報が前記モータ停止時の電圧となった時点とする場合に比して、補助電池31が担う電圧つまり定格電圧を小さくすることができる。この結果、補助電池31のさらなる小型化を図り得、ひいては装置全体の大型化及び複雑化並びに重厚化の防止に一層効果的である。
【0056】
なお、上記各実施形態では、制御装置9をナビゲーションシステム4に含む構成としたが、ナビゲーションシステム4とは別体の制御装置9を外付けに設ける構成としても良い。
また、制御装置9と携帯端末7との接続はUSBやBluetoothに限られず、制御装置9と携帯端末7とがサーバなどを介さずに直接情報通信が行える形態で接続されていれば良い。
さらに、携帯端末は前記携帯電話に限られず、有線又は近距離無線によって制御装置9と接続可能な機能を有するPDA(Personal Digital Assistant)などでも良い。
【符号の説明】
【0057】
図面中、1は車両、2はモータ、5は電池、6は電池管理ECU(電池監視装置、モータ停止監視手段、車両停止判断手段、)、7は携帯端末、9は制御装置、31は補助電池を示す。
【技術分野】
【0001】
本発明は、電池切れが生じる虞のある場合に車両の現在位置情報をドライバーに通知する電気自動車の緊急通知システムに関する。
【背景技術】
【0002】
自動車の運転において予期せぬ燃料切れによる車両停止はしばしば起こり得る事象である。このとき、ロードサービスや燃料スタンドに救助依頼の連絡をするために、ドライバーは車両を停止させている地点の位置情報、例えば住所情報や座標情報などを救助依頼先に的確に伝える必要がある。この場合、車両に搭載されたナビゲーションシステムが持つ現在位置情報は極めて有用であると考える。
【0003】
例えば、特許文献1では、燃料切れやバッテリー上がりなど、車両の異常発生時にはナビゲーションシステムから取得した車両の位置情報などを携帯電話を介してサーバに送信し、このサーバから最寄りのサービスステーションの情報を取得してナビゲーションシステムに表示させる技術が開示されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2002−277262号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
通常、ガソリン車やハイブリッド車のように車両にエンジンが搭載されているものにおいては、ナビゲーションシステムはエンジンに供給される燃料とは別の電池で動作している。このため、エンジンが燃料切れによって停止したとしても、ナビゲーションシステムは電池によって暫くの間は動作可能である。これにより、車両が燃料切れによって停止した後でも、暫くの間は、ナビゲーションシステムを用いてサーバと通信したり、また、ドライバー自信がナビゲーションシステムを操作して現在位置情報などを確認したりすることができる。
【0006】
一方、電気自動車のように車両を駆動させるモータとナビゲーションシステムとで電池を共用しているものにおいては、燃料切れ(電池切れ)によってモータが停止するのとほぼ同時にナビゲーションシステムも停止してしまう。このため、従来の電気自動車においては、電池切れとなって車両が停止した後はナビゲーションシステムがサーバと通信できないだけではなく、ドライバー自身もナビゲーションシステムを操作して位置情報などを確認することができないという事情があった。
【0007】
ところで、特許文献1の発明においては、携帯電話と接続されるサーバが必要となりサーバの設置や管理に大きなコストがかかることになる。さらに、位置情報などの通信には携帯電話とサーバとが接続されていることが前提であるため、例えばトンネル内などの携帯電話の圏外においては、サーバとの通信が行われず、救助依頼に必要な現在位置情報などが取得できないまま燃料切れによって車両が停止してしまうという不具合もあった。
【0008】
本発明は上記した事情に鑑みてなされたものであり、その目的は、電池切れによって車両及びナビゲーションシステムが停止する虞がある場合に、ドライバーが車両の現在位置情報を確実に取得でき、しかも簡単な構成且つ低コストで実施可能な電気自動車の緊急通知システムを提供することにある。
【課題を解決するための手段】
【0009】
請求項1の発明によれば、車両を駆動させるモータと、車両の現在位置情報の取得が可能な制御装置とに電力を供給する電池の電圧が電池監視装置により監視され、前記制御装置は前記電池監視装置と接続されて前記電池の電圧情報を取得し、この取得した前記電池の電圧情報が前記モータ及び前記制御装置の動作可能下限電圧となったときには、取得した車両の現在位置情報が有線又は近距離無線によって直接携帯端末に送信される。この結果、電池切れが生じてモータ及び制御装置が停止してしまった場合でも、これらが停止する直前に携帯端末に車両の現在位置情報が送信されているため、ドライバーは車両停止後の救助要請に備えて必要な情報を得ることができる。
【0010】
また、制御装置はサーバなどを介さずに直接現在位置情報を携帯端末に送信するため、サーバなどの設置や管理コストがかかることなく、低コストに構成することができる。さらに、携帯端末はサーバなどと通信する必要がないため、トンネル内などの電波状況が悪い場合であっても、確実に現在位置情報を取得することができる。
【0011】
請求項2の発明においては、前記請求項1に記載の電気自動車の緊急通知システムにおいて、さらに、前記制御装置用の補助電池を備え、前記制御装置が、前記取得した前記電池の電圧情報が前記動作可能下限電圧となってから、前記補助電池の電源を当該制御装置自身に給電し、前記車両の現在位置情報を有線又は近距離無線によって直接前記携帯端末に送信するようにしている。
【0012】
これによれば、電池が動作可能下限電圧となった以後の制御装置の電源を補助電池により担保でき、制御装置による携帯端末への現在位置情報の送信動作を保障できる。
又、請求項3の発明においては、前記請求項2に記載の電気自動車の緊急通知システムにおいて、前記動作可能下限電圧が、前記モータが回転できる下限電圧を含む一定電圧幅範囲に設定され、前記制御装置が、前記取得した前記電池の電圧情報が当該一定電圧幅範囲の動作可能下限電圧に入ったときには、前記補助電池の電源を当該制御装置自身に給電し、前記車両の現在位置情報を有線又は近距離無線によって直接前記携帯端末に送信するようにしている。
【0013】
同一車種の車両であっても、モータが回転できる下限電圧には、車両個々に若干のばらつきがあり、そこで、動作可能下限電圧に一定電圧幅範囲をもたせた上記請求項3の発明によれば、いずれの車両においても実使用上問題のない動作可能下限電圧を設定できる。
【0014】
請求項4の発明においては、前記請求項2又は3に記載の電気自動車の緊急通知システムにおいて、さらに、前記モータの停止を監視するモータ停止監視手段を備え、前記制御装置が、前記取得した前記電池の電圧情報が前記動作可能下限電圧となったときには、前記補助電池の電源を当該制御装置自身に給電し、前記モータ停止監視手段がモータの停止を判断したときに前記車両の現在位置情報を有線又は近距離無線によって直接前記携帯端末に送信するようにしている。
【0015】
これによれば、モータが停止したときに携帯端末への現在位置情報の送信を行うから、車両の実際の停止位置と、携帯端末へ送信された現在位置情報での車両位置とのずれが殆ど無くなる。
【0016】
又、請求項5の発明においては、前記請求項2又は3に記載の電気自動車の緊急通知システムにおいて、さらに、車両が停止したか否かを車輪の回転から判断する車両停止判断手段を備え、前記制御装置が、前記取得した前記電池の電圧情報が前記動作可能下限電圧となったときには、前記補助電池の電源を当該制御装置自身に給電し、前記車両停止判断手段が車両停止を判断したときに前記車両の現在位置情報を有線又は近距離無線によって直接前記携帯端末に送信するようにしている。
【0017】
これによれば、実際に車両が停止した位置で、当該位置の車両の現在位置情報を送信するから、車両の実際の停止位置と、携帯端末へ送信された現在位置情報での車両位置とのずれが全く無くなる。
【0018】
又、請求項6の発明においては、前記請求項2を引用する請求項4に記載の電気自動車の緊急通知システムにおいて、前記取得した前記電池の電圧情報が前記動作可能下限電圧となったときには、前記モータ停止検出信号を取得したときに前記補助電池の電源を当該制御装置自身に給電し、前記車両の現在位置情報を有線又は近距離無線によって直接前記携帯端末に送信するようにしている。
【0019】
これによれば、電池の電圧が動作可能下限電圧となってから、さらにモータ停止検出信号を取得したときに、前記補助電池の電源を当該制御装置自身に給電するから、補助電池が担う電圧をさらに小さくできる。つまり、前記電池の残量容量が減少してゆくと、その減少する電圧はまず動作可能下限電圧を通過した後、モータが実際に停止する電圧を通過することになる。この場合、前記電池の電圧がモータが実際に停止する電圧となったところで、前記制御装置の電源として前記補助電池を使用開始すると、この使用開始時点での電圧を補助電池で保障すれば良いから、補助電池の使用開始時点を、電圧情報が前記動作可能下限電圧となった時点とする場合に比して、補助電池が担う電圧つまり定格電圧を小さくすることができる。この結果、補助電池の小型化を図り得、ひいては装置全体の大型化、複雑化及び重厚化を回避できる。
【0020】
又、請求項7の発明においては、前記請求項2を引用する請求項5に記載の電気自動車の緊急通知システムにおいて、前記取得した前記電池の電圧情報が前記動作可能下限電圧となったときには、前記車両停止判断手段が車両停止を判断したときに前記補助電池の電源を当該制御装置自身に給電し、前記車両の現在位置情報を有線又は近距離無線によって直接前記携帯端末に送信するようにしている。
【0021】
これによれば、補助電池が担う電圧をさらに小さくできる。すなわち、前記電池の残量容量が減少してゆくと、その減少する電圧は、まず動作可能下限電圧を通過した後、モータが実際に停止する電圧を通過することになる。この場合、モータが停止してから、車両が停止するまで、タイムラグが考えられるから、車両が停止したことが検出されたときにはさらに電池の電圧が低下している。そして、この車両停止が検出されたところで、前記制御装置の電源として前記補助電池を使用開始すると、この使用開始時点での電圧を補助電池で保障すれば良いから、補助電池の使用開始時点を、電圧情報が前記モータ停止時の電圧となった時点とする場合に比して、補助電池が担う電圧つまり定格電圧を小さくすることができる。この結果、補助電池のさらなる小型化を図り得、ひいては装置全体の大型化及び複雑化並びに重厚化の防止に一層効果的である。
【図面の簡単な説明】
【0022】
【図1】本発明の第1実施形態を示すブロック図
【図2】ナビゲーションシステムを示す電気的構成のブロック図
【図3】制御装置の制御内容を示すフローチャート
【図4】本発明の第2実施形態を示す図1相当図
【図5】図2相当図
【図6】図3相当図
【図7】本発明の第3実施形態を示す図3相当図
【図8】本発明の第4実施形態を示す図3相当図
【図9】本発明の第5実施形態を示す図3相当図
【図10】本発明の第6実施形態を示す図3相当図
【発明を実施するための形態】
【0023】
以下、本発明の第1実施形態について図面を参照しながら説明する。
図1は、本発明における電気自動車の緊急通知システムの全体構成を概略的に示している。本発明に係る電気自動車の緊急通知システムは、車両1を駆動させるモータ2と、GPS(Global Positioning System)用人工衛星3からGPS信号を受けて自車の車両位置の検出が可能なナビゲーションシステム4と、モータ2及びナビゲーションシステム4に電力を供給する例えば二次電池からなる電池5と、この電池5の電圧を監視及び管理する電池監視装置たる電池管理ECU(Electronic Control Unit)6とから構成されている。このナビゲーションシステム4は、後述する制御装置9を含んで構成されており、携帯端末7(例えば、ドライバーが所有する携帯電話)と、例えばUSBによる有線接続やBluetooth(登録商標)による近距離無線によって後述する送受信部17を介して通信可能に接続される。
【0024】
前記ナビゲーションシステム4は、図2に示すように、そのナビゲーション動作を制御する機能を有した制御装置9に、位置検出器10、地図データベース11、表示装置12、操作スイッチ群13、音声出力装置14、リモコンセンサ15、外部メモリ16、送受信部17などを接続して構成されている。
【0025】
制御装置9は、CPU、ROM、RAM、I/Oインタフェース及びこれらを接続するバスラインなど(何れも図示せず)を備えたマイクロコンピュータにより構成されている。この制御装置9は電池管理ECU6に接続されていて、電池管理ECU6から送信される電池5の電圧情報をもとに、定期的に電池5の残量を確認している。
【0026】
位置検出器10は、GPS受信機18、ジャイロセンサ19、車両の加速度を検出する加速度センサ20などの位置検出要素から構成されている。位置検出器10は、上記各位置検出要素の検出信号を補間しながら高精度に車両の位置を検出するようになっている。なお、要求される検出精度によってはこれらの一部のみで構成してもよいし、さらに、車両の速度を検出する車速センサなどを加えてもよい。
【0027】
地図データベース11は、CD−ROM、DVD−ROM、或いはハードディスク、不揮発性の半導体メモリなどのような大容量の情報記録媒体を利用して構成されたものであり、地図表示のための地図描画用データ、マップマッチング、経路探索、経路案内などの種々の処理に必要な道路データ、交差点の詳細データから成る交差点データ、背景レイヤのための背景データ、地名などを表示するための地名データの他に、住宅街、住宅が疎らな区域、工業地区、施設情報(病院とか、公園、店舗)などのデータベース、電話番号と施設の対応を示す電話番号データベースなど、多様な地図データが記憶されている。
【0028】
表示装置12は、経路案内などのための表示装置であり、車両1の運転席近傍に設置される。
操作スイッチ群13は、表示装置12の周辺に配置されたメカニカルスイッチや当該表示装置12のディスプレイ上に形成されたタッチパネルスイッチなどから成り、各種のデータや設定事項などの操作に係るコマンドを制御装置9に与えるために設けられている。
【0029】
音声出力装置14は、経路案内に関連した音声ガイドを行うためのものであり、音声合成回路、アンプ、スピーカなどを備えたものである。
リモコンセンサ15は、リモコン21からの操作信号を受信して制御装置9に与える構成となっている。
【0030】
外部メモリ16は、フラッシュメモリなどのデータ書き換え可能な不揮発性メモリより構成されたもので、例えば他の規格の情報記録媒体に対応するためのプログラムソフトを記憶したり、特定データ(走行軌跡の履歴やデジタルカメラにより取り込んだ任意の画像データなど)の保存や呼出などを行ったりするために設けられている。
【0031】
次に、上記した構成の作用について、図3も参照して説明する。
まず、車両1の主電源が投入されると、電池5からモータ2及びナビゲーションシステム4へ電力が供給されて、これらモータ2及びナビゲーションシステム4が始動する。するとナビゲーションシステム4内の制御装置9は、電池管理ECU6から電池5の電圧情報を取得する(ステップS1)。次に、制御装置9は、ステップS1で取得した電池5の電圧情報と、予め設定されたモータ2及びナビゲーションシステム4の動作が可能な下限値である動作可能下限電圧とを比較する(ステップS2)。このとき、取得した電池5の電圧情報が動作可能下限電圧を上回っていれば(ステップS2でNOの場合)ステップS1へ戻る。通常、電池切れなどが生じていなければステップS1及びステップS2を繰り返して、モータ2の駆動及びナビゲーションシステム4の動作が連続的に行われる。
【0032】
ちなみに、実際の使用においては、モータ2の動作が可能な下限電圧とナビゲーションシステム4の動作が可能な下限電圧とが異なる場合も考えられるが、通常モータ2の動作可能下限電圧がナビゲーションシステム4の動作可能下限電圧より大であるから、この場合はモータ2の下限電圧を下限とした範囲内で前記動作可能下限電圧を設定すれば良い。
【0033】
次に、電池5の電圧が低下して、ステップS1において取得した電池5の電圧情報が、ステップS2で動作可能下限電圧となった場合(ステップS2でYESの場合)には、制御装置9は、電池5の電圧が低下してあと一定時間でモータ2及びナビゲーションシステム4が停止すると判断する。このとき制御装置9は、位置検出器10から自車の現在位置情報を取得すると共に地図データベース11の地図情報も取得する(ステップS3)。
【0034】
なお、実際には前記電池5の電圧情報は経時的に変化していくことから、予め設定する動作可能下限電圧に一定の幅を持たせて、その幅の範囲内に取得した電池5の電圧情報が入ったと判断されたときに、ステップS2からステップS3への移行が行われる。このため、ステップS2からステップS3へ移行したときの電池5の電圧は、継続してモータ2を駆動させることは困難であるが、携帯端末7と制御装置9との短時間の通信であれば可能な程度に残されている。
【0035】
そして、制御装置9は有線又は近距離無線で接続されている携帯端末7に直接現在位置情報(住所情報、座標情報など)を送信する(ステップS4)。
ステップS4で現在位置情報を送信後、モータ2及びナビゲーションシステム4は、電池5の電池切れによって停止される。このとき、ドライバーはロードサービス8(図1参照)へ救助要請をするに際し、制御装置9から携帯端末7へ送信された車両の現在位置情報をもとに、救助要請に必要な車両の現住所を正確に伝えることができる。
【0036】
このような本実施形態においては、次の様な作用効果を得ることができる。
本実施形態の構成によれば、車両1を駆動させるモータ2と、車両1の現在位置情報の取得が可能な制御装置9を含むナビゲーションシステム4とに電力を供給する電池5の電圧が、電池管理ECU6により監視され、前記制御装置9は前記電池管理ECU6と接続されて前記電池5の電圧情報を取得し、この取得した前記電池5の電圧情報が前記モータ2及び前記制御装置9を含むナビゲーションシステム4の動作可能下限電圧となったときには、取得した車両1の現在位置情報が有線又は近距離無線によって直接携帯端末7に送信される。この結果、電池切れが生じてモータ2及びナビゲーションシステム4が停止してしまった場合でも、これらが停止する直前に携帯端末7に車両1の現在位置情報が送信されているため、ドライバーは車両1の停止後の救助要請に備えて必要な情報を得ることができる。
【0037】
また、制御装置9はサーバなどを介さずに直接車両1の位置情報を携帯端末7に送信するため、サーバなどの設置や管理コストがかかることなく、低コストに構成することができる。さらに、携帯端末7はサーバなどと通信する必要がないため、トンネル内などの電波状況が悪い場合であっても、確実に車両1の現在位置情報を取得することができる。
【0038】
さらに、電池5の電圧が動作可能下限電圧となった場合、即ち、電池切れによってモータ2及びナビゲーションシステム4が停止してしまう直前に、車両1の現在位置情報が制御装置9から携帯端末7へ送信される。このため、ドライバーは車両1が電池切れによって停止する直前の現在位置情報を取得することができる。これにより、携帯端末7に車両1の現在位置情報を送信した後、さらにドライバーが車両1を動かしてしまい、携帯端末7に送信された車両1の現在位置情報と、実際の車両1の現在位置情報とが相違してしまう虞もない。従って、ドライバーは正確な自車の現在地情報を救助依頼先に伝えることができる。
【0039】
次に本発明の第2実施形態について図4ないし図6を参照して説明する。上記第1実施形態と同一構成又は同一機能部分には同一符号を付して、主に異なる部分について説明する。この第2実施形態では、例えば一次電池からなる補助電池31をさらに備えている。この補助電池31は制御装置9の補助電源用であり、この場合この制御装置9を含むナビゲーションシステム4全体の補助電源も共用する。この補助電池31には補助電源投入手段としての例えばリレースイッチからなる補助電源投入スイッチ32が備えられており、この補助電源投入スイッチ32は例えば常開形(常時オフ)であり、前記制御装置9がこの補助電池用切替スイッチ32を閉路(オン)制御し得るようになっている。
【0040】
前記制御装置9の制御内容について図6を参照して説明する。この図6においては、ステップSaが前記第1実施形態の図4とは異なる。すなわち、ステップS2において、取得した電圧情報が動作可能下限電圧となったことが判断されると(ステップS2の「YES」)、ステップSaに移行して補助電源投入スイッチ32をオンさせて、当該制御装置9自身に補助電池31の電源を供給(給電)する。この後、第1実施形態同様、位置検出器10から自車の現在位置情報を取得すると共に地図データベース11の地図情報も取得し(ステップS3)、携帯端末7に直接現在位置情報(住所情報、座標情報など)を送信する(ステップS4)。
【0041】
この第2実施形態によれば、主電源である電池5が動作可能下限電圧となった以後の制御装置9の電源を補助電源である補助電池31により担保でき、制御装置9による携帯端末7への現在位置情報の送信動作を保障できる。なお、前記補助電源投入手段としてはリレースイッチからなる前記補助電源投入スイッチ32に限られるものではない。
【0042】
なお、この第2実施形態において、前記動作可能下限電圧を、前記モータが回転できる下限電圧を含む一定電圧幅範囲に設定しても良く、この場合、前記制御装置9を、前記取得した前記電池の電圧情報が当該一定電圧幅範囲の動作可能下限電圧に入ったときには、前記補助電池31から当該制御装置9自身に給電し、車両の現在位置情報を前記携帯端末7に送信するようにする。
【0043】
同一車種の車両であってもモータが回転できる下限電圧には、車両個々に若干のばらつきがあるが、上述のようにすることにより、いずれの車両においても実使用上問題のない動作可能下限電圧を設定できる。
【0044】
図7は本発明の第3実施形態に関連するフローチャートを示している。この第3実施形態について説明すると、制御装置9には図示はしないがモータ2の回転信号が入力されるようになっており、制御装置9はこの回転信号に基づいてモータ2の停止を監視するモータ停止監視手段としての機能も備えている。なお、このモータ停止監視手段は、制御装置9以外の別の回転検出装置などで構成しても良い。
【0045】
この第3実施形態においては、第2実施形態で示す図6とはステップSbを追加した点が異なる。すなわち、ステップS2で電圧情報が動作可能下限電圧となったときに、既述のステップSaで、補助電源投入スイッチ32をオンさせて制御装置9自身の電源として補助電池31の電源を供給(給電)し、そして、ステップSbで、モータ2が停止したか否かを判断し、モータ2の停止が判断されると、既述のように自車の現在位置情報を取得し(ステップS3)、携帯端末7に直接現在位置情報(住所情報、座標情報など)を送信する(ステップS4)。
【0046】
この第3実施形態によれば、モータ2が停止したときに携帯端末7への現在位置情報の送信を行うから、車両1の実際の停止位置と、携帯端末へ送信された現在位置情報での車両位置とのずれが殆ど無くなる。
さらにこの第3実施形態によれば、主電源である電池5が動作可能下限電圧となったことに引き続いて補助電源である補助電池31を投入するから、制御装置9の電源が一瞬たりとも切れることがなく、制御装置9の動作が正常に機能する。
【0047】
図8は本発明の第4実施形態に関連するフローチャートを示している。この第4実施形態について説明すると、制御装置9には図示はしないが車輪の回転信号が入力されるようになっており、制御装置9はこの回転信号の入力が無いか否かに基づいて車両1が停止したか否かを監視する車両停止判断手段としての機能も備えている。なお、この車両停止判断手段は、制御装置9以外の別の車両停止判断装置などで構成しても良い。
【0048】
この第4実施形態における図8は、前記第3実施形態の図7と次の点が異なる。すなわち、ステップS2で電圧情報が動作可能下限電圧となったときに、既述のステップSaで、補助電源投入スイッチ32をオンさせて制御装置9自身の電源として補助電池31の電源を供給(給電)し、そして、次のステップScで、車両1が停止したか否かを判断し、車両1の停止が判断されると、自車の現在位置情報を取得し(ステップS3)、携帯端末7に直接現在位置情報(住所情報、座標情報など)を送信する(ステップS4)。
【0049】
この第4実施形態によれば、車両1が実際に停止したときに携帯端末7への現在位置情報の送信を行うから、車両1の実際の停止位置と、携帯端末へ送信された現在位置情報での車両位置とのずれが全く無くなる。ちなみに、モータ2の回転停止を判断して現在位置情報を送信する場合だと、モータ2の回転停止から惰性で車輪が回転(つまり車両1が動作)するおそれがあって、実際の車両停止位置と、送信した現在位置情報とが極めて僅かにずれるおそれがあるが、この第4実施形態では、上述したように車両1の実際の停止に基づいて現在位置情報を送信するから両位置のずれは全く無い。
さらにこの第4実施形態によれば、上記第3実施形態と同様、主電源である電池5が動作可能下限電圧となったことに引き続いて補助電源である補助電池31を投入するから、制御装置9の電源が一瞬たりとも切れることがなく、制御装置9の動作が正常に機能する。
【0050】
又、図9は本発明の第5実施形態を示している。この実施形態においては次の点が図7の第3実施形態と異なる。すなわち、ステップS2で電圧情報が動作可能下限電圧となったときに、ステップSdで、モータ2が停止したか否かを判断し、モータ2の停止が判断されると、ステップSeで補助電源投入スイッチ32をオンさせて制御装置9自身の電源として補助電池31の電源を供給(給電)し、そして、自車の現在位置情報を取得し(ステップS3)、携帯端末7に現在位置情報を送信する(ステップS4)。
【0051】
この第5実施形態によれば、電池5の電圧が動作可能下限電圧となってから、さらにモータ2の停止が判断されたときに、前記補助電池31から当該制御装置9自身に給電するから、補助電池31が担う電圧をさらに小さくできる。詳述すると、前記電池5の残量容量が減少してゆくと、その減少する電圧はまず動作可能下限電圧を通過した後、モータ2が実際に停止する電圧を通過することになる。この場合、前記電池5の電圧がモータ2が実際に停止する電圧となったところで、前記制御装置9の電源として前記補助電池31を使用開始すると、この使用開始時点での電圧を補助電池31で保障すれば良いから、補助電池31の使用開始時点を、電圧情報が前記動作可能下限電圧となった時点とする場合に比して、補助電池31が担う電圧つまり定格電圧を小さくすることができる。この結果、補助電池31の小型化を図り得、ひいては装置全体の大型化、複雑化及び重厚化を回避できる。
【0052】
この場合、補助電池31は、緊急時のための予備的なものであり、一次電池が使用されることが多いから、できるだけ定格電圧が低くて体格も小さいものが要求されるが、この実施形態ではその要求を満足できるようになる。
【0053】
又、図10は本発明の第6実施形態を示しており、この実施形態においては次の点が図8の第4実施形態と異なる。すなわち、ステップS2で電圧情報が動作可能下限電圧となったときに、ステップSfで、車両1が停止したか否かを判断し、車両1の停止が判断されると、ステップSgで補助電源投入スイッチ32をオンさせて制御装置9自身の電源として補助電池31の電源を供給(給電)し、そして、自車の現在位置情報を取得し(ステップS3)、携帯端末7に現在位置情報を送信する(ステップS4)。
【0054】
この第6実施形態によれば、補助電池31が担う電圧をさらに小さくできる。これについて詳述する。前記電池5の残量容量が減少してゆくと、その減少する電圧は、前述したように、まず動作可能下限電圧を通過した後、モータ2が実際に停止する電圧を通過することになる。この場合、モータ2が停止してから、車両1が停止するまで、タイムラグが考えられるから、車両1が停止したことが検出されたときにはさらに電池5の電圧が低下している。
【0055】
ここで本実施形態によれば、この車両停止が検出されたところで、前記制御装置9の電源として前記補助電池31を使用開始するから、この使用開始時点での電圧を補助電池31で保障すれば良いから、補助電池31の使用開始時点を、電圧情報が前記モータ停止時の電圧となった時点とする場合に比して、補助電池31が担う電圧つまり定格電圧を小さくすることができる。この結果、補助電池31のさらなる小型化を図り得、ひいては装置全体の大型化及び複雑化並びに重厚化の防止に一層効果的である。
【0056】
なお、上記各実施形態では、制御装置9をナビゲーションシステム4に含む構成としたが、ナビゲーションシステム4とは別体の制御装置9を外付けに設ける構成としても良い。
また、制御装置9と携帯端末7との接続はUSBやBluetoothに限られず、制御装置9と携帯端末7とがサーバなどを介さずに直接情報通信が行える形態で接続されていれば良い。
さらに、携帯端末は前記携帯電話に限られず、有線又は近距離無線によって制御装置9と接続可能な機能を有するPDA(Personal Digital Assistant)などでも良い。
【符号の説明】
【0057】
図面中、1は車両、2はモータ、5は電池、6は電池管理ECU(電池監視装置、モータ停止監視手段、車両停止判断手段、)、7は携帯端末、9は制御装置、31は補助電池を示す。
【特許請求の範囲】
【請求項1】
車両を駆動させるモータと、
車両の現在位置情報の取得が可能で、且つ任意の携帯端末と有線又は近距離無線によって接続されて通信が可能な制御装置と、
前記モータ及び前記制御装置に電力を供給する電池と、
前記電池の電圧を監視する電池監視装置とを有し、
前記制御装置は、前記電池監視装置と接続されて前記電池の電圧情報を取得し、この取得した前記電池の電圧情報が動作可能下限電圧となったときには、取得した車両の現在位置情報を有線又は近距離無線によって直接前記携帯端末に送信することを特徴とする電気自動車の緊急通知システム。
【請求項2】
前記請求項1に記載の電気自動車の緊急通知システムにおいて、
さらに、前記制御装置用の補助電池を備え、
前記制御装置は、前記取得した前記電池の電圧情報が前記動作可能下限電圧となってから、前記補助電池の電源を当該制御装置自身に給電し、前記車両の現在位置情報を有線又は近距離無線によって直接前記携帯端末に送信することを特徴とする電気自動車の緊急通知システム。
【請求項3】
前記請求項2に記載の電気自動車の緊急通知システムにおいて、
前記動作可能下限電圧は、前記モータが回転できる下限電圧を含む一定電圧幅範囲に設定され、
前記制御装置は、前記取得した前記電池の電圧情報が当該一定電圧幅範囲の動作可能下限電圧に入ったときには、前記補助電池の電源を当該制御装置自身に給電し、前記車両の現在位置情報を有線又は近距離無線によって直接前記携帯端末に送信することを特徴とする電気自動車の緊急通知システム。
【請求項4】
前記請求項2又は3に記載の電気自動車の緊急通知システムにおいて、
さらに、前記モータの停止を監視するモータ停止監視手段を備え、
前記制御装置は、前記取得した前記電池の電圧情報が前記動作可能下限電圧となったときには、前記補助電池の電源を当該制御装置自身に給電し、前記モータ停止監視手段がモータの停止を判断したときに前記車両の現在位置情報を有線又は近距離無線によって直接前記携帯端末に送信することを特徴とする電気自動車の緊急通知システム。
【請求項5】
前記請求項2又は3に記載の電気自動車の緊急通知システムにおいて、
さらに、車両が停止したか否かを車輪の回転から判断する車両停止判断手段を備え、
前記制御装置は、前記取得した前記電池の電圧情報が前記動作可能下限電圧となったときには、前記補助電池の電源を当該制御装置自身に給電し、前記車両停止判断手段が車両停止を判断したときに前記車両の現在位置情報を有線又は近距離無線によって直接前記携帯端末に送信することを特徴とする電気自動車の緊急通知システム。
【請求項6】
前記請求項2を引用する請求項4に記載の電気自動車の緊急通知システムにおいて、前記取得した前記電池の電圧情報が前記動作可能下限電圧となったときには、前記モータ停止検出信号を取得したときに前記補助電池の電源を当該制御装置自身に給電し、前記車両の現在位置情報を有線又は近距離無線によって直接前記携帯端末に送信することを特徴とする電気自動車の緊急通知システム。
【請求項7】
前記請求項2を引用する請求項5に記載の電気自動車の緊急通知システムにおいて、前記取得した前記電池の電圧情報が前記動作可能下限電圧となったときには、前記車両停止判断手段が車両停止を判断したときに前記補助電池の電源を当該制御装置自身に給電し、前記車両の現在位置情報を有線又は近距離無線によって直接前記携帯端末に送信することを特徴とする電気自動車の緊急通知システム。
【請求項1】
車両を駆動させるモータと、
車両の現在位置情報の取得が可能で、且つ任意の携帯端末と有線又は近距離無線によって接続されて通信が可能な制御装置と、
前記モータ及び前記制御装置に電力を供給する電池と、
前記電池の電圧を監視する電池監視装置とを有し、
前記制御装置は、前記電池監視装置と接続されて前記電池の電圧情報を取得し、この取得した前記電池の電圧情報が動作可能下限電圧となったときには、取得した車両の現在位置情報を有線又は近距離無線によって直接前記携帯端末に送信することを特徴とする電気自動車の緊急通知システム。
【請求項2】
前記請求項1に記載の電気自動車の緊急通知システムにおいて、
さらに、前記制御装置用の補助電池を備え、
前記制御装置は、前記取得した前記電池の電圧情報が前記動作可能下限電圧となってから、前記補助電池の電源を当該制御装置自身に給電し、前記車両の現在位置情報を有線又は近距離無線によって直接前記携帯端末に送信することを特徴とする電気自動車の緊急通知システム。
【請求項3】
前記請求項2に記載の電気自動車の緊急通知システムにおいて、
前記動作可能下限電圧は、前記モータが回転できる下限電圧を含む一定電圧幅範囲に設定され、
前記制御装置は、前記取得した前記電池の電圧情報が当該一定電圧幅範囲の動作可能下限電圧に入ったときには、前記補助電池の電源を当該制御装置自身に給電し、前記車両の現在位置情報を有線又は近距離無線によって直接前記携帯端末に送信することを特徴とする電気自動車の緊急通知システム。
【請求項4】
前記請求項2又は3に記載の電気自動車の緊急通知システムにおいて、
さらに、前記モータの停止を監視するモータ停止監視手段を備え、
前記制御装置は、前記取得した前記電池の電圧情報が前記動作可能下限電圧となったときには、前記補助電池の電源を当該制御装置自身に給電し、前記モータ停止監視手段がモータの停止を判断したときに前記車両の現在位置情報を有線又は近距離無線によって直接前記携帯端末に送信することを特徴とする電気自動車の緊急通知システム。
【請求項5】
前記請求項2又は3に記載の電気自動車の緊急通知システムにおいて、
さらに、車両が停止したか否かを車輪の回転から判断する車両停止判断手段を備え、
前記制御装置は、前記取得した前記電池の電圧情報が前記動作可能下限電圧となったときには、前記補助電池の電源を当該制御装置自身に給電し、前記車両停止判断手段が車両停止を判断したときに前記車両の現在位置情報を有線又は近距離無線によって直接前記携帯端末に送信することを特徴とする電気自動車の緊急通知システム。
【請求項6】
前記請求項2を引用する請求項4に記載の電気自動車の緊急通知システムにおいて、前記取得した前記電池の電圧情報が前記動作可能下限電圧となったときには、前記モータ停止検出信号を取得したときに前記補助電池の電源を当該制御装置自身に給電し、前記車両の現在位置情報を有線又は近距離無線によって直接前記携帯端末に送信することを特徴とする電気自動車の緊急通知システム。
【請求項7】
前記請求項2を引用する請求項5に記載の電気自動車の緊急通知システムにおいて、前記取得した前記電池の電圧情報が前記動作可能下限電圧となったときには、前記車両停止判断手段が車両停止を判断したときに前記補助電池の電源を当該制御装置自身に給電し、前記車両の現在位置情報を有線又は近距離無線によって直接前記携帯端末に送信することを特徴とする電気自動車の緊急通知システム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2011−188727(P2011−188727A)
【公開日】平成23年9月22日(2011.9.22)
【国際特許分類】
【出願番号】特願2010−158693(P2010−158693)
【出願日】平成22年7月13日(2010.7.13)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
【公開日】平成23年9月22日(2011.9.22)
【国際特許分類】
【出願日】平成22年7月13日(2010.7.13)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
[ Back to top ]