
電気自動車用目的地設定支援機能付ナビゲーション装置
【課題】車両に搭載したバッテリの電力で走行する電気自動車において、目的地を設定する際には、目的地に到着してから充電スタンドに走行できるか否かを判別し、走行できないときには目的地が適切ではないことを警告する「電気自動車用目的地設定支援機能付ナビゲーション装置」とする。
【解決手段】現在地から目的地に至る誘導経路を演算し、途中の充電スタンドで充電しながら目的地に至る経路が演算できたとき、目的地に最も近接する充電スタンドを検出し、現在地または目的地に至るために最後に充電を行う最終電気自動車充電スタンドから目的地迄の距離L2と、目的地から目的地最近接充電スタンド迄の距離L3との合計距離を算出する。その合計距離がこの電気自動車の満充電時の走行可能距離L1より大きい(L1<L2+L3)とき、目的地が適切ではないことを警告出力する。
【解決手段】現在地から目的地に至る誘導経路を演算し、途中の充電スタンドで充電しながら目的地に至る経路が演算できたとき、目的地に最も近接する充電スタンドを検出し、現在地または目的地に至るために最後に充電を行う最終電気自動車充電スタンドから目的地迄の距離L2と、目的地から目的地最近接充電スタンド迄の距離L3との合計距離を算出する。その合計距離がこの電気自動車の満充電時の走行可能距離L1より大きい(L1<L2+L3)とき、目的地が適切ではないことを警告出力する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、モータを駆動源として走行する電気自動車(EV)に用いるナビゲーション装置において、設定しようとする目的地ではその目的地に到着した後、残存電力量で電気自動車充電スタンド(EVST)迄走行できなくなることを警告できるようにした電気自動車用目的地設定支援機能付ナビゲーション装置に関する。
【背景技術】
【0002】
近年の環境問題、脱石油の課題等のために、モータを駆動源として走行する電気自動車(EV)が普及しようとしている。しかしながら、このような電気自動車は、従来から用いられているガソリン車やディーゼル車用のガソリンスタンドと比較して、電気自動車のバッテリを充電するEVスタンド(EVST)は極めて少なく、この点が電気自動車の普及を妨げる大きな要因となっている。
【0003】
そのためこのような電気自動車は、最初は比較的狭い範囲に電気自動車用の充電スタンドをできる限り高密度で設置し、その範囲で特に電気自動車を普及させ、次第にその範囲を広げると共に、そのような拠点を全国に展開することが検討されている。また、電気自動車は1回の充電で100km程度は走行できるため、比較的長距離のドライブにも用いられるようになる。そのため、主要道路のガソリンスタンド等にも充電設備を設置すると共に、大型商業施設等にも設置し、電気自動車の全国的な普及を目指している。
【0004】
一方、従来より広く普及しているナビゲーション装置においては、利用者が任意に設定した経由地を通り、目的地に至る誘導経路を演算し、その誘導経路に従って安全に且つ確実に目的地まで走行ができるように案内を行っている。
【0005】
即ち、従来から用いられているナビゲーション装置においては、地図を描画するための地図データ及び施設等を検索するための施設情報データを記録したDVD−ROM、ハードディスク、メモリカード等の地図・情報記録媒体と、この地図・情報記録媒体のデータを読み取る再生装置と、地図等を表示するモニタと、GPS受信機等により車両の現在位置及び進行方向の方位を検出する車両位置検出装置を備え、車両の現在位置を含む地図データを地図・情報記録媒体から読出し、この地図データに基づいて車両位置の周囲の地図画像をディスプレイ装置の画面に描画すると共に、車両位置マークを重ね合わせて表示し、車両の移動に応じて地図画像をスクロール表示し、或いは地図画像を画面に固定し車両位置マークを移動させ、車両が現在どこを走行しているのかを一目でわかるようにしている。
【0006】
前記のような地図・情報記録装置に記録されている地図データは、各種の縮尺レベルに応じて適当な大きさの経度幅及び緯度幅に区切られており、道路等は経度及び緯度で表現されたノードの座標集合として記録されている。道路は2以上のノードの連結からなり、地図データは、道路リスト、ノードテーブル及び交差点構成ノードリスト等からなる道路レイヤ、及び地図画面上に道路、建築物、施設、公園及び河川等を表示するための背景レイヤ等の地図データと、市町村名などの行政区画名、道路名、交差点名及び施設の名前等の、文字や地図記号等を表示するための情報データなどから構成される。
【0007】
また、このナビゲーション装置においては、利用者が所望の目的地に向けて道路を間違うことなく容易に走行できるようにするための経路誘導機能を備えている。この経路誘導機能によれば、住所、電話番号、地図のスクロール、近くのランドマーク等を用いる種々の手段により目的地や経由地を設定し、出発地から目的地まで、これらの地点を結ぶ経路の内各種の条件を加味して適切な経路を演算して提示するようになっている。また、利用者が選択した経路を誘導経路として記憶しておき、走行中、地図画像上に誘導経路を他の経路とは色を変えて太く描画して画面表示したり、車両が誘導経路上の進路を変更すべき交差点に一定距離以内に近づいたときに、交差点を拡大表示し、進路を変更すべき方向を示す矢印等を描画して画面表示したり、音声で右左折の誘導を行うことで、利用者を目的地まで案内することができるようにしている。
【0008】
ナビゲーション装置は上記のように、現在位置を正確に検出し、その現在位置に対応した地図をモニタに表示すると共に現在位置を重ねて表示することを基本的な作動としており、したがって現在走行している地点が全体としてどのような位置に存在するのか、また、現在位置の周辺の道路はどのようになっていて、周囲にはどのようなものが有るか、を容易に知ることが必要となる。このナビゲーション装置において誘導経路を走行しているときには、車両を現在位置から目的地まで迷うことなく安全に走行できるように、予め設定した誘導経路に従って、右左折交差点等の特定の案内地点において案内を行うため、画面を左右に2分割し、片側の画面には交差点の拡大図等の、案内を行う地点の拡大地図を表示し、他側の画面には周囲の通常の地図を表示する、等の画面表示も行っている。
【0009】
このようなナビゲーション装置を用いて目的地及び必要に応じて経由地を設定して走行する時、従来から用いられているガソリンエンジン、或いはディーゼルエンジン、更にはエンジンとモータで走行するハイブリッド車等(ガソリン車等と略称する)では、車両の走行が比較的多い道路には各所にガソリンスタンドが存在し、ガソリンが無くなりそうな時にはそのようなガソリンスタンドで給油することによってほとんど問題なく目的地まで走行し、また、以降の走行も問題なく行うことができる。
【0010】
それに対して前記のような電気自動車においては、電気自動車の駆動源であるモータに給電するバッテリへの充電を考慮して走行プランを作らなければならない。即ち、電気自動車においては駆動源のモータに対する電力供給源であるバッテリの電力が無くなると全く走行できなくなるため、現在のバッテリの残電力量で目的地に至ることができないと推測される時には、目的地までの充電スタンドを考慮した走行経路を検討する必要がある。
【0011】
そのため、例えば図8(a)に従来例として示すように、バッテリに満充電の時に例えば120km走行できる電気自動車(EV)が目的地に向けて走行する時、従来のガソリン車等では図中実線で示す経路aのように誘導経路が設定される場合でも、この経路aの必要走行距離が160kmである時には、満充電で通常は120km走行できるこの電気自動車では、目的地まで充電無しで走行することは危険である。
【0012】
したがって、電気自動車に搭載したナビゲーション装置では、例えば最短経路としての経路aにできる限り近接した電気自動車充電スタンド(EVST)を検索し、そこを経由地として設定し、その充電スタンドから目的地に至る誘導経路を演算する。その後前記充電スタンドで満充電したときに走行できる範囲を算出し、その範囲に目的地が存在しないときには、更に同様の処理によって次の充電スタンドを検索し、同様の処理を繰り返して目的地に到達できるとき、目的地への誘導経路として提示するようにしている。
【0013】
それにより図8(a)の例では、通常の誘導経路である経路aにできる限り近く、且つ走行開始時の満充電で走行できることになっている範囲の距離にできる限り近い充電スタンドを検索し、充電スタンドAが検索された例を示している。それにより現在地から充電スタンドAへの経路bが設定される。その後充電スタンドAで満充電するものと仮定し、そこから目的地までの距離は70kmであることを算出したときには、この電気自動車では充分走行可能範囲であるため、充電スタンドAから目的地への経路cは確定する。
【0014】
上記処理によって従来は図8(a)の破線で示すような誘導経路が設定され、これを利用者が確定することにより、以降はこのナビゲーション装置の通常の機能によって、現在地から充電スタンドAを経由して目的地迄、右左折交差点等を含め、安全に且つ確実に車両を目的地に案内することができるようにしている。
【0015】
なお、電気自動車のナビゲーション装置において、充電スタンドと次の充電スタンドとの距離が満充電時の走行可能距離を超える等、目的地まで走行可能な誘導経路が検索できなかった場合には、目的地まで到達不能である旨の警告を行う技術は特許文献1に開示されている。
【0016】
また、電気自動車のナビゲーション装置において、現在のバッテリの残電力量で目的地或いは充電スタンドまで到達できない場合、現在のバッテリ残電力量では目的地まで到達できない旨の表示を行い、最小充電時間を提示する技術は特許文献2に開示されている。
【先行技術文献】
【特許文献】
【0017】
【特許文献1】特開平10−170293号公報
【特許文献2】特開2003−294463号公報
【発明の概要】
【発明が解決しようとする課題】
【0018】
前記のように、電気自動車においては、目的地への誘導経路を演算するに際して、充電スタンドでの充電を考慮した誘導経路の設定は必須である。しかしながら、従来の技術では目的地に到達できればその誘導経路は適切なものとして取り扱われており、目的地に到達できてからの走行については考慮されていなかった。
【0019】
即ち、例えば前記図8(a)のようにして充電スタンドを考慮した目的地への誘導経路ができて走行を開始したとしても、例えば同図(b)に示すように、目的地から現在地に戻ってこようとするとき、或いは次の場所に走行しようとしたとき、目的地に到達したときのこの電気自動車の残電力量は、充電スタンドAで満充電した場合でも既に70km走行しており、残りの電力量では50km程度しか走行することができない。
【0020】
それに対して、目的地には充電設備を備えておらず、目的地に最も近い充電施設は、目的地から60km離れた場所にある充電スタンドBであったときには、目的地に到着した後次の場所に走行することはできなくなり、従来のガソリン車等のガス欠状態と同様に、充電のための車両等の出動を依頼せざるを得なくなる。
【0021】
この点について、前記従来技術としての特許文献1に開示された技術では、目的地に到着できたとしても、その後、戻ってくる途中にバッテリの電力を全て消費してしまった場合や、最寄りの充電スタンドに辿り着けない場合が発生する。また、特許文献2に開示された技術でも、バッテリの電力が全て消費してしまわない位置に充電スタンドが存在することを前提としており、前記問題点を解決することができないことは特許文献1と同様である。
【0022】
したがって本発明は、車両に搭載したバッテリの電力で走行する電気自動車において、目的地を設定する際には、目的地に到着してから次の走行ができるか否かを考慮して、目的地の設定が適切であるかを判定し、次の走行ができないことがわかったときには警告を発することができるようにした電気自動車用目的地設定支援機能付ナビゲーション装置を提供することを主たる目的とする。
【課題を解決するための手段】
【0023】
本発明に係る電気自動車用目的地設定支援機能付ナビゲーション装置は、前記課題を解決するため、目的地を設定する目的地設定手段と、現在地から目的地に至る誘導経路を演算する誘導経路演算手段と、目的地に最も近接している電気自動車充電スタンドを検出する目的地最近接充電スタンド検出手段と、前記誘導経路演算手段で目的地に至る経路が演算できたとき、現在地または目的地に至るために最後に充電を行う最終電気自動車充電スタンドから目的地を経由して、前記目的地最近接電気自動車充電スタンド検出手段で検出した電気自動車充電スタンドまでの距離より、当該電気自動車の満充電時の走行可能距離が短いか否かを判別する目的地最近接電気自動車充電スタンド走行可否判別手段と、前記目的地最近接電気自動車走行可否判別手段で目的地最近接電気自動車充電スタンドに到達できないと判別したとき、目的地に到達した後に走行不能となることの警告出力を行う目的地到達後走行不能警告出力手段とを備えたことを特徴とする。
【0024】
本発明に係る他の電気自動車用目的地設定支援機能付ナビゲーション装置は、前記電気自動車用目的地設定支援機能付ナビゲーション装置において、前記誘導経路演算手段で目的地に至る誘導経路が演算できたとき、更に目的地から目的地最近接電気自動車充電スタンドに走行するための電気自動車充電スタンドを選択する電気自動車充電スタンド選択手段を備え、前記電気自動車充電スタンド選択手段で、前記最終電気自動車充電スタンドで満充電して目的地を経由して目的地最近接電気自動車充電スタンドに走行することができる電気自動車充電スタンドが選択できないとき、前記目的地到達後走行不能警告出力手段が警告出力を行うことを特徴とする。
【0025】
本発明に係る他の電気自動車用目的地設定支援機能付ナビゲーション装置は、前記電気自動車用目的地設定支援機能付ナビゲーション装置において、前記電気自動車充電スタンド選択手段では、目的地最近接電気自動車充電スタンドが現在地または前記最終電気自動車充電スタンドとの間に存在するとき、当該目的地最近接電気自動車充電スタンドを最終電気自動車充電スタンドとして選択することを特徴とする。
【0026】
本発明に係る他の電気自動車用目的地設定支援機能付ナビゲーション装置は、前記電気自動車用目的地設定支援機能付ナビゲーション装置において、前記電気自動車充電スタンド選択手段で、目的地最近接電気自動車充電スタンドが現在地または前記最終電気自動車充電スタンドから目的地の遠方に存在するとき、現在地または前記最終電気自動車充電スタンドと目的地間に存在する電気自動車充電スタンドを最終電気自動車充電スタンドとして選択することを特徴とする。
【0027】
本発明に係る他の電気自動車用目的地設定支援機能付ナビゲーション装置は、前記電気自動車用目的地設定支援機能付ナビゲーション装置において、目的地に電気自動車充電スタンドを併設していることを検出する目的地併設電気自動車充電スタンド検出手段を備え、前記誘導経路演算部で目的地への経路が演算できたときにおいて、前記目的地併設電気自動車充電スタンド検出手段で目的地に電気自動車充電スタンドを併設していることを検出したときには、以降の前記目的地到達後走行不能警告出力のための処理を行わないことを特徴とする。
【発明の効果】
【0028】
本発明は上記のように構成したので、車両に搭載したバッテリの電力で走行する電気自動車において、目的地を設定する際には、目的地に到着してから次の走行ができるか否かを考慮して、目的地の設定が適切であるかを判定し、次の走行ができないことがわかったときには警告を発することができ、適切な目的地の設定を支援することができるようになる。
【図面の簡単な説明】
【0029】
【図1】本発明の実施例の機能ブロック図である。
【図2】同実施例の作動フロー図である。
【図3】同実施例の目的地設定時の作動態様を示す図である。
【図4】同実施例の目的地設定時の他の作動態様を示す図である。
【図5】同実施例の目的地設定時の更に他の作動態様を示す図である。
【図6】同実施例の目的地設定時の更に他の作動態様を示す図である。
【図7】同実施例の目的地設定時の更に他の作動態様を示す図である。
【図8】従来技術とその問題点を説明する図である。
【発明を実施するための形態】
【実施例】
【0030】
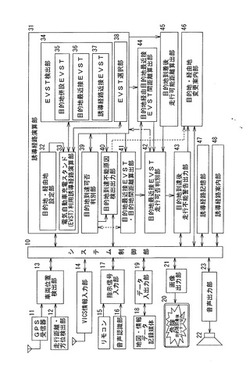
本発明の実施例を図面に沿って説明する。図1は本発明の実施例の機能ブロック図であり、本発明を各種の態様で実施することができるようにした機能ブロック図を示している。なお、同図において、各機能を行う機能部は、それぞれ各機能を行う手段ということができる。
【0031】
図1に示す実施例においては、従来から広く用いられているナビゲーション装置に対して、誘導経路の目的地を設定するに際して、目的地に到着した後に走行を継続することができるか否かを判断し、走行を継続できないと判断したときには警告を発することができるようにした各種の機能部を備えた例を示している。
【0032】
したがって、図1に示すナビゲーション装置においては、従来のナビゲーション装置と同様に、各種機能部を総合的に制御を行うソフトウエアをROMに記録し、CPUが適宜RAMを用いて演算を行って所望の作動を行うシステム制御部10を備え、このシステム制御部10に接続した各機能部によって、ナビゲーション装置としての所定の機能を行うことができるようにしている。
【0033】
このシステム制御部10に対して車両位置検出部13を接続し、GPS受信器11の位置データを入力するとともに、更に必要に応じて車速センサや角度センサによる走行距離・方位検出部12からの車両の移動データを入力することによって、車両の現在位置を正確に検出している。また、VICS情報入力部14では、FM電波やビーコン等を受信して交通情報を取り込み、特に渋滞情報を入力することができる。
【0034】
指示信号入力部17では、リモコン15により、或いは音声を認識して利用者の指示信号とし、更にはモニタ20のタッチパネル操作等によって各種の指示信号を入力可能としている。データ入出力部19においては、DVD−ROM、或いはハードディスク、メモリカード等の地図・情報データ記録媒体18から必要な地図データ、施設情報等を取り込み、更にそのデータ記録媒体がハードディスクやメモリカードのように容易にデータの書き込みができるような場合には、メモリカードやUSBメモリ等のデータを読み取って利用することができるように、この地図・情報データ記録媒体18に記録も可能としている。
【0035】
画像出力部21ではナビゲーション装置が利用者に対して案内する各種の画像をモニタ20に出力し、後述するような目的地設定時の警告の出力も行う。音声出力部23においては、ナビゲーション装置の音声出力として、誘導経路の重要な案内をスピーカ22から出力し、必要に応じて後述するような目的地設定時の警告の出力も行う。
【0036】
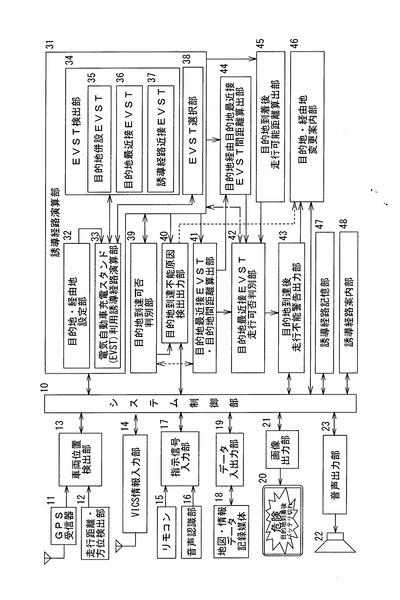
誘導経路演算部31では、目的地・経由地設定部32において、住所、電話番号、地図のスクロール、近くのランドマーク等を用いる種々の手段により目的地や経由地を設定する。電気自動車充電スタンド(EVST)利用誘導経路演算部33では、本発明が適用される電気自動車において、前記車両位置検出部13で検出した車両位置としての現在地から、前記目的地・経由地設定部32で設定した経由地を経て目的地に至る誘導経路を演算する。
【0037】
その際には、電気自動車にとって必須の充電スタンドを考慮して誘導経路を演算することとなり、現在地から目的地迄現在のバッテリの残電力量で走行できるときは、従来のガソリン車等のように誘導経路を演算することができるが、現在のバッテリの残電力量では目的地まで走行することができないことがわかったときには、できる限り通常の誘導経路に近く、且つ、現在の残電力量で走行できる範囲内でその範囲の限界に近い位置に存在する充電スタンドを検索し、そこから各経由地を経て目的地への誘導経路を更に演算する、という手法を継続することによって、目的地への誘導経路を演算することとなる。
【0038】
したがって、この電気自動車充電スタンド(EVST)利用誘導経路演算部33では、上記のような誘導経路の演算を行うため、充電スタンドの検出は重要な処理であり、そのため図示の例では電気自動車充電スタンド(EVST)検出部34を備え、各地点から前記のような条件を備えた場所に存在する充電スタンドを検出する。
【0039】
図示の例ではその中の目的地併設EVST35で、目的地・経由地設定部32で設定した目的地に電気自動車充電スタンドを併設しているか否かを検出する。また、目的地最近接EVST36では、目的地に最も近接している電気自動車充電スタンドを検出する。また、誘導経路近接EVST37では、目的地に至るまでの間に充電スタンドの利用が必要なとき、できる限り誘導経路に近接した場所に存在する充電スタンドを検出する。
【0040】
EVST選択部38では、特に電気自動車充電スタンド(EVST)利用誘導経路演算部33で誘導経路を演算するに際して、後述するように目的地最近接EVST36にできる限り走行可能となる充電スタンドを選択する。その選択に際しては、電気自動車充電スタンド(EVST)利用誘導経路演算部33との共同により適切な充電スタンドの選択を行う。
【0041】
目的地到達可否判別部39では、誘導経路演算部31で前記のようにして電気自動車充電スタンドを考慮した目的地に至る誘導経路を演算したとき、例えば途中で充電をしなければならなくなるのに対して走行可能な範囲の充電スタンドが存在しないことがわかる等により、目的地・経由地設定部32で設定した目的地及び経由地では走行できる経路は見つからず、誘導経路が演算できなかったときには、目的地に到達できない旨の出力を行う。
【0042】
図1の例では目的地到達不能原因検出出力部40を備え、前記目的地到達可否判別部39から目的地に到達することができない旨の出力があったとき、誘導経路演算部31の演算経過のデータにより、例えば出発後所定の経由地までは走行できたものの、次の経由地に到達できない、或いは各経由地は到達できたものの、目的地には到達できない等の案内を出力する。
【0043】
目的地最近接EVST・目的地間距離算出部41では、前記目的地到達可否判別部39で目的地に到達できる誘導経路が演算できたと判別したとき、前記電気自動車充電スタンド(EVST)検出部34の目的地併設設EVST35が検出されなかった場合に、目的地最近接EVST36の検出結果を用いて、その目的地最近接EVSTと、目的地間の距離(L3)を算出する。
【0044】
目的地経由目的地最近接EVST間距離算出部44では、現在地から目的地まで途中で充電スタンドを利用せずに到着できるときは、現在地から目的地を経由して目的地最近接EVST迄の距離を算出し、また、途中で充電スタンドを利用するときには、そこから目的地を経由して目的地最近接EVST迄の距離を算出する。
【0045】
目的地最近接EVST走行可否判別部42においては、現在地または最終充電スタンドで満充電であることを前提に、各地点からこの電気自動車で走行可能な距離と、目的地経由目的地最近接EVST間距離算出部44で算出した距離とを比較し、現在地または最終EVSTで満充電で走行しても、目的地を経由して目的地最近接EVSTに到達できないか否かを判別する。
【0046】
この目的地最近接EVST走行可否判別部42で前記走行ができないと判別したとき、即ち、目的地に到達できるものの、目的地に最も近い充電スタンド迄走行することができないと判別したときには、最初に誘導経路演算部31にその信号を出力する。誘導経路演算部31では、後述するようにEVST選択部38で特に最終充電スタンドの選択を行い、前記作動を繰り返して、どのような充電スタンドの選択を行っても目的地から目的地最近接EVSTに到達できないと判別したとき、目的地到達後走行不能警告出力部43にその信号を出力する。目的地到達後走行不能警告出力部43では、画像出力部21からモニタ20に対して警告表示を行い、音声出力部23を介してスピーカ22から目的地の設定が適切ではない旨の警告用音声案内を出力する。
【0047】
目的地・経由地変更案内部46では、主として目的地到達不能原因検出出力部40で、適切な充電スタンドが経路中に見つからない等によっていずれかの経由地、或いは目的地に到達できないときの原因を取り込み、利用者に対して経由地或いは目的地を変更する必要があること、及びその原因等を案内する。なお、目的地到達後走行不能警告出力部43では目的地に到達してもその後走行不能になる警告の出力のみを行うとき、この目的地経由地変更案内部46でその詳細な案内の出力を行うようにしても良い。この案内の出力により、利用者がその原因を詳細に検討することによって、適切な行楽施設等の経由地の変更、及びホテルが存在する位置等の目的地の変更の参考にすることができる。
【0048】
誘導経路記憶部47では通常のナビゲーション装置と同様に、誘導経路演算部31で適切な誘導経路が得られて利用者がこれを確認したときには、その誘導経路を記憶する。誘導経路案内部48では、地図画像上に誘導経路を他の道路とは色を変えて太く描画して画面表示したり、車両が誘導経路上の進路を変更すべき交差点に一定距離以内に近づいたときに、交差点を拡大表示し、進路を変更すべき方向を示す矢印等を描画して画面表示したり、音声で右左折の誘導を行うことで、利用者を目的地まで案内することができるようにしている。
【0049】
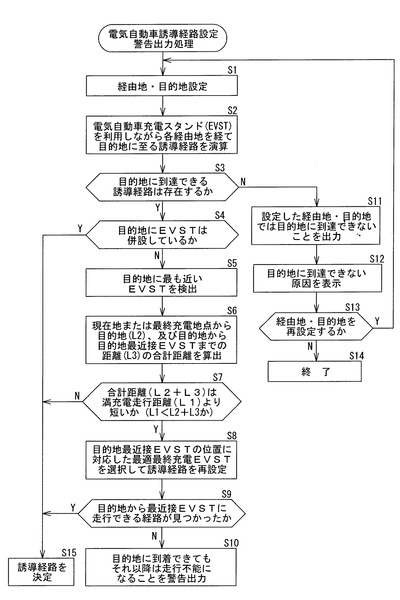
前記のような機能ブロックからなる本発明のナビゲーション装置においては、例えば図2に示す作動フローに従って順に作動させることにより実施することができる。即ち、図2に示す電気自動車誘導経路設定警告出力処理の例においては、最初経由地・目的地の設定を行うことから開始している(ステップS1)。ここでは経由地の設定は必ずしも必要ない。
【0050】
その後電気自動車充電スタンド(EVST)を利用しながら各経由地を経て目的地に至る誘導経路を演算する(ステップS2)。この演算に際しては、前記図1の誘導経路演算部31における、特に電気自動車充電スタンド(EVST)利用誘導経路演算部33の処理として述べたとおりの演算処理を行う。
【0051】
次いで、目的地に到達できる誘導経路は存在するか否かを判別する(ステップS3)。この処理は図1の目的地到達可否判別部39で、前記のように誘導経路演算部31での演算結果によって行っている。ステップS3において目的地に到達できる誘導経路は存在しないと判別したときには、ステップS11に進んで、設定した経由地或いは目的地では目的地に到達できないことを出力する。
【0052】
その後図2の例では目的地に到達できない原因について、特定の経由地或いは目的地に行くとき、バッテリ切れになる前に利用可能な充電スタンドがないため到達できない、等の案内表示を行う。この処理は図1の目的地・経由地変更案内部46で行っている。
【0053】
次いで経由地・目的地を再設定するか否かを判別し(ステップS13)、再設定すると判別したとき、即ち、利用者が「戻る」のキーを操作したときのような場合は再びステップS1に戻って、経由地・目的地の設定を行う。また、ステップS13においてこれ以上経由地・目的地の設定は行わないと判別したとき、即ち目的地設定終了キー等を押したときのような場合にはこの処理を終了する(ステップS14。
【0054】
ステップS3で目的地に到達できる誘導経路が存在したと判別したときにはステップS4に進み、目的地に電気自動車充電スタンド(EVST)が併設しているか否かを判別する。ここで目的地にEVSTが併設されていると判別したとき、即ち図1の誘導経路演算部31のEVST検出部34における目的地併設EVST検出部35で、目的地にEVSTを併設していることを検出したときには、目的地でこの電気自動車のバッテリを満充電することにより、少なくとも目的地に来た道を戻ることができるので、この誘導経路を決定する。
【0055】
それに対してステップS4で目的地にEVSTは併設していないと判別したときには、ステップS5に進んで、目的地に最も近いEVST、即ち目的地最近接EVSTを検出する。その後現在地または最終充電地点から目的地迄の距離(L2)、及び目的地から目的地最近接EVST迄の距離(L3)により、その合計距離(L2+L3)を算出する(ステップS6)。
【0056】
次いで、前記合計距離(L2+L3)はこの電気自動車の満充電したときに走行可能な距離(L1)より短いか否かを判別する(ステップS7)。ここで合計距離は満充電走行距離より短い、即ち、現在地または最終利用EVSTで満充電してあるときには、目的地を経由して目的地最近接EVSTに走行することができると判別したときには、この誘導経路を決定する(ステップS15)。
【0057】
それに対してステップS7で、合計距離は満充電走行距離より短くはないと判別したときには、図2の例においては後述するように、目的地最近接EVSTの位置に対応した最適最終充電EVSTを選択して誘導経路を再設定する(ステップS8)。その再設定の後、目的地から最近接EVSTに走行できる経路が見つかったか否かを判別し(ステップS9)、見つかったときにはステップS15に進んで再設定した誘導経路を決定する。
【0058】
ステップS9において目的地から最近接EVSTに走行できる経路が見つからなかったと判別したときには、ステップS10に進んで、目的地に到着できてもそれ以降は走行不能になることの警告出力を行う。
【0059】
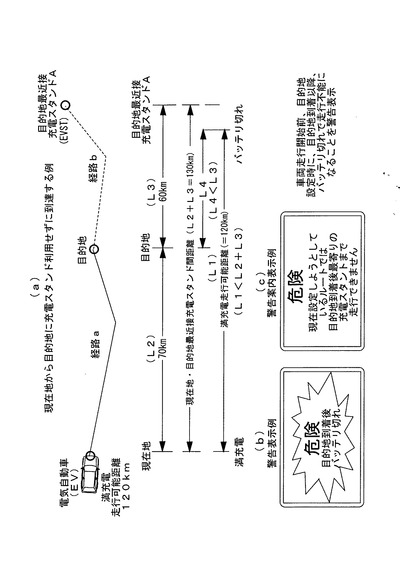
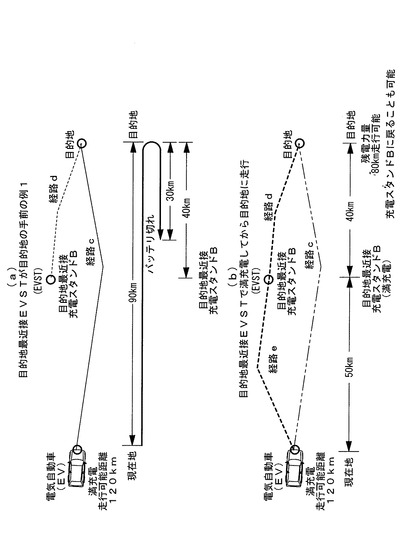
前記作動を本発明の最も単純化した態様である図3に基づいて説明する。図3の例においては現在地から目的地に電気自動車充電スタンド(EVST)を利用することなく走行できるときの例を示しており、但し、目的地には充電スタンドを併設していないときに、目的地到達以降は走行ができなくなることを検出したときに、警告を出力する例を示している。
【0060】
即ち図3の例においては、本発明の最も基本的な態様として、満充電時の走行可能距離が120kmの電気自動車(EV)が、満充電状態で現在地から目的地に行こうとするとき、ナビゲーション装置で目的地を設定することにより現在地から目的地までの経路とその距離を求めることができ、それにより現在地か目的地まで70kmあることが算出される。この距離は満充電により途中で充電を行う必要なく充分走行できる距離であり、それにより図2のステップS3では目的地に到達できる誘導経路は存在すると判別する。
【0061】
図3の例においては目的地にEVSTは併設していないので図2のステップS4において目的施設にEVSTは存在しないと判別し、ステップS5において目的地に最も近いEVSTを検索し、図示の例では目的地最近接充電スタンドAを検出した例を示している。その後ステップS6において、現在地から目的地、及び目的地から目的地最近接EVST迄の距離の合計距離を算出し、図示の例では現在地から目的地までの距離L2は70km、目的地から目的地最近接EVST迄の距離L3は60kmであり、したがってその合計距離は130kmである例を示している。
【0062】
その後ステップS7において、合計距離は満充電走行距離(L1)より短いか否かを判別し、図示の例ではL1が120kmで、L2+L3=130kmであるので、L1<L2+L3であり、ステップS8に進み、目的地最近接EVSTの位置に対応した最適最終充電EVSTを選択して誘導経路を再設定する。図示の例では現在地から目的地までEVSTは存在しないので最適EVSTも存在しない。
【0063】
図2の作動フローではその後ステップS8において目的地から目的地最近接EVSTに走行できる経路が見つかったか否かを判別し、図示の例では前記のように見つからないので、ステップS10に進んで目的地に到着できてもそれ以降は走行不能になることを警告出力することとなる。図3の例では同図(b)に示すように「危険 目的地到着後バッテリ切れ」の警告出力例を示し、同図(c)には「危険 現在設定しようとしているルートでは 目的地到着後最寄りの充電スタンドまで走行できません」の警告と案内を行った例を示している。
【0064】
このように、本発明においては、車両走行開始前の目的地設定時において、目的地に到着した後、バッテリ切れで走行不能になることを警告することができ、この目的地には行かない方が良いこと、更に必要なときには別の目的地に変更した方が良いことを利用者に知らせることができるようになる。
【0065】
前記図3の態様においては、目的地の最近接EVSTが現在地から見て、目的地より遠い位置にあるのに対して、図4の態様では目的地最近接EVSTが現在地側に存在する例、即ち現在地と目的地間に目的地最近接EVSTが存在する例を示している。図示の例では現在地から目的地まで最初の満充電状態で走行できるので、途中で充電することを考慮する必要がなかったものであるが、目的地に到着してから次の走行に際して、図4(a)に示すように、また前記図3の例と同様に、目的地から60km離れた場所に目的地最近接EVST(B)が存在するため、バッテリ切れとなってしまう。
【0066】
このような場合、本発明においては図2のステップS8において目的地最近接EVSTの位置に対応した最適最終充電EVSTを選択して誘導経路を再設定する。即ち、目的地最近接EVSTが目的地の手前側に存在することにより目的地に到着する前にこの充電スタンドで満充電することにより、ここから120km走行可能となり、目的地に到着してからでも、少なくとも(120km−40km=)80km走行できるため、この目的地最近接充電スタンドBに走行することができ、以降の走行を継続することができることがわかる。
【0067】
したがって本発明においては図3のステップS8で、目的地最近接EVSTの位置に対応した最適最終充電EVST(B)を選択して、図4(b)に示すように最初設定した最も適切された経路cから、少しは遠回りになっても目的地到達以降の走行を考慮して、経路eと経路dを通る誘導経路を再設定することとなる。
【0068】
このようにしてステップS9の判別では目的地から最近接EVSTに走行できる経路が見つかったと判別され、ステップS15で誘導経路をが決定される。そのためステップS10の警告出力は行われない。図4(b)に示すような誘導経路を設定して実際に走行するときには、前記のような演算結果を記憶しておき、目的地最近接充電スタンドBに接近したときには、目的地に到着後の走行を考慮してこの充電スタンドで満充電しておくことを忘れないような案内を行うことが好ましい。
【0069】
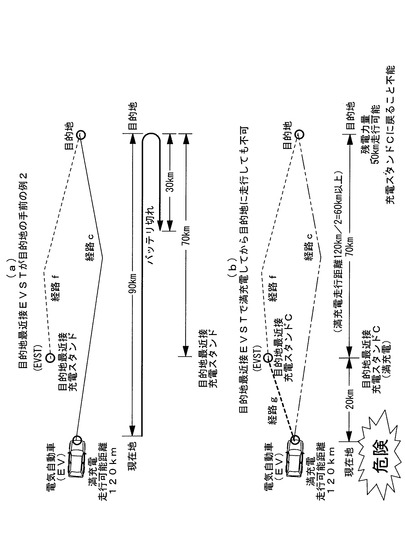
図4に示す例においては、目的地最近接EVSTが現在地と目的地との間に存在する時、その目的地最近接EVSTを利用することにより、目的地到着後にも以降の走行を行うことができるようになった例を示したが、例えば図5に示す例においては、目的地最近接EVSTが現在地と目的地との間に存在して、そこで満充電しても適切ではない例を示している。
【0070】
即ち、図5に示す例においては目的地最近接EVSTが目的地から現在地側で70kmの位置に存在するときの例を示しており、同図(a)の例では例えば最短経路として経路cが設定されて目的地に到着できる場合に、目的地最近接EVSTが目的地から70km離れた位置にあるため、目的地に到達できても以降の走行ができなくなっている状態を示している。
【0071】
このとき図2のステップS8で、目的地最近接EVSTの位置に対応した最適最終充電EVSTを選択しようとし、図5(b)の目的地最近接充電スタンドCで充電するように選択しようとして同図(b)に経路g、経路fを通る経路を設定しようとすると、それでは目的地に到着後の残電力量では50kmしか走行できないため、目的地最近接充電スタンドC迄走行できず、この時には図2のステップS9で目的地から最近接EVSTに走行できる経路が見つからなかったと判別して、ステップS10において前記のような警告出力を行うこととなる。
【0072】
その原因は、図示するように、目的最地近接EVSTが目的地と現在地の間に存在しても、目的地から目的地最近接EVST迄の距離が、この電気自動車の満充電時の走行可能距離である120kmの2分の1である60kmよりも大きいため、目的地に到着した後その充電スタンドに走行することができないことによる。このような処理を図2のステップS8、及びステップS9で行うこととなる。
【0073】
図6には目的地最近接EVSTが現在地から見て目的地より遠い位置に存在する、前記図3の例と同様の態様の例を示している。図6に示す例においては、現在地から目的地まで現在地の満充電によって走行でき、それにより経路hが得られた後、目的地最近接EVSTには図3と同様の理由により到達することができないと判別されている。
【0074】
この状態で図2のステップS8では前記のような誘導経路の再設定を試みた結果、図6(b)に示すように現在地と目的地の間に充電スタンドDが存在することが見つかった例を示している。即ち、図2のステップS3において通常の誘導経路の演算で図6の経路hによって最短経路等で到達することができることがわかった場合でも、その誘導経路では目的地から目的地最近接EVSTに辿り着けないことがわかったとき、ステップS8において充電スタンドを考慮した誘導経路を再設定する処理を行う。
【0075】
ここで現在地と目的地との間において目的地から50km手前に充電スタンドDが見つかった場合には、ここで満充電することにより、目的地迄走行しても70km走行できるため、目的地最近接EVSTである充電スタンドA迄走行することができる。従って、このような場合には図2のステップS10における警告は行わず、新たな経路を誘導経路として設定する。
【0076】
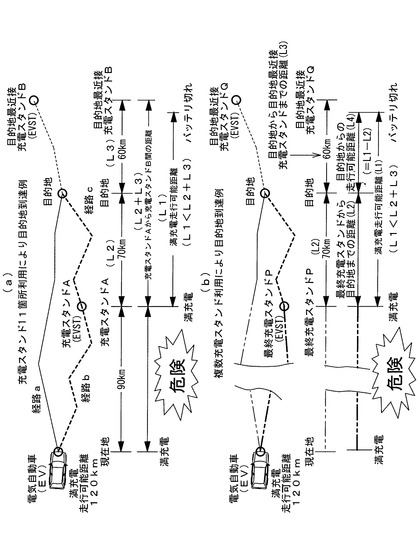
前記図3〜図6には本発明を単純化して説明するため、現在地から目的地まで充電しなくても走行可能なときの例を示したが、図7には途中で充電しなければ目的地に到達することができないときの例を示している。
【0077】
即ち図7に示す例においては前記図8(b)に示す従来例とその課題を示す図と同様の走行態様を示している。図7に示す例では満充電で走行可能な距離が120kmの電気自動車(EV)が、図示する現在地から目的地に走行しようとするとき、ガソリン車等の車両では経路aとして示す誘導経路が演算されるのに対して、その距離が160kmあるため、この電気自動車では途中で充電しなければ目的地に到達できないので、その誘導経路にできるだけ近い場所で、走行可能範囲の限界に比較的近い電気自動車充電スタンド(EVST)を検出する。
【0078】
その結果、現在地から90km先の充電スタンドAが見つかり、この充電スタンドAへの経路bが決定される。その後充電スタンドAで満充電したと仮定し、そこから目的地への経路を演算して経路cが求まったとき、その距離は70kmであることからその状態で目的地に走行することとなる。
【0079】
このような状態で目的地に到着した後、次に走行しようとすると、目的地に最も近い充電スタンドは充電スタンドBであり、そこまでの距離は60kmであったときには、目的地に到着した状態での残存電力量では50kmしか走行できないため、この充電スタンドBには到達することができない。この時には当然、先に充電した充電スタンドAにも走行することができない状態となっている。
【0080】
本発明ではその状態を図1の目的地最近接EVST走行可否判別部42で、目的地に最も近接している充電スタンドに走行できないことを検出している。それいにより、図3(b)及び(c)に示すような警告表示、及び音声による同様の警告出力を行う。このように、現在地から目的地迄の間に充電施スタンドを利用する場合においても、図3と同様の態様で本発明を実施することができ、図2の作動フローにおいてもステップS6の処理で最終充電地点から目的地までの距離をL2として演算することとなる。また、ステップS8の目的地最近接EVSTの位置に対応した最適最終充電EVSTを選択して誘導経路を再設定する処理も同様にして行うこととなる。
【0081】
図7(b)には更に、現在地から目的地までの距離が遠いことにより、複数の充電スタンドを利用して目的地に到達するときの例を示しており、ここでは目的地に最も近い最終充電スタンドPを利用した経路を示している。ここにおいても同図(a)と同様の処理によって本発明を実施することができることがわかる。また図2のステップS8の目的地最近接EVSTの位置に対応した最適最終充電EVSTを選択して誘導経路を再設定する処理も同様にして行うこととなる。
【0082】
なお、前記実施例では本発明における電気自動車が誘導経路に沿って走行するときの例を示したが、本発明は目的地に到着した後に次の走行ができなくなることにより、これから走行しようとしている場所には行かない方が良いという警告を出力するものであり、単にその情報を得て確認することができれば良いため、必ずしも誘導経路に沿って走行することは必要としない。
【0083】
また、前記実施例では車両に搭載したナビゲーション装置により所望の作動を行うようにした例を示したが、それ以外に携帯型ナビゲーション装置や、ナビゲーション機能付携帯電話を含め、各種のナビゲーション機能付携帯情報機器において、目的地に到着後走行できるか否かの判定用に有効に利用することができる。
【符号の説明】
【0084】
10 システム制御部
11 GPS受信器
12 走行距離・方位検出部
13 車両位置検出部
14 VICS情報入力部
15 リモコン
16 音声認識部
17 指示信号入力部
18 地図・情報データ記録媒体
19 データ入出力部
20 モニタ
21 画像出力部
22 スピーカ
23 音声出力部
31 誘導経路演算部
32 目的地・経由地設定部
33 電気自動車充電スタンド(EVST)利用誘導経路演算部
34 電気自動車充電スタント(EVST)検出部
35 目的地併設EVST
36 目的地最近接EVST
37 誘導経路近接EVST
38 EVST選択部
39 目的地到達可否判別部
40 目的地到達不能原因検出出力部
41 目的地最近接EVST・目的地間距離算出部
42 目的地最近接EVST走行可否判別部
43 目的地到達後走行不能警告出力部
44 現在地または最終利用EVST・目的地間距離算出部
45 目的地到達後走行可能距離算出部
46 目的地・経由地変更案内部
47 誘導経路記憶部
48 誘導経路案内部
【技術分野】
【0001】
本発明は、モータを駆動源として走行する電気自動車(EV)に用いるナビゲーション装置において、設定しようとする目的地ではその目的地に到着した後、残存電力量で電気自動車充電スタンド(EVST)迄走行できなくなることを警告できるようにした電気自動車用目的地設定支援機能付ナビゲーション装置に関する。
【背景技術】
【0002】
近年の環境問題、脱石油の課題等のために、モータを駆動源として走行する電気自動車(EV)が普及しようとしている。しかしながら、このような電気自動車は、従来から用いられているガソリン車やディーゼル車用のガソリンスタンドと比較して、電気自動車のバッテリを充電するEVスタンド(EVST)は極めて少なく、この点が電気自動車の普及を妨げる大きな要因となっている。
【0003】
そのためこのような電気自動車は、最初は比較的狭い範囲に電気自動車用の充電スタンドをできる限り高密度で設置し、その範囲で特に電気自動車を普及させ、次第にその範囲を広げると共に、そのような拠点を全国に展開することが検討されている。また、電気自動車は1回の充電で100km程度は走行できるため、比較的長距離のドライブにも用いられるようになる。そのため、主要道路のガソリンスタンド等にも充電設備を設置すると共に、大型商業施設等にも設置し、電気自動車の全国的な普及を目指している。
【0004】
一方、従来より広く普及しているナビゲーション装置においては、利用者が任意に設定した経由地を通り、目的地に至る誘導経路を演算し、その誘導経路に従って安全に且つ確実に目的地まで走行ができるように案内を行っている。
【0005】
即ち、従来から用いられているナビゲーション装置においては、地図を描画するための地図データ及び施設等を検索するための施設情報データを記録したDVD−ROM、ハードディスク、メモリカード等の地図・情報記録媒体と、この地図・情報記録媒体のデータを読み取る再生装置と、地図等を表示するモニタと、GPS受信機等により車両の現在位置及び進行方向の方位を検出する車両位置検出装置を備え、車両の現在位置を含む地図データを地図・情報記録媒体から読出し、この地図データに基づいて車両位置の周囲の地図画像をディスプレイ装置の画面に描画すると共に、車両位置マークを重ね合わせて表示し、車両の移動に応じて地図画像をスクロール表示し、或いは地図画像を画面に固定し車両位置マークを移動させ、車両が現在どこを走行しているのかを一目でわかるようにしている。
【0006】
前記のような地図・情報記録装置に記録されている地図データは、各種の縮尺レベルに応じて適当な大きさの経度幅及び緯度幅に区切られており、道路等は経度及び緯度で表現されたノードの座標集合として記録されている。道路は2以上のノードの連結からなり、地図データは、道路リスト、ノードテーブル及び交差点構成ノードリスト等からなる道路レイヤ、及び地図画面上に道路、建築物、施設、公園及び河川等を表示するための背景レイヤ等の地図データと、市町村名などの行政区画名、道路名、交差点名及び施設の名前等の、文字や地図記号等を表示するための情報データなどから構成される。
【0007】
また、このナビゲーション装置においては、利用者が所望の目的地に向けて道路を間違うことなく容易に走行できるようにするための経路誘導機能を備えている。この経路誘導機能によれば、住所、電話番号、地図のスクロール、近くのランドマーク等を用いる種々の手段により目的地や経由地を設定し、出発地から目的地まで、これらの地点を結ぶ経路の内各種の条件を加味して適切な経路を演算して提示するようになっている。また、利用者が選択した経路を誘導経路として記憶しておき、走行中、地図画像上に誘導経路を他の経路とは色を変えて太く描画して画面表示したり、車両が誘導経路上の進路を変更すべき交差点に一定距離以内に近づいたときに、交差点を拡大表示し、進路を変更すべき方向を示す矢印等を描画して画面表示したり、音声で右左折の誘導を行うことで、利用者を目的地まで案内することができるようにしている。
【0008】
ナビゲーション装置は上記のように、現在位置を正確に検出し、その現在位置に対応した地図をモニタに表示すると共に現在位置を重ねて表示することを基本的な作動としており、したがって現在走行している地点が全体としてどのような位置に存在するのか、また、現在位置の周辺の道路はどのようになっていて、周囲にはどのようなものが有るか、を容易に知ることが必要となる。このナビゲーション装置において誘導経路を走行しているときには、車両を現在位置から目的地まで迷うことなく安全に走行できるように、予め設定した誘導経路に従って、右左折交差点等の特定の案内地点において案内を行うため、画面を左右に2分割し、片側の画面には交差点の拡大図等の、案内を行う地点の拡大地図を表示し、他側の画面には周囲の通常の地図を表示する、等の画面表示も行っている。
【0009】
このようなナビゲーション装置を用いて目的地及び必要に応じて経由地を設定して走行する時、従来から用いられているガソリンエンジン、或いはディーゼルエンジン、更にはエンジンとモータで走行するハイブリッド車等(ガソリン車等と略称する)では、車両の走行が比較的多い道路には各所にガソリンスタンドが存在し、ガソリンが無くなりそうな時にはそのようなガソリンスタンドで給油することによってほとんど問題なく目的地まで走行し、また、以降の走行も問題なく行うことができる。
【0010】
それに対して前記のような電気自動車においては、電気自動車の駆動源であるモータに給電するバッテリへの充電を考慮して走行プランを作らなければならない。即ち、電気自動車においては駆動源のモータに対する電力供給源であるバッテリの電力が無くなると全く走行できなくなるため、現在のバッテリの残電力量で目的地に至ることができないと推測される時には、目的地までの充電スタンドを考慮した走行経路を検討する必要がある。
【0011】
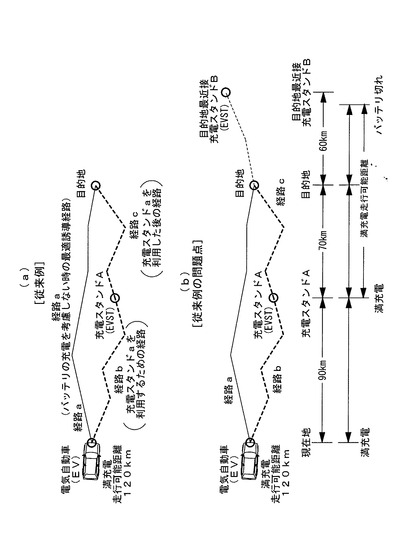
そのため、例えば図8(a)に従来例として示すように、バッテリに満充電の時に例えば120km走行できる電気自動車(EV)が目的地に向けて走行する時、従来のガソリン車等では図中実線で示す経路aのように誘導経路が設定される場合でも、この経路aの必要走行距離が160kmである時には、満充電で通常は120km走行できるこの電気自動車では、目的地まで充電無しで走行することは危険である。
【0012】
したがって、電気自動車に搭載したナビゲーション装置では、例えば最短経路としての経路aにできる限り近接した電気自動車充電スタンド(EVST)を検索し、そこを経由地として設定し、その充電スタンドから目的地に至る誘導経路を演算する。その後前記充電スタンドで満充電したときに走行できる範囲を算出し、その範囲に目的地が存在しないときには、更に同様の処理によって次の充電スタンドを検索し、同様の処理を繰り返して目的地に到達できるとき、目的地への誘導経路として提示するようにしている。
【0013】
それにより図8(a)の例では、通常の誘導経路である経路aにできる限り近く、且つ走行開始時の満充電で走行できることになっている範囲の距離にできる限り近い充電スタンドを検索し、充電スタンドAが検索された例を示している。それにより現在地から充電スタンドAへの経路bが設定される。その後充電スタンドAで満充電するものと仮定し、そこから目的地までの距離は70kmであることを算出したときには、この電気自動車では充分走行可能範囲であるため、充電スタンドAから目的地への経路cは確定する。
【0014】
上記処理によって従来は図8(a)の破線で示すような誘導経路が設定され、これを利用者が確定することにより、以降はこのナビゲーション装置の通常の機能によって、現在地から充電スタンドAを経由して目的地迄、右左折交差点等を含め、安全に且つ確実に車両を目的地に案内することができるようにしている。
【0015】
なお、電気自動車のナビゲーション装置において、充電スタンドと次の充電スタンドとの距離が満充電時の走行可能距離を超える等、目的地まで走行可能な誘導経路が検索できなかった場合には、目的地まで到達不能である旨の警告を行う技術は特許文献1に開示されている。
【0016】
また、電気自動車のナビゲーション装置において、現在のバッテリの残電力量で目的地或いは充電スタンドまで到達できない場合、現在のバッテリ残電力量では目的地まで到達できない旨の表示を行い、最小充電時間を提示する技術は特許文献2に開示されている。
【先行技術文献】
【特許文献】
【0017】
【特許文献1】特開平10−170293号公報
【特許文献2】特開2003−294463号公報
【発明の概要】
【発明が解決しようとする課題】
【0018】
前記のように、電気自動車においては、目的地への誘導経路を演算するに際して、充電スタンドでの充電を考慮した誘導経路の設定は必須である。しかしながら、従来の技術では目的地に到達できればその誘導経路は適切なものとして取り扱われており、目的地に到達できてからの走行については考慮されていなかった。
【0019】
即ち、例えば前記図8(a)のようにして充電スタンドを考慮した目的地への誘導経路ができて走行を開始したとしても、例えば同図(b)に示すように、目的地から現在地に戻ってこようとするとき、或いは次の場所に走行しようとしたとき、目的地に到達したときのこの電気自動車の残電力量は、充電スタンドAで満充電した場合でも既に70km走行しており、残りの電力量では50km程度しか走行することができない。
【0020】
それに対して、目的地には充電設備を備えておらず、目的地に最も近い充電施設は、目的地から60km離れた場所にある充電スタンドBであったときには、目的地に到着した後次の場所に走行することはできなくなり、従来のガソリン車等のガス欠状態と同様に、充電のための車両等の出動を依頼せざるを得なくなる。
【0021】
この点について、前記従来技術としての特許文献1に開示された技術では、目的地に到着できたとしても、その後、戻ってくる途中にバッテリの電力を全て消費してしまった場合や、最寄りの充電スタンドに辿り着けない場合が発生する。また、特許文献2に開示された技術でも、バッテリの電力が全て消費してしまわない位置に充電スタンドが存在することを前提としており、前記問題点を解決することができないことは特許文献1と同様である。
【0022】
したがって本発明は、車両に搭載したバッテリの電力で走行する電気自動車において、目的地を設定する際には、目的地に到着してから次の走行ができるか否かを考慮して、目的地の設定が適切であるかを判定し、次の走行ができないことがわかったときには警告を発することができるようにした電気自動車用目的地設定支援機能付ナビゲーション装置を提供することを主たる目的とする。
【課題を解決するための手段】
【0023】
本発明に係る電気自動車用目的地設定支援機能付ナビゲーション装置は、前記課題を解決するため、目的地を設定する目的地設定手段と、現在地から目的地に至る誘導経路を演算する誘導経路演算手段と、目的地に最も近接している電気自動車充電スタンドを検出する目的地最近接充電スタンド検出手段と、前記誘導経路演算手段で目的地に至る経路が演算できたとき、現在地または目的地に至るために最後に充電を行う最終電気自動車充電スタンドから目的地を経由して、前記目的地最近接電気自動車充電スタンド検出手段で検出した電気自動車充電スタンドまでの距離より、当該電気自動車の満充電時の走行可能距離が短いか否かを判別する目的地最近接電気自動車充電スタンド走行可否判別手段と、前記目的地最近接電気自動車走行可否判別手段で目的地最近接電気自動車充電スタンドに到達できないと判別したとき、目的地に到達した後に走行不能となることの警告出力を行う目的地到達後走行不能警告出力手段とを備えたことを特徴とする。
【0024】
本発明に係る他の電気自動車用目的地設定支援機能付ナビゲーション装置は、前記電気自動車用目的地設定支援機能付ナビゲーション装置において、前記誘導経路演算手段で目的地に至る誘導経路が演算できたとき、更に目的地から目的地最近接電気自動車充電スタンドに走行するための電気自動車充電スタンドを選択する電気自動車充電スタンド選択手段を備え、前記電気自動車充電スタンド選択手段で、前記最終電気自動車充電スタンドで満充電して目的地を経由して目的地最近接電気自動車充電スタンドに走行することができる電気自動車充電スタンドが選択できないとき、前記目的地到達後走行不能警告出力手段が警告出力を行うことを特徴とする。
【0025】
本発明に係る他の電気自動車用目的地設定支援機能付ナビゲーション装置は、前記電気自動車用目的地設定支援機能付ナビゲーション装置において、前記電気自動車充電スタンド選択手段では、目的地最近接電気自動車充電スタンドが現在地または前記最終電気自動車充電スタンドとの間に存在するとき、当該目的地最近接電気自動車充電スタンドを最終電気自動車充電スタンドとして選択することを特徴とする。
【0026】
本発明に係る他の電気自動車用目的地設定支援機能付ナビゲーション装置は、前記電気自動車用目的地設定支援機能付ナビゲーション装置において、前記電気自動車充電スタンド選択手段で、目的地最近接電気自動車充電スタンドが現在地または前記最終電気自動車充電スタンドから目的地の遠方に存在するとき、現在地または前記最終電気自動車充電スタンドと目的地間に存在する電気自動車充電スタンドを最終電気自動車充電スタンドとして選択することを特徴とする。
【0027】
本発明に係る他の電気自動車用目的地設定支援機能付ナビゲーション装置は、前記電気自動車用目的地設定支援機能付ナビゲーション装置において、目的地に電気自動車充電スタンドを併設していることを検出する目的地併設電気自動車充電スタンド検出手段を備え、前記誘導経路演算部で目的地への経路が演算できたときにおいて、前記目的地併設電気自動車充電スタンド検出手段で目的地に電気自動車充電スタンドを併設していることを検出したときには、以降の前記目的地到達後走行不能警告出力のための処理を行わないことを特徴とする。
【発明の効果】
【0028】
本発明は上記のように構成したので、車両に搭載したバッテリの電力で走行する電気自動車において、目的地を設定する際には、目的地に到着してから次の走行ができるか否かを考慮して、目的地の設定が適切であるかを判定し、次の走行ができないことがわかったときには警告を発することができ、適切な目的地の設定を支援することができるようになる。
【図面の簡単な説明】
【0029】
【図1】本発明の実施例の機能ブロック図である。
【図2】同実施例の作動フロー図である。
【図3】同実施例の目的地設定時の作動態様を示す図である。
【図4】同実施例の目的地設定時の他の作動態様を示す図である。
【図5】同実施例の目的地設定時の更に他の作動態様を示す図である。
【図6】同実施例の目的地設定時の更に他の作動態様を示す図である。
【図7】同実施例の目的地設定時の更に他の作動態様を示す図である。
【図8】従来技術とその問題点を説明する図である。
【発明を実施するための形態】
【実施例】
【0030】
本発明の実施例を図面に沿って説明する。図1は本発明の実施例の機能ブロック図であり、本発明を各種の態様で実施することができるようにした機能ブロック図を示している。なお、同図において、各機能を行う機能部は、それぞれ各機能を行う手段ということができる。
【0031】
図1に示す実施例においては、従来から広く用いられているナビゲーション装置に対して、誘導経路の目的地を設定するに際して、目的地に到着した後に走行を継続することができるか否かを判断し、走行を継続できないと判断したときには警告を発することができるようにした各種の機能部を備えた例を示している。
【0032】
したがって、図1に示すナビゲーション装置においては、従来のナビゲーション装置と同様に、各種機能部を総合的に制御を行うソフトウエアをROMに記録し、CPUが適宜RAMを用いて演算を行って所望の作動を行うシステム制御部10を備え、このシステム制御部10に接続した各機能部によって、ナビゲーション装置としての所定の機能を行うことができるようにしている。
【0033】
このシステム制御部10に対して車両位置検出部13を接続し、GPS受信器11の位置データを入力するとともに、更に必要に応じて車速センサや角度センサによる走行距離・方位検出部12からの車両の移動データを入力することによって、車両の現在位置を正確に検出している。また、VICS情報入力部14では、FM電波やビーコン等を受信して交通情報を取り込み、特に渋滞情報を入力することができる。
【0034】
指示信号入力部17では、リモコン15により、或いは音声を認識して利用者の指示信号とし、更にはモニタ20のタッチパネル操作等によって各種の指示信号を入力可能としている。データ入出力部19においては、DVD−ROM、或いはハードディスク、メモリカード等の地図・情報データ記録媒体18から必要な地図データ、施設情報等を取り込み、更にそのデータ記録媒体がハードディスクやメモリカードのように容易にデータの書き込みができるような場合には、メモリカードやUSBメモリ等のデータを読み取って利用することができるように、この地図・情報データ記録媒体18に記録も可能としている。
【0035】
画像出力部21ではナビゲーション装置が利用者に対して案内する各種の画像をモニタ20に出力し、後述するような目的地設定時の警告の出力も行う。音声出力部23においては、ナビゲーション装置の音声出力として、誘導経路の重要な案内をスピーカ22から出力し、必要に応じて後述するような目的地設定時の警告の出力も行う。
【0036】
誘導経路演算部31では、目的地・経由地設定部32において、住所、電話番号、地図のスクロール、近くのランドマーク等を用いる種々の手段により目的地や経由地を設定する。電気自動車充電スタンド(EVST)利用誘導経路演算部33では、本発明が適用される電気自動車において、前記車両位置検出部13で検出した車両位置としての現在地から、前記目的地・経由地設定部32で設定した経由地を経て目的地に至る誘導経路を演算する。
【0037】
その際には、電気自動車にとって必須の充電スタンドを考慮して誘導経路を演算することとなり、現在地から目的地迄現在のバッテリの残電力量で走行できるときは、従来のガソリン車等のように誘導経路を演算することができるが、現在のバッテリの残電力量では目的地まで走行することができないことがわかったときには、できる限り通常の誘導経路に近く、且つ、現在の残電力量で走行できる範囲内でその範囲の限界に近い位置に存在する充電スタンドを検索し、そこから各経由地を経て目的地への誘導経路を更に演算する、という手法を継続することによって、目的地への誘導経路を演算することとなる。
【0038】
したがって、この電気自動車充電スタンド(EVST)利用誘導経路演算部33では、上記のような誘導経路の演算を行うため、充電スタンドの検出は重要な処理であり、そのため図示の例では電気自動車充電スタンド(EVST)検出部34を備え、各地点から前記のような条件を備えた場所に存在する充電スタンドを検出する。
【0039】
図示の例ではその中の目的地併設EVST35で、目的地・経由地設定部32で設定した目的地に電気自動車充電スタンドを併設しているか否かを検出する。また、目的地最近接EVST36では、目的地に最も近接している電気自動車充電スタンドを検出する。また、誘導経路近接EVST37では、目的地に至るまでの間に充電スタンドの利用が必要なとき、できる限り誘導経路に近接した場所に存在する充電スタンドを検出する。
【0040】
EVST選択部38では、特に電気自動車充電スタンド(EVST)利用誘導経路演算部33で誘導経路を演算するに際して、後述するように目的地最近接EVST36にできる限り走行可能となる充電スタンドを選択する。その選択に際しては、電気自動車充電スタンド(EVST)利用誘導経路演算部33との共同により適切な充電スタンドの選択を行う。
【0041】
目的地到達可否判別部39では、誘導経路演算部31で前記のようにして電気自動車充電スタンドを考慮した目的地に至る誘導経路を演算したとき、例えば途中で充電をしなければならなくなるのに対して走行可能な範囲の充電スタンドが存在しないことがわかる等により、目的地・経由地設定部32で設定した目的地及び経由地では走行できる経路は見つからず、誘導経路が演算できなかったときには、目的地に到達できない旨の出力を行う。
【0042】
図1の例では目的地到達不能原因検出出力部40を備え、前記目的地到達可否判別部39から目的地に到達することができない旨の出力があったとき、誘導経路演算部31の演算経過のデータにより、例えば出発後所定の経由地までは走行できたものの、次の経由地に到達できない、或いは各経由地は到達できたものの、目的地には到達できない等の案内を出力する。
【0043】
目的地最近接EVST・目的地間距離算出部41では、前記目的地到達可否判別部39で目的地に到達できる誘導経路が演算できたと判別したとき、前記電気自動車充電スタンド(EVST)検出部34の目的地併設設EVST35が検出されなかった場合に、目的地最近接EVST36の検出結果を用いて、その目的地最近接EVSTと、目的地間の距離(L3)を算出する。
【0044】
目的地経由目的地最近接EVST間距離算出部44では、現在地から目的地まで途中で充電スタンドを利用せずに到着できるときは、現在地から目的地を経由して目的地最近接EVST迄の距離を算出し、また、途中で充電スタンドを利用するときには、そこから目的地を経由して目的地最近接EVST迄の距離を算出する。
【0045】
目的地最近接EVST走行可否判別部42においては、現在地または最終充電スタンドで満充電であることを前提に、各地点からこの電気自動車で走行可能な距離と、目的地経由目的地最近接EVST間距離算出部44で算出した距離とを比較し、現在地または最終EVSTで満充電で走行しても、目的地を経由して目的地最近接EVSTに到達できないか否かを判別する。
【0046】
この目的地最近接EVST走行可否判別部42で前記走行ができないと判別したとき、即ち、目的地に到達できるものの、目的地に最も近い充電スタンド迄走行することができないと判別したときには、最初に誘導経路演算部31にその信号を出力する。誘導経路演算部31では、後述するようにEVST選択部38で特に最終充電スタンドの選択を行い、前記作動を繰り返して、どのような充電スタンドの選択を行っても目的地から目的地最近接EVSTに到達できないと判別したとき、目的地到達後走行不能警告出力部43にその信号を出力する。目的地到達後走行不能警告出力部43では、画像出力部21からモニタ20に対して警告表示を行い、音声出力部23を介してスピーカ22から目的地の設定が適切ではない旨の警告用音声案内を出力する。
【0047】
目的地・経由地変更案内部46では、主として目的地到達不能原因検出出力部40で、適切な充電スタンドが経路中に見つからない等によっていずれかの経由地、或いは目的地に到達できないときの原因を取り込み、利用者に対して経由地或いは目的地を変更する必要があること、及びその原因等を案内する。なお、目的地到達後走行不能警告出力部43では目的地に到達してもその後走行不能になる警告の出力のみを行うとき、この目的地経由地変更案内部46でその詳細な案内の出力を行うようにしても良い。この案内の出力により、利用者がその原因を詳細に検討することによって、適切な行楽施設等の経由地の変更、及びホテルが存在する位置等の目的地の変更の参考にすることができる。
【0048】
誘導経路記憶部47では通常のナビゲーション装置と同様に、誘導経路演算部31で適切な誘導経路が得られて利用者がこれを確認したときには、その誘導経路を記憶する。誘導経路案内部48では、地図画像上に誘導経路を他の道路とは色を変えて太く描画して画面表示したり、車両が誘導経路上の進路を変更すべき交差点に一定距離以内に近づいたときに、交差点を拡大表示し、進路を変更すべき方向を示す矢印等を描画して画面表示したり、音声で右左折の誘導を行うことで、利用者を目的地まで案内することができるようにしている。
【0049】
前記のような機能ブロックからなる本発明のナビゲーション装置においては、例えば図2に示す作動フローに従って順に作動させることにより実施することができる。即ち、図2に示す電気自動車誘導経路設定警告出力処理の例においては、最初経由地・目的地の設定を行うことから開始している(ステップS1)。ここでは経由地の設定は必ずしも必要ない。
【0050】
その後電気自動車充電スタンド(EVST)を利用しながら各経由地を経て目的地に至る誘導経路を演算する(ステップS2)。この演算に際しては、前記図1の誘導経路演算部31における、特に電気自動車充電スタンド(EVST)利用誘導経路演算部33の処理として述べたとおりの演算処理を行う。
【0051】
次いで、目的地に到達できる誘導経路は存在するか否かを判別する(ステップS3)。この処理は図1の目的地到達可否判別部39で、前記のように誘導経路演算部31での演算結果によって行っている。ステップS3において目的地に到達できる誘導経路は存在しないと判別したときには、ステップS11に進んで、設定した経由地或いは目的地では目的地に到達できないことを出力する。
【0052】
その後図2の例では目的地に到達できない原因について、特定の経由地或いは目的地に行くとき、バッテリ切れになる前に利用可能な充電スタンドがないため到達できない、等の案内表示を行う。この処理は図1の目的地・経由地変更案内部46で行っている。
【0053】
次いで経由地・目的地を再設定するか否かを判別し(ステップS13)、再設定すると判別したとき、即ち、利用者が「戻る」のキーを操作したときのような場合は再びステップS1に戻って、経由地・目的地の設定を行う。また、ステップS13においてこれ以上経由地・目的地の設定は行わないと判別したとき、即ち目的地設定終了キー等を押したときのような場合にはこの処理を終了する(ステップS14。
【0054】
ステップS3で目的地に到達できる誘導経路が存在したと判別したときにはステップS4に進み、目的地に電気自動車充電スタンド(EVST)が併設しているか否かを判別する。ここで目的地にEVSTが併設されていると判別したとき、即ち図1の誘導経路演算部31のEVST検出部34における目的地併設EVST検出部35で、目的地にEVSTを併設していることを検出したときには、目的地でこの電気自動車のバッテリを満充電することにより、少なくとも目的地に来た道を戻ることができるので、この誘導経路を決定する。
【0055】
それに対してステップS4で目的地にEVSTは併設していないと判別したときには、ステップS5に進んで、目的地に最も近いEVST、即ち目的地最近接EVSTを検出する。その後現在地または最終充電地点から目的地迄の距離(L2)、及び目的地から目的地最近接EVST迄の距離(L3)により、その合計距離(L2+L3)を算出する(ステップS6)。
【0056】
次いで、前記合計距離(L2+L3)はこの電気自動車の満充電したときに走行可能な距離(L1)より短いか否かを判別する(ステップS7)。ここで合計距離は満充電走行距離より短い、即ち、現在地または最終利用EVSTで満充電してあるときには、目的地を経由して目的地最近接EVSTに走行することができると判別したときには、この誘導経路を決定する(ステップS15)。
【0057】
それに対してステップS7で、合計距離は満充電走行距離より短くはないと判別したときには、図2の例においては後述するように、目的地最近接EVSTの位置に対応した最適最終充電EVSTを選択して誘導経路を再設定する(ステップS8)。その再設定の後、目的地から最近接EVSTに走行できる経路が見つかったか否かを判別し(ステップS9)、見つかったときにはステップS15に進んで再設定した誘導経路を決定する。
【0058】
ステップS9において目的地から最近接EVSTに走行できる経路が見つからなかったと判別したときには、ステップS10に進んで、目的地に到着できてもそれ以降は走行不能になることの警告出力を行う。
【0059】
前記作動を本発明の最も単純化した態様である図3に基づいて説明する。図3の例においては現在地から目的地に電気自動車充電スタンド(EVST)を利用することなく走行できるときの例を示しており、但し、目的地には充電スタンドを併設していないときに、目的地到達以降は走行ができなくなることを検出したときに、警告を出力する例を示している。
【0060】
即ち図3の例においては、本発明の最も基本的な態様として、満充電時の走行可能距離が120kmの電気自動車(EV)が、満充電状態で現在地から目的地に行こうとするとき、ナビゲーション装置で目的地を設定することにより現在地から目的地までの経路とその距離を求めることができ、それにより現在地か目的地まで70kmあることが算出される。この距離は満充電により途中で充電を行う必要なく充分走行できる距離であり、それにより図2のステップS3では目的地に到達できる誘導経路は存在すると判別する。
【0061】
図3の例においては目的地にEVSTは併設していないので図2のステップS4において目的施設にEVSTは存在しないと判別し、ステップS5において目的地に最も近いEVSTを検索し、図示の例では目的地最近接充電スタンドAを検出した例を示している。その後ステップS6において、現在地から目的地、及び目的地から目的地最近接EVST迄の距離の合計距離を算出し、図示の例では現在地から目的地までの距離L2は70km、目的地から目的地最近接EVST迄の距離L3は60kmであり、したがってその合計距離は130kmである例を示している。
【0062】
その後ステップS7において、合計距離は満充電走行距離(L1)より短いか否かを判別し、図示の例ではL1が120kmで、L2+L3=130kmであるので、L1<L2+L3であり、ステップS8に進み、目的地最近接EVSTの位置に対応した最適最終充電EVSTを選択して誘導経路を再設定する。図示の例では現在地から目的地までEVSTは存在しないので最適EVSTも存在しない。
【0063】
図2の作動フローではその後ステップS8において目的地から目的地最近接EVSTに走行できる経路が見つかったか否かを判別し、図示の例では前記のように見つからないので、ステップS10に進んで目的地に到着できてもそれ以降は走行不能になることを警告出力することとなる。図3の例では同図(b)に示すように「危険 目的地到着後バッテリ切れ」の警告出力例を示し、同図(c)には「危険 現在設定しようとしているルートでは 目的地到着後最寄りの充電スタンドまで走行できません」の警告と案内を行った例を示している。
【0064】
このように、本発明においては、車両走行開始前の目的地設定時において、目的地に到着した後、バッテリ切れで走行不能になることを警告することができ、この目的地には行かない方が良いこと、更に必要なときには別の目的地に変更した方が良いことを利用者に知らせることができるようになる。
【0065】
前記図3の態様においては、目的地の最近接EVSTが現在地から見て、目的地より遠い位置にあるのに対して、図4の態様では目的地最近接EVSTが現在地側に存在する例、即ち現在地と目的地間に目的地最近接EVSTが存在する例を示している。図示の例では現在地から目的地まで最初の満充電状態で走行できるので、途中で充電することを考慮する必要がなかったものであるが、目的地に到着してから次の走行に際して、図4(a)に示すように、また前記図3の例と同様に、目的地から60km離れた場所に目的地最近接EVST(B)が存在するため、バッテリ切れとなってしまう。
【0066】
このような場合、本発明においては図2のステップS8において目的地最近接EVSTの位置に対応した最適最終充電EVSTを選択して誘導経路を再設定する。即ち、目的地最近接EVSTが目的地の手前側に存在することにより目的地に到着する前にこの充電スタンドで満充電することにより、ここから120km走行可能となり、目的地に到着してからでも、少なくとも(120km−40km=)80km走行できるため、この目的地最近接充電スタンドBに走行することができ、以降の走行を継続することができることがわかる。
【0067】
したがって本発明においては図3のステップS8で、目的地最近接EVSTの位置に対応した最適最終充電EVST(B)を選択して、図4(b)に示すように最初設定した最も適切された経路cから、少しは遠回りになっても目的地到達以降の走行を考慮して、経路eと経路dを通る誘導経路を再設定することとなる。
【0068】
このようにしてステップS9の判別では目的地から最近接EVSTに走行できる経路が見つかったと判別され、ステップS15で誘導経路をが決定される。そのためステップS10の警告出力は行われない。図4(b)に示すような誘導経路を設定して実際に走行するときには、前記のような演算結果を記憶しておき、目的地最近接充電スタンドBに接近したときには、目的地に到着後の走行を考慮してこの充電スタンドで満充電しておくことを忘れないような案内を行うことが好ましい。
【0069】
図4に示す例においては、目的地最近接EVSTが現在地と目的地との間に存在する時、その目的地最近接EVSTを利用することにより、目的地到着後にも以降の走行を行うことができるようになった例を示したが、例えば図5に示す例においては、目的地最近接EVSTが現在地と目的地との間に存在して、そこで満充電しても適切ではない例を示している。
【0070】
即ち、図5に示す例においては目的地最近接EVSTが目的地から現在地側で70kmの位置に存在するときの例を示しており、同図(a)の例では例えば最短経路として経路cが設定されて目的地に到着できる場合に、目的地最近接EVSTが目的地から70km離れた位置にあるため、目的地に到達できても以降の走行ができなくなっている状態を示している。
【0071】
このとき図2のステップS8で、目的地最近接EVSTの位置に対応した最適最終充電EVSTを選択しようとし、図5(b)の目的地最近接充電スタンドCで充電するように選択しようとして同図(b)に経路g、経路fを通る経路を設定しようとすると、それでは目的地に到着後の残電力量では50kmしか走行できないため、目的地最近接充電スタンドC迄走行できず、この時には図2のステップS9で目的地から最近接EVSTに走行できる経路が見つからなかったと判別して、ステップS10において前記のような警告出力を行うこととなる。
【0072】
その原因は、図示するように、目的最地近接EVSTが目的地と現在地の間に存在しても、目的地から目的地最近接EVST迄の距離が、この電気自動車の満充電時の走行可能距離である120kmの2分の1である60kmよりも大きいため、目的地に到着した後その充電スタンドに走行することができないことによる。このような処理を図2のステップS8、及びステップS9で行うこととなる。
【0073】
図6には目的地最近接EVSTが現在地から見て目的地より遠い位置に存在する、前記図3の例と同様の態様の例を示している。図6に示す例においては、現在地から目的地まで現在地の満充電によって走行でき、それにより経路hが得られた後、目的地最近接EVSTには図3と同様の理由により到達することができないと判別されている。
【0074】
この状態で図2のステップS8では前記のような誘導経路の再設定を試みた結果、図6(b)に示すように現在地と目的地の間に充電スタンドDが存在することが見つかった例を示している。即ち、図2のステップS3において通常の誘導経路の演算で図6の経路hによって最短経路等で到達することができることがわかった場合でも、その誘導経路では目的地から目的地最近接EVSTに辿り着けないことがわかったとき、ステップS8において充電スタンドを考慮した誘導経路を再設定する処理を行う。
【0075】
ここで現在地と目的地との間において目的地から50km手前に充電スタンドDが見つかった場合には、ここで満充電することにより、目的地迄走行しても70km走行できるため、目的地最近接EVSTである充電スタンドA迄走行することができる。従って、このような場合には図2のステップS10における警告は行わず、新たな経路を誘導経路として設定する。
【0076】
前記図3〜図6には本発明を単純化して説明するため、現在地から目的地まで充電しなくても走行可能なときの例を示したが、図7には途中で充電しなければ目的地に到達することができないときの例を示している。
【0077】
即ち図7に示す例においては前記図8(b)に示す従来例とその課題を示す図と同様の走行態様を示している。図7に示す例では満充電で走行可能な距離が120kmの電気自動車(EV)が、図示する現在地から目的地に走行しようとするとき、ガソリン車等の車両では経路aとして示す誘導経路が演算されるのに対して、その距離が160kmあるため、この電気自動車では途中で充電しなければ目的地に到達できないので、その誘導経路にできるだけ近い場所で、走行可能範囲の限界に比較的近い電気自動車充電スタンド(EVST)を検出する。
【0078】
その結果、現在地から90km先の充電スタンドAが見つかり、この充電スタンドAへの経路bが決定される。その後充電スタンドAで満充電したと仮定し、そこから目的地への経路を演算して経路cが求まったとき、その距離は70kmであることからその状態で目的地に走行することとなる。
【0079】
このような状態で目的地に到着した後、次に走行しようとすると、目的地に最も近い充電スタンドは充電スタンドBであり、そこまでの距離は60kmであったときには、目的地に到着した状態での残存電力量では50kmしか走行できないため、この充電スタンドBには到達することができない。この時には当然、先に充電した充電スタンドAにも走行することができない状態となっている。
【0080】
本発明ではその状態を図1の目的地最近接EVST走行可否判別部42で、目的地に最も近接している充電スタンドに走行できないことを検出している。それいにより、図3(b)及び(c)に示すような警告表示、及び音声による同様の警告出力を行う。このように、現在地から目的地迄の間に充電施スタンドを利用する場合においても、図3と同様の態様で本発明を実施することができ、図2の作動フローにおいてもステップS6の処理で最終充電地点から目的地までの距離をL2として演算することとなる。また、ステップS8の目的地最近接EVSTの位置に対応した最適最終充電EVSTを選択して誘導経路を再設定する処理も同様にして行うこととなる。
【0081】
図7(b)には更に、現在地から目的地までの距離が遠いことにより、複数の充電スタンドを利用して目的地に到達するときの例を示しており、ここでは目的地に最も近い最終充電スタンドPを利用した経路を示している。ここにおいても同図(a)と同様の処理によって本発明を実施することができることがわかる。また図2のステップS8の目的地最近接EVSTの位置に対応した最適最終充電EVSTを選択して誘導経路を再設定する処理も同様にして行うこととなる。
【0082】
なお、前記実施例では本発明における電気自動車が誘導経路に沿って走行するときの例を示したが、本発明は目的地に到着した後に次の走行ができなくなることにより、これから走行しようとしている場所には行かない方が良いという警告を出力するものであり、単にその情報を得て確認することができれば良いため、必ずしも誘導経路に沿って走行することは必要としない。
【0083】
また、前記実施例では車両に搭載したナビゲーション装置により所望の作動を行うようにした例を示したが、それ以外に携帯型ナビゲーション装置や、ナビゲーション機能付携帯電話を含め、各種のナビゲーション機能付携帯情報機器において、目的地に到着後走行できるか否かの判定用に有効に利用することができる。
【符号の説明】
【0084】
10 システム制御部
11 GPS受信器
12 走行距離・方位検出部
13 車両位置検出部
14 VICS情報入力部
15 リモコン
16 音声認識部
17 指示信号入力部
18 地図・情報データ記録媒体
19 データ入出力部
20 モニタ
21 画像出力部
22 スピーカ
23 音声出力部
31 誘導経路演算部
32 目的地・経由地設定部
33 電気自動車充電スタンド(EVST)利用誘導経路演算部
34 電気自動車充電スタント(EVST)検出部
35 目的地併設EVST
36 目的地最近接EVST
37 誘導経路近接EVST
38 EVST選択部
39 目的地到達可否判別部
40 目的地到達不能原因検出出力部
41 目的地最近接EVST・目的地間距離算出部
42 目的地最近接EVST走行可否判別部
43 目的地到達後走行不能警告出力部
44 現在地または最終利用EVST・目的地間距離算出部
45 目的地到達後走行可能距離算出部
46 目的地・経由地変更案内部
47 誘導経路記憶部
48 誘導経路案内部
【特許請求の範囲】
【請求項1】
目的地を設定する目的地設定手段と、
現在地から目的地に至る誘導経路を演算する誘導経路演算手段と、
目的地に最も近接している電気自動車充電スタンドを検出する目的地最近接充電スタンド検出手段と、
前記誘導経路演算手段で目的地に至る経路が演算できたとき、現在地または目的地に至るために最後に充電を行う最終電気自動車充電スタンドから目的地を経由して、前記目的地最近接電気自動車充電スタンド検出手段で検出した電気自動車充電スタンドまでの距離より、当該電気自動車の満充電時の走行可能距離が短いか否かを判別する目的地最近接電気自動車充電スタンド走行可否判別手段と、
前記目的地最近接電気自動車走行可否判別手段で目的地最近接電気自動車充電スタンドに到達できないと判別したとき、目的地に到達した後に走行不能となることの警告出力を行う目的地到達後走行不能警告出力手段とを備えたことを特徴とする電気自動車用目的地設定支援機能付ナビゲーション装置。
【請求項2】
前記誘導経路演算手段で目的地に至る誘導経路が演算できたとき、更に目的地から目的地最近接電気自動車充電スタンドに走行するための電気自動車充電スタンドを選択する電気自動車充電スタンド選択手段を備え、
前記電気自動車充電スタンド選択手段で、前記最終電気自動車充電スタンドで満充電して目的地を経由して目的地最近接電気自動車充電スタンドに走行することができる電気自動車充電スタンドが選択できないとき、前記目的地到達後走行不能警告出力手段が警告出力を行うことを特徴とする請求項1記載の電気自動車用目的地設定支援機能付ナビゲーション装置。
【請求項3】
前記電気自動車充電スタンド選択手段では、目的地最近接電気自動車充電スタンドが現在地または前記最終電気自動車充電スタンドとの間に存在するとき、当該目的地最近接電気自動車充電スタンドを最終電気自動車充電スタンドとして選択することを特徴とする請求項2記載の電気自動車用目的地設定支援機能付ナビゲーション装置。
【請求項4】
前記電気自動車充電スタンド選択手段で、目的地最近接電気自動車充電スタンドが現在地または前記最終電気自動車充電スタンドから目的地の遠方に存在するとき、現在地または前記最終電気自動車充電スタンドと目的地間に存在する電気自動車充電スタンドを最終電気自動車充電スタンドとして選択することを特徴とする請求項2記載の電気自動車用目的地設定支援機能付ナビゲーション装置。
【請求項5】
目的地に電気自動車充電スタンドを併設していることを検出する目的地併設電気自動車充電スタンド検出手段を備え、
前記誘導経路演算部で目的地への経路が演算できたときにおいて、前記目的地併設電気自動車充電スタンド検出手段で目的地に電気自動車充電スタンドを併設していることを検出したときには、以降の前記目的地到達後走行不能警告出力のための処理を行わないことを特徴とする請求項1記載の電気自動車用目的地設定支援機能付ナビゲーション装置。
【請求項1】
目的地を設定する目的地設定手段と、
現在地から目的地に至る誘導経路を演算する誘導経路演算手段と、
目的地に最も近接している電気自動車充電スタンドを検出する目的地最近接充電スタンド検出手段と、
前記誘導経路演算手段で目的地に至る経路が演算できたとき、現在地または目的地に至るために最後に充電を行う最終電気自動車充電スタンドから目的地を経由して、前記目的地最近接電気自動車充電スタンド検出手段で検出した電気自動車充電スタンドまでの距離より、当該電気自動車の満充電時の走行可能距離が短いか否かを判別する目的地最近接電気自動車充電スタンド走行可否判別手段と、
前記目的地最近接電気自動車走行可否判別手段で目的地最近接電気自動車充電スタンドに到達できないと判別したとき、目的地に到達した後に走行不能となることの警告出力を行う目的地到達後走行不能警告出力手段とを備えたことを特徴とする電気自動車用目的地設定支援機能付ナビゲーション装置。
【請求項2】
前記誘導経路演算手段で目的地に至る誘導経路が演算できたとき、更に目的地から目的地最近接電気自動車充電スタンドに走行するための電気自動車充電スタンドを選択する電気自動車充電スタンド選択手段を備え、
前記電気自動車充電スタンド選択手段で、前記最終電気自動車充電スタンドで満充電して目的地を経由して目的地最近接電気自動車充電スタンドに走行することができる電気自動車充電スタンドが選択できないとき、前記目的地到達後走行不能警告出力手段が警告出力を行うことを特徴とする請求項1記載の電気自動車用目的地設定支援機能付ナビゲーション装置。
【請求項3】
前記電気自動車充電スタンド選択手段では、目的地最近接電気自動車充電スタンドが現在地または前記最終電気自動車充電スタンドとの間に存在するとき、当該目的地最近接電気自動車充電スタンドを最終電気自動車充電スタンドとして選択することを特徴とする請求項2記載の電気自動車用目的地設定支援機能付ナビゲーション装置。
【請求項4】
前記電気自動車充電スタンド選択手段で、目的地最近接電気自動車充電スタンドが現在地または前記最終電気自動車充電スタンドから目的地の遠方に存在するとき、現在地または前記最終電気自動車充電スタンドと目的地間に存在する電気自動車充電スタンドを最終電気自動車充電スタンドとして選択することを特徴とする請求項2記載の電気自動車用目的地設定支援機能付ナビゲーション装置。
【請求項5】
目的地に電気自動車充電スタンドを併設していることを検出する目的地併設電気自動車充電スタンド検出手段を備え、
前記誘導経路演算部で目的地への経路が演算できたときにおいて、前記目的地併設電気自動車充電スタンド検出手段で目的地に電気自動車充電スタンドを併設していることを検出したときには、以降の前記目的地到達後走行不能警告出力のための処理を行わないことを特徴とする請求項1記載の電気自動車用目的地設定支援機能付ナビゲーション装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】

【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2012−118599(P2012−118599A)
【公開日】平成24年6月21日(2012.6.21)
【国際特許分類】
【出願番号】特願2010−265211(P2010−265211)
【出願日】平成22年11月29日(2010.11.29)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.VICS
【出願人】(000101732)アルパイン株式会社 (2,424)
【Fターム(参考)】
【公開日】平成24年6月21日(2012.6.21)
【国際特許分類】
【出願日】平成22年11月29日(2010.11.29)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.VICS
【出願人】(000101732)アルパイン株式会社 (2,424)
【Fターム(参考)】
[ Back to top ]