
電気調理器、煮込み処理方法、および、しみ込み処理方法
【課題】煮物に味をしみ込ませつつ、煮物の温度を食べごろなものに調整することができる電気調理器を提供するを提供する。
【解決手段】電気調理器100は、食材が載置される鍋を加熱するためのヒータ150と、ヒータを制御することによって食材に味をしみ込ませるためのしみ込み処理を実行するための制御手段110とを備える。制御手段は、しみ込み処理において、鍋の温度を下げる第1のステップと、第1のステップの後に、ヒータを制御することによって鍋を第1の所定温度に向けて加熱する第2のステップと、第1のステップの後に、ヒータを制御することによって鍋を第1の所定温度未満の第2の所定温度に維持させる第3のステップとを実行する。
【解決手段】電気調理器100は、食材が載置される鍋を加熱するためのヒータ150と、ヒータを制御することによって食材に味をしみ込ませるためのしみ込み処理を実行するための制御手段110とを備える。制御手段は、しみ込み処理において、鍋の温度を下げる第1のステップと、第1のステップの後に、ヒータを制御することによって鍋を第1の所定温度に向けて加熱する第2のステップと、第1のステップの後に、ヒータを制御することによって鍋を第1の所定温度未満の第2の所定温度に維持させる第3のステップとを実行する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、電気的に鍋を加熱することが可能な電気調理器に関し、特に制御手段によって各種の調理処理を実行することが可能な電気調理器に関する。
【背景技術】
【0002】
電気的に鍋を加熱するための電気調理器が知られている。このような電気調理器の中には、制御手段がヒータを制御することによって、食材を煮込むための煮込み処理や、食材に味をしみ込ませるためのしみ込み処理を実行可能なものがある。
【0003】
たとえば、特許文献1には、電気調理器が開示されている。特許文献1によると、電気調理器は、煮物類を行う煮込みモードと、煮込みモードを選択する選択手段とを備える。電気調理器は、煮込みモードの選択により、所定の第1の温度まで加熱した後、第1の温度よりも低い第2の温度に所定時間維持することを含む煮込みモードにて加熱手段を制御する煮込み制御手段を備える。
【0004】
また、特許文献2には、電気圧力鍋が開示されている。特許文献2によると、電気圧力鍋は、耐圧構造の圧力鍋と、該圧力鍋内を加熱昇圧する加熱手段と、該加熱手段による内鍋内の加熱昇圧状態を制御する制御手段とを備える。電気圧力鍋は、上記圧力鍋内の温度が所定の温度よりも高い第1の温度付近の高圧状態で加熱調理する高圧調理工程と、上記高圧調理工程が終了した後、上記圧力鍋内の温度が、上記所定の温度よりも低い第2の温度付近で煮込み調理する煮込み調理工程との少なくとも2組の調理工程が連続する自動煮込み調理メニューを有する。上記制御手段は、所定のメニュー選択手段により上記自動煮込み調理メニューが選択されると、上記圧力調理工程と煮込み調理工程の各々に応じて予じめ設定された加熱出力又は加熱時間で上記加熱手段を適切に制御する。
【0005】
また、特許文献3にも、電気調理器が開示されている。特許文献3によると、電気調理器は、煮物類を行う煮込みモードと、煮込みモードを選択する選択手段とを備える。電気調理器は、煮込みモードの選択により、所定の初期加熱温度まで初期加熱した後、それよりも低い温度に低温加熱する煮込みモードにて加熱手段を制御する煮込み制御手段を備える。初期加熱の過程で煮込み材料の調理進行度を判定し、この判定結果に基づき初期加熱温度への到達時に所定の調理進行度を満足するよう加熱手段の加熱出力を制御する。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2005−296366号公報
【特許文献2】特開2004−261476号公報
【特許文献3】特開2005−296247号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
煮物は温度が下がるときに味がしみ込んでいく。そのため、煮物を作る際には、煮込み処理だけでなく、味をしみ込ませるためのしみ込み処理も実行することが好ましい。しかしながら、ユーザが自身で煮物の加熱を停止するだけでは、味をしみ込ませることはできても、煮物の温度が食するには低すぎる温度まで下がってしまう。
【0008】
本発明はある局面に従うと、かかる問題を解決するためになされたものであり、その目的は、自動的に、煮物に味をしみ込ませつつ、煮物の温度を食べごろなものに調整することができる装置を提供することである。
【0009】
また、煮魚は短時間で加熱することによってふっくらと仕上げることができる。逆に、根菜は、ゆっくり加熱することによって中まで柔らかく仕上げることができる。しかしながら、煮魚と根菜とが含まれる煮物料理に関しては、煮魚と根菜の両者に適したヒータの制御を行うことが難しい。たとえば、所定の温度に達するまでヒータの出力を大きめに設定し、所定の温度に達した後にヒータの出力を小さめに設定する場合には、当該所定の温度に達するまでに時間がかかり過ぎて煮崩れを起こしてしまう可能性が高くなる。
【0010】
本発明は別の局面に従うと、かかる問題を解決するためになされたものであり、その目的は、煮魚や根菜等の煮物全般に適したヒータの制御が可能な装置を提供することである。
【課題を解決するための手段】
【0011】
この発明のある局面に従うと、電気調理器は、食材が載置される鍋を加熱するためのヒータと、ヒータを制御することによって食材に味をしみ込ませるためのしみ込み処理を実行するための制御手段とを備える。制御手段は、しみ込み処理において、ヒータによる加熱を第1の所定時間停止させる第1のステップと、第1のステップの後に、ヒータを制御することによって鍋を第1の所定温度に向けて加熱する第2のステップと、第1のステップの後に、ヒータを制御することによって鍋を第1の所定温度未満の第2の所定温度に維持させる第3のステップとを実行する。
【0012】
この発明の別の局面に従うと、電気調理器は、食材が載置される鍋を加熱するためのヒータと、ヒータを制御することによって食材を煮込むための煮込み処理を実行するための制御手段とを備える。制御手段は、煮込み処理において、第1の所定時間、第1の所定の出力にてヒータを駆動させる第1のステップと、第1のステップの後に、第2の所定時間、第1の所定の出力未満の第2の所定の出力にてヒータを駆動させる第2のステップと、を実行する。
【0013】
この発明の別の局面に従うと、食材が載置される鍋を加熱するためのヒータを制御することによって食材に味をしみ込ませるためのしみ込み処理方法が提供される。しみ込み処理方法は、ヒータによる加熱を第1の所定時間停止させる第1のステップと、第1のステップの後に、ヒータを制御することによって鍋を第1の所定温度に向けて加熱する第2のステップと、第1のステップの後に、ヒータを制御することによって鍋を第1の所定温度未満の第2の所定温度に維持させる第3のステップとを備える。
【0014】
この発明の別の局面に従うと、食材が載置される鍋を加熱するためのヒータを利用して食材を煮込むための煮込み処理方法が提供される。煮込み処理方法は、第1の所定時間、第1の所定の出力にてヒータを駆動させる第1のステップと、第1のステップの後に、第2の所定時間、第1の所定の出力未満の第2の所定の出力にてヒータを駆動させる第2のステップとを備える。
【発明の効果】
【0015】
以上のように、この発明のある局面によれば、自動的に、煮物に味をしみ込ませつつ、煮物の温度を食べごろなものに調整することができるようになる。また、この発明の別の局面によれば、煮魚や根菜等の煮物全般に適したヒータの制御が可能になる。
【図面の簡単な説明】
【0016】
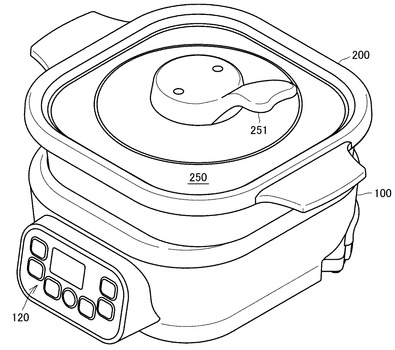
【図1】本実施の形態に係る電気調理器100を示す外観図である。
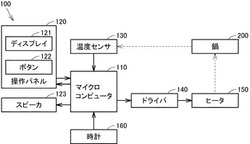
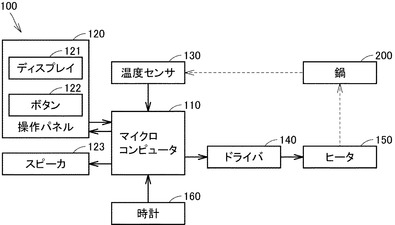
【図2】本実施の形態に係る電気調理器100のハードウェア構成を示すブロック図である。
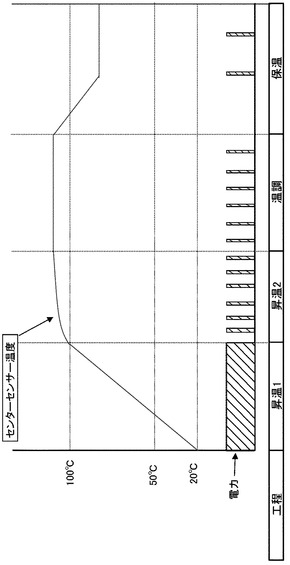
【図3】煮込みコースにおけるマイクロコンピュータ110のシーケンスを示すイメージ図である。
【図4】煮込みコースにおけるマイクロコンピュータ110の処理手順を示すフローチャートである。
【図5】しみ込みコースにおけるマイクロコンピュータ110のシーケンスを示すイメージ図である。
【図6】しみ込みコースにおけるマイクロコンピュータ110の処理手順を示すフローチャートである。
【図7】煮込み・しみ込みコースにおけるマイクロコンピュータ110のシーケンスを示すイメージ図である。
【図8】煮込み・しみ込みコースにおけるマイクロコンピュータ110の処理手順を示すフローチャートである。
【図9】鍋物(強)コースにおけるマイクロコンピュータ110のシーケンスを示すイメージ図である。
【図10】鍋物(強)コースにおけるマイクロコンピュータ110の処理手順を示すフローチャートである。
【図11】鍋物(中)コースにおけるマイクロコンピュータ110のシーケンスを示すイメージ図である。
【図12】鍋物(弱)コースにおけるマイクロコンピュータ110のシーケンスを示すイメージ図である。
【図13】鍋物(保温)コースにおけるマイクロコンピュータ110のシーケンスを示すイメージ図である。
【図14】揚げ物コースにおけるマイクロコンピュータ110のシーケンスを示すイメージ図である。
【図15】揚げ物コースにおけるマイクロコンピュータ110の処理手順を示すフローチャートである。
【発明を実施するための形態】
【0017】
以下、図面を参照しつつ、本発明の実施の形態について説明する。以下の説明では、同一の部品には同一の符号を付してある。それらの名称および機能も同じである。したがって、それらについての詳細な説明は繰り返さない。
【0018】
<電気調理器のハードウェア構成>
まず、電気調理器100の全体構成について説明する。図1は、本実施の形態に係る電気調理器100を示す外観図である。図2は、本実施の形態に係る電気調理器100のハードウェア構成を示すブロック図である。
【0019】
図1および図2を参照して、本実施の形態に係る電気調理器100には、鍋200が載置される。鍋200の内側には、食材が載置される。鍋200の上部には、蓋250が載置される。本実施の形態においては、鍋200と蓋250とが圧着されることによって、鍋200の内側の空間の圧力を大気圧よりも大きくすることができる。
【0020】
電気調理器100は、電気調理器100本体の外面に配置される操作パネル120を含む。操作パネル120は、ディスプレイ121と、ボタン122を含む。操作パネル120は、ユーザによるボタン122操作に対応する命令をマイクロコンピュータ110に入力する。たとえば、ユーザは、ボタン122を操作することによって、電気調理器100を、煮込みコース、しみ込みコース、煮込み・しみ込みコース、保温コース、鍋物(強)コース、鍋物(中)コース、鍋物(弱)コース、鍋物(保温)コース、揚げ物コースに移行させる。ディスプレイ121は、マイクロコンピュータ110からの指令に基づいて、テキストや画像を表示する。
【0021】
電気調理器100は、電気調理器100の外面に配置されるスピーカ123を含む。スピーカ123は、マイクロコンピュータ110からの信号に基づいて、電子音や、音声ガイドなどを出力する。
【0022】
電気調理器100は、鍋200の下面および/または側面の温度を計測するための温度センサ130を含む。温度センサ130は、鍋200の下面および/または側面の温度を測定して、測定結果をマイクロコンピュータ110に入力する。
【0023】
電気調理器100は、鍋200の下面および/または側面に配置され、鍋200の下面および/または側面を加熱するためのヒータ150を含む。ヒータ150は、ドライバ140を介して、マイクロコンピュータ110に接続されている。ドライバ140は、マイクロコンピュータ110からの信号に基づいて、ヒータ150の出力を変更する。本実施の形態においては、マイクロコンピュータ110は、ドライバ140を介して、ヒータ150の出力を多段階(たとえば、レベル0〜レベル16)で制御することができる。
【0024】
電気調理器100は、時計160を含む。時計160は、マイクロコンピュータ110に現在時刻を入力する。時計160は、所定の時点からの経過時間を計測するためのタイマの役割も果たし、マイクロコンピュータ110に当該経過時間も入力する。ただし、時計160の代わりに、単なるタイマを利用してもよい。
【0025】
電気調理器100は、電気調理器100の各部を制御するためのマイクロコンピュータ110を含む。より詳細には、マイクロコンピュータ110は、演算を行うマイクロプロセッサと、プログラムやデータを記憶するメモリなどを含む。マイクロコンピュータ110は、マイクロプロセッサがメモリに記憶されているプログラムを実行することにって、電気調理器100の各部(たとえば、ヒータ150やディスプレイ121など)を制御する。
【0026】
本実施の形態においては、マイクロコンピュータ110は、操作パネル120を介して入力されるユーザ命令に応じて、煮込みコース、しみ込みコース、煮込み・しみ込みコース、保温コース、鍋物(強)コース、鍋物(中)コース、鍋物(弱)コース、鍋物(保温)コース、揚げ物コースへと移行する。以下では、それぞれのコースにおけるマイクロコンピュータ110の動作について詳述する。
【0027】
<煮込みコース>
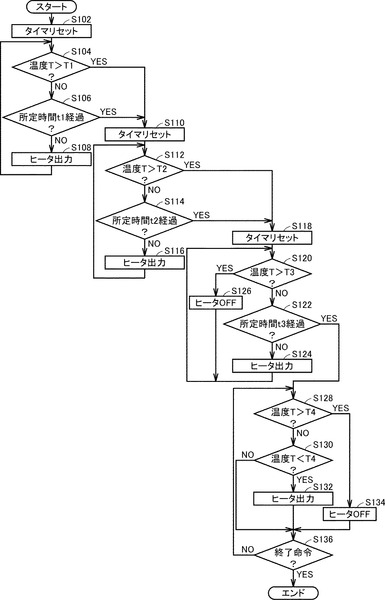
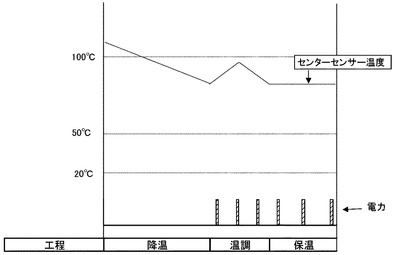
まず、煮込みコースにおけるマイクロコンピュータ110の動作について説明する。図3は、煮込みコースにおけるマイクロコンピュータ110のシーケンスを示すイメージ図である。図4は、煮込みコースにおけるマイクロコンピュータ110の処理手順を示すフローチャートである。
【0028】
マイクロコンピュータ110は、操作パネル120を介して、ユーザから「煮込みコース」へ移行するための命令を受け付ける。マイクロコンピュータ110のマイクロプロセッサは、当該命令を受け付けると、メモリのプログラム(図3に記載のシーケンスを規定する。)に基づいて図4に記載の煮込み処理をスタートする。
【0029】
図3および図4を参照して、マイクロコンピュータ110は、時計160のタイマをリセットする(ステップS102)。マイクロコンピュータ110は、温度センサ130から測定温度Tを取得する。マイクロコンピュータ110は、測定温度Tが、第1の煮込み移行温度T1よりも大きいか否かを判断する(ステップS104)。測定温度Tが、第1の煮込み移行温度T1よりも大きい場合(ステップS104にてYESである場合)、マイクロコンピュータ110は、ステップS110からの処理を実行する。
【0030】
測定温度Tが、第1の煮込み移行温度T1以下である場合(ステップS104にてNOである場合)、マイクロコンピュータ110は、時計160を参照して、第1の煮込み時間t1が経過したか否かを判断する(ステップS106)。第1の煮込み時間t1が経過していない場合(ステップS106にてNOである場合)、マイクロコンピュータ110は、ドライバ140を介して、ヒータ150の出力を最大にする(ステップS108)。マイクロコンピュータ110は、ステップS104からの処理を繰り返す。
【0031】
第1の煮込み時間t1が経過した場合(ステップS106にてYESである場合)、マイクロコンピュータ110は、時計160のタイマをリセットする(ステップS110)。マイクロコンピュータ110は、温度センサ130から測定温度Tを取得する。マイクロコンピュータ110は、測定温度Tが、第2の煮込み移行温度T2よりも大きいか否かを判断する(ステップS112)。測定温度Tが、第2の煮込み移行温度T2よりも大きい場合(ステップS112にてYESである場合)、マイクロコンピュータ110は、ステップS118からの処理を実行する。
【0032】
測定温度Tが、第2の煮込み移行温度T2以下である場合(ステップS112にてNOである場合)、マイクロコンピュータ110は、時計160を参照して、第2の煮込み時間t2が経過したか否かを判断する(ステップS114)。第2の煮込み時間t2が経過していない場合(ステップS114にてNOである場合)、マイクロコンピュータ110は、ドライバ140を介して、ヒータ150の出力を所定値にする(ステップS116)。マイクロコンピュータ110は、ステップS112からの処理を繰り返す。
【0033】
第2の煮込み時間t2が経過した場合(ステップS114にてYESである場合)、マイクロコンピュータ110は、時計160のタイマをリセットする(ステップS118)。マイクロコンピュータ110は、温度センサ130から測定温度Tを取得する。マイクロコンピュータ110は、測定温度Tが、温調温度T3よりも大きいか否かを判断する(ステップS120)。測定温度Tが、温調温度T3よりも大きい場合(ステップS120にてYESである場合)、マイクロコンピュータ110は、ドライバ140を介して、ヒータ150をOFFする(ステップS126)。マイクロコンピュータ110は、ステップS120からの処理を繰り返す。
【0034】
測定温度Tが、温調温度T3以下である場合(ステップS120にてNOである場合)、マイクロコンピュータ110は、時計160を参照して、温調時間t3が経過したか否かを判断する(ステップS122)。温調時間t3が経過していない場合(ステップS122にてNOである場合)、マイクロコンピュータ110は、ヒータ150の出力を所定値にする(ステップS124)。マイクロコンピュータ110は、ステップS120からの処理を繰り返す。
【0035】
なお、本実施の形態においては、温調時間t3は、ユーザの設定によって変化するものであり、第1および第2の煮込み時間は予め設定されているものとする。より詳細には、マイクロコンピュータ110は、操作パネル120を介して、ユーザから、煮込み処理が開始されてから終了するまでの煮込み処理時間t0の入力を受け付ける。たとえば、マイクロコンピュータ110は、ユーザから処理時間t0が入力されると、以下の数式(1)に基づいて、温調時間t3を計算する。
t3=t0−t1−t2…(1)
【0036】
図4に戻って、温調時間t3が経過した場合(ステップS122にてYESである場合)、マイクロコンピュータ110は、温度センサ130から測定温度Tを取得する。マイクロコンピュータ110は、測定温度Tが、保温温度T4よりも大きいか否かを判断する(ステップS128)。測定温度Tが、保温温度T4よりも大きい場合(ステップS128にてYESである場合)、マイクロコンピュータ110は、ドライバ140を介して、ヒータ150をOFFする(ステップS134)。マイクロコンピュータ110は、ステップS136からの処理を実行する。
【0037】
測定温度Tが、保温温度T4より大きくない場合(ステップS128にてNOである場合)、マイクロコンピュータ110は、測定温度Tが、保温温度T4よりも小さいか否かを判断する(ステップS130)。測定温度Tが、保温温度T4よりも小さい場合(ステップS130にてYESである場合)、マイクロコンピュータ110は、ドライバ140を介して、ヒータ150の出力を所定値にする(ステップS132)。マイクロコンピュータ110は、ステップS136からの処理を実行する。
【0038】
測定温度Tが、保温温度T4よりも小さくない場合(ステップS130にてNOである場合)、マイクロコンピュータ110は、操作パネル120を介して、ユーザから煮込みコースの終了命令を受け付けたか否かを判断する(ステップS136)。ユーザから煮込みコースの終了命令を受け付けていない場合(ステップS136にてNOである場合)、ステップS128からの処理を繰り返す。一方、ユーザから煮込みコースの終了命令を受け付けた場合(ステップS136にてYESである場合)、マイクロコンピュータ110は、煮込み処理を終了する。
【0039】
このように、本実施の形態に係る電気調理器100は、所定時間が経過するまで、ヒータ150の出力を最大にすることによって、短時間の間に魚などをふっくらと仕上げることができる。その後、電気調理器100は、所定時間が経過するまで、ヒータ150の出力を所定値にすることによって、時間をかけて根菜などを中まで柔らかくなるように煮付けることができる。
【0040】
<しみ込みコース>
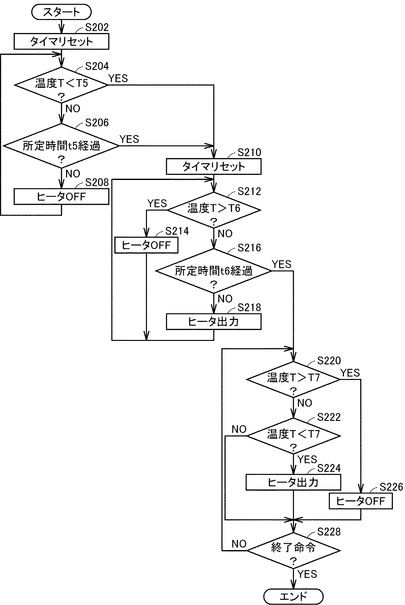
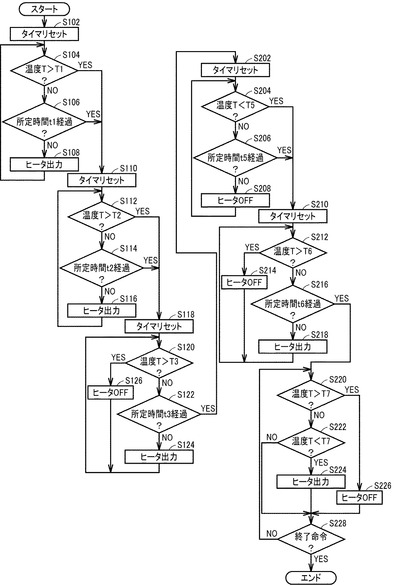
次に、しみ込みコースにおけるマイクロコンピュータ110の動作について説明する。図5は、しみ込みコースにおけるマイクロコンピュータ110のシーケンスを示すイメージ図である。図6は、しみ込みコースにおけるマイクロコンピュータ110の処理手順を示すフローチャートである。
【0041】
マイクロコンピュータ110は、操作パネル120を介して、ユーザから「しみ込みコース」へ移行するための命令を受け付ける。マイクロコンピュータ110のマイクロプロセッサは、当該命令を受け付けると、メモリのプログラム(図5に記載のシーケンス)に基づいて図6に記載のしみ込み処理をスタートする。
【0042】
図5および図6を参照して、マイクロコンピュータ110は、時計160のタイマをリセットする(ステップS202)。マイクロコンピュータ110は、温度センサ130から測定温度Tを取得する。マイクロコンピュータ110は、測定温度Tが、しみ込み移行温度T5よりも小さいか否かを判断する(ステップS204)。測定温度Tが、しみ込み移行温度T5よりも小さい場合(ステップS204にてYESである場合)、マイクロコンピュータ110は、ステップS210からの処理を実行する。
【0043】
測定温度Tが、しみ込み移行温度T5以上である場合(ステップS204にてNOである場合)、マイクロコンピュータ110は、時計160を参照して、しみ込み時間t5が経過したか否かを判断する(ステップS206)。しみ込み時間t5が経過していない場合(ステップS206にてNOである場合)、マイクロコンピュータ110は、ドライバ140を介して、ヒータ150をOFFする(ステップS208)。マイクロコンピュータ110は、ステップS204からの処理を繰り返す。
【0044】
しみ込み時間t5が経過した場合(ステップS206にてYESである場合)、マイクロコンピュータ110は、時計160のタイマをリセットする(ステップS210)。マイクロコンピュータ110は、温度センサ130から測定温度Tを取得する。マイクロコンピュータ110は、測定温度Tが、温調温度T6よりも大きいか否かを判断する(ステップS212)。測定温度Tが、温調温度T6よりも大きい場合(ステップS212にてYESである場合)、マイクロコンピュータ110は、ドライバ140を介して、ヒータ150をOFFする(ステップS214)。マイクロコンピュータ110は、ステップS212からの処理を繰り返す。
【0045】
測定温度Tが、温調温度T6以下である場合(ステップS212にてNOである場合)、マイクロコンピュータ110は、時計160を参照して、温調時間t6が経過したか否かを判断する(ステップS216)。温調時間t6が経過していない場合(ステップS216にてNOである場合)、マイクロコンピュータ110は、ドライバ140を介して、ヒータ150の出力を所定値にする(ステップS218)。マイクロコンピュータ110は、ステップS212からの処理を繰り返す。
【0046】
温調時間t6が経過した場合(ステップS216にてYESである場合)、マイクロコンピュータ110は、温度センサ130から測定温度Tを取得する。マイクロコンピュータ110は、測定温度Tが、保温温度T7よりも大きいか否かを判断する(ステップS220)。測定温度Tが、保温温度T7よりも大きい場合(ステップS220にてYESである場合)、マイクロコンピュータ110は、ドライバ140を介して、ヒータ150をOFFする(ステップS226)。マイクロコンピュータ110は、ステップS228からの処理を実行する。
【0047】
測定温度Tが、保温温度T7より大きくない場合(ステップS220にてNOである場合)、マイクロコンピュータ110は、測定温度Tが、保温温度T7よりも小さいか否かを判断する(ステップS222)。測定温度Tが、保温温度T7よりも小さい場合(ステップS222にてYESである場合)、マイクロコンピュータ110は、ドライバ140を介して、ヒータ150の出力を所定値にする(ステップS224)。マイクロコンピュータ110は、ステップS228からの処理を実行する。
【0048】
測定温度Tが、保温温度T7よりも小さくない場合(ステップS222にてNOである場合)、マイクロコンピュータ110は、操作パネル120を介して、ユーザからしみ込みコースの終了命令を受け付けたか否かを判断する(ステップS228)。ユーザからしみ込みコースの終了命令を受け付けていない場合(ステップS228にてNOである場合)、ステップS220からの処理を繰り返す。一方、ユーザからしみ込みコースの終了命令を受け付けた場合(ステップS228にてYESである場合)、マイクロコンピュータ110は、しみ込み処理を終了する。
【0049】
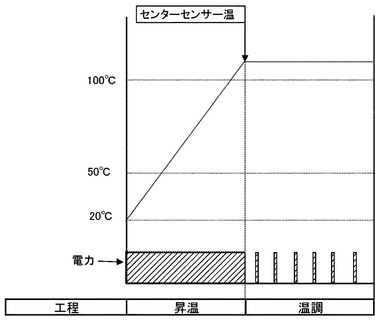
このように、本実施の形態に係る電気調理器100は、ステップS202からステップS208においてヒータ150をOFFするため、煮物に味がしみ込み易くなる。また、電気調理器100は、ステップS210からステップS218において、温度センサ130の測定温度を温調温度T6以上に維持するため、煮物に味がしみ込んだ後、所定時間t6の間、煮物が食べるのに適した温度に維持される。
【0050】
なお、本実施の形態に係る電気調理器100は、ヒータ150をOFFすることによって、食材や鍋200の温度を下げているが、このような形態に限定されるものではない。たとえば、電気調理器100は、ヒータ150の出力を弱めることによって、本実施の形態よりも時間をかけて食材や鍋200の温度を下げてよい。あるいは、電気調理器100は、別途、食材や鍋200を冷却するための機構を有し、当該機構を利用することによって、本実施の形態よりも短時間で食材や鍋200の温度を下げてよい。
【0051】
<煮込み・しみ込みコース>
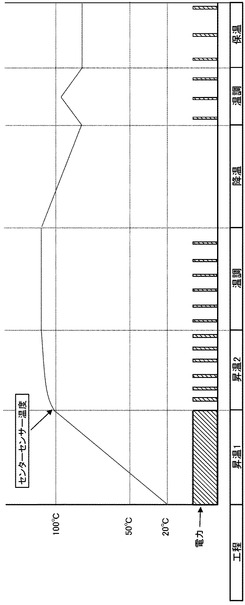
次に、煮込み・しみ込みコースにおけるマイクロコンピュータ110の動作について説明する。図7は、煮込み・しみ込みコースにおけるマイクロコンピュータ110のシーケンスを示すイメージ図である。図8は、煮込み・しみ込みコースにおけるマイクロコンピュータ110の処理手順を示すフローチャートである。
【0052】
マイクロコンピュータ110は、操作パネル120を介して、ユーザから「煮込み・しみ込みコース」へ移行するための命令を受け付ける。マイクロコンピュータ110のマイクロプロセッサは、当該命令を受け付けると、メモリのプログラム(図7に記載のシーケンス)に基づいて図8に記載の煮込み・しみ込み処理をスタートする。
【0053】
図7および図8を参照して、マイクロコンピュータ110は、煮込み・しみ込み処理として、図3および図4に記載の煮込み処理に続いて、図5および図6に記載のしみ込み処理を実行する。より詳細には、マイクロコンピュータ110は、図3および図4に記載の煮込み処理のうち、保温処理(ステップS122〜ステップS136)の代わりに、図5および図6に記載のしみ込み処理(ステップS202からステップS228)を実行する。
【0054】
すなわち、マイクロコンピュータ110は、煮込み処理の温調が終了すると、保温処理を実行することなく、ヒータ150をOFFすることによって自動的にしみ込み処理を開始する。そして、マイクロコンピュータ110は、しみ込み処理が終了すると、自動的に、煮物を食べごろの温度に一旦維持してから当該煮物を保温する。
【0055】
図7に示すように、本実施の形態に係る電気調理器100では、従来よりも、煮物に味がしみ込み易くなる。
【0056】
<鍋物(強)コース>
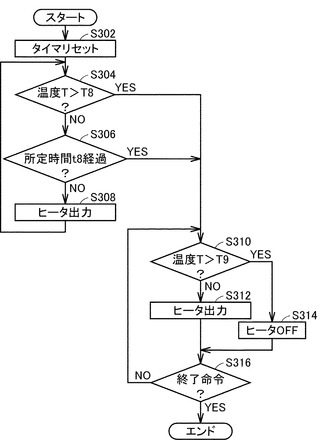
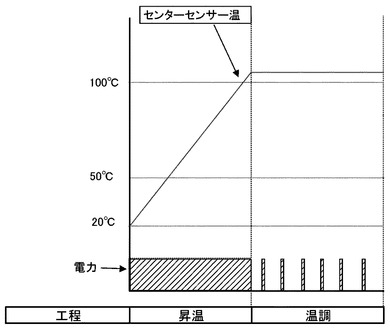
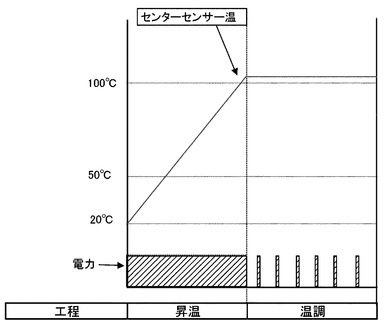
次に、鍋物(強)コースにおけるマイクロコンピュータ110の動作について説明する。図9は、鍋物(強)コースにおけるマイクロコンピュータ110のシーケンスを示すイメージ図である。図10は、鍋物(強)コースにおけるマイクロコンピュータ110の処理手順を示すフローチャートである。
【0057】
マイクロコンピュータ110は、操作パネル120を介して、ユーザから「鍋物(強)コース」へ移行するための命令を受け付ける。マイクロコンピュータ110のマイクロプロセッサは、当該命令を受け付けると、メモリのプログラム(図9に記載のシーケンス)に基づいて図10に記載の鍋物(強)処理をスタートする。
【0058】
図9および図10を参照して、マイクロコンピュータ110は、時計160のタイマをリセットする(ステップS302)。マイクロコンピュータ110は、温度センサ130から測定温度Tを取得する。マイクロコンピュータ110は、測定温度Tが、第1の鍋物移行温度T8よりも大きいか否かを判断する(ステップS304)。測定温度Tが、第1の鍋物移行温度T8よりも大きい場合(ステップS304にてYESである場合)、マイクロコンピュータ110は、ステップS310からの処理を実行する。
【0059】
測定温度Tが、第1の鍋物移行温度T8以下である場合(ステップS304にてNOである場合)、マイクロコンピュータ110は、時計160を参照して、第1の鍋物時間t8が経過したか否かを判断する(ステップS306)。第1の鍋物時間t8が経過していない場合(ステップS306にてNOである場合)、マイクロコンピュータ110は、ドライバ140を介して、ヒータ150の出力を最大にする(ステップS308)。マイクロコンピュータ110は、ステップS304からの処理を繰り返す。
【0060】
なお、図9のシーケンスに厳密に従って、第1の鍋物時間t8を、何分間に設定してもよい。この場合は、第1の鍋物時間t8が経過した場合(ステップS306にてYESである場合)、マイクロコンピュータ110は、再度、ステップS302からステップS308と同様の処理を繰り返す。
【0061】
第1の鍋物時間t8が経過した場合(ステップS306にてYESである場合)、マイクロコンピュータ110は、温度センサ130から測定温度Tを取得する。マイクロコンピュータ110は、測定温度Tが、温調温度T9よりも大きいか否かを判断する(ステップS310)。測定温度Tが、温調温度T9以下である場合(ステップS310にてNOである場合)、マイクロコンピュータ110は、ドライバ140を介して、ヒータ150の出力を所定値にする(ステップS312)。マイクロコンピュータ110は、ステップS316からの処理を実行する。
【0062】
測定温度Tが、温調温度T9よりも大きい場合(ステップS310にてYESである場合)、マイクロコンピュータ110は、ドライバ140を介して、ヒータ150をOFFする(ステップS314)。マイクロコンピュータ110は、操作パネル120を介して、ユーザから鍋物(強)コースの終了命令を受け付けたか否かを判断する(ステップS316)。
【0063】
ユーザから鍋物(強)コースの終了命令を受け付けていない場合(ステップS316にてNOである場合)、ステップS310からの処理を繰り返す。ユーザから鍋物(強)コースの終了命令を受け付けた場合(ステップS316にてYESである場合)、マイクロコンピュータ110は、鍋物処理を終了する。
【0064】
<鍋物(中)コース>
次に、鍋物(中)コースにおけるマイクロコンピュータ110の動作について説明する。図11は、鍋物(中)コースにおけるマイクロコンピュータ110のシーケンスを示すイメージ図である。
【0065】
マイクロコンピュータ110は、操作パネル120を介して、ユーザから「鍋物(中)コース」へ移行するための命令を受け付ける。マイクロコンピュータ110のマイクロプロセッサは、当該命令を受け付けると、メモリのプログラム(図11に記載のシーケンス)に基づいて図10に記載の鍋物(中)処理をスタートする。
【0066】
すなわち、鍋物(中)コースにおけるマイクロコンピュータ110の動作は、図10のそれと同様であるため、ここでは説明を繰り返さない。なお、図9および図11に示すように、鍋物(中)コースにおける鍋物移行温度T8と温調温度T9は、それぞれ、鍋物(強)コースにおける移行温度T8と温調温度T9よりも低い。鍋物(中)コースにおける鍋物時間t8および温調時間t9は、それぞれ、鍋物(強)コースにおける鍋物時間t8および温調時間t9と同じである。
【0067】
<鍋物(弱)コース>
次に、鍋物(弱)コースにおけるマイクロコンピュータ110の動作について説明する。図12は、鍋物(弱)コースにおけるマイクロコンピュータ110のシーケンスを示すイメージ図である。
【0068】
マイクロコンピュータ110は、操作パネル120を介して、ユーザから「鍋物(弱)コース」へ移行するための命令を受け付ける。マイクロコンピュータ110のマイクロプロセッサは、当該命令を受け付けると、メモリのプログラム(図12に記載のシーケンス)に基づいて図10に記載の鍋物(弱)処理をスタートする。
【0069】
すなわち、鍋物(弱)コースにおけるマイクロコンピュータ110の動作は、図10のそれと同様であるため、ここでは説明を繰り返さない。より詳細には、図9,図11,図12に示すように、鍋物(弱)コースにおける鍋物移行温度T8と温調温度T9は、それぞれ、鍋物(中)コースにおける鍋物移行温度T8と温調温度T9よりも低い。鍋物(弱)コースにおける鍋物時間t8と温調時間t9は、それぞれ、鍋物(中)コースにおける鍋物時間t8と温調時間t9と同じである。
【0070】
<鍋物(保温)コース>
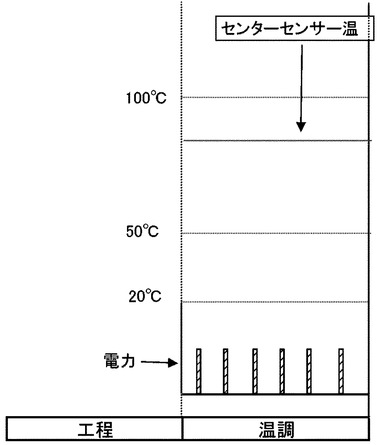
次に、鍋物(保温)コースにおけるマイクロコンピュータ110の動作について説明する。図13は、鍋物(保温)コースにおけるマイクロコンピュータ110のシーケンスを示すイメージ図である。
【0071】
マイクロコンピュータ110は、操作パネル120を介して、ユーザから「鍋物(保温)コース」へ移行するための命令を受け付ける。マイクロコンピュータ110のマイクロプロセッサは、当該命令を受け付けると、メモリのプログラム(図13に記載のシーケンス)に基づいて鍋物(保温)処理をスタートする。より詳細には、図13および図4のステップS128〜ステップS136を参照して、マイクロコンピュータ110は、煮込みコースと同様に、鍋物(保温)処理を実行する。
【0072】
<揚げ物コース>
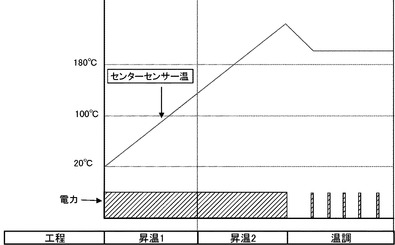
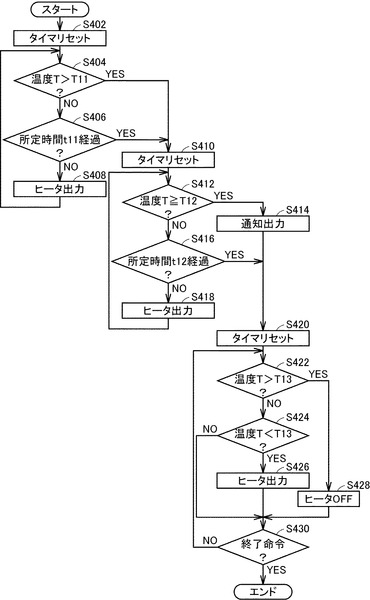
次に、揚げ物コースにおけるマイクロコンピュータ110の動作について説明する。図14は、揚げ物コースにおけるマイクロコンピュータ110のシーケンスを示すイメージ図である。図15は、揚げ物コースにおけるマイクロコンピュータ110の処理手順を示すフローチャートである。
【0073】
マイクロコンピュータ110は、操作パネル120を介して、ユーザから「揚げ物コース」へ移行するための命令を受け付ける。マイクロコンピュータ110のマイクロプロセッサは、当該命令を受け付けると、メモリのプログラム(図14に記載のシーケンス)に基づいて図15に記載の揚げ物処理をスタートする。
【0074】
図14および図15を参照して、マイクロコンピュータ110は、時計160のタイマをリセットする(ステップS402)。マイクロコンピュータ110は、温度センサ130から測定温度Tを取得する。マイクロコンピュータ110は、測定温度Tが、第1の揚げ物移行温度T11よりも大きいか否かを判断する(ステップS404)。測定温度Tが、第1の揚げ物移行温度T11よりも大きい場合(ステップS404にてYESである場合)、マイクロコンピュータ110は、ステップS410からの処理を実行する。
【0075】
測定温度Tが、第1の揚げ物移行温度T11以下である場合(ステップS404にてNOである場合)、マイクロコンピュータ110は、時計160を参照して、第1の揚げ物時間t11が経過したか否かを判断する(ステップS406)。第1の揚げ物時間t11が経過していない場合(ステップS406にてNOである場合)、マイクロコンピュータ110は、ドライバ140を介して、ヒータ150の出力を最大にする(ステップS408)。マイクロコンピュータ110は、ステップS404からの処理を繰り返す。
【0076】
第1の揚げ物時間t11が経過した場合(ステップS406にてYESである場合)、マイクロコンピュータ110は、時計160のタイマをリセットする(ステップS410)。マイクロコンピュータ110は、温度センサ130から測定温度Tを取得する。マイクロコンピュータ110は、測定温度Tが、第2の揚げ物移行温度T12に達したか否かを判断する(ステップS412)。測定温度Tが、第2の揚げ物移行温度T12よりも大きい場合(ステップS412にてYESである場合)、マイクロコンピュータ110は、ディスプレイ121に油の温度が揚げ物に適した温度に達したことを表示させる(ステップS414)。合わせて、マイクロコンピュータ110は、スピーカ123に、通知音を出力させる。マイクロコンピュータ110は、ステップS420からの処理を実行する。なお、本実施の形態に係るマイクロコンピュータ110は、スタート時から第2の揚げ物移行温度T12に達するまで、20℃ごとに油の目安の温度をディスプレイ121に表示させる。
【0077】
測定温度Tが、第2の揚げ物移行温度T12以下である場合(ステップS412にてNOである場合)、マイクロコンピュータ110は、時計160を参照して、第2の揚げ物移行時間t12が経過したか否かを判断する(ステップS416)。第2の揚げ物移行時間t12が経過していない場合(ステップS416にてNOである場合)、マイクロコンピュータ110は、ドライバ140を介して、ヒータ150の出力を最大にする(ステップS418)。マイクロコンピュータ110は、ステップS412からの処理を繰り返す。
【0078】
第2の揚げ物移行時間t12が経過した場合(ステップS416にてYESである場合)、マイクロコンピュータ110は、時計160のタイマをリセットする(ステップS420)。マイクロコンピュータ110は、温度センサ130から測定温度Tを取得する。マイクロコンピュータ110は、測定温度Tが、温調温度T13よりも大きいか否かを判断する(ステップS422)。測定温度Tが、温調温度T13よりも大きい場合(ステップS422にてYESである場合)、マイクロコンピュータ110は、ドライバ140を介して、ヒータ150をOFFする(ステップS428)。マイクロコンピュータ110は、ステップS430からの処理を実行する。
【0079】
測定温度Tが、温調温度T13よりも大きくない場合(ステップS422にてNOである場合)、マイクロコンピュータ110は、測定温度Tが、温調温度T13未満であるか否かを判断する(ステップS424)。測定温度Tが、温調温度T13未満である場合(ステップS424にてYESである場合)、マイクロコンピュータ110は、ヒータ150の出力を最大値にする(ステップS426)。マイクロコンピュータ110は、ステップS430からの処理を実行する。
【0080】
測定温度Tが、温調温度T13未満でない場合(ステップS424にてNOである場合)、マイクロコンピュータ110は、操作パネル120を介して、ユーザから揚げ物コースの終了命令を受け付けたか否かを判断する(ステップS430)。
【0081】
ユーザから揚げ物コースの終了命令を受け付けていない場合(ステップS430にてNOである場合)、マイクロコンピュータ110は、ステップS422からの処理を繰り返す。ユーザから揚げ物コースの終了命令を受け付けた場合(ステップS430にてYESである場合)、マイクロコンピュータ110は、揚げ物処理を終了する。
【0082】
このように、本実施の形態に係る電気調理器100は、鍋200の下方に配置される温度センサ130による測定結果が目標温度よりも高い温度に達したときに、ユーザに油の温度が目標温度に達した旨を通知する。これによって、電気調理器100は、油の温度に関するより正確な情報を早く出力することができるようになる。また、本実施の形態に係る電気調理器100は、鍋200の下方に配置される温度センサ130による測定結果が目標温度よりも高い温度で温調する。これによって、電気調理器100は、油をより適切な温度に保つことができる。
【符号の説明】
【0083】
100 電気調理器、110 マイクロコンピュータ、120 操作パネル、121 ディスプレイ、122 ボタン、123 スピーカ、130 温度センサ、140 ドライバ、150 ヒータ、160 時計、200 鍋、250 蓋。
【技術分野】
【0001】
本発明は、電気的に鍋を加熱することが可能な電気調理器に関し、特に制御手段によって各種の調理処理を実行することが可能な電気調理器に関する。
【背景技術】
【0002】
電気的に鍋を加熱するための電気調理器が知られている。このような電気調理器の中には、制御手段がヒータを制御することによって、食材を煮込むための煮込み処理や、食材に味をしみ込ませるためのしみ込み処理を実行可能なものがある。
【0003】
たとえば、特許文献1には、電気調理器が開示されている。特許文献1によると、電気調理器は、煮物類を行う煮込みモードと、煮込みモードを選択する選択手段とを備える。電気調理器は、煮込みモードの選択により、所定の第1の温度まで加熱した後、第1の温度よりも低い第2の温度に所定時間維持することを含む煮込みモードにて加熱手段を制御する煮込み制御手段を備える。
【0004】
また、特許文献2には、電気圧力鍋が開示されている。特許文献2によると、電気圧力鍋は、耐圧構造の圧力鍋と、該圧力鍋内を加熱昇圧する加熱手段と、該加熱手段による内鍋内の加熱昇圧状態を制御する制御手段とを備える。電気圧力鍋は、上記圧力鍋内の温度が所定の温度よりも高い第1の温度付近の高圧状態で加熱調理する高圧調理工程と、上記高圧調理工程が終了した後、上記圧力鍋内の温度が、上記所定の温度よりも低い第2の温度付近で煮込み調理する煮込み調理工程との少なくとも2組の調理工程が連続する自動煮込み調理メニューを有する。上記制御手段は、所定のメニュー選択手段により上記自動煮込み調理メニューが選択されると、上記圧力調理工程と煮込み調理工程の各々に応じて予じめ設定された加熱出力又は加熱時間で上記加熱手段を適切に制御する。
【0005】
また、特許文献3にも、電気調理器が開示されている。特許文献3によると、電気調理器は、煮物類を行う煮込みモードと、煮込みモードを選択する選択手段とを備える。電気調理器は、煮込みモードの選択により、所定の初期加熱温度まで初期加熱した後、それよりも低い温度に低温加熱する煮込みモードにて加熱手段を制御する煮込み制御手段を備える。初期加熱の過程で煮込み材料の調理進行度を判定し、この判定結果に基づき初期加熱温度への到達時に所定の調理進行度を満足するよう加熱手段の加熱出力を制御する。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2005−296366号公報
【特許文献2】特開2004−261476号公報
【特許文献3】特開2005−296247号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
煮物は温度が下がるときに味がしみ込んでいく。そのため、煮物を作る際には、煮込み処理だけでなく、味をしみ込ませるためのしみ込み処理も実行することが好ましい。しかしながら、ユーザが自身で煮物の加熱を停止するだけでは、味をしみ込ませることはできても、煮物の温度が食するには低すぎる温度まで下がってしまう。
【0008】
本発明はある局面に従うと、かかる問題を解決するためになされたものであり、その目的は、自動的に、煮物に味をしみ込ませつつ、煮物の温度を食べごろなものに調整することができる装置を提供することである。
【0009】
また、煮魚は短時間で加熱することによってふっくらと仕上げることができる。逆に、根菜は、ゆっくり加熱することによって中まで柔らかく仕上げることができる。しかしながら、煮魚と根菜とが含まれる煮物料理に関しては、煮魚と根菜の両者に適したヒータの制御を行うことが難しい。たとえば、所定の温度に達するまでヒータの出力を大きめに設定し、所定の温度に達した後にヒータの出力を小さめに設定する場合には、当該所定の温度に達するまでに時間がかかり過ぎて煮崩れを起こしてしまう可能性が高くなる。
【0010】
本発明は別の局面に従うと、かかる問題を解決するためになされたものであり、その目的は、煮魚や根菜等の煮物全般に適したヒータの制御が可能な装置を提供することである。
【課題を解決するための手段】
【0011】
この発明のある局面に従うと、電気調理器は、食材が載置される鍋を加熱するためのヒータと、ヒータを制御することによって食材に味をしみ込ませるためのしみ込み処理を実行するための制御手段とを備える。制御手段は、しみ込み処理において、ヒータによる加熱を第1の所定時間停止させる第1のステップと、第1のステップの後に、ヒータを制御することによって鍋を第1の所定温度に向けて加熱する第2のステップと、第1のステップの後に、ヒータを制御することによって鍋を第1の所定温度未満の第2の所定温度に維持させる第3のステップとを実行する。
【0012】
この発明の別の局面に従うと、電気調理器は、食材が載置される鍋を加熱するためのヒータと、ヒータを制御することによって食材を煮込むための煮込み処理を実行するための制御手段とを備える。制御手段は、煮込み処理において、第1の所定時間、第1の所定の出力にてヒータを駆動させる第1のステップと、第1のステップの後に、第2の所定時間、第1の所定の出力未満の第2の所定の出力にてヒータを駆動させる第2のステップと、を実行する。
【0013】
この発明の別の局面に従うと、食材が載置される鍋を加熱するためのヒータを制御することによって食材に味をしみ込ませるためのしみ込み処理方法が提供される。しみ込み処理方法は、ヒータによる加熱を第1の所定時間停止させる第1のステップと、第1のステップの後に、ヒータを制御することによって鍋を第1の所定温度に向けて加熱する第2のステップと、第1のステップの後に、ヒータを制御することによって鍋を第1の所定温度未満の第2の所定温度に維持させる第3のステップとを備える。
【0014】
この発明の別の局面に従うと、食材が載置される鍋を加熱するためのヒータを利用して食材を煮込むための煮込み処理方法が提供される。煮込み処理方法は、第1の所定時間、第1の所定の出力にてヒータを駆動させる第1のステップと、第1のステップの後に、第2の所定時間、第1の所定の出力未満の第2の所定の出力にてヒータを駆動させる第2のステップとを備える。
【発明の効果】
【0015】
以上のように、この発明のある局面によれば、自動的に、煮物に味をしみ込ませつつ、煮物の温度を食べごろなものに調整することができるようになる。また、この発明の別の局面によれば、煮魚や根菜等の煮物全般に適したヒータの制御が可能になる。
【図面の簡単な説明】
【0016】
【図1】本実施の形態に係る電気調理器100を示す外観図である。
【図2】本実施の形態に係る電気調理器100のハードウェア構成を示すブロック図である。
【図3】煮込みコースにおけるマイクロコンピュータ110のシーケンスを示すイメージ図である。
【図4】煮込みコースにおけるマイクロコンピュータ110の処理手順を示すフローチャートである。
【図5】しみ込みコースにおけるマイクロコンピュータ110のシーケンスを示すイメージ図である。
【図6】しみ込みコースにおけるマイクロコンピュータ110の処理手順を示すフローチャートである。
【図7】煮込み・しみ込みコースにおけるマイクロコンピュータ110のシーケンスを示すイメージ図である。
【図8】煮込み・しみ込みコースにおけるマイクロコンピュータ110の処理手順を示すフローチャートである。
【図9】鍋物(強)コースにおけるマイクロコンピュータ110のシーケンスを示すイメージ図である。
【図10】鍋物(強)コースにおけるマイクロコンピュータ110の処理手順を示すフローチャートである。
【図11】鍋物(中)コースにおけるマイクロコンピュータ110のシーケンスを示すイメージ図である。
【図12】鍋物(弱)コースにおけるマイクロコンピュータ110のシーケンスを示すイメージ図である。
【図13】鍋物(保温)コースにおけるマイクロコンピュータ110のシーケンスを示すイメージ図である。
【図14】揚げ物コースにおけるマイクロコンピュータ110のシーケンスを示すイメージ図である。
【図15】揚げ物コースにおけるマイクロコンピュータ110の処理手順を示すフローチャートである。
【発明を実施するための形態】
【0017】
以下、図面を参照しつつ、本発明の実施の形態について説明する。以下の説明では、同一の部品には同一の符号を付してある。それらの名称および機能も同じである。したがって、それらについての詳細な説明は繰り返さない。
【0018】
<電気調理器のハードウェア構成>
まず、電気調理器100の全体構成について説明する。図1は、本実施の形態に係る電気調理器100を示す外観図である。図2は、本実施の形態に係る電気調理器100のハードウェア構成を示すブロック図である。
【0019】
図1および図2を参照して、本実施の形態に係る電気調理器100には、鍋200が載置される。鍋200の内側には、食材が載置される。鍋200の上部には、蓋250が載置される。本実施の形態においては、鍋200と蓋250とが圧着されることによって、鍋200の内側の空間の圧力を大気圧よりも大きくすることができる。
【0020】
電気調理器100は、電気調理器100本体の外面に配置される操作パネル120を含む。操作パネル120は、ディスプレイ121と、ボタン122を含む。操作パネル120は、ユーザによるボタン122操作に対応する命令をマイクロコンピュータ110に入力する。たとえば、ユーザは、ボタン122を操作することによって、電気調理器100を、煮込みコース、しみ込みコース、煮込み・しみ込みコース、保温コース、鍋物(強)コース、鍋物(中)コース、鍋物(弱)コース、鍋物(保温)コース、揚げ物コースに移行させる。ディスプレイ121は、マイクロコンピュータ110からの指令に基づいて、テキストや画像を表示する。
【0021】
電気調理器100は、電気調理器100の外面に配置されるスピーカ123を含む。スピーカ123は、マイクロコンピュータ110からの信号に基づいて、電子音や、音声ガイドなどを出力する。
【0022】
電気調理器100は、鍋200の下面および/または側面の温度を計測するための温度センサ130を含む。温度センサ130は、鍋200の下面および/または側面の温度を測定して、測定結果をマイクロコンピュータ110に入力する。
【0023】
電気調理器100は、鍋200の下面および/または側面に配置され、鍋200の下面および/または側面を加熱するためのヒータ150を含む。ヒータ150は、ドライバ140を介して、マイクロコンピュータ110に接続されている。ドライバ140は、マイクロコンピュータ110からの信号に基づいて、ヒータ150の出力を変更する。本実施の形態においては、マイクロコンピュータ110は、ドライバ140を介して、ヒータ150の出力を多段階(たとえば、レベル0〜レベル16)で制御することができる。
【0024】
電気調理器100は、時計160を含む。時計160は、マイクロコンピュータ110に現在時刻を入力する。時計160は、所定の時点からの経過時間を計測するためのタイマの役割も果たし、マイクロコンピュータ110に当該経過時間も入力する。ただし、時計160の代わりに、単なるタイマを利用してもよい。
【0025】
電気調理器100は、電気調理器100の各部を制御するためのマイクロコンピュータ110を含む。より詳細には、マイクロコンピュータ110は、演算を行うマイクロプロセッサと、プログラムやデータを記憶するメモリなどを含む。マイクロコンピュータ110は、マイクロプロセッサがメモリに記憶されているプログラムを実行することにって、電気調理器100の各部(たとえば、ヒータ150やディスプレイ121など)を制御する。
【0026】
本実施の形態においては、マイクロコンピュータ110は、操作パネル120を介して入力されるユーザ命令に応じて、煮込みコース、しみ込みコース、煮込み・しみ込みコース、保温コース、鍋物(強)コース、鍋物(中)コース、鍋物(弱)コース、鍋物(保温)コース、揚げ物コースへと移行する。以下では、それぞれのコースにおけるマイクロコンピュータ110の動作について詳述する。
【0027】
<煮込みコース>
まず、煮込みコースにおけるマイクロコンピュータ110の動作について説明する。図3は、煮込みコースにおけるマイクロコンピュータ110のシーケンスを示すイメージ図である。図4は、煮込みコースにおけるマイクロコンピュータ110の処理手順を示すフローチャートである。
【0028】
マイクロコンピュータ110は、操作パネル120を介して、ユーザから「煮込みコース」へ移行するための命令を受け付ける。マイクロコンピュータ110のマイクロプロセッサは、当該命令を受け付けると、メモリのプログラム(図3に記載のシーケンスを規定する。)に基づいて図4に記載の煮込み処理をスタートする。
【0029】
図3および図4を参照して、マイクロコンピュータ110は、時計160のタイマをリセットする(ステップS102)。マイクロコンピュータ110は、温度センサ130から測定温度Tを取得する。マイクロコンピュータ110は、測定温度Tが、第1の煮込み移行温度T1よりも大きいか否かを判断する(ステップS104)。測定温度Tが、第1の煮込み移行温度T1よりも大きい場合(ステップS104にてYESである場合)、マイクロコンピュータ110は、ステップS110からの処理を実行する。
【0030】
測定温度Tが、第1の煮込み移行温度T1以下である場合(ステップS104にてNOである場合)、マイクロコンピュータ110は、時計160を参照して、第1の煮込み時間t1が経過したか否かを判断する(ステップS106)。第1の煮込み時間t1が経過していない場合(ステップS106にてNOである場合)、マイクロコンピュータ110は、ドライバ140を介して、ヒータ150の出力を最大にする(ステップS108)。マイクロコンピュータ110は、ステップS104からの処理を繰り返す。
【0031】
第1の煮込み時間t1が経過した場合(ステップS106にてYESである場合)、マイクロコンピュータ110は、時計160のタイマをリセットする(ステップS110)。マイクロコンピュータ110は、温度センサ130から測定温度Tを取得する。マイクロコンピュータ110は、測定温度Tが、第2の煮込み移行温度T2よりも大きいか否かを判断する(ステップS112)。測定温度Tが、第2の煮込み移行温度T2よりも大きい場合(ステップS112にてYESである場合)、マイクロコンピュータ110は、ステップS118からの処理を実行する。
【0032】
測定温度Tが、第2の煮込み移行温度T2以下である場合(ステップS112にてNOである場合)、マイクロコンピュータ110は、時計160を参照して、第2の煮込み時間t2が経過したか否かを判断する(ステップS114)。第2の煮込み時間t2が経過していない場合(ステップS114にてNOである場合)、マイクロコンピュータ110は、ドライバ140を介して、ヒータ150の出力を所定値にする(ステップS116)。マイクロコンピュータ110は、ステップS112からの処理を繰り返す。
【0033】
第2の煮込み時間t2が経過した場合(ステップS114にてYESである場合)、マイクロコンピュータ110は、時計160のタイマをリセットする(ステップS118)。マイクロコンピュータ110は、温度センサ130から測定温度Tを取得する。マイクロコンピュータ110は、測定温度Tが、温調温度T3よりも大きいか否かを判断する(ステップS120)。測定温度Tが、温調温度T3よりも大きい場合(ステップS120にてYESである場合)、マイクロコンピュータ110は、ドライバ140を介して、ヒータ150をOFFする(ステップS126)。マイクロコンピュータ110は、ステップS120からの処理を繰り返す。
【0034】
測定温度Tが、温調温度T3以下である場合(ステップS120にてNOである場合)、マイクロコンピュータ110は、時計160を参照して、温調時間t3が経過したか否かを判断する(ステップS122)。温調時間t3が経過していない場合(ステップS122にてNOである場合)、マイクロコンピュータ110は、ヒータ150の出力を所定値にする(ステップS124)。マイクロコンピュータ110は、ステップS120からの処理を繰り返す。
【0035】
なお、本実施の形態においては、温調時間t3は、ユーザの設定によって変化するものであり、第1および第2の煮込み時間は予め設定されているものとする。より詳細には、マイクロコンピュータ110は、操作パネル120を介して、ユーザから、煮込み処理が開始されてから終了するまでの煮込み処理時間t0の入力を受け付ける。たとえば、マイクロコンピュータ110は、ユーザから処理時間t0が入力されると、以下の数式(1)に基づいて、温調時間t3を計算する。
t3=t0−t1−t2…(1)
【0036】
図4に戻って、温調時間t3が経過した場合(ステップS122にてYESである場合)、マイクロコンピュータ110は、温度センサ130から測定温度Tを取得する。マイクロコンピュータ110は、測定温度Tが、保温温度T4よりも大きいか否かを判断する(ステップS128)。測定温度Tが、保温温度T4よりも大きい場合(ステップS128にてYESである場合)、マイクロコンピュータ110は、ドライバ140を介して、ヒータ150をOFFする(ステップS134)。マイクロコンピュータ110は、ステップS136からの処理を実行する。
【0037】
測定温度Tが、保温温度T4より大きくない場合(ステップS128にてNOである場合)、マイクロコンピュータ110は、測定温度Tが、保温温度T4よりも小さいか否かを判断する(ステップS130)。測定温度Tが、保温温度T4よりも小さい場合(ステップS130にてYESである場合)、マイクロコンピュータ110は、ドライバ140を介して、ヒータ150の出力を所定値にする(ステップS132)。マイクロコンピュータ110は、ステップS136からの処理を実行する。
【0038】
測定温度Tが、保温温度T4よりも小さくない場合(ステップS130にてNOである場合)、マイクロコンピュータ110は、操作パネル120を介して、ユーザから煮込みコースの終了命令を受け付けたか否かを判断する(ステップS136)。ユーザから煮込みコースの終了命令を受け付けていない場合(ステップS136にてNOである場合)、ステップS128からの処理を繰り返す。一方、ユーザから煮込みコースの終了命令を受け付けた場合(ステップS136にてYESである場合)、マイクロコンピュータ110は、煮込み処理を終了する。
【0039】
このように、本実施の形態に係る電気調理器100は、所定時間が経過するまで、ヒータ150の出力を最大にすることによって、短時間の間に魚などをふっくらと仕上げることができる。その後、電気調理器100は、所定時間が経過するまで、ヒータ150の出力を所定値にすることによって、時間をかけて根菜などを中まで柔らかくなるように煮付けることができる。
【0040】
<しみ込みコース>
次に、しみ込みコースにおけるマイクロコンピュータ110の動作について説明する。図5は、しみ込みコースにおけるマイクロコンピュータ110のシーケンスを示すイメージ図である。図6は、しみ込みコースにおけるマイクロコンピュータ110の処理手順を示すフローチャートである。
【0041】
マイクロコンピュータ110は、操作パネル120を介して、ユーザから「しみ込みコース」へ移行するための命令を受け付ける。マイクロコンピュータ110のマイクロプロセッサは、当該命令を受け付けると、メモリのプログラム(図5に記載のシーケンス)に基づいて図6に記載のしみ込み処理をスタートする。
【0042】
図5および図6を参照して、マイクロコンピュータ110は、時計160のタイマをリセットする(ステップS202)。マイクロコンピュータ110は、温度センサ130から測定温度Tを取得する。マイクロコンピュータ110は、測定温度Tが、しみ込み移行温度T5よりも小さいか否かを判断する(ステップS204)。測定温度Tが、しみ込み移行温度T5よりも小さい場合(ステップS204にてYESである場合)、マイクロコンピュータ110は、ステップS210からの処理を実行する。
【0043】
測定温度Tが、しみ込み移行温度T5以上である場合(ステップS204にてNOである場合)、マイクロコンピュータ110は、時計160を参照して、しみ込み時間t5が経過したか否かを判断する(ステップS206)。しみ込み時間t5が経過していない場合(ステップS206にてNOである場合)、マイクロコンピュータ110は、ドライバ140を介して、ヒータ150をOFFする(ステップS208)。マイクロコンピュータ110は、ステップS204からの処理を繰り返す。
【0044】
しみ込み時間t5が経過した場合(ステップS206にてYESである場合)、マイクロコンピュータ110は、時計160のタイマをリセットする(ステップS210)。マイクロコンピュータ110は、温度センサ130から測定温度Tを取得する。マイクロコンピュータ110は、測定温度Tが、温調温度T6よりも大きいか否かを判断する(ステップS212)。測定温度Tが、温調温度T6よりも大きい場合(ステップS212にてYESである場合)、マイクロコンピュータ110は、ドライバ140を介して、ヒータ150をOFFする(ステップS214)。マイクロコンピュータ110は、ステップS212からの処理を繰り返す。
【0045】
測定温度Tが、温調温度T6以下である場合(ステップS212にてNOである場合)、マイクロコンピュータ110は、時計160を参照して、温調時間t6が経過したか否かを判断する(ステップS216)。温調時間t6が経過していない場合(ステップS216にてNOである場合)、マイクロコンピュータ110は、ドライバ140を介して、ヒータ150の出力を所定値にする(ステップS218)。マイクロコンピュータ110は、ステップS212からの処理を繰り返す。
【0046】
温調時間t6が経過した場合(ステップS216にてYESである場合)、マイクロコンピュータ110は、温度センサ130から測定温度Tを取得する。マイクロコンピュータ110は、測定温度Tが、保温温度T7よりも大きいか否かを判断する(ステップS220)。測定温度Tが、保温温度T7よりも大きい場合(ステップS220にてYESである場合)、マイクロコンピュータ110は、ドライバ140を介して、ヒータ150をOFFする(ステップS226)。マイクロコンピュータ110は、ステップS228からの処理を実行する。
【0047】
測定温度Tが、保温温度T7より大きくない場合(ステップS220にてNOである場合)、マイクロコンピュータ110は、測定温度Tが、保温温度T7よりも小さいか否かを判断する(ステップS222)。測定温度Tが、保温温度T7よりも小さい場合(ステップS222にてYESである場合)、マイクロコンピュータ110は、ドライバ140を介して、ヒータ150の出力を所定値にする(ステップS224)。マイクロコンピュータ110は、ステップS228からの処理を実行する。
【0048】
測定温度Tが、保温温度T7よりも小さくない場合(ステップS222にてNOである場合)、マイクロコンピュータ110は、操作パネル120を介して、ユーザからしみ込みコースの終了命令を受け付けたか否かを判断する(ステップS228)。ユーザからしみ込みコースの終了命令を受け付けていない場合(ステップS228にてNOである場合)、ステップS220からの処理を繰り返す。一方、ユーザからしみ込みコースの終了命令を受け付けた場合(ステップS228にてYESである場合)、マイクロコンピュータ110は、しみ込み処理を終了する。
【0049】
このように、本実施の形態に係る電気調理器100は、ステップS202からステップS208においてヒータ150をOFFするため、煮物に味がしみ込み易くなる。また、電気調理器100は、ステップS210からステップS218において、温度センサ130の測定温度を温調温度T6以上に維持するため、煮物に味がしみ込んだ後、所定時間t6の間、煮物が食べるのに適した温度に維持される。
【0050】
なお、本実施の形態に係る電気調理器100は、ヒータ150をOFFすることによって、食材や鍋200の温度を下げているが、このような形態に限定されるものではない。たとえば、電気調理器100は、ヒータ150の出力を弱めることによって、本実施の形態よりも時間をかけて食材や鍋200の温度を下げてよい。あるいは、電気調理器100は、別途、食材や鍋200を冷却するための機構を有し、当該機構を利用することによって、本実施の形態よりも短時間で食材や鍋200の温度を下げてよい。
【0051】
<煮込み・しみ込みコース>
次に、煮込み・しみ込みコースにおけるマイクロコンピュータ110の動作について説明する。図7は、煮込み・しみ込みコースにおけるマイクロコンピュータ110のシーケンスを示すイメージ図である。図8は、煮込み・しみ込みコースにおけるマイクロコンピュータ110の処理手順を示すフローチャートである。
【0052】
マイクロコンピュータ110は、操作パネル120を介して、ユーザから「煮込み・しみ込みコース」へ移行するための命令を受け付ける。マイクロコンピュータ110のマイクロプロセッサは、当該命令を受け付けると、メモリのプログラム(図7に記載のシーケンス)に基づいて図8に記載の煮込み・しみ込み処理をスタートする。
【0053】
図7および図8を参照して、マイクロコンピュータ110は、煮込み・しみ込み処理として、図3および図4に記載の煮込み処理に続いて、図5および図6に記載のしみ込み処理を実行する。より詳細には、マイクロコンピュータ110は、図3および図4に記載の煮込み処理のうち、保温処理(ステップS122〜ステップS136)の代わりに、図5および図6に記載のしみ込み処理(ステップS202からステップS228)を実行する。
【0054】
すなわち、マイクロコンピュータ110は、煮込み処理の温調が終了すると、保温処理を実行することなく、ヒータ150をOFFすることによって自動的にしみ込み処理を開始する。そして、マイクロコンピュータ110は、しみ込み処理が終了すると、自動的に、煮物を食べごろの温度に一旦維持してから当該煮物を保温する。
【0055】
図7に示すように、本実施の形態に係る電気調理器100では、従来よりも、煮物に味がしみ込み易くなる。
【0056】
<鍋物(強)コース>
次に、鍋物(強)コースにおけるマイクロコンピュータ110の動作について説明する。図9は、鍋物(強)コースにおけるマイクロコンピュータ110のシーケンスを示すイメージ図である。図10は、鍋物(強)コースにおけるマイクロコンピュータ110の処理手順を示すフローチャートである。
【0057】
マイクロコンピュータ110は、操作パネル120を介して、ユーザから「鍋物(強)コース」へ移行するための命令を受け付ける。マイクロコンピュータ110のマイクロプロセッサは、当該命令を受け付けると、メモリのプログラム(図9に記載のシーケンス)に基づいて図10に記載の鍋物(強)処理をスタートする。
【0058】
図9および図10を参照して、マイクロコンピュータ110は、時計160のタイマをリセットする(ステップS302)。マイクロコンピュータ110は、温度センサ130から測定温度Tを取得する。マイクロコンピュータ110は、測定温度Tが、第1の鍋物移行温度T8よりも大きいか否かを判断する(ステップS304)。測定温度Tが、第1の鍋物移行温度T8よりも大きい場合(ステップS304にてYESである場合)、マイクロコンピュータ110は、ステップS310からの処理を実行する。
【0059】
測定温度Tが、第1の鍋物移行温度T8以下である場合(ステップS304にてNOである場合)、マイクロコンピュータ110は、時計160を参照して、第1の鍋物時間t8が経過したか否かを判断する(ステップS306)。第1の鍋物時間t8が経過していない場合(ステップS306にてNOである場合)、マイクロコンピュータ110は、ドライバ140を介して、ヒータ150の出力を最大にする(ステップS308)。マイクロコンピュータ110は、ステップS304からの処理を繰り返す。
【0060】
なお、図9のシーケンスに厳密に従って、第1の鍋物時間t8を、何分間に設定してもよい。この場合は、第1の鍋物時間t8が経過した場合(ステップS306にてYESである場合)、マイクロコンピュータ110は、再度、ステップS302からステップS308と同様の処理を繰り返す。
【0061】
第1の鍋物時間t8が経過した場合(ステップS306にてYESである場合)、マイクロコンピュータ110は、温度センサ130から測定温度Tを取得する。マイクロコンピュータ110は、測定温度Tが、温調温度T9よりも大きいか否かを判断する(ステップS310)。測定温度Tが、温調温度T9以下である場合(ステップS310にてNOである場合)、マイクロコンピュータ110は、ドライバ140を介して、ヒータ150の出力を所定値にする(ステップS312)。マイクロコンピュータ110は、ステップS316からの処理を実行する。
【0062】
測定温度Tが、温調温度T9よりも大きい場合(ステップS310にてYESである場合)、マイクロコンピュータ110は、ドライバ140を介して、ヒータ150をOFFする(ステップS314)。マイクロコンピュータ110は、操作パネル120を介して、ユーザから鍋物(強)コースの終了命令を受け付けたか否かを判断する(ステップS316)。
【0063】
ユーザから鍋物(強)コースの終了命令を受け付けていない場合(ステップS316にてNOである場合)、ステップS310からの処理を繰り返す。ユーザから鍋物(強)コースの終了命令を受け付けた場合(ステップS316にてYESである場合)、マイクロコンピュータ110は、鍋物処理を終了する。
【0064】
<鍋物(中)コース>
次に、鍋物(中)コースにおけるマイクロコンピュータ110の動作について説明する。図11は、鍋物(中)コースにおけるマイクロコンピュータ110のシーケンスを示すイメージ図である。
【0065】
マイクロコンピュータ110は、操作パネル120を介して、ユーザから「鍋物(中)コース」へ移行するための命令を受け付ける。マイクロコンピュータ110のマイクロプロセッサは、当該命令を受け付けると、メモリのプログラム(図11に記載のシーケンス)に基づいて図10に記載の鍋物(中)処理をスタートする。
【0066】
すなわち、鍋物(中)コースにおけるマイクロコンピュータ110の動作は、図10のそれと同様であるため、ここでは説明を繰り返さない。なお、図9および図11に示すように、鍋物(中)コースにおける鍋物移行温度T8と温調温度T9は、それぞれ、鍋物(強)コースにおける移行温度T8と温調温度T9よりも低い。鍋物(中)コースにおける鍋物時間t8および温調時間t9は、それぞれ、鍋物(強)コースにおける鍋物時間t8および温調時間t9と同じである。
【0067】
<鍋物(弱)コース>
次に、鍋物(弱)コースにおけるマイクロコンピュータ110の動作について説明する。図12は、鍋物(弱)コースにおけるマイクロコンピュータ110のシーケンスを示すイメージ図である。
【0068】
マイクロコンピュータ110は、操作パネル120を介して、ユーザから「鍋物(弱)コース」へ移行するための命令を受け付ける。マイクロコンピュータ110のマイクロプロセッサは、当該命令を受け付けると、メモリのプログラム(図12に記載のシーケンス)に基づいて図10に記載の鍋物(弱)処理をスタートする。
【0069】
すなわち、鍋物(弱)コースにおけるマイクロコンピュータ110の動作は、図10のそれと同様であるため、ここでは説明を繰り返さない。より詳細には、図9,図11,図12に示すように、鍋物(弱)コースにおける鍋物移行温度T8と温調温度T9は、それぞれ、鍋物(中)コースにおける鍋物移行温度T8と温調温度T9よりも低い。鍋物(弱)コースにおける鍋物時間t8と温調時間t9は、それぞれ、鍋物(中)コースにおける鍋物時間t8と温調時間t9と同じである。
【0070】
<鍋物(保温)コース>
次に、鍋物(保温)コースにおけるマイクロコンピュータ110の動作について説明する。図13は、鍋物(保温)コースにおけるマイクロコンピュータ110のシーケンスを示すイメージ図である。
【0071】
マイクロコンピュータ110は、操作パネル120を介して、ユーザから「鍋物(保温)コース」へ移行するための命令を受け付ける。マイクロコンピュータ110のマイクロプロセッサは、当該命令を受け付けると、メモリのプログラム(図13に記載のシーケンス)に基づいて鍋物(保温)処理をスタートする。より詳細には、図13および図4のステップS128〜ステップS136を参照して、マイクロコンピュータ110は、煮込みコースと同様に、鍋物(保温)処理を実行する。
【0072】
<揚げ物コース>
次に、揚げ物コースにおけるマイクロコンピュータ110の動作について説明する。図14は、揚げ物コースにおけるマイクロコンピュータ110のシーケンスを示すイメージ図である。図15は、揚げ物コースにおけるマイクロコンピュータ110の処理手順を示すフローチャートである。
【0073】
マイクロコンピュータ110は、操作パネル120を介して、ユーザから「揚げ物コース」へ移行するための命令を受け付ける。マイクロコンピュータ110のマイクロプロセッサは、当該命令を受け付けると、メモリのプログラム(図14に記載のシーケンス)に基づいて図15に記載の揚げ物処理をスタートする。
【0074】
図14および図15を参照して、マイクロコンピュータ110は、時計160のタイマをリセットする(ステップS402)。マイクロコンピュータ110は、温度センサ130から測定温度Tを取得する。マイクロコンピュータ110は、測定温度Tが、第1の揚げ物移行温度T11よりも大きいか否かを判断する(ステップS404)。測定温度Tが、第1の揚げ物移行温度T11よりも大きい場合(ステップS404にてYESである場合)、マイクロコンピュータ110は、ステップS410からの処理を実行する。
【0075】
測定温度Tが、第1の揚げ物移行温度T11以下である場合(ステップS404にてNOである場合)、マイクロコンピュータ110は、時計160を参照して、第1の揚げ物時間t11が経過したか否かを判断する(ステップS406)。第1の揚げ物時間t11が経過していない場合(ステップS406にてNOである場合)、マイクロコンピュータ110は、ドライバ140を介して、ヒータ150の出力を最大にする(ステップS408)。マイクロコンピュータ110は、ステップS404からの処理を繰り返す。
【0076】
第1の揚げ物時間t11が経過した場合(ステップS406にてYESである場合)、マイクロコンピュータ110は、時計160のタイマをリセットする(ステップS410)。マイクロコンピュータ110は、温度センサ130から測定温度Tを取得する。マイクロコンピュータ110は、測定温度Tが、第2の揚げ物移行温度T12に達したか否かを判断する(ステップS412)。測定温度Tが、第2の揚げ物移行温度T12よりも大きい場合(ステップS412にてYESである場合)、マイクロコンピュータ110は、ディスプレイ121に油の温度が揚げ物に適した温度に達したことを表示させる(ステップS414)。合わせて、マイクロコンピュータ110は、スピーカ123に、通知音を出力させる。マイクロコンピュータ110は、ステップS420からの処理を実行する。なお、本実施の形態に係るマイクロコンピュータ110は、スタート時から第2の揚げ物移行温度T12に達するまで、20℃ごとに油の目安の温度をディスプレイ121に表示させる。
【0077】
測定温度Tが、第2の揚げ物移行温度T12以下である場合(ステップS412にてNOである場合)、マイクロコンピュータ110は、時計160を参照して、第2の揚げ物移行時間t12が経過したか否かを判断する(ステップS416)。第2の揚げ物移行時間t12が経過していない場合(ステップS416にてNOである場合)、マイクロコンピュータ110は、ドライバ140を介して、ヒータ150の出力を最大にする(ステップS418)。マイクロコンピュータ110は、ステップS412からの処理を繰り返す。
【0078】
第2の揚げ物移行時間t12が経過した場合(ステップS416にてYESである場合)、マイクロコンピュータ110は、時計160のタイマをリセットする(ステップS420)。マイクロコンピュータ110は、温度センサ130から測定温度Tを取得する。マイクロコンピュータ110は、測定温度Tが、温調温度T13よりも大きいか否かを判断する(ステップS422)。測定温度Tが、温調温度T13よりも大きい場合(ステップS422にてYESである場合)、マイクロコンピュータ110は、ドライバ140を介して、ヒータ150をOFFする(ステップS428)。マイクロコンピュータ110は、ステップS430からの処理を実行する。
【0079】
測定温度Tが、温調温度T13よりも大きくない場合(ステップS422にてNOである場合)、マイクロコンピュータ110は、測定温度Tが、温調温度T13未満であるか否かを判断する(ステップS424)。測定温度Tが、温調温度T13未満である場合(ステップS424にてYESである場合)、マイクロコンピュータ110は、ヒータ150の出力を最大値にする(ステップS426)。マイクロコンピュータ110は、ステップS430からの処理を実行する。
【0080】
測定温度Tが、温調温度T13未満でない場合(ステップS424にてNOである場合)、マイクロコンピュータ110は、操作パネル120を介して、ユーザから揚げ物コースの終了命令を受け付けたか否かを判断する(ステップS430)。
【0081】
ユーザから揚げ物コースの終了命令を受け付けていない場合(ステップS430にてNOである場合)、マイクロコンピュータ110は、ステップS422からの処理を繰り返す。ユーザから揚げ物コースの終了命令を受け付けた場合(ステップS430にてYESである場合)、マイクロコンピュータ110は、揚げ物処理を終了する。
【0082】
このように、本実施の形態に係る電気調理器100は、鍋200の下方に配置される温度センサ130による測定結果が目標温度よりも高い温度に達したときに、ユーザに油の温度が目標温度に達した旨を通知する。これによって、電気調理器100は、油の温度に関するより正確な情報を早く出力することができるようになる。また、本実施の形態に係る電気調理器100は、鍋200の下方に配置される温度センサ130による測定結果が目標温度よりも高い温度で温調する。これによって、電気調理器100は、油をより適切な温度に保つことができる。
【符号の説明】
【0083】
100 電気調理器、110 マイクロコンピュータ、120 操作パネル、121 ディスプレイ、122 ボタン、123 スピーカ、130 温度センサ、140 ドライバ、150 ヒータ、160 時計、200 鍋、250 蓋。
【特許請求の範囲】
【請求項1】
食材が載置される鍋を加熱するためのヒータと、
前記ヒータを制御することによって前記食材に味をしみ込ませるためのしみ込み処理を実行するための制御手段とを備え、
前記制御手段は、前記しみ込み処理において、
前記鍋の温度を下げる第1のステップと、
前記第1のステップの後に、前記ヒータを制御することによって前記鍋を第1の所定温度に向けて加熱する第2のステップと、
前記第1のステップの後に、前記ヒータを制御することによって前記鍋を前記第1の所定温度未満の第2の所定温度に維持させる第3のステップとを実行する、電気調理器。
【請求項2】
食材が載置される鍋を加熱するためのヒータと、
前記ヒータを制御することによって前記食材を煮込むための煮込み処理を実行するための制御手段とを備え、
前記制御手段は、前記煮込み処理において、
第1の所定時間、第1の所定の出力にて前記ヒータを駆動させる第1のステップと、
前記第1のステップの後に、第2の所定時間、前記第1の所定の出力未満の第2の所定の出力にて前記ヒータを駆動させる第2のステップとを実行する、電気調理器。
【請求項3】
食材が載置される鍋を加熱するためのヒータを制御することによって前記食材に味をしみ込ませるためのしみ込み処理方法であって、
前記鍋の温度を下げる第1のステップと、
前記第1のステップの後に、前記ヒータを制御することによって前記鍋を第1の所定温度に向けて加熱する第2のステップと、
前記第1のステップの後に、前記ヒータを制御することによって前記鍋を前記第1の所定温度未満の第2の所定温度に維持させる第3のステップとを備える、しみ込み処理方法。
【請求項4】
食材が載置される鍋を加熱するためのヒータを利用して前記食材を煮込むための煮込み処理方法であって、
第1の所定時間、第1の所定の出力にて前記ヒータを駆動させる第1のステップと、
前記第1のステップの後に、第2の所定時間、前記第1の所定の出力未満の第2の所定の出力にて前記ヒータを駆動させる第2のステップとを備える、煮込み処理方法。
【請求項1】
食材が載置される鍋を加熱するためのヒータと、
前記ヒータを制御することによって前記食材に味をしみ込ませるためのしみ込み処理を実行するための制御手段とを備え、
前記制御手段は、前記しみ込み処理において、
前記鍋の温度を下げる第1のステップと、
前記第1のステップの後に、前記ヒータを制御することによって前記鍋を第1の所定温度に向けて加熱する第2のステップと、
前記第1のステップの後に、前記ヒータを制御することによって前記鍋を前記第1の所定温度未満の第2の所定温度に維持させる第3のステップとを実行する、電気調理器。
【請求項2】
食材が載置される鍋を加熱するためのヒータと、
前記ヒータを制御することによって前記食材を煮込むための煮込み処理を実行するための制御手段とを備え、
前記制御手段は、前記煮込み処理において、
第1の所定時間、第1の所定の出力にて前記ヒータを駆動させる第1のステップと、
前記第1のステップの後に、第2の所定時間、前記第1の所定の出力未満の第2の所定の出力にて前記ヒータを駆動させる第2のステップとを実行する、電気調理器。
【請求項3】
食材が載置される鍋を加熱するためのヒータを制御することによって前記食材に味をしみ込ませるためのしみ込み処理方法であって、
前記鍋の温度を下げる第1のステップと、
前記第1のステップの後に、前記ヒータを制御することによって前記鍋を第1の所定温度に向けて加熱する第2のステップと、
前記第1のステップの後に、前記ヒータを制御することによって前記鍋を前記第1の所定温度未満の第2の所定温度に維持させる第3のステップとを備える、しみ込み処理方法。
【請求項4】
食材が載置される鍋を加熱するためのヒータを利用して前記食材を煮込むための煮込み処理方法であって、
第1の所定時間、第1の所定の出力にて前記ヒータを駆動させる第1のステップと、
前記第1のステップの後に、第2の所定時間、前記第1の所定の出力未満の第2の所定の出力にて前記ヒータを駆動させる第2のステップとを備える、煮込み処理方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【公開番号】特開2013−39328(P2013−39328A)
【公開日】平成25年2月28日(2013.2.28)
【国際特許分類】
【出願番号】特願2011−179955(P2011−179955)
【出願日】平成23年8月19日(2011.8.19)
【出願人】(000003702)タイガー魔法瓶株式会社 (509)
【Fターム(参考)】
【公開日】平成25年2月28日(2013.2.28)
【国際特許分類】
【出願日】平成23年8月19日(2011.8.19)
【出願人】(000003702)タイガー魔法瓶株式会社 (509)
【Fターム(参考)】
[ Back to top ]