
電気車用定位置停止制御装置
【課題】車両の低速走行領域でも定位置停止精度を向上させることを達成する。
【解決手段】低速条件指令部10より、第3演算部8へ出力される低速走行パターンと、定電力ブレーキパターン出力部11より第3演算部8へ出力される定電力ブレーキパターンにより最大電気ブレーキ力BF2が低速条件・最大電気ブレーキ力BF21となる。低速条件・最大電気ブレーキ力BF21は、低速領域では、最大電気ブレーキ力BF2よりも低いブレーキ力を使用しているため、低速条件・最大電気ブレーキ力BF21で目標停止位置に停止することが困難な場合は、最大電気ブレーキ力BF21までブレーキ力を上げ、目標停止位置に停止することを可能とする。
【解決手段】低速条件指令部10より、第3演算部8へ出力される低速走行パターンと、定電力ブレーキパターン出力部11より第3演算部8へ出力される定電力ブレーキパターンにより最大電気ブレーキ力BF2が低速条件・最大電気ブレーキ力BF21となる。低速条件・最大電気ブレーキ力BF21は、低速領域では、最大電気ブレーキ力BF2よりも低いブレーキ力を使用しているため、低速条件・最大電気ブレーキ力BF21で目標停止位置に停止することが困難な場合は、最大電気ブレーキ力BF21までブレーキ力を上げ、目標停止位置に停止することを可能とする。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、電気車用定位置停止制御装置に関する。
【背景技術】
【0002】
以下に、従来の定位置停止制御装置の速度パターンの一般的な作成方法について説明する。図6は、従来の定位置停止制御装置の速度パターン図である。
【0003】
図6に示すように、ある速度で走行している走行車両100がS1でブレーキ操作を開始したとすると、目標停止位置であるS0までの速度パターンは102になる。ブレーキ操作開始地点の速度Vsから減速度βで減速したVtまで減速したときの、車両が進んだ距離Lと時間tの関係は次の(1)式、(2)式で表すことができる。
【0004】
Vs2−Vt2=7.2×β×L -----(1)
Vs―Vt=β×t ------(2)
Vs、Vt・・・km/h
β・・・・・・・km・h・s
L・・・・・・・m
例えば、仮に停止まで一定の減速度βで減速したとするとブレーキ操作開始地点から停止までの距離は(1)式のVtを0km/hにすることで得られる。また、時間は(2)のVtを0km/hにすることで得られる。(1)式が示すようにブレーキ開始速度が決まれば停止点までの距離Lは一義的にもとまる。
【0005】
この式が示すように、定位置停止制御ではブレーキ操作開始地点は目標停止地点から減速度を基準に逆引きして作られる位置基準又は時間基準の速度パターンと車両の実速度が交差する点がブレーキ操作開始地点になる。このように運転パターンを作成し、車両に搭載されている電気ブレーキと空気ブレーキを併用して目標停止位置に停止するものが提案されている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2006−74876号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
しかしながら、従来の定位置停止制御装置は、車両速度が10〜20km/h程度まで減速すると電気車の電気ブレーキを終息させ、空気ブレーキを作用させていた。そのため、低速領域の走行車両は空気ブレーキだけで走行車両を停止させていた。空気ブレーキのみで走行車両を停止させようとすると、各車両毎の空気ブレーキ力応答遅れや、一定ブレーキ力指令でも空気ブレーキ力では一定のブレーキ力にならないこと等によって、目標位置への停止に大きなずれが生じる虞があった。
本発明は、上記問題点を解決するためになされたもので、低速領域においても精度の高いブレーキ制御を実行することにより、精度の高い定位置停止を実現できる電気車用定位置停止制御装置を提供することを目的とする。
【課題を解決するための手段】
【0008】
上記を解決するために、本発明による電気車用定位置停止制御装置は、車両が駅の目標停止位置に停止することを制御する制御部へ、前記車両の走行速度が低速領域に入ったことを検知し、低速条件指令を出力する低速条件指令部と、前記低速条件指令部からの低速条件指令受けて、前記車両に搭載されている電気ブレーキが中高速領域の電気ブレーキ力よりも前記低速領域の前記電気ブレーキ力が低いことを有することを特徴としている。
【発明の効果】
【0009】
本発明によれば、低速領域においても精度の高いブレーキ制御を行うことができるので、定位置停止制御を向上させることができる。
【図面の簡単な説明】
【0010】
【図1】本発明の第1の実施形態の制御ブロック図。
【図2】本発明の第1の実施形態の最大電気ブレーキ力パターン図。
【図3】本発明の第1の実施形態の低速領域の最大電気ブレーキ力パターン図。
【図4】本発明の第1の実施形態の低速領域に定電力特性を追加した最大電気ブレーキ力パターン図。
【図5】本発明の第1の実施形態の車両ネットワーク図。
【図6】従来の定位置停止制御装置の速度パターン図。
【発明を実施するための形態】
【0011】
以下、本発明の実施形態について図面を参照して説明する。
【0012】
(第1の実施形態)
図1は、本発明の第1の実施形態の制御ブロック図である。図2は、本発明の第1の実施形態の最大電気ブレーキ力パターン図。である。図3は、本発明の第1の実施形態の低速領域の最大電気ブレーキ力パターン図である。図4は、本発明の第1の実施形態の低速領域に定電力特性を追加した最大電気ブレーキ力パターン図である。図5は、本発明の第1の実施形態の車両ネットワーク図である。以下、図を参照して説明する。
【0013】
(構成)
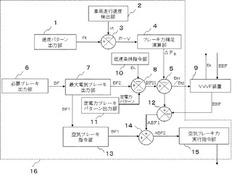
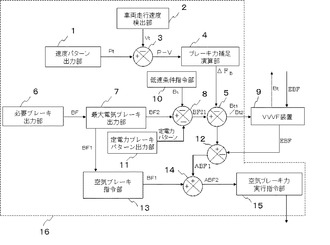
図1に示すように、定位置停止制御部16内には、速度パターン出力部1、車両走行速度検出部2、第1演算部3、ブレーキ力補足演算部4、第2演算部5、必要ブレーキ出力部6、最大電気ブレーキ出力部7、第3演算部8、低速条件指令出力部10、定電力ブレーキパターン出力部11、第4演算部12、空気ブレーキ指令部13、第5演算部14、空気ブレーキ実行指令部15が内蔵されている。またVVVF装置9が、定位置停止制御部16と接続されている。
【0014】
速度パターン出力部1は第1演算部と必要ブレーキ出力1と接続されている。車両走行速度検出部2は、第1演算部3と接続されている。第1演算部3は、速度パターン出力部1、車両走行速度検出部2、ブレーキ力補足演算部4と接続されている。ブレーキ力補足演算部4は、第1演算部3、第2演算部5と接続されている。第2演算部5は、ブレーキ力補足演算部4、第3演算部8、VVVF補足演算部4、VVVF装置9、第4演算部12と接続されている。必要ブレーキ出力部6は、最大ブレーキ出力部7と接続されている。最大電気ブレーキ出力部7は、必要ブレーキ出力部6、第3演算部8と接続されている。第3演算部8は、第2演算部5、最大ブレーキ出力部7、低速条件指令部10、定電力ブレーキパターン出力部11と接続されている。VVVF装置9は、第2演算部5、第4演算部12、またVVVF装置のような電力変換装置(図示しない)と接続されている。低速条件指令部10は、第3演算部8と接続されている。定電力ブレーキパターン出力部11は、第3演算部8と接続されている。第4演算部12は、第2演算部5、VVVF装置9、第5演算部14と接続されている。空気ブレーキ指令部13は、最大電気ブレーキ出力部7、第5演算部14と接続されている。第5演算部14は、第4演算部12、空気ブレーキ指令部13、空気ブレーキ力実行指令部15と接続されている。空気ブレーキ力実行指令部15は、第5演算部14、外部の空気ブレーキ装置(図示しない)と接続されている。
【0015】
(作用)
速度パターン出力部1は、速度パターンをDBとして保有しており、ブレーキ操作開始地点から停止位置までの距離をもとに算出された基準速度パターン(Pt)を速度パターン出力部1で算出する。算出された基準速度パターン(Pt)は、速度パターン出力部1から第1演算部3へ出力される。また、車両の走行速度を検出し、その検出された車両実速度(Vt)を車両走行速度検出部2から第1演算部3へ出力する。第1演算部3、第2演算部5、第3演算部8、第4演算部12、第5演算部14を含む演算部は、他ブロックから入力された値に対して、(+)のセルから入力されたものは(+)が付き、(−)のセルから入力されたものは(−)が付いて演算される。第1演算部3では、基準速度パターン(Pt)が(+)から入力され、車両実速度(Vt)が(−)から入力されているため、(Pt−Vt=P−V)を演算する。つまり、車両の目標速度と実際の走行速度がどのくらい乖離しているか、乖離速度(P−V)を求めている。第1演算部3で求められた(P−V)を、ブレーキ力補足演算部4に出力する。第1演算部3からの出力を受け取ったブレーキ力補足演算部4は、(P−V=ΔFB)を演算し、乖離している速度に必要なブレーキ力である補足ブレーキ力(ΔFB)を算出する。
【0016】
また、必要ブレーキ出力部6では、ブレーキ操作開始地点に対する必要ブレーキ力(BF)が求められる。必要ブレーキ出力部6で求められた必要ブレーキ力(BF)は、必要ブレーキ出力部6から最大電気ブレーキ出力部7へ出力される。最大電気ブレーキ出力部7は、最大電気ブレーキ力(BF2)を第3演算部8に出力し、必要ブレーキ力(BF)から最大電気ブレーキ力(BF2)を差し引いた値である空気ブレーキ力(BF1)を空気ブレーキ指令部13へ出力する。
【0017】
(低速条件)
車両の走行速度が低速の場合、最大電気ブレーキ出力部7から最大電気ブレーキ力(BF2)を(+)のセルから入力した第3演算部8は、さらに、車両走行低速域時を条件に、低速ブレーキパターン(BL)が低速条件指令部10から第3演算部8へ(−)のセルで入力され、また、電気ブレーキの定電力ブレーキパターン(BC)が、定電力ブレーキパターン出力部11から第3演算部8へ(−)のセルから入力される。電力ブレーキの最大値(BF2)と、低速ブレーキパターン(BL)、定電力ブレーキパターン(BC)が入力された第3演算部8は、(BF2−BL―BC=BF21)が演算される。
【0018】
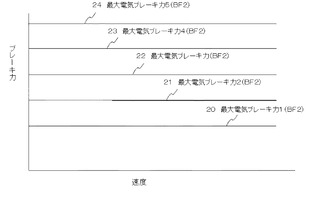
最大電気ブレーキ力(BF2)の特性を表したものが図2である。図2の、最大電気ブレーキ力(BF2)20、最大電気ブレーキ力(BF2)21、最大電気ブレーキ力(BF2)22、最大電気ブレーキ力(BF2)23、最大電気ブレーキ力(BF2)24は、電気ブレーキ力の一例である。電気ブレーキ力はデジタル信号によって、ブレーキ装置に出力されるため、連続的なブレーキ力を有している。
【0019】
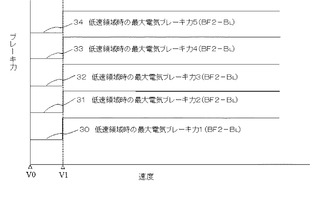
その連続的なブレーキ力に、低速ブレーキパターン(BL)が追加されたブレーキ力を図3に示す。図3に示すように、V0からV1は、車両走行速度の低速領域である。車両の走行速度が低速領域にあるとき、電気ブレーキ力は最大電気ブレーキ力よりも低く設定される。車両走行速度が低速領域において、最大ブレーキ力よりも低く設定された電気ブレーキ力が、低速領域時の最大電気ブレーキ力1(BF2−BL)30、低速領域時の最大電気ブレーキ力1(BF2−BL)31、低速領域時の最大電気ブレーキ力1(BF2−BL)32、低速領域時の最大電気ブレーキ力1(BF2−BL)33、低速領域時の最大電気ブレーキ力1(BF2−BL)34である。低速領域時の最大電気ブレーキ力1(BF2−BL)は、例えば、車両の低速領域走行を条件に、車両の最大電気ブレーキ力(BF2)×80%の値である。車両の最大電気ブレーキ力(BF2)×80%の値から、必要なブレーキ力に応じて、車両の最大電気ブレーキ力(BF2)×80%〜100%の値でブレーキ力を調整することが可能である。
【0020】
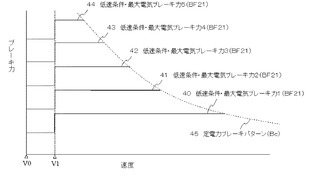
また上記連続的なブレーキ力に、定電力ブレーキパターン(BC)が追加されたブレーキ力を図4に示す。定電力ブレーキパターン(Bc)は、図3のブレーキ力パターンに電気ブレーキの電気的特性(ある一定以上の速度になると電気ブレーキ力が消滅する)と各電気ブレーキ力に対応させて表したものである。つまり、実際に使用可能な電気ブレーキ力を表した低速条件・最大電気ブレーキ力(BF21)が図4となる。第3演算部8では、低速条件・最大電気ブレーキ力(BF21)が演算される。
【0021】
補足ブレーキ力(ΔFB)がブレーキ力補足演算部4から、第2演算部5の(−)のセルに入力され、低速条件・最大電気ブレーキ力(BF21)が第3演算部8から(+)のセルに入力された第2演算部5は、(BF21−ΔFB=Bt1)が演算される。車両ブレーキ力(Bt1)は、第2演算部5からVVVF装置9及び第4演算部12の(+)セルへ出力される。車両ブレーキ力(Bt1)が入力されたVVVF装置9は車両ブレーキ力(Bt1)を出力し、車両ブレーキ力(Bt1)が実行される。車両ブレーキ力(Bt1)が実行されると、VVVF装置9へ車両実行・電気ブレーキ力(EBF)がフィードバックされる。フィードバックされた車両実行・電気ブレーキ力(EBF)は、VVVF装置9から第4演算部12の(−)セルへ出力される。(+)セルから車両ブレーキ力(Bt1)が、(―)のセルから車両実行・電気ブレーキ力(EBF)が入力された第4演算部12は、(Bt1―EBF=ABF1)が演算される。
【0022】
(中高速条件の場合)
中高速条件の場合、最大電気ブレーキ出力部7から最大値の電気ブレーキ力(BF2)を(+)のセルから入力した第3演算部8は、車両走行低速域時を条件に入力される、低速ブレーキパターン(BL)は低速条件指令部10から第3演算部8へ(−)のセルで入力されず、また、電気ブレーキの定電力ブレーキパターン(BC)が、定電力ブレーキパターン出力部11から第3演算部8へ(−)のセルから入力される。電力ブレーキの最大値(BF2)と定電力ブレーキパターン(BC)が入力された第3演算部8は、(BF2―BC=BF22)が演算される。中高速条件・最大電気ブレーキ力(BF22)は、第3演算部8から第2演算部5の(+)のセルへ出力される。
【0023】
補足ブレーキ力(ΔFB)がブレーキ力補足演算部4から、第2演算部5の(−)のセルに入力され、中高速条件・最大電気ブレーキ力(BF22)が第3演算部8から(+)のセルに入力された第2演算部5は、(BF22−ΔFB=Bt2)が演算される。車両ブレーキ力(Bt2)は、第2演算部5からVVVF装置9及び第4演算部12の(+)セルへ出力される。車両ブレーキ力(Bt2)が入力されたVVVF装置9は、車両ブレーキ力(Bt2)を出力し、車両ブレーキ力(Bt2)が実行される。車両ブレーキ力(Bt1)が実行されると、VVVF装置9へ車両実行・電気ブレーキ力(EBF)がフィードバックされる。フィードバックされた車両実行・電気ブレーキ力(EBF)は、VVVF装置9から第4演算部12の(−)セルへ出力される。(+)セルから車両ブレーキ力(Bt2)が、(―)のセルから車両実行・電気ブレーキ力(EBF)が入力された第4演算部12は、(Bt2―EBF=ABF1)が演算される。
【0024】
必要補足ブレーキ力(ABF1)必要補足ブレーキ力(ABF1)は、指令した電気ブレーキ力と実行した電気ブレーキ力がどれくらい乖離しているかを求めている。演算された必要補足ブレーキ力(ABF1)は、第4演算部12から第5演算部14の(+)セルへ出力される。また、最大電気ブレーキ出力部7から空気ブレーキ指令部13へ入力された空気ブレーキ力(BF1)は、空気ブレーキ指令部13から第5演算部14の(+)セルへ出力される。必要補足ブレーキ力(ABF1)と空気ブレーキ力(BF1)を(+)セルから入力された第5演算部14は、(ABF1+BF1=ABF2)を演算する。電力ブレーキ力で賄うことのできなかった必要ブレーキ力を補うための空気ブレーキ力(ABF2)は、第5演算部14から空気ブレーキ力実行指令部15へ出力される。空気ブレーキ力(ABF2)が入力された空気ブレーキ力実行指令部15は空気ブレーキ装置へ空気ブレーキ力(ABF2)の実行指令を出力する。
【0025】
(効果)
このような構成をもつ電気車用定位置停止制御は、低速度領域が電力回生ブレーキで制御できるので、停止精度が向上する。また、電気ブレーキ制御は空気ブレーキ制御よりも、車両内に乗車している乗客の乗り心地を改善するため、快適な車両走行が可能となる。また、空気ブレーキを併用する制御システムになっているため、緊急停止が必要な際は、空気ブレーキを使用することも可能であり、そのため、車両走行の安全性も確保することができる。
【0026】
また、本実施形態の低速領域における電気ブレーキ力パターンは、中高速領域にも適応可能であり、その際は中高速領域からの精度の良い制御が可能である。
【符号の説明】
【0027】
1 速度パターン出力部
2 車両走行速度検出部
3 第1演算部
4 ブレーキ力補足演算部
5 第2演算部
6 必要ブレーキ出力部
7 最大電気ブレーキ出力部
8 第3演算部
9 VVVF装置
10 低速条件指令部
11 定電力ブレーキパターン出力部
12 第4演算部
13 空気ブレーキ指令部
14 第5演算部
15 空気ブレーキ力実行指令部
16 定位置停止制御部
【技術分野】
【0001】
本発明は、電気車用定位置停止制御装置に関する。
【背景技術】
【0002】
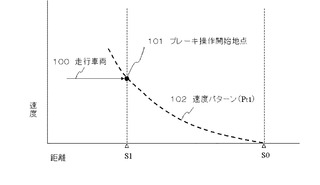
以下に、従来の定位置停止制御装置の速度パターンの一般的な作成方法について説明する。図6は、従来の定位置停止制御装置の速度パターン図である。
【0003】
図6に示すように、ある速度で走行している走行車両100がS1でブレーキ操作を開始したとすると、目標停止位置であるS0までの速度パターンは102になる。ブレーキ操作開始地点の速度Vsから減速度βで減速したVtまで減速したときの、車両が進んだ距離Lと時間tの関係は次の(1)式、(2)式で表すことができる。
【0004】
Vs2−Vt2=7.2×β×L -----(1)
Vs―Vt=β×t ------(2)
Vs、Vt・・・km/h
β・・・・・・・km・h・s
L・・・・・・・m
例えば、仮に停止まで一定の減速度βで減速したとするとブレーキ操作開始地点から停止までの距離は(1)式のVtを0km/hにすることで得られる。また、時間は(2)のVtを0km/hにすることで得られる。(1)式が示すようにブレーキ開始速度が決まれば停止点までの距離Lは一義的にもとまる。
【0005】
この式が示すように、定位置停止制御ではブレーキ操作開始地点は目標停止地点から減速度を基準に逆引きして作られる位置基準又は時間基準の速度パターンと車両の実速度が交差する点がブレーキ操作開始地点になる。このように運転パターンを作成し、車両に搭載されている電気ブレーキと空気ブレーキを併用して目標停止位置に停止するものが提案されている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2006−74876号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
しかしながら、従来の定位置停止制御装置は、車両速度が10〜20km/h程度まで減速すると電気車の電気ブレーキを終息させ、空気ブレーキを作用させていた。そのため、低速領域の走行車両は空気ブレーキだけで走行車両を停止させていた。空気ブレーキのみで走行車両を停止させようとすると、各車両毎の空気ブレーキ力応答遅れや、一定ブレーキ力指令でも空気ブレーキ力では一定のブレーキ力にならないこと等によって、目標位置への停止に大きなずれが生じる虞があった。
本発明は、上記問題点を解決するためになされたもので、低速領域においても精度の高いブレーキ制御を実行することにより、精度の高い定位置停止を実現できる電気車用定位置停止制御装置を提供することを目的とする。
【課題を解決するための手段】
【0008】
上記を解決するために、本発明による電気車用定位置停止制御装置は、車両が駅の目標停止位置に停止することを制御する制御部へ、前記車両の走行速度が低速領域に入ったことを検知し、低速条件指令を出力する低速条件指令部と、前記低速条件指令部からの低速条件指令受けて、前記車両に搭載されている電気ブレーキが中高速領域の電気ブレーキ力よりも前記低速領域の前記電気ブレーキ力が低いことを有することを特徴としている。
【発明の効果】
【0009】
本発明によれば、低速領域においても精度の高いブレーキ制御を行うことができるので、定位置停止制御を向上させることができる。
【図面の簡単な説明】
【0010】
【図1】本発明の第1の実施形態の制御ブロック図。
【図2】本発明の第1の実施形態の最大電気ブレーキ力パターン図。
【図3】本発明の第1の実施形態の低速領域の最大電気ブレーキ力パターン図。
【図4】本発明の第1の実施形態の低速領域に定電力特性を追加した最大電気ブレーキ力パターン図。
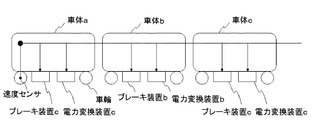
【図5】本発明の第1の実施形態の車両ネットワーク図。
【図6】従来の定位置停止制御装置の速度パターン図。
【発明を実施するための形態】
【0011】
以下、本発明の実施形態について図面を参照して説明する。
【0012】
(第1の実施形態)
図1は、本発明の第1の実施形態の制御ブロック図である。図2は、本発明の第1の実施形態の最大電気ブレーキ力パターン図。である。図3は、本発明の第1の実施形態の低速領域の最大電気ブレーキ力パターン図である。図4は、本発明の第1の実施形態の低速領域に定電力特性を追加した最大電気ブレーキ力パターン図である。図5は、本発明の第1の実施形態の車両ネットワーク図である。以下、図を参照して説明する。
【0013】
(構成)
図1に示すように、定位置停止制御部16内には、速度パターン出力部1、車両走行速度検出部2、第1演算部3、ブレーキ力補足演算部4、第2演算部5、必要ブレーキ出力部6、最大電気ブレーキ出力部7、第3演算部8、低速条件指令出力部10、定電力ブレーキパターン出力部11、第4演算部12、空気ブレーキ指令部13、第5演算部14、空気ブレーキ実行指令部15が内蔵されている。またVVVF装置9が、定位置停止制御部16と接続されている。
【0014】
速度パターン出力部1は第1演算部と必要ブレーキ出力1と接続されている。車両走行速度検出部2は、第1演算部3と接続されている。第1演算部3は、速度パターン出力部1、車両走行速度検出部2、ブレーキ力補足演算部4と接続されている。ブレーキ力補足演算部4は、第1演算部3、第2演算部5と接続されている。第2演算部5は、ブレーキ力補足演算部4、第3演算部8、VVVF補足演算部4、VVVF装置9、第4演算部12と接続されている。必要ブレーキ出力部6は、最大ブレーキ出力部7と接続されている。最大電気ブレーキ出力部7は、必要ブレーキ出力部6、第3演算部8と接続されている。第3演算部8は、第2演算部5、最大ブレーキ出力部7、低速条件指令部10、定電力ブレーキパターン出力部11と接続されている。VVVF装置9は、第2演算部5、第4演算部12、またVVVF装置のような電力変換装置(図示しない)と接続されている。低速条件指令部10は、第3演算部8と接続されている。定電力ブレーキパターン出力部11は、第3演算部8と接続されている。第4演算部12は、第2演算部5、VVVF装置9、第5演算部14と接続されている。空気ブレーキ指令部13は、最大電気ブレーキ出力部7、第5演算部14と接続されている。第5演算部14は、第4演算部12、空気ブレーキ指令部13、空気ブレーキ力実行指令部15と接続されている。空気ブレーキ力実行指令部15は、第5演算部14、外部の空気ブレーキ装置(図示しない)と接続されている。
【0015】
(作用)
速度パターン出力部1は、速度パターンをDBとして保有しており、ブレーキ操作開始地点から停止位置までの距離をもとに算出された基準速度パターン(Pt)を速度パターン出力部1で算出する。算出された基準速度パターン(Pt)は、速度パターン出力部1から第1演算部3へ出力される。また、車両の走行速度を検出し、その検出された車両実速度(Vt)を車両走行速度検出部2から第1演算部3へ出力する。第1演算部3、第2演算部5、第3演算部8、第4演算部12、第5演算部14を含む演算部は、他ブロックから入力された値に対して、(+)のセルから入力されたものは(+)が付き、(−)のセルから入力されたものは(−)が付いて演算される。第1演算部3では、基準速度パターン(Pt)が(+)から入力され、車両実速度(Vt)が(−)から入力されているため、(Pt−Vt=P−V)を演算する。つまり、車両の目標速度と実際の走行速度がどのくらい乖離しているか、乖離速度(P−V)を求めている。第1演算部3で求められた(P−V)を、ブレーキ力補足演算部4に出力する。第1演算部3からの出力を受け取ったブレーキ力補足演算部4は、(P−V=ΔFB)を演算し、乖離している速度に必要なブレーキ力である補足ブレーキ力(ΔFB)を算出する。
【0016】
また、必要ブレーキ出力部6では、ブレーキ操作開始地点に対する必要ブレーキ力(BF)が求められる。必要ブレーキ出力部6で求められた必要ブレーキ力(BF)は、必要ブレーキ出力部6から最大電気ブレーキ出力部7へ出力される。最大電気ブレーキ出力部7は、最大電気ブレーキ力(BF2)を第3演算部8に出力し、必要ブレーキ力(BF)から最大電気ブレーキ力(BF2)を差し引いた値である空気ブレーキ力(BF1)を空気ブレーキ指令部13へ出力する。
【0017】
(低速条件)
車両の走行速度が低速の場合、最大電気ブレーキ出力部7から最大電気ブレーキ力(BF2)を(+)のセルから入力した第3演算部8は、さらに、車両走行低速域時を条件に、低速ブレーキパターン(BL)が低速条件指令部10から第3演算部8へ(−)のセルで入力され、また、電気ブレーキの定電力ブレーキパターン(BC)が、定電力ブレーキパターン出力部11から第3演算部8へ(−)のセルから入力される。電力ブレーキの最大値(BF2)と、低速ブレーキパターン(BL)、定電力ブレーキパターン(BC)が入力された第3演算部8は、(BF2−BL―BC=BF21)が演算される。
【0018】
最大電気ブレーキ力(BF2)の特性を表したものが図2である。図2の、最大電気ブレーキ力(BF2)20、最大電気ブレーキ力(BF2)21、最大電気ブレーキ力(BF2)22、最大電気ブレーキ力(BF2)23、最大電気ブレーキ力(BF2)24は、電気ブレーキ力の一例である。電気ブレーキ力はデジタル信号によって、ブレーキ装置に出力されるため、連続的なブレーキ力を有している。
【0019】
その連続的なブレーキ力に、低速ブレーキパターン(BL)が追加されたブレーキ力を図3に示す。図3に示すように、V0からV1は、車両走行速度の低速領域である。車両の走行速度が低速領域にあるとき、電気ブレーキ力は最大電気ブレーキ力よりも低く設定される。車両走行速度が低速領域において、最大ブレーキ力よりも低く設定された電気ブレーキ力が、低速領域時の最大電気ブレーキ力1(BF2−BL)30、低速領域時の最大電気ブレーキ力1(BF2−BL)31、低速領域時の最大電気ブレーキ力1(BF2−BL)32、低速領域時の最大電気ブレーキ力1(BF2−BL)33、低速領域時の最大電気ブレーキ力1(BF2−BL)34である。低速領域時の最大電気ブレーキ力1(BF2−BL)は、例えば、車両の低速領域走行を条件に、車両の最大電気ブレーキ力(BF2)×80%の値である。車両の最大電気ブレーキ力(BF2)×80%の値から、必要なブレーキ力に応じて、車両の最大電気ブレーキ力(BF2)×80%〜100%の値でブレーキ力を調整することが可能である。
【0020】
また上記連続的なブレーキ力に、定電力ブレーキパターン(BC)が追加されたブレーキ力を図4に示す。定電力ブレーキパターン(Bc)は、図3のブレーキ力パターンに電気ブレーキの電気的特性(ある一定以上の速度になると電気ブレーキ力が消滅する)と各電気ブレーキ力に対応させて表したものである。つまり、実際に使用可能な電気ブレーキ力を表した低速条件・最大電気ブレーキ力(BF21)が図4となる。第3演算部8では、低速条件・最大電気ブレーキ力(BF21)が演算される。
【0021】
補足ブレーキ力(ΔFB)がブレーキ力補足演算部4から、第2演算部5の(−)のセルに入力され、低速条件・最大電気ブレーキ力(BF21)が第3演算部8から(+)のセルに入力された第2演算部5は、(BF21−ΔFB=Bt1)が演算される。車両ブレーキ力(Bt1)は、第2演算部5からVVVF装置9及び第4演算部12の(+)セルへ出力される。車両ブレーキ力(Bt1)が入力されたVVVF装置9は車両ブレーキ力(Bt1)を出力し、車両ブレーキ力(Bt1)が実行される。車両ブレーキ力(Bt1)が実行されると、VVVF装置9へ車両実行・電気ブレーキ力(EBF)がフィードバックされる。フィードバックされた車両実行・電気ブレーキ力(EBF)は、VVVF装置9から第4演算部12の(−)セルへ出力される。(+)セルから車両ブレーキ力(Bt1)が、(―)のセルから車両実行・電気ブレーキ力(EBF)が入力された第4演算部12は、(Bt1―EBF=ABF1)が演算される。
【0022】
(中高速条件の場合)
中高速条件の場合、最大電気ブレーキ出力部7から最大値の電気ブレーキ力(BF2)を(+)のセルから入力した第3演算部8は、車両走行低速域時を条件に入力される、低速ブレーキパターン(BL)は低速条件指令部10から第3演算部8へ(−)のセルで入力されず、また、電気ブレーキの定電力ブレーキパターン(BC)が、定電力ブレーキパターン出力部11から第3演算部8へ(−)のセルから入力される。電力ブレーキの最大値(BF2)と定電力ブレーキパターン(BC)が入力された第3演算部8は、(BF2―BC=BF22)が演算される。中高速条件・最大電気ブレーキ力(BF22)は、第3演算部8から第2演算部5の(+)のセルへ出力される。
【0023】
補足ブレーキ力(ΔFB)がブレーキ力補足演算部4から、第2演算部5の(−)のセルに入力され、中高速条件・最大電気ブレーキ力(BF22)が第3演算部8から(+)のセルに入力された第2演算部5は、(BF22−ΔFB=Bt2)が演算される。車両ブレーキ力(Bt2)は、第2演算部5からVVVF装置9及び第4演算部12の(+)セルへ出力される。車両ブレーキ力(Bt2)が入力されたVVVF装置9は、車両ブレーキ力(Bt2)を出力し、車両ブレーキ力(Bt2)が実行される。車両ブレーキ力(Bt1)が実行されると、VVVF装置9へ車両実行・電気ブレーキ力(EBF)がフィードバックされる。フィードバックされた車両実行・電気ブレーキ力(EBF)は、VVVF装置9から第4演算部12の(−)セルへ出力される。(+)セルから車両ブレーキ力(Bt2)が、(―)のセルから車両実行・電気ブレーキ力(EBF)が入力された第4演算部12は、(Bt2―EBF=ABF1)が演算される。
【0024】
必要補足ブレーキ力(ABF1)必要補足ブレーキ力(ABF1)は、指令した電気ブレーキ力と実行した電気ブレーキ力がどれくらい乖離しているかを求めている。演算された必要補足ブレーキ力(ABF1)は、第4演算部12から第5演算部14の(+)セルへ出力される。また、最大電気ブレーキ出力部7から空気ブレーキ指令部13へ入力された空気ブレーキ力(BF1)は、空気ブレーキ指令部13から第5演算部14の(+)セルへ出力される。必要補足ブレーキ力(ABF1)と空気ブレーキ力(BF1)を(+)セルから入力された第5演算部14は、(ABF1+BF1=ABF2)を演算する。電力ブレーキ力で賄うことのできなかった必要ブレーキ力を補うための空気ブレーキ力(ABF2)は、第5演算部14から空気ブレーキ力実行指令部15へ出力される。空気ブレーキ力(ABF2)が入力された空気ブレーキ力実行指令部15は空気ブレーキ装置へ空気ブレーキ力(ABF2)の実行指令を出力する。
【0025】
(効果)
このような構成をもつ電気車用定位置停止制御は、低速度領域が電力回生ブレーキで制御できるので、停止精度が向上する。また、電気ブレーキ制御は空気ブレーキ制御よりも、車両内に乗車している乗客の乗り心地を改善するため、快適な車両走行が可能となる。また、空気ブレーキを併用する制御システムになっているため、緊急停止が必要な際は、空気ブレーキを使用することも可能であり、そのため、車両走行の安全性も確保することができる。
【0026】
また、本実施形態の低速領域における電気ブレーキ力パターンは、中高速領域にも適応可能であり、その際は中高速領域からの精度の良い制御が可能である。
【符号の説明】
【0027】
1 速度パターン出力部
2 車両走行速度検出部
3 第1演算部
4 ブレーキ力補足演算部
5 第2演算部
6 必要ブレーキ出力部
7 最大電気ブレーキ出力部
8 第3演算部
9 VVVF装置
10 低速条件指令部
11 定電力ブレーキパターン出力部
12 第4演算部
13 空気ブレーキ指令部
14 第5演算部
15 空気ブレーキ力実行指令部
16 定位置停止制御部
【特許請求の範囲】
【請求項1】
車両が駅の目標停止位置に停止することを制御する制御部へ、前記車両の走行速度が低速領域に入ったことを検知し、低速条件指令を出力する低速条件指令部と、
前記低速条件指令部からの低速条件指令受けて、前記車両に搭載されている電気ブレーキが中高速領域の電気ブレーキ力よりも前記低速領域の前記電気ブレーキ力が低いことを、特徴とする電気車用定位置停止制御装置。
【請求項2】
前記制御部において、車両に搭載されている電気ブレーキと空気ブレーキを利用して、駅内の目標停止位置に停止すること
を特徴とする請求項1記載の電気車用定位置停止制御装置。
【請求項1】
車両が駅の目標停止位置に停止することを制御する制御部へ、前記車両の走行速度が低速領域に入ったことを検知し、低速条件指令を出力する低速条件指令部と、
前記低速条件指令部からの低速条件指令受けて、前記車両に搭載されている電気ブレーキが中高速領域の電気ブレーキ力よりも前記低速領域の前記電気ブレーキ力が低いことを、特徴とする電気車用定位置停止制御装置。
【請求項2】
前記制御部において、車両に搭載されている電気ブレーキと空気ブレーキを利用して、駅内の目標停止位置に停止すること
を特徴とする請求項1記載の電気車用定位置停止制御装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2011−73632(P2011−73632A)
【公開日】平成23年4月14日(2011.4.14)
【国際特許分類】
【出願番号】特願2009−228898(P2009−228898)
【出願日】平成21年9月30日(2009.9.30)
【出願人】(000003078)株式会社東芝 (54,554)
【Fターム(参考)】
【公開日】平成23年4月14日(2011.4.14)
【国際特許分類】
【出願日】平成21年9月30日(2009.9.30)
【出願人】(000003078)株式会社東芝 (54,554)
【Fターム(参考)】
[ Back to top ]