
電池検査装置

【課題】高容量のスタック型の電池であっても、電極板の位置ずれを検査できる電池検査装置を提供する。
【解決手段】層をなす複数の四角形の電極板を有する電池1の電極板の位置ずれを検査する電池検査装置であり、X線管2から放射されるX線ビーム3に電極板が沿うように電池1を位置決めする位置決め機構4と、電池1を透過したX線ビーム3を検出し透過像として出力するX線検出器5と、電極板の第一の角部分を面に沿ってかつ辺に対し傾斜した方向で透過したX線ビーム3を検出した第一の透過像と、電極板の第二の角部分を面に沿ってかつ辺に対し傾斜した方向で透過したX線ビーム3を検出した第二の透過像とを取込んで処理し、電極板の位置ずれを検出して良否を判定するデータ処理部6とを有する電池検査装置。
【解決手段】層をなす複数の四角形の電極板を有する電池1の電極板の位置ずれを検査する電池検査装置であり、X線管2から放射されるX線ビーム3に電極板が沿うように電池1を位置決めする位置決め機構4と、電池1を透過したX線ビーム3を検出し透過像として出力するX線検出器5と、電極板の第一の角部分を面に沿ってかつ辺に対し傾斜した方向で透過したX線ビーム3を検出した第一の透過像と、電極板の第二の角部分を面に沿ってかつ辺に対し傾斜した方向で透過したX線ビーム3を検出した第二の透過像とを取込んで処理し、電極板の位置ずれを検出して良否を判定するデータ処理部6とを有する電池検査装置。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、容器内に層状に正極板(正極の電極板)と負極板(負極の電極板)を交互に配置して成るスタック型の電池の正極板と負極板の位置ずれを検査する電池検査装置に関する。
【背景技術】
【0002】
近年、携帯電話などの機器の発達や電気自動車の実用化でリチウムイオン電池やニッケル水素電池などの二次電池の需要が拡大している。
【0003】
特に、電解液をゲル状にしたリチウムイオンポリマー電池が液漏れし難く、また、エネルギー密度が高い、薄型にできるなどの理由で普及しはじめている。リチウムイオンポリマー電池は平面状の正極板と負極板をセパレータを介して何層も積み上げる構造(以下スタック型)になっている。
【0004】
このリチウムイオンポリマー電池において、正極板が負極板よりはみ出していると、使用しているうちに、はみ出した正極板にリチウムが析出してショートし、発火することがある。そのため、正極板と負極板の位置を保ってずれが生じないようにすることが安全のため重要である。このずれは容器封印後に放射線透視をおこなって検査されている。
【0005】
このようなスタック型電池の放射線透視を行なう従来の電池検査装置としては特許文献1に記載の装置がある。
【0006】
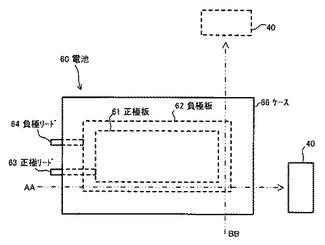
図17は従来のスタック型電池の放射線透視による検査方法を示す模式図である。図17に示すように、まず、電池60の正極板61の長辺に沿ったAA方向に放射線を放射し、放射線検出器40で透過像を検出する。この放射線透過像を画像処理することで、長辺に沿って層ごとに正極板61と負極板62の位置が適正か判定する。次に、電池60の正極板61の短辺に沿ったBB方向に放射線を放射し、同様に、短辺に沿って層ごとに正極板61と負極板62の位置が適正か判定する。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開2004−22206号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
近年、スタック型のリチウムイオンポリマー電池は高容量化する傾向にある。高容量化することで、電極板の大きさは例えば一辺10cmないし30cmと大型化し、正極板と負極板の一組が成す層の厚さは例えば0.15mmと薄層化し、層数も例えば50と増大している(従来は5cm、0.3mm、10層程度)。
【0009】
このため、従来のように電極板の一辺に沿った方向の透視を行うと、一辺が長くなり層も薄くなっているため、電極板の反りの影響で放射線が通りにくくなることで、放射線透過像は不鮮明になり、また電極板の透過像が重なり合ってさらに不鮮明になって検査ができなくなる問題がある。
【0010】
本発明は、上記の問題を解決するためのものであり、その目的は、高容量のスタック型の電池であっても、電極板の位置ずれを検査できる電池検査装置を提供することにある。
【課題を解決するための手段】
【0011】
上記の問題を解決するために請求項1記載の発明は、層をなす複数の四角形の電極板を有する電池の前記電極板の位置ずれを検査する電池検査装置であり、放射線源と、前記放射線源から放射される放射線ビームに前記電極板が沿うように前記電池を位置決めする位置決め手段と、前記電池を透過した前記放射線ビームを検出し透過像として出力する放射線検出器と、前記電極板の第一の角部分を面に沿ってかつ辺に対し傾斜した方向で透過した放射線ビームを検出した第一の透過像と、前記電極板の第二の角部分を面に沿ってかつ辺に対し傾斜した方向で透過した放射線ビームを検出した第二の透過像とを取込んで処理し、前記電極板の位置ずれを検出して良否を判定するデータ処理手段と、を有することを要旨とする。
【0012】
この構成で、電極板の2つの角部分それぞれを、面に沿ってかつ辺に対し傾斜した方向で透過像を撮影(検出と出力)するので、放射線ビームが電極板を透過する長さを短くして透過像を得ることができ、電極板の反りの影響で放射線が通りにくくなることや反りの影響で電極板の像が不鮮明になることを軽減でき、また、撮影した2つの透過像から、平行ずれの前提の下に電極板の位置ずれを検出し良否判定を行うことができ、高容量のスタック型の電池で電極板が大きく薄層であっても、透過像から電極板の位置ずれを検出することが可能となる。
【0013】
上記の問題を解決するために請求項2記載の発明は、層をなす複数の四角形の電極板を有する電池の前記電極板の位置ずれを検査する電池検査装置であり、放射線源と、前記放射線源から放射される放射線ビームに前記電極板が沿うように前記電池を位置決めする位置決め手段と、前記電池を透過した前記放射線ビームを検出し透過像として出力する放射線検出器と、前記電極板の第一の角部分を面に沿ってかつ辺に対し傾斜した2つの方向でそれぞれ透過した放射線ビームを検出した第一の透過像と第二の透過像とを取込んで処理し、前記電極板の位置ずれを検出して良否を判定するデータ処理手段と、を有することを要旨とする。
【0014】
この構成で、電極板の1つの角部分を、面に沿ってかつ辺に対し傾斜した2つの方向でそれぞれ透過像を撮影するので、放射線ビームが電極板を透過する長さを短くして透過像を得ることができ、電極板の反りの影響で放射線が通りにくくなることや反りの影響で電極板の像が不鮮明になることを軽減でき、また、撮影した2つの透過像から、平行ずれの前提の下に電極板の位置ずれを検出し良否判定を行うことができ、高容量のスタック型の電池で電極板が大きく薄層であっても、透過像から電極板の位置ずれを検出することができる。
【0015】
上記の問題を解決するために請求項3記載の発明は、請求項2に記載の電池検査装置において、前記データ処理手段は、前記第一の透過像と前記第二の透過像に加え、前記電極板の第二の角部分を面に沿ってかつ辺に対し傾斜した2つの方向でそれぞれ透過した放射線ビームを検出した第三の透過像と第四の透過像とを取込んで処理し、前記電極板の位置ずれを検出して良否を判定することを要旨とする。
【0016】
この構成で、電極板の2つの角部分それぞれを、面に沿ってかつ辺に対し傾斜した2つの方向でそれぞれ透過像を撮影するので、放射線ビームが電極板を透過する長さを短くして透過像を得ることができ、電極板の反りの影響で放射線が通りにくくなることや反りの影響で電極板の像が不鮮明になることを軽減でき、また、撮影した4つの透過像から、平行ずれおよび回転ずれの前提の下に電極板の位置ずれを検出し良否判定を行うので、高容量のスタック型の電池で電極板が大きく薄層であっても、透過像から電極板の位置ずれを検出することができる。
【0017】
上記の問題を解決するために請求項4記載の発明は、請求項2に記載の電池検査装置において、前記データ処理手段は、前記第一の透過像と前記第二の透過像に加え、前記電極板の第二の角部分を面に沿ってかつ辺に対し傾斜した方向で透過した放射線ビームを検出した第三の透過像を取込んで処理し、前記電極板の位置ずれを検出して良否を判定することを要旨とする。
【0018】
この構成で、電極板の1つの角部分を、面に沿ってかつ辺に対し傾斜した2つの方向でそれぞれ透過像を撮影し、また、他の角部分を面に沿ってかつ辺に対し傾斜した1つの方向で透過像を撮影するので、放射線ビームが電極板を透過する長さを短くして透過像を得ることができ、電極板の反りの影響で放射線が通りにくくなることや反りの影響で電極板の像が不鮮明になることを軽減でき、また、撮影した3つの透過像から、平行ずれおよび回転ずれの前提の下に電極板の位置ずれを検出し良否判定を行うので、高容量のスタック型の電池で電極板が大きく薄層であっても、透過像から電極板の位置ずれを検出することができる。
【0019】
上記の問題を解決するために請求項5記載の発明は、層をなす複数の四角形の電極板を有する電池の前記電極板の位置ずれを検査する電池検査装置であり、放射線源と、前記放射線源から放射される放射線ビームに前記電極板が沿うように前記電池を位置決めする位置決め手段と、前記電池を透過した前記放射線ビームを検出し透過像として出力する放射線検出器と、前記電極板の4つの角部分それぞれを面に沿ってかつ辺に対し傾斜した2つの方向でそれぞれ透過した放射線ビームを検出した8つの透過像を取込んで処理し、前記電極板の位置ずれを検出して良否を判定するデータ処理手段と、を有することを要旨とする。
【0020】
この構成で、電極板の4つの角部分それぞれを、面に沿ってかつ辺に対し傾斜した2つの方向でそれぞれ透過像を撮影するので、放射線ビームが電極板を透過する長さを短くして透過像を得ることができ、電極板の反りの影響で放射線が通りにくくなることや反りの影響で電極板の像が不鮮明になることを軽減でき、また、撮影した8つの透過像から、平行ずれおよび回転ずれおよび電極板の寸法不確定の前提の下に電極板の位置ずれを検出し良否判定を行うので、高容量のスタック型の電池で電極板が大きく薄層であっても、透過像から電極板の位置ずれを検出することができる。
【発明の効果】
【0021】
本発明によれば、高容量のスタック型の電池であっても、電極板の位置ずれを検査できる。
【図面の簡単な説明】
【0022】
【図1】本発明の第一の実施形態の電池検査装置の構成図(平面図)。
【図2】電池1の構造を示す模式図。
【図3】第一の実施形態の検査のフロー図。
【図4】第一の実施形態で得られた透過像を示す模式図。
【図5】第一の実施形態における位置ずれΔx,Δyを求める説明図。
【図6】本発明の第二の実施形態の電池検査装置の構成図(平面図)。
【図7】第二の実施形態の検査のフロー図。
【図8】第二の実施形態における位置ずれΔx,Δyを求める説明図。
【図9】本発明の第三の実施形態の電池検査装置の構成図(平面図)。
【図10】第三の実施形態の検査のフロー図。
【図11】第三の実施形態における位置ずれΔx(i),Δy(i)を求める説明図。
【図12】第三の実施形態の変形例2における位置ずれΔx(2),Δy(2)を求める説明図。
【図13】本発明の第四の実施形態の電池検査装置の構成図(平面図)。
【図14】第四の実施形態の検査のフロー図。
【図15】第四の実施形態における負極板の突出長さcx,cyを求める説明図。
【図16】各実施形態共通の変形例3における電極板に面取りがある場合の補正の説明図(一例)。
【図17】従来のスタック型電池の放射線透視による検査方法を示す模式図。
【発明を実施するための形態】
【0023】
(第一の実施形態の構成)
図1は本発明の第一の実施形態の電池検査装置の構成図(平面図)である。
【0024】
電池検査装置は、電池1の電極板の位置ずれを検査する装置であり、X線管2(放射線源)と、X線管2から放射されるX線ビーム3(放射線ビーム)の中に電池1を位置決めする位置決め機構4と、電池1を透過したX線ビーム3を検出し透過像(透過データ)として出力するX線検出器5(放射線検出器)と、透過像を取り込み電池の電極板の位置ずれを検出し良否を判定するデータ処理部6、データ処理部6からの指令で位置決め機構4を制御する機構制御部7、より成る。また、他の構成として、X線管2に高電圧を供給する高圧発生器や管電圧・管電流を制御するX線制御器、電池1を搬送して位置決め機構4に授受する電池搬送機構、不良と判定した電池を排除する排除機構、X線コリメータやX線遮蔽箱等を有するが、図1では省略している。
【0025】
X線管2としては、例えば、X線ビーム3の発散点であるX線焦点Fの大きさが1μm程度のマイクロフォーカスX線管を用いる。
【0026】
X線検出器5は、2次元の分解能でX線を検出するもので、例えば、X線像を可視光像に変換するX線II(イメージインテンシファイア)と、この可視光像を撮影してデジタルデータとしての透過像を出力する撮像カメラ、及びX線IIと撮像カメラを制御する検出器制御部、等より成る。
【0027】
図2は電池1の構造を示す模式図である。図2(a)は平面図、図2(b)はE−E断面図、図2(c)は図2(b)の一部拡大図である。スタック型の電池1は、例えば、リチウムイオンポリマー電池で、電極板としては角が直角の四角形で、約100×200mmの互いに同一形状の正極板11とこれより数mm大きな互いに同一形状の負極板12が交互に重ねられ、正極板11と負極板12の一組が成す層の厚さは約0.2mmで、約30層が重ねられ、全体は約6mmの厚みになる。
【0028】
正極板11と負極板12の間には薄い樹脂製のセパレータがあるが図では省略されている。電極板(正極板11と負極板12の総称)11、12の全体はアルミとポリプロピレン多層のラミネートフィルムでできたケース13に収納され電極板の間隙にはゲル状電解液14が充填されている。各正極板11には正極リード15が接続され、正極リード15は1本に束ねられて外部に取り出され、各負極板12には同様に負極リード16が接続され、同様に外部に取り出されている。
【0029】
第一の実施形態では、電池1に対し、電極板11、12の第一の角部分C1を電極板11、12の面に沿ってかつ辺に対し45°傾斜した方向P1で透過した放射線ビームを検出した第一の透過像と、電極板11、12の第二の角部分C2を電極板11、12の面に沿ってかつ辺に対し45°傾斜した方向P2で透過した放射線ビームを検出した第二の透過像を撮影する。
【0030】
図1に戻って、位置決め機構4は平板状の電池1を水平面(紙面)に沿ってホルダ4aで保持し、X線ビーム3(のX線光軸L)に電極板11、12の面が沿うように位置決めする。位置決め機構4は、電極板の第一の角部分C1を面に沿ってかつ辺に対し45°傾斜した方向P1でX線ビーム3(のX線光軸L)が透過するよう位置決めし(実線)、さらに、電池1をホルダ4aごと水平面に沿って回転軸RAに対し回転させ、電極板の第二の角部分C2を面に沿ってかつ辺に対し45°傾斜した方向P2でX線ビーム3(のX線光軸L)が透過するよう位置決めする(点線)。
【0031】
機構制御部7はデータ処理部6からの指令で位置決め機構4を制御するとともに、不図示の電池搬送機構や不良と判定した電池を排除する排除機構を制御するほか、これらの機構のステータスをデータ処理部6に送信する。
【0032】
データ処理部6は、例えば、通常のコンピュータであり、CPU、メモリ、インターフェース、キーボードやマウスなどの入力部、表示部、などを持つ。データ処理部6は、記憶している検査プログラムをCPUにより実行し、X線検出器5と機構部制御部7に指令を送信して検査を行う。データ処理部6は、X線検出器5から送られた透過像をメモリに記憶し、CPUにより電極板の位置ずれ検出と判定を実行して電池1ごとに良否判定を行い、不良品の場合、機構制御部7に判定結果として不良品の排除信号を送信する。
【0033】
(第一の実施形態の作用)
図3、図4、図5を参照して、第一の実施の形態における作用を説明する。
【0034】
第一の実施形態は、複数の電極板11、12間の相対的位置ずれを、前提、
{電極板それぞれの形状は正確(辺の長さと角の角度が設計値どおり)で誤差は無視できる}、
{ずれは平行ずれのみ}、
の下に検出するものである。
【0035】
図3は第一の実施形態の検査のフロー図である。検査は、検査プログラムによりデータ処理部6のCPUにより行われる。
【0036】
ステップS1で、位置決め機構4が、電池1を第一の角部分C1を45°傾斜した方向P1でX線ビーム3が透過するよう位置決めし、X線検出器5が透過像を撮影し、データ処理部6が透過像を取込む。
【0037】
図4は第一の実施形態で得られた透過像を示す模式図である。図4(a)は角部分C1、図4(b)は角部分C2の透過像である。
【0038】
ステップS2で、図4(a)を参照して、データ処理部6は、ステップS1で得た角部分C1の透過像を用いて正極板に対する負極板の突出長さL1を求める。突出長さL1は、上から順に、隣接する正極板11負極板12の組み合わせ番号kごとにL1(k)として求める(k=1,2,…K)。以下、便宜的にこの組み合わせ番号kを層番号kと呼ぶことにする。L1(k)は通常の画像処理を用い、例えば、フィルタ処理、2値化、電極板端部の識別と座標求出などを行って求める。
【0039】
なお、正極板が負極板より突出していた場合、突出長さL1(k)はマイナス値とする。また、突出長さL1(k)としては画像上の画素単位の長さを実長に変換して求めるものとする。実長L1(k)は、
実長=画素単位の長さ×検出面上の1画素寸法×FOD/FDD ………(1)
で求められる。ここでFODはX線焦点Fと電池1(の角部分)の距離、FDDはX線焦点FとX線検出器5(検出面5a)との距離である(図1参照)。
【0040】
ステップS3で、位置決め機構4が、電池1を第二の角部分C2を45°傾斜した方向P2でX線ビーム3が透過するよう位置決めし、X線検出器5が透過像を撮影し、データ処理部6が透過像を取込む。
【0041】
ステップS4で、図4(b)を参照して、データ処理部6は、ステップS3で得た角部分C2の透過像を用いて、ステップS2と同様に、上から順に、正極板に対する負極板の突出長さL2(k)を実長で求める(k=1,2,…K)。
【0042】
ステップS5で層番号kのループに入りステップS6,S7をk=1,2,…Kで以下のように繰り返す。
【0043】
ステップS6で、ステップS2、S4で求めたL1(k)、L2(k)から、負極板を基準としたときの正極板の所定位置からの位置ずれΔx,Δyを以下のように求める。
【0044】
図5は第一の実施形態における位置ずれΔx,Δyを求める説明図である。図5は1つの層での正極板11と負極板12の位置関係を示している。
【0045】
図5を参照して、ずれのないときの負極板12の突出量をx、y方向それぞれcx0、cy0とすると、ずれのないときのL1とL2は、式、
L10=cx0・sinθ1+cy0・cosθ1 ………(2)
L20=cx0・cosθ2+cy0・sinθ2 ………(3)
で求められる。ここでθ1=45°、θ2=45°である。
【0046】
次に、L1(k)、L2(k)のずれが無いときからの変化分を、式、
ΔL1(k)=L1(k)−L10 ………(4)
ΔL2(k)=L2(k)−L20 ………(5)
で求める。
【0047】
次に、図5より、ΔL1(k)、ΔL2(k)と正極板の位置ずれΔx,Δyとの間に連立方程式、
ΔL1(k)=−Δx・sinθ1−Δy・cosθ1 ………(6)
ΔL2(k)=Δx・cosθ2−Δy・sinθ2 ………(7)
が成り立つことが導ける。この連立方程式を解くと、式、
Δx={ΔL2(k)・cosθ1−ΔL1(k)・sinθ2}/cos(θ1−θ2) ………(8)
Δy={−ΔL2(k)・sinθ1−ΔL1(k)・cosθ2}/cos(θ1−θ2) ………(9)
が求められる。
【0048】
すなわち、ステップS6で、式(2)ないし式(5)、及び、式(8)、式(9)を順次計算することで、層kにおける正極板のずれΔx,Δyが求められる。
【0049】
ステップS7で、層別の良否判定を以下のように行う。
ずれの許容値をx、y方向でそれぞれΔxlmt、Δylmtとして、
|Δx|<Δxlmt、かつ、|Δy|<Δylmt
のとき層kについて、良品とし、他の場合不良品とする。
【0050】
ステップS8で、全kについてループが終了してない場合はステップS5にもどりkを変えてステップS6,S7を繰り返し、全kについて終了した場合はステップS9に進む。
【0051】
ステップS9では、総合の良否判定を行う。総合の良否判定は全層kで良品と判定されたときのみ総合で良品と判定することで行われる。
【0052】
以上の検査のフローにより、全層で負極板の突出長さが、xの正負方向で規定値(cx0−Δxlmt)以上、かつ、yの正負方向で規定値(cy0−Δylmt)以上となる電池1のみが良品と判定される。
【0053】
(第一の実施形態の効果)
第一の実施形態によれば、電極板の2つの角部分それぞれを、面に沿ってかつ辺に対し45°傾斜した方向で透過像を撮影するので、放射線ビームが電極板を透過する長さを短くして透過像を得ることができ、電極板の反りの影響で放射線が通りにくくなることや反りの影響で電極板の像が不鮮明になることを軽減でき、また、撮影した2つの透過像から、平行ずれの前提の下に電極板の位置ずれを検出し良否判定を行うことができ、高容量のスタック型の電池で電極板が大きく薄層であっても、透過像から電極板の位置ずれを検出することが可能となる。
【0054】
(第一の実施形態の変形)
(変形例1)
第一の実施形態では、電極板の面に沿ってかつ辺に対し45°傾斜した方向で角部分を撮影しているが、必ずしも45°でなくてもよい。図5を参照して、傾斜角θ1、θ2が45°のときX線ビームが電極板を透過する長さは最小となり最良であるが、45°から離れたときこの長さの増加は緩やかで、傾斜角θ1、θ2は大まかに45°程度であれば良く、例えば約20°ないし70°の範囲に設定可能である。
【0055】
(変形例2)
第一の実施形態では、2つの角部分について透過像を撮影しているが、3つ以上の角部分について面に沿ってかつ辺に対し45°傾斜した方向で透過像を撮影し、これらの透過像から電極板の位置ずれを検出するようにしてもよい。これにより、統計精度を上げて位置ずれを検出することができる。ここで、位置ずれΔx、Δyを求める計算としては、例えば、角部分の2つの組み合わせを変えて、それぞれから第一の実施形態と同様に位置ずれを求め、求めた位置ずれを平均して最終的な位置ずれΔx,Δyとすることで行うことができる。
【0056】
(変形例3)
図3を参照して、第一の実施形態では、kループ(ステップS5ないしS8)を全層について計算しているが、ステップS7の層別の良否判定で不良と判定されたとき、ループを終了させステップS9の総合判定に移るようにしてもよい。1つの層でも不良があった場合、総合判定で不良になるからである。
【0057】
(変形例4)
第一の実施形態では、2つの角部分についてそれぞれθ1、θ2傾斜した方向で撮影しているが、さらに他の1つの角部分をθ3傾斜した方向で撮影し、3つの透過像から、回転ずれも含めて位置ずれを検出することが可能である。この場合、平行ずれΔxp,Δypと回転ずれαを未知数として3つの方程式を立てることができる。この方程式は、すこし複雑であるが、方程式の数値解析により解いて位置ずれを求めることができる。
【0058】
この方式を採用する場合は、θ1,θ2,θ3は、45°でなく、透過方向が電極板の長いほうの辺と概略20°前後で交差するように設定すると精度が上がる。
【0059】
(第二の実施形態の構成)
図6は本発明の第二の実施形態の電池検査装置の構成図(平面図)である。第一の実施の形態と同じ構成は同じ番号を付し、説明は省略する。図6の位置決め機構4Aは図1の位置決め機構4から電池1を位置決めする動作のみが異なる。また、図6のデータ処理部6Aは図1のデータ処理部6から検査プログラムのみが異なる。
【0060】
位置決め機構4Aは平板状の電池1を水平面(紙面)に沿ってホルダ(不図示)で保持し、X線ビーム3(のX線光軸L)に電極板11,12の面が沿うように位置決めする。位置決め機構4Aは、電池1を、電極板の第一の角部分C1を面に沿ってかつ辺に対しθ1傾斜した方向でX線ビーム3(のX線光軸L)が透過するよう位置決めし(実線)、さらに、ホルダごと水平面に沿って回転軸RAに対し回転させ、電極板の角部分C1を面に沿ってかつ辺に対しθ2傾斜した方向でX線ビーム3(のX線光軸L)が透過するよう位置決めする(点線)。
【0061】
(第二の実施形態の作用)
図7、図8を参照して、第二の実施の形態における作用を説明する。
【0062】
第二の実施形態は、複数の電極板11、12間の相対的位置ずれを、第一の実施形態と同じ前提、
{電極板それぞれの形状は正確で誤差は無視できる}、
{ずれは平行ずれのみ}、
の下に検出するものである。
【0063】
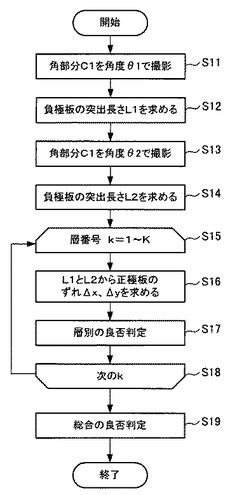
図7は第二の実施形態の検査のフロー図である。検査は、検査プログラムによりデータ処理部6AのCPUにより行われる。
【0064】
ステップS11で、位置決め機構4Aが、電極板の第一の角部分C1をθ1傾斜した方向でX線ビーム3が透過するよう電池1を位置決めし、X線検出器5が透過像を撮影し、データ処理部6Aが透過像を取込む。得られた透過像は図4(a)と同等である。
【0065】
ステップS12で、図4(a)を参照して、データ処理部6Aは、ステップS11で得た角部分C1の透過像を用いて正極板に対する負極板の突出長さL1を求める。突出長さL1は、第一実施形態と同様に、層kごとに実長で、上から順に、L1(k)として求める(k=1,2,…K)。
【0066】
ステップS13で、位置決め機構4Aが、電極板の第一の角部分C1をθ2傾斜した方向でX線ビーム3が透過するよう電池1を位置決めし、X線検出器5が透過像を撮影し、データ処理部6Aが透過像を取込む。得られた透過像は図4(a)と同等である。
【0067】
ステップS14で、図4(a)を参照して、データ処理部6Aは、ステップS13で得た角部分C1の透過像を用いて正極板に対する負極板の突出長さL2を求める。突出長さL2は、第一実施形態と同様に、層kごとに実長で、上から順に、L2(k)として求める(k=1,2,…K)。
【0068】
ステップS15で、層番号kのループに入りステップS16,S17をk=1,2,…Kで以下のように繰り返す。
【0069】
ステップS16で、ステップS12、S14で求めたL1(k)、L2(k)から、負極板を基準としたときの正極板の所定位置からの位置ずれΔx,Δyを以下のように求める。
【0070】
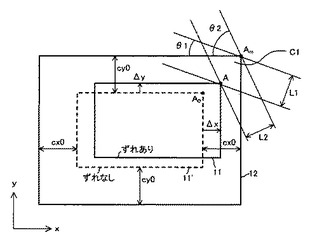
図8は第二の実施形態における位置ずれΔx,Δyを求める説明図である。図8は1つの層での正極板11と負極板12の位置関係を示している。
【0071】
図8を参照して、ずれのないときの負極板12の突出量をx、y方向それぞれcx0、cy0とすると、L1(k)、L2(k)と正極板の位置ずれΔx,Δyとの間に連立方程式、
L1(k)=(cx0−Δx)・sinθ1+(cy0−Δy)・cosθ1
………(10)
L2(k)=(cx0−Δx)・sinθ2+(cy0−Δy)・cosθ2
………(11)
が成り立つことが導ける。この連立方程式を解くと、式、
Δx=cx0+{L1(k)・cosθ2−L2(k)・cosθ1}/sin(θ2−θ1) ………(12)
Δy=cy0−{L1(k)・sinθ2−L2(k)・sinθ1}/sin(θ2−θ1) ………(13)
が求められる。
【0072】
すなわち、ステップS16で、式(12)、式(13)を計算することで、層kにおける正極板のずれΔx,Δyが求められる。
【0073】
ステップS17で、層別の良否判定を以下のように行う。
ずれの許容値をx、y方向でそれぞれΔxlmt、Δylmtとして、
|Δx|<Δxlmt、かつ、|Δy|<Δylmt
のとき層kについて、良品とし、他の場合不良品とする。
【0074】
ステップS18で、全kについてループが終了してない場合はステップS15にもどりkを変えてステップS16,S17を繰り返し、全kについて終了した場合はステップS19に進む。
【0075】
ステップS19では、総合の良否判定を行う。総合の良否判定は全層kで良品と判定されたときのみ総合で良品と判定することで行われる。
【0076】
以上の検査のフローにより、全層で負極板の突出長さが、xの正負方向で規定値(cx0−Δxlmt)以上、かつ、yの正負方向で規定値(cy0−Δylmt)以上となる電池1のみが良品と判定される。
【0077】
(第二の実施形態の効果)
第二の実施形態によれば、電極板の1つの角部分を、面に沿ってかつ辺に対し傾斜した2つの方向でそれぞれ透過像を撮影するので、放射線ビームが電極板を透過する長さを短くして透過像を得ることができ、電極板の反りの影響で放射線が通りにくくなることや反りの影響で電極板の像が不鮮明になることを軽減でき、また、撮影した2つの透過像から、平行ずれの前提の下に電極板の位置ずれを検出し良否判定を行うことができ、高容量のスタック型の電池で電極板が大きく薄層であっても、透過像から電極板の位置ずれを検出することが可能となる。
【0078】
(第二の実施形態の変形)
(変形例1)
第二の実施形態で、傾斜角θ1、θ2は任意に設定でき、θ1、θ2の差が大きい、すなわち90°に近いほうがΔx、Δyが精度よく求められるが、θ1、θ2それぞれが0°あるいは90°に近いとX線ビームが電極板を透過する長さが長くなり透過像が不鮮明になってしまう。そこで、傾斜角θ1、θ2は、一方が概略20°前後、他方が概略70°前後とするのがよい。
【0079】
(変形例2)
第二の実施形態では、1つの角部分について2方向の透過像を撮影しているが、2つ以上の角部分について面に沿ってかつ辺に対し傾斜した2つの方向でそれぞれ透過像を撮影し、これらの透過像から電極板の位置ずれを検出するようにしてもよい。これにより、統計精度を上げて位置ずれを検出することができる。ここで、位置ずれΔx、Δyを求める計算としては、例えば、角部分を変えて、それぞれから第二の実施形態と同様に位置ずれを求め、求めた位置ずれを平均して最終的な位置ずれΔx、Δyとすることで行うことができる。
【0080】
(変形例3)
図7を参照して、第二の実施形態では、kループ(ステップS15ないしS18)を全層について計算しているが、ステップS17の層別の良否判定で不良と判定されたとき、ループを終了させステップS19の総合判定に移るようにしてもよい。1つの層でも不良があった場合、総合判定で不良になるからである。
【0081】
(第三の実施形態の構成)
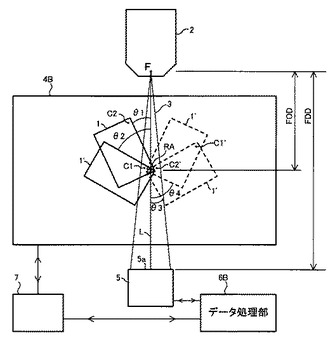
図9は本発明の第三の実施形態の電池検査装置の構成図(平面図)である。第一の実施の形態と同じ構成は同じ番号を付し、説明は省略する。図9の位置決め機構4Bは図1の位置決め機構4から電池1を位置決めする動作のみが異なる。また、図9のデータ処理部6Bは図1のデータ処理部6から検査プログラムのみが異なる。
【0082】
位置決め機構4Bは平板状の電池1を水平面(紙面)に沿ってホルダ(不図示)で保持し、X線ビーム3(のX線光軸L)に電極板11、12の面が沿うように、位置決めする。位置決め機構4Bは、第一の角部分C1を回転軸RA上に配置した状態で電池1をホルダごと水平面に沿って回転軸RAに対し回転させ、電極板の第一の角部分C1を面に沿ってかつ辺に対しθ1及びθ2傾斜した方向それぞれでX線ビーム3が透過するよう2つの位置で位置決めし(実線)、さらに、電池1をホルダごと水平面に沿って移動させ第二の角部分C2を回転軸RA上に配置させてから、電池1を回転軸RAに対し回転させ、電極板の角部分C2を面に沿ってかつ辺に対しθ3及びθ4傾斜した方向それぞれでX線ビーム3が透過するよう2つの位置で位置決めする(点線)。
【0083】
(第三の実施形態の作用)
図10、図11を参照して、第三の実施の形態における作用を説明する。
【0084】
第三の実施形態は、複数の電極板11、12間の相対的位置ずれを、前提、
{電極板それぞれの形状は正確で誤差は無視できる}、
{ずれは平行ずれと回転ずれを含む}、
の下に検出するものである。
【0085】
図10は第三の実施形態の検査のフロー図である。検査は、検査プログラムによりデータ処理部6BのCPUにより行われる。
【0086】
ステップS21で、位置決め機構4Bが、電極板の第一の角部分C1をθ1およびθ2傾斜した方向それぞれでX線ビーム3が透過するよう電池1を位置決めし、それぞれで、X線検出器5が透過像を撮影し、データ処理部6Bが透過像を取込む。得られた2つの透過像はそれぞれ図4(a)と同等である。
【0087】
ステップS22で、図4(a)を参照して、データ処理部6Bは、ステップS21で得た角部分C1の2つの透過像を用いて正極板に対する負極板の突出長さL1とL2をそれぞれ求める。突出長さL1、L2は、第一実施形態と同様に、層kごとに実長で、上から順に、L1(k)、L2(k)として求める(k=1,2,…K)。
【0088】
ステップS23で、位置決め機構4Bが、電極板の第二の角部分C2をθ3およびθ4傾斜した方向それぞれでX線ビーム3が透過するよう電池1を位置決めし、それぞれで、X線検出器5が透過像を撮影し、データ処理部6Bが透過像を取込む。得られた2つの透過像はそれぞれ図4(b)と同等である。
【0089】
ステップS24で、図4(b)を参照して、データ処理部6Bは、ステップS23で得た角部分C2の2つの透過像を用いて正極板に対する負極板の突出長さL3とL4をそれぞれ求める。突出長さL3、L4は、第一実施形態と同様に、層kごとに実長で、上から順に、L3(k)、L4(k)として求める(k=1,2,…K)。
【0090】
ステップS25で、層番号kのループに入りステップS26,S27をk=1,2,…Kで以下のように繰り返す。
【0091】
ステップS26で、ステップS22、S24で求めたL1(k)、L2(k)、L3(k)、L4(k)から、負極板を基準としたときの正極板の4つの頂点の所定位置からの位置ずれΔx(i),Δy(i)、(i=1,2,3,4)を以下のように求める。
【0092】
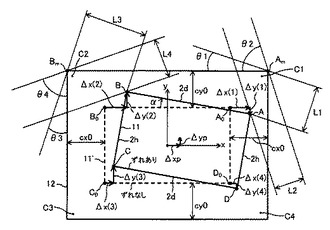
図11は第三の実施形態における位置ずれΔx(i),Δy(i)を求める説明図である。図11は1つの層での正極板11と負極板12の位置関係を示している。
【0093】
図11を参照して、ずれのないときの負極板12の突出量をx、y方向それぞれcx0、cy0とすると、角部分C1での正極板の頂点Aの位置ずれΔx(1),Δy(1)は、L1(k)、L2(k)を用いて、第二実施形態と同様に、式、
Δx(1)=cx0+{L1(k)・cosθ2−L2(k)・cosθ1}/sin(θ2−θ1) ………(14)
Δy(1)=cy0−{L1(k)・sinθ2−L2(k)・sinθ1}/sin(θ2−θ1) ………(15)
で求められる。同様に、角部分C2での正極板の頂点Bの位置ずれΔx(2),Δy(2)は、L3(k)、L4(k)を用いて、第二実施形態と同様に、式、
Δx(2)=−cx0+{L3(k)・sinθ4−L4(k)・sinθ3}/sin(θ4−θ3) ………(16)
Δy(2)=cy0+{L3(k)・cosθ4−L4(k)・cosθ3}/sin(θ4−θ3) ………(17)
で求められる。(式(14)、式(15)で、Δx(1),Δy(1),cx0,cy0,L1,L2,θ1,θ2をそれぞれΔy(2),−Δx(2),cy0,cx0,L3,L4,θ3,θ4で置き換えることで式(16)、式(17)が得られる。)
【0094】
次に、正極板11(頂点A,B,C,D)の各辺の長さを2d、2hとし、平行ずれをΔxp、Δyp、回転ずれをαとすると、図11を参照して、連立方程式、
Δx(1)=Δxp+h・sinα−d・(1−cosα) ………(18)
Δy(1)=Δyp−d・sinα−h・(1−cosα) ………(19)
Δx(2)=Δxp+h・sinα+d・(1−cosα) ………(20)
Δy(2)=Δyp+d・sinα−h・(1−cosα) ………(21)
がなりたつことが導ける。この連立方程式の未知数はα、Δxp、Δypの3つで、方程式の数は4つで冗長性があるが、精度の上がる解を選択すると、α、Δxp、Δypの解として、式、
α=asin{(Δy(2)−Δy(1))/2d} ………(22)
Δxp=(Δx(2)+Δx(1))/2−(Δy(2)−Δy(1))・h/2d
………(23)
Δyp=(Δy(2)+Δy(1))/2+h・(1−cosα) ………(24)
が得られる。次に、得られたα、Δxp、Δypを用いて、角部分C3での正極板の頂点Cの位置ずれΔx(3),Δy(3)、および、角部分C4での正極板の頂点Dの位置ずれΔx(4),Δy(4)は、図11を参照して、式、
Δx(3)=Δxp−h・sinα+d・(1−cosα) ………(25)
Δy(3)=Δyp+d・sinα+h・(1−cosα) ………(26)
Δx(4)=Δxp−h・sinα−d・(1−cosα) ………(27)
Δy(4)=Δyp−d・sinα+h・(1−cosα) ………(28)
で求められる。
【0095】
すなわち、ステップS26で、式(14)ないし式(17)、及び、式(22)ないし式(28)を順次計算することで、層kにおける正極板の4つの頂点の所定位置からの位置ずれΔx(i),Δy(i)、(i=1,2,3,4)が求められる。
【0096】
ステップS27で、層別の良否判定を以下のように行う。ずれの許容値をx、y方向でそれぞれΔxlmt、Δylmtとして、
(Δx(1)<Δxlmt、)かつ、(Δy(1)<Δylmt)、かつ、
(−Δxlmt<Δx(2))、かつ、(Δy(2)<Δylmt)、かつ、
(−Δxlmt<Δx(3))、かつ、(−Δylmt<Δy(3))、かつ、
(Δx(4)<Δxlmt、)、かつ、(−Δylmt<Δy(4))、
のとき層kについて、良品とし、他の場合不良品とする。
【0097】
ステップS28で、全kについてループが終了してない場合はステップS25にもどりkを変えてステップS26,S27を繰り返し、全kについて終了した場合はステップS29に進む。
【0098】
ステップS29では、総合の良否判定を行う。総合の良否判定は全層kで良品と判定されたときのみ総合で良品と判定することで行われる。
【0099】
以上の検査のフローにより、全層で負極板の突出長さが、xの正負方向で規定値(cx0−Δxlmt)以上、かつ、yの正負方向で規定値(cy0−Δylmt)以上となる電池1のみが良品と判定される。
【0100】
(第三の実施形態の効果)
第三の実施形態によれば、電極板の2つの角部分それぞれを、面に沿ってかつ辺に対し傾斜した2つの方向でそれぞれ透過像を撮影するので、放射線ビームが電極板を透過する長さを短くして透過像を得ることができ、電極板の反りの影響で放射線が通りにくくなることや反りの影響で電極板の像が不鮮明になることを軽減でき、また、撮影した4つの透過像から、平行ずれおよび回転ずれの前提の下に電極板の位置ずれを検出し良否判定を行うので、高容量のスタック型の電池で電極板が大きく薄層であっても、透過像から電極板の位置ずれを検出することが可能となる。
【0101】
すなわち、第三の実施形態によれば、高容量のスタック型の電池に対し、電極板の平行ずれだけでなく回転ずれがある場合でも電極板の位置ずれを検出することが可能となる。
【0102】
(第三の実施形態の変形)
(変形例1)
第三の実施形態で、第二実施形態と同様に、傾斜角θ1、θ2、θ3、θ4は任意に設定できる。θ1、θ2(あるいはθ3、θ4)の設定による精度の違いも第二実施形態と同様であり、傾斜角θ1、θ2(あるいはθ3、θ4)は、一方が概略20°前後、他方が概略70°前後とするのがよい。
【0103】
(変形例2)
第三の実施形態で、第二の角部分C2を2方向で撮影しているが、第二の角部分C2については面に沿ってかつ辺に対しθ3傾斜した方向のみの撮影としてもよい。それは、冗長性なくせば、3つの透過像で方程式を立てることができ、位置ずれが解けるからである。
【0104】
すなわち、変形例2では角部分C1を方向θ1、θ2で、角部分C2を方向θ3で撮影した3つの画像から、それぞれ負極板の突出長さL1(k)、L2(k)、L3(k)を求め、L1(k)、L2(k)、L3(k)から、層kごとに正極板の4つの頂点の所定位置からの位置ずれΔx(i),Δy(i)、(i=1,2,3,4)を求める。
【0105】
この場合、まず、頂点Aの位置ずれΔx(1),Δy(1)を、式(14)、式(15)で求める。次に、頂点Bの位置ずれΔx(2),Δy(2)を求める。
【0106】
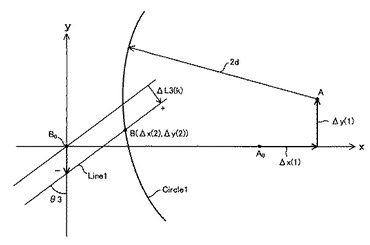
図12は第三の実施形態の変形例2における位置ずれΔx(2),Δy(2)を求める説明図である。図12は1つの層での正極板11の頂点A、Bのずれを示している。A、Bのずれる前の点をそれぞれA0、B0とし、B0を原点にxy座標を取る。まず、L3(k)の、ずれがない時からの変化分ΔL3(k)は、式、
ΔL3(k)=L3(k)−(cx0・cosθ3+cy0・sinθ3)
………(29)
で求められる。ΔL3(k)を用いて、図12を参照して、Line1とCircle1の交点がB点(Δx(2),Δy(2))であるので、Δx(2),Δy(2)を求める連立方程式、
Δy(2)=Δx(2)・cotθ3−ΔL3(k)/sinθ3 ………(30)
{Δx(2)−(2d+Δx(1))}2+{Δy(2)−Δy(1)}2=4d2
………(31)
が成り立つことが導ける。これを解くと、
a=1+cot2θ3 ………(32)
b=2d+Δx(1)+cotθ3・{ΔL3(k)/sinθ3+Δy(1)}
………(33)
c={2d+Δx(1)}2+{ΔL3(k)/sinθ3+Δy(1)}2−4d2 ………(34)
Δx(2)={b−√(b2−a・c)}/a ………(35)
でΔx(2)が求まり、さらに、求めたΔx(2)を式(30)に代入してΔy(2)が求まる。
【0107】
なお、θ3は45°より大きく90°に近い角度にすると、Line1とCircle1が直角に近い角度で交わるので、Δx(2),Δy(2)が精度よく求められるが、90°に近過ぎるとX線ビームが電極板を透過する長さが長くなり透過像が不鮮明になってしまので、例えば70°程度とする。
【0108】
以上のように、式(14)、式(15)、式(29)、式(32)乃至式(35)、及び式(30)を順次計算してΔx(1),Δy(1),Δx(2),Δy(2)が求められる。
【0109】
以下、第三の実施形態と同様に式(22)ないし式(28)を計算して、位置ずれΔx(i),Δy(i)、(i=1,2,3,4)全てを求めることができる。
【0110】
変形例2によれば、透過像の撮影を1つ少なくでき、かつ、第三の実施形態と同じ効果をあげることができる。
【0111】
(変形例3)
第三の実施形態で、2つの角部分をそれぞれ2方向で撮影しているが、3つ以上の角部分をそれぞれ2方向で撮影してもよい。また、少なくとも1つの角部分で2方向撮影すれば残りの角部分は1方向撮影とすることもできる。透過像が3つを超えると冗長性が生じるが、余剰の透過像を統計精度を上げるために用いることができる。
【0112】
(変形例4)
図10を参照して、第三の実施形態では、kループ(ステップS25ないしS28)を全層について計算しているが、ステップS27の層別の良否判定で不良と判定されたとき、ループを終了させステップS29の総合判定に移るようにしてもよい。1つの層でも不良があった場合、総合判定で不良になるからである。
【0113】
(第四の実施形態の構成)
図13は本発明の第四の実施形態の電池検査装置の構成図(平面図)である。第一の実施の形態と同じ構成は同じ番号を付し、説明は省略する。図13の位置決め機構4Cは図1の位置決め機構4から電池1を位置決めする動作のみが異なる。また、図13のデータ処理部6Cは図1のデータ処理部6から検査プログラムのみが異なる。
【0114】
位置決め機構4Cは平板状の電池1を水平面(紙面)に沿ってホルダ(不図示)で保持し、X線ビーム3(のX線光軸L)に電極板11、12の面が沿うように位置決めし、電池1をホルダごと水平面に沿って平行移動させるとともにX線光軸L上の回転軸RAに対し水平面に沿って回転させて位置決めする。具体的には、位置決め機構4Cは、電極板の4つの角部分Ci(i=1,2,3,4)それぞれを回転軸RAに合わせるように電池1を平行移動させ、さらに回転軸RAに対し回転させ、それぞれの角部分Ciを面に沿ってかつ辺に対し傾斜した2つの方向θ1(i),θ2(i)(実線と点線)でそれぞれ放射線ビーム3(のX線光軸L)が透過するように8つの位置決めをする。
【0115】
(第四の実施形態の作用)
図14、図15を参照して、第四の実施の形態における作用を説明する。
【0116】
第四の実施形態は、複数の電極板11、12間の相対的位置ずれを、前提、
{電極板それぞれの形状は不正確で誤差は無視できない}、
{ずれは平行ずれと回転ずれを含む}、
の下に検出するものである。
【0117】
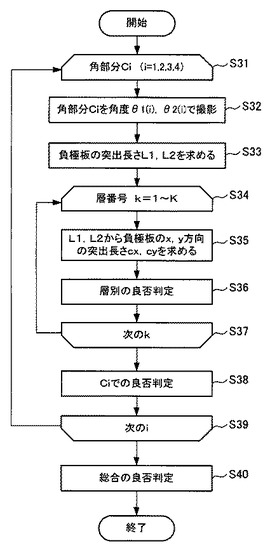
図14は第四の実施形態の検査のフロー図である。検査は、検査プログラムによりデータ処理部6CのCPUにより行われる。
【0118】
ステップS31で、角部分Ci(i=1,2,3,4)のループに入りステップS32ないし,S38をi=1,2,3,4で以下のように繰り返す。
【0119】
ステップS32で、位置決め機構4Cが、電極板の角部分Ciをθ1(i)およびθ2(i)傾斜した方向それぞれでX線ビーム3が透過するよう電池1を位置決めし、それぞれで、X線検出器5が透過像を撮影し、データ処理部6Cが透過像を取込む。得られた2つの透過像はそれぞれ図4(a)と同等である。
【0120】
ステップS33で、図4(a)を参照して、データ処理部6Cは、ステップS32で得た角部分Ciの2つの透過像を用いて正極板に対する負極板の突出長さL1とL2をそれぞれ求める。突出長さL1、L2は、第一実施形態と同様に、層kごとに実長で、上から順に、L1(k)、L2(k)として求める(k=1,2,…K)。
【0121】
ステップS34で、層番号kのループに入りステップS35,S36をk=1,2,…Kで以下のように繰り返す。
【0122】
ステップS35で、ステップS33で求めたL1(k)、L2(k)から、正極板頂点から負極板のx,y方向の突出長さcx,cyを以下のように求める。
【0123】
図15は第四の実施形態における負極板の突出長さcx,cyを求める説明図である。図15は角部Ciの1つの層での正極板11と負極板12の位置関係を示している。
【0124】
図15を参照して、連立方程式、
L1=cx・sinθ1+cy・cosθ1 ………(36)
L2=cx・sinθ2+cy・cosθ2 ………(37)
が導ける。これをcx,cyについて解くと、式、
cx=(L1・cosθ2−L2・cose1)/sin(θ1−θ2)
………(38)
cy=(L1・sinθ2−L2・sinθ1)/sin(θ2−θ1)
………(39)
となる。
【0125】
ステップS35では、式(38)、(39)を計算することで、cx,cyが求められる。
【0126】
ステップS36で層別の良否判定を行う。良否判定は、判定基準をclmtとして、
cx>clmt、かつ、cy>clmt
のとき良品、他のとき不良品とする。
【0127】
ステップS37で、全kについてループが終了してない場合はステップS34にもどりkを変えてステップS35,S36を繰り返し、全kについて終了した場合はステップS38に進む。
【0128】
ステップS38では、角部分Ciでの良否判定を行う。角部分Ciでの良否判定は全層kで良品と判定されたときのみCiで良品と判定することで行われる。
【0129】
ステップS39で全iについてループが終了してない場合はステップS31にもどり、iを変えてステップS32ないしS38を繰り返し、全iについて終了した場合はステップS40に進む。
【0130】
ステップS40では、総合の良否判定を行う。総合の良否判定は全角部分Ciで良品と判定されたときのみ総合で良品と判定することで行われる。
【0131】
以上の検査のフローにより、全角部分の全層で正極板頂点からの負極板の突出長さが、x方向で規定値clmt以上、かつ、y方向で規定値clmt以上となる電池1のみが良品と判定される。
【0132】
(第四の実施形態の効果)
第四の実施形態によれば、電極板の4つの角部分それぞれを、面に沿ってかつ辺に対し傾斜した2つの方向でそれぞれ透過像を撮影するので、放射線ビームが電極板を透過する長さを短くして透過像を得ることができ、電極板の反りの影響で放射線が通りにくくなることや反りの影響で電極板の像が不鮮明になることを軽減でき、また、撮影した8つの透過像から、平行ずれおよび回転ずれおよび電極板の寸法不確定の前提の下に電極板の位置ずれを検出し良否判定を行うので、高容量のスタック型の電池で電極板が大きく薄層であっても、透過像から電極板の位置ずれを検出することが可能となる。
【0133】
すなわち、第四の実施形態によれば、高容量のスタック型の電池に対し、電極板の平
行ずれだけでなく回転ずれおよび電極板の寸法不確定がある場合でも電極板の位置ずれを検出することが可能となる。
【0134】
(第四の実施形態の変形)
(変形例1)
第四の実施形態で、第二実施形態と同様に、傾斜角θ1、θ2は任意に設定できる。θ1、θ2の設定による精度の違いも第二実施形態と同様であり、傾斜角θ1、θ2は、一方が概略20°前後、他方が概略70°前後とするのがよい。
【0135】
(変形例2)
図14を参照して、第四の実施形態では、kループ(ステップS34ないしS37)を全層について計算しているが、ステップS36の層別の良否判定で不良と判定されたとき、ループを終了させステップS38のCiでの良否判定、あるいはステップS40の総合判定に移るようにしてもよい。1つの層でも不良があった場合、Ciでの良否判定と総合判定で不良になるからである。
【0136】
また、同様に、第四の実施形態では、iループ(ステップS31ないしS39)を全角部分Ciについて計算しているが、ステップS38のCiでの良否判定で不良と判定されたとき、ループを終了させステップS40の総合判定に移るようにしてもよい。角部分で1つでも不良があった場合、総合判定で不良に成るからである。
【0137】
(第一ないし第四の実施形態共通の変形)
以下に、第一ないし第四の実施形態に共通する変形例を示す。
【0138】
(変形例1)
各実施形態では、図4を参照して、角部分の透過像を全層が視野に入るように撮影しているが、層と直交する方向に何画像かに分割して撮影するようにしても良い。これは、電池1、X線管2、X線検出器5のいずれか1つ以上を層と直交する方向に移動させて撮影することで行う。これにより、電池1が厚くなった場合でも、拡大率を下げることなく全層の透過像が得られる。
【0139】
(変形例2)
各実施形態では、X線IIと撮像カメラで構成されたX線検出器5を用いているが、2次元分解能のX線検出器であればよく、例えば、半導体光センサアレイとシンチレータを用いたFPD(フラットパネルディテクタ)、あるいは半導体X線センサアレイを用いたFPDでもよい。また、マイクロチャンネルプレートと撮像カメラで構成されたX線検出器などを用いてもよい。
【0140】
また、X線検出器5の代わりに、1次元分解能のX線検出器(X線ラインセンサ)5Aを用いることもできる。この場合は、例えば、図1を参照して、X線ビーム3の水平方向(紙面に沿った方向)の広がりを分解して検出するようにX線検出器5Aを配置し、電池1、X線管2、X線検出器5Aのいずれか1つ以上を垂直方向に走査させながら複数点で1次元の透過像を撮影し、これを合成することで2次元の透過像を得るようにする。
【0141】
さらに、1次元分解能のX線検出器5Aを用いる場合、分解能方向を、X線ビーム3の中心(X線光軸L)に対して略直交する任意方向(垂直や斜め方向)に配置してもよい。この場合、電池1、X線管2、X線検出器5Aのいずれか1つ以上を分解能方向に直交する方向に走査させながら複数点で1次元の透過像を撮影し、これを合成することで2次元の透過像を得るようにできる。
【0142】
(変形例3)
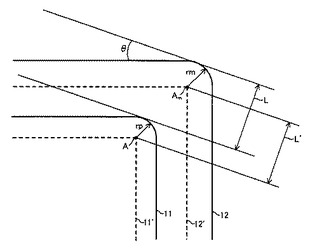
各実施形態では、四角形の電極板を有するスタック型の電池を検査しているが、四角形の電極板としては、角部分に面取り(平面または曲面)が施されているものも含むものとする。面取りがある場合でも、各実施形態の作用どおりに位置ずれが検出できるが、面取りが大きくなると誤差が生じてくる。この場合、面取りの形状が既知であれば、面取りを考慮して計算誤差を補正することができる。
【0143】
図16は各実施形態共通の変形例3における電極板に面取りがある場合の補正の説明図(一例)である。図16は1つの層における正極板11と負極板12の位置関係を示している。面取りは円弧状(円筒面)として、正極板で面取り半径rp、負極板で面取り半径rmとすると、測定した負極板の突出長さLは、式、
L’=L−rm+rp ………(40)
で補正できる。各実施形態では、この補正後の値を用いて、同じ計算を行えばよい。ただし、計算は、正極板11と負極板12を、面取り円弧の中心点を角の点とする仮想の正極板11’と負極板12’(点線)とみなしているので、計算に用いた所定の定数(cx0、cy0、d、h、clmt)はこれに合わせて変更する必要がある。具体的には、定数cx0、cy0、d、h、clmtは、式、
cx0’=cx0−rm+rp ………(41)
cy0’=cy0−rm+rp ………(42)
d’=d−rp ………(43)
h’=h−rp ………(44)
clmt’=clmt−rm+rp ………(45)
で補正した値を用いる。
【0144】
(変形例4)
各実施形態では、X線管2として、マイクロフォーカスX線管を用いているが他のX線管を用いることもできる。また、各実施形態では、放射線としてX線を用いているが、他の透過性の放射線を用いてもよい。
【符号の説明】
【0145】
1…電池
2…X線管
3…X線ビーム
4,4A,4B,4C…位置決め機構、4a…ホルダ
5…X線検出器、5a…検出面
6,6A,6B,6C…データ処理部
7…機構制御部
11…正極板
12…負極板
13…ケース
14…ゲル状電解液
15…正極リード
16…負極リード
40…放射線検出器
60…電池
61…正極板
62…負極板
【技術分野】
【0001】
本発明は、容器内に層状に正極板(正極の電極板)と負極板(負極の電極板)を交互に配置して成るスタック型の電池の正極板と負極板の位置ずれを検査する電池検査装置に関する。
【背景技術】
【0002】
近年、携帯電話などの機器の発達や電気自動車の実用化でリチウムイオン電池やニッケル水素電池などの二次電池の需要が拡大している。
【0003】
特に、電解液をゲル状にしたリチウムイオンポリマー電池が液漏れし難く、また、エネルギー密度が高い、薄型にできるなどの理由で普及しはじめている。リチウムイオンポリマー電池は平面状の正極板と負極板をセパレータを介して何層も積み上げる構造(以下スタック型)になっている。
【0004】
このリチウムイオンポリマー電池において、正極板が負極板よりはみ出していると、使用しているうちに、はみ出した正極板にリチウムが析出してショートし、発火することがある。そのため、正極板と負極板の位置を保ってずれが生じないようにすることが安全のため重要である。このずれは容器封印後に放射線透視をおこなって検査されている。
【0005】
このようなスタック型電池の放射線透視を行なう従来の電池検査装置としては特許文献1に記載の装置がある。
【0006】
図17は従来のスタック型電池の放射線透視による検査方法を示す模式図である。図17に示すように、まず、電池60の正極板61の長辺に沿ったAA方向に放射線を放射し、放射線検出器40で透過像を検出する。この放射線透過像を画像処理することで、長辺に沿って層ごとに正極板61と負極板62の位置が適正か判定する。次に、電池60の正極板61の短辺に沿ったBB方向に放射線を放射し、同様に、短辺に沿って層ごとに正極板61と負極板62の位置が適正か判定する。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開2004−22206号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
近年、スタック型のリチウムイオンポリマー電池は高容量化する傾向にある。高容量化することで、電極板の大きさは例えば一辺10cmないし30cmと大型化し、正極板と負極板の一組が成す層の厚さは例えば0.15mmと薄層化し、層数も例えば50と増大している(従来は5cm、0.3mm、10層程度)。
【0009】
このため、従来のように電極板の一辺に沿った方向の透視を行うと、一辺が長くなり層も薄くなっているため、電極板の反りの影響で放射線が通りにくくなることで、放射線透過像は不鮮明になり、また電極板の透過像が重なり合ってさらに不鮮明になって検査ができなくなる問題がある。
【0010】
本発明は、上記の問題を解決するためのものであり、その目的は、高容量のスタック型の電池であっても、電極板の位置ずれを検査できる電池検査装置を提供することにある。
【課題を解決するための手段】
【0011】
上記の問題を解決するために請求項1記載の発明は、層をなす複数の四角形の電極板を有する電池の前記電極板の位置ずれを検査する電池検査装置であり、放射線源と、前記放射線源から放射される放射線ビームに前記電極板が沿うように前記電池を位置決めする位置決め手段と、前記電池を透過した前記放射線ビームを検出し透過像として出力する放射線検出器と、前記電極板の第一の角部分を面に沿ってかつ辺に対し傾斜した方向で透過した放射線ビームを検出した第一の透過像と、前記電極板の第二の角部分を面に沿ってかつ辺に対し傾斜した方向で透過した放射線ビームを検出した第二の透過像とを取込んで処理し、前記電極板の位置ずれを検出して良否を判定するデータ処理手段と、を有することを要旨とする。
【0012】
この構成で、電極板の2つの角部分それぞれを、面に沿ってかつ辺に対し傾斜した方向で透過像を撮影(検出と出力)するので、放射線ビームが電極板を透過する長さを短くして透過像を得ることができ、電極板の反りの影響で放射線が通りにくくなることや反りの影響で電極板の像が不鮮明になることを軽減でき、また、撮影した2つの透過像から、平行ずれの前提の下に電極板の位置ずれを検出し良否判定を行うことができ、高容量のスタック型の電池で電極板が大きく薄層であっても、透過像から電極板の位置ずれを検出することが可能となる。
【0013】
上記の問題を解決するために請求項2記載の発明は、層をなす複数の四角形の電極板を有する電池の前記電極板の位置ずれを検査する電池検査装置であり、放射線源と、前記放射線源から放射される放射線ビームに前記電極板が沿うように前記電池を位置決めする位置決め手段と、前記電池を透過した前記放射線ビームを検出し透過像として出力する放射線検出器と、前記電極板の第一の角部分を面に沿ってかつ辺に対し傾斜した2つの方向でそれぞれ透過した放射線ビームを検出した第一の透過像と第二の透過像とを取込んで処理し、前記電極板の位置ずれを検出して良否を判定するデータ処理手段と、を有することを要旨とする。
【0014】
この構成で、電極板の1つの角部分を、面に沿ってかつ辺に対し傾斜した2つの方向でそれぞれ透過像を撮影するので、放射線ビームが電極板を透過する長さを短くして透過像を得ることができ、電極板の反りの影響で放射線が通りにくくなることや反りの影響で電極板の像が不鮮明になることを軽減でき、また、撮影した2つの透過像から、平行ずれの前提の下に電極板の位置ずれを検出し良否判定を行うことができ、高容量のスタック型の電池で電極板が大きく薄層であっても、透過像から電極板の位置ずれを検出することができる。
【0015】
上記の問題を解決するために請求項3記載の発明は、請求項2に記載の電池検査装置において、前記データ処理手段は、前記第一の透過像と前記第二の透過像に加え、前記電極板の第二の角部分を面に沿ってかつ辺に対し傾斜した2つの方向でそれぞれ透過した放射線ビームを検出した第三の透過像と第四の透過像とを取込んで処理し、前記電極板の位置ずれを検出して良否を判定することを要旨とする。
【0016】
この構成で、電極板の2つの角部分それぞれを、面に沿ってかつ辺に対し傾斜した2つの方向でそれぞれ透過像を撮影するので、放射線ビームが電極板を透過する長さを短くして透過像を得ることができ、電極板の反りの影響で放射線が通りにくくなることや反りの影響で電極板の像が不鮮明になることを軽減でき、また、撮影した4つの透過像から、平行ずれおよび回転ずれの前提の下に電極板の位置ずれを検出し良否判定を行うので、高容量のスタック型の電池で電極板が大きく薄層であっても、透過像から電極板の位置ずれを検出することができる。
【0017】
上記の問題を解決するために請求項4記載の発明は、請求項2に記載の電池検査装置において、前記データ処理手段は、前記第一の透過像と前記第二の透過像に加え、前記電極板の第二の角部分を面に沿ってかつ辺に対し傾斜した方向で透過した放射線ビームを検出した第三の透過像を取込んで処理し、前記電極板の位置ずれを検出して良否を判定することを要旨とする。
【0018】
この構成で、電極板の1つの角部分を、面に沿ってかつ辺に対し傾斜した2つの方向でそれぞれ透過像を撮影し、また、他の角部分を面に沿ってかつ辺に対し傾斜した1つの方向で透過像を撮影するので、放射線ビームが電極板を透過する長さを短くして透過像を得ることができ、電極板の反りの影響で放射線が通りにくくなることや反りの影響で電極板の像が不鮮明になることを軽減でき、また、撮影した3つの透過像から、平行ずれおよび回転ずれの前提の下に電極板の位置ずれを検出し良否判定を行うので、高容量のスタック型の電池で電極板が大きく薄層であっても、透過像から電極板の位置ずれを検出することができる。
【0019】
上記の問題を解決するために請求項5記載の発明は、層をなす複数の四角形の電極板を有する電池の前記電極板の位置ずれを検査する電池検査装置であり、放射線源と、前記放射線源から放射される放射線ビームに前記電極板が沿うように前記電池を位置決めする位置決め手段と、前記電池を透過した前記放射線ビームを検出し透過像として出力する放射線検出器と、前記電極板の4つの角部分それぞれを面に沿ってかつ辺に対し傾斜した2つの方向でそれぞれ透過した放射線ビームを検出した8つの透過像を取込んで処理し、前記電極板の位置ずれを検出して良否を判定するデータ処理手段と、を有することを要旨とする。
【0020】
この構成で、電極板の4つの角部分それぞれを、面に沿ってかつ辺に対し傾斜した2つの方向でそれぞれ透過像を撮影するので、放射線ビームが電極板を透過する長さを短くして透過像を得ることができ、電極板の反りの影響で放射線が通りにくくなることや反りの影響で電極板の像が不鮮明になることを軽減でき、また、撮影した8つの透過像から、平行ずれおよび回転ずれおよび電極板の寸法不確定の前提の下に電極板の位置ずれを検出し良否判定を行うので、高容量のスタック型の電池で電極板が大きく薄層であっても、透過像から電極板の位置ずれを検出することができる。
【発明の効果】
【0021】
本発明によれば、高容量のスタック型の電池であっても、電極板の位置ずれを検査できる。
【図面の簡単な説明】
【0022】
【図1】本発明の第一の実施形態の電池検査装置の構成図(平面図)。
【図2】電池1の構造を示す模式図。
【図3】第一の実施形態の検査のフロー図。
【図4】第一の実施形態で得られた透過像を示す模式図。
【図5】第一の実施形態における位置ずれΔx,Δyを求める説明図。
【図6】本発明の第二の実施形態の電池検査装置の構成図(平面図)。
【図7】第二の実施形態の検査のフロー図。
【図8】第二の実施形態における位置ずれΔx,Δyを求める説明図。
【図9】本発明の第三の実施形態の電池検査装置の構成図(平面図)。
【図10】第三の実施形態の検査のフロー図。
【図11】第三の実施形態における位置ずれΔx(i),Δy(i)を求める説明図。
【図12】第三の実施形態の変形例2における位置ずれΔx(2),Δy(2)を求める説明図。
【図13】本発明の第四の実施形態の電池検査装置の構成図(平面図)。
【図14】第四の実施形態の検査のフロー図。
【図15】第四の実施形態における負極板の突出長さcx,cyを求める説明図。
【図16】各実施形態共通の変形例3における電極板に面取りがある場合の補正の説明図(一例)。
【図17】従来のスタック型電池の放射線透視による検査方法を示す模式図。
【発明を実施するための形態】
【0023】
(第一の実施形態の構成)
図1は本発明の第一の実施形態の電池検査装置の構成図(平面図)である。
【0024】
電池検査装置は、電池1の電極板の位置ずれを検査する装置であり、X線管2(放射線源)と、X線管2から放射されるX線ビーム3(放射線ビーム)の中に電池1を位置決めする位置決め機構4と、電池1を透過したX線ビーム3を検出し透過像(透過データ)として出力するX線検出器5(放射線検出器)と、透過像を取り込み電池の電極板の位置ずれを検出し良否を判定するデータ処理部6、データ処理部6からの指令で位置決め機構4を制御する機構制御部7、より成る。また、他の構成として、X線管2に高電圧を供給する高圧発生器や管電圧・管電流を制御するX線制御器、電池1を搬送して位置決め機構4に授受する電池搬送機構、不良と判定した電池を排除する排除機構、X線コリメータやX線遮蔽箱等を有するが、図1では省略している。
【0025】
X線管2としては、例えば、X線ビーム3の発散点であるX線焦点Fの大きさが1μm程度のマイクロフォーカスX線管を用いる。
【0026】
X線検出器5は、2次元の分解能でX線を検出するもので、例えば、X線像を可視光像に変換するX線II(イメージインテンシファイア)と、この可視光像を撮影してデジタルデータとしての透過像を出力する撮像カメラ、及びX線IIと撮像カメラを制御する検出器制御部、等より成る。
【0027】
図2は電池1の構造を示す模式図である。図2(a)は平面図、図2(b)はE−E断面図、図2(c)は図2(b)の一部拡大図である。スタック型の電池1は、例えば、リチウムイオンポリマー電池で、電極板としては角が直角の四角形で、約100×200mmの互いに同一形状の正極板11とこれより数mm大きな互いに同一形状の負極板12が交互に重ねられ、正極板11と負極板12の一組が成す層の厚さは約0.2mmで、約30層が重ねられ、全体は約6mmの厚みになる。
【0028】
正極板11と負極板12の間には薄い樹脂製のセパレータがあるが図では省略されている。電極板(正極板11と負極板12の総称)11、12の全体はアルミとポリプロピレン多層のラミネートフィルムでできたケース13に収納され電極板の間隙にはゲル状電解液14が充填されている。各正極板11には正極リード15が接続され、正極リード15は1本に束ねられて外部に取り出され、各負極板12には同様に負極リード16が接続され、同様に外部に取り出されている。
【0029】
第一の実施形態では、電池1に対し、電極板11、12の第一の角部分C1を電極板11、12の面に沿ってかつ辺に対し45°傾斜した方向P1で透過した放射線ビームを検出した第一の透過像と、電極板11、12の第二の角部分C2を電極板11、12の面に沿ってかつ辺に対し45°傾斜した方向P2で透過した放射線ビームを検出した第二の透過像を撮影する。
【0030】
図1に戻って、位置決め機構4は平板状の電池1を水平面(紙面)に沿ってホルダ4aで保持し、X線ビーム3(のX線光軸L)に電極板11、12の面が沿うように位置決めする。位置決め機構4は、電極板の第一の角部分C1を面に沿ってかつ辺に対し45°傾斜した方向P1でX線ビーム3(のX線光軸L)が透過するよう位置決めし(実線)、さらに、電池1をホルダ4aごと水平面に沿って回転軸RAに対し回転させ、電極板の第二の角部分C2を面に沿ってかつ辺に対し45°傾斜した方向P2でX線ビーム3(のX線光軸L)が透過するよう位置決めする(点線)。
【0031】
機構制御部7はデータ処理部6からの指令で位置決め機構4を制御するとともに、不図示の電池搬送機構や不良と判定した電池を排除する排除機構を制御するほか、これらの機構のステータスをデータ処理部6に送信する。
【0032】
データ処理部6は、例えば、通常のコンピュータであり、CPU、メモリ、インターフェース、キーボードやマウスなどの入力部、表示部、などを持つ。データ処理部6は、記憶している検査プログラムをCPUにより実行し、X線検出器5と機構部制御部7に指令を送信して検査を行う。データ処理部6は、X線検出器5から送られた透過像をメモリに記憶し、CPUにより電極板の位置ずれ検出と判定を実行して電池1ごとに良否判定を行い、不良品の場合、機構制御部7に判定結果として不良品の排除信号を送信する。
【0033】
(第一の実施形態の作用)
図3、図4、図5を参照して、第一の実施の形態における作用を説明する。
【0034】
第一の実施形態は、複数の電極板11、12間の相対的位置ずれを、前提、
{電極板それぞれの形状は正確(辺の長さと角の角度が設計値どおり)で誤差は無視できる}、
{ずれは平行ずれのみ}、
の下に検出するものである。
【0035】
図3は第一の実施形態の検査のフロー図である。検査は、検査プログラムによりデータ処理部6のCPUにより行われる。
【0036】
ステップS1で、位置決め機構4が、電池1を第一の角部分C1を45°傾斜した方向P1でX線ビーム3が透過するよう位置決めし、X線検出器5が透過像を撮影し、データ処理部6が透過像を取込む。
【0037】
図4は第一の実施形態で得られた透過像を示す模式図である。図4(a)は角部分C1、図4(b)は角部分C2の透過像である。
【0038】
ステップS2で、図4(a)を参照して、データ処理部6は、ステップS1で得た角部分C1の透過像を用いて正極板に対する負極板の突出長さL1を求める。突出長さL1は、上から順に、隣接する正極板11負極板12の組み合わせ番号kごとにL1(k)として求める(k=1,2,…K)。以下、便宜的にこの組み合わせ番号kを層番号kと呼ぶことにする。L1(k)は通常の画像処理を用い、例えば、フィルタ処理、2値化、電極板端部の識別と座標求出などを行って求める。
【0039】
なお、正極板が負極板より突出していた場合、突出長さL1(k)はマイナス値とする。また、突出長さL1(k)としては画像上の画素単位の長さを実長に変換して求めるものとする。実長L1(k)は、
実長=画素単位の長さ×検出面上の1画素寸法×FOD/FDD ………(1)
で求められる。ここでFODはX線焦点Fと電池1(の角部分)の距離、FDDはX線焦点FとX線検出器5(検出面5a)との距離である(図1参照)。
【0040】
ステップS3で、位置決め機構4が、電池1を第二の角部分C2を45°傾斜した方向P2でX線ビーム3が透過するよう位置決めし、X線検出器5が透過像を撮影し、データ処理部6が透過像を取込む。
【0041】
ステップS4で、図4(b)を参照して、データ処理部6は、ステップS3で得た角部分C2の透過像を用いて、ステップS2と同様に、上から順に、正極板に対する負極板の突出長さL2(k)を実長で求める(k=1,2,…K)。
【0042】
ステップS5で層番号kのループに入りステップS6,S7をk=1,2,…Kで以下のように繰り返す。
【0043】
ステップS6で、ステップS2、S4で求めたL1(k)、L2(k)から、負極板を基準としたときの正極板の所定位置からの位置ずれΔx,Δyを以下のように求める。
【0044】
図5は第一の実施形態における位置ずれΔx,Δyを求める説明図である。図5は1つの層での正極板11と負極板12の位置関係を示している。
【0045】
図5を参照して、ずれのないときの負極板12の突出量をx、y方向それぞれcx0、cy0とすると、ずれのないときのL1とL2は、式、
L10=cx0・sinθ1+cy0・cosθ1 ………(2)
L20=cx0・cosθ2+cy0・sinθ2 ………(3)
で求められる。ここでθ1=45°、θ2=45°である。
【0046】
次に、L1(k)、L2(k)のずれが無いときからの変化分を、式、
ΔL1(k)=L1(k)−L10 ………(4)
ΔL2(k)=L2(k)−L20 ………(5)
で求める。
【0047】
次に、図5より、ΔL1(k)、ΔL2(k)と正極板の位置ずれΔx,Δyとの間に連立方程式、
ΔL1(k)=−Δx・sinθ1−Δy・cosθ1 ………(6)
ΔL2(k)=Δx・cosθ2−Δy・sinθ2 ………(7)
が成り立つことが導ける。この連立方程式を解くと、式、
Δx={ΔL2(k)・cosθ1−ΔL1(k)・sinθ2}/cos(θ1−θ2) ………(8)
Δy={−ΔL2(k)・sinθ1−ΔL1(k)・cosθ2}/cos(θ1−θ2) ………(9)
が求められる。
【0048】
すなわち、ステップS6で、式(2)ないし式(5)、及び、式(8)、式(9)を順次計算することで、層kにおける正極板のずれΔx,Δyが求められる。
【0049】
ステップS7で、層別の良否判定を以下のように行う。
ずれの許容値をx、y方向でそれぞれΔxlmt、Δylmtとして、
|Δx|<Δxlmt、かつ、|Δy|<Δylmt
のとき層kについて、良品とし、他の場合不良品とする。
【0050】
ステップS8で、全kについてループが終了してない場合はステップS5にもどりkを変えてステップS6,S7を繰り返し、全kについて終了した場合はステップS9に進む。
【0051】
ステップS9では、総合の良否判定を行う。総合の良否判定は全層kで良品と判定されたときのみ総合で良品と判定することで行われる。
【0052】
以上の検査のフローにより、全層で負極板の突出長さが、xの正負方向で規定値(cx0−Δxlmt)以上、かつ、yの正負方向で規定値(cy0−Δylmt)以上となる電池1のみが良品と判定される。
【0053】
(第一の実施形態の効果)
第一の実施形態によれば、電極板の2つの角部分それぞれを、面に沿ってかつ辺に対し45°傾斜した方向で透過像を撮影するので、放射線ビームが電極板を透過する長さを短くして透過像を得ることができ、電極板の反りの影響で放射線が通りにくくなることや反りの影響で電極板の像が不鮮明になることを軽減でき、また、撮影した2つの透過像から、平行ずれの前提の下に電極板の位置ずれを検出し良否判定を行うことができ、高容量のスタック型の電池で電極板が大きく薄層であっても、透過像から電極板の位置ずれを検出することが可能となる。
【0054】
(第一の実施形態の変形)
(変形例1)
第一の実施形態では、電極板の面に沿ってかつ辺に対し45°傾斜した方向で角部分を撮影しているが、必ずしも45°でなくてもよい。図5を参照して、傾斜角θ1、θ2が45°のときX線ビームが電極板を透過する長さは最小となり最良であるが、45°から離れたときこの長さの増加は緩やかで、傾斜角θ1、θ2は大まかに45°程度であれば良く、例えば約20°ないし70°の範囲に設定可能である。
【0055】
(変形例2)
第一の実施形態では、2つの角部分について透過像を撮影しているが、3つ以上の角部分について面に沿ってかつ辺に対し45°傾斜した方向で透過像を撮影し、これらの透過像から電極板の位置ずれを検出するようにしてもよい。これにより、統計精度を上げて位置ずれを検出することができる。ここで、位置ずれΔx、Δyを求める計算としては、例えば、角部分の2つの組み合わせを変えて、それぞれから第一の実施形態と同様に位置ずれを求め、求めた位置ずれを平均して最終的な位置ずれΔx,Δyとすることで行うことができる。
【0056】
(変形例3)
図3を参照して、第一の実施形態では、kループ(ステップS5ないしS8)を全層について計算しているが、ステップS7の層別の良否判定で不良と判定されたとき、ループを終了させステップS9の総合判定に移るようにしてもよい。1つの層でも不良があった場合、総合判定で不良になるからである。
【0057】
(変形例4)
第一の実施形態では、2つの角部分についてそれぞれθ1、θ2傾斜した方向で撮影しているが、さらに他の1つの角部分をθ3傾斜した方向で撮影し、3つの透過像から、回転ずれも含めて位置ずれを検出することが可能である。この場合、平行ずれΔxp,Δypと回転ずれαを未知数として3つの方程式を立てることができる。この方程式は、すこし複雑であるが、方程式の数値解析により解いて位置ずれを求めることができる。
【0058】
この方式を採用する場合は、θ1,θ2,θ3は、45°でなく、透過方向が電極板の長いほうの辺と概略20°前後で交差するように設定すると精度が上がる。
【0059】
(第二の実施形態の構成)
図6は本発明の第二の実施形態の電池検査装置の構成図(平面図)である。第一の実施の形態と同じ構成は同じ番号を付し、説明は省略する。図6の位置決め機構4Aは図1の位置決め機構4から電池1を位置決めする動作のみが異なる。また、図6のデータ処理部6Aは図1のデータ処理部6から検査プログラムのみが異なる。
【0060】
位置決め機構4Aは平板状の電池1を水平面(紙面)に沿ってホルダ(不図示)で保持し、X線ビーム3(のX線光軸L)に電極板11,12の面が沿うように位置決めする。位置決め機構4Aは、電池1を、電極板の第一の角部分C1を面に沿ってかつ辺に対しθ1傾斜した方向でX線ビーム3(のX線光軸L)が透過するよう位置決めし(実線)、さらに、ホルダごと水平面に沿って回転軸RAに対し回転させ、電極板の角部分C1を面に沿ってかつ辺に対しθ2傾斜した方向でX線ビーム3(のX線光軸L)が透過するよう位置決めする(点線)。
【0061】
(第二の実施形態の作用)
図7、図8を参照して、第二の実施の形態における作用を説明する。
【0062】
第二の実施形態は、複数の電極板11、12間の相対的位置ずれを、第一の実施形態と同じ前提、
{電極板それぞれの形状は正確で誤差は無視できる}、
{ずれは平行ずれのみ}、
の下に検出するものである。
【0063】
図7は第二の実施形態の検査のフロー図である。検査は、検査プログラムによりデータ処理部6AのCPUにより行われる。
【0064】
ステップS11で、位置決め機構4Aが、電極板の第一の角部分C1をθ1傾斜した方向でX線ビーム3が透過するよう電池1を位置決めし、X線検出器5が透過像を撮影し、データ処理部6Aが透過像を取込む。得られた透過像は図4(a)と同等である。
【0065】
ステップS12で、図4(a)を参照して、データ処理部6Aは、ステップS11で得た角部分C1の透過像を用いて正極板に対する負極板の突出長さL1を求める。突出長さL1は、第一実施形態と同様に、層kごとに実長で、上から順に、L1(k)として求める(k=1,2,…K)。
【0066】
ステップS13で、位置決め機構4Aが、電極板の第一の角部分C1をθ2傾斜した方向でX線ビーム3が透過するよう電池1を位置決めし、X線検出器5が透過像を撮影し、データ処理部6Aが透過像を取込む。得られた透過像は図4(a)と同等である。
【0067】
ステップS14で、図4(a)を参照して、データ処理部6Aは、ステップS13で得た角部分C1の透過像を用いて正極板に対する負極板の突出長さL2を求める。突出長さL2は、第一実施形態と同様に、層kごとに実長で、上から順に、L2(k)として求める(k=1,2,…K)。
【0068】
ステップS15で、層番号kのループに入りステップS16,S17をk=1,2,…Kで以下のように繰り返す。
【0069】
ステップS16で、ステップS12、S14で求めたL1(k)、L2(k)から、負極板を基準としたときの正極板の所定位置からの位置ずれΔx,Δyを以下のように求める。
【0070】
図8は第二の実施形態における位置ずれΔx,Δyを求める説明図である。図8は1つの層での正極板11と負極板12の位置関係を示している。
【0071】
図8を参照して、ずれのないときの負極板12の突出量をx、y方向それぞれcx0、cy0とすると、L1(k)、L2(k)と正極板の位置ずれΔx,Δyとの間に連立方程式、
L1(k)=(cx0−Δx)・sinθ1+(cy0−Δy)・cosθ1
………(10)
L2(k)=(cx0−Δx)・sinθ2+(cy0−Δy)・cosθ2
………(11)
が成り立つことが導ける。この連立方程式を解くと、式、
Δx=cx0+{L1(k)・cosθ2−L2(k)・cosθ1}/sin(θ2−θ1) ………(12)
Δy=cy0−{L1(k)・sinθ2−L2(k)・sinθ1}/sin(θ2−θ1) ………(13)
が求められる。
【0072】
すなわち、ステップS16で、式(12)、式(13)を計算することで、層kにおける正極板のずれΔx,Δyが求められる。
【0073】
ステップS17で、層別の良否判定を以下のように行う。
ずれの許容値をx、y方向でそれぞれΔxlmt、Δylmtとして、
|Δx|<Δxlmt、かつ、|Δy|<Δylmt
のとき層kについて、良品とし、他の場合不良品とする。
【0074】
ステップS18で、全kについてループが終了してない場合はステップS15にもどりkを変えてステップS16,S17を繰り返し、全kについて終了した場合はステップS19に進む。
【0075】
ステップS19では、総合の良否判定を行う。総合の良否判定は全層kで良品と判定されたときのみ総合で良品と判定することで行われる。
【0076】
以上の検査のフローにより、全層で負極板の突出長さが、xの正負方向で規定値(cx0−Δxlmt)以上、かつ、yの正負方向で規定値(cy0−Δylmt)以上となる電池1のみが良品と判定される。
【0077】
(第二の実施形態の効果)
第二の実施形態によれば、電極板の1つの角部分を、面に沿ってかつ辺に対し傾斜した2つの方向でそれぞれ透過像を撮影するので、放射線ビームが電極板を透過する長さを短くして透過像を得ることができ、電極板の反りの影響で放射線が通りにくくなることや反りの影響で電極板の像が不鮮明になることを軽減でき、また、撮影した2つの透過像から、平行ずれの前提の下に電極板の位置ずれを検出し良否判定を行うことができ、高容量のスタック型の電池で電極板が大きく薄層であっても、透過像から電極板の位置ずれを検出することが可能となる。
【0078】
(第二の実施形態の変形)
(変形例1)
第二の実施形態で、傾斜角θ1、θ2は任意に設定でき、θ1、θ2の差が大きい、すなわち90°に近いほうがΔx、Δyが精度よく求められるが、θ1、θ2それぞれが0°あるいは90°に近いとX線ビームが電極板を透過する長さが長くなり透過像が不鮮明になってしまう。そこで、傾斜角θ1、θ2は、一方が概略20°前後、他方が概略70°前後とするのがよい。
【0079】
(変形例2)
第二の実施形態では、1つの角部分について2方向の透過像を撮影しているが、2つ以上の角部分について面に沿ってかつ辺に対し傾斜した2つの方向でそれぞれ透過像を撮影し、これらの透過像から電極板の位置ずれを検出するようにしてもよい。これにより、統計精度を上げて位置ずれを検出することができる。ここで、位置ずれΔx、Δyを求める計算としては、例えば、角部分を変えて、それぞれから第二の実施形態と同様に位置ずれを求め、求めた位置ずれを平均して最終的な位置ずれΔx、Δyとすることで行うことができる。
【0080】
(変形例3)
図7を参照して、第二の実施形態では、kループ(ステップS15ないしS18)を全層について計算しているが、ステップS17の層別の良否判定で不良と判定されたとき、ループを終了させステップS19の総合判定に移るようにしてもよい。1つの層でも不良があった場合、総合判定で不良になるからである。
【0081】
(第三の実施形態の構成)
図9は本発明の第三の実施形態の電池検査装置の構成図(平面図)である。第一の実施の形態と同じ構成は同じ番号を付し、説明は省略する。図9の位置決め機構4Bは図1の位置決め機構4から電池1を位置決めする動作のみが異なる。また、図9のデータ処理部6Bは図1のデータ処理部6から検査プログラムのみが異なる。
【0082】
位置決め機構4Bは平板状の電池1を水平面(紙面)に沿ってホルダ(不図示)で保持し、X線ビーム3(のX線光軸L)に電極板11、12の面が沿うように、位置決めする。位置決め機構4Bは、第一の角部分C1を回転軸RA上に配置した状態で電池1をホルダごと水平面に沿って回転軸RAに対し回転させ、電極板の第一の角部分C1を面に沿ってかつ辺に対しθ1及びθ2傾斜した方向それぞれでX線ビーム3が透過するよう2つの位置で位置決めし(実線)、さらに、電池1をホルダごと水平面に沿って移動させ第二の角部分C2を回転軸RA上に配置させてから、電池1を回転軸RAに対し回転させ、電極板の角部分C2を面に沿ってかつ辺に対しθ3及びθ4傾斜した方向それぞれでX線ビーム3が透過するよう2つの位置で位置決めする(点線)。
【0083】
(第三の実施形態の作用)
図10、図11を参照して、第三の実施の形態における作用を説明する。
【0084】
第三の実施形態は、複数の電極板11、12間の相対的位置ずれを、前提、
{電極板それぞれの形状は正確で誤差は無視できる}、
{ずれは平行ずれと回転ずれを含む}、
の下に検出するものである。
【0085】
図10は第三の実施形態の検査のフロー図である。検査は、検査プログラムによりデータ処理部6BのCPUにより行われる。
【0086】
ステップS21で、位置決め機構4Bが、電極板の第一の角部分C1をθ1およびθ2傾斜した方向それぞれでX線ビーム3が透過するよう電池1を位置決めし、それぞれで、X線検出器5が透過像を撮影し、データ処理部6Bが透過像を取込む。得られた2つの透過像はそれぞれ図4(a)と同等である。
【0087】
ステップS22で、図4(a)を参照して、データ処理部6Bは、ステップS21で得た角部分C1の2つの透過像を用いて正極板に対する負極板の突出長さL1とL2をそれぞれ求める。突出長さL1、L2は、第一実施形態と同様に、層kごとに実長で、上から順に、L1(k)、L2(k)として求める(k=1,2,…K)。
【0088】
ステップS23で、位置決め機構4Bが、電極板の第二の角部分C2をθ3およびθ4傾斜した方向それぞれでX線ビーム3が透過するよう電池1を位置決めし、それぞれで、X線検出器5が透過像を撮影し、データ処理部6Bが透過像を取込む。得られた2つの透過像はそれぞれ図4(b)と同等である。
【0089】
ステップS24で、図4(b)を参照して、データ処理部6Bは、ステップS23で得た角部分C2の2つの透過像を用いて正極板に対する負極板の突出長さL3とL4をそれぞれ求める。突出長さL3、L4は、第一実施形態と同様に、層kごとに実長で、上から順に、L3(k)、L4(k)として求める(k=1,2,…K)。
【0090】
ステップS25で、層番号kのループに入りステップS26,S27をk=1,2,…Kで以下のように繰り返す。
【0091】
ステップS26で、ステップS22、S24で求めたL1(k)、L2(k)、L3(k)、L4(k)から、負極板を基準としたときの正極板の4つの頂点の所定位置からの位置ずれΔx(i),Δy(i)、(i=1,2,3,4)を以下のように求める。
【0092】
図11は第三の実施形態における位置ずれΔx(i),Δy(i)を求める説明図である。図11は1つの層での正極板11と負極板12の位置関係を示している。
【0093】
図11を参照して、ずれのないときの負極板12の突出量をx、y方向それぞれcx0、cy0とすると、角部分C1での正極板の頂点Aの位置ずれΔx(1),Δy(1)は、L1(k)、L2(k)を用いて、第二実施形態と同様に、式、
Δx(1)=cx0+{L1(k)・cosθ2−L2(k)・cosθ1}/sin(θ2−θ1) ………(14)
Δy(1)=cy0−{L1(k)・sinθ2−L2(k)・sinθ1}/sin(θ2−θ1) ………(15)
で求められる。同様に、角部分C2での正極板の頂点Bの位置ずれΔx(2),Δy(2)は、L3(k)、L4(k)を用いて、第二実施形態と同様に、式、
Δx(2)=−cx0+{L3(k)・sinθ4−L4(k)・sinθ3}/sin(θ4−θ3) ………(16)
Δy(2)=cy0+{L3(k)・cosθ4−L4(k)・cosθ3}/sin(θ4−θ3) ………(17)
で求められる。(式(14)、式(15)で、Δx(1),Δy(1),cx0,cy0,L1,L2,θ1,θ2をそれぞれΔy(2),−Δx(2),cy0,cx0,L3,L4,θ3,θ4で置き換えることで式(16)、式(17)が得られる。)
【0094】
次に、正極板11(頂点A,B,C,D)の各辺の長さを2d、2hとし、平行ずれをΔxp、Δyp、回転ずれをαとすると、図11を参照して、連立方程式、
Δx(1)=Δxp+h・sinα−d・(1−cosα) ………(18)
Δy(1)=Δyp−d・sinα−h・(1−cosα) ………(19)
Δx(2)=Δxp+h・sinα+d・(1−cosα) ………(20)
Δy(2)=Δyp+d・sinα−h・(1−cosα) ………(21)
がなりたつことが導ける。この連立方程式の未知数はα、Δxp、Δypの3つで、方程式の数は4つで冗長性があるが、精度の上がる解を選択すると、α、Δxp、Δypの解として、式、
α=asin{(Δy(2)−Δy(1))/2d} ………(22)
Δxp=(Δx(2)+Δx(1))/2−(Δy(2)−Δy(1))・h/2d
………(23)
Δyp=(Δy(2)+Δy(1))/2+h・(1−cosα) ………(24)
が得られる。次に、得られたα、Δxp、Δypを用いて、角部分C3での正極板の頂点Cの位置ずれΔx(3),Δy(3)、および、角部分C4での正極板の頂点Dの位置ずれΔx(4),Δy(4)は、図11を参照して、式、
Δx(3)=Δxp−h・sinα+d・(1−cosα) ………(25)
Δy(3)=Δyp+d・sinα+h・(1−cosα) ………(26)
Δx(4)=Δxp−h・sinα−d・(1−cosα) ………(27)
Δy(4)=Δyp−d・sinα+h・(1−cosα) ………(28)
で求められる。
【0095】
すなわち、ステップS26で、式(14)ないし式(17)、及び、式(22)ないし式(28)を順次計算することで、層kにおける正極板の4つの頂点の所定位置からの位置ずれΔx(i),Δy(i)、(i=1,2,3,4)が求められる。
【0096】
ステップS27で、層別の良否判定を以下のように行う。ずれの許容値をx、y方向でそれぞれΔxlmt、Δylmtとして、
(Δx(1)<Δxlmt、)かつ、(Δy(1)<Δylmt)、かつ、
(−Δxlmt<Δx(2))、かつ、(Δy(2)<Δylmt)、かつ、
(−Δxlmt<Δx(3))、かつ、(−Δylmt<Δy(3))、かつ、
(Δx(4)<Δxlmt、)、かつ、(−Δylmt<Δy(4))、
のとき層kについて、良品とし、他の場合不良品とする。
【0097】
ステップS28で、全kについてループが終了してない場合はステップS25にもどりkを変えてステップS26,S27を繰り返し、全kについて終了した場合はステップS29に進む。
【0098】
ステップS29では、総合の良否判定を行う。総合の良否判定は全層kで良品と判定されたときのみ総合で良品と判定することで行われる。
【0099】
以上の検査のフローにより、全層で負極板の突出長さが、xの正負方向で規定値(cx0−Δxlmt)以上、かつ、yの正負方向で規定値(cy0−Δylmt)以上となる電池1のみが良品と判定される。
【0100】
(第三の実施形態の効果)
第三の実施形態によれば、電極板の2つの角部分それぞれを、面に沿ってかつ辺に対し傾斜した2つの方向でそれぞれ透過像を撮影するので、放射線ビームが電極板を透過する長さを短くして透過像を得ることができ、電極板の反りの影響で放射線が通りにくくなることや反りの影響で電極板の像が不鮮明になることを軽減でき、また、撮影した4つの透過像から、平行ずれおよび回転ずれの前提の下に電極板の位置ずれを検出し良否判定を行うので、高容量のスタック型の電池で電極板が大きく薄層であっても、透過像から電極板の位置ずれを検出することが可能となる。
【0101】
すなわち、第三の実施形態によれば、高容量のスタック型の電池に対し、電極板の平行ずれだけでなく回転ずれがある場合でも電極板の位置ずれを検出することが可能となる。
【0102】
(第三の実施形態の変形)
(変形例1)
第三の実施形態で、第二実施形態と同様に、傾斜角θ1、θ2、θ3、θ4は任意に設定できる。θ1、θ2(あるいはθ3、θ4)の設定による精度の違いも第二実施形態と同様であり、傾斜角θ1、θ2(あるいはθ3、θ4)は、一方が概略20°前後、他方が概略70°前後とするのがよい。
【0103】
(変形例2)
第三の実施形態で、第二の角部分C2を2方向で撮影しているが、第二の角部分C2については面に沿ってかつ辺に対しθ3傾斜した方向のみの撮影としてもよい。それは、冗長性なくせば、3つの透過像で方程式を立てることができ、位置ずれが解けるからである。
【0104】
すなわち、変形例2では角部分C1を方向θ1、θ2で、角部分C2を方向θ3で撮影した3つの画像から、それぞれ負極板の突出長さL1(k)、L2(k)、L3(k)を求め、L1(k)、L2(k)、L3(k)から、層kごとに正極板の4つの頂点の所定位置からの位置ずれΔx(i),Δy(i)、(i=1,2,3,4)を求める。
【0105】
この場合、まず、頂点Aの位置ずれΔx(1),Δy(1)を、式(14)、式(15)で求める。次に、頂点Bの位置ずれΔx(2),Δy(2)を求める。
【0106】
図12は第三の実施形態の変形例2における位置ずれΔx(2),Δy(2)を求める説明図である。図12は1つの層での正極板11の頂点A、Bのずれを示している。A、Bのずれる前の点をそれぞれA0、B0とし、B0を原点にxy座標を取る。まず、L3(k)の、ずれがない時からの変化分ΔL3(k)は、式、
ΔL3(k)=L3(k)−(cx0・cosθ3+cy0・sinθ3)
………(29)
で求められる。ΔL3(k)を用いて、図12を参照して、Line1とCircle1の交点がB点(Δx(2),Δy(2))であるので、Δx(2),Δy(2)を求める連立方程式、
Δy(2)=Δx(2)・cotθ3−ΔL3(k)/sinθ3 ………(30)
{Δx(2)−(2d+Δx(1))}2+{Δy(2)−Δy(1)}2=4d2
………(31)
が成り立つことが導ける。これを解くと、
a=1+cot2θ3 ………(32)
b=2d+Δx(1)+cotθ3・{ΔL3(k)/sinθ3+Δy(1)}
………(33)
c={2d+Δx(1)}2+{ΔL3(k)/sinθ3+Δy(1)}2−4d2 ………(34)
Δx(2)={b−√(b2−a・c)}/a ………(35)
でΔx(2)が求まり、さらに、求めたΔx(2)を式(30)に代入してΔy(2)が求まる。
【0107】
なお、θ3は45°より大きく90°に近い角度にすると、Line1とCircle1が直角に近い角度で交わるので、Δx(2),Δy(2)が精度よく求められるが、90°に近過ぎるとX線ビームが電極板を透過する長さが長くなり透過像が不鮮明になってしまので、例えば70°程度とする。
【0108】
以上のように、式(14)、式(15)、式(29)、式(32)乃至式(35)、及び式(30)を順次計算してΔx(1),Δy(1),Δx(2),Δy(2)が求められる。
【0109】
以下、第三の実施形態と同様に式(22)ないし式(28)を計算して、位置ずれΔx(i),Δy(i)、(i=1,2,3,4)全てを求めることができる。
【0110】
変形例2によれば、透過像の撮影を1つ少なくでき、かつ、第三の実施形態と同じ効果をあげることができる。
【0111】
(変形例3)
第三の実施形態で、2つの角部分をそれぞれ2方向で撮影しているが、3つ以上の角部分をそれぞれ2方向で撮影してもよい。また、少なくとも1つの角部分で2方向撮影すれば残りの角部分は1方向撮影とすることもできる。透過像が3つを超えると冗長性が生じるが、余剰の透過像を統計精度を上げるために用いることができる。
【0112】
(変形例4)
図10を参照して、第三の実施形態では、kループ(ステップS25ないしS28)を全層について計算しているが、ステップS27の層別の良否判定で不良と判定されたとき、ループを終了させステップS29の総合判定に移るようにしてもよい。1つの層でも不良があった場合、総合判定で不良になるからである。
【0113】
(第四の実施形態の構成)
図13は本発明の第四の実施形態の電池検査装置の構成図(平面図)である。第一の実施の形態と同じ構成は同じ番号を付し、説明は省略する。図13の位置決め機構4Cは図1の位置決め機構4から電池1を位置決めする動作のみが異なる。また、図13のデータ処理部6Cは図1のデータ処理部6から検査プログラムのみが異なる。
【0114】
位置決め機構4Cは平板状の電池1を水平面(紙面)に沿ってホルダ(不図示)で保持し、X線ビーム3(のX線光軸L)に電極板11、12の面が沿うように位置決めし、電池1をホルダごと水平面に沿って平行移動させるとともにX線光軸L上の回転軸RAに対し水平面に沿って回転させて位置決めする。具体的には、位置決め機構4Cは、電極板の4つの角部分Ci(i=1,2,3,4)それぞれを回転軸RAに合わせるように電池1を平行移動させ、さらに回転軸RAに対し回転させ、それぞれの角部分Ciを面に沿ってかつ辺に対し傾斜した2つの方向θ1(i),θ2(i)(実線と点線)でそれぞれ放射線ビーム3(のX線光軸L)が透過するように8つの位置決めをする。
【0115】
(第四の実施形態の作用)
図14、図15を参照して、第四の実施の形態における作用を説明する。
【0116】
第四の実施形態は、複数の電極板11、12間の相対的位置ずれを、前提、
{電極板それぞれの形状は不正確で誤差は無視できない}、
{ずれは平行ずれと回転ずれを含む}、
の下に検出するものである。
【0117】
図14は第四の実施形態の検査のフロー図である。検査は、検査プログラムによりデータ処理部6CのCPUにより行われる。
【0118】
ステップS31で、角部分Ci(i=1,2,3,4)のループに入りステップS32ないし,S38をi=1,2,3,4で以下のように繰り返す。
【0119】
ステップS32で、位置決め機構4Cが、電極板の角部分Ciをθ1(i)およびθ2(i)傾斜した方向それぞれでX線ビーム3が透過するよう電池1を位置決めし、それぞれで、X線検出器5が透過像を撮影し、データ処理部6Cが透過像を取込む。得られた2つの透過像はそれぞれ図4(a)と同等である。
【0120】
ステップS33で、図4(a)を参照して、データ処理部6Cは、ステップS32で得た角部分Ciの2つの透過像を用いて正極板に対する負極板の突出長さL1とL2をそれぞれ求める。突出長さL1、L2は、第一実施形態と同様に、層kごとに実長で、上から順に、L1(k)、L2(k)として求める(k=1,2,…K)。
【0121】
ステップS34で、層番号kのループに入りステップS35,S36をk=1,2,…Kで以下のように繰り返す。
【0122】
ステップS35で、ステップS33で求めたL1(k)、L2(k)から、正極板頂点から負極板のx,y方向の突出長さcx,cyを以下のように求める。
【0123】
図15は第四の実施形態における負極板の突出長さcx,cyを求める説明図である。図15は角部Ciの1つの層での正極板11と負極板12の位置関係を示している。
【0124】
図15を参照して、連立方程式、
L1=cx・sinθ1+cy・cosθ1 ………(36)
L2=cx・sinθ2+cy・cosθ2 ………(37)
が導ける。これをcx,cyについて解くと、式、
cx=(L1・cosθ2−L2・cose1)/sin(θ1−θ2)
………(38)
cy=(L1・sinθ2−L2・sinθ1)/sin(θ2−θ1)
………(39)
となる。
【0125】
ステップS35では、式(38)、(39)を計算することで、cx,cyが求められる。
【0126】
ステップS36で層別の良否判定を行う。良否判定は、判定基準をclmtとして、
cx>clmt、かつ、cy>clmt
のとき良品、他のとき不良品とする。
【0127】
ステップS37で、全kについてループが終了してない場合はステップS34にもどりkを変えてステップS35,S36を繰り返し、全kについて終了した場合はステップS38に進む。
【0128】
ステップS38では、角部分Ciでの良否判定を行う。角部分Ciでの良否判定は全層kで良品と判定されたときのみCiで良品と判定することで行われる。
【0129】
ステップS39で全iについてループが終了してない場合はステップS31にもどり、iを変えてステップS32ないしS38を繰り返し、全iについて終了した場合はステップS40に進む。
【0130】
ステップS40では、総合の良否判定を行う。総合の良否判定は全角部分Ciで良品と判定されたときのみ総合で良品と判定することで行われる。
【0131】
以上の検査のフローにより、全角部分の全層で正極板頂点からの負極板の突出長さが、x方向で規定値clmt以上、かつ、y方向で規定値clmt以上となる電池1のみが良品と判定される。
【0132】
(第四の実施形態の効果)
第四の実施形態によれば、電極板の4つの角部分それぞれを、面に沿ってかつ辺に対し傾斜した2つの方向でそれぞれ透過像を撮影するので、放射線ビームが電極板を透過する長さを短くして透過像を得ることができ、電極板の反りの影響で放射線が通りにくくなることや反りの影響で電極板の像が不鮮明になることを軽減でき、また、撮影した8つの透過像から、平行ずれおよび回転ずれおよび電極板の寸法不確定の前提の下に電極板の位置ずれを検出し良否判定を行うので、高容量のスタック型の電池で電極板が大きく薄層であっても、透過像から電極板の位置ずれを検出することが可能となる。
【0133】
すなわち、第四の実施形態によれば、高容量のスタック型の電池に対し、電極板の平
行ずれだけでなく回転ずれおよび電極板の寸法不確定がある場合でも電極板の位置ずれを検出することが可能となる。
【0134】
(第四の実施形態の変形)
(変形例1)
第四の実施形態で、第二実施形態と同様に、傾斜角θ1、θ2は任意に設定できる。θ1、θ2の設定による精度の違いも第二実施形態と同様であり、傾斜角θ1、θ2は、一方が概略20°前後、他方が概略70°前後とするのがよい。
【0135】
(変形例2)
図14を参照して、第四の実施形態では、kループ(ステップS34ないしS37)を全層について計算しているが、ステップS36の層別の良否判定で不良と判定されたとき、ループを終了させステップS38のCiでの良否判定、あるいはステップS40の総合判定に移るようにしてもよい。1つの層でも不良があった場合、Ciでの良否判定と総合判定で不良になるからである。
【0136】
また、同様に、第四の実施形態では、iループ(ステップS31ないしS39)を全角部分Ciについて計算しているが、ステップS38のCiでの良否判定で不良と判定されたとき、ループを終了させステップS40の総合判定に移るようにしてもよい。角部分で1つでも不良があった場合、総合判定で不良に成るからである。
【0137】
(第一ないし第四の実施形態共通の変形)
以下に、第一ないし第四の実施形態に共通する変形例を示す。
【0138】
(変形例1)
各実施形態では、図4を参照して、角部分の透過像を全層が視野に入るように撮影しているが、層と直交する方向に何画像かに分割して撮影するようにしても良い。これは、電池1、X線管2、X線検出器5のいずれか1つ以上を層と直交する方向に移動させて撮影することで行う。これにより、電池1が厚くなった場合でも、拡大率を下げることなく全層の透過像が得られる。
【0139】
(変形例2)
各実施形態では、X線IIと撮像カメラで構成されたX線検出器5を用いているが、2次元分解能のX線検出器であればよく、例えば、半導体光センサアレイとシンチレータを用いたFPD(フラットパネルディテクタ)、あるいは半導体X線センサアレイを用いたFPDでもよい。また、マイクロチャンネルプレートと撮像カメラで構成されたX線検出器などを用いてもよい。
【0140】
また、X線検出器5の代わりに、1次元分解能のX線検出器(X線ラインセンサ)5Aを用いることもできる。この場合は、例えば、図1を参照して、X線ビーム3の水平方向(紙面に沿った方向)の広がりを分解して検出するようにX線検出器5Aを配置し、電池1、X線管2、X線検出器5Aのいずれか1つ以上を垂直方向に走査させながら複数点で1次元の透過像を撮影し、これを合成することで2次元の透過像を得るようにする。
【0141】
さらに、1次元分解能のX線検出器5Aを用いる場合、分解能方向を、X線ビーム3の中心(X線光軸L)に対して略直交する任意方向(垂直や斜め方向)に配置してもよい。この場合、電池1、X線管2、X線検出器5Aのいずれか1つ以上を分解能方向に直交する方向に走査させながら複数点で1次元の透過像を撮影し、これを合成することで2次元の透過像を得るようにできる。
【0142】
(変形例3)
各実施形態では、四角形の電極板を有するスタック型の電池を検査しているが、四角形の電極板としては、角部分に面取り(平面または曲面)が施されているものも含むものとする。面取りがある場合でも、各実施形態の作用どおりに位置ずれが検出できるが、面取りが大きくなると誤差が生じてくる。この場合、面取りの形状が既知であれば、面取りを考慮して計算誤差を補正することができる。
【0143】
図16は各実施形態共通の変形例3における電極板に面取りがある場合の補正の説明図(一例)である。図16は1つの層における正極板11と負極板12の位置関係を示している。面取りは円弧状(円筒面)として、正極板で面取り半径rp、負極板で面取り半径rmとすると、測定した負極板の突出長さLは、式、
L’=L−rm+rp ………(40)
で補正できる。各実施形態では、この補正後の値を用いて、同じ計算を行えばよい。ただし、計算は、正極板11と負極板12を、面取り円弧の中心点を角の点とする仮想の正極板11’と負極板12’(点線)とみなしているので、計算に用いた所定の定数(cx0、cy0、d、h、clmt)はこれに合わせて変更する必要がある。具体的には、定数cx0、cy0、d、h、clmtは、式、
cx0’=cx0−rm+rp ………(41)
cy0’=cy0−rm+rp ………(42)
d’=d−rp ………(43)
h’=h−rp ………(44)
clmt’=clmt−rm+rp ………(45)
で補正した値を用いる。
【0144】
(変形例4)
各実施形態では、X線管2として、マイクロフォーカスX線管を用いているが他のX線管を用いることもできる。また、各実施形態では、放射線としてX線を用いているが、他の透過性の放射線を用いてもよい。
【符号の説明】
【0145】
1…電池
2…X線管
3…X線ビーム
4,4A,4B,4C…位置決め機構、4a…ホルダ
5…X線検出器、5a…検出面
6,6A,6B,6C…データ処理部
7…機構制御部
11…正極板
12…負極板
13…ケース
14…ゲル状電解液
15…正極リード
16…負極リード
40…放射線検出器
60…電池
61…正極板
62…負極板
【特許請求の範囲】
【請求項1】
層をなす複数の四角形の電極板を有する電池の前記電極板の位置ずれを検査する電池検査装置であり、
放射線源と、前記放射線源から放射される放射線ビームに前記電極板が沿うように前記電池を位置決めする位置決め手段と、
前記電池を透過した前記放射線ビームを検出し透過像として出力する放射線検出器と、
前記電極板の第一の角部分を面に沿ってかつ辺に対し傾斜した方向で透過した放射線ビームを検出した第一の透過像と、前記電極板の第二の角部分を面に沿ってかつ辺に対し傾斜した方向で透過した放射線ビームを検出した第二の透過像とを取込んで処理し、前記電極板の位置ずれを検出して良否を判定するデータ処理手段と、
を有することを特徴とする電池検査装置。
【請求項2】
層をなす複数の四角形の電極板を有する電池の前記電極板の位置ずれを検査する電池検査装置であり、
放射線源と、前記放射線源から放射される放射線ビームに前記電極板が沿うように前記電池を位置決めする位置決め手段と、
前記電池を透過した前記放射線ビームを検出し透過像として出力する放射線検出器と、
前記電極板の第一の角部分を面に沿ってかつ辺に対し傾斜した2つの方向でそれぞれ透過した放射線ビームを検出した第一の透過像と第二の透過像とを取込んで処理し、前記電極板の位置ずれを検出して良否を判定するデータ処理手段と、
を有することを特徴とする電池検査装置。
【請求項3】
請求項2に記載の電池検査装置において、
前記データ処理手段は、
前記第一の透過像と前記第二の透過像に加え、前記電極板の第二の角部分を面に沿ってかつ辺に対し傾斜した2つの方向でそれぞれ透過した放射線ビームを検出した第三の透過像と第四の透過像とを取込んで処理し、前記電極板の位置ずれを検出して良否を判定することを特徴とする電池検査装置。
【請求項4】
請求項2に記載の電池検査装置において、
前記データ処理手段は、
前記第一の透過像と前記第二の透過像に加え、前記電極板の第二の角部分を面に沿ってかつ辺に対し傾斜した方向で透過した放射線ビームを検出した第三の透過像を取込んで処理し、前記電極板の位置ずれを検出して良否を判定することを特徴とする電池検査装置。
【請求項5】
層をなす複数の四角形の電極板を有する電池の前記電極板の位置ずれを検査する電池検査装置であり、
放射線源と、前記放射線源から放射される放射線ビームに前記電極板が沿うように前記電池を位置決めする位置決め手段と、
前記電池を透過した前記放射線ビームを検出し透過像として出力する放射線検出器と、
前記電極板の4つの角部分それぞれを面に沿ってかつ辺に対し傾斜した2つの方向でそれぞれ透過した放射線ビームを検出した8つの透過像を取込んで処理し、前記電極板の位置ずれを検出して良否を判定するデータ処理手段と、
を有することを特徴とする電池検査装置。
【請求項1】
層をなす複数の四角形の電極板を有する電池の前記電極板の位置ずれを検査する電池検査装置であり、
放射線源と、前記放射線源から放射される放射線ビームに前記電極板が沿うように前記電池を位置決めする位置決め手段と、
前記電池を透過した前記放射線ビームを検出し透過像として出力する放射線検出器と、
前記電極板の第一の角部分を面に沿ってかつ辺に対し傾斜した方向で透過した放射線ビームを検出した第一の透過像と、前記電極板の第二の角部分を面に沿ってかつ辺に対し傾斜した方向で透過した放射線ビームを検出した第二の透過像とを取込んで処理し、前記電極板の位置ずれを検出して良否を判定するデータ処理手段と、
を有することを特徴とする電池検査装置。
【請求項2】
層をなす複数の四角形の電極板を有する電池の前記電極板の位置ずれを検査する電池検査装置であり、
放射線源と、前記放射線源から放射される放射線ビームに前記電極板が沿うように前記電池を位置決めする位置決め手段と、
前記電池を透過した前記放射線ビームを検出し透過像として出力する放射線検出器と、
前記電極板の第一の角部分を面に沿ってかつ辺に対し傾斜した2つの方向でそれぞれ透過した放射線ビームを検出した第一の透過像と第二の透過像とを取込んで処理し、前記電極板の位置ずれを検出して良否を判定するデータ処理手段と、
を有することを特徴とする電池検査装置。
【請求項3】
請求項2に記載の電池検査装置において、
前記データ処理手段は、
前記第一の透過像と前記第二の透過像に加え、前記電極板の第二の角部分を面に沿ってかつ辺に対し傾斜した2つの方向でそれぞれ透過した放射線ビームを検出した第三の透過像と第四の透過像とを取込んで処理し、前記電極板の位置ずれを検出して良否を判定することを特徴とする電池検査装置。
【請求項4】
請求項2に記載の電池検査装置において、
前記データ処理手段は、
前記第一の透過像と前記第二の透過像に加え、前記電極板の第二の角部分を面に沿ってかつ辺に対し傾斜した方向で透過した放射線ビームを検出した第三の透過像を取込んで処理し、前記電極板の位置ずれを検出して良否を判定することを特徴とする電池検査装置。
【請求項5】
層をなす複数の四角形の電極板を有する電池の前記電極板の位置ずれを検査する電池検査装置であり、
放射線源と、前記放射線源から放射される放射線ビームに前記電極板が沿うように前記電池を位置決めする位置決め手段と、
前記電池を透過した前記放射線ビームを検出し透過像として出力する放射線検出器と、
前記電極板の4つの角部分それぞれを面に沿ってかつ辺に対し傾斜した2つの方向でそれぞれ透過した放射線ビームを検出した8つの透過像を取込んで処理し、前記電極板の位置ずれを検出して良否を判定するデータ処理手段と、
を有することを特徴とする電池検査装置。
【図1】



【図2】

【図3】

【図4】

【図5】

【図6】

【図7】
【図8】
【図9】
【図10】

【図11】
【図12】
【図13】

【図14】
【図15】

【図16】
【図17】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【公開番号】特開2011−39014(P2011−39014A)
【公開日】平成23年2月24日(2011.2.24)
【国際特許分類】
【出願番号】特願2009−196002(P2009−196002)
【出願日】平成21年8月6日(2009.8.6)
【出願人】(391017540)東芝ITコントロールシステム株式会社 (107)
【Fターム(参考)】
【公開日】平成23年2月24日(2011.2.24)
【国際特許分類】
【出願日】平成21年8月6日(2009.8.6)
【出願人】(391017540)東芝ITコントロールシステム株式会社 (107)
【Fターム(参考)】
[ Back to top ]