
電池駆動装置、電池駆動方法およびプログラム
【課題】電池残量と供給電圧の関係を考慮した制御によりデバイスの動作時間を延長させることができる電池駆動装置、電池駆動方法およびプログラムを提供する。
【解決手段】無線センサシステムは、センサノード1と基地局2から構成される。センサノード1と基地局2は、無線で通信する。センサノード1は、送受信部101、通信制御部102、ノード制御部103、電池計測部104、情報格納部105、選択部106、計測部107およびデータ生成部108を備える。電池計測部104は、電池の電圧を計測する。情報格納部105は、電池の所定の切替電圧の情報、および作動シーケンスごとの1回の動作の放電量および電圧低下量の情報を併せて記憶する。選択部106は、電池の電圧が切替電圧以上の場合に放電量が最小の作動シーケンスを、電池の電圧が切替電圧未満の場合に電圧低下量が最小の作動シーケンスを選択する。
【解決手段】無線センサシステムは、センサノード1と基地局2から構成される。センサノード1と基地局2は、無線で通信する。センサノード1は、送受信部101、通信制御部102、ノード制御部103、電池計測部104、情報格納部105、選択部106、計測部107およびデータ生成部108を備える。電池計測部104は、電池の電圧を計測する。情報格納部105は、電池の所定の切替電圧の情報、および作動シーケンスごとの1回の動作の放電量および電圧低下量の情報を併せて記憶する。選択部106は、電池の電圧が切替電圧以上の場合に放電量が最小の作動シーケンスを、電池の電圧が切替電圧未満の場合に電圧低下量が最小の作動シーケンスを選択する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、電池駆動装置、電池駆動方法およびプログラムに関する。
【背景技術】
【0002】
一般的に、無線センサネットワークの構成要素であるセンサノードは、乾電池やボタン電池を電力供給源として作動し、ひとたび設置されると、センサノード周囲のデータ、例えば温度や湿度データを基地局へ一定周期で送信するといった動作を繰り返す。センサノードの電池が切れた場合の充電作業や、電池の交換作業等の手間を省くため、センサノードは数ヶ月ないし数年間、ときにはそれ以上動作することが望まれる。
【0003】
そのため、センサノードは自身の放電量を抑え、電池の消耗を減らすことが必要となる。すなわち、センサノードの省電力化を図り低電力で動作させることにより、センサノードを長期間に渡って動作させることが必要となる。
【0004】
特許文献1では、電源であるバッテリの電力残量に応じて通信機能を選択・限定する省電力制御方式に関する携帯無線電話装置が記載されている。携帯無線電話装置のバッテリ電源の消耗を軽減し、省電力化を図るために、バッテリ電源の電力の残量に対応して、あるいは、その出力電圧レベルに応じて、通信機能を選択・限定し、バッテリ残量が多い場合は通常の通信機能を実行し、また間欠受信周期は通常の時間間隔とし、バッテリ残量が中位の場合は着呼処理のみの通信機能とし、また間欠受信周期は通常の時間間隔より少し長い中位の時間間隔とし、バッテリ残量が少ない場合は着信記録のみの通信機能とし、間欠受信周期は通常の時間間隔よりも長くする方法である。
【0005】
特許文献2では、バッテリの出力電圧がある値より低下すると短時間のうちに動作不能な電圧まで低下する事を改善するバッテリ駆動可能な情報処理装置が記載されている。その方法は、バッテリの出力電圧を常時監視する電圧監視回路に監視電圧値を設定し、バッテリ出力電圧が設定値より低下した場合に、電圧監視回路からの情報によりCPUに供給するクロック周波数を落とすか、CPUに対してウエイト信号を供給することによりCPUの消費電力を抑えて、システムの駆動時間を長くする方法である。
【0006】
特許文献3では、電子情報機器の消費電力をより少なくできるプロセッサが記載されている。その技術は、クロック発振器に周波数制御信号を発し、その周波数制御信号に応じた周波数で動作するとともに、電源回路に電圧要求信号を発し、その電圧要求信号に応じた電圧で動作するプロセッサにおいて、クロック周波数と、電源電圧と、電源が有する電源効率(η)とによって規定される、単位データ処理について消費エネルギーが最小となる動作領域においてプロセッサ自身が動作するように、供給されるクロック周波数及び電源電圧を制御する技術である。
【0007】
特許文献4では、電子装置または通信装置の消費電力を低減する制御装置が記載されている。その方法は、制御装置は、通信装置と、該通信装置を用いて通信を行う電子装置と、を制御する制御装置であって、前記電子装置及び前記通信装置の動作状態と前記制御装置への要求を含む情報とに基づいて、前記電子装置及び前記通信装置の制御を行う複数の制御プロファイル中から前記電子装置と前記通信装置との少なくとも一方の消費電力を略最小にする動作を規定する制御プロファイルを選択するプロファイル選択部を備える方法である。
【0008】
特許文献5では、一般的な省電力の概念を超え、電池をより長時間使用可能な電池駆動無線通信型検出器端末が記載されている。その技術は、内蔵の電池により作動し外部の物理量の情報を取得する複数の検出器を有し監視装置と無線通信によりデータの授受を行う無線通信型検出器端末において、前記電池から前記検出器への通電制御を行う検出器制御CPU及び前記検出器制御CPUへの通電制御を行う電源制御CPUを設けたものであり、検出器の電源を検出器制御CPUでオン・オフでき、検出器を使用しないときに電源を切断することにより、電力消費を押える方法である。
【先行技術文献】
【特許文献】
【0009】
【特許文献1】特開平10−209953号公報
【特許文献2】特開2001−5572号公報
【特許文献3】特開2004−303206号公報
【特許文献4】特開2006−48630号公報
【特許文献5】特開2007−235839号公報
【発明の概要】
【発明が解決しようとする課題】
【0010】
関連する技術では、消費電力の低減により装置の長時間作動を可能としていた。しかし、電圧降下の影響や、行う動作処理の種類により、電池の残量がある場合であっても装置が作動できなくなるなどの不具合が生じていた。
【0011】
本発明は、上述の事情に鑑みてなされたもので、電池残量と供給電圧の関係を考慮した制御によりデバイスの動作時間を延長させることができる電池駆動装置、電池駆動方法およびプログラムを提供することを目的とする。
【課題を解決するための手段】
【0012】
本発明の第1の観点に係る電池駆動装置は、
同時に作動可能な2以上のデバイスを含む複数のデバイスと、
前記複数のデバイスを駆動する電力を給電する電池と、
前記複数のデバイスを駆動する1回の動作で、前記複数のデバイスのうち2以上のデバイスを同時に作動させるシーケンスと、当該2以上のデバイスのうち少なくとも1つを異なる時間に作動させるシーケンスと、を含む2以上の作動シーケンスから1つの作動シーケンスを選択する選択手段と、
前記電池の公称電圧と動作可能最低電圧の間の所定の切替電圧の情報を記憶する手段と、
前記作動シーケンスごとの、1回の動作の放電量および電圧低下量の情報を取得する情報取得手段と、
前記電池の電圧を計測する計測手段と、
前記選択手段で選択した作動シーケンスに従って、前記複数のデバイスを駆動する手段と、
を備え、
前記選択手段は、前記電池の電圧が前記切替電圧以上の場合に、前記放電量が最小の作動シーケンスを選択し、前記電池の電圧が前記切替電圧未満の場合に、前記電圧低下量が最小の作動シーケンスを選択する、
ことを特徴とする。
【0013】
本発明の第2の観点に係る電池駆動方法は、
同時に作動可能な2以上のデバイスを含む複数のデバイスを、電池で駆動する電池駆動装置が行う電池駆動方法であって、
前記複数のデバイスを駆動する1回の動作で、前記複数のデバイスのうち2以上のデバイスを同時に作動させるシーケンスと、当該2以上のデバイスのうち少なくとも1つを異なる時間に作動させるシーケンスと、を含む2以上の作動シーケンスから1つの作動シーケンスを選択する選択ステップと、
前記電池の公称電圧と動作可能最低電圧の間の所定の切替電圧の情報を取得するステップと、
前記作動シーケンスごとの、1回の動作の放電量および電圧低下量の情報を取得する情報取得ステップと、
前記電池の電圧を計測する計測ステップと、
前記選択ステップで選択した作動シーケンスに従って、前記複数のデバイスを駆動するステップと、
を備え、
前記選択ステップは、前記電池の電圧が前記切替電圧以上の場合に、前記放電量が最小の作動シーケンスを選択し、前記電池の電圧が前記切替電圧未満の場合に、前記電圧低下量が最小の作動シーケンスを選択する、
ことを特徴とする。
【0014】
本発明の第3の観点に係るプログラムは、
コンピュータに、
電池の公称電圧と動作可能最低電圧の間の所定の切替電圧の情報を取得するステップと、
複数のデバイスを駆動する1回の動作で、前記複数のデバイスのうち2以上のデバイスを同時に作動させるシーケンスと、当該2以上のデバイスのうち少なくとも1つを異なる時間に作動させるシーケンスと、を含む2以上の作動シーケンスごとの、1回の動作の放電量および電圧低下量の情報を取得する情報取得ステップと、
前記電池の電圧を計測する計測ステップと、
前記電池の電圧が前記切替電圧以上の場合に、前記放電量が最小の作動シーケンスを選択し、前記電池の電圧が前記切替電圧未満の場合に、前記電圧低下量が最小の作動シーケンスを選択する選択ステップと、
前記選択ステップで選択した作動シーケンスに従って、前記複数のデバイスを駆動するステップと、
を実行させることを特徴とする。
【発明の効果】
【0015】
本発明によれば、電池残量と供給電圧の関係を考慮した制御によりデバイスの動作時間を延長させることができる。
【図面の簡単な説明】
【0016】
【図1】本発明の実施の形態1に係る無線センサシステムの構成例を示すブロック図である。
【図2】乾電池やボタン型電池で駆動する無線通信を行う電池駆動装置の一例を示す構成概略図である。
【図3】図2に係る電池駆動装置の作動シーケンスの一例を示す図である。
【図4】電池特性情報の一例を示す図である。
【図5】センサノード特性情報の作動シーケンスに関する情報の一例を示す図である。
【図6】実施の形態1に係る無線センサシステムの、センサノードの動作処理の一例を示すフローチャートである。
【図7】本発明の実施の形態2に係る無線センサシステムの構成例を示すブロック図である。
【図8】センサノードの動作時間比較の一例を示す図である。
【図9】実施の形態2に係るセンサノードの動作時間の一例を示す図である。
【図10】図9に係るセンサノードの動作時間の一例を示す図である。
【図11】実施の形態2に係るセンサノードの動作時間のその他の例を示す図である。
【図12】図11に係るセンサノードの動作時間の一例を示す図である。
【図13】実施の形態2に係る無線センサシステムの、センサノードの動作処理の一例を示すフローチャートである。
【図14】本発明の実施の形態に係る無線センサシステムの、センサノードの物理的な構成例を示すブロック図である。
【図15】本発明の実施の形態に係る無線センサシステムの、基地局の物理的な構成例を示すブロック図である。
【発明を実施するための形態】
【0017】
以下、本発明の実施の形態について図面を参照しながら詳細に説明する。なお、図中同一または相当部分には同一符号を付す。
【0018】
本発明において、作動シーケンスとは、複数のデバイスを作動させるシーケンスをいい、作動シーケンスを実行することにより、その動作は処理される。特に、デバイスがセンサであって、センサを作動し計測を行う場合において、その作動シーケンスを計測シーケンスという。
【0019】
また、複数のデバイスのうち、少なくとも2つは同時に作動させることができる。また、同時に作動させることができるデバイスのうち、少なくとも1つは、異なる時間に作動させることができる。本発明の電池駆動装置は、これらのシーケンスを含む2つ以上の作動シーケンスから1つを選択して実行可能である。
【0020】
(実施の形態1)
図1は、本発明の実施の形態1に係る無線センサシステムの構成例を示すブロック図である。本発明の実施の形態において、電池駆動装置は無線センサシステムのセンサノードを例に挙げて説明する。また、電池駆動装置、ここではセンサノードをさす、に備える複数のデバイスのいずれかに、計測を行うセンサを含むものとする。
【0021】
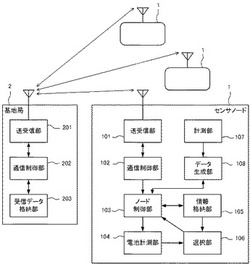
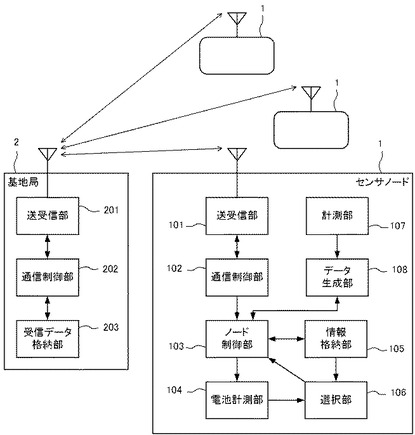
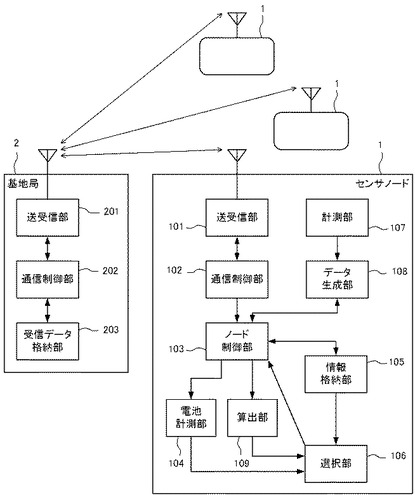
無線センサシステムは、センサノード1と基地局2から構成される。センサノード1と基地局2は、無線で通信する。1つの基地局2と複数のセンサノード1が通信する場合がある。
【0022】
センサノード1は、送受信部101、通信制御部102、ノード制御部103、電池計測部104、情報格納部105、選択部106、計測部107およびデータ生成部108を備える。
【0023】
センサノード1は、例えば、それが設置された場所の温度、湿度、照度、圧力、雰囲気ガス濃度または音響レベルなどを計測するセンサを備え計測部107で検出する。計測部107で検出したデータを基地局2に無線で送信する。以降、センサノード1が基地局2に送信するデータを生成データという。基地局2は、各センサノード1から受信した生成データを蓄積し、図示しないサーバに送信したり、生成データを表示したり、そこで生成データの分析を行ったりする。
【0024】
送受信部101は、基地局2の送受信部201と無線でデータを送受信する。また、送受信部101は、基地局2からデータを受信すると、通信制御部102へ送る。
【0025】
データ生成部108は決められたタイミングで、前述したようにセンサで計測し計測部107で検出したデータから基地局2に送信すべきデータ(生成データ)を生成する。データ生成部108は、生成データを通信制御部102に送る。
【0026】
通信制御部102は、生成データを基地局2に送受信部101から送信する。
【0027】
ノード制御部103は、センサノード1の制御を行う。制御には、センサノード1の動作状態と待機状態の切替を含む。待機状態から動作状態へ切り替わることを復帰という。また、動作状態から待機状態へ切り替わることを遷移という。
【0028】
電池計測部104は、ノード制御部103の制御により、センサノード1の電池量を計測する。電池量の計測は、電池の電圧の計測を含む。
【0029】
情報格納部105は、電池特性およびセンサノード特性を含む情報を格納する。また、その他必要な情報があれば格納する。電池特性は、切替電圧の情報を含み、センサノード特性は、センサノード1の作動シーケンスごとの、1回の動作の放電量および電圧低下量の情報を含む。
【0030】
選択部106は、電池計測部104で計測した電池の電圧と、情報格納部105に格納された情報とを基に、センサノード1に最適な作動シーケンスを選択し、ノード制御部103へ伝送する。
【0031】
より詳しくは、電池の電圧が切替電圧以上の場合に、放電量が最小の作動シーケンスを選択し、電池の電圧が切替電圧未満の場合に、電圧低下量が最小の作動シーケンスを選択する。そして選択部106は、選択した作動シーケンスをノード制御部103へ伝送する。
【0032】
センサノード1を起動した初期には、通信する無線チャネルが空いている(搬送波の受信レベルが限界以下に小さい)ときに生成データの送信を開始し、以降は、決められたタイミングで生成データの送信を行う。あるいは、最初に基地局2を探索して通信周期の同期を確立したのち、生成データの送信を行う。
【0033】
一方、基地局2は、送受信部201、通信制御部202および受信データ格納部203を備える。基地局2の送受信部201は、センサノード1の送受信部101と無線でデータを送受信する。送受信部201は、センサノード1から生成データを受信すると、通信制御部202へ送る。通信制御部202は、受信した生成データを受信データ格納部203に記憶させる。
【0034】
このようにして、受信データ格納部203には、センサノード1から受信した生成データがセンサノード1ごとに時系列に記憶される。記憶する生成データには、受信した時刻または受信する予定の時刻を付してもよい。
【0035】
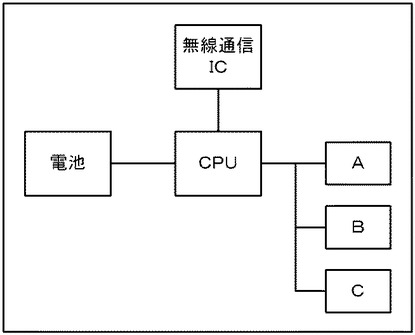
図2は、乾電池やボタン型電池で駆動する無線通信を行う電池駆動装置の一例を示す構成概略図である。制御を行うCPU(Central Processing Unit)、電池、無線通信を行う無線通信IC(Integrated Circuit)および各処理A,B,Cに対応する外部装置を備える。各処理A,B,Cに対応する外部装置のいずれかもしくは複数に、計測を行うセンサ(図1におけるセンサノード1の計測部107に該当)を備えていてもよい。
【0036】
乾電池やボタン型電池には、連続最大放電量と連続標準負荷が規定されており、連続最大放電量とは、電池が連続して発生することのできる最大の電流量をいう。連続標準負荷とは、電池が想定された環境下において、標準的に発生することのできる電流量をいう。
【0037】
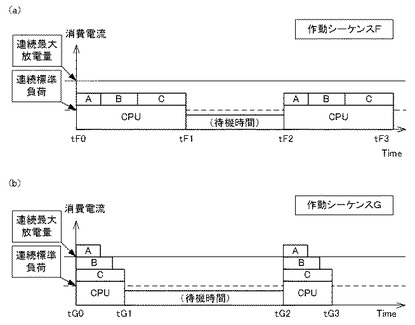
図3は、図2に係る電池駆動装置の作動シーケンスの一例を示す図である。異なった2つの作動シーケンスF,Gについて、図3(a)は作動シーケンスFの消費電流の変化を表し、図3(b)は作動シーケンスGの消費電流の変化を表す。作動シーケンスFでは、外部装置A,B,Cをそれぞれ順次処理した後に待機状態に遷移させ間欠動作を行う。作動シーケンスGでは、外部装置A,B,Cを同時に処理した後に待機状態に遷移させ間欠動作を行う。間欠動作の間は待機時間となり、連続標準負荷より小さい消費電流で済むため、一定の割合で低下した電源電圧を回復することができる。
【0038】
作動シーケンスFと作動シーケンスGを比較すると、作動シーケンスGの方が同時に処理を行うことでCPUの駆動する時間を短縮できるので放電量は少ない。しかし作動シーケンスGにおいて瞬間に消費する電流は大きく連続最大放電量を超えており、このとき電圧降下が発生する。電池駆動装置の電池の電圧が切替電圧未満となった場合において、作動シーケンスGではなく作動シーケンスFを選択することで、放電量は大きくなるが、連続最大放電量を抑えられ、電圧降下の発生を抑制できるので、電池の残量の電源電圧をより長時間使用することが可能となる。
【0039】
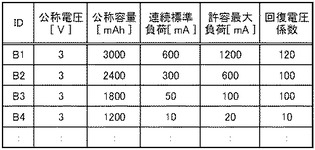
図4は、電池特性情報の一例を示す図である。電池特性情報とは、センサノードに接続された電池を通常の状態で使用した場合に得られる端子間の電圧の目安である公称電圧、一般的にその電池が持つ容量の目安である公称容量(放電容量)、電池が想定された環境下において標準的に発生することのできる電流量を示す連続標準負荷、電池が瞬間的に発生することのできる最大負荷を示す許容最大負荷、センサノード待機時の回復電圧係数の情報を指す。
【0040】
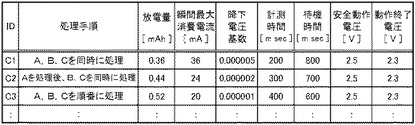
図5は、センサノード特性情報の作動シーケンスに関する情報の一例を示す図である。作動シーケンスに関する情報とは、センサノードの処理手順(作動シーケンス)、シーケンス実行中の放電量、シーケンス実行中の瞬間最大消費電流、シーケンス実行後に降下する電圧値を算出する基となる数値である降下電圧基数、シーケンスの開始から終了までにかかる時間を示す計測時間、シーケンス終了時から次のシーケンス開始時までの時間を示す待機時間、搭載する機器の標準的な動作電圧(動作可能最低電圧)と、搭載する機器が動作しなくなる電圧(動作終了電圧)の情報を指す。放電量は、シーケンス実行中の消費電流を計測時間で積分した値である。
【0041】
作動シーケンスIDがC1である作動シーケンスは、最も放電量が少ないシーケンスであるが、瞬間最大消費電流は最も高く、降下電圧基数も大きい。逆に、作動シーケンスIDがC3である作動シーケンスは最も放電量が多いシーケンスであるが、瞬間最大消費電流量は最も低く、降下電圧基数も低い。
【0042】
なお、降下電圧基数は、作動シーケンスの各処理を行った際に電池に発生する降下電圧を、以下の式にて計算できると定義した上で、実験的に求めた値である。
降下電圧=降下電圧基数×搭載電池の回復電圧係数
【0043】
図4および図5に示す電池特性情報およびセンサノード特性情報を含む情報は、センサノードの情報格納部105に格納して記憶される。
【0044】
図1ないし図5を用いて、センサノードの動作処理を説明する。動作処理は、センサを用いて計測を行う処理を含む。
【0045】
センサノード1はセンサ計測処理を開始すると、ノード制御部103はセンサノード1を待機状態から動作状態へ復帰させる。次に、ノード制御部103は、情報格納部105を参照し、電池特性情報とセンサノード1のセンサノード特性情報の作動シーケンスに関する情報を取得する。ここではセンサノード1は、図4の電池特性情報IDがB3の電池を搭載しているものとする。ノード制御部103は電池情報特性を蓄積しておき、次回以降の計測の際に、電池特性情報の取得を省略してもよい。同様に、ノード制御部103は作動シーケンスに関する情報を蓄積しておき、次回以降の計測の際に、作動シーケンスに関する情報の取得を省略してもよい。
【0046】
電池特性情報IDがB3の電池の場合、センサノード1で作動シーケンスIDがC1の処理を行う(図5参照)場合、作動シーケンスIDがC1の処理を一回処理すると、
0.000005(降下電圧基数)×100(回復電圧係数)=0.0005(降下電圧)
となり、0.0005V電源電圧が降下することが分かる。
【0047】
ノード制御部103は、情報格納部105より作動シーケンスに関する情報を取得すると、電池計測部104へセンサノード1の電池の電圧計測の指示を行う。選択部106は、電池計測部104が計測した電池の電圧と、作動シーケンスに関する情報の動作電圧と比較し、作動シーケンスの選択を行う。
【0048】
計測電圧が切替電圧以上の値であれば、選択部106は電池特性情報を元に、放電量が最小の作動シーケンスを選択する。すなわち選択部106は、最も低電力である作動シーケンスを選択する。
【0049】
作動シーケンスに関する情報に記載の処理の瞬間最大消費電流は、搭載する電池の許容最大負荷以下であるので、作動シーケンスに関する情報に記載の処理の作動シーケンスIDがC1,C2,C3である処理は、センサノード1において実行可能な処理であることがわかる。
【0050】
また、作動シーケンスに関する情報の放電量の項を見ると、作動シーケンスIDがC2,C3である処理に比べ、作動シーケンスIDがC1である処理の放電量は最も小さい値となっている。従って、作動シーケンスに関する情報の中で最も放電量の少ない作動シーケンスIDがC1である処理を選択する。
【0051】
センサノード1に搭載した電池の電池特性情報IDがB3である電池の例を示したが、IDがB4である電池の許容最大負荷は20mAであるため、作動シーケンスIDがC3である作動シーケンスのみ選択される。
【0052】
計測電圧が切替電圧未満の場合、選択部106は電池特性情報を元に、電圧低下量が最小の作動シーケンスを選択する。すなわち選択部106は、最も電圧降下が少ない作動シーケンスを選択する。
【0053】
作動シーケンスに関する情報の降下電圧基数の項を見ると、作動シーケンスIDがC1,C2である処理に比べ、作動シーケンスIDがC3である処理の降下電圧基数は最も小さい値となっている。作動シーケンスIDがC1,C2,C3である処理は、同じ電池、すなわち電池特性情報IDがB3である電池を用いて実行されるため、選択可能な処理のうち、作動シーケンスIDがC3である処理が最も降下電圧の少ない作動シーケンスである。従って、作動シーケンスに関する情報の中で最も電圧降下が少ない作動シーケンスIDがC3である処理を選択する。
【0054】
選択部106が作動シーケンスを選択し、ノード制御部103は、その作動シーケンスに従い計測部107へセンサ計測要求を送る。データ生成部108は、計測結果を送信できるデータの形に生成して送信データとし、通信制御部102の指示により送受信部101から基地局2へ向けて送信する。通信制御部102は、送信が完了した事をノード制御部103へ通知してもよい。
【0055】
ノード制御部103は、センサノード1で計測したデータを基地局2へ送信した後、センサノード1の放電量を低減するとともに、センサノード1に搭載した電池の電圧を回復させるため、所定の時間、センサノード1を待機状態にするように指示し、センサノード1は動作状態から待機状態へ遷移する。所定時間が経過すると、センサノード1は待機状態から動作状態へ復帰し、上述の処理を行う。そして、この一連の流れの処理を、搭載する電池残量がなくなるまで繰り返す。
【0056】
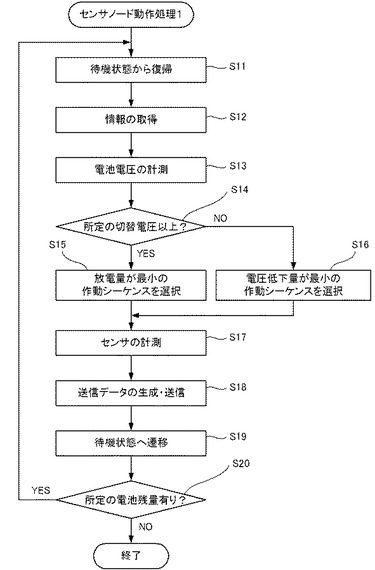
図6は、実施の形態1に係る無線センサシステムの、センサノードの動作処理の一例を示すフローチャートである。本発明に係る電池駆動装置はセンサノードを例に挙げており、電池駆動装置であるセンサノードで行う様々な処理の中で、所望の動作処理は、センサでの計測処理を指す。
【0057】
無線センサシステムの基地局2の動作処理については、通信制御部202は送受信部201を介してセンサノード1のデータ送信を待ち受けし、データを受信すると受信データ格納部203に格納するという動作を繰り返す。
【0058】
まず、ノード制御部103は、待機状態にあるセンサノード1を動作状態へ復帰させ(ステップS11)、ノード制御部103は、情報格納部105のデータ情報を取得する(ステップS12)。データ情報は、電池特性情報とセンサノード1のセンサノード特性情報の作動シーケンスに関する情報を含む。そして、電池計測部104はセンサノード1の電池の電圧を計測する(ステップS13)。
【0059】
計測した電池電圧が所定の切替電圧の値以上ならば(ステップS14;YES)、選択部106は放電量が最小の作動シーケンスを選択する(ステップS15)。また、このとき、計測した電池電圧が所定の切替電圧の値以上でなければ(ステップS14;NO)、選択部106は電圧低下量が最小の作動シーケンスを選択する(ステップS16)。
【0060】
ノード制御部103は、選択された作動シーケンスに沿って計測部107を制御し、計測部107はセンサの計測を行う(ステップS17)。センサの計測を終えると、データ生成部108は、計測部107のセンサの計測結果より送信できるデータの形に変換し送信データを生成し、送受信部101を介して通信制御部102により基地局2へ向けて生成データを送信する(ステップS18)。
【0061】
ノード制御部103は、通信制御部102によりデータ送信が終わると、センサノード1を動作状態から待機状態へ遷移させる(ステップS19)。そして、動作に可能な所定の電池量があれば(ステップS20;YES)、センサノード1を所定時間待機させた後にステップS11に戻り、センサノード動作処理1の処理を繰り返す。動作に可能な所定の電池量がなくなれば(ステップS20;NO)、センサノード1の処理を終了する。
【0062】
以上説明したように、本実施の形態1の無線センサシステムによれば、電池残量と供給電圧の関係を考慮した制御が可能となり、結果としてセンサノードの動作時間を延長させることができる。
【0063】
バッテリの特性を考慮した動作手順を繰り返し、バッテリの供給電圧が電子機器の駆動電圧より低くなる可能性がある時に、待機状態におけるバッテリの電圧回復特性を考慮した処理に切り替えることで、バッテリを最大限に活用でき、長時間センサノードが動作することを可能とする。
【0064】
(実施の形態2)
図7は、本発明の実施の形態2に係る無線センサシステムの構成例を示すブロック図である。図1の無線センサシステムと基本的な構成は同じであり、センサノード1に算出部109を追加して備える。
【0065】
算出部109は、計測電圧値と作動シーケンス情報と電池特性情報をもとに、動作回数を算出する。本発明に係る電池駆動装置において、電池駆動装置を1時間に1回動作させることを想定しており、動作回数をそのまま動作時間として用いる場合がある。
【0066】
詳しくは、算出部109は、作動シーケンスごとの動作回数とその作動シーケンスの放電量の積の和が、電池の公称容量を超えない範囲で、電池の公称電圧と、公称電圧以下で動作可能最低電圧以上の基準電圧との差を最小放電量の作動シーケンスの電圧低下量で除した値と、基準電圧と動作可能最低電圧との差を最小の電圧低下量で除した値と、の合計が最大になる基準電圧を、切替電圧として算出する。
【0067】
この関係は以下のように表せる。電池の公称電圧をVo、動作可能最低電圧をVe、電池の公称容量をDとする。作動シーケンスの最小の放電量をdi、その作動シーケンスの電圧低下量をfiとし、作動シーケンスの最小の電圧低下量をfa、その作動シーケンスの放電量をdaとする。一般に、di ≦ da、 fi ≧ faである。そうして、切替電圧をv(Vo≧v≧Ve)として、
di・(Vo − v)/fi + da・(v − Ve)/fa ≦ D
の範囲で、
(Vo − v)/fi + (v − Ve)/fa
が最大になるvを切替電圧として設定する。
【0068】
ここで、特殊な場合について考える。いま、
da・(Vo − Ve)/fa ≦ D
ならば、切替電圧v=Voとして、すべて最小の電圧低下量の作動シーケンスで動作させれば動作回数は最大になる。また、
da・(Vo − Ve)/fa > D
かつ、
di・(Vo − Ve)/fi > D
ならば、動作回数は、作動シーケンスの放電量だけで決まり、D/diが最大の動作回数になる。この場合は、v=Veと考えることができる。
【0069】
上述の特殊な場合の中間、すなわち、
da・(Vo − Ve)/fa > D
でかつ、
di・(Vo − Ve)/fi ≦ D
の場合には、Vo≧v≧Veなるvで、
di・(Vo − v)/fi + da・(v − Ve)/fa ≦ D
の範囲で、
(Vo − v)/fi + (v − Ve)/fa
が最大になるvが存在する。そのvを切替電圧として設定することができる。以下、具体的な例を用いて説明する。
【0070】
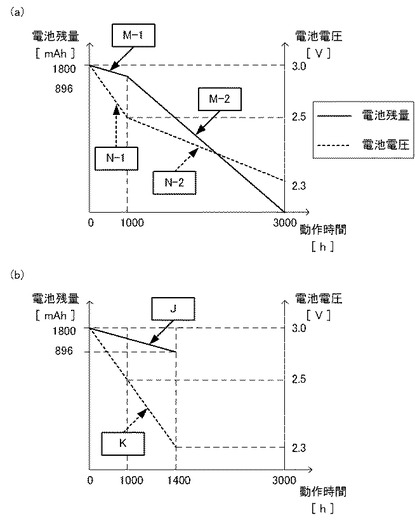
図8は、センサノード動作時間比較の一例を示す図である。図8(a)は本実施形態に係る電子機器の省電力方法、図8(b)従来の省電力方法の、放電量削減を示す。図8でセンサノード動作時間比較のために、センサノードが動作した際の動作時間と、搭載するバッテリの状態、すなわち電池容量と電池電圧の時間変化を示す。ここでは、動作していない時間に、電池の電圧が降下電圧計数×回復電圧計数までに回復するように、1時間に1回、動作させることを想定している。図8の動作時間は動作回数をも表している。
【0071】
従来手法による処理は、最も放電量の少ない処理を繰り返すため電池容量は多い(図8(b)J)が、電池電圧は、電圧降下によりセンサノードの動作可能最低電圧である2.3V以下となる(図8(b)K)ため、バッテリに電力量が残っているにも関らず1400時間しかセンサノードを動作させることができない。
【0072】
一方、本実施形態による処理は、最初は従来手法と同様に作動シーケンスIDがC1である処理を繰り返し、電池容量をセーブしている(図8(a)M−1,N−1)。しかし、動作時間が1000時間を越えたところで、放電量は増えるが電圧降下の影響が少ない作動シーケンスIDがC3である処理に切り替える(図8(a)M−2,N−2)ため、結果として電池容量を残さず使い切り、3000時間動作させることが可能となる。この切り替えるときの電圧を切替電圧という。
【0073】
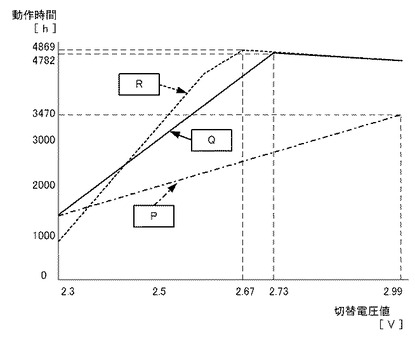
図9は、実施の形態2に係るセンサノードの動作時間の一例を示す図である。図10は、図9に係るセンサノードの動作時間の一例を示す図である。図9と図10のグラフ中のP,Q,Rは対応する。ここでのセンサノードに搭載する電池は、電池特性情報IDがB2の電池の場合である。また、図9および図10では、1時間に1回、動作させることを想定している。したがって、動作時間は動作回数を表している。ここでは、動作していない間の自然放電は無視できるものとする。
【0074】
図9を見ると、センサノードを4869時間動作させるためには、切替電圧値を2.67Vに設定するとよいことが分かる。なお、図9のP,Q,Rで示す処理は、切替電圧値を2.3Vから3Vの間で遷移させた場合に最も動作時間の長かった値を動作時間として表記している。
【0075】
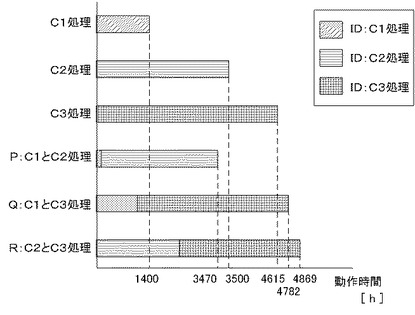
図10を見ると、Rで示された作動シーケンスに関する情報の作動シーケンスIDがC2である処理を行ったのち、作動シーケンスに関する情報の作動シーケンスIDがC3である処理を行うことで、センサノードは4869時間動作する。
【0076】
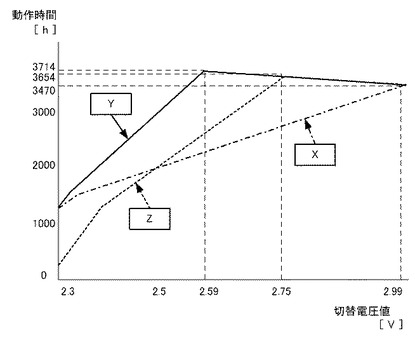
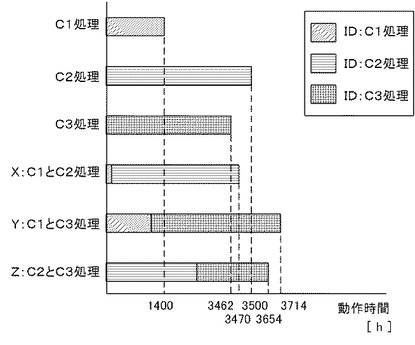
図11は、実施の形態2に係るセンサノードの動作時間のその他の例を示す図である。図12は、図11に係るセンサノードの動作時間の一例を示す図である。図11および図12では、図9および図10と同様に、1時間に1回、動作させることを想定している。したがって、動作時間は動作回数を表している。ここでは、動作していない間の自然放電は無視できるものとする。
【0077】
図11と図12のグラフ中のX,Y,Zは対応する。図9および図10の場合と図11および図12におけるセンサノードの動作は同じであり、ここでのセンサノードに搭載する電池は、電池特性情報IDがB3の電池の場合である。
【0078】
図11を見ると、センサノードを3714時間動作させるためには、切替電圧値を2.59Vに設定するとよいことが分かる。なお、図12中のX,Y,Zで示す処理は、切替電圧値を2.3Vから3Vの間で遷移させた場合に最も動作時間の長かった値を動作時間として表記している。
【0079】
図12を見ると、Yで示された作動シーケンスに関する情報の作動シーケンスIDがC1である処理を行ったのち、作動シーケンスに関する情報の作動シーケンスIDがC3である処理を行うことで、センサノードは3714時間動作する。
【0080】
以下に、図4および図5、図7ないし図10を参照して、センサノードの動作を説明する。センサノードに搭載された電池は、電池特性情報IDがB2の電池とする。
【0081】
センサノード1はセンサ計測処理を開始すると、ノード制御部103はセンサノード1を待機状態から動作状態へ復帰させる。次に、ノード制御部103は、情報格納部105を参照し、電池特性情報とセンサノード1のセンサノード特性情報の作動シーケンスに関する情報を取得する。
【0082】
ノード制御部103は、情報格納部105より作動シーケンスに関する情報を取得すると、電池計測部104へ指示を行い、電池計測部104は、センサノード1の電池電圧の計測を行う。またノード制御部103は算出部109へ指示を行い、算出部109は長時間動作可能な作動シーケンスを算出し、組み合わせにより長時間動作可能となる作動シーケンスの組み合わせと切替電圧値を作動シーケンスに関する情報としてノード制御部103へ伝送する。
【0083】
具体的には、算出部109は、電池特性情報から、実行可能な作動シーケンスに関する情報を取得する。電池特性情報IDがB2の電池の許容最大負荷は600mAである。作動シーケンスに関する情報に記載の処理の瞬間最大消費電流は、搭載する電池の許容最大負荷以下であるので、作動シーケンスに関する情報に記載の処理の作動シーケンスIDがC1,C2,C3である処理は、センサノード1において実行可能な処理であることがわかる。
【0084】
次に、算出部109は、実行可能な作動シーケンスに関する情報を元に各作動シーケンスを実行した際の動作時間を計算する。動作時間は次式より与えられる。
動作時間=Min(公称容量/放電量,(公称電圧−動作終了電圧)/降下電圧)
ここで、Min(A,B)とは、AとBの値を比較し、A<BであればAを、A≧BであればBを出力する関数である。また、降下電圧は、実施の形態1に記載した方法で算出する。
【0085】
センサノード1において、作動シーケンスに関する情報の作動シーケンスIDがC1である処理を行うと、降下電圧は、電池特性情報の回復電圧係数と作動シーケンスに関する情報の降下電圧基数から0.0005と計算できる。センサノード1の動作時間は、作動シーケンスに関する情報の作動シーケンスIDがC1である処理を繰り返すと、
Min(2400/0.36,(3−2.3)/0.0005)=Min(6666.6,1400)=1400
となり、1400時間動作することが分かる。
【0086】
作動シーケンスに関する情報の作動シーケンスIDがC1である処理と作動シーケンスIDがC2である処理を組み合わせたときは、最初に行う処理を切替電圧値以下になるまで実行後、次に指示された処理を行うものとして計算を行う。
【0087】
また、切替電圧値は、電池特性情報の公称電圧と動作終了電圧値の範囲においてセンサノード1に搭載した電池が取りうる値を用いて計算を行う。電池の公称電圧は3Vであり、動作終了電圧は作動シーケンスに関する情報によると2.3Vであることが分かるので、動作可能最低電圧は、2.3Vから3Vの間の値を取る。
【0088】
作動シーケンスに関する情報の作動シーケンスIDがC1である処理と作動シーケンスIDがC2である処理を組み合わせたときの動作時間は、切替電圧値を2.5Vと設定した場合、先に作動シーケンスIDがC1である作動シーケンスが、切替電圧値である2.5Vになるまでの動作時間Aと、動作可能最低電圧が2.5V以下になった後、作動シーケンスIDがC2である作動シーケンスを動作させ、バッテリに残った容量が0になる、もしくは出力電圧が動作終了電圧になるまでの動作時間Bを足し合わせた時間となる。
【0089】
動作時間Aは、
Min(2400/0.36,(3−2.5)/0.0005)=Min(6666.6,1000)=1000
となり、1000時間と計算できる。このとき、バッテリの残容量は、作動シーケンスIDがC1である作動シーケンスを1000時間動作させた時の容量、つまり、
2400−0.36×1000=2040
となる。また、動作時間Bは、
Min(2040/0.44,(2.5−2.3)/0.0002)=Min(4636.3,1000)=1000
となり、1000時間と計算できる。従って、作動シーケンスに関する情報の作動シーケンスIDがC1である処理と作動シーケンスIDがC2である処理を組み合わせた時の動作時間はA+B=2000時間動作することが分かる。
【0090】
ノード制御部103は、算出部109より作動シーケンスの組み合わせ情報と動作可能最低電圧値を受け取ると、選択された作動シーケンスに所望の動作処理、ここではセンサ計測処理が含まれているかを確認する。選択部106は、選択された作動シーケンスに所望の動作処理であるセンサ計測処理が含まれていない場合、作動シーケンスの組み合わせ情報より、最初に実行する作動シーケンスの、次の動作処理を選択する。
【0091】
選択部106は、所望の動作処理、ここではセンサ計測処理が含まれている作動シーケンスが選択されていた場合、計測電圧値と切替電圧値とを比較し、計測電圧値が切替電圧値以上の値であるならば、作動シーケンスを切り替えない。計測電圧値が切替電圧値より低い値であるならば、作動シーケンスの組み合わせ情報より、次に実行する作動シーケンスを選択する。
【0092】
選択部106が作動シーケンスを選択し、ノード制御部103は、その作動シーケンスに従い計測部107へセンサ計測要求を送る。データ生成部108は、計測結果を送信できるデータの形に生成して送信データとし、通信制御部102の指示により送受信部101から基地局2へ向けて送信する。通信制御部102は、送信が完了した事をノード制御部103へ通知してもよい。
【0093】
ノード制御部103は、センサノード1で計測したデータを基地局2へ送信した後、センサノード1の放電量を低減するとともに、センサノード1に搭載した電池の電圧を回復させるため、所定の時間、センサノード1を待機状態にするように指示し、センサノード1は動作状態から待機状態へ遷移する。所定時間が経過すると、センサノード1は待機状態から動作状態へ復帰し、上述の処理を行う。そして、この一連の流れの処理を、搭載する電池残量がなくなるまで繰り返す。
【0094】
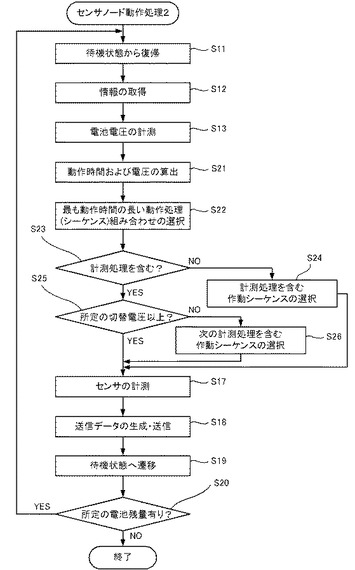
図13は、実施の形態2に係る無線センサシステムの、センサノードの動作処理の一例を示すフローチャートである。基本的な動作処理は、実施の形態1に係る無線センサシステムの、センサノード1の動作処理と同じである。電池電圧の計測(ステップS13)の後からセンサの計測(ステップS17)の前まで間に、以下のステップS21ないしステップS26を挿入する。電池電圧の計測(ステップS13)まで、およびセンサの計測(ステップS17)以降は、実施の形態1に係る無線センサシステムの、センサノード1の動作処理と同じである。
【0095】
ノード制御部103の指示で、電池計測部104はセンサノード1の電池の電圧を計測する(ステップS13)。続いて、算出部109は、センサノード1の動作時間と、ステップS12で取得した情報を基に、動作時間および電圧の算出を行い(ステップS21)、作動シーケンスの組み合わせ情報と動作可能最低電圧値をノード制御部103へ伝送する。ノード制御部103より情報を受けて、選択部106は、最も動作時間の長い作動シーケンスの組み合わせの選択を行う(ステップS22)。
【0096】
選択した作動シーケンスに所望の動作処理、ここではセンサ計測処理が含まれていなければ(ステップS23;NO)、選択部106は、計測処理を含む作動シーケンスを選択し(ステップS24)、ステップS17へ進む。選択した作動シーケンスに計測処理が含まれていれば(ステップS23;YES)、そのままステップS25へ進む。
【0097】
選択した作動シーケンスの動作電圧が、所定の切替電圧以上でなければ(ステップS25;NO)、選択部106は、次の計測処理を含む作動シーケンスを選択し(ステップS26)、ステップS17へ進む。選択した作動シーケンスの動作電圧が、所定の切替電圧以上であれば(ステップS25;YES)、そのままステップS17へ進む。
【0098】
ステップS22ないしステップS26において、選択部106で実行する作動シーケンスの選択を終えると、ノード制御部103へ選択した作動シーケンス伝送する。そして、ノード制御部103は、計測部107に指示を行い、選択された作動シーケンスに従って計測部107はセンサの計測を行う(ステップS17)。
【0099】
以上説明したように、本実施の形態2の無線センサシステムによれば、電池残量と供給電圧の関係を考慮した制御が可能となり、結果としてセンサノードの動作時間を延長させることができる。
【0100】
バッテリの特性を考慮した動作手順を繰り返し、バッテリの供給電圧が電子機器の駆動電圧より低くなる可能性がある時に、待機状態におけるバッテリの電圧回復特性を考慮した処理に切り替えることで、バッテリを最大限に活用でき、長時間センサノードが動作することを可能とする。
【0101】
また、センサノードに搭載するバッテリの種別によって、単純に最初は最も放電量の少ない作動シーケンスを選択し、後に電圧降下の影響が少ない作動シーケンスに切り替える処理は行わずに、最もセンサノードの動作時間が長くなる作動シーケンスを実行することが可能となる。結果として、センサノードの動作時間がより長くなる作動シーケンスを実行することが可能となる。
【0102】
実施の形態1および実施の形態2において、電池駆動装置を、無線センサシステムのセンサノードを例に挙げて説明したが、電池駆動装置は上述した例に限られない。また、無線センサシステムはセンサノードと基地局を備え、センサノードと基地局間で送受信を行う構成としたが、必ずしも基地局を備えるとは限らず、また送受信を行うとも限らず、任意に設定可能である。例えば、センサノードは、所定の時間間隔でセンサで計測しつづけた記録を、センサノードに備えたメモリなどの記録装置に記憶し続け、センサノードを回収することで、センサの計測記録を取得できるようにしてもよい。
【0103】
実施の形態1および実施の形態2において、電池駆動装置を無線センサシステムのセンサノードとし、作動シーケンスにより行われる動作処理をセンサでの計測として説明している。例えば、センサでの計測を行う際のセンサは、環境測定のセンサであって、温度、湿度、明るさのそれぞれについて測定センサを備え、動作処理の組み合わせにより作動シーケンスが与えられる。作動シーケンスは、温度のみ、湿度のみ、明るさのみ、温度と湿度、温度と明るさ、湿度と明るさ、温度と湿度と明るさ、の合計7種類の作動シーケンスが設定される。
【0104】
また、上述の例に限らずに、電池駆動装置に複数のデバイスを備えてもよい。例えば、デバイスは、センサ、時刻計測、データ送信のそれぞれの機能部として備えておき、動作処理を行う機能部の組み合わせにより作動シーケンスが与えられる。さらに、センサをセンサごとの動作処理に分けて、動作処理の組み合わせにより作動シーケンスを与えることも可能である。電池で駆動する複数のデバイスのうち、少なくとも2つのデバイスを同時に実行する作動シーケンスと、異なる時間に実行する作動シーケンスを選択できる構成で、それらの作動シーケンスで放電量と降下電圧が異なる場合に、本発明を適用することができる。
【0105】
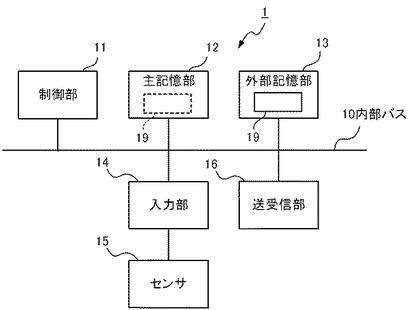
図14は、図1または図7に示すセンサノードのハードウエア構成の一例を示すブロック図である。センサノード1は、図14に示すように、制御部11、主記憶部12、外部記憶部13、入力部14、センサ15および送受信部16を備える。主記憶部12、外部記憶部13、入力部14および送受信部16はいずれも内部バス10を介して制御部11に接続されている。
【0106】
制御部11はCPU(Central Processing Unit)またはディジタル信号処理装置(DSP:Digital Signal Processor)等から構成され、外部記憶部13に記憶されている制御プログラム19に従って、センサノード1の送受信部101、通信制御部102、ノード制御部103、電池計測部104、情報格納部105、選択部106、計測部107、データ生成部108および算出部109の各処理を実行する。制御部11はまた、FPGA(Field Programmable Gate Array)で構成することもできる。
【0107】
主記憶部12はRAM(Random-Access Memory)等から構成され、制御部11の作業領域として用いられる。
【0108】
外部記憶部13は、ROM(Read-Only Memory)、フラッシュメモリ、ハードディスク等の不揮発性メモリから構成され、センサノード1の処理を制御部11に行わせるための制御プログラム19を予め記憶し、また、制御部11の指示に従って、制御プログラム19が記憶するデータを制御部11に供給し、制御部11から供給されたデータを記憶する。
【0109】
入力部14は、シリアルインタフェースまたはパラレルインタフェースから構成されている。入力部14は、センサ15に接続し、センサ15から各検出データを入力する。
【0110】
送受信部16は、無線送受信機およびそれらと接続するシリアルインタフェースまたはLAN(Local Area Network)インタフェースから構成されている。制御部11は、送受信部16を介して、基地局2に生成データを送信し、予測データを基地局2から受信する。
【0111】
図1または図7に示すセンサノード1の送受信部101、通信制御部102、ノード制御部103、電池計測部104、情報格納部105、選択部106、計測部107、データ生成部108および算出部109の処理は、制御プログラム19が、制御部11、主記憶部12、外部記憶部13、入力部14および送受信部16などを資源として用いて処理することによって実行する。
【0112】
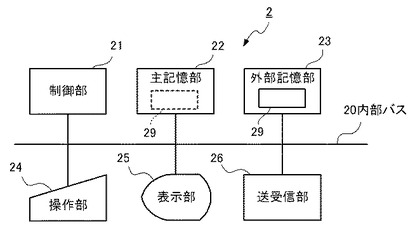
図15は、本発明の実施の形態に係る基地局2の物理的な構成例を示すブロック図である。基地局2は、図15に示すように、制御部21、主記憶部22、外部記憶部23、操作部24、表示部25および送受信部26を備える。主記憶部22、外部記憶部23、操作部24、表示部25および送受信部26はいずれも内部バス20を介して制御部21に接続されている。
【0113】
制御部21はCPU(Central Processing Unit)等から構成され、外部記憶部23に記憶されている通信プログラム29に従って、前述の通信処理を実行する。
【0114】
主記憶部22はRAM(Random-Access Memory)等から構成され、外部記憶部23に記憶されている通信プログラム29をロードし、制御部21の作業領域として用いられる。
【0115】
外部記憶部23は、フラッシュメモリ、ハードディスク、DVD−RAM(Digital Versatile Disc Random-Access Memory)、DVD−RW(Digital Versatile Disc ReWritable)等の不揮発性メモリから構成され、前記の処理を制御部21に行わせるための通信プログラム29を予め記憶し、また、制御部21の指示に従って、この通信プログラム29が記憶するデータを制御部21に供給し、制御部21から供給されたデータを記憶する。
【0116】
操作部24はキーボードおよびマウスなどのポインティングデバイス等と、キーボードおよびポインティングデバイス等を内部バスに接続するインタフェース装置から構成されている。操作部24を介して、センサノード1の識別番号などが入力され、制御部21に供給される。
【0117】
表示部25は、CRT(Cathode Ray Tube)またはLCD(Liquid Crystal Display)などから構成され、センサノード1から受信したデータなどを表示する。
【0118】
送受信部26は、無線送受信機およびそれらと接続するシリアルインタフェースまたはLAN(Local Area Network)インタフェースから構成されている。送受信部26を介して、センサノード1に予測データを送信し、生成データをセンサノード1から受信する。
【0119】
図1または図7に示す基地局2の送受信部201、通信制御部202および受信データ格納部203の処理は、通信プログラム29が、制御部21、主記憶部22、外部記憶部23、操作部24、表示部25および送受信部26などを資源として用いて処理することによって実行する。
【0120】
その他、前記のハードウエア構成やフローチャートは一例であり、任意に変更および修正が可能である。
【0121】
センサノード1の主記憶部12、外部記憶部13、入力部14および送受信部16、および基地局2の制御部21、主記憶部22、外部記憶部23、操作部24、表示部25および送受信部26などから構成される無線センサシステムの処理を行う中心となる部分は、専用のシステムによらず、通常のコンピュータシステムを用いて実現可能である。たとえば、前記の動作を実行するためのコンピュータプログラムを、コンピュータが読み取り可能な記録媒体(フレキシブルディスク、CD−ROM、DVD−ROM等)に格納して配布し、当該コンピュータプログラムをコンピュータにインストールすることにより、前記の処理を実行するセンサノード1または基地局2を構成してもよい。また、インターネット等の通信ネットワーク上のサーバ装置が有する記憶装置に当該コンピュータプログラムを格納しておき、通常のコンピュータシステムがダウンロード等することでセンサノード1または基地局2を構成してもよい。
【0122】
また、センサノード1または基地局2の機能を、OS(オペレーティングシステム)とアプリケーションプログラムの分担、またはOSとアプリケーションプログラムとの協働により実現する場合などには、アプリケーションプログラム部分のみを記録媒体や記憶装置に格納してもよい。
【0123】
また、搬送波にコンピュータプログラムを重畳し、通信ネットワークを介して配信することも可能である。たとえば、通信ネットワーク上の掲示板(BBS, Bulletin Board System)に前記コンピュータプログラムを掲示し、ネットワークを介して前記コンピュータプログラムを配信してもよい。そして、このコンピュータプログラムを起動し、OSの制御下で、他のアプリケーションプログラムと同様に実行することにより、前記の処理を実行できるように構成してもよい。
【0124】
上記の実施形態の一部または全部は、以下の付記のようにも記載されうるが、以下には限られない。
【0125】
(付記1)同時に作動可能な2以上のデバイスを含む複数のデバイスと、
前記複数のデバイスを駆動する電力を給電する電池と、
前記複数のデバイスを駆動する1回の動作で、前記複数のデバイスのうち2以上のデバイスを同時に作動させるシーケンスと、当該2以上のデバイスのうち少なくとも1つを異なる時間に作動させるシーケンスと、を含む2以上の作動シーケンスから1つの作動シーケンスを選択する選択手段と、
前記電池の公称電圧と動作可能最低電圧の間の所定の切替電圧の情報を記憶する手段と、
前記作動シーケンスごとの、1回の動作の放電量および電圧低下量の情報を取得する情報取得手段と、
前記電池の電圧を計測する計測手段と、
前記選択手段で選択した作動シーケンスに従って、前記複数のデバイスを駆動する手段と、
を備え、
前記選択手段は、前記電池の電圧が前記切替電圧以上の場合に、前記放電量が最小の作動シーケンスを選択し、前記電池の電圧が前記切替電圧未満の場合に、前記電圧低下量が最小の作動シーケンスを選択する、
ことを特徴とする電池駆動装置。
【0126】
(付記2)前記作動シーケンスごとの動作回数と該作動シーケンスの放電量の積の和が、前記電池の公称容量を超えない範囲で、前記電池の公称電圧と、前記公称電圧以下で前記動作可能最低電圧以上の基準電圧との差を前記最小放電量の作動シーケンスの電圧低下量で除した値と、前記基準電圧と前記動作可能最低電圧との差を前記最小の電圧低下量で除した値と、の合計が最大になる基準電圧を、前記切替電圧として設定する手段を備えることを特徴とする付記1に記載の電池駆動装置。
【0127】
(付記3)前記作動シーケンスごとの、単位回復電圧における降下電圧を表す降下電圧基数と、前記電池の回復電圧係数を記憶する手段を備え、
前記情報取得手段は、前記降下電圧基数と前記回復電圧係数とから前記電圧低下量を算出する、
ことを特徴とする付記1または2に記載の電池駆動装置。
【0128】
(付記4)前記複数のデバイスはそれぞれ、前記電池駆動装置の周囲の状態を検出するセンサを含み、
前記1回の動作ごとに前記複数のデバイスを駆動した結果の情報を無線で通信する手段を備える、
ことを特徴とする付記1ないし3のいずれかに記載の電池駆動装置。
【0129】
(付記5)同時に作動可能な2以上のデバイスを含む複数のデバイスを、電池で駆動する電池駆動装置が行う電池駆動方法であって、
前記複数のデバイスを駆動する1回の動作で、前記複数のデバイスのうち2以上のデバイスを同時に作動させるシーケンスと、当該2以上のデバイスのうち少なくとも1つを異なる時間に作動させるシーケンスと、を含む2以上の作動シーケンスから1つの作動シーケンスを選択する選択ステップと、
前記電池の公称電圧と動作可能最低電圧の間の所定の切替電圧の情報を取得するステップと、
前記作動シーケンスごとの、1回の動作の放電量および電圧低下量の情報を取得する情報取得ステップと、
前記電池の電圧を計測する計測ステップと、
前記選択ステップで選択した作動シーケンスに従って、前記複数のデバイスを駆動するステップと、
を備え、
前記選択ステップは、前記電池の電圧が前記切替電圧以上の場合に、前記放電量が最小の作動シーケンスを選択し、前記電池の電圧が前記切替電圧未満の場合に、前記電圧低下量が最小の作動シーケンスを選択する、
ことを特徴とする電池駆動方法。
【0130】
(付記6)前記作動シーケンスごとの動作回数と該作動シーケンスの放電量の積の和が、前記電池の公称容量を超えない範囲で、前記電池の公称電圧と、前記公称電圧以下で前記動作可能最低電圧以上の基準電圧との差を前記最小放電量の作動シーケンスの電圧低下量で除した値と、前記基準電圧と前記動作可能最低電圧との差を前記最小の電圧低下量で除した値と、の合計が最大になる基準電圧を、前記切替電圧として設定するステップを備えることを特徴とする付記5に記載の電池駆動方法。
【0131】
(付記7)前記情報取得ステップは、単位回復電圧における降下電圧を表す降下電圧基数と前記電池の回復電圧係数とから前記電圧低下量を算出する、ことを特徴とする付記5または6に記載の電池駆動方法。
【0132】
(付記8)前記複数のデバイスはそれぞれ、前記電池駆動装置の周囲の状態を検出するセンサを含み、
前記1回の動作ごとに前記複数のデバイスを駆動した結果の情報を無線で通信するステップを備える、
ことを特徴とする付記5ないし7のいずれかに記載の電池駆動方法。
【0133】
(付記9)コンピュータに、
電池の公称電圧と動作可能最低電圧の間の所定の切替電圧の情報を取得するステップと、
複数のデバイスを駆動する1回の動作で、前記複数のデバイスのうち2以上のデバイスを同時に作動させるシーケンスと、当該2以上のデバイスのうち少なくとも1つを異なる時間に作動させるシーケンスと、を含む2以上の作動シーケンスごとの、1回の動作の放電量および電圧低下量の情報を取得する情報取得ステップと、
前記電池の電圧を計測する計測ステップと、
前記電池の電圧が前記切替電圧以上の場合に、前記放電量が最小の作動シーケンスを選択し、前記電池の電圧が前記切替電圧未満の場合に、前記電圧低下量が最小の作動シーケンスを選択する選択ステップと、
前記選択ステップで選択した作動シーケンスに従って、前記複数のデバイスを駆動するステップと、
を実行させることを特徴とするプログラム。
【産業上の利用可能性】
【0134】
本発明は、無線センサシステムにおける各センサノードの電池残量を考慮することで、放電量の低減および長寿命化を実現することが可能であり、また、無線通信システム、特に、各無線ノードにおける省電力化が重要な電子タグシステムやセンサネットワークシステムなどに適用可能である。
【0135】
また、本発明の電池駆動装置は、無線通信を行う無線センサシステムのセンサノードに限らずに、乾電池やボタン型電池などで駆動する電池駆動装置に適用可能である。電池駆動であれば、その形態や用途を問わず、さまざまな電池駆動装置に適用可能である。
【符号の説明】
【0136】
1 センサノード
2 基地局
11 制御部
12 主記憶部
13 外部記憶部
14 入力部
15 センサ
16 送受信部
19 制御プログラム
21 制御部
22 主記憶部
23 外部記憶部
24 操作部
25 表示部
26 送受信部
29 通信プログラム
101 送受信部
102 通信制御部
103 ノード制御部
104 電池計測部
105 情報格納部
106 選択部
107 計測部
108 データ生成部
109 算出部
201 送受信部
202 通信制御部
203 受信データ格納部
【技術分野】
【0001】
本発明は、電池駆動装置、電池駆動方法およびプログラムに関する。
【背景技術】
【0002】
一般的に、無線センサネットワークの構成要素であるセンサノードは、乾電池やボタン電池を電力供給源として作動し、ひとたび設置されると、センサノード周囲のデータ、例えば温度や湿度データを基地局へ一定周期で送信するといった動作を繰り返す。センサノードの電池が切れた場合の充電作業や、電池の交換作業等の手間を省くため、センサノードは数ヶ月ないし数年間、ときにはそれ以上動作することが望まれる。
【0003】
そのため、センサノードは自身の放電量を抑え、電池の消耗を減らすことが必要となる。すなわち、センサノードの省電力化を図り低電力で動作させることにより、センサノードを長期間に渡って動作させることが必要となる。
【0004】
特許文献1では、電源であるバッテリの電力残量に応じて通信機能を選択・限定する省電力制御方式に関する携帯無線電話装置が記載されている。携帯無線電話装置のバッテリ電源の消耗を軽減し、省電力化を図るために、バッテリ電源の電力の残量に対応して、あるいは、その出力電圧レベルに応じて、通信機能を選択・限定し、バッテリ残量が多い場合は通常の通信機能を実行し、また間欠受信周期は通常の時間間隔とし、バッテリ残量が中位の場合は着呼処理のみの通信機能とし、また間欠受信周期は通常の時間間隔より少し長い中位の時間間隔とし、バッテリ残量が少ない場合は着信記録のみの通信機能とし、間欠受信周期は通常の時間間隔よりも長くする方法である。
【0005】
特許文献2では、バッテリの出力電圧がある値より低下すると短時間のうちに動作不能な電圧まで低下する事を改善するバッテリ駆動可能な情報処理装置が記載されている。その方法は、バッテリの出力電圧を常時監視する電圧監視回路に監視電圧値を設定し、バッテリ出力電圧が設定値より低下した場合に、電圧監視回路からの情報によりCPUに供給するクロック周波数を落とすか、CPUに対してウエイト信号を供給することによりCPUの消費電力を抑えて、システムの駆動時間を長くする方法である。
【0006】
特許文献3では、電子情報機器の消費電力をより少なくできるプロセッサが記載されている。その技術は、クロック発振器に周波数制御信号を発し、その周波数制御信号に応じた周波数で動作するとともに、電源回路に電圧要求信号を発し、その電圧要求信号に応じた電圧で動作するプロセッサにおいて、クロック周波数と、電源電圧と、電源が有する電源効率(η)とによって規定される、単位データ処理について消費エネルギーが最小となる動作領域においてプロセッサ自身が動作するように、供給されるクロック周波数及び電源電圧を制御する技術である。
【0007】
特許文献4では、電子装置または通信装置の消費電力を低減する制御装置が記載されている。その方法は、制御装置は、通信装置と、該通信装置を用いて通信を行う電子装置と、を制御する制御装置であって、前記電子装置及び前記通信装置の動作状態と前記制御装置への要求を含む情報とに基づいて、前記電子装置及び前記通信装置の制御を行う複数の制御プロファイル中から前記電子装置と前記通信装置との少なくとも一方の消費電力を略最小にする動作を規定する制御プロファイルを選択するプロファイル選択部を備える方法である。
【0008】
特許文献5では、一般的な省電力の概念を超え、電池をより長時間使用可能な電池駆動無線通信型検出器端末が記載されている。その技術は、内蔵の電池により作動し外部の物理量の情報を取得する複数の検出器を有し監視装置と無線通信によりデータの授受を行う無線通信型検出器端末において、前記電池から前記検出器への通電制御を行う検出器制御CPU及び前記検出器制御CPUへの通電制御を行う電源制御CPUを設けたものであり、検出器の電源を検出器制御CPUでオン・オフでき、検出器を使用しないときに電源を切断することにより、電力消費を押える方法である。
【先行技術文献】
【特許文献】
【0009】
【特許文献1】特開平10−209953号公報
【特許文献2】特開2001−5572号公報
【特許文献3】特開2004−303206号公報
【特許文献4】特開2006−48630号公報
【特許文献5】特開2007−235839号公報
【発明の概要】
【発明が解決しようとする課題】
【0010】
関連する技術では、消費電力の低減により装置の長時間作動を可能としていた。しかし、電圧降下の影響や、行う動作処理の種類により、電池の残量がある場合であっても装置が作動できなくなるなどの不具合が生じていた。
【0011】
本発明は、上述の事情に鑑みてなされたもので、電池残量と供給電圧の関係を考慮した制御によりデバイスの動作時間を延長させることができる電池駆動装置、電池駆動方法およびプログラムを提供することを目的とする。
【課題を解決するための手段】
【0012】
本発明の第1の観点に係る電池駆動装置は、
同時に作動可能な2以上のデバイスを含む複数のデバイスと、
前記複数のデバイスを駆動する電力を給電する電池と、
前記複数のデバイスを駆動する1回の動作で、前記複数のデバイスのうち2以上のデバイスを同時に作動させるシーケンスと、当該2以上のデバイスのうち少なくとも1つを異なる時間に作動させるシーケンスと、を含む2以上の作動シーケンスから1つの作動シーケンスを選択する選択手段と、
前記電池の公称電圧と動作可能最低電圧の間の所定の切替電圧の情報を記憶する手段と、
前記作動シーケンスごとの、1回の動作の放電量および電圧低下量の情報を取得する情報取得手段と、
前記電池の電圧を計測する計測手段と、
前記選択手段で選択した作動シーケンスに従って、前記複数のデバイスを駆動する手段と、
を備え、
前記選択手段は、前記電池の電圧が前記切替電圧以上の場合に、前記放電量が最小の作動シーケンスを選択し、前記電池の電圧が前記切替電圧未満の場合に、前記電圧低下量が最小の作動シーケンスを選択する、
ことを特徴とする。
【0013】
本発明の第2の観点に係る電池駆動方法は、
同時に作動可能な2以上のデバイスを含む複数のデバイスを、電池で駆動する電池駆動装置が行う電池駆動方法であって、
前記複数のデバイスを駆動する1回の動作で、前記複数のデバイスのうち2以上のデバイスを同時に作動させるシーケンスと、当該2以上のデバイスのうち少なくとも1つを異なる時間に作動させるシーケンスと、を含む2以上の作動シーケンスから1つの作動シーケンスを選択する選択ステップと、
前記電池の公称電圧と動作可能最低電圧の間の所定の切替電圧の情報を取得するステップと、
前記作動シーケンスごとの、1回の動作の放電量および電圧低下量の情報を取得する情報取得ステップと、
前記電池の電圧を計測する計測ステップと、
前記選択ステップで選択した作動シーケンスに従って、前記複数のデバイスを駆動するステップと、
を備え、
前記選択ステップは、前記電池の電圧が前記切替電圧以上の場合に、前記放電量が最小の作動シーケンスを選択し、前記電池の電圧が前記切替電圧未満の場合に、前記電圧低下量が最小の作動シーケンスを選択する、
ことを特徴とする。
【0014】
本発明の第3の観点に係るプログラムは、
コンピュータに、
電池の公称電圧と動作可能最低電圧の間の所定の切替電圧の情報を取得するステップと、
複数のデバイスを駆動する1回の動作で、前記複数のデバイスのうち2以上のデバイスを同時に作動させるシーケンスと、当該2以上のデバイスのうち少なくとも1つを異なる時間に作動させるシーケンスと、を含む2以上の作動シーケンスごとの、1回の動作の放電量および電圧低下量の情報を取得する情報取得ステップと、
前記電池の電圧を計測する計測ステップと、
前記電池の電圧が前記切替電圧以上の場合に、前記放電量が最小の作動シーケンスを選択し、前記電池の電圧が前記切替電圧未満の場合に、前記電圧低下量が最小の作動シーケンスを選択する選択ステップと、
前記選択ステップで選択した作動シーケンスに従って、前記複数のデバイスを駆動するステップと、
を実行させることを特徴とする。
【発明の効果】
【0015】
本発明によれば、電池残量と供給電圧の関係を考慮した制御によりデバイスの動作時間を延長させることができる。
【図面の簡単な説明】
【0016】
【図1】本発明の実施の形態1に係る無線センサシステムの構成例を示すブロック図である。
【図2】乾電池やボタン型電池で駆動する無線通信を行う電池駆動装置の一例を示す構成概略図である。
【図3】図2に係る電池駆動装置の作動シーケンスの一例を示す図である。
【図4】電池特性情報の一例を示す図である。
【図5】センサノード特性情報の作動シーケンスに関する情報の一例を示す図である。
【図6】実施の形態1に係る無線センサシステムの、センサノードの動作処理の一例を示すフローチャートである。
【図7】本発明の実施の形態2に係る無線センサシステムの構成例を示すブロック図である。
【図8】センサノードの動作時間比較の一例を示す図である。
【図9】実施の形態2に係るセンサノードの動作時間の一例を示す図である。
【図10】図9に係るセンサノードの動作時間の一例を示す図である。
【図11】実施の形態2に係るセンサノードの動作時間のその他の例を示す図である。
【図12】図11に係るセンサノードの動作時間の一例を示す図である。
【図13】実施の形態2に係る無線センサシステムの、センサノードの動作処理の一例を示すフローチャートである。
【図14】本発明の実施の形態に係る無線センサシステムの、センサノードの物理的な構成例を示すブロック図である。
【図15】本発明の実施の形態に係る無線センサシステムの、基地局の物理的な構成例を示すブロック図である。
【発明を実施するための形態】
【0017】
以下、本発明の実施の形態について図面を参照しながら詳細に説明する。なお、図中同一または相当部分には同一符号を付す。
【0018】
本発明において、作動シーケンスとは、複数のデバイスを作動させるシーケンスをいい、作動シーケンスを実行することにより、その動作は処理される。特に、デバイスがセンサであって、センサを作動し計測を行う場合において、その作動シーケンスを計測シーケンスという。
【0019】
また、複数のデバイスのうち、少なくとも2つは同時に作動させることができる。また、同時に作動させることができるデバイスのうち、少なくとも1つは、異なる時間に作動させることができる。本発明の電池駆動装置は、これらのシーケンスを含む2つ以上の作動シーケンスから1つを選択して実行可能である。
【0020】
(実施の形態1)
図1は、本発明の実施の形態1に係る無線センサシステムの構成例を示すブロック図である。本発明の実施の形態において、電池駆動装置は無線センサシステムのセンサノードを例に挙げて説明する。また、電池駆動装置、ここではセンサノードをさす、に備える複数のデバイスのいずれかに、計測を行うセンサを含むものとする。
【0021】
無線センサシステムは、センサノード1と基地局2から構成される。センサノード1と基地局2は、無線で通信する。1つの基地局2と複数のセンサノード1が通信する場合がある。
【0022】
センサノード1は、送受信部101、通信制御部102、ノード制御部103、電池計測部104、情報格納部105、選択部106、計測部107およびデータ生成部108を備える。
【0023】
センサノード1は、例えば、それが設置された場所の温度、湿度、照度、圧力、雰囲気ガス濃度または音響レベルなどを計測するセンサを備え計測部107で検出する。計測部107で検出したデータを基地局2に無線で送信する。以降、センサノード1が基地局2に送信するデータを生成データという。基地局2は、各センサノード1から受信した生成データを蓄積し、図示しないサーバに送信したり、生成データを表示したり、そこで生成データの分析を行ったりする。
【0024】
送受信部101は、基地局2の送受信部201と無線でデータを送受信する。また、送受信部101は、基地局2からデータを受信すると、通信制御部102へ送る。
【0025】
データ生成部108は決められたタイミングで、前述したようにセンサで計測し計測部107で検出したデータから基地局2に送信すべきデータ(生成データ)を生成する。データ生成部108は、生成データを通信制御部102に送る。
【0026】
通信制御部102は、生成データを基地局2に送受信部101から送信する。
【0027】
ノード制御部103は、センサノード1の制御を行う。制御には、センサノード1の動作状態と待機状態の切替を含む。待機状態から動作状態へ切り替わることを復帰という。また、動作状態から待機状態へ切り替わることを遷移という。
【0028】
電池計測部104は、ノード制御部103の制御により、センサノード1の電池量を計測する。電池量の計測は、電池の電圧の計測を含む。
【0029】
情報格納部105は、電池特性およびセンサノード特性を含む情報を格納する。また、その他必要な情報があれば格納する。電池特性は、切替電圧の情報を含み、センサノード特性は、センサノード1の作動シーケンスごとの、1回の動作の放電量および電圧低下量の情報を含む。
【0030】
選択部106は、電池計測部104で計測した電池の電圧と、情報格納部105に格納された情報とを基に、センサノード1に最適な作動シーケンスを選択し、ノード制御部103へ伝送する。
【0031】
より詳しくは、電池の電圧が切替電圧以上の場合に、放電量が最小の作動シーケンスを選択し、電池の電圧が切替電圧未満の場合に、電圧低下量が最小の作動シーケンスを選択する。そして選択部106は、選択した作動シーケンスをノード制御部103へ伝送する。
【0032】
センサノード1を起動した初期には、通信する無線チャネルが空いている(搬送波の受信レベルが限界以下に小さい)ときに生成データの送信を開始し、以降は、決められたタイミングで生成データの送信を行う。あるいは、最初に基地局2を探索して通信周期の同期を確立したのち、生成データの送信を行う。
【0033】
一方、基地局2は、送受信部201、通信制御部202および受信データ格納部203を備える。基地局2の送受信部201は、センサノード1の送受信部101と無線でデータを送受信する。送受信部201は、センサノード1から生成データを受信すると、通信制御部202へ送る。通信制御部202は、受信した生成データを受信データ格納部203に記憶させる。
【0034】
このようにして、受信データ格納部203には、センサノード1から受信した生成データがセンサノード1ごとに時系列に記憶される。記憶する生成データには、受信した時刻または受信する予定の時刻を付してもよい。
【0035】
図2は、乾電池やボタン型電池で駆動する無線通信を行う電池駆動装置の一例を示す構成概略図である。制御を行うCPU(Central Processing Unit)、電池、無線通信を行う無線通信IC(Integrated Circuit)および各処理A,B,Cに対応する外部装置を備える。各処理A,B,Cに対応する外部装置のいずれかもしくは複数に、計測を行うセンサ(図1におけるセンサノード1の計測部107に該当)を備えていてもよい。
【0036】
乾電池やボタン型電池には、連続最大放電量と連続標準負荷が規定されており、連続最大放電量とは、電池が連続して発生することのできる最大の電流量をいう。連続標準負荷とは、電池が想定された環境下において、標準的に発生することのできる電流量をいう。
【0037】
図3は、図2に係る電池駆動装置の作動シーケンスの一例を示す図である。異なった2つの作動シーケンスF,Gについて、図3(a)は作動シーケンスFの消費電流の変化を表し、図3(b)は作動シーケンスGの消費電流の変化を表す。作動シーケンスFでは、外部装置A,B,Cをそれぞれ順次処理した後に待機状態に遷移させ間欠動作を行う。作動シーケンスGでは、外部装置A,B,Cを同時に処理した後に待機状態に遷移させ間欠動作を行う。間欠動作の間は待機時間となり、連続標準負荷より小さい消費電流で済むため、一定の割合で低下した電源電圧を回復することができる。
【0038】
作動シーケンスFと作動シーケンスGを比較すると、作動シーケンスGの方が同時に処理を行うことでCPUの駆動する時間を短縮できるので放電量は少ない。しかし作動シーケンスGにおいて瞬間に消費する電流は大きく連続最大放電量を超えており、このとき電圧降下が発生する。電池駆動装置の電池の電圧が切替電圧未満となった場合において、作動シーケンスGではなく作動シーケンスFを選択することで、放電量は大きくなるが、連続最大放電量を抑えられ、電圧降下の発生を抑制できるので、電池の残量の電源電圧をより長時間使用することが可能となる。
【0039】
図4は、電池特性情報の一例を示す図である。電池特性情報とは、センサノードに接続された電池を通常の状態で使用した場合に得られる端子間の電圧の目安である公称電圧、一般的にその電池が持つ容量の目安である公称容量(放電容量)、電池が想定された環境下において標準的に発生することのできる電流量を示す連続標準負荷、電池が瞬間的に発生することのできる最大負荷を示す許容最大負荷、センサノード待機時の回復電圧係数の情報を指す。
【0040】
図5は、センサノード特性情報の作動シーケンスに関する情報の一例を示す図である。作動シーケンスに関する情報とは、センサノードの処理手順(作動シーケンス)、シーケンス実行中の放電量、シーケンス実行中の瞬間最大消費電流、シーケンス実行後に降下する電圧値を算出する基となる数値である降下電圧基数、シーケンスの開始から終了までにかかる時間を示す計測時間、シーケンス終了時から次のシーケンス開始時までの時間を示す待機時間、搭載する機器の標準的な動作電圧(動作可能最低電圧)と、搭載する機器が動作しなくなる電圧(動作終了電圧)の情報を指す。放電量は、シーケンス実行中の消費電流を計測時間で積分した値である。
【0041】
作動シーケンスIDがC1である作動シーケンスは、最も放電量が少ないシーケンスであるが、瞬間最大消費電流は最も高く、降下電圧基数も大きい。逆に、作動シーケンスIDがC3である作動シーケンスは最も放電量が多いシーケンスであるが、瞬間最大消費電流量は最も低く、降下電圧基数も低い。
【0042】
なお、降下電圧基数は、作動シーケンスの各処理を行った際に電池に発生する降下電圧を、以下の式にて計算できると定義した上で、実験的に求めた値である。
降下電圧=降下電圧基数×搭載電池の回復電圧係数
【0043】
図4および図5に示す電池特性情報およびセンサノード特性情報を含む情報は、センサノードの情報格納部105に格納して記憶される。
【0044】
図1ないし図5を用いて、センサノードの動作処理を説明する。動作処理は、センサを用いて計測を行う処理を含む。
【0045】
センサノード1はセンサ計測処理を開始すると、ノード制御部103はセンサノード1を待機状態から動作状態へ復帰させる。次に、ノード制御部103は、情報格納部105を参照し、電池特性情報とセンサノード1のセンサノード特性情報の作動シーケンスに関する情報を取得する。ここではセンサノード1は、図4の電池特性情報IDがB3の電池を搭載しているものとする。ノード制御部103は電池情報特性を蓄積しておき、次回以降の計測の際に、電池特性情報の取得を省略してもよい。同様に、ノード制御部103は作動シーケンスに関する情報を蓄積しておき、次回以降の計測の際に、作動シーケンスに関する情報の取得を省略してもよい。
【0046】
電池特性情報IDがB3の電池の場合、センサノード1で作動シーケンスIDがC1の処理を行う(図5参照)場合、作動シーケンスIDがC1の処理を一回処理すると、
0.000005(降下電圧基数)×100(回復電圧係数)=0.0005(降下電圧)
となり、0.0005V電源電圧が降下することが分かる。
【0047】
ノード制御部103は、情報格納部105より作動シーケンスに関する情報を取得すると、電池計測部104へセンサノード1の電池の電圧計測の指示を行う。選択部106は、電池計測部104が計測した電池の電圧と、作動シーケンスに関する情報の動作電圧と比較し、作動シーケンスの選択を行う。
【0048】
計測電圧が切替電圧以上の値であれば、選択部106は電池特性情報を元に、放電量が最小の作動シーケンスを選択する。すなわち選択部106は、最も低電力である作動シーケンスを選択する。
【0049】
作動シーケンスに関する情報に記載の処理の瞬間最大消費電流は、搭載する電池の許容最大負荷以下であるので、作動シーケンスに関する情報に記載の処理の作動シーケンスIDがC1,C2,C3である処理は、センサノード1において実行可能な処理であることがわかる。
【0050】
また、作動シーケンスに関する情報の放電量の項を見ると、作動シーケンスIDがC2,C3である処理に比べ、作動シーケンスIDがC1である処理の放電量は最も小さい値となっている。従って、作動シーケンスに関する情報の中で最も放電量の少ない作動シーケンスIDがC1である処理を選択する。
【0051】
センサノード1に搭載した電池の電池特性情報IDがB3である電池の例を示したが、IDがB4である電池の許容最大負荷は20mAであるため、作動シーケンスIDがC3である作動シーケンスのみ選択される。
【0052】
計測電圧が切替電圧未満の場合、選択部106は電池特性情報を元に、電圧低下量が最小の作動シーケンスを選択する。すなわち選択部106は、最も電圧降下が少ない作動シーケンスを選択する。
【0053】
作動シーケンスに関する情報の降下電圧基数の項を見ると、作動シーケンスIDがC1,C2である処理に比べ、作動シーケンスIDがC3である処理の降下電圧基数は最も小さい値となっている。作動シーケンスIDがC1,C2,C3である処理は、同じ電池、すなわち電池特性情報IDがB3である電池を用いて実行されるため、選択可能な処理のうち、作動シーケンスIDがC3である処理が最も降下電圧の少ない作動シーケンスである。従って、作動シーケンスに関する情報の中で最も電圧降下が少ない作動シーケンスIDがC3である処理を選択する。
【0054】
選択部106が作動シーケンスを選択し、ノード制御部103は、その作動シーケンスに従い計測部107へセンサ計測要求を送る。データ生成部108は、計測結果を送信できるデータの形に生成して送信データとし、通信制御部102の指示により送受信部101から基地局2へ向けて送信する。通信制御部102は、送信が完了した事をノード制御部103へ通知してもよい。
【0055】
ノード制御部103は、センサノード1で計測したデータを基地局2へ送信した後、センサノード1の放電量を低減するとともに、センサノード1に搭載した電池の電圧を回復させるため、所定の時間、センサノード1を待機状態にするように指示し、センサノード1は動作状態から待機状態へ遷移する。所定時間が経過すると、センサノード1は待機状態から動作状態へ復帰し、上述の処理を行う。そして、この一連の流れの処理を、搭載する電池残量がなくなるまで繰り返す。
【0056】
図6は、実施の形態1に係る無線センサシステムの、センサノードの動作処理の一例を示すフローチャートである。本発明に係る電池駆動装置はセンサノードを例に挙げており、電池駆動装置であるセンサノードで行う様々な処理の中で、所望の動作処理は、センサでの計測処理を指す。
【0057】
無線センサシステムの基地局2の動作処理については、通信制御部202は送受信部201を介してセンサノード1のデータ送信を待ち受けし、データを受信すると受信データ格納部203に格納するという動作を繰り返す。
【0058】
まず、ノード制御部103は、待機状態にあるセンサノード1を動作状態へ復帰させ(ステップS11)、ノード制御部103は、情報格納部105のデータ情報を取得する(ステップS12)。データ情報は、電池特性情報とセンサノード1のセンサノード特性情報の作動シーケンスに関する情報を含む。そして、電池計測部104はセンサノード1の電池の電圧を計測する(ステップS13)。
【0059】
計測した電池電圧が所定の切替電圧の値以上ならば(ステップS14;YES)、選択部106は放電量が最小の作動シーケンスを選択する(ステップS15)。また、このとき、計測した電池電圧が所定の切替電圧の値以上でなければ(ステップS14;NO)、選択部106は電圧低下量が最小の作動シーケンスを選択する(ステップS16)。
【0060】
ノード制御部103は、選択された作動シーケンスに沿って計測部107を制御し、計測部107はセンサの計測を行う(ステップS17)。センサの計測を終えると、データ生成部108は、計測部107のセンサの計測結果より送信できるデータの形に変換し送信データを生成し、送受信部101を介して通信制御部102により基地局2へ向けて生成データを送信する(ステップS18)。
【0061】
ノード制御部103は、通信制御部102によりデータ送信が終わると、センサノード1を動作状態から待機状態へ遷移させる(ステップS19)。そして、動作に可能な所定の電池量があれば(ステップS20;YES)、センサノード1を所定時間待機させた後にステップS11に戻り、センサノード動作処理1の処理を繰り返す。動作に可能な所定の電池量がなくなれば(ステップS20;NO)、センサノード1の処理を終了する。
【0062】
以上説明したように、本実施の形態1の無線センサシステムによれば、電池残量と供給電圧の関係を考慮した制御が可能となり、結果としてセンサノードの動作時間を延長させることができる。
【0063】
バッテリの特性を考慮した動作手順を繰り返し、バッテリの供給電圧が電子機器の駆動電圧より低くなる可能性がある時に、待機状態におけるバッテリの電圧回復特性を考慮した処理に切り替えることで、バッテリを最大限に活用でき、長時間センサノードが動作することを可能とする。
【0064】
(実施の形態2)
図7は、本発明の実施の形態2に係る無線センサシステムの構成例を示すブロック図である。図1の無線センサシステムと基本的な構成は同じであり、センサノード1に算出部109を追加して備える。
【0065】
算出部109は、計測電圧値と作動シーケンス情報と電池特性情報をもとに、動作回数を算出する。本発明に係る電池駆動装置において、電池駆動装置を1時間に1回動作させることを想定しており、動作回数をそのまま動作時間として用いる場合がある。
【0066】
詳しくは、算出部109は、作動シーケンスごとの動作回数とその作動シーケンスの放電量の積の和が、電池の公称容量を超えない範囲で、電池の公称電圧と、公称電圧以下で動作可能最低電圧以上の基準電圧との差を最小放電量の作動シーケンスの電圧低下量で除した値と、基準電圧と動作可能最低電圧との差を最小の電圧低下量で除した値と、の合計が最大になる基準電圧を、切替電圧として算出する。
【0067】
この関係は以下のように表せる。電池の公称電圧をVo、動作可能最低電圧をVe、電池の公称容量をDとする。作動シーケンスの最小の放電量をdi、その作動シーケンスの電圧低下量をfiとし、作動シーケンスの最小の電圧低下量をfa、その作動シーケンスの放電量をdaとする。一般に、di ≦ da、 fi ≧ faである。そうして、切替電圧をv(Vo≧v≧Ve)として、
di・(Vo − v)/fi + da・(v − Ve)/fa ≦ D
の範囲で、
(Vo − v)/fi + (v − Ve)/fa
が最大になるvを切替電圧として設定する。
【0068】
ここで、特殊な場合について考える。いま、
da・(Vo − Ve)/fa ≦ D
ならば、切替電圧v=Voとして、すべて最小の電圧低下量の作動シーケンスで動作させれば動作回数は最大になる。また、
da・(Vo − Ve)/fa > D
かつ、
di・(Vo − Ve)/fi > D
ならば、動作回数は、作動シーケンスの放電量だけで決まり、D/diが最大の動作回数になる。この場合は、v=Veと考えることができる。
【0069】
上述の特殊な場合の中間、すなわち、
da・(Vo − Ve)/fa > D
でかつ、
di・(Vo − Ve)/fi ≦ D
の場合には、Vo≧v≧Veなるvで、
di・(Vo − v)/fi + da・(v − Ve)/fa ≦ D
の範囲で、
(Vo − v)/fi + (v − Ve)/fa
が最大になるvが存在する。そのvを切替電圧として設定することができる。以下、具体的な例を用いて説明する。
【0070】
図8は、センサノード動作時間比較の一例を示す図である。図8(a)は本実施形態に係る電子機器の省電力方法、図8(b)従来の省電力方法の、放電量削減を示す。図8でセンサノード動作時間比較のために、センサノードが動作した際の動作時間と、搭載するバッテリの状態、すなわち電池容量と電池電圧の時間変化を示す。ここでは、動作していない時間に、電池の電圧が降下電圧計数×回復電圧計数までに回復するように、1時間に1回、動作させることを想定している。図8の動作時間は動作回数をも表している。
【0071】
従来手法による処理は、最も放電量の少ない処理を繰り返すため電池容量は多い(図8(b)J)が、電池電圧は、電圧降下によりセンサノードの動作可能最低電圧である2.3V以下となる(図8(b)K)ため、バッテリに電力量が残っているにも関らず1400時間しかセンサノードを動作させることができない。
【0072】
一方、本実施形態による処理は、最初は従来手法と同様に作動シーケンスIDがC1である処理を繰り返し、電池容量をセーブしている(図8(a)M−1,N−1)。しかし、動作時間が1000時間を越えたところで、放電量は増えるが電圧降下の影響が少ない作動シーケンスIDがC3である処理に切り替える(図8(a)M−2,N−2)ため、結果として電池容量を残さず使い切り、3000時間動作させることが可能となる。この切り替えるときの電圧を切替電圧という。
【0073】
図9は、実施の形態2に係るセンサノードの動作時間の一例を示す図である。図10は、図9に係るセンサノードの動作時間の一例を示す図である。図9と図10のグラフ中のP,Q,Rは対応する。ここでのセンサノードに搭載する電池は、電池特性情報IDがB2の電池の場合である。また、図9および図10では、1時間に1回、動作させることを想定している。したがって、動作時間は動作回数を表している。ここでは、動作していない間の自然放電は無視できるものとする。
【0074】
図9を見ると、センサノードを4869時間動作させるためには、切替電圧値を2.67Vに設定するとよいことが分かる。なお、図9のP,Q,Rで示す処理は、切替電圧値を2.3Vから3Vの間で遷移させた場合に最も動作時間の長かった値を動作時間として表記している。
【0075】
図10を見ると、Rで示された作動シーケンスに関する情報の作動シーケンスIDがC2である処理を行ったのち、作動シーケンスに関する情報の作動シーケンスIDがC3である処理を行うことで、センサノードは4869時間動作する。
【0076】
図11は、実施の形態2に係るセンサノードの動作時間のその他の例を示す図である。図12は、図11に係るセンサノードの動作時間の一例を示す図である。図11および図12では、図9および図10と同様に、1時間に1回、動作させることを想定している。したがって、動作時間は動作回数を表している。ここでは、動作していない間の自然放電は無視できるものとする。
【0077】
図11と図12のグラフ中のX,Y,Zは対応する。図9および図10の場合と図11および図12におけるセンサノードの動作は同じであり、ここでのセンサノードに搭載する電池は、電池特性情報IDがB3の電池の場合である。
【0078】
図11を見ると、センサノードを3714時間動作させるためには、切替電圧値を2.59Vに設定するとよいことが分かる。なお、図12中のX,Y,Zで示す処理は、切替電圧値を2.3Vから3Vの間で遷移させた場合に最も動作時間の長かった値を動作時間として表記している。
【0079】
図12を見ると、Yで示された作動シーケンスに関する情報の作動シーケンスIDがC1である処理を行ったのち、作動シーケンスに関する情報の作動シーケンスIDがC3である処理を行うことで、センサノードは3714時間動作する。
【0080】
以下に、図4および図5、図7ないし図10を参照して、センサノードの動作を説明する。センサノードに搭載された電池は、電池特性情報IDがB2の電池とする。
【0081】
センサノード1はセンサ計測処理を開始すると、ノード制御部103はセンサノード1を待機状態から動作状態へ復帰させる。次に、ノード制御部103は、情報格納部105を参照し、電池特性情報とセンサノード1のセンサノード特性情報の作動シーケンスに関する情報を取得する。
【0082】
ノード制御部103は、情報格納部105より作動シーケンスに関する情報を取得すると、電池計測部104へ指示を行い、電池計測部104は、センサノード1の電池電圧の計測を行う。またノード制御部103は算出部109へ指示を行い、算出部109は長時間動作可能な作動シーケンスを算出し、組み合わせにより長時間動作可能となる作動シーケンスの組み合わせと切替電圧値を作動シーケンスに関する情報としてノード制御部103へ伝送する。
【0083】
具体的には、算出部109は、電池特性情報から、実行可能な作動シーケンスに関する情報を取得する。電池特性情報IDがB2の電池の許容最大負荷は600mAである。作動シーケンスに関する情報に記載の処理の瞬間最大消費電流は、搭載する電池の許容最大負荷以下であるので、作動シーケンスに関する情報に記載の処理の作動シーケンスIDがC1,C2,C3である処理は、センサノード1において実行可能な処理であることがわかる。
【0084】
次に、算出部109は、実行可能な作動シーケンスに関する情報を元に各作動シーケンスを実行した際の動作時間を計算する。動作時間は次式より与えられる。
動作時間=Min(公称容量/放電量,(公称電圧−動作終了電圧)/降下電圧)
ここで、Min(A,B)とは、AとBの値を比較し、A<BであればAを、A≧BであればBを出力する関数である。また、降下電圧は、実施の形態1に記載した方法で算出する。
【0085】
センサノード1において、作動シーケンスに関する情報の作動シーケンスIDがC1である処理を行うと、降下電圧は、電池特性情報の回復電圧係数と作動シーケンスに関する情報の降下電圧基数から0.0005と計算できる。センサノード1の動作時間は、作動シーケンスに関する情報の作動シーケンスIDがC1である処理を繰り返すと、
Min(2400/0.36,(3−2.3)/0.0005)=Min(6666.6,1400)=1400
となり、1400時間動作することが分かる。
【0086】
作動シーケンスに関する情報の作動シーケンスIDがC1である処理と作動シーケンスIDがC2である処理を組み合わせたときは、最初に行う処理を切替電圧値以下になるまで実行後、次に指示された処理を行うものとして計算を行う。
【0087】
また、切替電圧値は、電池特性情報の公称電圧と動作終了電圧値の範囲においてセンサノード1に搭載した電池が取りうる値を用いて計算を行う。電池の公称電圧は3Vであり、動作終了電圧は作動シーケンスに関する情報によると2.3Vであることが分かるので、動作可能最低電圧は、2.3Vから3Vの間の値を取る。
【0088】
作動シーケンスに関する情報の作動シーケンスIDがC1である処理と作動シーケンスIDがC2である処理を組み合わせたときの動作時間は、切替電圧値を2.5Vと設定した場合、先に作動シーケンスIDがC1である作動シーケンスが、切替電圧値である2.5Vになるまでの動作時間Aと、動作可能最低電圧が2.5V以下になった後、作動シーケンスIDがC2である作動シーケンスを動作させ、バッテリに残った容量が0になる、もしくは出力電圧が動作終了電圧になるまでの動作時間Bを足し合わせた時間となる。
【0089】
動作時間Aは、
Min(2400/0.36,(3−2.5)/0.0005)=Min(6666.6,1000)=1000
となり、1000時間と計算できる。このとき、バッテリの残容量は、作動シーケンスIDがC1である作動シーケンスを1000時間動作させた時の容量、つまり、
2400−0.36×1000=2040
となる。また、動作時間Bは、
Min(2040/0.44,(2.5−2.3)/0.0002)=Min(4636.3,1000)=1000
となり、1000時間と計算できる。従って、作動シーケンスに関する情報の作動シーケンスIDがC1である処理と作動シーケンスIDがC2である処理を組み合わせた時の動作時間はA+B=2000時間動作することが分かる。
【0090】
ノード制御部103は、算出部109より作動シーケンスの組み合わせ情報と動作可能最低電圧値を受け取ると、選択された作動シーケンスに所望の動作処理、ここではセンサ計測処理が含まれているかを確認する。選択部106は、選択された作動シーケンスに所望の動作処理であるセンサ計測処理が含まれていない場合、作動シーケンスの組み合わせ情報より、最初に実行する作動シーケンスの、次の動作処理を選択する。
【0091】
選択部106は、所望の動作処理、ここではセンサ計測処理が含まれている作動シーケンスが選択されていた場合、計測電圧値と切替電圧値とを比較し、計測電圧値が切替電圧値以上の値であるならば、作動シーケンスを切り替えない。計測電圧値が切替電圧値より低い値であるならば、作動シーケンスの組み合わせ情報より、次に実行する作動シーケンスを選択する。
【0092】
選択部106が作動シーケンスを選択し、ノード制御部103は、その作動シーケンスに従い計測部107へセンサ計測要求を送る。データ生成部108は、計測結果を送信できるデータの形に生成して送信データとし、通信制御部102の指示により送受信部101から基地局2へ向けて送信する。通信制御部102は、送信が完了した事をノード制御部103へ通知してもよい。
【0093】
ノード制御部103は、センサノード1で計測したデータを基地局2へ送信した後、センサノード1の放電量を低減するとともに、センサノード1に搭載した電池の電圧を回復させるため、所定の時間、センサノード1を待機状態にするように指示し、センサノード1は動作状態から待機状態へ遷移する。所定時間が経過すると、センサノード1は待機状態から動作状態へ復帰し、上述の処理を行う。そして、この一連の流れの処理を、搭載する電池残量がなくなるまで繰り返す。
【0094】
図13は、実施の形態2に係る無線センサシステムの、センサノードの動作処理の一例を示すフローチャートである。基本的な動作処理は、実施の形態1に係る無線センサシステムの、センサノード1の動作処理と同じである。電池電圧の計測(ステップS13)の後からセンサの計測(ステップS17)の前まで間に、以下のステップS21ないしステップS26を挿入する。電池電圧の計測(ステップS13)まで、およびセンサの計測(ステップS17)以降は、実施の形態1に係る無線センサシステムの、センサノード1の動作処理と同じである。
【0095】
ノード制御部103の指示で、電池計測部104はセンサノード1の電池の電圧を計測する(ステップS13)。続いて、算出部109は、センサノード1の動作時間と、ステップS12で取得した情報を基に、動作時間および電圧の算出を行い(ステップS21)、作動シーケンスの組み合わせ情報と動作可能最低電圧値をノード制御部103へ伝送する。ノード制御部103より情報を受けて、選択部106は、最も動作時間の長い作動シーケンスの組み合わせの選択を行う(ステップS22)。
【0096】
選択した作動シーケンスに所望の動作処理、ここではセンサ計測処理が含まれていなければ(ステップS23;NO)、選択部106は、計測処理を含む作動シーケンスを選択し(ステップS24)、ステップS17へ進む。選択した作動シーケンスに計測処理が含まれていれば(ステップS23;YES)、そのままステップS25へ進む。
【0097】
選択した作動シーケンスの動作電圧が、所定の切替電圧以上でなければ(ステップS25;NO)、選択部106は、次の計測処理を含む作動シーケンスを選択し(ステップS26)、ステップS17へ進む。選択した作動シーケンスの動作電圧が、所定の切替電圧以上であれば(ステップS25;YES)、そのままステップS17へ進む。
【0098】
ステップS22ないしステップS26において、選択部106で実行する作動シーケンスの選択を終えると、ノード制御部103へ選択した作動シーケンス伝送する。そして、ノード制御部103は、計測部107に指示を行い、選択された作動シーケンスに従って計測部107はセンサの計測を行う(ステップS17)。
【0099】
以上説明したように、本実施の形態2の無線センサシステムによれば、電池残量と供給電圧の関係を考慮した制御が可能となり、結果としてセンサノードの動作時間を延長させることができる。
【0100】
バッテリの特性を考慮した動作手順を繰り返し、バッテリの供給電圧が電子機器の駆動電圧より低くなる可能性がある時に、待機状態におけるバッテリの電圧回復特性を考慮した処理に切り替えることで、バッテリを最大限に活用でき、長時間センサノードが動作することを可能とする。
【0101】
また、センサノードに搭載するバッテリの種別によって、単純に最初は最も放電量の少ない作動シーケンスを選択し、後に電圧降下の影響が少ない作動シーケンスに切り替える処理は行わずに、最もセンサノードの動作時間が長くなる作動シーケンスを実行することが可能となる。結果として、センサノードの動作時間がより長くなる作動シーケンスを実行することが可能となる。
【0102】
実施の形態1および実施の形態2において、電池駆動装置を、無線センサシステムのセンサノードを例に挙げて説明したが、電池駆動装置は上述した例に限られない。また、無線センサシステムはセンサノードと基地局を備え、センサノードと基地局間で送受信を行う構成としたが、必ずしも基地局を備えるとは限らず、また送受信を行うとも限らず、任意に設定可能である。例えば、センサノードは、所定の時間間隔でセンサで計測しつづけた記録を、センサノードに備えたメモリなどの記録装置に記憶し続け、センサノードを回収することで、センサの計測記録を取得できるようにしてもよい。
【0103】
実施の形態1および実施の形態2において、電池駆動装置を無線センサシステムのセンサノードとし、作動シーケンスにより行われる動作処理をセンサでの計測として説明している。例えば、センサでの計測を行う際のセンサは、環境測定のセンサであって、温度、湿度、明るさのそれぞれについて測定センサを備え、動作処理の組み合わせにより作動シーケンスが与えられる。作動シーケンスは、温度のみ、湿度のみ、明るさのみ、温度と湿度、温度と明るさ、湿度と明るさ、温度と湿度と明るさ、の合計7種類の作動シーケンスが設定される。
【0104】
また、上述の例に限らずに、電池駆動装置に複数のデバイスを備えてもよい。例えば、デバイスは、センサ、時刻計測、データ送信のそれぞれの機能部として備えておき、動作処理を行う機能部の組み合わせにより作動シーケンスが与えられる。さらに、センサをセンサごとの動作処理に分けて、動作処理の組み合わせにより作動シーケンスを与えることも可能である。電池で駆動する複数のデバイスのうち、少なくとも2つのデバイスを同時に実行する作動シーケンスと、異なる時間に実行する作動シーケンスを選択できる構成で、それらの作動シーケンスで放電量と降下電圧が異なる場合に、本発明を適用することができる。
【0105】
図14は、図1または図7に示すセンサノードのハードウエア構成の一例を示すブロック図である。センサノード1は、図14に示すように、制御部11、主記憶部12、外部記憶部13、入力部14、センサ15および送受信部16を備える。主記憶部12、外部記憶部13、入力部14および送受信部16はいずれも内部バス10を介して制御部11に接続されている。
【0106】
制御部11はCPU(Central Processing Unit)またはディジタル信号処理装置(DSP:Digital Signal Processor)等から構成され、外部記憶部13に記憶されている制御プログラム19に従って、センサノード1の送受信部101、通信制御部102、ノード制御部103、電池計測部104、情報格納部105、選択部106、計測部107、データ生成部108および算出部109の各処理を実行する。制御部11はまた、FPGA(Field Programmable Gate Array)で構成することもできる。
【0107】
主記憶部12はRAM(Random-Access Memory)等から構成され、制御部11の作業領域として用いられる。
【0108】
外部記憶部13は、ROM(Read-Only Memory)、フラッシュメモリ、ハードディスク等の不揮発性メモリから構成され、センサノード1の処理を制御部11に行わせるための制御プログラム19を予め記憶し、また、制御部11の指示に従って、制御プログラム19が記憶するデータを制御部11に供給し、制御部11から供給されたデータを記憶する。
【0109】
入力部14は、シリアルインタフェースまたはパラレルインタフェースから構成されている。入力部14は、センサ15に接続し、センサ15から各検出データを入力する。
【0110】
送受信部16は、無線送受信機およびそれらと接続するシリアルインタフェースまたはLAN(Local Area Network)インタフェースから構成されている。制御部11は、送受信部16を介して、基地局2に生成データを送信し、予測データを基地局2から受信する。
【0111】
図1または図7に示すセンサノード1の送受信部101、通信制御部102、ノード制御部103、電池計測部104、情報格納部105、選択部106、計測部107、データ生成部108および算出部109の処理は、制御プログラム19が、制御部11、主記憶部12、外部記憶部13、入力部14および送受信部16などを資源として用いて処理することによって実行する。
【0112】
図15は、本発明の実施の形態に係る基地局2の物理的な構成例を示すブロック図である。基地局2は、図15に示すように、制御部21、主記憶部22、外部記憶部23、操作部24、表示部25および送受信部26を備える。主記憶部22、外部記憶部23、操作部24、表示部25および送受信部26はいずれも内部バス20を介して制御部21に接続されている。
【0113】
制御部21はCPU(Central Processing Unit)等から構成され、外部記憶部23に記憶されている通信プログラム29に従って、前述の通信処理を実行する。
【0114】
主記憶部22はRAM(Random-Access Memory)等から構成され、外部記憶部23に記憶されている通信プログラム29をロードし、制御部21の作業領域として用いられる。
【0115】
外部記憶部23は、フラッシュメモリ、ハードディスク、DVD−RAM(Digital Versatile Disc Random-Access Memory)、DVD−RW(Digital Versatile Disc ReWritable)等の不揮発性メモリから構成され、前記の処理を制御部21に行わせるための通信プログラム29を予め記憶し、また、制御部21の指示に従って、この通信プログラム29が記憶するデータを制御部21に供給し、制御部21から供給されたデータを記憶する。
【0116】
操作部24はキーボードおよびマウスなどのポインティングデバイス等と、キーボードおよびポインティングデバイス等を内部バスに接続するインタフェース装置から構成されている。操作部24を介して、センサノード1の識別番号などが入力され、制御部21に供給される。
【0117】
表示部25は、CRT(Cathode Ray Tube)またはLCD(Liquid Crystal Display)などから構成され、センサノード1から受信したデータなどを表示する。
【0118】
送受信部26は、無線送受信機およびそれらと接続するシリアルインタフェースまたはLAN(Local Area Network)インタフェースから構成されている。送受信部26を介して、センサノード1に予測データを送信し、生成データをセンサノード1から受信する。
【0119】
図1または図7に示す基地局2の送受信部201、通信制御部202および受信データ格納部203の処理は、通信プログラム29が、制御部21、主記憶部22、外部記憶部23、操作部24、表示部25および送受信部26などを資源として用いて処理することによって実行する。
【0120】
その他、前記のハードウエア構成やフローチャートは一例であり、任意に変更および修正が可能である。
【0121】
センサノード1の主記憶部12、外部記憶部13、入力部14および送受信部16、および基地局2の制御部21、主記憶部22、外部記憶部23、操作部24、表示部25および送受信部26などから構成される無線センサシステムの処理を行う中心となる部分は、専用のシステムによらず、通常のコンピュータシステムを用いて実現可能である。たとえば、前記の動作を実行するためのコンピュータプログラムを、コンピュータが読み取り可能な記録媒体(フレキシブルディスク、CD−ROM、DVD−ROM等)に格納して配布し、当該コンピュータプログラムをコンピュータにインストールすることにより、前記の処理を実行するセンサノード1または基地局2を構成してもよい。また、インターネット等の通信ネットワーク上のサーバ装置が有する記憶装置に当該コンピュータプログラムを格納しておき、通常のコンピュータシステムがダウンロード等することでセンサノード1または基地局2を構成してもよい。
【0122】
また、センサノード1または基地局2の機能を、OS(オペレーティングシステム)とアプリケーションプログラムの分担、またはOSとアプリケーションプログラムとの協働により実現する場合などには、アプリケーションプログラム部分のみを記録媒体や記憶装置に格納してもよい。
【0123】
また、搬送波にコンピュータプログラムを重畳し、通信ネットワークを介して配信することも可能である。たとえば、通信ネットワーク上の掲示板(BBS, Bulletin Board System)に前記コンピュータプログラムを掲示し、ネットワークを介して前記コンピュータプログラムを配信してもよい。そして、このコンピュータプログラムを起動し、OSの制御下で、他のアプリケーションプログラムと同様に実行することにより、前記の処理を実行できるように構成してもよい。
【0124】
上記の実施形態の一部または全部は、以下の付記のようにも記載されうるが、以下には限られない。
【0125】
(付記1)同時に作動可能な2以上のデバイスを含む複数のデバイスと、
前記複数のデバイスを駆動する電力を給電する電池と、
前記複数のデバイスを駆動する1回の動作で、前記複数のデバイスのうち2以上のデバイスを同時に作動させるシーケンスと、当該2以上のデバイスのうち少なくとも1つを異なる時間に作動させるシーケンスと、を含む2以上の作動シーケンスから1つの作動シーケンスを選択する選択手段と、
前記電池の公称電圧と動作可能最低電圧の間の所定の切替電圧の情報を記憶する手段と、
前記作動シーケンスごとの、1回の動作の放電量および電圧低下量の情報を取得する情報取得手段と、
前記電池の電圧を計測する計測手段と、
前記選択手段で選択した作動シーケンスに従って、前記複数のデバイスを駆動する手段と、
を備え、
前記選択手段は、前記電池の電圧が前記切替電圧以上の場合に、前記放電量が最小の作動シーケンスを選択し、前記電池の電圧が前記切替電圧未満の場合に、前記電圧低下量が最小の作動シーケンスを選択する、
ことを特徴とする電池駆動装置。
【0126】
(付記2)前記作動シーケンスごとの動作回数と該作動シーケンスの放電量の積の和が、前記電池の公称容量を超えない範囲で、前記電池の公称電圧と、前記公称電圧以下で前記動作可能最低電圧以上の基準電圧との差を前記最小放電量の作動シーケンスの電圧低下量で除した値と、前記基準電圧と前記動作可能最低電圧との差を前記最小の電圧低下量で除した値と、の合計が最大になる基準電圧を、前記切替電圧として設定する手段を備えることを特徴とする付記1に記載の電池駆動装置。
【0127】
(付記3)前記作動シーケンスごとの、単位回復電圧における降下電圧を表す降下電圧基数と、前記電池の回復電圧係数を記憶する手段を備え、
前記情報取得手段は、前記降下電圧基数と前記回復電圧係数とから前記電圧低下量を算出する、
ことを特徴とする付記1または2に記載の電池駆動装置。
【0128】
(付記4)前記複数のデバイスはそれぞれ、前記電池駆動装置の周囲の状態を検出するセンサを含み、
前記1回の動作ごとに前記複数のデバイスを駆動した結果の情報を無線で通信する手段を備える、
ことを特徴とする付記1ないし3のいずれかに記載の電池駆動装置。
【0129】
(付記5)同時に作動可能な2以上のデバイスを含む複数のデバイスを、電池で駆動する電池駆動装置が行う電池駆動方法であって、
前記複数のデバイスを駆動する1回の動作で、前記複数のデバイスのうち2以上のデバイスを同時に作動させるシーケンスと、当該2以上のデバイスのうち少なくとも1つを異なる時間に作動させるシーケンスと、を含む2以上の作動シーケンスから1つの作動シーケンスを選択する選択ステップと、
前記電池の公称電圧と動作可能最低電圧の間の所定の切替電圧の情報を取得するステップと、
前記作動シーケンスごとの、1回の動作の放電量および電圧低下量の情報を取得する情報取得ステップと、
前記電池の電圧を計測する計測ステップと、
前記選択ステップで選択した作動シーケンスに従って、前記複数のデバイスを駆動するステップと、
を備え、
前記選択ステップは、前記電池の電圧が前記切替電圧以上の場合に、前記放電量が最小の作動シーケンスを選択し、前記電池の電圧が前記切替電圧未満の場合に、前記電圧低下量が最小の作動シーケンスを選択する、
ことを特徴とする電池駆動方法。
【0130】
(付記6)前記作動シーケンスごとの動作回数と該作動シーケンスの放電量の積の和が、前記電池の公称容量を超えない範囲で、前記電池の公称電圧と、前記公称電圧以下で前記動作可能最低電圧以上の基準電圧との差を前記最小放電量の作動シーケンスの電圧低下量で除した値と、前記基準電圧と前記動作可能最低電圧との差を前記最小の電圧低下量で除した値と、の合計が最大になる基準電圧を、前記切替電圧として設定するステップを備えることを特徴とする付記5に記載の電池駆動方法。
【0131】
(付記7)前記情報取得ステップは、単位回復電圧における降下電圧を表す降下電圧基数と前記電池の回復電圧係数とから前記電圧低下量を算出する、ことを特徴とする付記5または6に記載の電池駆動方法。
【0132】
(付記8)前記複数のデバイスはそれぞれ、前記電池駆動装置の周囲の状態を検出するセンサを含み、
前記1回の動作ごとに前記複数のデバイスを駆動した結果の情報を無線で通信するステップを備える、
ことを特徴とする付記5ないし7のいずれかに記載の電池駆動方法。
【0133】
(付記9)コンピュータに、
電池の公称電圧と動作可能最低電圧の間の所定の切替電圧の情報を取得するステップと、
複数のデバイスを駆動する1回の動作で、前記複数のデバイスのうち2以上のデバイスを同時に作動させるシーケンスと、当該2以上のデバイスのうち少なくとも1つを異なる時間に作動させるシーケンスと、を含む2以上の作動シーケンスごとの、1回の動作の放電量および電圧低下量の情報を取得する情報取得ステップと、
前記電池の電圧を計測する計測ステップと、
前記電池の電圧が前記切替電圧以上の場合に、前記放電量が最小の作動シーケンスを選択し、前記電池の電圧が前記切替電圧未満の場合に、前記電圧低下量が最小の作動シーケンスを選択する選択ステップと、
前記選択ステップで選択した作動シーケンスに従って、前記複数のデバイスを駆動するステップと、
を実行させることを特徴とするプログラム。
【産業上の利用可能性】
【0134】
本発明は、無線センサシステムにおける各センサノードの電池残量を考慮することで、放電量の低減および長寿命化を実現することが可能であり、また、無線通信システム、特に、各無線ノードにおける省電力化が重要な電子タグシステムやセンサネットワークシステムなどに適用可能である。
【0135】
また、本発明の電池駆動装置は、無線通信を行う無線センサシステムのセンサノードに限らずに、乾電池やボタン型電池などで駆動する電池駆動装置に適用可能である。電池駆動であれば、その形態や用途を問わず、さまざまな電池駆動装置に適用可能である。
【符号の説明】
【0136】
1 センサノード
2 基地局
11 制御部
12 主記憶部
13 外部記憶部
14 入力部
15 センサ
16 送受信部
19 制御プログラム
21 制御部
22 主記憶部
23 外部記憶部
24 操作部
25 表示部
26 送受信部
29 通信プログラム
101 送受信部
102 通信制御部
103 ノード制御部
104 電池計測部
105 情報格納部
106 選択部
107 計測部
108 データ生成部
109 算出部
201 送受信部
202 通信制御部
203 受信データ格納部
【特許請求の範囲】
【請求項1】
同時に作動可能な2以上のデバイスを含む複数のデバイスと、
前記複数のデバイスを駆動する電力を給電する電池と、
前記複数のデバイスを駆動する1回の動作で、前記複数のデバイスのうち2以上のデバイスを同時に作動させるシーケンスと、当該2以上のデバイスのうち少なくとも1つを異なる時間に作動させるシーケンスと、を含む2以上の作動シーケンスから1つの作動シーケンスを選択する選択手段と、
前記電池の公称電圧と動作可能最低電圧の間の所定の切替電圧の情報を記憶する手段と、
前記作動シーケンスごとの、1回の動作の放電量および電圧低下量の情報を取得する情報取得手段と、
前記電池の電圧を計測する計測手段と、
前記選択手段で選択した作動シーケンスに従って、前記複数のデバイスを駆動する手段と、
を備え、
前記選択手段は、前記電池の電圧が前記切替電圧以上の場合に、前記放電量が最小の作動シーケンスを選択し、前記電池の電圧が前記切替電圧未満の場合に、前記電圧低下量が最小の作動シーケンスを選択する、
ことを特徴とする電池駆動装置。
【請求項2】
前記作動シーケンスごとの動作回数と該作動シーケンスの放電量の積の和が、前記電池の公称容量を超えない範囲で、前記電池の公称電圧と、前記公称電圧以下で前記動作可能最低電圧以上の基準電圧との差を前記最小放電量の作動シーケンスの電圧低下量で除した値と、前記基準電圧と前記動作可能最低電圧との差を前記最小の電圧低下量で除した値と、の合計が最大になる基準電圧を、前記切替電圧として設定する手段を備えることを特徴とする請求項1に記載の電池駆動装置。
【請求項3】
前記作動シーケンスごとの、単位回復電圧における降下電圧を表す降下電圧基数と、前記電池の回復電圧係数を記憶する手段を備え、
前記情報取得手段は、前記降下電圧基数と前記回復電圧係数とから前記電圧低下量を算出する、
ことを特徴とする請求項1または2に記載の電池駆動装置。
【請求項4】
前記複数のデバイスはそれぞれ、前記電池駆動装置の周囲の状態を検出するセンサを含み、
前記1回の動作ごとに前記複数のデバイスを駆動した結果の情報を無線で通信する手段を備える、
ことを特徴とする請求項1ないし3のいずれか1項に記載の電池駆動装置。
【請求項5】
同時に作動可能な2以上のデバイスを含む複数のデバイスを、電池で駆動する電池駆動装置が行う電池駆動方法であって、
前記複数のデバイスを駆動する1回の動作で、前記複数のデバイスのうち2以上のデバイスを同時に作動させるシーケンスと、当該2以上のデバイスのうち少なくとも1つを異なる時間に作動させるシーケンスと、を含む2以上の作動シーケンスから1つの作動シーケンスを選択する選択ステップと、
前記電池の公称電圧と動作可能最低電圧の間の所定の切替電圧の情報を取得するステップと、
前記作動シーケンスごとの、1回の動作の放電量および電圧低下量の情報を取得する情報取得ステップと、
前記電池の電圧を計測する計測ステップと、
前記選択ステップで選択した作動シーケンスに従って、前記複数のデバイスを駆動するステップと、
を備え、
前記選択ステップは、前記電池の電圧が前記切替電圧以上の場合に、前記放電量が最小の作動シーケンスを選択し、前記電池の電圧が前記切替電圧未満の場合に、前記電圧低下量が最小の作動シーケンスを選択する、
ことを特徴とする電池駆動方法。
【請求項6】
前記作動シーケンスごとの動作回数と該作動シーケンスの放電量の積の和が、前記電池の公称容量を超えない範囲で、前記電池の公称電圧と、前記公称電圧以下で前記動作可能最低電圧以上の基準電圧との差を前記最小放電量の作動シーケンスの電圧低下量で除した値と、前記基準電圧と前記動作可能最低電圧との差を前記最小の電圧低下量で除した値と、の合計が最大になる基準電圧を、前記切替電圧として設定するステップを備えることを特徴とする請求項5に記載の電池駆動方法。
【請求項7】
前記情報取得ステップは、単位回復電圧における降下電圧を表す降下電圧基数と前記電池の回復電圧係数とから前記電圧低下量を算出する、ことを特徴とする請求項5または6に記載の電池駆動方法。
【請求項8】
前記複数のデバイスはそれぞれ、前記電池駆動装置の周囲の状態を検出するセンサを含み、
前記1回の動作ごとに前記複数のデバイスを駆動した結果の情報を無線で通信するステップを備える、
ことを特徴とする請求項5ないし7のいずれか1項に記載の電池駆動方法。
【請求項9】
コンピュータに、
電池の公称電圧と動作可能最低電圧の間の所定の切替電圧の情報を取得するステップと、
複数のデバイスを駆動する1回の動作で、前記複数のデバイスのうち2以上のデバイスを同時に作動させるシーケンスと、当該2以上のデバイスのうち少なくとも1つを異なる時間に作動させるシーケンスと、を含む2以上の作動シーケンスごとの、1回の動作の放電量および電圧低下量の情報を取得する情報取得ステップと、
前記電池の電圧を計測する計測ステップと、
前記電池の電圧が前記切替電圧以上の場合に、前記放電量が最小の作動シーケンスを選択し、前記電池の電圧が前記切替電圧未満の場合に、前記電圧低下量が最小の作動シーケンスを選択する選択ステップと、
前記選択ステップで選択した作動シーケンスに従って、前記複数のデバイスを駆動するステップと、
を実行させることを特徴とするプログラム。
【請求項1】
同時に作動可能な2以上のデバイスを含む複数のデバイスと、
前記複数のデバイスを駆動する電力を給電する電池と、
前記複数のデバイスを駆動する1回の動作で、前記複数のデバイスのうち2以上のデバイスを同時に作動させるシーケンスと、当該2以上のデバイスのうち少なくとも1つを異なる時間に作動させるシーケンスと、を含む2以上の作動シーケンスから1つの作動シーケンスを選択する選択手段と、
前記電池の公称電圧と動作可能最低電圧の間の所定の切替電圧の情報を記憶する手段と、
前記作動シーケンスごとの、1回の動作の放電量および電圧低下量の情報を取得する情報取得手段と、
前記電池の電圧を計測する計測手段と、
前記選択手段で選択した作動シーケンスに従って、前記複数のデバイスを駆動する手段と、
を備え、
前記選択手段は、前記電池の電圧が前記切替電圧以上の場合に、前記放電量が最小の作動シーケンスを選択し、前記電池の電圧が前記切替電圧未満の場合に、前記電圧低下量が最小の作動シーケンスを選択する、
ことを特徴とする電池駆動装置。
【請求項2】
前記作動シーケンスごとの動作回数と該作動シーケンスの放電量の積の和が、前記電池の公称容量を超えない範囲で、前記電池の公称電圧と、前記公称電圧以下で前記動作可能最低電圧以上の基準電圧との差を前記最小放電量の作動シーケンスの電圧低下量で除した値と、前記基準電圧と前記動作可能最低電圧との差を前記最小の電圧低下量で除した値と、の合計が最大になる基準電圧を、前記切替電圧として設定する手段を備えることを特徴とする請求項1に記載の電池駆動装置。
【請求項3】
前記作動シーケンスごとの、単位回復電圧における降下電圧を表す降下電圧基数と、前記電池の回復電圧係数を記憶する手段を備え、
前記情報取得手段は、前記降下電圧基数と前記回復電圧係数とから前記電圧低下量を算出する、
ことを特徴とする請求項1または2に記載の電池駆動装置。
【請求項4】
前記複数のデバイスはそれぞれ、前記電池駆動装置の周囲の状態を検出するセンサを含み、
前記1回の動作ごとに前記複数のデバイスを駆動した結果の情報を無線で通信する手段を備える、
ことを特徴とする請求項1ないし3のいずれか1項に記載の電池駆動装置。
【請求項5】
同時に作動可能な2以上のデバイスを含む複数のデバイスを、電池で駆動する電池駆動装置が行う電池駆動方法であって、
前記複数のデバイスを駆動する1回の動作で、前記複数のデバイスのうち2以上のデバイスを同時に作動させるシーケンスと、当該2以上のデバイスのうち少なくとも1つを異なる時間に作動させるシーケンスと、を含む2以上の作動シーケンスから1つの作動シーケンスを選択する選択ステップと、
前記電池の公称電圧と動作可能最低電圧の間の所定の切替電圧の情報を取得するステップと、
前記作動シーケンスごとの、1回の動作の放電量および電圧低下量の情報を取得する情報取得ステップと、
前記電池の電圧を計測する計測ステップと、
前記選択ステップで選択した作動シーケンスに従って、前記複数のデバイスを駆動するステップと、
を備え、
前記選択ステップは、前記電池の電圧が前記切替電圧以上の場合に、前記放電量が最小の作動シーケンスを選択し、前記電池の電圧が前記切替電圧未満の場合に、前記電圧低下量が最小の作動シーケンスを選択する、
ことを特徴とする電池駆動方法。
【請求項6】
前記作動シーケンスごとの動作回数と該作動シーケンスの放電量の積の和が、前記電池の公称容量を超えない範囲で、前記電池の公称電圧と、前記公称電圧以下で前記動作可能最低電圧以上の基準電圧との差を前記最小放電量の作動シーケンスの電圧低下量で除した値と、前記基準電圧と前記動作可能最低電圧との差を前記最小の電圧低下量で除した値と、の合計が最大になる基準電圧を、前記切替電圧として設定するステップを備えることを特徴とする請求項5に記載の電池駆動方法。
【請求項7】
前記情報取得ステップは、単位回復電圧における降下電圧を表す降下電圧基数と前記電池の回復電圧係数とから前記電圧低下量を算出する、ことを特徴とする請求項5または6に記載の電池駆動方法。
【請求項8】
前記複数のデバイスはそれぞれ、前記電池駆動装置の周囲の状態を検出するセンサを含み、
前記1回の動作ごとに前記複数のデバイスを駆動した結果の情報を無線で通信するステップを備える、
ことを特徴とする請求項5ないし7のいずれか1項に記載の電池駆動方法。
【請求項9】
コンピュータに、
電池の公称電圧と動作可能最低電圧の間の所定の切替電圧の情報を取得するステップと、
複数のデバイスを駆動する1回の動作で、前記複数のデバイスのうち2以上のデバイスを同時に作動させるシーケンスと、当該2以上のデバイスのうち少なくとも1つを異なる時間に作動させるシーケンスと、を含む2以上の作動シーケンスごとの、1回の動作の放電量および電圧低下量の情報を取得する情報取得ステップと、
前記電池の電圧を計測する計測ステップと、
前記電池の電圧が前記切替電圧以上の場合に、前記放電量が最小の作動シーケンスを選択し、前記電池の電圧が前記切替電圧未満の場合に、前記電圧低下量が最小の作動シーケンスを選択する選択ステップと、
前記選択ステップで選択した作動シーケンスに従って、前記複数のデバイスを駆動するステップと、
を実行させることを特徴とするプログラム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【公開番号】特開2012−63907(P2012−63907A)
【公開日】平成24年3月29日(2012.3.29)
【国際特許分類】
【出願番号】特願2010−206604(P2010−206604)
【出願日】平成22年9月15日(2010.9.15)
【国等の委託研究の成果に係る記載事項】(出願人による申告)平成20年度、独立行政法人新エネルギー・産業技術総合開発機構、エネルギー使用合理化技術戦略的開発、エネルギー有効利用基盤技術先導研究開発、インテリジェントタップを用いた簡易型HEMSの研究開発に係る委託事業、産業技術力強化法第19条の適用を受ける特許出願
【出願人】(390001395)NECシステムテクノロジー株式会社 (438)
【Fターム(参考)】
【公開日】平成24年3月29日(2012.3.29)
【国際特許分類】
【出願日】平成22年9月15日(2010.9.15)
【国等の委託研究の成果に係る記載事項】(出願人による申告)平成20年度、独立行政法人新エネルギー・産業技術総合開発機構、エネルギー使用合理化技術戦略的開発、エネルギー有効利用基盤技術先導研究開発、インテリジェントタップを用いた簡易型HEMSの研究開発に係る委託事業、産業技術力強化法第19条の適用を受ける特許出願
【出願人】(390001395)NECシステムテクノロジー株式会社 (438)
【Fターム(参考)】
[ Back to top ]