
電池駆動装置、電池駆動方法およびプログラム
【課題】装置コストおよび計算コストが低く、電池の温度特性による影響を考慮して、電池で駆動する動作時間を延長させることができる電池駆動装置、電池駆動方法およびプログラムを提供する。
【解決手段】センサノード1の温度センサ11は、センサノード1の周辺温度を計測し、計測結果を示す計測データを駆動間隔算出部16に送る。駆動間隔算出部16は、温度センサ11から受け取った計測データから、記憶部15が記憶する駆動間隔評価関数を用いて、温度センサ11、湿度センサ12、照度センサ13および気圧センサ14の駆動間隔を算出する。駆動部17は、駆動間隔算出部16が算出した駆動間隔で、温度センサ11、湿度センサ12、照度センサ13および気圧センサ14を駆動させる。電池18は、各センサに駆動電力を供給する。送信部19は、温度センサ11、湿度センサ12、照度センサ13および気圧センサ14の計測データを外部に送信する。
【解決手段】センサノード1の温度センサ11は、センサノード1の周辺温度を計測し、計測結果を示す計測データを駆動間隔算出部16に送る。駆動間隔算出部16は、温度センサ11から受け取った計測データから、記憶部15が記憶する駆動間隔評価関数を用いて、温度センサ11、湿度センサ12、照度センサ13および気圧センサ14の駆動間隔を算出する。駆動部17は、駆動間隔算出部16が算出した駆動間隔で、温度センサ11、湿度センサ12、照度センサ13および気圧センサ14を駆動させる。電池18は、各センサに駆動電力を供給する。送信部19は、温度センサ11、湿度センサ12、照度センサ13および気圧センサ14の計測データを外部に送信する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、電池駆動装置、電池駆動方法およびプログラムに関する。
【背景技術】
【0002】
近年、通信機能を有する複数のセンサノードによりネットワークを構築し、該センサノードが個々にまたは連携して計測した情報を収集するセンサネットワークが開発されている。特に、センサノードの通信機能を無線化し、センサノードを設置する際の配線を不要にするワイヤレスセンサネットワークが注目を集めている。
【0003】
ワイヤレスセンサネットワークにおけるセンサノードの電源は、電池(たとえば、乾電池、ボタン電池等)から供給することが多い。こうしたセンサノードを電池駆動センサノードと呼ぶことがある。以下では、特に区別する必要がある場合を除いて、電池駆動センサノードのことを単にセンサノードと記述する。
【0004】
さらに、センサネットワークを構築するためのセンサノードはどこにでも設置できるという要件を満たすために、小型であることが好ましい。
【0005】
ワイヤレスセンサネットワークの代表的な用途に、環境情報収集がある。環境情報収集は、環境センサ(たとえば、温度センサ、湿度センサ、照度センサ等)を搭載したセンサノードを用いてワイヤレスセンサネットワークを構築することにより、センサノード設置場所周辺の環境情報(たとえば、温度、湿度、照度等)を収集するものである。このとき、センサノードは、一定周期で環境情報を計測し、無線基地局に対して環境情報の送信を繰り返すような動作をすることが多い。
【0006】
センサノードは、電池が切れた場合の充電作業や、電池の交換作業等の手間を省くため、一度取り付けた電池により数ヶ月ないし数年間、ときにはそれ以上動作することが望まれる。そのため、センサノードは放電量を抑え、電池の消耗を減らすことが必要となる。すなわち、センサノードの省電力化を図り低電力で動作させることにより、センサノードを長時間に渡って動作させることが必要となる。
【0007】
一般的に、電池は低温環境下や高温環境下では放電開始電圧(起電力)が低下し、電圧ドロップ幅が大きくなる。電圧ドロップとは、放電中に電池内で電圧が降下していくことをいう。電圧ドロップ幅は、単位時間あたりの電圧ドロップの降下幅である。このため、センサノードでは、外気温によっては長時間に渡る動作(たとえば、前述した環境情報収集のような動作)を継続すると、電圧ドロップの影響で動作可能電圧を下回って動作が中断されたり、電池寿命が短くなったりする恐れが生じる。
【0008】
従って、センサノードは、電池の温度特性による影響を考慮して長時間動作することが求められる。
【0009】
特許文献1には、バッテリ残量を監視してハイバネーション状態等のシステムステートを制御する場合に、バッテリを実際に使用することが可能な時間を長くすることで、ユーザの利便性を高める情報処理装置及びバッテリ装置が提示されている。特許文献1の技術は、バッテリ残量を示す情報と、ハイバネーション状態等に遷移させるための遷移条件として、バッテリ残量だけではなくバッテリの環境条件や劣化状態等に基づいて、システムステートの遷移制御を行い、状態遷移に要する電力の余力分をユーザの使用可能な電力として融通することができる。
【0010】
特許文献2には、通信トラヒックの観点から、バッテリの駆動時間をできる限り延長させる無線通信装置等が提示されている。特許文献2の無線通信装置は、バッテリのバッテリ状態を監視し、バッテリ状態に基づいて、チャージリカバリ効果が得られるデータ時間間隔を決定する。そして、そのデータ時間間隔で送信バッファからデータを取り出すように制御する。また、特許文献2の無線通信装置は、バッテリ電圧、充放電履歴、外部気温等のパラメータから、バッテリ残容量を予測する。
【0011】
特許文献3には、端末の処理に必要な機能に応じたバッテリ容量を推測でき、端末使用中の機能停止を防止して端末を安定使用できる携帯情報端末が提案されている。特許文献3の携帯情報端末は、バッテリの電源供給を受けて駆動されるバッテリ駆動対象を備え、各バッテリ駆動対象の動作制御時に検出されたバッテリの充放電回数に基づく放電特性と、この放電特性上の現在のバッテリ電圧に基づき、現在のバッテリ電圧で動作させようとするバッテリ駆動対象が安定駆動不能な場合には、このバッテリ駆動対象の動作を一部または全て規制制御し、バッテリ駆動対象の途中停止や装置全体の途中停止を未然に防止する。
【0012】
特許文献4では、電源として発電機と電池を具備した電子機器において、電池の寿命を延ばすことで電池交換が殆ど不要な電子機器が提案されている。特許文献4の電子機器は、発電機から電力を供給するか電池から電力を供給するかの判定をし、その判定結果に基づいて、センサノードにおける間欠動作の制御を行う。
【0013】
特許文献5には、省エネ性を確保しつつ、全体として快適な環境制御を行う環境制御システムが提示されている。特許文献5の環境制御システムでは、複数の環境制御機器の各々にセンサノードを接続し、センサノードにより測定した環境情報と、当該センサノードの近傍に存在する他センサノードの情報とをサーバに送信する。サーバにおいて、各機器制御信号の合計が所定の範囲となるように、近傍のセンサノード間の機器制御信号の差をできるだけ小さくした機器制御信号を生成する。これにより、環境制御機器全体の出力を所定の範囲に収めると同時に、近傍に存在する環境制御機器間の出力(たとえば、明るさ等)を滑らかに変化させることができるので、全体の消費電力を考慮するとともに、人の快適性に配慮した環境制御を行うことができる。
【0014】
特許文献6には、省電力化のために一定時間間隔で動作状態と休止状態を繰り返す間欠動作を行う複数のセンサノード間の時刻を高精度に同期させるノード時刻同期方法が提示されている。
【0015】
特許文献7には、非常に混雑した通信環境において異常現象が発生した場合に、通信輻輳を防止しながらセンサノードが所定の情報をなるべく早くセンサネットサーバに伝達する通信制御方法が提示されている。
【0016】
特許文献8には、 新品の状態からライフエンド状態に放電特性が変動しても、実質的な電池寿命を大幅に延命させて、電池交換負担を軽減できる携帯型電子装置が提示されている。特許文献8の携帯型電子装置は、放電終止電圧に到達するまで放電電流を一定とするように負荷デバイスに対する負荷電流を制御した状態で、サブCPUが検出された電池の電圧値の変動状態を演算処理して電池の放電特性を識別判定し、該判定した放電特性に応じて電池残量判定基準値を自動変更し、各電池残量判定基準値と検出された電池パックの電圧値とを比較して電池の電池残量を判定する。
【先行技術文献】
【特許文献】
【0017】
【特許文献1】特開2004−334475号公報
【特許文献2】特開2007−295052号公報
【特許文献3】特開2003−140785号公報
【特許文献4】特開2006−204024号公報
【特許文献5】特開2007−249647号公報
【特許文献6】特開2010−016576号公報
【特許文献7】特開2010−020504号公報
【特許文献8】特開平08−126216号公報
【発明の概要】
【発明が解決しようとする課題】
【0018】
しかしながら、特許文献1に記載された技術はバッテリの残量が閾値以下になった場合にハイバーネーション状態に遷移させるだけのものに過ぎない。また、復帰して継続動作をするための手段としてACアダプタからの電力供給を用いるため、電池駆動のセンサノードに対してそのまま適用することはできない。さらに、特許文献1の技術を用いるためには、「EC」(Embedded Controller:組み込みコントローラ)のようなバッテリ装置の残容量を監視する装置が必要であり、装置コストが高くなる。
【0019】
また、特許文献2に記載の技術では、バッテリ装置の温度特性を考慮するためには、気温のパラメータ等からバッテリ装置の残容量を予測する処理を必要とするため、計算コストが高くなるという問題が生じる。
【0020】
特許文献3〜8に記載の技術は、バッテリ装置の温度特性を考慮して、電池で駆動するデバイスの動作時間を延長させるものではない。
【0021】
本発明は、上述の事情に鑑みてなされたもので、装置コストおよび計算コストが低く、電池の温度特性による影響を考慮して、電池で駆動する動作時間を延長させることができる電池駆動装置、電池駆動方法およびプログラムを提供することを目的とする。
【課題を解決するための手段】
【0022】
本発明の第1の観点に係る電池駆動装置は、
少なくとも周辺温度を計測する温度センサを含むデバイスと、
前記デバイスの駆動電力を給電する電池と、
前記電池の温度特性から算出した温度と前記デバイスの駆動間隔との関係を示す駆動間隔評価関数を記憶する記憶手段と、
前記温度センサの計測結果を示す計測データから、前記駆動間隔評価関数を用いて駆動間隔を算出する駆動間隔算出手段と、
前記駆動間隔算出手段が算出した前記駆動間隔で前記デバイスを駆動させる駆動手段と、
を備えることを特徴とする。
【0023】
本発明の第2の観点に係る電池駆動方法は、
少なくとも周辺温度を計測する温度センサを含むデバイスと、前記デバイスの駆動電力を給電する電池と、前記電池の温度特性から算出した温度と前記デバイスの駆動間隔との関係を示す駆動間隔評価関数を記憶する記憶手段とを備える電池駆動装置が実行する電池駆動方法であって、
前記温度センサの計測結果を示す計測データを取得する取得ステップと、
前記温度センサの計測データから、前記駆動間隔評価関数を用いて駆動間隔を算出する駆動間隔算出ステップと、
前記駆動間隔算出ステップで算出した前記駆動間隔で前記デバイスを駆動させる駆動ステップと、
を備えることを特徴とする。
【0024】
本発明の第3の観点に係るプログラムは、コンピュータに、
デバイスに含まれる温度センサの計測結果を示す計測データを取得する取得ステップと、
前記温度センサの計測データから、前記デバイスの駆動電力を給電する電池の温度特性から算出した温度と前記デバイスの駆動間隔との関係を示す駆動間隔評価関数を用いて駆動間隔を算出する駆動間隔算出ステップと、
前記駆動間隔算出ステップで算出した前記駆動間隔で前記デバイスを駆動させる駆動ステップと、
を実行させることを特徴とする。
【発明の効果】
【0025】
本発明によれば、装置コストおよび計算コストが低く、電池の温度特性による影響を考慮して、電池で駆動する動作時間を延長させることができる。
【図面の簡単な説明】
【0026】
【図1】本発明の実施の形態に係るセンサノードの構成例を示すブロック図である。
【図2】実施の形態に係る電池の温度特性の一例を示す図である。
【図3】実施の形態に係る駆動間隔評価関数の一例を示す図である。
【図4】実施の形態に係るセンサノードの動作の一例を示すフローチャートである。
【図5】実施の形態に係るセンサノードの動作の一例を示すフローチャートである。
【図6】実施の形態に係るセンサノードのハードウェア構成の一例を示すブロック図である。
【発明を実施するための形態】
【0027】
以下、本発明の実施の形態について図面を参照しながら詳細に説明する。なお、図中同一または相当部分には同一符号を付す。
【0028】
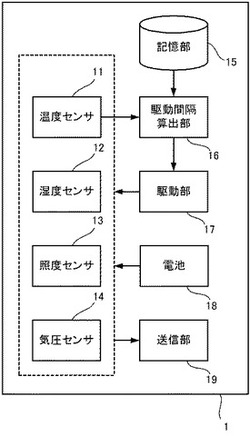
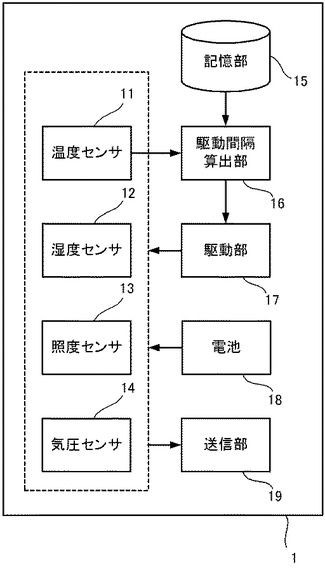
図1は、本発明の実施の形態に係るセンサノードの構成例を示すブロック図である。本実施の形態おける電池駆動装置として、電池駆動式のセンサノード1を例に挙げて説明する。また、電池駆動装置(センサノード1)が備えるデバイスは、周辺温度を計測する温度センサを含む電池駆動装置の周囲の状態を計測するセンサ群(図中、破線で囲む)とする。
【0029】
センサノード1は、温度センサ11、湿度センサ12、照度センサ13、気圧センサ14、記憶部15、駆動間隔算出部16、駆動部17、電池18および送信部19を備える。
【0030】
温度センサ11は、センサノード1の周辺温度を計測し、計測結果を示す計測データを駆動間隔算出部16および送信部19に送る。温度センサ11の種類は問わず、たとえば、測温抵抗体、熱電対、サーミスタ等を用いることができる。駆動間隔算出部16に計測データを送る温度センサは、送信部19に計測データを送る温度センサとは別の温度センサでもよい。
【0031】
湿度センサ12は、センサノード1の周辺湿度を計測し、計測結果を示す計測データを送信部19に送る。
【0032】
照度センサ13は、センサノード1の周辺照度を計測し、計測結果を示す計測データを送信部19に送る。
【0033】
気圧センサ14は、センサノード1の周辺気圧を計測し、計測結果を示す計測データを送信部19に送る。
【0034】
記憶部15は、電池18の温度特性から算出した温度と駆動間隔の関係を示す駆動間隔評価関数をあらかじめ記憶する。駆動間隔評価関数とは、温度から駆動間隔を算出するための演算規則や係数、定数などである。記憶部15はこれらを示す情報を記憶する。駆動間隔評価関数の詳細は後述する。
【0035】
駆動間隔算出部16は、温度センサ11から受け取った計測データから、記憶部15が記憶する駆動間隔評価関数を用いて、温度センサ11、湿度センサ12、照度センサ13および気圧センサ14の駆動間隔を算出する。駆動間隔は、センサごとに個別に算出してもよいし、共通に算出してもよい。駆動間隔評価関数は、駆動間隔算出部16が外部から取得してもよいし、駆動間隔算出部16があらかじめ電池18の温度特性に基づいて算出しておいてもよい。
【0036】
駆動部17は、駆動間隔算出部16が算出した駆動間隔で、温度センサ11、湿度センサ12、照度センサ13および気圧センサ14を駆動させる。
【0037】
電池18は、温度センサ11、湿度センサ12、照度センサ13および気圧センサ14に駆動電力を供給する。
【0038】
送信部19は、温度センサ11、湿度センサ12、照度センサ13および気圧センサ14から受け取った計測データを外部に送信する。無線基地局と無線で通信する複数のセンサノード1で構成される無線センサシステムである場合には、送信部19は、無線基地局に計測データを送信する。無線基地局は、各センサノード1から受信した計測データ蓄積し、集計したり、分析したり、さらに他のサーバに送信したりする。
【0039】
温度センサ11、湿度センサ12、照度センサ13および気圧センサ14は生成した計測データは記憶部15に記憶させてもよい。この場合、送信部19はなくてもよい。温度センサ11、湿度センサ12、照度センサ13および気圧センサ14は、外部に備えてもよい。その場合、センサノード1は各センサから計測データを取得する取得部を備える。
【0040】
また、電池駆動装置1が備えるデバイスは、温度センサ11、湿度センサ12、照度センサ13および気圧センサ14に限らず、加速度センサやガス濃度センサ、音響レベル等、他のセンサでもよいし、他の装置でもよい。また、温度センサ11のみでもよい。すなわち、電池駆動装置1が備えるデバイスは、少なくとも温度センサ11を含む装置であればよい。
【0041】
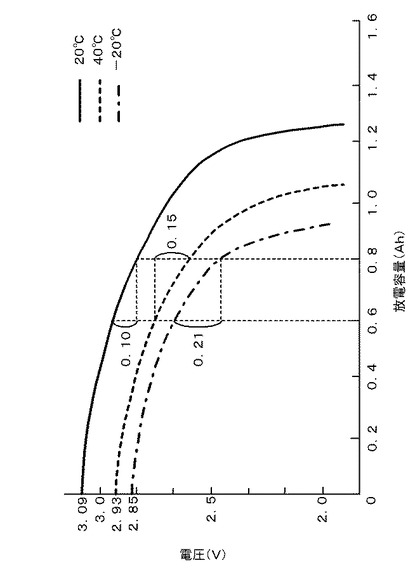
図2は、実施の形態に係る電池の温度特性の一例を示す図である。図2に示すような温度特性を持つ電池を使用する場合、40℃の環境では20℃の環境に比べ起電力が低下し電圧ドロップ幅が大きくなる。−20℃の環境ではさらに起電力が低下し電圧ドロップ幅が大きくなる。たとえば、起電力を比較すると、20℃の環境では3.09V、40℃の環境では2.93V、−20℃の環境では2.85Vと、順に小さくなっている。また、たとえば、放電容量が0.6Ah〜0.8Ahの間の電圧ドロップ幅を比較すると、20℃の環境では0.10V、40℃の環境では0.15V、−20℃の環境では0.21Vと、順に大きくなっている。
【0042】
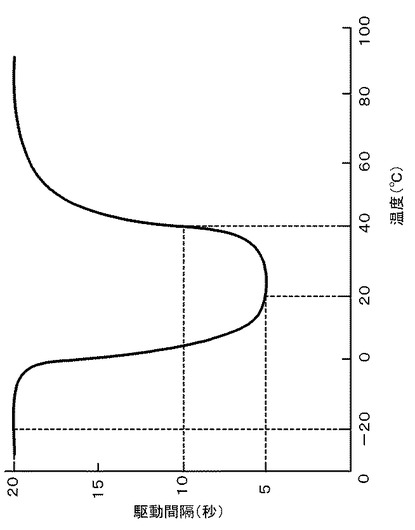
図3は、実施の形態に係る駆動間隔評価関数の一例を示す図である。電池18が図2のような温度特性を持つ場合、たとえば図3に示すような駆動間隔評価関数を用いる。図3の駆動間隔評価関数は、40℃の環境では20℃の環境に比べ起電力の回復時間を多く取るために、駆動間隔を長く設定している。また、−20℃の環境ではさらに多くの起電力回復時間を取るために、駆動間隔をさらに長く設定している。具体的には、温度が20℃の場合の駆動間隔は5秒、温度が40度の場合の駆動間隔は10秒、温度が−20℃の場合の駆動間隔は20秒である。
【0043】
たとえば、記憶部15が図3の駆動間隔評価関数を記憶しているとすると、センサノード1の温度センサ11の計測データが20℃であった場合、駆動間隔算出部16は駆動間隔5秒を算出する。このように電池18の温度特性に基づいて算出した駆動間隔評価関数を用いて各センサの駆動間隔を算出することにより、電圧ドロップの影響で動作可能電圧を下回って動作が中断されたり、電池寿命が短くなったりする可能性を低減させ、センサノード1の動作時間を延長させることができる。
【0044】
図3の例では、駆動間隔評価関数をグラフで表現しているが、実際には、駆動間隔評価関数は、温度と駆動間隔の対応表として記憶されている。たとえば、温度と駆動間隔の対応表では、−50℃〜50℃までの1℃ごとの温度に対応する駆動間隔が設定されている。駆動間隔算出部16は、温度センサ11から受け取った計測データの温度が対応表になかった場合、前後の温度の駆動間隔から近似関数を算出して補間する。このような温度と駆動間隔の対応表は演算規則のひとつである。
【0045】
あるいは、駆動間隔評価関数は、図3に示すような曲線を区間ごとに近似する近似関数としてもよい。この近似関数は、独立変数Xが温度であり、従属変数Yが駆動間隔である。駆動間隔算出部16は、温度センサ11から受け取った計測データの温度をXに代入し、駆動間隔Yを算出する。
【0046】
このように、駆動間隔評価関数は、演算規則、係数、定数などであり、これらは複数であってもよい。電池18に異なる温度特性の電池を用いた場合には、温度特性に合わせて駆動間隔評価関数を定義すればよい。たとえば、異なる温度特性を有する電池を用いる場合、前述の近似関数の係数および定数を変化させて新たな駆動間隔評価関数を定義する。駆動間隔評価関数は、センサノード1が電池18の温度特性から算出してもよいし、外部から取得してもよい。
【0047】
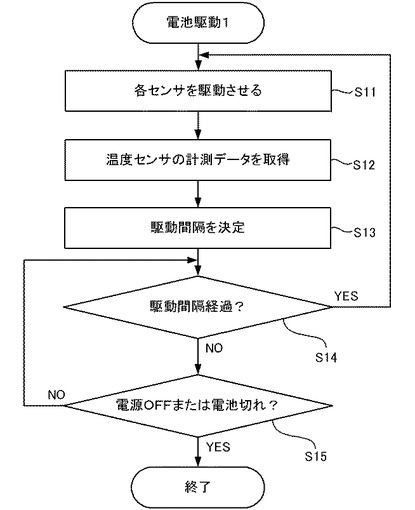
図4は、実施の形態に係るセンサノードの動作の一例を示すフローチャートである。図4の例では、各センサを駆動させるごとに駆動間隔を算出するセンサノード1の動作の例を示す。
【0048】
センサノード1の電源がONになると、まず、駆動部17は、各センサを駆動させる(ステップS11)。駆動間隔算出部16は、温度センサ11からセンサノード1の周辺温度を計測した計測データを受け取る(ステップS12)。駆動間隔算出部16は、記憶部15から駆動間隔評価関数を読み出し、温度センサ11から受け取った計測データから、駆動間隔評価関数を用いて駆動間隔を算出する(ステップS13)。
【0049】
駆動間隔算出部16が算出した駆動間隔を経過した場合(ステップS14;YES)、ステップS11に戻り、ステップS11およびステップS14を繰り返す。駆動間隔算出部16が算出した駆動間隔を経過していない場合(ステップS14;NO)、電源がOFFまたは電池切れになったか否かを判定し(ステップS15)、電源がOFFまたは電池切れになっていない場合(ステップS15;NO)、ステップS14に戻り、ステップS14およびステップS15を繰り返す。電源がOFFまたは電池切れになった場合(ステップS15;YES)、処理を終了する。
【0050】
ステップS14において、ステップS12およびステップS13の実行にかかった時間を考慮してもよい。たとえば、ステップS12およびステップS13の実行に1秒かかっていた場合には、駆動間隔算出部16が算出した駆動間隔−1秒を待機期間とし、ステップS14では待機時間が経過したか否かを判定する。
【0051】
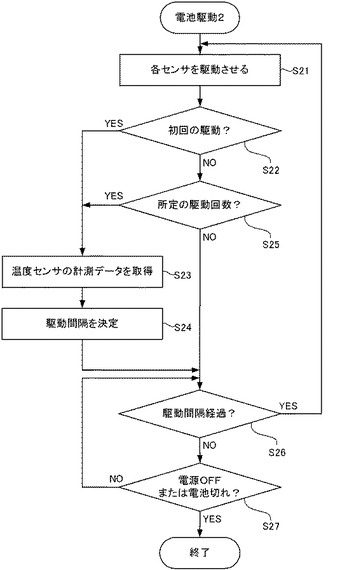
図5は、実施の形態に係るセンサノードの動作の一例を示すフローチャートである。図5の例では、所定の駆動回数ごとに駆動間隔を算出するセンサノード1の動作の例を示す。
【0052】
センサノード1の電源がONになると、まず、駆動部17は、各センサを駆動させる(ステップS21)。これが初回の駆動であった場合(ステップS22;YES)、駆動間隔算出部16は、温度センサ11からセンサノード1の周辺温度を計測した計測データを受け取る(ステップS23)。駆動間隔算出部16は、記憶部15から駆動間隔評価関数を読み出し、温度センサ11から受け取った計測データから、駆動間隔評価関数を用いて駆動間隔を算出する(ステップS24)。
【0053】
駆動間隔算出部16が算出した駆動間隔を経過していない場合(ステップS26;NO)、電源がOFFまたは電池切れになったか否かを判定する(ステップS27)。電源がOFFまたは電池切れになっていない場合(ステップS27;NO)、ステップS26に戻り、ステップS26〜ステップS27を繰り返す。電源がOFFまたは電池切れになった場合(ステップS27;YES)、処理を終了する。
【0054】
一方、駆動間隔算出部16が算出した駆動間隔を経過した場合(ステップS26;YES)、ステップS21に戻り、駆動部17は、各センサを駆動させる。これが初回の駆動でなかった場合(ステップS22:NO)、所定の駆動回数(たとえば、5の倍数の回数)であるか否かを判定する(ステップS25)。
【0055】
所定の駆動回数でない場合(ステップS25;NO)、ステップS26を実行する。所定の駆動回数である場合(ステップS25;YES)、駆動間隔算出部16は、温度センサ11からセンサノード1の周辺温度を計測した計測データを受け取る(ステップS23)。駆動間隔算出部16は、記憶部15から駆動間隔評価関数を読み出し、温度センサ11から受け取った計測データから、駆動間隔評価関数を用いて駆動間隔を算出し(ステップS24)、ステップS26を実行する。
【0056】
駆動間隔算出部16が算出した駆動間隔を経過した場合(ステップS26;YES)、ステップS21に戻り、ステップS21〜ステップS26を繰り返す。駆動間隔算出部16が算出した駆動間隔を経過していない場合(ステップS26;NO)、電源がOFFまたは電池切れになったか否かを判定する(ステップS27)。電源がOFFまたは電池切れになっていない場合(ステップS27;NO)、ステップS26に戻り、ステップS26〜ステップS27を繰り返す。電源がOFFまたは電池切れになった場合(ステップS27;YES)、処理を終了する。
【0057】
なお、ステップS25での判定は、所定の駆動回数である否かの判定に限らず、たとえば所定の時間が経過したか否かの判定でもよい。
【0058】
以上説明したように、本実施の形態の電池駆動装置によれば、装置コストおよび計算コストが低く、電池の温度特性による影響を考慮して、電池で駆動する動作時間を延長させることができる。本発明では、ECのような電池18の残容量を監視する複雑な装置が不要となり、簡単な温度センサを備えればよい。本実施の形態のように、センサノードがあらかじめ温度センサを備えている場合は、該温度センサの計測データを駆動間隔の判断に流用することで、さらに装置コストを抑え小型化することが可能である。駆動間隔算出部16が実行する温度センサ11の計測データから駆動間隔評価関数を用いて駆動間隔を得るという処理は、温度センサ11の計測データから電池18の残容量を予測する処理を行う場合よりも計算コストが低い。
【0059】
また、所定の駆動回数や所定の時間ごとに駆動間隔を算出することで、急激な温度変化が多発しない環境においては、同一または近い結果が得られる計測間隔の判断を省略することができる。これにより、デバイスを駆動するたびに計測間隔の判断を実行する場合に比べて、計算コストを抑えることが可能となり、電池駆動装置の電池寿命をさらに延ばすことができる。
【0060】
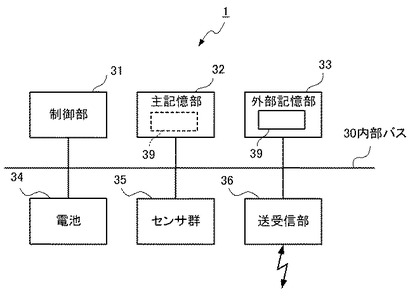
図6は、本発明の実施の形態に係るセンサノードのハードウェア構成の一例を示す図である。センサノード1は、図6に示すように、制御部31、主記憶部32、外部記憶部33、電池34、センサ群35および送受信部36を備える。主記憶部32、外部記憶部33、操作部34、表示部35、電池34、センサ群35および送受信部36はいずれも内部バス30を介して制御部31に接続されている。
【0061】
制御部31はCPU(Central Processing Unit)等から構成され、外部記憶部33に記憶されている制御プログラム39に従って、各処理を実行する。制御部31は、駆動間隔算出部16、駆動部17および送信部19の各処理を実行する。
【0062】
主記憶部32はRAM(Random-Access Memory)等から構成され、外部記憶部33に記憶されている制御プログラム39をロードし、制御部31の作業領域として用いられる。
【0063】
外部記憶部33は、フラッシュメモリ、ハードディスク、DVD−RAM(Digital Versatile Disc Random-Access Memory)、DVD−RW(Digital Versatile Disc ReWritable)等の不揮発性メモリから構成され、電池駆動装置1の処理を制御部31に行わせるためのプログラムをあらかじめ記憶し、また、制御部31の指示に従って、このプログラムが記憶するデータを制御部31に供給し、制御部31から供給されたデータを記憶する。記憶部15は、外部記憶部33に構成される。
【0064】
電池34は、センサ群35に駆動電力を供給する。
【0065】
センサ群35は、図1における温度センサ11、湿度センサ12、照度センサ13および気圧センサ14である。センサ群35は、計測結果を示す計測データを制御部31に送る。制御部31は、これらの計測データを送受信部36を介して外部に送信する。
【0066】
送受信部36は、通信ネットワークに接続する網終端装置または無線通信装置、およびそれらと接続するシリアルインタフェースまたはLAN(Local Area Network)インタフェースから構成されている。送受信部36および制御部31は、送信部19として機能する。なお、外部から駆動間隔評価関数を取得する場合は、送受信部36は、受信した駆動間隔評価関数を制御部31に送る。
【0067】
図1に示す駆動間隔算出部16、駆動部17および送信部19の処理は、制御プログラム39が、制御部31、主記憶部32、外部記憶部33、電池34、センサ群35および送受信部36等を資源として用いて処理することによって実行する。
【0068】
その他、前記のハードウェア構成やフローチャートは一例であり、任意に変更および修正が可能である。
【0069】
制御部31、主記憶部32、外部記憶部33、送受信部36、内部バス30等から構成される電池駆動処理を行う中心となる部分は、専用のシステムによらず、通常のコンピュータシステムを用いて実現可能である。たとえば、前記の動作を実行するためのコンピュータプログラムを、コンピュータが読み取り可能な記録媒体(フレキシブルディスク、CD−ROM、DVD−ROM等)に格納して配布し、当該コンピュータプログラムをコンピュータにインストールすることにより、前記の処理を実行するセンサノードを構成してもよい。また、インターネット等の通信ネットワーク上のサーバ装置が有する記憶装置に当該コンピュータプログラムを格納しておき、通常のコンピュータシステムがダウンロード等することでセンサノードを構成してもよい。
【0070】
また、センサノードの機能を、OS(オペレーティングシステム)とアプリケーションプログラムの分担、またはOSとアプリケーションプログラムとの協働により実現する場合等には、アプリケーションプログラム部分のみを記録媒体や記憶装置に格納してもよい。
【0071】
また、搬送波にコンピュータプログラムを重畳し、通信ネットワークを介して配信することも可能である。たとえば、通信ネットワーク上の掲示板(BBS, Bulletin Board System)に前記コンピュータプログラムを掲示し、通信ネットワークを介して前記コンピュータプログラムを配信してもよい。そして、このコンピュータプログラムを起動し、OSの制御下で、他のアプリケーションプログラムと同様に実行することにより、前記の処理を実行できるように構成してもよい。
【0072】
上記の実施形態の一部又は全部は、以下の請求項のようにも記載され得るが、以下には限られない。
【0073】
(付記1)
少なくとも周辺温度を計測する温度センサを含むデバイスと、
前記デバイスの駆動電力を給電する電池と、
前記電池の温度特性から算出した温度と前記デバイスの駆動間隔との関係を示す駆動間隔評価関数を記憶する記憶手段と、
前記温度センサの計測結果を示す計測データから、前記駆動間隔評価関数を用いて駆動間隔を算出する駆動間隔算出手段と、
前記駆動間隔算出手段が算出した前記駆動間隔で前記デバイスを駆動させる駆動手段と、
を備えることを特徴とする電池駆動装置。
【0074】
(付記2)
前記駆動間隔評価関数は、前記電池の電圧ドロップ幅が小さい温度では駆動間隔が短く、使用する電池の電圧ドロップ幅が大きい温度では駆動間隔が長いことを特徴とする付記1に記載の電池駆動装置。
【0075】
(付記3)
前記駆動間隔算出手段は、所定の駆動回数または所定の時間ごとに前記駆動間隔を算出することを特徴とする付記1または2に記載の電池駆動装置。
【0076】
(付記4)
前記デバイスは、前記電池駆動装置の周囲の状態を計測するセンサであって、
前記センサが前記電池駆動装置の周囲の状態を計測するごとに計測結果を示す計測データを無線で外部に送信する送信手段を備えることを特徴とする付記1ないし3のいずれかに記載の電池駆動装置。
【0077】
(付記5)
少なくとも周辺温度を計測する温度センサを含むデバイスと、前記デバイスの駆動電力を給電する電池と、前記電池の温度特性から算出した温度と前記デバイスの駆動間隔との関係を示す駆動間隔評価関数を記憶する記憶手段とを備える電池駆動装置が実行する電池駆動方法であって、
前記温度センサの計測結果を示す計測データを取得する取得ステップと、
前記温度センサの計測データから、前記駆動間隔評価関数を用いて駆動間隔を算出する駆動間隔算出ステップと、
前記駆動間隔算出ステップで算出した前記駆動間隔で前記デバイスを駆動させる駆動ステップと、
を備えることを特徴とする電池駆動方法。
【0078】
(付記6)
前記駆動間隔評価関数は、前記電池の電圧ドロップ幅が小さい温度では駆動間隔が短く、使用する電池の電圧ドロップ幅が大きい温度では駆動間隔が長いことを特徴とする付記5に記載の電池駆動方法。
【0079】
(付記7)
前記駆動間隔算出ステップでは、所定の駆動回数または所定の時間ごとに前記駆動間隔を算出することを特徴とする付記5または6に記載の電池駆動方法。
【0080】
(付記8)
前記デバイスは、前記電池駆動装置の周囲の状態を計測するセンサであって、
前記センサが前記電池駆動装置の周囲の状態を計測するごとに計測結果を示す計測データを無線で外部に送信する送信ステップを備えることを特徴とする付記5ないし7のいずれかに記載の電池駆動方法。
【0081】
(付記9)
コンピュータに、
デバイスに含まれる温度センサの計測結果を示す計測データを取得する取得ステップと、
前記温度センサの計測データから、前記デバイスの駆動電力を給電する電池の温度特性から算出した温度と前記デバイスの駆動間隔との関係を示す駆動間隔評価関数を用いて駆動間隔を算出する駆動間隔算出ステップと、
前記駆動間隔算出ステップで算出した前記駆動間隔で前記デバイスを駆動させる駆動ステップと、
を実行させることを特徴とするプログラム。
【産業上の利用可能性】
【0082】
本発明は、無線センサシステムにおける各センサノードの温度特性を考慮することで、放電量の低減および長寿命化を実現することが可能であり、また、無線通信システム、特に、各無線ノードにおける省電力化が重要な電子タグシステムやセンサネットワークシステム等に適用可能である。
【0083】
また、本発明の電池駆動装置は、無線通信を行う無線センサシステムのセンサノードに限らずに、乾電池やボタン型電池等で駆動する電池駆動装置に適用可能である。電池駆動であれば、その形態や用途を問わず、さまざまな電池駆動装置に適用可能である。
【符号の説明】
【0084】
1 センサノード
11 温度センサ
12 湿度センサ
13 照度センサ
14 気圧センサ
15 記憶部
16 駆動間隔算出部
17 駆動部
18 電池
19 送信部
31 制御部
32 主記憶部
33 外部記憶部
34 電池
35 センサ群
36 送受信部
39 制御プログラム
【技術分野】
【0001】
本発明は、電池駆動装置、電池駆動方法およびプログラムに関する。
【背景技術】
【0002】
近年、通信機能を有する複数のセンサノードによりネットワークを構築し、該センサノードが個々にまたは連携して計測した情報を収集するセンサネットワークが開発されている。特に、センサノードの通信機能を無線化し、センサノードを設置する際の配線を不要にするワイヤレスセンサネットワークが注目を集めている。
【0003】
ワイヤレスセンサネットワークにおけるセンサノードの電源は、電池(たとえば、乾電池、ボタン電池等)から供給することが多い。こうしたセンサノードを電池駆動センサノードと呼ぶことがある。以下では、特に区別する必要がある場合を除いて、電池駆動センサノードのことを単にセンサノードと記述する。
【0004】
さらに、センサネットワークを構築するためのセンサノードはどこにでも設置できるという要件を満たすために、小型であることが好ましい。
【0005】
ワイヤレスセンサネットワークの代表的な用途に、環境情報収集がある。環境情報収集は、環境センサ(たとえば、温度センサ、湿度センサ、照度センサ等)を搭載したセンサノードを用いてワイヤレスセンサネットワークを構築することにより、センサノード設置場所周辺の環境情報(たとえば、温度、湿度、照度等)を収集するものである。このとき、センサノードは、一定周期で環境情報を計測し、無線基地局に対して環境情報の送信を繰り返すような動作をすることが多い。
【0006】
センサノードは、電池が切れた場合の充電作業や、電池の交換作業等の手間を省くため、一度取り付けた電池により数ヶ月ないし数年間、ときにはそれ以上動作することが望まれる。そのため、センサノードは放電量を抑え、電池の消耗を減らすことが必要となる。すなわち、センサノードの省電力化を図り低電力で動作させることにより、センサノードを長時間に渡って動作させることが必要となる。
【0007】
一般的に、電池は低温環境下や高温環境下では放電開始電圧(起電力)が低下し、電圧ドロップ幅が大きくなる。電圧ドロップとは、放電中に電池内で電圧が降下していくことをいう。電圧ドロップ幅は、単位時間あたりの電圧ドロップの降下幅である。このため、センサノードでは、外気温によっては長時間に渡る動作(たとえば、前述した環境情報収集のような動作)を継続すると、電圧ドロップの影響で動作可能電圧を下回って動作が中断されたり、電池寿命が短くなったりする恐れが生じる。
【0008】
従って、センサノードは、電池の温度特性による影響を考慮して長時間動作することが求められる。
【0009】
特許文献1には、バッテリ残量を監視してハイバネーション状態等のシステムステートを制御する場合に、バッテリを実際に使用することが可能な時間を長くすることで、ユーザの利便性を高める情報処理装置及びバッテリ装置が提示されている。特許文献1の技術は、バッテリ残量を示す情報と、ハイバネーション状態等に遷移させるための遷移条件として、バッテリ残量だけではなくバッテリの環境条件や劣化状態等に基づいて、システムステートの遷移制御を行い、状態遷移に要する電力の余力分をユーザの使用可能な電力として融通することができる。
【0010】
特許文献2には、通信トラヒックの観点から、バッテリの駆動時間をできる限り延長させる無線通信装置等が提示されている。特許文献2の無線通信装置は、バッテリのバッテリ状態を監視し、バッテリ状態に基づいて、チャージリカバリ効果が得られるデータ時間間隔を決定する。そして、そのデータ時間間隔で送信バッファからデータを取り出すように制御する。また、特許文献2の無線通信装置は、バッテリ電圧、充放電履歴、外部気温等のパラメータから、バッテリ残容量を予測する。
【0011】
特許文献3には、端末の処理に必要な機能に応じたバッテリ容量を推測でき、端末使用中の機能停止を防止して端末を安定使用できる携帯情報端末が提案されている。特許文献3の携帯情報端末は、バッテリの電源供給を受けて駆動されるバッテリ駆動対象を備え、各バッテリ駆動対象の動作制御時に検出されたバッテリの充放電回数に基づく放電特性と、この放電特性上の現在のバッテリ電圧に基づき、現在のバッテリ電圧で動作させようとするバッテリ駆動対象が安定駆動不能な場合には、このバッテリ駆動対象の動作を一部または全て規制制御し、バッテリ駆動対象の途中停止や装置全体の途中停止を未然に防止する。
【0012】
特許文献4では、電源として発電機と電池を具備した電子機器において、電池の寿命を延ばすことで電池交換が殆ど不要な電子機器が提案されている。特許文献4の電子機器は、発電機から電力を供給するか電池から電力を供給するかの判定をし、その判定結果に基づいて、センサノードにおける間欠動作の制御を行う。
【0013】
特許文献5には、省エネ性を確保しつつ、全体として快適な環境制御を行う環境制御システムが提示されている。特許文献5の環境制御システムでは、複数の環境制御機器の各々にセンサノードを接続し、センサノードにより測定した環境情報と、当該センサノードの近傍に存在する他センサノードの情報とをサーバに送信する。サーバにおいて、各機器制御信号の合計が所定の範囲となるように、近傍のセンサノード間の機器制御信号の差をできるだけ小さくした機器制御信号を生成する。これにより、環境制御機器全体の出力を所定の範囲に収めると同時に、近傍に存在する環境制御機器間の出力(たとえば、明るさ等)を滑らかに変化させることができるので、全体の消費電力を考慮するとともに、人の快適性に配慮した環境制御を行うことができる。
【0014】
特許文献6には、省電力化のために一定時間間隔で動作状態と休止状態を繰り返す間欠動作を行う複数のセンサノード間の時刻を高精度に同期させるノード時刻同期方法が提示されている。
【0015】
特許文献7には、非常に混雑した通信環境において異常現象が発生した場合に、通信輻輳を防止しながらセンサノードが所定の情報をなるべく早くセンサネットサーバに伝達する通信制御方法が提示されている。
【0016】
特許文献8には、 新品の状態からライフエンド状態に放電特性が変動しても、実質的な電池寿命を大幅に延命させて、電池交換負担を軽減できる携帯型電子装置が提示されている。特許文献8の携帯型電子装置は、放電終止電圧に到達するまで放電電流を一定とするように負荷デバイスに対する負荷電流を制御した状態で、サブCPUが検出された電池の電圧値の変動状態を演算処理して電池の放電特性を識別判定し、該判定した放電特性に応じて電池残量判定基準値を自動変更し、各電池残量判定基準値と検出された電池パックの電圧値とを比較して電池の電池残量を判定する。
【先行技術文献】
【特許文献】
【0017】
【特許文献1】特開2004−334475号公報
【特許文献2】特開2007−295052号公報
【特許文献3】特開2003−140785号公報
【特許文献4】特開2006−204024号公報
【特許文献5】特開2007−249647号公報
【特許文献6】特開2010−016576号公報
【特許文献7】特開2010−020504号公報
【特許文献8】特開平08−126216号公報
【発明の概要】
【発明が解決しようとする課題】
【0018】
しかしながら、特許文献1に記載された技術はバッテリの残量が閾値以下になった場合にハイバーネーション状態に遷移させるだけのものに過ぎない。また、復帰して継続動作をするための手段としてACアダプタからの電力供給を用いるため、電池駆動のセンサノードに対してそのまま適用することはできない。さらに、特許文献1の技術を用いるためには、「EC」(Embedded Controller:組み込みコントローラ)のようなバッテリ装置の残容量を監視する装置が必要であり、装置コストが高くなる。
【0019】
また、特許文献2に記載の技術では、バッテリ装置の温度特性を考慮するためには、気温のパラメータ等からバッテリ装置の残容量を予測する処理を必要とするため、計算コストが高くなるという問題が生じる。
【0020】
特許文献3〜8に記載の技術は、バッテリ装置の温度特性を考慮して、電池で駆動するデバイスの動作時間を延長させるものではない。
【0021】
本発明は、上述の事情に鑑みてなされたもので、装置コストおよび計算コストが低く、電池の温度特性による影響を考慮して、電池で駆動する動作時間を延長させることができる電池駆動装置、電池駆動方法およびプログラムを提供することを目的とする。
【課題を解決するための手段】
【0022】
本発明の第1の観点に係る電池駆動装置は、
少なくとも周辺温度を計測する温度センサを含むデバイスと、
前記デバイスの駆動電力を給電する電池と、
前記電池の温度特性から算出した温度と前記デバイスの駆動間隔との関係を示す駆動間隔評価関数を記憶する記憶手段と、
前記温度センサの計測結果を示す計測データから、前記駆動間隔評価関数を用いて駆動間隔を算出する駆動間隔算出手段と、
前記駆動間隔算出手段が算出した前記駆動間隔で前記デバイスを駆動させる駆動手段と、
を備えることを特徴とする。
【0023】
本発明の第2の観点に係る電池駆動方法は、
少なくとも周辺温度を計測する温度センサを含むデバイスと、前記デバイスの駆動電力を給電する電池と、前記電池の温度特性から算出した温度と前記デバイスの駆動間隔との関係を示す駆動間隔評価関数を記憶する記憶手段とを備える電池駆動装置が実行する電池駆動方法であって、
前記温度センサの計測結果を示す計測データを取得する取得ステップと、
前記温度センサの計測データから、前記駆動間隔評価関数を用いて駆動間隔を算出する駆動間隔算出ステップと、
前記駆動間隔算出ステップで算出した前記駆動間隔で前記デバイスを駆動させる駆動ステップと、
を備えることを特徴とする。
【0024】
本発明の第3の観点に係るプログラムは、コンピュータに、
デバイスに含まれる温度センサの計測結果を示す計測データを取得する取得ステップと、
前記温度センサの計測データから、前記デバイスの駆動電力を給電する電池の温度特性から算出した温度と前記デバイスの駆動間隔との関係を示す駆動間隔評価関数を用いて駆動間隔を算出する駆動間隔算出ステップと、
前記駆動間隔算出ステップで算出した前記駆動間隔で前記デバイスを駆動させる駆動ステップと、
を実行させることを特徴とする。
【発明の効果】
【0025】
本発明によれば、装置コストおよび計算コストが低く、電池の温度特性による影響を考慮して、電池で駆動する動作時間を延長させることができる。
【図面の簡単な説明】
【0026】
【図1】本発明の実施の形態に係るセンサノードの構成例を示すブロック図である。
【図2】実施の形態に係る電池の温度特性の一例を示す図である。
【図3】実施の形態に係る駆動間隔評価関数の一例を示す図である。
【図4】実施の形態に係るセンサノードの動作の一例を示すフローチャートである。
【図5】実施の形態に係るセンサノードの動作の一例を示すフローチャートである。
【図6】実施の形態に係るセンサノードのハードウェア構成の一例を示すブロック図である。
【発明を実施するための形態】
【0027】
以下、本発明の実施の形態について図面を参照しながら詳細に説明する。なお、図中同一または相当部分には同一符号を付す。
【0028】
図1は、本発明の実施の形態に係るセンサノードの構成例を示すブロック図である。本実施の形態おける電池駆動装置として、電池駆動式のセンサノード1を例に挙げて説明する。また、電池駆動装置(センサノード1)が備えるデバイスは、周辺温度を計測する温度センサを含む電池駆動装置の周囲の状態を計測するセンサ群(図中、破線で囲む)とする。
【0029】
センサノード1は、温度センサ11、湿度センサ12、照度センサ13、気圧センサ14、記憶部15、駆動間隔算出部16、駆動部17、電池18および送信部19を備える。
【0030】
温度センサ11は、センサノード1の周辺温度を計測し、計測結果を示す計測データを駆動間隔算出部16および送信部19に送る。温度センサ11の種類は問わず、たとえば、測温抵抗体、熱電対、サーミスタ等を用いることができる。駆動間隔算出部16に計測データを送る温度センサは、送信部19に計測データを送る温度センサとは別の温度センサでもよい。
【0031】
湿度センサ12は、センサノード1の周辺湿度を計測し、計測結果を示す計測データを送信部19に送る。
【0032】
照度センサ13は、センサノード1の周辺照度を計測し、計測結果を示す計測データを送信部19に送る。
【0033】
気圧センサ14は、センサノード1の周辺気圧を計測し、計測結果を示す計測データを送信部19に送る。
【0034】
記憶部15は、電池18の温度特性から算出した温度と駆動間隔の関係を示す駆動間隔評価関数をあらかじめ記憶する。駆動間隔評価関数とは、温度から駆動間隔を算出するための演算規則や係数、定数などである。記憶部15はこれらを示す情報を記憶する。駆動間隔評価関数の詳細は後述する。
【0035】
駆動間隔算出部16は、温度センサ11から受け取った計測データから、記憶部15が記憶する駆動間隔評価関数を用いて、温度センサ11、湿度センサ12、照度センサ13および気圧センサ14の駆動間隔を算出する。駆動間隔は、センサごとに個別に算出してもよいし、共通に算出してもよい。駆動間隔評価関数は、駆動間隔算出部16が外部から取得してもよいし、駆動間隔算出部16があらかじめ電池18の温度特性に基づいて算出しておいてもよい。
【0036】
駆動部17は、駆動間隔算出部16が算出した駆動間隔で、温度センサ11、湿度センサ12、照度センサ13および気圧センサ14を駆動させる。
【0037】
電池18は、温度センサ11、湿度センサ12、照度センサ13および気圧センサ14に駆動電力を供給する。
【0038】
送信部19は、温度センサ11、湿度センサ12、照度センサ13および気圧センサ14から受け取った計測データを外部に送信する。無線基地局と無線で通信する複数のセンサノード1で構成される無線センサシステムである場合には、送信部19は、無線基地局に計測データを送信する。無線基地局は、各センサノード1から受信した計測データ蓄積し、集計したり、分析したり、さらに他のサーバに送信したりする。
【0039】
温度センサ11、湿度センサ12、照度センサ13および気圧センサ14は生成した計測データは記憶部15に記憶させてもよい。この場合、送信部19はなくてもよい。温度センサ11、湿度センサ12、照度センサ13および気圧センサ14は、外部に備えてもよい。その場合、センサノード1は各センサから計測データを取得する取得部を備える。
【0040】
また、電池駆動装置1が備えるデバイスは、温度センサ11、湿度センサ12、照度センサ13および気圧センサ14に限らず、加速度センサやガス濃度センサ、音響レベル等、他のセンサでもよいし、他の装置でもよい。また、温度センサ11のみでもよい。すなわち、電池駆動装置1が備えるデバイスは、少なくとも温度センサ11を含む装置であればよい。
【0041】
図2は、実施の形態に係る電池の温度特性の一例を示す図である。図2に示すような温度特性を持つ電池を使用する場合、40℃の環境では20℃の環境に比べ起電力が低下し電圧ドロップ幅が大きくなる。−20℃の環境ではさらに起電力が低下し電圧ドロップ幅が大きくなる。たとえば、起電力を比較すると、20℃の環境では3.09V、40℃の環境では2.93V、−20℃の環境では2.85Vと、順に小さくなっている。また、たとえば、放電容量が0.6Ah〜0.8Ahの間の電圧ドロップ幅を比較すると、20℃の環境では0.10V、40℃の環境では0.15V、−20℃の環境では0.21Vと、順に大きくなっている。
【0042】
図3は、実施の形態に係る駆動間隔評価関数の一例を示す図である。電池18が図2のような温度特性を持つ場合、たとえば図3に示すような駆動間隔評価関数を用いる。図3の駆動間隔評価関数は、40℃の環境では20℃の環境に比べ起電力の回復時間を多く取るために、駆動間隔を長く設定している。また、−20℃の環境ではさらに多くの起電力回復時間を取るために、駆動間隔をさらに長く設定している。具体的には、温度が20℃の場合の駆動間隔は5秒、温度が40度の場合の駆動間隔は10秒、温度が−20℃の場合の駆動間隔は20秒である。
【0043】
たとえば、記憶部15が図3の駆動間隔評価関数を記憶しているとすると、センサノード1の温度センサ11の計測データが20℃であった場合、駆動間隔算出部16は駆動間隔5秒を算出する。このように電池18の温度特性に基づいて算出した駆動間隔評価関数を用いて各センサの駆動間隔を算出することにより、電圧ドロップの影響で動作可能電圧を下回って動作が中断されたり、電池寿命が短くなったりする可能性を低減させ、センサノード1の動作時間を延長させることができる。
【0044】
図3の例では、駆動間隔評価関数をグラフで表現しているが、実際には、駆動間隔評価関数は、温度と駆動間隔の対応表として記憶されている。たとえば、温度と駆動間隔の対応表では、−50℃〜50℃までの1℃ごとの温度に対応する駆動間隔が設定されている。駆動間隔算出部16は、温度センサ11から受け取った計測データの温度が対応表になかった場合、前後の温度の駆動間隔から近似関数を算出して補間する。このような温度と駆動間隔の対応表は演算規則のひとつである。
【0045】
あるいは、駆動間隔評価関数は、図3に示すような曲線を区間ごとに近似する近似関数としてもよい。この近似関数は、独立変数Xが温度であり、従属変数Yが駆動間隔である。駆動間隔算出部16は、温度センサ11から受け取った計測データの温度をXに代入し、駆動間隔Yを算出する。
【0046】
このように、駆動間隔評価関数は、演算規則、係数、定数などであり、これらは複数であってもよい。電池18に異なる温度特性の電池を用いた場合には、温度特性に合わせて駆動間隔評価関数を定義すればよい。たとえば、異なる温度特性を有する電池を用いる場合、前述の近似関数の係数および定数を変化させて新たな駆動間隔評価関数を定義する。駆動間隔評価関数は、センサノード1が電池18の温度特性から算出してもよいし、外部から取得してもよい。
【0047】
図4は、実施の形態に係るセンサノードの動作の一例を示すフローチャートである。図4の例では、各センサを駆動させるごとに駆動間隔を算出するセンサノード1の動作の例を示す。
【0048】
センサノード1の電源がONになると、まず、駆動部17は、各センサを駆動させる(ステップS11)。駆動間隔算出部16は、温度センサ11からセンサノード1の周辺温度を計測した計測データを受け取る(ステップS12)。駆動間隔算出部16は、記憶部15から駆動間隔評価関数を読み出し、温度センサ11から受け取った計測データから、駆動間隔評価関数を用いて駆動間隔を算出する(ステップS13)。
【0049】
駆動間隔算出部16が算出した駆動間隔を経過した場合(ステップS14;YES)、ステップS11に戻り、ステップS11およびステップS14を繰り返す。駆動間隔算出部16が算出した駆動間隔を経過していない場合(ステップS14;NO)、電源がOFFまたは電池切れになったか否かを判定し(ステップS15)、電源がOFFまたは電池切れになっていない場合(ステップS15;NO)、ステップS14に戻り、ステップS14およびステップS15を繰り返す。電源がOFFまたは電池切れになった場合(ステップS15;YES)、処理を終了する。
【0050】
ステップS14において、ステップS12およびステップS13の実行にかかった時間を考慮してもよい。たとえば、ステップS12およびステップS13の実行に1秒かかっていた場合には、駆動間隔算出部16が算出した駆動間隔−1秒を待機期間とし、ステップS14では待機時間が経過したか否かを判定する。
【0051】
図5は、実施の形態に係るセンサノードの動作の一例を示すフローチャートである。図5の例では、所定の駆動回数ごとに駆動間隔を算出するセンサノード1の動作の例を示す。
【0052】
センサノード1の電源がONになると、まず、駆動部17は、各センサを駆動させる(ステップS21)。これが初回の駆動であった場合(ステップS22;YES)、駆動間隔算出部16は、温度センサ11からセンサノード1の周辺温度を計測した計測データを受け取る(ステップS23)。駆動間隔算出部16は、記憶部15から駆動間隔評価関数を読み出し、温度センサ11から受け取った計測データから、駆動間隔評価関数を用いて駆動間隔を算出する(ステップS24)。
【0053】
駆動間隔算出部16が算出した駆動間隔を経過していない場合(ステップS26;NO)、電源がOFFまたは電池切れになったか否かを判定する(ステップS27)。電源がOFFまたは電池切れになっていない場合(ステップS27;NO)、ステップS26に戻り、ステップS26〜ステップS27を繰り返す。電源がOFFまたは電池切れになった場合(ステップS27;YES)、処理を終了する。
【0054】
一方、駆動間隔算出部16が算出した駆動間隔を経過した場合(ステップS26;YES)、ステップS21に戻り、駆動部17は、各センサを駆動させる。これが初回の駆動でなかった場合(ステップS22:NO)、所定の駆動回数(たとえば、5の倍数の回数)であるか否かを判定する(ステップS25)。
【0055】
所定の駆動回数でない場合(ステップS25;NO)、ステップS26を実行する。所定の駆動回数である場合(ステップS25;YES)、駆動間隔算出部16は、温度センサ11からセンサノード1の周辺温度を計測した計測データを受け取る(ステップS23)。駆動間隔算出部16は、記憶部15から駆動間隔評価関数を読み出し、温度センサ11から受け取った計測データから、駆動間隔評価関数を用いて駆動間隔を算出し(ステップS24)、ステップS26を実行する。
【0056】
駆動間隔算出部16が算出した駆動間隔を経過した場合(ステップS26;YES)、ステップS21に戻り、ステップS21〜ステップS26を繰り返す。駆動間隔算出部16が算出した駆動間隔を経過していない場合(ステップS26;NO)、電源がOFFまたは電池切れになったか否かを判定する(ステップS27)。電源がOFFまたは電池切れになっていない場合(ステップS27;NO)、ステップS26に戻り、ステップS26〜ステップS27を繰り返す。電源がOFFまたは電池切れになった場合(ステップS27;YES)、処理を終了する。
【0057】
なお、ステップS25での判定は、所定の駆動回数である否かの判定に限らず、たとえば所定の時間が経過したか否かの判定でもよい。
【0058】
以上説明したように、本実施の形態の電池駆動装置によれば、装置コストおよび計算コストが低く、電池の温度特性による影響を考慮して、電池で駆動する動作時間を延長させることができる。本発明では、ECのような電池18の残容量を監視する複雑な装置が不要となり、簡単な温度センサを備えればよい。本実施の形態のように、センサノードがあらかじめ温度センサを備えている場合は、該温度センサの計測データを駆動間隔の判断に流用することで、さらに装置コストを抑え小型化することが可能である。駆動間隔算出部16が実行する温度センサ11の計測データから駆動間隔評価関数を用いて駆動間隔を得るという処理は、温度センサ11の計測データから電池18の残容量を予測する処理を行う場合よりも計算コストが低い。
【0059】
また、所定の駆動回数や所定の時間ごとに駆動間隔を算出することで、急激な温度変化が多発しない環境においては、同一または近い結果が得られる計測間隔の判断を省略することができる。これにより、デバイスを駆動するたびに計測間隔の判断を実行する場合に比べて、計算コストを抑えることが可能となり、電池駆動装置の電池寿命をさらに延ばすことができる。
【0060】
図6は、本発明の実施の形態に係るセンサノードのハードウェア構成の一例を示す図である。センサノード1は、図6に示すように、制御部31、主記憶部32、外部記憶部33、電池34、センサ群35および送受信部36を備える。主記憶部32、外部記憶部33、操作部34、表示部35、電池34、センサ群35および送受信部36はいずれも内部バス30を介して制御部31に接続されている。
【0061】
制御部31はCPU(Central Processing Unit)等から構成され、外部記憶部33に記憶されている制御プログラム39に従って、各処理を実行する。制御部31は、駆動間隔算出部16、駆動部17および送信部19の各処理を実行する。
【0062】
主記憶部32はRAM(Random-Access Memory)等から構成され、外部記憶部33に記憶されている制御プログラム39をロードし、制御部31の作業領域として用いられる。
【0063】
外部記憶部33は、フラッシュメモリ、ハードディスク、DVD−RAM(Digital Versatile Disc Random-Access Memory)、DVD−RW(Digital Versatile Disc ReWritable)等の不揮発性メモリから構成され、電池駆動装置1の処理を制御部31に行わせるためのプログラムをあらかじめ記憶し、また、制御部31の指示に従って、このプログラムが記憶するデータを制御部31に供給し、制御部31から供給されたデータを記憶する。記憶部15は、外部記憶部33に構成される。
【0064】
電池34は、センサ群35に駆動電力を供給する。
【0065】
センサ群35は、図1における温度センサ11、湿度センサ12、照度センサ13および気圧センサ14である。センサ群35は、計測結果を示す計測データを制御部31に送る。制御部31は、これらの計測データを送受信部36を介して外部に送信する。
【0066】
送受信部36は、通信ネットワークに接続する網終端装置または無線通信装置、およびそれらと接続するシリアルインタフェースまたはLAN(Local Area Network)インタフェースから構成されている。送受信部36および制御部31は、送信部19として機能する。なお、外部から駆動間隔評価関数を取得する場合は、送受信部36は、受信した駆動間隔評価関数を制御部31に送る。
【0067】
図1に示す駆動間隔算出部16、駆動部17および送信部19の処理は、制御プログラム39が、制御部31、主記憶部32、外部記憶部33、電池34、センサ群35および送受信部36等を資源として用いて処理することによって実行する。
【0068】
その他、前記のハードウェア構成やフローチャートは一例であり、任意に変更および修正が可能である。
【0069】
制御部31、主記憶部32、外部記憶部33、送受信部36、内部バス30等から構成される電池駆動処理を行う中心となる部分は、専用のシステムによらず、通常のコンピュータシステムを用いて実現可能である。たとえば、前記の動作を実行するためのコンピュータプログラムを、コンピュータが読み取り可能な記録媒体(フレキシブルディスク、CD−ROM、DVD−ROM等)に格納して配布し、当該コンピュータプログラムをコンピュータにインストールすることにより、前記の処理を実行するセンサノードを構成してもよい。また、インターネット等の通信ネットワーク上のサーバ装置が有する記憶装置に当該コンピュータプログラムを格納しておき、通常のコンピュータシステムがダウンロード等することでセンサノードを構成してもよい。
【0070】
また、センサノードの機能を、OS(オペレーティングシステム)とアプリケーションプログラムの分担、またはOSとアプリケーションプログラムとの協働により実現する場合等には、アプリケーションプログラム部分のみを記録媒体や記憶装置に格納してもよい。
【0071】
また、搬送波にコンピュータプログラムを重畳し、通信ネットワークを介して配信することも可能である。たとえば、通信ネットワーク上の掲示板(BBS, Bulletin Board System)に前記コンピュータプログラムを掲示し、通信ネットワークを介して前記コンピュータプログラムを配信してもよい。そして、このコンピュータプログラムを起動し、OSの制御下で、他のアプリケーションプログラムと同様に実行することにより、前記の処理を実行できるように構成してもよい。
【0072】
上記の実施形態の一部又は全部は、以下の請求項のようにも記載され得るが、以下には限られない。
【0073】
(付記1)
少なくとも周辺温度を計測する温度センサを含むデバイスと、
前記デバイスの駆動電力を給電する電池と、
前記電池の温度特性から算出した温度と前記デバイスの駆動間隔との関係を示す駆動間隔評価関数を記憶する記憶手段と、
前記温度センサの計測結果を示す計測データから、前記駆動間隔評価関数を用いて駆動間隔を算出する駆動間隔算出手段と、
前記駆動間隔算出手段が算出した前記駆動間隔で前記デバイスを駆動させる駆動手段と、
を備えることを特徴とする電池駆動装置。
【0074】
(付記2)
前記駆動間隔評価関数は、前記電池の電圧ドロップ幅が小さい温度では駆動間隔が短く、使用する電池の電圧ドロップ幅が大きい温度では駆動間隔が長いことを特徴とする付記1に記載の電池駆動装置。
【0075】
(付記3)
前記駆動間隔算出手段は、所定の駆動回数または所定の時間ごとに前記駆動間隔を算出することを特徴とする付記1または2に記載の電池駆動装置。
【0076】
(付記4)
前記デバイスは、前記電池駆動装置の周囲の状態を計測するセンサであって、
前記センサが前記電池駆動装置の周囲の状態を計測するごとに計測結果を示す計測データを無線で外部に送信する送信手段を備えることを特徴とする付記1ないし3のいずれかに記載の電池駆動装置。
【0077】
(付記5)
少なくとも周辺温度を計測する温度センサを含むデバイスと、前記デバイスの駆動電力を給電する電池と、前記電池の温度特性から算出した温度と前記デバイスの駆動間隔との関係を示す駆動間隔評価関数を記憶する記憶手段とを備える電池駆動装置が実行する電池駆動方法であって、
前記温度センサの計測結果を示す計測データを取得する取得ステップと、
前記温度センサの計測データから、前記駆動間隔評価関数を用いて駆動間隔を算出する駆動間隔算出ステップと、
前記駆動間隔算出ステップで算出した前記駆動間隔で前記デバイスを駆動させる駆動ステップと、
を備えることを特徴とする電池駆動方法。
【0078】
(付記6)
前記駆動間隔評価関数は、前記電池の電圧ドロップ幅が小さい温度では駆動間隔が短く、使用する電池の電圧ドロップ幅が大きい温度では駆動間隔が長いことを特徴とする付記5に記載の電池駆動方法。
【0079】
(付記7)
前記駆動間隔算出ステップでは、所定の駆動回数または所定の時間ごとに前記駆動間隔を算出することを特徴とする付記5または6に記載の電池駆動方法。
【0080】
(付記8)
前記デバイスは、前記電池駆動装置の周囲の状態を計測するセンサであって、
前記センサが前記電池駆動装置の周囲の状態を計測するごとに計測結果を示す計測データを無線で外部に送信する送信ステップを備えることを特徴とする付記5ないし7のいずれかに記載の電池駆動方法。
【0081】
(付記9)
コンピュータに、
デバイスに含まれる温度センサの計測結果を示す計測データを取得する取得ステップと、
前記温度センサの計測データから、前記デバイスの駆動電力を給電する電池の温度特性から算出した温度と前記デバイスの駆動間隔との関係を示す駆動間隔評価関数を用いて駆動間隔を算出する駆動間隔算出ステップと、
前記駆動間隔算出ステップで算出した前記駆動間隔で前記デバイスを駆動させる駆動ステップと、
を実行させることを特徴とするプログラム。
【産業上の利用可能性】
【0082】
本発明は、無線センサシステムにおける各センサノードの温度特性を考慮することで、放電量の低減および長寿命化を実現することが可能であり、また、無線通信システム、特に、各無線ノードにおける省電力化が重要な電子タグシステムやセンサネットワークシステム等に適用可能である。
【0083】
また、本発明の電池駆動装置は、無線通信を行う無線センサシステムのセンサノードに限らずに、乾電池やボタン型電池等で駆動する電池駆動装置に適用可能である。電池駆動であれば、その形態や用途を問わず、さまざまな電池駆動装置に適用可能である。
【符号の説明】
【0084】
1 センサノード
11 温度センサ
12 湿度センサ
13 照度センサ
14 気圧センサ
15 記憶部
16 駆動間隔算出部
17 駆動部
18 電池
19 送信部
31 制御部
32 主記憶部
33 外部記憶部
34 電池
35 センサ群
36 送受信部
39 制御プログラム
【特許請求の範囲】
【請求項1】
少なくとも周辺温度を計測する温度センサを含むデバイスと、
前記デバイスの駆動電力を給電する電池と、
前記電池の温度特性から算出した温度と前記デバイスの駆動間隔との関係を示す駆動間隔評価関数を記憶する記憶手段と、
前記温度センサの計測結果を示す計測データから、前記駆動間隔評価関数を用いて駆動間隔を算出する駆動間隔算出手段と、
前記駆動間隔算出手段が算出した前記駆動間隔で前記デバイスを駆動させる駆動手段と、
を備えることを特徴とする電池駆動装置。
【請求項2】
前記駆動間隔評価関数は、前記電池の電圧ドロップ幅が小さい温度では駆動間隔が短く、使用する電池の電圧ドロップ幅が大きい温度では駆動間隔が長いことを特徴とする請求項1に記載の電池駆動装置。
【請求項3】
前記駆動間隔算出手段は、所定の駆動回数または所定の時間ごとに前記駆動間隔を算出することを特徴とする請求項1または2に記載の電池駆動装置。
【請求項4】
前記デバイスは、前記電池駆動装置の周囲の状態を計測するセンサであって、
前記センサが前記電池駆動装置の周囲の状態を計測するごとに計測結果を示す計測データを無線で外部に送信する送信手段を備えることを特徴とする請求項1ないし3のいずれか1項に記載の電池駆動装置。
【請求項5】
少なくとも周辺温度を計測する温度センサを含むデバイスと、前記デバイスの駆動電力を給電する電池と、前記電池の温度特性から算出した温度と前記デバイスの駆動間隔との関係を示す駆動間隔評価関数を記憶する記憶手段とを備える電池駆動装置が実行する電池駆動方法であって、
前記温度センサの計測結果を示す計測データを取得する取得ステップと、
前記温度センサの計測データから、前記駆動間隔評価関数を用いて駆動間隔を算出する駆動間隔算出ステップと、
前記駆動間隔算出ステップで算出した前記駆動間隔で前記デバイスを駆動させる駆動ステップと、
を備えることを特徴とする電池駆動方法。
【請求項6】
前記駆動間隔評価関数は、前記電池の電圧ドロップ幅が小さい温度では駆動間隔が短く、使用する電池の電圧ドロップ幅が大きい温度では駆動間隔が長いことを特徴とする請求項5に記載の電池駆動方法。
【請求項7】
前記駆動間隔算出ステップでは、所定の駆動回数または所定の時間ごとに前記駆動間隔を算出することを特徴とする請求項5または6に記載の電池駆動方法。
【請求項8】
前記デバイスは、前記電池駆動装置の周囲の状態を計測するセンサであって、
前記センサが前記電池駆動装置の周囲の状態を計測するごとに計測結果を示す計測データを無線で外部に送信する送信ステップを備えることを特徴とする請求項5ないし7のいずれか1項に記載の電池駆動方法。
【請求項9】
コンピュータに、
デバイスに含まれる温度センサの計測結果を示す計測データを取得する取得ステップと、
前記温度センサの計測データから、前記デバイスの駆動電力を給電する電池の温度特性から算出した温度と前記デバイスの駆動間隔との関係を示す駆動間隔評価関数を用いて駆動間隔を算出する駆動間隔算出ステップと、
前記駆動間隔算出ステップで算出した前記駆動間隔で前記デバイスを駆動させる駆動ステップと、
を実行させることを特徴とするプログラム。
【請求項1】
少なくとも周辺温度を計測する温度センサを含むデバイスと、
前記デバイスの駆動電力を給電する電池と、
前記電池の温度特性から算出した温度と前記デバイスの駆動間隔との関係を示す駆動間隔評価関数を記憶する記憶手段と、
前記温度センサの計測結果を示す計測データから、前記駆動間隔評価関数を用いて駆動間隔を算出する駆動間隔算出手段と、
前記駆動間隔算出手段が算出した前記駆動間隔で前記デバイスを駆動させる駆動手段と、
を備えることを特徴とする電池駆動装置。
【請求項2】
前記駆動間隔評価関数は、前記電池の電圧ドロップ幅が小さい温度では駆動間隔が短く、使用する電池の電圧ドロップ幅が大きい温度では駆動間隔が長いことを特徴とする請求項1に記載の電池駆動装置。
【請求項3】
前記駆動間隔算出手段は、所定の駆動回数または所定の時間ごとに前記駆動間隔を算出することを特徴とする請求項1または2に記載の電池駆動装置。
【請求項4】
前記デバイスは、前記電池駆動装置の周囲の状態を計測するセンサであって、
前記センサが前記電池駆動装置の周囲の状態を計測するごとに計測結果を示す計測データを無線で外部に送信する送信手段を備えることを特徴とする請求項1ないし3のいずれか1項に記載の電池駆動装置。
【請求項5】
少なくとも周辺温度を計測する温度センサを含むデバイスと、前記デバイスの駆動電力を給電する電池と、前記電池の温度特性から算出した温度と前記デバイスの駆動間隔との関係を示す駆動間隔評価関数を記憶する記憶手段とを備える電池駆動装置が実行する電池駆動方法であって、
前記温度センサの計測結果を示す計測データを取得する取得ステップと、
前記温度センサの計測データから、前記駆動間隔評価関数を用いて駆動間隔を算出する駆動間隔算出ステップと、
前記駆動間隔算出ステップで算出した前記駆動間隔で前記デバイスを駆動させる駆動ステップと、
を備えることを特徴とする電池駆動方法。
【請求項6】
前記駆動間隔評価関数は、前記電池の電圧ドロップ幅が小さい温度では駆動間隔が短く、使用する電池の電圧ドロップ幅が大きい温度では駆動間隔が長いことを特徴とする請求項5に記載の電池駆動方法。
【請求項7】
前記駆動間隔算出ステップでは、所定の駆動回数または所定の時間ごとに前記駆動間隔を算出することを特徴とする請求項5または6に記載の電池駆動方法。
【請求項8】
前記デバイスは、前記電池駆動装置の周囲の状態を計測するセンサであって、
前記センサが前記電池駆動装置の周囲の状態を計測するごとに計測結果を示す計測データを無線で外部に送信する送信ステップを備えることを特徴とする請求項5ないし7のいずれか1項に記載の電池駆動方法。
【請求項9】
コンピュータに、
デバイスに含まれる温度センサの計測結果を示す計測データを取得する取得ステップと、
前記温度センサの計測データから、前記デバイスの駆動電力を給電する電池の温度特性から算出した温度と前記デバイスの駆動間隔との関係を示す駆動間隔評価関数を用いて駆動間隔を算出する駆動間隔算出ステップと、
前記駆動間隔算出ステップで算出した前記駆動間隔で前記デバイスを駆動させる駆動ステップと、
を実行させることを特徴とするプログラム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2013−27164(P2013−27164A)
【公開日】平成25年2月4日(2013.2.4)
【国際特許分類】
【出願番号】特願2011−160087(P2011−160087)
【出願日】平成23年7月21日(2011.7.21)
【国等の委託研究の成果に係る記載事項】(出願人による申告)平成22年度、独立行政法人新エネルギー・産業技術総合開発機構、エネルギー有効利用基盤技術先導研究開発、インテリジェントタップを用いた簡易型HEMSの研究開発に係る委託事業、産業技術力強化法第19条の適用を受ける特許出願
【出願人】(390001395)NECシステムテクノロジー株式会社 (438)
【Fターム(参考)】
【公開日】平成25年2月4日(2013.2.4)
【国際特許分類】
【出願日】平成23年7月21日(2011.7.21)
【国等の委託研究の成果に係る記載事項】(出願人による申告)平成22年度、独立行政法人新エネルギー・産業技術総合開発機構、エネルギー有効利用基盤技術先導研究開発、インテリジェントタップを用いた簡易型HEMSの研究開発に係る委託事業、産業技術力強化法第19条の適用を受ける特許出願
【出願人】(390001395)NECシステムテクノロジー株式会社 (438)
【Fターム(参考)】
[ Back to top ]