
電波受信装置及び到来方向測定方法
【課題】レーダ波の到来方向を、精度良く、短時間で求めることができ、かつ小さなハードウェア規模を実現することが可能な電波受信装置及び到来方向測定方法を提供する。
【解決手段】まず、アンテナ11−2,11−3からの受信波に基づいて、粗測角処理器153で振幅モノパルス方式を利用して、レーダ波の到来方向を測定する。その後、アンテナ11−1,11−4からの受信波に基づいて、精測角処理器154でインターフェロメータ方式を利用すると共に、粗測角の結果を参照して、レーダ波の到来方向を測定する。
【解決手段】まず、アンテナ11−2,11−3からの受信波に基づいて、粗測角処理器153で振幅モノパルス方式を利用して、レーダ波の到来方向を測定する。その後、アンテナ11−1,11−4からの受信波に基づいて、精測角処理器154でインターフェロメータ方式を利用すると共に、粗測角の結果を参照して、レーダ波の到来方向を測定する。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、到来するレーダ波を複数個のアンテナで受信し、そのレーダ波の到来方向を測定する電波受信装置及び到来方向測定方法に関する。
【背景技術】
【0002】
一般的に、レーダ波の発信源の方向を求める場合、一対のアンテナにより、振幅モノパルス方式又はインターフェロメータ方式を用いてレーダ波の到来方向を測定するようにしている。ここで、インターフェロメータ方式は、レーダ波の位相情報に基づいて到来方向を測定するため、レーダ波の振幅情報に基づいて到来方向を測定する振幅モノパルス方式よりも高精度であることが知られている。
【0003】
ところで、飛しょう体に搭載する電波受信装置では、飛しょう体前方に設置した一対の受信用アンテナでレーダ波を受信し、このレーダ波に基づいて振幅モノパルス方式又はインターフェロメータ方式を利用することにより、レーダ波の到来方向を測定する。
【0004】
しかしながら、飛しょう体ではレドームが尖った形状となっているため、レーダ波の到来方向の変化による位相の乱れが大きくなってしまう。そのため、インターフェロメータ方式を用いた測定では、正確な方向を測定することができない。
【0005】
一方、振幅モノパルス方式では、インターフェロメータ方式と比べて測角精度が低いため、飛しょう体の飛しょうに求められる精度が得られない。そこで、特許文献1のように、アンテナの設置数を増やし、複数のアンテナの組み合わせの最適解を求めることで、測角精度を上げることが可能である。しかしながら、飛しょう体では、小型化の観点から簡素な構造をとる必要がある。そのため、特許文献1の方法では、ハードウェア規模が大きくなり飛しょう体における電波受信装置に適さない。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開平8−5734号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
以上のように、飛しょう体に搭載する電波受信装置においては、レドームが尖った形状をしているため、インターフェロメータ方式を利用しての測角が正確に行えず、振幅モノパルス方式を利用した測角では、飛しょう体の飛しょうに必要な精度が得られなかった。
【0008】
この発明は上記事情によりなされたもので、その目的は、レーダ波の到来方向を、精度良く、短時間で求めることができ、かつ小さなハードウェア規模を実現することが可能な電波受信装置及び到来方向測定方法を提供することにある。
【課題を解決するための手段】
【0009】
上記目的を達成するため、本発明に係る電波受信装置は、予め設定された角度を持って配置され、レーダ波を受信する第1のアンテナ対と、予め設定された間隔を隔てて配列され、前記レーダ波を受信する第2のアンテナ対と、前記第1のアンテナ対により受信された第1の受信波、及び、第2のアンテナ対により受信された第2の受信波のうちいずれか一方の受信波を選択するアンテナ選択器と、前記アンテナ選択器で選択された受信波に対して受信処理を施す受信処理部と、前記受信処理部からの信号に基づいて振幅モノパルス方式を利用し、前記レーダ波の到来方向の粗測角を行った後、前記受信処理部からの信号に基づいてインターフェロメータ方式を利用すると共に、前記粗測角結果を参照して前記到来方向の精測角を行う信号処理部と、前記アンテナ選択器に、前記第1の受信波を選択させ、前記信号処理部に、前記第1の受信波による信号に基づいて前記粗測角を行わせる第1の制御と、前記アンテナ選択器に、第2の受信波を選択させ、前記信号処理部に、前記第2の受信波による信号に基づいて前記精測角を行わせる第2の制御とを行う制御器とを具備する。
【0010】
また、本発明に係る到来方向測定方法は、予め設定された角度を持って配置された第1のアンテナ対と、予め設定された間隔を隔てて配列された第2のアンテナ対とでレーダ波を受信し、前記第1のアンテナ対により受信された第1の受信波と、前記第2のアンテナ対により受信された第2の受信波とのうち、前記第1の受信波を選択し、前記第1の受信波に対して受信処理を施し、前記受信処理が施された信号に基づき、振幅モノパルス方式を利用して前記レーダ波の到来方向の粗測角を行い、前記第1の受信波と、前記第2の受信波とのうち、前記第2の受信波を選択し、前記第2の受信波に対して受信処理を施し、前記受信処理が施された信号に基づき、インターフェロメータ方式を利用すると共に、前記粗測角結果を参照して前記レーダ波の到来方向の精測角を行うことを特徴とする。
【0011】
上記構成による電波受信装置及び到来方向測定方法では、まず、位相変化の影響のない振幅モノパルス方式を利用してレーダ波の到来方向を測定する。その後に、高精度の測角が可能なインターフェロメータ方式を利用し、粗測角の結果を参照して、一意にレーダ波の到来方向を特定するようにしている。これにより、レドームの影響が比較的大きい位相情報の誤差を抑え、レーダ波の到来方向を精度良く、一意に求めることが可能となる。
【発明の効果】
【0012】
この発明によれば、レーダ波の到来方向を、精度良く、短時間で求めることができ、かつ小さなハードウェア規模を実現することが可能な電波受信装置を提供することができる。
【図面の簡単な説明】
【0013】
【図1】本発明の一実施形態に係る電波受信装置の機能構成を示すブロック図である。
【図2】図1のアンテナを飛しょう体の先端方向から見た場合の図である。
【図3】図1のアンテナを飛しょう体の側面方向から見た場合の図である。
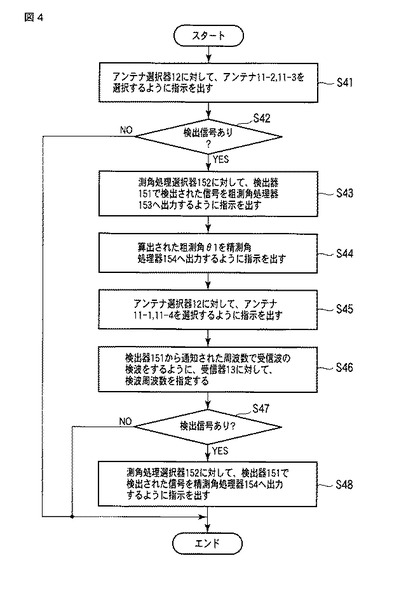
【図4】図1の制御器が到来角の測定をする際の処理動作を示すフローチャートである。
【図5】図1のアンテナの配列例を示す図である。
【図6】図1のアンテナの配列例を示す図である。
【図7】図1のアンテナの配列例を示す図である。
【発明を実施するための形態】
【0014】
以下、図面を参照しながら本発明に係る電波受信装置の実施の形態について詳細に説明する。
【0015】
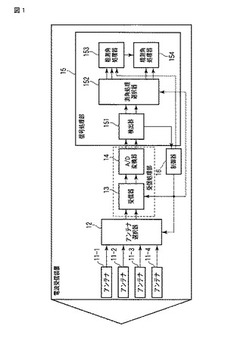
図1は、本発明の一実施形態に係る電波受信装置の機能構成を示すブロック図である。図1における電波受信装置は、アンテナ11−1〜11−4、アンテナ選択器12、受信処理部、信号処理部15及び制御器16を具備する。ここで、受信処理部は、受信器13及びアナログ−デジタル変換器(A/D変換器)14を備える。
【0016】
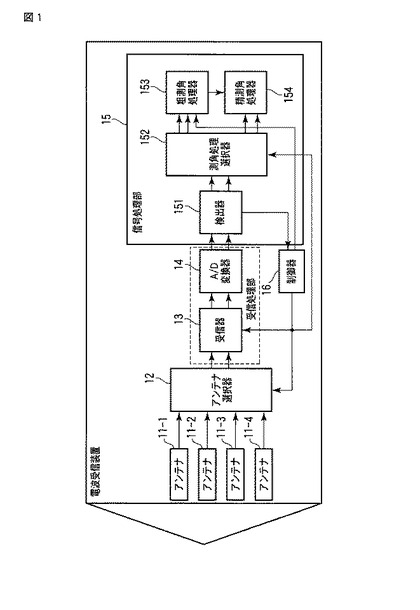
アンテナ11−1〜11−4は、他のレーダからのレーダ波を受信する。図2は、図1に示されるアンテナ11−1〜11−4を飛しょう体の先端方向から見た場合の模式図である。アンテナ11−1〜11−4は、水平方向に一列に配列される。
【0017】
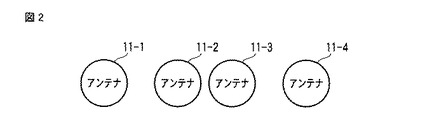
また、図3は、図1に示されるアンテナ11−1〜11−4を飛しょう体の上面方向から見た場合の模式図である。アンテナ11−1,11−4は、同一方向を向くように配置される。一方、アンテナ11−2,11−3は、物体からの反射波を検出できるそれぞれの範囲が重なるように、所定の角度だけやや外側を向いて配置される。
【0018】
アンテナ選択器12は、アンテナ11−1〜11−4のうち、アンテナ11−1,11−4のアンテナ対又はアンテナ11−2,11−3のアンテナ対のうちいずれか一方のアンテナ対を制御器13からの指示により選択する。これにより、アンテナ選択器12は、アンテナ11−1,11−4からの受信波、又は、アンテナ11−2,11−3からの受信波のいずれか一方を選択して受信器13へ出力する。
【0019】
受信器13は、アンテナ11−2,11−3からの受信波を受け取った場合は、予め設定された範囲の周波数帯域で周波数をスイープさせて、受信波を検波する。また、アンテナ11−1,11−4からの受信波を受け取った場合は、制御器16から指定された周波数で受信波を検波する。受信器13で検波された受信波は、受信アナログ信号としてアナログ−デジタル変換器14でデジタル信号に変換され、信号処理部15へ出力される。
【0020】
信号処理部15は、受信アナログ信号に基づいてレーダ波の到来方向を測定する。信号処理部15は、検出器151、測角処理選択器152、粗測角処理器153及び精測角処理器154を備える。
【0021】
検出器151は、アナログ−デジタル変換器14からのデジタル信号の振幅値が予め設定された閾値を超えるか否かを判断する。検出器151は、閾値を超えた場合、受信波を検出したと判断し、制御器16に対して、受信波を検出した旨を示す検出信号を出力する。また、検出器は、アンテナ11−2,11−3からの受信波のデジタル信号が閾値を超えた場合、その超えたときの周波数を制御器16へ通知する。
【0022】
測角処理選択器152は、検出器151からのデジタル信号を、制御器16からの指示に基づいて、粗測角処理器153又は精測角処理器154のいずれかへ出力する。
【0023】
粗測角処理器153は、振幅モノパルス方式を利用し、アンテナ11−2,11−3からの受信波のデジタル信号に基づいて、レーダ波の到来角度を求める。粗測角処理器153は、アンテナ11−2からの受信波のデジタル信号の振幅をA2、アンテナ11−3からの受信波のデジタル信号の振幅をA3とし、和信号Σ及び差信号Δを算出する。
【0024】
Σ=A2+A3
Δ=A2−A3
粗測角処理器153は、誤差角係数をKとし、粗測角θ1を算出する。粗測角θ1は、
θ1=K・Δ/Σ
である。ここで、誤差角係数Kは、制御器16からの指示により決定する。
【0025】
精測角処理器154は、インターフェロメータ方式を利用し、アンテナ11−1,11−4からの受信波のデジタル信号に基づいて、レーダ波の到来角度を求める。精測角処理器154は、アンテナ11−1とアンテナ11−4との素子間隔をD[m]、受信波の周波数をF[Hz]、受信波の速度をC[m/s]、アンテナ11−1からの受信波のデジタル信号の位相値をφ1、アンテナ11−4からの受信波のデジタル信号の位相値をφ4とすると、精測角θ2は、
【数1】

【0026】
と算出される。ここで、精測角θ2は、サイン関数の周期性から複数の角度値を取りうる。精測角処理器154は、粗測角処理器153で算出された粗測角θ1を参照して、一意の精測角θ2を求める。すなわち、精測角処理器154は、粗測角θ1に最も近い精測角θ2をレーダ波の到来方向であると特定する。
【0027】
制御器16は、アンテナ選択器12、受信器13及び測角処理選択器152に対して制御を行う。
【0028】
次に、上記構成における動作を説明する。図4は、本発明に係る制御器16が到来角の測定をする際の処理動作を示すフローチャートである。
【0029】
まず、制御器16は、アンテナ選択器12に対して、アンテナ11−2,11−3を選択するように指示を出す(ステップS41)。制御器16は、検出器151からの検出信号があるか否かを判断する(ステップS42)。また、制御器16は、検出器151から、検出信号と共に、受信波が検出された周波数の通知を受ける。制御器16は、検出信号が無い場合(ステップS42のNo)、処理を終了する。
【0030】
制御器16は、検出信号があった場合(ステップS42のYes)、測角処理選択器152に対して、検出器151で検出された信号を粗測角処理器153へ出力するように指示を出す(ステップS43)。これにより、粗測角処理器153は、振幅モノパルス方式を利用し、アンテナ11−2,11−3からの受信波のデジタル信号に基づいて、粗測角θ1を算出する。制御器16は、算出された粗測角θ1を精測角処理器154へ出力するように指示を出す(ステップS44)。
【0031】
続いて、制御器16は、アンテナ選択器12に対して、アンテナ11−1,11−4を選択するように指示を出す(ステップS45)。制御器16は、検出器151から通知された周波数で受信波の検波をするように、受信器13に対して、検波周波数を指定する(ステップS46)。
【0032】
制御器16は、検出器151からの検出信号があるか否かを判断する(ステップS47)。制御器16は、検出信号が無い場合(ステップS47のNo)、処理を終了する。
【0033】
制御器16は、検出信号があった場合(ステップS47のYes)、測角処理選択器152に対して、検出器151で検出された信号を精測角処理器154へ出力するように指示を出す(ステップS48)。これにより、精測角処理器154は、インターフェロメータ方式を利用し、アンテナ11−1,11−4からの受信波のデジタル信号と、粗測角θ1に基づいて精測角θ2を算出する。
【0034】
以上のように、上記一実施形態では、電波受信装置は、まず振幅モノパルス方式を利用して粗測角θ1を算出する。振幅モノパルス方式を用いた測角は、測角精度は低いが、受信波の振幅情報に基づいて測角を行うため、レドームの影響が比較的少ない。このため、受信波の到来方向を概略的に求めることが可能となる。そして、受信電波装置は、粗測角θ1を参照し、インターフェロメータ方式を利用して精測角θ2を算出するようにしている。インターフェロメータ方式では、高精度に到来角を測定する場合、サイン関数の周期性から複数の角度値を取りうる。本実施形態では、振幅モノパルス方式を利用して粗測角θ1を予め算出しているため、精測角θ2を一意に算出することが可能となる。すなわち、本実施形態に係る電波受信装置は、レドームの影響が比較的大きい位相情報の誤差を抑え、レーダ波の到来方向を精度良く、一意に求めることが可能である。
【0035】
また、上記一実施形態では、振幅モノパルス方式を利用した粗測角θ1の算出の際に得られた周波数情報を、インターフェロメータ方式を利用した精測角θ2の算出に利用するようにしている。これにより、レーダ波が様々な周波数を取り得る場合であっても、検波周波数を予想しておく必要はない。つまり、レーダ波が様々な周波数を取り得る場合であっても、精度良く受信波の到来角を測定することが可能となる。
【0036】
また、上記一実施形態では、振幅モノパルス方式と、インターフェロメータ方式とを利用して到来方向を精度良く測定するようにしている。このため、インターフェロメータ方式を利用したアンテナを複数対用いて測定するよりも、レーダ波の到来方向を短時間で測定することが可能となる。
【0037】
また、上記一実施形態では、少なくとも4つのアンテナでレーダ波の到来方向を測定することが可能である。そのため、ハードウェア構成を小さく抑えることが可能となる。すなわち、本実施形態に係る電波受信装置は、飛しょう体に搭載させることが可能となる。
【0038】
したがって、本発明に係る電波受信装置は、レーダ波の到来方向を、精度良く、短時間で求めることができ、かつ小さなハードウェア規模を実現することができる。
【0039】
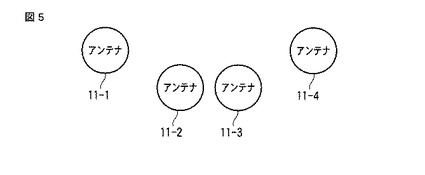
なお、この発明は上記実施形態に限定されるものではない。例えば上記一実施形態では、アンテナ11−1〜11−4が、図2に示すように、水平方向に一列に配列される例について説明したが、アンテナ11−1〜11−4の配列はこれに限定される訳ではない。例えば、アンテナ11−2,11−3が、図5に示すように、縦方向にずれている場合であっても同様に実施可能である。
【0040】
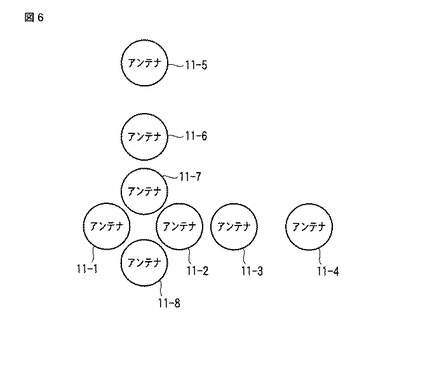
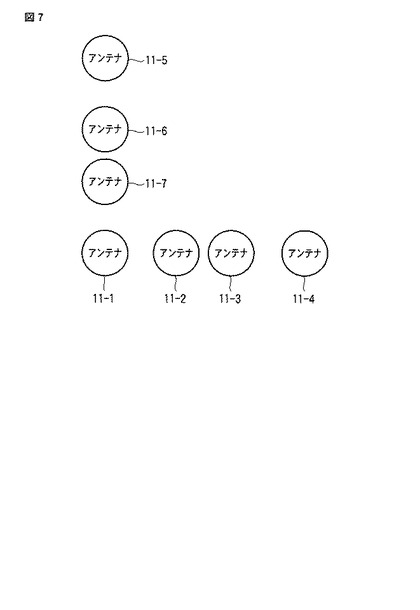
また、上記一実施形態では、図2に示すように、アンテナ11−1〜11−4を水平方向に配列し、1次元方向の測角を行う例について説明したが、本実施形態はこれに限定される訳ではない。例えば、図6に示すように、水平方向の測定をアンテナ11−1〜11−4で行い、垂直方向の測定をアンテナ11−5〜11−8で行う場合であっても同様に実施可能である。また、図7に示すように、水平方向の測定をアンテナ11−1〜11−4で行い、垂直方向の測定をアンテナ11−4〜11−7で行うことで、アンテナ11−4を水平方向と垂直方向とで共有する場合であっても同様に実施可能である。なお、図6及び図7に示すアンテナ配列の際、到来方向の測定処理は、水平方向と垂直方向とで並列して行なう。
【0041】
さらに、この発明は上記実施形態そのままに限定されるものではなく、実施段階ではその要旨を逸脱しない範囲で構成要素を変形して具体化できる。また、上記実施形態に開示されている複数の構成要素の適宜な組み合わせにより、種々の発明を形成できる。例えば、実施形態に示される全構成要素から幾つかの構成要素を削除してもよい。
【符号の説明】
【0042】
11−1〜11−4…アンテナ
12…アンテナ選択器
13…受信器
14…A/D変換器
15…信号処理部
151…検出器
152…測角処理選択器
153…粗測角処理器
154…精測角処理器
16…制御器
【技術分野】
【0001】
この発明は、到来するレーダ波を複数個のアンテナで受信し、そのレーダ波の到来方向を測定する電波受信装置及び到来方向測定方法に関する。
【背景技術】
【0002】
一般的に、レーダ波の発信源の方向を求める場合、一対のアンテナにより、振幅モノパルス方式又はインターフェロメータ方式を用いてレーダ波の到来方向を測定するようにしている。ここで、インターフェロメータ方式は、レーダ波の位相情報に基づいて到来方向を測定するため、レーダ波の振幅情報に基づいて到来方向を測定する振幅モノパルス方式よりも高精度であることが知られている。
【0003】
ところで、飛しょう体に搭載する電波受信装置では、飛しょう体前方に設置した一対の受信用アンテナでレーダ波を受信し、このレーダ波に基づいて振幅モノパルス方式又はインターフェロメータ方式を利用することにより、レーダ波の到来方向を測定する。
【0004】
しかしながら、飛しょう体ではレドームが尖った形状となっているため、レーダ波の到来方向の変化による位相の乱れが大きくなってしまう。そのため、インターフェロメータ方式を用いた測定では、正確な方向を測定することができない。
【0005】
一方、振幅モノパルス方式では、インターフェロメータ方式と比べて測角精度が低いため、飛しょう体の飛しょうに求められる精度が得られない。そこで、特許文献1のように、アンテナの設置数を増やし、複数のアンテナの組み合わせの最適解を求めることで、測角精度を上げることが可能である。しかしながら、飛しょう体では、小型化の観点から簡素な構造をとる必要がある。そのため、特許文献1の方法では、ハードウェア規模が大きくなり飛しょう体における電波受信装置に適さない。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開平8−5734号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
以上のように、飛しょう体に搭載する電波受信装置においては、レドームが尖った形状をしているため、インターフェロメータ方式を利用しての測角が正確に行えず、振幅モノパルス方式を利用した測角では、飛しょう体の飛しょうに必要な精度が得られなかった。
【0008】
この発明は上記事情によりなされたもので、その目的は、レーダ波の到来方向を、精度良く、短時間で求めることができ、かつ小さなハードウェア規模を実現することが可能な電波受信装置及び到来方向測定方法を提供することにある。
【課題を解決するための手段】
【0009】
上記目的を達成するため、本発明に係る電波受信装置は、予め設定された角度を持って配置され、レーダ波を受信する第1のアンテナ対と、予め設定された間隔を隔てて配列され、前記レーダ波を受信する第2のアンテナ対と、前記第1のアンテナ対により受信された第1の受信波、及び、第2のアンテナ対により受信された第2の受信波のうちいずれか一方の受信波を選択するアンテナ選択器と、前記アンテナ選択器で選択された受信波に対して受信処理を施す受信処理部と、前記受信処理部からの信号に基づいて振幅モノパルス方式を利用し、前記レーダ波の到来方向の粗測角を行った後、前記受信処理部からの信号に基づいてインターフェロメータ方式を利用すると共に、前記粗測角結果を参照して前記到来方向の精測角を行う信号処理部と、前記アンテナ選択器に、前記第1の受信波を選択させ、前記信号処理部に、前記第1の受信波による信号に基づいて前記粗測角を行わせる第1の制御と、前記アンテナ選択器に、第2の受信波を選択させ、前記信号処理部に、前記第2の受信波による信号に基づいて前記精測角を行わせる第2の制御とを行う制御器とを具備する。
【0010】
また、本発明に係る到来方向測定方法は、予め設定された角度を持って配置された第1のアンテナ対と、予め設定された間隔を隔てて配列された第2のアンテナ対とでレーダ波を受信し、前記第1のアンテナ対により受信された第1の受信波と、前記第2のアンテナ対により受信された第2の受信波とのうち、前記第1の受信波を選択し、前記第1の受信波に対して受信処理を施し、前記受信処理が施された信号に基づき、振幅モノパルス方式を利用して前記レーダ波の到来方向の粗測角を行い、前記第1の受信波と、前記第2の受信波とのうち、前記第2の受信波を選択し、前記第2の受信波に対して受信処理を施し、前記受信処理が施された信号に基づき、インターフェロメータ方式を利用すると共に、前記粗測角結果を参照して前記レーダ波の到来方向の精測角を行うことを特徴とする。
【0011】
上記構成による電波受信装置及び到来方向測定方法では、まず、位相変化の影響のない振幅モノパルス方式を利用してレーダ波の到来方向を測定する。その後に、高精度の測角が可能なインターフェロメータ方式を利用し、粗測角の結果を参照して、一意にレーダ波の到来方向を特定するようにしている。これにより、レドームの影響が比較的大きい位相情報の誤差を抑え、レーダ波の到来方向を精度良く、一意に求めることが可能となる。
【発明の効果】
【0012】
この発明によれば、レーダ波の到来方向を、精度良く、短時間で求めることができ、かつ小さなハードウェア規模を実現することが可能な電波受信装置を提供することができる。
【図面の簡単な説明】
【0013】
【図1】本発明の一実施形態に係る電波受信装置の機能構成を示すブロック図である。
【図2】図1のアンテナを飛しょう体の先端方向から見た場合の図である。
【図3】図1のアンテナを飛しょう体の側面方向から見た場合の図である。
【図4】図1の制御器が到来角の測定をする際の処理動作を示すフローチャートである。
【図5】図1のアンテナの配列例を示す図である。
【図6】図1のアンテナの配列例を示す図である。
【図7】図1のアンテナの配列例を示す図である。
【発明を実施するための形態】
【0014】
以下、図面を参照しながら本発明に係る電波受信装置の実施の形態について詳細に説明する。
【0015】
図1は、本発明の一実施形態に係る電波受信装置の機能構成を示すブロック図である。図1における電波受信装置は、アンテナ11−1〜11−4、アンテナ選択器12、受信処理部、信号処理部15及び制御器16を具備する。ここで、受信処理部は、受信器13及びアナログ−デジタル変換器(A/D変換器)14を備える。
【0016】
アンテナ11−1〜11−4は、他のレーダからのレーダ波を受信する。図2は、図1に示されるアンテナ11−1〜11−4を飛しょう体の先端方向から見た場合の模式図である。アンテナ11−1〜11−4は、水平方向に一列に配列される。
【0017】
また、図3は、図1に示されるアンテナ11−1〜11−4を飛しょう体の上面方向から見た場合の模式図である。アンテナ11−1,11−4は、同一方向を向くように配置される。一方、アンテナ11−2,11−3は、物体からの反射波を検出できるそれぞれの範囲が重なるように、所定の角度だけやや外側を向いて配置される。
【0018】
アンテナ選択器12は、アンテナ11−1〜11−4のうち、アンテナ11−1,11−4のアンテナ対又はアンテナ11−2,11−3のアンテナ対のうちいずれか一方のアンテナ対を制御器13からの指示により選択する。これにより、アンテナ選択器12は、アンテナ11−1,11−4からの受信波、又は、アンテナ11−2,11−3からの受信波のいずれか一方を選択して受信器13へ出力する。
【0019】
受信器13は、アンテナ11−2,11−3からの受信波を受け取った場合は、予め設定された範囲の周波数帯域で周波数をスイープさせて、受信波を検波する。また、アンテナ11−1,11−4からの受信波を受け取った場合は、制御器16から指定された周波数で受信波を検波する。受信器13で検波された受信波は、受信アナログ信号としてアナログ−デジタル変換器14でデジタル信号に変換され、信号処理部15へ出力される。
【0020】
信号処理部15は、受信アナログ信号に基づいてレーダ波の到来方向を測定する。信号処理部15は、検出器151、測角処理選択器152、粗測角処理器153及び精測角処理器154を備える。
【0021】
検出器151は、アナログ−デジタル変換器14からのデジタル信号の振幅値が予め設定された閾値を超えるか否かを判断する。検出器151は、閾値を超えた場合、受信波を検出したと判断し、制御器16に対して、受信波を検出した旨を示す検出信号を出力する。また、検出器は、アンテナ11−2,11−3からの受信波のデジタル信号が閾値を超えた場合、その超えたときの周波数を制御器16へ通知する。
【0022】
測角処理選択器152は、検出器151からのデジタル信号を、制御器16からの指示に基づいて、粗測角処理器153又は精測角処理器154のいずれかへ出力する。
【0023】
粗測角処理器153は、振幅モノパルス方式を利用し、アンテナ11−2,11−3からの受信波のデジタル信号に基づいて、レーダ波の到来角度を求める。粗測角処理器153は、アンテナ11−2からの受信波のデジタル信号の振幅をA2、アンテナ11−3からの受信波のデジタル信号の振幅をA3とし、和信号Σ及び差信号Δを算出する。
【0024】
Σ=A2+A3
Δ=A2−A3
粗測角処理器153は、誤差角係数をKとし、粗測角θ1を算出する。粗測角θ1は、
θ1=K・Δ/Σ
である。ここで、誤差角係数Kは、制御器16からの指示により決定する。
【0025】
精測角処理器154は、インターフェロメータ方式を利用し、アンテナ11−1,11−4からの受信波のデジタル信号に基づいて、レーダ波の到来角度を求める。精測角処理器154は、アンテナ11−1とアンテナ11−4との素子間隔をD[m]、受信波の周波数をF[Hz]、受信波の速度をC[m/s]、アンテナ11−1からの受信波のデジタル信号の位相値をφ1、アンテナ11−4からの受信波のデジタル信号の位相値をφ4とすると、精測角θ2は、
【数1】
【0026】
と算出される。ここで、精測角θ2は、サイン関数の周期性から複数の角度値を取りうる。精測角処理器154は、粗測角処理器153で算出された粗測角θ1を参照して、一意の精測角θ2を求める。すなわち、精測角処理器154は、粗測角θ1に最も近い精測角θ2をレーダ波の到来方向であると特定する。
【0027】
制御器16は、アンテナ選択器12、受信器13及び測角処理選択器152に対して制御を行う。
【0028】
次に、上記構成における動作を説明する。図4は、本発明に係る制御器16が到来角の測定をする際の処理動作を示すフローチャートである。
【0029】
まず、制御器16は、アンテナ選択器12に対して、アンテナ11−2,11−3を選択するように指示を出す(ステップS41)。制御器16は、検出器151からの検出信号があるか否かを判断する(ステップS42)。また、制御器16は、検出器151から、検出信号と共に、受信波が検出された周波数の通知を受ける。制御器16は、検出信号が無い場合(ステップS42のNo)、処理を終了する。
【0030】
制御器16は、検出信号があった場合(ステップS42のYes)、測角処理選択器152に対して、検出器151で検出された信号を粗測角処理器153へ出力するように指示を出す(ステップS43)。これにより、粗測角処理器153は、振幅モノパルス方式を利用し、アンテナ11−2,11−3からの受信波のデジタル信号に基づいて、粗測角θ1を算出する。制御器16は、算出された粗測角θ1を精測角処理器154へ出力するように指示を出す(ステップS44)。
【0031】
続いて、制御器16は、アンテナ選択器12に対して、アンテナ11−1,11−4を選択するように指示を出す(ステップS45)。制御器16は、検出器151から通知された周波数で受信波の検波をするように、受信器13に対して、検波周波数を指定する(ステップS46)。
【0032】
制御器16は、検出器151からの検出信号があるか否かを判断する(ステップS47)。制御器16は、検出信号が無い場合(ステップS47のNo)、処理を終了する。
【0033】
制御器16は、検出信号があった場合(ステップS47のYes)、測角処理選択器152に対して、検出器151で検出された信号を精測角処理器154へ出力するように指示を出す(ステップS48)。これにより、精測角処理器154は、インターフェロメータ方式を利用し、アンテナ11−1,11−4からの受信波のデジタル信号と、粗測角θ1に基づいて精測角θ2を算出する。
【0034】
以上のように、上記一実施形態では、電波受信装置は、まず振幅モノパルス方式を利用して粗測角θ1を算出する。振幅モノパルス方式を用いた測角は、測角精度は低いが、受信波の振幅情報に基づいて測角を行うため、レドームの影響が比較的少ない。このため、受信波の到来方向を概略的に求めることが可能となる。そして、受信電波装置は、粗測角θ1を参照し、インターフェロメータ方式を利用して精測角θ2を算出するようにしている。インターフェロメータ方式では、高精度に到来角を測定する場合、サイン関数の周期性から複数の角度値を取りうる。本実施形態では、振幅モノパルス方式を利用して粗測角θ1を予め算出しているため、精測角θ2を一意に算出することが可能となる。すなわち、本実施形態に係る電波受信装置は、レドームの影響が比較的大きい位相情報の誤差を抑え、レーダ波の到来方向を精度良く、一意に求めることが可能である。
【0035】
また、上記一実施形態では、振幅モノパルス方式を利用した粗測角θ1の算出の際に得られた周波数情報を、インターフェロメータ方式を利用した精測角θ2の算出に利用するようにしている。これにより、レーダ波が様々な周波数を取り得る場合であっても、検波周波数を予想しておく必要はない。つまり、レーダ波が様々な周波数を取り得る場合であっても、精度良く受信波の到来角を測定することが可能となる。
【0036】
また、上記一実施形態では、振幅モノパルス方式と、インターフェロメータ方式とを利用して到来方向を精度良く測定するようにしている。このため、インターフェロメータ方式を利用したアンテナを複数対用いて測定するよりも、レーダ波の到来方向を短時間で測定することが可能となる。
【0037】
また、上記一実施形態では、少なくとも4つのアンテナでレーダ波の到来方向を測定することが可能である。そのため、ハードウェア構成を小さく抑えることが可能となる。すなわち、本実施形態に係る電波受信装置は、飛しょう体に搭載させることが可能となる。
【0038】
したがって、本発明に係る電波受信装置は、レーダ波の到来方向を、精度良く、短時間で求めることができ、かつ小さなハードウェア規模を実現することができる。
【0039】
なお、この発明は上記実施形態に限定されるものではない。例えば上記一実施形態では、アンテナ11−1〜11−4が、図2に示すように、水平方向に一列に配列される例について説明したが、アンテナ11−1〜11−4の配列はこれに限定される訳ではない。例えば、アンテナ11−2,11−3が、図5に示すように、縦方向にずれている場合であっても同様に実施可能である。
【0040】
また、上記一実施形態では、図2に示すように、アンテナ11−1〜11−4を水平方向に配列し、1次元方向の測角を行う例について説明したが、本実施形態はこれに限定される訳ではない。例えば、図6に示すように、水平方向の測定をアンテナ11−1〜11−4で行い、垂直方向の測定をアンテナ11−5〜11−8で行う場合であっても同様に実施可能である。また、図7に示すように、水平方向の測定をアンテナ11−1〜11−4で行い、垂直方向の測定をアンテナ11−4〜11−7で行うことで、アンテナ11−4を水平方向と垂直方向とで共有する場合であっても同様に実施可能である。なお、図6及び図7に示すアンテナ配列の際、到来方向の測定処理は、水平方向と垂直方向とで並列して行なう。
【0041】
さらに、この発明は上記実施形態そのままに限定されるものではなく、実施段階ではその要旨を逸脱しない範囲で構成要素を変形して具体化できる。また、上記実施形態に開示されている複数の構成要素の適宜な組み合わせにより、種々の発明を形成できる。例えば、実施形態に示される全構成要素から幾つかの構成要素を削除してもよい。
【符号の説明】
【0042】
11−1〜11−4…アンテナ
12…アンテナ選択器
13…受信器
14…A/D変換器
15…信号処理部
151…検出器
152…測角処理選択器
153…粗測角処理器
154…精測角処理器
16…制御器
【特許請求の範囲】
【請求項1】
予め設定された角度を持って配置され、レーダ波を受信する第1のアンテナ対と、
予め設定された間隔を隔てて配列され、前記レーダ波を受信する第2のアンテナ対と、
前記第1のアンテナ対により受信された第1の受信波、及び、第2のアンテナ対により受信された第2の受信波のうちいずれか一方の受信波を選択するアンテナ選択器と、
前記アンテナ選択器で選択された受信波に対して受信処理を施す受信処理部と、
前記受信処理部からの信号に基づいて振幅モノパルス方式を利用し、前記レーダ波の到来方向の粗測角を行った後、前記受信処理部からの信号に基づいてインターフェロメータ方式を利用すると共に、前記粗測角結果を参照して前記到来方向の精測角を行う信号処理部と、
前記アンテナ選択器に、前記第1の受信波を選択させ、前記信号処理部に、前記第1の受信波による信号に基づいて前記粗測角を行わせる第1の制御と、前記アンテナ選択器に、第2の受信波を選択させ、前記信号処理部に、前記第2の受信波による信号に基づいて前記精測角を行わせる第2の制御とを行う制御器と
を具備することを特徴とする電波受信装置。
【請求項2】
前記信号処理部は、
前記受信処理部からの信号を受け取り、前記信号の振幅が予め設定された閾値を超えた場合、前記レーダ波を検出した旨を示す検出信号を生成する検出器と、
前記制御器からの指示に従って、前記受信処理部からの信号の出力先を選択する測角処理選択器と、
前記測角処理選択器からの信号に基づき、前記振幅モノパルス方式を利用して第1の方向を算出する粗測角処理器と、
前記測角処理選択器からの信号に基づき、前記インターフェロメータ方式を利用して第2の方向を算出し、前記第2の方向のうち前記第1の方向に最も近い方向を前記到来方向と特定する精測角処理器と
を備え、
前記制御器は、前記第1の制御において、前記測角処理選択器に、前記受信処理部からの信号を前記粗測角処理器へ出力させ、前記第2の制御において、前記測角処理選択器に、前記受信処理部からの信号を前記精測角処理器へ出力させることを特徴とする請求項1記載の電波受信装置。
【請求項3】
前記受信処理部は、前記アンテナ選択器で前記第1の受信波が選択された場合は、予め設定された範囲の周波数帯域で周波数をスイープさせて前記第1の受信波を検波し、前記アンテナ選択器で前記第2の受信波が選択された場合は、前記制御器により指定された指定周波数で前記第2の受信波を検波し、
前記信号処理部は、前記第1の受信波が検波された検波周波数を前記制御器へ通知し、
前記制御器は、前記信号処理部からの検波周波数に基づいて、前記受信処理部に対して前記指定周波数を指定することを特徴とする請求項1記載の電波受信装置。
【請求項4】
予め設定された角度を持って配置された第1のアンテナ対と、予め設定された間隔を隔てて配列された第2のアンテナ対とでレーダ波を受信し、
前記第1のアンテナ対により受信された第1の受信波と、前記第2のアンテナ対により受信された第2の受信波とのうち、前記第1の受信波を選択し、
前記第1の受信波に対して受信処理を施し、
前記受信処理が施された信号に基づき、振幅モノパルス方式を利用して前記レーダ波の到来方向の粗測角を行い、
前記第1の受信波と、前記第2の受信波とのうち、前記第2の受信波を選択し、
前記第2の受信波に対して受信処理を施し、
前記受信処理が施された信号に基づき、インターフェロメータ方式を利用すると共に、前記粗測角結果を参照して前記レーダ波の到来方向の精測角を行うことを特徴とする到来方向測定方法。
【請求項1】
予め設定された角度を持って配置され、レーダ波を受信する第1のアンテナ対と、
予め設定された間隔を隔てて配列され、前記レーダ波を受信する第2のアンテナ対と、
前記第1のアンテナ対により受信された第1の受信波、及び、第2のアンテナ対により受信された第2の受信波のうちいずれか一方の受信波を選択するアンテナ選択器と、
前記アンテナ選択器で選択された受信波に対して受信処理を施す受信処理部と、
前記受信処理部からの信号に基づいて振幅モノパルス方式を利用し、前記レーダ波の到来方向の粗測角を行った後、前記受信処理部からの信号に基づいてインターフェロメータ方式を利用すると共に、前記粗測角結果を参照して前記到来方向の精測角を行う信号処理部と、
前記アンテナ選択器に、前記第1の受信波を選択させ、前記信号処理部に、前記第1の受信波による信号に基づいて前記粗測角を行わせる第1の制御と、前記アンテナ選択器に、第2の受信波を選択させ、前記信号処理部に、前記第2の受信波による信号に基づいて前記精測角を行わせる第2の制御とを行う制御器と
を具備することを特徴とする電波受信装置。
【請求項2】
前記信号処理部は、
前記受信処理部からの信号を受け取り、前記信号の振幅が予め設定された閾値を超えた場合、前記レーダ波を検出した旨を示す検出信号を生成する検出器と、
前記制御器からの指示に従って、前記受信処理部からの信号の出力先を選択する測角処理選択器と、
前記測角処理選択器からの信号に基づき、前記振幅モノパルス方式を利用して第1の方向を算出する粗測角処理器と、
前記測角処理選択器からの信号に基づき、前記インターフェロメータ方式を利用して第2の方向を算出し、前記第2の方向のうち前記第1の方向に最も近い方向を前記到来方向と特定する精測角処理器と
を備え、
前記制御器は、前記第1の制御において、前記測角処理選択器に、前記受信処理部からの信号を前記粗測角処理器へ出力させ、前記第2の制御において、前記測角処理選択器に、前記受信処理部からの信号を前記精測角処理器へ出力させることを特徴とする請求項1記載の電波受信装置。
【請求項3】
前記受信処理部は、前記アンテナ選択器で前記第1の受信波が選択された場合は、予め設定された範囲の周波数帯域で周波数をスイープさせて前記第1の受信波を検波し、前記アンテナ選択器で前記第2の受信波が選択された場合は、前記制御器により指定された指定周波数で前記第2の受信波を検波し、
前記信号処理部は、前記第1の受信波が検波された検波周波数を前記制御器へ通知し、
前記制御器は、前記信号処理部からの検波周波数に基づいて、前記受信処理部に対して前記指定周波数を指定することを特徴とする請求項1記載の電波受信装置。
【請求項4】
予め設定された角度を持って配置された第1のアンテナ対と、予め設定された間隔を隔てて配列された第2のアンテナ対とでレーダ波を受信し、
前記第1のアンテナ対により受信された第1の受信波と、前記第2のアンテナ対により受信された第2の受信波とのうち、前記第1の受信波を選択し、
前記第1の受信波に対して受信処理を施し、
前記受信処理が施された信号に基づき、振幅モノパルス方式を利用して前記レーダ波の到来方向の粗測角を行い、
前記第1の受信波と、前記第2の受信波とのうち、前記第2の受信波を選択し、
前記第2の受信波に対して受信処理を施し、
前記受信処理が施された信号に基づき、インターフェロメータ方式を利用すると共に、前記粗測角結果を参照して前記レーダ波の到来方向の精測角を行うことを特徴とする到来方向測定方法。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2011−27544(P2011−27544A)
【公開日】平成23年2月10日(2011.2.10)
【国際特許分類】
【出願番号】特願2009−173505(P2009−173505)
【出願日】平成21年7月24日(2009.7.24)
【出願人】(000003078)株式会社東芝 (54,554)
【Fターム(参考)】
【公開日】平成23年2月10日(2011.2.10)
【国際特許分類】
【出願日】平成21年7月24日(2009.7.24)
【出願人】(000003078)株式会社東芝 (54,554)
【Fターム(参考)】
[ Back to top ]