
電波計測システム
【課題】屋内エリアの地図データを作成し、作成した地図データに基づいて管理者により指定された経路を自律的に移動しながら電波環境データを測定する。
【解決手段】周囲の壁面までの距離を方位毎に測距する測距センサ207と、屋内エリア内に設置されたアクセスポイントからの電波の受信電力を予め定めた一定の時間間隔で測定する受信電力測定部203と、受信電力測定部203で測定された受信電力データの大きさを判定する受信電力判定部215と、測距センサ207により測距された測距データから屋内エリアの地図データを作成する地図データ作成部217と、サーバから与えられる走行データにより指定される走行経路に沿って自律的に自ロボットを走行させる走行手段208、209と、受信電力判定部215の判定結果に基づいて走行手段を構成するモータ209の回転速度を制御して自ロボットの移動速度を制御するモータ回転制御部216とを備える。
【解決手段】周囲の壁面までの距離を方位毎に測距する測距センサ207と、屋内エリア内に設置されたアクセスポイントからの電波の受信電力を予め定めた一定の時間間隔で測定する受信電力測定部203と、受信電力測定部203で測定された受信電力データの大きさを判定する受信電力判定部215と、測距センサ207により測距された測距データから屋内エリアの地図データを作成する地図データ作成部217と、サーバから与えられる走行データにより指定される走行経路に沿って自律的に自ロボットを走行させる走行手段208、209と、受信電力判定部215の判定結果に基づいて走行手段を構成するモータ209の回転速度を制御して自ロボットの移動速度を制御するモータ回転制御部216とを備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、電波計測システムに係り、特に、屋内エリアの地図データを作成し、作成した地図データによる屋内エリアの範囲内を移動しながら電波環境データを計測する電波計測システムに関する。
【背景技術】
【0002】
近年の移動体無線通信の技術は、ユーザの利用場所や移動する速度の制約をなくし、自由にネットワークへの接続を可能としたユビキタスネットワークへの展開が期待されている。一般に、移動体無線通信は、鉄塔や高層ビルの上から電波を放射することによって通信を確立させているが、電波の特性上、鉄塔や高層ビルの上からの電波の放射だけでは屋内空間や地下空間までカバーすることができない。この問題を解決するため、従来の移動体無線通信システムは、電波の届きにくい場所に、小型の無線基地局を設置し、無線通信の品質安定を確保すると同時に、通信エリアの拡大を図っている。しかし、それでも屋内エリアには、電波の不感地帯が存在することが避けられない。屋内エリアで良好な電波環境を構築するためには、エリア内の電波環境データを計測し、最適な場所に小型基地局を設置する必要がある。
【0003】
エリア内の電波環境データの計測方法に関する従来技術として、人手による方法、あるいは、特許文献1等に記載された技術を用いる方法が知られている。この従来技術は、予め地図データが与えられていて、無線通信によって操作可能な範囲内において自律移動しながら電波環境データを計測するロボットを用いるというものである。また、自己位置を検知しながら自律的に移動可能なロボットに関する技術が、例えば、特許文献2等に記載されて知られている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2008−90575号公報
【特許文献2】特開2008−250906号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
前述した従来の人手作業による計測方法は、限られた作業時間内で作業者が測定器を持ち回りながら計測を行うことになるため、得られた測定データが瞬時的な値であるのか、屋内構造に起因した不感地帯のものであるのかが明確にならず、また、サンプル数も少ないため、得られたデータも信頼性の低いものである。また、人手による方法は、計測のために多くの人件費を要するものである。
【0006】
一方、特許文献1に記載の従来技術は、無線通信によって自律移動が可能なロボットを使用して電波環境の計測を行っているため、人手による計測に比べると同一の測定条件での計測を複数回にわたって行うことができ、信頼性の高いデータを得ることができる。
【0007】
しかし、この従来技術は、無線電波の届かない領域でのロボットの操作が不可能となり、計測範囲が限られてしまうという問題点を有し、また、ノイズ等の何らかの影響により無線通信が不可能になると計測が不可能になってしまうという問題点を生じる。また、この従来技術は、計測エリアの地図データを事前に作成し、ロボットにダウンロードしておかなければ動作することができないという問題点を有しており、さらに、電波測定を行う測定ポイントに赤外線センサに反応するマーキングを設置する必要があり、エリア全体の細かな箇所にロボットを行かせることが困難であり、細かな個所の計測を行うことができないという問題点を有している。
【0008】
また、前述の従来技術は、前述したようなマーキングを使用しない場合、地図データを格子状に区切り、格子点毎に電波測定を行うようにすることもできるが、この場合、計測ポイントを細かい間隔で設定することができないという問題点を生じてしまう。また、前述の従来技術は、重点的に測定したいエリアがある場合、そのエリアを保守端末から指定することができるが、測定ポイントを数ポイントしか指定することができないため、エリア内を細かく電波測定したい場合、人手によってロボットを誘導してその穴を埋めていかなければならないという問題点をも有している。そして、前述の従来技術は、同一の測定ポイントでの測定回数も一律に10回程度の少ない回数に決められているので、無線電波環境が悪いポイントにおける測定精度のばらつきを吸収することができないため、効率よく屋内の電波環境を知ることができないという問題点を有している。
【0009】
本発明の目的は、前述したような従来技術の問題点を解決し、屋内エリアの地図データを作成し、作成した地図データに基づいて管理者により指定された経路を自律的に移動しながら電波環境データを測定する電波計測システムを提供することにある。
【課題を解決するための手段】
【0010】
本発明によれば前記目的は、屋内エリアを移動しながら電波環境データを計測するロボットと、該ロボットとの間で通信可能に設けられたサーバとを備える電波計測システムにおいて、前記ロボットは、周囲の壁面までの距離を方位毎に測距する測距手段と、前記屋内エリア内に設置されたアクセスポイントからの電波の受信電力を予め定めた一定の時間間隔で測定する受信電力測定手段と、該受信電力測定手段で測定された受信電力データの大きさを判定する受信電力判定手段と、前記測距手段により測距された測距データから前記屋内エリアの地図データを作成する地図データ作成手段と、前記サーバから与えられる走行データにより指定される走行経路に沿って自律的に自ロボットを走行させる走行手段と、前記受信電力判定手段の判定結果に基づいて前記走行手段を構成するモータの回転速度を制御して自ロボットの移動速度を制御するモータ回転制御手段とを備えたことにより達成される。
【発明の効果】
【0011】
本発明によれば、屋内エリアの地図データを作成して、屋内の電波環境を自律的に、かつ、効率的に計測することができる。
【図面の簡単な説明】
【0012】
【図1】本発明の一実施形態による電波計測システムの構成を示すブロック図である。
【図2】自律移動型電波計測ロボットの構成を示すブロック図である。
【図3】サーバの構成を示すブロック図である。
【図4】本発明の実施形態による電波計測システムでの処理動作の概要を説明するフローチャートである。
【図5】自律移動型電波測定ロボットが自身の走行速度を制御する処理動作を説明する速度制御シーケンスチャートである。
【図6】受信電力判定部での処理動作である図5に示すフローのステップ504、505での処理の詳細を説明するフローチャートである。
【図7】Pilot 信号の受信電力に応じたモータ回転制御部からのモータ回転制御の速度変化を説明する図である。
【図8】自律移動型電波測定ロボットが地図データを作成する処理動作を説明するシーケンスチャートである。
【図9】自律移動型電波測定ロボットが自身の居る現在位置データを作成する処理動作を説明するシーケンスチャートである。
【図10】測距データの取得イメージと測距データの格納イメージと示す図である。
【図11】自律移動型電波測定ロボットから地図データをサーバに格納する処理動作を説明するシーケンスチャートである。
【図12】保守端末から入力された走行データを自律移動型電波測定ロボットに通知する処理動作を説明するシーケンスチャートである。
【図13】現在位置データと受信電力(RSSI)データとを日時の情報と共にメモリに格納したデータ格納イメージを示す図である。
【図14】地図データと走行データとのイメージを示す図である。
【図15】自律移動型電波測定ロボットから受信電力データをサーバに送信し、サーバが統計データを作成する処理動作を説明するシーケンスチャートである。
【図16】サーバの制御部が受信電力データを加工して得た統計受信電力データのグラフを示す図である。
【発明を実施するための形態】
【0013】
以下、本発明による電波計測システムの実施形態を図面により詳細に説明する。
【0014】
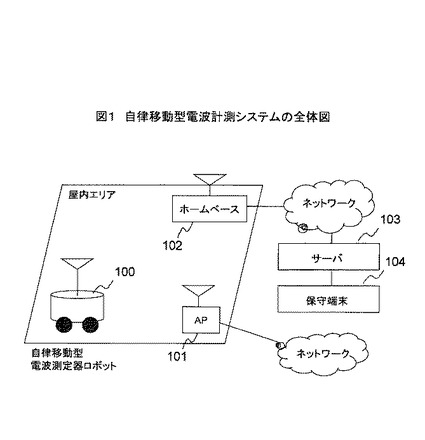
図1は本発明の一実施形態による電波計測システムの構成を示すブロック図である。
【0015】
本発明の一実施形態による電波計測システムは、電波の状況を測定しようとしている屋内エリアに、屋内型小型基地局装置としてのアクセスポイント(以下、APという)101と、このアクセスポイント101から送信される電波状況を調査する自律的に移動することが可能な電波計測装置としての自律移動型電波測定ロボット100と、この自律移動型電波測定ロボット100が自身の持つバッテリーを充電するするためのホームベース102とを配置し、屋内エリアの外部にネットワークを介してホームベース102に接続されるサーバ103と、このサーバ103に接続されて、管理者が使用する保守端末104とを備えて構成されている。なお、AP101は、ネットワークを介して情報サービス等を行う外部装置に接続される。
【0016】
前述において、自律移動型電波測定ロボット100は、自身の持つバッテリーの残量が低下すると、ホームベース102に移動してバッテリーへの充電を開始する。ホームベース102は、バッテリーに対する充電機能と、充電時に自律移動型電波測定ロボット100が採取した電波の計測値、ここでは、AP101が送信するパイロット信号の受信電力の強度データを受け取り、ネットワークを経由してサーバ103へ転送する機能とを有している。また、自律移動型電波測定ロボット100とホームベース102とは、無線インターフェイスを具備しており、自律移動型電波測定ロボット100が移動中にも、無線通信によって相互に情報の授受をする機能をも有している。サーバ103は、自律移動型電波測定ロボット100から受け取った受信電力の強度データを日々蓄積する機能と、そのデータを統計計算する機能とを有している。その結果は、保守端末104から保守者が閲覧することができる。
【0017】
なお、前述の自律移動型電波測定ロボット100は、車輪により床面上を自律的に移動可能とされているので、その背面に床を掃除する手段を具備させることもできる。
【0018】
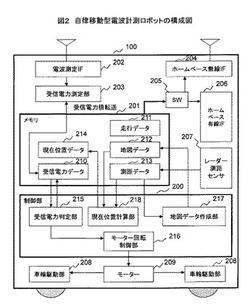
図2は自律移動型電波計測ロボット100の構成を示すブロック図である。
【0019】
自律移動型電波測定ロボット100は、アクセスポイント101からのPilot 信号を受信する機能を持つ電波測定IF202と、受信したPilot 信号の受信電力の強度を予め定めた一定時間毎に測定する機能を持つ受信電力測定部203と、各種データを格納するメモリ201と、移動用の車輪の駆動部208と、駆動用のモータ209と、後述するような制御機能を有する制御部200と、屋内の壁面までの距離を測定するレーダー測距センサ207と、ホームベースのIFと接続するためのホームベース無線IF204及びホームベース有線IF206と、これらのIFを切り替えるスイッチ205とを備えて構成される。
【0020】
そして、メモリ201には、測定されたPilot 信号の受信電力データ210、レーダー測距センサ207による測距データ213、保守端末104から与えられる走行経路である走行データ211、制御部200が生成した地図データ212及び現在位置データ214が格納される。また、制御部200は、レーダー測距センサ207が測定した測距データ214に基づいて地図を作成する地図データ作成部217と、地図データ213及び測距データ214を用いて自ロボットの現在位置を算出する現在位置計算部218と、受信電力データ210の大きさを判定する受信電力判定部215と、受信電力の大きさに基づいてモータ209の回転数を制御するモータ回転制御部216とを備えて構成されている。
【0021】
さらに、自律移動型電波計測ロボット100は、自律的な移動のため、モータ209と車輪駆動部208とによる走行部を有しており、モータ回転制御部216から制御され、また、その指示により指定される速度に従って、走行データ211により指定される走行経路上を指定された速度で移動しながら受信電力の測定を行う。
【0022】
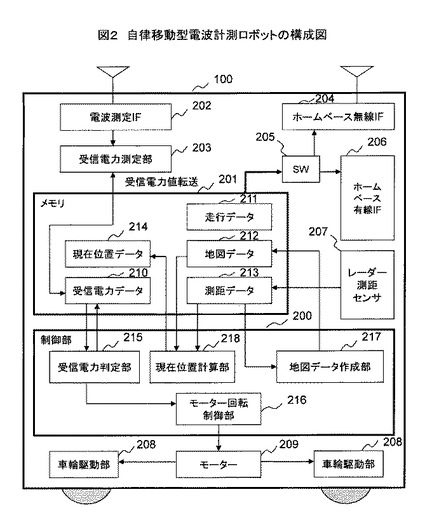
図3はサーバ103の構成を示すブロック図である。
【0023】
サーバ103は、ホームベース102とネットワークとを介して自律移動型電波測定ロボット100との間で情報の授受を行うホームベースIF300と、自律移動型電波測定ロボット100が採取した受信電力データ304、地図データ305、保守端末303より指示される走行データ306を格納すると共に、制御部302によって計算された統計受信電力データ307を保持しておく機能をもつメモリ301と、受信電力データ304と統計受信電力データ307とを加工し、統計受信電力データ307を作成、更新する受信電力データ加工部308を有する制御部302と、保守端末104から指示を受ける機能を持つ保守端末IF303とにより構成されている。
【0024】
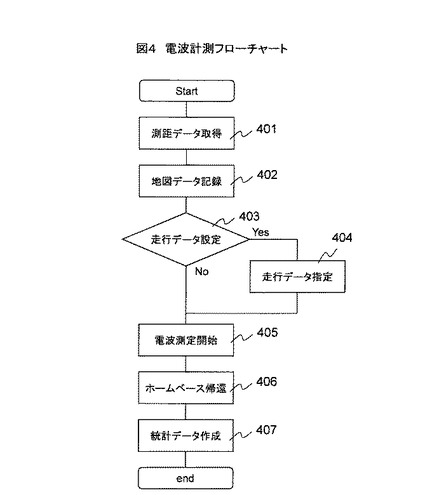
図4は本発明の実施形態による電波計測システムでの処理動作の概要を説明するフローチャートであり、次に、これについて説明する。ここで説明する処理は、自律移動型電波測定ロボット100が、起動された後に距離データ213を収集して、その距離データ213に基づいて地図データ212を作成し、作成した地図データ212をもとに電波計測を行い、計測結果をサーバ103に送信して記録させる処理である。なお、ここで説明するフローにおける各処理の詳細については、図5〜図16を参照して後述する。
【0025】
(1)自律移動型電波計測ロボット100は、電波環境を計測する屋内に設置されて、電波計測の処理の処理を開始すると、電波計測に先立って周囲の壁面までの距離を測定して測距データを取得し、取得した測距データを用いて地図データを作成、記録し、その地図データをサーバ103に送信する(ステップ401、402)。
【0026】
(2)次に、自律移動型電波計測ロボット100は、自ロボットが走行するルートである走行データがメモリ201内に格納されておらず、走行データの設定が必要か否かを判定し、走行データの設定が必要であった場合、サーバ103に送信した地図データに基づいて操作者に走行データ211を作成してもらい、その走行データ211をサーバから受け取って自ロボットのメモリ201内に格納する(ステップ403、404)。
【0027】
(3)ステップ403の判定で、走行データ211がすでにメモリ201内に格納されていて、走行データの設定が不必要であった場合、あるいは、ステップ404の処理で走行データをサーバから受け取ってメモリ内に格納した後、自律移動型電波計測ロボット100は、走行データに従って屋内を移動しながら電波の測定を開始し、予め定めた一定時間毎に、自ロボット100の現在位値と受信電力とを測定し、測定した現在位値し受信電力とのデータを自ロボット内のメモリ201に格納していく(ステップ405)。
【0028】
(4)自律移動型電波計測ロボット100は、電波計測の途中で、あるいは、ホームベース102に帰還したとき、メモリ201に格納していた現在位置データ214及び受信電力データ210をサーバ103に送信する。サーバ103は、受け取った受信電力データから日々の統計受信電力データを作成する(ステップ406、407)。
【0029】
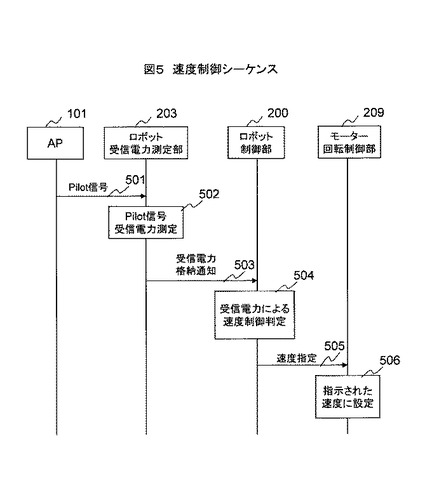
図5は自律移動型電波測定ロボット100が自身の走行速度を制御する処理動作を説明する速度制御シーケンスチャートであり、次に、これについて説明する。自律移動型電波測定ロボット100は、自律的に移動することができるものであり、その速度は、アクセスポイント101から送信されるPilot 信号の受信強度により制御される。
【0030】
(1)AP101は、屋内エリアに対してPilot 信号を放射しており、自律移動型電波測定ロボット100の受信電力測定部203は、そのPilot 信号を受信するとPilot 信号の受信電力の測定を行う(ステップ501、502)。
【0031】
(2)受信電力測定部203は、測定された受信電力データを、メモリ201に受信電力データ211として格納すると同時に、制御部200に受信電力をメモリ201に格納したことを通知する(ステップ503)。
【0032】
(3)受信電力格納通知信号を受け取った制御部200の受信電力判定部215は、受信電力を判定すると共に、その電力に従ったロボットの走行速度を判定し、その判定結果に従って、モータ回転制御部216にモータ209に対して回転速度を制御する制御情報(速度指定情報)を送信する(ステップ504、505)。
【0033】
(4)モータ回転制御部216は、受け取ったロボットの走行速度によりモータ209の回転速度を設定してモータ209を制御し、モータ209は、指示された速度に設定されてロボット本体を走行させる(ステップ506)。
【0034】
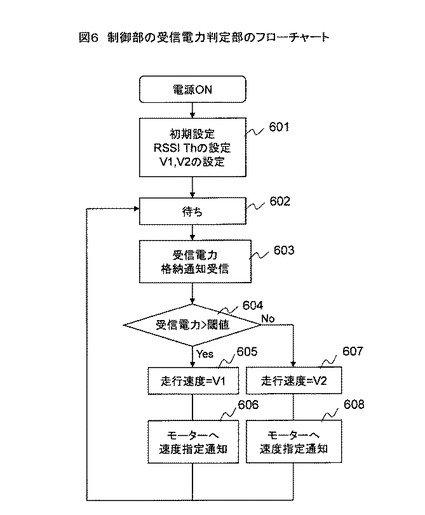
図6は受信電力判定部215での処理動作である図5に示すフローのステップ504、505での処理の詳細を説明するフローチャートであり、次に、これについて説明する。
【0035】
(1)自律移動型電波測定ロボット100は、電源がONとされると、自ロボットの走行速度を変更する制御に使用するPilot 信号の受信電力RSSIの大きさの閾値Th、ロボットの速度V1、V2の初期設定を行うことを操作者に求める。この初期設定は、ロボットの外側に設定ボタンを設けて操作させる方法や保守端末104からホームベース102を経由して設定させるようにすることもできる(ステップ601)。
【0036】
(2)自律移動型電波測定ロボット100は、初期設定が完了すると待ち状態になる。そして、受信電力判定部215は、受信電力格納通知を受信すると、メモリ201に格納されている受信電力データ210を読み出し、その受信電力がステップ601の処理で予め設定された閾値Thより大きいか否かを比較判定する(ステップ602〜604)。
【0037】
(3)受信電力判定部215は、ステップ604での比較判定の結果、受信電力が閾値より大きかった場合、ロボットの走行速度をV1とするように指定し、モータ回転制御部216にモータ209の制御を行うように速度指定通知を行う。この通知の後、自律移動型電波測定ロボット100は、ステップ602からの処理に戻って待ち状態となる(ステップ605、606)。
【0038】
(4)受信電力判定部215は、ステップ604での比較判定の結果、受信電力が閾値より小さかった場合、ロボットの走行速度をV2とするように指定し、モータ回転制御部216にモータ209の制御を行うように速度指定通知を行う。この通知の後、自律移動型電波測定ロボット100は、ステップ602からの処理に戻って待ち状態となる(ステップ607、608)。
【0039】
前述の処理で指定した自律移動型電波測定ロボット100に対する走行速度のV1、V2は、V1がV2より大きく設定される。これにより、Pilot 信号の受信電力が小さく電波の不感地帯に入ったようなとき、ロボット自身の推進速度を落とすことができ、一定時間間隔で行っている電力測定の移動する経路上の距離に対する回数を増加させることができる。
【0040】
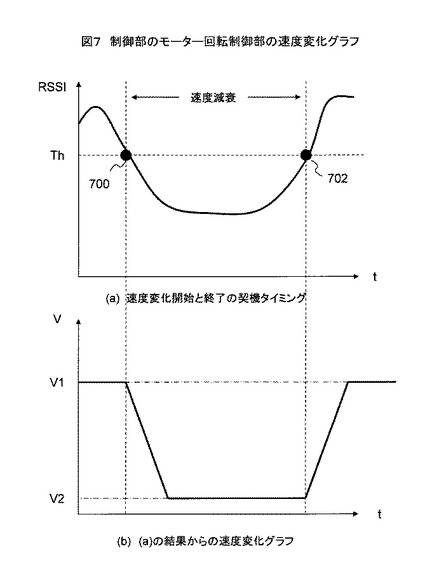
図7はPilot 信号の受信電力に応じたモータ回転制御部216からのモータ回転制御の速度変化を説明する図である。図7(a)には、Pilot 信号の受信電力RSSIの大きさに対する走行しているロボットの時間経過による変化を示しており、また、図7(b)には、受信電力判定部215がモータ回転制御部216に送信するモータ209に対する速度指定通知の時間経過による変化を示している。
【0041】
図7(a)に示すように、自律移動型電波測定ロボット100は、走行しながらPilot 信号の受信電力RSSIの大きさを計測しており、受信電力RSSIの大きさが、ある時刻700で閾値Thを下まわると、図7(b)に示すように、モータ回転制御部216に送信するモータ209に対する速度指定通知の速度をV1からV2に変化させる。また、しばらくして、ある時刻702で受信電力RSSIの大きさが閾値Thより大きくなると、モータ回転制御部216に送信するモータ209に対する速度指定通知の速度をV2からV1に変化させる。
【0042】
本発明の実施形態は、前述のような動作を行うことにより、受信電力の低いエリアに自律移動型電波測定ロボット100が進んだ場合、自身の速度を設定された小さな速度V2として、測定を続けていくことになる。なお、電波測定タイミングは、すでに説明したように、一定時間間隔に予め設定されていて不変であり、自律移動型電波測定ロボット100の推進速度が低ければ低いほど測定回数は増えていく。この機能によって、受信電力の小さい電波の不感地帯の受信電力データ210の取得回数を増やし、サンプル数を増やすことができる。
【0043】
自律移動型電波測定ロボット100は、屋内エリアの地図データ212を自動的に作成し自身の現在地を認識した上で、Pilot 信号の受信電力の大きさを測定しており、次に、地図データの作成と現在位置の認識との方法を説明する。
【0044】
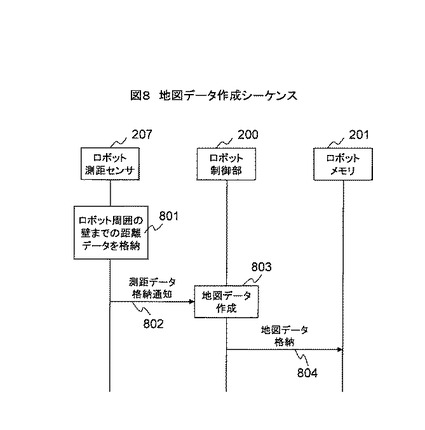
図8は自律移動型電波測定ロボット100が地図データを作成する処理動作を説明するシーケンスチャートであり、次に、これについて説明する。
【0045】
(1)自律移動型電波測定ロボット100は、周囲の環境を認識するための測距センサ207を具備している。測距センサ207は、周囲の壁までの距離を計測し、メモリ201に測距データ213として格納すると同時に、制御部200に測距データをメモリ201に格納したことを通知する(ステップ801、802)。
【0046】
(2)測距データ格納の通知を受けた制御部200の地図データ作成部217は、メモリ201から測距データ213を読み出し、地図データの作成を開始する。測距データ213は、一定時間毎に測定されて取得されれているので、地図データ作成部217は、その複数の測距データ213から地図データ212を作成し、地図データ212が完成するとメモリ201へ地図データ212として格納する(ステップ803、804)。
【0047】
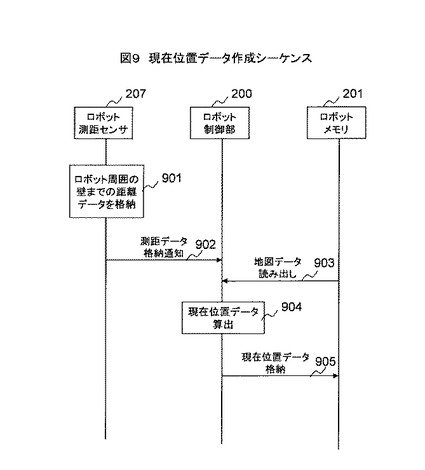
図9は自律移動型電波測定ロボット100が自身の居る現在位置データを作成する処理動作を説明するシーケンスチャートであり、次に、これについて説明する。
【0048】
(1)自律移動型電波測定ロボット100は、周囲の環境を認識するための測距センサ207を具備している。測距センサ207は、周囲の壁までの距離を計測し、メモリ201に測距データ213として格納すると同時に、制御部200に測距データをメモリ201に格納したことを通知する(ステップ901、902)。
【0049】
(2)測距データ格納の通知を受けた制御部200の現在位置計算部218は、メモリ201から地図データ212と測距データ213とを読み出し、最新の測距データを元に自身の現在位置を計算し、現在位置データを作成後、メモリ200に現在位置データ214として格納する(ステップ903〜905)。
【0050】
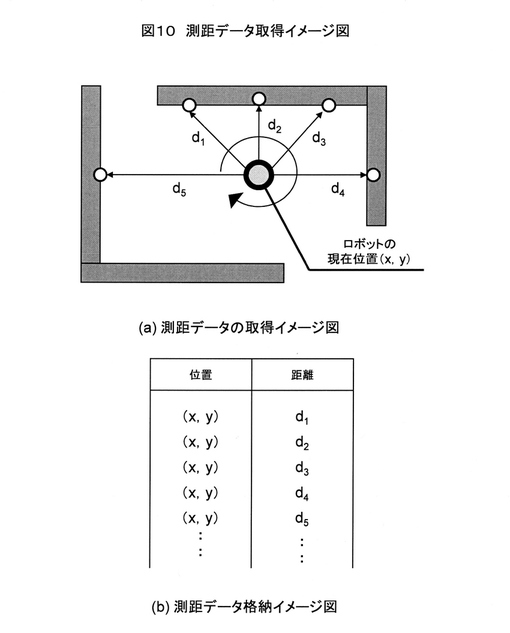
図10は測距データの取得イメージと測距データの格納イメージとを示す図であり、次に、図10を参照して、自律移動型電波測定ロボット100が周囲の壁までの距離を計測する方法を説明する。
【0051】
図10(a)に示すように、ロボットが居る地点の座標を(x、y)と仮定し、その地点で360度ロボットが回転し、測距センサ207は、ある一定角度毎に瞬時パルスを発射し、反射波を受けるまでの時間から距離d1〜dnを計算する。このような測距データは、図10(b)に示すように、ロボットが居る地点の座標(x、y)と、図示していないが方位の情報と、座標を(x、y)からの距離d1〜dnの組としてメモリ201に格納される。
【0052】
周囲からのパルスの反射により計算された距離により決まるポイントは、前述の座標(x、y)を基準とした点座標として記録されていくため、この点座標は、ロボットが測定を行うたびに多くなっていく。このような距離データの点座標のデータは、ICPアルゴリズム用いて平均化され、これを用いて地図データを作成することができる。
【0053】
前述したような点座標データの計算方法の詳細については、特許文献2等により詳述されているので、ここでの説明は省略する。また、前述の測距データを取得するための測距センサ207は、赤外線、可視光を利用したものであってよい。
【0054】
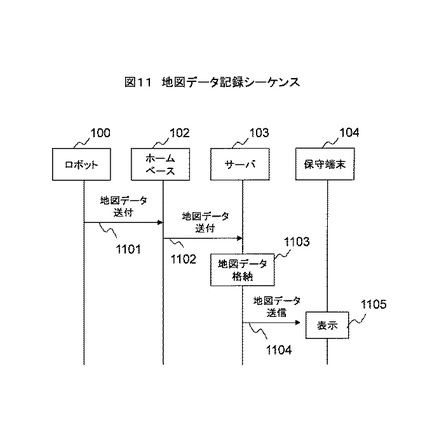
図11は自律移動型電波測定ロボット100から地図データをサーバ103に格納する処理動作を説明するシーケンスチャートであり、次に、これについて説明する。
【0055】
(1)自律移動型電波測定ロボット100は、地図データ作成部217が前述した方法により地図データ212を作成してメモリ201に格納すると、ホームベース102に対して、無線通信によって、または、充電を行うときに有線通信によって地図データを転送する(ステップ1101)。
【0056】
(2)ホームベース102は、自律移動型電波測定ロボット100から地図データ212を受信すると、その地図データ212をサーバ103へ転送する(ステップ1102)。
【0057】
(3)サーバ103は、地図データ212を受信すると、受信した地図データを一旦自身が持つメモリ301に地図データ305として保存してから保守端末104へ送信して表示させる(ステップ1103〜1105)。
【0058】
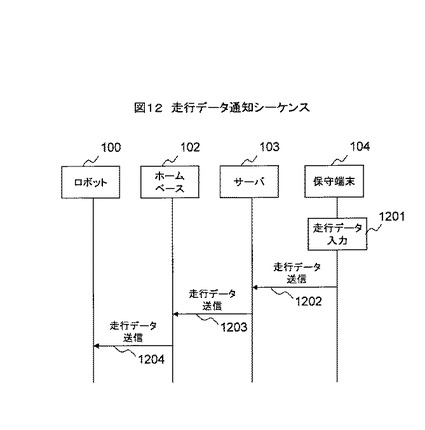
図12は保守端末104から入力された走行データを自律移動型電波測定ロボット100に通知する処理動作を説明するシーケンスチャートであり、次に、これについて説明する。
【0059】
(1)操作者は、図11に示すフローにより説明した処理により、保守端末104に表示された地図データを見て、自律移動型電波測定ロボット100に電波状態を計測させる走行経路を決定し、その走行経路を走行データとして作成し、作成した走行データを保守端末104に入力してサーバ103に送信させる(ステップ1201、1202)。
【0060】
(2)保守端末104から走行データを受け取ったサーバ103は、その走行データをホームベース102に転送し、ホームベース102も、同様に、受け取った走行データを無線IF204を介して、または、充電時に有線IF206を介して自律移動型電波測定ロボット100に転送する(ステップ1203、1204)。
【0061】
(3)自律移動型電波測定ロボット100は、走行データを受信すると、メモリ201に走行データ211として記憶し、この走行データに指定されたルートを経由するように走行動作する。
【0062】
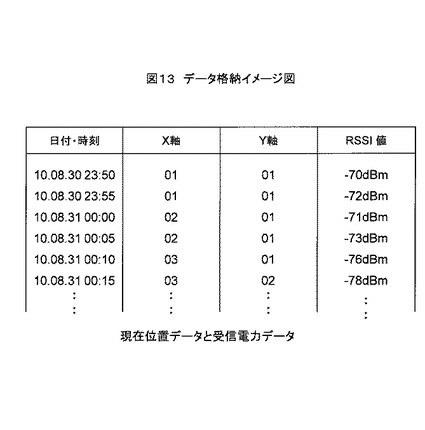
図13は現在位置データ215と受信電力(RSSI)データ211とを日時の情報と共にメモリ201に格納したデータ格納イメージを示す図である。
【0063】
自律移動型電波測定ロボット100のメモリ201には、図13に示すように、Pilot 信号の受信電力を測定した日付・日時の情報と、X軸及びY軸の座標によるPilot 信号の受信電力を測定した位置の情報である現在位置データ215と、Pilot 信号の受信電力の大きさを示すRSSI値の情報とを組とした複数のレコードが格納されている。このデータは、複数の日にわたって取得され、自律移動型電波測定ロボット100からホームベース102を介してサーバ103に日々記録される。
【0064】
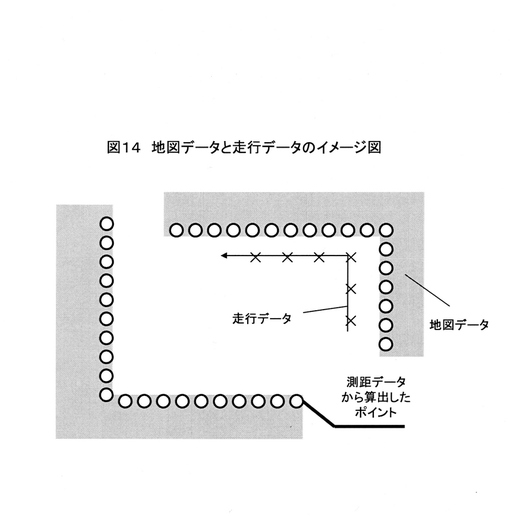
図14は地図データと走行データのイメージを示す図である。図14において、「○」で表現しているのが測距データ213から算出されたポイントであり、それらの点が複数集まった結果が地図データ212として記録されている。保守端末104から転送されてくる走行データ211は、「×」で表現されている。このような走行データ211を利用することによって、自律移動型電波測定ロボット100は、毎日同じルートを通過しながら電波計測を行うことが可能となる。
【0065】
走行データ211は、進行方向を地図データ212に基づいて指定するものであり、自律移動型電波測定ロボット100の進行速度及び電波の測定頻度は、すでに説明したように予め決定されて実行される。測定されたデータは、測定を開始した座標(x、y)を基準点とし、その基準点を中心としてある一定の大きさの格子により地図データを区切り、1つの格子内で計測されたデータを同一ポイントで計測されたデータであるとされる。このように、同一のポイントで計測したこととした多数のデータを使用することにより、測定誤差を軽減し、より信頼できるデータを採取することが可能になる。
【0066】
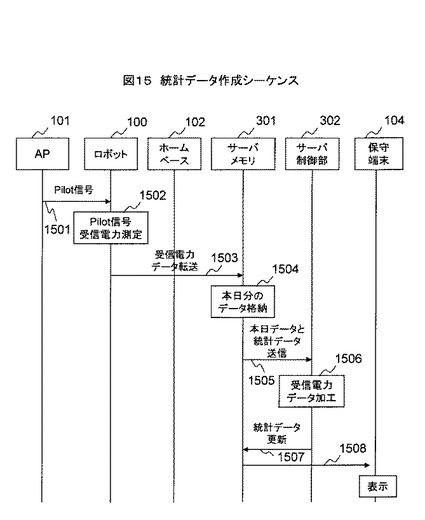
図15は自律移動型電波測定ロボット100から受信電力データをサーバ103に送信し、サーバ103が統計データを作成する処理動作を説明するシーケンスチャートであり、次に、これについて説明する。
【0067】
(1)AP101からのPilot 信号を受信した自律移動型電波計測ロボット100は、Pilot 信号の受信電力測定を行い、その測定結果を前述で説明した方法によって自身のメモリ201に受信電力データ210として格納する(ステップ1501、1502)。
【0068】
(2)その後、自律移動型電波計測ロボット100は、メモリ201に格納した受信電力データ210をホームベース102を介してサーバ103に転送する(ステップ1503)。
【0069】
(3)サーバ103は、受信電力データ210が自律移動型電波計測ロボット100から転送されてくると、まず、本日分の受信電力データ304として自身のメモリ301に格納し、格納の後、本日の受信電力データ304と昨日までの統計受信電力データ307とをメモリ301から制御部302に送信する(ステップ1504、1505)。
【0070】
(4)サーバ103の制御部302は、データを受信すると受信電力データ304を、昨日までの統計受信電力データ307に加え、正規化する加工を行うことにより、本日までの統計受信電力データを算出する(ステップ1506)。
【0071】
(5)サーバ103の制御部302は、本日までの統計受信電力データの計算を終了すると、算出した本日までの統計受信電力データを再びメモリ302に転送し、統計受信電力データ307を更新する(ステップ1507)。
【0072】
(6)前述の更新した統計受信電力データ307は、保守端末104の画面に表示することが可能であり、これにより、管理者等の操作者は、日々の統計データを閲覧することができる(ステップ1508)。
【0073】
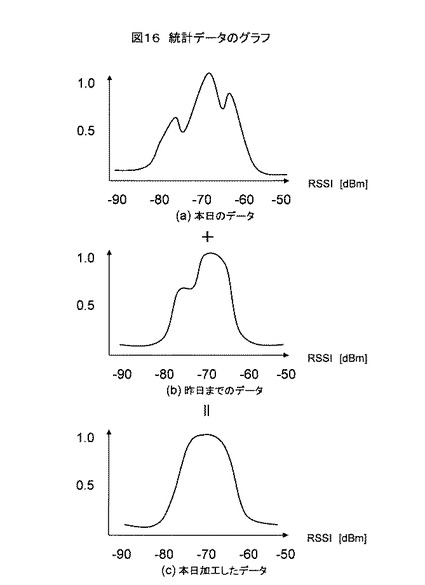
図16はサーバの制御部302が受信電力データを加工して得た統計受信電力データのグラフを示す図である。
【0074】
図16(a)に示す本日のデータのグラフは、サーバ103のメモリ301に格納された当日の受信電力データ304をグラフ化したもので、例えば、図14に示した走行データ211のある1点の「×」ポイントにおいて複数回測定したるPilot 信号の受信電力の大きさを示すRSSI値を横軸とし、測定されたRSSI値毎の測定回数を縦軸にプロットした測定結果のグラフである。このグラフは、RSSI値毎の回数の最大値を“1”として正規化されている。
【0075】
図16(b)に示す昨日までの統計データのグラフは、日々同一のポイントで計測したデータを加工して統計化したものであり、サーバ103のメモリ301に統計受信電力データ307として格納されているデータの統計値をグラフ化したものである。このグラフも、RSSI値毎の回数の最大値を“1”として正規化されている。
【0076】
図16(c)に示す本日加工したデータのグラフは、図16(a)のグラフのデータと図16(b)グラフのデータを足し合わせて、前述したと同様に正規化を行ってグラフ化したものであり、このグラフにおけるデータは、サーバ103のメモリ301に統計受信電力データ307として格納される。これにより、統計受信電力データ307は、日々更新されていくことになり、次第に信頼性の高いデータとなる。
【0077】
前述した本発明の実施形態によれば、レーダーを用いて自身の現在位置データと地図データとを自律的に作成し、保守端末から保守者に走行ルートを指定させることができるため、自律的に走行しながら屋内の電波環境を計測することができ、その際、電波の不感地帯に入ったとき、自身の推進速度を落とすことによって、移動する経路上の距離に対する測定回数を増加させることができるので、電波の不感が一次的なものか定常的なものかを識別することができる。
【0078】
また、本発明の実施形態によれば、複数の日にわたって測定を実施する際に、同一時刻、同一地点での測定値を得ることが可能になり、日々採取する測定データ値の統計化を行うことにより、より信頼性の高い電波環境データを採取することができる。
【符号の説明】
【0079】
100 自律移動型電波測定ロボット
101 AP(アクセスポイント)
102 ホームベース
103 サーバ
104 保守端末
200、302 制御部
201、301 メモリ
202 電波測定IF
203 受信電力測定部
204 ホームベース無線IF
205 SW
206 ホームベース有線IF
207 レーダー測距センサ
208 車輪駆動部
209 モータ
210、304 受信電力データ
211、306 走行データ
212、305 地図データ
213 測距データ
214 現在位置データ
215 受信電力判定部
216 モータ回転制御部
217 地図データ作成部
218 現在位置計算部
300 ホームベースIF
303 保守端末IF
307 統計受信電力データ
308 受信電力データ加工部
【技術分野】
【0001】
本発明は、電波計測システムに係り、特に、屋内エリアの地図データを作成し、作成した地図データによる屋内エリアの範囲内を移動しながら電波環境データを計測する電波計測システムに関する。
【背景技術】
【0002】
近年の移動体無線通信の技術は、ユーザの利用場所や移動する速度の制約をなくし、自由にネットワークへの接続を可能としたユビキタスネットワークへの展開が期待されている。一般に、移動体無線通信は、鉄塔や高層ビルの上から電波を放射することによって通信を確立させているが、電波の特性上、鉄塔や高層ビルの上からの電波の放射だけでは屋内空間や地下空間までカバーすることができない。この問題を解決するため、従来の移動体無線通信システムは、電波の届きにくい場所に、小型の無線基地局を設置し、無線通信の品質安定を確保すると同時に、通信エリアの拡大を図っている。しかし、それでも屋内エリアには、電波の不感地帯が存在することが避けられない。屋内エリアで良好な電波環境を構築するためには、エリア内の電波環境データを計測し、最適な場所に小型基地局を設置する必要がある。
【0003】
エリア内の電波環境データの計測方法に関する従来技術として、人手による方法、あるいは、特許文献1等に記載された技術を用いる方法が知られている。この従来技術は、予め地図データが与えられていて、無線通信によって操作可能な範囲内において自律移動しながら電波環境データを計測するロボットを用いるというものである。また、自己位置を検知しながら自律的に移動可能なロボットに関する技術が、例えば、特許文献2等に記載されて知られている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2008−90575号公報
【特許文献2】特開2008−250906号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
前述した従来の人手作業による計測方法は、限られた作業時間内で作業者が測定器を持ち回りながら計測を行うことになるため、得られた測定データが瞬時的な値であるのか、屋内構造に起因した不感地帯のものであるのかが明確にならず、また、サンプル数も少ないため、得られたデータも信頼性の低いものである。また、人手による方法は、計測のために多くの人件費を要するものである。
【0006】
一方、特許文献1に記載の従来技術は、無線通信によって自律移動が可能なロボットを使用して電波環境の計測を行っているため、人手による計測に比べると同一の測定条件での計測を複数回にわたって行うことができ、信頼性の高いデータを得ることができる。
【0007】
しかし、この従来技術は、無線電波の届かない領域でのロボットの操作が不可能となり、計測範囲が限られてしまうという問題点を有し、また、ノイズ等の何らかの影響により無線通信が不可能になると計測が不可能になってしまうという問題点を生じる。また、この従来技術は、計測エリアの地図データを事前に作成し、ロボットにダウンロードしておかなければ動作することができないという問題点を有しており、さらに、電波測定を行う測定ポイントに赤外線センサに反応するマーキングを設置する必要があり、エリア全体の細かな箇所にロボットを行かせることが困難であり、細かな個所の計測を行うことができないという問題点を有している。
【0008】
また、前述の従来技術は、前述したようなマーキングを使用しない場合、地図データを格子状に区切り、格子点毎に電波測定を行うようにすることもできるが、この場合、計測ポイントを細かい間隔で設定することができないという問題点を生じてしまう。また、前述の従来技術は、重点的に測定したいエリアがある場合、そのエリアを保守端末から指定することができるが、測定ポイントを数ポイントしか指定することができないため、エリア内を細かく電波測定したい場合、人手によってロボットを誘導してその穴を埋めていかなければならないという問題点をも有している。そして、前述の従来技術は、同一の測定ポイントでの測定回数も一律に10回程度の少ない回数に決められているので、無線電波環境が悪いポイントにおける測定精度のばらつきを吸収することができないため、効率よく屋内の電波環境を知ることができないという問題点を有している。
【0009】
本発明の目的は、前述したような従来技術の問題点を解決し、屋内エリアの地図データを作成し、作成した地図データに基づいて管理者により指定された経路を自律的に移動しながら電波環境データを測定する電波計測システムを提供することにある。
【課題を解決するための手段】
【0010】
本発明によれば前記目的は、屋内エリアを移動しながら電波環境データを計測するロボットと、該ロボットとの間で通信可能に設けられたサーバとを備える電波計測システムにおいて、前記ロボットは、周囲の壁面までの距離を方位毎に測距する測距手段と、前記屋内エリア内に設置されたアクセスポイントからの電波の受信電力を予め定めた一定の時間間隔で測定する受信電力測定手段と、該受信電力測定手段で測定された受信電力データの大きさを判定する受信電力判定手段と、前記測距手段により測距された測距データから前記屋内エリアの地図データを作成する地図データ作成手段と、前記サーバから与えられる走行データにより指定される走行経路に沿って自律的に自ロボットを走行させる走行手段と、前記受信電力判定手段の判定結果に基づいて前記走行手段を構成するモータの回転速度を制御して自ロボットの移動速度を制御するモータ回転制御手段とを備えたことにより達成される。
【発明の効果】
【0011】
本発明によれば、屋内エリアの地図データを作成して、屋内の電波環境を自律的に、かつ、効率的に計測することができる。
【図面の簡単な説明】
【0012】
【図1】本発明の一実施形態による電波計測システムの構成を示すブロック図である。
【図2】自律移動型電波計測ロボットの構成を示すブロック図である。
【図3】サーバの構成を示すブロック図である。
【図4】本発明の実施形態による電波計測システムでの処理動作の概要を説明するフローチャートである。
【図5】自律移動型電波測定ロボットが自身の走行速度を制御する処理動作を説明する速度制御シーケンスチャートである。
【図6】受信電力判定部での処理動作である図5に示すフローのステップ504、505での処理の詳細を説明するフローチャートである。
【図7】Pilot 信号の受信電力に応じたモータ回転制御部からのモータ回転制御の速度変化を説明する図である。
【図8】自律移動型電波測定ロボットが地図データを作成する処理動作を説明するシーケンスチャートである。
【図9】自律移動型電波測定ロボットが自身の居る現在位置データを作成する処理動作を説明するシーケンスチャートである。
【図10】測距データの取得イメージと測距データの格納イメージと示す図である。
【図11】自律移動型電波測定ロボットから地図データをサーバに格納する処理動作を説明するシーケンスチャートである。
【図12】保守端末から入力された走行データを自律移動型電波測定ロボットに通知する処理動作を説明するシーケンスチャートである。
【図13】現在位置データと受信電力(RSSI)データとを日時の情報と共にメモリに格納したデータ格納イメージを示す図である。
【図14】地図データと走行データとのイメージを示す図である。
【図15】自律移動型電波測定ロボットから受信電力データをサーバに送信し、サーバが統計データを作成する処理動作を説明するシーケンスチャートである。
【図16】サーバの制御部が受信電力データを加工して得た統計受信電力データのグラフを示す図である。
【発明を実施するための形態】
【0013】
以下、本発明による電波計測システムの実施形態を図面により詳細に説明する。
【0014】
図1は本発明の一実施形態による電波計測システムの構成を示すブロック図である。
【0015】
本発明の一実施形態による電波計測システムは、電波の状況を測定しようとしている屋内エリアに、屋内型小型基地局装置としてのアクセスポイント(以下、APという)101と、このアクセスポイント101から送信される電波状況を調査する自律的に移動することが可能な電波計測装置としての自律移動型電波測定ロボット100と、この自律移動型電波測定ロボット100が自身の持つバッテリーを充電するするためのホームベース102とを配置し、屋内エリアの外部にネットワークを介してホームベース102に接続されるサーバ103と、このサーバ103に接続されて、管理者が使用する保守端末104とを備えて構成されている。なお、AP101は、ネットワークを介して情報サービス等を行う外部装置に接続される。
【0016】
前述において、自律移動型電波測定ロボット100は、自身の持つバッテリーの残量が低下すると、ホームベース102に移動してバッテリーへの充電を開始する。ホームベース102は、バッテリーに対する充電機能と、充電時に自律移動型電波測定ロボット100が採取した電波の計測値、ここでは、AP101が送信するパイロット信号の受信電力の強度データを受け取り、ネットワークを経由してサーバ103へ転送する機能とを有している。また、自律移動型電波測定ロボット100とホームベース102とは、無線インターフェイスを具備しており、自律移動型電波測定ロボット100が移動中にも、無線通信によって相互に情報の授受をする機能をも有している。サーバ103は、自律移動型電波測定ロボット100から受け取った受信電力の強度データを日々蓄積する機能と、そのデータを統計計算する機能とを有している。その結果は、保守端末104から保守者が閲覧することができる。
【0017】
なお、前述の自律移動型電波測定ロボット100は、車輪により床面上を自律的に移動可能とされているので、その背面に床を掃除する手段を具備させることもできる。
【0018】
図2は自律移動型電波計測ロボット100の構成を示すブロック図である。
【0019】
自律移動型電波測定ロボット100は、アクセスポイント101からのPilot 信号を受信する機能を持つ電波測定IF202と、受信したPilot 信号の受信電力の強度を予め定めた一定時間毎に測定する機能を持つ受信電力測定部203と、各種データを格納するメモリ201と、移動用の車輪の駆動部208と、駆動用のモータ209と、後述するような制御機能を有する制御部200と、屋内の壁面までの距離を測定するレーダー測距センサ207と、ホームベースのIFと接続するためのホームベース無線IF204及びホームベース有線IF206と、これらのIFを切り替えるスイッチ205とを備えて構成される。
【0020】
そして、メモリ201には、測定されたPilot 信号の受信電力データ210、レーダー測距センサ207による測距データ213、保守端末104から与えられる走行経路である走行データ211、制御部200が生成した地図データ212及び現在位置データ214が格納される。また、制御部200は、レーダー測距センサ207が測定した測距データ214に基づいて地図を作成する地図データ作成部217と、地図データ213及び測距データ214を用いて自ロボットの現在位置を算出する現在位置計算部218と、受信電力データ210の大きさを判定する受信電力判定部215と、受信電力の大きさに基づいてモータ209の回転数を制御するモータ回転制御部216とを備えて構成されている。
【0021】
さらに、自律移動型電波計測ロボット100は、自律的な移動のため、モータ209と車輪駆動部208とによる走行部を有しており、モータ回転制御部216から制御され、また、その指示により指定される速度に従って、走行データ211により指定される走行経路上を指定された速度で移動しながら受信電力の測定を行う。
【0022】
図3はサーバ103の構成を示すブロック図である。
【0023】
サーバ103は、ホームベース102とネットワークとを介して自律移動型電波測定ロボット100との間で情報の授受を行うホームベースIF300と、自律移動型電波測定ロボット100が採取した受信電力データ304、地図データ305、保守端末303より指示される走行データ306を格納すると共に、制御部302によって計算された統計受信電力データ307を保持しておく機能をもつメモリ301と、受信電力データ304と統計受信電力データ307とを加工し、統計受信電力データ307を作成、更新する受信電力データ加工部308を有する制御部302と、保守端末104から指示を受ける機能を持つ保守端末IF303とにより構成されている。
【0024】
図4は本発明の実施形態による電波計測システムでの処理動作の概要を説明するフローチャートであり、次に、これについて説明する。ここで説明する処理は、自律移動型電波測定ロボット100が、起動された後に距離データ213を収集して、その距離データ213に基づいて地図データ212を作成し、作成した地図データ212をもとに電波計測を行い、計測結果をサーバ103に送信して記録させる処理である。なお、ここで説明するフローにおける各処理の詳細については、図5〜図16を参照して後述する。
【0025】
(1)自律移動型電波計測ロボット100は、電波環境を計測する屋内に設置されて、電波計測の処理の処理を開始すると、電波計測に先立って周囲の壁面までの距離を測定して測距データを取得し、取得した測距データを用いて地図データを作成、記録し、その地図データをサーバ103に送信する(ステップ401、402)。
【0026】
(2)次に、自律移動型電波計測ロボット100は、自ロボットが走行するルートである走行データがメモリ201内に格納されておらず、走行データの設定が必要か否かを判定し、走行データの設定が必要であった場合、サーバ103に送信した地図データに基づいて操作者に走行データ211を作成してもらい、その走行データ211をサーバから受け取って自ロボットのメモリ201内に格納する(ステップ403、404)。
【0027】
(3)ステップ403の判定で、走行データ211がすでにメモリ201内に格納されていて、走行データの設定が不必要であった場合、あるいは、ステップ404の処理で走行データをサーバから受け取ってメモリ内に格納した後、自律移動型電波計測ロボット100は、走行データに従って屋内を移動しながら電波の測定を開始し、予め定めた一定時間毎に、自ロボット100の現在位値と受信電力とを測定し、測定した現在位値し受信電力とのデータを自ロボット内のメモリ201に格納していく(ステップ405)。
【0028】
(4)自律移動型電波計測ロボット100は、電波計測の途中で、あるいは、ホームベース102に帰還したとき、メモリ201に格納していた現在位置データ214及び受信電力データ210をサーバ103に送信する。サーバ103は、受け取った受信電力データから日々の統計受信電力データを作成する(ステップ406、407)。
【0029】
図5は自律移動型電波測定ロボット100が自身の走行速度を制御する処理動作を説明する速度制御シーケンスチャートであり、次に、これについて説明する。自律移動型電波測定ロボット100は、自律的に移動することができるものであり、その速度は、アクセスポイント101から送信されるPilot 信号の受信強度により制御される。
【0030】
(1)AP101は、屋内エリアに対してPilot 信号を放射しており、自律移動型電波測定ロボット100の受信電力測定部203は、そのPilot 信号を受信するとPilot 信号の受信電力の測定を行う(ステップ501、502)。
【0031】
(2)受信電力測定部203は、測定された受信電力データを、メモリ201に受信電力データ211として格納すると同時に、制御部200に受信電力をメモリ201に格納したことを通知する(ステップ503)。
【0032】
(3)受信電力格納通知信号を受け取った制御部200の受信電力判定部215は、受信電力を判定すると共に、その電力に従ったロボットの走行速度を判定し、その判定結果に従って、モータ回転制御部216にモータ209に対して回転速度を制御する制御情報(速度指定情報)を送信する(ステップ504、505)。
【0033】
(4)モータ回転制御部216は、受け取ったロボットの走行速度によりモータ209の回転速度を設定してモータ209を制御し、モータ209は、指示された速度に設定されてロボット本体を走行させる(ステップ506)。
【0034】
図6は受信電力判定部215での処理動作である図5に示すフローのステップ504、505での処理の詳細を説明するフローチャートであり、次に、これについて説明する。
【0035】
(1)自律移動型電波測定ロボット100は、電源がONとされると、自ロボットの走行速度を変更する制御に使用するPilot 信号の受信電力RSSIの大きさの閾値Th、ロボットの速度V1、V2の初期設定を行うことを操作者に求める。この初期設定は、ロボットの外側に設定ボタンを設けて操作させる方法や保守端末104からホームベース102を経由して設定させるようにすることもできる(ステップ601)。
【0036】
(2)自律移動型電波測定ロボット100は、初期設定が完了すると待ち状態になる。そして、受信電力判定部215は、受信電力格納通知を受信すると、メモリ201に格納されている受信電力データ210を読み出し、その受信電力がステップ601の処理で予め設定された閾値Thより大きいか否かを比較判定する(ステップ602〜604)。
【0037】
(3)受信電力判定部215は、ステップ604での比較判定の結果、受信電力が閾値より大きかった場合、ロボットの走行速度をV1とするように指定し、モータ回転制御部216にモータ209の制御を行うように速度指定通知を行う。この通知の後、自律移動型電波測定ロボット100は、ステップ602からの処理に戻って待ち状態となる(ステップ605、606)。
【0038】
(4)受信電力判定部215は、ステップ604での比較判定の結果、受信電力が閾値より小さかった場合、ロボットの走行速度をV2とするように指定し、モータ回転制御部216にモータ209の制御を行うように速度指定通知を行う。この通知の後、自律移動型電波測定ロボット100は、ステップ602からの処理に戻って待ち状態となる(ステップ607、608)。
【0039】
前述の処理で指定した自律移動型電波測定ロボット100に対する走行速度のV1、V2は、V1がV2より大きく設定される。これにより、Pilot 信号の受信電力が小さく電波の不感地帯に入ったようなとき、ロボット自身の推進速度を落とすことができ、一定時間間隔で行っている電力測定の移動する経路上の距離に対する回数を増加させることができる。
【0040】
図7はPilot 信号の受信電力に応じたモータ回転制御部216からのモータ回転制御の速度変化を説明する図である。図7(a)には、Pilot 信号の受信電力RSSIの大きさに対する走行しているロボットの時間経過による変化を示しており、また、図7(b)には、受信電力判定部215がモータ回転制御部216に送信するモータ209に対する速度指定通知の時間経過による変化を示している。
【0041】
図7(a)に示すように、自律移動型電波測定ロボット100は、走行しながらPilot 信号の受信電力RSSIの大きさを計測しており、受信電力RSSIの大きさが、ある時刻700で閾値Thを下まわると、図7(b)に示すように、モータ回転制御部216に送信するモータ209に対する速度指定通知の速度をV1からV2に変化させる。また、しばらくして、ある時刻702で受信電力RSSIの大きさが閾値Thより大きくなると、モータ回転制御部216に送信するモータ209に対する速度指定通知の速度をV2からV1に変化させる。
【0042】
本発明の実施形態は、前述のような動作を行うことにより、受信電力の低いエリアに自律移動型電波測定ロボット100が進んだ場合、自身の速度を設定された小さな速度V2として、測定を続けていくことになる。なお、電波測定タイミングは、すでに説明したように、一定時間間隔に予め設定されていて不変であり、自律移動型電波測定ロボット100の推進速度が低ければ低いほど測定回数は増えていく。この機能によって、受信電力の小さい電波の不感地帯の受信電力データ210の取得回数を増やし、サンプル数を増やすことができる。
【0043】
自律移動型電波測定ロボット100は、屋内エリアの地図データ212を自動的に作成し自身の現在地を認識した上で、Pilot 信号の受信電力の大きさを測定しており、次に、地図データの作成と現在位置の認識との方法を説明する。
【0044】
図8は自律移動型電波測定ロボット100が地図データを作成する処理動作を説明するシーケンスチャートであり、次に、これについて説明する。
【0045】
(1)自律移動型電波測定ロボット100は、周囲の環境を認識するための測距センサ207を具備している。測距センサ207は、周囲の壁までの距離を計測し、メモリ201に測距データ213として格納すると同時に、制御部200に測距データをメモリ201に格納したことを通知する(ステップ801、802)。
【0046】
(2)測距データ格納の通知を受けた制御部200の地図データ作成部217は、メモリ201から測距データ213を読み出し、地図データの作成を開始する。測距データ213は、一定時間毎に測定されて取得されれているので、地図データ作成部217は、その複数の測距データ213から地図データ212を作成し、地図データ212が完成するとメモリ201へ地図データ212として格納する(ステップ803、804)。
【0047】
図9は自律移動型電波測定ロボット100が自身の居る現在位置データを作成する処理動作を説明するシーケンスチャートであり、次に、これについて説明する。
【0048】
(1)自律移動型電波測定ロボット100は、周囲の環境を認識するための測距センサ207を具備している。測距センサ207は、周囲の壁までの距離を計測し、メモリ201に測距データ213として格納すると同時に、制御部200に測距データをメモリ201に格納したことを通知する(ステップ901、902)。
【0049】
(2)測距データ格納の通知を受けた制御部200の現在位置計算部218は、メモリ201から地図データ212と測距データ213とを読み出し、最新の測距データを元に自身の現在位置を計算し、現在位置データを作成後、メモリ200に現在位置データ214として格納する(ステップ903〜905)。
【0050】
図10は測距データの取得イメージと測距データの格納イメージとを示す図であり、次に、図10を参照して、自律移動型電波測定ロボット100が周囲の壁までの距離を計測する方法を説明する。
【0051】
図10(a)に示すように、ロボットが居る地点の座標を(x、y)と仮定し、その地点で360度ロボットが回転し、測距センサ207は、ある一定角度毎に瞬時パルスを発射し、反射波を受けるまでの時間から距離d1〜dnを計算する。このような測距データは、図10(b)に示すように、ロボットが居る地点の座標(x、y)と、図示していないが方位の情報と、座標を(x、y)からの距離d1〜dnの組としてメモリ201に格納される。
【0052】
周囲からのパルスの反射により計算された距離により決まるポイントは、前述の座標(x、y)を基準とした点座標として記録されていくため、この点座標は、ロボットが測定を行うたびに多くなっていく。このような距離データの点座標のデータは、ICPアルゴリズム用いて平均化され、これを用いて地図データを作成することができる。
【0053】
前述したような点座標データの計算方法の詳細については、特許文献2等により詳述されているので、ここでの説明は省略する。また、前述の測距データを取得するための測距センサ207は、赤外線、可視光を利用したものであってよい。
【0054】
図11は自律移動型電波測定ロボット100から地図データをサーバ103に格納する処理動作を説明するシーケンスチャートであり、次に、これについて説明する。
【0055】
(1)自律移動型電波測定ロボット100は、地図データ作成部217が前述した方法により地図データ212を作成してメモリ201に格納すると、ホームベース102に対して、無線通信によって、または、充電を行うときに有線通信によって地図データを転送する(ステップ1101)。
【0056】
(2)ホームベース102は、自律移動型電波測定ロボット100から地図データ212を受信すると、その地図データ212をサーバ103へ転送する(ステップ1102)。
【0057】
(3)サーバ103は、地図データ212を受信すると、受信した地図データを一旦自身が持つメモリ301に地図データ305として保存してから保守端末104へ送信して表示させる(ステップ1103〜1105)。
【0058】
図12は保守端末104から入力された走行データを自律移動型電波測定ロボット100に通知する処理動作を説明するシーケンスチャートであり、次に、これについて説明する。
【0059】
(1)操作者は、図11に示すフローにより説明した処理により、保守端末104に表示された地図データを見て、自律移動型電波測定ロボット100に電波状態を計測させる走行経路を決定し、その走行経路を走行データとして作成し、作成した走行データを保守端末104に入力してサーバ103に送信させる(ステップ1201、1202)。
【0060】
(2)保守端末104から走行データを受け取ったサーバ103は、その走行データをホームベース102に転送し、ホームベース102も、同様に、受け取った走行データを無線IF204を介して、または、充電時に有線IF206を介して自律移動型電波測定ロボット100に転送する(ステップ1203、1204)。
【0061】
(3)自律移動型電波測定ロボット100は、走行データを受信すると、メモリ201に走行データ211として記憶し、この走行データに指定されたルートを経由するように走行動作する。
【0062】
図13は現在位置データ215と受信電力(RSSI)データ211とを日時の情報と共にメモリ201に格納したデータ格納イメージを示す図である。
【0063】
自律移動型電波測定ロボット100のメモリ201には、図13に示すように、Pilot 信号の受信電力を測定した日付・日時の情報と、X軸及びY軸の座標によるPilot 信号の受信電力を測定した位置の情報である現在位置データ215と、Pilot 信号の受信電力の大きさを示すRSSI値の情報とを組とした複数のレコードが格納されている。このデータは、複数の日にわたって取得され、自律移動型電波測定ロボット100からホームベース102を介してサーバ103に日々記録される。
【0064】
図14は地図データと走行データのイメージを示す図である。図14において、「○」で表現しているのが測距データ213から算出されたポイントであり、それらの点が複数集まった結果が地図データ212として記録されている。保守端末104から転送されてくる走行データ211は、「×」で表現されている。このような走行データ211を利用することによって、自律移動型電波測定ロボット100は、毎日同じルートを通過しながら電波計測を行うことが可能となる。
【0065】
走行データ211は、進行方向を地図データ212に基づいて指定するものであり、自律移動型電波測定ロボット100の進行速度及び電波の測定頻度は、すでに説明したように予め決定されて実行される。測定されたデータは、測定を開始した座標(x、y)を基準点とし、その基準点を中心としてある一定の大きさの格子により地図データを区切り、1つの格子内で計測されたデータを同一ポイントで計測されたデータであるとされる。このように、同一のポイントで計測したこととした多数のデータを使用することにより、測定誤差を軽減し、より信頼できるデータを採取することが可能になる。
【0066】
図15は自律移動型電波測定ロボット100から受信電力データをサーバ103に送信し、サーバ103が統計データを作成する処理動作を説明するシーケンスチャートであり、次に、これについて説明する。
【0067】
(1)AP101からのPilot 信号を受信した自律移動型電波計測ロボット100は、Pilot 信号の受信電力測定を行い、その測定結果を前述で説明した方法によって自身のメモリ201に受信電力データ210として格納する(ステップ1501、1502)。
【0068】
(2)その後、自律移動型電波計測ロボット100は、メモリ201に格納した受信電力データ210をホームベース102を介してサーバ103に転送する(ステップ1503)。
【0069】
(3)サーバ103は、受信電力データ210が自律移動型電波計測ロボット100から転送されてくると、まず、本日分の受信電力データ304として自身のメモリ301に格納し、格納の後、本日の受信電力データ304と昨日までの統計受信電力データ307とをメモリ301から制御部302に送信する(ステップ1504、1505)。
【0070】
(4)サーバ103の制御部302は、データを受信すると受信電力データ304を、昨日までの統計受信電力データ307に加え、正規化する加工を行うことにより、本日までの統計受信電力データを算出する(ステップ1506)。
【0071】
(5)サーバ103の制御部302は、本日までの統計受信電力データの計算を終了すると、算出した本日までの統計受信電力データを再びメモリ302に転送し、統計受信電力データ307を更新する(ステップ1507)。
【0072】
(6)前述の更新した統計受信電力データ307は、保守端末104の画面に表示することが可能であり、これにより、管理者等の操作者は、日々の統計データを閲覧することができる(ステップ1508)。
【0073】
図16はサーバの制御部302が受信電力データを加工して得た統計受信電力データのグラフを示す図である。
【0074】
図16(a)に示す本日のデータのグラフは、サーバ103のメモリ301に格納された当日の受信電力データ304をグラフ化したもので、例えば、図14に示した走行データ211のある1点の「×」ポイントにおいて複数回測定したるPilot 信号の受信電力の大きさを示すRSSI値を横軸とし、測定されたRSSI値毎の測定回数を縦軸にプロットした測定結果のグラフである。このグラフは、RSSI値毎の回数の最大値を“1”として正規化されている。
【0075】
図16(b)に示す昨日までの統計データのグラフは、日々同一のポイントで計測したデータを加工して統計化したものであり、サーバ103のメモリ301に統計受信電力データ307として格納されているデータの統計値をグラフ化したものである。このグラフも、RSSI値毎の回数の最大値を“1”として正規化されている。
【0076】
図16(c)に示す本日加工したデータのグラフは、図16(a)のグラフのデータと図16(b)グラフのデータを足し合わせて、前述したと同様に正規化を行ってグラフ化したものであり、このグラフにおけるデータは、サーバ103のメモリ301に統計受信電力データ307として格納される。これにより、統計受信電力データ307は、日々更新されていくことになり、次第に信頼性の高いデータとなる。
【0077】
前述した本発明の実施形態によれば、レーダーを用いて自身の現在位置データと地図データとを自律的に作成し、保守端末から保守者に走行ルートを指定させることができるため、自律的に走行しながら屋内の電波環境を計測することができ、その際、電波の不感地帯に入ったとき、自身の推進速度を落とすことによって、移動する経路上の距離に対する測定回数を増加させることができるので、電波の不感が一次的なものか定常的なものかを識別することができる。
【0078】
また、本発明の実施形態によれば、複数の日にわたって測定を実施する際に、同一時刻、同一地点での測定値を得ることが可能になり、日々採取する測定データ値の統計化を行うことにより、より信頼性の高い電波環境データを採取することができる。
【符号の説明】
【0079】
100 自律移動型電波測定ロボット
101 AP(アクセスポイント)
102 ホームベース
103 サーバ
104 保守端末
200、302 制御部
201、301 メモリ
202 電波測定IF
203 受信電力測定部
204 ホームベース無線IF
205 SW
206 ホームベース有線IF
207 レーダー測距センサ
208 車輪駆動部
209 モータ
210、304 受信電力データ
211、306 走行データ
212、305 地図データ
213 測距データ
214 現在位置データ
215 受信電力判定部
216 モータ回転制御部
217 地図データ作成部
218 現在位置計算部
300 ホームベースIF
303 保守端末IF
307 統計受信電力データ
308 受信電力データ加工部
【特許請求の範囲】
【請求項1】
屋内エリアを移動しながら電波環境データを計測するロボットと、該ロボットとの間で通信可能に設けられたサーバとを備える電波計測システムにおいて、
前記ロボットは、周囲の壁面までの距離を方位毎に測距する測距手段と、前記屋内エリア内に設置されたアクセスポイントからの電波の受信電力を予め定めた一定の時間間隔で測定する受信電力測定手段と、該受信電力測定手段で測定された受信電力データの大きさを判定する受信電力判定手段と、前記測距手段により測距された測距データから前記屋内エリアの地図データを作成する地図データ作成手段と、前記サーバから与えられる走行データにより指定される走行経路に沿って自律的に自ロボットを走行させる走行手段と、前記受信電力判定手段の判定結果に基づいて前記走行手段を構成するモータの回転速度を制御して自ロボットの移動速度を制御するモータ回転制御手段とを備えたことを特徴とする電波計測システム。
【請求項2】
前記モータ回転制御手段は、前記受信電力判定手段が判定した受信電力の大きさが予め定めた閾値より大きい場合に、ロボットの走行速度が予め定めた走行速度V1となるようにモータの速度を制御し、受信電力の大きさが予め定めた閾値より小さい場合に、ロボットの走行速度が予め定めた前記走行速度V1より小さい予め定めたV2となるようにモータの速度を制御することを特徴とする請求項1記載の電波計測システム。
【請求項3】
前記ロボットは、前記受信電力測定手段が測定した受信電力データ及び前記地図データ作成手段が作成した地図データを前記サーバに送信する通信手段を有し、
前記サーバは、受信した前記地図データを操作者の端末に表示して操作者に走行データを作成させ、作成された走行データを前記ロボットに送信することを特徴とする請求項1または2記載の電波計測システム。
【請求項4】
前記サーバは、受信した受信電力データを統計処理して統計受信電力データとする受信電力データ加工手段を有することを特徴とする請求項3記載の電波計測システム。
【請求項5】
前記屋内エリア内に前記ロボットのホームベースが配置されており、該ホームベースは、前記ロボットと前記サーバとの間の通信を中継する手段と、ロボットが有するバッテリーへの充電手段とを備えることを特徴とする請求項1記載の電波計測システム。
【請求項1】
屋内エリアを移動しながら電波環境データを計測するロボットと、該ロボットとの間で通信可能に設けられたサーバとを備える電波計測システムにおいて、
前記ロボットは、周囲の壁面までの距離を方位毎に測距する測距手段と、前記屋内エリア内に設置されたアクセスポイントからの電波の受信電力を予め定めた一定の時間間隔で測定する受信電力測定手段と、該受信電力測定手段で測定された受信電力データの大きさを判定する受信電力判定手段と、前記測距手段により測距された測距データから前記屋内エリアの地図データを作成する地図データ作成手段と、前記サーバから与えられる走行データにより指定される走行経路に沿って自律的に自ロボットを走行させる走行手段と、前記受信電力判定手段の判定結果に基づいて前記走行手段を構成するモータの回転速度を制御して自ロボットの移動速度を制御するモータ回転制御手段とを備えたことを特徴とする電波計測システム。
【請求項2】
前記モータ回転制御手段は、前記受信電力判定手段が判定した受信電力の大きさが予め定めた閾値より大きい場合に、ロボットの走行速度が予め定めた走行速度V1となるようにモータの速度を制御し、受信電力の大きさが予め定めた閾値より小さい場合に、ロボットの走行速度が予め定めた前記走行速度V1より小さい予め定めたV2となるようにモータの速度を制御することを特徴とする請求項1記載の電波計測システム。
【請求項3】
前記ロボットは、前記受信電力測定手段が測定した受信電力データ及び前記地図データ作成手段が作成した地図データを前記サーバに送信する通信手段を有し、
前記サーバは、受信した前記地図データを操作者の端末に表示して操作者に走行データを作成させ、作成された走行データを前記ロボットに送信することを特徴とする請求項1または2記載の電波計測システム。
【請求項4】
前記サーバは、受信した受信電力データを統計処理して統計受信電力データとする受信電力データ加工手段を有することを特徴とする請求項3記載の電波計測システム。
【請求項5】
前記屋内エリア内に前記ロボットのホームベースが配置されており、該ホームベースは、前記ロボットと前記サーバとの間の通信を中継する手段と、ロボットが有するバッテリーへの充電手段とを備えることを特徴とする請求項1記載の電波計測システム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図11】
【図12】
【図13】
【図15】
【図16】
【図10】
【図14】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図11】
【図12】
【図13】
【図15】
【図16】
【図10】
【図14】
【公開番号】特開2012−173051(P2012−173051A)
【公開日】平成24年9月10日(2012.9.10)
【国際特許分類】
【出願番号】特願2011−33596(P2011−33596)
【出願日】平成23年2月18日(2011.2.18)
【出願人】(000005108)株式会社日立製作所 (27,607)
【Fターム(参考)】
【公開日】平成24年9月10日(2012.9.10)
【国際特許分類】
【出願日】平成23年2月18日(2011.2.18)
【出願人】(000005108)株式会社日立製作所 (27,607)
【Fターム(参考)】
[ Back to top ]