
電流測定方法および電流測定装置
【課題】本発明は、電気負荷に対して所望の量だけ電流を供給することを目的とする。
【解決手段】制御ユニットにより、少なくとも1つの制御可能なスイッチング素子に作用する制御信号のクロックパターンを形成し、多相電流源のセンスアンプ回路およびアナログディジタル変換器により電流を測定する電流測定方法、ならびに、相応の電流測定装置に関する。制御信号のクロックパターンに応じて、相電流の測定のための測定窓を定め、さらに制御信号のクロックパターンを充分な時間的大きさの測定窓が得られるように時間的にシフトし、最小時間シフト量がスイッチング素子の最小無駄時間とセンスアンプ回路の最小過渡時間とアナログディジタル変換器の最小サンプリング時間との和から成るようにする。また、クロックパターンを相ベクトルの瞬時の回転角度位置に応じて選択することもできる。
【解決手段】制御ユニットにより、少なくとも1つの制御可能なスイッチング素子に作用する制御信号のクロックパターンを形成し、多相電流源のセンスアンプ回路およびアナログディジタル変換器により電流を測定する電流測定方法、ならびに、相応の電流測定装置に関する。制御信号のクロックパターンに応じて、相電流の測定のための測定窓を定め、さらに制御信号のクロックパターンを充分な時間的大きさの測定窓が得られるように時間的にシフトし、最小時間シフト量がスイッチング素子の最小無駄時間とセンスアンプ回路の最小過渡時間とアナログディジタル変換器の最小サンプリング時間との和から成るようにする。また、クロックパターンを相ベクトルの瞬時の回転角度位置に応じて選択することもできる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は多相電流源における電流測定方法に関する。
【背景技術】
【0002】
従来技術
多相制御の行われる電動機では、しばしば、相電流を検出することが要求される。電動機への電流供給は個々のブリッジ分岐に複数のスイッチング素子を配置した制御可能なブリッジ回路を介して行われ、当該の電動機に対して所望の給電が行われる。相電流を検出するために、それぞれの相線路に低オームのシャント抵抗が配置される。このため多相の電流測定装置には大きなコストがかかる。
【発明の概要】
【発明が解決しようとする課題】
【0003】
したがって、本発明の課題は簡単かつ低コストな電流測定手段を提供することである。特に測定の介入によっても雑音が全く生じないかまたはほとんど生じず、トルクリップルが小さくなるようにすることが望ましい。また、場合により設けられる中間回路コンデンサなどの付加的な素子に対する負担が低減されることも望まれる。
【課題を解決するための手段】
【0004】
本発明では、基本的には、唯一のシャント抵抗による電流測定が行われ、相電流が連続的に求められる。この場合、3相のうち第1,第2の2つの相のみを測定し、第3の相はキルヒホッフの法則にしたがって計算すればよい。制御可能なスイッチング素子および直流電流中間回路を備えたブリッジ回路、例えばB6ブリッジが用いられる。ここで、測定すべき相電流に相応する電流が中間回路への供給線および中間回路からの戻り線に共通のシャント抵抗を通って流れる。スイッチング素子の駆動制御は本発明にしたがって形成される制御信号のクロックパターンによって行われる。
【0005】
本発明は、電気負荷に対して所望の量だけ電流を供給するために、制御ユニットにより、少なくとも1つの制御可能なスイッチング素子に作用する制御信号のクロックパターンを形成し、電流源、特に多相電流源のセンスアンプ回路およびアナログディジタル変換器により電流を測定する、電流測定方法に関する。ここで、本発明によれば、制御信号のクロックパターンによって、電流、特に相電流の測定のための測定窓が定められ、さらに制御信号のクロックパターンが充分な時間的大きさの測定窓が得られるように時間的にシフトされ、最小時間シフト量が、スイッチング素子の最小無駄時間、特にブリッジ分岐の最小無駄時間と、センスアンプ回路の最小過渡時間と、アナログディジタル変換器の最小サンプリング時間との和から成る。
【0006】
これにより、使用されるハードウェアを考慮して、最小位相シフト量が求められる。位相シフト量が最小化されることにより、位相シフトによって生じて加熱をもたらす盲電流も同様に最小化される。このため、ブリッジ回路の加熱はほとんど生じない。スイッチング素子の無駄時間は確実なスイッチングを保証するのに必要な時間である。スイッチング素子が制御信号により導通され、続いて再び遮断された後に、確実な電流ゼロ交差を保証するための無駄時間が待機される。また、測定信号のエッジが急峻であるため、正確な電流測定を保証するには、センスアンプ回路の過渡時間をも待機しなければならない。さらに、アナログディジタル変換器のサンプリング時間も、エラーのない変換を達成するために待機されなければならない。有利には、サンプリング時間の終了時に電流測定が行われる。
【図面の簡単な説明】
【0007】
【図1】本発明の装置の回路図である。
【図2】本発明の方法を説明するためのチャートである。
【図3】本発明の方法を説明するためのチャートである。
【図4】本発明の方法を説明するためのチャートである。
【図5】本発明の方法を説明するためのチャートである。
【図6】本発明の方法を説明するためのチャートである。
【図7】本発明の方法を説明するためのチャートである。
【図8】本発明の方法を説明するためのチャートである。
【図9】本発明の方法を説明するためのチャートである。
【図10】本発明の方法を説明するためのチャートである。
【図11】本発明の方法を説明するためのチャートである。
【図12】本発明の方法を説明するためのチャートである。
【図13】本発明の方法を説明するためのチャートである。
【図14】本発明の方法を説明するためのチャートである。
【図15】本発明の方法を説明するためのチャートである。
【図16】本発明の方法を説明するためのチャートである。
【図17】本発明の方法を説明するためのチャートである。
【図18】本発明の方法を説明するためのチャートである。
【図19】本発明の方法を説明するためのチャートである。
【図20】本発明の方法を説明するためのチャートである。
【図21】本発明の方法を説明するためのチャートである。
【図22】本発明の方法を説明するためのチャートである。
【図23】本発明の方法を説明するためのチャートである。
【発明を実施するための形態】
【0008】
また、本発明は、電気負荷に対して所望の量だけ電流を供給するために、制御ユニットにより、制御可能なスイッチング素子に作用する制御信号のクロックパターンを形成する、多相電流源の電流測定方法に関する。ここで、本発明によれば、制御信号のクロックパターンに応じて相電流の測定のための測定窓が定められ、さらに、制御信号のクロックパターンが、充分な時間的大きさの測定窓が得られるように、かつ、電流測定に対して選択される相を考慮して、時間的にシフトして選択される。これにより、電流測定によって生じる電流測定ベクトルに対する位相が選択される。測定過程が介入することにより制御の1周期ごとにベクトル誤差が発生するが、位相を選択すれば当該のベクトル誤差が最小化され、ほぼゼロとなる。これにより雑音が低減され、トルクリップルがきわめて小さくなる。
【0009】
さらに、本発明は、電気負荷に対して所望の量だけ電流を供給するために、制御ユニットにより、制御可能なスイッチング素子に作用する制御信号のクロックパターンを形成する、相ベクトルを有する多相電流源の電流測定方法に関する。ここで、本発明によれば、制御信号のクロックパターンによって相電流の測定のための測定窓が定められ、さらに、制御信号のクロックパターンが、充分な時間的大きさの測定窓が得られるように、かつ、相ベクトルの瞬時の回転角度位置を考慮して、時間的にシフトして選択される。これにより、盲電流ひいてはトルクリップルが低減され、電流測定ベクトルの補償回数を低減することができる。
【0010】
非対称のパルス幅変調において前述した最小位相シフト量を計算する際に、相電流がその時点のPWM周期において1回しか測定されないケースが考慮される。その時点のPWM周期において2回〜n回の測定が行われるケースでは、最小位相シフト量は別の値を取る。後者のケースでは、
(n−1)×アナログディジタル変換器の最小変換時間W
が前述した和にさらに加算される。ここでnはPWM周期ごとの相電流の測定回数を表す。これによりアナログディジタル変換器の変換時間、すなわち、PWM周期ごとの測定回数に関連する時間が考慮される。
【0011】
本発明の実施形態によれば、制御信号としてパルス幅変調信号(PWM信号)が用いられる。制御可能なスイッチング素子は、有利には、対称のパルス幅変調信号ではなく非対称のパルス幅変調信号により制御される。
【0012】
有利には、電気負荷として非同期機または永久磁石同期機への給電、特に多相の非同期機または多相の永久磁石同期機への給電が行われる。これらの電気負荷すなわちモータは有利には星形に接続される。
【0013】
また有利には、測定窓ごとに電気負荷の1つの相電流の測定が行われる。つまり各相電流が時間的に順次に測定される。
【0014】
さらに有利には、スイッチング素子として電子モジュール、特に電界効果トランジスタFETおよび/またはサイリスタが用いられる。スイッチング素子は制御信号の印加される制御入力側を有し、これによりスイッチング素子の切り換え状態が変更される。
【0015】
本発明の有利な実施形態によれば、電気負荷への給電は制御可能なブリッジ回路、特にB6ブリッジにより行われる。当該のブリッジ回路の個々の分岐には複数のスイッチング素子が配置され、星形に接続された3相の非同期機または永久磁石同期機への給電が行われる。
【0016】
ブリッジ回路に対して、有利には、直流電流回路、特に直流電流中間回路を介して給電が行われる。
【0017】
電流測定は直流電流回路、特に直流電流中間回路に配置された唯一のシャント抵抗により行われる。それぞれの相電流を測定するために個々のスイッチング素子が選択されて駆動され、相応の測定窓においてシャント抵抗を通って流れる相電流が測定される。シャント抵抗における信号はセンスアンプ回路により増幅され、アナログディジタル変換器を介して変換され、種々の目的に用いられる。
【0018】
特に有利には、電流測定によって生じた目標ベクトルからの偏差がゼロとなるかまたはできるだけ小さく維持されるように相が選択される。これにより損失が最小化される。
【0019】
有利には、電流測定によって生じた電流測定ベクトルの位相が前述した偏差の最小化のために選択される。これには種々の手段が考えられるが、最も小さい損失を有する位相を選択するのが有利である。
【0020】
さらに有利には、電流測定によって生じた電流測定ベクトルが相ベクトルとともに回転される。相ベクトルだけでなく電流測定ベクトルも回転されることにより、相ベクトルの瞬時の回転角度位置に応じて、電流測定が行われる。
【0021】
相ベクトルは、有利には、トルク調整ベクトルと場形成ベクトルとを組み合わせたものである。
【0022】
本発明は特に自動車のパワーステアリングシステムに用いられる。したがって、本発明の電気負荷は有利にはステアリングを操作する電動機である。
【実施例】
【0023】
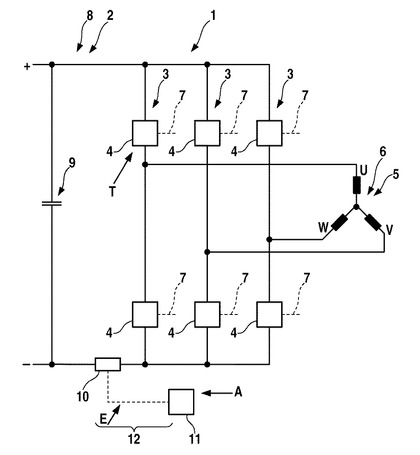
図1には直流電流回路2に接続されたブリッジ回路1が示されている。ブリッジ回路1は3つのブリッジ分岐3を備えたB6ブリッジとして構成されている。各ブリッジ分岐3は制御可能なスイッチング素子4を2つずつ有している。当該のブリッジ回路1により、3相の非同期機6として構成された電気負荷5が制御される。図示されていない制御ユニットにより、所定のクロックパターンにしたがって制御信号が形成される。ここで、制御信号は各スイッチング素子4の制御入力側7へ供給され、これにより各スイッチング素子4が導通状態または阻止状態へ切り換えられる。直流電流回路2は中間回路コンデンサ9を有する直流電流中間回路8として構成されている。直流電流回路2はシャント抵抗10を介してブリッジ回路1に接続されている。
【0024】
本発明の手段では、唯一のシャント抵抗10が設けられており、これにより非同期機6の相電流が順次に求められる。有利には、全部で3つの相電流のうち2つの相電流が測定され、第3の相電流はキルヒホッフの法則にしたがって計算される。直流電流中間回路8への供給線および直流電流中間回路8からの戻り線に共通に配置されたシャント抵抗10を通る電流を測定すべき相電流に相応させるには、制御可能なスイッチング素子4に対する所定のスイッチングパターンすなわち所定の駆動パターンが要求される。シャント抵抗10にはシャント抵抗10のアナログ信号をディジタル信号へ変換するアナログディジタル変換器11とその信号を増幅するセンスアンプ回路12とが接続されている。センスアンプ回路12は駆動時に過渡時間Eを有する。アナログディジタル変換器11はサンプリング時間Aを有し、電界効果トランジスタFETとして構成されたスイッチング素子4は無駄時間Tを有する。
【0025】
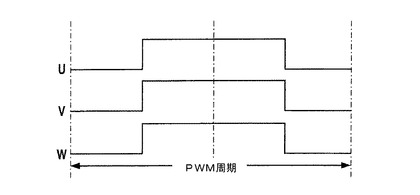
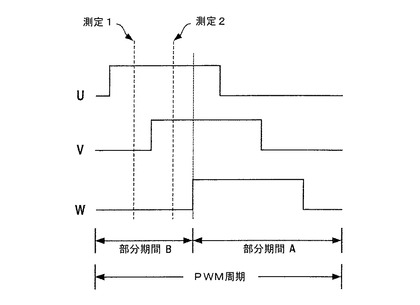
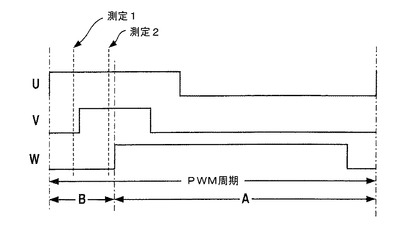
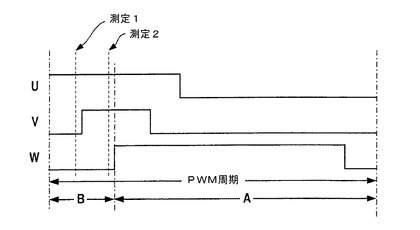
図示されていない制御ユニットによって行われるスイッチング素子4の制御は、図2に示されている公知のセンタリング方式のパルス幅変調制御、すなわち、個々の相U,V,Wが図2のパルス幅変調周期(PWM周期)内で中央にセンタリングされるクロックパターンにしたがった制御によっては行われない。図2の方式で制御を行うと、電気負荷5の相電流が重なってしまい、唯一のシャント抵抗10によって測定することができなくなるからである。したがって、図3に示されている別のクロックパターンが採用される。つまりスイッチング素子4のスイッチング時点が時間的にずらされ、PWM周期内で少なくとも2つの相電流の測定が可能となるように制御される。図3には第1の測定および第2の測定の2回の測定が示されている。第1の測定の時点ではシャント抵抗10を通る電流は相電流Uに対応し、第2の測定の時点ではシャント抵抗10を通る電流は相Wの逆電流(相電流U,Vの和)に対応している。1つのPWM周期は部分期間A(半周期A)およびこれに続く部分期間B(半周期B)から成るが、測定はPWM周期の部分期間Bにおいて行われる。図2の制御と図3の制御とを比較することにより、スイッチング素子のスイッチング時点がずらされる(シフトされる)ことが明らかである。
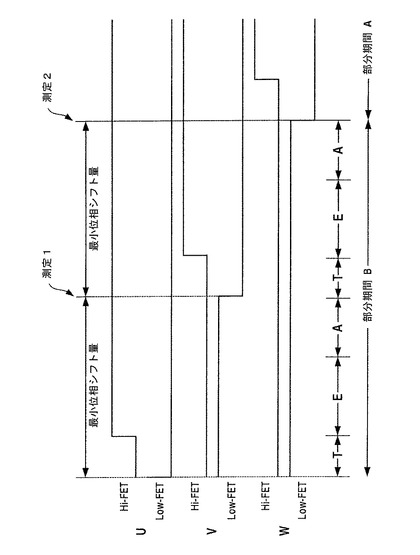
【0026】
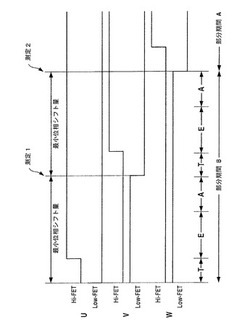
図4には部分期間Bの詳細が示されている。電界効果トランジスタとして構成されたスイッチング素子4のステータスが個々の相U,V,Wに対して"Hi−FET""Low−FET"の記号で示されている。第1の測定を行うためにハードウェアの関与が考慮される。ここでは、スイッチング素子4の無駄時間T、センスアンプ回路12の過渡時間E、ならびに、アナログディジタル変換器11のサンプリング時間Aが考慮される。これら3つの機能部の機能が保証され、しかもこれらの不要な時間が最小化されると、図4に示されているように、3つの時間の和として、第1の測定に対する最小位相シフト量が得られる。サンプリング時間Aの終了時に第1の測定が行われる。第2の測定についても同様であり、最小無駄時間、最小過渡時間および最小サンプリング時間を待機しなければならないので、これら3つの時間の和から第2の測定に対する最小位相シフト量が得られる。
【0027】
したがって、電流測定に必要なシフト量は
シフト量=ブリッジ分岐の無駄時間+センスアンプ回路の過渡時間+アナログディジタル変換器のサンプリング時間
として得られる。部分期間Bは2回の測定にわたっているから
部分期間B=2×シフト量
として得られ、部分期間Aは
部分期間A=PWM周期−部分期間B
として得られる。
【0028】
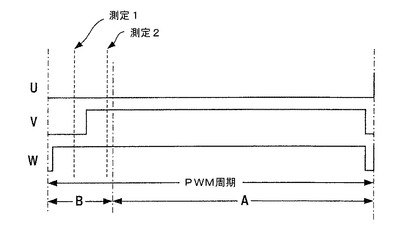
図5には、電流測定のたびに、例えばアース線路に配置された共通のシャント抵抗10を通る電流を測定すべき相電流に相応させるために、非同期機6の少なくとも2つの相においてスイッチング素子4を制御するためのクロックパターンが必要となることが示されている。これは、前述したように、非対称のパルス幅変調における位相シフトによって達成される。
【0029】
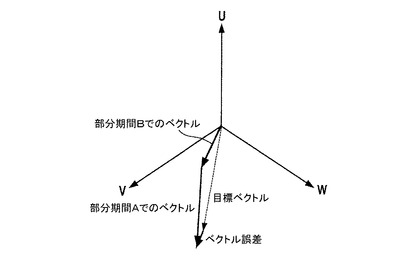
図6には、制御信号のクロックパターンが部分期間Bにおいて2つの相電流を測定するために破壊され、オンオフ比の上方限界値および下方限界値が超過されないことが示されている。図5の実施例では位相シフトをともなう非対称のパルス幅変調が行われ、電流測定が可能であったのとは異なり、図6の実施例では電流測定は不可能である。図6のクロックパターンが発生する場合、図5の実施例の知識が用いられ、図示のPWM周期に対して、図7のクロックパターンが得られる。意図的な介入の効果をわかりやすくするために、介入を行った場合と行わなかった場合の測定ベクトル、目標ベクトルおよびベクトル誤差を図8〜図11のベクトル図に示した。
【0030】
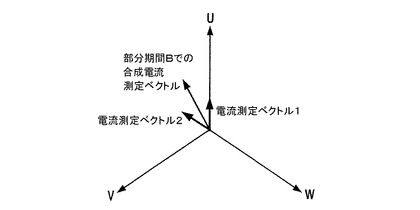
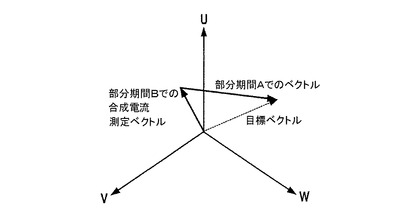
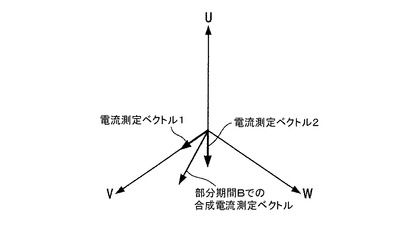
図8によれば、図7の第1の測定から、位相Uを有する第1の電流測定ベクトルが得られる。位相V,Wを有する第2の電流測定ベクトルは、第2の測定から得られる。2つの電流測定ベクトルはベクトル加算され、これにより部分期間Bでの合成電流測定ベクトルが得られる。図9のベクトル図には、当該の合成電流測定ベクトルに基づいて、制御ユニットによって相ベクトルとして設定される目標ベクトルが示されている。この相ベクトルはトルク調整ベクトルおよび場形成ベクトルと見なすことができる。図9において"部分期間Aのベクトル"が形成される場合、部分期間Bの合成電流測定ベクトルと部分期間Aのベクトルとのベクトル加算が行われ、目標ベクトルが得られる。こうして目標ベクトルの形成が可能となり、電流測定も実行可能である。
【0031】
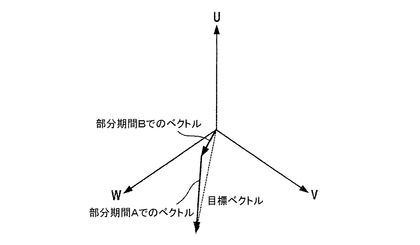
図10には図6のチャートに相応するベクトル図が示されている。ここでは相Uに関する情報が存在しないので、電流測定が不可能となっている。
【0032】
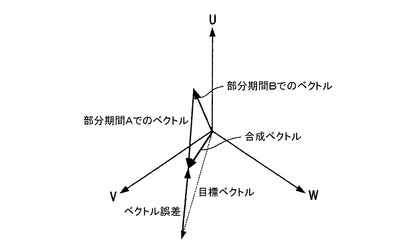
図11には、図7のチャートに相応するベクトル図が示されている。ここでは非対称のパルス幅変調が行われ、電流測定の介入が行われている。図11から、測定の介入によって生じた部分期間Bのベクトルが見て取れる。また、部分期間Aのベクトルが示されており、ここから合成ベクトルが得られるが、これは目標ベクトルには相応していない。図11においては合成ベクトルと目標ベクトルとのあいだにベクトル誤差が生じることが示されている。測定の介入によって、測定周波数を有する可聴の雑音が形成される。さらに、測定の介入は直流電流中間回路8すなわちコンデンサ9内部に高い盲電流成分を発生させる。こうして、測定介入が行われると、特に直流電流中間回路での電流の増大が起こり、コンデンサ9および出力段の負荷が増大する。さらに、場合によっては、発生したベクトル誤差によりトルクリップルも増大してしまう。これらの効果は測定介入ベクトルの振幅に応じて変化する。
【0033】
図13に示されているように、2つの電流測定ベクトルに対する位相が本発明によって選択される場合、測定介入の回数が低減され、雑音の発生が無視できる程度となり、唯一のシャント抵抗10による電流測定の際のコンデンサ電流およびトルクリップルが低減される。図12には、第1の電流測定ベクトルが位相Vを有し、第2の電流測定ベクトルが位相V,Wから成ることが示されている。ここで、図12の部分期間Bの合成電流測定ベクトルは、図11の合成電流測定ベクトルの位置とは異なる位置を取る。図13から、図12に相応するベクトル図に目標ベクトルおよび部分期間Aのベクトルを入力すると、ベクトル誤差がきわめて小さくなることがわかる。このことは図13と図11とを比較してみるとよくわかる。
【0034】
図12,図13に相応するクロックパターンが図14から得られる。ここからは、測定介入の際に適切な相選択を行うとベクトル誤差が格段に小さくなることがわかる。図示されている目標ベクトルでは、付加的に部分期間Aでの測定介入の補償が行われると、ベクトル誤差は完全にゼロとなる。
【0035】
本発明の方法に基づいて、位相シフト8μs、PWM周波数16kHzおよび8kHzでの界磁方向制御により、中間回路の電流が低減される。コンデンサ電流は負荷の異なる複数のケースにわたって平均される。基本的な0%のケースとして純粋なセンタリング方式の制御がシミュレートされる。後続の値は唯一の相対係数によって得られる。測定介入が固定である場合、コンデンサ電流の限界値は26.97%高まる。相選択をともなう測定介入が行われると、コンデンサ電流の増大は20.8%まで抑えられる。同様の低減が和電流に対しても得られる。当該の和電流がシャント抵抗10での有効電流となる。
【0036】
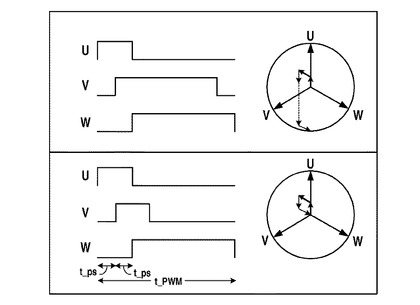
続いて、図15〜図22に示されている実施例を詳細に説明する。図1の回路により電流測定が行われる際に、相応のクロックパターンが用いられる。当該のクロックパターンは、雑音を考慮して、1kHzの測定介入のたびに設定されるのではなく、16kHzのPWM周期ごとに設定される。クロックパターンは図15に示されているような個々の相V,Wへの位相シフトによって形成される。このとき、前述した実施例と同様に、PWM周期は部分期間Aおよび部分期間Bへ分割され、電流測定に用いられるのは部分期間Bである。この場合にも2回の測定が行われるが、測定介入を補償するためにきわめて大きなベクトルが必要となる場合、電流測定の際のクロックパターンは破壊される。これはPWM周期内のベクトルを形成するための時間が足りなくなってしまうからである。この例が図16に示されている。
【0037】
トルク調整ベクトルが電流測定ベクトルの反対側に位置する場合、つまり、盲電流が発生する場合には、個々のスイッチング状態の発生に際して格段に大きな勾配が形成される。これは、部分期間Bでのトルク調整ベクトルと電流測定ベクトルとのあいだの差がきわめて大きいためである。
【0038】
このため、本発明によれば、調整すべきクロックパターンすなわち形成すべき電流測定パターンに対するトルク調整ベクトルの角度位置が考慮される。この場合、角度位置に応じて6つの異なる電流測定パターンが設定される。有利には、コンデンサ9および直流電流中間回路8の盲電流成分が低減される。また、電圧領域が良好に利用されるので、効率も増大する。さらに、相電流の勾配ひいてはいわゆるトルクリップルが低減される。
【0039】
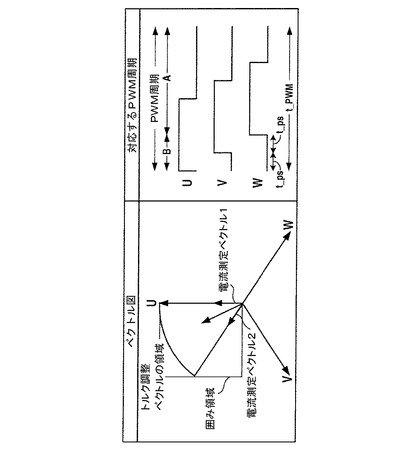
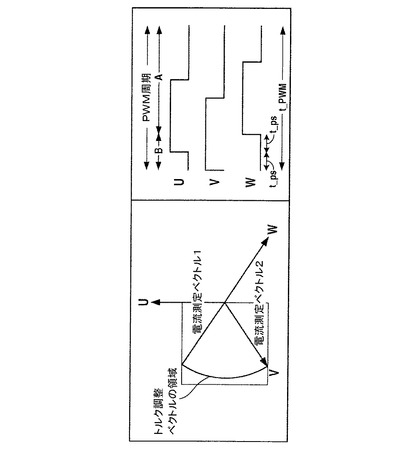
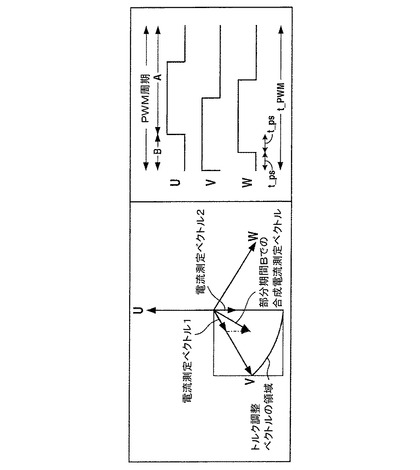
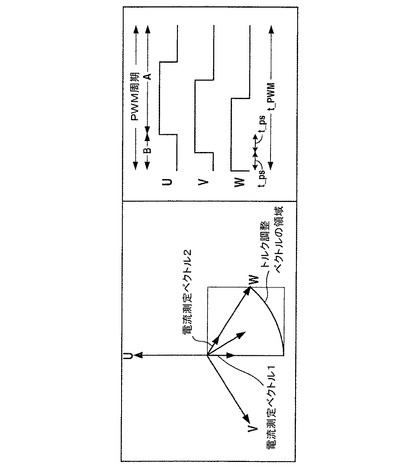
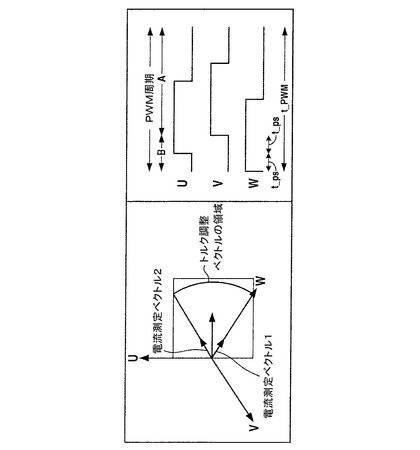
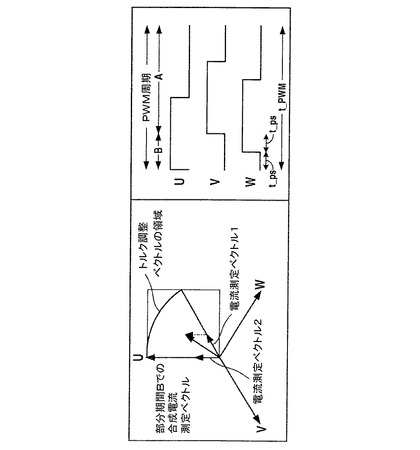
図17〜図22を比べてみると、電流測定ベクトルはトルク調整ベクトルおよび場形成ベクトル(以下では相ベクトルと称する)の組み合わせの位置に応じて選択されることがわかる。有利には、電流測定パターンは雑音の発生を考慮してPWM周期ごとに設定され、相ベクトルは囲み領域内に位置することになる。図18〜図22ではそれぞれ左方にベクトル図、右方に対応するPWM周期が示されており、ベクトル図内の囲み領域はトルク調整ベクトルの領域を表している。図17〜図22ではベクトル図に対応する電流測定パターンが部分期間Bのみに関連して示されている。部分期間Aは囲み領域内の位置に応じて変化している。
【0040】
図17〜図22によれば、クロックパターンは瞬時の回転角度位置を考慮して選択される。特に電流測定によって生じる電流測定ベクトルは相ベクトルとともに回転する。これにより中間回路における電流の低減が達成される。介入が完全に回転磁界の角度に応じて行われる場合、盲電流はほぼ完全に低減される。この低減はさらに、シャント抵抗10での有効電流を表す和電流に対しても得られる。
【0041】
図4の実施例では2つの相の部分期間Bにおいてシャント抵抗10を流れる電流の測定が行われるのに対して、図23によれば2つの相電流が複数回、例えばn回サンプリングされる。図23にはPWM周期ごとに2つの相電流を2回測定することが示されている。その場合、最小位相シフト量は、式
最小位相シフト量=スイッチング素子の最小無駄時間T(特にブリッジ分岐の最小無駄時間T)+センスアンプ回路の最小過渡時間E+アナログディジタル変換器の最小変換時間W・(n−1)+アナログディジタル変換器の最小サンプリング時間A
ここで、nはPWM周期ごとの相電流の測定回数
によって得られる。アナログディジタル変換器の変換時間Wは、サンプルアンドホールド回路のサンプリング時間とアナログディジタル変換器の変換時間とから成る完全な変換時間であると理解されたい。図23によれば、部分期間Bにおいて、まず第1の相の2回の電流測定、すなわち測定1.1および測定1.2が行われている。1つの相につき2回の測定が行われるのである。部分期間B内の続く時間範囲では、他の相の2回の電流測定、すなわち測定2.1.測定2.2が行われる。第3の相の電流はキルヒホッフの法則にしたがって求められる。
【技術分野】
【0001】
本発明は多相電流源における電流測定方法に関する。
【背景技術】
【0002】
従来技術
多相制御の行われる電動機では、しばしば、相電流を検出することが要求される。電動機への電流供給は個々のブリッジ分岐に複数のスイッチング素子を配置した制御可能なブリッジ回路を介して行われ、当該の電動機に対して所望の給電が行われる。相電流を検出するために、それぞれの相線路に低オームのシャント抵抗が配置される。このため多相の電流測定装置には大きなコストがかかる。
【発明の概要】
【発明が解決しようとする課題】
【0003】
したがって、本発明の課題は簡単かつ低コストな電流測定手段を提供することである。特に測定の介入によっても雑音が全く生じないかまたはほとんど生じず、トルクリップルが小さくなるようにすることが望ましい。また、場合により設けられる中間回路コンデンサなどの付加的な素子に対する負担が低減されることも望まれる。
【課題を解決するための手段】
【0004】
本発明では、基本的には、唯一のシャント抵抗による電流測定が行われ、相電流が連続的に求められる。この場合、3相のうち第1,第2の2つの相のみを測定し、第3の相はキルヒホッフの法則にしたがって計算すればよい。制御可能なスイッチング素子および直流電流中間回路を備えたブリッジ回路、例えばB6ブリッジが用いられる。ここで、測定すべき相電流に相応する電流が中間回路への供給線および中間回路からの戻り線に共通のシャント抵抗を通って流れる。スイッチング素子の駆動制御は本発明にしたがって形成される制御信号のクロックパターンによって行われる。
【0005】
本発明は、電気負荷に対して所望の量だけ電流を供給するために、制御ユニットにより、少なくとも1つの制御可能なスイッチング素子に作用する制御信号のクロックパターンを形成し、電流源、特に多相電流源のセンスアンプ回路およびアナログディジタル変換器により電流を測定する、電流測定方法に関する。ここで、本発明によれば、制御信号のクロックパターンによって、電流、特に相電流の測定のための測定窓が定められ、さらに制御信号のクロックパターンが充分な時間的大きさの測定窓が得られるように時間的にシフトされ、最小時間シフト量が、スイッチング素子の最小無駄時間、特にブリッジ分岐の最小無駄時間と、センスアンプ回路の最小過渡時間と、アナログディジタル変換器の最小サンプリング時間との和から成る。
【0006】
これにより、使用されるハードウェアを考慮して、最小位相シフト量が求められる。位相シフト量が最小化されることにより、位相シフトによって生じて加熱をもたらす盲電流も同様に最小化される。このため、ブリッジ回路の加熱はほとんど生じない。スイッチング素子の無駄時間は確実なスイッチングを保証するのに必要な時間である。スイッチング素子が制御信号により導通され、続いて再び遮断された後に、確実な電流ゼロ交差を保証するための無駄時間が待機される。また、測定信号のエッジが急峻であるため、正確な電流測定を保証するには、センスアンプ回路の過渡時間をも待機しなければならない。さらに、アナログディジタル変換器のサンプリング時間も、エラーのない変換を達成するために待機されなければならない。有利には、サンプリング時間の終了時に電流測定が行われる。
【図面の簡単な説明】
【0007】
【図1】本発明の装置の回路図である。
【図2】本発明の方法を説明するためのチャートである。
【図3】本発明の方法を説明するためのチャートである。
【図4】本発明の方法を説明するためのチャートである。
【図5】本発明の方法を説明するためのチャートである。
【図6】本発明の方法を説明するためのチャートである。
【図7】本発明の方法を説明するためのチャートである。
【図8】本発明の方法を説明するためのチャートである。
【図9】本発明の方法を説明するためのチャートである。
【図10】本発明の方法を説明するためのチャートである。
【図11】本発明の方法を説明するためのチャートである。
【図12】本発明の方法を説明するためのチャートである。
【図13】本発明の方法を説明するためのチャートである。
【図14】本発明の方法を説明するためのチャートである。
【図15】本発明の方法を説明するためのチャートである。
【図16】本発明の方法を説明するためのチャートである。
【図17】本発明の方法を説明するためのチャートである。
【図18】本発明の方法を説明するためのチャートである。
【図19】本発明の方法を説明するためのチャートである。
【図20】本発明の方法を説明するためのチャートである。
【図21】本発明の方法を説明するためのチャートである。
【図22】本発明の方法を説明するためのチャートである。
【図23】本発明の方法を説明するためのチャートである。
【発明を実施するための形態】
【0008】
また、本発明は、電気負荷に対して所望の量だけ電流を供給するために、制御ユニットにより、制御可能なスイッチング素子に作用する制御信号のクロックパターンを形成する、多相電流源の電流測定方法に関する。ここで、本発明によれば、制御信号のクロックパターンに応じて相電流の測定のための測定窓が定められ、さらに、制御信号のクロックパターンが、充分な時間的大きさの測定窓が得られるように、かつ、電流測定に対して選択される相を考慮して、時間的にシフトして選択される。これにより、電流測定によって生じる電流測定ベクトルに対する位相が選択される。測定過程が介入することにより制御の1周期ごとにベクトル誤差が発生するが、位相を選択すれば当該のベクトル誤差が最小化され、ほぼゼロとなる。これにより雑音が低減され、トルクリップルがきわめて小さくなる。
【0009】
さらに、本発明は、電気負荷に対して所望の量だけ電流を供給するために、制御ユニットにより、制御可能なスイッチング素子に作用する制御信号のクロックパターンを形成する、相ベクトルを有する多相電流源の電流測定方法に関する。ここで、本発明によれば、制御信号のクロックパターンによって相電流の測定のための測定窓が定められ、さらに、制御信号のクロックパターンが、充分な時間的大きさの測定窓が得られるように、かつ、相ベクトルの瞬時の回転角度位置を考慮して、時間的にシフトして選択される。これにより、盲電流ひいてはトルクリップルが低減され、電流測定ベクトルの補償回数を低減することができる。
【0010】
非対称のパルス幅変調において前述した最小位相シフト量を計算する際に、相電流がその時点のPWM周期において1回しか測定されないケースが考慮される。その時点のPWM周期において2回〜n回の測定が行われるケースでは、最小位相シフト量は別の値を取る。後者のケースでは、
(n−1)×アナログディジタル変換器の最小変換時間W
が前述した和にさらに加算される。ここでnはPWM周期ごとの相電流の測定回数を表す。これによりアナログディジタル変換器の変換時間、すなわち、PWM周期ごとの測定回数に関連する時間が考慮される。
【0011】
本発明の実施形態によれば、制御信号としてパルス幅変調信号(PWM信号)が用いられる。制御可能なスイッチング素子は、有利には、対称のパルス幅変調信号ではなく非対称のパルス幅変調信号により制御される。
【0012】
有利には、電気負荷として非同期機または永久磁石同期機への給電、特に多相の非同期機または多相の永久磁石同期機への給電が行われる。これらの電気負荷すなわちモータは有利には星形に接続される。
【0013】
また有利には、測定窓ごとに電気負荷の1つの相電流の測定が行われる。つまり各相電流が時間的に順次に測定される。
【0014】
さらに有利には、スイッチング素子として電子モジュール、特に電界効果トランジスタFETおよび/またはサイリスタが用いられる。スイッチング素子は制御信号の印加される制御入力側を有し、これによりスイッチング素子の切り換え状態が変更される。
【0015】
本発明の有利な実施形態によれば、電気負荷への給電は制御可能なブリッジ回路、特にB6ブリッジにより行われる。当該のブリッジ回路の個々の分岐には複数のスイッチング素子が配置され、星形に接続された3相の非同期機または永久磁石同期機への給電が行われる。
【0016】
ブリッジ回路に対して、有利には、直流電流回路、特に直流電流中間回路を介して給電が行われる。
【0017】
電流測定は直流電流回路、特に直流電流中間回路に配置された唯一のシャント抵抗により行われる。それぞれの相電流を測定するために個々のスイッチング素子が選択されて駆動され、相応の測定窓においてシャント抵抗を通って流れる相電流が測定される。シャント抵抗における信号はセンスアンプ回路により増幅され、アナログディジタル変換器を介して変換され、種々の目的に用いられる。
【0018】
特に有利には、電流測定によって生じた目標ベクトルからの偏差がゼロとなるかまたはできるだけ小さく維持されるように相が選択される。これにより損失が最小化される。
【0019】
有利には、電流測定によって生じた電流測定ベクトルの位相が前述した偏差の最小化のために選択される。これには種々の手段が考えられるが、最も小さい損失を有する位相を選択するのが有利である。
【0020】
さらに有利には、電流測定によって生じた電流測定ベクトルが相ベクトルとともに回転される。相ベクトルだけでなく電流測定ベクトルも回転されることにより、相ベクトルの瞬時の回転角度位置に応じて、電流測定が行われる。
【0021】
相ベクトルは、有利には、トルク調整ベクトルと場形成ベクトルとを組み合わせたものである。
【0022】
本発明は特に自動車のパワーステアリングシステムに用いられる。したがって、本発明の電気負荷は有利にはステアリングを操作する電動機である。
【実施例】
【0023】
図1には直流電流回路2に接続されたブリッジ回路1が示されている。ブリッジ回路1は3つのブリッジ分岐3を備えたB6ブリッジとして構成されている。各ブリッジ分岐3は制御可能なスイッチング素子4を2つずつ有している。当該のブリッジ回路1により、3相の非同期機6として構成された電気負荷5が制御される。図示されていない制御ユニットにより、所定のクロックパターンにしたがって制御信号が形成される。ここで、制御信号は各スイッチング素子4の制御入力側7へ供給され、これにより各スイッチング素子4が導通状態または阻止状態へ切り換えられる。直流電流回路2は中間回路コンデンサ9を有する直流電流中間回路8として構成されている。直流電流回路2はシャント抵抗10を介してブリッジ回路1に接続されている。
【0024】
本発明の手段では、唯一のシャント抵抗10が設けられており、これにより非同期機6の相電流が順次に求められる。有利には、全部で3つの相電流のうち2つの相電流が測定され、第3の相電流はキルヒホッフの法則にしたがって計算される。直流電流中間回路8への供給線および直流電流中間回路8からの戻り線に共通に配置されたシャント抵抗10を通る電流を測定すべき相電流に相応させるには、制御可能なスイッチング素子4に対する所定のスイッチングパターンすなわち所定の駆動パターンが要求される。シャント抵抗10にはシャント抵抗10のアナログ信号をディジタル信号へ変換するアナログディジタル変換器11とその信号を増幅するセンスアンプ回路12とが接続されている。センスアンプ回路12は駆動時に過渡時間Eを有する。アナログディジタル変換器11はサンプリング時間Aを有し、電界効果トランジスタFETとして構成されたスイッチング素子4は無駄時間Tを有する。
【0025】
図示されていない制御ユニットによって行われるスイッチング素子4の制御は、図2に示されている公知のセンタリング方式のパルス幅変調制御、すなわち、個々の相U,V,Wが図2のパルス幅変調周期(PWM周期)内で中央にセンタリングされるクロックパターンにしたがった制御によっては行われない。図2の方式で制御を行うと、電気負荷5の相電流が重なってしまい、唯一のシャント抵抗10によって測定することができなくなるからである。したがって、図3に示されている別のクロックパターンが採用される。つまりスイッチング素子4のスイッチング時点が時間的にずらされ、PWM周期内で少なくとも2つの相電流の測定が可能となるように制御される。図3には第1の測定および第2の測定の2回の測定が示されている。第1の測定の時点ではシャント抵抗10を通る電流は相電流Uに対応し、第2の測定の時点ではシャント抵抗10を通る電流は相Wの逆電流(相電流U,Vの和)に対応している。1つのPWM周期は部分期間A(半周期A)およびこれに続く部分期間B(半周期B)から成るが、測定はPWM周期の部分期間Bにおいて行われる。図2の制御と図3の制御とを比較することにより、スイッチング素子のスイッチング時点がずらされる(シフトされる)ことが明らかである。
【0026】
図4には部分期間Bの詳細が示されている。電界効果トランジスタとして構成されたスイッチング素子4のステータスが個々の相U,V,Wに対して"Hi−FET""Low−FET"の記号で示されている。第1の測定を行うためにハードウェアの関与が考慮される。ここでは、スイッチング素子4の無駄時間T、センスアンプ回路12の過渡時間E、ならびに、アナログディジタル変換器11のサンプリング時間Aが考慮される。これら3つの機能部の機能が保証され、しかもこれらの不要な時間が最小化されると、図4に示されているように、3つの時間の和として、第1の測定に対する最小位相シフト量が得られる。サンプリング時間Aの終了時に第1の測定が行われる。第2の測定についても同様であり、最小無駄時間、最小過渡時間および最小サンプリング時間を待機しなければならないので、これら3つの時間の和から第2の測定に対する最小位相シフト量が得られる。
【0027】
したがって、電流測定に必要なシフト量は
シフト量=ブリッジ分岐の無駄時間+センスアンプ回路の過渡時間+アナログディジタル変換器のサンプリング時間
として得られる。部分期間Bは2回の測定にわたっているから
部分期間B=2×シフト量
として得られ、部分期間Aは
部分期間A=PWM周期−部分期間B
として得られる。
【0028】
図5には、電流測定のたびに、例えばアース線路に配置された共通のシャント抵抗10を通る電流を測定すべき相電流に相応させるために、非同期機6の少なくとも2つの相においてスイッチング素子4を制御するためのクロックパターンが必要となることが示されている。これは、前述したように、非対称のパルス幅変調における位相シフトによって達成される。
【0029】
図6には、制御信号のクロックパターンが部分期間Bにおいて2つの相電流を測定するために破壊され、オンオフ比の上方限界値および下方限界値が超過されないことが示されている。図5の実施例では位相シフトをともなう非対称のパルス幅変調が行われ、電流測定が可能であったのとは異なり、図6の実施例では電流測定は不可能である。図6のクロックパターンが発生する場合、図5の実施例の知識が用いられ、図示のPWM周期に対して、図7のクロックパターンが得られる。意図的な介入の効果をわかりやすくするために、介入を行った場合と行わなかった場合の測定ベクトル、目標ベクトルおよびベクトル誤差を図8〜図11のベクトル図に示した。
【0030】
図8によれば、図7の第1の測定から、位相Uを有する第1の電流測定ベクトルが得られる。位相V,Wを有する第2の電流測定ベクトルは、第2の測定から得られる。2つの電流測定ベクトルはベクトル加算され、これにより部分期間Bでの合成電流測定ベクトルが得られる。図9のベクトル図には、当該の合成電流測定ベクトルに基づいて、制御ユニットによって相ベクトルとして設定される目標ベクトルが示されている。この相ベクトルはトルク調整ベクトルおよび場形成ベクトルと見なすことができる。図9において"部分期間Aのベクトル"が形成される場合、部分期間Bの合成電流測定ベクトルと部分期間Aのベクトルとのベクトル加算が行われ、目標ベクトルが得られる。こうして目標ベクトルの形成が可能となり、電流測定も実行可能である。
【0031】
図10には図6のチャートに相応するベクトル図が示されている。ここでは相Uに関する情報が存在しないので、電流測定が不可能となっている。
【0032】
図11には、図7のチャートに相応するベクトル図が示されている。ここでは非対称のパルス幅変調が行われ、電流測定の介入が行われている。図11から、測定の介入によって生じた部分期間Bのベクトルが見て取れる。また、部分期間Aのベクトルが示されており、ここから合成ベクトルが得られるが、これは目標ベクトルには相応していない。図11においては合成ベクトルと目標ベクトルとのあいだにベクトル誤差が生じることが示されている。測定の介入によって、測定周波数を有する可聴の雑音が形成される。さらに、測定の介入は直流電流中間回路8すなわちコンデンサ9内部に高い盲電流成分を発生させる。こうして、測定介入が行われると、特に直流電流中間回路での電流の増大が起こり、コンデンサ9および出力段の負荷が増大する。さらに、場合によっては、発生したベクトル誤差によりトルクリップルも増大してしまう。これらの効果は測定介入ベクトルの振幅に応じて変化する。
【0033】
図13に示されているように、2つの電流測定ベクトルに対する位相が本発明によって選択される場合、測定介入の回数が低減され、雑音の発生が無視できる程度となり、唯一のシャント抵抗10による電流測定の際のコンデンサ電流およびトルクリップルが低減される。図12には、第1の電流測定ベクトルが位相Vを有し、第2の電流測定ベクトルが位相V,Wから成ることが示されている。ここで、図12の部分期間Bの合成電流測定ベクトルは、図11の合成電流測定ベクトルの位置とは異なる位置を取る。図13から、図12に相応するベクトル図に目標ベクトルおよび部分期間Aのベクトルを入力すると、ベクトル誤差がきわめて小さくなることがわかる。このことは図13と図11とを比較してみるとよくわかる。
【0034】
図12,図13に相応するクロックパターンが図14から得られる。ここからは、測定介入の際に適切な相選択を行うとベクトル誤差が格段に小さくなることがわかる。図示されている目標ベクトルでは、付加的に部分期間Aでの測定介入の補償が行われると、ベクトル誤差は完全にゼロとなる。
【0035】
本発明の方法に基づいて、位相シフト8μs、PWM周波数16kHzおよび8kHzでの界磁方向制御により、中間回路の電流が低減される。コンデンサ電流は負荷の異なる複数のケースにわたって平均される。基本的な0%のケースとして純粋なセンタリング方式の制御がシミュレートされる。後続の値は唯一の相対係数によって得られる。測定介入が固定である場合、コンデンサ電流の限界値は26.97%高まる。相選択をともなう測定介入が行われると、コンデンサ電流の増大は20.8%まで抑えられる。同様の低減が和電流に対しても得られる。当該の和電流がシャント抵抗10での有効電流となる。
【0036】
続いて、図15〜図22に示されている実施例を詳細に説明する。図1の回路により電流測定が行われる際に、相応のクロックパターンが用いられる。当該のクロックパターンは、雑音を考慮して、1kHzの測定介入のたびに設定されるのではなく、16kHzのPWM周期ごとに設定される。クロックパターンは図15に示されているような個々の相V,Wへの位相シフトによって形成される。このとき、前述した実施例と同様に、PWM周期は部分期間Aおよび部分期間Bへ分割され、電流測定に用いられるのは部分期間Bである。この場合にも2回の測定が行われるが、測定介入を補償するためにきわめて大きなベクトルが必要となる場合、電流測定の際のクロックパターンは破壊される。これはPWM周期内のベクトルを形成するための時間が足りなくなってしまうからである。この例が図16に示されている。
【0037】
トルク調整ベクトルが電流測定ベクトルの反対側に位置する場合、つまり、盲電流が発生する場合には、個々のスイッチング状態の発生に際して格段に大きな勾配が形成される。これは、部分期間Bでのトルク調整ベクトルと電流測定ベクトルとのあいだの差がきわめて大きいためである。
【0038】
このため、本発明によれば、調整すべきクロックパターンすなわち形成すべき電流測定パターンに対するトルク調整ベクトルの角度位置が考慮される。この場合、角度位置に応じて6つの異なる電流測定パターンが設定される。有利には、コンデンサ9および直流電流中間回路8の盲電流成分が低減される。また、電圧領域が良好に利用されるので、効率も増大する。さらに、相電流の勾配ひいてはいわゆるトルクリップルが低減される。
【0039】
図17〜図22を比べてみると、電流測定ベクトルはトルク調整ベクトルおよび場形成ベクトル(以下では相ベクトルと称する)の組み合わせの位置に応じて選択されることがわかる。有利には、電流測定パターンは雑音の発生を考慮してPWM周期ごとに設定され、相ベクトルは囲み領域内に位置することになる。図18〜図22ではそれぞれ左方にベクトル図、右方に対応するPWM周期が示されており、ベクトル図内の囲み領域はトルク調整ベクトルの領域を表している。図17〜図22ではベクトル図に対応する電流測定パターンが部分期間Bのみに関連して示されている。部分期間Aは囲み領域内の位置に応じて変化している。
【0040】
図17〜図22によれば、クロックパターンは瞬時の回転角度位置を考慮して選択される。特に電流測定によって生じる電流測定ベクトルは相ベクトルとともに回転する。これにより中間回路における電流の低減が達成される。介入が完全に回転磁界の角度に応じて行われる場合、盲電流はほぼ完全に低減される。この低減はさらに、シャント抵抗10での有効電流を表す和電流に対しても得られる。
【0041】
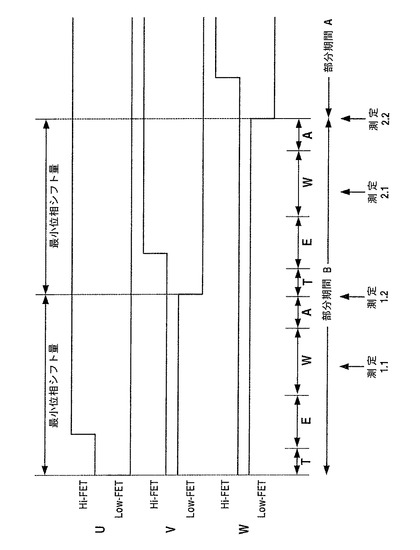
図4の実施例では2つの相の部分期間Bにおいてシャント抵抗10を流れる電流の測定が行われるのに対して、図23によれば2つの相電流が複数回、例えばn回サンプリングされる。図23にはPWM周期ごとに2つの相電流を2回測定することが示されている。その場合、最小位相シフト量は、式
最小位相シフト量=スイッチング素子の最小無駄時間T(特にブリッジ分岐の最小無駄時間T)+センスアンプ回路の最小過渡時間E+アナログディジタル変換器の最小変換時間W・(n−1)+アナログディジタル変換器の最小サンプリング時間A
ここで、nはPWM周期ごとの相電流の測定回数
によって得られる。アナログディジタル変換器の変換時間Wは、サンプルアンドホールド回路のサンプリング時間とアナログディジタル変換器の変換時間とから成る完全な変換時間であると理解されたい。図23によれば、部分期間Bにおいて、まず第1の相の2回の電流測定、すなわち測定1.1および測定1.2が行われている。1つの相につき2回の測定が行われるのである。部分期間B内の続く時間範囲では、他の相の2回の電流測定、すなわち測定2.1.測定2.2が行われる。第3の相の電流はキルヒホッフの法則にしたがって求められる。
【特許請求の範囲】
【請求項1】
制御可能な複数のスイッチング素子(4)により電気負荷(5)に対して所望の量だけ電流を供給するために、制御ユニットにより、前記制御可能な複数のスイッチング素子に作用する制御信号のクロックパターンを形成し、
唯一のシャント抵抗のみを介して電流を測定し、
前記制御信号のクロックパターンに応じて相電流の順次の電流測定のための測定窓を定め、
前記制御信号のクロックパターンを、充分な時間的大きさの測定窓が得られるように時間的にシフトし、
前記制御信号のクロックパターンを、電流測定に対して選択される相を考慮して選択する、
多相電流測定方法において、
前記電流測定により形成された目標ベクトルからの偏差がゼロまたは最小となるように前記相の選択を行い、
第1の電流測定によって生じた第1の電流測定ベクトルと第2の電流測定によって生じた第2の電流測定ベクトルとをベクトル加算して合成電流測定ベクトルを形成し、該合成電流測定ベクトルの位相を前記偏差の最小化のために選択する、
ことを特徴とする電流測定方法。
【請求項2】
制御可能な複数のスイッチング素子(4)により電気負荷(5)に対して所望の量だけ電流を供給するために、制御ユニットにより、前記制御可能な複数のスイッチング素子に作用する制御信号のクロックパターンを形成し、
唯一のシャント抵抗のみを介して電流を測定し、
前記制御信号のクロックパターンに応じて相電流の順次の電流測定のための測定窓を定め、
前記制御信号のクロックパターンを、充分な時間的大きさの測定窓が得られるように時間的にシフトし、
前記制御信号のクロックパターンを、前記相ベクトルの瞬時の回転角度位置を考慮して選択する、
相ベクトルを有する多相電流源の電流測定方法において、
前記電流測定によって生じた電流測定ベクトルを、前記瞬時の回転角度位置に応じて、前記相ベクトルとともに回転させる
ことを特徴とする電流測定方法。
【請求項3】
(n−1)×前記アナログディジタル変換器の最小変換時間W
を前記和に加算する、請求項1または2記載の電流測定方法。
【請求項4】
前記電流測定をサンプリング時間の終了時に行う、請求項1から3までのいずれか1項記載の電流測定方法。
【請求項5】
前記電流測定により形成された目標ベクトルからの偏差がゼロまたは最小となるように前記相の選択を行う、請求項2から4までのいずれか1項記載の電流測定方法。
【請求項6】
偏差を最小化するために、前記電流測定により形成された電流測定ベクトルの位相を選択する、請求項2から5までのいずれか1項記載の電流測定方法。
【請求項7】
前記電流測定により形成された電流測定ベクトルを相ベクトルとともに回転させる、請求項1、3または4のいずれか1項記載の電流測定方法。
【請求項8】
トルク調整ベクトルと場形成ベクトルとを合成して相ベクトルを形成する、請求項1から7までのいずれか1項記載の電流測定方法。
【請求項1】
制御可能な複数のスイッチング素子(4)により電気負荷(5)に対して所望の量だけ電流を供給するために、制御ユニットにより、前記制御可能な複数のスイッチング素子に作用する制御信号のクロックパターンを形成し、
唯一のシャント抵抗のみを介して電流を測定し、
前記制御信号のクロックパターンに応じて相電流の順次の電流測定のための測定窓を定め、
前記制御信号のクロックパターンを、充分な時間的大きさの測定窓が得られるように時間的にシフトし、
前記制御信号のクロックパターンを、電流測定に対して選択される相を考慮して選択する、
多相電流測定方法において、
前記電流測定により形成された目標ベクトルからの偏差がゼロまたは最小となるように前記相の選択を行い、
第1の電流測定によって生じた第1の電流測定ベクトルと第2の電流測定によって生じた第2の電流測定ベクトルとをベクトル加算して合成電流測定ベクトルを形成し、該合成電流測定ベクトルの位相を前記偏差の最小化のために選択する、
ことを特徴とする電流測定方法。
【請求項2】
制御可能な複数のスイッチング素子(4)により電気負荷(5)に対して所望の量だけ電流を供給するために、制御ユニットにより、前記制御可能な複数のスイッチング素子に作用する制御信号のクロックパターンを形成し、
唯一のシャント抵抗のみを介して電流を測定し、
前記制御信号のクロックパターンに応じて相電流の順次の電流測定のための測定窓を定め、
前記制御信号のクロックパターンを、充分な時間的大きさの測定窓が得られるように時間的にシフトし、
前記制御信号のクロックパターンを、前記相ベクトルの瞬時の回転角度位置を考慮して選択する、
相ベクトルを有する多相電流源の電流測定方法において、
前記電流測定によって生じた電流測定ベクトルを、前記瞬時の回転角度位置に応じて、前記相ベクトルとともに回転させる
ことを特徴とする電流測定方法。
【請求項3】
(n−1)×前記アナログディジタル変換器の最小変換時間W
を前記和に加算する、請求項1または2記載の電流測定方法。
【請求項4】
前記電流測定をサンプリング時間の終了時に行う、請求項1から3までのいずれか1項記載の電流測定方法。
【請求項5】
前記電流測定により形成された目標ベクトルからの偏差がゼロまたは最小となるように前記相の選択を行う、請求項2から4までのいずれか1項記載の電流測定方法。
【請求項6】
偏差を最小化するために、前記電流測定により形成された電流測定ベクトルの位相を選択する、請求項2から5までのいずれか1項記載の電流測定方法。
【請求項7】
前記電流測定により形成された電流測定ベクトルを相ベクトルとともに回転させる、請求項1、3または4のいずれか1項記載の電流測定方法。
【請求項8】
トルク調整ベクトルと場形成ベクトルとを合成して相ベクトルを形成する、請求項1から7までのいずれか1項記載の電流測定方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】

【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】

【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【公開番号】特開2013−68639(P2013−68639A)
【公開日】平成25年4月18日(2013.4.18)
【国際特許分類】
【出願番号】特願2013−4897(P2013−4897)
【出願日】平成25年1月15日(2013.1.15)
【分割の表示】特願2009−535650(P2009−535650)の分割
【原出願日】平成19年9月20日(2007.9.20)
【出願人】(390023711)ローベルト ボツシユ ゲゼルシヤフト ミツト ベシユレンクテル ハフツング (2,908)
【氏名又は名称原語表記】ROBERT BOSCH GMBH
【住所又は居所原語表記】Stuttgart, Germany
【Fターム(参考)】
【公開日】平成25年4月18日(2013.4.18)
【国際特許分類】
【出願日】平成25年1月15日(2013.1.15)
【分割の表示】特願2009−535650(P2009−535650)の分割
【原出願日】平成19年9月20日(2007.9.20)
【出願人】(390023711)ローベルト ボツシユ ゲゼルシヤフト ミツト ベシユレンクテル ハフツング (2,908)
【氏名又は名称原語表記】ROBERT BOSCH GMBH
【住所又は居所原語表記】Stuttgart, Germany
【Fターム(参考)】
[ Back to top ]