
電界検出方法、装置及び電界検出方法のプログラム並びに移動体位置等推定検出方法、装置及び移動体位置等推定検出方法のプログラム
【課題】海中等において、自然に発生する(浮遊)ノイズの影響に対処し、所望の物体、事象等に基づいて生じる電界を高精度に検出できる方法等を提供する。
【解決手段】電界を3軸方向の各成分で検知する電界検知器1と、磁界を3軸方向の各成分で検知する磁界検知器2と、海水の速度を3軸方向の各成分で計測する潮流計3と、各成分で検知した地磁気に基づく磁束密度及び海水の速度に基づいて、発生する誘導起電力に基づく演算を行って電界浮遊ノイズデータを生成する誘導起電力推定器6と、電界浮遊ノイズデータにより、電界に基づくデータを補正する電界信号データ補正部9aとを備えている。
【解決手段】電界を3軸方向の各成分で検知する電界検知器1と、磁界を3軸方向の各成分で検知する磁界検知器2と、海水の速度を3軸方向の各成分で計測する潮流計3と、各成分で検知した地磁気に基づく磁束密度及び海水の速度に基づいて、発生する誘導起電力に基づく演算を行って電界浮遊ノイズデータを生成する誘導起電力推定器6と、電界浮遊ノイズデータにより、電界に基づくデータを補正する電界信号データ補正部9aとを備えている。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ある場において所望する電界の強度だけを精度よく検出するための方法及び装置に関するものである。特に海中における電界検出に関するものである。さらに検出した電界に基づいて移動体の位置を検出する移動体位置検出方法等に関するものである。
【背景技術】
【0002】
電界の時間的変化を検出することにより、物体、事象等の様々な検知が従来から行われている。例えば、船舶が発する電界による信号の直交3軸成分に基づいて、移動目標の位置(偏奇量)を検出する方法もある(例えば特許文献1参照)。
【特許文献1】特開2000−304533号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
上記の方法では、海面に自然に発生している電界雑音(ノイズ)は存在しないものと仮定している。そして、この仮定に基づいて、移動体が海水中を移動する場合、検出する電界信号の時系列データは理論式で表すことができるものとし、最小自乗法等を用いて位置等を推定し、検出を行っている。
【0004】
しかしながら、地磁気を横切るように導電性媒質である海水が移動する(潮が流れる)と電磁誘導により誘導起電力が生じる。そして、電界センサが地磁気下の海水中にあると、その周辺に発生した誘導起電力を要因とする浮遊ノイズが、電界センサが検出する電界信号(の時系列データ)に重畳する。その結果、所望する物体、事象等により生じる電界の検出精度が低くなる。潮流速が速くなるほどノイズが多くなり、例えば潮流速が数m/sの環境下でも、位置等の推定検出において精度の低下を招いていた。また、浮遊ノイズのレベルによっては、所望する物体、事象等により生じる電界がノイズに埋もれてしまい、位置等の推定検出を行うことができない可能性もあった。このように、所望する電界以外にも、電界が生ずる要因があり、電界の検出精度を上げためには、常にノイズに対する対策を行っておく必要がある。これは、位置等の推定検出精度を上げるためにも必要である。
【0005】
そこで、本発明は上記のような問題点を解決し、特に海中において、自然に発生する(浮遊)ノイズの影響に対処し、所望の物体、事象等に基づいて生じる電界を高精度に検出できる方法等を提供することを目的とする。また、検出した電界に基づいて、高精度に移動体の位置等を推定、検出することができる方法等を提供することを目的とする。
【課題を解決するための手段】
【0006】
本発明に係る電界検出方法は、海中に設けられた手段により、少なくとも電界及び海水の速度を計測し、海水の速度並びに計測された又は定められた地磁気による磁束密度のデータに基づいて海水が地磁気を横切ることによって生じる誘導起電力に基づく値を算出する工程と、電界から誘導起電力に基づく値の成分を除去する工程とを有するものである。
【0007】
また、本発明に係る位置等推定検出方法は、海中に設けられた手段により、少なくとも電界及び海水の速度を時系列に計測していき、海水の速度並びに計測された又は定められた地磁気による磁束密度のデータに基づいて、海水が地磁気を横切ることによって生じる誘導起電力の値を算出し、電界から誘導起電力の成分を除去して、海面又は海中を航行する移動体により生じる電界のデータを算出する工程と、推定検出手段が、残差を用いた最小自乗法を適用して、移動体により生じる電界のデータの値が点電流源に係る理論式を満足するようなパラメータの値を決定し、決定したパラメータの値に基づいて少なくとも移動体の現在及び/又は将来の位置を推定検出する工程とを有するものである。
【0008】
また、本発明に係る位置等推定検出方法は、海中に設けられた手段により、少なくとも電界及び海水の速度を時系列に計測していき、海水の速度並びに計測された又は定められた地磁気による磁束密度のデータに基づいて、海水が地磁気を横切ることによって生じる誘導起電力の値を算出し、電界から誘導起電力の成分を除去して、海面又は海中を航行する移動体により生じる電界のデータを算出する工程と、推定検出手段が、移動体により生じる電界成分と海水面及び海底面を境界として仮想的に設定した鏡像電極に基づく電界成分との和で表す式を満足するようなパラメータの値を決定し、決定したパラメータの値に基づいて少なくとも移動体の現在及び/又は将来の位置を推定検出する工程とを有するものである。
【0009】
また、本発明に係る位置等推定検出方法では、海水及び海底の電気伝導度を含むパラメータについて、さらに値を決定する。
【0010】
また、本発明に係る位置等推定検出方法で用いる最小自乗法にはガウス・ニュートン法を適用する。
【0011】
また、本発明に係る位置等推定検出方法は、移動体の速度及び電界の信号の受信位置との最接近位置をさらに推定検出する。
【0012】
また、本発明に係る位置等推定検出方法は、電界の強度又はパラメータの値に基づいて移動体又はその種別を判断する。
【0013】
また、本発明に係る電界検出装置は、電界を3軸方向の各成分で検知する電界検知手段と、海水の速度を3軸方向の各成分で計測する潮流計測手段と、海水の速度並びに計測された又は定められた地磁気による磁束密度の各成分のデータに基づいて、発生する誘導起電力に基づく演算を行って電界浮遊ノイズデータを生成する誘導起電力推定手段と、電界浮遊ノイズデータにより、電界に基づくデータを補正する電界補正手段とを備えたものである。
【0014】
また、本発明に係る電界検出装置は、 磁界を3軸方向の各成分で検知する磁界検知手段をさらに備え、誘導起電力推定手段は、磁界に基づく地磁気による磁束密度の各成分のデータにより演算を行うものである。
【0015】
また、本発明に係る位置等推定検出装置は、電界を3軸方向の各成分で検知する電界検知手段と、海水の速度を3軸方向の各成分で計測する潮流計測手段と、海水の速度並びに計測された又は定められた地磁気による磁束密度の各成分のデータに基づいて、発生する誘導起電力を電界浮遊ノイズデータとして演算する誘導起電力推定手段と、電界検知手段が検知した電界のデータ及び電界浮遊ノイズデータを時系列に記録するデータ記録手段と、電界浮遊ノイズデータにより電界に基づくデータを補正する電界補正手段と、電界補正手段が補正した電界のデータの値が、点電流源に係る電界の理論式を満足するように、あらかじめ定めた収束条件を満たすまで、残差を用いた最小自乗法による反復計算を行ってパラメータの値を決定し、決定したパラメータの値に基づいて少なくとも移動体の現在及び/又は将来の位置を推定検出する検出手段とを備えたものである。
【0016】
また、本発明に係る位置等推定検出装置は、電界を3軸方向の各成分で検知する電界検知手段と、海水の速度を3軸方向の各成分で計測する潮流計測手段と、海水の速度並びに計測された又は定められた地磁気による磁束密度の各成分のデータに基づいて、発生する誘導起電力を電界浮遊ノイズデータとして演算する誘導起電力推定手段と、電界検知手段が検知した電界のデータ及び電界浮遊ノイズデータを時系列に記録するデータ記録手段と、電界浮遊ノイズデータにより電界に基づくデータを補正する電界補正手段と、電界補正手段が補正した電界のデータの値が、移動体である海面又は海中を航行する船舶から直接発せられる電界成分と海水面及び海底面を境界として仮想的に設定した鏡像電極に基づく電界成分との和で表す式を満足するようなパラメータの値を、残差を用いた最小自乗法を適用して決定し、決定したパラメータの値に基づいて少なくとも移動体の現在及び/又は将来の位置を推定検出する検出手段とを備えたものである。
【0017】
また、本発明に係る電界検出装置は、 磁界を3軸方向の各成分で検知する磁界検知手段をさらに備え、誘導起電力推定手段は、磁界に基づく地磁気による磁束密度の各成分のデータにより演算を行うものである。
【0018】
また、本発明に係る位置等推定検出装置の検出手段は、パラメータの値に基づいて移動体の速度及び検知手段との最接近位置をさらに推定検出する。
【0019】
また、本発明に係る位置等推定検出装置の検出手段は、物理量の大きさ又はパラメータの値に基づいて、移動体又はその種別を判断する。
【0020】
また、本発明に係る電界検出方法のプログラムは、(計測された又は定められた地磁気による磁束密度並びに)海中に設けられた手段から得られた少なくとも海水の速度のデータに基づいて、海水が地磁気を横切ることによって生じる誘導起電力に基づく値をデータとして算出する工程と、海中の電界のデータから前記誘導起電力に基づく値の成分を除去して補正した前記電界のデータを算出する工程とをコンピュータに行わせるものである。
【0021】
また、本発明に係る位置等推定検出方法のプログラムは、(計測された又は定められた地磁気による磁束密度並びに)海中に設けられた手段から得られた少なくとも海水の速度のデータに基づいて、海水が地磁気を横切ることによって生じる誘導起電力の値を算出し、海中の電界のデータから誘導起電力の成分を除去して、海面又は海中を航行する移動体により生じる電界をデータとして時系列に算出する工程と、残差を用いた最小自乗法を適用して、移動体により生じる電界のデータの値が点電流源に係る理論式を満足するようなパラメータの値を決定し、決定したパラメータの値に基づいて少なくとも移動体の現在及び/又は将来の位置を推定検出する工程とをコンピュータに行わせるものである。
【0022】
また、本発明に係る位置等推定検出方法のプログラムは、(計測された又は定められた地磁気による磁束密度並びに)海中に設けられた手段から得られた少なくとも海水の速度のデータに基づいて、海水が地磁気を横切ることによって生じる誘導起電力の値を算出し、海中の電界のデータから誘導起電力の成分を除去して、海面又は海中を航行する移動体により生じる電界をデータとして時系列に算出する工程と、移動体により生じる電界成分と海水面及び海底面を境界として仮想的に設定した鏡像電極に基づく電界成分との和で表す式を満足するようなパラメータの値を決定する工程と、決定したパラメータの値に基づいて、少なくとも移動体の現在及び/又は将来の位置を推定検出する工程とをコンピュータに行わせるものである。
【0023】
また、本発明に係る位置等推定検出方法のプログラムは、海水及び海底の電気伝導度を含むパラメータに対する値の決定をさらにコンピュータに行わせる。
【0024】
また、本発明に係る位置等推定検出方法のプログラムは、パラメータの値に基づいて移動体の速度及び電界の信号の受信位置との最接近位置の推定検出をさらにコンピュータに行わせる。
【0025】
また、本発明に係る位置等推定検出方法のプログラムは、電界の強度又はパラメータの値に基づいて移動体又はその種別の判断をさらにコンピュータに行わせる。
【発明の効果】
【0026】
本発明によれば、海中での電界検知において、その電界においてノイズとなる海水が地磁気を横切ることによって生じる誘導起電力に基づく値を算出し、除去することで、より精度の高い電界検出を行うことができる。これにより、例えば電界検出による移動体の位置推定、地震予知等の精度を高めることができる。
【0027】
また、本発明によれば、海水が地磁気を横切ることによって生じる誘導起電力に基づく成分を除去した上で、移動体により生じる電界を時系列にした電界データから、推定検出手段が、点電流源に係る理論式を満足するようなパラメータの値を決定し、決定したパラメータの値に基づいて少なくとも移動体の現在及び/又は将来の位置を推定検出するようにしたので、精確に位置等の推定、検出を行うことができる。
【0028】
また、本発明によれば、海水が地磁気を横切ることによって生じる誘導起電力に基づく成分を除去した上で、移動体により生じる電界を時系列にした電界データから、推定検出手段が、移動体から直接発せられる電界成分と海水面及び海底面を境界として仮想的に設定した鏡像電極に基づく電界成分との和で表す式を満足するようなパラメータの値を決定し、決定したパラメータの値に基づいて少なくとも移動体の現在及び/又は将来の位置を推定検出するようにしたので、より現実に近い結果を得るようにし、精確に位置等の推定、検出を行うことができる。
【0029】
また、本発明によれば、海水面及び海底面を境界として鏡像電極を設定する際に、海底の電気伝導度に関するパラメータを加え、その値を決定するようにしたので、決定した値に基づいて、移動体の方向の修正も確実に行うこともできる。
【0030】
また、本発明によれば最小自乗法にガウス・ニュートン法を適用するようにしたので、計算時間の短縮を図りつつ、収束安定性のよい最小自乗法を適用し、位置等の推定検出をすばやく高精度に行うことができる。
【0031】
また、本発明によれば、決定したパラメータの値に基づいて、移動体の速度及び2以上の物理量の信号の受信位置との最接近位置(最小距離)をさらに推定検出することができる。
【0032】
また、本発明によれば、物理量の大きさ又はパラメータの値とそれに対応した移動体又はその種別の特徴とを例えばデータベース化しておくことで、得られた信号、パラメータの値に基づいて移動体又はその種別も判断することができる。
【0033】
本発明によれば、海中での電界検知において、誘導起電力推定手段が、その電界においてノイズとなる海水が地磁気を横切ることによって生じる誘導起電力に基づく値を算出して電界浮遊ノイズデータを生成し、電界補正手段が、電界浮遊ノイズデータにより電界に基づくデータを補正し、ノイズの影響を除去することで、より精度の高い電界検出を行うことができる。これにより、例えば電界検出による移動体の位置推定、地震予知等の精度を高めることができる。
【0034】
また、本発明によれば、磁界検知手段が検知した磁界から得られた地磁気による磁束密度の各成分のデータに基づいて誘導起電力推定手段が電界浮遊ノイズデータを生成するようにしたので、より実測に基づく演算により高精度の演算が期待できる。
【0035】
また、本発明によれば、誘導起電力推定手段が、海水が地磁気を横切ることによって生じる誘導起電力に基づく値を算出して電界浮遊ノイズデータを生成し、電界補正手段が、電界浮遊ノイズデータにより補正した電界に基づくデータから、推定検出手段が、点電流源に係る理論式を満足するようなパラメータの値を決定し、決定したパラメータの値に基づいて少なくとも移動体の現在及び/又は将来の位置を推定検出するようにしたので、精確に位置等の推定、検出を行うことができる。特に検知手段と移動体との距離が近い場合において、位置等の推定、検出を行うには有効である。
【0036】
また、本発明によれば、誘導起電力推定手段が、海水が地磁気を横切ることによって生じる誘導起電力に基づく値を算出して電界浮遊ノイズデータを生成し、電界補正手段が、電界浮遊ノイズデータにより補正した電界に基づくデータから、推定検出手段が、移動体から直接発せられる電界成分と海水面及び海底面を境界として仮想的に設定した鏡像電極に基づく電界成分との和で表す式を満足するようなパラメータの値を決定し、決定したパラメータの値に基づいて少なくとも移動体の現在及び/又は将来の位置を推定検出するようにしたので、より現実に近い結果を得るようにし、精確に位置等の推定、検出を行うことができる。
【0037】
また、本発明によれば、磁界検知手段が検知した磁界から得られた地磁気による磁束密度の各成分のデータに基づいて誘導起電力推定手段が電界浮遊ノイズデータを生成するようにしたので、より実測に基づく演算により高精度の演算が期待できる。
【0038】
また、本発明によれば、検出手段が、決定したパラメータの値に基づいて、移動体の速度及び電界信号の受信位置との最接近位置(最小距離)をさらに推定検出することで、位置以外の情報をさらに得ることができる。
【0039】
また、本発明によれば、検出手段に物理量の大きさ又はパラメータの値とそれに対応した移動体又はその種別の特徴とを例えばデータベース化しておけば、得られた信号、パラメータの値に基づいて移動体又はその種別というさらに詳細な情報を得ることができる。
【0040】
本発明によれば、海中での電界検知において、その電界においてノイズとなる海水が地磁気を横切ることによって生じる誘導起電力に基づく値を算出し、除去するプログラムをコンピュータに実行させるようにしたので、より精度の高い電界検出を行うことができる。これにより、例えば電界検出による移動体の位置推定、地震予知等の精度を高めることができる。
【0041】
また、本発明によれば、海水が地磁気を横切ることによって生じる誘導起電力に基づく成分を除去した上で、移動体により生じる電界を時系列にした電界データから、点電流源に係る理論式を満足するようなパラメータの値を決定し、決定したパラメータの値に基づいて少なくとも移動体の現在及び/又は将来の位置を推定検出させるようなプログラムをコンピュータに実行させるようにしたので、精確に位置等の推定、検出を行うことができる。特に検知手段と移動体との距離が近い場合において、位置等の推定、検出を行うには有効である。
【0042】
また、本発明によれば、海水が地磁気を横切ることによって生じる誘導起電力に基づく成分を除去した上で、移動体により生じる電界を時系列にした電界データから、移動体から直接発せられる電界成分と海水面及び海底面を境界として仮想的に設定した鏡像電極に基づく電界成分との和で表す式を満足するようなパラメータの値を決定し、決定したパラメータの値に基づいて少なくとも移動体の現在及び/又は将来の位置を推定検出させるようなプログラムをコンピュータに実行させるようにしたので、より現実に近い結果を得るようにし、精確に位置等の推定、検出を行うことができる。
【0043】
また、本発明によれば、海水面及び海底面を境界として鏡像電極を設定する際に、海底の電気伝導度に関するパラメータを加え、その値をコンピュータに決定させるようにしたので、決定した値に基づいて、移動体の方向の修正も確実に行うこともできる。
【0044】
また、本発明によれば、パラメータの値に基づいて移動体の速度及び物理量の受信位置との最接近位置の推定検出をさらにコンピュータに行わせるようにしたので、位置以外の情報を得ることができる。
【0045】
また、本発明によれば、移動体位置等推定検出方法のプログラムは、物理量の大きさ又はパラメータの値に基づいて移動体又はその種別の判断をさらにコンピュータに行わせるようにしたので、位置以外のさらに詳細な情報を得ることができる。
【発明を実施するための最良の形態】
【0046】
実施の形態1.
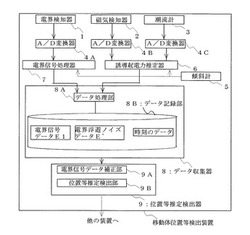
図1は本発明の第1の実施の形態に係る電界検出装置を一部に有する移動体位置等検出装置の構成ブロック図である。ここで、本実施の形態では、海面又は海中を移動する航走体を移動体と想定して説明する。そのため、移動体位置等検出装置は海中(海底も含む)に設けられている。そして、電気を伝導する媒質は海水であるものとする(したがって、電界検知器1は海中の電界強度を信号として検知する)。また、移動体は等速直線運動を行っているものとする。移動体位置等検出装置(特に電界検知器1)が設けられている場所については、特に限定するものではないが、海水の塩分濃度が安定している場所だと電界等の検知精度をさらに高くし、移動体の位置等の推定、検出の精度も高めることができる。
【0047】
図1において、電界検知器(電界センサ)1は電界強度を信号として検知(受信)し、電気信号(以下、電界信号という)に変換する(場合によっては、検知した他の電気的物理量に基づく信号に基づいて電界強度を算出した電気信号を電界信号とすることもある。また、光信号に変換した後に電気信号に変換する場合もある)。ここで、電界検知器1とは、各々直交する3つの検知手段を有する検知器又は3軸センサを表す検知器であり、直交(相対)座標系の3軸方向での検知ができるものとする。
【0048】
また、磁気検知器(磁気センサ)2も、磁界(磁束密度)を信号として検知(受信)し、電気信号(以下、磁界信号という)に変換する(場合によっては、検知した他の磁気的物理量に基づく信号に基づいて磁束密度を算出した電気信号を磁界信号とすることもある)。磁気検知器2も、電界検知器1と同様に直交座標系の3軸方向での検知ができるものとする。本実施の形態では、主に電界検知器1に発生する誘導起電力を算出するための演算に用いる。
【0049】
潮流計3は、海水の移動速度(海潮流の速度)を計測し、電気信号(以下、潮流信号という)に変換する。潮流計3についても、3軸方向における速度のそれぞれの成分を潮流信号として送信できるものとする。A/D変換器4a、4b及び4cは、例えばサンプリング等の処理を施して、それぞれ電界信号、磁界信号及び潮流信号をデジタルデータの信号に変換する(以下、各信号に基づくデータを電界信号データ、磁界信号データ及び潮流データという)。ここで、電界検知器1及び磁気検知器2の距離は、装置と移動体との間の距離に比べ、無視できるほど小さいので、それぞれの座標系の原点が同じである(同位置にある)ものとする。また、電界検知器1、磁気検知器2及び潮流計3については、3軸の方向(座標系)が同じであるとする。
【0050】
傾斜計5は、例えば海面に対して鉛直な方向をZ軸としたときに、移動体位置等検出装置(特に電界検知器1、磁気検知器2、潮流計3)の傾斜の程度を計測し、計測に基づくデータを含む信号(以下、このデータを傾斜データという)を、誘導起電力推定器6及び電界信号処理器7に送信する。そして、誘導起電力推定器6は、傾斜データに基づいて潮流データ及び磁界信号データを補正し、補正したデータにより、海水の流れにより生じる誘導起電力の値を推定演算し、電界浮遊ノイズ推定データとしてデータ収集器8に記録させる。また、電界信号処理器7は、傾斜データに基づいて電界信号データを補正し、その電界信号データをデータ収集器8に記憶させる(ここで、以後の説明では、電界信号データ、磁界信号データ及び潮流データは、傾斜による影響を受けていない状態のデータであるものとする)。
【0051】
データ収集器8は、データ処理部8Aとデータ記録部8Bで構成される。データ処理部8Aは、いわゆるデータベース管理システム(DBMS)である。電界信号データ及び電界浮遊ノイズ推定データと時刻データとを関連づける処理を行う。また、データ記録部8Bは記録装置(手段)で構成されており、電界信号データ、電界浮遊ノイズ推定データ及び時刻データを少なくとも一定時間分又は一定個数分記録する。このデータ収集器8はいわゆるデータベースの役割を果たす。
【0052】
位置等推定検出器9は、電界信号データ補正部9a及び位置等推定検出部9bで構成される。電界信号データ補正部9aは、電界信号データ及び電界浮遊ノイズ推定データに基づいて演算を行い、電界信号補正データを生成する。また、位置等推定検出部9bは、電界信号補正データに基づいて移動体の位置等を推定演算し、検出を行う。
【0053】
ここで、誘導起電力推定器6、電界信号処理器7、位置等推定検出器9は例えばCPU(Central Prosessing Unit )を中心としたコンピュータ等のような制御演算処理手段で構成されている。そして、位置等の推定演算処理手順をあらかじめプログラム化したものを制御演算処理手段が実行し、そのプログラムに基づく処理を行うことで、後述する各式に基づく加減乗除等の演算を行い、さらに演算結果に基づいて収束等を判断することにより位置等の推定を実現する。ここではそれぞれ別の機器(手段)として構成しているが、例えば、各器が行うプログラムに基づく処理を1つの制御演算処理装置により行うようにしてもよい。
【0054】
なお、本実施の形態の装置において必須の手段ではないが、接近検知器、移動検知器を設け、移動体の接近、移動を判断し、例えばデータ収集器8において、電界信号の記録開始又は終了等を制御することもできる。また、深度計を電界検知器1の近辺に備えることで、移動体が水面上を走行する船舶の場合は、例えばZ軸方向の距離である深度(高さ)を計測し、既知の値として用いることができる。そのため、後述するパラメータ(未知の変数)の数を少なくすることができる。
【0055】
本実施の形態では、例えば移動体が発する電流等により生じる電界の強度に基づいて移動体の位置等の推定を行うが、海中においては自然現象により電界を発生させる要因が存在する。例えば、導電体である海水が例えば潮流として移動し、地磁気(地球による磁界)を横切ることで誘導起電力が発生する。この誘導起電力が移動体により生じる電界に対するノイズとなり、海中(又は海底)の電界検知器1による電界信号に加わるため、この電界信号に基づく電界信号データによる位置等の推定は、精度が低くなる。
【0056】
そこで、本実施の形態では、装置が設けられた位置における海水(導電体)の速度(潮流計3により得られる潮流データ)と装置が設けられた位置における地磁気による磁束密度(磁気検知器2により得られる磁界信号データ)とに基づいて誘導起電力推定器6が推定演算を行い、誘導起電力(これを誘導起電力eとする)を時系列に算出する。この誘導起電力eの成分が電界検知器1に基づく電界信号に含まれる電界浮遊ノイズであるとして、誘導起電力eに基づく電界浮遊ノイズデータ(この値をE’とする)を生成し、データ収集器8に記録させる。
【0057】
誘導起電力推定器6が推定演算する誘導起電力eは、地磁気による磁束密度B及び潮流速(海水の速度)vに基づいて次式(1)で表される。ここで、磁束密度B及び潮流速vはベクトルであり、誘導起電力eは磁束密度Bと潮流速vとの外積となる。また誘導起電力eもベクトルである。ここで、磁束密度B、潮流速v、誘導起電力eの方向は互いに直交する(フレミングの右手の法則)。
【0058】
【数1】

【0059】
一方、電界信号処理器7により電界信号データ(この値をE1とする)もデータ収集器8に記録される。そして、電界信号データ補正部9aが、E1及びE’に基づいて、各時刻における補正した電界(移動体により生じる電界)を次式(2)に基づいて算出し、電界信号補正データ(この値をEとする)とする。ここで、E、E1及びE’は3次元のベクトルである。
E=E1−E’ …(2)
【0060】
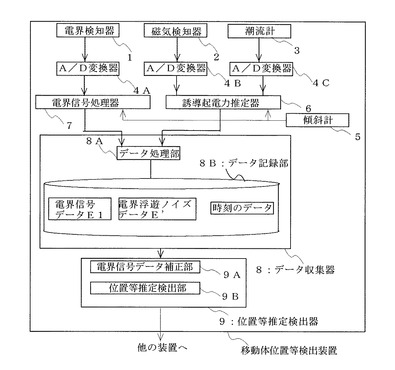
図2は移動体の位置と移動体により生じる電界信号との関係を表す図である。海水は電解質溶液であるために海水中に異種金属が存在すると、電位差を生じる。この場合、イオン化傾向が大きい金属からイオン化傾向が小さい金属に電流が流れ、陽極表面が腐食する。船舶においては、例えば船体外板が陽極(鉄鋼)、プロペラが陰極(銅合金等)となり、プロペラ主軸を介して船体外板へ電流が戻ってくることにより閉回路が構成される。この電流が腐食電流である。また、このような腐食電流による金属の腐食を防止するため、防食電流を流すこともある。そのため、例えば海水に電流を流すための保護亜鉛や白金等の陽極電極が船体に設けられる。また、船尾部分に設けられているプロペラ、舵等は、海水を介して電流が流れ込む(電流を吸い込む)ための陰極電極として機能する。そして、これらは海水を流れる電流に対して、電流源(以下、点電流源という)となる。
【0061】
電界検知器1と移動体との距離が遠い又は陽極電極と陰極電極との間隔が短ければ、点電流源を双極子(ダイポール)とみなしてダイポールモーメントによる理論式を用いることができる。そうでない場合、現実の条件と式とが乖離してしまい、実測値に基づいて決定したパラメータの値が真の値と大きく外れ、精確な移動体の位置等の検出ができなくなる(実際に距離が近づくほど、高精度な位置等の推定検出が要求される場合もある)。本実施の形態では、単極子である点電流源に合わせた計算を行うことで、現実に沿った式に基づいて精確な移動体の位置等の検出を行う。位置等の検出には最小自乗法(特に非線形最小自乗法である。以下、単に最小自乗法を用いる。具体的には、理論により得られた値と実測した信号から得られた値の残差の自乗和が最小となるように、反復計算を行い、所定の収束条件を充たしたものと判断したときのパラメータの値に基づいて、位置等の算出を行う。
【0062】
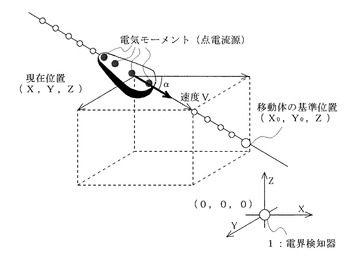
図3は移動体と点電流源との関係を表す図である。電界検知器1の直上近傍を移動体が等速直線運動で移動する場合、移動体に設けられた点電流源による電界信号の3軸成分(EX ,EY ,EZ )は、次式(3)〜(5)で表される。
【0063】
EX =ΣIσi・Xi/(Xi2+Yi2+Zi2)3/2 …(3)
Ey =ΣIσi・Yi/(Xi2+Yi2+Zi2)3/2 …(4)
Ez =ΣIσi・Zi/(Xi2+Yi2+Zi2)3/2 …(5)
【0064】
ここで、基準位置から第1の点電流源の位置X1 ,Y1 を、
X1 =X0 +Vcosα・t …(6)
Y1 =Y0 +Vsinα・t …(7)
とし、
Xi =X1 +di ・cosα・t …(8)
Yi =Y1 +di ・sinα・t …(9)
とする。
【0065】
ただし、
X0 ,Y0 :基準位置
i :点電流源の個数(1,2,…)
Iσi:Ii /4πσ1
Ii :各点電流源の電流量
σ1 :海水の電気伝導度(導電率)
t :時間
V :移動体速度
di :第1の点電流源と各点電流源との船体長方向の間隔(1,2,…,i−1)
Zi :電界検知器1からの移動体の高さ(水上を走行する船舶ではほぼ水深と同じ)
α :電界検知器1のX軸方向と移動体の移動方向とのなす角
を表す。ここで、点電流源Iを点電荷Qとして見た場合、点電流源Iと点電荷QとはI=σ・Q/εの関係となる。εは誘電率である。また、ΣIi =0、すなわち各点電流源の総和は0となる。
【0066】
以上のようにして得られた電界の理論式において、実測した電界信号に基づく値との整合を図るために決定するパラメータ(未知)は、次式(10)のように設定される。ここで、前述したように、水深計により海面までの距離が既知であり、これにより移動体までのZ軸方向の距離が既知の場合はZi をパラメータに含めなくてもよい。
ae =(Iσi,di ,X0 ,Y0 ,Zi ,V,α) …(10)
【0067】
位置等推定検出部9bは、実際の検知により得られた電界に基づく値(電界信号補正データの値E)が理論式を満足させるために最小自乗法により各パラメータを調整してパラメータの値を決定し、決定した値に基づいて移動体の位置を推定、検出する。最小自乗法を適用する際には、パラメータに対して初期値を与え、計算を行う。例えば、基準位置X0 ,Y0 については、X0 =0、Y0 =0(電界検知器1の直上)を初期値とする。ここで、X0 =0、Y0 =0は推定値ではあるが、実際のX0 ,Y0 に概ね近い値であるので、良好な算出結果を得ることができる。最小自乗法には様々な方法があるが、本実施の形態ではガウス・ニュートン法を適用する。ここでは計算時間と収束安定性とのバランス、関数との関係等を考慮した上で、ガウス・ニュートン法を基本としたレーベンベルグ・マルカート(Levenberg-Marquardt )法を用いて行うことを想定しているが、ダンピング法、パウエル法等、ガウス・ニュートン法に基づく他の解法を用いてもよい。また、ガウス・ニュートン法でなくても、最急降下法等、他の非線形最小自乗法の解法を用いてもよい。電界信号(電界信号のデータ)に適用すると、次式(11)〜(13)が成立する。
【0068】
PetPe ・Δae =−Petre …(11)
PetPe =Pext Pex+Peyt Pey+Pezt Pez …(12)
Petre =Pext rex+Peyt rey+Pezt rez …(13)
【0069】
ただし、
Pex:x軸方向の電界信号の各パラメータの一階微分からなる行列
Pey:y軸方向の電界信号の各パラメータの一階微分からなる行列
Pez:z軸方向の電界信号の各パラメータの一階微分からなる行列
re :残差の自乗和
Δae :パラメータの修正値
である。
【0070】
そして、位置等推定検出部9bは、(13)式における残差の自乗和が所定の収束条件を満たすまで(例えば残差の自乗和が所定の値以下になる又は自乗和の変化率の減少が所定の値以下になるまで)反復計算を行う。ここで反復計算に当たり、移動体が最接近すると判断するまでの間は、実際の信号によって得られた電界信号補正データに基づいて算出された値を、次の反復計算を行う際のX0 ,Y0 の初期値として用いる。そして、収束条件を満たし、決定されたパラメータ(X0 ,Y0 )に基づいて、CPA(Closest Point of Approach :最接近位置(t=0における位置))を推定、検出する。さらに決定したパラメータV、α、di の値を(6)、(7)式や(8)、(9)式に代入することで、移動体の現在位置及び各点電流源の位置(船尾等)を推定、検出できる。また、移動体は等速直線運動をしているものと扱っているため、推定検出した現在位置、速度に基づいて、将来の位置についても予測(推定、検出)することができる。
【0071】
また、例えば移動体から発生される電気的物理量、パラメータの値等のデータと移動体又はその種別のデータとを関連づけておけば、電界信号補正データ、決定したパラメータの値から、移動体又はその種類を特定することもできる。
【0072】
以上のように、第1の実施の形態によれば、導体である海水が地磁気を横切ることで発生する誘導起電力eを、磁気検知器2からの磁界信号及び潮流計3からの潮流信号に基づいて、誘導起電力推定器6が推定演算し、この誘導起電力eの成分が、電界検知器1からの電界信号に含まれる電界浮遊ノイズであるとして、電界信号データ補正部9aが、電界信号から電界浮遊ノイズの成分を除去した電界信号補正データEを生成するようにしたので、自然現象により発生するノイズの成分を電界信号から除去した上で、補正したデータの値に基づいて位置推定等の演算を行うことができ、より精度の高い位置等の推定を行うことができる。
【0073】
そして、電界信号補正データに基づいて、位置等推定検出部9bが、より現実に近い結果を得るように、船舶の点電流源から流れる電流により生じる電界の理論式を用いて、最小自乗法を適用して電界信号に基づく値を満足するようにパラメータの値を決定し、決定した値に基づいて移動体の現在及び/又は将来の位置を推定検出するようにしたので、精確に位置等の推定、検出を行うことができる。特に電界検知器1と移動体との距離が近い場合に、位置等の推定、検出を行うには有効である。
【0074】
また、移動体の現在及び/又は将来の位置を推定検出するだけでなく、決定したパラメータの値に基づいて最接近位置、速度等も推定検出するようにすれば、移動体に関する詳細なデータを推定し、得ることができる。そして、例えば移動体による電界強度、パラメータの値等のデータと移動体又はその種別のデータとを関連づけておけば、得られた電界信号のデータ、決定したパラメータの値から、移動体又はその種類を特定することもできる。さらに、プロペラ等が点電流源となるため、船尾の位置を特定することが可能である。そして、例えば磁界等の信号に基づいて、船首の位置を特定することができれば船体長を推定することができるし、移動体又はその種類を特定することもできる。
【0075】
さらに、最小自乗法の解法としてガウス・ニュートン法、特にレーベンベルグ・マルカート法又は修正マルカート法を用いるようにしたので、計算時間の短縮を図りつつ、収束安定性のよい最小自乗法を適用し、位置等の検出をすばやく高精度に行うことができる。
【0076】
実施の形態2.
上述の実施の形態では、(1)式に基づいて誘導起電力eの推定演算を行い、この値が電界信号に含まれる電界浮遊ノイズと同じ値であるとしてその後の演算を行った。ここで、例えば、電界検知器1の形状等によっては、単純に(1)式に当てはめて推定算出した誘導起電力eの値を、そのまま電界信号に含まれる電界浮遊ノイズの成分と同じものとして扱うわけにはいかない場合がある。そこで、例えば電界検知器1の形状等に応じた補正係数l(lx ,ly ,lz )を定め、次式(14)に示すように誘導起電力eに乗じて補正を行うようにする。そして、補正後の誘導起電力eの成分を時系列に推定した電界浮遊ノイズデータを生成する。これにより、電界検知器1の形状等、環境に応じた電界浮遊ノイズE’の値を算出することができる。ここで、
E’x =lx ・ex
E’y =ly ・ey …(14)
E’z =lz ・ez
【0077】
実施の形態3.
上述の実施の形態では、磁気検知器2からの磁界信号に基づく磁界信号データの値を装置が設けられた位置における地磁気の値とし、磁界信号データ及び潮流データに基づいて誘導起電力eを算出した。本発明はこれに限定するものではない。
【0078】
ここで、厳密には、装置が設けられた位置における地磁気も一定ではなく、変化することが多いが、地磁気の変動のみによる海水との間の相対的な速度変化によっては、電界浮遊ノイズとなり得る誘導起電力eは発生しないと考えられる。また、例えば、磁気嵐等による変動が無視できるほど小さいものであれば、例えば、誘導起電力推定器6が、あらかじめ装置を設ける位置における地磁気に関するデータを磁界信号データとして記憶しておき、潮流計3による潮流データに基づいて、実施の形態1と同様に間で誘導起電力eを推定演算を行うようにしてもよい。
【0079】
実施の形態4.
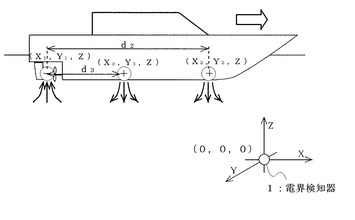
図4は船体における点電流源(電極)に対する鏡像点電流源(鏡像電極)を表す図である。海水中に生じる電界(これが電界信号となる)は、海水と誘電率(電気伝導率)が異なる大気及び海底の境界(海水面及び海底面)の影響を最も大きく受けることが考えられる。そこで、鏡像理論を利用して船体における点電流源に対する鏡像点電流源を仮想的において、すべての点電流源により生じる電界の和を海水に生じる電界(電界信号)とする(船体壁、海水温度等が電界に影響を与えることもあると考えられるが、すべての影響を考慮することは困難であり、また、無視できる程度の影響であるため、ここでは省略する)。
【0080】
ここで、鏡像理論とは、例えば2種類の異なる誘電媒体(海水と大気、海水と海底)が界面(海水面、海底面)で接しているような場合に、一方の媒体中の電荷(点電流源、電極)によって生じる電界を、境界条件を考慮して直接解かず、実際には電荷のないもう一方の媒体中に仮想的に電荷(点電流源、電極)を設けて電界を求める手法である。この場合、境界条件を乱さずに電界を求めることができる。
【0081】
本実施の形態では、仮想的に鏡像点電流源を設けて(置いて)電界の理論値を計算をすることで実測値との間のずれを少なくし、さらに精確な位置検出等を行う。位置等推定検出部9bの処理は異なるものの、第1の実施の形態の移動体位置等検出装置と構成は同じであるので、本実施の形態でも図1を用いて説明する。
【0082】
本実施の形態では(a)船体における各点電流源Aに対して、
(b) (a)の点電流源と海水面を挟んで対になる鏡像点電流源(以下、鏡像点電流源Bという)
(c) (a)の点電流源と海底面を挟んで対になる鏡像点電流源(以下、鏡像点電流源Cという)
(d) (b)の鏡像点電流源と海底面を挟んで対になる鏡像点電流源(以下、鏡像点電流源Dという)
の3つの鏡像点電流源を仮想的に置いてそれぞれの点電流源に係る電界を算出することとする。その他の条件に基づく鏡像点電流源も考えられるが、無視できるほど小さい値であるものとしてここでは省略する(鏡像点電流源Dも、場合によっては無視できることもある)。
【0083】
船体に設けた点電流源(電極)における電流値をIA (第1の実施の形態におけるIi )とすると、仮想的点電流源の電流値IB は次式(15)で表される。同様に、電流値IC 電流値ID は次式(16)、(17)で表される。ここで、本実施の形態では、第1の実施の形態で説明した(3)〜(5)で表される電界の各成分を(EAx,EAy,EAz)として表すことにする。
IB =(σ1 −σ2 )IA /(σ1 +σ2 ) …(15)
IC =(σ1 −σ3 )IA /(σ1 +σ3 ) …(16)
ID =(σ1 −σ2 )IA /(σ1 +σ2 ) …(17)
【0084】
また、(15)〜(17)式に基づいて考えると、鏡像点電流源Bにより生じる電界は次式(18)〜(20)で表される。
EBx={(σ1 −σ2 )Iσi/(σ1 +σ2 ) }・Xi
/{Xi2+Yi2+(−Zi)2}3/2 …(18)
EBy={(σ1 −σ2 )Iσi/(σ1 +σ2 )}・Yi
/{Xi2+Yi2+(−Zi)2}3/2 …(19)
EBZ={(σ1 −σ2 )Iσi/(σ1 +σ2 )}・(−Zi)
/{Xi2+Yi2+(−Zi)2}3/2 …(20)
【0085】
同様に、鏡像点電流源Cにより生じる電界は次式(21)〜(23)で表される。
ECx={(σ1 −σ3 )Iσi/(σ1 +σ3 )}・Xi
/{Xi2+Yi2+(2Zs−Zi)2}3/2 …(21)
ECy={(σ1 −σ3 )Iσi/(σ1 +σ3 )}・Yi
/{Xi2+Yi2+(2Zs−Zi)2}3/2 …(22)
ECZ={(σ1 −σ3 )Iσi/(σ1 +σ3 )}・(2Zs−Zi)
/{Xi2+Yi2+(2Zs−Zi)2}3/2 …(23)
【0086】
さらに、鏡像点電流源Dにより生じる電界は次式(24)〜(26)で表される。
EDx={(σ1 −σ2 )Iσi/(σ1 +σ2 )}・Xi
/{Xi2+Yi2+(Zi−2Zs)2}3/2 …(24)
EDy={(σ1 −σ2 )Iσi/(σ1 +σ2 )}・Yi
/{Xi2+Yi2+(Zi−2Zs)2}3/2 …(25)
EDZ={(σ1 −σ2 )Iσi/(σ1 +σ2 )}・(Zi−2Zs)
/{Xi2+Yi2+(Zi−2Zs)2}3/2 …(26)
【0087】
ここで、
σ1 :海水の電気伝導度
σ2 :海底の電気伝導度
σ3 :空気の電気伝導度(=0)
Zs:水深
である。
【0088】
そして、電界(Ex ,Ey ,Ez )は、最終的には、例えば次式(27)〜(29)のように各点電流源(点電流源)の和で表されることになる。ここで、環境条件等によってはすべての鏡像点電流源を考慮しない方が現実的となることもあるし、また、すべての項を加算すると計算量も多くなるので、(27)〜(29)式中、1又は複数の項を省略してもよい。
Ex =EAx+EBx+ECx+EDx …(27)
Ey =EAy+EBy+ECy+EDy …(28)
Ez =EAz+EBz+ECz+EDz …(29)
【0089】
以上により算出した(Ex ,Ey ,Ez )に基づいて、第1の実施の形態と同様に、最小自乗法によりパラメータの値を計算し、決定する。ここで、本実施の形態においては、(8)式に示したパラメータの他に、例えば、σ2 、σ1 −σ2 、σ1 +σ2 等、海底の電気伝導度σ2 を含んだパラメータが追加される。ここでは、特にσ* =(σ1 −σ2 )/(σ1 +σ2 )としたσ* (導電率比)をパラメータとして追加することにする。したがって、位置推定等を行うためのパラメータは次式(30)のように設定される。
ae =(Iσi,di ,X0 ,Y0 ,Zi ,V,α,σ* ) …(30)
【0090】
ここで、(27)〜(29)式において相似となるパラメータの組み合わせが存在するかどうかを検証する。電界信号は、位置、速度等の複数のパラメータの値が組み合わさることでその信号波形が形成される。相似とは、同一の電界信号波形であっても、値の組合せが無数にある場合をいう。このとき、その信号から推定する位置、速度等のパラメータが一意に決まらず、不定となる。相似となるパラメータは、次式(31)において、k=1、k’=1の組み合わせ以外で(27)〜(29)式を満たすk、k’により決まるパラメータをいう。相似となるパラメータが存在すると、k、k’は任意の値を採ることができるため、その組み合わせは無限に存在することになり、移動体速度、初期位置等のパラメータの値が1組に決定できないことになる。
ae =(k’Iσi,kdi ,kX0 ,kY0 ,kZi ,kV,α,σ* )…(31)
【0091】
そして、(30)式のパラメータに基づく(27)〜(29)式と、(31)式のパラメータに基づく(27)〜(29)式との恒等式を考える。この恒等式を満たすk、k’の値はたかだか有限個である。そして、これらの値の中で、数学的には存在したとしても、少なくとも現実的な移動体(特に船舶)の範囲内で採り得る値は、k=1、k’=1の組み合わせしか存在しない。(これは(27)〜(29)式における第2〜第4項のうち、1又は2の項を省略しても同じである。)したがって、(27)〜(29)式からは移動体の速度、初期位置等のパラメータを1組に決定することができる。これにより、水上を航行する船舶、海中の移動体の速度、位置等も推定することができる。
【0092】
ここで、決定したパラメータの値において、σ* >1となることがある。この場合には、決定したパラメータの値に対して、以下に示す補正を行った値を、あらためてパラメータの値として決定する。σ* >1の場合、移動体の移動方向は反転することになる(点電流源の方向関係もその方向に伴って反転する)。
補正後のIσi:−Iσi(補正前)×σ*(補正前)
補正後のα :α(補正前)−180゜
補正後のσ* :1/σ*(補正前)
【0093】
以上のように実施の形態4によれば、海水面及び海底面での境界条件を考慮し、仮想的に鏡像点電流源(電極)を設け、船舶上の点電流源からの電界と鏡像点電流源(電極)による電界との和を船舶により生ずる電界として式を設定し、位置等推定検出部9bが、最小自乗法を適用して電界信号に基づく値を満足するようにパラメータの値を一意に決定し、決定した値に基づいて海面、海中を移動する移動体の現在及び/又は将来の位置を推定検出するようにしたので、より現実に近い結果を得るようにし、精確に位置等の推定、検出を行うことができる。また、海面を航行する船舶について、船舶の大きさ(排水量)によって、プロペラ、舵等、点電流源の深さも変わる(基本的に重いほど海面から深い位置となる)ことから、例えば、決定した点電流源の高さ(電界検知器1とのZ軸方向の距離)のパラメータに基づいて、船舶の大きさ(排水量)を推定することもできるようになる。
【0094】
実施の形態5.
上述した実施の形態1では、複数の点電流源(電極)が船体長方向に一列に並べられたものとして説明を行った。ここでは、例えば複数の点電流源が左舷及び右舷(船幅方向)の2列に配置された船舶を考慮した場合について考える。この場合、船体長方向のパラメータであるdi だけでなく、さらに次のパラメータdwiを追加する。これにより、さらに理論式を現実のものに近づけることができ、精確に位置等の推定、検出を行うことができる。
dwi:各点電流源の船幅方向の間隔
【0095】
実施の形態6.
上述の実施の形態4においては、点電流源に基づく理論に対して鏡像理論を適用し、理論式を設定するようにしたが、これに限定するものではない。例えば、ダイポールモーメントに基づく理論においても、鏡像理論を適用して実施の形態4で説明したように、各媒体の誘電率から鏡像点電流源による電界の式の和を用いて理論式を設定することができる。また、信号として磁気を検知して位置等の推定検出を行う場合についても、最小自乗法に用いるための理論式に、透磁率が異なる媒体間において鏡像理論を適用することができる。
【図面の簡単な説明】
【0096】
【図1】本発明の第1の実施の形態に係る移動体位置等検出装置の構成ブロック図である。
【図2】移動体の位置と電界信号との関係を表す図である。
【図3】移動体と点電流源との関係を表す図である。
【図4】船体における点電流源に対する鏡像点電流源(電極)を表す図である。
【符号の説明】
【0097】
1 電界検知器、2 磁気検知器、3 潮流計、4a、4b、4c A/D変換器、5 傾斜計、6 誘導起電力推定器、7 電界信号処理器、8 データ収集器、8A データ処理部、8B データ記録部、9 位置等推定検出器、9a 電界信号データ補正部、9b 位置等推定検出部。
【技術分野】
【0001】
本発明は、ある場において所望する電界の強度だけを精度よく検出するための方法及び装置に関するものである。特に海中における電界検出に関するものである。さらに検出した電界に基づいて移動体の位置を検出する移動体位置検出方法等に関するものである。
【背景技術】
【0002】
電界の時間的変化を検出することにより、物体、事象等の様々な検知が従来から行われている。例えば、船舶が発する電界による信号の直交3軸成分に基づいて、移動目標の位置(偏奇量)を検出する方法もある(例えば特許文献1参照)。
【特許文献1】特開2000−304533号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
上記の方法では、海面に自然に発生している電界雑音(ノイズ)は存在しないものと仮定している。そして、この仮定に基づいて、移動体が海水中を移動する場合、検出する電界信号の時系列データは理論式で表すことができるものとし、最小自乗法等を用いて位置等を推定し、検出を行っている。
【0004】
しかしながら、地磁気を横切るように導電性媒質である海水が移動する(潮が流れる)と電磁誘導により誘導起電力が生じる。そして、電界センサが地磁気下の海水中にあると、その周辺に発生した誘導起電力を要因とする浮遊ノイズが、電界センサが検出する電界信号(の時系列データ)に重畳する。その結果、所望する物体、事象等により生じる電界の検出精度が低くなる。潮流速が速くなるほどノイズが多くなり、例えば潮流速が数m/sの環境下でも、位置等の推定検出において精度の低下を招いていた。また、浮遊ノイズのレベルによっては、所望する物体、事象等により生じる電界がノイズに埋もれてしまい、位置等の推定検出を行うことができない可能性もあった。このように、所望する電界以外にも、電界が生ずる要因があり、電界の検出精度を上げためには、常にノイズに対する対策を行っておく必要がある。これは、位置等の推定検出精度を上げるためにも必要である。
【0005】
そこで、本発明は上記のような問題点を解決し、特に海中において、自然に発生する(浮遊)ノイズの影響に対処し、所望の物体、事象等に基づいて生じる電界を高精度に検出できる方法等を提供することを目的とする。また、検出した電界に基づいて、高精度に移動体の位置等を推定、検出することができる方法等を提供することを目的とする。
【課題を解決するための手段】
【0006】
本発明に係る電界検出方法は、海中に設けられた手段により、少なくとも電界及び海水の速度を計測し、海水の速度並びに計測された又は定められた地磁気による磁束密度のデータに基づいて海水が地磁気を横切ることによって生じる誘導起電力に基づく値を算出する工程と、電界から誘導起電力に基づく値の成分を除去する工程とを有するものである。
【0007】
また、本発明に係る位置等推定検出方法は、海中に設けられた手段により、少なくとも電界及び海水の速度を時系列に計測していき、海水の速度並びに計測された又は定められた地磁気による磁束密度のデータに基づいて、海水が地磁気を横切ることによって生じる誘導起電力の値を算出し、電界から誘導起電力の成分を除去して、海面又は海中を航行する移動体により生じる電界のデータを算出する工程と、推定検出手段が、残差を用いた最小自乗法を適用して、移動体により生じる電界のデータの値が点電流源に係る理論式を満足するようなパラメータの値を決定し、決定したパラメータの値に基づいて少なくとも移動体の現在及び/又は将来の位置を推定検出する工程とを有するものである。
【0008】
また、本発明に係る位置等推定検出方法は、海中に設けられた手段により、少なくとも電界及び海水の速度を時系列に計測していき、海水の速度並びに計測された又は定められた地磁気による磁束密度のデータに基づいて、海水が地磁気を横切ることによって生じる誘導起電力の値を算出し、電界から誘導起電力の成分を除去して、海面又は海中を航行する移動体により生じる電界のデータを算出する工程と、推定検出手段が、移動体により生じる電界成分と海水面及び海底面を境界として仮想的に設定した鏡像電極に基づく電界成分との和で表す式を満足するようなパラメータの値を決定し、決定したパラメータの値に基づいて少なくとも移動体の現在及び/又は将来の位置を推定検出する工程とを有するものである。
【0009】
また、本発明に係る位置等推定検出方法では、海水及び海底の電気伝導度を含むパラメータについて、さらに値を決定する。
【0010】
また、本発明に係る位置等推定検出方法で用いる最小自乗法にはガウス・ニュートン法を適用する。
【0011】
また、本発明に係る位置等推定検出方法は、移動体の速度及び電界の信号の受信位置との最接近位置をさらに推定検出する。
【0012】
また、本発明に係る位置等推定検出方法は、電界の強度又はパラメータの値に基づいて移動体又はその種別を判断する。
【0013】
また、本発明に係る電界検出装置は、電界を3軸方向の各成分で検知する電界検知手段と、海水の速度を3軸方向の各成分で計測する潮流計測手段と、海水の速度並びに計測された又は定められた地磁気による磁束密度の各成分のデータに基づいて、発生する誘導起電力に基づく演算を行って電界浮遊ノイズデータを生成する誘導起電力推定手段と、電界浮遊ノイズデータにより、電界に基づくデータを補正する電界補正手段とを備えたものである。
【0014】
また、本発明に係る電界検出装置は、 磁界を3軸方向の各成分で検知する磁界検知手段をさらに備え、誘導起電力推定手段は、磁界に基づく地磁気による磁束密度の各成分のデータにより演算を行うものである。
【0015】
また、本発明に係る位置等推定検出装置は、電界を3軸方向の各成分で検知する電界検知手段と、海水の速度を3軸方向の各成分で計測する潮流計測手段と、海水の速度並びに計測された又は定められた地磁気による磁束密度の各成分のデータに基づいて、発生する誘導起電力を電界浮遊ノイズデータとして演算する誘導起電力推定手段と、電界検知手段が検知した電界のデータ及び電界浮遊ノイズデータを時系列に記録するデータ記録手段と、電界浮遊ノイズデータにより電界に基づくデータを補正する電界補正手段と、電界補正手段が補正した電界のデータの値が、点電流源に係る電界の理論式を満足するように、あらかじめ定めた収束条件を満たすまで、残差を用いた最小自乗法による反復計算を行ってパラメータの値を決定し、決定したパラメータの値に基づいて少なくとも移動体の現在及び/又は将来の位置を推定検出する検出手段とを備えたものである。
【0016】
また、本発明に係る位置等推定検出装置は、電界を3軸方向の各成分で検知する電界検知手段と、海水の速度を3軸方向の各成分で計測する潮流計測手段と、海水の速度並びに計測された又は定められた地磁気による磁束密度の各成分のデータに基づいて、発生する誘導起電力を電界浮遊ノイズデータとして演算する誘導起電力推定手段と、電界検知手段が検知した電界のデータ及び電界浮遊ノイズデータを時系列に記録するデータ記録手段と、電界浮遊ノイズデータにより電界に基づくデータを補正する電界補正手段と、電界補正手段が補正した電界のデータの値が、移動体である海面又は海中を航行する船舶から直接発せられる電界成分と海水面及び海底面を境界として仮想的に設定した鏡像電極に基づく電界成分との和で表す式を満足するようなパラメータの値を、残差を用いた最小自乗法を適用して決定し、決定したパラメータの値に基づいて少なくとも移動体の現在及び/又は将来の位置を推定検出する検出手段とを備えたものである。
【0017】
また、本発明に係る電界検出装置は、 磁界を3軸方向の各成分で検知する磁界検知手段をさらに備え、誘導起電力推定手段は、磁界に基づく地磁気による磁束密度の各成分のデータにより演算を行うものである。
【0018】
また、本発明に係る位置等推定検出装置の検出手段は、パラメータの値に基づいて移動体の速度及び検知手段との最接近位置をさらに推定検出する。
【0019】
また、本発明に係る位置等推定検出装置の検出手段は、物理量の大きさ又はパラメータの値に基づいて、移動体又はその種別を判断する。
【0020】
また、本発明に係る電界検出方法のプログラムは、(計測された又は定められた地磁気による磁束密度並びに)海中に設けられた手段から得られた少なくとも海水の速度のデータに基づいて、海水が地磁気を横切ることによって生じる誘導起電力に基づく値をデータとして算出する工程と、海中の電界のデータから前記誘導起電力に基づく値の成分を除去して補正した前記電界のデータを算出する工程とをコンピュータに行わせるものである。
【0021】
また、本発明に係る位置等推定検出方法のプログラムは、(計測された又は定められた地磁気による磁束密度並びに)海中に設けられた手段から得られた少なくとも海水の速度のデータに基づいて、海水が地磁気を横切ることによって生じる誘導起電力の値を算出し、海中の電界のデータから誘導起電力の成分を除去して、海面又は海中を航行する移動体により生じる電界をデータとして時系列に算出する工程と、残差を用いた最小自乗法を適用して、移動体により生じる電界のデータの値が点電流源に係る理論式を満足するようなパラメータの値を決定し、決定したパラメータの値に基づいて少なくとも移動体の現在及び/又は将来の位置を推定検出する工程とをコンピュータに行わせるものである。
【0022】
また、本発明に係る位置等推定検出方法のプログラムは、(計測された又は定められた地磁気による磁束密度並びに)海中に設けられた手段から得られた少なくとも海水の速度のデータに基づいて、海水が地磁気を横切ることによって生じる誘導起電力の値を算出し、海中の電界のデータから誘導起電力の成分を除去して、海面又は海中を航行する移動体により生じる電界をデータとして時系列に算出する工程と、移動体により生じる電界成分と海水面及び海底面を境界として仮想的に設定した鏡像電極に基づく電界成分との和で表す式を満足するようなパラメータの値を決定する工程と、決定したパラメータの値に基づいて、少なくとも移動体の現在及び/又は将来の位置を推定検出する工程とをコンピュータに行わせるものである。
【0023】
また、本発明に係る位置等推定検出方法のプログラムは、海水及び海底の電気伝導度を含むパラメータに対する値の決定をさらにコンピュータに行わせる。
【0024】
また、本発明に係る位置等推定検出方法のプログラムは、パラメータの値に基づいて移動体の速度及び電界の信号の受信位置との最接近位置の推定検出をさらにコンピュータに行わせる。
【0025】
また、本発明に係る位置等推定検出方法のプログラムは、電界の強度又はパラメータの値に基づいて移動体又はその種別の判断をさらにコンピュータに行わせる。
【発明の効果】
【0026】
本発明によれば、海中での電界検知において、その電界においてノイズとなる海水が地磁気を横切ることによって生じる誘導起電力に基づく値を算出し、除去することで、より精度の高い電界検出を行うことができる。これにより、例えば電界検出による移動体の位置推定、地震予知等の精度を高めることができる。
【0027】
また、本発明によれば、海水が地磁気を横切ることによって生じる誘導起電力に基づく成分を除去した上で、移動体により生じる電界を時系列にした電界データから、推定検出手段が、点電流源に係る理論式を満足するようなパラメータの値を決定し、決定したパラメータの値に基づいて少なくとも移動体の現在及び/又は将来の位置を推定検出するようにしたので、精確に位置等の推定、検出を行うことができる。
【0028】
また、本発明によれば、海水が地磁気を横切ることによって生じる誘導起電力に基づく成分を除去した上で、移動体により生じる電界を時系列にした電界データから、推定検出手段が、移動体から直接発せられる電界成分と海水面及び海底面を境界として仮想的に設定した鏡像電極に基づく電界成分との和で表す式を満足するようなパラメータの値を決定し、決定したパラメータの値に基づいて少なくとも移動体の現在及び/又は将来の位置を推定検出するようにしたので、より現実に近い結果を得るようにし、精確に位置等の推定、検出を行うことができる。
【0029】
また、本発明によれば、海水面及び海底面を境界として鏡像電極を設定する際に、海底の電気伝導度に関するパラメータを加え、その値を決定するようにしたので、決定した値に基づいて、移動体の方向の修正も確実に行うこともできる。
【0030】
また、本発明によれば最小自乗法にガウス・ニュートン法を適用するようにしたので、計算時間の短縮を図りつつ、収束安定性のよい最小自乗法を適用し、位置等の推定検出をすばやく高精度に行うことができる。
【0031】
また、本発明によれば、決定したパラメータの値に基づいて、移動体の速度及び2以上の物理量の信号の受信位置との最接近位置(最小距離)をさらに推定検出することができる。
【0032】
また、本発明によれば、物理量の大きさ又はパラメータの値とそれに対応した移動体又はその種別の特徴とを例えばデータベース化しておくことで、得られた信号、パラメータの値に基づいて移動体又はその種別も判断することができる。
【0033】
本発明によれば、海中での電界検知において、誘導起電力推定手段が、その電界においてノイズとなる海水が地磁気を横切ることによって生じる誘導起電力に基づく値を算出して電界浮遊ノイズデータを生成し、電界補正手段が、電界浮遊ノイズデータにより電界に基づくデータを補正し、ノイズの影響を除去することで、より精度の高い電界検出を行うことができる。これにより、例えば電界検出による移動体の位置推定、地震予知等の精度を高めることができる。
【0034】
また、本発明によれば、磁界検知手段が検知した磁界から得られた地磁気による磁束密度の各成分のデータに基づいて誘導起電力推定手段が電界浮遊ノイズデータを生成するようにしたので、より実測に基づく演算により高精度の演算が期待できる。
【0035】
また、本発明によれば、誘導起電力推定手段が、海水が地磁気を横切ることによって生じる誘導起電力に基づく値を算出して電界浮遊ノイズデータを生成し、電界補正手段が、電界浮遊ノイズデータにより補正した電界に基づくデータから、推定検出手段が、点電流源に係る理論式を満足するようなパラメータの値を決定し、決定したパラメータの値に基づいて少なくとも移動体の現在及び/又は将来の位置を推定検出するようにしたので、精確に位置等の推定、検出を行うことができる。特に検知手段と移動体との距離が近い場合において、位置等の推定、検出を行うには有効である。
【0036】
また、本発明によれば、誘導起電力推定手段が、海水が地磁気を横切ることによって生じる誘導起電力に基づく値を算出して電界浮遊ノイズデータを生成し、電界補正手段が、電界浮遊ノイズデータにより補正した電界に基づくデータから、推定検出手段が、移動体から直接発せられる電界成分と海水面及び海底面を境界として仮想的に設定した鏡像電極に基づく電界成分との和で表す式を満足するようなパラメータの値を決定し、決定したパラメータの値に基づいて少なくとも移動体の現在及び/又は将来の位置を推定検出するようにしたので、より現実に近い結果を得るようにし、精確に位置等の推定、検出を行うことができる。
【0037】
また、本発明によれば、磁界検知手段が検知した磁界から得られた地磁気による磁束密度の各成分のデータに基づいて誘導起電力推定手段が電界浮遊ノイズデータを生成するようにしたので、より実測に基づく演算により高精度の演算が期待できる。
【0038】
また、本発明によれば、検出手段が、決定したパラメータの値に基づいて、移動体の速度及び電界信号の受信位置との最接近位置(最小距離)をさらに推定検出することで、位置以外の情報をさらに得ることができる。
【0039】
また、本発明によれば、検出手段に物理量の大きさ又はパラメータの値とそれに対応した移動体又はその種別の特徴とを例えばデータベース化しておけば、得られた信号、パラメータの値に基づいて移動体又はその種別というさらに詳細な情報を得ることができる。
【0040】
本発明によれば、海中での電界検知において、その電界においてノイズとなる海水が地磁気を横切ることによって生じる誘導起電力に基づく値を算出し、除去するプログラムをコンピュータに実行させるようにしたので、より精度の高い電界検出を行うことができる。これにより、例えば電界検出による移動体の位置推定、地震予知等の精度を高めることができる。
【0041】
また、本発明によれば、海水が地磁気を横切ることによって生じる誘導起電力に基づく成分を除去した上で、移動体により生じる電界を時系列にした電界データから、点電流源に係る理論式を満足するようなパラメータの値を決定し、決定したパラメータの値に基づいて少なくとも移動体の現在及び/又は将来の位置を推定検出させるようなプログラムをコンピュータに実行させるようにしたので、精確に位置等の推定、検出を行うことができる。特に検知手段と移動体との距離が近い場合において、位置等の推定、検出を行うには有効である。
【0042】
また、本発明によれば、海水が地磁気を横切ることによって生じる誘導起電力に基づく成分を除去した上で、移動体により生じる電界を時系列にした電界データから、移動体から直接発せられる電界成分と海水面及び海底面を境界として仮想的に設定した鏡像電極に基づく電界成分との和で表す式を満足するようなパラメータの値を決定し、決定したパラメータの値に基づいて少なくとも移動体の現在及び/又は将来の位置を推定検出させるようなプログラムをコンピュータに実行させるようにしたので、より現実に近い結果を得るようにし、精確に位置等の推定、検出を行うことができる。
【0043】
また、本発明によれば、海水面及び海底面を境界として鏡像電極を設定する際に、海底の電気伝導度に関するパラメータを加え、その値をコンピュータに決定させるようにしたので、決定した値に基づいて、移動体の方向の修正も確実に行うこともできる。
【0044】
また、本発明によれば、パラメータの値に基づいて移動体の速度及び物理量の受信位置との最接近位置の推定検出をさらにコンピュータに行わせるようにしたので、位置以外の情報を得ることができる。
【0045】
また、本発明によれば、移動体位置等推定検出方法のプログラムは、物理量の大きさ又はパラメータの値に基づいて移動体又はその種別の判断をさらにコンピュータに行わせるようにしたので、位置以外のさらに詳細な情報を得ることができる。
【発明を実施するための最良の形態】
【0046】
実施の形態1.
図1は本発明の第1の実施の形態に係る電界検出装置を一部に有する移動体位置等検出装置の構成ブロック図である。ここで、本実施の形態では、海面又は海中を移動する航走体を移動体と想定して説明する。そのため、移動体位置等検出装置は海中(海底も含む)に設けられている。そして、電気を伝導する媒質は海水であるものとする(したがって、電界検知器1は海中の電界強度を信号として検知する)。また、移動体は等速直線運動を行っているものとする。移動体位置等検出装置(特に電界検知器1)が設けられている場所については、特に限定するものではないが、海水の塩分濃度が安定している場所だと電界等の検知精度をさらに高くし、移動体の位置等の推定、検出の精度も高めることができる。
【0047】
図1において、電界検知器(電界センサ)1は電界強度を信号として検知(受信)し、電気信号(以下、電界信号という)に変換する(場合によっては、検知した他の電気的物理量に基づく信号に基づいて電界強度を算出した電気信号を電界信号とすることもある。また、光信号に変換した後に電気信号に変換する場合もある)。ここで、電界検知器1とは、各々直交する3つの検知手段を有する検知器又は3軸センサを表す検知器であり、直交(相対)座標系の3軸方向での検知ができるものとする。
【0048】
また、磁気検知器(磁気センサ)2も、磁界(磁束密度)を信号として検知(受信)し、電気信号(以下、磁界信号という)に変換する(場合によっては、検知した他の磁気的物理量に基づく信号に基づいて磁束密度を算出した電気信号を磁界信号とすることもある)。磁気検知器2も、電界検知器1と同様に直交座標系の3軸方向での検知ができるものとする。本実施の形態では、主に電界検知器1に発生する誘導起電力を算出するための演算に用いる。
【0049】
潮流計3は、海水の移動速度(海潮流の速度)を計測し、電気信号(以下、潮流信号という)に変換する。潮流計3についても、3軸方向における速度のそれぞれの成分を潮流信号として送信できるものとする。A/D変換器4a、4b及び4cは、例えばサンプリング等の処理を施して、それぞれ電界信号、磁界信号及び潮流信号をデジタルデータの信号に変換する(以下、各信号に基づくデータを電界信号データ、磁界信号データ及び潮流データという)。ここで、電界検知器1及び磁気検知器2の距離は、装置と移動体との間の距離に比べ、無視できるほど小さいので、それぞれの座標系の原点が同じである(同位置にある)ものとする。また、電界検知器1、磁気検知器2及び潮流計3については、3軸の方向(座標系)が同じであるとする。
【0050】
傾斜計5は、例えば海面に対して鉛直な方向をZ軸としたときに、移動体位置等検出装置(特に電界検知器1、磁気検知器2、潮流計3)の傾斜の程度を計測し、計測に基づくデータを含む信号(以下、このデータを傾斜データという)を、誘導起電力推定器6及び電界信号処理器7に送信する。そして、誘導起電力推定器6は、傾斜データに基づいて潮流データ及び磁界信号データを補正し、補正したデータにより、海水の流れにより生じる誘導起電力の値を推定演算し、電界浮遊ノイズ推定データとしてデータ収集器8に記録させる。また、電界信号処理器7は、傾斜データに基づいて電界信号データを補正し、その電界信号データをデータ収集器8に記憶させる(ここで、以後の説明では、電界信号データ、磁界信号データ及び潮流データは、傾斜による影響を受けていない状態のデータであるものとする)。
【0051】
データ収集器8は、データ処理部8Aとデータ記録部8Bで構成される。データ処理部8Aは、いわゆるデータベース管理システム(DBMS)である。電界信号データ及び電界浮遊ノイズ推定データと時刻データとを関連づける処理を行う。また、データ記録部8Bは記録装置(手段)で構成されており、電界信号データ、電界浮遊ノイズ推定データ及び時刻データを少なくとも一定時間分又は一定個数分記録する。このデータ収集器8はいわゆるデータベースの役割を果たす。
【0052】
位置等推定検出器9は、電界信号データ補正部9a及び位置等推定検出部9bで構成される。電界信号データ補正部9aは、電界信号データ及び電界浮遊ノイズ推定データに基づいて演算を行い、電界信号補正データを生成する。また、位置等推定検出部9bは、電界信号補正データに基づいて移動体の位置等を推定演算し、検出を行う。
【0053】
ここで、誘導起電力推定器6、電界信号処理器7、位置等推定検出器9は例えばCPU(Central Prosessing Unit )を中心としたコンピュータ等のような制御演算処理手段で構成されている。そして、位置等の推定演算処理手順をあらかじめプログラム化したものを制御演算処理手段が実行し、そのプログラムに基づく処理を行うことで、後述する各式に基づく加減乗除等の演算を行い、さらに演算結果に基づいて収束等を判断することにより位置等の推定を実現する。ここではそれぞれ別の機器(手段)として構成しているが、例えば、各器が行うプログラムに基づく処理を1つの制御演算処理装置により行うようにしてもよい。
【0054】
なお、本実施の形態の装置において必須の手段ではないが、接近検知器、移動検知器を設け、移動体の接近、移動を判断し、例えばデータ収集器8において、電界信号の記録開始又は終了等を制御することもできる。また、深度計を電界検知器1の近辺に備えることで、移動体が水面上を走行する船舶の場合は、例えばZ軸方向の距離である深度(高さ)を計測し、既知の値として用いることができる。そのため、後述するパラメータ(未知の変数)の数を少なくすることができる。
【0055】
本実施の形態では、例えば移動体が発する電流等により生じる電界の強度に基づいて移動体の位置等の推定を行うが、海中においては自然現象により電界を発生させる要因が存在する。例えば、導電体である海水が例えば潮流として移動し、地磁気(地球による磁界)を横切ることで誘導起電力が発生する。この誘導起電力が移動体により生じる電界に対するノイズとなり、海中(又は海底)の電界検知器1による電界信号に加わるため、この電界信号に基づく電界信号データによる位置等の推定は、精度が低くなる。
【0056】
そこで、本実施の形態では、装置が設けられた位置における海水(導電体)の速度(潮流計3により得られる潮流データ)と装置が設けられた位置における地磁気による磁束密度(磁気検知器2により得られる磁界信号データ)とに基づいて誘導起電力推定器6が推定演算を行い、誘導起電力(これを誘導起電力eとする)を時系列に算出する。この誘導起電力eの成分が電界検知器1に基づく電界信号に含まれる電界浮遊ノイズであるとして、誘導起電力eに基づく電界浮遊ノイズデータ(この値をE’とする)を生成し、データ収集器8に記録させる。
【0057】
誘導起電力推定器6が推定演算する誘導起電力eは、地磁気による磁束密度B及び潮流速(海水の速度)vに基づいて次式(1)で表される。ここで、磁束密度B及び潮流速vはベクトルであり、誘導起電力eは磁束密度Bと潮流速vとの外積となる。また誘導起電力eもベクトルである。ここで、磁束密度B、潮流速v、誘導起電力eの方向は互いに直交する(フレミングの右手の法則)。
【0058】
【数1】
【0059】
一方、電界信号処理器7により電界信号データ(この値をE1とする)もデータ収集器8に記録される。そして、電界信号データ補正部9aが、E1及びE’に基づいて、各時刻における補正した電界(移動体により生じる電界)を次式(2)に基づいて算出し、電界信号補正データ(この値をEとする)とする。ここで、E、E1及びE’は3次元のベクトルである。
E=E1−E’ …(2)
【0060】
図2は移動体の位置と移動体により生じる電界信号との関係を表す図である。海水は電解質溶液であるために海水中に異種金属が存在すると、電位差を生じる。この場合、イオン化傾向が大きい金属からイオン化傾向が小さい金属に電流が流れ、陽極表面が腐食する。船舶においては、例えば船体外板が陽極(鉄鋼)、プロペラが陰極(銅合金等)となり、プロペラ主軸を介して船体外板へ電流が戻ってくることにより閉回路が構成される。この電流が腐食電流である。また、このような腐食電流による金属の腐食を防止するため、防食電流を流すこともある。そのため、例えば海水に電流を流すための保護亜鉛や白金等の陽極電極が船体に設けられる。また、船尾部分に設けられているプロペラ、舵等は、海水を介して電流が流れ込む(電流を吸い込む)ための陰極電極として機能する。そして、これらは海水を流れる電流に対して、電流源(以下、点電流源という)となる。
【0061】
電界検知器1と移動体との距離が遠い又は陽極電極と陰極電極との間隔が短ければ、点電流源を双極子(ダイポール)とみなしてダイポールモーメントによる理論式を用いることができる。そうでない場合、現実の条件と式とが乖離してしまい、実測値に基づいて決定したパラメータの値が真の値と大きく外れ、精確な移動体の位置等の検出ができなくなる(実際に距離が近づくほど、高精度な位置等の推定検出が要求される場合もある)。本実施の形態では、単極子である点電流源に合わせた計算を行うことで、現実に沿った式に基づいて精確な移動体の位置等の検出を行う。位置等の検出には最小自乗法(特に非線形最小自乗法である。以下、単に最小自乗法を用いる。具体的には、理論により得られた値と実測した信号から得られた値の残差の自乗和が最小となるように、反復計算を行い、所定の収束条件を充たしたものと判断したときのパラメータの値に基づいて、位置等の算出を行う。
【0062】
図3は移動体と点電流源との関係を表す図である。電界検知器1の直上近傍を移動体が等速直線運動で移動する場合、移動体に設けられた点電流源による電界信号の3軸成分(EX ,EY ,EZ )は、次式(3)〜(5)で表される。
【0063】
EX =ΣIσi・Xi/(Xi2+Yi2+Zi2)3/2 …(3)
Ey =ΣIσi・Yi/(Xi2+Yi2+Zi2)3/2 …(4)
Ez =ΣIσi・Zi/(Xi2+Yi2+Zi2)3/2 …(5)
【0064】
ここで、基準位置から第1の点電流源の位置X1 ,Y1 を、
X1 =X0 +Vcosα・t …(6)
Y1 =Y0 +Vsinα・t …(7)
とし、
Xi =X1 +di ・cosα・t …(8)
Yi =Y1 +di ・sinα・t …(9)
とする。
【0065】
ただし、
X0 ,Y0 :基準位置
i :点電流源の個数(1,2,…)
Iσi:Ii /4πσ1
Ii :各点電流源の電流量
σ1 :海水の電気伝導度(導電率)
t :時間
V :移動体速度
di :第1の点電流源と各点電流源との船体長方向の間隔(1,2,…,i−1)
Zi :電界検知器1からの移動体の高さ(水上を走行する船舶ではほぼ水深と同じ)
α :電界検知器1のX軸方向と移動体の移動方向とのなす角
を表す。ここで、点電流源Iを点電荷Qとして見た場合、点電流源Iと点電荷QとはI=σ・Q/εの関係となる。εは誘電率である。また、ΣIi =0、すなわち各点電流源の総和は0となる。
【0066】
以上のようにして得られた電界の理論式において、実測した電界信号に基づく値との整合を図るために決定するパラメータ(未知)は、次式(10)のように設定される。ここで、前述したように、水深計により海面までの距離が既知であり、これにより移動体までのZ軸方向の距離が既知の場合はZi をパラメータに含めなくてもよい。
ae =(Iσi,di ,X0 ,Y0 ,Zi ,V,α) …(10)
【0067】
位置等推定検出部9bは、実際の検知により得られた電界に基づく値(電界信号補正データの値E)が理論式を満足させるために最小自乗法により各パラメータを調整してパラメータの値を決定し、決定した値に基づいて移動体の位置を推定、検出する。最小自乗法を適用する際には、パラメータに対して初期値を与え、計算を行う。例えば、基準位置X0 ,Y0 については、X0 =0、Y0 =0(電界検知器1の直上)を初期値とする。ここで、X0 =0、Y0 =0は推定値ではあるが、実際のX0 ,Y0 に概ね近い値であるので、良好な算出結果を得ることができる。最小自乗法には様々な方法があるが、本実施の形態ではガウス・ニュートン法を適用する。ここでは計算時間と収束安定性とのバランス、関数との関係等を考慮した上で、ガウス・ニュートン法を基本としたレーベンベルグ・マルカート(Levenberg-Marquardt )法を用いて行うことを想定しているが、ダンピング法、パウエル法等、ガウス・ニュートン法に基づく他の解法を用いてもよい。また、ガウス・ニュートン法でなくても、最急降下法等、他の非線形最小自乗法の解法を用いてもよい。電界信号(電界信号のデータ)に適用すると、次式(11)〜(13)が成立する。
【0068】
PetPe ・Δae =−Petre …(11)
PetPe =Pext Pex+Peyt Pey+Pezt Pez …(12)
Petre =Pext rex+Peyt rey+Pezt rez …(13)
【0069】
ただし、
Pex:x軸方向の電界信号の各パラメータの一階微分からなる行列
Pey:y軸方向の電界信号の各パラメータの一階微分からなる行列
Pez:z軸方向の電界信号の各パラメータの一階微分からなる行列
re :残差の自乗和
Δae :パラメータの修正値
である。
【0070】
そして、位置等推定検出部9bは、(13)式における残差の自乗和が所定の収束条件を満たすまで(例えば残差の自乗和が所定の値以下になる又は自乗和の変化率の減少が所定の値以下になるまで)反復計算を行う。ここで反復計算に当たり、移動体が最接近すると判断するまでの間は、実際の信号によって得られた電界信号補正データに基づいて算出された値を、次の反復計算を行う際のX0 ,Y0 の初期値として用いる。そして、収束条件を満たし、決定されたパラメータ(X0 ,Y0 )に基づいて、CPA(Closest Point of Approach :最接近位置(t=0における位置))を推定、検出する。さらに決定したパラメータV、α、di の値を(6)、(7)式や(8)、(9)式に代入することで、移動体の現在位置及び各点電流源の位置(船尾等)を推定、検出できる。また、移動体は等速直線運動をしているものと扱っているため、推定検出した現在位置、速度に基づいて、将来の位置についても予測(推定、検出)することができる。
【0071】
また、例えば移動体から発生される電気的物理量、パラメータの値等のデータと移動体又はその種別のデータとを関連づけておけば、電界信号補正データ、決定したパラメータの値から、移動体又はその種類を特定することもできる。
【0072】
以上のように、第1の実施の形態によれば、導体である海水が地磁気を横切ることで発生する誘導起電力eを、磁気検知器2からの磁界信号及び潮流計3からの潮流信号に基づいて、誘導起電力推定器6が推定演算し、この誘導起電力eの成分が、電界検知器1からの電界信号に含まれる電界浮遊ノイズであるとして、電界信号データ補正部9aが、電界信号から電界浮遊ノイズの成分を除去した電界信号補正データEを生成するようにしたので、自然現象により発生するノイズの成分を電界信号から除去した上で、補正したデータの値に基づいて位置推定等の演算を行うことができ、より精度の高い位置等の推定を行うことができる。
【0073】
そして、電界信号補正データに基づいて、位置等推定検出部9bが、より現実に近い結果を得るように、船舶の点電流源から流れる電流により生じる電界の理論式を用いて、最小自乗法を適用して電界信号に基づく値を満足するようにパラメータの値を決定し、決定した値に基づいて移動体の現在及び/又は将来の位置を推定検出するようにしたので、精確に位置等の推定、検出を行うことができる。特に電界検知器1と移動体との距離が近い場合に、位置等の推定、検出を行うには有効である。
【0074】
また、移動体の現在及び/又は将来の位置を推定検出するだけでなく、決定したパラメータの値に基づいて最接近位置、速度等も推定検出するようにすれば、移動体に関する詳細なデータを推定し、得ることができる。そして、例えば移動体による電界強度、パラメータの値等のデータと移動体又はその種別のデータとを関連づけておけば、得られた電界信号のデータ、決定したパラメータの値から、移動体又はその種類を特定することもできる。さらに、プロペラ等が点電流源となるため、船尾の位置を特定することが可能である。そして、例えば磁界等の信号に基づいて、船首の位置を特定することができれば船体長を推定することができるし、移動体又はその種類を特定することもできる。
【0075】
さらに、最小自乗法の解法としてガウス・ニュートン法、特にレーベンベルグ・マルカート法又は修正マルカート法を用いるようにしたので、計算時間の短縮を図りつつ、収束安定性のよい最小自乗法を適用し、位置等の検出をすばやく高精度に行うことができる。
【0076】
実施の形態2.
上述の実施の形態では、(1)式に基づいて誘導起電力eの推定演算を行い、この値が電界信号に含まれる電界浮遊ノイズと同じ値であるとしてその後の演算を行った。ここで、例えば、電界検知器1の形状等によっては、単純に(1)式に当てはめて推定算出した誘導起電力eの値を、そのまま電界信号に含まれる電界浮遊ノイズの成分と同じものとして扱うわけにはいかない場合がある。そこで、例えば電界検知器1の形状等に応じた補正係数l(lx ,ly ,lz )を定め、次式(14)に示すように誘導起電力eに乗じて補正を行うようにする。そして、補正後の誘導起電力eの成分を時系列に推定した電界浮遊ノイズデータを生成する。これにより、電界検知器1の形状等、環境に応じた電界浮遊ノイズE’の値を算出することができる。ここで、
E’x =lx ・ex
E’y =ly ・ey …(14)
E’z =lz ・ez
【0077】
実施の形態3.
上述の実施の形態では、磁気検知器2からの磁界信号に基づく磁界信号データの値を装置が設けられた位置における地磁気の値とし、磁界信号データ及び潮流データに基づいて誘導起電力eを算出した。本発明はこれに限定するものではない。
【0078】
ここで、厳密には、装置が設けられた位置における地磁気も一定ではなく、変化することが多いが、地磁気の変動のみによる海水との間の相対的な速度変化によっては、電界浮遊ノイズとなり得る誘導起電力eは発生しないと考えられる。また、例えば、磁気嵐等による変動が無視できるほど小さいものであれば、例えば、誘導起電力推定器6が、あらかじめ装置を設ける位置における地磁気に関するデータを磁界信号データとして記憶しておき、潮流計3による潮流データに基づいて、実施の形態1と同様に間で誘導起電力eを推定演算を行うようにしてもよい。
【0079】
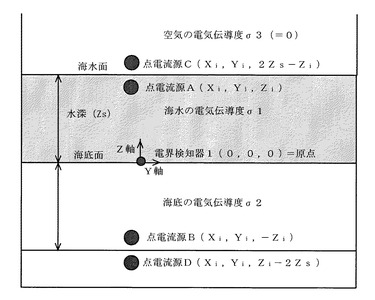
実施の形態4.
図4は船体における点電流源(電極)に対する鏡像点電流源(鏡像電極)を表す図である。海水中に生じる電界(これが電界信号となる)は、海水と誘電率(電気伝導率)が異なる大気及び海底の境界(海水面及び海底面)の影響を最も大きく受けることが考えられる。そこで、鏡像理論を利用して船体における点電流源に対する鏡像点電流源を仮想的において、すべての点電流源により生じる電界の和を海水に生じる電界(電界信号)とする(船体壁、海水温度等が電界に影響を与えることもあると考えられるが、すべての影響を考慮することは困難であり、また、無視できる程度の影響であるため、ここでは省略する)。
【0080】
ここで、鏡像理論とは、例えば2種類の異なる誘電媒体(海水と大気、海水と海底)が界面(海水面、海底面)で接しているような場合に、一方の媒体中の電荷(点電流源、電極)によって生じる電界を、境界条件を考慮して直接解かず、実際には電荷のないもう一方の媒体中に仮想的に電荷(点電流源、電極)を設けて電界を求める手法である。この場合、境界条件を乱さずに電界を求めることができる。
【0081】
本実施の形態では、仮想的に鏡像点電流源を設けて(置いて)電界の理論値を計算をすることで実測値との間のずれを少なくし、さらに精確な位置検出等を行う。位置等推定検出部9bの処理は異なるものの、第1の実施の形態の移動体位置等検出装置と構成は同じであるので、本実施の形態でも図1を用いて説明する。
【0082】
本実施の形態では(a)船体における各点電流源Aに対して、
(b) (a)の点電流源と海水面を挟んで対になる鏡像点電流源(以下、鏡像点電流源Bという)
(c) (a)の点電流源と海底面を挟んで対になる鏡像点電流源(以下、鏡像点電流源Cという)
(d) (b)の鏡像点電流源と海底面を挟んで対になる鏡像点電流源(以下、鏡像点電流源Dという)
の3つの鏡像点電流源を仮想的に置いてそれぞれの点電流源に係る電界を算出することとする。その他の条件に基づく鏡像点電流源も考えられるが、無視できるほど小さい値であるものとしてここでは省略する(鏡像点電流源Dも、場合によっては無視できることもある)。
【0083】
船体に設けた点電流源(電極)における電流値をIA (第1の実施の形態におけるIi )とすると、仮想的点電流源の電流値IB は次式(15)で表される。同様に、電流値IC 電流値ID は次式(16)、(17)で表される。ここで、本実施の形態では、第1の実施の形態で説明した(3)〜(5)で表される電界の各成分を(EAx,EAy,EAz)として表すことにする。
IB =(σ1 −σ2 )IA /(σ1 +σ2 ) …(15)
IC =(σ1 −σ3 )IA /(σ1 +σ3 ) …(16)
ID =(σ1 −σ2 )IA /(σ1 +σ2 ) …(17)
【0084】
また、(15)〜(17)式に基づいて考えると、鏡像点電流源Bにより生じる電界は次式(18)〜(20)で表される。
EBx={(σ1 −σ2 )Iσi/(σ1 +σ2 ) }・Xi
/{Xi2+Yi2+(−Zi)2}3/2 …(18)
EBy={(σ1 −σ2 )Iσi/(σ1 +σ2 )}・Yi
/{Xi2+Yi2+(−Zi)2}3/2 …(19)
EBZ={(σ1 −σ2 )Iσi/(σ1 +σ2 )}・(−Zi)
/{Xi2+Yi2+(−Zi)2}3/2 …(20)
【0085】
同様に、鏡像点電流源Cにより生じる電界は次式(21)〜(23)で表される。
ECx={(σ1 −σ3 )Iσi/(σ1 +σ3 )}・Xi
/{Xi2+Yi2+(2Zs−Zi)2}3/2 …(21)
ECy={(σ1 −σ3 )Iσi/(σ1 +σ3 )}・Yi
/{Xi2+Yi2+(2Zs−Zi)2}3/2 …(22)
ECZ={(σ1 −σ3 )Iσi/(σ1 +σ3 )}・(2Zs−Zi)
/{Xi2+Yi2+(2Zs−Zi)2}3/2 …(23)
【0086】
さらに、鏡像点電流源Dにより生じる電界は次式(24)〜(26)で表される。
EDx={(σ1 −σ2 )Iσi/(σ1 +σ2 )}・Xi
/{Xi2+Yi2+(Zi−2Zs)2}3/2 …(24)
EDy={(σ1 −σ2 )Iσi/(σ1 +σ2 )}・Yi
/{Xi2+Yi2+(Zi−2Zs)2}3/2 …(25)
EDZ={(σ1 −σ2 )Iσi/(σ1 +σ2 )}・(Zi−2Zs)
/{Xi2+Yi2+(Zi−2Zs)2}3/2 …(26)
【0087】
ここで、
σ1 :海水の電気伝導度
σ2 :海底の電気伝導度
σ3 :空気の電気伝導度(=0)
Zs:水深
である。
【0088】
そして、電界(Ex ,Ey ,Ez )は、最終的には、例えば次式(27)〜(29)のように各点電流源(点電流源)の和で表されることになる。ここで、環境条件等によってはすべての鏡像点電流源を考慮しない方が現実的となることもあるし、また、すべての項を加算すると計算量も多くなるので、(27)〜(29)式中、1又は複数の項を省略してもよい。
Ex =EAx+EBx+ECx+EDx …(27)
Ey =EAy+EBy+ECy+EDy …(28)
Ez =EAz+EBz+ECz+EDz …(29)
【0089】
以上により算出した(Ex ,Ey ,Ez )に基づいて、第1の実施の形態と同様に、最小自乗法によりパラメータの値を計算し、決定する。ここで、本実施の形態においては、(8)式に示したパラメータの他に、例えば、σ2 、σ1 −σ2 、σ1 +σ2 等、海底の電気伝導度σ2 を含んだパラメータが追加される。ここでは、特にσ* =(σ1 −σ2 )/(σ1 +σ2 )としたσ* (導電率比)をパラメータとして追加することにする。したがって、位置推定等を行うためのパラメータは次式(30)のように設定される。
ae =(Iσi,di ,X0 ,Y0 ,Zi ,V,α,σ* ) …(30)
【0090】
ここで、(27)〜(29)式において相似となるパラメータの組み合わせが存在するかどうかを検証する。電界信号は、位置、速度等の複数のパラメータの値が組み合わさることでその信号波形が形成される。相似とは、同一の電界信号波形であっても、値の組合せが無数にある場合をいう。このとき、その信号から推定する位置、速度等のパラメータが一意に決まらず、不定となる。相似となるパラメータは、次式(31)において、k=1、k’=1の組み合わせ以外で(27)〜(29)式を満たすk、k’により決まるパラメータをいう。相似となるパラメータが存在すると、k、k’は任意の値を採ることができるため、その組み合わせは無限に存在することになり、移動体速度、初期位置等のパラメータの値が1組に決定できないことになる。
ae =(k’Iσi,kdi ,kX0 ,kY0 ,kZi ,kV,α,σ* )…(31)
【0091】
そして、(30)式のパラメータに基づく(27)〜(29)式と、(31)式のパラメータに基づく(27)〜(29)式との恒等式を考える。この恒等式を満たすk、k’の値はたかだか有限個である。そして、これらの値の中で、数学的には存在したとしても、少なくとも現実的な移動体(特に船舶)の範囲内で採り得る値は、k=1、k’=1の組み合わせしか存在しない。(これは(27)〜(29)式における第2〜第4項のうち、1又は2の項を省略しても同じである。)したがって、(27)〜(29)式からは移動体の速度、初期位置等のパラメータを1組に決定することができる。これにより、水上を航行する船舶、海中の移動体の速度、位置等も推定することができる。
【0092】
ここで、決定したパラメータの値において、σ* >1となることがある。この場合には、決定したパラメータの値に対して、以下に示す補正を行った値を、あらためてパラメータの値として決定する。σ* >1の場合、移動体の移動方向は反転することになる(点電流源の方向関係もその方向に伴って反転する)。
補正後のIσi:−Iσi(補正前)×σ*(補正前)
補正後のα :α(補正前)−180゜
補正後のσ* :1/σ*(補正前)
【0093】
以上のように実施の形態4によれば、海水面及び海底面での境界条件を考慮し、仮想的に鏡像点電流源(電極)を設け、船舶上の点電流源からの電界と鏡像点電流源(電極)による電界との和を船舶により生ずる電界として式を設定し、位置等推定検出部9bが、最小自乗法を適用して電界信号に基づく値を満足するようにパラメータの値を一意に決定し、決定した値に基づいて海面、海中を移動する移動体の現在及び/又は将来の位置を推定検出するようにしたので、より現実に近い結果を得るようにし、精確に位置等の推定、検出を行うことができる。また、海面を航行する船舶について、船舶の大きさ(排水量)によって、プロペラ、舵等、点電流源の深さも変わる(基本的に重いほど海面から深い位置となる)ことから、例えば、決定した点電流源の高さ(電界検知器1とのZ軸方向の距離)のパラメータに基づいて、船舶の大きさ(排水量)を推定することもできるようになる。
【0094】
実施の形態5.
上述した実施の形態1では、複数の点電流源(電極)が船体長方向に一列に並べられたものとして説明を行った。ここでは、例えば複数の点電流源が左舷及び右舷(船幅方向)の2列に配置された船舶を考慮した場合について考える。この場合、船体長方向のパラメータであるdi だけでなく、さらに次のパラメータdwiを追加する。これにより、さらに理論式を現実のものに近づけることができ、精確に位置等の推定、検出を行うことができる。
dwi:各点電流源の船幅方向の間隔
【0095】
実施の形態6.
上述の実施の形態4においては、点電流源に基づく理論に対して鏡像理論を適用し、理論式を設定するようにしたが、これに限定するものではない。例えば、ダイポールモーメントに基づく理論においても、鏡像理論を適用して実施の形態4で説明したように、各媒体の誘電率から鏡像点電流源による電界の式の和を用いて理論式を設定することができる。また、信号として磁気を検知して位置等の推定検出を行う場合についても、最小自乗法に用いるための理論式に、透磁率が異なる媒体間において鏡像理論を適用することができる。
【図面の簡単な説明】
【0096】
【図1】本発明の第1の実施の形態に係る移動体位置等検出装置の構成ブロック図である。
【図2】移動体の位置と電界信号との関係を表す図である。
【図3】移動体と点電流源との関係を表す図である。
【図4】船体における点電流源に対する鏡像点電流源(電極)を表す図である。
【符号の説明】
【0097】
1 電界検知器、2 磁気検知器、3 潮流計、4a、4b、4c A/D変換器、5 傾斜計、6 誘導起電力推定器、7 電界信号処理器、8 データ収集器、8A データ処理部、8B データ記録部、9 位置等推定検出器、9a 電界信号データ補正部、9b 位置等推定検出部。
【特許請求の範囲】
【請求項1】
海中に設けられた検知計測手段により、少なくとも電界及び海水の速度を計測し、前記海水の速度並びに計測された又は定められた地磁気による磁束密度のデータに基づいて海水が地磁気を横切ることによって生じる誘導起電力に基づく値を算出する工程と、
前記電界から前記誘導起電力に基づく値の成分を除去する工程と
を有することを特徴とする電界検出方法。
【請求項2】
海中に設けられた検知計測手段により、少なくとも電界及び海水の速度を時系列に計測していき、前記海水の速度並びに計測された又は定められた地磁気による磁束密度のデータに基づいて、海水が地磁気を横切ることによって生じる誘導起電力の値を算出し、前記電界から誘導起電力の成分を除去して、海面又は海中を航行する移動体により生じる電界のデータを算出する工程と、
推定検出手段が、残差を用いた最小自乗法を適用して、前記移動体により生じる電界のデータの値が点電流源に係る理論式を満足するようなパラメータの値を決定し、決定した前記パラメータの値に基づいて少なくとも前記移動体の現在及び/又は将来の位置を推定検出する工程と
を有することを特徴とする移動体位置等推定検出方法。
【請求項3】
海中に設けられた検知計測手段により、少なくとも電界及び海水の速度を時系列に計測していき、前記海水の速度並びに計測された又は定められた地磁気による磁束密度のデータに基づいて、海水が地磁気を横切ることによって生じる誘導起電力の値を算出し、前記電界から誘導起電力の成分を除去して、海面又は海中を航行する移動体により生じる電界のデータを算出する工程と、
推定検出手段が、前記移動体により生じる電界成分と海水面及び海底面を境界として仮想的に設定した鏡像電極に基づく電界成分との和で表す式を満足するようなパラメータの値を決定し、決定した前記パラメータの値に基づいて少なくとも前記移動体の現在及び/又は将来の位置を推定検出する工程と
を有することを特徴とする移動体位置等推定検出方法。
【請求項4】
海水及び海底の電気伝導度を含むパラメータについて、さらに値を決定することを特徴とする請求項3記載の移動体位置等推定検出方法。
【請求項5】
前記最小自乗法にはガウス・ニュートン法を適用することを特徴とする請求項2〜4のいずれかに記載の移動体位置等推定検出方法。
【請求項6】
前記移動体の速度及び前記電界の信号の受信位置との最接近位置をさらに推定検出することを特徴とする請求項2〜5のいずれかに記載の移動体位置等推定検出方法。
【請求項7】
前記電界の強度又は前記パラメータの値に基づいて前記移動体又はその種別を判断することを特徴とする請求項2〜6のいずれかに記載の移動体位置等推定検出方法。
【請求項8】
電界を3軸方向の各成分で検知する電界検知手段と、
海水の速度を3軸方向の各成分で計測する潮流計測手段と、
前記海水の速度並びに計測された又は定められた地磁気による磁束密度の各成分のデータに基づいて、発生する誘導起電力に基づく演算を行って電界浮遊ノイズデータを生成する誘導起電力推定手段と、
前記電界浮遊ノイズデータにより、前記電界に基づくデータを補正する電界補正手段と
を備えたことを特徴とする電界検出装置。
【請求項9】
磁界を3軸方向の各成分で検知する磁界検知手段をさらに備え、
前記誘導起電力推定手段は、前記磁界に基づく前記地磁気による磁束密度の各成分のデータにより演算を行うことを特徴とする請求項8記載の電界検出装置。
【請求項10】
電界を3軸方向の各成分で検知する電界検知手段と、
海水の速度を3軸方向の各成分で計測する潮流計測手段と、
前記海水の速度並びに計測された又は定められた地磁気による磁束密度の各成分のデータに基づいて、発生する誘導起電力に基づく演算を行って電界浮遊ノイズデータを生成する誘導起電力推定手段と、
前記電界検知手段が検知した電界のデータ及び前記電界浮遊ノイズデータを時系列に記録するデータ記録手段と、
前記電界浮遊ノイズデータにより前記電界に基づくデータを補正する電界補正手段と、
該電界補正手段が補正した前記電界のデータの値が、点電流源に係る電界の理論式を満足するように、あらかじめ定めた収束条件を満たすまで、残差を用いた最小自乗法による反復計算を行ってパラメータの値を決定し、決定した前記パラメータの値に基づいて少なくとも前記移動体の現在及び/又は将来の位置を推定検出する検出手段と
を備えたことを特徴とする移動体位置等推定検出装置。
【請求項11】
電界を3軸方向の各成分で検知する電界検知手段と、
海水の速度を3軸方向の各成分で計測する潮流計測手段と、
前記海水の速度並びに計測された又は定められた地磁気による磁束密度の各成分のデータに基づいて、発生する誘導起電力に基づく演算を行って電界浮遊ノイズデータを生成する誘導起電力推定手段と、
前記電界検知手段が検知した電界のデータ及び前記電界浮遊ノイズデータを時系列に記録するデータ記録手段と、
前記電界浮遊ノイズデータにより前記電界に基づくデータを補正する電界補正手段と、
該電界補正手段が補正した前記電界のデータの値が、移動体である海面又は海中を航行する船舶から直接発せられる電界成分と海水面及び海底面を境界として仮想的に設定した鏡像電極に基づく電界成分との和で表す式を満足するようなパラメータの値を、残差を用いた最小自乗法を適用して決定し、決定した前記パラメータの値に基づいて少なくとも前記移動体の現在及び/又は将来の位置を推定検出する検出手段と
を備えたことを特徴とする移動体位置等推定検出装置。
【請求項12】
磁界を3軸方向の各成分で検知する磁界検知手段をさらに備え、
前記誘導起電力推定手段は、前記磁界に基づく前記地磁気による磁束密度の各成分のデータにより演算を行うことを特徴とする請求項10又は11記載の電界検出装置。
【請求項13】
前記検出手段は、前記パラメータの値に基づいて前記移動体の速度及び前記検知手段との最接近位置をさらに推定検出することを特徴とする請求項10〜12のいずれかに記載の移動体位置等推定検出装置。
【請求項14】
前記検出手段は、前記物理量の大きさ又は前記パラメータの値に基づいて、前記移動体又はその種別を判断することを特徴とする請求項10〜12のいずれかに記載の移動体位置等推定検出装置。
【請求項15】
(計測された又は定められた地磁気による磁束密度並びに)海中に設けられた手段から得られた海水の速度のデータに基づいて、海水が地磁気を横切ることによって生じる誘導起電力に基づく値をデータとして算出する工程と、
海中の電界のデータから前記誘導起電力に基づく値の成分を除去して補正した前記電界のデータを算出する工程と
をコンピュータに行わせることを特徴とする電界検出方法のプログラム。
【請求項16】
(計測された又は定められた地磁気による磁束密度並びに)海中に設けられた手段から得られた海水の速度のデータに基づいて、海水が地磁気を横切ることによって生じる誘導起電力の値を算出し、海中の電界のデータから前記誘導起電力の成分を除去して、海面又は海中を航行する移動体により生じる電界をデータとして時系列に算出する工程と、
残差を用いた最小自乗法を適用して、前記移動体により生じる電界のデータの値が点電流源に係る理論式を満足するようなパラメータの値を決定し、決定した前記パラメータの値に基づいて少なくとも前記移動体の現在及び/又は将来の位置を推定検出する工程と
をコンピュータに行わせることを特徴とする移動体位置等推定検出方法のプログラム。
【請求項17】
(計測された又は定められた地磁気による磁束密度並びに)海中に設けられた手段から得られた海水の速度のデータに基づいて、海水が地磁気を横切ることによって生じる誘導起電力の値を算出し、海中の電界のデータから前記誘導起電力の成分を除去して、海面又は海中を航行する移動体により生じる電界をデータとして時系列に算出する工程と、
前記移動体により生じる電界成分と海水面及び海底面を境界として仮想的に設定した鏡像電極に基づく電界成分との和で表す式を満足するようなパラメータの値を決定する工程と、
決定した前記パラメータの値に基づいて、少なくとも前記移動体の現在及び/又は将来の位置を推定検出する工程と
をコンピュータに行わせることを特徴とする移動体位置等推定検出方法のプログラム。
【請求項18】
海水及び海底の電気伝導度を含むパラメータに対する値の決定をさらにコンピュータに行わせることを特徴とする請求項17記載の移動体位置等推定検出方法のプログラム。
【請求項19】
前記パラメータの値に基づいて前記移動体の速度及び前記電界の信号の受信位置との最接近位置の推定検出をさらにコンピュータに行わせることを特徴とする請求項16〜18のいずれかに記載の移動体位置等推定検出方法のプログラム。
【請求項20】
前記電界の強度又は前記パラメータの値に基づいて前記移動体又はその種別の判断をさらにコンピュータに行わせることを特徴とする請求項16〜18のいずれかに記載の移動体位置等推定検出方法のプログラム。
【請求項1】
海中に設けられた検知計測手段により、少なくとも電界及び海水の速度を計測し、前記海水の速度並びに計測された又は定められた地磁気による磁束密度のデータに基づいて海水が地磁気を横切ることによって生じる誘導起電力に基づく値を算出する工程と、
前記電界から前記誘導起電力に基づく値の成分を除去する工程と
を有することを特徴とする電界検出方法。
【請求項2】
海中に設けられた検知計測手段により、少なくとも電界及び海水の速度を時系列に計測していき、前記海水の速度並びに計測された又は定められた地磁気による磁束密度のデータに基づいて、海水が地磁気を横切ることによって生じる誘導起電力の値を算出し、前記電界から誘導起電力の成分を除去して、海面又は海中を航行する移動体により生じる電界のデータを算出する工程と、
推定検出手段が、残差を用いた最小自乗法を適用して、前記移動体により生じる電界のデータの値が点電流源に係る理論式を満足するようなパラメータの値を決定し、決定した前記パラメータの値に基づいて少なくとも前記移動体の現在及び/又は将来の位置を推定検出する工程と
を有することを特徴とする移動体位置等推定検出方法。
【請求項3】
海中に設けられた検知計測手段により、少なくとも電界及び海水の速度を時系列に計測していき、前記海水の速度並びに計測された又は定められた地磁気による磁束密度のデータに基づいて、海水が地磁気を横切ることによって生じる誘導起電力の値を算出し、前記電界から誘導起電力の成分を除去して、海面又は海中を航行する移動体により生じる電界のデータを算出する工程と、
推定検出手段が、前記移動体により生じる電界成分と海水面及び海底面を境界として仮想的に設定した鏡像電極に基づく電界成分との和で表す式を満足するようなパラメータの値を決定し、決定した前記パラメータの値に基づいて少なくとも前記移動体の現在及び/又は将来の位置を推定検出する工程と
を有することを特徴とする移動体位置等推定検出方法。
【請求項4】
海水及び海底の電気伝導度を含むパラメータについて、さらに値を決定することを特徴とする請求項3記載の移動体位置等推定検出方法。
【請求項5】
前記最小自乗法にはガウス・ニュートン法を適用することを特徴とする請求項2〜4のいずれかに記載の移動体位置等推定検出方法。
【請求項6】
前記移動体の速度及び前記電界の信号の受信位置との最接近位置をさらに推定検出することを特徴とする請求項2〜5のいずれかに記載の移動体位置等推定検出方法。
【請求項7】
前記電界の強度又は前記パラメータの値に基づいて前記移動体又はその種別を判断することを特徴とする請求項2〜6のいずれかに記載の移動体位置等推定検出方法。
【請求項8】
電界を3軸方向の各成分で検知する電界検知手段と、
海水の速度を3軸方向の各成分で計測する潮流計測手段と、
前記海水の速度並びに計測された又は定められた地磁気による磁束密度の各成分のデータに基づいて、発生する誘導起電力に基づく演算を行って電界浮遊ノイズデータを生成する誘導起電力推定手段と、
前記電界浮遊ノイズデータにより、前記電界に基づくデータを補正する電界補正手段と
を備えたことを特徴とする電界検出装置。
【請求項9】
磁界を3軸方向の各成分で検知する磁界検知手段をさらに備え、
前記誘導起電力推定手段は、前記磁界に基づく前記地磁気による磁束密度の各成分のデータにより演算を行うことを特徴とする請求項8記載の電界検出装置。
【請求項10】
電界を3軸方向の各成分で検知する電界検知手段と、
海水の速度を3軸方向の各成分で計測する潮流計測手段と、
前記海水の速度並びに計測された又は定められた地磁気による磁束密度の各成分のデータに基づいて、発生する誘導起電力に基づく演算を行って電界浮遊ノイズデータを生成する誘導起電力推定手段と、
前記電界検知手段が検知した電界のデータ及び前記電界浮遊ノイズデータを時系列に記録するデータ記録手段と、
前記電界浮遊ノイズデータにより前記電界に基づくデータを補正する電界補正手段と、
該電界補正手段が補正した前記電界のデータの値が、点電流源に係る電界の理論式を満足するように、あらかじめ定めた収束条件を満たすまで、残差を用いた最小自乗法による反復計算を行ってパラメータの値を決定し、決定した前記パラメータの値に基づいて少なくとも前記移動体の現在及び/又は将来の位置を推定検出する検出手段と
を備えたことを特徴とする移動体位置等推定検出装置。
【請求項11】
電界を3軸方向の各成分で検知する電界検知手段と、
海水の速度を3軸方向の各成分で計測する潮流計測手段と、
前記海水の速度並びに計測された又は定められた地磁気による磁束密度の各成分のデータに基づいて、発生する誘導起電力に基づく演算を行って電界浮遊ノイズデータを生成する誘導起電力推定手段と、
前記電界検知手段が検知した電界のデータ及び前記電界浮遊ノイズデータを時系列に記録するデータ記録手段と、
前記電界浮遊ノイズデータにより前記電界に基づくデータを補正する電界補正手段と、
該電界補正手段が補正した前記電界のデータの値が、移動体である海面又は海中を航行する船舶から直接発せられる電界成分と海水面及び海底面を境界として仮想的に設定した鏡像電極に基づく電界成分との和で表す式を満足するようなパラメータの値を、残差を用いた最小自乗法を適用して決定し、決定した前記パラメータの値に基づいて少なくとも前記移動体の現在及び/又は将来の位置を推定検出する検出手段と
を備えたことを特徴とする移動体位置等推定検出装置。
【請求項12】
磁界を3軸方向の各成分で検知する磁界検知手段をさらに備え、
前記誘導起電力推定手段は、前記磁界に基づく前記地磁気による磁束密度の各成分のデータにより演算を行うことを特徴とする請求項10又は11記載の電界検出装置。
【請求項13】
前記検出手段は、前記パラメータの値に基づいて前記移動体の速度及び前記検知手段との最接近位置をさらに推定検出することを特徴とする請求項10〜12のいずれかに記載の移動体位置等推定検出装置。
【請求項14】
前記検出手段は、前記物理量の大きさ又は前記パラメータの値に基づいて、前記移動体又はその種別を判断することを特徴とする請求項10〜12のいずれかに記載の移動体位置等推定検出装置。
【請求項15】
(計測された又は定められた地磁気による磁束密度並びに)海中に設けられた手段から得られた海水の速度のデータに基づいて、海水が地磁気を横切ることによって生じる誘導起電力に基づく値をデータとして算出する工程と、
海中の電界のデータから前記誘導起電力に基づく値の成分を除去して補正した前記電界のデータを算出する工程と
をコンピュータに行わせることを特徴とする電界検出方法のプログラム。
【請求項16】
(計測された又は定められた地磁気による磁束密度並びに)海中に設けられた手段から得られた海水の速度のデータに基づいて、海水が地磁気を横切ることによって生じる誘導起電力の値を算出し、海中の電界のデータから前記誘導起電力の成分を除去して、海面又は海中を航行する移動体により生じる電界をデータとして時系列に算出する工程と、
残差を用いた最小自乗法を適用して、前記移動体により生じる電界のデータの値が点電流源に係る理論式を満足するようなパラメータの値を決定し、決定した前記パラメータの値に基づいて少なくとも前記移動体の現在及び/又は将来の位置を推定検出する工程と
をコンピュータに行わせることを特徴とする移動体位置等推定検出方法のプログラム。
【請求項17】
(計測された又は定められた地磁気による磁束密度並びに)海中に設けられた手段から得られた海水の速度のデータに基づいて、海水が地磁気を横切ることによって生じる誘導起電力の値を算出し、海中の電界のデータから前記誘導起電力の成分を除去して、海面又は海中を航行する移動体により生じる電界をデータとして時系列に算出する工程と、
前記移動体により生じる電界成分と海水面及び海底面を境界として仮想的に設定した鏡像電極に基づく電界成分との和で表す式を満足するようなパラメータの値を決定する工程と、
決定した前記パラメータの値に基づいて、少なくとも前記移動体の現在及び/又は将来の位置を推定検出する工程と
をコンピュータに行わせることを特徴とする移動体位置等推定検出方法のプログラム。
【請求項18】
海水及び海底の電気伝導度を含むパラメータに対する値の決定をさらにコンピュータに行わせることを特徴とする請求項17記載の移動体位置等推定検出方法のプログラム。
【請求項19】
前記パラメータの値に基づいて前記移動体の速度及び前記電界の信号の受信位置との最接近位置の推定検出をさらにコンピュータに行わせることを特徴とする請求項16〜18のいずれかに記載の移動体位置等推定検出方法のプログラム。
【請求項20】
前記電界の強度又は前記パラメータの値に基づいて前記移動体又はその種別の判断をさらにコンピュータに行わせることを特徴とする請求項16〜18のいずれかに記載の移動体位置等推定検出方法のプログラム。
【図1】

【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公開番号】特開2007−127589(P2007−127589A)
【公開日】平成19年5月24日(2007.5.24)
【国際特許分類】
【出願番号】特願2005−322163(P2005−322163)
【出願日】平成17年11月7日(2005.11.7)
【出願人】(502116922)ユニバーサル造船株式会社 (172)
【Fターム(参考)】
【公開日】平成19年5月24日(2007.5.24)
【国際特許分類】
【出願日】平成17年11月7日(2005.11.7)
【出願人】(502116922)ユニバーサル造船株式会社 (172)
【Fターム(参考)】
[ Back to top ]