
電磁サスペンション
【課題】磁極位置の検出を非接触で行うことができ、しかも、コストを低減することができる電磁サスペンションを提供する。
【解決手段】可動子7の永久磁石9の磁極位置を検出する磁極位置検出装置11を、固定子2に設ける。この磁極位置検出装置11は、固定子2に取付けられる被検出板12と、該被検出板12の先端側に取付けられる磁極位置検出用磁石13と、被検出板12の基端側に取付けられる歪センサ14とにより構成する。歪センサ14は、磁極位置検出用磁石13と可動子7の永久磁石9との吸引反発力により生じる被検出板12の曲げ歪を検出する。これにより、磁極位置検出装置11は、この曲げ歪に対応する永久磁石9の磁極位置を検出することができる。
【解決手段】可動子7の永久磁石9の磁極位置を検出する磁極位置検出装置11を、固定子2に設ける。この磁極位置検出装置11は、固定子2に取付けられる被検出板12と、該被検出板12の先端側に取付けられる磁極位置検出用磁石13と、被検出板12の基端側に取付けられる歪センサ14とにより構成する。歪センサ14は、磁極位置検出用磁石13と可動子7の永久磁石9との吸引反発力により生じる被検出板12の曲げ歪を検出する。これにより、磁極位置検出装置11は、この曲げ歪に対応する永久磁石9の磁極位置を検出することができる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、例えば自動車、鉄道車両等の車両の振動を緩衝するのに好適に用いられる電磁サスペンションに関する。
【背景技術】
【0002】
一般に、自動車等の車両には、車体側と各車軸側との間に緩衝器が設けられている。このような緩衝器として、互いに相対直線運動可能に支持された固定子と可動子とからなるリニアモータを用いた電磁サスペンションが知られている(例えば、特許文献1参照)。
【0003】
この種の従来技術による電磁サスペンションでは、例えば3相リニア同期モータ等により構成されるリニアモータに通電する電流を、固定子と可動子との位置(ストローク位置)に応じて転流操作することで、電磁サスペンションの全可動域(全ストローク領域)で目標通りの推力(減衰力)を発生させるようにしている。
【0004】
この場合、転流操作とは、3相リニア同期モータの磁石磁束に対して電気角で90度進んだ位相に通電することをいう。そして、電磁サスペンションの全可動域で、90度の電流位相を保つためには、磁石磁束の位置(磁極位置)を検出する必要がある。
【0005】
一方、特許文献2には、リニアモータによって駆動される移動部(走行テーブル)の位置検出を、ロータリエンコーダを用いて行う構成が開示されている。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2010−127383号公報
【特許文献2】特開平9−22318号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
特許文献2による従来技術では、移動部の移動に伴ってロータリエンコーダをワイヤによって回転させる構成となっているため、ロータリエンコーダとワイヤとの摺動面が摩耗する虞がある。このような技術を電磁サスペンションに用いると、摺動面の耐久性を十分に確保できない虞がある。
【0008】
一方、電磁サスペンションの磁極位置の検出を、例えば磁気センサを用いて非接触で行うことが考えられる。ただし、磁気センサは高価であり、コストが嵩むという問題がある。
【0009】
本発明は、上述した従来技術の問題に鑑みなされたもので、本発明の目的は、磁極位置の検出を非接触で行うことができ、しかも、コストを低減することができる電磁サスペンションを提供することにある。
【課題を解決するための手段】
【0010】
上述した課題を解決するため、本発明は、互いに相対直線運動可能に支持された第1部材と第2部材とのうちの一方の部材を固定子とし、前記第1部材と第2部材とのうちの他方の部材を可動子としてなるリニアモータを用いた電磁サスペンションに適用される。
【0011】
そして、本発明が採用する構成の特徴は、前記第1部材は、永久磁石を含んで構成され、前記第2部材には、前記永久磁石の磁極位置を検出する磁極位置検出手段を設け、該磁極位置検出手段は、磁石と、前記永久磁石との吸引反発力により生じる歪を検出する歪検出手段とから構成したことにある。
【発明の効果】
【0012】
本発明によれば、磁極位置の検出を非接触で行うことができ、しかも、コストを低減することができる。
【図面の簡単な説明】
【0013】
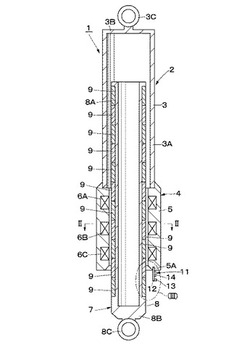
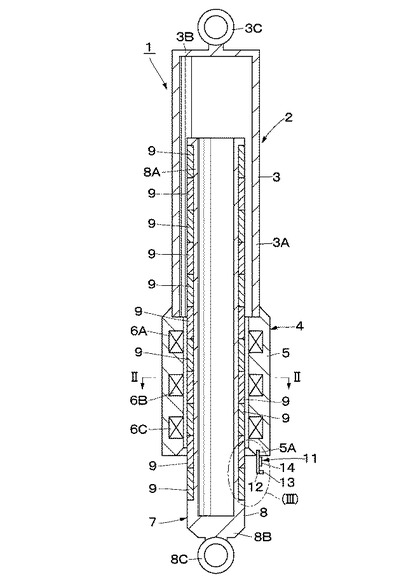
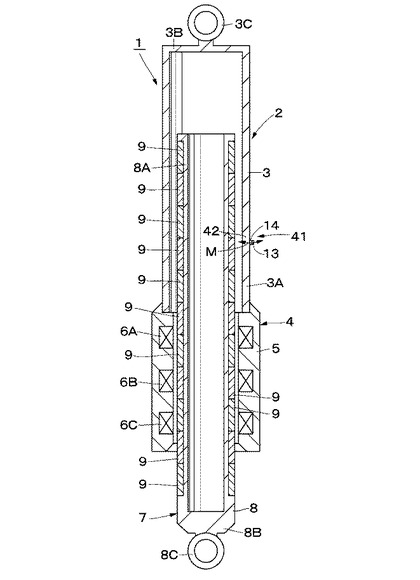
【図1】本発明の第1の実施の形態による電磁サスペンションを示す縦断面図である。
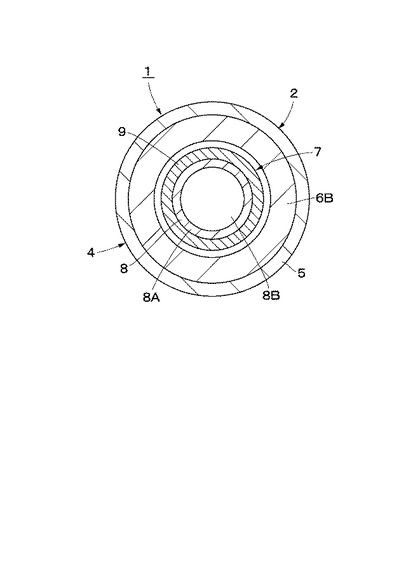
【図2】図1中の矢示II−II方向からみた拡大断面図である。
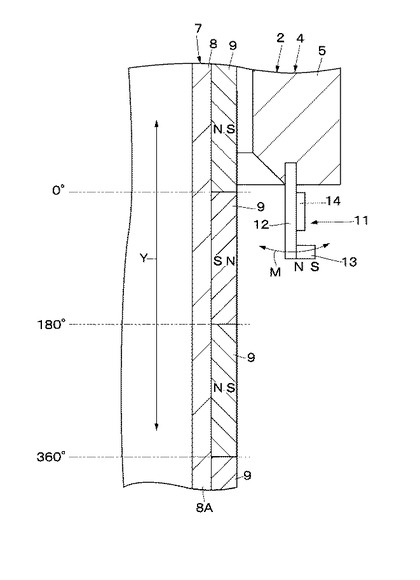
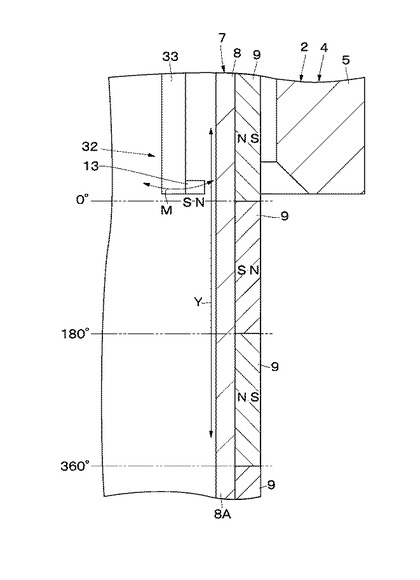
【図3】磁極位置検出装置等を示す図1中の(III)部に相当する拡大断面図である。
【図4】電気角と歪との関係の一例を示す特性線図である。
【図5】本発明の第2の実施の形態による電磁サスペンションを示す縦断面図である。
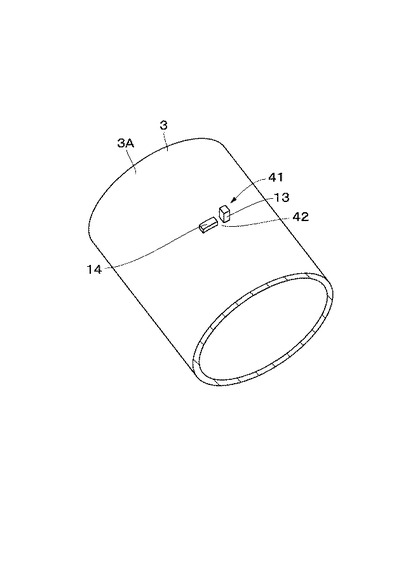
【図6】磁極位置検出装置等を示す拡大斜視図である。
【図7】本発明の第3の実施の形態による電磁サスペンションを示す縦断面図である。
【図8】磁極位置検出装置等を示す図7中の(VIII)部に相当する拡大断面図である。
【図9】本発明の第4の実施の形態による電磁サスペンションを示す縦断面図である。
【図10】磁極位置検出装置等を示す拡大斜視図である。
【発明を実施するための形態】
【0014】
以下、本発明の実施の形態による電磁サスペンションを、添付図面に従って詳細に説明する。
【0015】
図1ないし図4は本発明の第1の実施の形態を示している。図において、電磁サスペンション1は、リニアモータを用いた電磁サスペンションであり、固定子2と、可動子7と、磁極位置検出装置11とにより大略構成されている。そして、固定子2(の電機子4)と可動子7(の永久磁石9)とにより、3相リニア同期モータを構成している。
【0016】
ここで、固定子2と可動子7とは、互いに相対直線運動可能に支持された第1部材と第2部材であって、本実施の形態の場合は、第1部材と第2部材とのうちの第1部材を可動子7とし、第2部材を固定子2とした場合を例示している。しかし、これに限らず、第1部材を固定子とし、第2部材を可動子としてもよい。
【0017】
本実施の形態で第2部材に相当する固定子2は、ケーシング3と電機子4とにより大略構成されている。ここで、ケーシング3は、例えば有底円筒状に形成されたもので、ストローク方向となる軸方向(図1の上,下方向)に延びる筒部3Aと、該筒部3Aの一端側(図1の上端側)を閉塞する底部3Bとにより構成されている。底部3Bには、例えば車両のばね上部材(例えば車体)に取付けられる取付アイ3Cが設けられている。一方、筒部3Aの開口端側(図1の下端側)には、電機子4が固定されている。
【0018】
電機子4は、例えば圧粉磁心や積層された電磁鋼板、磁性体片より切削加工等によって形成された略筒状のコア5と、所定の方向に巻かれてコア5内に収納された複数のコイル6A,6B,6Cとによって構成されている。ここで、コア5の他端側(図1の下端側)の開口端面には、後述する磁極位置検出装置11の被検出板12を取付けるための係合部5Aが設けられている。
【0019】
一方、各コイル6A,6B,6Cは、後述の可動子7(の永久磁石9)の外周面と対向して配置されている。例えば、図2に示すように、コイル6A,6B,6Cは、略筒状のコア5の内周面側に位置して該コア5の周方向に配置されると共に、図1に示すように、略筒状のコア5の軸方向の3箇所位置に軸方向に離間して配置されている。なお、コイル6A,6B,6Cの個数は、図示したものに限らず、設計仕様等に応じて適宜設定することができる。
【0020】
ここで、軸方向に隣合う3個のコイル6A,6B,6Cは、例えば電気角で120度ずつの位相差をもつように配置される。配線方法は、駆動電源側の電圧や電流仕様に応じて適宜選択することができる。
【0021】
本実施の形態で第1部材に相当する可動子7は、固定子2内で軸方向に延び、図示しない軸受等を介して該固定子2内にストローク方向(軸方向)の変位を可能に収容されている。ここで、可動子7は、ヨーク8と、複数の永久磁石9とにより大略構成されている。
【0022】
ヨーク8は、例えば磁性体を用いて有底円筒状に形成され、ストローク方向となる軸方向に延びる筒部8Aと、筒部8Aの他端側(図1の下端側)を閉塞する底部8Bとにより構成されている。底部8Bには、例えば車両のばね下部材(例えば車軸)に取付けられる取付アイ8Cが設けられている。
【0023】
ヨーク8の筒部8Aの外周面側には、複数の円環状の永久磁石9が軸方向に沿って並んで配置されている。この場合、図3に示すように、軸方向で隣合う各永久磁石9は、例えば互いに逆極性になっている。
【0024】
ところで、固定子2の各コイル6A,6B,6Cに電流を流すと、これら各コイル6A,6B,6Cに流れる電流と、可動子7の永久磁石9との間に電磁力が生じ、この電磁力によって電磁サスペンション1は推力(減衰力)を発生する。
【0025】
この電磁力を制御し、目標通りの推力を発生させるためには、コイル6A,6B,6Cが発生する電流磁束が永久磁石9の1/2個分、即ち、電気角で90度分だけ、永久磁石9の磁束に対してずれるように、U相コイル6A、V相コイル6B、W相コイル6Cに流れる電流値を制御する。
【0026】
各相に流す電流値の制御方法としては、可動子7が電気角で360度移動する間にU相コイル6A、V相コイル6B、W相コイル6Cに流れる電流の向きを12通りで切換えることで、電流磁束と各永久磁石9の磁束の位相差を、90±15度に保つ、120度通電方式と呼ばれる制御方法や、U相コイル6A、V相コイル6B、W相コイル6Cそれぞれの電流の向きと大きさからなるベクトルを合成し、合成したベクトルが各永久磁石9の磁束と位相差を90度に保つように各層の電流を制御するベクトル制御方式と呼ばれる制御方法が一般に知られている。
【0027】
このような120度通電方式やベクトル制御方式で電流値の制御を行う場合、電流磁束と各永久磁石9との位相差を90度に保つためには、永久磁石9の磁極位置を検出する必要がある。そこで、本実施の形態では、永久磁石9の磁極位置を検出する磁極位置検出手段としての磁極位置検出装置11を、第2部材に相当する固定子2に設けている。
【0028】
磁極位置検出装置11は、被検出部としての被検出板12と、磁石としての磁極位置検出用磁石13と、歪検出手段としての歪センサ14とにより大略構成され、固定子2を構成する電機子4の他端側(図1および図3の下端側)に設けられている。
【0029】
被検出板12は、例えば非磁性体により板状ないし柱状に形成されたもので、その基端側(図1および図3の上端側)は、電機子4のコア5の係合部5Aに固定されている。図示の例では、被検出板12の基端をコア5の係合部5Aに凹凸係合させることにより固定しているが、このような固定構造に限定するものではない。
【0030】
一方、被検出板12の先端側(図1および図3の下端側)には、磁極位置検出用磁石13が接着ないし埋め込み等の手段を用いて取付けられている。さらに、被検出板12の基端側には、歪センサ14が貼り付けられている。
【0031】
磁極位置検出用磁石13は、図3に示すように、被検出板12の先端側に、磁極(N極またはS極)が可動子7の永久磁石9と対向するように取付けられている。これにより、磁極位置検出用磁石13と可動子7の永久磁石9との間には、可動子7の外周面に対して直交する方向(図1および図3の左,右方向)の磁気的な吸引反発力が生じるように構成している。
【0032】
本実施の形態の場合は、磁極位置検出用磁石13のN極側を可動子7の永久磁石9に対向させている。これにより、磁極位置検出用磁石13と永久磁石9のS極とが対向した場合には、吸引力が生じ、磁極位置検出用磁石13と永久磁石9のN極とが対向した場合には、反発力が生じる。なお、磁極位置検出用磁石13の磁極は逆にすることもできる。即ち、磁極位置検出用磁石13のS極側を可動子7の永久磁石9に対向する構成としてもよい。
【0033】
何れにしても、磁極位置検出用磁石13と可動子7の永久磁石9との間の磁気的な吸引反発力は、可動子7が軸方向(図3の矢印Y方向)に永久磁石9の2個分移動する毎に、即ち、電気角で360度の周期で、正弦波状に変化する。このような吸引反発力により、被検出板12には、該被検出板12とコア5との係合部(接合部)を中心として、可動子7の永久磁石9に近付く方向ないし離れる方向のモーメントMが加わる。これにより、被検出板12には、吸引反発力の大きさに応じた曲げ歪が発生する。
【0034】
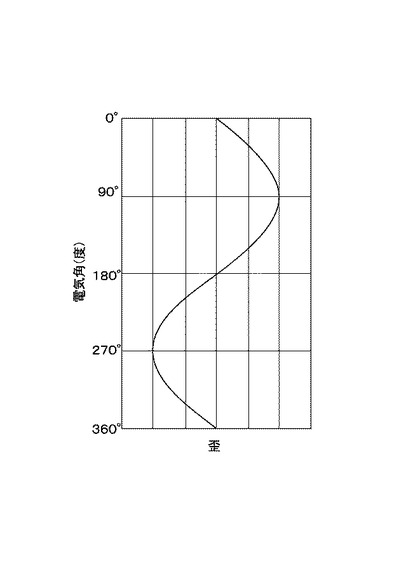
具体的には、図4に示すように、被検出板12の曲げ歪は、磁極位置検出用磁石13と可動子7の永久磁石9との間の吸引反発力の変化に従って、電気角360度周期で正弦波状に変化する。この場合、図3に示した角度は、図4の電気角度に対応する。本実施の形態の場合は、このような被検出板12の曲げ歪を後述の歪センサ14で検出することにより、この歪に対応する可動子7の永久磁石9の磁極位置を検出する(求める)構成となっている。
【0035】
歪センサ14は、磁極位置検出用磁石13と可動子7の永久磁石9との吸引反発力により被検出板12に生じる曲げ歪を検出するものである。ここで、歪センサ14は、例えばセンサ線を介してコントローラ(いずれも図示せず)に接続されている。歪センサ14の出力は、図4に示すように、電気角360度の周期で正弦波状に変化するため、例えばコントローラの演算器等で、歪センサ14の出力の規格化値を逆正弦関数に当てはめることで、永久磁石9の磁極位置を求めることができる。
【0036】
ここで、本実施の形態のよる歪検出手段としての歪センサ14について詳述する。本実施の形態に示す歪センサ14としては、従来から知られている歪ゲージの他、昨今開発された半導体歪ゲージを用いてもよい。
【0037】
まず、従来から知られている歪ゲージは、Cu−Ni系合金やNi−Cr系合金の金属薄膜の配線パターンを、可撓性のあるポリイミドやエポキシ樹脂フィルムで覆った構造であり、歪ゲージを被測定物に接着剤で接着して使用するもので、金属薄膜が歪を受けて変形したときの抵抗変化から、歪量を算出するものである。また、金属薄膜の歪ゲージでは、抵抗変化が小さいため、得られる電気信号を増幅する必要があり、そのため外部にアンプが必要となる。
【0038】
これに対し、半導体歪ゲージは、検知部を金属薄膜ではなく、シリコン等の半導体に不純物をドープして形成した半導体ピエゾ抵抗を利用したものである。半導体歪ゲージは、歪に対する抵抗変化率が金属薄膜を用いた従前の歪ゲージの数十倍と大きく、微小な歪、例えば、1με程度の歪を測定することが可能である。また、半導体歪ゲージは、抵抗変化が大きいため、得られた電気信号を外部のアンプを用いずに使用することもでき、さらには、半導体歪ゲージの数ミリ角のチップにアンプ回路や温度センサおよび温度補償回路、オフセット除去回路等を作りこむことも可能である。さらには、無線回路等を設けて、非接触でデータを取出すことも可能である。
【0039】
この半導体歪ゲージは、被測定物に接着剤や金属接合により固定することも可能であり、また、半導体歪ゲージを金属板に対し、スポット溶接により固定することも可能である。
【0040】
本実施の形態では、半導体歪ゲージを用いた方が歪量の測定精度が高く、取付スペースも少なくて済むので好ましいが、測定精度や取付スペースが許されれば、従来から知られている歪ゲージを用いてもよい。
【0041】
何れにしても、本実施の形態では、上述のような歪センサ14は、磁極位置検出装置11を構成する被検出板12の基端側に取付けられている。そして、歪センサ14は、磁極位置検出用磁石13と可動子7の永久磁石9との吸引反発力により生じる被検出板12の曲げ歪を検出することにより、この曲げ歪に対応する永久磁石9の磁極位置を磁極位置検出装置11で検出することができる。
【0042】
この場合、磁極位置検出装置11は、永久磁石9の磁極位置を、歪センサ14を用いて可動子7に対し非接触で検出することができる。このため、ロータリエンコーダ等を用いる従来技術のような、位置検出に伴って摩耗が生じることはなく、磁極位置検出装置11の耐久性を確保することができる。
【0043】
本実施の形態による電磁サスペンション1は、上述のような構成を有するもので、次にその作動について説明する。
【0044】
例えば、電磁サスペンション1を車両のばね下部材とばね上部材との間に介在させた場合は、車両が上,下方向に振動すると、電磁サスペンション1にはストローク方向(軸方向)に力が作用する。この力に応じて、可動子7と電機子4とが相対移動する。このとき、コイル6A,6B,6Cには、磁極位置検出装置11により検出される永久磁石9の磁極位置に応じて所定の電流を流すことにより、電磁サスペンション1の減衰力を調整することができ、車両の乗り心地や操縦安定性を向上させることができる。
【0045】
本実施の形態によれば、永久磁石9の磁極位置の検出を非接触で行うことができ、しかも、コストを低減することができる。
【0046】
即ち、磁極位置検出装置11を、磁極位置検出用磁石13と、該磁極位置検出用磁石13と可動子7の永久磁石9との吸引反発力に基づいて被検出板12に生じる歪を検出する歪センサ14とから構成している。このため、磁極位置検出装置11は、歪センサ14が検出する歪の大きさ(大小)に基づいて、該歪と対応する可動子7の永久磁石9の磁極位置を非接触で検出することができる。これにより、ロータリエンコーダ等を用いる従来技術のような、位置検出に伴って摩耗が生じることをなくすことができ、耐久性の確保を図ることができる。
【0047】
しかも、磁極位置検出装置11は、被検出板12と、磁極位置検出用磁石13と、歪センサ14とにより簡素に構成できると共に、例えば磁気センサ等と比較して安価な歪センサ14を用いることができる。このため、磁極位置検出装置11のコストを低減することができる。
【0048】
さらに、磁極位置検出装置11を構成する被検出板12は、非磁性体により形成しているので、磁極位置検出用磁石13と可動子7の永久磁石9との間の磁気的な吸引反発力を妨げることを抑制することができる。
【0049】
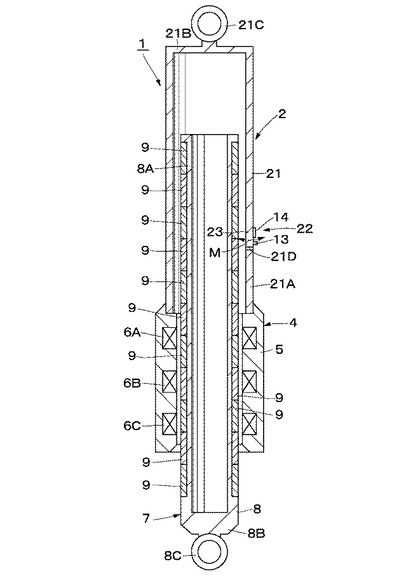
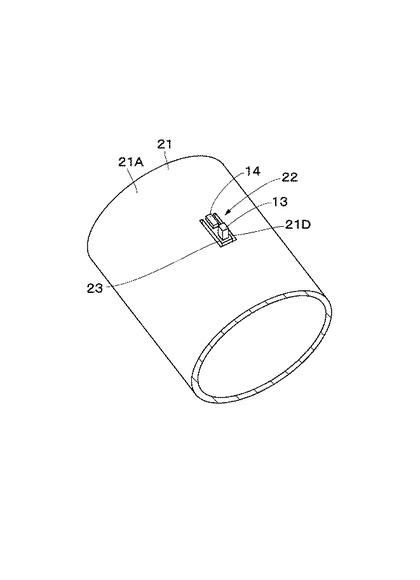
次に、図5および図6は本発明の第2の実施の形態を示している。本実施の形態の特徴は、磁極位置検出手段を、第2部材の軸方向中間部に設ける構成としたことにある。なお、本実施の形態では、上述した第1の実施の形態と同一の構成要素に同一の符号を付し、その説明を省略するものとする。
【0050】
固定子2は、ケーシング21と電機子4とにより大略構成されている。ここで、ケーシング21は、例えば有底円筒状に形成され、筒部21Aと、底部21Bとにより構成されている。底部21Bには、取付アイ21Cが設けられ、筒部21Aの開口端側(図5の下端側)には、電機子4が固定されている。
【0051】
ここで、筒部21Aの軸方向略中間部には、図6に示すように、略「コ」字状の切欠き(スリット)21Dが、筒部21Aの内周面と外周面との間を貫通するように形成されている。そして、この切欠き21Dにより囲まれた舌状の部位(舌片)を、磁極位置検出装置22の被検出部23としている。
【0052】
なお、このように被検出部23をケーシング21の筒部21Aに設けたことに伴って、固定子2を構成する電機子4のコア5の他端側(図5の下端側)の開口端面には、上述した第1の実施の形態のような係合部5Aは設けていない。
【0053】
永久磁石9の磁極位置を検出する磁極位置検出手段としての磁極位置検出装置22は、被検出部23と、磁石としての磁極位置検出用磁石13と、歪検出手段としての歪センサ14とにより大略構成され、固定子2を構成するケーシング21の軸方向略中間部に設けられている。
【0054】
被検出部23は、固定子2のケーシング21に切欠き21Dを形成することにより、略長方形状の舌片として片持ち支持状態でケーシング21に一体的に設けられている。そして、被検出部23の先端側(図5の下端側)には、磁極位置検出用磁石13が接着ないし埋め込み等の手段を用いて取付けられ、被検出部23の基端側(図5の上端側)には、歪センサ14が貼り付けられている。
【0055】
かくして、このように構成される第2の実施の形態においても、前述した第1の実施の形態とほぼ同様の作用効果を得ることができる。即ち、歪センサ14により、磁極位置検出用磁石13と可動子7の永久磁石9との吸引反発力により生じる被検出板12の曲げ歪を検出し、これにより、磁極位置検出装置22は、この曲げ歪に対応する永久磁石9の磁極位置を検出することができる。
【0056】
特に、本実施の形態によれば、磁極位置検出装置22の被検出部23を、ケーシング21に切欠き21Dを形成することにより該ケーシング21に一体に設ける構成としている。このため、第2部材を構成する部材と別体に被検出部を設ける構成に比べ、部品点数の低減を図ることができ、磁極位置検出装置22のコストのさらなる低減を図ることができる。
【0057】
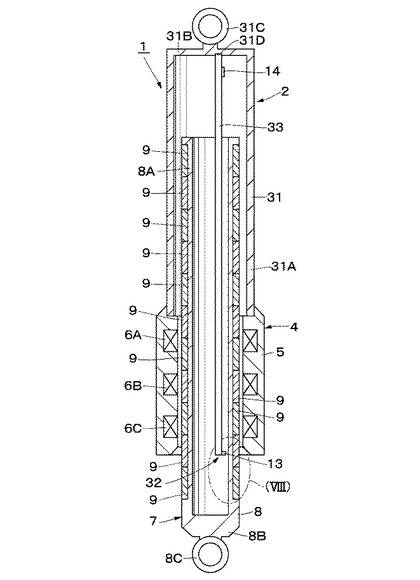
次に、図7および図8は、本発明の第3の実施の形態を示している。本実施の形態の特徴は、磁極位置検出手段を第1部材の内側に位置するように構成したことにある。なお、本実施の形態では、上述した第1の実施の形態と同一の構成要素に同一の符号を付し、その説明を省略するものとする。
【0058】
固定子2は、ケーシング31と電機子4とにより大略構成されている。ここで、ケーシング31は、例えば有底円筒状に形成され、筒部31Aと、底部31Bとにより構成されている。底部31Bには、取付アイ31Cが設けられ、筒部31Aの開口端側(図7の下端側)には、電機子4が固定されている。また、底部31Bのうち取付アイ31Cとは反対側となる内側面は、後述する磁極位置検出装置32の被検出棒33を取付けるための係合部31Dが設けられている。
【0059】
なお、このようにケーシングの底部31Bに係合部31Dを設けたことに伴って、固定子2を構成する電機子4のコア5の他端側(図7の下端側)の開口端面には、上述した第1の実施の形態のような係合部5Aは設けていない。
【0060】
永久磁石9の磁極位置を検出する磁極位置検出手段としての磁極位置検出装置32は、被検出部としての被検出棒33と、磁石としての磁極位置検出用磁石13と、歪検出手段としての歪センサ14とにより大略構成され、筒状の可動子7の内側に配置されている。
【0061】
被検出棒33は、例えば非磁性体により円柱状ないし角柱状、長板状に形成され、可動子7を構成するヨーク8の内側に延びている。そして、被検出棒33の基端側(図7の上端側)は、ケーシング31の底部31Bの係合部31Dに固定されている。図示の例では、被検出棒33の基端を係合部31Dに凹凸係合させることにより固定しているが、このような固定構造に限定するものではない。
【0062】
一方、被検出棒33の先端側(図7の下端側)には、磁極位置検出用磁石13が接着ないし埋め込み等の手段を用いて取付けられている。さらに、被検出棒33の基端側には、歪センサ14が貼り付けられている。
【0063】
なお、可動子7を構成するヨーク8は、可動子7の永久磁石9と磁極位置検出用磁石13との間の磁気的な吸引反発力を妨げることを抑制するために、非磁性体により形成することが好ましい。
【0064】
かくして、このように構成される第3の実施の形態においても、前述した第1の実施の形態とほぼ同様の作用効果を得ることができる。即ち、歪センサ14により、磁極位置検出用磁石13と可動子7の永久磁石9との吸引反発力により生じる被検出棒33の曲げ歪を検出し、これにより、磁極位置検出装置32は、この曲げ歪に対応する永久磁石9の磁極位置を検出することができる。
【0065】
特に、本実施の形態によれば、磁極位置検出装置32を、固定子2の内側で、かつ、可動子7の内側、即ち、電磁サスペンション1の内部に配置する構成としているので、磁極位置検出装置32を固定子2および可動子7により保護することができる。
【0066】
次に、図9および図10は、本発明の第4の実施の形態を示している。本実施の形態の特徴は、磁極位置検出手段を構成する磁石と歪検出手段を第2部材に直接取付ける構成としたことにある。なお、本実施の形態では、上述した第1の実施の形態と同一の構成要素に同一の符号を付し、その説明を省略するものとする。
【0067】
永久磁石9の磁極位置を検出する磁極位置検出手段としての磁極位置検出装置41は、被検出部42と、磁石としての磁極位置検出用磁石13と、歪検出手段としての歪センサ14とにより大略構成され、固定子2を構成するケーシング3の軸方向略中間部に設けられている。
【0068】
ここで、本実施の形態の場合は、ケーシング3の筒部3Aに、上述の第2の実施の形態のような切欠き21Dは形成していない。そして、このように切欠き21Dが形成されていないケーシング3の筒部3Aの一部を、磁極位置検出装置41を構成する被検出部42とし、この筒部3Aに、磁極位置検出用磁石13を接着ないし埋め込み等の手段を用いて取付けると共に、該磁極位置検出用磁石13の近傍に、歪センサ14を貼り付けている。換言すれば、本実施の形態の場合は、ケーシング3の筒部3Aのうち磁極位置検出用磁石13と歪センサ14とを取付けた部位を、磁極位置検出装置41の被検出部42としている。
【0069】
なお、歪センサ14は、該歪センサ14の感度方向が筒部3Aの周方向と一致するように、該筒部3Aに取付けられている。これにより、リニアモータの推力、即ち、電機子4と永久磁石9との間に発生する推力(発生力)に基づく筒部3Aの歪(軸方向の歪)と、可動子7の永久磁石9と磁極位置検出用磁石13との間の磁気的な吸引反発力による歪(軸方向および周方向の歪)とのうち、磁気的な吸引反発力に依存する歪(周方向の歪)のみを選択して検出(計測)できるように構成している。
【0070】
また、本実施の形態の場合は、可動子7の永久磁石9と磁極位置検出用磁石13との間の磁気的な吸引反発力による被検出部42(筒部3A)の歪量が小さくなるため、高感度の歪センサ14を用いると共に、該歪センサ14の出力を補正する補正回路、例えば、増幅回路、ノイズ除去回路(ハイパスフィルタ、ローパスフィルタ等のバンドパスフィルタ)、温度補正回路等を設けることが好ましい。
【0071】
かくして、このように構成される第4の実施の形態においても、前述した第1の実施の形態とほぼ同様の作用効果を得ることができる。即ち、歪センサ14により、磁極位置検出用磁石13と可動子7の永久磁石9との吸引反発力により生じる被検出部42(筒部3A)の曲げ歪を検出し、これにより、磁極位置検出装置41は、この曲げ歪に対応する永久磁石9の磁極位置を検出することができる。
【0072】
特に、本実施の形態によれば、被検出部42をケーシング3の筒部3Aとし、この筒部3Aには、上述の第2の実施の形態のような切欠き21Dは形成していない。このため、磁極位置検出装置41をより簡素に構成することができ、さらなるコストの低減を図ることができる。
【0073】
なお、上述した各実施の形態では、互いに相対直線運動可能に支持された第1部材と第2部材とのうちの第1部材を可動子7とし、第2部材を固定子2とした場合を例に挙げて説明した。しかし、これに限らず、例えば、第1部材と第2部材とのうちの第1部材を固定子とし、第2部材を可動子としてもよい。
【0074】
上述した各実施の形態では、固定子2を車両のばね上部材(例えば車体)に取付けると共に、可動子7を車両のばね下部材(例えば車軸)に取付ける構成とした場合を例に挙げて説明した。しかし、これに限らず、例えば、固定子を車両のばね下部材に取付けると共に、可動子を車両のばね上部材に取付ける構成としてもよい。
【0075】
上述した各実施の形態では、電磁サスペンション1を縦置き状態で自動車等の車両に取付ける構成とした場合を例に挙げて説明したが、これに限らず、例えば、電磁サスペンションを横置き状態で鉄道車両等の車両に取付ける構成としてもよい。
【0076】
上述した各実施の形態では、電磁サスペンション1を車両に取付ける構成とした場合を例に挙げて説明したが、これに限らず、例えば、振動源となる種々の機械、建築物等に用いる電磁サスペンションに用いてもよい。
【0077】
さらに、上述した各実施の形態では、横断面形状が円形のリニアモータ、即ち、固定子2および可動子7を円筒状に形成した場合を例に挙げて説明した。しかし、これに限らず、例えば、横断面形状がI字状(平板状)や矩形状、H字状のリニアモータ等、横断面形状が円形以外のリニアモータにより構成してもよい。
【0078】
以上の実施の形態によれば、磁極位置の検出を非接触で行うことができ、しかも、コストを低減することができる電磁サスペンションを提供することができる。
【0079】
即ち、磁極位置検出手段を、磁石と、該磁石と第2部材の永久磁石との吸引反発力により生じる歪を検出する歪検出手段とから構成している。このため、歪検出手段が検出する歪の大きさ(大小)に基づいて、該歪と対応する永久磁石の磁極位置を非接触で検出することができる。しかも、磁極位置検出手段は、磁石と歪検出手段とにより簡素に構成できると共に、歪検出手段は、例えば磁気センサに比べて安価な歪センサを用いることができる。これにより、磁極位置検出手段のコストを低減することができる。
【符号の説明】
【0080】
1 電磁サスペンション
2 固定子
7 可動子
9 永久磁石
11,22,32,41 磁極位置検出装置(磁極位置検出手段)
13 磁極位置検出用磁石(磁石)
14 歪センサ(歪検出手段)
【技術分野】
【0001】
本発明は、例えば自動車、鉄道車両等の車両の振動を緩衝するのに好適に用いられる電磁サスペンションに関する。
【背景技術】
【0002】
一般に、自動車等の車両には、車体側と各車軸側との間に緩衝器が設けられている。このような緩衝器として、互いに相対直線運動可能に支持された固定子と可動子とからなるリニアモータを用いた電磁サスペンションが知られている(例えば、特許文献1参照)。
【0003】
この種の従来技術による電磁サスペンションでは、例えば3相リニア同期モータ等により構成されるリニアモータに通電する電流を、固定子と可動子との位置(ストローク位置)に応じて転流操作することで、電磁サスペンションの全可動域(全ストローク領域)で目標通りの推力(減衰力)を発生させるようにしている。
【0004】
この場合、転流操作とは、3相リニア同期モータの磁石磁束に対して電気角で90度進んだ位相に通電することをいう。そして、電磁サスペンションの全可動域で、90度の電流位相を保つためには、磁石磁束の位置(磁極位置)を検出する必要がある。
【0005】
一方、特許文献2には、リニアモータによって駆動される移動部(走行テーブル)の位置検出を、ロータリエンコーダを用いて行う構成が開示されている。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2010−127383号公報
【特許文献2】特開平9−22318号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
特許文献2による従来技術では、移動部の移動に伴ってロータリエンコーダをワイヤによって回転させる構成となっているため、ロータリエンコーダとワイヤとの摺動面が摩耗する虞がある。このような技術を電磁サスペンションに用いると、摺動面の耐久性を十分に確保できない虞がある。
【0008】
一方、電磁サスペンションの磁極位置の検出を、例えば磁気センサを用いて非接触で行うことが考えられる。ただし、磁気センサは高価であり、コストが嵩むという問題がある。
【0009】
本発明は、上述した従来技術の問題に鑑みなされたもので、本発明の目的は、磁極位置の検出を非接触で行うことができ、しかも、コストを低減することができる電磁サスペンションを提供することにある。
【課題を解決するための手段】
【0010】
上述した課題を解決するため、本発明は、互いに相対直線運動可能に支持された第1部材と第2部材とのうちの一方の部材を固定子とし、前記第1部材と第2部材とのうちの他方の部材を可動子としてなるリニアモータを用いた電磁サスペンションに適用される。
【0011】
そして、本発明が採用する構成の特徴は、前記第1部材は、永久磁石を含んで構成され、前記第2部材には、前記永久磁石の磁極位置を検出する磁極位置検出手段を設け、該磁極位置検出手段は、磁石と、前記永久磁石との吸引反発力により生じる歪を検出する歪検出手段とから構成したことにある。
【発明の効果】
【0012】
本発明によれば、磁極位置の検出を非接触で行うことができ、しかも、コストを低減することができる。
【図面の簡単な説明】
【0013】
【図1】本発明の第1の実施の形態による電磁サスペンションを示す縦断面図である。
【図2】図1中の矢示II−II方向からみた拡大断面図である。
【図3】磁極位置検出装置等を示す図1中の(III)部に相当する拡大断面図である。
【図4】電気角と歪との関係の一例を示す特性線図である。
【図5】本発明の第2の実施の形態による電磁サスペンションを示す縦断面図である。
【図6】磁極位置検出装置等を示す拡大斜視図である。
【図7】本発明の第3の実施の形態による電磁サスペンションを示す縦断面図である。
【図8】磁極位置検出装置等を示す図7中の(VIII)部に相当する拡大断面図である。
【図9】本発明の第4の実施の形態による電磁サスペンションを示す縦断面図である。
【図10】磁極位置検出装置等を示す拡大斜視図である。
【発明を実施するための形態】
【0014】
以下、本発明の実施の形態による電磁サスペンションを、添付図面に従って詳細に説明する。
【0015】
図1ないし図4は本発明の第1の実施の形態を示している。図において、電磁サスペンション1は、リニアモータを用いた電磁サスペンションであり、固定子2と、可動子7と、磁極位置検出装置11とにより大略構成されている。そして、固定子2(の電機子4)と可動子7(の永久磁石9)とにより、3相リニア同期モータを構成している。
【0016】
ここで、固定子2と可動子7とは、互いに相対直線運動可能に支持された第1部材と第2部材であって、本実施の形態の場合は、第1部材と第2部材とのうちの第1部材を可動子7とし、第2部材を固定子2とした場合を例示している。しかし、これに限らず、第1部材を固定子とし、第2部材を可動子としてもよい。
【0017】
本実施の形態で第2部材に相当する固定子2は、ケーシング3と電機子4とにより大略構成されている。ここで、ケーシング3は、例えば有底円筒状に形成されたもので、ストローク方向となる軸方向(図1の上,下方向)に延びる筒部3Aと、該筒部3Aの一端側(図1の上端側)を閉塞する底部3Bとにより構成されている。底部3Bには、例えば車両のばね上部材(例えば車体)に取付けられる取付アイ3Cが設けられている。一方、筒部3Aの開口端側(図1の下端側)には、電機子4が固定されている。
【0018】
電機子4は、例えば圧粉磁心や積層された電磁鋼板、磁性体片より切削加工等によって形成された略筒状のコア5と、所定の方向に巻かれてコア5内に収納された複数のコイル6A,6B,6Cとによって構成されている。ここで、コア5の他端側(図1の下端側)の開口端面には、後述する磁極位置検出装置11の被検出板12を取付けるための係合部5Aが設けられている。
【0019】
一方、各コイル6A,6B,6Cは、後述の可動子7(の永久磁石9)の外周面と対向して配置されている。例えば、図2に示すように、コイル6A,6B,6Cは、略筒状のコア5の内周面側に位置して該コア5の周方向に配置されると共に、図1に示すように、略筒状のコア5の軸方向の3箇所位置に軸方向に離間して配置されている。なお、コイル6A,6B,6Cの個数は、図示したものに限らず、設計仕様等に応じて適宜設定することができる。
【0020】
ここで、軸方向に隣合う3個のコイル6A,6B,6Cは、例えば電気角で120度ずつの位相差をもつように配置される。配線方法は、駆動電源側の電圧や電流仕様に応じて適宜選択することができる。
【0021】
本実施の形態で第1部材に相当する可動子7は、固定子2内で軸方向に延び、図示しない軸受等を介して該固定子2内にストローク方向(軸方向)の変位を可能に収容されている。ここで、可動子7は、ヨーク8と、複数の永久磁石9とにより大略構成されている。
【0022】
ヨーク8は、例えば磁性体を用いて有底円筒状に形成され、ストローク方向となる軸方向に延びる筒部8Aと、筒部8Aの他端側(図1の下端側)を閉塞する底部8Bとにより構成されている。底部8Bには、例えば車両のばね下部材(例えば車軸)に取付けられる取付アイ8Cが設けられている。
【0023】
ヨーク8の筒部8Aの外周面側には、複数の円環状の永久磁石9が軸方向に沿って並んで配置されている。この場合、図3に示すように、軸方向で隣合う各永久磁石9は、例えば互いに逆極性になっている。
【0024】
ところで、固定子2の各コイル6A,6B,6Cに電流を流すと、これら各コイル6A,6B,6Cに流れる電流と、可動子7の永久磁石9との間に電磁力が生じ、この電磁力によって電磁サスペンション1は推力(減衰力)を発生する。
【0025】
この電磁力を制御し、目標通りの推力を発生させるためには、コイル6A,6B,6Cが発生する電流磁束が永久磁石9の1/2個分、即ち、電気角で90度分だけ、永久磁石9の磁束に対してずれるように、U相コイル6A、V相コイル6B、W相コイル6Cに流れる電流値を制御する。
【0026】
各相に流す電流値の制御方法としては、可動子7が電気角で360度移動する間にU相コイル6A、V相コイル6B、W相コイル6Cに流れる電流の向きを12通りで切換えることで、電流磁束と各永久磁石9の磁束の位相差を、90±15度に保つ、120度通電方式と呼ばれる制御方法や、U相コイル6A、V相コイル6B、W相コイル6Cそれぞれの電流の向きと大きさからなるベクトルを合成し、合成したベクトルが各永久磁石9の磁束と位相差を90度に保つように各層の電流を制御するベクトル制御方式と呼ばれる制御方法が一般に知られている。
【0027】
このような120度通電方式やベクトル制御方式で電流値の制御を行う場合、電流磁束と各永久磁石9との位相差を90度に保つためには、永久磁石9の磁極位置を検出する必要がある。そこで、本実施の形態では、永久磁石9の磁極位置を検出する磁極位置検出手段としての磁極位置検出装置11を、第2部材に相当する固定子2に設けている。
【0028】
磁極位置検出装置11は、被検出部としての被検出板12と、磁石としての磁極位置検出用磁石13と、歪検出手段としての歪センサ14とにより大略構成され、固定子2を構成する電機子4の他端側(図1および図3の下端側)に設けられている。
【0029】
被検出板12は、例えば非磁性体により板状ないし柱状に形成されたもので、その基端側(図1および図3の上端側)は、電機子4のコア5の係合部5Aに固定されている。図示の例では、被検出板12の基端をコア5の係合部5Aに凹凸係合させることにより固定しているが、このような固定構造に限定するものではない。
【0030】
一方、被検出板12の先端側(図1および図3の下端側)には、磁極位置検出用磁石13が接着ないし埋め込み等の手段を用いて取付けられている。さらに、被検出板12の基端側には、歪センサ14が貼り付けられている。
【0031】
磁極位置検出用磁石13は、図3に示すように、被検出板12の先端側に、磁極(N極またはS極)が可動子7の永久磁石9と対向するように取付けられている。これにより、磁極位置検出用磁石13と可動子7の永久磁石9との間には、可動子7の外周面に対して直交する方向(図1および図3の左,右方向)の磁気的な吸引反発力が生じるように構成している。
【0032】
本実施の形態の場合は、磁極位置検出用磁石13のN極側を可動子7の永久磁石9に対向させている。これにより、磁極位置検出用磁石13と永久磁石9のS極とが対向した場合には、吸引力が生じ、磁極位置検出用磁石13と永久磁石9のN極とが対向した場合には、反発力が生じる。なお、磁極位置検出用磁石13の磁極は逆にすることもできる。即ち、磁極位置検出用磁石13のS極側を可動子7の永久磁石9に対向する構成としてもよい。
【0033】
何れにしても、磁極位置検出用磁石13と可動子7の永久磁石9との間の磁気的な吸引反発力は、可動子7が軸方向(図3の矢印Y方向)に永久磁石9の2個分移動する毎に、即ち、電気角で360度の周期で、正弦波状に変化する。このような吸引反発力により、被検出板12には、該被検出板12とコア5との係合部(接合部)を中心として、可動子7の永久磁石9に近付く方向ないし離れる方向のモーメントMが加わる。これにより、被検出板12には、吸引反発力の大きさに応じた曲げ歪が発生する。
【0034】
具体的には、図4に示すように、被検出板12の曲げ歪は、磁極位置検出用磁石13と可動子7の永久磁石9との間の吸引反発力の変化に従って、電気角360度周期で正弦波状に変化する。この場合、図3に示した角度は、図4の電気角度に対応する。本実施の形態の場合は、このような被検出板12の曲げ歪を後述の歪センサ14で検出することにより、この歪に対応する可動子7の永久磁石9の磁極位置を検出する(求める)構成となっている。
【0035】
歪センサ14は、磁極位置検出用磁石13と可動子7の永久磁石9との吸引反発力により被検出板12に生じる曲げ歪を検出するものである。ここで、歪センサ14は、例えばセンサ線を介してコントローラ(いずれも図示せず)に接続されている。歪センサ14の出力は、図4に示すように、電気角360度の周期で正弦波状に変化するため、例えばコントローラの演算器等で、歪センサ14の出力の規格化値を逆正弦関数に当てはめることで、永久磁石9の磁極位置を求めることができる。
【0036】
ここで、本実施の形態のよる歪検出手段としての歪センサ14について詳述する。本実施の形態に示す歪センサ14としては、従来から知られている歪ゲージの他、昨今開発された半導体歪ゲージを用いてもよい。
【0037】
まず、従来から知られている歪ゲージは、Cu−Ni系合金やNi−Cr系合金の金属薄膜の配線パターンを、可撓性のあるポリイミドやエポキシ樹脂フィルムで覆った構造であり、歪ゲージを被測定物に接着剤で接着して使用するもので、金属薄膜が歪を受けて変形したときの抵抗変化から、歪量を算出するものである。また、金属薄膜の歪ゲージでは、抵抗変化が小さいため、得られる電気信号を増幅する必要があり、そのため外部にアンプが必要となる。
【0038】
これに対し、半導体歪ゲージは、検知部を金属薄膜ではなく、シリコン等の半導体に不純物をドープして形成した半導体ピエゾ抵抗を利用したものである。半導体歪ゲージは、歪に対する抵抗変化率が金属薄膜を用いた従前の歪ゲージの数十倍と大きく、微小な歪、例えば、1με程度の歪を測定することが可能である。また、半導体歪ゲージは、抵抗変化が大きいため、得られた電気信号を外部のアンプを用いずに使用することもでき、さらには、半導体歪ゲージの数ミリ角のチップにアンプ回路や温度センサおよび温度補償回路、オフセット除去回路等を作りこむことも可能である。さらには、無線回路等を設けて、非接触でデータを取出すことも可能である。
【0039】
この半導体歪ゲージは、被測定物に接着剤や金属接合により固定することも可能であり、また、半導体歪ゲージを金属板に対し、スポット溶接により固定することも可能である。
【0040】
本実施の形態では、半導体歪ゲージを用いた方が歪量の測定精度が高く、取付スペースも少なくて済むので好ましいが、測定精度や取付スペースが許されれば、従来から知られている歪ゲージを用いてもよい。
【0041】
何れにしても、本実施の形態では、上述のような歪センサ14は、磁極位置検出装置11を構成する被検出板12の基端側に取付けられている。そして、歪センサ14は、磁極位置検出用磁石13と可動子7の永久磁石9との吸引反発力により生じる被検出板12の曲げ歪を検出することにより、この曲げ歪に対応する永久磁石9の磁極位置を磁極位置検出装置11で検出することができる。
【0042】
この場合、磁極位置検出装置11は、永久磁石9の磁極位置を、歪センサ14を用いて可動子7に対し非接触で検出することができる。このため、ロータリエンコーダ等を用いる従来技術のような、位置検出に伴って摩耗が生じることはなく、磁極位置検出装置11の耐久性を確保することができる。
【0043】
本実施の形態による電磁サスペンション1は、上述のような構成を有するもので、次にその作動について説明する。
【0044】
例えば、電磁サスペンション1を車両のばね下部材とばね上部材との間に介在させた場合は、車両が上,下方向に振動すると、電磁サスペンション1にはストローク方向(軸方向)に力が作用する。この力に応じて、可動子7と電機子4とが相対移動する。このとき、コイル6A,6B,6Cには、磁極位置検出装置11により検出される永久磁石9の磁極位置に応じて所定の電流を流すことにより、電磁サスペンション1の減衰力を調整することができ、車両の乗り心地や操縦安定性を向上させることができる。
【0045】
本実施の形態によれば、永久磁石9の磁極位置の検出を非接触で行うことができ、しかも、コストを低減することができる。
【0046】
即ち、磁極位置検出装置11を、磁極位置検出用磁石13と、該磁極位置検出用磁石13と可動子7の永久磁石9との吸引反発力に基づいて被検出板12に生じる歪を検出する歪センサ14とから構成している。このため、磁極位置検出装置11は、歪センサ14が検出する歪の大きさ(大小)に基づいて、該歪と対応する可動子7の永久磁石9の磁極位置を非接触で検出することができる。これにより、ロータリエンコーダ等を用いる従来技術のような、位置検出に伴って摩耗が生じることをなくすことができ、耐久性の確保を図ることができる。
【0047】
しかも、磁極位置検出装置11は、被検出板12と、磁極位置検出用磁石13と、歪センサ14とにより簡素に構成できると共に、例えば磁気センサ等と比較して安価な歪センサ14を用いることができる。このため、磁極位置検出装置11のコストを低減することができる。
【0048】
さらに、磁極位置検出装置11を構成する被検出板12は、非磁性体により形成しているので、磁極位置検出用磁石13と可動子7の永久磁石9との間の磁気的な吸引反発力を妨げることを抑制することができる。
【0049】
次に、図5および図6は本発明の第2の実施の形態を示している。本実施の形態の特徴は、磁極位置検出手段を、第2部材の軸方向中間部に設ける構成としたことにある。なお、本実施の形態では、上述した第1の実施の形態と同一の構成要素に同一の符号を付し、その説明を省略するものとする。
【0050】
固定子2は、ケーシング21と電機子4とにより大略構成されている。ここで、ケーシング21は、例えば有底円筒状に形成され、筒部21Aと、底部21Bとにより構成されている。底部21Bには、取付アイ21Cが設けられ、筒部21Aの開口端側(図5の下端側)には、電機子4が固定されている。
【0051】
ここで、筒部21Aの軸方向略中間部には、図6に示すように、略「コ」字状の切欠き(スリット)21Dが、筒部21Aの内周面と外周面との間を貫通するように形成されている。そして、この切欠き21Dにより囲まれた舌状の部位(舌片)を、磁極位置検出装置22の被検出部23としている。
【0052】
なお、このように被検出部23をケーシング21の筒部21Aに設けたことに伴って、固定子2を構成する電機子4のコア5の他端側(図5の下端側)の開口端面には、上述した第1の実施の形態のような係合部5Aは設けていない。
【0053】
永久磁石9の磁極位置を検出する磁極位置検出手段としての磁極位置検出装置22は、被検出部23と、磁石としての磁極位置検出用磁石13と、歪検出手段としての歪センサ14とにより大略構成され、固定子2を構成するケーシング21の軸方向略中間部に設けられている。
【0054】
被検出部23は、固定子2のケーシング21に切欠き21Dを形成することにより、略長方形状の舌片として片持ち支持状態でケーシング21に一体的に設けられている。そして、被検出部23の先端側(図5の下端側)には、磁極位置検出用磁石13が接着ないし埋め込み等の手段を用いて取付けられ、被検出部23の基端側(図5の上端側)には、歪センサ14が貼り付けられている。
【0055】
かくして、このように構成される第2の実施の形態においても、前述した第1の実施の形態とほぼ同様の作用効果を得ることができる。即ち、歪センサ14により、磁極位置検出用磁石13と可動子7の永久磁石9との吸引反発力により生じる被検出板12の曲げ歪を検出し、これにより、磁極位置検出装置22は、この曲げ歪に対応する永久磁石9の磁極位置を検出することができる。
【0056】
特に、本実施の形態によれば、磁極位置検出装置22の被検出部23を、ケーシング21に切欠き21Dを形成することにより該ケーシング21に一体に設ける構成としている。このため、第2部材を構成する部材と別体に被検出部を設ける構成に比べ、部品点数の低減を図ることができ、磁極位置検出装置22のコストのさらなる低減を図ることができる。
【0057】
次に、図7および図8は、本発明の第3の実施の形態を示している。本実施の形態の特徴は、磁極位置検出手段を第1部材の内側に位置するように構成したことにある。なお、本実施の形態では、上述した第1の実施の形態と同一の構成要素に同一の符号を付し、その説明を省略するものとする。
【0058】
固定子2は、ケーシング31と電機子4とにより大略構成されている。ここで、ケーシング31は、例えば有底円筒状に形成され、筒部31Aと、底部31Bとにより構成されている。底部31Bには、取付アイ31Cが設けられ、筒部31Aの開口端側(図7の下端側)には、電機子4が固定されている。また、底部31Bのうち取付アイ31Cとは反対側となる内側面は、後述する磁極位置検出装置32の被検出棒33を取付けるための係合部31Dが設けられている。
【0059】
なお、このようにケーシングの底部31Bに係合部31Dを設けたことに伴って、固定子2を構成する電機子4のコア5の他端側(図7の下端側)の開口端面には、上述した第1の実施の形態のような係合部5Aは設けていない。
【0060】
永久磁石9の磁極位置を検出する磁極位置検出手段としての磁極位置検出装置32は、被検出部としての被検出棒33と、磁石としての磁極位置検出用磁石13と、歪検出手段としての歪センサ14とにより大略構成され、筒状の可動子7の内側に配置されている。
【0061】
被検出棒33は、例えば非磁性体により円柱状ないし角柱状、長板状に形成され、可動子7を構成するヨーク8の内側に延びている。そして、被検出棒33の基端側(図7の上端側)は、ケーシング31の底部31Bの係合部31Dに固定されている。図示の例では、被検出棒33の基端を係合部31Dに凹凸係合させることにより固定しているが、このような固定構造に限定するものではない。
【0062】
一方、被検出棒33の先端側(図7の下端側)には、磁極位置検出用磁石13が接着ないし埋め込み等の手段を用いて取付けられている。さらに、被検出棒33の基端側には、歪センサ14が貼り付けられている。
【0063】
なお、可動子7を構成するヨーク8は、可動子7の永久磁石9と磁極位置検出用磁石13との間の磁気的な吸引反発力を妨げることを抑制するために、非磁性体により形成することが好ましい。
【0064】
かくして、このように構成される第3の実施の形態においても、前述した第1の実施の形態とほぼ同様の作用効果を得ることができる。即ち、歪センサ14により、磁極位置検出用磁石13と可動子7の永久磁石9との吸引反発力により生じる被検出棒33の曲げ歪を検出し、これにより、磁極位置検出装置32は、この曲げ歪に対応する永久磁石9の磁極位置を検出することができる。
【0065】
特に、本実施の形態によれば、磁極位置検出装置32を、固定子2の内側で、かつ、可動子7の内側、即ち、電磁サスペンション1の内部に配置する構成としているので、磁極位置検出装置32を固定子2および可動子7により保護することができる。
【0066】
次に、図9および図10は、本発明の第4の実施の形態を示している。本実施の形態の特徴は、磁極位置検出手段を構成する磁石と歪検出手段を第2部材に直接取付ける構成としたことにある。なお、本実施の形態では、上述した第1の実施の形態と同一の構成要素に同一の符号を付し、その説明を省略するものとする。
【0067】
永久磁石9の磁極位置を検出する磁極位置検出手段としての磁極位置検出装置41は、被検出部42と、磁石としての磁極位置検出用磁石13と、歪検出手段としての歪センサ14とにより大略構成され、固定子2を構成するケーシング3の軸方向略中間部に設けられている。
【0068】
ここで、本実施の形態の場合は、ケーシング3の筒部3Aに、上述の第2の実施の形態のような切欠き21Dは形成していない。そして、このように切欠き21Dが形成されていないケーシング3の筒部3Aの一部を、磁極位置検出装置41を構成する被検出部42とし、この筒部3Aに、磁極位置検出用磁石13を接着ないし埋め込み等の手段を用いて取付けると共に、該磁極位置検出用磁石13の近傍に、歪センサ14を貼り付けている。換言すれば、本実施の形態の場合は、ケーシング3の筒部3Aのうち磁極位置検出用磁石13と歪センサ14とを取付けた部位を、磁極位置検出装置41の被検出部42としている。
【0069】
なお、歪センサ14は、該歪センサ14の感度方向が筒部3Aの周方向と一致するように、該筒部3Aに取付けられている。これにより、リニアモータの推力、即ち、電機子4と永久磁石9との間に発生する推力(発生力)に基づく筒部3Aの歪(軸方向の歪)と、可動子7の永久磁石9と磁極位置検出用磁石13との間の磁気的な吸引反発力による歪(軸方向および周方向の歪)とのうち、磁気的な吸引反発力に依存する歪(周方向の歪)のみを選択して検出(計測)できるように構成している。
【0070】
また、本実施の形態の場合は、可動子7の永久磁石9と磁極位置検出用磁石13との間の磁気的な吸引反発力による被検出部42(筒部3A)の歪量が小さくなるため、高感度の歪センサ14を用いると共に、該歪センサ14の出力を補正する補正回路、例えば、増幅回路、ノイズ除去回路(ハイパスフィルタ、ローパスフィルタ等のバンドパスフィルタ)、温度補正回路等を設けることが好ましい。
【0071】
かくして、このように構成される第4の実施の形態においても、前述した第1の実施の形態とほぼ同様の作用効果を得ることができる。即ち、歪センサ14により、磁極位置検出用磁石13と可動子7の永久磁石9との吸引反発力により生じる被検出部42(筒部3A)の曲げ歪を検出し、これにより、磁極位置検出装置41は、この曲げ歪に対応する永久磁石9の磁極位置を検出することができる。
【0072】
特に、本実施の形態によれば、被検出部42をケーシング3の筒部3Aとし、この筒部3Aには、上述の第2の実施の形態のような切欠き21Dは形成していない。このため、磁極位置検出装置41をより簡素に構成することができ、さらなるコストの低減を図ることができる。
【0073】
なお、上述した各実施の形態では、互いに相対直線運動可能に支持された第1部材と第2部材とのうちの第1部材を可動子7とし、第2部材を固定子2とした場合を例に挙げて説明した。しかし、これに限らず、例えば、第1部材と第2部材とのうちの第1部材を固定子とし、第2部材を可動子としてもよい。
【0074】
上述した各実施の形態では、固定子2を車両のばね上部材(例えば車体)に取付けると共に、可動子7を車両のばね下部材(例えば車軸)に取付ける構成とした場合を例に挙げて説明した。しかし、これに限らず、例えば、固定子を車両のばね下部材に取付けると共に、可動子を車両のばね上部材に取付ける構成としてもよい。
【0075】
上述した各実施の形態では、電磁サスペンション1を縦置き状態で自動車等の車両に取付ける構成とした場合を例に挙げて説明したが、これに限らず、例えば、電磁サスペンションを横置き状態で鉄道車両等の車両に取付ける構成としてもよい。
【0076】
上述した各実施の形態では、電磁サスペンション1を車両に取付ける構成とした場合を例に挙げて説明したが、これに限らず、例えば、振動源となる種々の機械、建築物等に用いる電磁サスペンションに用いてもよい。
【0077】
さらに、上述した各実施の形態では、横断面形状が円形のリニアモータ、即ち、固定子2および可動子7を円筒状に形成した場合を例に挙げて説明した。しかし、これに限らず、例えば、横断面形状がI字状(平板状)や矩形状、H字状のリニアモータ等、横断面形状が円形以外のリニアモータにより構成してもよい。
【0078】
以上の実施の形態によれば、磁極位置の検出を非接触で行うことができ、しかも、コストを低減することができる電磁サスペンションを提供することができる。
【0079】
即ち、磁極位置検出手段を、磁石と、該磁石と第2部材の永久磁石との吸引反発力により生じる歪を検出する歪検出手段とから構成している。このため、歪検出手段が検出する歪の大きさ(大小)に基づいて、該歪と対応する永久磁石の磁極位置を非接触で検出することができる。しかも、磁極位置検出手段は、磁石と歪検出手段とにより簡素に構成できると共に、歪検出手段は、例えば磁気センサに比べて安価な歪センサを用いることができる。これにより、磁極位置検出手段のコストを低減することができる。
【符号の説明】
【0080】
1 電磁サスペンション
2 固定子
7 可動子
9 永久磁石
11,22,32,41 磁極位置検出装置(磁極位置検出手段)
13 磁極位置検出用磁石(磁石)
14 歪センサ(歪検出手段)
【特許請求の範囲】
【請求項1】
互いに相対直線運動可能に支持された第1部材と第2部材とのうちの一方の部材を固定子とし、前記第1部材と第2部材とのうちの他方の部材を可動子としてなるリニアモータを用いた電磁サスペンションであって、
前記第1部材は、永久磁石を含んで構成され、
前記第2部材には、前記永久磁石の磁極位置を検出する磁極位置検出手段を設け、
該磁極位置検出手段は、磁石と、前記永久磁石との吸引反発力により生じる歪を検出する歪検出手段とから構成したことを特徴とする電磁サスペンション。
【請求項1】
互いに相対直線運動可能に支持された第1部材と第2部材とのうちの一方の部材を固定子とし、前記第1部材と第2部材とのうちの他方の部材を可動子としてなるリニアモータを用いた電磁サスペンションであって、
前記第1部材は、永久磁石を含んで構成され、
前記第2部材には、前記永久磁石の磁極位置を検出する磁極位置検出手段を設け、
該磁極位置検出手段は、磁石と、前記永久磁石との吸引反発力により生じる歪を検出する歪検出手段とから構成したことを特徴とする電磁サスペンション。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2013−50172(P2013−50172A)
【公開日】平成25年3月14日(2013.3.14)
【国際特許分類】
【出願番号】特願2011−188682(P2011−188682)
【出願日】平成23年8月31日(2011.8.31)
【出願人】(509186579)日立オートモティブシステムズ株式会社 (2,205)
【Fターム(参考)】
【公開日】平成25年3月14日(2013.3.14)
【国際特許分類】
【出願日】平成23年8月31日(2011.8.31)
【出願人】(509186579)日立オートモティブシステムズ株式会社 (2,205)
【Fターム(参考)】
[ Back to top ]