
電磁制御装置
【課題】 低消費電力の電磁制御装置を提供する。
【解決手段】 TCU3は、電磁駆動部10への通電を制御することにより電磁力の大きさを制御する。移動規制部30は、規制位置の他端側の位置である基準位置から一端側へ第1所定距離離れた第1位置を超えてシャフト13およびスプール22が一端側へ変位すると、規制位置から基準位置側への移動体の移動を規制する。その後、移動規制部30は、基準位置から一端側へ第2所定距離離れた第2位置を超えてシャフト13およびスプール22が一端側へ変位すると、基準位置側へシャフト13およびスプール22が戻ることを可能にする。また、TCU3は、シャフト13およびスプール22が第1位置を超えて変位した後、第2位置まで変位する間、電磁駆動部10に通電する通電量を低減させる。
【解決手段】 TCU3は、電磁駆動部10への通電を制御することにより電磁力の大きさを制御する。移動規制部30は、規制位置の他端側の位置である基準位置から一端側へ第1所定距離離れた第1位置を超えてシャフト13およびスプール22が一端側へ変位すると、規制位置から基準位置側への移動体の移動を規制する。その後、移動規制部30は、基準位置から一端側へ第2所定距離離れた第2位置を超えてシャフト13およびスプール22が一端側へ変位すると、基準位置側へシャフト13およびスプール22が戻ることを可能にする。また、TCU3は、シャフト13およびスプール22が第1位置を超えて変位した後、第2位置まで変位する間、電磁駆動部10に通電する通電量を低減させる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、電磁制御装置に関する。
【背景技術】
【0002】
従来、自動変速機の複数の摩擦要素の係合または開放を油圧で制御する電磁制御装置が公知である。この電磁制御装置は、筒状のスリーブ、スリーブの内壁に沿って往復移動可能なスプール、および、スプールを移動させる電磁駆動部を有する電磁制御弁を複数備える。電磁制御装置は複数の電磁制御弁を駆動することにより、複数の摩擦要素の係合または開放に関わる油圧を出力する。電磁制御装置はスプールの往復移動を制御することで出力油圧を制御する。
【0003】
ところで、このような構成は、変速段が長時間変化しない、例えば高速巡航走行などの定常走行状態であっても、電磁制御弁の出力油圧を維持するために一部の電磁駆動部への通電を維持する必要が有る。特許文献1に記載の発明では、通電されていないとき低圧の油圧を出力するいわゆるノーマルロータイプの電磁制御弁を適用することで定常走行状態での消費電力の低減を図っている。また、特許文献2に記載の発明では、永久磁石を用いたロック機構をさらに備える。このロック機構により、往復移動するスプールを所定位置に規制することで、電磁制御弁に通電されていない状態であっても電磁制御弁の出力油圧を所定油圧に維持しようとしている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2010−84855号公報
【特許文献2】特開2010−151264号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、特許文献1に記載の発明では、依然として一部の電磁駆動手段への通電が必要であるばかりか、複数の摩擦要素の係合または開放の組み合わせが変わった場合、消費電力を十分に低減することができないおそれがある。
また、特許文献2に記載の発明の場合、追加の磁石やコイル、さらに位置規制解除専用の通電制御回路などの部品の追加により装置全体の体格が大きくなったりコストが増加するおそれがある。
【0006】
本発明は上記の問題に鑑みてなされたものであり、その目的は、低消費電力の電磁制御装置を、小型の体格でかつ低コストで提供することにある。
【課題を解決するための手段】
【0007】
請求項1に記載の発明では、電磁制御装置は、固定体、移動体、付勢手段、推力発生手段、移動規制手段、および、制御手段を備える。固定体は例えば他部材に固定されている。移動体は、固定体に対し相対移動可能に設けられる。付勢手段は、移動体の一端に当接するよう固定体に設けられ、移動体を他端側に付勢する。推力発生手段は、通電により電磁力を発生する電磁力発生手段を有し、電磁力発生手段の発生する電磁力に応じて移動体を固定体に対し相対移動させる推力を発生する。移動規制手段は、固定体の所定の位置である規制位置から他端側への移動体の移動を規制可能である。制御手段は、電磁力発生手段への通電を制御することにより電磁力の大きさを制御する。ここで、移動規制手段は、規制位置の他端側の位置である基準位置から一端側へ第1所定距離離れた第1位置を超えて移動体が一端側へ変位すると、規制位置から基準位置側への移動体の移動を規制する。その後、移動規制手段は、基準位置から一端側へ第2所定距離離れた第2位置を超えて移動体が一端側へ変位すると、基準位置側へ移動体が戻ることを可能にする。また、制御手段は、移動体が第1位置を超えて変位した後、第2位置まで変位する間、電磁力発生手段に通電する通電量を低減させる。
本発明では、移動規制手段を備えるため、移動体が所定位置に位置するよう移動体の移動を規制することができる。これにより、所定位置に移動体を維持させる推力を維持するために、電磁力発生手段への通電を継続する必要がなくなる。よって、電磁制御装置の消費電力を低減することができる。
【0008】
請求項2は推力発生手段をより具体的に示した例である。請求項2に記載の発明では、推力発生手段は、電磁力発生手段の発生する電磁力に応じて圧力を出力し、当該圧力により移動体を固定体に対して相対移動させる。
【0009】
請求項3は移動規制手段をより具体的に示した例である。請求項3に記載の発明では、移動規制手段は、カム溝部および突出ピンを有する。ここで、カム溝部は、固定体に形成され、ハート形状である。突出ピンは、端部がカム溝部に入り込み可能かつ摺動可能となるよう移動体から突出する。すなわち、移動規制手段は、ハートカム機構により構成されている。
本発明では、簡単なハートカム機構で移動規制手段を構成することにより、移動規制手段を簡単かつ小型にすることができるため、電磁制御装置を簡単かつ小型にすることができる。
【0010】
請求項4に記載の発明では、カム溝部は、基準位置、第1位置、規制位置、および第2位置の間で深さが変化するよう形成されている。
請求項5に記載の発明では、第1所定距離は第2所定距離より短い。
【0011】
請求項6は移動規制手段をより具体的に示した例である。請求項6に記載の発明では、固定体は円筒状に形成されている。また、移動規制手段は、第1凹凸部、長溝、第1中間体、および、第2中間体を有する。第1凹凸部は、固定体の内壁から径内方向に突出し、一端側が鋸歯状に形成される。長溝は、第1凹凸部の所定の凹部に対応し軸方向に延びるよう形成される。第1中間体は、円筒状であり、長溝に入り込み可能かつ摺動可能に外壁から突出する第1突起、および、一端側の端部に鋸歯状に形成される第2凹凸部を有する。また、第1中間体は電磁力発生手段の発生する電磁力に応じて一端側へ移動する。第2中間体は、円筒状であり、第1凹凸部と当接可能かつ長溝に入り込み可能に外壁から突出する第2突起、および、他端側の端部に形成され第2凹凸部と噛み合い可能な第3凹凸部を有する。また、第2中間体は、第1中間体により一端側へ付勢されることにより移動体を一端側へ付勢する。すなわち、移動規制手段は、ノック機構により構成されている。 本発明では、簡単なノック機構で移動規制手段を構成することにより、移動規制手段を簡単かつ小型にすることができるため、電磁制御装置を簡単かつ小型にすることができる。
請求項7に記載の発明では、第1所定距離と第2所定距離とは同一である。
【0012】
請求項8は電磁制御装置をより具体的に示した例である。請求項8に記載の発明では、電磁制御装置は、固定体と移動体との相対移動により油路を切り替えることで、自動変速機の摩擦要素の油圧を制御する電磁油圧制御弁を有する。
請求項9は電磁油圧制御弁をより具体的に示した例である。請求項9に記載の発明では、電磁油圧制御弁は二位置切替弁である。
請求項10は電磁油圧制御弁をより具体的に示した例である。請求項10に記載の発明では、電磁油圧制御弁は比例油圧制御弁である。
【0013】
請求項11に記載の発明では、制御手段は、移動体が規制位置に位置するとき、電磁力発生手段への通電を完全に遮断することを特徴とする。
本発明では、電磁力発生手段への通電を完全に遮断することにより、電磁制御装置の消費電力をさらに低減することができる。
【0014】
請求項12に記載の発明では、制御手段は、電磁力発生手段に通電する電流値を制御することにより、第1位置を超えて移動体を変位させることによって規制位置から基準位置への移動体の移動が規制されるよう制御する。
また、請求項13に記載の発明では、制御手段は、電磁力発生手段に通電される電流値を制御することにより、第2位置を超えるよう移動体を変位させることによって、移動体が基準位置に戻ることが可能なよう制御する。
これにより、電磁力発生手段に通電する電流を制御することにより、固定体に対する移動体の移動の規制状態を制御することができる。
【0015】
請求項14に記載の発明では、制御手段は、比例油圧制御弁に供給する油圧を制御することにより、第1位置を超えて移動体を変位させることによって規制位置から基準位置への移動体の移動が規制されるよう制御する。
請求項15に記載の発明では、制御手段は、比例油圧制御弁に供給する油圧を制御することにより、第2位置を超えるよう移動体を変位させることによって、移動体が基準位置に戻ることが可能なよう制御する。
これにより、比例油圧制御弁に供給する油圧を制御することにより、固定体に対する移動体の移動の規制状態を制御することができる。
【0016】
請求項16に記載の発明では、電磁制御装置は電磁油圧制御弁の出力油圧を検出する油圧検出手段をさらに備える。また、制御手段は、移動規制手段により移動体の移動が規制されていると想定される状態において、電磁力発生手段に通電する通電量を低減するときに油圧検出手段により検出された油圧が所定油圧を下回った場合に、電磁力発生手段に通電する通電量の低減を停止する。
これにより、移動規制手段が異常となった場合であっても、移動体を所定位置に維持させることができる。
【図面の簡単な説明】
【0017】
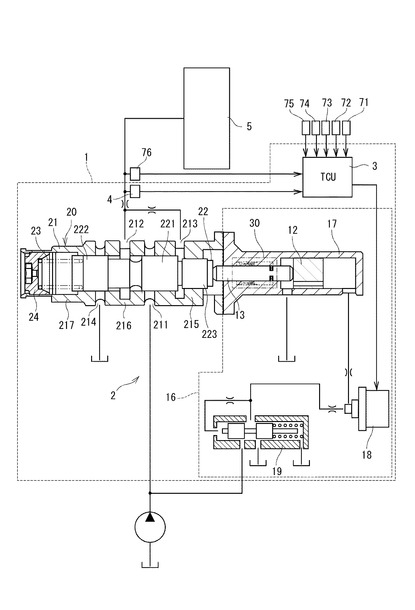
【図1】本発明の第1実施形態による電磁制御装置を示す模式図である。
【図2】本発明の第1実施形態による電磁制御装置の位置制限部を示す模式図である。
【図3】移動規制部のカム溝部を示す模式図であり、(A)は図2のIII方向視平面図であり、(B)は第1溝の位置P0と位置P12との間の断面図であり、(C)は第2溝の位置P13と位置P14との間の断面図であり、(D)は第3溝の位置P15と位置P16との間の断面図であり、(E)は第4溝の位置P17と位置P18との間の断面図である。
【図4】本発明の第1実施形態による電磁制御装置の特性図である。
【図5】本発明の第2実施形態による電磁制御装置の移動規制部を示す模式図である。
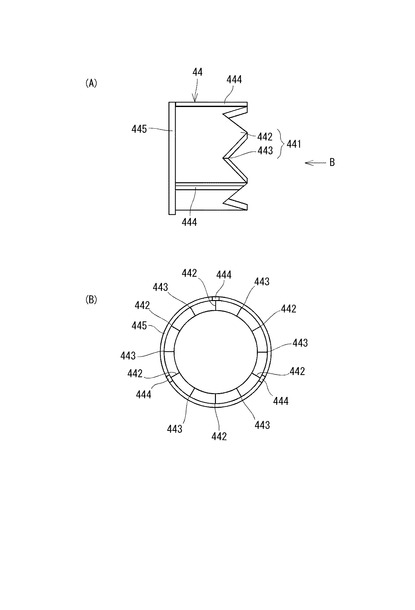
【図6】本発明の第2実施形態による電磁制御装置の移動規制部の第1凹凸部を示す模式図であり、(A)は断面図であり、(B)は(A)のB方向視平面図である。
【図7】本発明の第2実施形態による電磁制御装置の移動規制部の第1中間体を示す模式図であり、(A)は側面図であり、(B)は(A)のB方向視平面図である。
【図8】本発明の第2実施形態による電磁制御装置の移動規制部の第2中間体を示す模式図であり、(A)は側面図であり、(B)は(A)のB方向視平面図である。
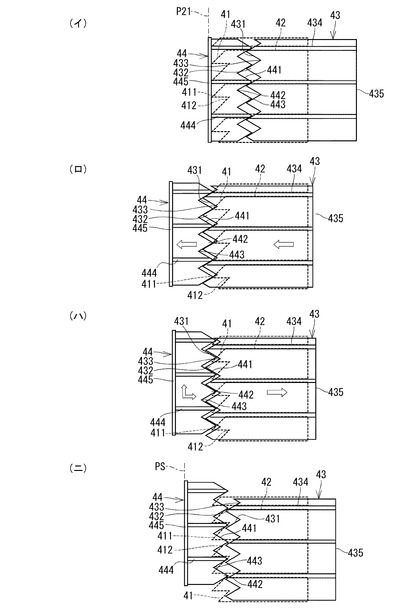
【図9】本発明の第2実施形態による電磁制御装置の移動規制部の作動を示す模式図である。
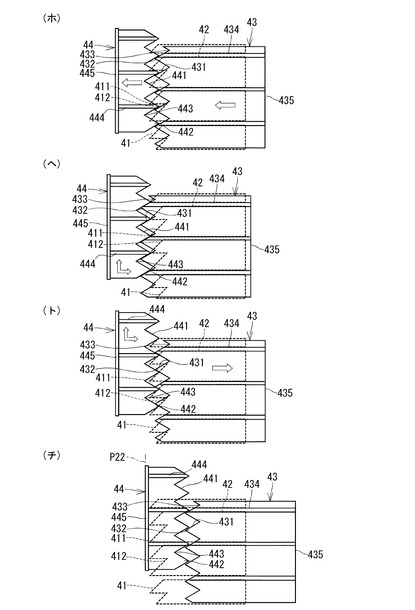
【図10】本発明の第2実施形態による電磁制御装置の移動規制部の作動を示す模式図である。
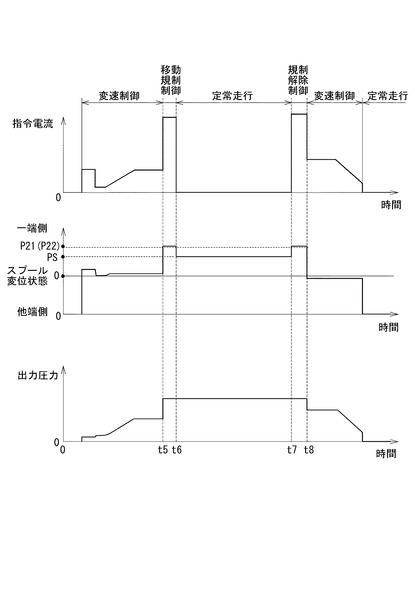
【図11】本発明の第2実施形態による電磁制御装置の特性図である。
【図12】本発明の第3実施形態による電磁制御装置を示す模式図である。
【発明を実施するための形態】
【0018】
以下、本発明の実施形態による電磁制御装置を図面に基づいて説明する。
(第1実施形態)
本発明の第1実施形態による電磁制御装置を図1〜図4に示す。
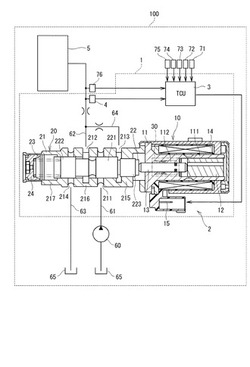
本発明の電磁制御装置は、例えば自動車の自動変速機の油圧制御システムに適用される電磁油圧制御装置である。図1に示すように、電磁油圧制御装置1は、自動変速機100とともに車両に搭載され、自動変速機100を制御する。図1に示す自動変速機100は、いわゆる多段自動変速機であり、複数の歯車を使用して力を伝え変速比を段階的に変化させる。自動変速機100には、電磁油圧制御装置1から供給される作動油の出力油圧に応じて作動する摩擦要素としての複数のクラッチ5が設けられている。図1では、便宜上、1つのクラッチ5のみを示している。
【0019】
電磁油圧制御装置1は、電磁油圧制御弁2、制御手段としてのトランスミッションコントロールユニット(以下、トランスミッションコントロールユニットを「TCU」という)3、および、油圧センサ4を備える。ここで、電磁油圧制御弁2は、複数のクラッチ5にそれぞれ対応するように複数設けられる。また、TCU3は、複数の電磁油圧制御弁2と電気的に接続される。図1では、便宜上、1つの電磁油圧制御弁2のみを示している。
【0020】
電磁油圧制御弁2は、クラッチ5へ出力される作動油の出力油圧を制御する二位置切替弁である。
電磁油圧制御弁2は、推力発生手段としての電磁駆動部10、調圧部20、および、移動規制手段としての移動規制部30を有する。調圧部20は、電磁駆動部10により駆動され、出力油圧を調整する。調圧部20は、流路61を経由してポンプ60に接続され、流路62を経由してクラッチ5と接続されている。また、調圧部20は、流路63を経由してオイルパン65に接続されている。
【0021】
ポンプ60は、オイルパン65に蓄えられている作動油を吸引および加圧し、所定のライン圧に調整して、流路61を経由して調圧部20に供給する。油圧供給源としてのポンプ60から供給された作動油は、調圧部20にて目標の出力油圧に調整され、流路62を経由してクラッチ5に供給される。調圧部20にて油圧を調整する際に発生する余剰油は、流路63を経由してオイルパン65に戻される。
【0022】
電磁駆動部10は、調圧部20における油圧の調圧動作を制御する。電磁駆動部10は、TCU3から指令電流値に基づく駆動電流が供給され、電磁吸引力を発生する。調圧部20は、電磁駆動部10が発生する電磁吸引力によって制御される。
【0023】
TCU3は、マイクロコンピュータおよび駆動回路等から構成され、変速制御処理を実行する。TCU3には、変速制御処理を実行する上で必要な各種運転情報を取得するためのスロットル開度センサ71、エンジン回転数センサ72、タービン回転数センサ73、レンジセンサ74、車速センサ75、油温センサ76、および油圧センサ4等が接続されている。油圧センサ4は、流路62を流れる作動油の油圧を検出する。
【0024】
TCU3内に設けられるマイクロコンピュータは、メモリに記憶された種々の制御プログラムを実行することにより、目標出力油圧値を算出し、さらに、指令電流値を算出する。駆動回路は、算出された指令電流値に基づき電磁駆動部10を駆動するための駆動電流を発生する。
【0025】
電磁駆動部10は、リニアソレノイドであり、ステータ11、プランジャ12、シャフト13、および、コイル14等を有する。
ステータ11は鉄等の磁性材料で筒状に形成されており、収容部111および吸引部112を有している。収容部111は、プランジャ12を径方向内側に収容している。吸引部112は、収容部111に対して調圧部20側に設けられており、プランジャ12を吸引する電磁吸引力をプランジャ12との間に発生する。
プランジャ12は、鉄等の磁性材料で柱状に形成され、収容部111内に軸方向に往復移動可能に収容される。シャフト13は、プランジャ12の調圧部20側において、吸引部112の内側を往復移動可能に設けられている。
【0026】
コイル14は、収容部111の径方向外側に設置されている。TCU3からの指令電流は、ターミナル15を経由してコイル14に供給される。コイル14に指令電流が供給されると、指令電流に応じた磁束が発生する。磁束はステータ11およびプランジャ12を通過し、吸引部112とプランジャ12との間に電磁吸引力が発生する。そして、プランジャ12は、シャフト13とともに調圧部20側に移動する。
【0027】
調圧部20は、いわゆるスプール弁であり、スリーブ21、スプール22、付勢手段としてのスプリング23等から構成される。
スリーブ21は、ステータ11と同軸上に筒状に形成されている。スリーブ21は、径方向の外側と内側とを連通する複数の流体ポートとしての入力ポート211、出力ポート212、フィードバックポート213、および排出ポート214を有する。スリーブ21の電磁駆動部10と反対側の端部には、調整ねじ24が設けられている。
【0028】
入力ポート211には、流路61が接続され、所定のライン圧に調整された作動油がポンプ60から供給される。排出ポート214は、流路63を経由して出力油圧に調整する際に発生する余剰油をオイルパン65に排出する。
出力ポート212には、流路62が接続され、出力油圧に調整された作動油をクラッチ5に出力する。フィードバックポート213には、流路62から分岐した流路64が接続され、出力ポート212から出力された作動油の一部がスリーブ21の内側に戻される。
【0029】
スプール22は、スリーブ21の径方向内側に、軸方向に往復移動可能に収容される。以下、スプール22の電磁駆動部10(図1の左側)との反対側を「一端側」といい、スプール22の電磁駆動部10側(図1の右側)を「他端側」という。
スプール22は、電磁駆動部10のシャフト13に当接する側からフィードバックランド223、入力ランド221、排出ランド222をこの順に設けている。
ここで、スプール22およびシャフト13は特許請求の範囲における「移動体」に対応し、スリーブ21およびステータ11は「固定体」に対応する。
【0030】
スプリング23は、一端が調整ねじ24に当接し、他端がスプール22の一端側の端面に当接するよう設けられている。スプリング23は、スプール22、シャフト13およびプランジャ12を他端側に付勢している。これにより、電磁駆動部10への通電または非通電によって、スプール22とプランジャ12とは一体に往復移動する。スリーブ21に対するスプール22の往復移動により、スリーブ21とスプール22との間の相対位置が変化すると、調圧部20の出力油圧が変化する。本実施形態の場合、スプール22は、移動規制部30によりスリーブ21の所定位置で移動が規制される。
【0031】
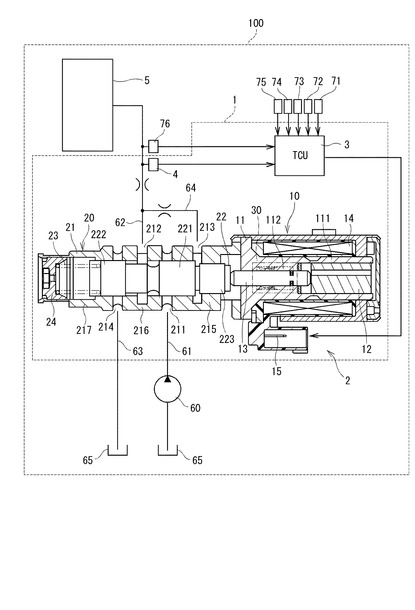
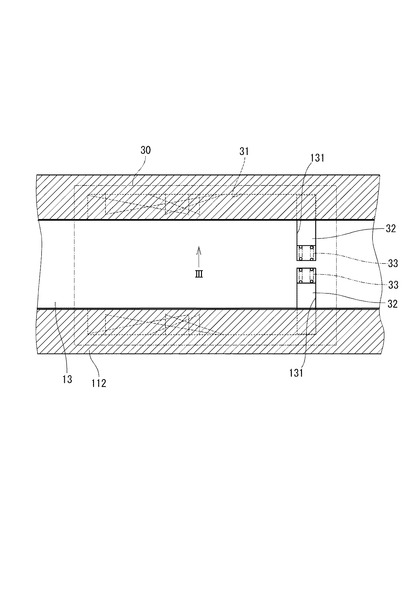
移動規制部30は、シャフト13に設けられ、スリーブ21の所定位置でスプール22の移動を規制可能である。ここで、図2および図3に基づいて、移動規制部30について詳細に説明する。図2は移動規制部30を拡大して示した断面図であり、図3は図2のIII方向から見た平面図である。
移動規制部30は、図2に示すように、カム溝部31および突出ピン32を有する。
カム溝部31は、吸引部112の内壁に、図2のIII方向視ハート形状に形成されている(図3参照)。
【0032】
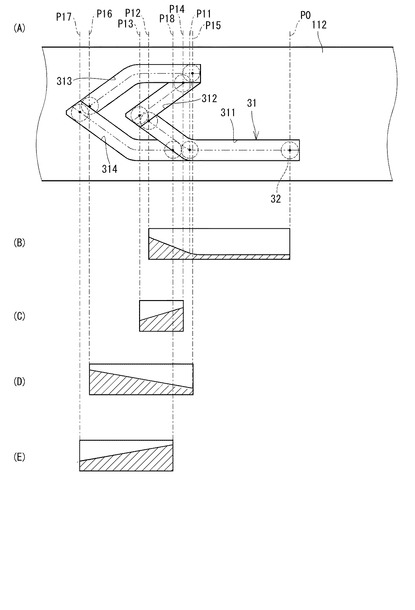
また、図3に示すように、カム溝部31は、第1溝311、第2溝312、第3溝313、および第4溝314を有する。第1溝311、第2溝312、第3溝313、および第4溝314は、この順で連通され、位置により深さが異なるよう形成されている。
第1溝311は、位置P0および位置P11が位置P12より深くなるよう形成され、位置P11と位置P12との間の深さが徐々に変化するよう形成される(図3(B)参照)。第2溝312は、位置P13が位置P14より深くなるよう形成され、位置P13と位置P14との間の深さが徐々に変化するよう形成される(図3(C)参照)。第3溝313は、位置P15が位置P16より深くなるよう形成され、位置P15と位置P16との間の深さが徐々に変化するよう形成される(図3(D)参照)。第4溝314は、位置P17が位置P18より深くなるよう形成され、位置P17と位置P18との間の深さが徐々に変化するよう形成される(図3(E)参照)。
【0033】
突出ピン32は、図2に示すように、シャフト13の外壁から吸引部112の内壁側に突出するよう、シャフト13の収容凹部131に設けられている。突出ピン32とシャフト13との間にはスプリング132が設けられている。突出ピン32は、スプリング132の付勢力により、カム溝部31に入り込み可能であり、吸引部112の内壁側の端部がカム溝部31の底部と摺動可能である。
【0034】
ここで、本実施形態の電磁油圧制御弁2の移動規制部30の作動について図3に基づいて説明する。
電磁駆動部10に通電されていないとき、スプール22およびシャフト13はスプリング23の付勢力により他端側に付勢され、突出ピン32は位置P0に位置する。ここで、突出ピン32が位置P0に位置するときのシャフト13の位置は、特許請求の範囲における「基準位置」に対応する。
【0035】
電磁駆動部10に通電されると、吸引部112とプランジャ12との間に電磁吸引力が発生する。この電磁吸引力により、プランジャ12は、吸引部112に吸引され、シャフト13およびスプール22を一端側に押す。シャフト13およびスプール22は、プランジャ12の推力によりスプリング23の付勢力に抗して一端側に移動する。
【0036】
また、シャフト13の移動により、位置P0に位置する突出ピン32は、カム溝部31に沿って移動し始める。ここで、突出ピン32は、位置P12を超えて位置P13まで変位し第1溝311から第2溝312に入ると、位置P12と位置P13との間の段差により、第2溝312から第1溝311に戻ることができなくなる。よって、電磁駆動部10に通電する通電量を低減しても、突出ピン32は、第2溝312から第1溝311に戻らない。ここで、突出ピン32が位置P12に位置するときの吸引部111におけるシャフト13の位置は、特許請求の範囲における「第1位置」に対応する。また、位置P0と位置P12との間の距離は、特許請求の範囲における「第1所定距離」に対応する。
【0037】
本実施形態の場合、突出ピン32が位置P12を超えて変位したとき、電磁駆動部10への通電を完全に停止する。このとき、吸引部112とプランジャ12との間の電磁吸引力が消滅され、スプール22、シャフト13、および、プランジャ12は、スプリング23の付勢力により他端側へ移動する。突出ピン32は、第2溝312から第1溝311に戻ることができないため、位置P13から位置P14へ移動する。突出ピン32は、位置P14を超えて位置P15まで変位し第2溝312から第3溝313に入ると、位置P15と位置P14との間の段差により、第3溝313から第2溝312に戻ることができなくなる。また、突出ピン32は、第3溝313の他端側の側壁に係止されることにより、他端側へ移動することができなくなる。よって、突出ピン32の他端側への移動が規制され、シャフト13およびスプール22の他端側への移動が規制される。ここで、突出ピン32が位置P15に位置するときの吸引部111におけるシャフト13の位置は、特許請求の範囲における「規制位置」に対応する。
【0038】
ここで、再び電磁駆動部10に通電すると、プランジャ12の推力により、シャフト13およびスプール22は一端側へ移動する。ここで、突出ピン32は、第3溝313から第2溝312に戻ることができないため、位置P15から位置P16へ移動する。突出ピン32は、位置P16を超えて位置P17まで変位し第3溝313から第4溝314に入ると、位置P16と位置P17との間の段差により、第4溝314から第3溝313に戻ることができなくなる。よって、電磁駆動部10に通電する通電量を低減しても、突出ピン32は、第4溝314から第3溝313に戻らない。突出ピン32が位置P16に位置するときの吸引部111におけるシャフト13の位置は、特許請求の範囲における「第2位置」に対応する。また、位置P0と位置P16との間の距離は、特許請求の範囲における「第2所定距離」に対応する。ここで、カム溝部31は、位置P0と位置P16との間の距離が位置P0と位置P12との間の距離より長くなるよう形成されている。
【0039】
本実施形態の場合、突出ピン32が位置P16を超えて変位したとき、電磁駆動部10への通電を低減または停止する。このとき、吸引部112とプランジャ12との間の電磁吸引力が消滅され、スプール22、シャフト13、および、プランジャ12は、スプリング23の付勢力により他端側へ移動する。ここで、突出ピン32は、第4溝314から第3溝313に戻ることができないため、位置P17から位置P18へ移動する。よって、スプール22およびシャフト13はスプリング23の付勢力により他端側へ移動し、突出ピン32は位置P0に戻ることが可能になる。
【0040】
図4は、車両走行時の変速制御を行うときの時間に伴う指令電流の変化、突出ピン32の位置の変化、および、電磁油圧制御弁2の出力圧力の変化を示す。図4に示すように、時刻t1で電磁駆動部10に流れる指令電流の通電量を増加すると、突出ピン32は位置P12を超えて変位する。時刻t2で電磁駆動部10に流れる指令電流を完全に停止すると、突出ピン32は位置P15に係止される。これにより、スプール22が所定位置に位置することにより、調圧部20の出力圧力は所定値を維持することができる。また、時刻t3で電磁駆動部10に流れる指令電流の通電量を増加すると、突出ピン32は位置P16を超えて変位する。時刻t4で電磁駆動部10に流れる指令電流を低減すると、突出ピン32は位置P0に戻ることが可能になる。ここで、本実施形態の場合、移動規制制御を行う時刻t1と時刻t2との間および規制解除制御を行う時刻t3と時刻t4との間では電力が消費されているが、定常走行する時刻t2と時刻t3との間では電力が消費されていない。
【0041】
上述したように、本実施形態では、シャフト13に設けられている突出ピン32および吸引部112に形成されているカム溝部31により、シャフト13およびスプール22が所定位置に位置するようシャフト13およびスプール22の移動を規制することができる。これにより、シャフト13およびスプール22を所定位置に保持する推力を維持するために、電磁駆動部10への通電を継続する必要がなくなる。よって、電磁油圧制御装置1の消費電力を低減することができる。
【0042】
また、本実施形態では、簡単な構成で、シャフト13およびスプール22を所定位置に規制することができるため、電磁油圧制御装置1の小型化に貢献することができる。
【0043】
(第2実施形態)
本発明の第2実施形態の自動変速機の電磁制御装置の移動規制部を図5〜図11に示す。なお、第1実施形態と実質的に同一の部位には同一の符号を付し、説明を省略する。
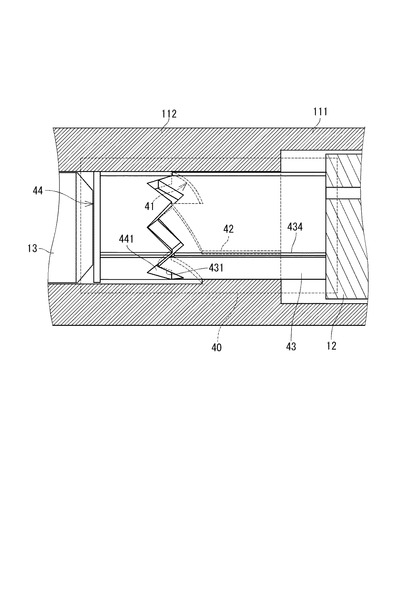
本実施形態では、移動規制部40は、図5に示すように、シャフト13とプランジャ12との間に設けられ、第1凹凸部41、長溝42、第1中間体43、および第2中間体44を有する。
【0044】
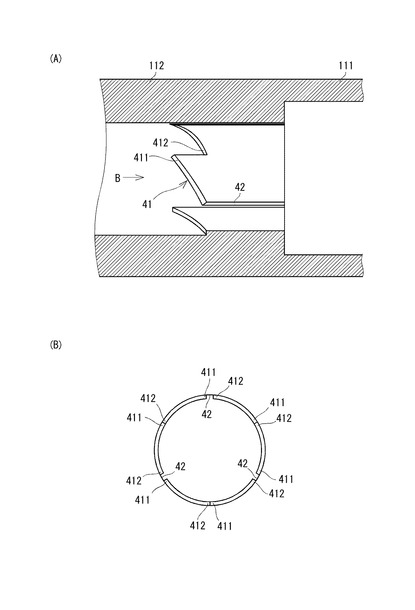
図6(A)に示すように、第1凹凸部41は、吸引部112の内壁から径内方向に突出するよう形成されている。また、第1凹凸部41は、一端側が鋸歯状に形成され、凸部411および凹部412を有する。凸部411および凹部412は、図6(B)に示すように、吸引部112の内壁の周方向に交互に並ぶよう形成されている。
【0045】
長溝42は、所定の凹部412に対応し軸方向に延びるよう形成されている。ここで、長溝42に対応している凹部412と、長溝42に対応していない凹部412とは、吸引部112の内壁の周方向に交互に配置されている(図6(B)参照)。
【0046】
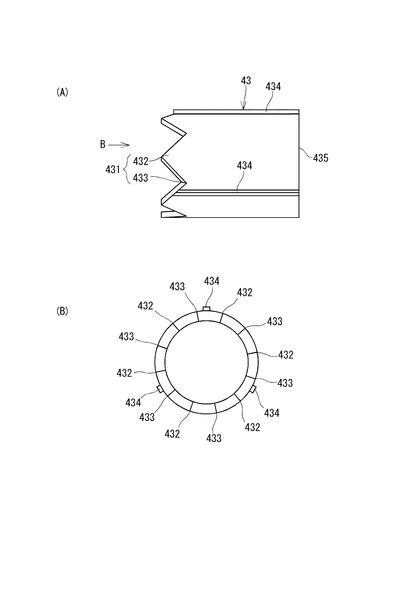
第1中間体43は、図7(A)に示すように、円筒状に形成され、外壁から径外方向に突出する第1突起434、および、一端側の端部に形成されている鋸歯状の第2凹凸部431を有する。第1突起434は、長溝42に入り込み可能、かつ長溝42と摺動可能に形成されている。第2凹凸部431は、図7(B)に示すように、周方向に交互に並ぶよう形成されている凸部432および凹部433を有する。第1中間体43は、第1突起434が長溝42に入り込むよう、第1凹凸部41の径方向内側に往復移動可能に設けられている(図5参照)。
【0047】
第2中間体44は、図8(A)に示すように、円筒状に形成され、外壁から突出する第2突起444、他端側の端部に形成されている鋸歯状の第3凹凸部441、および、一端側の端部に形成されている係止部445を有する。第2突起444は、長溝42に入り込み可能であり、第1凹凸部41の凹部412に当接可能である。図8(B)に示すように、第3凹凸部441は、周方向に交互に並ぶよう形成されている凸部442および凹部443を有し、第2凹凸部431と噛み合い可能である。係止部445は、第2中間体44の外壁から径方向外側に突出するよう形成され、第1凹凸部41の凸部411に当接可能である。ここで、第2中間体44は、一端側の端部がシャフト13に当接し、他端側の第3凹凸部441が第2凹凸部431に対向するよう設けられている(図5参照)。
【0048】
続いて、本実施形態の電磁油圧制御弁2の移動規制部40の作動について図9および図10に基づいて説明する。図9および図10は、第1凹凸部41の内壁、第1中間体43の外壁、および第2中間体44の外壁を周方向に展開した模式図を示す。図9および図10において、図面の左側を「一端側」とし、図面の右側を「他端側」とする。また、図9および図10中の矢印は、第1中間体43または第2中間体44の移動方向を示す。
【0049】
電磁駆動部10に通電されていないとき、スプリング23がスプール22およびシャフト13を介して第2中間体44を他端側に付勢する。よって、図9(イ)に示すように、第2中間体44は、第2突起444が長溝42に入り込み、係止部445が第1凹凸部41の凸部411の一端側の端部に当接するよう位置する。このときのシャフト13の位置を基準位置Oとする。
【0050】
電磁駆動部10に通電されると、プランジャ12は、吸引部112の吸引力により一端側に移動し、第1中間体43を一端側に移動させる。第1中間体43は、第2凹凸部431の斜面と第3凹凸部441の斜面とが当接することにより、第2中間体を一端側に移動させる。図9(ロ)に示すように、凸部442の他端側の端部が凸部411の一端側の端部を超えて変位すると、第2中間体44の第2突起444は長溝42から抜ける。このとき、第2中間体44は、第3凹凸部441の斜面と第2凹凸部431の斜面とが摺動することにより、周方向に回転する。よって、第2突起444と長溝42とは周方向にずれる。ここで、凸部442の他端側の端部が凸部411の一端側の端部を超えて変位するときのシャフト13の位置を第1位置P21とする。
【0051】
ここで、電磁駆動部10への通電を停止すると、吸引部112とプランジャ12との間の電磁吸引力が解消され、スプール22、シャフト13、および、第2中間体44は、スプリング23の付勢力により他端側へ移動する。図9(ハ)に示すように、第2中間体44は、第2突起444の他端側の端部が第1凹凸部41の斜面に当接し、第2突起444の他端側の端部と第1凹凸部41の斜面とが摺動することにより周方向に回転する。図9(ニ)に示すように、第2中間体44は、第2突起444が第1凹凸部41の凹部に引っ掛かることにより、他端側および周方向の移動が規制される。この時のシャフト13の位置を規制位置PSとする。
【0052】
再び電磁駆動部10に通電されると、プランジャ12は、吸引部112の吸引力により第1中間体43を一端側に移動させる。図10(ホ)に示すように、第1中間体43は、第2凹凸部431の斜面と第3凹凸部441の斜面とが当接することにより、第2中間体を一端側に移動させる。図10(ヘ)に示すように、凸部442の他端側の端部が凸部411の一端側の端部を超えて変位すると、第2中間体44は、第3凹凸部441の斜面と第2凹凸部431の斜面とが摺動することにより、周方向に移動する。よって、第2突起444は、周方向に凸部411の一端側の端部を超えて変位する。ここで、第2突起444が周方向に凸部411の一端側の端部を超えて変位するときのシャフト13の位置を第2位置P22とする。本実施形態の場合、第1位置P21と基準位置P0との間の距離は、特許請求の範囲における「第1所定距離」に対応し、第2位置P22と基準位置P0との間の距離は、特許請求の範囲における「第2所定距離」に対応する。本実施形態では、移動規制部40は、第1位置P21と基準位置P0との間の距離と、第2位置P22と基準位置P0との間の距離とが同じとなるよう形成されている。
【0053】
ここで、電磁駆動部10への通電を停止すると、スプール22、シャフト13、および、第2中間体44は、スプリング23の付勢力により他端側へ移動する。図10(ト)に示すように、第2中間体44は、第2突起444の他端側の端部が第1凹凸部41の斜面に当接し、第2突起444の他端側の端部と第1凹凸部41の斜面とが摺動することにより、周方向に回転する。図10(チ)に示すように、第2中間体44は、第2突起44が長溝42に入り込むことにより、他端側および周方向への移動が停止する。
【0054】
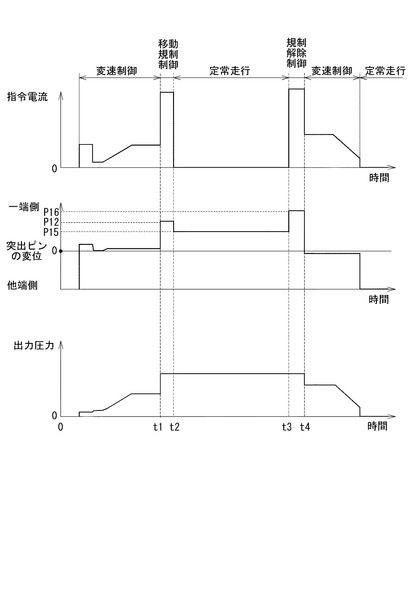
図11は、車両走行時の変速制御を行うとき、指令電流の随時変化、第2中間体44の位置の随時変化、および、電磁油圧制御弁2の出力圧力の随時変化を示す。図11に示すように、時刻t5で電磁駆動部10に流れる指令電流の通電量を増加すると、シャフト13は第1位置P21を超えて変位する。時刻t6で電磁駆動部10に流れる指令電流を完全に停止すると、シャフト13は規制位置PSに係止される。これにより、スプール22が所定位置に位置することにより、調圧部20の出力圧力は所定値を維持することができる。また、時刻t7で電磁駆動部10に流れる指令電流の通電量を増加すると、シャフト13は位置P22を超えて変位する。時刻t8で電磁駆動部10に流れる指令電流を低減すると、シャフト13は位置P0に戻ることが可能になる。ここで、本実施形態の場合、移動規制制御を行う時刻t5と時刻t6との間および規制解除制御を行う時刻t7と時刻t8との間では電力が消費されているが、定常走行する時刻t6と時刻t7との間では電力が消費されていない。
【0055】
上述したように、本実施形態では、シャフト13とプランジャ12との間に設けられている移動規制部40により、シャフト13およびスプール22が所定位置に位置するようシャフト13およびスプール22の移動を規制することができる。よって、上記第1実施形態と同様の効果を得ることができる。
【0056】
(第3実施形態)
本発明の第3実施形態の自動変速機の電磁制御装置を図12に示す。なお、第1実施形態と実質的に同一の部位には同一の符号を付し、説明を省略する。
本実施形態では、図12に示すように、電磁油圧制御弁2は、推力発生手段としての電磁油圧駆動部16を備える比例油圧制御弁である。電磁油圧駆動部16は、ハウジング17、プランジャ12、シャフト13、ソレノイドバルブ18、および、リリーフ弁19を有する。ハウジング17は、プランジャ12およびシャフト13を収容する。
【0057】
ソレノイドバルブ18は、電磁制御弁であり、TCU3の制御信号に基づいて、ハウジング17内に供給する油圧を制御することでプランジャ12を移動させる。本実施形態では、TCU3はポンプ60から供給されるライン圧を制御することによりプランジャ12を移動させ、シャフト13およびスプール22の移動を制御する。これにより、上記第1実施形態と同様の効果を得ることができる。
【0058】
(他の実施形態)
上記実施形態では、電磁制御装置は、自動変速機の摩擦要素の油圧を制御する電磁油圧制御装置として機能する。これに対し、他の実施形態では、自動変速機の摩擦要素のピストンを移動させるピストンストローク制御装置として機能しても良い。また、他の実施形態では、自動変速機の同期装置を移動させるシフトフォーク制御装置として機能しても良い。また、他の実施形態では、自動変速機のクラッチ装置を移動させるクラッチストローク制御装置として機能しても良い。また、他の実施形態では、無段変速機のプーリを移動させるプーリストローク制御装置として機能しても良い。
【0059】
上記実施形態では、移動体が規制位置に位置するとき、電磁力発生手段への通電を完全に遮断する。これに対し、他の実施形態では、移動体が規制位置に位置するとき、電磁力発生手段への通電を低減させることとしても良い。また、移動体が第1位置を超えて変位した後、第2位置まで変位する間、電磁力発生手段に通電する通電量を低減させることとしても良い。
以上説明した本発明は、上記実施形態に限定されるものではなく、その要旨を逸脱しない範囲で種々の実施形態に適用可能である。
【符号の説明】
【0060】
1 ・・・電磁油圧制御装置(電磁制御装置)、
3 ・・・TCU(制御手段)、
10 ・・・電磁駆動部(推力発生手段)、
11 ・・・ステータ(固定体)、
13 ・・・シャフト(移動体)、
16 ・・・電磁油圧駆動部(推力発生手段)、
21 ・・・スリーブ(固定体)、
22 ・・・スプール(移動体)、
23 ・・・スプリング(付勢手段)、
30、40・・・移動規制部(移動規制手段)。
【技術分野】
【0001】
本発明は、電磁制御装置に関する。
【背景技術】
【0002】
従来、自動変速機の複数の摩擦要素の係合または開放を油圧で制御する電磁制御装置が公知である。この電磁制御装置は、筒状のスリーブ、スリーブの内壁に沿って往復移動可能なスプール、および、スプールを移動させる電磁駆動部を有する電磁制御弁を複数備える。電磁制御装置は複数の電磁制御弁を駆動することにより、複数の摩擦要素の係合または開放に関わる油圧を出力する。電磁制御装置はスプールの往復移動を制御することで出力油圧を制御する。
【0003】
ところで、このような構成は、変速段が長時間変化しない、例えば高速巡航走行などの定常走行状態であっても、電磁制御弁の出力油圧を維持するために一部の電磁駆動部への通電を維持する必要が有る。特許文献1に記載の発明では、通電されていないとき低圧の油圧を出力するいわゆるノーマルロータイプの電磁制御弁を適用することで定常走行状態での消費電力の低減を図っている。また、特許文献2に記載の発明では、永久磁石を用いたロック機構をさらに備える。このロック機構により、往復移動するスプールを所定位置に規制することで、電磁制御弁に通電されていない状態であっても電磁制御弁の出力油圧を所定油圧に維持しようとしている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2010−84855号公報
【特許文献2】特開2010−151264号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、特許文献1に記載の発明では、依然として一部の電磁駆動手段への通電が必要であるばかりか、複数の摩擦要素の係合または開放の組み合わせが変わった場合、消費電力を十分に低減することができないおそれがある。
また、特許文献2に記載の発明の場合、追加の磁石やコイル、さらに位置規制解除専用の通電制御回路などの部品の追加により装置全体の体格が大きくなったりコストが増加するおそれがある。
【0006】
本発明は上記の問題に鑑みてなされたものであり、その目的は、低消費電力の電磁制御装置を、小型の体格でかつ低コストで提供することにある。
【課題を解決するための手段】
【0007】
請求項1に記載の発明では、電磁制御装置は、固定体、移動体、付勢手段、推力発生手段、移動規制手段、および、制御手段を備える。固定体は例えば他部材に固定されている。移動体は、固定体に対し相対移動可能に設けられる。付勢手段は、移動体の一端に当接するよう固定体に設けられ、移動体を他端側に付勢する。推力発生手段は、通電により電磁力を発生する電磁力発生手段を有し、電磁力発生手段の発生する電磁力に応じて移動体を固定体に対し相対移動させる推力を発生する。移動規制手段は、固定体の所定の位置である規制位置から他端側への移動体の移動を規制可能である。制御手段は、電磁力発生手段への通電を制御することにより電磁力の大きさを制御する。ここで、移動規制手段は、規制位置の他端側の位置である基準位置から一端側へ第1所定距離離れた第1位置を超えて移動体が一端側へ変位すると、規制位置から基準位置側への移動体の移動を規制する。その後、移動規制手段は、基準位置から一端側へ第2所定距離離れた第2位置を超えて移動体が一端側へ変位すると、基準位置側へ移動体が戻ることを可能にする。また、制御手段は、移動体が第1位置を超えて変位した後、第2位置まで変位する間、電磁力発生手段に通電する通電量を低減させる。
本発明では、移動規制手段を備えるため、移動体が所定位置に位置するよう移動体の移動を規制することができる。これにより、所定位置に移動体を維持させる推力を維持するために、電磁力発生手段への通電を継続する必要がなくなる。よって、電磁制御装置の消費電力を低減することができる。
【0008】
請求項2は推力発生手段をより具体的に示した例である。請求項2に記載の発明では、推力発生手段は、電磁力発生手段の発生する電磁力に応じて圧力を出力し、当該圧力により移動体を固定体に対して相対移動させる。
【0009】
請求項3は移動規制手段をより具体的に示した例である。請求項3に記載の発明では、移動規制手段は、カム溝部および突出ピンを有する。ここで、カム溝部は、固定体に形成され、ハート形状である。突出ピンは、端部がカム溝部に入り込み可能かつ摺動可能となるよう移動体から突出する。すなわち、移動規制手段は、ハートカム機構により構成されている。
本発明では、簡単なハートカム機構で移動規制手段を構成することにより、移動規制手段を簡単かつ小型にすることができるため、電磁制御装置を簡単かつ小型にすることができる。
【0010】
請求項4に記載の発明では、カム溝部は、基準位置、第1位置、規制位置、および第2位置の間で深さが変化するよう形成されている。
請求項5に記載の発明では、第1所定距離は第2所定距離より短い。
【0011】
請求項6は移動規制手段をより具体的に示した例である。請求項6に記載の発明では、固定体は円筒状に形成されている。また、移動規制手段は、第1凹凸部、長溝、第1中間体、および、第2中間体を有する。第1凹凸部は、固定体の内壁から径内方向に突出し、一端側が鋸歯状に形成される。長溝は、第1凹凸部の所定の凹部に対応し軸方向に延びるよう形成される。第1中間体は、円筒状であり、長溝に入り込み可能かつ摺動可能に外壁から突出する第1突起、および、一端側の端部に鋸歯状に形成される第2凹凸部を有する。また、第1中間体は電磁力発生手段の発生する電磁力に応じて一端側へ移動する。第2中間体は、円筒状であり、第1凹凸部と当接可能かつ長溝に入り込み可能に外壁から突出する第2突起、および、他端側の端部に形成され第2凹凸部と噛み合い可能な第3凹凸部を有する。また、第2中間体は、第1中間体により一端側へ付勢されることにより移動体を一端側へ付勢する。すなわち、移動規制手段は、ノック機構により構成されている。 本発明では、簡単なノック機構で移動規制手段を構成することにより、移動規制手段を簡単かつ小型にすることができるため、電磁制御装置を簡単かつ小型にすることができる。
請求項7に記載の発明では、第1所定距離と第2所定距離とは同一である。
【0012】
請求項8は電磁制御装置をより具体的に示した例である。請求項8に記載の発明では、電磁制御装置は、固定体と移動体との相対移動により油路を切り替えることで、自動変速機の摩擦要素の油圧を制御する電磁油圧制御弁を有する。
請求項9は電磁油圧制御弁をより具体的に示した例である。請求項9に記載の発明では、電磁油圧制御弁は二位置切替弁である。
請求項10は電磁油圧制御弁をより具体的に示した例である。請求項10に記載の発明では、電磁油圧制御弁は比例油圧制御弁である。
【0013】
請求項11に記載の発明では、制御手段は、移動体が規制位置に位置するとき、電磁力発生手段への通電を完全に遮断することを特徴とする。
本発明では、電磁力発生手段への通電を完全に遮断することにより、電磁制御装置の消費電力をさらに低減することができる。
【0014】
請求項12に記載の発明では、制御手段は、電磁力発生手段に通電する電流値を制御することにより、第1位置を超えて移動体を変位させることによって規制位置から基準位置への移動体の移動が規制されるよう制御する。
また、請求項13に記載の発明では、制御手段は、電磁力発生手段に通電される電流値を制御することにより、第2位置を超えるよう移動体を変位させることによって、移動体が基準位置に戻ることが可能なよう制御する。
これにより、電磁力発生手段に通電する電流を制御することにより、固定体に対する移動体の移動の規制状態を制御することができる。
【0015】
請求項14に記載の発明では、制御手段は、比例油圧制御弁に供給する油圧を制御することにより、第1位置を超えて移動体を変位させることによって規制位置から基準位置への移動体の移動が規制されるよう制御する。
請求項15に記載の発明では、制御手段は、比例油圧制御弁に供給する油圧を制御することにより、第2位置を超えるよう移動体を変位させることによって、移動体が基準位置に戻ることが可能なよう制御する。
これにより、比例油圧制御弁に供給する油圧を制御することにより、固定体に対する移動体の移動の規制状態を制御することができる。
【0016】
請求項16に記載の発明では、電磁制御装置は電磁油圧制御弁の出力油圧を検出する油圧検出手段をさらに備える。また、制御手段は、移動規制手段により移動体の移動が規制されていると想定される状態において、電磁力発生手段に通電する通電量を低減するときに油圧検出手段により検出された油圧が所定油圧を下回った場合に、電磁力発生手段に通電する通電量の低減を停止する。
これにより、移動規制手段が異常となった場合であっても、移動体を所定位置に維持させることができる。
【図面の簡単な説明】
【0017】
【図1】本発明の第1実施形態による電磁制御装置を示す模式図である。
【図2】本発明の第1実施形態による電磁制御装置の位置制限部を示す模式図である。
【図3】移動規制部のカム溝部を示す模式図であり、(A)は図2のIII方向視平面図であり、(B)は第1溝の位置P0と位置P12との間の断面図であり、(C)は第2溝の位置P13と位置P14との間の断面図であり、(D)は第3溝の位置P15と位置P16との間の断面図であり、(E)は第4溝の位置P17と位置P18との間の断面図である。
【図4】本発明の第1実施形態による電磁制御装置の特性図である。
【図5】本発明の第2実施形態による電磁制御装置の移動規制部を示す模式図である。
【図6】本発明の第2実施形態による電磁制御装置の移動規制部の第1凹凸部を示す模式図であり、(A)は断面図であり、(B)は(A)のB方向視平面図である。
【図7】本発明の第2実施形態による電磁制御装置の移動規制部の第1中間体を示す模式図であり、(A)は側面図であり、(B)は(A)のB方向視平面図である。
【図8】本発明の第2実施形態による電磁制御装置の移動規制部の第2中間体を示す模式図であり、(A)は側面図であり、(B)は(A)のB方向視平面図である。
【図9】本発明の第2実施形態による電磁制御装置の移動規制部の作動を示す模式図である。
【図10】本発明の第2実施形態による電磁制御装置の移動規制部の作動を示す模式図である。
【図11】本発明の第2実施形態による電磁制御装置の特性図である。
【図12】本発明の第3実施形態による電磁制御装置を示す模式図である。
【発明を実施するための形態】
【0018】
以下、本発明の実施形態による電磁制御装置を図面に基づいて説明する。
(第1実施形態)
本発明の第1実施形態による電磁制御装置を図1〜図4に示す。
本発明の電磁制御装置は、例えば自動車の自動変速機の油圧制御システムに適用される電磁油圧制御装置である。図1に示すように、電磁油圧制御装置1は、自動変速機100とともに車両に搭載され、自動変速機100を制御する。図1に示す自動変速機100は、いわゆる多段自動変速機であり、複数の歯車を使用して力を伝え変速比を段階的に変化させる。自動変速機100には、電磁油圧制御装置1から供給される作動油の出力油圧に応じて作動する摩擦要素としての複数のクラッチ5が設けられている。図1では、便宜上、1つのクラッチ5のみを示している。
【0019】
電磁油圧制御装置1は、電磁油圧制御弁2、制御手段としてのトランスミッションコントロールユニット(以下、トランスミッションコントロールユニットを「TCU」という)3、および、油圧センサ4を備える。ここで、電磁油圧制御弁2は、複数のクラッチ5にそれぞれ対応するように複数設けられる。また、TCU3は、複数の電磁油圧制御弁2と電気的に接続される。図1では、便宜上、1つの電磁油圧制御弁2のみを示している。
【0020】
電磁油圧制御弁2は、クラッチ5へ出力される作動油の出力油圧を制御する二位置切替弁である。
電磁油圧制御弁2は、推力発生手段としての電磁駆動部10、調圧部20、および、移動規制手段としての移動規制部30を有する。調圧部20は、電磁駆動部10により駆動され、出力油圧を調整する。調圧部20は、流路61を経由してポンプ60に接続され、流路62を経由してクラッチ5と接続されている。また、調圧部20は、流路63を経由してオイルパン65に接続されている。
【0021】
ポンプ60は、オイルパン65に蓄えられている作動油を吸引および加圧し、所定のライン圧に調整して、流路61を経由して調圧部20に供給する。油圧供給源としてのポンプ60から供給された作動油は、調圧部20にて目標の出力油圧に調整され、流路62を経由してクラッチ5に供給される。調圧部20にて油圧を調整する際に発生する余剰油は、流路63を経由してオイルパン65に戻される。
【0022】
電磁駆動部10は、調圧部20における油圧の調圧動作を制御する。電磁駆動部10は、TCU3から指令電流値に基づく駆動電流が供給され、電磁吸引力を発生する。調圧部20は、電磁駆動部10が発生する電磁吸引力によって制御される。
【0023】
TCU3は、マイクロコンピュータおよび駆動回路等から構成され、変速制御処理を実行する。TCU3には、変速制御処理を実行する上で必要な各種運転情報を取得するためのスロットル開度センサ71、エンジン回転数センサ72、タービン回転数センサ73、レンジセンサ74、車速センサ75、油温センサ76、および油圧センサ4等が接続されている。油圧センサ4は、流路62を流れる作動油の油圧を検出する。
【0024】
TCU3内に設けられるマイクロコンピュータは、メモリに記憶された種々の制御プログラムを実行することにより、目標出力油圧値を算出し、さらに、指令電流値を算出する。駆動回路は、算出された指令電流値に基づき電磁駆動部10を駆動するための駆動電流を発生する。
【0025】
電磁駆動部10は、リニアソレノイドであり、ステータ11、プランジャ12、シャフト13、および、コイル14等を有する。
ステータ11は鉄等の磁性材料で筒状に形成されており、収容部111および吸引部112を有している。収容部111は、プランジャ12を径方向内側に収容している。吸引部112は、収容部111に対して調圧部20側に設けられており、プランジャ12を吸引する電磁吸引力をプランジャ12との間に発生する。
プランジャ12は、鉄等の磁性材料で柱状に形成され、収容部111内に軸方向に往復移動可能に収容される。シャフト13は、プランジャ12の調圧部20側において、吸引部112の内側を往復移動可能に設けられている。
【0026】
コイル14は、収容部111の径方向外側に設置されている。TCU3からの指令電流は、ターミナル15を経由してコイル14に供給される。コイル14に指令電流が供給されると、指令電流に応じた磁束が発生する。磁束はステータ11およびプランジャ12を通過し、吸引部112とプランジャ12との間に電磁吸引力が発生する。そして、プランジャ12は、シャフト13とともに調圧部20側に移動する。
【0027】
調圧部20は、いわゆるスプール弁であり、スリーブ21、スプール22、付勢手段としてのスプリング23等から構成される。
スリーブ21は、ステータ11と同軸上に筒状に形成されている。スリーブ21は、径方向の外側と内側とを連通する複数の流体ポートとしての入力ポート211、出力ポート212、フィードバックポート213、および排出ポート214を有する。スリーブ21の電磁駆動部10と反対側の端部には、調整ねじ24が設けられている。
【0028】
入力ポート211には、流路61が接続され、所定のライン圧に調整された作動油がポンプ60から供給される。排出ポート214は、流路63を経由して出力油圧に調整する際に発生する余剰油をオイルパン65に排出する。
出力ポート212には、流路62が接続され、出力油圧に調整された作動油をクラッチ5に出力する。フィードバックポート213には、流路62から分岐した流路64が接続され、出力ポート212から出力された作動油の一部がスリーブ21の内側に戻される。
【0029】
スプール22は、スリーブ21の径方向内側に、軸方向に往復移動可能に収容される。以下、スプール22の電磁駆動部10(図1の左側)との反対側を「一端側」といい、スプール22の電磁駆動部10側(図1の右側)を「他端側」という。
スプール22は、電磁駆動部10のシャフト13に当接する側からフィードバックランド223、入力ランド221、排出ランド222をこの順に設けている。
ここで、スプール22およびシャフト13は特許請求の範囲における「移動体」に対応し、スリーブ21およびステータ11は「固定体」に対応する。
【0030】
スプリング23は、一端が調整ねじ24に当接し、他端がスプール22の一端側の端面に当接するよう設けられている。スプリング23は、スプール22、シャフト13およびプランジャ12を他端側に付勢している。これにより、電磁駆動部10への通電または非通電によって、スプール22とプランジャ12とは一体に往復移動する。スリーブ21に対するスプール22の往復移動により、スリーブ21とスプール22との間の相対位置が変化すると、調圧部20の出力油圧が変化する。本実施形態の場合、スプール22は、移動規制部30によりスリーブ21の所定位置で移動が規制される。
【0031】
移動規制部30は、シャフト13に設けられ、スリーブ21の所定位置でスプール22の移動を規制可能である。ここで、図2および図3に基づいて、移動規制部30について詳細に説明する。図2は移動規制部30を拡大して示した断面図であり、図3は図2のIII方向から見た平面図である。
移動規制部30は、図2に示すように、カム溝部31および突出ピン32を有する。
カム溝部31は、吸引部112の内壁に、図2のIII方向視ハート形状に形成されている(図3参照)。
【0032】
また、図3に示すように、カム溝部31は、第1溝311、第2溝312、第3溝313、および第4溝314を有する。第1溝311、第2溝312、第3溝313、および第4溝314は、この順で連通され、位置により深さが異なるよう形成されている。
第1溝311は、位置P0および位置P11が位置P12より深くなるよう形成され、位置P11と位置P12との間の深さが徐々に変化するよう形成される(図3(B)参照)。第2溝312は、位置P13が位置P14より深くなるよう形成され、位置P13と位置P14との間の深さが徐々に変化するよう形成される(図3(C)参照)。第3溝313は、位置P15が位置P16より深くなるよう形成され、位置P15と位置P16との間の深さが徐々に変化するよう形成される(図3(D)参照)。第4溝314は、位置P17が位置P18より深くなるよう形成され、位置P17と位置P18との間の深さが徐々に変化するよう形成される(図3(E)参照)。
【0033】
突出ピン32は、図2に示すように、シャフト13の外壁から吸引部112の内壁側に突出するよう、シャフト13の収容凹部131に設けられている。突出ピン32とシャフト13との間にはスプリング132が設けられている。突出ピン32は、スプリング132の付勢力により、カム溝部31に入り込み可能であり、吸引部112の内壁側の端部がカム溝部31の底部と摺動可能である。
【0034】
ここで、本実施形態の電磁油圧制御弁2の移動規制部30の作動について図3に基づいて説明する。
電磁駆動部10に通電されていないとき、スプール22およびシャフト13はスプリング23の付勢力により他端側に付勢され、突出ピン32は位置P0に位置する。ここで、突出ピン32が位置P0に位置するときのシャフト13の位置は、特許請求の範囲における「基準位置」に対応する。
【0035】
電磁駆動部10に通電されると、吸引部112とプランジャ12との間に電磁吸引力が発生する。この電磁吸引力により、プランジャ12は、吸引部112に吸引され、シャフト13およびスプール22を一端側に押す。シャフト13およびスプール22は、プランジャ12の推力によりスプリング23の付勢力に抗して一端側に移動する。
【0036】
また、シャフト13の移動により、位置P0に位置する突出ピン32は、カム溝部31に沿って移動し始める。ここで、突出ピン32は、位置P12を超えて位置P13まで変位し第1溝311から第2溝312に入ると、位置P12と位置P13との間の段差により、第2溝312から第1溝311に戻ることができなくなる。よって、電磁駆動部10に通電する通電量を低減しても、突出ピン32は、第2溝312から第1溝311に戻らない。ここで、突出ピン32が位置P12に位置するときの吸引部111におけるシャフト13の位置は、特許請求の範囲における「第1位置」に対応する。また、位置P0と位置P12との間の距離は、特許請求の範囲における「第1所定距離」に対応する。
【0037】
本実施形態の場合、突出ピン32が位置P12を超えて変位したとき、電磁駆動部10への通電を完全に停止する。このとき、吸引部112とプランジャ12との間の電磁吸引力が消滅され、スプール22、シャフト13、および、プランジャ12は、スプリング23の付勢力により他端側へ移動する。突出ピン32は、第2溝312から第1溝311に戻ることができないため、位置P13から位置P14へ移動する。突出ピン32は、位置P14を超えて位置P15まで変位し第2溝312から第3溝313に入ると、位置P15と位置P14との間の段差により、第3溝313から第2溝312に戻ることができなくなる。また、突出ピン32は、第3溝313の他端側の側壁に係止されることにより、他端側へ移動することができなくなる。よって、突出ピン32の他端側への移動が規制され、シャフト13およびスプール22の他端側への移動が規制される。ここで、突出ピン32が位置P15に位置するときの吸引部111におけるシャフト13の位置は、特許請求の範囲における「規制位置」に対応する。
【0038】
ここで、再び電磁駆動部10に通電すると、プランジャ12の推力により、シャフト13およびスプール22は一端側へ移動する。ここで、突出ピン32は、第3溝313から第2溝312に戻ることができないため、位置P15から位置P16へ移動する。突出ピン32は、位置P16を超えて位置P17まで変位し第3溝313から第4溝314に入ると、位置P16と位置P17との間の段差により、第4溝314から第3溝313に戻ることができなくなる。よって、電磁駆動部10に通電する通電量を低減しても、突出ピン32は、第4溝314から第3溝313に戻らない。突出ピン32が位置P16に位置するときの吸引部111におけるシャフト13の位置は、特許請求の範囲における「第2位置」に対応する。また、位置P0と位置P16との間の距離は、特許請求の範囲における「第2所定距離」に対応する。ここで、カム溝部31は、位置P0と位置P16との間の距離が位置P0と位置P12との間の距離より長くなるよう形成されている。
【0039】
本実施形態の場合、突出ピン32が位置P16を超えて変位したとき、電磁駆動部10への通電を低減または停止する。このとき、吸引部112とプランジャ12との間の電磁吸引力が消滅され、スプール22、シャフト13、および、プランジャ12は、スプリング23の付勢力により他端側へ移動する。ここで、突出ピン32は、第4溝314から第3溝313に戻ることができないため、位置P17から位置P18へ移動する。よって、スプール22およびシャフト13はスプリング23の付勢力により他端側へ移動し、突出ピン32は位置P0に戻ることが可能になる。
【0040】
図4は、車両走行時の変速制御を行うときの時間に伴う指令電流の変化、突出ピン32の位置の変化、および、電磁油圧制御弁2の出力圧力の変化を示す。図4に示すように、時刻t1で電磁駆動部10に流れる指令電流の通電量を増加すると、突出ピン32は位置P12を超えて変位する。時刻t2で電磁駆動部10に流れる指令電流を完全に停止すると、突出ピン32は位置P15に係止される。これにより、スプール22が所定位置に位置することにより、調圧部20の出力圧力は所定値を維持することができる。また、時刻t3で電磁駆動部10に流れる指令電流の通電量を増加すると、突出ピン32は位置P16を超えて変位する。時刻t4で電磁駆動部10に流れる指令電流を低減すると、突出ピン32は位置P0に戻ることが可能になる。ここで、本実施形態の場合、移動規制制御を行う時刻t1と時刻t2との間および規制解除制御を行う時刻t3と時刻t4との間では電力が消費されているが、定常走行する時刻t2と時刻t3との間では電力が消費されていない。
【0041】
上述したように、本実施形態では、シャフト13に設けられている突出ピン32および吸引部112に形成されているカム溝部31により、シャフト13およびスプール22が所定位置に位置するようシャフト13およびスプール22の移動を規制することができる。これにより、シャフト13およびスプール22を所定位置に保持する推力を維持するために、電磁駆動部10への通電を継続する必要がなくなる。よって、電磁油圧制御装置1の消費電力を低減することができる。
【0042】
また、本実施形態では、簡単な構成で、シャフト13およびスプール22を所定位置に規制することができるため、電磁油圧制御装置1の小型化に貢献することができる。
【0043】
(第2実施形態)
本発明の第2実施形態の自動変速機の電磁制御装置の移動規制部を図5〜図11に示す。なお、第1実施形態と実質的に同一の部位には同一の符号を付し、説明を省略する。
本実施形態では、移動規制部40は、図5に示すように、シャフト13とプランジャ12との間に設けられ、第1凹凸部41、長溝42、第1中間体43、および第2中間体44を有する。
【0044】
図6(A)に示すように、第1凹凸部41は、吸引部112の内壁から径内方向に突出するよう形成されている。また、第1凹凸部41は、一端側が鋸歯状に形成され、凸部411および凹部412を有する。凸部411および凹部412は、図6(B)に示すように、吸引部112の内壁の周方向に交互に並ぶよう形成されている。
【0045】
長溝42は、所定の凹部412に対応し軸方向に延びるよう形成されている。ここで、長溝42に対応している凹部412と、長溝42に対応していない凹部412とは、吸引部112の内壁の周方向に交互に配置されている(図6(B)参照)。
【0046】
第1中間体43は、図7(A)に示すように、円筒状に形成され、外壁から径外方向に突出する第1突起434、および、一端側の端部に形成されている鋸歯状の第2凹凸部431を有する。第1突起434は、長溝42に入り込み可能、かつ長溝42と摺動可能に形成されている。第2凹凸部431は、図7(B)に示すように、周方向に交互に並ぶよう形成されている凸部432および凹部433を有する。第1中間体43は、第1突起434が長溝42に入り込むよう、第1凹凸部41の径方向内側に往復移動可能に設けられている(図5参照)。
【0047】
第2中間体44は、図8(A)に示すように、円筒状に形成され、外壁から突出する第2突起444、他端側の端部に形成されている鋸歯状の第3凹凸部441、および、一端側の端部に形成されている係止部445を有する。第2突起444は、長溝42に入り込み可能であり、第1凹凸部41の凹部412に当接可能である。図8(B)に示すように、第3凹凸部441は、周方向に交互に並ぶよう形成されている凸部442および凹部443を有し、第2凹凸部431と噛み合い可能である。係止部445は、第2中間体44の外壁から径方向外側に突出するよう形成され、第1凹凸部41の凸部411に当接可能である。ここで、第2中間体44は、一端側の端部がシャフト13に当接し、他端側の第3凹凸部441が第2凹凸部431に対向するよう設けられている(図5参照)。
【0048】
続いて、本実施形態の電磁油圧制御弁2の移動規制部40の作動について図9および図10に基づいて説明する。図9および図10は、第1凹凸部41の内壁、第1中間体43の外壁、および第2中間体44の外壁を周方向に展開した模式図を示す。図9および図10において、図面の左側を「一端側」とし、図面の右側を「他端側」とする。また、図9および図10中の矢印は、第1中間体43または第2中間体44の移動方向を示す。
【0049】
電磁駆動部10に通電されていないとき、スプリング23がスプール22およびシャフト13を介して第2中間体44を他端側に付勢する。よって、図9(イ)に示すように、第2中間体44は、第2突起444が長溝42に入り込み、係止部445が第1凹凸部41の凸部411の一端側の端部に当接するよう位置する。このときのシャフト13の位置を基準位置Oとする。
【0050】
電磁駆動部10に通電されると、プランジャ12は、吸引部112の吸引力により一端側に移動し、第1中間体43を一端側に移動させる。第1中間体43は、第2凹凸部431の斜面と第3凹凸部441の斜面とが当接することにより、第2中間体を一端側に移動させる。図9(ロ)に示すように、凸部442の他端側の端部が凸部411の一端側の端部を超えて変位すると、第2中間体44の第2突起444は長溝42から抜ける。このとき、第2中間体44は、第3凹凸部441の斜面と第2凹凸部431の斜面とが摺動することにより、周方向に回転する。よって、第2突起444と長溝42とは周方向にずれる。ここで、凸部442の他端側の端部が凸部411の一端側の端部を超えて変位するときのシャフト13の位置を第1位置P21とする。
【0051】
ここで、電磁駆動部10への通電を停止すると、吸引部112とプランジャ12との間の電磁吸引力が解消され、スプール22、シャフト13、および、第2中間体44は、スプリング23の付勢力により他端側へ移動する。図9(ハ)に示すように、第2中間体44は、第2突起444の他端側の端部が第1凹凸部41の斜面に当接し、第2突起444の他端側の端部と第1凹凸部41の斜面とが摺動することにより周方向に回転する。図9(ニ)に示すように、第2中間体44は、第2突起444が第1凹凸部41の凹部に引っ掛かることにより、他端側および周方向の移動が規制される。この時のシャフト13の位置を規制位置PSとする。
【0052】
再び電磁駆動部10に通電されると、プランジャ12は、吸引部112の吸引力により第1中間体43を一端側に移動させる。図10(ホ)に示すように、第1中間体43は、第2凹凸部431の斜面と第3凹凸部441の斜面とが当接することにより、第2中間体を一端側に移動させる。図10(ヘ)に示すように、凸部442の他端側の端部が凸部411の一端側の端部を超えて変位すると、第2中間体44は、第3凹凸部441の斜面と第2凹凸部431の斜面とが摺動することにより、周方向に移動する。よって、第2突起444は、周方向に凸部411の一端側の端部を超えて変位する。ここで、第2突起444が周方向に凸部411の一端側の端部を超えて変位するときのシャフト13の位置を第2位置P22とする。本実施形態の場合、第1位置P21と基準位置P0との間の距離は、特許請求の範囲における「第1所定距離」に対応し、第2位置P22と基準位置P0との間の距離は、特許請求の範囲における「第2所定距離」に対応する。本実施形態では、移動規制部40は、第1位置P21と基準位置P0との間の距離と、第2位置P22と基準位置P0との間の距離とが同じとなるよう形成されている。
【0053】
ここで、電磁駆動部10への通電を停止すると、スプール22、シャフト13、および、第2中間体44は、スプリング23の付勢力により他端側へ移動する。図10(ト)に示すように、第2中間体44は、第2突起444の他端側の端部が第1凹凸部41の斜面に当接し、第2突起444の他端側の端部と第1凹凸部41の斜面とが摺動することにより、周方向に回転する。図10(チ)に示すように、第2中間体44は、第2突起44が長溝42に入り込むことにより、他端側および周方向への移動が停止する。
【0054】
図11は、車両走行時の変速制御を行うとき、指令電流の随時変化、第2中間体44の位置の随時変化、および、電磁油圧制御弁2の出力圧力の随時変化を示す。図11に示すように、時刻t5で電磁駆動部10に流れる指令電流の通電量を増加すると、シャフト13は第1位置P21を超えて変位する。時刻t6で電磁駆動部10に流れる指令電流を完全に停止すると、シャフト13は規制位置PSに係止される。これにより、スプール22が所定位置に位置することにより、調圧部20の出力圧力は所定値を維持することができる。また、時刻t7で電磁駆動部10に流れる指令電流の通電量を増加すると、シャフト13は位置P22を超えて変位する。時刻t8で電磁駆動部10に流れる指令電流を低減すると、シャフト13は位置P0に戻ることが可能になる。ここで、本実施形態の場合、移動規制制御を行う時刻t5と時刻t6との間および規制解除制御を行う時刻t7と時刻t8との間では電力が消費されているが、定常走行する時刻t6と時刻t7との間では電力が消費されていない。
【0055】
上述したように、本実施形態では、シャフト13とプランジャ12との間に設けられている移動規制部40により、シャフト13およびスプール22が所定位置に位置するようシャフト13およびスプール22の移動を規制することができる。よって、上記第1実施形態と同様の効果を得ることができる。
【0056】
(第3実施形態)
本発明の第3実施形態の自動変速機の電磁制御装置を図12に示す。なお、第1実施形態と実質的に同一の部位には同一の符号を付し、説明を省略する。
本実施形態では、図12に示すように、電磁油圧制御弁2は、推力発生手段としての電磁油圧駆動部16を備える比例油圧制御弁である。電磁油圧駆動部16は、ハウジング17、プランジャ12、シャフト13、ソレノイドバルブ18、および、リリーフ弁19を有する。ハウジング17は、プランジャ12およびシャフト13を収容する。
【0057】
ソレノイドバルブ18は、電磁制御弁であり、TCU3の制御信号に基づいて、ハウジング17内に供給する油圧を制御することでプランジャ12を移動させる。本実施形態では、TCU3はポンプ60から供給されるライン圧を制御することによりプランジャ12を移動させ、シャフト13およびスプール22の移動を制御する。これにより、上記第1実施形態と同様の効果を得ることができる。
【0058】
(他の実施形態)
上記実施形態では、電磁制御装置は、自動変速機の摩擦要素の油圧を制御する電磁油圧制御装置として機能する。これに対し、他の実施形態では、自動変速機の摩擦要素のピストンを移動させるピストンストローク制御装置として機能しても良い。また、他の実施形態では、自動変速機の同期装置を移動させるシフトフォーク制御装置として機能しても良い。また、他の実施形態では、自動変速機のクラッチ装置を移動させるクラッチストローク制御装置として機能しても良い。また、他の実施形態では、無段変速機のプーリを移動させるプーリストローク制御装置として機能しても良い。
【0059】
上記実施形態では、移動体が規制位置に位置するとき、電磁力発生手段への通電を完全に遮断する。これに対し、他の実施形態では、移動体が規制位置に位置するとき、電磁力発生手段への通電を低減させることとしても良い。また、移動体が第1位置を超えて変位した後、第2位置まで変位する間、電磁力発生手段に通電する通電量を低減させることとしても良い。
以上説明した本発明は、上記実施形態に限定されるものではなく、その要旨を逸脱しない範囲で種々の実施形態に適用可能である。
【符号の説明】
【0060】
1 ・・・電磁油圧制御装置(電磁制御装置)、
3 ・・・TCU(制御手段)、
10 ・・・電磁駆動部(推力発生手段)、
11 ・・・ステータ(固定体)、
13 ・・・シャフト(移動体)、
16 ・・・電磁油圧駆動部(推力発生手段)、
21 ・・・スリーブ(固定体)、
22 ・・・スプール(移動体)、
23 ・・・スプリング(付勢手段)、
30、40・・・移動規制部(移動規制手段)。
【特許請求の範囲】
【請求項1】
固定体と、
前記固定体に対し相対移動可能に設けられる移動体と、
前記移動体の一端に当接するよう前記固定体に設けられ、前記移動体を他端側に付勢する付勢手段と、
通電により電磁力を発生する電磁力発生手段を有し、当該電磁力発生手段の発生する前記電磁力に応じて前記移動体を前記固定体に対し相対移動させる推力を発生する推力発生手段と、
前記固定体の所定の位置である規制位置から前記他端側への前記移動体の移動を規制可能な移動規制手段と、
前記電磁力発生手段への通電を制御することにより前記電磁力の大きさを制御する制御手段と、を備え、
前記移動規制手段は、
前記規制位置の前記他端側の位置である基準位置から前記一端側へ第1所定距離離れた第1位置を超えて前記移動体が前記一端側へ変位すると、前記規制位置から前記基準位置側への前記移動体の移動を規制し、
その後、前記基準位置から前記一端側へ第2所定距離離れた第2位置を超えて前記移動体が前記一端側へ変位すると、前記基準位置へ前記移動体が戻ることを可能にし、
前記制御手段は、前記移動体が前記第1位置を超えて変位した後、前記第2位置まで変位する間、前記電磁力発生手段に通電する通電量を低減させることを特徴とする電磁制御装置。
【請求項2】
前記推力発生手段は、前記電磁力発生手段の発生する前記電磁力に応じて圧力を出力し、当該圧力により前記移動体を前記固定体に対して相対移動させることを特徴とする請求項1に記載の電磁制御装置。
【請求項3】
前記移動規制手段は、
前記固定体に形成されたハート形状のカム溝部と、
端部が前記カム溝部に入り込み可能かつ摺動可能となるよう前記移動体から突出する突出ピンと、を有することを特徴とする請求項1または2に記載の電磁制御装置。
【請求項4】
前記カム溝部は、前記基準位置、前記第1位置、前記規制位置、および前記第2位置の間で深さが変化するよう形成されていることを特徴とする請求項3に記載の電磁制御装置。
【請求項5】
前記第1所定距離は前記第2所定距離より短いことを特徴とする請求項3または4に記載の電磁制御装置。
【請求項6】
前記固定体は円筒状に形成され、
前記移動規制手段は、
前記固定体の内壁から径内方向に突出し、前記一端側が鋸歯状に形成される第1凹凸部と、
前記第1凹凸部の所定の凹部に対応し軸方向に延びるよう形成される長溝と、
前記長溝に入り込み可能かつ摺動可能に外壁から突出する第1突起、および、前記一端側の端部に鋸歯状に形成される第2凹凸部を有し、前記電磁力発生手段の発生する前記電磁力に応じて前記一端側へ移動する円筒状の第1中間体と、
前記第1凹凸部と当接可能かつ前記長溝に入り込み可能に外壁から突出する第2突起、および、前記他端側の端部に形成され前記第2凹凸部と噛み合い可能な第3凹凸部を有し、前記第1中間体により前記一端側へ付勢されることにより前記移動体を前記一端側へ付勢する円筒状の第2中間体と、を有することを特徴とする請求項1または2に記載の電磁制御装置。
【請求項7】
前記第1所定距離と前記第2所定距離とは同一であることを特徴とする請求項6に記載の電磁制御装置。
【請求項8】
前記固定体と前記移動体との相対移動により油路を切り替えることで、自動変速機の摩擦要素の油圧を制御する電磁油圧制御弁を有することを特徴とする請求項1〜7のいずれか一項に記載の電磁制御装置。
【請求項9】
前記電磁油圧制御弁は二位置切替弁であることを特徴とする請求項8に記載の電磁制御装置。
【請求項10】
前記電磁油圧制御弁は比例油圧制御弁であることを特徴とする請求項8または9に記載の電磁制御装置。
【請求項11】
前記制御手段は、前記移動体が前記規制位置に位置するとき、前記電磁力発生手段への通電を完全に遮断することを特徴とする請求項1〜10のいずれか一項に記載の電磁制御装置。
【請求項12】
前記制御手段は、前記電磁力発生手段に通電する電流値を制御することにより、前記第1位置を超えて前記移動体を変位させることによって前記規制位置から前記基準位置への前記移動体の移動が規制されるよう制御することを特徴とする請求項1〜11のいずれか一項に記載の電磁制御装置。
【請求項13】
前記制御手段は、前記電磁力発生手段に通電される電流値を制御することにより、前記第2位置を超えるよう前記移動体を変位させることによって、前記移動体が前記基準位置に戻ることが可能なよう制御することを特徴とする請求項1〜12のいずれか一項に記載の電磁制御装置。
【請求項14】
前記制御手段は、前記比例油圧制御弁に供給する油圧を制御することにより、前記第1位置を超えて前記移動体を変位させることによって前記規制位置から前記基準位置への前記移動体の移動が規制されるよう制御することを特徴とする請求項10に記載の電磁制御装置。
【請求項15】
前記制御手段は、前記比例油圧制御弁に供給する油圧を制御することにより、前記第2位置を超えるよう前記移動体を変位させることによって、前記移動体が前記基準位置に戻ることが可能なよう制御することを特徴とする請求項10または14に記載の電磁制御装置。
【請求項16】
前記電磁油圧制御弁の出力油圧を検出する油圧検出手段をさらに備え、
前記制御手段は、
前記移動規制手段により前記移動体の移動が規制されていると想定される状態において、
前記電磁力発生手段に通電する通電量を低減するときに前記油圧検出手段により検出された油圧が所定油圧を下回った場合に、前記電磁力発生手段に通電する通電量の低減を停止することを特徴とする請求項8〜10のいずれか一項に記載の電磁制御装置。
【請求項1】
固定体と、
前記固定体に対し相対移動可能に設けられる移動体と、
前記移動体の一端に当接するよう前記固定体に設けられ、前記移動体を他端側に付勢する付勢手段と、
通電により電磁力を発生する電磁力発生手段を有し、当該電磁力発生手段の発生する前記電磁力に応じて前記移動体を前記固定体に対し相対移動させる推力を発生する推力発生手段と、
前記固定体の所定の位置である規制位置から前記他端側への前記移動体の移動を規制可能な移動規制手段と、
前記電磁力発生手段への通電を制御することにより前記電磁力の大きさを制御する制御手段と、を備え、
前記移動規制手段は、
前記規制位置の前記他端側の位置である基準位置から前記一端側へ第1所定距離離れた第1位置を超えて前記移動体が前記一端側へ変位すると、前記規制位置から前記基準位置側への前記移動体の移動を規制し、
その後、前記基準位置から前記一端側へ第2所定距離離れた第2位置を超えて前記移動体が前記一端側へ変位すると、前記基準位置へ前記移動体が戻ることを可能にし、
前記制御手段は、前記移動体が前記第1位置を超えて変位した後、前記第2位置まで変位する間、前記電磁力発生手段に通電する通電量を低減させることを特徴とする電磁制御装置。
【請求項2】
前記推力発生手段は、前記電磁力発生手段の発生する前記電磁力に応じて圧力を出力し、当該圧力により前記移動体を前記固定体に対して相対移動させることを特徴とする請求項1に記載の電磁制御装置。
【請求項3】
前記移動規制手段は、
前記固定体に形成されたハート形状のカム溝部と、
端部が前記カム溝部に入り込み可能かつ摺動可能となるよう前記移動体から突出する突出ピンと、を有することを特徴とする請求項1または2に記載の電磁制御装置。
【請求項4】
前記カム溝部は、前記基準位置、前記第1位置、前記規制位置、および前記第2位置の間で深さが変化するよう形成されていることを特徴とする請求項3に記載の電磁制御装置。
【請求項5】
前記第1所定距離は前記第2所定距離より短いことを特徴とする請求項3または4に記載の電磁制御装置。
【請求項6】
前記固定体は円筒状に形成され、
前記移動規制手段は、
前記固定体の内壁から径内方向に突出し、前記一端側が鋸歯状に形成される第1凹凸部と、
前記第1凹凸部の所定の凹部に対応し軸方向に延びるよう形成される長溝と、
前記長溝に入り込み可能かつ摺動可能に外壁から突出する第1突起、および、前記一端側の端部に鋸歯状に形成される第2凹凸部を有し、前記電磁力発生手段の発生する前記電磁力に応じて前記一端側へ移動する円筒状の第1中間体と、
前記第1凹凸部と当接可能かつ前記長溝に入り込み可能に外壁から突出する第2突起、および、前記他端側の端部に形成され前記第2凹凸部と噛み合い可能な第3凹凸部を有し、前記第1中間体により前記一端側へ付勢されることにより前記移動体を前記一端側へ付勢する円筒状の第2中間体と、を有することを特徴とする請求項1または2に記載の電磁制御装置。
【請求項7】
前記第1所定距離と前記第2所定距離とは同一であることを特徴とする請求項6に記載の電磁制御装置。
【請求項8】
前記固定体と前記移動体との相対移動により油路を切り替えることで、自動変速機の摩擦要素の油圧を制御する電磁油圧制御弁を有することを特徴とする請求項1〜7のいずれか一項に記載の電磁制御装置。
【請求項9】
前記電磁油圧制御弁は二位置切替弁であることを特徴とする請求項8に記載の電磁制御装置。
【請求項10】
前記電磁油圧制御弁は比例油圧制御弁であることを特徴とする請求項8または9に記載の電磁制御装置。
【請求項11】
前記制御手段は、前記移動体が前記規制位置に位置するとき、前記電磁力発生手段への通電を完全に遮断することを特徴とする請求項1〜10のいずれか一項に記載の電磁制御装置。
【請求項12】
前記制御手段は、前記電磁力発生手段に通電する電流値を制御することにより、前記第1位置を超えて前記移動体を変位させることによって前記規制位置から前記基準位置への前記移動体の移動が規制されるよう制御することを特徴とする請求項1〜11のいずれか一項に記載の電磁制御装置。
【請求項13】
前記制御手段は、前記電磁力発生手段に通電される電流値を制御することにより、前記第2位置を超えるよう前記移動体を変位させることによって、前記移動体が前記基準位置に戻ることが可能なよう制御することを特徴とする請求項1〜12のいずれか一項に記載の電磁制御装置。
【請求項14】
前記制御手段は、前記比例油圧制御弁に供給する油圧を制御することにより、前記第1位置を超えて前記移動体を変位させることによって前記規制位置から前記基準位置への前記移動体の移動が規制されるよう制御することを特徴とする請求項10に記載の電磁制御装置。
【請求項15】
前記制御手段は、前記比例油圧制御弁に供給する油圧を制御することにより、前記第2位置を超えるよう前記移動体を変位させることによって、前記移動体が前記基準位置に戻ることが可能なよう制御することを特徴とする請求項10または14に記載の電磁制御装置。
【請求項16】
前記電磁油圧制御弁の出力油圧を検出する油圧検出手段をさらに備え、
前記制御手段は、
前記移動規制手段により前記移動体の移動が規制されていると想定される状態において、
前記電磁力発生手段に通電する通電量を低減するときに前記油圧検出手段により検出された油圧が所定油圧を下回った場合に、前記電磁力発生手段に通電する通電量の低減を停止することを特徴とする請求項8〜10のいずれか一項に記載の電磁制御装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【公開番号】特開2013−104443(P2013−104443A)
【公開日】平成25年5月30日(2013.5.30)
【国際特許分類】
【出願番号】特願2011−246479(P2011−246479)
【出願日】平成23年11月10日(2011.11.10)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
【公開日】平成25年5月30日(2013.5.30)
【国際特許分類】
【出願日】平成23年11月10日(2011.11.10)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
[ Back to top ]