
電磁制振装置、電磁制振制御プログラム
【課題】上位コンピュータから蛇行量が提供されない使用環境下であっても専用のエッジ位置検出センサや蛇行量検出機器が不要であり、厚み方向に湾曲した状態で幅方向に蛇行して走行する鋼板の振動を適切に抑制可能な電磁制振装置を提供する。
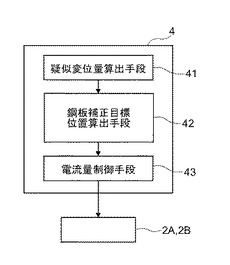
【解決手段】電磁石対2を鋼板Sの幅方向に複数並べ、制御部4によって各電磁石対2の電磁石2A、2B間を走行する鋼板Sの振動を抑制する電磁制振装置1において、電磁石対2に付帯させたセンサ3のオン・オフ状態の切替に基づいて鋼板Sの疑似変位量を算出する疑似変位量算出手段41と、疑似変位量に基づいて各電磁石対2における鋼板Sの補正目標位置を算出する鋼板補正目標位置算出手段42と、各電磁石対2における鋼板Sの位置が補正目標位置となるように電磁石2A,2Bに流す電流量を個別に制御する電流量制御手段43とを備えた制御部4を適用した。
【解決手段】電磁石対2を鋼板Sの幅方向に複数並べ、制御部4によって各電磁石対2の電磁石2A、2B間を走行する鋼板Sの振動を抑制する電磁制振装置1において、電磁石対2に付帯させたセンサ3のオン・オフ状態の切替に基づいて鋼板Sの疑似変位量を算出する疑似変位量算出手段41と、疑似変位量に基づいて各電磁石対2における鋼板Sの補正目標位置を算出する鋼板補正目標位置算出手段42と、各電磁石対2における鋼板Sの位置が補正目標位置となるように電磁石2A,2Bに流す電流量を個別に制御する電流量制御手段43とを備えた制御部4を適用した。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、電磁石から出力する電流によって、搬送中の鋼板が振動することを防止・抑制可能な電磁制振装置、及びこのような電磁制振装置に適用可能な電磁制振制御プログラムに関するものである。
【背景技術】
【0002】
従来より、例えば連続溶融亜鉛メッキラインにおいて、溶融亜鉛槽を通過して引き上げられながら走行する鋼板に対して、エアーナイフ部(例えば空気ノズルを用いて構成したもの)から加圧空気又は加圧ガスを噴出させることによって過剰な溶融亜鉛を吹き落とし、所望のメッキ厚みにすることが行われている。このような場合、鋼板がエアーナイフ部に対して接離する方向に振動すれば、ノズルと鋼板との距離が変動し、その結果、鋼板が受ける圧力(噴射力)が変動してメッキの厚みが不均一となり、品質の劣化を招くことがある。
【0003】
そこで、走行する鋼板を挟む位置に対向配置した電磁石に流す電流を制御することにより、電磁石の吸引力を制御し、走行する鋼板の振動を低減する電磁制振装置が考えられている(例えば特許文献1)。この種の電磁制振装置は、鋼板の厚み方向に対向配置した電磁石を備えた電磁石対を鋼板の幅方向に複数配置し、さらに、鋼板との相対位置(距離)を検知する変位センサを各電磁石に関連付けて設け、各変位センサが検出する鋼板との相対位置(距離)に基づいて各電磁石対の電磁石に流す電流を制御するように構成されている。
【0004】
また、鋼板を幅方向に湾曲させた状態で搬送することにより、搬送中の鋼板自体の剛性を上げる試みもなされている。この場合、電磁制振装置による適切な制振制御が発揮され得る鋼板の湾曲形状は予め設定されており、電磁制振装置では、鋼板が所期の湾曲形状となるように各電磁石対を構成する電磁石の出力電流を制御している。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2009−179834号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
ところで、対向する電磁石間を走行する鋼板は幅方向に蛇行する場合がある。そして、蛇行が発生した場合においても、各電磁石の出力電流を所期の設定値のままで制御した場合、鋼板は蛇行した位置において所期の設定値で出力される電磁石の電磁吸引力によって厚み方向の形状が所期の湾曲形状とは異なる形状(例えば左右が非対称ないびつな形状)になるおそれがある。そして、所期の湾曲形状とは異なる形状のまま走行する鋼板に対しては安定した制振作用を発揮することができず、適切な制御が困難になるという問題が想定される。
【0007】
そこで、本出願人は、厚み方向に湾曲した状態で走行する鋼板が幅方向に蛇行した場合であっても、所期の湾曲形状を維持した搬送を可能とすることで、この鋼板の振動を適切に抑制することが可能な電磁制振装置として、リアルタイム又は所定時間毎に入力された鋼板の幅方向への変位量に基づいて、所期の湾曲形状となるように各電磁石対を構成する電磁石間における鋼板の補正目標位置を算出する鋼板補正目標位置算出手段と、幅方向へ変位した鋼板を鋼板補正目標位置算出手段で求めた各電磁石対における鋼板の補正目標位置へ移動させるように各電磁石対を構成する電磁石に流す電流量を個別に制御する電流量制御手段とを備えた制御部を用いた電磁制振装置を開発し、既に特許出願している(特願2010−64842)。
【0008】
しかしながら、上記態様は、電磁制振装置とは別の装置(例えば上位コンピュータ等)又は電磁制振装置の一部(例えば蛇行量検出機器等)から鋼板の幅方向への変位量(蛇行量)が入力されることが前提である。したがって、この前提条件が満たされない使用条件下では、電磁制振装置自体で鋼板の変位量を判断し、制振制御を行うことが望ましいと考えられた。
【0009】
本発明は、このような問題に着目してなされたものであって、主たる目的は、エッジ位置検出用の専用センサや特別な蛇行量検出機器を必須の構造とすることなく、また上位コンピュータなどから蛇行量に関する情報が提供されない使用環境下においても、幅方向に蛇行した鋼板を所期の湾曲形状に維持して搬送することができ、この鋼板の振動を適切に抑制することが可能な電磁制振装置を提供することにある。
【課題を解決するための手段】
【0010】
すなわち、本発明は、所定方向に走行する鋼板の厚み方向に対向配置した電磁石の組である電磁石対を鋼板の幅方向に複数並べ、各電磁石に流す電流を制御する制御部によって各電磁石対の電磁石間をこれら電磁石の対向方向に湾曲した形状で走行する鋼板の振動を抑制する電磁制振装置に関するものである。ここで、「鋼板の湾曲形状」としては、一般的な部分円弧(部分楕円弧(弓形)を含む)状の他、複数の部分円弧を組み合わせた形状(波状、S字状)を例示することができる。また、本発明の電磁制振装置では、鋼板の搬送方向は特に限定されず、引き上げながら電磁石の間を通過するようにした鋼板、または引き下げながら電磁石の間を通過するようにした鋼板、或いは水平に移動しながら電磁石の間を通過するようにした鋼板、これら何れの方向に搬送される鋼板であっても本発明の電磁制振装置の制振対象になる。
【0011】
そして、本発明に係る電磁制振装置は、複数の電磁石対を幅方向に配置した電磁石対領域の幅方向中央部又は幅方向中央部近傍に配置される電磁石対を除く各電磁石対に、当該電磁石対の電磁石間に鋼板の存否を検出可能なセンサを付帯させ、制御部として、幅方向に蛇行していない正規状態における鋼板の幅方向中央位置である鋼板中央位置から、電磁石対の電磁石間における鋼板の存在を検出したオン状態から電磁石対の電磁石間に鋼板の存在を検出しないオフ状態に切り替わったセンサのうち電磁石対領域の幅方向中央部に最も近いセンサの位置、又はオフ状態からオン状態に切り替わったセンサのうち電磁石対領域の幅方向中央部から最も遠いセンサの位置の少なくとも何れか一方のセンサの位置に基づく切替センサ基準位置までの距離と、鋼板の幅寸法の半分の長さとの差を鋼板の疑似変位量として算出する疑似変位量算出手段と、疑似変位量算出手段で算出した疑似変位量に基づいて所期の湾曲形状となるように各電磁石対を構成する電磁石間における鋼板の補正目標位置を算出する鋼板補正目標位置算出手段と、幅方向へ変位した鋼板を鋼板補正目標位置算出手段で求めた各電磁石対における鋼板の補正目標位置へ移動させるように各電磁石対を構成する電磁石に流す電流量を個別に制御する電流量制御手段とを適用したことを特徴としている。
【0012】
なお、鋼板の幅寸法を制御部に対して出力する出力源は電磁制振装置とは別の装置(例えば上位コンピュータ等)又は電磁制振装置の一部の何れであってもよい。また、「各電磁石対における鋼板の補正目標位置」は、「各電磁石対を構成する電磁石間における鋼板の補正目標位置」と同義であり、以下の説明においても便宜上「電磁石対における鋼板の位置」と記載しているが、当該記載は「電磁石対を構成する電磁石間における鋼板の位置」と同義である。また、鋼板の疑似変位量を算出するタイミングや、疑似変位量に基づいて鋼板の補正目標位置を算出するタイミングは、リアルタイム又は所定時間毎であればよい。
【0013】
このような電磁制振装置であれば、上位コンピュータなどの外部から制御部に対して鋼板の実際の変位量(蛇行量)に関する情報が入力されない使用環境下であっても、制御部の疑似変位量算出部により、オン状態からオフ状態に切り替わったセンサのうち電磁石対領域の幅方向中央部から最も近いセンサ(最内側のセンサ)の位置、又はオフ状態からオン状態に切り替わったセンサのうち電磁石対領域の幅方向中央部から最も遠いセンサ(最外側のセンサ)の位置に基づいて切替センサ基準位置を決定し、この切替センサ基準位置と鋼板の幅寸法に関する情報を利用して鋼板の疑似変位量(鋼板の疑似蛇行量)を演算して求めることができる。この疑似変位量算出部では、オン状態とオフ状態との間で切り替わったセンサの位置情報(切替センサ基準位置)に基づいて鋼板のおおよその変位量を疑似変位量として求めるが、この疑似変位量は鋼板の実際の変位量と一致する可能性は低い。しかしながら、実際の変位量と疑似変位量との誤差は、通常は隣り合うセンサ同士の離間寸法より大きくなることはなく、実際の運用上において問題となり難い。この点に着目し、本発明者は、疑似変位量を積極的に利用して鋼板補正目標位置算出手段により所期の湾曲形状となるように各電磁石対を構成する電磁石間における鋼板の補正目標位置を演算して求め、鋼板補正目標位置算出手段で演算処理により求めた補正目標位置に基づいて、電流量制御手段で各電磁石に流す電流を個別に調整する構成を想到するに至った。このような構成を採用することによって、上位コンピュータなどの外部から制御部に対して鋼板の実際の変位量(蛇行量)に関する情報が入力されない使用環境下であっても、各電磁石対における鋼板の位置を補正目標位置へ移動させることが可能となり、鋼板が蛇行した場合であっても蛇行した位置において鋼板を所期の湾曲形状と同じ乃至略同じ湾曲形状に誘導(矯正)することができる。したがって、所期の湾曲形状で走行する鋼板に対して適切な制振作用を発揮する本発明の電磁制振装置であれば、蛇行した鋼板に対してもその蛇行した位置において鋼板を所期の湾曲形状に保つことにより、蛇行して走行する鋼板の振動も適切に抑制することができる。
【0014】
また、本発明の電磁制振装置では、幅方向に変位する前の時点における鋼板の湾曲形状、つまり鋼板の所期の湾曲形状を隣接する各電磁石対における鋼板の所期目標位置間を結ぶ直線で近似し、鋼板補正目標位置算出手段を、電磁石対毎に、鋼板の補正目標位置を求める対象の電磁石対及びその電磁石対に隣接する電磁石対における鋼板の各所期目標位置と疑似変位量と隣接する電磁石対間の距離とを利用して鋼板の補正目標位置を算出するものに構成することができる。ここで、「各電磁石対における鋼板の所期目標位置」とは、蛇行していない状態で所期の湾曲形状となるように電磁石対毎に予め又はリアルタイムで設定される鋼板の目標位置である。「各電磁石対における鋼板の所期目標位置」の具体的な例としては、電磁石対を鋼板の幅方向に所定ピッチで5つ配置し、中央の電磁石対と蛇行していない鋼板の幅方向中心とを一致ないし略一致させた電磁制振装置で左右対称な部分円弧形状の鋼板を搬送する場合、両エンド(両端)の電磁石対における鋼板の所期目標位置は各電磁石を構成する電磁石が対向する方向に一致ないし略一致し、両エンドの電磁石対に隣接する電磁石対(一方のエンド側から順に第1電磁石対、第2電磁石対、第3電磁石対、第4電磁石対、第5電磁石対とすれば第2電磁石対と第4電磁石対)における鋼板の所期目標位置が各電磁石対を構成する電磁石が対向する方向に一致ないし略一致する。
【0015】
本発明では、鋼板の所期湾曲形状を隣接する各電磁石対における鋼板の所期目標位置同士を直線で結んだ形状に近似し、鋼板が蛇行した場合であっても直線で近似した鋼板の形状を鋼板の幅方向に平行移動させた状態で保持すれば蛇行した位置においても鋼板が所期の湾曲形状と同一ないし略同一形状になるとの技術的思想に基づき、鋼板補正目標位置算出手段で、各電磁石対における鋼板の所期目標位置と、隣接する電磁石対間の距離と、鋼板の疑似蛇行量とを利用して各電磁石対における鋼板の補正目標位置をそれぞれ算出することができるようにしている。このような態様であれば、予め設定された既定値である「各電磁石対における鋼板の所期目標位置」及び「隣接する電磁石対間の距離」に加えて、リアルタイム又は所定時間毎に算出する「鋼板の疑似変位量」を利用するのみで鋼板補正目標位置算出手段によって少ない計算量で各電磁石対における鋼板の補正目標位置を求めることができる。
【0016】
鋼板補正目標位置算出手段における演算処理の好適な一例としては、鋼板の補正目標位置を求める対象の電磁石対(以下、「補正目標位置算出対象電磁石対」と称す)における鋼板の所期目標位置、及び補正目標位置算出対象電磁石対に隣接する電磁石対における鋼板の所期目標位置をそれぞれ共通の平面上における座標として求め、これら座標の差、より具体的には電磁石対を構成する電磁石の対向方向の沿った座標の差を算出するとともに、補正目標位置算出対象電磁石対における鋼板の補正目標位置と補正目標位置算出対象電磁石対に隣接する電磁石対における鋼板の所期目標位置との差を算出し、これら2つの算出結果である差の比である第1相対比が、隣接する電磁石対間の離間距離と、この離間距離から鋼板の疑似変位量を差し引いて算出した値との比である第2相対比に等しいことを利用して、各電磁石対における鋼板の補正目標位置をそれぞれ求める演算処理が挙げられる。
【0017】
また、本発明の電磁制振装置では、電流量制御手段が「電流量制御」として電流の出力強度を制御するものであってもよいが、簡単な制御仕様とする場合には、電磁石を励磁状態と無励磁状態との間でのみ切り替えること(電流のオン・オフ)によって各電磁石からの出力電流量をゼロかゼロ以上の所定値の何れかに設定するようにする態様を採用することが好ましい。
【0018】
また、本発明の電磁制振制御プログラムは、上述した構成をなす電磁制振装置に適用されるプログラムであり、幅方向に蛇行していない正規状態における鋼板の幅方向中央位置である鋼板中央位置から、電磁石対の電磁石間に鋼板の存在を検出したオン状態から電磁石対の電磁石間に鋼板の存在を検出しないオフ状態に切り替わったセンサのうち電磁石対領域の幅方向中央部に最も近いセンサの位置、又はオフ状態からオン状態に切り替わった前記センサのうち電磁石対領域の幅方向中央部から最も遠いセンサの位置の少なくとも何れか一方に基づく切替センサ基準位置までの距離と、鋼板の幅寸法の半分の長さとの差を鋼板の疑似変位量として算出する疑似変位量算出ステップと、前記疑似変位量算出ステップで算出した疑似変位量に基づいて、所期の湾曲形状となるように各電磁石対を構成する電磁石間における鋼板の補正目標位置を算出する鋼板補正目標位置算出ステップと、幅方向へ変位した鋼板を鋼板補正目標位置算出ステップで求めた各電磁石対における鋼板の補正目標位置へ移動させるように各電磁石対を構成する電磁石に流す電流量を個別に制御する電流量制御ステップとを経ることを特徴としている。このような電磁制振制御プログラムであれば蛇行して走行する鋼板の湾曲形状を所期の湾曲形状に維持した状態で搬送することができ、走行中の振動を効果的に抑制することができる。
【発明の効果】
【0019】
本発明の電磁制振装置によれば、上位コンピュータから鋼板の蛇行量が提供されない使用環境下であっても、専用のエッジ位置検出センサや蛇行量検出機器を必須の構造とすることなく、所期の湾曲形状で蛇行せずに走行する鋼板の振動を抑制することができるとともに、湾曲形状のまま蛇行して走行する鋼板の振動も効果的に抑制することができる。
【図面の簡単な説明】
【0020】
【図1】本発明の一実施形態に係る電磁制振装置の全体構成模式図。
【図2】図1のa方向模式矢視図。
【図3】図1のb方向模式矢視図。
【図4】同実施形態に係る電磁制振装置における制御部の機能ブロック図。
【図5】図3の一部拡大図。
【図6】図3に示す鋼板の湾曲形状を直線で近似した状態を示す図。
【図7】蛇行前後における隣接の電磁石間における鋼板の湾曲形状を近似した直線を一辺とする直角三角形を示す図。
【図8】蛇行後に所期目標位置に基づいて制振制御した場合の鋼板の形状を図3に対応させて示す図。
【図9】同実施形態に係る電磁制振装置に用いる電磁制振制御プログラムのフローチャート。
【図10】蛇行後に補正目標位置に基づいて制振制御した場合の鋼板の形状を図3に対応させて示す図。
【図11】同実施形態における疑似変位量を算出する際の概念図。
【図12】同実施形態における疑似変位量を算出する際の概念図。
【図13】同実施形態における疑似変位量を算出する際の概念図。
【図14】同実施形態における疑似変位量を算出する際の概念図。
【発明を実施するための形態】
【0021】
以下、本発明の一実施形態を、図面を参照して説明する。
【0022】
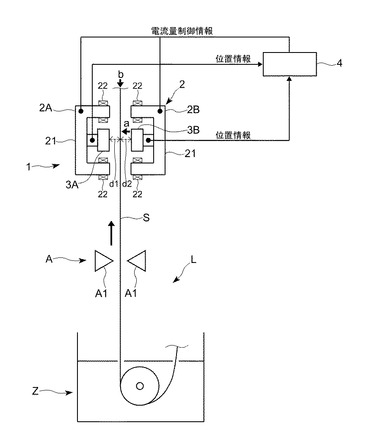
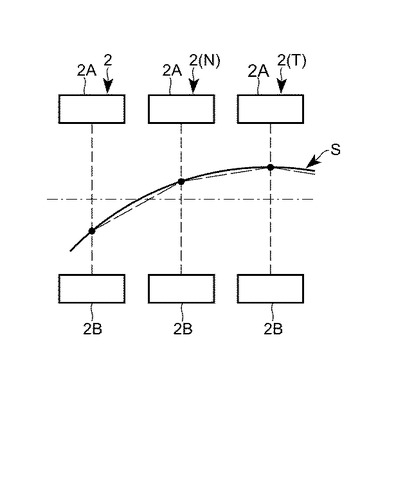
本実施形態に係る電磁制振装置1は、図1に示すように、連続メッキ鋼板ラインLにおいて、溶融金属槽(実施形態では溶融亜鉛槽Zを適用)よりも下流側に配設され、溶融亜鉛槽Zを通過して引き上げられながら走行する鋼板Sの振動を抑制するものである。なお、図1では鋼板Sを側面から見た状態を模式的に示し、図2では図1のa方向矢視図を模式的に示している。また、図3は、走行している鋼板Sを上方(図1のb方向)から見た状態を模式的に示す図である。なお、図1では鋼板Sを便宜的に1本の実線で表しているが、本実施形態に係る電磁制振装置1は、図3に示すように厚み方向に湾曲した形状で所定方向に走行する鋼板Sに対して制振作用を発揮し得るものである。特に、本実施形態の電磁制振装置1は、図3に示すように部分円弧状(部分楕円弧状)に湾曲した鋼板Sに対して安定した制振作用を発揮し得るものである。
【0023】
連続メッキ鋼板ラインL(特に溶融亜鉛を用いるメッキ鋼板ラインは「連続溶融亜鉛メッキライン」(CGL;Continuous Galvanizing Line)と称される)は、溶融亜鉛槽Zと電磁制振装置1との間に、噴出口を鋼板Sに向けたノズルA1を備えたエアーナイフ部Aを設け、溶融亜鉛槽Zを通過して引き上げられながら走行する鋼板Sに対して各ノズルA1の噴出口から加圧空気又は加圧ガスを噴出させることによって過剰な溶融亜鉛を吹き落とすようにしている。溶融亜鉛槽Z及びエアーナイフ部Aは既知のものを適用することができ、詳細な説明は省略する。
【0024】
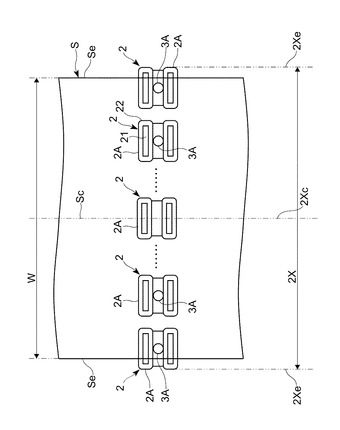
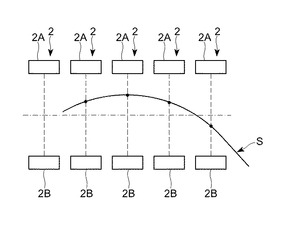
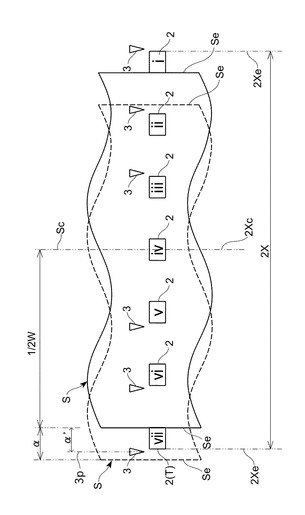
電磁制振装置1は、図2及び図3に示すように、鋼板Sを厚み方向に挟み得る位置に対向配置した第1電磁石2A及び第2電磁石2Bの組である電磁石対2を鋼板Sの幅方向に所定ピッチで複数(図2では5つ以上の電磁石対2、図3では説明の便宜上5つの電磁石対2)配置したものである。なお、図2では、実際には手前側鋼板Sを破線で示している。各電磁石対2を構成する第1電磁石2A、第2電磁石2Bは、それぞれ断面コ字形状ないし略コ字形状をなす鉄心21と、鉄心21の各脚部に巻回されたコイル22とから構成され、コイル22に給電するか否かによって鉄心21から磁気吸引力を出力可能な励磁状態と、鉄心21から磁気吸引力を出力しない無励磁状態との間で切替可能な既知のものである。本実施形態では、複数の電磁石対2を鋼板Sの幅方向に所定ピッチで配設しており、鋼板Sが蛇行せずに正常な姿勢(以下、「正常姿勢」と称す)で電磁石対領域2Xを走行する場合、図2に示すように、鋼板Sの幅方向中央Scは複数の電磁石対2を配設した領域(電磁石対領域)2Xの幅方向中央2Xcと一致しており、また、電磁石対領域2Xに電磁石対2を幅方向に3以上の奇数組配設した場合、真ん中に配設した電磁石対2の幅方向中央と電磁石対領域2Xの幅方向中央2Xcとを一致させている。なお、図3では、各電磁石対2における幅方向中央を破線で示し、第1電磁石2Aと第2電磁石2Bとの中間を一点鎖線で示している。
【0025】
また、電磁制振装置1には、各第1電磁石2A、各第2電磁石2Bのうち鋼板Sに対向する面に鋼板Sまでの距離を検出する第1センサ3A、3B及び第2センサ3A、3Bを設けている。本実施形態では、例えば渦電流式のセンサ3A、3Bを適用し、これらセンサ3A、3Bを各電磁石2A、2Bの凹部(鉄心21の脚部に挟まれ得る位置)に配置している。第1センサ3A、3B及び第2センサ3A、3Bは、検出面をそれぞれ対応する各電磁石2A、2Bの磁極面と同一面又はほぼ同一面に設定され、鋼板Sを挟んで対向する位置に設けられている。第1センサ3A及び第2センサ3Bは、鋼板Sまでの距離d1、d2を検出し、それぞれの検出結果を検出信号として制御部4に出力するものである。なお、本実施形態では、センサ3A、3Bの検出面全体が鋼板Sによって完全ないし略完全に覆われた状態でのみ、センサ3A、3Bが鋼板Sまでの距離を検出できるように設定している。各電磁石対2には一対のセンサ3A,3Bが対応付けられており、以下の説明では1つの電磁石対2に対応付けて設けた一対のセンサ3A,3Bを総称して単に「センサ3」と称する場合がある。ここで、図2に示すように、センサ3の中心(検知ポイント)を電磁石対2の幅方向中央2cに一致または略一致させたレイアウトを採用したり、図5に示すように、センサ3の中心(検知ポイント)を各電磁石対2の端部、より具体的には電磁石対2のうち電磁石対領域2Xの幅方向中央部2Xcから相対的に遠い方の端部と一致または略一致させたレイアウトを採用することもできる。また、図2及び図5に示すように、全ての電磁石対2のうち、電磁石対領域2Xの幅方向中央部2Xcに配置された電磁石対2(図5で「iv」を付した電磁石対2)にはセンサ3を設けていない。これは、電磁石対領域2Xの幅方向中央部2Xcに配置された電磁石対2を鋼板Sのエッジ位置が通過する程度までに鋼板Sが蛇行することは想定し難いからである。なお、電磁石対領域2Xの幅方向中央部2Xcに配置された電磁石対2にもセンサ3を設け、このセンサ3が電磁石対2の電磁石2A,2B間に鋼板Sの存在を検出したオン状態から電磁石対2の電磁石間2A,2Bに鋼板Sの存在を検出しないオフ状態に切り替わった時点で異常事態発生と判断して電磁制振装置1を強制停止するように構成してもよい。図2では正規状態の鋼板Sを破線で示している。
【0026】
本実施形態に係る電磁制振装置1は、各電磁石対2の電磁石2A、2Bに電気的に接続されてこれら各電磁石2A、2Bに流す電流量に基づく各電磁石2A、2Bの磁気吸引力を制御する制御部4を備え、第1電磁石2Aと第2電磁石2Bとの対向方向に所期の湾曲形状で各電磁石対2の電磁石2A、2B間を走行する鋼板Sの振動を制御部4によって抑制することができるように構成されている。ここで、本実施形態では、鋼板Sの所期湾曲形状として、鋼板Sの幅方向中央を中心に左右対称な部分円弧状(部分楕円形状)を採用している。そして、鋼板Sが所期の湾曲形状となるように、制御部4には各電磁石対2における鋼板Sの目標位置(所期目標位置:図3で塗りつぶした黒丸で示す位置)が入力され、鋼板Sが蛇行していない場合には、この各電磁石対2における鋼板Sの相対位置が所期目標位置となるように、各電磁石2A、2Bに流す電流を制御部4によって制御している。
【0027】
制御部4は、各センサ3A、3Bにも電気的にも接続されている点、及び各センサ3A、3Bで検出した鋼板Sの位置情報に基づいて鋼板Sの振動を抑制するように各電磁石2A、2Bの磁気吸引力を制御するものである点は周知の電磁制振装置と同様であるが、以下の点で本実施形態に係る電磁制振装置1は周知の電磁制振装置と異なる。
【0028】
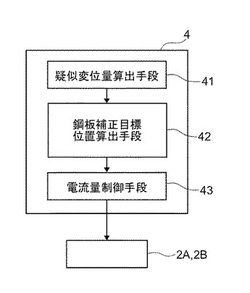
すなわち、本実施形態の電磁制振装置1における制御部4は、図4に示すように、鋼板Sが幅方向へ変位した場合において、少なくともリアルタイム又は所定時間毎に鋼板Sの移送中にオン状態とオフ状態との間で切り替わったセンサ3の位置を利用して鋼板Sの幅方向への疑似的な変位量(蛇行量)である疑似変更量α’を算出する疑似変位量算出手段41と、算出した疑似変位量α’(疑似蛇行量)に基づき所期の湾曲形状となるように各電磁石対2における鋼板Sの補正目標位置を算出する鋼板補正目標位置算出手段42と、蛇行した鋼板Sを鋼板補正目標位置算出手段42で求めた鋼板Sの補正目標位置へ移動させるように各電磁石対2を構成する電磁石2A、2Bに流す電流量を個別に制御する電流量制御手段43とを備えている。なお、制御部4には、電磁制振装置1に電気的に接続された上位コンピュータ(図示省略)からラインL側の情報、つまり走行する鋼板Sに関する情報である板厚、板幅、鋼種、張力等が入力されるように構成している。
【0029】
疑似変位量算出手段41は、幅方向に蛇行していない正規状態における鋼板Sの幅方向中央位置である鋼板中央位置Scから、オン状態からオフ状態に切り替わったセンサ3のうち電磁石対領域2Xの幅方向中央部2Xcに最も近いセンサ(最内側のセンサ)の位置、又はオフ状態からオン状態に切り替わったセンサ3のうち電磁石対領域2Xの幅方向中央部2Xcに最も遠いセンサ(最外側のセンサ)の位置の少なくとも何れか一方である「切替センサ基準位置3p」までの距離と、鋼板Sの幅寸法の半分の長さとの差を鋼板Sの疑似変位量α’として算出する。ここで、疑似変位量算出手段42は、鋼板中央位置Scから切替センサ基準位置3pまでの距離(仮蛇行幅)を算出する第1次算出部と、第1次算出部で算出した仮蛇行幅と鋼板Sの幅寸法の半分の長さとの差を算出する第2次算出部とによって鋼板Sの疑似変位量α’を算出するものと捉えることができる。
【0030】
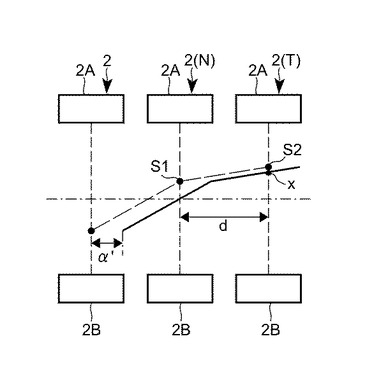
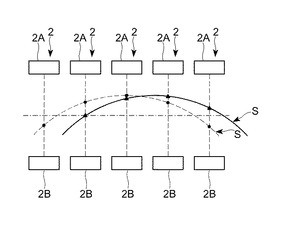
鋼板補正目標位置算出手段42は、上述した鋼板Sの疑似変位量α’に加えて、蛇行していない状態で所期の湾曲形状となるように電磁石対2毎に予め又はリアルタイムで設定される鋼板Sの目標位置である所期目標位置(所期目標位置情報)と、隣接する電磁石対2間の距離(より具体的には各電磁石対2の幅方向中央同士の距離、以下「電磁石対間距離(電磁石対間距離情報)」と称す)とを利用して電磁石対2毎に各電磁石対2における鋼板Sの補正目標位置を算出するものである。本実施形態の電磁制振装置1は、図3の一部拡大図である図5及び図6に示すように、幅方向に変位せずに正常姿勢で電磁石対領域2Xを走行する鋼板Sの湾曲形状、つまり蛇行する前の鋼板Sの湾曲形状である所期湾曲形状を、隣り合う電磁石対2における鋼板Sの所期目標位置同士を直線で結んだ折れ線形状(鋼板Sの所期目標位置を順に線分で結んだ折れ線:図5及び図6において破線で示す)で近似し、鋼板Sが蛇行した場合であっても図6において実線で示すように、近似した鋼板Sの形状を電磁石対領域2Xの幅方向に平行移動させて保持すれば蛇行した位置において鋼板Sが所期湾曲形状と同一ないし略同一形状になるとの技術的思想に基づき、鋼板補正目標位置算出手段42により、各電磁石対2における鋼板Sの補正目標位置を、隣り合う電磁石対2における鋼板Sの各所期目標位置、鋼板Sの蛇行量、電磁石対間距離を利用して演算して求めるものである。
【0031】
このように、鋼板補正目標位置算出手段42は、電磁石対2毎の鋼板Sの所期目標位置を隣り合った電磁石対2間で直線補間(線形補間)し、電磁石対間距離及び鋼板Sの疑似変位量α’を利用して、蛇行した鋼板Sの補正目標位置を演算により導き出すものである。なお、隣接する電磁石対2間の距離は予め定められており、制御部4に「電磁石間距離情報」として入力されている。また、制御部4は、疑似変位量算出手段41で疑似変位量α’を算出するタイミングや鋼板補正目標位置算出手段42で補正目標位置を算出するタイミングはリアルタイム又は所定時間毎など適宜に設定することができる。
【0032】
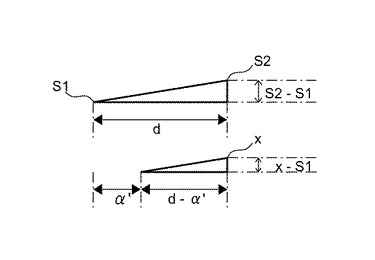
そして、図6及び図7(図7は図6の一部であり、後述する相似関係にある2つの直角三角形をそれぞれ個別に示したものである)に示すように、幅方向へ変位した後(蛇行後)の鋼板Sの補正目標位置「x」を求める対象の電磁石対2(T)(以下、「補正目標位置算出対象電磁石対2(T)」と称す)における鋼板Sの所期目標位置「S2」、この補正目標位置算出対象電磁石対2(T)に隣接する電磁石対2(N)における鋼板Sの所期目標位置「S1」とし、各所期目標位置S1、S2を共通のxy平面上の座標として求めた場合のy軸方向(第1電磁石2Aと第2電磁石2Bとが対向する方向)の座標の差「S2−S1」として示すことができる線分と、x軸方向に隣り合う電磁石対2(T)、2(N)の離間距離である電磁石対間距離「d」として示すことができる線分と、各電磁石2(T)、2(N)における鋼板Sの所期目標位置S2、S1同士を結ぶ線分とによって形成される直角三角形(図7の紙面上側の直角三角形)が、補正目標位置算出対象電磁石対2(T)における鋼板Sの補正目標位置「x」と電磁石対2(N)における鋼板Sの所期目標位置「S1」とを共通のxy平面上の座標として求めた場合のy軸方向の差「x−S1」として示すことができる線分と、電磁石対間距離「d」と鋼板Sの疑似変位量「α’」との差「d−α’」で示すことができるx軸方向の線分と、鋼板Sの補正目標位置「x」から鋼板Sの所期目標位置S2、S1同士を結ぶ直線と平行に延びる線分とによって形成される直角三角形(図7の紙面下側の直角三角形)と相似関係にあることを利用して、本実施形態の電磁制振装置1は、制御部4の鋼板補正目標位置算出手段42で以下の演算処理を行う。
【0033】
具体的に、本実施形態の鋼板補正目標位置算出手段42は、各所期目標位置S1、S2を共通のxy平面上の座標として求めた場合のy軸方向(第1電磁石2Aと第2電磁石2Bとが対向する方向)の座標の差「S2−S1」と、鋼板Sの補正目標位置「x」と電磁石対2(N)における鋼板Sの所期目標位置「S1」を共通のxy平面上の座標として求めた場合のy軸方向の差「x−S1」、これら2つの比である第1相対比「(S2−S1):(x−S1)」が、電磁石対間距離「d」と、この電磁石対間距離「d」と鋼板Sの疑似変位量(疑似蛇行量)「α’」との差「d−α’」、これら2つの比である第2相対比「d:(d−α’)」に等しいことを利用して補正目標位置算出対象電磁石対2(T)における鋼板Sの補正目標位置「x」を求める。つまり、鋼板補正目標位置算出手段42は、第1相対比「(S2−S1):(x−S1)」と第2相対比「d:(d−α’)」とを等式で結ぶ数式、すなわち「(S2−S1):(x−S1)=d:(d−α’)」から、補正目標位置算出対象電磁石対2(T)における鋼板Sの補正目標位置「x」を演算して求めるものである。上記数式「(S2−S1):(x−S1)=d:(d−α’)」を、「x」を求める数式に展開すると、「x=((S2−S1)(d−α’)/d)+S1」となり、「S2」、「S1」、「d」及び「α’」にそれぞれ制御部4に入力された隣接する電磁石対2における鋼板Sの所期目標位置情報、電磁石対間距離情報、鋼板Sの疑似変位量情報に基づく数値を代入することにより、補正目標位置算出対象電磁石対2(T)における鋼板Sの補正目標位置「x」を求めることができる。本実施形態では、このような演算処理により鋼板補正目標位置算出手段42で各電磁石対2における鋼板Sの補正目標位置「x」を数値としてそれぞれ求める。
【0034】
電流量制御手段43は、各電磁石対2における鋼板Sの目標位置を所期目標位置から鋼板補正目標位置算出手段42で求めた補正目標位置「x」に一時的に置き換え、各電磁石対2における鋼板Sの位置が所期目標位置から補正目標位置に移動するようにそれぞれの電磁石対2を構成する電磁石2A、2Bを励磁状態または無励磁状態にする。なお、疑似変位量情報に基づいて第1電磁石2Aと第2電磁石2Bとの間に鋼板Sが存在しない電磁石対2であると判別した場合、この電磁石対2を構成する電磁石2A、2B及び各センサ3A、3Bを駆動させない状態にしてもよい。
【0035】
なお、制御部4は、図示しないが、各センサ3A、3Bからの出力信号が入力されるコントローラと、制御ゲインに関する指令等をコントローラに出力するシーケンサと、コントローラが出力した各電磁石2A、2Bに流す電流に関する指令(電流量制御情報)に基づいて各電磁石2A、2Bにそれぞれ電流を供給する第1アンプ、第2アンプとを備えたものであるが、これらコントローラ、シーケンサ、各アンプの詳細な説明は省略する。
【0036】
次に、このような構成を有する電磁制振装置1の使用方法及び作用について説明する。
【0037】
まず、電磁制振装置1を起動すると、各電磁石対2における鋼板Sの所期目標位置情報及び電磁石間距離情報が制御部4に入力され、制御部4が各電磁石対2における鋼板Sの所期目標位置情報に基づき各電磁石2A、2Bの電流量を制御することにより、図1及び図3に示すように、溶融亜鉛槽Zを通過して引き上げられながら蛇行せずに走行する鋼板Sを所期の湾曲形状に保持したままその振動を抑制することができる。
【0038】
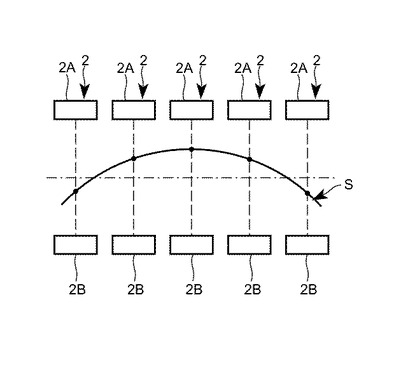
ところで走行中の鋼板Sが蛇行した際においても、制御部4が各電磁石対2における鋼板Sの所期目標位置情報に基づき各電磁石2A、2Bの電流量を制御し続けた場合、つまり、各電磁石対2における鋼板Sの目標位置を所期目標位置に維持し続けた場合には、図8に示すように、鋼板Sが所期の湾曲形状とは異なる形状に変形し、鋼板Sに対する適切な制振作用を発揮することができないおそれがある。
【0039】
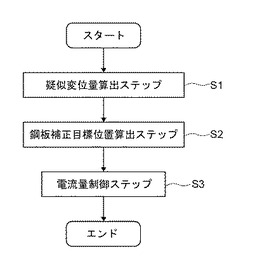
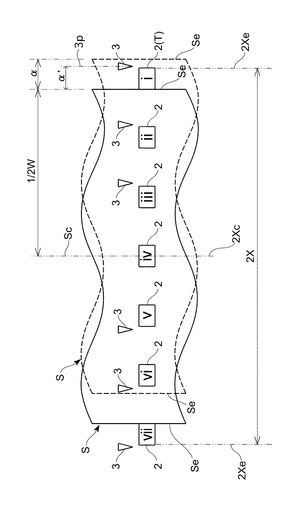
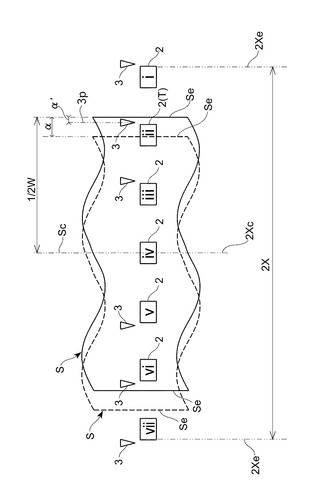
そこで、本実施形態の電磁制振装置1では、リアルタイムまたは所定時間毎に、本実施形態に係る電磁制振制御プログラムが実行して以下のように各部を作動させている。すなわち、制御部4の疑似変位量算出手段41により走行する鋼板Sの疑似変位量α’を算出(疑似変位量算出ステップS1;図9参照)する。具体的には、図11及び図12に示すように、正規状態では電磁石対領域2Xの幅方向両エンド(端部)2Xeの電磁石対2(図11及び図12に示す電磁石対「i」,「vii」)に付帯させたセンサ3がオフ状態となる幅寸法の鋼板Sが、電磁石対領域2Xの幅方向の一方のエンド側(図11では紙面左側、図12では紙面右側)に蛇行し、当該一方のエンド側2Xeに配置した電磁石対2に付帯させたセンサ3(図11では左端の電磁石対「vii」に付帯させたセンサ3、図12では右端の電磁石対「i」に付帯させたセンサ3)のみがオフ状態からオン状態に切り替わった場合、疑似変位量算出部41では、以下の手順で疑似変位量α’を算出する。つまり、オフ状態からオン状態に切り替わったセンサ3のうち、電磁石対領域2Xの幅方向中央部2Xcから最も遠いセンサ3(最外側のセンサ3)の位置を切替センサ基準位置3pとし、切替センサ基準位置3pから鋼板中央位置Scまでの距離を算出し、その距離と鋼板Sの幅寸法の半分の長さとの差を算出し、その算出値を疑似変位量α’とする。ここで、図11及び図12に示すように、鋼板Sの蛇行によりオン状態からオフ状態に切り替わるセンサ3が無い場合には、上述したオフ状態からオン状態に切り替わったセンサ(電磁石対viiに付帯させたセンサ3、又は電磁石対iに付帯させたセンサ3)のみに着目して疑似変位量α’を求めることができる。このような場合、つまり、鋼板Sが蛇行してオフ状態からオン状態に切り替わったセンサ3のみに着目して疑似変位量α’を求める場合の式は「(鋼板中央位置Scから切替センサ基準位置3pまでの距離)−鋼板Sの幅寸法の半分」となる。
【0040】
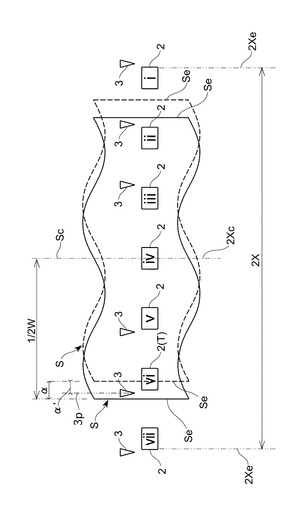
また、図13及び図14に示すように、例えば正規状態では電磁石対領域2Xの幅方向両エンド2Xcの電磁石対2(図13及び図14に示す電磁石対「i」,「vii」)に付帯させたセンサ3がオフ状態となる幅寸法であって且つ図11及び図12に示す鋼板Sよりも幅寸法が小さい鋼板Sが、電磁石対配置領域2Xの何れか一方のエンド2Xe側(図13では紙面左側、図14では紙面右側)に蛇行し、他方のエンド側に配置した電磁石対2に付帯させたセンサ3(図13では右から2番目の電磁石対「vi」に付帯させたセンサ3、図14では左から2番目の電磁石対「ii」に付帯させたセンサ3)がオン状態からオフ状態に切り替わった場合、疑似変位量算出部41では、以下の手順で疑似変位量α’を算出する。つまり、オン状態からオフ状態に切り替わったセンサ3のうち、電磁石対領域2Xの幅方向中央部2Xcに最も近いセンサ3(最内側のセンサ3)の位置を切替センサ基準位置3pとし、切替センサ基準位置3pからから鋼板中央位置Scまでの距離を算出し、その距離と鋼板Sの幅寸法の半分の長さとの差を算出し、その算出値を疑似変位量α’とする。ここで、図13及び図14に示すように、鋼板Sの蛇行によりオフ状態からオン状態に切り替わるセンサ3が無い場合には、上述したオン状態からオフ状態に切り替わったセンサ3(図13では右から2番目の電磁石対「vi」に付帯させたセンサ3、図14では左から2番目の電磁石対「ii」に付帯させたセンサ3)のみに着目して疑似変位量α’を求めることができる。このような場合、つまり、鋼板Sが蛇行してオン状態からオフ状態に切り替わったセンサ3のみに着目して疑似変位量α’を求める場合の式は「鋼板Sの幅寸法の半分−(鋼板中央位置Scから切替センサ基準位置3pまでの距離)」となる。なお、図11乃至図14では、正規状態の鋼板Sを実線で示し、蛇行した鋼板Sを破線で示している。
【0041】
次いで、本実施形態に係る電磁制振装置1は、疑似変位量算出手段41により演算して求めた疑似変位量α’に基づいて鋼板Sが蛇行していると判別した場合には、制御部4がこれら鋼板Sの蛇行量情報、各電磁石対2における鋼板Sの所期目標位置情報、及び電磁石間距離情報に基づいて各電磁石対2における鋼板Sの補正目標位置xを補正目標位置算出手段42で演算して求める(鋼板補正目標位置算出ステップS2;図9参照)。具体的には、補正目標位置算出手段42において、上述した数式「x=((S2−S1)(d−α’)/d)+S1」を用いて、「S2」、「S1」、「d」及び「α’」にそれぞれ制御部4に入力された鋼板Sの所期目標位置情報、電磁石対間距離情報、鋼板Sの蛇行量情報に基づく数値を代入して、各電磁石対2(T)における鋼板Sの補正目標位置「x」を求める。
【0042】
次いで、制御部4は、各電磁石対2における鋼板Sの目標位置を定める制御データとして、所期目標位置に代えて補正目標位置算出手段42により鋼板補正目標位置算出ステップS2で演算して求めた補正目標位置「x」に基づき、各電磁石対2に対する蛇行して走行する鋼板Sの位置がそれぞれ補正目標位置に移動するように電磁石2A、2Bに流す電流量を電流量制御手段43により個別に制御する(電流量制御ステップS3;図9参照)。なお、本実施形態の電磁制振装置Xは、各電磁石対2を構成する第1電磁石2A、第2電磁石2Bをそれぞれ個別に励磁状態又は無励磁状態にする電流量情報を制御部4から各電磁石2A、2Bに出力する。その結果、本実施形態の電磁制振装置1は、鋼板Sを図10の実線で示すように蛇行した位置において所期の湾曲形状に保つことができ、この所期湾曲形状で走行する鋼板Sに対して適切な制振作用を発揮することができる。なお、図10では、所期の湾曲形状で蛇行せずに正常姿勢で走行する鋼板Sを破線で示している。
【0043】
このようにして本実施形態の電磁制振装置1は、湾曲形状で走行する鋼板Sが蛇行した場合に、蛇行した位置において鋼板Sを所期の湾曲形状に保ったまま制振制御を行うことができる。
【0044】
なお、本実施形態の電磁制振装置1では、溶融亜鉛槽Zを通過して引き上げられながら走行する鋼板Sが各電磁石対2においてどの位置に存在するかという情報を第1センサ3A及び第2センサ3Bによって検出できるようにしており、これらセンサ3A、3Bからの検出情報(位置情報)が制御部4にリアルタイム又は所定時間毎に入力されるように構成している。そして、制御部4が、これらの検出情報(位置情報)及び補正目標位置情報に基づいて、第1電磁石2A、第2電磁石2Bを励磁状態にする電流量制御情報または無励磁状態にする電流量制御情報を各電磁石2A、2Bに出力し、各電磁石2A、2Bに流す電流を制御する。その結果、鋼板Sは、蛇行せずに走行する場合のみならず蛇行した場合であっても各電磁石2A、2Bの磁気吸引力により所期の湾曲形状と同じ乃至略同じ湾曲形状に保たれ、走行中の振動が抑制される。
【0045】
したがって、溶融亜鉛槽Zを通過して引き上げられながら走行する鋼板Sを厚み方向に湾曲させることによって鋼板Sの剛性を維持しつつ、このような湾曲形状の鋼板Sとエアーナイフ部Aを構成する各ノズルA1における噴出口との距離を予め想定している一定範囲内に維持することができ、鋼板Sに作用する噴射力の変動を防止し、均一又はほぼ均一なメッキ厚みにすることができる。
【0046】
このように、本実施形態に係る電磁制振装置1では、電磁石対2に付帯させたセンサ3のうちオン状態からオフ状態に切り替わったセンサ3のうち最外側のセンサ3の位置、またはオフ状態からオン状態に切り替わったセンサ3のうち最内側のセンサ3の位置を切替センサ基準位置3pとし、この切替センサ基準位置3pに基づいて鋼板Sの疑似変位量α’を演算して求める疑似変位量算出手段41と、疑似変位量算出手段41で算出した鋼板Sの疑似変位量α’に基づいて各電磁石対2における鋼板Sの補正目標位置xを演算して求める鋼板補正目標位置算出手段42と、蛇行した鋼板Sを鋼板補正目標位置算出手段42で求めた鋼板Sの補正目標位置xへ移動させるように電磁石2A、2Bに流す電流量を個別に制御する電流量制御手段43とを備えた制御部4を用いている。ここで、疑似変位量算出手段41で求める疑似変位量α’は実際の鋼板Sの変位量αとは異なり得るが、その誤差は最大でも電磁石対領域2Xの幅方向に隣り合う電磁石対2同士の離間寸法程度であり、具体的には隣り合う電磁石対2にそれぞれ付帯させたセンサ3の検知ポイント同士の距離程度であり、実際の運用上では問題になり難い誤差である。したがって、このような実際の運用上において許容範囲内の誤差である疑似変位量α’を鋼板Sの厚み方向の位置情報(鋼板Sの振動情報)を検出するセンサ3を利用して算出することができ、この疑似変位量α’を用いて鋼板Sの目標補正位置xを算出するように構成した本実施形態に係る電磁制振装置1では、鋼板Sの厚み方向の位置情報(鋼板Sの振動情報)を検出するセンサ3とは別に鋼板Sのエッジ位置を検出するためのセンサや鋼板Sの蛇行量を直接検出可能な蛇行量検出機器を配置する必要が無く、鋼板補正目標位置算出手段42で求めた鋼板Sの目標補正位置情報に基づいて各電磁石2A,2Bを励磁状態にするか否かを適切且つ確実に制御し、湾曲形状で走行する鋼板Sが蛇行した場合であっても蛇行した位置で鋼板Sを所期の湾曲形状と同じ乃至略同じになるように誘導することができ、幅方向に蛇行した鋼板Sに対しても走行中の振動を適切に抑制することができる。その結果、所期の湾曲形状のまま正常姿勢で走行する鋼板Sは勿論のこと、幅方向に蛇行して走行する鋼板Sの振動をも効果的に抑制することができ、実用性に優れたものとなる。したがって、このような電磁制振装置1を、鋼板Sに付着した余剰な溶融金属を吹き飛ばすエアーナイフ部Aとともに連続メッキ鋼板ラインLに配設した場合には、この電磁制振装置1によって、所期の湾曲形状のまま又は所期の湾曲形状に一致ないし略一致する湾曲形状で走行する鋼板Sの振動を効果的に抑制することができ、その結果、鋼板Sとエアーナイフ部Aとの距離を想定している一定範囲内に維持することが可能になり、鋼板Sに作用する噴射力の変動を防止し、均一又はほぼ均一なメッキ厚みにすることができる。
【0047】
また、本実施形態に係る電磁制振プログラムは、電磁石対2に付帯させたセンサ3の位置情報を利用して求めた疑似変位量α’を疑似変位量算出ステップS1と、疑似変位量算出ステップS1で求めた疑似変位量α’に基づいて、所期の湾曲形状となるように各電磁石対2における鋼板Sの補正目標位置xを演算して求める鋼板補正目標位置算出ステップS2と、蛇行した鋼板Sを鋼板補正目標位置算出ステップS2で求めた鋼板Sの補正目標位置xへ移動させるように電磁石2A、2Bに流す電流量を個別に制御する電流量制御ステップS3とを経るため、上述した通り、蛇行せずに正常姿勢で走行する鋼板S及び幅方向に蛇行して走行する鋼板Sの振動を適切に抑制することができる。
【0048】
なお、本発明は上述した実施形態に限定されるものではない。例えば、例えば、オン状態からオフ状態に切り替わったセンサと、オフ状態からオン状態に切り替わったセンサが両方存在する場合、疑似変位量算出部では、オン状態からオフ状態に切り替わったセンサのうち最内側のセンサの位置、オフ状態からオン状態に切り替わったセンサのうち最外側のセンサの位置、これら両方のセンサ位置を切替センサ基準位置としてそれぞれの疑似変位量を求め、その値を足して2で割った値(平均値)を疑似変位量として算出するように構成したり、何れか一方の切替センサ基準位置を優先的に利用して疑似変位量を算出するように構成することができる。
【0049】
また、各電磁石対に対するセンサの相対位置は適宜変更してもよく、センサの検出ポイントを電磁石対の幅方向中央部に一致させたり、電磁石対の幅方向中央部より幅方向エンド側へ変位させた位置に設定することができる。
【0050】
また、鋼板の所期湾曲形状として、上述した実施形態で示した部分円弧(部分楕円弧)状に代えて、複数の部分円弧を組み合わせた形状(波状、S字状)や、幅方向中央を中心に左右対称ではない湾曲形状を採用することができる。
【0051】
また、鋼板の所期目標位置及び電磁石間距離を制御部に対して出力する出力源は、電磁制振装置とは別の装置又は電磁制振装置の一部の何れであってもよい。
【0052】
また、電流量制御手段が電流出力オン・オフに加えて、あるいは電流出力のオン・オフに代えて、出力強度(電磁石に流す電流量の大小)を調整することにより電磁石の電流量を制御するものであっても構わない。特に、電流量制御手段を、電流出力のオン・オフの切替を制御するものではなく、電流出力をオフにする(電磁石を無励磁状態にする)ことなく出力強度を調整するものとする場合は、上述した実施形態における電流出力のオフ状態(電磁石の無励磁状態)の代わりに、電磁石対間の鋼板を電磁石の磁気吸引力によっては幅方向に移動させないか、もしくは移動させたとしても無視し得る程度の極小距離しか移動させない程度の微弱な電流を流すようにすることが望ましい。このような電流制御を行えば、電流出力のオン・オフ制御を行う態様と比較すると、鋼板を幅方向に移動させない状態でも常に微弱電流を出力することとなるため、鋼板を所望距離だけ幅方向に移動させるように電流出力を上昇させる際の応答性が向上し、鋼板の制振制御効率を高めることが可能となる。出力強度を調整することにより各電磁石の電流量を制御するものであっても構わない。
【0053】
また、鋼板の幅寸法を制御部に対して出力する出力源は、電磁制振装置とは別の装置又は電磁制振装置の一部の何れであってもよい。
【0054】
鋼板の幅方向に配置する電磁石対の数や、鋼板の幅方向に隣り合う電磁石対同士のピッチ(電磁石間距離情報の基になる数値)は適宜変更することができる。また、幅方向に隣り合う電磁石対同士のピッチを不均一に設定してもよい。この場合、電磁石対に付帯させるセンサ同士のピッチも不均一となり得るが、鋼板の実際の変位量(蛇行量)と疑似変位量との最大誤差は、最もピッチが大きいセンサ間の距離(具体的には最もピッチが大きい検出ポイント同士の離間距離)になる。また、電磁石対の数や電磁石対同士のピッチの変更に応じて電磁石対領域の幅寸法も適宜変えてもよい。
【0055】
また、上述した実施形態では全ての電磁石対のうち、電磁石対領域2Xの幅方向中央部2Xcに配置された電磁石対2(図11で「iv」を付した電磁石対2)にはセンサ3を付帯させていない態様を例示したが、この電磁石対2「iv」に隣り合う電磁石対2「iii」,「v」を電磁石対領域2Xの幅方向中央部2Xc近傍に配置された電磁石対とし、これら電磁石対2にセンサ3を付帯させない態様を採用してもよい。さらに、電磁石対を電磁石対領域の幅方向に偶数配置した場合には、少なくとも電磁石対領域の幅方向中央部に近い2つの電磁石対にはセンサを付帯させなくてもよい。
【0056】
また、上述した実施形態では、溶融金属槽として溶融亜鉛槽を例示したが、これに代えて、例えば溶融した錫又はアルミニウム或いは樹脂塗料などを貯留した槽を適用しても構わない。本発明の電磁制振装置では、鋼板に対する表面被覆処理として、メッキ塗工処理の他、適宜の表面処理材料を鋼鈑に噴霧することによって表面被覆処理を施す表面カラーリング処理等、他の表面被覆処理を採用することができる。また、本発明の電磁制振装置は、表面被覆処理を施す前の時点において走行する鋼板の振動や、表面被覆処理を施すことなく所定方向に走行する鋼板の制振をも好適に抑制することができる。
【0057】
またさらに、本発明の電磁制振装置が、表面被覆処理を施した後に引き下げながら電磁石の間を通過するようにした鋼板の振動を抑制制御する装置であったり、表面被覆処理を施した後に水平に移動させながら電磁石の間を通過するようにした鋼板の振動を抑制制御する装置であっても構わない。また、上述した実施形態では、電磁石間を通過する鋼板の姿勢が鉛直の場合を示したが、本発明において鋼板は鉛直以外の姿勢、例えば水平姿勢、傾斜姿勢の何れかで電磁石間を通過させるようにすることもできる。
【0058】
その他、各部の具体的構成についても上記実施形態に限られるものではなく、本発明の趣旨を逸脱しない範囲で種々変形が可能である。
【符号の説明】
【0059】
1…電磁制振装置
2…電磁石対
2A、2B…電磁石
4…制御部
41…疑似変位量算出手段
42…鋼板補正目標位置算出手段
43…電流量制御手段
S…鋼板
【技術分野】
【0001】
本発明は、電磁石から出力する電流によって、搬送中の鋼板が振動することを防止・抑制可能な電磁制振装置、及びこのような電磁制振装置に適用可能な電磁制振制御プログラムに関するものである。
【背景技術】
【0002】
従来より、例えば連続溶融亜鉛メッキラインにおいて、溶融亜鉛槽を通過して引き上げられながら走行する鋼板に対して、エアーナイフ部(例えば空気ノズルを用いて構成したもの)から加圧空気又は加圧ガスを噴出させることによって過剰な溶融亜鉛を吹き落とし、所望のメッキ厚みにすることが行われている。このような場合、鋼板がエアーナイフ部に対して接離する方向に振動すれば、ノズルと鋼板との距離が変動し、その結果、鋼板が受ける圧力(噴射力)が変動してメッキの厚みが不均一となり、品質の劣化を招くことがある。
【0003】
そこで、走行する鋼板を挟む位置に対向配置した電磁石に流す電流を制御することにより、電磁石の吸引力を制御し、走行する鋼板の振動を低減する電磁制振装置が考えられている(例えば特許文献1)。この種の電磁制振装置は、鋼板の厚み方向に対向配置した電磁石を備えた電磁石対を鋼板の幅方向に複数配置し、さらに、鋼板との相対位置(距離)を検知する変位センサを各電磁石に関連付けて設け、各変位センサが検出する鋼板との相対位置(距離)に基づいて各電磁石対の電磁石に流す電流を制御するように構成されている。
【0004】
また、鋼板を幅方向に湾曲させた状態で搬送することにより、搬送中の鋼板自体の剛性を上げる試みもなされている。この場合、電磁制振装置による適切な制振制御が発揮され得る鋼板の湾曲形状は予め設定されており、電磁制振装置では、鋼板が所期の湾曲形状となるように各電磁石対を構成する電磁石の出力電流を制御している。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2009−179834号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
ところで、対向する電磁石間を走行する鋼板は幅方向に蛇行する場合がある。そして、蛇行が発生した場合においても、各電磁石の出力電流を所期の設定値のままで制御した場合、鋼板は蛇行した位置において所期の設定値で出力される電磁石の電磁吸引力によって厚み方向の形状が所期の湾曲形状とは異なる形状(例えば左右が非対称ないびつな形状)になるおそれがある。そして、所期の湾曲形状とは異なる形状のまま走行する鋼板に対しては安定した制振作用を発揮することができず、適切な制御が困難になるという問題が想定される。
【0007】
そこで、本出願人は、厚み方向に湾曲した状態で走行する鋼板が幅方向に蛇行した場合であっても、所期の湾曲形状を維持した搬送を可能とすることで、この鋼板の振動を適切に抑制することが可能な電磁制振装置として、リアルタイム又は所定時間毎に入力された鋼板の幅方向への変位量に基づいて、所期の湾曲形状となるように各電磁石対を構成する電磁石間における鋼板の補正目標位置を算出する鋼板補正目標位置算出手段と、幅方向へ変位した鋼板を鋼板補正目標位置算出手段で求めた各電磁石対における鋼板の補正目標位置へ移動させるように各電磁石対を構成する電磁石に流す電流量を個別に制御する電流量制御手段とを備えた制御部を用いた電磁制振装置を開発し、既に特許出願している(特願2010−64842)。
【0008】
しかしながら、上記態様は、電磁制振装置とは別の装置(例えば上位コンピュータ等)又は電磁制振装置の一部(例えば蛇行量検出機器等)から鋼板の幅方向への変位量(蛇行量)が入力されることが前提である。したがって、この前提条件が満たされない使用条件下では、電磁制振装置自体で鋼板の変位量を判断し、制振制御を行うことが望ましいと考えられた。
【0009】
本発明は、このような問題に着目してなされたものであって、主たる目的は、エッジ位置検出用の専用センサや特別な蛇行量検出機器を必須の構造とすることなく、また上位コンピュータなどから蛇行量に関する情報が提供されない使用環境下においても、幅方向に蛇行した鋼板を所期の湾曲形状に維持して搬送することができ、この鋼板の振動を適切に抑制することが可能な電磁制振装置を提供することにある。
【課題を解決するための手段】
【0010】
すなわち、本発明は、所定方向に走行する鋼板の厚み方向に対向配置した電磁石の組である電磁石対を鋼板の幅方向に複数並べ、各電磁石に流す電流を制御する制御部によって各電磁石対の電磁石間をこれら電磁石の対向方向に湾曲した形状で走行する鋼板の振動を抑制する電磁制振装置に関するものである。ここで、「鋼板の湾曲形状」としては、一般的な部分円弧(部分楕円弧(弓形)を含む)状の他、複数の部分円弧を組み合わせた形状(波状、S字状)を例示することができる。また、本発明の電磁制振装置では、鋼板の搬送方向は特に限定されず、引き上げながら電磁石の間を通過するようにした鋼板、または引き下げながら電磁石の間を通過するようにした鋼板、或いは水平に移動しながら電磁石の間を通過するようにした鋼板、これら何れの方向に搬送される鋼板であっても本発明の電磁制振装置の制振対象になる。
【0011】
そして、本発明に係る電磁制振装置は、複数の電磁石対を幅方向に配置した電磁石対領域の幅方向中央部又は幅方向中央部近傍に配置される電磁石対を除く各電磁石対に、当該電磁石対の電磁石間に鋼板の存否を検出可能なセンサを付帯させ、制御部として、幅方向に蛇行していない正規状態における鋼板の幅方向中央位置である鋼板中央位置から、電磁石対の電磁石間における鋼板の存在を検出したオン状態から電磁石対の電磁石間に鋼板の存在を検出しないオフ状態に切り替わったセンサのうち電磁石対領域の幅方向中央部に最も近いセンサの位置、又はオフ状態からオン状態に切り替わったセンサのうち電磁石対領域の幅方向中央部から最も遠いセンサの位置の少なくとも何れか一方のセンサの位置に基づく切替センサ基準位置までの距離と、鋼板の幅寸法の半分の長さとの差を鋼板の疑似変位量として算出する疑似変位量算出手段と、疑似変位量算出手段で算出した疑似変位量に基づいて所期の湾曲形状となるように各電磁石対を構成する電磁石間における鋼板の補正目標位置を算出する鋼板補正目標位置算出手段と、幅方向へ変位した鋼板を鋼板補正目標位置算出手段で求めた各電磁石対における鋼板の補正目標位置へ移動させるように各電磁石対を構成する電磁石に流す電流量を個別に制御する電流量制御手段とを適用したことを特徴としている。
【0012】
なお、鋼板の幅寸法を制御部に対して出力する出力源は電磁制振装置とは別の装置(例えば上位コンピュータ等)又は電磁制振装置の一部の何れであってもよい。また、「各電磁石対における鋼板の補正目標位置」は、「各電磁石対を構成する電磁石間における鋼板の補正目標位置」と同義であり、以下の説明においても便宜上「電磁石対における鋼板の位置」と記載しているが、当該記載は「電磁石対を構成する電磁石間における鋼板の位置」と同義である。また、鋼板の疑似変位量を算出するタイミングや、疑似変位量に基づいて鋼板の補正目標位置を算出するタイミングは、リアルタイム又は所定時間毎であればよい。
【0013】
このような電磁制振装置であれば、上位コンピュータなどの外部から制御部に対して鋼板の実際の変位量(蛇行量)に関する情報が入力されない使用環境下であっても、制御部の疑似変位量算出部により、オン状態からオフ状態に切り替わったセンサのうち電磁石対領域の幅方向中央部から最も近いセンサ(最内側のセンサ)の位置、又はオフ状態からオン状態に切り替わったセンサのうち電磁石対領域の幅方向中央部から最も遠いセンサ(最外側のセンサ)の位置に基づいて切替センサ基準位置を決定し、この切替センサ基準位置と鋼板の幅寸法に関する情報を利用して鋼板の疑似変位量(鋼板の疑似蛇行量)を演算して求めることができる。この疑似変位量算出部では、オン状態とオフ状態との間で切り替わったセンサの位置情報(切替センサ基準位置)に基づいて鋼板のおおよその変位量を疑似変位量として求めるが、この疑似変位量は鋼板の実際の変位量と一致する可能性は低い。しかしながら、実際の変位量と疑似変位量との誤差は、通常は隣り合うセンサ同士の離間寸法より大きくなることはなく、実際の運用上において問題となり難い。この点に着目し、本発明者は、疑似変位量を積極的に利用して鋼板補正目標位置算出手段により所期の湾曲形状となるように各電磁石対を構成する電磁石間における鋼板の補正目標位置を演算して求め、鋼板補正目標位置算出手段で演算処理により求めた補正目標位置に基づいて、電流量制御手段で各電磁石に流す電流を個別に調整する構成を想到するに至った。このような構成を採用することによって、上位コンピュータなどの外部から制御部に対して鋼板の実際の変位量(蛇行量)に関する情報が入力されない使用環境下であっても、各電磁石対における鋼板の位置を補正目標位置へ移動させることが可能となり、鋼板が蛇行した場合であっても蛇行した位置において鋼板を所期の湾曲形状と同じ乃至略同じ湾曲形状に誘導(矯正)することができる。したがって、所期の湾曲形状で走行する鋼板に対して適切な制振作用を発揮する本発明の電磁制振装置であれば、蛇行した鋼板に対してもその蛇行した位置において鋼板を所期の湾曲形状に保つことにより、蛇行して走行する鋼板の振動も適切に抑制することができる。
【0014】
また、本発明の電磁制振装置では、幅方向に変位する前の時点における鋼板の湾曲形状、つまり鋼板の所期の湾曲形状を隣接する各電磁石対における鋼板の所期目標位置間を結ぶ直線で近似し、鋼板補正目標位置算出手段を、電磁石対毎に、鋼板の補正目標位置を求める対象の電磁石対及びその電磁石対に隣接する電磁石対における鋼板の各所期目標位置と疑似変位量と隣接する電磁石対間の距離とを利用して鋼板の補正目標位置を算出するものに構成することができる。ここで、「各電磁石対における鋼板の所期目標位置」とは、蛇行していない状態で所期の湾曲形状となるように電磁石対毎に予め又はリアルタイムで設定される鋼板の目標位置である。「各電磁石対における鋼板の所期目標位置」の具体的な例としては、電磁石対を鋼板の幅方向に所定ピッチで5つ配置し、中央の電磁石対と蛇行していない鋼板の幅方向中心とを一致ないし略一致させた電磁制振装置で左右対称な部分円弧形状の鋼板を搬送する場合、両エンド(両端)の電磁石対における鋼板の所期目標位置は各電磁石を構成する電磁石が対向する方向に一致ないし略一致し、両エンドの電磁石対に隣接する電磁石対(一方のエンド側から順に第1電磁石対、第2電磁石対、第3電磁石対、第4電磁石対、第5電磁石対とすれば第2電磁石対と第4電磁石対)における鋼板の所期目標位置が各電磁石対を構成する電磁石が対向する方向に一致ないし略一致する。
【0015】
本発明では、鋼板の所期湾曲形状を隣接する各電磁石対における鋼板の所期目標位置同士を直線で結んだ形状に近似し、鋼板が蛇行した場合であっても直線で近似した鋼板の形状を鋼板の幅方向に平行移動させた状態で保持すれば蛇行した位置においても鋼板が所期の湾曲形状と同一ないし略同一形状になるとの技術的思想に基づき、鋼板補正目標位置算出手段で、各電磁石対における鋼板の所期目標位置と、隣接する電磁石対間の距離と、鋼板の疑似蛇行量とを利用して各電磁石対における鋼板の補正目標位置をそれぞれ算出することができるようにしている。このような態様であれば、予め設定された既定値である「各電磁石対における鋼板の所期目標位置」及び「隣接する電磁石対間の距離」に加えて、リアルタイム又は所定時間毎に算出する「鋼板の疑似変位量」を利用するのみで鋼板補正目標位置算出手段によって少ない計算量で各電磁石対における鋼板の補正目標位置を求めることができる。
【0016】
鋼板補正目標位置算出手段における演算処理の好適な一例としては、鋼板の補正目標位置を求める対象の電磁石対(以下、「補正目標位置算出対象電磁石対」と称す)における鋼板の所期目標位置、及び補正目標位置算出対象電磁石対に隣接する電磁石対における鋼板の所期目標位置をそれぞれ共通の平面上における座標として求め、これら座標の差、より具体的には電磁石対を構成する電磁石の対向方向の沿った座標の差を算出するとともに、補正目標位置算出対象電磁石対における鋼板の補正目標位置と補正目標位置算出対象電磁石対に隣接する電磁石対における鋼板の所期目標位置との差を算出し、これら2つの算出結果である差の比である第1相対比が、隣接する電磁石対間の離間距離と、この離間距離から鋼板の疑似変位量を差し引いて算出した値との比である第2相対比に等しいことを利用して、各電磁石対における鋼板の補正目標位置をそれぞれ求める演算処理が挙げられる。
【0017】
また、本発明の電磁制振装置では、電流量制御手段が「電流量制御」として電流の出力強度を制御するものであってもよいが、簡単な制御仕様とする場合には、電磁石を励磁状態と無励磁状態との間でのみ切り替えること(電流のオン・オフ)によって各電磁石からの出力電流量をゼロかゼロ以上の所定値の何れかに設定するようにする態様を採用することが好ましい。
【0018】
また、本発明の電磁制振制御プログラムは、上述した構成をなす電磁制振装置に適用されるプログラムであり、幅方向に蛇行していない正規状態における鋼板の幅方向中央位置である鋼板中央位置から、電磁石対の電磁石間に鋼板の存在を検出したオン状態から電磁石対の電磁石間に鋼板の存在を検出しないオフ状態に切り替わったセンサのうち電磁石対領域の幅方向中央部に最も近いセンサの位置、又はオフ状態からオン状態に切り替わった前記センサのうち電磁石対領域の幅方向中央部から最も遠いセンサの位置の少なくとも何れか一方に基づく切替センサ基準位置までの距離と、鋼板の幅寸法の半分の長さとの差を鋼板の疑似変位量として算出する疑似変位量算出ステップと、前記疑似変位量算出ステップで算出した疑似変位量に基づいて、所期の湾曲形状となるように各電磁石対を構成する電磁石間における鋼板の補正目標位置を算出する鋼板補正目標位置算出ステップと、幅方向へ変位した鋼板を鋼板補正目標位置算出ステップで求めた各電磁石対における鋼板の補正目標位置へ移動させるように各電磁石対を構成する電磁石に流す電流量を個別に制御する電流量制御ステップとを経ることを特徴としている。このような電磁制振制御プログラムであれば蛇行して走行する鋼板の湾曲形状を所期の湾曲形状に維持した状態で搬送することができ、走行中の振動を効果的に抑制することができる。
【発明の効果】
【0019】
本発明の電磁制振装置によれば、上位コンピュータから鋼板の蛇行量が提供されない使用環境下であっても、専用のエッジ位置検出センサや蛇行量検出機器を必須の構造とすることなく、所期の湾曲形状で蛇行せずに走行する鋼板の振動を抑制することができるとともに、湾曲形状のまま蛇行して走行する鋼板の振動も効果的に抑制することができる。
【図面の簡単な説明】
【0020】
【図1】本発明の一実施形態に係る電磁制振装置の全体構成模式図。
【図2】図1のa方向模式矢視図。
【図3】図1のb方向模式矢視図。
【図4】同実施形態に係る電磁制振装置における制御部の機能ブロック図。
【図5】図3の一部拡大図。
【図6】図3に示す鋼板の湾曲形状を直線で近似した状態を示す図。
【図7】蛇行前後における隣接の電磁石間における鋼板の湾曲形状を近似した直線を一辺とする直角三角形を示す図。
【図8】蛇行後に所期目標位置に基づいて制振制御した場合の鋼板の形状を図3に対応させて示す図。
【図9】同実施形態に係る電磁制振装置に用いる電磁制振制御プログラムのフローチャート。
【図10】蛇行後に補正目標位置に基づいて制振制御した場合の鋼板の形状を図3に対応させて示す図。
【図11】同実施形態における疑似変位量を算出する際の概念図。
【図12】同実施形態における疑似変位量を算出する際の概念図。
【図13】同実施形態における疑似変位量を算出する際の概念図。
【図14】同実施形態における疑似変位量を算出する際の概念図。
【発明を実施するための形態】
【0021】
以下、本発明の一実施形態を、図面を参照して説明する。
【0022】
本実施形態に係る電磁制振装置1は、図1に示すように、連続メッキ鋼板ラインLにおいて、溶融金属槽(実施形態では溶融亜鉛槽Zを適用)よりも下流側に配設され、溶融亜鉛槽Zを通過して引き上げられながら走行する鋼板Sの振動を抑制するものである。なお、図1では鋼板Sを側面から見た状態を模式的に示し、図2では図1のa方向矢視図を模式的に示している。また、図3は、走行している鋼板Sを上方(図1のb方向)から見た状態を模式的に示す図である。なお、図1では鋼板Sを便宜的に1本の実線で表しているが、本実施形態に係る電磁制振装置1は、図3に示すように厚み方向に湾曲した形状で所定方向に走行する鋼板Sに対して制振作用を発揮し得るものである。特に、本実施形態の電磁制振装置1は、図3に示すように部分円弧状(部分楕円弧状)に湾曲した鋼板Sに対して安定した制振作用を発揮し得るものである。
【0023】
連続メッキ鋼板ラインL(特に溶融亜鉛を用いるメッキ鋼板ラインは「連続溶融亜鉛メッキライン」(CGL;Continuous Galvanizing Line)と称される)は、溶融亜鉛槽Zと電磁制振装置1との間に、噴出口を鋼板Sに向けたノズルA1を備えたエアーナイフ部Aを設け、溶融亜鉛槽Zを通過して引き上げられながら走行する鋼板Sに対して各ノズルA1の噴出口から加圧空気又は加圧ガスを噴出させることによって過剰な溶融亜鉛を吹き落とすようにしている。溶融亜鉛槽Z及びエアーナイフ部Aは既知のものを適用することができ、詳細な説明は省略する。
【0024】
電磁制振装置1は、図2及び図3に示すように、鋼板Sを厚み方向に挟み得る位置に対向配置した第1電磁石2A及び第2電磁石2Bの組である電磁石対2を鋼板Sの幅方向に所定ピッチで複数(図2では5つ以上の電磁石対2、図3では説明の便宜上5つの電磁石対2)配置したものである。なお、図2では、実際には手前側鋼板Sを破線で示している。各電磁石対2を構成する第1電磁石2A、第2電磁石2Bは、それぞれ断面コ字形状ないし略コ字形状をなす鉄心21と、鉄心21の各脚部に巻回されたコイル22とから構成され、コイル22に給電するか否かによって鉄心21から磁気吸引力を出力可能な励磁状態と、鉄心21から磁気吸引力を出力しない無励磁状態との間で切替可能な既知のものである。本実施形態では、複数の電磁石対2を鋼板Sの幅方向に所定ピッチで配設しており、鋼板Sが蛇行せずに正常な姿勢(以下、「正常姿勢」と称す)で電磁石対領域2Xを走行する場合、図2に示すように、鋼板Sの幅方向中央Scは複数の電磁石対2を配設した領域(電磁石対領域)2Xの幅方向中央2Xcと一致しており、また、電磁石対領域2Xに電磁石対2を幅方向に3以上の奇数組配設した場合、真ん中に配設した電磁石対2の幅方向中央と電磁石対領域2Xの幅方向中央2Xcとを一致させている。なお、図3では、各電磁石対2における幅方向中央を破線で示し、第1電磁石2Aと第2電磁石2Bとの中間を一点鎖線で示している。
【0025】
また、電磁制振装置1には、各第1電磁石2A、各第2電磁石2Bのうち鋼板Sに対向する面に鋼板Sまでの距離を検出する第1センサ3A、3B及び第2センサ3A、3Bを設けている。本実施形態では、例えば渦電流式のセンサ3A、3Bを適用し、これらセンサ3A、3Bを各電磁石2A、2Bの凹部(鉄心21の脚部に挟まれ得る位置)に配置している。第1センサ3A、3B及び第2センサ3A、3Bは、検出面をそれぞれ対応する各電磁石2A、2Bの磁極面と同一面又はほぼ同一面に設定され、鋼板Sを挟んで対向する位置に設けられている。第1センサ3A及び第2センサ3Bは、鋼板Sまでの距離d1、d2を検出し、それぞれの検出結果を検出信号として制御部4に出力するものである。なお、本実施形態では、センサ3A、3Bの検出面全体が鋼板Sによって完全ないし略完全に覆われた状態でのみ、センサ3A、3Bが鋼板Sまでの距離を検出できるように設定している。各電磁石対2には一対のセンサ3A,3Bが対応付けられており、以下の説明では1つの電磁石対2に対応付けて設けた一対のセンサ3A,3Bを総称して単に「センサ3」と称する場合がある。ここで、図2に示すように、センサ3の中心(検知ポイント)を電磁石対2の幅方向中央2cに一致または略一致させたレイアウトを採用したり、図5に示すように、センサ3の中心(検知ポイント)を各電磁石対2の端部、より具体的には電磁石対2のうち電磁石対領域2Xの幅方向中央部2Xcから相対的に遠い方の端部と一致または略一致させたレイアウトを採用することもできる。また、図2及び図5に示すように、全ての電磁石対2のうち、電磁石対領域2Xの幅方向中央部2Xcに配置された電磁石対2(図5で「iv」を付した電磁石対2)にはセンサ3を設けていない。これは、電磁石対領域2Xの幅方向中央部2Xcに配置された電磁石対2を鋼板Sのエッジ位置が通過する程度までに鋼板Sが蛇行することは想定し難いからである。なお、電磁石対領域2Xの幅方向中央部2Xcに配置された電磁石対2にもセンサ3を設け、このセンサ3が電磁石対2の電磁石2A,2B間に鋼板Sの存在を検出したオン状態から電磁石対2の電磁石間2A,2Bに鋼板Sの存在を検出しないオフ状態に切り替わった時点で異常事態発生と判断して電磁制振装置1を強制停止するように構成してもよい。図2では正規状態の鋼板Sを破線で示している。
【0026】
本実施形態に係る電磁制振装置1は、各電磁石対2の電磁石2A、2Bに電気的に接続されてこれら各電磁石2A、2Bに流す電流量に基づく各電磁石2A、2Bの磁気吸引力を制御する制御部4を備え、第1電磁石2Aと第2電磁石2Bとの対向方向に所期の湾曲形状で各電磁石対2の電磁石2A、2B間を走行する鋼板Sの振動を制御部4によって抑制することができるように構成されている。ここで、本実施形態では、鋼板Sの所期湾曲形状として、鋼板Sの幅方向中央を中心に左右対称な部分円弧状(部分楕円形状)を採用している。そして、鋼板Sが所期の湾曲形状となるように、制御部4には各電磁石対2における鋼板Sの目標位置(所期目標位置:図3で塗りつぶした黒丸で示す位置)が入力され、鋼板Sが蛇行していない場合には、この各電磁石対2における鋼板Sの相対位置が所期目標位置となるように、各電磁石2A、2Bに流す電流を制御部4によって制御している。
【0027】
制御部4は、各センサ3A、3Bにも電気的にも接続されている点、及び各センサ3A、3Bで検出した鋼板Sの位置情報に基づいて鋼板Sの振動を抑制するように各電磁石2A、2Bの磁気吸引力を制御するものである点は周知の電磁制振装置と同様であるが、以下の点で本実施形態に係る電磁制振装置1は周知の電磁制振装置と異なる。
【0028】
すなわち、本実施形態の電磁制振装置1における制御部4は、図4に示すように、鋼板Sが幅方向へ変位した場合において、少なくともリアルタイム又は所定時間毎に鋼板Sの移送中にオン状態とオフ状態との間で切り替わったセンサ3の位置を利用して鋼板Sの幅方向への疑似的な変位量(蛇行量)である疑似変更量α’を算出する疑似変位量算出手段41と、算出した疑似変位量α’(疑似蛇行量)に基づき所期の湾曲形状となるように各電磁石対2における鋼板Sの補正目標位置を算出する鋼板補正目標位置算出手段42と、蛇行した鋼板Sを鋼板補正目標位置算出手段42で求めた鋼板Sの補正目標位置へ移動させるように各電磁石対2を構成する電磁石2A、2Bに流す電流量を個別に制御する電流量制御手段43とを備えている。なお、制御部4には、電磁制振装置1に電気的に接続された上位コンピュータ(図示省略)からラインL側の情報、つまり走行する鋼板Sに関する情報である板厚、板幅、鋼種、張力等が入力されるように構成している。
【0029】
疑似変位量算出手段41は、幅方向に蛇行していない正規状態における鋼板Sの幅方向中央位置である鋼板中央位置Scから、オン状態からオフ状態に切り替わったセンサ3のうち電磁石対領域2Xの幅方向中央部2Xcに最も近いセンサ(最内側のセンサ)の位置、又はオフ状態からオン状態に切り替わったセンサ3のうち電磁石対領域2Xの幅方向中央部2Xcに最も遠いセンサ(最外側のセンサ)の位置の少なくとも何れか一方である「切替センサ基準位置3p」までの距離と、鋼板Sの幅寸法の半分の長さとの差を鋼板Sの疑似変位量α’として算出する。ここで、疑似変位量算出手段42は、鋼板中央位置Scから切替センサ基準位置3pまでの距離(仮蛇行幅)を算出する第1次算出部と、第1次算出部で算出した仮蛇行幅と鋼板Sの幅寸法の半分の長さとの差を算出する第2次算出部とによって鋼板Sの疑似変位量α’を算出するものと捉えることができる。
【0030】
鋼板補正目標位置算出手段42は、上述した鋼板Sの疑似変位量α’に加えて、蛇行していない状態で所期の湾曲形状となるように電磁石対2毎に予め又はリアルタイムで設定される鋼板Sの目標位置である所期目標位置(所期目標位置情報)と、隣接する電磁石対2間の距離(より具体的には各電磁石対2の幅方向中央同士の距離、以下「電磁石対間距離(電磁石対間距離情報)」と称す)とを利用して電磁石対2毎に各電磁石対2における鋼板Sの補正目標位置を算出するものである。本実施形態の電磁制振装置1は、図3の一部拡大図である図5及び図6に示すように、幅方向に変位せずに正常姿勢で電磁石対領域2Xを走行する鋼板Sの湾曲形状、つまり蛇行する前の鋼板Sの湾曲形状である所期湾曲形状を、隣り合う電磁石対2における鋼板Sの所期目標位置同士を直線で結んだ折れ線形状(鋼板Sの所期目標位置を順に線分で結んだ折れ線:図5及び図6において破線で示す)で近似し、鋼板Sが蛇行した場合であっても図6において実線で示すように、近似した鋼板Sの形状を電磁石対領域2Xの幅方向に平行移動させて保持すれば蛇行した位置において鋼板Sが所期湾曲形状と同一ないし略同一形状になるとの技術的思想に基づき、鋼板補正目標位置算出手段42により、各電磁石対2における鋼板Sの補正目標位置を、隣り合う電磁石対2における鋼板Sの各所期目標位置、鋼板Sの蛇行量、電磁石対間距離を利用して演算して求めるものである。
【0031】
このように、鋼板補正目標位置算出手段42は、電磁石対2毎の鋼板Sの所期目標位置を隣り合った電磁石対2間で直線補間(線形補間)し、電磁石対間距離及び鋼板Sの疑似変位量α’を利用して、蛇行した鋼板Sの補正目標位置を演算により導き出すものである。なお、隣接する電磁石対2間の距離は予め定められており、制御部4に「電磁石間距離情報」として入力されている。また、制御部4は、疑似変位量算出手段41で疑似変位量α’を算出するタイミングや鋼板補正目標位置算出手段42で補正目標位置を算出するタイミングはリアルタイム又は所定時間毎など適宜に設定することができる。
【0032】
そして、図6及び図7(図7は図6の一部であり、後述する相似関係にある2つの直角三角形をそれぞれ個別に示したものである)に示すように、幅方向へ変位した後(蛇行後)の鋼板Sの補正目標位置「x」を求める対象の電磁石対2(T)(以下、「補正目標位置算出対象電磁石対2(T)」と称す)における鋼板Sの所期目標位置「S2」、この補正目標位置算出対象電磁石対2(T)に隣接する電磁石対2(N)における鋼板Sの所期目標位置「S1」とし、各所期目標位置S1、S2を共通のxy平面上の座標として求めた場合のy軸方向(第1電磁石2Aと第2電磁石2Bとが対向する方向)の座標の差「S2−S1」として示すことができる線分と、x軸方向に隣り合う電磁石対2(T)、2(N)の離間距離である電磁石対間距離「d」として示すことができる線分と、各電磁石2(T)、2(N)における鋼板Sの所期目標位置S2、S1同士を結ぶ線分とによって形成される直角三角形(図7の紙面上側の直角三角形)が、補正目標位置算出対象電磁石対2(T)における鋼板Sの補正目標位置「x」と電磁石対2(N)における鋼板Sの所期目標位置「S1」とを共通のxy平面上の座標として求めた場合のy軸方向の差「x−S1」として示すことができる線分と、電磁石対間距離「d」と鋼板Sの疑似変位量「α’」との差「d−α’」で示すことができるx軸方向の線分と、鋼板Sの補正目標位置「x」から鋼板Sの所期目標位置S2、S1同士を結ぶ直線と平行に延びる線分とによって形成される直角三角形(図7の紙面下側の直角三角形)と相似関係にあることを利用して、本実施形態の電磁制振装置1は、制御部4の鋼板補正目標位置算出手段42で以下の演算処理を行う。
【0033】
具体的に、本実施形態の鋼板補正目標位置算出手段42は、各所期目標位置S1、S2を共通のxy平面上の座標として求めた場合のy軸方向(第1電磁石2Aと第2電磁石2Bとが対向する方向)の座標の差「S2−S1」と、鋼板Sの補正目標位置「x」と電磁石対2(N)における鋼板Sの所期目標位置「S1」を共通のxy平面上の座標として求めた場合のy軸方向の差「x−S1」、これら2つの比である第1相対比「(S2−S1):(x−S1)」が、電磁石対間距離「d」と、この電磁石対間距離「d」と鋼板Sの疑似変位量(疑似蛇行量)「α’」との差「d−α’」、これら2つの比である第2相対比「d:(d−α’)」に等しいことを利用して補正目標位置算出対象電磁石対2(T)における鋼板Sの補正目標位置「x」を求める。つまり、鋼板補正目標位置算出手段42は、第1相対比「(S2−S1):(x−S1)」と第2相対比「d:(d−α’)」とを等式で結ぶ数式、すなわち「(S2−S1):(x−S1)=d:(d−α’)」から、補正目標位置算出対象電磁石対2(T)における鋼板Sの補正目標位置「x」を演算して求めるものである。上記数式「(S2−S1):(x−S1)=d:(d−α’)」を、「x」を求める数式に展開すると、「x=((S2−S1)(d−α’)/d)+S1」となり、「S2」、「S1」、「d」及び「α’」にそれぞれ制御部4に入力された隣接する電磁石対2における鋼板Sの所期目標位置情報、電磁石対間距離情報、鋼板Sの疑似変位量情報に基づく数値を代入することにより、補正目標位置算出対象電磁石対2(T)における鋼板Sの補正目標位置「x」を求めることができる。本実施形態では、このような演算処理により鋼板補正目標位置算出手段42で各電磁石対2における鋼板Sの補正目標位置「x」を数値としてそれぞれ求める。
【0034】
電流量制御手段43は、各電磁石対2における鋼板Sの目標位置を所期目標位置から鋼板補正目標位置算出手段42で求めた補正目標位置「x」に一時的に置き換え、各電磁石対2における鋼板Sの位置が所期目標位置から補正目標位置に移動するようにそれぞれの電磁石対2を構成する電磁石2A、2Bを励磁状態または無励磁状態にする。なお、疑似変位量情報に基づいて第1電磁石2Aと第2電磁石2Bとの間に鋼板Sが存在しない電磁石対2であると判別した場合、この電磁石対2を構成する電磁石2A、2B及び各センサ3A、3Bを駆動させない状態にしてもよい。
【0035】
なお、制御部4は、図示しないが、各センサ3A、3Bからの出力信号が入力されるコントローラと、制御ゲインに関する指令等をコントローラに出力するシーケンサと、コントローラが出力した各電磁石2A、2Bに流す電流に関する指令(電流量制御情報)に基づいて各電磁石2A、2Bにそれぞれ電流を供給する第1アンプ、第2アンプとを備えたものであるが、これらコントローラ、シーケンサ、各アンプの詳細な説明は省略する。
【0036】
次に、このような構成を有する電磁制振装置1の使用方法及び作用について説明する。
【0037】
まず、電磁制振装置1を起動すると、各電磁石対2における鋼板Sの所期目標位置情報及び電磁石間距離情報が制御部4に入力され、制御部4が各電磁石対2における鋼板Sの所期目標位置情報に基づき各電磁石2A、2Bの電流量を制御することにより、図1及び図3に示すように、溶融亜鉛槽Zを通過して引き上げられながら蛇行せずに走行する鋼板Sを所期の湾曲形状に保持したままその振動を抑制することができる。
【0038】
ところで走行中の鋼板Sが蛇行した際においても、制御部4が各電磁石対2における鋼板Sの所期目標位置情報に基づき各電磁石2A、2Bの電流量を制御し続けた場合、つまり、各電磁石対2における鋼板Sの目標位置を所期目標位置に維持し続けた場合には、図8に示すように、鋼板Sが所期の湾曲形状とは異なる形状に変形し、鋼板Sに対する適切な制振作用を発揮することができないおそれがある。
【0039】
そこで、本実施形態の電磁制振装置1では、リアルタイムまたは所定時間毎に、本実施形態に係る電磁制振制御プログラムが実行して以下のように各部を作動させている。すなわち、制御部4の疑似変位量算出手段41により走行する鋼板Sの疑似変位量α’を算出(疑似変位量算出ステップS1;図9参照)する。具体的には、図11及び図12に示すように、正規状態では電磁石対領域2Xの幅方向両エンド(端部)2Xeの電磁石対2(図11及び図12に示す電磁石対「i」,「vii」)に付帯させたセンサ3がオフ状態となる幅寸法の鋼板Sが、電磁石対領域2Xの幅方向の一方のエンド側(図11では紙面左側、図12では紙面右側)に蛇行し、当該一方のエンド側2Xeに配置した電磁石対2に付帯させたセンサ3(図11では左端の電磁石対「vii」に付帯させたセンサ3、図12では右端の電磁石対「i」に付帯させたセンサ3)のみがオフ状態からオン状態に切り替わった場合、疑似変位量算出部41では、以下の手順で疑似変位量α’を算出する。つまり、オフ状態からオン状態に切り替わったセンサ3のうち、電磁石対領域2Xの幅方向中央部2Xcから最も遠いセンサ3(最外側のセンサ3)の位置を切替センサ基準位置3pとし、切替センサ基準位置3pから鋼板中央位置Scまでの距離を算出し、その距離と鋼板Sの幅寸法の半分の長さとの差を算出し、その算出値を疑似変位量α’とする。ここで、図11及び図12に示すように、鋼板Sの蛇行によりオン状態からオフ状態に切り替わるセンサ3が無い場合には、上述したオフ状態からオン状態に切り替わったセンサ(電磁石対viiに付帯させたセンサ3、又は電磁石対iに付帯させたセンサ3)のみに着目して疑似変位量α’を求めることができる。このような場合、つまり、鋼板Sが蛇行してオフ状態からオン状態に切り替わったセンサ3のみに着目して疑似変位量α’を求める場合の式は「(鋼板中央位置Scから切替センサ基準位置3pまでの距離)−鋼板Sの幅寸法の半分」となる。
【0040】
また、図13及び図14に示すように、例えば正規状態では電磁石対領域2Xの幅方向両エンド2Xcの電磁石対2(図13及び図14に示す電磁石対「i」,「vii」)に付帯させたセンサ3がオフ状態となる幅寸法であって且つ図11及び図12に示す鋼板Sよりも幅寸法が小さい鋼板Sが、電磁石対配置領域2Xの何れか一方のエンド2Xe側(図13では紙面左側、図14では紙面右側)に蛇行し、他方のエンド側に配置した電磁石対2に付帯させたセンサ3(図13では右から2番目の電磁石対「vi」に付帯させたセンサ3、図14では左から2番目の電磁石対「ii」に付帯させたセンサ3)がオン状態からオフ状態に切り替わった場合、疑似変位量算出部41では、以下の手順で疑似変位量α’を算出する。つまり、オン状態からオフ状態に切り替わったセンサ3のうち、電磁石対領域2Xの幅方向中央部2Xcに最も近いセンサ3(最内側のセンサ3)の位置を切替センサ基準位置3pとし、切替センサ基準位置3pからから鋼板中央位置Scまでの距離を算出し、その距離と鋼板Sの幅寸法の半分の長さとの差を算出し、その算出値を疑似変位量α’とする。ここで、図13及び図14に示すように、鋼板Sの蛇行によりオフ状態からオン状態に切り替わるセンサ3が無い場合には、上述したオン状態からオフ状態に切り替わったセンサ3(図13では右から2番目の電磁石対「vi」に付帯させたセンサ3、図14では左から2番目の電磁石対「ii」に付帯させたセンサ3)のみに着目して疑似変位量α’を求めることができる。このような場合、つまり、鋼板Sが蛇行してオン状態からオフ状態に切り替わったセンサ3のみに着目して疑似変位量α’を求める場合の式は「鋼板Sの幅寸法の半分−(鋼板中央位置Scから切替センサ基準位置3pまでの距離)」となる。なお、図11乃至図14では、正規状態の鋼板Sを実線で示し、蛇行した鋼板Sを破線で示している。
【0041】
次いで、本実施形態に係る電磁制振装置1は、疑似変位量算出手段41により演算して求めた疑似変位量α’に基づいて鋼板Sが蛇行していると判別した場合には、制御部4がこれら鋼板Sの蛇行量情報、各電磁石対2における鋼板Sの所期目標位置情報、及び電磁石間距離情報に基づいて各電磁石対2における鋼板Sの補正目標位置xを補正目標位置算出手段42で演算して求める(鋼板補正目標位置算出ステップS2;図9参照)。具体的には、補正目標位置算出手段42において、上述した数式「x=((S2−S1)(d−α’)/d)+S1」を用いて、「S2」、「S1」、「d」及び「α’」にそれぞれ制御部4に入力された鋼板Sの所期目標位置情報、電磁石対間距離情報、鋼板Sの蛇行量情報に基づく数値を代入して、各電磁石対2(T)における鋼板Sの補正目標位置「x」を求める。
【0042】
次いで、制御部4は、各電磁石対2における鋼板Sの目標位置を定める制御データとして、所期目標位置に代えて補正目標位置算出手段42により鋼板補正目標位置算出ステップS2で演算して求めた補正目標位置「x」に基づき、各電磁石対2に対する蛇行して走行する鋼板Sの位置がそれぞれ補正目標位置に移動するように電磁石2A、2Bに流す電流量を電流量制御手段43により個別に制御する(電流量制御ステップS3;図9参照)。なお、本実施形態の電磁制振装置Xは、各電磁石対2を構成する第1電磁石2A、第2電磁石2Bをそれぞれ個別に励磁状態又は無励磁状態にする電流量情報を制御部4から各電磁石2A、2Bに出力する。その結果、本実施形態の電磁制振装置1は、鋼板Sを図10の実線で示すように蛇行した位置において所期の湾曲形状に保つことができ、この所期湾曲形状で走行する鋼板Sに対して適切な制振作用を発揮することができる。なお、図10では、所期の湾曲形状で蛇行せずに正常姿勢で走行する鋼板Sを破線で示している。
【0043】
このようにして本実施形態の電磁制振装置1は、湾曲形状で走行する鋼板Sが蛇行した場合に、蛇行した位置において鋼板Sを所期の湾曲形状に保ったまま制振制御を行うことができる。
【0044】
なお、本実施形態の電磁制振装置1では、溶融亜鉛槽Zを通過して引き上げられながら走行する鋼板Sが各電磁石対2においてどの位置に存在するかという情報を第1センサ3A及び第2センサ3Bによって検出できるようにしており、これらセンサ3A、3Bからの検出情報(位置情報)が制御部4にリアルタイム又は所定時間毎に入力されるように構成している。そして、制御部4が、これらの検出情報(位置情報)及び補正目標位置情報に基づいて、第1電磁石2A、第2電磁石2Bを励磁状態にする電流量制御情報または無励磁状態にする電流量制御情報を各電磁石2A、2Bに出力し、各電磁石2A、2Bに流す電流を制御する。その結果、鋼板Sは、蛇行せずに走行する場合のみならず蛇行した場合であっても各電磁石2A、2Bの磁気吸引力により所期の湾曲形状と同じ乃至略同じ湾曲形状に保たれ、走行中の振動が抑制される。
【0045】
したがって、溶融亜鉛槽Zを通過して引き上げられながら走行する鋼板Sを厚み方向に湾曲させることによって鋼板Sの剛性を維持しつつ、このような湾曲形状の鋼板Sとエアーナイフ部Aを構成する各ノズルA1における噴出口との距離を予め想定している一定範囲内に維持することができ、鋼板Sに作用する噴射力の変動を防止し、均一又はほぼ均一なメッキ厚みにすることができる。
【0046】
このように、本実施形態に係る電磁制振装置1では、電磁石対2に付帯させたセンサ3のうちオン状態からオフ状態に切り替わったセンサ3のうち最外側のセンサ3の位置、またはオフ状態からオン状態に切り替わったセンサ3のうち最内側のセンサ3の位置を切替センサ基準位置3pとし、この切替センサ基準位置3pに基づいて鋼板Sの疑似変位量α’を演算して求める疑似変位量算出手段41と、疑似変位量算出手段41で算出した鋼板Sの疑似変位量α’に基づいて各電磁石対2における鋼板Sの補正目標位置xを演算して求める鋼板補正目標位置算出手段42と、蛇行した鋼板Sを鋼板補正目標位置算出手段42で求めた鋼板Sの補正目標位置xへ移動させるように電磁石2A、2Bに流す電流量を個別に制御する電流量制御手段43とを備えた制御部4を用いている。ここで、疑似変位量算出手段41で求める疑似変位量α’は実際の鋼板Sの変位量αとは異なり得るが、その誤差は最大でも電磁石対領域2Xの幅方向に隣り合う電磁石対2同士の離間寸法程度であり、具体的には隣り合う電磁石対2にそれぞれ付帯させたセンサ3の検知ポイント同士の距離程度であり、実際の運用上では問題になり難い誤差である。したがって、このような実際の運用上において許容範囲内の誤差である疑似変位量α’を鋼板Sの厚み方向の位置情報(鋼板Sの振動情報)を検出するセンサ3を利用して算出することができ、この疑似変位量α’を用いて鋼板Sの目標補正位置xを算出するように構成した本実施形態に係る電磁制振装置1では、鋼板Sの厚み方向の位置情報(鋼板Sの振動情報)を検出するセンサ3とは別に鋼板Sのエッジ位置を検出するためのセンサや鋼板Sの蛇行量を直接検出可能な蛇行量検出機器を配置する必要が無く、鋼板補正目標位置算出手段42で求めた鋼板Sの目標補正位置情報に基づいて各電磁石2A,2Bを励磁状態にするか否かを適切且つ確実に制御し、湾曲形状で走行する鋼板Sが蛇行した場合であっても蛇行した位置で鋼板Sを所期の湾曲形状と同じ乃至略同じになるように誘導することができ、幅方向に蛇行した鋼板Sに対しても走行中の振動を適切に抑制することができる。その結果、所期の湾曲形状のまま正常姿勢で走行する鋼板Sは勿論のこと、幅方向に蛇行して走行する鋼板Sの振動をも効果的に抑制することができ、実用性に優れたものとなる。したがって、このような電磁制振装置1を、鋼板Sに付着した余剰な溶融金属を吹き飛ばすエアーナイフ部Aとともに連続メッキ鋼板ラインLに配設した場合には、この電磁制振装置1によって、所期の湾曲形状のまま又は所期の湾曲形状に一致ないし略一致する湾曲形状で走行する鋼板Sの振動を効果的に抑制することができ、その結果、鋼板Sとエアーナイフ部Aとの距離を想定している一定範囲内に維持することが可能になり、鋼板Sに作用する噴射力の変動を防止し、均一又はほぼ均一なメッキ厚みにすることができる。
【0047】
また、本実施形態に係る電磁制振プログラムは、電磁石対2に付帯させたセンサ3の位置情報を利用して求めた疑似変位量α’を疑似変位量算出ステップS1と、疑似変位量算出ステップS1で求めた疑似変位量α’に基づいて、所期の湾曲形状となるように各電磁石対2における鋼板Sの補正目標位置xを演算して求める鋼板補正目標位置算出ステップS2と、蛇行した鋼板Sを鋼板補正目標位置算出ステップS2で求めた鋼板Sの補正目標位置xへ移動させるように電磁石2A、2Bに流す電流量を個別に制御する電流量制御ステップS3とを経るため、上述した通り、蛇行せずに正常姿勢で走行する鋼板S及び幅方向に蛇行して走行する鋼板Sの振動を適切に抑制することができる。
【0048】
なお、本発明は上述した実施形態に限定されるものではない。例えば、例えば、オン状態からオフ状態に切り替わったセンサと、オフ状態からオン状態に切り替わったセンサが両方存在する場合、疑似変位量算出部では、オン状態からオフ状態に切り替わったセンサのうち最内側のセンサの位置、オフ状態からオン状態に切り替わったセンサのうち最外側のセンサの位置、これら両方のセンサ位置を切替センサ基準位置としてそれぞれの疑似変位量を求め、その値を足して2で割った値(平均値)を疑似変位量として算出するように構成したり、何れか一方の切替センサ基準位置を優先的に利用して疑似変位量を算出するように構成することができる。
【0049】
また、各電磁石対に対するセンサの相対位置は適宜変更してもよく、センサの検出ポイントを電磁石対の幅方向中央部に一致させたり、電磁石対の幅方向中央部より幅方向エンド側へ変位させた位置に設定することができる。
【0050】
また、鋼板の所期湾曲形状として、上述した実施形態で示した部分円弧(部分楕円弧)状に代えて、複数の部分円弧を組み合わせた形状(波状、S字状)や、幅方向中央を中心に左右対称ではない湾曲形状を採用することができる。
【0051】
また、鋼板の所期目標位置及び電磁石間距離を制御部に対して出力する出力源は、電磁制振装置とは別の装置又は電磁制振装置の一部の何れであってもよい。
【0052】
また、電流量制御手段が電流出力オン・オフに加えて、あるいは電流出力のオン・オフに代えて、出力強度(電磁石に流す電流量の大小)を調整することにより電磁石の電流量を制御するものであっても構わない。特に、電流量制御手段を、電流出力のオン・オフの切替を制御するものではなく、電流出力をオフにする(電磁石を無励磁状態にする)ことなく出力強度を調整するものとする場合は、上述した実施形態における電流出力のオフ状態(電磁石の無励磁状態)の代わりに、電磁石対間の鋼板を電磁石の磁気吸引力によっては幅方向に移動させないか、もしくは移動させたとしても無視し得る程度の極小距離しか移動させない程度の微弱な電流を流すようにすることが望ましい。このような電流制御を行えば、電流出力のオン・オフ制御を行う態様と比較すると、鋼板を幅方向に移動させない状態でも常に微弱電流を出力することとなるため、鋼板を所望距離だけ幅方向に移動させるように電流出力を上昇させる際の応答性が向上し、鋼板の制振制御効率を高めることが可能となる。出力強度を調整することにより各電磁石の電流量を制御するものであっても構わない。
【0053】
また、鋼板の幅寸法を制御部に対して出力する出力源は、電磁制振装置とは別の装置又は電磁制振装置の一部の何れであってもよい。
【0054】
鋼板の幅方向に配置する電磁石対の数や、鋼板の幅方向に隣り合う電磁石対同士のピッチ(電磁石間距離情報の基になる数値)は適宜変更することができる。また、幅方向に隣り合う電磁石対同士のピッチを不均一に設定してもよい。この場合、電磁石対に付帯させるセンサ同士のピッチも不均一となり得るが、鋼板の実際の変位量(蛇行量)と疑似変位量との最大誤差は、最もピッチが大きいセンサ間の距離(具体的には最もピッチが大きい検出ポイント同士の離間距離)になる。また、電磁石対の数や電磁石対同士のピッチの変更に応じて電磁石対領域の幅寸法も適宜変えてもよい。
【0055】
また、上述した実施形態では全ての電磁石対のうち、電磁石対領域2Xの幅方向中央部2Xcに配置された電磁石対2(図11で「iv」を付した電磁石対2)にはセンサ3を付帯させていない態様を例示したが、この電磁石対2「iv」に隣り合う電磁石対2「iii」,「v」を電磁石対領域2Xの幅方向中央部2Xc近傍に配置された電磁石対とし、これら電磁石対2にセンサ3を付帯させない態様を採用してもよい。さらに、電磁石対を電磁石対領域の幅方向に偶数配置した場合には、少なくとも電磁石対領域の幅方向中央部に近い2つの電磁石対にはセンサを付帯させなくてもよい。
【0056】
また、上述した実施形態では、溶融金属槽として溶融亜鉛槽を例示したが、これに代えて、例えば溶融した錫又はアルミニウム或いは樹脂塗料などを貯留した槽を適用しても構わない。本発明の電磁制振装置では、鋼板に対する表面被覆処理として、メッキ塗工処理の他、適宜の表面処理材料を鋼鈑に噴霧することによって表面被覆処理を施す表面カラーリング処理等、他の表面被覆処理を採用することができる。また、本発明の電磁制振装置は、表面被覆処理を施す前の時点において走行する鋼板の振動や、表面被覆処理を施すことなく所定方向に走行する鋼板の制振をも好適に抑制することができる。
【0057】
またさらに、本発明の電磁制振装置が、表面被覆処理を施した後に引き下げながら電磁石の間を通過するようにした鋼板の振動を抑制制御する装置であったり、表面被覆処理を施した後に水平に移動させながら電磁石の間を通過するようにした鋼板の振動を抑制制御する装置であっても構わない。また、上述した実施形態では、電磁石間を通過する鋼板の姿勢が鉛直の場合を示したが、本発明において鋼板は鉛直以外の姿勢、例えば水平姿勢、傾斜姿勢の何れかで電磁石間を通過させるようにすることもできる。
【0058】
その他、各部の具体的構成についても上記実施形態に限られるものではなく、本発明の趣旨を逸脱しない範囲で種々変形が可能である。
【符号の説明】
【0059】
1…電磁制振装置
2…電磁石対
2A、2B…電磁石
4…制御部
41…疑似変位量算出手段
42…鋼板補正目標位置算出手段
43…電流量制御手段
S…鋼板
【特許請求の範囲】
【請求項1】
所定方向に走行する鋼板の厚み方向に対向配置した電磁石の組である電磁石対を前記鋼板の幅方向に複数並べ、各電磁石に流す電流を制御する制御部によって前記各電磁石対の電磁石間をこれら電磁石の対向方向に湾曲した形状で走行する鋼板の振動を抑制する電磁制振装置であって、
複数の電磁石対を幅方向に配置した電磁石対領域の幅方向中央部又は幅方向中央部近傍に配置される電磁石対を除く各電磁石対に、当該電磁石対の電磁石間における鋼板の存否を検出可能なセンサを付帯させ、
前記制御部が、
幅方向に蛇行していない正規状態における鋼板の幅方向中央位置である鋼板中央位置から、電磁石対の電磁石間に鋼板の存在を検出したオン状態から電磁石対の電磁石間に鋼板の存在を検出しないオフ状態に切り替わった前記センサのうち前記電磁石対領域の幅方向中央部に最も近いセンサの位置、又はオフ状態からオン状態に切り替わった前記センサのうち前記電磁石対領域の幅方向中央部から最も遠いセンサの位置、の少なくとも何れか一方に基づく切替センサ基準位置までの距離と、鋼板の幅寸法の半分の長さとの差を鋼板の疑似変位量として算出する疑似変位量算出手段と、
前記疑似変位量算出手段で算出した疑似変位量に基づいて、所期の湾曲形状となるように各電磁石対を構成する電磁石間における鋼板の補正目標位置を算出する鋼板補正目標位置算出手段と、
幅方向へ変位した鋼板を前記鋼板補正目標位置算出手段で求めた各電磁石対における鋼板の補正目標位置へ移動させるように前記各電磁石対を構成する電磁石に流す電流量を個別に制御する電流量制御手段とを備えたものであることを特徴とする電磁制振装置。
【請求項2】
幅方向に変位する前の時点における前記鋼板の所期湾曲形状を隣接する前記電磁石対における鋼板の所期目標位置間を結ぶ直線で近似し、
前記鋼板補正目標位置算出手段が、前記電磁石対毎に、前記鋼板の補正目標位置を求める対象の電磁石対及び当該電磁石対に隣接する電磁石対における鋼板の各所期目標位置と前記疑似変位量と隣接する電磁石対間の距離とを利用して鋼板の補正目標位置を算出するものである請求項1に記載の電磁制振装置。
【請求項3】
前記鋼板補正目標位置算出手段が、
前記鋼板の補正目標位置を求める対象の電磁石対における鋼板の所期目標位置と、当該電磁石対に隣接する電磁石対における鋼板の所期目標位置とをそれぞれ座標として求め、これら座標の差を算出するとともに、補正目標位置を求める対象の電磁石対における鋼板の補正目標位置と当該電磁石対に隣接する電磁石対における鋼板の所期目標位置との差を算出し、これら2つの算出結果である差の比たる第1相対比が、
隣接する電磁石対間の離間距離と、当該離間距離から前記疑似変位量を差し引いて算出した値との比たる第2相対比に等しいことを利用して、各電磁石対における鋼板の各補正目標位置を求めるものである請求項1又は2の何れかに記載の電磁制振装置。
【請求項4】
請求項1乃至3の何れかに記載の電磁制振装置に適用される電磁制振制御プログラムであって、
幅方向に蛇行していない正規状態における鋼板の幅方向中央位置である鋼板中央位置から、電磁石対の電磁石間に鋼板の存在を検出したオン状態から電磁石対の電磁石間に鋼板の存在を検出しないオフ状態に切り替わったセンサのうち電磁石対領域の幅方向中央部に最も近いセンサの位置、又はオフ状態からオン状態に切り替わった前記センサのうち電磁石対領域の幅方向中央部から最も遠いセンサの位置、の少なくとも何れか一方に基づく切替センサ基準位置までの距離と、鋼板の幅寸法の半分の長さとの差を鋼板の疑似変位量として算出する疑似変位量算出ステップと、
前記疑似変位量算出ステップで算出した疑似変位量に基づいて、所期の湾曲形状となるように各電磁石対を構成する電磁石間における鋼板の補正目標位置を算出する鋼板補正目標位置算出ステップと、
幅方向へ変位した鋼板を前記鋼板補正目標位置算出ステップで求めた各電磁石対における鋼板の補正目標位置へ移動させるように前記各電磁石対を構成する電磁石に流す電流量を個別に制御する電流量制御ステップとを経ることを特徴とする電磁制振制御プログラム。
【請求項1】
所定方向に走行する鋼板の厚み方向に対向配置した電磁石の組である電磁石対を前記鋼板の幅方向に複数並べ、各電磁石に流す電流を制御する制御部によって前記各電磁石対の電磁石間をこれら電磁石の対向方向に湾曲した形状で走行する鋼板の振動を抑制する電磁制振装置であって、
複数の電磁石対を幅方向に配置した電磁石対領域の幅方向中央部又は幅方向中央部近傍に配置される電磁石対を除く各電磁石対に、当該電磁石対の電磁石間における鋼板の存否を検出可能なセンサを付帯させ、
前記制御部が、
幅方向に蛇行していない正規状態における鋼板の幅方向中央位置である鋼板中央位置から、電磁石対の電磁石間に鋼板の存在を検出したオン状態から電磁石対の電磁石間に鋼板の存在を検出しないオフ状態に切り替わった前記センサのうち前記電磁石対領域の幅方向中央部に最も近いセンサの位置、又はオフ状態からオン状態に切り替わった前記センサのうち前記電磁石対領域の幅方向中央部から最も遠いセンサの位置、の少なくとも何れか一方に基づく切替センサ基準位置までの距離と、鋼板の幅寸法の半分の長さとの差を鋼板の疑似変位量として算出する疑似変位量算出手段と、
前記疑似変位量算出手段で算出した疑似変位量に基づいて、所期の湾曲形状となるように各電磁石対を構成する電磁石間における鋼板の補正目標位置を算出する鋼板補正目標位置算出手段と、
幅方向へ変位した鋼板を前記鋼板補正目標位置算出手段で求めた各電磁石対における鋼板の補正目標位置へ移動させるように前記各電磁石対を構成する電磁石に流す電流量を個別に制御する電流量制御手段とを備えたものであることを特徴とする電磁制振装置。
【請求項2】
幅方向に変位する前の時点における前記鋼板の所期湾曲形状を隣接する前記電磁石対における鋼板の所期目標位置間を結ぶ直線で近似し、
前記鋼板補正目標位置算出手段が、前記電磁石対毎に、前記鋼板の補正目標位置を求める対象の電磁石対及び当該電磁石対に隣接する電磁石対における鋼板の各所期目標位置と前記疑似変位量と隣接する電磁石対間の距離とを利用して鋼板の補正目標位置を算出するものである請求項1に記載の電磁制振装置。
【請求項3】
前記鋼板補正目標位置算出手段が、
前記鋼板の補正目標位置を求める対象の電磁石対における鋼板の所期目標位置と、当該電磁石対に隣接する電磁石対における鋼板の所期目標位置とをそれぞれ座標として求め、これら座標の差を算出するとともに、補正目標位置を求める対象の電磁石対における鋼板の補正目標位置と当該電磁石対に隣接する電磁石対における鋼板の所期目標位置との差を算出し、これら2つの算出結果である差の比たる第1相対比が、
隣接する電磁石対間の離間距離と、当該離間距離から前記疑似変位量を差し引いて算出した値との比たる第2相対比に等しいことを利用して、各電磁石対における鋼板の各補正目標位置を求めるものである請求項1又は2の何れかに記載の電磁制振装置。
【請求項4】
請求項1乃至3の何れかに記載の電磁制振装置に適用される電磁制振制御プログラムであって、
幅方向に蛇行していない正規状態における鋼板の幅方向中央位置である鋼板中央位置から、電磁石対の電磁石間に鋼板の存在を検出したオン状態から電磁石対の電磁石間に鋼板の存在を検出しないオフ状態に切り替わったセンサのうち電磁石対領域の幅方向中央部に最も近いセンサの位置、又はオフ状態からオン状態に切り替わった前記センサのうち電磁石対領域の幅方向中央部から最も遠いセンサの位置、の少なくとも何れか一方に基づく切替センサ基準位置までの距離と、鋼板の幅寸法の半分の長さとの差を鋼板の疑似変位量として算出する疑似変位量算出ステップと、
前記疑似変位量算出ステップで算出した疑似変位量に基づいて、所期の湾曲形状となるように各電磁石対を構成する電磁石間における鋼板の補正目標位置を算出する鋼板補正目標位置算出ステップと、
幅方向へ変位した鋼板を前記鋼板補正目標位置算出ステップで求めた各電磁石対における鋼板の補正目標位置へ移動させるように前記各電磁石対を構成する電磁石に流す電流量を個別に制御する電流量制御ステップとを経ることを特徴とする電磁制振制御プログラム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【公開番号】特開2012−207297(P2012−207297A)
【公開日】平成24年10月25日(2012.10.25)
【国際特許分類】
【出願番号】特願2011−75938(P2011−75938)
【出願日】平成23年3月30日(2011.3.30)
【出願人】(000002059)シンフォニアテクノロジー株式会社 (1,111)
【Fターム(参考)】
【公開日】平成24年10月25日(2012.10.25)
【国際特許分類】
【出願日】平成23年3月30日(2011.3.30)
【出願人】(000002059)シンフォニアテクノロジー株式会社 (1,111)
【Fターム(参考)】
[ Back to top ]