
電磁式アクチュエータ及び電磁式アクチュエータ装置
【課題】微細に駆動することができ、駆動以外の方向に柔軟性がある電磁式アクチュエータ及び電磁式アクチュエータ装置を提供する。
【解決手段】磁力を発生し、発生する磁力の方向を変更できる空芯コイル21、及び、磁性を有する芯部材22により構成される電磁石20と、電磁石20と交互に配置され、磁力を有する複数の永久磁石30と、電磁石20及び永久磁石30を駆動範囲に移動可能に保持し、弾性及び絶縁性を有した保持手段40と、電磁石20に電流を流す電源制御部50とを備える。
【解決手段】磁力を発生し、発生する磁力の方向を変更できる空芯コイル21、及び、磁性を有する芯部材22により構成される電磁石20と、電磁石20と交互に配置され、磁力を有する複数の永久磁石30と、電磁石20及び永久磁石30を駆動範囲に移動可能に保持し、弾性及び絶縁性を有した保持手段40と、電磁石20に電流を流す電源制御部50とを備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、電磁力を用いた電磁式アクチュエータ及びそれを用いた電磁式アクチュエータ装置に関するものである。
【背景技術】
【0002】
産業ロボットや医療ロボットの技術の発展にともない、今まで存在する電磁式や油空圧式のアクチュエータを応用し、ロボットアームや人工筋肉に利用できるアクチュエータの開発が行なわれている(例えば、特許文献1)。特に、人型ロボットなどの技術分野では、人間の持つ筋肉に近い動作ができるように、柔軟で微細に駆動することができるアクチュエータなどが研究されている。
【0003】
特許文献1は、ピストン及びシリンダにより構成される油圧式のアクチュエータであり、シリンダ内部に流量を調整できるオリフィスを備え、アクチュエータの応答速度を自由に変化させることができる機構を備えている。この種のアクチュエータは、油圧を駆動源としているため、大推力を出力するのには適しているが、油の粘性が抵抗となるため、応答速度が遅いうえ、また、ピストンとシリンダの摺動部の摩擦(スティックスリップ現象など)の影響によりアクチュエータを微細に制御することが難しいなどの問題がある。更に、ピストン構造であるので、ピストンの駆動方向以外に自由度(柔軟性)を持たせることができない。
【特許文献1】特開平09−222102号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
本発明の課題は、微細に駆動することができ、駆動以外の方向に柔軟性がある電磁式アクチュエータ及び電磁式アクチュエータ装置を提供することである。
【課題を解決するための手段】
【0005】
本発明は、以下のような解決手段により、前記課題を解決する。なお、理解を容易にするために、本発明の実施形態に対応する符号を括弧内に付して説明するが、これに限定されるものではない。
請求項1の発明は、磁力を有し、前記磁力の方向を変更できる複数の第1の部材(20)と、前記第1の部材(20)と交互に配置され、磁力を有する複数の第2の部材(30)と、前記第1の部材(20)及び前記第2の部材(30)を駆動範囲に移動可能に保持する保持手段(40)とを備える電磁式アクチュエータ(10)である。
【0006】
請求項2の発明は、請求項1に記載の電磁式アクチュエータ(10)において、前記第2の部材(30)は、前記磁力の方向を変更できることを特徴とする電磁式アクチュエータ(10)である。
【0007】
請求項3の発明は、請求項1又は請求項2に記載の電磁式アクチュエータ(10)において、前記第1の部材(20)及び前記第2の部材(30)は電磁石(20)であることを特徴とする電磁式アクチュエータ(10)である。
【0008】
請求項4の発明は、請求項1に記載の電磁式アクチュエータ(10)において、前記第1の部材(20)は電磁石(20)であり、前記第2の部材(30)は磁性を有した磁性部材であることを特徴とする電磁式アクチュエータである。
【0009】
請求項5の発明は、請求項1に記載の電磁式アクチュエータ(10)において、前記第1の部材(20)は電磁石(20)であり、前記第2の部材(30)は永久磁石(30)であることを特徴とする電磁式アクチュエータ(10)である。
【0010】
請求項6の発明は、請求項3から請求項5までのいずれか1項に記載の電磁式アクチュエータ(10)において、前記電磁石(20)は、導電性のある線材を巻いた空芯コイル(21)と、前記空芯コイル(21)の空芯部に挿入され、磁性を有した芯部材(22)とを備えることを特徴とする電磁式アクチュエータ(10)である。
【0011】
請求項7の発明は、請求項3から請求項6までのいずれか1項に記載の電磁式アクチュエータ(10)において、前記電磁石(20)に電流を流す電源制御部(50)を備えることを特徴とする電磁式アクチュエータ(10)である。
【0012】
請求項8の発明は、請求項7に記載の電磁式アクチュエータ(10)において、前記電磁石(20)は、それぞれが前記電源制御部(50)に並列に接続されることを特徴とする電磁式アクチュエータ(10)である。
【0013】
請求項9の発明は、請求項7に記載の電磁式アクチュエータ(10)において、前記電磁石(20)は、それぞれが前記電源制御部(50)に直列に接続されることを特徴とする電磁式アクチュエータ(10)である。
【0014】
請求項10の発明は、請求項1から請求項9までのいずれか1項に記載の電磁式アクチュエータ(10)において、前記保持手段(40)は、弾性を有し、前記第1の部材(20)及び前記第2の部材(30)の間に設けられる弾性部材であることを特徴とする電磁式アクチュエータ(10)である。
【0015】
請求項11の発明は、請求項1から請求項9までのいずれか1項に記載の電磁式アクチュエータ(10)において、前記保持手段(40)は、弾性を有し、前記第1の部材(20)及び前記第2の部材(30)の全周を覆う筒状部材(40)であることを特徴とする電磁式アクチュエータ(10)である。
【0016】
請求項12の発明は、請求項10又は請求項11に記載の電磁式アクチュエータ(10)において、前記弾性部材又は前記筒状部材(40)は、絶縁性を有することを特徴とする電磁式アクチュエータ(10)である。
【0017】
請求項13の発明は、請求項1から請求項12までのいずれか1項に記載の電磁式アクチュエータ(10)において、前記第1の部材(20)及び前記第2の部材(30)の数量は、一方が他方と同等又はそれよりも一つ少ないことを特徴とする電磁式アクチュエータ(10)である。
【0018】
請求項14の発明は、請求項1から請求項13までのいずれか1項に記載の複数の電磁式アクチュエータ(10)を並列及び/又は直列に接続することを特徴とする電磁式アクチュエータ装置である。
【発明の効果】
【0019】
以上説明したように、本発明によれば、以下のような効果がある。
(1)第1の部材は、磁力の方向を変更でき、磁力を有する第2の部材と交互に配置されているので、第1の部材の磁力の方向を変更することで、第1の部材及び第2の部材の間に引力及び斥力を発生させ、相対的に移動することができる。
(2)第1の部材及び第2の部材は電磁石であるので、各電磁石の磁力を個別に変化させることにより、電磁式アクチュエータを微細に制御することができる。
(3)第1の部材は電磁石であり、第2の部材は磁性部材であるので、応用範囲が広く、コストを抑えて電磁式アクチュエータを構成することができる。
【0020】
(4)第1の部材は電磁石であり、第2の部材は永久磁石であるので、容易に強い磁力を得ることができ、電磁式アクチュエータを効率よく駆動させることができる。
(5)電磁石は、導電性のある線材を巻いた空芯コイル及び磁性を有した芯部材により構成しているので、強力な磁力を得ることができる。
(6)電磁石に電流を流す電源制御部を備えているので、電流を微細に制御することにより磁力を微細に制御することができ、また、電流の流す方向を変えることにより磁力の方向を変更することができる。
【0021】
(7)前記電磁石は、それぞれが電源制御部に並列に接続されているので、電磁式アクチュエータの駆動推力を大きくすることができる。
(8)前記電磁石は、それぞれが電源制御部に直列に接続されているので、電磁式アクチュエータの消費電力を抑制することができる。
(9)保持手段は、第1の部材及び第2の部材の間に弾性を有する弾性部材を設けているので、弾性部材の復元力により、各部材の間隔を保持し、伸縮だけでなく捩れ方向にも自由度を持たせることができる。
【0022】
(10)保持手段は、第1の部材及び第2の部材の全周を覆う筒状部材であるので、単純な構成で第1の部材及び第2の部材を移動可能に保持することができ、また、伸縮だけでなく捩れ方向にも自由度を持たせることができる。
(11)弾性部材又は筒状部材は、絶縁性を有しているので、電磁石に流れる電流を絶縁することができる。
(12)電磁式アクチュエータ装置は、複数の電磁式アクチュエータを並列及び/又は直列に接続しているので、用途に応じてさまざまの形態をとることができる。
【発明を実施するための最良の形態】
【0023】
本発明は、微細に駆動することができ、駆動以外の方向に柔軟性がある電磁式アクチュエータ及び電磁式アクチュエータ装置を提供するという目的を、磁力を有した第1の部材及び第2の部材を、交互に配置し、保持手段により移動可能に保持し、第1の部材の磁力の方向を変化させることにより実現する。
【実施例1】
【0024】
以下、図面等を参照して、本発明の実施例をあげて、さらに詳しく説明する。
図1は、本発明による実施例1の電磁式アクチュエータの詳細を示す図である。また、図2は、本発明による実施例1の電磁式アクチュエータをロボットアームに用いた模式図である。なお、説明文中の上、下、左、右方向は、各図のそれぞれの方向に対応しているものとする。
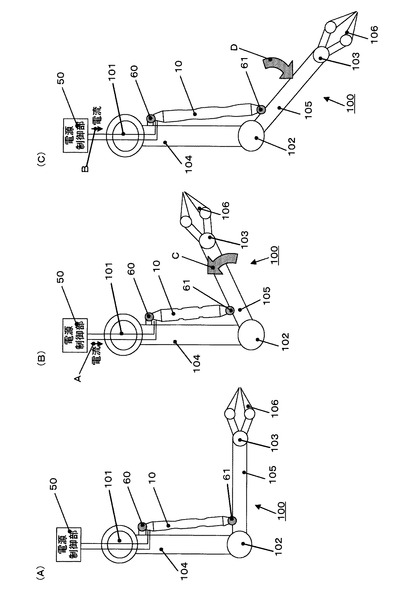
ロボットアーム100は、図2に示すように、第1の間接部101及び第2の間接部102の間に設けられた第1の腕部104、第2の関節部102及び第3の間接部103の間に設けられた第2の腕部105、及び、第3の間接部103に設けられたハンド部106により構成され、第1の腕部104及び第2の腕部105の間に電磁式アクチュエータ10が固定された産業用ロボットのアーム部である。
第1の間接部101は、ロボットアーム100をロボット本体(図示せず)と回転可能に接続するボールジョイントである。
第2の間接部102は、第1の腕部104及び第2の腕部105を回転可能に接続するボールジョイントである。
第3の間接部103は、第2の腕部105及びハンド部106を回転可能に接続するボールジョイントである。
ハンド部106は、2本の爪部から構成され、ワークなどを挟む作業部である。
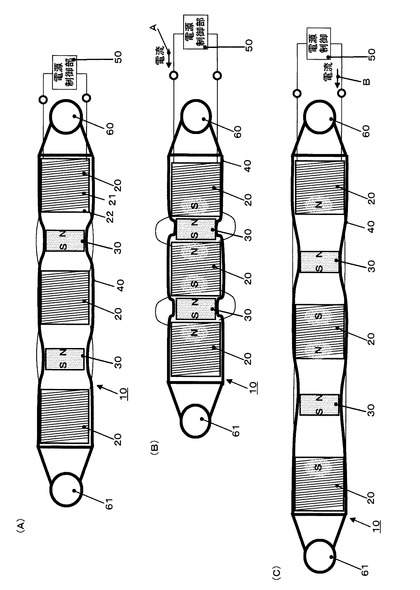
電磁式アクチュエータ10は、図2に示すように、ロボットアーム100の第2の間接部102を回転させるための駆動源であり、図1に示すように、3個の電磁石20及び2個の永久磁石30を交互に配置し、全体を筒状部材40で覆い、筒状部材40の端部に第1の端部材60及び第2の端部材61を配置することにより構成され、図1中の左右方向に伸縮することができる。また、第1の端部材60から電磁石20の配線が出され、電源制御部50に接続されている。
電磁石20は、コイル21及び鉄芯22を備えており、各コイル21は直列に接続されている。
コイル21は、導電性のある銅線が巻かれた空芯型のコイルである。
鉄芯22は、コイル21の空芯部に挿入された磁性材料である。磁性材料は、例えば、鉄である。
永久磁石30は、磁力の強いネオジウム(Ne−Fe−B系磁石)であり、図1に示すように、左右方向に着磁され、右側をN極、左側をS極としている。
筒状部材40は、弾性及び絶縁性のあるシリコンチューブであり、電磁石20及び永久磁石30に一定間隔を保てるように保持し、また、電磁式アクチュエータ10の伸縮駆動に対応して伸縮することができる。また、駆動方向以外にも曲げ及び捩れの自由度(柔軟性)がある。
電源制御部50は、電磁石20に所定の電流を送る電流制御部であり、送る電流の方向を変更することで、電磁石20から発生する磁力線の方向を変更し、永久磁石30に対し図1中の左右方向に引力及び斥力を得るように制御することができる。
第1の端部材60は、ロボットアーム100の第1の腕部104に回転可能に接続するボールジョイントである。
第2の端部材61は、ロボットアーム100の第2の腕部105に回転可能に接続するボールジョイントである。
【0025】
次に、電磁式アクチュエータ10の動作原理について説明する。
電磁式アクチュエータ10は、電源制御部50が電流を流していないときは、図1(A)に示すように、電磁石20及び永久磁石30の間が等間隔に保たれた状態で静止している。
電流制御部50により、図1(B)に示す方向(矢印A)に電流を流したときは、電磁石20のコイル21は、右端から左端へ磁力線が向かい、左端がS極となり、隣り合う永久磁石30の右端(N極)との間に引力が発生し、両者が引き合う。この引力が、各電磁石20及び永久磁石30の間で発生するので、電磁式アクチュエータ10は縮むことができる。
一方、図1(C)に示す方向(矢印B)に電流を流したときは、電磁石20のコイル21は、左端から右端へ磁力線が向かい、左端がN極となり、隣り合う永久磁石30の右端(N極)との間に斥力が発生し、両者が反発し合う。この斥力が、各電磁石20及び永久磁石30の間で発生するので、電磁式アクチュエータ10は伸びることができる。
【0026】
電磁式アクチュエータ10は、電磁石20に流す電流の量に依存して駆動力を変化させることができるので、大電流を流すことで、大駆動力を発することができる。また、コイル21の線材の径を太くしたり、永久磁石30を磁力の大きなものへと変更したりすることにより推力を増大させることも可能である。例えば、永久磁石30の残留磁束密度が約1[T]であり、電磁石20の発生磁束密度が電流1[A]を流したときに約0.09[T]である場合には、発生する引力又は斥力は約10[N]であった。
【0027】
続いて、ロボットアーム100の電磁式アクチュエータ10が取り付けられている第2の間接部102の動作方法について説明する。
電磁式アクチュエータ10は、図2に示すように、第2の間接部102を駆動するために設けられており、第1の端部材60が第1の腕部104に、第2の端部材61が第2の腕部105に接続されている。第1の端部材104から電磁式アクチュエータ10の電磁石20の配線が出され、ロボットアーム100の先端部に配線を出さないようにしているので、ロボットアーム100の先端(ハンド部106)側の配線を減らすことができ、制御特性を向上させることができる。
図2(A)は、ロボットアーム100が第2の間接部102の駆動範囲の中間にあるときであり、電磁式アクチュエータ10は、図1(A)に示す静止状態であり、第2の腕部105は、電磁式アクチュエータ10の筒状部材40の剛性により支えられている。必要に応じて、電源制御部50から電流を流し、第2の腕部105の静止安定性を向上させることができる。
【0028】
ロボットアーム100は、図2(B)に示すように、電源制御部50から所定の方向(矢印A)に電流を流すことにより電磁式アクチュエータ10を縮ませ、第2の関節部102により第1の腕部105を上方(矢印C)へ曲げることができる。また、図2(C)に示すように、図2(B)に示す電流とは逆方向(矢印B)に電流を流すことにより電磁式アクチュエータ10を伸ばし、第1の腕部105を下方(矢印D)へ曲げることができる。
【0029】
ロボットアーム100の第2の関節部102は、ボールジョイントで構成されているので、第2の腕部105が想定外の方向から外力を受けたときに、前述した電磁式アクチュエータ10により回転する(上下)方向以外にも(微小に)回転することができ、外力を受け流すことができる。例えば、第2の腕部105に何らかの外力が図2の紙面の裏から表に対して加わったときは、第2の腕部105が第2の関節部102により、図2の紙面より表側に回転する。このときに、電磁式アクチュエータ10は、第1の端部材60と第2の端部材61との間に捩れ応力が加わる。仮に、伸縮方向以外に自由度(柔軟性)がないアクチュエータを用いた場合は、アクチュエータは捩れ応力により破損する可能性があるが、本実施例では、第1の端部材60及び第2の端部材61は弾性のある筒状部材40と接続されているので、筒状部材40が弾性変形し、捩れ応力を受け流すことができる。
【0030】
以上より、実施例1の電磁式アクチュエータ10には以下のような効果がある。
(1)電磁式アクチュエータ10は、電磁石20と永久磁石30とが交互に配置されているので、電磁石20が発生する磁力の方向を変更することで、電磁石20及び永久磁石30の間に引力及び斥力を発生させ、相対的に伸縮することができる。
(2)電磁式アクチュエータ10は、電磁石20及び永久磁石30を用いているので、容易に強い磁力を得ることができ、電磁式アクチュエータ10を効率よく駆動させることができる。
【0031】
(3)電磁石20は、銅線を巻いたコイル21及び鉄芯22により構成しているので、容易に強力な磁力を得ることができる。
(4)電磁石20に電流を流す電源制御部50を備えているので、電流を微細に制御することにより磁力を微細に制御することができ、また、電流の流す方向を変えることにより磁力の方向を変更することができる。
【0032】
(5)電磁石20は、それぞれが電源制御部50に直列に接続されているので、電磁式アクチュエータ10の消費電力を抑制することができる。
(6)筒状部材40は、弾性及び絶縁性を備え、電磁石20及び永久磁石30を覆っているので、電磁石20に流れる電流を絶縁し、電磁式アクチュエータ10の伸縮方向以外に柔軟性を得ることができる。
【0033】
(変形例)
以上説明した実施例に限定されることなく、種々の変形や変更が可能であって、それらも本発明の均等の範囲内である。
(1)実施例1では、電磁式アクチュエータ10は、電磁石20及び永久磁石30により構成したが、電磁石20のみ、又は、電磁石20及び磁性部材(例えば、鉄)との組み合わせで構成してもよい。
電磁石20のみで構成した場合は、各電磁石20の発生磁力を個別に制御できるので、電磁式アクチュエータ10の駆動を微細に制御することができる。また、電磁石20及び磁性部材で構成した場合は、磁性部材に流通性の高い鉄などを使用することができるので、コストを抑えることができる。
【0034】
(2)実施例1では、各電磁石20は、直列に電源制御部50と接続されたが、並列に接続してもよい。また、並列と直列を混在させることも可能である。並列に接続することにより、大駆動力で駆動させることができる。
(3)実施例1では、筒状部材40を用いたが、電磁石20及び永久磁石30の間にゴムなどの弾性(及び絶縁性)部材を設けてもよい。
(4)実施例1では、筒状部材40にシリコンチューブを用いたが、それ以外の材料及び構造を用いてもよい。例えば、本実施例のロボットアーム100のように、図2(A)の電磁式アクチュエータ10の静止時に下方へ自重による応力がかかる場合は、網状に形成した人工繊維材を筒状にし、シリコンチューブと組み合わせることで、シリコンチューブへの応力集中を小さくすることも可能であり、可動部の耐久性を上げることもできる。また、機械のジョイント部分や自動車のシフトレバーなどに使用されるゴムブーツを使用することも可能である。
【0035】
(5)実施例1では、ロボットアーム100の第2の間接部102の駆動に電磁式アクチュエータ10を1台使用したが、複数台使用してもよい。例えば、大駆動力を出力するために2台の電磁式アクチュエータ10を並列に固定し電磁式アクチュエータ装置として使用することも可能である。
(6)実施例1では、電磁式アクチュエータ10は、3個の電磁石20及び2個の永久磁石30で構成されたが、それ以外の個数でもよい。例えば、電磁式アクチュエータ10の駆動ストロークを長く取りたい場合、又は、大駆動力を出力したい場合は、5個の電磁石20及び4個の永久磁石30とすることも可能である。
【図面の簡単な説明】
【0036】
【図1】本発明による実施例1の電磁式アクチュエータの詳細を示す図である。
【図2】本発明による実施例1の電磁式アクチュエータをロボットアームに用いた模式図である。
【符号の説明】
【0037】
10 電磁式アクチュエータ
20 電磁石
30 永久磁石
40 筒状部材
50 電源制御部
100 ロボットアーム
【技術分野】
【0001】
本発明は、電磁力を用いた電磁式アクチュエータ及びそれを用いた電磁式アクチュエータ装置に関するものである。
【背景技術】
【0002】
産業ロボットや医療ロボットの技術の発展にともない、今まで存在する電磁式や油空圧式のアクチュエータを応用し、ロボットアームや人工筋肉に利用できるアクチュエータの開発が行なわれている(例えば、特許文献1)。特に、人型ロボットなどの技術分野では、人間の持つ筋肉に近い動作ができるように、柔軟で微細に駆動することができるアクチュエータなどが研究されている。
【0003】
特許文献1は、ピストン及びシリンダにより構成される油圧式のアクチュエータであり、シリンダ内部に流量を調整できるオリフィスを備え、アクチュエータの応答速度を自由に変化させることができる機構を備えている。この種のアクチュエータは、油圧を駆動源としているため、大推力を出力するのには適しているが、油の粘性が抵抗となるため、応答速度が遅いうえ、また、ピストンとシリンダの摺動部の摩擦(スティックスリップ現象など)の影響によりアクチュエータを微細に制御することが難しいなどの問題がある。更に、ピストン構造であるので、ピストンの駆動方向以外に自由度(柔軟性)を持たせることができない。
【特許文献1】特開平09−222102号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
本発明の課題は、微細に駆動することができ、駆動以外の方向に柔軟性がある電磁式アクチュエータ及び電磁式アクチュエータ装置を提供することである。
【課題を解決するための手段】
【0005】
本発明は、以下のような解決手段により、前記課題を解決する。なお、理解を容易にするために、本発明の実施形態に対応する符号を括弧内に付して説明するが、これに限定されるものではない。
請求項1の発明は、磁力を有し、前記磁力の方向を変更できる複数の第1の部材(20)と、前記第1の部材(20)と交互に配置され、磁力を有する複数の第2の部材(30)と、前記第1の部材(20)及び前記第2の部材(30)を駆動範囲に移動可能に保持する保持手段(40)とを備える電磁式アクチュエータ(10)である。
【0006】
請求項2の発明は、請求項1に記載の電磁式アクチュエータ(10)において、前記第2の部材(30)は、前記磁力の方向を変更できることを特徴とする電磁式アクチュエータ(10)である。
【0007】
請求項3の発明は、請求項1又は請求項2に記載の電磁式アクチュエータ(10)において、前記第1の部材(20)及び前記第2の部材(30)は電磁石(20)であることを特徴とする電磁式アクチュエータ(10)である。
【0008】
請求項4の発明は、請求項1に記載の電磁式アクチュエータ(10)において、前記第1の部材(20)は電磁石(20)であり、前記第2の部材(30)は磁性を有した磁性部材であることを特徴とする電磁式アクチュエータである。
【0009】
請求項5の発明は、請求項1に記載の電磁式アクチュエータ(10)において、前記第1の部材(20)は電磁石(20)であり、前記第2の部材(30)は永久磁石(30)であることを特徴とする電磁式アクチュエータ(10)である。
【0010】
請求項6の発明は、請求項3から請求項5までのいずれか1項に記載の電磁式アクチュエータ(10)において、前記電磁石(20)は、導電性のある線材を巻いた空芯コイル(21)と、前記空芯コイル(21)の空芯部に挿入され、磁性を有した芯部材(22)とを備えることを特徴とする電磁式アクチュエータ(10)である。
【0011】
請求項7の発明は、請求項3から請求項6までのいずれか1項に記載の電磁式アクチュエータ(10)において、前記電磁石(20)に電流を流す電源制御部(50)を備えることを特徴とする電磁式アクチュエータ(10)である。
【0012】
請求項8の発明は、請求項7に記載の電磁式アクチュエータ(10)において、前記電磁石(20)は、それぞれが前記電源制御部(50)に並列に接続されることを特徴とする電磁式アクチュエータ(10)である。
【0013】
請求項9の発明は、請求項7に記載の電磁式アクチュエータ(10)において、前記電磁石(20)は、それぞれが前記電源制御部(50)に直列に接続されることを特徴とする電磁式アクチュエータ(10)である。
【0014】
請求項10の発明は、請求項1から請求項9までのいずれか1項に記載の電磁式アクチュエータ(10)において、前記保持手段(40)は、弾性を有し、前記第1の部材(20)及び前記第2の部材(30)の間に設けられる弾性部材であることを特徴とする電磁式アクチュエータ(10)である。
【0015】
請求項11の発明は、請求項1から請求項9までのいずれか1項に記載の電磁式アクチュエータ(10)において、前記保持手段(40)は、弾性を有し、前記第1の部材(20)及び前記第2の部材(30)の全周を覆う筒状部材(40)であることを特徴とする電磁式アクチュエータ(10)である。
【0016】
請求項12の発明は、請求項10又は請求項11に記載の電磁式アクチュエータ(10)において、前記弾性部材又は前記筒状部材(40)は、絶縁性を有することを特徴とする電磁式アクチュエータ(10)である。
【0017】
請求項13の発明は、請求項1から請求項12までのいずれか1項に記載の電磁式アクチュエータ(10)において、前記第1の部材(20)及び前記第2の部材(30)の数量は、一方が他方と同等又はそれよりも一つ少ないことを特徴とする電磁式アクチュエータ(10)である。
【0018】
請求項14の発明は、請求項1から請求項13までのいずれか1項に記載の複数の電磁式アクチュエータ(10)を並列及び/又は直列に接続することを特徴とする電磁式アクチュエータ装置である。
【発明の効果】
【0019】
以上説明したように、本発明によれば、以下のような効果がある。
(1)第1の部材は、磁力の方向を変更でき、磁力を有する第2の部材と交互に配置されているので、第1の部材の磁力の方向を変更することで、第1の部材及び第2の部材の間に引力及び斥力を発生させ、相対的に移動することができる。
(2)第1の部材及び第2の部材は電磁石であるので、各電磁石の磁力を個別に変化させることにより、電磁式アクチュエータを微細に制御することができる。
(3)第1の部材は電磁石であり、第2の部材は磁性部材であるので、応用範囲が広く、コストを抑えて電磁式アクチュエータを構成することができる。
【0020】
(4)第1の部材は電磁石であり、第2の部材は永久磁石であるので、容易に強い磁力を得ることができ、電磁式アクチュエータを効率よく駆動させることができる。
(5)電磁石は、導電性のある線材を巻いた空芯コイル及び磁性を有した芯部材により構成しているので、強力な磁力を得ることができる。
(6)電磁石に電流を流す電源制御部を備えているので、電流を微細に制御することにより磁力を微細に制御することができ、また、電流の流す方向を変えることにより磁力の方向を変更することができる。
【0021】
(7)前記電磁石は、それぞれが電源制御部に並列に接続されているので、電磁式アクチュエータの駆動推力を大きくすることができる。
(8)前記電磁石は、それぞれが電源制御部に直列に接続されているので、電磁式アクチュエータの消費電力を抑制することができる。
(9)保持手段は、第1の部材及び第2の部材の間に弾性を有する弾性部材を設けているので、弾性部材の復元力により、各部材の間隔を保持し、伸縮だけでなく捩れ方向にも自由度を持たせることができる。
【0022】
(10)保持手段は、第1の部材及び第2の部材の全周を覆う筒状部材であるので、単純な構成で第1の部材及び第2の部材を移動可能に保持することができ、また、伸縮だけでなく捩れ方向にも自由度を持たせることができる。
(11)弾性部材又は筒状部材は、絶縁性を有しているので、電磁石に流れる電流を絶縁することができる。
(12)電磁式アクチュエータ装置は、複数の電磁式アクチュエータを並列及び/又は直列に接続しているので、用途に応じてさまざまの形態をとることができる。
【発明を実施するための最良の形態】
【0023】
本発明は、微細に駆動することができ、駆動以外の方向に柔軟性がある電磁式アクチュエータ及び電磁式アクチュエータ装置を提供するという目的を、磁力を有した第1の部材及び第2の部材を、交互に配置し、保持手段により移動可能に保持し、第1の部材の磁力の方向を変化させることにより実現する。
【実施例1】
【0024】
以下、図面等を参照して、本発明の実施例をあげて、さらに詳しく説明する。
図1は、本発明による実施例1の電磁式アクチュエータの詳細を示す図である。また、図2は、本発明による実施例1の電磁式アクチュエータをロボットアームに用いた模式図である。なお、説明文中の上、下、左、右方向は、各図のそれぞれの方向に対応しているものとする。
ロボットアーム100は、図2に示すように、第1の間接部101及び第2の間接部102の間に設けられた第1の腕部104、第2の関節部102及び第3の間接部103の間に設けられた第2の腕部105、及び、第3の間接部103に設けられたハンド部106により構成され、第1の腕部104及び第2の腕部105の間に電磁式アクチュエータ10が固定された産業用ロボットのアーム部である。
第1の間接部101は、ロボットアーム100をロボット本体(図示せず)と回転可能に接続するボールジョイントである。
第2の間接部102は、第1の腕部104及び第2の腕部105を回転可能に接続するボールジョイントである。
第3の間接部103は、第2の腕部105及びハンド部106を回転可能に接続するボールジョイントである。
ハンド部106は、2本の爪部から構成され、ワークなどを挟む作業部である。
電磁式アクチュエータ10は、図2に示すように、ロボットアーム100の第2の間接部102を回転させるための駆動源であり、図1に示すように、3個の電磁石20及び2個の永久磁石30を交互に配置し、全体を筒状部材40で覆い、筒状部材40の端部に第1の端部材60及び第2の端部材61を配置することにより構成され、図1中の左右方向に伸縮することができる。また、第1の端部材60から電磁石20の配線が出され、電源制御部50に接続されている。
電磁石20は、コイル21及び鉄芯22を備えており、各コイル21は直列に接続されている。
コイル21は、導電性のある銅線が巻かれた空芯型のコイルである。
鉄芯22は、コイル21の空芯部に挿入された磁性材料である。磁性材料は、例えば、鉄である。
永久磁石30は、磁力の強いネオジウム(Ne−Fe−B系磁石)であり、図1に示すように、左右方向に着磁され、右側をN極、左側をS極としている。
筒状部材40は、弾性及び絶縁性のあるシリコンチューブであり、電磁石20及び永久磁石30に一定間隔を保てるように保持し、また、電磁式アクチュエータ10の伸縮駆動に対応して伸縮することができる。また、駆動方向以外にも曲げ及び捩れの自由度(柔軟性)がある。
電源制御部50は、電磁石20に所定の電流を送る電流制御部であり、送る電流の方向を変更することで、電磁石20から発生する磁力線の方向を変更し、永久磁石30に対し図1中の左右方向に引力及び斥力を得るように制御することができる。
第1の端部材60は、ロボットアーム100の第1の腕部104に回転可能に接続するボールジョイントである。
第2の端部材61は、ロボットアーム100の第2の腕部105に回転可能に接続するボールジョイントである。
【0025】
次に、電磁式アクチュエータ10の動作原理について説明する。
電磁式アクチュエータ10は、電源制御部50が電流を流していないときは、図1(A)に示すように、電磁石20及び永久磁石30の間が等間隔に保たれた状態で静止している。
電流制御部50により、図1(B)に示す方向(矢印A)に電流を流したときは、電磁石20のコイル21は、右端から左端へ磁力線が向かい、左端がS極となり、隣り合う永久磁石30の右端(N極)との間に引力が発生し、両者が引き合う。この引力が、各電磁石20及び永久磁石30の間で発生するので、電磁式アクチュエータ10は縮むことができる。
一方、図1(C)に示す方向(矢印B)に電流を流したときは、電磁石20のコイル21は、左端から右端へ磁力線が向かい、左端がN極となり、隣り合う永久磁石30の右端(N極)との間に斥力が発生し、両者が反発し合う。この斥力が、各電磁石20及び永久磁石30の間で発生するので、電磁式アクチュエータ10は伸びることができる。
【0026】
電磁式アクチュエータ10は、電磁石20に流す電流の量に依存して駆動力を変化させることができるので、大電流を流すことで、大駆動力を発することができる。また、コイル21の線材の径を太くしたり、永久磁石30を磁力の大きなものへと変更したりすることにより推力を増大させることも可能である。例えば、永久磁石30の残留磁束密度が約1[T]であり、電磁石20の発生磁束密度が電流1[A]を流したときに約0.09[T]である場合には、発生する引力又は斥力は約10[N]であった。
【0027】
続いて、ロボットアーム100の電磁式アクチュエータ10が取り付けられている第2の間接部102の動作方法について説明する。
電磁式アクチュエータ10は、図2に示すように、第2の間接部102を駆動するために設けられており、第1の端部材60が第1の腕部104に、第2の端部材61が第2の腕部105に接続されている。第1の端部材104から電磁式アクチュエータ10の電磁石20の配線が出され、ロボットアーム100の先端部に配線を出さないようにしているので、ロボットアーム100の先端(ハンド部106)側の配線を減らすことができ、制御特性を向上させることができる。
図2(A)は、ロボットアーム100が第2の間接部102の駆動範囲の中間にあるときであり、電磁式アクチュエータ10は、図1(A)に示す静止状態であり、第2の腕部105は、電磁式アクチュエータ10の筒状部材40の剛性により支えられている。必要に応じて、電源制御部50から電流を流し、第2の腕部105の静止安定性を向上させることができる。
【0028】
ロボットアーム100は、図2(B)に示すように、電源制御部50から所定の方向(矢印A)に電流を流すことにより電磁式アクチュエータ10を縮ませ、第2の関節部102により第1の腕部105を上方(矢印C)へ曲げることができる。また、図2(C)に示すように、図2(B)に示す電流とは逆方向(矢印B)に電流を流すことにより電磁式アクチュエータ10を伸ばし、第1の腕部105を下方(矢印D)へ曲げることができる。
【0029】
ロボットアーム100の第2の関節部102は、ボールジョイントで構成されているので、第2の腕部105が想定外の方向から外力を受けたときに、前述した電磁式アクチュエータ10により回転する(上下)方向以外にも(微小に)回転することができ、外力を受け流すことができる。例えば、第2の腕部105に何らかの外力が図2の紙面の裏から表に対して加わったときは、第2の腕部105が第2の関節部102により、図2の紙面より表側に回転する。このときに、電磁式アクチュエータ10は、第1の端部材60と第2の端部材61との間に捩れ応力が加わる。仮に、伸縮方向以外に自由度(柔軟性)がないアクチュエータを用いた場合は、アクチュエータは捩れ応力により破損する可能性があるが、本実施例では、第1の端部材60及び第2の端部材61は弾性のある筒状部材40と接続されているので、筒状部材40が弾性変形し、捩れ応力を受け流すことができる。
【0030】
以上より、実施例1の電磁式アクチュエータ10には以下のような効果がある。
(1)電磁式アクチュエータ10は、電磁石20と永久磁石30とが交互に配置されているので、電磁石20が発生する磁力の方向を変更することで、電磁石20及び永久磁石30の間に引力及び斥力を発生させ、相対的に伸縮することができる。
(2)電磁式アクチュエータ10は、電磁石20及び永久磁石30を用いているので、容易に強い磁力を得ることができ、電磁式アクチュエータ10を効率よく駆動させることができる。
【0031】
(3)電磁石20は、銅線を巻いたコイル21及び鉄芯22により構成しているので、容易に強力な磁力を得ることができる。
(4)電磁石20に電流を流す電源制御部50を備えているので、電流を微細に制御することにより磁力を微細に制御することができ、また、電流の流す方向を変えることにより磁力の方向を変更することができる。
【0032】
(5)電磁石20は、それぞれが電源制御部50に直列に接続されているので、電磁式アクチュエータ10の消費電力を抑制することができる。
(6)筒状部材40は、弾性及び絶縁性を備え、電磁石20及び永久磁石30を覆っているので、電磁石20に流れる電流を絶縁し、電磁式アクチュエータ10の伸縮方向以外に柔軟性を得ることができる。
【0033】
(変形例)
以上説明した実施例に限定されることなく、種々の変形や変更が可能であって、それらも本発明の均等の範囲内である。
(1)実施例1では、電磁式アクチュエータ10は、電磁石20及び永久磁石30により構成したが、電磁石20のみ、又は、電磁石20及び磁性部材(例えば、鉄)との組み合わせで構成してもよい。
電磁石20のみで構成した場合は、各電磁石20の発生磁力を個別に制御できるので、電磁式アクチュエータ10の駆動を微細に制御することができる。また、電磁石20及び磁性部材で構成した場合は、磁性部材に流通性の高い鉄などを使用することができるので、コストを抑えることができる。
【0034】
(2)実施例1では、各電磁石20は、直列に電源制御部50と接続されたが、並列に接続してもよい。また、並列と直列を混在させることも可能である。並列に接続することにより、大駆動力で駆動させることができる。
(3)実施例1では、筒状部材40を用いたが、電磁石20及び永久磁石30の間にゴムなどの弾性(及び絶縁性)部材を設けてもよい。
(4)実施例1では、筒状部材40にシリコンチューブを用いたが、それ以外の材料及び構造を用いてもよい。例えば、本実施例のロボットアーム100のように、図2(A)の電磁式アクチュエータ10の静止時に下方へ自重による応力がかかる場合は、網状に形成した人工繊維材を筒状にし、シリコンチューブと組み合わせることで、シリコンチューブへの応力集中を小さくすることも可能であり、可動部の耐久性を上げることもできる。また、機械のジョイント部分や自動車のシフトレバーなどに使用されるゴムブーツを使用することも可能である。
【0035】
(5)実施例1では、ロボットアーム100の第2の間接部102の駆動に電磁式アクチュエータ10を1台使用したが、複数台使用してもよい。例えば、大駆動力を出力するために2台の電磁式アクチュエータ10を並列に固定し電磁式アクチュエータ装置として使用することも可能である。
(6)実施例1では、電磁式アクチュエータ10は、3個の電磁石20及び2個の永久磁石30で構成されたが、それ以外の個数でもよい。例えば、電磁式アクチュエータ10の駆動ストロークを長く取りたい場合、又は、大駆動力を出力したい場合は、5個の電磁石20及び4個の永久磁石30とすることも可能である。
【図面の簡単な説明】
【0036】
【図1】本発明による実施例1の電磁式アクチュエータの詳細を示す図である。
【図2】本発明による実施例1の電磁式アクチュエータをロボットアームに用いた模式図である。
【符号の説明】
【0037】
10 電磁式アクチュエータ
20 電磁石
30 永久磁石
40 筒状部材
50 電源制御部
100 ロボットアーム
【特許請求の範囲】
【請求項1】
磁力を有し、前記磁力の方向を変更できる複数の第1の部材と、
前記第1の部材と交互に配置され、磁力を有する複数の第2の部材と、
前記第1の部材及び前記第2の部材を駆動範囲に移動可能に保持する保持手段と、
を備える電磁式アクチュエータ。
【請求項2】
請求項1に記載の電磁式アクチュエータにおいて、
前記第2の部材は、前記磁力の方向を変更できること、
を特徴とする電磁式アクチュエータ。
【請求項3】
請求項1又は請求項2に記載の電磁式アクチュエータにおいて、
前記第1の部材及び前記第2の部材は電磁石であること、
を特徴とする電磁式アクチュエータ。
【請求項4】
請求項1に記載の電磁式アクチュエータにおいて、
前記第1の部材は電磁石であり、前記第2の部材は磁性を有した磁性部材であること、
を特徴とする電磁式アクチュエータ。
【請求項5】
請求項1に記載の電磁式アクチュエータにおいて、
前記第1の部材は電磁石であり、前記第2の部材は永久磁石であること、
を特徴とする電磁式アクチュエータ。
【請求項6】
請求項3から請求項5までのいずれか1項に記載の電磁式アクチュエータにおいて、
前記電磁石は、導電性のある線材を巻いた空芯コイルと、
前記空芯コイルの空芯部に挿入され、磁性を有した芯部材とを備えること、
を特徴とする電磁式アクチュエータ。
【請求項7】
請求項3から請求項6までのいずれか1項に記載の電磁式アクチュエータにおいて、
前記電磁石に電流を流す電源制御部を備えること、
を特徴とする電磁式アクチュエータ。
【請求項8】
請求項7に記載の電磁式アクチュエータにおいて、
前記電磁石は、それぞれが前記電源制御部に並列に接続されること、
を特徴とする電磁式アクチュエータ。
【請求項9】
請求項7に記載の電磁式アクチュエータにおいて、
前記電磁石は、それぞれが前記電源制御部に直列に接続されること、
を特徴とする電磁式アクチュエータ。
【請求項10】
請求項1から請求項9までのいずれか1項に記載の電磁式アクチュエータにおいて、
前記保持手段は、弾性を有し、前記第1の部材及び前記第2の部材の間に設けられる弾性部材であること、
を特徴とする電磁式アクチュエータ。
【請求項11】
請求項1から請求項9までのいずれか1項に記載の電磁式アクチュエータにおいて、
前記保持手段は、弾性を有し、前記第1の部材及び前記第2の部材の全周を覆う筒状部材であること、
を特徴とする電磁式アクチュエータ。
【請求項12】
請求項10又は請求項11に記載の電磁式アクチュエータにおいて、
前記弾性部材又は前記筒状部材は、絶縁性を有すること、
を特徴とする電磁式アクチュエータ。
【請求項13】
請求項1から請求項12までのいずれか1項に記載の電磁式アクチュエータにおいて、
前記第1の部材及び前記第2の部材の数量は、一方が他方と同等又はそれよりも一つ少ないこと、
を特徴とする電磁式アクチュエータ。
【請求項14】
請求項1から請求項13までのいずれか1項に記載の複数の電磁式アクチュエータを並列及び/又は直列に接続すること、
を特徴とする電磁式アクチュエータ装置。
【請求項1】
磁力を有し、前記磁力の方向を変更できる複数の第1の部材と、
前記第1の部材と交互に配置され、磁力を有する複数の第2の部材と、
前記第1の部材及び前記第2の部材を駆動範囲に移動可能に保持する保持手段と、
を備える電磁式アクチュエータ。
【請求項2】
請求項1に記載の電磁式アクチュエータにおいて、
前記第2の部材は、前記磁力の方向を変更できること、
を特徴とする電磁式アクチュエータ。
【請求項3】
請求項1又は請求項2に記載の電磁式アクチュエータにおいて、
前記第1の部材及び前記第2の部材は電磁石であること、
を特徴とする電磁式アクチュエータ。
【請求項4】
請求項1に記載の電磁式アクチュエータにおいて、
前記第1の部材は電磁石であり、前記第2の部材は磁性を有した磁性部材であること、
を特徴とする電磁式アクチュエータ。
【請求項5】
請求項1に記載の電磁式アクチュエータにおいて、
前記第1の部材は電磁石であり、前記第2の部材は永久磁石であること、
を特徴とする電磁式アクチュエータ。
【請求項6】
請求項3から請求項5までのいずれか1項に記載の電磁式アクチュエータにおいて、
前記電磁石は、導電性のある線材を巻いた空芯コイルと、
前記空芯コイルの空芯部に挿入され、磁性を有した芯部材とを備えること、
を特徴とする電磁式アクチュエータ。
【請求項7】
請求項3から請求項6までのいずれか1項に記載の電磁式アクチュエータにおいて、
前記電磁石に電流を流す電源制御部を備えること、
を特徴とする電磁式アクチュエータ。
【請求項8】
請求項7に記載の電磁式アクチュエータにおいて、
前記電磁石は、それぞれが前記電源制御部に並列に接続されること、
を特徴とする電磁式アクチュエータ。
【請求項9】
請求項7に記載の電磁式アクチュエータにおいて、
前記電磁石は、それぞれが前記電源制御部に直列に接続されること、
を特徴とする電磁式アクチュエータ。
【請求項10】
請求項1から請求項9までのいずれか1項に記載の電磁式アクチュエータにおいて、
前記保持手段は、弾性を有し、前記第1の部材及び前記第2の部材の間に設けられる弾性部材であること、
を特徴とする電磁式アクチュエータ。
【請求項11】
請求項1から請求項9までのいずれか1項に記載の電磁式アクチュエータにおいて、
前記保持手段は、弾性を有し、前記第1の部材及び前記第2の部材の全周を覆う筒状部材であること、
を特徴とする電磁式アクチュエータ。
【請求項12】
請求項10又は請求項11に記載の電磁式アクチュエータにおいて、
前記弾性部材又は前記筒状部材は、絶縁性を有すること、
を特徴とする電磁式アクチュエータ。
【請求項13】
請求項1から請求項12までのいずれか1項に記載の電磁式アクチュエータにおいて、
前記第1の部材及び前記第2の部材の数量は、一方が他方と同等又はそれよりも一つ少ないこと、
を特徴とする電磁式アクチュエータ。
【請求項14】
請求項1から請求項13までのいずれか1項に記載の複数の電磁式アクチュエータを並列及び/又は直列に接続すること、
を特徴とする電磁式アクチュエータ装置。
【図1】


【図2】
【図2】
【公開番号】特開2007−296612(P2007−296612A)
【公開日】平成19年11月15日(2007.11.15)
【国際特許分類】
【出願番号】特願2006−127248(P2006−127248)
【出願日】平成18年5月1日(2006.5.1)
【出願人】(000002897)大日本印刷株式会社 (14,506)
【Fターム(参考)】
【公開日】平成19年11月15日(2007.11.15)
【国際特許分類】
【出願日】平成18年5月1日(2006.5.1)
【出願人】(000002897)大日本印刷株式会社 (14,506)
【Fターム(参考)】
[ Back to top ]