
電磁振動式搬送装置の制御装置及びその制御装置を備えた搬送装置を有する計量装置
【課題】 搬送部に所望される駆動周波数を迅速に決定することができる電磁振動式搬送装置の制御装置及びその制御装置を備えた搬送装置を有する計量装置を提供する。
【解決手段】 電磁石が設けられた本体部と、該本体部に対して弾性部材を介して振動可能に支持されて前記電磁石の通電時に吸引される磁性体が設けられた搬送部と、前記電磁石に間欠的に通電することにより前記搬送部を印加した駆動周波数で振動させる制御手段とを有する電磁振動式搬送装置の制御装置であって、前記搬送部を自由振動させる手段と、搬送部の自由振動時に前記電磁石に発生する誘導起電力を測定する測定手段と、該測定手段により測定された誘導起電力の振動数を前記搬送部の固有振動数とする固有振動数設定手段とが備えられ、かつ、前記制御手段は、前記固有振動数設定手段で設定された固有振動数に基いて駆動周波数を設定する。
【解決手段】 電磁石が設けられた本体部と、該本体部に対して弾性部材を介して振動可能に支持されて前記電磁石の通電時に吸引される磁性体が設けられた搬送部と、前記電磁石に間欠的に通電することにより前記搬送部を印加した駆動周波数で振動させる制御手段とを有する電磁振動式搬送装置の制御装置であって、前記搬送部を自由振動させる手段と、搬送部の自由振動時に前記電磁石に発生する誘導起電力を測定する測定手段と、該測定手段により測定された誘導起電力の振動数を前記搬送部の固有振動数とする固有振動数設定手段とが備えられ、かつ、前記制御手段は、前記固有振動数設定手段で設定された固有振動数に基いて駆動周波数を設定する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、物品を搬送する搬送装置、より詳しくは、電磁的方法で物品の搬送部を振動させて物品を搬送する機能を有する電磁振動式搬送装置の制御装置及びその制御装置を備えた搬送装置を有する計量装置に関し、物品搬送の技術分野に属する。
【背景技術】
【0002】
従来、物品を搬送する搬送装置において、物品を載置するトラフ等の搬送部を物品の搬送のために電磁的な方法で振動させる機能を有した各種フィーダが知られている。例えば、計量装置等に物品を分散供給するフィーダとしては、装置本体に板バネを介して振動可能に支持されていると共に、磁性体が設けられたトラフを有し、装置本体側に設けられた電磁石に間欠的に通電して物品搬送を行うものがある。これは、電磁石に通電させて前記磁性体を吸引させた後、通電を停止させて前記板バネを反発力で復元させることを繰り返してトラフを所定の周波数で振動させて、物品を搬送するものである。
【0003】
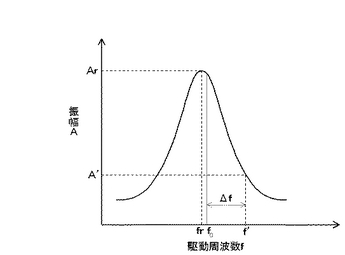
ここで、図4は、電磁石に印加する電力パルスの発生周波数(以下、駆動周波数fという)を変化(周波数スイープ)させたときの搬送部の振幅Aの変化曲線を示す。搬送部の振動の振幅Aは、駆動周波数f及び電磁石へ印加する電力により決定される。この曲線の極大値Arをとる周波数が搬送部の共振周波数frであり、共振周波数frと搬送部の固有振動数f0とはほぼ一致する値をとる。そして、図5に示すように振幅Aに対して変化することが知られている。駆動周波数fは、大きな振幅Aを得るために共振周波数frまたは固有振動数f0の近傍に設定されることがある。また、図4に示したように、所望の振幅A′を実現するためには、f′−f0(=Δf)が確定する。そして、Δfが決まった上で、f′を決定するためにはf′=f0+Δfに従ってf0を知る必要がある。
【0004】
ところで、駆動周波数を共振周波数の近傍に設定する方法として特許文献1または特許文献2に開示された方法がある。すなわち、特許文献1に開示された方法は、搬送部の駆動周波数に対する振動加速度つまり振幅と消費電力との変化曲線が相似形であることに着目し、印加電圧を一定にした状態で駆動周波数を変化させ、印加電力が最大になる周波数を共振周波数としている。また、特許文献2においては、ある駆動周波数で電磁石に通電させながら、所定周期ごとに一時的に通電を休止させ、この休止期間中に慣性で振動を続ける搬送部により電磁石のコイルに発生した誘導起電圧を測定し、これを所定周波数の範囲内で変化させながら繰り返し、測定した誘導起電圧が最大となったときの駆動周波数を共振周波数としている。
【0005】
一方、駆動周波数を固有振動数の近傍に設定する方法として特許文献3に開示された方法がある。これによると、駆動電流を測定し、コイルに流れる電流が予め設定された基準電流値を超えている時間幅に基づいて駆動周波数を設定し、この時間幅が基準幅を超えたときに駆動周波数を固有振動数に近いものとして実動周波数に設定している。
【0006】
なお、前記特許文献1〜3には共振周波数または固有振動数近傍の駆動周波数で搬送部を振動させる方法について開示されているが、前述のように所望される振幅A′を得る目的で駆動周波数fをΔfずらす他、搬送部に物品が載置されたときに物品の重量により搬送部の共振周波数または固有振動数が変化して振幅が急激に減少することがあり、これを抑制するために敢えて駆動周波数を共振周波数または固有振動数からずらすことや、逆に、搬送する物品の重量に応じて、共振周波数または固有振動数が得られるように駆動周波数を予めずらして設定することもある。
【0007】
【特許文献1】特許第2770295号公報
【特許文献2】特開2002−128261号公報
【特許文献3】特開2002−145436号公報
【発明の開示】
【発明が解決しようとする課題】
【0008】
ところで、前記特許文献1〜3に記載の方法は、いずれも駆動周波数を所定範囲内で変化させながら電力や電圧を測定しており、所望される駆動周波数の設定作業に長い時間を要する。さらに、所定範囲内に共振周波数または固有振動数が存在しない場合もある。従って、特に複数のフィーダが備えられている計量装置等の場合には、各フィーダの駆動周波数の設定に時間を要し、作業効率の大幅な低下が懸念される。
【0009】
そこで、本発明は、搬送部に所望される駆動周波数を迅速に決定することができる電磁振動式搬送装置の制御装置及びその制御装置を備えた搬送装置を有する計量装置を提供することを課題とする。
【課題を解決するための手段】
【0010】
前記課題を解決するため、本発明は次のように構成したことを特徴とする。
【0011】
まず、請求項1に記載の発明は、電磁石が設けられた本体部と、該本体部に対して弾性部材を介して振動可能に支持されて前記電磁石の通電時に吸引される磁性体が設けられた搬送部と、前記電磁石に間欠的に通電することにより前記搬送部を印加した駆動周波数で振動させる制御手段とを有する電磁振動式搬送装置の制御装置であって、前記搬送部を自由振動させる手段と、搬送部の自由振動時に前記電磁石に発生する誘導起電力を測定する測定手段と、該測定手段により測定された誘導起電力の振動数を前記搬送部の固有振動数とする固有振動数設定手段とが備えられ、かつ、前記制御手段は、前記固有振動数設定手段で設定された固有振動数に基いて駆動周波数を設定することを特徴とする。
【0012】
次に、請求項2に記載の発明は、前記請求項1に記載の電磁振動式搬送装置の制御装置において、前記自由振動を発生させる手段は、前記搬送部に衝撃を与えることを特徴とする。
【0013】
次に、請求項3に記載の発明は、前記請求項2に記載の電磁振動式搬送装置の制御装置において、前記搬送部に与える衝撃は、電気的なインパルス信号による電磁力であることを特徴とする。
【0014】
次に、請求項4に記載の発明は、前記請求項2に記載の電磁振動式搬送装置の制御装置において、前記搬送部に与える衝撃は、物理的な外力であることを特徴とする。
【0015】
次に、請求項5に記載の発明は、前記請求項1から請求項4のいずれかに記載の電磁振動式搬送装置の制御装置において、所定時間内に誘導起電力がゼロになる回数、または誘導起電力がゼロになる時間間隔を検出することによって誘導起電力の振動数が演算されることを特徴とする。
【0016】
次に、請求項6に記載の発明は、前記請求項1から請求項5のいずれかに記載の電磁振動式搬送装置の制御装置において、前記制御手段は、測定された固有振動数を補正し、補正された値に基づいて駆動周波数を設定することを特徴とする。
【0017】
そして、請求項7に記載の発明は、物品を計量する計量装置であって、電磁石が設けられた本体部と、該本体部に対して弾性部材を介して振動可能に支持されて前記電磁石の通電時に吸引される磁性体が設けられた搬送部と、前記電磁石に間欠的に通電することにより前記搬送部を印加した駆動周波数で振動させる制御手段とを有する電磁振動式搬送装置と、請求項1から請求項6のいずれかに記載の電磁振動式搬送装置の制御装置と、前記電磁振動式搬送装置によって搬送された物品を受け入れ計量する計量手段とが備えられていることを特徴とする。
【発明の効果】
【0018】
搬送部は、自由振動時には所定の固有振動数で振動し、固有振動数f0は共振周波数frに非常に近い値である。ここで、搬送部の固有振動数は数式により算出することができるが、搬送部は板バネや本体側への振動伝達を遮断するコイルスプリング等を有する多自由度系である上、非線形性の要因となる板バネの材質などを含むので、数式によってこれを算出することは困難である。そのため、一般に搬送部の固有振動数を求める際には、インパルスを入力したときの振動を各種アナライザ、例えば加速度検出器などにより検出した波形などに基づいてFFT(フーリエ変換)を行うことにより算出することになる。また、固有振動数は振幅に対して変化するので、正確に求めるためには振幅も同時に測定し補正をしなければならない。
【0019】
そこで、請求項1に記載の発明によれば、搬送部を自由振動させて、このときに電磁石のコイルに発生する誘導起電力を測定し、測定した誘導起電力の振動数を搬送部の固有振動数とし、この固有振動数に基いて駆動周波数を設定することにより、駆動周波数を迅速に所望する周波数に設定することができる。すなわち、自由振動により発生する誘導起電力の振動数は、搬送部の固有振動数と一致している。さらに、振幅の小さな状態でこれを行えば振幅による変化を小さくして固有振動数を得ることができる。このように簡単かつ迅速に搬送部の固有振動数を知ることができる。このとき、測定した誘導起電力は、精度良いFFTを行うために十分な波形を確保することができるので、これに基づいて設定した駆動周波数は精度が良い。
【0020】
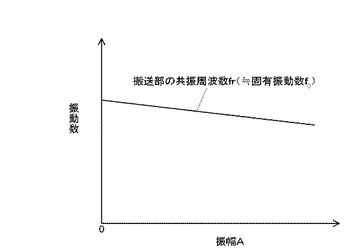
次に、請求項2に記載の発明によれば、搬送部の自由振動においては、図5にあるように、振幅Aが小さいほどずれが小さく、搬送部の自由振動は、振動部に衝撃を与えることによって発生させるので、振幅の小さい状態での測定が可能となり、精度の良い固有振動数を得ることができる。
【0021】
次に、請求項3に記載の発明によれば、搬送部に与える衝撃を電気的なインパルス信号(短時間かつ高電圧の信号)により発生する電磁石の電磁力により得るので、既存の電気回路を用いてこれを行うことができ、測定手順及び装置の簡素化を図ることができる。
【0022】
次に、請求項4に記載の発明によれば、搬送部に与える衝撃を物理的な外力により発生させることによって、簡単に搬送部を自由振動させることができる。このとき、物理的な外力は、ハンマリング装置等を用いて機械的に行うものや、手動でハンマリングを行うものが挙げられる。特に、手動によりハンマリングを行う構成は、誰でも簡単にこれを行うことができると共に、装置の簡素化を図ることができる。
【0023】
次に、請求項5に記載の発明によれば、所定時間内に誘導起電力がゼロになる回数を求め、これに基いて誘導起電力の振動数を演算することができ、または誘導起電力がゼロになる時間間隔を検出することによって振動の周期を求め、この周期の逆数をとることにより誘導起電力の振動数の値が得られる。これら方法によると、誘導起電力の波形を厳密に検出するような複雑な検出回路及びFFTを用いることなく、精度よく誘導起電力の振動数を演算することができる。
【0024】
次に、請求項6に記載の発明によれば、搬送部上の物品の重量や、図4を基にして測定時の振幅に従って固有振動数の加減等の補正を行うことによって、より正確な固有振動数を求めることができる。重いものを搬送する場合はワークの重量に基づいて固有振動数を補正することも有効である。
【0025】
そして、請求項7に記載の発明によれば、前記請求項1〜6に記載の電磁振動式搬送装置と該搬送装置の制御装置とを有する計量装置は、搬送部の駆動周波数を所望の周波数に迅速に設定することができ、作業効率を向上することができる。
【0026】
そして、それぞれの搬送部は、その個体差により、図4に示す曲線をほぼ横軸方向にずらしたものとして駆動周波数に応じた振幅の特性が表される。ここで、複数の電磁振動式搬送装置及び計量手段が備えられた組合せ計量装置等の場合は、各搬送部に対して前記のように固有振動数を求めて、各固有振動数に同じ数値で加減等を行うことによって、簡単に各搬送部の振動の振幅を統一的に制御することができる。これによって、各搬送部の駆動周波数を決定するための装置構成を簡素化することができ、作業効率が向上する。
【発明を実施するための最良の形態】
【0027】
以下、本発明の実施の形態について説明する。
【0028】
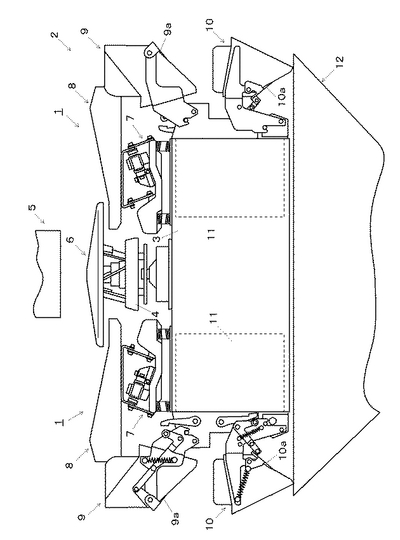
図1は、電磁フィーダ1を備えた組合せ計量装置2の概略の構成を示す。この組合せ計量装置2には、機台3の中央に加振機4を介して設置され、上方の筒状の投入シュート5から投下された物品を周囲に分散する分散テーブル6と、その周囲にそれぞれ加振機7…7を介して放射状に配設され、物品を搬送する複数のトラフ8…8と、これらのトラフ8…8の先端部下方にそれぞれ位置するように円形に配設された複数のプールホッパ9…9と、それぞれのプールホッパ9…9の下方に配設された計量ホッパ10…10とが設けられている。ここで、電磁フィーダ1は、前記加振機7及びトラフ8を含む。
【0029】
そして、前記機台3の内部には、これらのプールホッパ9…9のゲート9a…9a及び計量ホッパ10…10のゲート10a…10aの開閉を制御するゲート開閉装置11…11が配設されている。このゲート開閉装置11は、モータ(図示せず)により駆動され、物品排出指令を受けたときに、図示しない駆動手段により計量ホッパ10内の物品を集合シュート12内に排出させ、空になった該計量ホッパ10内にプールホッパ9内の物品を投入させるように動作する。また、この計量ホッパ10には、図示しない重量検出器が機台3内で連設されており、計量ホッパ10内の物品の重量を計量する。
【0030】
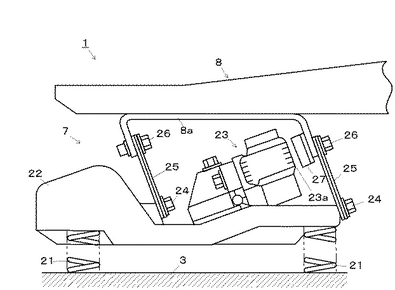
前記電磁フィーダ1の加振機7は、図2に示すように、前記機台3に複数のコイルスプリング21…21を介して設置されるベース部材22と、該ベース部材22の上面に設置された電磁石23と、前記ベース部材22の後部側(図面左側)及び前部側(図面右側)にボルト24…24によって後傾姿勢で取り付けられた一対の板バネ25,25とを有する。これら両板バネ25,25の上部には、前記トラフ8のブラケット8aがボルト26…26で固定されている。また、該ブラケット8aにおける前記電磁石23の磁力発生面23aに対向する面には、磁性体27が取り付けられている。前記電磁石23には、後述する制御手段32を介して間欠的に通電される。
【0031】
これによれば、電磁石23に通電すると、前記磁力発生面23aと磁性体27との間に電磁力(吸引)が作用し、この結果、前後の板バネ25,25が後方にさらに後傾しながら、またこれと同時にトラフ8がやや沈み込みながら、後方に(図面左側に)変位することとなる。一方、電磁石23への通電が停止されると、前記磁力発生面23aと磁性体27との間の電磁力(吸引)が消失し、前記トラフ8が、板バネ25,25の弾性復元力により上方へやや浮き上がりながら前方に(図面右側に)変位することとなる。すなわち、前記電磁石23に間欠的に繰り返し通電すれば、間欠的に電磁力が発生し、トラフ8が前後方向に振動し、もってトラフ8上の物品は前方に搬送されることとなる。
【0032】
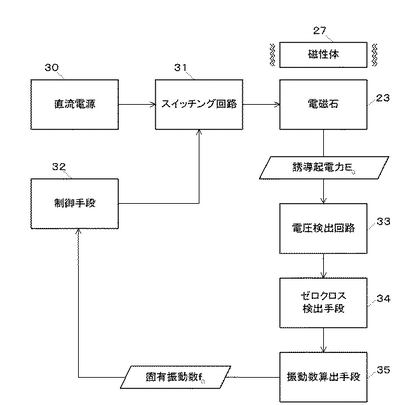
図3は、トラフ8の振動を制御する制御系統を示すブロック図である。すなわち、この制御系統には、前記電磁石23の電力供給源としての直流電源30と、制御パルスが印加されている期間に導通状態となって直流電源を電磁石に通電させるFET(電界効果型トランジスタ)等で構成されるスイッチング回路31と、該スイッチング回路31による通電の発生周期やパルス幅等を制御する制御手段32と、電磁石23に発生した誘導起電力E0を検出する電圧検出回路33と、誘導起電力E0がゼロになる(正負が反転する)時刻を検出するゼロクロス検出手段34と、該ゼロクロス検出手段34で検出した電圧がゼロになる時刻に基いて誘導起電力E0の振動数fEを算出すると共にこの振動数fEをトラフ8の固有振動数f0として前記制御手段32に入力する振動数算出手段35とが備えられている。
【0033】
ところで、トラフ8の振動の振幅Aは、駆動周波数f及び電磁石23へ印加する電力の大きさにより決定される。そして、図4に示すようにこの曲線の極大値Arをとる周波数が共振周波数frであり、この共振周波数frでトラフ8を振動させたときに最も大きな振幅Arが得られる。
【0034】
固有振動数f0は、トラフ8の自由振動時の振動数であり、これは共振周波数frとほぼ一致するパラメータである。
【0035】
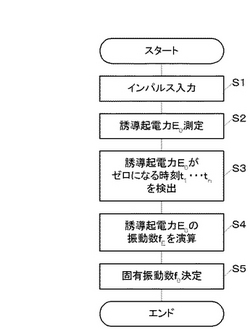
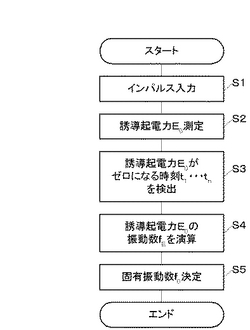
以下、本発明に係るフィーダ7における固有振動数f0を求める手順を図6に示すフローチャート及び図7に示すタイムチャートを用いて説明する。
【0036】
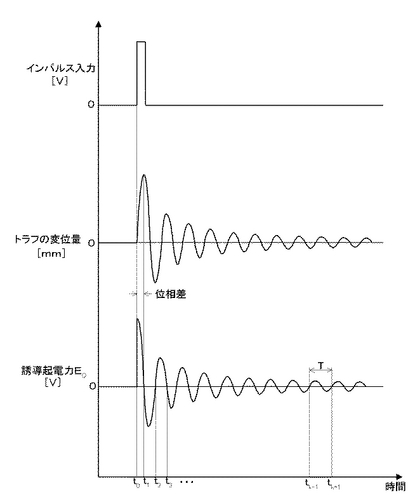
まず、ステップS1で電磁石23に短時間の高電圧を印加することによってインパルス入力を行い、トラフ8を自由振動させる。図7に示すように、時刻t0でインパルス入力が行われた後、自由振動によるトラフ8の変位量の時間的変化は、正弦波の減衰曲線で表される。次に、ステップS2で、トラフ8の自由振動により電磁石23に発生する誘導起電力E0を電圧検出回路33により検出する。
【0037】
【数1】

【0038】
そして電圧検出回路33では、図7に示すような誘導起電力E0の振動曲線が得られる。この曲線は、ステップS1でインパルス入力が行われた後の、正弦波の減衰曲線として表される。なお、誘導起電力E0の振動の位相は、トラフ8の変位量の位相をコイルの特性に従ってある一定角度遅らせたものになり(図7参照)、誘導起電力E0とトラフ8の変位量は、同一周波数で振動することになる。
【0039】
次に、ステップS3において、前記ステップS2で測定した誘導起電力E0がゼロになる時刻t1…tnをゼロクロス検出手段34により検出する。
【0040】
そして、ステップS4において、誘導起電力E0の振動数fEを演算する。ここで、前記ステップS3で検出したゼロクロス時刻t1…tnのうちで振動の減衰により誘導起電力E0の振幅が測定可能範囲内になったときのゼロクロス時刻tkー1、tk+1を選択して、これに基いて誘導起電力E0の振動周期Tを演算する。そして、この周期Tの逆数をとることにより誘導起電力E0の振動数fEを算出する。そして、ステップS5で、ステップS4で演算した誘導起電力E0の振動数fEをトラフの固有振動数f0として決定する。なお、ステップS2〜S5の手順は、アナログ信号による検出、AD変換器を用いたデジタル信号による検出のいずれの手段においても実現することができる。
【0041】
そして、同様の方法で他のトラフ8…8についても固有振動数f0を求め、全てのトラフ8…8について所望の振幅Aが得られるように、駆動周波数fを調整する。すなわち、トラフ8の振幅Aは、図4に示したような特性を有しているので、任意のトラフ8において、固有振動数f0を算出した後、駆動周波数fを駆動周波数f′に調整し、所望の振幅A′が得られたときに、そのときの駆動周波数f′と固有振動数f0との差Δfを測定する。そして、他のトラフ8…8においてもそれぞれの固有振動数f0から前記と同様の差Δfになる駆動周波数fに設定する。あるいは、あるトラフで所望のA′が得られたときにΔf=f′/f0を求めておき、他のトラフでf0にΔfを乗じてf′を設定してもよい。その他の実現方法は、周知慣用技術の範囲で可能である。
【0042】
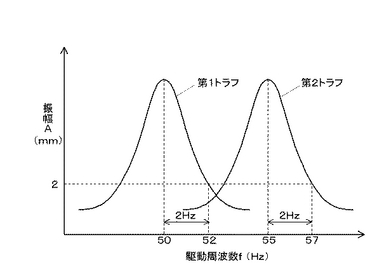
例えば、図8に示すように、例えば第1トラフにおいて前記の手順で求めた固有振動数が50Hzで、これを正の方向に2Hzずらした駆動周波数(52Hz)としたときに、所望のトラフの振幅(2mm)が得られた場合を考える。第2トラフの固有振動数は55Hzで、これを同様に正の方向に2Hzずらした駆動周波数(57Hz)としたときに、ほぼ振幅2mmの振動が得られる。これは各トラフ8…8の個体差が、駆動周波数fに対する振幅特性を示す曲線をほぼ横軸方向にずらしたものとして表されるからである。このように、全てのトラフ8…8において、それぞれの駆動周波数fをそれぞれの固有振動数から第1トラフでずらした値2Hz分増加させて設定することにより、全てのトラフ8…8の振動の振幅Aを統一的にほぼ2mmに制御することができる。
【0043】
以上のように、トラフ8を自由振動させて、このときに電磁石23のコイルに発生する誘導起電力E0を測定し、測定した誘導起電力E0の振動数fEをトラフ8の固有振動数f0とし、この固有振動数f0に基いて駆動周波数fを設定することにより、駆動周波数fを迅速に所望の周波数に設定することができる。このとき、トラフ8を振幅の小さな状態で自由振動させることにより生じる誘導起電力E0により測定される固有振動数f0は、振幅が小さければわずかな補正で済む。このように簡単かつ迅速にトラフ8の固有振動数f0を知ることができる。そして、駆動周波数fをトラフ8の固有振動数f0に基いて設定することによって、物品搬送の効率化を図ることができる。振幅の小さな自由振動では、測定した誘導起電力E0は、精度良いFFTを行うために十分な波形を確保することができるので、これに基づいて設定した駆動周波数fは精度が良い。
【0044】
一方、トラフ8の自由振動は、トラフ8に衝撃を与えることによって発生させるので、振幅Aの小さい状態での測定が可能となり、精度の良い固有振動数f0の値を得ることができる。
【0045】
また、トラフ8に与える衝撃は、電気的なインパルス信号(短期間かつ高電圧)により発生する電磁石23の電磁力により得られるので、既存の電気回路を用いてこれを行うことができ、測定手順及び装置の簡素化を図ることができる。
【0046】
なお、トラフ8に与える衝撃を物理的な外力により発生させることによって、簡単にトラフ8を自由振動させることもできる。物理的な外力は、ハンマリング装置等を用いて機械的に行うものや、手動でハンマリングを行うものが挙げられる。特に、手動によりハンマリングを行う構成は、誰でも簡単にこれを行うことができると共に、装置の簡素化を図ることができるという利点を有する。
【0047】
一方、前記のように、ゼロクロス検出手段34により誘導起電力E0のゼロクロス時刻を検出し、この時刻に基いて誘導起電力E0の周期Tを求め、この周期Tの逆数をとることによって簡単に誘導起電力E0の振動数fEを算出することができる。その結果、誘導起電力E0の波形を厳密に検出するような複雑な検出回路またはFFTを用いることなく、精度よく誘導起電力E0の振動数fEを算出することができる。なお、所定時間内に誘導起電力E0がゼロになる回数を検出し、これに基いて誘導起電力E0の振動数fEを算出することもできる。すなわち、検出したゼロクロス回数を所定時間で除算して、1秒間にゼロクロスする回数に基いて誘導起電力V0の振動数fEを算出することができる。
【0048】
また、トラフ8上の物品の重量や、図4を基にして測定時の振幅Aに従って固有振動数f0の加減等の補正を行うことによって、より正確な固有振動数f0を求めることができる。重いものを搬送する場合はワークの重量に基づいて固有振動数f0を補正することも有効である。
【0049】
さらに、本実施の形態のように、複数の電磁フィーダ1…1が備えられた組合せ計量装置2の場合は、各トラフ8に対して前記のように固有振動数f0を求めて、各固有振動数f0に同じ数値の加減等を行うことによって、簡単に各トラフ8の振幅Aを統一的に制御することができる。これによって、各トラフ8の駆動周波数fを設定するための装置構成簡素化することができ、作業効率が向上する。
【産業上の利用可能性】
【0050】
本発明は、搬送部に所望される駆動周波数を迅速に決定することができる電磁振動式搬送装置の制御装置及びその制御装置を備えた搬送装置を有する計量装置を提供する。本発明は、物品を搬送する搬送装置、より詳しくは、電磁的方法で物品の搬送部を振動させて物品を搬送する機能を有する電磁振動式搬送装置の制御装置及びその制御装置を備えた搬送装置を有する計量装置に関し、物品搬送の技術分野に広く好適である。
【図面の簡単な説明】
【0051】
【図1】本発明の実施の形態に係る組合せ計量装置の概略側面図である。
【図2】同電磁フィーダの側面図である。
【図3】同電磁フィーダの制御系統を示すブロック図である。
【図4】トラフの駆動周波数に対する振幅特性を示す図である。
【図5】振動と共振周波数・固有振動数の関係を示す図である。
【図6】固有振動数の決定手順を示すフローチャートである。
【図7】インパルス入力により発生するトラフの変位量及び誘導起電力の変化を示すタイムチャートである。
【図8】トラフの振幅制御の説明図である。
【符号の説明】
【0052】
1 電磁振動式搬送装置(電磁フィーダ)
2 組合せ計量装置
3 本体部(架台)
8 搬送部(トラフ)
23 電磁石
25 弾性部材(板バネ)
27 磁性体
32 制御手段
33 測定手段(電圧検出回路)
35 固有振動数設定手段(振動数算出手段)
【技術分野】
【0001】
本発明は、物品を搬送する搬送装置、より詳しくは、電磁的方法で物品の搬送部を振動させて物品を搬送する機能を有する電磁振動式搬送装置の制御装置及びその制御装置を備えた搬送装置を有する計量装置に関し、物品搬送の技術分野に属する。
【背景技術】
【0002】
従来、物品を搬送する搬送装置において、物品を載置するトラフ等の搬送部を物品の搬送のために電磁的な方法で振動させる機能を有した各種フィーダが知られている。例えば、計量装置等に物品を分散供給するフィーダとしては、装置本体に板バネを介して振動可能に支持されていると共に、磁性体が設けられたトラフを有し、装置本体側に設けられた電磁石に間欠的に通電して物品搬送を行うものがある。これは、電磁石に通電させて前記磁性体を吸引させた後、通電を停止させて前記板バネを反発力で復元させることを繰り返してトラフを所定の周波数で振動させて、物品を搬送するものである。
【0003】
ここで、図4は、電磁石に印加する電力パルスの発生周波数(以下、駆動周波数fという)を変化(周波数スイープ)させたときの搬送部の振幅Aの変化曲線を示す。搬送部の振動の振幅Aは、駆動周波数f及び電磁石へ印加する電力により決定される。この曲線の極大値Arをとる周波数が搬送部の共振周波数frであり、共振周波数frと搬送部の固有振動数f0とはほぼ一致する値をとる。そして、図5に示すように振幅Aに対して変化することが知られている。駆動周波数fは、大きな振幅Aを得るために共振周波数frまたは固有振動数f0の近傍に設定されることがある。また、図4に示したように、所望の振幅A′を実現するためには、f′−f0(=Δf)が確定する。そして、Δfが決まった上で、f′を決定するためにはf′=f0+Δfに従ってf0を知る必要がある。
【0004】
ところで、駆動周波数を共振周波数の近傍に設定する方法として特許文献1または特許文献2に開示された方法がある。すなわち、特許文献1に開示された方法は、搬送部の駆動周波数に対する振動加速度つまり振幅と消費電力との変化曲線が相似形であることに着目し、印加電圧を一定にした状態で駆動周波数を変化させ、印加電力が最大になる周波数を共振周波数としている。また、特許文献2においては、ある駆動周波数で電磁石に通電させながら、所定周期ごとに一時的に通電を休止させ、この休止期間中に慣性で振動を続ける搬送部により電磁石のコイルに発生した誘導起電圧を測定し、これを所定周波数の範囲内で変化させながら繰り返し、測定した誘導起電圧が最大となったときの駆動周波数を共振周波数としている。
【0005】
一方、駆動周波数を固有振動数の近傍に設定する方法として特許文献3に開示された方法がある。これによると、駆動電流を測定し、コイルに流れる電流が予め設定された基準電流値を超えている時間幅に基づいて駆動周波数を設定し、この時間幅が基準幅を超えたときに駆動周波数を固有振動数に近いものとして実動周波数に設定している。
【0006】
なお、前記特許文献1〜3には共振周波数または固有振動数近傍の駆動周波数で搬送部を振動させる方法について開示されているが、前述のように所望される振幅A′を得る目的で駆動周波数fをΔfずらす他、搬送部に物品が載置されたときに物品の重量により搬送部の共振周波数または固有振動数が変化して振幅が急激に減少することがあり、これを抑制するために敢えて駆動周波数を共振周波数または固有振動数からずらすことや、逆に、搬送する物品の重量に応じて、共振周波数または固有振動数が得られるように駆動周波数を予めずらして設定することもある。
【0007】
【特許文献1】特許第2770295号公報
【特許文献2】特開2002−128261号公報
【特許文献3】特開2002−145436号公報
【発明の開示】
【発明が解決しようとする課題】
【0008】
ところで、前記特許文献1〜3に記載の方法は、いずれも駆動周波数を所定範囲内で変化させながら電力や電圧を測定しており、所望される駆動周波数の設定作業に長い時間を要する。さらに、所定範囲内に共振周波数または固有振動数が存在しない場合もある。従って、特に複数のフィーダが備えられている計量装置等の場合には、各フィーダの駆動周波数の設定に時間を要し、作業効率の大幅な低下が懸念される。
【0009】
そこで、本発明は、搬送部に所望される駆動周波数を迅速に決定することができる電磁振動式搬送装置の制御装置及びその制御装置を備えた搬送装置を有する計量装置を提供することを課題とする。
【課題を解決するための手段】
【0010】
前記課題を解決するため、本発明は次のように構成したことを特徴とする。
【0011】
まず、請求項1に記載の発明は、電磁石が設けられた本体部と、該本体部に対して弾性部材を介して振動可能に支持されて前記電磁石の通電時に吸引される磁性体が設けられた搬送部と、前記電磁石に間欠的に通電することにより前記搬送部を印加した駆動周波数で振動させる制御手段とを有する電磁振動式搬送装置の制御装置であって、前記搬送部を自由振動させる手段と、搬送部の自由振動時に前記電磁石に発生する誘導起電力を測定する測定手段と、該測定手段により測定された誘導起電力の振動数を前記搬送部の固有振動数とする固有振動数設定手段とが備えられ、かつ、前記制御手段は、前記固有振動数設定手段で設定された固有振動数に基いて駆動周波数を設定することを特徴とする。
【0012】
次に、請求項2に記載の発明は、前記請求項1に記載の電磁振動式搬送装置の制御装置において、前記自由振動を発生させる手段は、前記搬送部に衝撃を与えることを特徴とする。
【0013】
次に、請求項3に記載の発明は、前記請求項2に記載の電磁振動式搬送装置の制御装置において、前記搬送部に与える衝撃は、電気的なインパルス信号による電磁力であることを特徴とする。
【0014】
次に、請求項4に記載の発明は、前記請求項2に記載の電磁振動式搬送装置の制御装置において、前記搬送部に与える衝撃は、物理的な外力であることを特徴とする。
【0015】
次に、請求項5に記載の発明は、前記請求項1から請求項4のいずれかに記載の電磁振動式搬送装置の制御装置において、所定時間内に誘導起電力がゼロになる回数、または誘導起電力がゼロになる時間間隔を検出することによって誘導起電力の振動数が演算されることを特徴とする。
【0016】
次に、請求項6に記載の発明は、前記請求項1から請求項5のいずれかに記載の電磁振動式搬送装置の制御装置において、前記制御手段は、測定された固有振動数を補正し、補正された値に基づいて駆動周波数を設定することを特徴とする。
【0017】
そして、請求項7に記載の発明は、物品を計量する計量装置であって、電磁石が設けられた本体部と、該本体部に対して弾性部材を介して振動可能に支持されて前記電磁石の通電時に吸引される磁性体が設けられた搬送部と、前記電磁石に間欠的に通電することにより前記搬送部を印加した駆動周波数で振動させる制御手段とを有する電磁振動式搬送装置と、請求項1から請求項6のいずれかに記載の電磁振動式搬送装置の制御装置と、前記電磁振動式搬送装置によって搬送された物品を受け入れ計量する計量手段とが備えられていることを特徴とする。
【発明の効果】
【0018】
搬送部は、自由振動時には所定の固有振動数で振動し、固有振動数f0は共振周波数frに非常に近い値である。ここで、搬送部の固有振動数は数式により算出することができるが、搬送部は板バネや本体側への振動伝達を遮断するコイルスプリング等を有する多自由度系である上、非線形性の要因となる板バネの材質などを含むので、数式によってこれを算出することは困難である。そのため、一般に搬送部の固有振動数を求める際には、インパルスを入力したときの振動を各種アナライザ、例えば加速度検出器などにより検出した波形などに基づいてFFT(フーリエ変換)を行うことにより算出することになる。また、固有振動数は振幅に対して変化するので、正確に求めるためには振幅も同時に測定し補正をしなければならない。
【0019】
そこで、請求項1に記載の発明によれば、搬送部を自由振動させて、このときに電磁石のコイルに発生する誘導起電力を測定し、測定した誘導起電力の振動数を搬送部の固有振動数とし、この固有振動数に基いて駆動周波数を設定することにより、駆動周波数を迅速に所望する周波数に設定することができる。すなわち、自由振動により発生する誘導起電力の振動数は、搬送部の固有振動数と一致している。さらに、振幅の小さな状態でこれを行えば振幅による変化を小さくして固有振動数を得ることができる。このように簡単かつ迅速に搬送部の固有振動数を知ることができる。このとき、測定した誘導起電力は、精度良いFFTを行うために十分な波形を確保することができるので、これに基づいて設定した駆動周波数は精度が良い。
【0020】
次に、請求項2に記載の発明によれば、搬送部の自由振動においては、図5にあるように、振幅Aが小さいほどずれが小さく、搬送部の自由振動は、振動部に衝撃を与えることによって発生させるので、振幅の小さい状態での測定が可能となり、精度の良い固有振動数を得ることができる。
【0021】
次に、請求項3に記載の発明によれば、搬送部に与える衝撃を電気的なインパルス信号(短時間かつ高電圧の信号)により発生する電磁石の電磁力により得るので、既存の電気回路を用いてこれを行うことができ、測定手順及び装置の簡素化を図ることができる。
【0022】
次に、請求項4に記載の発明によれば、搬送部に与える衝撃を物理的な外力により発生させることによって、簡単に搬送部を自由振動させることができる。このとき、物理的な外力は、ハンマリング装置等を用いて機械的に行うものや、手動でハンマリングを行うものが挙げられる。特に、手動によりハンマリングを行う構成は、誰でも簡単にこれを行うことができると共に、装置の簡素化を図ることができる。
【0023】
次に、請求項5に記載の発明によれば、所定時間内に誘導起電力がゼロになる回数を求め、これに基いて誘導起電力の振動数を演算することができ、または誘導起電力がゼロになる時間間隔を検出することによって振動の周期を求め、この周期の逆数をとることにより誘導起電力の振動数の値が得られる。これら方法によると、誘導起電力の波形を厳密に検出するような複雑な検出回路及びFFTを用いることなく、精度よく誘導起電力の振動数を演算することができる。
【0024】
次に、請求項6に記載の発明によれば、搬送部上の物品の重量や、図4を基にして測定時の振幅に従って固有振動数の加減等の補正を行うことによって、より正確な固有振動数を求めることができる。重いものを搬送する場合はワークの重量に基づいて固有振動数を補正することも有効である。
【0025】
そして、請求項7に記載の発明によれば、前記請求項1〜6に記載の電磁振動式搬送装置と該搬送装置の制御装置とを有する計量装置は、搬送部の駆動周波数を所望の周波数に迅速に設定することができ、作業効率を向上することができる。
【0026】
そして、それぞれの搬送部は、その個体差により、図4に示す曲線をほぼ横軸方向にずらしたものとして駆動周波数に応じた振幅の特性が表される。ここで、複数の電磁振動式搬送装置及び計量手段が備えられた組合せ計量装置等の場合は、各搬送部に対して前記のように固有振動数を求めて、各固有振動数に同じ数値で加減等を行うことによって、簡単に各搬送部の振動の振幅を統一的に制御することができる。これによって、各搬送部の駆動周波数を決定するための装置構成を簡素化することができ、作業効率が向上する。
【発明を実施するための最良の形態】
【0027】
以下、本発明の実施の形態について説明する。
【0028】
図1は、電磁フィーダ1を備えた組合せ計量装置2の概略の構成を示す。この組合せ計量装置2には、機台3の中央に加振機4を介して設置され、上方の筒状の投入シュート5から投下された物品を周囲に分散する分散テーブル6と、その周囲にそれぞれ加振機7…7を介して放射状に配設され、物品を搬送する複数のトラフ8…8と、これらのトラフ8…8の先端部下方にそれぞれ位置するように円形に配設された複数のプールホッパ9…9と、それぞれのプールホッパ9…9の下方に配設された計量ホッパ10…10とが設けられている。ここで、電磁フィーダ1は、前記加振機7及びトラフ8を含む。
【0029】
そして、前記機台3の内部には、これらのプールホッパ9…9のゲート9a…9a及び計量ホッパ10…10のゲート10a…10aの開閉を制御するゲート開閉装置11…11が配設されている。このゲート開閉装置11は、モータ(図示せず)により駆動され、物品排出指令を受けたときに、図示しない駆動手段により計量ホッパ10内の物品を集合シュート12内に排出させ、空になった該計量ホッパ10内にプールホッパ9内の物品を投入させるように動作する。また、この計量ホッパ10には、図示しない重量検出器が機台3内で連設されており、計量ホッパ10内の物品の重量を計量する。
【0030】
前記電磁フィーダ1の加振機7は、図2に示すように、前記機台3に複数のコイルスプリング21…21を介して設置されるベース部材22と、該ベース部材22の上面に設置された電磁石23と、前記ベース部材22の後部側(図面左側)及び前部側(図面右側)にボルト24…24によって後傾姿勢で取り付けられた一対の板バネ25,25とを有する。これら両板バネ25,25の上部には、前記トラフ8のブラケット8aがボルト26…26で固定されている。また、該ブラケット8aにおける前記電磁石23の磁力発生面23aに対向する面には、磁性体27が取り付けられている。前記電磁石23には、後述する制御手段32を介して間欠的に通電される。
【0031】
これによれば、電磁石23に通電すると、前記磁力発生面23aと磁性体27との間に電磁力(吸引)が作用し、この結果、前後の板バネ25,25が後方にさらに後傾しながら、またこれと同時にトラフ8がやや沈み込みながら、後方に(図面左側に)変位することとなる。一方、電磁石23への通電が停止されると、前記磁力発生面23aと磁性体27との間の電磁力(吸引)が消失し、前記トラフ8が、板バネ25,25の弾性復元力により上方へやや浮き上がりながら前方に(図面右側に)変位することとなる。すなわち、前記電磁石23に間欠的に繰り返し通電すれば、間欠的に電磁力が発生し、トラフ8が前後方向に振動し、もってトラフ8上の物品は前方に搬送されることとなる。
【0032】
図3は、トラフ8の振動を制御する制御系統を示すブロック図である。すなわち、この制御系統には、前記電磁石23の電力供給源としての直流電源30と、制御パルスが印加されている期間に導通状態となって直流電源を電磁石に通電させるFET(電界効果型トランジスタ)等で構成されるスイッチング回路31と、該スイッチング回路31による通電の発生周期やパルス幅等を制御する制御手段32と、電磁石23に発生した誘導起電力E0を検出する電圧検出回路33と、誘導起電力E0がゼロになる(正負が反転する)時刻を検出するゼロクロス検出手段34と、該ゼロクロス検出手段34で検出した電圧がゼロになる時刻に基いて誘導起電力E0の振動数fEを算出すると共にこの振動数fEをトラフ8の固有振動数f0として前記制御手段32に入力する振動数算出手段35とが備えられている。
【0033】
ところで、トラフ8の振動の振幅Aは、駆動周波数f及び電磁石23へ印加する電力の大きさにより決定される。そして、図4に示すようにこの曲線の極大値Arをとる周波数が共振周波数frであり、この共振周波数frでトラフ8を振動させたときに最も大きな振幅Arが得られる。
【0034】
固有振動数f0は、トラフ8の自由振動時の振動数であり、これは共振周波数frとほぼ一致するパラメータである。
【0035】
以下、本発明に係るフィーダ7における固有振動数f0を求める手順を図6に示すフローチャート及び図7に示すタイムチャートを用いて説明する。
【0036】
まず、ステップS1で電磁石23に短時間の高電圧を印加することによってインパルス入力を行い、トラフ8を自由振動させる。図7に示すように、時刻t0でインパルス入力が行われた後、自由振動によるトラフ8の変位量の時間的変化は、正弦波の減衰曲線で表される。次に、ステップS2で、トラフ8の自由振動により電磁石23に発生する誘導起電力E0を電圧検出回路33により検出する。
【0037】
【数1】
【0038】
そして電圧検出回路33では、図7に示すような誘導起電力E0の振動曲線が得られる。この曲線は、ステップS1でインパルス入力が行われた後の、正弦波の減衰曲線として表される。なお、誘導起電力E0の振動の位相は、トラフ8の変位量の位相をコイルの特性に従ってある一定角度遅らせたものになり(図7参照)、誘導起電力E0とトラフ8の変位量は、同一周波数で振動することになる。
【0039】
次に、ステップS3において、前記ステップS2で測定した誘導起電力E0がゼロになる時刻t1…tnをゼロクロス検出手段34により検出する。
【0040】
そして、ステップS4において、誘導起電力E0の振動数fEを演算する。ここで、前記ステップS3で検出したゼロクロス時刻t1…tnのうちで振動の減衰により誘導起電力E0の振幅が測定可能範囲内になったときのゼロクロス時刻tkー1、tk+1を選択して、これに基いて誘導起電力E0の振動周期Tを演算する。そして、この周期Tの逆数をとることにより誘導起電力E0の振動数fEを算出する。そして、ステップS5で、ステップS4で演算した誘導起電力E0の振動数fEをトラフの固有振動数f0として決定する。なお、ステップS2〜S5の手順は、アナログ信号による検出、AD変換器を用いたデジタル信号による検出のいずれの手段においても実現することができる。
【0041】
そして、同様の方法で他のトラフ8…8についても固有振動数f0を求め、全てのトラフ8…8について所望の振幅Aが得られるように、駆動周波数fを調整する。すなわち、トラフ8の振幅Aは、図4に示したような特性を有しているので、任意のトラフ8において、固有振動数f0を算出した後、駆動周波数fを駆動周波数f′に調整し、所望の振幅A′が得られたときに、そのときの駆動周波数f′と固有振動数f0との差Δfを測定する。そして、他のトラフ8…8においてもそれぞれの固有振動数f0から前記と同様の差Δfになる駆動周波数fに設定する。あるいは、あるトラフで所望のA′が得られたときにΔf=f′/f0を求めておき、他のトラフでf0にΔfを乗じてf′を設定してもよい。その他の実現方法は、周知慣用技術の範囲で可能である。
【0042】
例えば、図8に示すように、例えば第1トラフにおいて前記の手順で求めた固有振動数が50Hzで、これを正の方向に2Hzずらした駆動周波数(52Hz)としたときに、所望のトラフの振幅(2mm)が得られた場合を考える。第2トラフの固有振動数は55Hzで、これを同様に正の方向に2Hzずらした駆動周波数(57Hz)としたときに、ほぼ振幅2mmの振動が得られる。これは各トラフ8…8の個体差が、駆動周波数fに対する振幅特性を示す曲線をほぼ横軸方向にずらしたものとして表されるからである。このように、全てのトラフ8…8において、それぞれの駆動周波数fをそれぞれの固有振動数から第1トラフでずらした値2Hz分増加させて設定することにより、全てのトラフ8…8の振動の振幅Aを統一的にほぼ2mmに制御することができる。
【0043】
以上のように、トラフ8を自由振動させて、このときに電磁石23のコイルに発生する誘導起電力E0を測定し、測定した誘導起電力E0の振動数fEをトラフ8の固有振動数f0とし、この固有振動数f0に基いて駆動周波数fを設定することにより、駆動周波数fを迅速に所望の周波数に設定することができる。このとき、トラフ8を振幅の小さな状態で自由振動させることにより生じる誘導起電力E0により測定される固有振動数f0は、振幅が小さければわずかな補正で済む。このように簡単かつ迅速にトラフ8の固有振動数f0を知ることができる。そして、駆動周波数fをトラフ8の固有振動数f0に基いて設定することによって、物品搬送の効率化を図ることができる。振幅の小さな自由振動では、測定した誘導起電力E0は、精度良いFFTを行うために十分な波形を確保することができるので、これに基づいて設定した駆動周波数fは精度が良い。
【0044】
一方、トラフ8の自由振動は、トラフ8に衝撃を与えることによって発生させるので、振幅Aの小さい状態での測定が可能となり、精度の良い固有振動数f0の値を得ることができる。
【0045】
また、トラフ8に与える衝撃は、電気的なインパルス信号(短期間かつ高電圧)により発生する電磁石23の電磁力により得られるので、既存の電気回路を用いてこれを行うことができ、測定手順及び装置の簡素化を図ることができる。
【0046】
なお、トラフ8に与える衝撃を物理的な外力により発生させることによって、簡単にトラフ8を自由振動させることもできる。物理的な外力は、ハンマリング装置等を用いて機械的に行うものや、手動でハンマリングを行うものが挙げられる。特に、手動によりハンマリングを行う構成は、誰でも簡単にこれを行うことができると共に、装置の簡素化を図ることができるという利点を有する。
【0047】
一方、前記のように、ゼロクロス検出手段34により誘導起電力E0のゼロクロス時刻を検出し、この時刻に基いて誘導起電力E0の周期Tを求め、この周期Tの逆数をとることによって簡単に誘導起電力E0の振動数fEを算出することができる。その結果、誘導起電力E0の波形を厳密に検出するような複雑な検出回路またはFFTを用いることなく、精度よく誘導起電力E0の振動数fEを算出することができる。なお、所定時間内に誘導起電力E0がゼロになる回数を検出し、これに基いて誘導起電力E0の振動数fEを算出することもできる。すなわち、検出したゼロクロス回数を所定時間で除算して、1秒間にゼロクロスする回数に基いて誘導起電力V0の振動数fEを算出することができる。
【0048】
また、トラフ8上の物品の重量や、図4を基にして測定時の振幅Aに従って固有振動数f0の加減等の補正を行うことによって、より正確な固有振動数f0を求めることができる。重いものを搬送する場合はワークの重量に基づいて固有振動数f0を補正することも有効である。
【0049】
さらに、本実施の形態のように、複数の電磁フィーダ1…1が備えられた組合せ計量装置2の場合は、各トラフ8に対して前記のように固有振動数f0を求めて、各固有振動数f0に同じ数値の加減等を行うことによって、簡単に各トラフ8の振幅Aを統一的に制御することができる。これによって、各トラフ8の駆動周波数fを設定するための装置構成簡素化することができ、作業効率が向上する。
【産業上の利用可能性】
【0050】
本発明は、搬送部に所望される駆動周波数を迅速に決定することができる電磁振動式搬送装置の制御装置及びその制御装置を備えた搬送装置を有する計量装置を提供する。本発明は、物品を搬送する搬送装置、より詳しくは、電磁的方法で物品の搬送部を振動させて物品を搬送する機能を有する電磁振動式搬送装置の制御装置及びその制御装置を備えた搬送装置を有する計量装置に関し、物品搬送の技術分野に広く好適である。
【図面の簡単な説明】
【0051】
【図1】本発明の実施の形態に係る組合せ計量装置の概略側面図である。
【図2】同電磁フィーダの側面図である。
【図3】同電磁フィーダの制御系統を示すブロック図である。
【図4】トラフの駆動周波数に対する振幅特性を示す図である。
【図5】振動と共振周波数・固有振動数の関係を示す図である。
【図6】固有振動数の決定手順を示すフローチャートである。
【図7】インパルス入力により発生するトラフの変位量及び誘導起電力の変化を示すタイムチャートである。
【図8】トラフの振幅制御の説明図である。
【符号の説明】
【0052】
1 電磁振動式搬送装置(電磁フィーダ)
2 組合せ計量装置
3 本体部(架台)
8 搬送部(トラフ)
23 電磁石
25 弾性部材(板バネ)
27 磁性体
32 制御手段
33 測定手段(電圧検出回路)
35 固有振動数設定手段(振動数算出手段)
【特許請求の範囲】
【請求項1】
電磁石が設けられた本体部と、該本体部に対して弾性部材を介して振動可能に支持されて前記電磁石の通電時に吸引される磁性体が設けられた搬送部と、前記電磁石に間欠的に通電することにより前記搬送部を印加した駆動周波数で振動させる制御手段とを有する電磁振動式搬送装置の制御装置であって、前記搬送部を自由振動させる手段と、搬送部の自由振動時に前記電磁石に発生する誘導起電力を測定する測定手段と、該測定手段により測定された誘導起電力の振動数を前記搬送部の固有振動数とする固有振動数設定手段とが備えられ、かつ、前記制御手段は、前記固有振動数設定手段で設定された固有振動数に基いて駆動周波数を設定することを特徴とする電磁振動式搬送装置の制御装置。
【請求項2】
前記自由振動を発生させる手段は、前記搬送部に衝撃を与えることを特徴とする請求項1に記載の電磁振動式搬送装置の制御装置。
【請求項3】
前記搬送部に与える衝撃は、電気的なインパルス信号による電磁力であることを特徴とする請求項2に記載の電磁振動式搬送装置の制御装置。
【請求項4】
前記搬送部に与える衝撃は、物理的な外力であることを特徴とする請求項2に記載の電磁振動式搬送装置の制御装置。
【請求項5】
所定時間内に誘導起電力がゼロになる回数、または誘導起電力がゼロになる時間間隔を検出することによって誘導起電力の振動数が演算されることを特徴とする請求項1から請求項4のいずれかに記載の電磁振動式搬送装置の制御装置。
【請求項6】
前記制御手段は、測定された固有振動数を補正し、補正された値に基づいて駆動周波数を設定することを特徴とする請求項1から請求項5のいずれかに記載の電磁振動式搬送装置の制御装置。
【請求項7】
物品を計量する計量装置であって、電磁石が設けられた本体部と、該本体部に対して弾性部材を介して振動可能に支持されて前記電磁石の通電時に吸引される磁性体が設けられた搬送部と、前記電磁石に間欠的に通電することにより前記搬送部を印加した駆動周波数で振動させる制御手段とを有する電磁振動式搬送装置と、請求項1から請求項6のいずれかに記載の電磁振動式搬送装置の制御装置と、前記電磁振動式搬送装置によって搬送された物品を受け入れ計量する計量手段とが備えられていることを特徴とする計量装置。
【請求項1】
電磁石が設けられた本体部と、該本体部に対して弾性部材を介して振動可能に支持されて前記電磁石の通電時に吸引される磁性体が設けられた搬送部と、前記電磁石に間欠的に通電することにより前記搬送部を印加した駆動周波数で振動させる制御手段とを有する電磁振動式搬送装置の制御装置であって、前記搬送部を自由振動させる手段と、搬送部の自由振動時に前記電磁石に発生する誘導起電力を測定する測定手段と、該測定手段により測定された誘導起電力の振動数を前記搬送部の固有振動数とする固有振動数設定手段とが備えられ、かつ、前記制御手段は、前記固有振動数設定手段で設定された固有振動数に基いて駆動周波数を設定することを特徴とする電磁振動式搬送装置の制御装置。
【請求項2】
前記自由振動を発生させる手段は、前記搬送部に衝撃を与えることを特徴とする請求項1に記載の電磁振動式搬送装置の制御装置。
【請求項3】
前記搬送部に与える衝撃は、電気的なインパルス信号による電磁力であることを特徴とする請求項2に記載の電磁振動式搬送装置の制御装置。
【請求項4】
前記搬送部に与える衝撃は、物理的な外力であることを特徴とする請求項2に記載の電磁振動式搬送装置の制御装置。
【請求項5】
所定時間内に誘導起電力がゼロになる回数、または誘導起電力がゼロになる時間間隔を検出することによって誘導起電力の振動数が演算されることを特徴とする請求項1から請求項4のいずれかに記載の電磁振動式搬送装置の制御装置。
【請求項6】
前記制御手段は、測定された固有振動数を補正し、補正された値に基づいて駆動周波数を設定することを特徴とする請求項1から請求項5のいずれかに記載の電磁振動式搬送装置の制御装置。
【請求項7】
物品を計量する計量装置であって、電磁石が設けられた本体部と、該本体部に対して弾性部材を介して振動可能に支持されて前記電磁石の通電時に吸引される磁性体が設けられた搬送部と、前記電磁石に間欠的に通電することにより前記搬送部を印加した駆動周波数で振動させる制御手段とを有する電磁振動式搬送装置と、請求項1から請求項6のいずれかに記載の電磁振動式搬送装置の制御装置と、前記電磁振動式搬送装置によって搬送された物品を受け入れ計量する計量手段とが備えられていることを特徴とする計量装置。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2006−16142(P2006−16142A)
【公開日】平成18年1月19日(2006.1.19)
【国際特許分類】
【出願番号】特願2004−195393(P2004−195393)
【出願日】平成16年7月1日(2004.7.1)
【出願人】(000147833)株式会社イシダ (859)
【Fターム(参考)】
【公開日】平成18年1月19日(2006.1.19)
【国際特許分類】
【出願日】平成16年7月1日(2004.7.1)
【出願人】(000147833)株式会社イシダ (859)
【Fターム(参考)】
[ Back to top ]