
電磁波及び/又は弾性波にさらされたオブジェクトの三次元合成再構成の方法
電磁波及び/又は弾性波にさらされたオブジェクトを、感知信号(特にノイズの多い弱信号)に基づく有用な三次元情報の識別によって、合成的に再構成する方法である。この方法は、判定基準(2)、(3)、(4)、(6)、(7)、及びグリッド(5)を、知識ベース(1)から抽出するステップ(A11)、(A12)、(A2)、(A31)、(A32)、(A4)と、判定基準(2)によってフィルタリングされた感知信号(8)から、弱信号(9)を抽出するステップ(B1)と、判定基準(3)によってフィルタリングされた弱信号(9)から、問題の弱信号(10)を抽出するステップ(B2)と、問題の弱信号(10)からノイズを除去して増幅し(B3)、有用な弱信号(11)を取得するステップと、判定基準(4)によってフィルタリングされた有用な弱信号(11)から、有用な直接情報(12)を識別し(C)、最適な判定基準(2’)及び(3’)を与えるステップと、グリッド(5)によってフィルタリングされた有用な直接情報(12)を使用して、問題の情報(13)を再構成し(D1)、最適なグリッド(5’)を与えるステップと、判定基準(6)によってフィルタリングされた問題の情報(13)を使用して、有用な情報(14)を再構成し(D2)、最適な判定基準(6’)を与えるステップと、判定基準(7)によってフィルタリングされた有用な情報(14)に基づいて、オブジェクトに関する三次元情報(15)を再構成し、認識状態ファイル(16)を与え、最適な判定基準(7’)を与えるステップと、知識ベース(1)において、判定基準(2)、(3)、(6)、(7)、及びグリッド(5)を、最適な判定基準(2’)、(3’)、(6’)、(7’)、及び最適なグリッド(5’)で更新する(E1)、(E2)、(E31)、(E32)、(E4)か、又は判定基準(2)、(3)、(6)、(7)、及びグリッド(5)を変更するステップと、を含む。この方法は、工業、医療、保安、及び防衛におけるリスク管理及びパフォーマンス管理用に問題のオブジェクトを識別する目的で設計されたものである。
【発明の詳細な説明】
【技術分野】
【0001】
本発明の分野は、電磁波及び/又は弾性波にさらされたオブジェクトの三次元合成再構成の分野である。本方法は、この曝露によってもたらされた感知信号を起点として得られる。本発明は、詳細には、非常にノイズの多い弱信号を起点としたオブジェクトの再構成に適用可能である。
【背景技術】
【0002】
限定しない例として「弱信号」とは以下のような信号である。
− S/N比が低い、
− 振幅又は強度が低い、
− 含まれる情報がばらばらになっている、及び/又は
− 含まれる情報が、偶然に発生した又は発生したマイクロイベントで構成されている。
【0003】
この方法は、産業界及び医学界、保安、並びに防衛の関係者を支援するためのものであり、パフォーマンス管理及びリスク管理のために確実な方法で識別のプロセスを制御する。
【0004】
広範囲な波長のレーザーによって照射されたオブジェクトの合成的な再構成は、保安及び防衛の分野(例えば、簡易爆発物(頭字語はIED)の識別)、民間の交通機関の分野(例えば、輸送安全の分野における歩行者又は車両の識別)、又は医療分野(例えば、組織内の癌細胞を断層撮影により識別)での広範囲な理論的及び産業的な用途を対象とする問題である。
【0005】
但し、導入された検出システムが頑強であっても、このような非常にノイズが多い環境で供給される情報には、空間分解能の損失なしにオブジェクトをローカライズ及び合成的に再構成して、確実な方法で識別することができる革新的なデータ及び知識処理方法が必要である。
【0006】
逆解析問題の分野において幾多の科学的、技術的、及び工業的研究がなされてきたが、得られた結果は、弱信号、環境、及びシステム全体の不安定性から来る測定パラメータの変動に非常に敏感であるため、要求を満たしていない状態にある。使用されているシステムと互換性を有する解決策を可能にする逆解析処理及び信頼性のある再構成の方法の開発は、依然として産業界の主要な問題である。
【0007】
限定しない例として、電磁波によって照射又は弾性波によって励起されたオブジェクトを起点とする従来の三次元再構成の方法で発生する問題は、以下に起因している。
− 伝播ノイズ
− オブジェクトに対するセンサの不安定性
− センサのノイズ及び関連する電子回路のノイズ
− 課された高い空間分解能及び時間分解能
− 合計ノイズの不明な構成
− リアルタイムでの相関の必要性
− リアルタイムでの情報の変動
− 逆解析と関連付けられた非線形の問題
− 信号の挙動の高非線形性
【発明の概要】
【発明が解決しようとする課題】
【0008】
本発明は、これらの問題点を克服することを目的とする。
【課題を解決するための手段】
【0009】
より正確には、本発明の主題は、波にさらされたオブジェクトを、この曝露によってもたらされた感知信号及び知識ベースを起点として合成的に再構成する方法である。本発明は、主に、知識ベースが、種々のフィルタリング判定基準(即ち、直接モード検索判定基準、弱信号を抽出するための判定基準、直接モードで識別するための判定基準、波の照射又は受信角度にリンクされた三次元観測グリッド、三次元観測グリッドの判定基準、三次元再構成判定基準等)と、前述判定基準と関連付けられた最適化のルールと、対応する最適な判定基準(即ち、前記最適化のルールに従った)と、を含むことを主に特徴とすると共に、更に前記方法が、
◆直接モード検索判定基準を知識ベースから抽出するステップと、
◆弱信号を抽出するための判定基準を知識ベースから抽出するステップと、
◆直接モードで識別するための判定基準及び関連するルールを知識ベースから抽出するステップと、
◆三次元観測グリッド及び関連する最適化のルールを知識ベースから抽出するステップと、
◆三次元観測グリッドの判定基準及び関連するルールを知識ベースから抽出するステップと、
◆三次元再構成判定基準及び関連するルールを知識ベースから抽出するステップと、
◆抽出された直接モード検索判定基準を通してフィルタリングされた一連の信号から、弱信号を抽出するステップと、
◆抽出された弱信号の抽出用の判定基準を通してフィルタリングされた弱信号から、問題の弱信号を抽出するステップと、
◆有用な弱信号を取得するように、問題の弱信号からノイズを除去するステップと、を含み、
◆有用な弱信号が、知識ベースからもたらされる、直接モードで識別するための判定基準の最適化のルールに適合している場合、
i. これらの抽出された、直接モードで抽出するための判定基準が、直接モードで抽出するための最適な判定基準となり、
ii. 直接モードで抽出するための前記最適な判定基準で、知識ベースを更新し、
iii.抽出された直接モード検索判定基準が、最適な直接モード検索判定基準となり、
iv. 前記最適な直接モード検索判定基準で、知識ベースを更新し、
v. 直接モードで識別するための判定基準を通してフィルタリングされた有用な弱信号に基づいて、有用な直接情報を識別し、
或いは、知識ベースにおいて直接モードで抽出するためのこのような判定基準を変更し、これらの判定基準を抽出するステップ、問題の弱信号を抽出するステップ、有用な弱信号を抽出するステップ、有用な直接情報を識別するステップ、及び弱信号を抽出するための新しい判定基準の最適化のルールに関係するステップを繰り返すものとし、
有用な弱信号が、直接モードで識別するための判定基準の最適化のルールに適合していない場合は、知識ベース内のこれらの直接モード検索判定基準を変更し、これらの判定基準を抽出するステップ、弱信号を抽出するステップ、問題の弱信号を抽出するステップ、有用な弱信号を抽出するステップ、有用な直接情報を識別するステップ、及び新しい抽出判定基準の最適化のルールに関するステップを繰り返し、
◆有用な直接情報が、三次元観測グリッドの最適化のルールに適合している場合、
i. これらの抽出された三次元観測グリッドが、最適な三次元観測グリッドとなり、
ii. 知識ベース及び三次元観測グリッドをこれらの最適な三次元観測グリッドで更新し、
iii.抽出された三次元観測グリッドを介してフィルタリングされた有用な直接情報に基づいて、問題の三次元情報を再構成し、
或いは、知識ベース内のこのような三次元観測グリッドを変更し、グリッドを抽出するステップ、及びこれらの新しいグリッドの最適化のルールに関係するステップを繰り返し、
◆問題の三次元情報が、三次元観測グリッドの判定基準の最適化のルールに適合している場合、
i. これらの抽出された、三次元観測グリッドの判定基準が、三次元観測グリッドの最適な判定基準となり、
ii. 知識ベースにおいて、三次元観測グリッドの判定基準をこれらの、三次元観測グリッドの最適な判定基準で更新し、
iii.抽出された三次元グリッドの判定基準を介してフィルタリングされた問題の三次元情報に基づいて、有用な三次元情報を再構成し、
或いは、知識ベース内のこのような三次元観測グリッドの判定基準を変更し、グリッド判定基準を抽出するステップと、これらの新しい判定基準の最適化のルールに関係するステップを繰り返し、
◆有用な三次元情報が、三次元再構成判定基準の最適化のルールに適合している場合、
i. このような抽出された三次元再構成判定基準が最適な三次元再構成判定基準となり、
ii. 知識ベース内において、三次元再構成判定基準をこれらの最適な三次元再構成判定基準で更新し、
iii.抽出された三次元再構成判定基準を介してフィルタリングされた有用な三次元情報に基づいて、オブジェクトに関する三次元情報を再構成し、認識状態ファイルを決定し、
或いは、知識ベース内のこのような三次元再構成判定基準を変更し、再構成用の判定基準を抽出するステップと、これらの新しい再構成判定基準の最適化のルールに関係するステップを繰り返すことを特徴とする。
【0010】
好ましくは、本方法はまた、ノイズがない信号を増幅するステップも含む。
【0011】
非制限的な例によって以下に示す詳細な説明を、添付の図面を参照しながら読めば、本発明の他の特徴や利点も明らかになるであろう。
【図面の簡単な説明】
【0012】
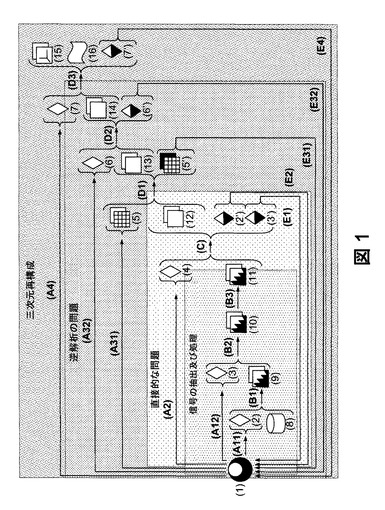
【図1】本発明に係る方法を概略的に示す。
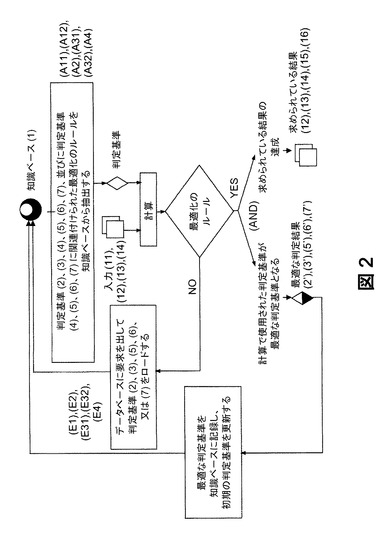
【図2】判定基準の最適化に関する流れ図である。
【0013】
図ごとに、同じ要素は同じ参照番号で識別される。
【発明を実施するための形態】
【0014】
本発明に係る方法は、可視部分から赤外線に及ぶレンジの波長を有するレーザーで生成された電磁波及び/又はサブミリメートルからメートルのレンジに及ぶマイクロ波によって生成された電磁波等、電磁波にさらされたオブジェクトの三次元合成再構成に適用可能である。オブジェクトはまた、超低周波、音波、又は超音波のレンジ内にある波等、弾性波にさらされる場合もある。
【0015】
本方法は、物理的な測定から得られるデータ、物理的なモデルの結果から得られるデータ、該当する分野の知識からもたらされるデータ、及び/又は該当する分野の専門家の経験知識からもたらされるデータを含む参照知識及びデータベース(以降、知識ベース(1)と称する)に依存する。より詳細には、知識ベースは以下を含む。
− 直接モード検索判定基準(2)
− 弱信号の抽出の判定基準(3)
− 直接モードでの識別の判定基準(4)
− 三次元観察グリッド(5)
− 三次元観察グリッドの判定基準(6)
− 三次元再構成の判定基準(7)
− 上記判定基準(4)、(5)、(6)、(7)に関連付けられた最適化のルール
− また、対応する最適な判定基準及びグリッド(2’)、(3’)、(5’)、(6’)、(7’)
【0016】
これらの判定基準は、信号又は情報をフィルタにかけるためのものである。
【0017】
限定しない例として、直接モードで検索するための判定基準(2)は、振幅の相関性から、散乱強度相関から、時間系列から、確率密度から、スペクトルシグネチャから、及び/又は時間相関からもたらされる判定基準である。直接モードでの検索は、図1を参照して以下に示すように、オブジェクトが波にさらされることで生成された感知信号から有用なエネルギー情報を抽出して弱信号を取得することである。これは、通常、弱信号のフィルタリングである。直接モード検索判定基準は、感知信号を抽出するための判定基準であり、言い換えると、弱信号を選択するための、感知信号のフィルタリング判定基準である。
【0018】
限定しない例として、弱信号を抽出するための判定基準(3)は、閾値から、レンジから、及び/又は直接モード検索判定基準用の評価ドメインからもたらされる判定基準である。
【0019】
限定しない例として、直接モードで識別するための判定基準(4)は、オブジェクトが属する事前に定義された1つ又は複数のクラスからもたらされる判定基準である。
【0020】
限定しない例として、三次元観測グリッド(5)は、照射レーザービームの角度へ、受信レーザービームの角度又は励起超音波ビームの角度へ、及び/又は超音波受信角度へリンクされたグリッド(「読み取りグリッドの意味の」)である。したがって、これらは波のビームの照射角度又は受信角度にリンクされたグリッドである。
【0021】
限定しない例として、三次元観測グリッドの判定基準(6)は、照射レーザー角度の値、受信レーザー角度の値、照射レーザー角度のピッチの値、受信レーザー角度のピッチの値又は超音波励起角度の値、超音波受信角度の値、超音波励起角度のピッチの値、及び/又は超音波受信角度のピッチの値である。したがって、これらの判定基準は、波のビームの照射角度又は受信角度にリンクされた値である。
【0022】
限定しない例として、三次元再構成判定基準(7)は、形状のパラメータ、ファセットのトポロジのパラメータ、ファセット数のパラメータ、オブジェクトのファセットサイズのパラメータ、及び/又は知識ベース(1)によって供給されるオブジェクトの挙動のパラメータである。したがって、これらは、オブジェクトの形状又は表現にリンクされた判定基準である。
【0023】
限定しない例として、最適化のルールは、パラメータ、閾値比較、合致の数、時間ウィンドウ、スペクトルシグニチャ、時間・周波数スポット等の最大値に関するタイプ検索のものである。
【0024】
最適な判定基準の例を以下に示す。
【0025】
図1に示すように、本発明に係るオブジェクトの三次元再構成は、知識ベースが更新される4つの主要ステップの最後で、知識ベース(1)を使用して取得される。
【0026】
これらのステップとは、以下の通りである。
− 感知信号(特に非常にノイズの多い感知信号)から有用な信号を抽出するステップ
− 有用な信号に基づいて有用な直接情報を直接モードで識別するステップ
− 有用な直接情報の逆解析処理によって問題の有用な三次元情報を再構成するステップ
− オブジェクトに関する有用な三次元情報に基づいてオブジェクトを三次元再構成するステップ。
【0027】
このような主なステップについてこれから詳しく説明する。
【0028】
まずは、非常にノイズが多いと考えられる感知信号の一部(8)(1組として参照する)を使用して有用な弱信号(11)を抽出するステップ(B1、B2、B3)について検討する。このステップは、中間結果として、弱信号(9)及び問題の弱信号(10)を取得することに基づいている。
【0029】
このステップは、以下から構成される複数のサブステップを含む。
− 知識ベース(1)から、直接モード検索判定基準(2)を抽出すること(A11)
− 直接モード検索判定基準(2)を通してフィルタリングされた一連の感知信号(8)から、弱信号(9)として参照される信号を抽出すること(B1)
− 弱信号の抽出用の判定基準(3)を知識ベース(1)から抽出すること(A12)
− 弱信号を抽出するための判定基準(3)を通してフィルタリングされた弱信号(9)から、問題の弱信号(10)として参照される信号を抽出すること(B2)
− 有用な弱信号(11)として参照される信号を取得するために、問題の弱信号(10)からノイズを除去し、好ましくは増幅すること(B3)。
【0030】
以下に示す3つの主要なステップは、図2に示す流れ図の形式で示したのと実質的に同じシナリオに従って行われる。
【0031】
ステップに対する特定の判定基準と、それに関連する最適化のためのルールは、知識ベース(1)から抽出される。最適な特定の判定基準もまた、場合によっては図示のように決定される。これらの最適な判定基準は、特定の判定基準を起点として、それぞれに関連する最適なルールを組み込むことにより、取得される。
【0032】
入力データに適用される特定の判定基準の最適化のルールが満たされると、以下のようになる。
− ステップに対する入力データが上記特定の判定基準によってフィルタリングされ、これらが出力データとなる。
− このような特定の判定基準は、最適な特定の判定基準となる。
− 知識ベース(1)は、このような最適な判定基準で更新される(これは使用される特定の判定基準の妥当性を検証することに相当する)。
或いは、知識ベース(1)内でこのような特定の判定基準を変更し、判定基準の抽出及び関連する最適化のルールの抽出を繰り返し、このような新しい特定の判定基準でフィルタリングを行う。
【0033】
次に、前述抽出ステップの終わりで取得される有用な弱信号(11)に基づいて有用な直接情報(12)を直接モードで識別するステップ(C)について検討する。有用な直接情報(12)は、通常、有用な弱信号(11)からもたらされる後方散乱及び/又は散乱エネルギータイプのデータのサブセットを含む。
【0034】
このステップは、以下から構成されるサブステップを含む。
− 知識ベース(1)から、直接モードで識別を行うための判定基準(4)とそれに関連するルールを抽出すること(A2)。
有用な弱信号(11)が、直接モードで識別するための判定基準(4)の最適化のルールに適合している場合、
・ 抽出された、直接モードで抽出するための判定基準(3)が、直接モードでの最適な抽出判定基準(3’)となる。
・ 直接モードでの最適な抽出判定基準(3’)によって、知識ベース(1)を更新する(E1)。
・ 抽出された直接モードで検索するための判定基準(2)が、最適な直接モードで検索するための判定基準(2’)となる。
・ 前記最適な直接モード検索判定基準(2’)によって知識ベース(1)を更新する(E2)。
・ 直接モードで識別するための判定基準(4)を通してフィルタリングされた有用な弱信号(11)に基づいて、有用な直接情報(12)を識別する(C)。
或いは、このような、弱信号を抽出するための抽出判定基準(3)を変更し、これらの判定基準(3)を抽出するステップ(A12)、前記ステップ(B2)、(B3)、及び(C)、並びに前記判定基準(4)の前記最適化のルールに関係する前記ステップを繰り返す。
有用な弱信号(11)が、直接モードで識別するための判定基準(4)の最適化のルールに適合していない場合は、知識ベース(1)内のこれらの直接モード検索判定基準(2)を変更し、これらの判定基準(2)の抽出ステップ(A11)、ステップ(B1)、(B2)、(B3)、及び(C)、並びに判定基準(2)の最適化のルールに関するステップを繰り返す。
【0035】
限定しない例として、最適な直接モード検索判定基準(2’)は、識別(C)が実行される、振幅相関、散乱強度相関、時間系列、確率密度、スペクトルシグネチャ、及び/又は時間相関での最適な判定基準である。
【0036】
限定しない例として、弱信号の最適な抽出判定基準(3’)は、閾値から、レンジからもたらされる及び/又は直接モード検索判定基準の評価のドメインからもたらされる最適な判定基準であり、これらに対して識別(C)が実行される。
【0037】
次に、有用な直接情報(12)の逆解析処理によって、問題の有用な三次元情報(14)を再構成するステップ(D1、D2)を検討する。これは中間結果として問題の三次元情報(13)の取得に基づくものである。問題の三次元情報(13)は、有用な直接情報に基づく三次元再構成を形成する。有用な三次元情報(14)は、不自然な結果を排除することによって改良された三次元再構成を表す。
【0038】
このステップは以下から構成されるサブステップを含む。
− 三次元観測グリッド(5)及び関連する最適化のルールを、知識ベース(1)から抽出すること(A31)。
− 有用な直接情報(12)が、知識ベース(1)からもたらされる、三次元観測グリッド(5)の最適化のためのルールに適合する場合、
・ これらの三次元観測グリッド(5)が最適な三次元観測グリッド(5’)となる。
・ 最適な三次元観測グリッド(5’)で、知識ベース(1)を更新する(E31)。
・ 三次元観測グリッド(5)を介してフィルタリングされた有用な直接情報(12)を使用して、問題の三次元情報(13)を再構成する(D1)。
或いは、知識ベース(1)内のこのような三次元観測グリッド(5)を変更し、グリッドを抽出するステップ(A31)と、これらの新しいグリッド(5)の最適化のルールに関係するステップを繰り返す。
− 三次元観測グリッドの判定基準(6)と関連する最適化のルールを知識ベース(1)から抽出する(A32)。
− 問題の三次元情報(13)が、知識ベース(1)からもたらされる、三次元観測グリッドの判定基準(6)の最適化のルールに適合する場合、
・ これらの三次元観測グリッドの判定基準(6)が、三次元観測グリッドの最適な判定基準(6’)となる。
・ 知識ベース(1)を、三次元観測グリッドの最適な判定基準(6’)で更新する(E32)。
・ 三次元グリッドの判定基準(6)を介してフィルタリングされた問題の三次元情報(13)を使用して、有用な三次元情報(14)を再構成する(D2)。
或いは、知識ベース(1)内のこのような三次元観測グリッドの判定基準(6)を変更し、グリッド判定基準を抽出するステップ(A32)と、これらの新しい判定基準(6)の最適化のためのルールに関係するステップを繰り返す。
【0039】
限定しない例として、最適な三次元観測グリッド(5’)とは、再構成(D1)が実行される、照射レーザービームの角度へ、受信レーザービームの角度又は励起超音波ビームの角度へ、及び/又は超音波受信角度へリンクされた最適なグリッドである。
【0040】
限定しない例として、三次元観測グリッドの最適な判定基準(6’)とは、再構成(D2)が実行される、照射レーザー角度の最適値、受信レーザー角度の最適値、照射レーザー角度のピッチの最適値、受信レーザー角度のピッチの最適値又は超音波励起角度の最適値、超音波受信角度の最適値、超音波励起角度のピッチの最適値、及び/又は超音波受信角度のピッチの最適値となる。
【0041】
次に、オブジェクトの有用な三次元情報(14)から開始される、オブジェクトの三次元情報(15)の再構成の最後のステップ(D3)について説明する。オブジェクトに関する有用な三次元情報(15)は、オブジェクトの最適な三次元再構成に対応する。認識状態ファイル(16)は、例えば、「オブジェクトが再構成されていない」、「知識ベースの拡張が必要」、「操作が遅延されている」、又は「ハードウェアが利用不可能」といったタイプの情報を与える。最後に、これは再構成方法に関するレポート要約ファイルである。
【0042】
このステップは、以下から構成されるサブステップを含む。
− 三次元再構成判定基準(7)及び関連する最適化のルールを知識ベース(1)からを抽出すること(A4)。
− オブジェクトに関する有用な三次元情報(14)が、知識ベース(1)からもたらされる三次元再構成判定基準(7)の最適化のルールに適合している場合、
・ このような三次元再構成判定基準(7)は、最適な三次元再構成判定基準(7’)となる。
・ 知識ベース(1)を最適な三次元再構成判定基準(7’)で更新する(E4)。
・ 三次元再構成判定基準(7)を介してフィルタリングされた有用な三次元情報(14)に基づいて、オブジェクトに関する三次元情報(15)を再構成し(D3)、認識状態ファイル(16)を提供する。
或いは、知識ベース(1)内のこのような三次元再構成判定基準(7)を変更し、再構成の判定基準を抽出するためのステップ(A4)と、これらの新しい判定基準(7)の最適化のためのルールに関係するステップを繰り返す。
【0043】
限定しない例として、最適な三次元再構成判定基準(7’)は、三次元再構成(D3)が実行される、ファセット数の最適値又は各ファセットのサイズの最適値となる。
【0044】
ステップ(A11)、(A12)、(A2)、(A31)、(A32)、(A4)、(B1)、(B2)、(B3)、(C)、(D1)、(D2)、及び(D3)は、情報、知識、データ、信号、及び人工知能手法を処理するための手法であり、各機能は、このような手法を特に複合化することにより達成される。
【0045】
本発明に係る方法は特に、リスク管理を目的として問題のオブジェクトを識別するプロセスを制御することや、自然災害、競争、環境、工業、医療及びバイオテクノロジー、原子力、石油、保安、輸送(空、道路、鉄道、海)等の分野でのパフォーマンスを制御することを意図する。
【技術分野】
【0001】
本発明の分野は、電磁波及び/又は弾性波にさらされたオブジェクトの三次元合成再構成の分野である。本方法は、この曝露によってもたらされた感知信号を起点として得られる。本発明は、詳細には、非常にノイズの多い弱信号を起点としたオブジェクトの再構成に適用可能である。
【背景技術】
【0002】
限定しない例として「弱信号」とは以下のような信号である。
− S/N比が低い、
− 振幅又は強度が低い、
− 含まれる情報がばらばらになっている、及び/又は
− 含まれる情報が、偶然に発生した又は発生したマイクロイベントで構成されている。
【0003】
この方法は、産業界及び医学界、保安、並びに防衛の関係者を支援するためのものであり、パフォーマンス管理及びリスク管理のために確実な方法で識別のプロセスを制御する。
【0004】
広範囲な波長のレーザーによって照射されたオブジェクトの合成的な再構成は、保安及び防衛の分野(例えば、簡易爆発物(頭字語はIED)の識別)、民間の交通機関の分野(例えば、輸送安全の分野における歩行者又は車両の識別)、又は医療分野(例えば、組織内の癌細胞を断層撮影により識別)での広範囲な理論的及び産業的な用途を対象とする問題である。
【0005】
但し、導入された検出システムが頑強であっても、このような非常にノイズが多い環境で供給される情報には、空間分解能の損失なしにオブジェクトをローカライズ及び合成的に再構成して、確実な方法で識別することができる革新的なデータ及び知識処理方法が必要である。
【0006】
逆解析問題の分野において幾多の科学的、技術的、及び工業的研究がなされてきたが、得られた結果は、弱信号、環境、及びシステム全体の不安定性から来る測定パラメータの変動に非常に敏感であるため、要求を満たしていない状態にある。使用されているシステムと互換性を有する解決策を可能にする逆解析処理及び信頼性のある再構成の方法の開発は、依然として産業界の主要な問題である。
【0007】
限定しない例として、電磁波によって照射又は弾性波によって励起されたオブジェクトを起点とする従来の三次元再構成の方法で発生する問題は、以下に起因している。
− 伝播ノイズ
− オブジェクトに対するセンサの不安定性
− センサのノイズ及び関連する電子回路のノイズ
− 課された高い空間分解能及び時間分解能
− 合計ノイズの不明な構成
− リアルタイムでの相関の必要性
− リアルタイムでの情報の変動
− 逆解析と関連付けられた非線形の問題
− 信号の挙動の高非線形性
【発明の概要】
【発明が解決しようとする課題】
【0008】
本発明は、これらの問題点を克服することを目的とする。
【課題を解決するための手段】
【0009】
より正確には、本発明の主題は、波にさらされたオブジェクトを、この曝露によってもたらされた感知信号及び知識ベースを起点として合成的に再構成する方法である。本発明は、主に、知識ベースが、種々のフィルタリング判定基準(即ち、直接モード検索判定基準、弱信号を抽出するための判定基準、直接モードで識別するための判定基準、波の照射又は受信角度にリンクされた三次元観測グリッド、三次元観測グリッドの判定基準、三次元再構成判定基準等)と、前述判定基準と関連付けられた最適化のルールと、対応する最適な判定基準(即ち、前記最適化のルールに従った)と、を含むことを主に特徴とすると共に、更に前記方法が、
◆直接モード検索判定基準を知識ベースから抽出するステップと、
◆弱信号を抽出するための判定基準を知識ベースから抽出するステップと、
◆直接モードで識別するための判定基準及び関連するルールを知識ベースから抽出するステップと、
◆三次元観測グリッド及び関連する最適化のルールを知識ベースから抽出するステップと、
◆三次元観測グリッドの判定基準及び関連するルールを知識ベースから抽出するステップと、
◆三次元再構成判定基準及び関連するルールを知識ベースから抽出するステップと、
◆抽出された直接モード検索判定基準を通してフィルタリングされた一連の信号から、弱信号を抽出するステップと、
◆抽出された弱信号の抽出用の判定基準を通してフィルタリングされた弱信号から、問題の弱信号を抽出するステップと、
◆有用な弱信号を取得するように、問題の弱信号からノイズを除去するステップと、を含み、
◆有用な弱信号が、知識ベースからもたらされる、直接モードで識別するための判定基準の最適化のルールに適合している場合、
i. これらの抽出された、直接モードで抽出するための判定基準が、直接モードで抽出するための最適な判定基準となり、
ii. 直接モードで抽出するための前記最適な判定基準で、知識ベースを更新し、
iii.抽出された直接モード検索判定基準が、最適な直接モード検索判定基準となり、
iv. 前記最適な直接モード検索判定基準で、知識ベースを更新し、
v. 直接モードで識別するための判定基準を通してフィルタリングされた有用な弱信号に基づいて、有用な直接情報を識別し、
或いは、知識ベースにおいて直接モードで抽出するためのこのような判定基準を変更し、これらの判定基準を抽出するステップ、問題の弱信号を抽出するステップ、有用な弱信号を抽出するステップ、有用な直接情報を識別するステップ、及び弱信号を抽出するための新しい判定基準の最適化のルールに関係するステップを繰り返すものとし、
有用な弱信号が、直接モードで識別するための判定基準の最適化のルールに適合していない場合は、知識ベース内のこれらの直接モード検索判定基準を変更し、これらの判定基準を抽出するステップ、弱信号を抽出するステップ、問題の弱信号を抽出するステップ、有用な弱信号を抽出するステップ、有用な直接情報を識別するステップ、及び新しい抽出判定基準の最適化のルールに関するステップを繰り返し、
◆有用な直接情報が、三次元観測グリッドの最適化のルールに適合している場合、
i. これらの抽出された三次元観測グリッドが、最適な三次元観測グリッドとなり、
ii. 知識ベース及び三次元観測グリッドをこれらの最適な三次元観測グリッドで更新し、
iii.抽出された三次元観測グリッドを介してフィルタリングされた有用な直接情報に基づいて、問題の三次元情報を再構成し、
或いは、知識ベース内のこのような三次元観測グリッドを変更し、グリッドを抽出するステップ、及びこれらの新しいグリッドの最適化のルールに関係するステップを繰り返し、
◆問題の三次元情報が、三次元観測グリッドの判定基準の最適化のルールに適合している場合、
i. これらの抽出された、三次元観測グリッドの判定基準が、三次元観測グリッドの最適な判定基準となり、
ii. 知識ベースにおいて、三次元観測グリッドの判定基準をこれらの、三次元観測グリッドの最適な判定基準で更新し、
iii.抽出された三次元グリッドの判定基準を介してフィルタリングされた問題の三次元情報に基づいて、有用な三次元情報を再構成し、
或いは、知識ベース内のこのような三次元観測グリッドの判定基準を変更し、グリッド判定基準を抽出するステップと、これらの新しい判定基準の最適化のルールに関係するステップを繰り返し、
◆有用な三次元情報が、三次元再構成判定基準の最適化のルールに適合している場合、
i. このような抽出された三次元再構成判定基準が最適な三次元再構成判定基準となり、
ii. 知識ベース内において、三次元再構成判定基準をこれらの最適な三次元再構成判定基準で更新し、
iii.抽出された三次元再構成判定基準を介してフィルタリングされた有用な三次元情報に基づいて、オブジェクトに関する三次元情報を再構成し、認識状態ファイルを決定し、
或いは、知識ベース内のこのような三次元再構成判定基準を変更し、再構成用の判定基準を抽出するステップと、これらの新しい再構成判定基準の最適化のルールに関係するステップを繰り返すことを特徴とする。
【0010】
好ましくは、本方法はまた、ノイズがない信号を増幅するステップも含む。
【0011】
非制限的な例によって以下に示す詳細な説明を、添付の図面を参照しながら読めば、本発明の他の特徴や利点も明らかになるであろう。
【図面の簡単な説明】
【0012】
【図1】本発明に係る方法を概略的に示す。
【図2】判定基準の最適化に関する流れ図である。
【0013】
図ごとに、同じ要素は同じ参照番号で識別される。
【発明を実施するための形態】
【0014】
本発明に係る方法は、可視部分から赤外線に及ぶレンジの波長を有するレーザーで生成された電磁波及び/又はサブミリメートルからメートルのレンジに及ぶマイクロ波によって生成された電磁波等、電磁波にさらされたオブジェクトの三次元合成再構成に適用可能である。オブジェクトはまた、超低周波、音波、又は超音波のレンジ内にある波等、弾性波にさらされる場合もある。
【0015】
本方法は、物理的な測定から得られるデータ、物理的なモデルの結果から得られるデータ、該当する分野の知識からもたらされるデータ、及び/又は該当する分野の専門家の経験知識からもたらされるデータを含む参照知識及びデータベース(以降、知識ベース(1)と称する)に依存する。より詳細には、知識ベースは以下を含む。
− 直接モード検索判定基準(2)
− 弱信号の抽出の判定基準(3)
− 直接モードでの識別の判定基準(4)
− 三次元観察グリッド(5)
− 三次元観察グリッドの判定基準(6)
− 三次元再構成の判定基準(7)
− 上記判定基準(4)、(5)、(6)、(7)に関連付けられた最適化のルール
− また、対応する最適な判定基準及びグリッド(2’)、(3’)、(5’)、(6’)、(7’)
【0016】
これらの判定基準は、信号又は情報をフィルタにかけるためのものである。
【0017】
限定しない例として、直接モードで検索するための判定基準(2)は、振幅の相関性から、散乱強度相関から、時間系列から、確率密度から、スペクトルシグネチャから、及び/又は時間相関からもたらされる判定基準である。直接モードでの検索は、図1を参照して以下に示すように、オブジェクトが波にさらされることで生成された感知信号から有用なエネルギー情報を抽出して弱信号を取得することである。これは、通常、弱信号のフィルタリングである。直接モード検索判定基準は、感知信号を抽出するための判定基準であり、言い換えると、弱信号を選択するための、感知信号のフィルタリング判定基準である。
【0018】
限定しない例として、弱信号を抽出するための判定基準(3)は、閾値から、レンジから、及び/又は直接モード検索判定基準用の評価ドメインからもたらされる判定基準である。
【0019】
限定しない例として、直接モードで識別するための判定基準(4)は、オブジェクトが属する事前に定義された1つ又は複数のクラスからもたらされる判定基準である。
【0020】
限定しない例として、三次元観測グリッド(5)は、照射レーザービームの角度へ、受信レーザービームの角度又は励起超音波ビームの角度へ、及び/又は超音波受信角度へリンクされたグリッド(「読み取りグリッドの意味の」)である。したがって、これらは波のビームの照射角度又は受信角度にリンクされたグリッドである。
【0021】
限定しない例として、三次元観測グリッドの判定基準(6)は、照射レーザー角度の値、受信レーザー角度の値、照射レーザー角度のピッチの値、受信レーザー角度のピッチの値又は超音波励起角度の値、超音波受信角度の値、超音波励起角度のピッチの値、及び/又は超音波受信角度のピッチの値である。したがって、これらの判定基準は、波のビームの照射角度又は受信角度にリンクされた値である。
【0022】
限定しない例として、三次元再構成判定基準(7)は、形状のパラメータ、ファセットのトポロジのパラメータ、ファセット数のパラメータ、オブジェクトのファセットサイズのパラメータ、及び/又は知識ベース(1)によって供給されるオブジェクトの挙動のパラメータである。したがって、これらは、オブジェクトの形状又は表現にリンクされた判定基準である。
【0023】
限定しない例として、最適化のルールは、パラメータ、閾値比較、合致の数、時間ウィンドウ、スペクトルシグニチャ、時間・周波数スポット等の最大値に関するタイプ検索のものである。
【0024】
最適な判定基準の例を以下に示す。
【0025】
図1に示すように、本発明に係るオブジェクトの三次元再構成は、知識ベースが更新される4つの主要ステップの最後で、知識ベース(1)を使用して取得される。
【0026】
これらのステップとは、以下の通りである。
− 感知信号(特に非常にノイズの多い感知信号)から有用な信号を抽出するステップ
− 有用な信号に基づいて有用な直接情報を直接モードで識別するステップ
− 有用な直接情報の逆解析処理によって問題の有用な三次元情報を再構成するステップ
− オブジェクトに関する有用な三次元情報に基づいてオブジェクトを三次元再構成するステップ。
【0027】
このような主なステップについてこれから詳しく説明する。
【0028】
まずは、非常にノイズが多いと考えられる感知信号の一部(8)(1組として参照する)を使用して有用な弱信号(11)を抽出するステップ(B1、B2、B3)について検討する。このステップは、中間結果として、弱信号(9)及び問題の弱信号(10)を取得することに基づいている。
【0029】
このステップは、以下から構成される複数のサブステップを含む。
− 知識ベース(1)から、直接モード検索判定基準(2)を抽出すること(A11)
− 直接モード検索判定基準(2)を通してフィルタリングされた一連の感知信号(8)から、弱信号(9)として参照される信号を抽出すること(B1)
− 弱信号の抽出用の判定基準(3)を知識ベース(1)から抽出すること(A12)
− 弱信号を抽出するための判定基準(3)を通してフィルタリングされた弱信号(9)から、問題の弱信号(10)として参照される信号を抽出すること(B2)
− 有用な弱信号(11)として参照される信号を取得するために、問題の弱信号(10)からノイズを除去し、好ましくは増幅すること(B3)。
【0030】
以下に示す3つの主要なステップは、図2に示す流れ図の形式で示したのと実質的に同じシナリオに従って行われる。
【0031】
ステップに対する特定の判定基準と、それに関連する最適化のためのルールは、知識ベース(1)から抽出される。最適な特定の判定基準もまた、場合によっては図示のように決定される。これらの最適な判定基準は、特定の判定基準を起点として、それぞれに関連する最適なルールを組み込むことにより、取得される。
【0032】
入力データに適用される特定の判定基準の最適化のルールが満たされると、以下のようになる。
− ステップに対する入力データが上記特定の判定基準によってフィルタリングされ、これらが出力データとなる。
− このような特定の判定基準は、最適な特定の判定基準となる。
− 知識ベース(1)は、このような最適な判定基準で更新される(これは使用される特定の判定基準の妥当性を検証することに相当する)。
或いは、知識ベース(1)内でこのような特定の判定基準を変更し、判定基準の抽出及び関連する最適化のルールの抽出を繰り返し、このような新しい特定の判定基準でフィルタリングを行う。
【0033】
次に、前述抽出ステップの終わりで取得される有用な弱信号(11)に基づいて有用な直接情報(12)を直接モードで識別するステップ(C)について検討する。有用な直接情報(12)は、通常、有用な弱信号(11)からもたらされる後方散乱及び/又は散乱エネルギータイプのデータのサブセットを含む。
【0034】
このステップは、以下から構成されるサブステップを含む。
− 知識ベース(1)から、直接モードで識別を行うための判定基準(4)とそれに関連するルールを抽出すること(A2)。
有用な弱信号(11)が、直接モードで識別するための判定基準(4)の最適化のルールに適合している場合、
・ 抽出された、直接モードで抽出するための判定基準(3)が、直接モードでの最適な抽出判定基準(3’)となる。
・ 直接モードでの最適な抽出判定基準(3’)によって、知識ベース(1)を更新する(E1)。
・ 抽出された直接モードで検索するための判定基準(2)が、最適な直接モードで検索するための判定基準(2’)となる。
・ 前記最適な直接モード検索判定基準(2’)によって知識ベース(1)を更新する(E2)。
・ 直接モードで識別するための判定基準(4)を通してフィルタリングされた有用な弱信号(11)に基づいて、有用な直接情報(12)を識別する(C)。
或いは、このような、弱信号を抽出するための抽出判定基準(3)を変更し、これらの判定基準(3)を抽出するステップ(A12)、前記ステップ(B2)、(B3)、及び(C)、並びに前記判定基準(4)の前記最適化のルールに関係する前記ステップを繰り返す。
有用な弱信号(11)が、直接モードで識別するための判定基準(4)の最適化のルールに適合していない場合は、知識ベース(1)内のこれらの直接モード検索判定基準(2)を変更し、これらの判定基準(2)の抽出ステップ(A11)、ステップ(B1)、(B2)、(B3)、及び(C)、並びに判定基準(2)の最適化のルールに関するステップを繰り返す。
【0035】
限定しない例として、最適な直接モード検索判定基準(2’)は、識別(C)が実行される、振幅相関、散乱強度相関、時間系列、確率密度、スペクトルシグネチャ、及び/又は時間相関での最適な判定基準である。
【0036】
限定しない例として、弱信号の最適な抽出判定基準(3’)は、閾値から、レンジからもたらされる及び/又は直接モード検索判定基準の評価のドメインからもたらされる最適な判定基準であり、これらに対して識別(C)が実行される。
【0037】
次に、有用な直接情報(12)の逆解析処理によって、問題の有用な三次元情報(14)を再構成するステップ(D1、D2)を検討する。これは中間結果として問題の三次元情報(13)の取得に基づくものである。問題の三次元情報(13)は、有用な直接情報に基づく三次元再構成を形成する。有用な三次元情報(14)は、不自然な結果を排除することによって改良された三次元再構成を表す。
【0038】
このステップは以下から構成されるサブステップを含む。
− 三次元観測グリッド(5)及び関連する最適化のルールを、知識ベース(1)から抽出すること(A31)。
− 有用な直接情報(12)が、知識ベース(1)からもたらされる、三次元観測グリッド(5)の最適化のためのルールに適合する場合、
・ これらの三次元観測グリッド(5)が最適な三次元観測グリッド(5’)となる。
・ 最適な三次元観測グリッド(5’)で、知識ベース(1)を更新する(E31)。
・ 三次元観測グリッド(5)を介してフィルタリングされた有用な直接情報(12)を使用して、問題の三次元情報(13)を再構成する(D1)。
或いは、知識ベース(1)内のこのような三次元観測グリッド(5)を変更し、グリッドを抽出するステップ(A31)と、これらの新しいグリッド(5)の最適化のルールに関係するステップを繰り返す。
− 三次元観測グリッドの判定基準(6)と関連する最適化のルールを知識ベース(1)から抽出する(A32)。
− 問題の三次元情報(13)が、知識ベース(1)からもたらされる、三次元観測グリッドの判定基準(6)の最適化のルールに適合する場合、
・ これらの三次元観測グリッドの判定基準(6)が、三次元観測グリッドの最適な判定基準(6’)となる。
・ 知識ベース(1)を、三次元観測グリッドの最適な判定基準(6’)で更新する(E32)。
・ 三次元グリッドの判定基準(6)を介してフィルタリングされた問題の三次元情報(13)を使用して、有用な三次元情報(14)を再構成する(D2)。
或いは、知識ベース(1)内のこのような三次元観測グリッドの判定基準(6)を変更し、グリッド判定基準を抽出するステップ(A32)と、これらの新しい判定基準(6)の最適化のためのルールに関係するステップを繰り返す。
【0039】
限定しない例として、最適な三次元観測グリッド(5’)とは、再構成(D1)が実行される、照射レーザービームの角度へ、受信レーザービームの角度又は励起超音波ビームの角度へ、及び/又は超音波受信角度へリンクされた最適なグリッドである。
【0040】
限定しない例として、三次元観測グリッドの最適な判定基準(6’)とは、再構成(D2)が実行される、照射レーザー角度の最適値、受信レーザー角度の最適値、照射レーザー角度のピッチの最適値、受信レーザー角度のピッチの最適値又は超音波励起角度の最適値、超音波受信角度の最適値、超音波励起角度のピッチの最適値、及び/又は超音波受信角度のピッチの最適値となる。
【0041】
次に、オブジェクトの有用な三次元情報(14)から開始される、オブジェクトの三次元情報(15)の再構成の最後のステップ(D3)について説明する。オブジェクトに関する有用な三次元情報(15)は、オブジェクトの最適な三次元再構成に対応する。認識状態ファイル(16)は、例えば、「オブジェクトが再構成されていない」、「知識ベースの拡張が必要」、「操作が遅延されている」、又は「ハードウェアが利用不可能」といったタイプの情報を与える。最後に、これは再構成方法に関するレポート要約ファイルである。
【0042】
このステップは、以下から構成されるサブステップを含む。
− 三次元再構成判定基準(7)及び関連する最適化のルールを知識ベース(1)からを抽出すること(A4)。
− オブジェクトに関する有用な三次元情報(14)が、知識ベース(1)からもたらされる三次元再構成判定基準(7)の最適化のルールに適合している場合、
・ このような三次元再構成判定基準(7)は、最適な三次元再構成判定基準(7’)となる。
・ 知識ベース(1)を最適な三次元再構成判定基準(7’)で更新する(E4)。
・ 三次元再構成判定基準(7)を介してフィルタリングされた有用な三次元情報(14)に基づいて、オブジェクトに関する三次元情報(15)を再構成し(D3)、認識状態ファイル(16)を提供する。
或いは、知識ベース(1)内のこのような三次元再構成判定基準(7)を変更し、再構成の判定基準を抽出するためのステップ(A4)と、これらの新しい判定基準(7)の最適化のためのルールに関係するステップを繰り返す。
【0043】
限定しない例として、最適な三次元再構成判定基準(7’)は、三次元再構成(D3)が実行される、ファセット数の最適値又は各ファセットのサイズの最適値となる。
【0044】
ステップ(A11)、(A12)、(A2)、(A31)、(A32)、(A4)、(B1)、(B2)、(B3)、(C)、(D1)、(D2)、及び(D3)は、情報、知識、データ、信号、及び人工知能手法を処理するための手法であり、各機能は、このような手法を特に複合化することにより達成される。
【0045】
本発明に係る方法は特に、リスク管理を目的として問題のオブジェクトを識別するプロセスを制御することや、自然災害、競争、環境、工業、医療及びバイオテクノロジー、原子力、石油、保安、輸送(空、道路、鉄道、海)等の分野でのパフォーマンスを制御することを意図する。
【特許請求の範囲】
【請求項1】
波にさらされたオブジェクトを、この曝露によってもたらされた感知信号(8)及び知識ベース(1)を起点として合成的に再構成する方法であって、
前記知識ベースが、直接モード検索判定基準(2)、前記弱信号を抽出するための判定基準(3)、直接モードで識別するための判定基準(4)、前記波の前記照射又は受信角度にリンクされた三次元観測グリッド(5)、三次元観測グリッドの判定基準(6)、三次元再構成判定基準(7)といった種々のフィルタリング判定基準と、前記直接モードで識別するための判定基準(4)、前記三次元観測グリッド(5)、前記三次元観測グリッドの判定基準(6)、前記三次元再構成判定基準(7)と関連付けられた最適化のルールと、対応する最適な判定基準(即ち、前記最適化のルールに従った)と、を含むことを特徴とすると共に、更に前記方法が、
◆直接モード検索判定基準(2)を前記知識ベース(1)から抽出するステップ(A11)と、
◆前記弱信号を抽出するための判定基準(3)を前記知識ベース(1)から抽出するステップ(A12)と、
◆直接モードで識別するための判定基準(4)及び前記関連する最適化のルールを前記知識ベース(1)から抽出するステップ(A2)と、
◆三次元観測グリッド(5)及び前記関連する最適化のルールを前記知識ベース(1)から抽出するステップ(A31)と、
◆三次元観測グリッドの判定基準(6)及び前記関連する最適化のルールを知識ベース(1)から抽出するステップ(A32)と、
◆三次元再構成判定基準(7)及び前記関連する最適化のルールを知識ベース(1)からを抽出するステップ(A4)と、
◆前記抽出された直接モード検索判定基準(2)を通してフィルタリングされた一連の感知信号(8)から、弱信号(9)を抽出するステップ(B1)と、
◆前記抽出された弱信号の抽出用の判定基準(3)を通してフィルタリングされた前記弱信号(9)から、問題の弱信号(10)を抽出するステップ(B2)と、
◆有用な弱信号(11)を取得するように、前記問題の弱信号(10)から前記ノイズを除去するステップ(B3)と、を含み、
◆前記有用な弱信号(11)が、前記直接モードで識別するための判定基準(4)の前記最適化のルールに適合している場合、
i. これらの抽出された、直接モードで抽出するための判定基準(3)が、直接モードで抽出するための最適な判定基準(3’)となり、
ii. 直接モードで抽出するための最適な判定基準(3’)で、前記知識ベース(1)を更新し(E1)、
iii.前記抽出された直接モード検索判定基準(2)が、最適な直接モード検索判定基準(2’)となり、
iv. 前記最適な直接モード検索判定基準(2’)で、前記知識ベース(1)を更新(E2)し、
v. 前記直接モードで識別するための判定基準(4)を通してフィルタリングされた有用な弱信号(11)に基づいて、有用な直接情報(12)を識別し(C)、
或いは、このような、前記弱信号を抽出するための判定基準(3)を変更し、これらの判定基準(3)を抽出するためのステップ(A12)、前記ステップ(B2)、(B3)、及び(C)、並びに前記判定基準(4)の前記最適化のルールに関係する前記ステップを繰り返すものとし、
前記有用な弱信号(11)が、前記直接モードで識別するための判定基準(4)の前記最適化のルールに適合していない場合は、前記知識ベース(1)内のこれらの直接モード検索判定基準(2)を変更し、これらの判定基準(2)の抽出ステップ(A11)、前記ステップ(B1)、(B2)、(B3)、及び(C)、並びに前記判定基準(4)の前記最適化のルールに関する前記ステップを繰り返し、
前記有用な直接情報(12)が、前記三次元観測グリッド(5)の前記最適化のルールに適合している場合、
i. これらの三次元観測グリッド(5)が、最適な三次元観測グリッド(5’)となり、
ii. 前記知識ベース(1)において、前記三次元観測グリッド(5)をこれらの最適な三次元観測グリッド(5’)で更新し(E31)、
iii.前記抽出された三次元観測グリッド(5)を介してフィルタリングされた前記有用な直接情報(12)に基づいて、問題の三次元情報(13)を再構成し(D1)、
或いは、前記知識ベース(1)内のこのような三次元観測グリッド(5)を変更し、前記グリッドを抽出するステップ(A31)、及びこれらの新しいグリッド(5)の前記最適化のルールに関係する前記ステップを繰り返し、
◆前記問題の三次元情報(13)が、前記三次元観測グリッドの判定基準(6)の前記最適化のルールに適合している場合、
i. これらの三次元観測グリッドの判定基準(6)が、三次元観測グリッドの最適な判定基準(6’)となり、
ii. 前記知識ベース(1)において、前記三次元観測グリッドの判定基準(6)をこれらの、三次元観測グリッドの最適な判定基準(6’)で更新し(E32)、
iii.前記抽出された、三次元観測グリッドの判定基準(6)を介してフィルタリングされた前記問題の三次元情報(13)に基づいて、有用な三次元情報(14)を再構成し(D2)、
或いは、前記知識ベース(1)内のこのような三次元観測グリッドの判定基準(6)を変更し、グリッド判定基準を抽出するステップ(A32)と、これらの新しい判定基準(6)の前記最適化のルールに関係するステップを繰り返し、
◆前記有用な三次元情報(14)が、前記三次元再構成判定基準(7)の前記最適化のルールに適合している場合、
i. このような抽出された三次元再構成判定基準(7)が最適な三次元再構成判定基準(7’)となり、
ii. 前記知識ベース(1)内において、前記三次元再構成判定基準(7)をこれらの最適な三次元再構成判定基準(7’)で更新し(E4)、
iii.前記抽出された三次元再構成判定基準(7)を介してフィルタリングされた前記有用な三次元情報(14)に基づいて、前記オブジェクトに関する三次元情報(15)を再構成し(D3)、認識状態ファイル(16)を決定し(D3)、
或いは、前記知識ベース(1)内のこのような三次元再構成判定基準(7)を変更し、再構成用の判定基準を抽出するステップ(A4)と、これらの新しい判定基準(7)の前記最適化のルールに関係するステップを繰り返すことを特徴とする方法。
【請求項2】
前記ステップ(B3)がまた、前記ノイズのない信号を増幅するステップを含むことを特徴とする請求項1に記載の方法。
【請求項3】
前記オブジェクトが電磁波にさらされることを特徴とする請求項1又は2に記載の方法。
【請求項4】
前記オブジェクトが、可視部分から赤外線、又はマイクロ波に及ぶレンジ内にある波長を有するレーザービームにさらされることを特徴とする請求項3に記載の方法。
【請求項5】
前記オブジェクトが弾性波にさらされることを特徴とする請求項1〜4のいずれか一項に記載の方法。
【請求項6】
前記オブジェクトが、超音波、音波、又は超低周波のレンジ内にある弾性波にさらされることを特徴とする請求項5に記載の方法。
【請求項7】
前記直接モード検索判定基準(2)が、振幅の相関性から、散乱強度相関から、時間系列から、確率密度から、スペクトルシグネチャから、及び/又は時間相関からもたらされる判定基準であることを特徴とする請求項1〜6のいずれか一項に記載の方法。
【請求項8】
前記弱信号を抽出するための判定基準(3)が、閾値、レンジ、及び/又は直接モード検索判定基準の評価のドメインからもたらされる判定基準であることを特徴とする請求項1〜7のいずれか一項に記載の方法。
【請求項9】
前記三次元観測グリッド(5)が、前記照射レーザービームの角度へ、前記受信レーザービームの角度又は前記励起超音波ビームの角度へ、及び/又は前記超音波受信角度へリンクされたグリッドであることを特徴とする請求項1〜8のいずれか一項に記載の方法。
【請求項10】
前記三次元観測グリッドの判定基準(6)が、前記照射レーザー角度の値、前記受信レーザー角度の値、前記照射レーザー角度のピッチの値、前記受信レーザー角度のピッチの値又は前記超音波励起角度の値、前記超音波受信角度の値、前記超音波励起角度のピッチの値、及び/又は前記超音波受信角度のピッチの値であることを特徴とする請求項1〜9のいずれか一項に記載の方法。
【請求項11】
前記三次元再構成判定基準(7)が、形状のパラメータ、ファセットのトポロジのパラメータ、ファセット数のパラメータ、前記オブジェクトのファセットサイズのパラメータ、及び/又は参照データベース及び/又は知識ベースによって供給されるオブジェクトの挙動のパラメータであることを特徴とする請求項1〜10のいずれか一項に記載の方法。
【請求項12】
前記有用な直接情報(12)が、前記有用な弱信号(11)から抽出された前記オブジェクトに対応する前記後方散乱及び/又は散乱エネルギータイプのデータサブセットを備えることを特徴とする請求項1〜11のいずれか一項に記載の方法。
【請求項13】
前記有用な三次元情報(14)が、不自然な結果を排除することによって改良された前記三次元再構成であることを特徴とする請求項1〜12のいずれか一項に記載の方法。
【請求項14】
前記オブジェクト(15)に関する前記3次元情報が、前記オブジェクトの前記最適な三次元再構成であることを特徴とする請求項1〜13のいずれか一項に記載の方法。
【請求項15】
前記認識状態ファイル(16)が、「オブジェクトが再構成されていない」、「知識ベースの拡張が必要」、「操作が遅延されている」、又は「ハードウェアが利用不可能」といったタイプの情報を含むことを特徴とする請求項1〜14のいずれか一項に記載の方法。
【請求項16】
前記最適化のルールが、パラメータの最大値、閾値比較、合致の数、時間ウィンドウ、スペクトルシグニチャ、又は時間・周波数スポットに関するタイプ検索であることを特徴とする請求項1〜15のいずれか一項に記載の方法。
【請求項17】
前記弱信号は、前記S/N比が低い、前記振幅又は前記強度が低い、前記含まれる情報がばらばらになっている、及び/又は前記含まれる情報が、偶然に発生した又は発生したマイクロイベントで構成されている信号であることを特徴とする請求項1〜16のいずれか一項に記載の方法。
【請求項1】
波にさらされたオブジェクトを、この曝露によってもたらされた感知信号(8)及び知識ベース(1)を起点として合成的に再構成する方法であって、
前記知識ベースが、直接モード検索判定基準(2)、前記弱信号を抽出するための判定基準(3)、直接モードで識別するための判定基準(4)、前記波の前記照射又は受信角度にリンクされた三次元観測グリッド(5)、三次元観測グリッドの判定基準(6)、三次元再構成判定基準(7)といった種々のフィルタリング判定基準と、前記直接モードで識別するための判定基準(4)、前記三次元観測グリッド(5)、前記三次元観測グリッドの判定基準(6)、前記三次元再構成判定基準(7)と関連付けられた最適化のルールと、対応する最適な判定基準(即ち、前記最適化のルールに従った)と、を含むことを特徴とすると共に、更に前記方法が、
◆直接モード検索判定基準(2)を前記知識ベース(1)から抽出するステップ(A11)と、
◆前記弱信号を抽出するための判定基準(3)を前記知識ベース(1)から抽出するステップ(A12)と、
◆直接モードで識別するための判定基準(4)及び前記関連する最適化のルールを前記知識ベース(1)から抽出するステップ(A2)と、
◆三次元観測グリッド(5)及び前記関連する最適化のルールを前記知識ベース(1)から抽出するステップ(A31)と、
◆三次元観測グリッドの判定基準(6)及び前記関連する最適化のルールを知識ベース(1)から抽出するステップ(A32)と、
◆三次元再構成判定基準(7)及び前記関連する最適化のルールを知識ベース(1)からを抽出するステップ(A4)と、
◆前記抽出された直接モード検索判定基準(2)を通してフィルタリングされた一連の感知信号(8)から、弱信号(9)を抽出するステップ(B1)と、
◆前記抽出された弱信号の抽出用の判定基準(3)を通してフィルタリングされた前記弱信号(9)から、問題の弱信号(10)を抽出するステップ(B2)と、
◆有用な弱信号(11)を取得するように、前記問題の弱信号(10)から前記ノイズを除去するステップ(B3)と、を含み、
◆前記有用な弱信号(11)が、前記直接モードで識別するための判定基準(4)の前記最適化のルールに適合している場合、
i. これらの抽出された、直接モードで抽出するための判定基準(3)が、直接モードで抽出するための最適な判定基準(3’)となり、
ii. 直接モードで抽出するための最適な判定基準(3’)で、前記知識ベース(1)を更新し(E1)、
iii.前記抽出された直接モード検索判定基準(2)が、最適な直接モード検索判定基準(2’)となり、
iv. 前記最適な直接モード検索判定基準(2’)で、前記知識ベース(1)を更新(E2)し、
v. 前記直接モードで識別するための判定基準(4)を通してフィルタリングされた有用な弱信号(11)に基づいて、有用な直接情報(12)を識別し(C)、
或いは、このような、前記弱信号を抽出するための判定基準(3)を変更し、これらの判定基準(3)を抽出するためのステップ(A12)、前記ステップ(B2)、(B3)、及び(C)、並びに前記判定基準(4)の前記最適化のルールに関係する前記ステップを繰り返すものとし、
前記有用な弱信号(11)が、前記直接モードで識別するための判定基準(4)の前記最適化のルールに適合していない場合は、前記知識ベース(1)内のこれらの直接モード検索判定基準(2)を変更し、これらの判定基準(2)の抽出ステップ(A11)、前記ステップ(B1)、(B2)、(B3)、及び(C)、並びに前記判定基準(4)の前記最適化のルールに関する前記ステップを繰り返し、
前記有用な直接情報(12)が、前記三次元観測グリッド(5)の前記最適化のルールに適合している場合、
i. これらの三次元観測グリッド(5)が、最適な三次元観測グリッド(5’)となり、
ii. 前記知識ベース(1)において、前記三次元観測グリッド(5)をこれらの最適な三次元観測グリッド(5’)で更新し(E31)、
iii.前記抽出された三次元観測グリッド(5)を介してフィルタリングされた前記有用な直接情報(12)に基づいて、問題の三次元情報(13)を再構成し(D1)、
或いは、前記知識ベース(1)内のこのような三次元観測グリッド(5)を変更し、前記グリッドを抽出するステップ(A31)、及びこれらの新しいグリッド(5)の前記最適化のルールに関係する前記ステップを繰り返し、
◆前記問題の三次元情報(13)が、前記三次元観測グリッドの判定基準(6)の前記最適化のルールに適合している場合、
i. これらの三次元観測グリッドの判定基準(6)が、三次元観測グリッドの最適な判定基準(6’)となり、
ii. 前記知識ベース(1)において、前記三次元観測グリッドの判定基準(6)をこれらの、三次元観測グリッドの最適な判定基準(6’)で更新し(E32)、
iii.前記抽出された、三次元観測グリッドの判定基準(6)を介してフィルタリングされた前記問題の三次元情報(13)に基づいて、有用な三次元情報(14)を再構成し(D2)、
或いは、前記知識ベース(1)内のこのような三次元観測グリッドの判定基準(6)を変更し、グリッド判定基準を抽出するステップ(A32)と、これらの新しい判定基準(6)の前記最適化のルールに関係するステップを繰り返し、
◆前記有用な三次元情報(14)が、前記三次元再構成判定基準(7)の前記最適化のルールに適合している場合、
i. このような抽出された三次元再構成判定基準(7)が最適な三次元再構成判定基準(7’)となり、
ii. 前記知識ベース(1)内において、前記三次元再構成判定基準(7)をこれらの最適な三次元再構成判定基準(7’)で更新し(E4)、
iii.前記抽出された三次元再構成判定基準(7)を介してフィルタリングされた前記有用な三次元情報(14)に基づいて、前記オブジェクトに関する三次元情報(15)を再構成し(D3)、認識状態ファイル(16)を決定し(D3)、
或いは、前記知識ベース(1)内のこのような三次元再構成判定基準(7)を変更し、再構成用の判定基準を抽出するステップ(A4)と、これらの新しい判定基準(7)の前記最適化のルールに関係するステップを繰り返すことを特徴とする方法。
【請求項2】
前記ステップ(B3)がまた、前記ノイズのない信号を増幅するステップを含むことを特徴とする請求項1に記載の方法。
【請求項3】
前記オブジェクトが電磁波にさらされることを特徴とする請求項1又は2に記載の方法。
【請求項4】
前記オブジェクトが、可視部分から赤外線、又はマイクロ波に及ぶレンジ内にある波長を有するレーザービームにさらされることを特徴とする請求項3に記載の方法。
【請求項5】
前記オブジェクトが弾性波にさらされることを特徴とする請求項1〜4のいずれか一項に記載の方法。
【請求項6】
前記オブジェクトが、超音波、音波、又は超低周波のレンジ内にある弾性波にさらされることを特徴とする請求項5に記載の方法。
【請求項7】
前記直接モード検索判定基準(2)が、振幅の相関性から、散乱強度相関から、時間系列から、確率密度から、スペクトルシグネチャから、及び/又は時間相関からもたらされる判定基準であることを特徴とする請求項1〜6のいずれか一項に記載の方法。
【請求項8】
前記弱信号を抽出するための判定基準(3)が、閾値、レンジ、及び/又は直接モード検索判定基準の評価のドメインからもたらされる判定基準であることを特徴とする請求項1〜7のいずれか一項に記載の方法。
【請求項9】
前記三次元観測グリッド(5)が、前記照射レーザービームの角度へ、前記受信レーザービームの角度又は前記励起超音波ビームの角度へ、及び/又は前記超音波受信角度へリンクされたグリッドであることを特徴とする請求項1〜8のいずれか一項に記載の方法。
【請求項10】
前記三次元観測グリッドの判定基準(6)が、前記照射レーザー角度の値、前記受信レーザー角度の値、前記照射レーザー角度のピッチの値、前記受信レーザー角度のピッチの値又は前記超音波励起角度の値、前記超音波受信角度の値、前記超音波励起角度のピッチの値、及び/又は前記超音波受信角度のピッチの値であることを特徴とする請求項1〜9のいずれか一項に記載の方法。
【請求項11】
前記三次元再構成判定基準(7)が、形状のパラメータ、ファセットのトポロジのパラメータ、ファセット数のパラメータ、前記オブジェクトのファセットサイズのパラメータ、及び/又は参照データベース及び/又は知識ベースによって供給されるオブジェクトの挙動のパラメータであることを特徴とする請求項1〜10のいずれか一項に記載の方法。
【請求項12】
前記有用な直接情報(12)が、前記有用な弱信号(11)から抽出された前記オブジェクトに対応する前記後方散乱及び/又は散乱エネルギータイプのデータサブセットを備えることを特徴とする請求項1〜11のいずれか一項に記載の方法。
【請求項13】
前記有用な三次元情報(14)が、不自然な結果を排除することによって改良された前記三次元再構成であることを特徴とする請求項1〜12のいずれか一項に記載の方法。
【請求項14】
前記オブジェクト(15)に関する前記3次元情報が、前記オブジェクトの前記最適な三次元再構成であることを特徴とする請求項1〜13のいずれか一項に記載の方法。
【請求項15】
前記認識状態ファイル(16)が、「オブジェクトが再構成されていない」、「知識ベースの拡張が必要」、「操作が遅延されている」、又は「ハードウェアが利用不可能」といったタイプの情報を含むことを特徴とする請求項1〜14のいずれか一項に記載の方法。
【請求項16】
前記最適化のルールが、パラメータの最大値、閾値比較、合致の数、時間ウィンドウ、スペクトルシグニチャ、又は時間・周波数スポットに関するタイプ検索であることを特徴とする請求項1〜15のいずれか一項に記載の方法。
【請求項17】
前記弱信号は、前記S/N比が低い、前記振幅又は前記強度が低い、前記含まれる情報がばらばらになっている、及び/又は前記含まれる情報が、偶然に発生した又は発生したマイクロイベントで構成されている信号であることを特徴とする請求項1〜16のいずれか一項に記載の方法。
【図1】


【図2】
【図2】
【公表番号】特表2011−521204(P2011−521204A)
【公表日】平成23年7月21日(2011.7.21)
【国際特許分類】
【出願番号】特願2011−501200(P2011−501200)
【出願日】平成21年3月24日(2009.3.24)
【国際出願番号】PCT/EP2009/053447
【国際公開番号】WO2009/118314
【国際公開日】平成21年10月1日(2009.10.1)
【出願人】(505157485)テールズ (231)
【出願人】(510255060)
【Fターム(参考)】
【公表日】平成23年7月21日(2011.7.21)
【国際特許分類】
【出願日】平成21年3月24日(2009.3.24)
【国際出願番号】PCT/EP2009/053447
【国際公開番号】WO2009/118314
【国際公開日】平成21年10月1日(2009.10.1)
【出願人】(505157485)テールズ (231)
【出願人】(510255060)
【Fターム(参考)】
[ Back to top ]