
電線の弛み吸収装置及び電線の弛み吸収方法
【課題】電線の弛みを確実に吸収することができる電線の弛み吸収装置及び電線の弛み吸収方法を提供する。
【解決手段】電線の弛み吸収装置は、送出ロールと、エンコーダと、押圧部24と、制御回路を有した制御装置とを備えている。送出ロールは、電線5を該電線5の長手方向に沿って移動させる。エンコーダは、電線5の移動距離を検出する。押圧部24は、電線5の移動方向Pに直交(交差)する方向に沿って電線5を押圧する。制御回路は、所定のパターンにしたがって送出ロールに電線5を断続的に移動させる。さらに、制御回路は、エンコーダの検出した電線5の移動距離に応じて送出ロールに電線5を停止させる直前から一定時間後まで、押圧部24に電線5を押圧させる。
【解決手段】電線の弛み吸収装置は、送出ロールと、エンコーダと、押圧部24と、制御回路を有した制御装置とを備えている。送出ロールは、電線5を該電線5の長手方向に沿って移動させる。エンコーダは、電線5の移動距離を検出する。押圧部24は、電線5の移動方向Pに直交(交差)する方向に沿って電線5を押圧する。制御回路は、所定のパターンにしたがって送出ロールに電線5を断続的に移動させる。さらに、制御回路は、エンコーダの検出した電線5の移動距離に応じて送出ロールに電線5を停止させる直前から一定時間後まで、押圧部24に電線5を押圧させる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、一方向に沿って断続的に移動する電線の弛みを吸収する電線の弛み吸収装置及び電線の弛み吸収方法に関する。
【背景技術】
【0002】
移動体としての自動車等には、種々の電子機器が搭載される。このため、前記自動車等は、前記電子機器に電源等からの電力やコンピュータ等からの制御信号等を伝えるために、ワイヤハーネスを配索している。ワイヤハーネスは、複数の電線と、該電線の端部等に取り付けられたコネクタ等を備えている。
【0003】
電線は、導電性の芯線と、該芯線を被覆する絶縁性の合成樹脂からなる被覆部とを備えている。電線は、所謂被覆電線である。コネクタは、端子金具と、該端子金具を収容するコネクタハウジングとを備えている。端子金具は、導電性の板金等からなり、電線の端部に取り付けられてこの電線の芯線と電気的に接続する。コネクタハウジングは、絶縁性の合成樹脂からなり箱状に形成されている。ワイヤハーネスは、コネクタハウジングが前述した電子機器等と結合することにより、端子金具を介して各電線が前述した電子機器と電気的に接続して、前述した電子機器に所要の電力や信号を伝える。
【0004】
前述したワイヤハーネスの電線は、芯線の大きさ、被覆部の材質(耐熱性の有無等)や使用目的等を識別する必要がある。使用目的とは、例えば、エアバックやABS(Antilock Brake System)等の制御信号や、動力伝達系統等の電線が用いられる自動車の系統(システム)である。そこで、ワイヤハーネスに用いられる電線は、前述した使用目的(系統)等を識別するために、外表面が所望の色に着色されている。
【0005】
前記ワイヤハーネスを組み立てる際には、まずローラに巻き取られた長尺の電線の外表面を所望の色に着色しかつ該電線を所定の長さに切断した後、該電線の端部等の被覆部を除去(皮むき)して端子金具を取り付ける。必要に応じて電線同士を接続する。その後、端子金具をコネクタハウジング内に挿入する。こうして、前述したワイヤハーネスを組み立てる。
【0006】
前述したように長尺の電線の外表面を着色して該電線を所定の長さに切断する際には、電線切断装置が用いられている(例えば、特許文献1参照)。この電線切断装置は、装置本体としてのフレームと、ガイドロールと、送出ロールと、切断機構とを少なくとも備えている。電線切断装置には、着色装置が取り付けられている。
【0007】
ガイドロールは、フレームの一端部に回転自在に支持され、切断前の長尺の電線を巻き付けている。送出ロールは、フレームの他端部に回転自在に支持されて、一対設けられている。一対の送出ロールは、互いの間に電線を挟み込んで、電線の長手方向に沿って電線を引っ張って該電線を移動させる。切断機構は、送出ロールよりも電線の移動方向の下流側に配されている。着色装置は、ガイドロールと送出ロールとの間に配されている。
【0008】
前述した構成の電線切断装置は、一対の送出ロールが断続的に回転することで電線を所定の長さずつ断続的に移動させる。電線が移動している間に、着色装置によって電線の外表面が着色される。そして、電線が停止すると、切断機構によって電線が切断される。
【0009】
このように電線が断続的に移動すると、電線が停止する時及び停止した電線が再び移動する時に、電線の慣性によって電線に弛みが生じる。このような電線の弛みを吸収するために、電線切断装置には弛み吸収装置が取り付けられている。弛み吸収装置は、ガイドロールと着色装置との間に設けられている。弛み吸収装置は、一対の案内ローラ支持フレームと、一対の案内ローラと、移動ローラ支持フレームと、移動ローラと、エアシリンダとを備えている。
【0010】
一対の案内ローラ支持フレームは、フレームに固定され、それぞれ案内ローラを回転自在に支持する。一対の案内ローラは電線の下方に配されている。移動ローラ支持フレームは、フレームに固定され、移動ローラを回転自在に支持する。移動ローラは、電線の上方に配され、電線の移動方向に沿って一対の案内ローラの間に配されている。エアシリンダは、シリンダ本体と、シリンダ本体から伸縮自在な伸縮ロッドとを備えている。シリンダ本体は、移動ローラ支持フレームに固定され、電線の上方に配されている。伸縮ロッドは、シリンダ本体から下方(即ち、電線に近づく方向)に向かって伸縮する。伸縮ロッドには、移動ローラが取り付けられている。
【0011】
一対の送出ロールが停止すると、電線の慣性によって特に一対の案内ローラ間の電線に弛みが生じる。すると、前述した構成の弛み吸収装置は、エアシリンダの伸縮ロッドを伸長させて移動ローラを下方に変位させ、電線を電線の移動方向に直交する方向に沿って付勢することで弛みを吸収する。
【特許文献1】特開2004−134371号公報
【発明の開示】
【発明が解決しようとする課題】
【0012】
しかしながら、前述した構成の弛み吸収装置では、送出ロールが停止した後にエアシリンダの伸縮ロッドが伸長して移動ローラが下方に変位するので、電線に一旦弛みが生じて電線があばれてしまう。そして、このように弛んであばれている電線の外表面を着色すると、着色パターンが乱れてしまい、予め定められた着色パターンと異なったものになって電線同士の識別が困難になるといった問題があった。
【0013】
本発明は、このような問題を解決することを目的としている。即ち、本発明は、電線の弛みを確実に吸収することができる電線の弛み吸収装置及び電線の弛み吸収方法を提供することを目的としている。
【課題を解決するための手段】
【0014】
前記課題を解決し目的を達成するために、請求項1に記載された発明は、一方向に沿って断続的に移動する電線の弛みを吸収する電線の弛み吸収装置において、前記電線を該電線の長手方向に沿って移動させる移動手段と、所定のパターンにしたがって前記移動手段に前記電線を断続的に移動させる制御手段と、前記電線の移動距離を検出する検出手段と、前記電線の移動方向に交差する方向に沿って前記電線を押圧する押圧手段と、を備えるとともに、前記制御手段が、前記検出手段の検出した前記電線の移動距離に応じて前記移動手段に前記電線を停止させる直前から一定時間後まで、前記押圧手段に前記電線を押圧させることを特徴とした電線の弛み吸収装置である。
【0015】
請求項2に記載された発明は、一方向に沿って断続的に移動する電線の弛みを吸収する電線の弛み吸収装置において、前記電線を該電線の長手方向に沿って移動させる移動手段と、所定のパターンにしたがって前記移動手段に前記電線を断続的に移動させる制御手段と、前記電線の移動距離を検出する検出手段と、前記電線の移動方向に交差する方向に沿って前記電線を押圧する押圧手段と、を備えるとともに、前記制御手段が、前記検出手段の検出した前記電線の移動距離に応じて前記移動手段に前記電線を停止させた後に再び前記電線を移動させる直前から一定時間後まで、前記押圧手段に前記電線を押圧させることを特徴とした電線の弛み吸収装置である。
【0016】
請求項3に記載された発明は、請求項1に記載された電線の弛み吸収装置において、前記制御手段が、前記検出手段の検出した前記電線の移動距離に応じて前記移動手段に前記電線を停止させた後に再び前記電線を移動させる直前から一定時間後まで、前記押圧手段に前記電線を押圧させることを特徴とした電線の弛み吸収装置である。
【0017】
請求項4に記載された発明は、請求項1ないし請求項3のうちいずれか一項に記載された電線の弛み吸収装置において、前記押圧手段が、その外周面が前記電線と接触して回転自在に設けられ、かつ、前記制御手段からの命令によって前記電線を押圧するローラ部材を備えたことを特徴とした電線の弛み吸収装置である。
【0018】
請求項5に記載された発明は、請求項4に記載された電線の弛み吸収装置において、前記ローラ部材の回転を停止させるブレーキ部を備えたことを特徴とした電線の弛み吸収装置である。
【0019】
請求項6に記載された発明は、請求項4または請求項5に記載された電線の弛み吸収装置において、前記ローラ部材を常に前記電線に向かって付勢する付勢手段を備えたことを特徴とした電線の弛み吸収装置である。
【0020】
請求項7に記載された発明は、請求項1ないし請求項6のうちいずれか一項に記載された電線の弛み吸収装置において、前記電線の外表面を着色する着色手段を備えたことを特徴とした電線の弛み吸収装置である。
【0021】
請求項8に記載された発明は、一方向に沿って断続的に移動する電線の弛みを吸収する電線の弛み吸収方法において、前記電線の移動距離に応じて前記電線を停止させる直前から一定時間後まで、前記電線を該電線の移動方向に交差する方向に沿って押圧することを特徴とした電線の弛み吸収方法である。
【0022】
請求項9に記載された発明は、一方向に沿って断続的に移動する電線の弛みを吸収する電線の弛み吸収方法において、前記電線の移動距離に応じて前記電線を停止させた後に再び前記電線を移動させる直前から一定時間後まで、前記電線を該電線の移動方向に交差する方向に沿って押圧することを特徴とした電線の弛み吸収方法である。
【発明の効果】
【0023】
請求項1に記載された発明によれば、制御手段が、電線が停止する直前から一定時間後まで押圧手段に電線を押圧させるので、押圧手段が電線の停止時に電線の弛み始める前から電線の停止した後まで電線を押圧することで、電線の停止時前後における電線の弛みを確実に防止することができる。
【0024】
請求項2に記載された発明によれば、制御手段が、電線が停止した後に再び移動する直前から一定時間後まで押圧手段に電線を押圧させるので、押圧手段が電線の移動開始時に電線の弛み始める前から電線の移動後まで電線を押圧することで、電線の移動開始時前後における電線の弛みを確実に防止することができる。
【0025】
請求項3に記載された発明によれば、制御手段が、電線が停止する直前から一定時間後まで押圧手段に電線を押圧させるとともに、電線が停止した後に再び移動する直前から一定時間後まで押圧手段に電線を押圧させるので、電線の停止時と移動開始時との双方における電線の弛みを確実に防止することができる。
【0026】
請求項4に記載された発明によれば、押圧手段が、その外周面が電線と接触して回転自在に設けられかつ制御手段からの命令によって電線を押圧するローラ部材を備えているので、電線を押圧する際にローラ部材が回転することで電線とローラ部材との摩擦力が緩和され、電線との接触部分の部品の消耗を軽減することができる。
【0027】
請求項5に記載された発明によれば、ローラ部材の回転を停止させるブレーキ部を備えているので、自らの慣性や電線の慣性によるローラ部材の回転を停止させ、この停止させた状態のローラ部材で電線の停止時や移動開始時に電線を押圧することで、電線を確実に押圧することができる。
【0028】
請求項6に記載された発明によれば、ローラ部材を常に電線に向かって付勢する付勢手段を備えているので、電線に常に一定のテンションが付与されて、電線の弛みを更に確実に防止することができるとともに、移動中の電線の弛みを防止することができる。
【0029】
請求項7に記載された発明によれば、電線の外表面を着色する着色手段を備えているので、弛みのない状態の電線の外表面を着色することができ、電線を予め定められたパターンに確実に着色して電線同士の識別を確実に行うことができる。
【0030】
請求項8に記載された発明によれば、電線の移動距離に応じて電線を停止させる直前から一定時間後まで、電線を該電線の移動方向に交差する方向に沿って押圧するので、電線の停止時における電線の弛みを確実に防止することができる。
【0031】
請求項9に記載された発明によれば、電線の移動距離に応じて電線を停止させた後に再び電線を移動させる直前から一定時間後まで、電線を該電線の移動方向に交差する方向に沿って押圧するので、電線の移動開始時における電線の弛みを確実に防止することができる。
【発明を実施するための最良の形態】
【0032】
以下、本発明の一実施形態にかかる電線の弛み吸収装置(以下、単に弛み吸収装置という)を図1ないし図7を参照して説明する。本発明の一実施形態にかかる弛み吸収装置1は、例えば長尺の電線5の外表面5aを着色して該電線5を所定の長さに切断するとき、該電線5をその長手方向に沿って断続的に移動させる際の電線5の弛みを吸収する装置である。
【0033】
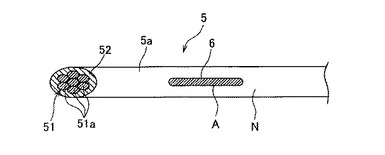
電線5は、図7に示すように、導電性の芯線51と、絶縁性の被覆部52とを備えている。芯線51は、複数の素線51aが撚られて形成されている。芯線51を構成する素線51aは、導電性の金属からなる。また、芯線51は、一本の素線から構成されていてもよい。被覆部52は、例えば、ポリ塩化ビニル等の合成樹脂からなる。被覆部52は、芯線51を被覆している。このため、被覆部52の外表面は、電線5の外表面5aをなしている。
【0034】
このような被覆部52は、単色Nとされている(図7中、白抜きで示す)。なお、被覆部52を構成する合成樹脂に所望の着色剤を混入することで電線5の外表面5aを単色Nにしてもよく、また、被覆部52を構成する合成樹脂に着色剤を混入することなく単色Nを合成樹脂自体の色としてもよい。後者のように単色Nが合成樹脂自体の色である場合、被覆部52即ち電線5の外表面5aは、無着色であるという。このように、無着色とは、被覆部52を構成する合成樹脂に着色剤を混入せずに、電線5の外表面5aが合成樹脂自体の色であることを示している。
【0035】
電線5の外表面5aが着色されると、電線5の外表面5aには、例えば、図7に示すような印6が形成される。印6の色は、色A(図7中、平行斜線で示す)である。色Aは、単色Nとは異なる。印6は、予め定められたパターンにしたがって、その形状や配置(電線5上の位置)等が決定される。
【0036】
前述した構成の電線5は、後述する切断機構17によって所定の長さで切断された後、複数束ねられるとともに端部等にコネクタ等が取り付けられて、ワイヤハーネスを構成する。そして、コネクタが自動車等の各種の電子機器のコネクタにコネクタ結合して、ワイヤハーネス即ち電線5は、各電子機器に各種の信号や電力を伝える。
【0037】
前述した印6の色Aを種々の色に変更することにより、電線5同士を識別可能としている。印6の色は、ワイヤハーネスの電線5の線種、系統(システム)の識別等を行う際の目印となる。即ち、前述した電線5の印6の色は、ワイヤハーネスの各電線5の使用目的を識別するために用いられる。
【0038】
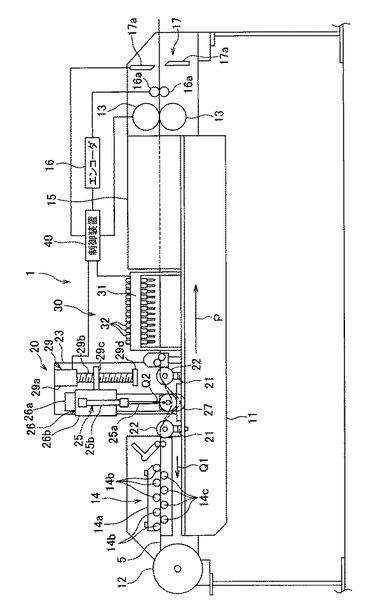
弛み吸収装置1は、図1に示すように、装置本体としてのフレーム11と、ガイドロール12と、移動手段としての送出ロール13と、張力付与手段としての矯正ユニット14と、弛み吸収ユニット20と、着色手段としての着色ユニット30と、ダクト15と、検出手段としてのエンコーダ16と、加工手段としての切断機構17と、制御装置40とを備えている。
【0039】
フレーム11は、工場等のフロア上等に設置される。フレーム11は、水平方向に伸びている。ガイドロール12は、フレーム11の一端部に回転自在に取り付けられている。ガイドロール12は、長尺でかつ印6が形成されていない電線5を巻いている。ガイドロール12は、矯正ユニット14と弛み吸収ユニット20と着色ユニット30とダクト15とエンコーダ16と切断機構17とに順に、電線5を送り出す。
【0040】
送出ロール13は、フレーム11の他端部に一対設けられている。一対の送出ロール13は、フレーム11に回転自在に支持されかつ鉛直方向に沿って並べられている。送出ロール13は、図示しないモータ等の駆動源により、互いに逆方向に同回転数で回転される。一対の送出ロール13は、互いの間に電線5を挟み、かつこの電線5の長手方向に沿って該電線5をガイドロール12から引っ張る。
【0041】
前述した構成の送出ロール13は、電線5の長手方向に沿って電線5を移動させることで、電線5と後述する噴出ユニット32とを電線5の長手方向に沿って相対的に移動させる。さらに、送出ロール13は、制御装置40に接続されて該制御装置40からの命令によって回転及び停止を繰り返すことで、電線5の長手方向に沿って電線5を断続的に移動させる。電線5は、ガイドロール12から送出ロール13に向かって図1中の矢印P方向に沿って移動する。矢印Pは、電線5の移動方向Pをなしている。
【0042】
矯正ユニット14は、ガイドロール12の送出ロール13側に設けられ、ガイドロール12と送出ロール13との間に設けられている。即ち、矯正ユニット14は、ガイドロール12より電線5の移動方向Pの下流側に設けられ、送出ロール13より電線5の移動方向Pの上流側に設けられている。矯正ユニット14は、板状のユニット本体14aと、複数の第1ローラ14bと、複数の第2ローラ14cとを備えている。ユニット本体14aは、フレーム11に固定されている。
【0043】
第1ローラ14bと第2ローラ14cとは、それぞれ、ユニット本体14aに回転自在に支持されている。複数の第1ローラ14bは、電線5の移動方向Pに沿って並べられ、電線5の上方に配されている。複数の第2ローラ14cは、電線5の移動方向Pに沿って並べられ、電線5の下方に配されている。第1ローラ14bと第2ローラ14cとは、千鳥状に配されている。
【0044】
前述した構成の矯正ユニット14は、送出ロール13によってガイドロール12から送り出される電線5を第1ローラ14bと第2ローラ14cとの間に挟む。そして、矯正ユニット14は、電線5を直線状にする。また、矯正ユニット14は、第1ローラ14bと第2ローラ14cとの間に電線5を挟むことで、該電線5に摩擦力を付与する。即ち、矯正ユニット14は、送出ロール13が電線5を引っ張る方向(電線5の移動方向P)と逆方向の第1の付勢力Q1の摩擦力を電線5に付与する。この第1の付勢力Q1は、送出ロール13が電線5を引っ張る力よりも弱い。このため、矯正ユニット14は、電線5にその長手方向に沿った張力を付与して、該電線5を張る。
【0045】
弛み吸収ユニット20は、矢印Pに沿って断続的に移動する電線5の弛みを吸収する。弛み吸収ユニット20は、矯正ユニット14の送出ロール13側に設けられ、矯正ユニット14と送出ロール13との間に設けられている。即ち、弛み吸収ユニット20は、矯正ユニット14より電線5の移動方向Pの下流側に設けられ、送出ロール13より電線5の移動方向Pの上流側に設けられている。
【0046】
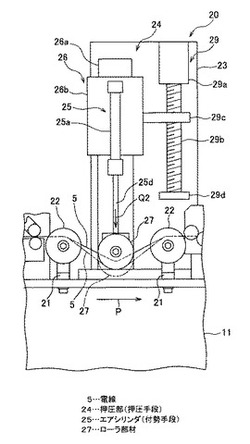
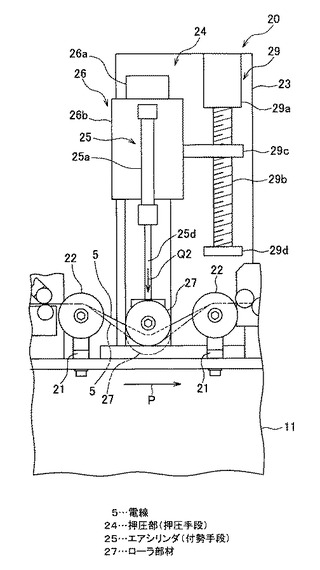
弛み吸収ユニット20は、図2に示すように、一対の案内ローラ支持フレーム21と、一対の案内ローラ22と、押圧部支持フレーム23と、押圧手段としての押圧部24とを備えている。
【0047】
案内ローラ支持フレーム21は、フレーム11に固定されている。案内ローラ支持フレーム21は、フレーム11から上方に立設している。一対の案内ローラ支持フレーム21は、電線5の移動方向Pに沿って、互いに間隔をあけて並べられている。
【0048】
一対の案内ローラ22は、それぞれ、案内ローラ支持フレーム21に回転自在に支持されている。案内ローラ22は、電線5の下方に配され、その外周面が電線5と接触することで電線5の移動方向Pから電線5が脱落しないように電線5を案内する。このため、案内ローラ22は、電線5の移動方向Pを案内する。
【0049】
押圧部支持フレーム23は、フレーム11に固定されている。押圧部支持フレーム23は、フレーム11から上方に立設している。押圧部支持フレーム23は、一対の案内ローラ支持フレーム21の近傍に設けられている。
【0050】
押圧部24は、リニアガイド26と、駆動部29と、ローラ部材27と、図示しないブレーキ部とを備えている。リニアガイド26は、押圧部支持フレーム23に取り付けられている。リニアガイド26は、レール26aと、スライダ26bとを備えている。レール26aは、押圧部支持フレーム23の外表面に固定されている。レール26aは、直線状に形成され、鉛直方向に沿って設けられている。スライダ26bは、レール26aに該レール26aの長手方向に沿って移動自在に支持されている。スライダ26bには、付勢手段としてのエアシリンダ25が取り付けられている。
【0051】
エアシリンダ25は、シリンダ本体25aと、このシリンダ本体25aから伸縮自在な伸縮ロッド25bとを備えている。シリンダ本体25aは、スライダ26bに固定され、電線5の上方に配されている。伸縮ロッド25bは、シリンダ本体25aから鉛直方向に沿って下方に伸長する。即ち、伸縮ロッド25bは、シリンダ本体25aから電線5に近づく方向に伸長する。
【0052】
前述した構成のエアシリンダ25の伸縮ロッド25bには、ローラ部材27が取り付けられている。エアシリンダ25は、シリンダ本体25a内に加圧された気体が供給されることで、伸縮ロッド25b即ちローラ部材27を第2の付勢力Q2で鉛直方向に沿って下方に常に付勢する。このように、エアシリンダ25は、ローラ部材27を電線5に向かって第2の付勢力Q2で常に付勢する。第2の付勢力Q2は、第1の付勢力Q1より弱い。
【0053】
駆動部29は、駆動源としてのモータ29aと、ねじ軸29bと、ナット29cとを備えている。モータ29aは、押圧部支持フレーム23に固定されている。ねじ軸29bは、鉛直方向に沿って配されている。ねじ軸29bの一端部はモータ29aの出力軸と連結され、ねじ軸29bの他端部は押圧部支持フレーム23に固定された軸受け29dに支持されている。このように、ねじ軸29bは、押圧部支持フレーム23に軸心回りに回転自在に支持されている。ナット29cは、ねじ軸29bに螺合するとともに、スライダ26bに固定されている。
【0054】
前述した構成の駆動部29のモータ29aが作動すると、モータ29aの出力軸が回転してねじ軸29bが回転し、ナット29cが鉛直方向に沿って移動して、スライダ26bがレール26aの長手方向即ち鉛直方向に沿って移動する。スライダ26bが鉛直方向に沿って移動すると、スライダ26bに固定されたエアシリンダ25が鉛直方向に沿って移動し、エアシリンダ25の伸縮ロッド25bに取り付けられたローラ部材27が鉛直方向に沿って移動する。このように、駆動部29は、ローラ部材27を鉛直方向に沿って移動させる。
【0055】
ローラ部材27は、エアシリンダ25の伸縮ロッド25bに回転自在に支持されているとともに、エアシリンダ25及びリニアガイド26によって鉛直方向に沿って移動自在に支持されている。ローラ部材27は、電線5の上方に配され、一対の案内ローラ22間の中央に配されている。ローラ部材27は、鉛直方向に沿って移動自在に支持されることで、電線5の移動方向Pに直交(交差)する方向に沿って移動自在に支持されている。ローラ部材27は、制御回路43からの命令によって駆動部29がスライダ26bを鉛直方向に沿って下方に移動させると電線5を押圧し、その外周面が電線5の外表面5aと接触して回転自在に設けられている。
【0056】
ブレーキ部は、ローラ部材27の前述した回転を停止させるものであり、例えば、周知のパウダーブレーキや摩擦板ブレーキ等である。ブレーキ部は、例えば電線5の停止時や移動開始時に制御回路43からの命令によって作動してローラ部材27の回転を停止させて、ローラ部材27にさらに確実に電線5を押圧させる。ブレーキ部は、ローラ部材27の回転を停止させるものであれば、その機構が機械的なものでも電磁的なものでもよい。
【0057】
切断機構17の後述する一対の切断刃17aが互いに近づいて、電線5を切断するために一旦電線5が停止する際に、慣性により矢印Pに沿って電線5が進み、該電線5は特に一対の案内ローラ22間で弛もうとする。前述した構成の弛み吸収ユニット20の押圧部24は、電線5が停止する直前にスライダ26bが初期位置から鉛直方向に沿って下方に移動することでローラ部材27も鉛直方向に沿って下方に移動し(図2中、二点鎖線で示す)、ローラ部材27が電線5を鉛直方向に沿って押圧し始める。また、ローラ部材27は、電線5が停止した後も電線5を鉛直方向に沿って押圧して、電線5の弛みを吸収する。なお、この鉛直方向は、電線5の移動方向Pに直交(交差)する方向に相当する。
【0058】
また、電線5が停止すると、エアシリンダ25の伸縮ロッド25bが伸長してローラ部材27を第2の付勢力Q2で電線5に向かって付勢し、電線5に一定のテンションを付与する。こうして、弛み吸収ユニット20は、電線5が停止する直前から停止した後まで、電線5の弛みを吸収しかつ該電線5に一定のテンションを付与する。
【0059】
また、停止した電線5が再び移動する際にも、慣性によって該電線5は弛もうとする。前述した構成の弛み吸収ユニット20の押圧部24は前述したように停止した電線5の弛みを吸収し、エアシリンダ25は電線5に一定のテンションを付与している。そして、押圧部24は、電線5が移動し始めるとともにスライダ26bが鉛直方向に沿って上方に移動し始めるが、このときもローラ部材27は電線5を鉛直方向に沿って押圧している。また、エアシリンダ25の伸縮ロッド25bが縮みながらローラ部材27を第2の付勢力Q2で電線5に向かって付勢し、電線5に一定のテンションを付与している。そして、電線5が移動して所定時間が経過すると、スライダ26bが初期位置に戻ってローラ部材27による電線5の押圧が解除される。
【0060】
着色ユニット30は、ユニット本体31と、複数の噴出ユニット32とを備えている。ユニット本体31は、フレーム11に固定されている。ユニット本体31は、複数の噴出ユニット32を支持する。
【0061】
複数の噴出ユニット32は、図1に示すように、電線5の移動方向Pに沿って並んで設けられ、図示例では12個設けられている。噴出ユニット32は、弛み吸収ユニット20の送出ロール13側に設けられており、弛み吸収ユニット20と送出ロール13との間に設けられている。即ち、噴出ユニット32は、弛み吸収ユニット20より電線5の移動方向Pの下流側に設けられ、送出ロール13より電線5の移動方向Pの上流側に設けられている。
【0062】
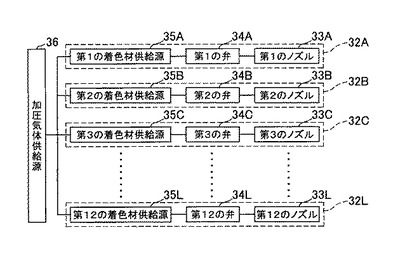
複数の噴出ユニット32は、互いに異なる色の着色材を電線5の外表面5aに向かって噴出する。これによって、より多くの着色パターンを有した電線5を製造することができる。しかしながら、これら噴出ユニット32は、必ずしも互いに異なる色の着色材を噴出しなくてもよい。複数の噴出ユニット32は互いに略同構造であるので、以下、一つの噴出ユニット32(以下、第1の噴出ユニット32Aという)を代表して説明する。
【0063】
第1の噴出ユニット32Aは、図3に示すように、第1のノズル33Aと、第1の弁34Aと、第1の着色材供給源35Aとを備えている。第1のノズル33Aは、電線5の外表面5aに相対している。第1のノズル33Aは、着色材を通すことのできる孔を備えている。孔は、電線5の外表面5aに向かって直線状に伸びている。孔内には、第1の着色材供給源35Aから着色材が供給される。第1の着色材供給源35Aは、色Aの着色材を収容している。前記孔の開口部は、電線5の外表面5aに相対しており、内側に着色材を通すことができる。
【0064】
第1の弁34Aは、第1のノズル33Aと第1の着色材供給源35Aとの間に設けられ、これらと連結している。また、第1の着色材供給源35Aには、さらに、加圧気体供給源36が連結している。加圧気体供給源36は、加圧された気体を第1の着色材供給源35A内に供給する。なお、この加圧気体供給源36は、他の噴出ユニット32(以下、第2〜第12の噴出ユニット32B〜32Lという)の着色材供給源35B〜35Lにも連結されており、加圧された気体を該着色材供給源35B〜35L内に供給する。
【0065】
第1の弁34Aが開くと、加圧気体供給源36から供給される加圧された気体によって、第1のノズル33Aの孔内の着色材が前述した開口部を通って電線5の外表面5aに向かって噴出される。また、第1の弁34Aが閉じると、第1のノズル33A内の着色材の噴出が止まる。
【0066】
前述した構成の第1の噴出ユニット32Aは、制御装置40の後述する第1の弁駆動回路47Aからの信号によって第1の弁34Aが予め定められている時間開いて、一定量の着色材を電線5の外表面5aに向かって噴出する。こうして、第1の噴出ユニット32Aは、一定量ずつ着色材を滴射する。なお、滴射とは、液状の着色材が、第1のノズル33Aから液滴の状態即ち滴の状態で電線5の外表面5aに向かって付勢されて打ち出されることを示している。
【0067】
前述した第1の噴出ユニット32Aと同様に、第2〜第12の噴出ユニット32B〜32Lも、それぞれ、後述の対応する第2〜第12の弁駆動回路47B〜47Lからの信号によって一定量の着色材を電線5の外表面5aに向かって噴出可能である。このように、第1〜第12の噴出ユニット32A〜32Lは、電線5の外表面5aに向かって着色材を噴出して、電線5の外表面5aを着色する。
【0068】
前述した着色材とは、色材(工業用有機物質)が溶媒に溶解、分散した液状物質である。色材としては、染料、顔料(大部分は有機物であり、合成品)があり、時には染料が顔料として、顔料が染料として用いられることがある。より具体的な例として、着色材とは、着色液または塗料である。
【0069】
着色液とは、溶媒中に染料が溶けているものまたは分散しているものを示しており、塗料とは、分散液中に顔料が分散しているものを示している。このため、着色液が電線5の外表面5aに付着すると染料が被覆部52内に染み込み、塗料が電線5の外表面5aに付着すると顔料が被覆部52内に染み込むことなく外表面5aに接着する。また、溶媒と分散液とは、被覆部52を構成する合成樹脂と親和性のあるものが望ましい。この場合、染料が被覆部52内に確実に染み込んだり、顔料が電線5の外表面5aに確実に接着したりすることとなる。
【0070】
即ち、噴出ユニット32は、電線5の外表面5aの一部を染料で染める、または、電線5の外表面5aに顔料を塗る。このため、電線5の外表面5aを着色するとは、電線5の外表面5aの一部を染料で染める(染色する)ことと、電線5の外表面5aの一部に顔料を塗ることとを示している。
【0071】
ダクト15は、図1に示すように、噴出ユニット32の送出ロール13側に設けられており、噴出ユニット32と送出ロール13との間に設けられている。即ち、ダクト15は、噴出ユニット32より電線5の移動方向Pの下流側に設けられ、送出ロール13より電線5の移動方向Pの上流側に設けられている。ダクト15は、筒状に形成されており、内側に電線5を通す。ダクト15には、真空ポンプ等の図示しない吸引手段が連結されている。吸引手段は、ダクト15内の気体を吸引して、着色材中の溶媒と分散液等が外部に流出することを防止する。
【0072】
エンコーダ16は、回転子16aを一対備えている。回転子16aは、送出ロール13より電線5の移動方向Pの下流側に設けられている。回転子16aは、軸心回りに回転自在である。回転子16aの外周面は、一対の送出ロール13間に挟まれた電線5の外表面5aと接触している。一対の回転子16aは、互いの間に電線5を挟んでいる。回転子16aは、矢印Pに沿って電線5が移動すると回転する。回転子16aの回転数と、矢印Pに沿った電線5の移動距離とは比例する。
【0073】
このエンコーダ16は、図4に示すように、制御装置40の後述するパルス計数回路42に接続されている。エンコーダ16は、回転子16aが所定角度ずつ回転すると、制御装置40に向かってパルス信号を出力する。即ち、エンコーダ16は、矢印Pに沿った電線5の移動距離を検出し、この移動距離に応じた情報をパルス計数回路42に向かって出力する。本実施形態においては、電線5は所定の長さに切断されるが、電線5の移動距離がこの所定の長さに達したときに出力されるパルス信号をB1とする。なお、通常、エンコーダは、電線5とエンコーダ取付ロール(回転子)の摩擦によって電線5の移動量に応じたパルス信号を出力する。しかし、電線5の外表面5aの状態により電線5の移動量とパルス数が必ずしも一致しない場合は、別の場所で移動距離情報を入手し、その情報をフィードバックし、比較演算してもよい。
【0074】
切断機構17は、図1に示すように、エンコーダ16の一対の回転子16aよりも電線5の移動方向Pの下流側に配されている。切断機構17は、一対の切断刃17aを備えている。一対の切断刃17aは、鉛直方向に沿って並べられている。一対の切断刃17aは、鉛直方向に沿って互いに近づいたり離れたりする。一対の切断刃17aは、互いに近づくと、一対の送出ロール13によって送り出された電線5を互いの間に挟んで切断する。一対の切断刃17aは、互いに離れると、勿論、電線5から離れる。
【0075】
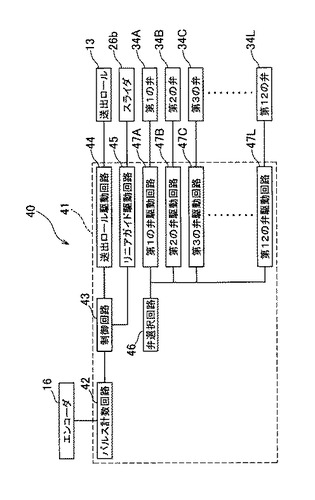
制御装置40は、図4に示すように、箱状の装置本体41と、パルス計数回路42と、制御手段としての制御回路43と、送出ロール駆動回路44と、リニアガイド駆動回路45と、弁選択回路46と、第1〜第12の弁駆動回路47A〜47L(図4には一部のみ示す)とを備えている。装置本体41は、パルス計数回路42と制御回路43と送出ロール駆動回路44とリニアガイド駆動回路45と弁選択回路46と弁駆動回路47A〜47L等を内部に収容している。
【0076】
パルス計数回路42は、前述したエンコーダ16から入力されるパルス信号をカウントする。パルス計数回路42は、制御回路43に接続されており、現在何番目のパルス信号がエンコーダ16から入力されたかを示す情報を制御回路43に向かって出力する。パルス計数回路42では、パルス分解能を上げるため、非常に高周波数のエンコーダ16で発生したパルス信号を分周してパルス計数回路42に入れる場合もある。
【0077】
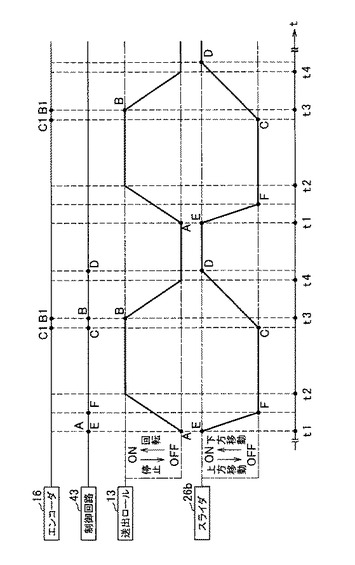
制御回路43は、送出ロール駆動回路44とリニアガイド駆動回路45とに接続されている。制御装置40は、送出ロール13の動作を制御する。制御回路43は、エンコーダ16からパルス信号が入力されると(即ち電線5の移動距離に応じて)、送出ロール駆動回路44に送出ロール13を回転させて電線5を移動させるか否かの判定を行い、所定のパターンにしたがって送出ロール13に電線5を断続的に移動させる。そして、図5に示すように、制御回路43は、送出ロール駆動回路44に対して送出開始信号Aと送出停止信号Bとを出力する。
【0078】
送出開始信号Aは、送出ロール駆動回路44に送出ロール13を回転させて電線5を移動させる。送出開始信号Aは、予め定められたタイミング(例えば、送出停止信号Bが出力された所定時間後)で出力される。送出停止信号Bは、送出ロール駆動回路44に送出ロール13の回転を停止させて電線5を停止させる。送出停止信号Bは、所定の長さの電線5を送出したと判定してエンコーダ16から前述したパルス信号B1が入力されると出力される。
【0079】
さらに、制御回路43は、リニアガイド26の動作を制御する。制御回路43は、エンコーダ16からパルス信号が入力された際(即ち電線5の移動距離に応じて)、リニアガイド駆動回路45にスライダ26bを移動させてローラ部材27に電線5を押圧させるか否かの判定を行う。そして、制御回路43は、図5に示すように、リニアガイド駆動回路45に対して接近開始信号Cと接近停止信号Dと離間開始信号Eと離間停止信号Fとを出力する。
【0080】
接近開始信号Cは、リニアガイド駆動回路45にスライダ26bを鉛直方向に沿って下方に移動させて、ローラ部材27に電線5を押圧させる。接近開始信号Cは、予め定められた順番のパルス信号C1が入力されると出力される。このパルス信号C1は、電線5が前述した所定の長さを移動する際に出力されるパルス信号のうち、前述したパルス信号B1よりも先の順番のものとされている。これによって接近開始信号Cは、送出停止信号Bよりも先に出力され、電線5が停止し始める時間t3よりも前に出力される。
【0081】
接近停止信号Dは、リニアガイド駆動回路45にスライダ26bが鉛直方向に沿って下方に移動するのを停止させる。接近停止信号Dは、エンコーダ16等によって判定される電線5の停止する時間t4より後に出力される。即ち、接近停止信号Dは、送出停止信号Bよりも後に出力されるとともに、電線5が停止した後に出力される。
【0082】
離間開始信号Eは、リニアガイド駆動回路45にリニアガイド26のスライダ26bを鉛直方向に沿って上方に移動させて、ローラ部材27を電線5から遠ざける。離間開始信号Eは、送出開始信号Aと同時に出力される。なお、離間開始信号Eは、送出開始信号Aよりも後に出力されてもよい。
【0083】
離間停止信号Fは、リニアガイド駆動回路45にスライダ26bが鉛直方向に沿って上方に移動するのを停止させる。離間停止信号Fは、離間開始信号E(送出開始信号A)が出力されてから所定時間後に出力され、例えば、タイマーによって前述した所定時間後に出力される。本実施形態においては、この所定時間は、電線5が一定速度で動き出す時間t2より前までとされているが、時間t2の後まででもよい。
【0084】
前述した構成の制御回路43は、電線5の停止時前後において、接近開始信号C、送出停止信号B、接近停止信号Dの順にこれら信号C、B、Dを出力する。そして、制御回路43は、電線5が停止し始める時間t3より前から該電線5が停止する時間t4より後までローラ部材27に電線5を押圧させる。こうして、制御回路43は、エンコーダ16の検出した電線5の移動距離に応じて送出停止信号Bを出力して送出ロール13に電線5を停止させる直前から一定時間後まで、ローラ部材27に電線5を押圧させる。特許請求の範囲の請求項1及び請求項8に記載した「一定時間後」とは、電線5の停止する時間t4よりも後までを意味している。
【0085】
また、前述した構成の制御回路43は、電線5の移動開始時前後において、送出開始信号Aと離間開始信号E、離間停止信号Fの順にこれら信号A、E、Fを出力する。制御回路43は、電線5の停止時にはローラ部材27に電線5を押圧させている。そして、制御回路43は、電線5が移動し始める時間t1より前から該電線5が移動を開始した後までローラ部材27に電線5を押圧させる。こうして、制御回路43は、エンコーダ16の検出した電線5の移動距離に応じて送出開始信号Aを出力して送出ロール13に電線5を移動させる直前から一定時間後まで、ローラ部材27に電線5を押圧させる。特許請求の範囲の請求項2及び請求項9に記載した「一定時間後」とは、電線5が移動し始める時間t1よりも後までを意味している。
【0086】
送出ロール駆動回路44は、図4に示すように、図示しないインターフェースを介して送出ロール13と接続されている。送出ロール駆動回路44は、制御回路43から送出開始信号Aや送出停止信号Bが入力されると、送出ロール13に向かってこれら信号A、Bを出力して、送出ロール13を回転させたり停止させたりする。
【0087】
リニアガイド駆動回路45は、図示しないインターフェースを介して駆動部29と接続されている。リニアガイド駆動回路45は、制御回路43から接近開始信号Cや接近停止信号Dが入力されると、駆動部29に向かってこれら信号C、Dを出力して、スライダ26bを電線5に近づくように移動させたりこの移動を停止させたりする。また、リニアガイド駆動回路45は、制御回路43から離間開始信号Eや離間停止信号Fが入力されると、駆動部29に向かってこれら信号E、Fを出力して、スライダ26bを電線5から遠ざかるように移動させたりこの移動を停止させたりする。
【0088】
弁選択回路46と第1〜第12の弁駆動回路47A〜47Lとは、前述した噴出ユニット32A〜32Lを制御する。弁選択回路46は、パルス計数回路42に接続されているとともに、各弁駆動回路47A〜47Lに接続されている。弁選択回路46は、予め定められた順番のパルス信号が入力された際に、各弁駆動回路47A〜47Lに各弁34A〜34Lを開かせる信号を出力する。弁選択回路46は、電線5の外表面5aに形成する印6のパターンに応じて、各弁駆動回路47A〜47Lに各弁34A〜34Lを開かせる信号を出力する。
【0089】
即ち、弁選択回路46は、エンコーダ16から入力されたパルス信号毎に各弁34A〜34Lのうちいずれかを開くか、またはいずれとも閉じたままとするかを記憶しており、この記憶したパターンに従って各弁駆動回路47A〜47Lを制御する。ただし、パルス計数回路42と弁駆動回路47A〜47Lとが直接繋がる場合は、弁選択回路46を省略することができる。
【0090】
このように、弁選択回路46は、電線5の外表面5aを着色するパターンを予め記憶している。また、弁選択回路46は、エンコーダ16から入力される電線5の移動距離に応じて、記憶したパターン通りに、各噴出ユニット32A〜32Lに一定量ずつ着色材を電線5の外表面5aに向かって噴出させることができる。
【0091】
第1〜第12の弁駆動回路47A〜47Lは、第1〜第12の噴出ユニット32A〜32Lと同数設けられており、それぞれ各噴出ユニット32A〜32Lに対応している。弁駆動回路47A〜47Lは、図示しないインターフェースを介して対応する噴出ユニット32A〜32Lの弁34A〜34Lと接続されている。弁駆動回路47A〜47Lは、弁選択回路46から対応する弁34A〜34Lを開く信号が入力されると、該信号を弁34A〜34Lに向かって出力する。弁駆動回路47A〜47Lが対応する弁34A〜34Lを開く信号を弁34A〜34Lに向かって出力すると、対応する弁34A〜34Lが開く。こうして、弁駆動回路47A〜47Lは、前述した信号を対応する弁34A〜34Lに向かって出力することで、対応する弁34A〜34Lの開閉を制御する。
【0092】
前述した構成の弛み吸収装置1で、長尺の電線5の外表面5aを着色して該電線5を所定の長さに切断し、該電線5をその長手方向に沿って断続的に移動させる際の電線5の弛みを吸収するには、まず、ガイドロール12をフレーム11に取り付ける。一対の切断刃17aを互いに離しておき、ガイドロール12に巻かれた電線5を矯正ユニット14と弛み吸収ユニット20と着色ユニット30とダクト15とに順に通して、一対の送出ロール13間に挟む。そして、所定箇所に噴出ユニット32A〜32Lのノズル33A〜33Lを取り付け、各ノズル33A〜33Lに対応する着色材供給源35A〜35Lを連結する。さらに加圧気体供給源36を着色材供給源35A〜35Lに連結し、吸引手段でダクト15内の気体を吸引する。
【0093】
そして、送出ロール13を回転駆動して、電線5をガイドロール12から引っ張って該電線5の長手方向に沿って移動させるとともに、矯正ユニット14により電線5に第1の付勢力Q1の摩擦力を付与して、該電線5を張っておく。そして、エアシリンダ25でローラ部材27を電線5に向かって第2の付勢力Q2で付勢しておく。
【0094】
そして、エンコーダ16から予め定められた順番のパルス信号がパルス計数回路42に入力されると、所定のパターンに応じて、弁駆動回路47A〜47Lのいずれかが対応する弁34A〜34Lを所定時間、所定回数開く。すると、噴出ユニット32A〜32Lのいずれかは、着色材を一定量ずつ移動中の電線5の外表面5aに向かって噴出(滴射)する。例えば、弁駆動回路47Aが該弁34Aを所定時間、1回開くと、電線5の外表面5aには図7に示す印6が形成される。
【0095】
そして、電線5の外表面5aに付着した着色材から前述した溶媒または分散液が蒸発して、電線5の外表面5aを染料で染めるまたは外表面5aに顔料を塗る。電線5の外表面5aに付着した着色材から蒸発した溶媒または分散液は、ダクト15内から吸引手段に吸引される。こうして、電線5の外表面5aが着色される。なお、本実施形態においては移動中の電線5の外表面5aを着色しているが、停止した状態の電線5の外表面5aを着色してもよい。
【0096】
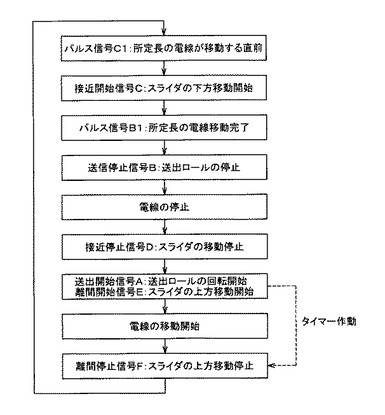
制御装置40の制御回路43は、図6に示すように、電線5の移動距離が所定の長さに達する直前にエンコーダ16からパルス信号C1が出力されると、接近開始信号Cを出力してスライダ26b即ちローラ部材27を鉛直方向に沿って下方に移動させて電線5を押圧させ、次いで送出停止信号Bを出力して送出ロール13即ち電線5を停止させ、最後に接近停止信号Dを出力してスライダ26b即ちローラ部材27の下方への移動を停止させる。ローラ部材27は、電線5が停止する直前から停止した後まで電線5を押圧して、電線5の弛みを吸収する。
【0097】
さらに、電線5が停止するとエアシリンダ25の伸縮ロッド25bが伸長して第2の付勢力Q2でローラ部材27を常に電線5に向かって付勢し、電線5に一定のテンションを付与する。こうして、電線5の停止時前後の電線5の弛みが吸収される。その後、一対の切断刃17aが互いに近づいて、これら切断刃17a間に電線5を挟んで切断する。
【0098】
電線5が停止しているとき、スライダ26bが下方に位置付けられかつ伸縮ロッド25bが伸長して、ローラ部材27は電線5の弛みを吸収しかつ電線5に一定のテンションを付与している。この停止した電線5を再び移動させる際には、制御回路43は、まず、送出開始信号Aを出力して送出ロール13を回転させ始めるとともに、離間開始信号Eを出力してスライダ26b即ちローラ部材27を鉛直方向に沿って上方に移動させて電線5から遠ざける(このときも、ローラ部材27は電線5を押圧している)。こうして、電線5が移動する直前から移動を開始した直後の電線5の弛みが吸収される。その後、制御回路43は、離間停止信号Fを出力してスライダ26b即ちローラ部材27の上方への移動を停止させて、スライダ26bを初期位置へ戻してローラ部材27の電線5の押圧を解除する。
【0099】
本実施形態によれば、電線5を該電線5の長手方向に沿って移動させる送出ロール13と、所定のパターンにしたがって送出ロール13に電線5を断続的に移動させる制御回路43と、電線5の移動距離を検出するエンコーダ16と、電線5の移動方向Pに交差する方向に沿って電線5を押圧する押圧部24とを備えるとともに、制御回路43が、エンコーダ16の検出した電線5の移動距離に応じて送出ロール13に電線5を停止させる直前から一定時間後まで押圧部24に電線5を押圧させるので、押圧部24が電線5の停止時に電線5の弛み始める前から電線5の停止した後まで電線5を押圧することで、電線5の停止時前後における電線5の弛みを確実に防止することができる。
【0100】
制御回路43が、エンコーダ16の検出した電線5の移動距離に応じて送出ロール13に電線5を停止させた後に再び電線5を移動させる直前から一定時間後まで押圧部24に電線5を押圧させるので、押圧部24が電線5の移動開始時に電線5の弛み始める前から電線5の移動後まで電線5を押圧することで、電線5の移動開始時前後における電線5の弛みを確実に防止することができる。
【0101】
押圧部24が、その外周面が電線5と接触して回転自在に設けられかつ制御回路43からの命令によって電線5を押圧するローラ部材27を備えているので、電線5を押圧する際にローラ部材27が回転することで電線5とローラ部材27との摩擦力が緩和され、電線5との接触部分の部品の消耗を軽減することができる。
【0102】
ローラ部材27の回転を停止させるブレーキ部を備えているので、自らの慣性や電線5の慣性によるローラ部材27の回転を停止させ、この停止させた状態のローラ部材27で電線5の停止時や移動開始時に電線5を押圧することで、電線5を確実に押圧することができる。
【0103】
ローラ部材27を常に電線5に向かって付勢するエアシリンダ25を備えているので、電線5に常に一定のテンションが付与されて、電線5の弛みを更に確実に防止することができるとともに、特に移動中の電線5の弛みを防止することができる。
【0104】
電線5の外表面5aを着色する着色ユニット30を備えているので、弛みのない状態の電線5の外表面5aを着色することができ、電線5を予め定められたパターンに確実に着色して電線5同士の識別を確実に行うことができる。
【0105】
電線5を切断(加工)する切断機構17を備えているので、電線5を切断(加工)する際に電線5が弛むことがなく、電線5の切断を確実に行うことができる。
【0106】
本実施形態においては、ローラ部材27を常に電線5に向かって付勢するエアシリンダ25が設けられていたが、エアシリンダ25がなくても電線5の弛みを防止することができる。また、本実施形態においてはローラ部材27の回転を停止させるブレーキ部が設けられていたが、ブレーキ部がなくても電線5の弛みを防止することができる。しかしながら、より確実に電線5の弛みを防止するためには、エアシリンダ25やブレーキ部があると好ましい。
【0107】
なお、前述した実施形態は本発明の代表的な形態を示したに過ぎず、本発明は、実施形態に限定されるものではない。即ち、本発明の骨子を逸脱しない範囲で種々変形して実施することができる。
【図面の簡単な説明】
【0108】
【図1】本発明の一実施形態にかかる電線の弛み吸収装置の構成を示す説明図である。
【図2】図1に示された弛み吸収ユニットを拡大して示す説明図である。
【図3】図1に示された着色ユニットの噴出ユニットの構成を示す説明図である。
【図4】図1に示された制御装置の構成を示す説明図である。
【図5】図4に示された制御回路によって制御される送出ロールとスライダの動作を示すタイミングチャートである。
【図6】図4に示された制御回路によって制御される送出ロールとスライダの動作を示すフローチャートである。
【図7】図1に示された電線が着色された状態を示す上面(一部断面)図である。
【符号の説明】
【0109】
1 電線の弛み吸収装置
5 電線
13 送出ロール(移動手段)
16 エンコーダ(検出手段)
17 切断機構(加工手段)
24 押圧部(押圧手段)
25 エアシリンダ(付勢手段)
27 ローラ部材
30 着色ユニット(着色手段)
43 制御回路(制御手段)
【技術分野】
【0001】
本発明は、一方向に沿って断続的に移動する電線の弛みを吸収する電線の弛み吸収装置及び電線の弛み吸収方法に関する。
【背景技術】
【0002】
移動体としての自動車等には、種々の電子機器が搭載される。このため、前記自動車等は、前記電子機器に電源等からの電力やコンピュータ等からの制御信号等を伝えるために、ワイヤハーネスを配索している。ワイヤハーネスは、複数の電線と、該電線の端部等に取り付けられたコネクタ等を備えている。
【0003】
電線は、導電性の芯線と、該芯線を被覆する絶縁性の合成樹脂からなる被覆部とを備えている。電線は、所謂被覆電線である。コネクタは、端子金具と、該端子金具を収容するコネクタハウジングとを備えている。端子金具は、導電性の板金等からなり、電線の端部に取り付けられてこの電線の芯線と電気的に接続する。コネクタハウジングは、絶縁性の合成樹脂からなり箱状に形成されている。ワイヤハーネスは、コネクタハウジングが前述した電子機器等と結合することにより、端子金具を介して各電線が前述した電子機器と電気的に接続して、前述した電子機器に所要の電力や信号を伝える。
【0004】
前述したワイヤハーネスの電線は、芯線の大きさ、被覆部の材質(耐熱性の有無等)や使用目的等を識別する必要がある。使用目的とは、例えば、エアバックやABS(Antilock Brake System)等の制御信号や、動力伝達系統等の電線が用いられる自動車の系統(システム)である。そこで、ワイヤハーネスに用いられる電線は、前述した使用目的(系統)等を識別するために、外表面が所望の色に着色されている。
【0005】
前記ワイヤハーネスを組み立てる際には、まずローラに巻き取られた長尺の電線の外表面を所望の色に着色しかつ該電線を所定の長さに切断した後、該電線の端部等の被覆部を除去(皮むき)して端子金具を取り付ける。必要に応じて電線同士を接続する。その後、端子金具をコネクタハウジング内に挿入する。こうして、前述したワイヤハーネスを組み立てる。
【0006】
前述したように長尺の電線の外表面を着色して該電線を所定の長さに切断する際には、電線切断装置が用いられている(例えば、特許文献1参照)。この電線切断装置は、装置本体としてのフレームと、ガイドロールと、送出ロールと、切断機構とを少なくとも備えている。電線切断装置には、着色装置が取り付けられている。
【0007】
ガイドロールは、フレームの一端部に回転自在に支持され、切断前の長尺の電線を巻き付けている。送出ロールは、フレームの他端部に回転自在に支持されて、一対設けられている。一対の送出ロールは、互いの間に電線を挟み込んで、電線の長手方向に沿って電線を引っ張って該電線を移動させる。切断機構は、送出ロールよりも電線の移動方向の下流側に配されている。着色装置は、ガイドロールと送出ロールとの間に配されている。
【0008】
前述した構成の電線切断装置は、一対の送出ロールが断続的に回転することで電線を所定の長さずつ断続的に移動させる。電線が移動している間に、着色装置によって電線の外表面が着色される。そして、電線が停止すると、切断機構によって電線が切断される。
【0009】
このように電線が断続的に移動すると、電線が停止する時及び停止した電線が再び移動する時に、電線の慣性によって電線に弛みが生じる。このような電線の弛みを吸収するために、電線切断装置には弛み吸収装置が取り付けられている。弛み吸収装置は、ガイドロールと着色装置との間に設けられている。弛み吸収装置は、一対の案内ローラ支持フレームと、一対の案内ローラと、移動ローラ支持フレームと、移動ローラと、エアシリンダとを備えている。
【0010】
一対の案内ローラ支持フレームは、フレームに固定され、それぞれ案内ローラを回転自在に支持する。一対の案内ローラは電線の下方に配されている。移動ローラ支持フレームは、フレームに固定され、移動ローラを回転自在に支持する。移動ローラは、電線の上方に配され、電線の移動方向に沿って一対の案内ローラの間に配されている。エアシリンダは、シリンダ本体と、シリンダ本体から伸縮自在な伸縮ロッドとを備えている。シリンダ本体は、移動ローラ支持フレームに固定され、電線の上方に配されている。伸縮ロッドは、シリンダ本体から下方(即ち、電線に近づく方向)に向かって伸縮する。伸縮ロッドには、移動ローラが取り付けられている。
【0011】
一対の送出ロールが停止すると、電線の慣性によって特に一対の案内ローラ間の電線に弛みが生じる。すると、前述した構成の弛み吸収装置は、エアシリンダの伸縮ロッドを伸長させて移動ローラを下方に変位させ、電線を電線の移動方向に直交する方向に沿って付勢することで弛みを吸収する。
【特許文献1】特開2004−134371号公報
【発明の開示】
【発明が解決しようとする課題】
【0012】
しかしながら、前述した構成の弛み吸収装置では、送出ロールが停止した後にエアシリンダの伸縮ロッドが伸長して移動ローラが下方に変位するので、電線に一旦弛みが生じて電線があばれてしまう。そして、このように弛んであばれている電線の外表面を着色すると、着色パターンが乱れてしまい、予め定められた着色パターンと異なったものになって電線同士の識別が困難になるといった問題があった。
【0013】
本発明は、このような問題を解決することを目的としている。即ち、本発明は、電線の弛みを確実に吸収することができる電線の弛み吸収装置及び電線の弛み吸収方法を提供することを目的としている。
【課題を解決するための手段】
【0014】
前記課題を解決し目的を達成するために、請求項1に記載された発明は、一方向に沿って断続的に移動する電線の弛みを吸収する電線の弛み吸収装置において、前記電線を該電線の長手方向に沿って移動させる移動手段と、所定のパターンにしたがって前記移動手段に前記電線を断続的に移動させる制御手段と、前記電線の移動距離を検出する検出手段と、前記電線の移動方向に交差する方向に沿って前記電線を押圧する押圧手段と、を備えるとともに、前記制御手段が、前記検出手段の検出した前記電線の移動距離に応じて前記移動手段に前記電線を停止させる直前から一定時間後まで、前記押圧手段に前記電線を押圧させることを特徴とした電線の弛み吸収装置である。
【0015】
請求項2に記載された発明は、一方向に沿って断続的に移動する電線の弛みを吸収する電線の弛み吸収装置において、前記電線を該電線の長手方向に沿って移動させる移動手段と、所定のパターンにしたがって前記移動手段に前記電線を断続的に移動させる制御手段と、前記電線の移動距離を検出する検出手段と、前記電線の移動方向に交差する方向に沿って前記電線を押圧する押圧手段と、を備えるとともに、前記制御手段が、前記検出手段の検出した前記電線の移動距離に応じて前記移動手段に前記電線を停止させた後に再び前記電線を移動させる直前から一定時間後まで、前記押圧手段に前記電線を押圧させることを特徴とした電線の弛み吸収装置である。
【0016】
請求項3に記載された発明は、請求項1に記載された電線の弛み吸収装置において、前記制御手段が、前記検出手段の検出した前記電線の移動距離に応じて前記移動手段に前記電線を停止させた後に再び前記電線を移動させる直前から一定時間後まで、前記押圧手段に前記電線を押圧させることを特徴とした電線の弛み吸収装置である。
【0017】
請求項4に記載された発明は、請求項1ないし請求項3のうちいずれか一項に記載された電線の弛み吸収装置において、前記押圧手段が、その外周面が前記電線と接触して回転自在に設けられ、かつ、前記制御手段からの命令によって前記電線を押圧するローラ部材を備えたことを特徴とした電線の弛み吸収装置である。
【0018】
請求項5に記載された発明は、請求項4に記載された電線の弛み吸収装置において、前記ローラ部材の回転を停止させるブレーキ部を備えたことを特徴とした電線の弛み吸収装置である。
【0019】
請求項6に記載された発明は、請求項4または請求項5に記載された電線の弛み吸収装置において、前記ローラ部材を常に前記電線に向かって付勢する付勢手段を備えたことを特徴とした電線の弛み吸収装置である。
【0020】
請求項7に記載された発明は、請求項1ないし請求項6のうちいずれか一項に記載された電線の弛み吸収装置において、前記電線の外表面を着色する着色手段を備えたことを特徴とした電線の弛み吸収装置である。
【0021】
請求項8に記載された発明は、一方向に沿って断続的に移動する電線の弛みを吸収する電線の弛み吸収方法において、前記電線の移動距離に応じて前記電線を停止させる直前から一定時間後まで、前記電線を該電線の移動方向に交差する方向に沿って押圧することを特徴とした電線の弛み吸収方法である。
【0022】
請求項9に記載された発明は、一方向に沿って断続的に移動する電線の弛みを吸収する電線の弛み吸収方法において、前記電線の移動距離に応じて前記電線を停止させた後に再び前記電線を移動させる直前から一定時間後まで、前記電線を該電線の移動方向に交差する方向に沿って押圧することを特徴とした電線の弛み吸収方法である。
【発明の効果】
【0023】
請求項1に記載された発明によれば、制御手段が、電線が停止する直前から一定時間後まで押圧手段に電線を押圧させるので、押圧手段が電線の停止時に電線の弛み始める前から電線の停止した後まで電線を押圧することで、電線の停止時前後における電線の弛みを確実に防止することができる。
【0024】
請求項2に記載された発明によれば、制御手段が、電線が停止した後に再び移動する直前から一定時間後まで押圧手段に電線を押圧させるので、押圧手段が電線の移動開始時に電線の弛み始める前から電線の移動後まで電線を押圧することで、電線の移動開始時前後における電線の弛みを確実に防止することができる。
【0025】
請求項3に記載された発明によれば、制御手段が、電線が停止する直前から一定時間後まで押圧手段に電線を押圧させるとともに、電線が停止した後に再び移動する直前から一定時間後まで押圧手段に電線を押圧させるので、電線の停止時と移動開始時との双方における電線の弛みを確実に防止することができる。
【0026】
請求項4に記載された発明によれば、押圧手段が、その外周面が電線と接触して回転自在に設けられかつ制御手段からの命令によって電線を押圧するローラ部材を備えているので、電線を押圧する際にローラ部材が回転することで電線とローラ部材との摩擦力が緩和され、電線との接触部分の部品の消耗を軽減することができる。
【0027】
請求項5に記載された発明によれば、ローラ部材の回転を停止させるブレーキ部を備えているので、自らの慣性や電線の慣性によるローラ部材の回転を停止させ、この停止させた状態のローラ部材で電線の停止時や移動開始時に電線を押圧することで、電線を確実に押圧することができる。
【0028】
請求項6に記載された発明によれば、ローラ部材を常に電線に向かって付勢する付勢手段を備えているので、電線に常に一定のテンションが付与されて、電線の弛みを更に確実に防止することができるとともに、移動中の電線の弛みを防止することができる。
【0029】
請求項7に記載された発明によれば、電線の外表面を着色する着色手段を備えているので、弛みのない状態の電線の外表面を着色することができ、電線を予め定められたパターンに確実に着色して電線同士の識別を確実に行うことができる。
【0030】
請求項8に記載された発明によれば、電線の移動距離に応じて電線を停止させる直前から一定時間後まで、電線を該電線の移動方向に交差する方向に沿って押圧するので、電線の停止時における電線の弛みを確実に防止することができる。
【0031】
請求項9に記載された発明によれば、電線の移動距離に応じて電線を停止させた後に再び電線を移動させる直前から一定時間後まで、電線を該電線の移動方向に交差する方向に沿って押圧するので、電線の移動開始時における電線の弛みを確実に防止することができる。
【発明を実施するための最良の形態】
【0032】
以下、本発明の一実施形態にかかる電線の弛み吸収装置(以下、単に弛み吸収装置という)を図1ないし図7を参照して説明する。本発明の一実施形態にかかる弛み吸収装置1は、例えば長尺の電線5の外表面5aを着色して該電線5を所定の長さに切断するとき、該電線5をその長手方向に沿って断続的に移動させる際の電線5の弛みを吸収する装置である。
【0033】
電線5は、図7に示すように、導電性の芯線51と、絶縁性の被覆部52とを備えている。芯線51は、複数の素線51aが撚られて形成されている。芯線51を構成する素線51aは、導電性の金属からなる。また、芯線51は、一本の素線から構成されていてもよい。被覆部52は、例えば、ポリ塩化ビニル等の合成樹脂からなる。被覆部52は、芯線51を被覆している。このため、被覆部52の外表面は、電線5の外表面5aをなしている。
【0034】
このような被覆部52は、単色Nとされている(図7中、白抜きで示す)。なお、被覆部52を構成する合成樹脂に所望の着色剤を混入することで電線5の外表面5aを単色Nにしてもよく、また、被覆部52を構成する合成樹脂に着色剤を混入することなく単色Nを合成樹脂自体の色としてもよい。後者のように単色Nが合成樹脂自体の色である場合、被覆部52即ち電線5の外表面5aは、無着色であるという。このように、無着色とは、被覆部52を構成する合成樹脂に着色剤を混入せずに、電線5の外表面5aが合成樹脂自体の色であることを示している。
【0035】
電線5の外表面5aが着色されると、電線5の外表面5aには、例えば、図7に示すような印6が形成される。印6の色は、色A(図7中、平行斜線で示す)である。色Aは、単色Nとは異なる。印6は、予め定められたパターンにしたがって、その形状や配置(電線5上の位置)等が決定される。
【0036】
前述した構成の電線5は、後述する切断機構17によって所定の長さで切断された後、複数束ねられるとともに端部等にコネクタ等が取り付けられて、ワイヤハーネスを構成する。そして、コネクタが自動車等の各種の電子機器のコネクタにコネクタ結合して、ワイヤハーネス即ち電線5は、各電子機器に各種の信号や電力を伝える。
【0037】
前述した印6の色Aを種々の色に変更することにより、電線5同士を識別可能としている。印6の色は、ワイヤハーネスの電線5の線種、系統(システム)の識別等を行う際の目印となる。即ち、前述した電線5の印6の色は、ワイヤハーネスの各電線5の使用目的を識別するために用いられる。
【0038】
弛み吸収装置1は、図1に示すように、装置本体としてのフレーム11と、ガイドロール12と、移動手段としての送出ロール13と、張力付与手段としての矯正ユニット14と、弛み吸収ユニット20と、着色手段としての着色ユニット30と、ダクト15と、検出手段としてのエンコーダ16と、加工手段としての切断機構17と、制御装置40とを備えている。
【0039】
フレーム11は、工場等のフロア上等に設置される。フレーム11は、水平方向に伸びている。ガイドロール12は、フレーム11の一端部に回転自在に取り付けられている。ガイドロール12は、長尺でかつ印6が形成されていない電線5を巻いている。ガイドロール12は、矯正ユニット14と弛み吸収ユニット20と着色ユニット30とダクト15とエンコーダ16と切断機構17とに順に、電線5を送り出す。
【0040】
送出ロール13は、フレーム11の他端部に一対設けられている。一対の送出ロール13は、フレーム11に回転自在に支持されかつ鉛直方向に沿って並べられている。送出ロール13は、図示しないモータ等の駆動源により、互いに逆方向に同回転数で回転される。一対の送出ロール13は、互いの間に電線5を挟み、かつこの電線5の長手方向に沿って該電線5をガイドロール12から引っ張る。
【0041】
前述した構成の送出ロール13は、電線5の長手方向に沿って電線5を移動させることで、電線5と後述する噴出ユニット32とを電線5の長手方向に沿って相対的に移動させる。さらに、送出ロール13は、制御装置40に接続されて該制御装置40からの命令によって回転及び停止を繰り返すことで、電線5の長手方向に沿って電線5を断続的に移動させる。電線5は、ガイドロール12から送出ロール13に向かって図1中の矢印P方向に沿って移動する。矢印Pは、電線5の移動方向Pをなしている。
【0042】
矯正ユニット14は、ガイドロール12の送出ロール13側に設けられ、ガイドロール12と送出ロール13との間に設けられている。即ち、矯正ユニット14は、ガイドロール12より電線5の移動方向Pの下流側に設けられ、送出ロール13より電線5の移動方向Pの上流側に設けられている。矯正ユニット14は、板状のユニット本体14aと、複数の第1ローラ14bと、複数の第2ローラ14cとを備えている。ユニット本体14aは、フレーム11に固定されている。
【0043】
第1ローラ14bと第2ローラ14cとは、それぞれ、ユニット本体14aに回転自在に支持されている。複数の第1ローラ14bは、電線5の移動方向Pに沿って並べられ、電線5の上方に配されている。複数の第2ローラ14cは、電線5の移動方向Pに沿って並べられ、電線5の下方に配されている。第1ローラ14bと第2ローラ14cとは、千鳥状に配されている。
【0044】
前述した構成の矯正ユニット14は、送出ロール13によってガイドロール12から送り出される電線5を第1ローラ14bと第2ローラ14cとの間に挟む。そして、矯正ユニット14は、電線5を直線状にする。また、矯正ユニット14は、第1ローラ14bと第2ローラ14cとの間に電線5を挟むことで、該電線5に摩擦力を付与する。即ち、矯正ユニット14は、送出ロール13が電線5を引っ張る方向(電線5の移動方向P)と逆方向の第1の付勢力Q1の摩擦力を電線5に付与する。この第1の付勢力Q1は、送出ロール13が電線5を引っ張る力よりも弱い。このため、矯正ユニット14は、電線5にその長手方向に沿った張力を付与して、該電線5を張る。
【0045】
弛み吸収ユニット20は、矢印Pに沿って断続的に移動する電線5の弛みを吸収する。弛み吸収ユニット20は、矯正ユニット14の送出ロール13側に設けられ、矯正ユニット14と送出ロール13との間に設けられている。即ち、弛み吸収ユニット20は、矯正ユニット14より電線5の移動方向Pの下流側に設けられ、送出ロール13より電線5の移動方向Pの上流側に設けられている。
【0046】
弛み吸収ユニット20は、図2に示すように、一対の案内ローラ支持フレーム21と、一対の案内ローラ22と、押圧部支持フレーム23と、押圧手段としての押圧部24とを備えている。
【0047】
案内ローラ支持フレーム21は、フレーム11に固定されている。案内ローラ支持フレーム21は、フレーム11から上方に立設している。一対の案内ローラ支持フレーム21は、電線5の移動方向Pに沿って、互いに間隔をあけて並べられている。
【0048】
一対の案内ローラ22は、それぞれ、案内ローラ支持フレーム21に回転自在に支持されている。案内ローラ22は、電線5の下方に配され、その外周面が電線5と接触することで電線5の移動方向Pから電線5が脱落しないように電線5を案内する。このため、案内ローラ22は、電線5の移動方向Pを案内する。
【0049】
押圧部支持フレーム23は、フレーム11に固定されている。押圧部支持フレーム23は、フレーム11から上方に立設している。押圧部支持フレーム23は、一対の案内ローラ支持フレーム21の近傍に設けられている。
【0050】
押圧部24は、リニアガイド26と、駆動部29と、ローラ部材27と、図示しないブレーキ部とを備えている。リニアガイド26は、押圧部支持フレーム23に取り付けられている。リニアガイド26は、レール26aと、スライダ26bとを備えている。レール26aは、押圧部支持フレーム23の外表面に固定されている。レール26aは、直線状に形成され、鉛直方向に沿って設けられている。スライダ26bは、レール26aに該レール26aの長手方向に沿って移動自在に支持されている。スライダ26bには、付勢手段としてのエアシリンダ25が取り付けられている。
【0051】
エアシリンダ25は、シリンダ本体25aと、このシリンダ本体25aから伸縮自在な伸縮ロッド25bとを備えている。シリンダ本体25aは、スライダ26bに固定され、電線5の上方に配されている。伸縮ロッド25bは、シリンダ本体25aから鉛直方向に沿って下方に伸長する。即ち、伸縮ロッド25bは、シリンダ本体25aから電線5に近づく方向に伸長する。
【0052】
前述した構成のエアシリンダ25の伸縮ロッド25bには、ローラ部材27が取り付けられている。エアシリンダ25は、シリンダ本体25a内に加圧された気体が供給されることで、伸縮ロッド25b即ちローラ部材27を第2の付勢力Q2で鉛直方向に沿って下方に常に付勢する。このように、エアシリンダ25は、ローラ部材27を電線5に向かって第2の付勢力Q2で常に付勢する。第2の付勢力Q2は、第1の付勢力Q1より弱い。
【0053】
駆動部29は、駆動源としてのモータ29aと、ねじ軸29bと、ナット29cとを備えている。モータ29aは、押圧部支持フレーム23に固定されている。ねじ軸29bは、鉛直方向に沿って配されている。ねじ軸29bの一端部はモータ29aの出力軸と連結され、ねじ軸29bの他端部は押圧部支持フレーム23に固定された軸受け29dに支持されている。このように、ねじ軸29bは、押圧部支持フレーム23に軸心回りに回転自在に支持されている。ナット29cは、ねじ軸29bに螺合するとともに、スライダ26bに固定されている。
【0054】
前述した構成の駆動部29のモータ29aが作動すると、モータ29aの出力軸が回転してねじ軸29bが回転し、ナット29cが鉛直方向に沿って移動して、スライダ26bがレール26aの長手方向即ち鉛直方向に沿って移動する。スライダ26bが鉛直方向に沿って移動すると、スライダ26bに固定されたエアシリンダ25が鉛直方向に沿って移動し、エアシリンダ25の伸縮ロッド25bに取り付けられたローラ部材27が鉛直方向に沿って移動する。このように、駆動部29は、ローラ部材27を鉛直方向に沿って移動させる。
【0055】
ローラ部材27は、エアシリンダ25の伸縮ロッド25bに回転自在に支持されているとともに、エアシリンダ25及びリニアガイド26によって鉛直方向に沿って移動自在に支持されている。ローラ部材27は、電線5の上方に配され、一対の案内ローラ22間の中央に配されている。ローラ部材27は、鉛直方向に沿って移動自在に支持されることで、電線5の移動方向Pに直交(交差)する方向に沿って移動自在に支持されている。ローラ部材27は、制御回路43からの命令によって駆動部29がスライダ26bを鉛直方向に沿って下方に移動させると電線5を押圧し、その外周面が電線5の外表面5aと接触して回転自在に設けられている。
【0056】
ブレーキ部は、ローラ部材27の前述した回転を停止させるものであり、例えば、周知のパウダーブレーキや摩擦板ブレーキ等である。ブレーキ部は、例えば電線5の停止時や移動開始時に制御回路43からの命令によって作動してローラ部材27の回転を停止させて、ローラ部材27にさらに確実に電線5を押圧させる。ブレーキ部は、ローラ部材27の回転を停止させるものであれば、その機構が機械的なものでも電磁的なものでもよい。
【0057】
切断機構17の後述する一対の切断刃17aが互いに近づいて、電線5を切断するために一旦電線5が停止する際に、慣性により矢印Pに沿って電線5が進み、該電線5は特に一対の案内ローラ22間で弛もうとする。前述した構成の弛み吸収ユニット20の押圧部24は、電線5が停止する直前にスライダ26bが初期位置から鉛直方向に沿って下方に移動することでローラ部材27も鉛直方向に沿って下方に移動し(図2中、二点鎖線で示す)、ローラ部材27が電線5を鉛直方向に沿って押圧し始める。また、ローラ部材27は、電線5が停止した後も電線5を鉛直方向に沿って押圧して、電線5の弛みを吸収する。なお、この鉛直方向は、電線5の移動方向Pに直交(交差)する方向に相当する。
【0058】
また、電線5が停止すると、エアシリンダ25の伸縮ロッド25bが伸長してローラ部材27を第2の付勢力Q2で電線5に向かって付勢し、電線5に一定のテンションを付与する。こうして、弛み吸収ユニット20は、電線5が停止する直前から停止した後まで、電線5の弛みを吸収しかつ該電線5に一定のテンションを付与する。
【0059】
また、停止した電線5が再び移動する際にも、慣性によって該電線5は弛もうとする。前述した構成の弛み吸収ユニット20の押圧部24は前述したように停止した電線5の弛みを吸収し、エアシリンダ25は電線5に一定のテンションを付与している。そして、押圧部24は、電線5が移動し始めるとともにスライダ26bが鉛直方向に沿って上方に移動し始めるが、このときもローラ部材27は電線5を鉛直方向に沿って押圧している。また、エアシリンダ25の伸縮ロッド25bが縮みながらローラ部材27を第2の付勢力Q2で電線5に向かって付勢し、電線5に一定のテンションを付与している。そして、電線5が移動して所定時間が経過すると、スライダ26bが初期位置に戻ってローラ部材27による電線5の押圧が解除される。
【0060】
着色ユニット30は、ユニット本体31と、複数の噴出ユニット32とを備えている。ユニット本体31は、フレーム11に固定されている。ユニット本体31は、複数の噴出ユニット32を支持する。
【0061】
複数の噴出ユニット32は、図1に示すように、電線5の移動方向Pに沿って並んで設けられ、図示例では12個設けられている。噴出ユニット32は、弛み吸収ユニット20の送出ロール13側に設けられており、弛み吸収ユニット20と送出ロール13との間に設けられている。即ち、噴出ユニット32は、弛み吸収ユニット20より電線5の移動方向Pの下流側に設けられ、送出ロール13より電線5の移動方向Pの上流側に設けられている。
【0062】
複数の噴出ユニット32は、互いに異なる色の着色材を電線5の外表面5aに向かって噴出する。これによって、より多くの着色パターンを有した電線5を製造することができる。しかしながら、これら噴出ユニット32は、必ずしも互いに異なる色の着色材を噴出しなくてもよい。複数の噴出ユニット32は互いに略同構造であるので、以下、一つの噴出ユニット32(以下、第1の噴出ユニット32Aという)を代表して説明する。
【0063】
第1の噴出ユニット32Aは、図3に示すように、第1のノズル33Aと、第1の弁34Aと、第1の着色材供給源35Aとを備えている。第1のノズル33Aは、電線5の外表面5aに相対している。第1のノズル33Aは、着色材を通すことのできる孔を備えている。孔は、電線5の外表面5aに向かって直線状に伸びている。孔内には、第1の着色材供給源35Aから着色材が供給される。第1の着色材供給源35Aは、色Aの着色材を収容している。前記孔の開口部は、電線5の外表面5aに相対しており、内側に着色材を通すことができる。
【0064】
第1の弁34Aは、第1のノズル33Aと第1の着色材供給源35Aとの間に設けられ、これらと連結している。また、第1の着色材供給源35Aには、さらに、加圧気体供給源36が連結している。加圧気体供給源36は、加圧された気体を第1の着色材供給源35A内に供給する。なお、この加圧気体供給源36は、他の噴出ユニット32(以下、第2〜第12の噴出ユニット32B〜32Lという)の着色材供給源35B〜35Lにも連結されており、加圧された気体を該着色材供給源35B〜35L内に供給する。
【0065】
第1の弁34Aが開くと、加圧気体供給源36から供給される加圧された気体によって、第1のノズル33Aの孔内の着色材が前述した開口部を通って電線5の外表面5aに向かって噴出される。また、第1の弁34Aが閉じると、第1のノズル33A内の着色材の噴出が止まる。
【0066】
前述した構成の第1の噴出ユニット32Aは、制御装置40の後述する第1の弁駆動回路47Aからの信号によって第1の弁34Aが予め定められている時間開いて、一定量の着色材を電線5の外表面5aに向かって噴出する。こうして、第1の噴出ユニット32Aは、一定量ずつ着色材を滴射する。なお、滴射とは、液状の着色材が、第1のノズル33Aから液滴の状態即ち滴の状態で電線5の外表面5aに向かって付勢されて打ち出されることを示している。
【0067】
前述した第1の噴出ユニット32Aと同様に、第2〜第12の噴出ユニット32B〜32Lも、それぞれ、後述の対応する第2〜第12の弁駆動回路47B〜47Lからの信号によって一定量の着色材を電線5の外表面5aに向かって噴出可能である。このように、第1〜第12の噴出ユニット32A〜32Lは、電線5の外表面5aに向かって着色材を噴出して、電線5の外表面5aを着色する。
【0068】
前述した着色材とは、色材(工業用有機物質)が溶媒に溶解、分散した液状物質である。色材としては、染料、顔料(大部分は有機物であり、合成品)があり、時には染料が顔料として、顔料が染料として用いられることがある。より具体的な例として、着色材とは、着色液または塗料である。
【0069】
着色液とは、溶媒中に染料が溶けているものまたは分散しているものを示しており、塗料とは、分散液中に顔料が分散しているものを示している。このため、着色液が電線5の外表面5aに付着すると染料が被覆部52内に染み込み、塗料が電線5の外表面5aに付着すると顔料が被覆部52内に染み込むことなく外表面5aに接着する。また、溶媒と分散液とは、被覆部52を構成する合成樹脂と親和性のあるものが望ましい。この場合、染料が被覆部52内に確実に染み込んだり、顔料が電線5の外表面5aに確実に接着したりすることとなる。
【0070】
即ち、噴出ユニット32は、電線5の外表面5aの一部を染料で染める、または、電線5の外表面5aに顔料を塗る。このため、電線5の外表面5aを着色するとは、電線5の外表面5aの一部を染料で染める(染色する)ことと、電線5の外表面5aの一部に顔料を塗ることとを示している。
【0071】
ダクト15は、図1に示すように、噴出ユニット32の送出ロール13側に設けられており、噴出ユニット32と送出ロール13との間に設けられている。即ち、ダクト15は、噴出ユニット32より電線5の移動方向Pの下流側に設けられ、送出ロール13より電線5の移動方向Pの上流側に設けられている。ダクト15は、筒状に形成されており、内側に電線5を通す。ダクト15には、真空ポンプ等の図示しない吸引手段が連結されている。吸引手段は、ダクト15内の気体を吸引して、着色材中の溶媒と分散液等が外部に流出することを防止する。
【0072】
エンコーダ16は、回転子16aを一対備えている。回転子16aは、送出ロール13より電線5の移動方向Pの下流側に設けられている。回転子16aは、軸心回りに回転自在である。回転子16aの外周面は、一対の送出ロール13間に挟まれた電線5の外表面5aと接触している。一対の回転子16aは、互いの間に電線5を挟んでいる。回転子16aは、矢印Pに沿って電線5が移動すると回転する。回転子16aの回転数と、矢印Pに沿った電線5の移動距離とは比例する。
【0073】
このエンコーダ16は、図4に示すように、制御装置40の後述するパルス計数回路42に接続されている。エンコーダ16は、回転子16aが所定角度ずつ回転すると、制御装置40に向かってパルス信号を出力する。即ち、エンコーダ16は、矢印Pに沿った電線5の移動距離を検出し、この移動距離に応じた情報をパルス計数回路42に向かって出力する。本実施形態においては、電線5は所定の長さに切断されるが、電線5の移動距離がこの所定の長さに達したときに出力されるパルス信号をB1とする。なお、通常、エンコーダは、電線5とエンコーダ取付ロール(回転子)の摩擦によって電線5の移動量に応じたパルス信号を出力する。しかし、電線5の外表面5aの状態により電線5の移動量とパルス数が必ずしも一致しない場合は、別の場所で移動距離情報を入手し、その情報をフィードバックし、比較演算してもよい。
【0074】
切断機構17は、図1に示すように、エンコーダ16の一対の回転子16aよりも電線5の移動方向Pの下流側に配されている。切断機構17は、一対の切断刃17aを備えている。一対の切断刃17aは、鉛直方向に沿って並べられている。一対の切断刃17aは、鉛直方向に沿って互いに近づいたり離れたりする。一対の切断刃17aは、互いに近づくと、一対の送出ロール13によって送り出された電線5を互いの間に挟んで切断する。一対の切断刃17aは、互いに離れると、勿論、電線5から離れる。
【0075】
制御装置40は、図4に示すように、箱状の装置本体41と、パルス計数回路42と、制御手段としての制御回路43と、送出ロール駆動回路44と、リニアガイド駆動回路45と、弁選択回路46と、第1〜第12の弁駆動回路47A〜47L(図4には一部のみ示す)とを備えている。装置本体41は、パルス計数回路42と制御回路43と送出ロール駆動回路44とリニアガイド駆動回路45と弁選択回路46と弁駆動回路47A〜47L等を内部に収容している。
【0076】
パルス計数回路42は、前述したエンコーダ16から入力されるパルス信号をカウントする。パルス計数回路42は、制御回路43に接続されており、現在何番目のパルス信号がエンコーダ16から入力されたかを示す情報を制御回路43に向かって出力する。パルス計数回路42では、パルス分解能を上げるため、非常に高周波数のエンコーダ16で発生したパルス信号を分周してパルス計数回路42に入れる場合もある。
【0077】
制御回路43は、送出ロール駆動回路44とリニアガイド駆動回路45とに接続されている。制御装置40は、送出ロール13の動作を制御する。制御回路43は、エンコーダ16からパルス信号が入力されると(即ち電線5の移動距離に応じて)、送出ロール駆動回路44に送出ロール13を回転させて電線5を移動させるか否かの判定を行い、所定のパターンにしたがって送出ロール13に電線5を断続的に移動させる。そして、図5に示すように、制御回路43は、送出ロール駆動回路44に対して送出開始信号Aと送出停止信号Bとを出力する。
【0078】
送出開始信号Aは、送出ロール駆動回路44に送出ロール13を回転させて電線5を移動させる。送出開始信号Aは、予め定められたタイミング(例えば、送出停止信号Bが出力された所定時間後)で出力される。送出停止信号Bは、送出ロール駆動回路44に送出ロール13の回転を停止させて電線5を停止させる。送出停止信号Bは、所定の長さの電線5を送出したと判定してエンコーダ16から前述したパルス信号B1が入力されると出力される。
【0079】
さらに、制御回路43は、リニアガイド26の動作を制御する。制御回路43は、エンコーダ16からパルス信号が入力された際(即ち電線5の移動距離に応じて)、リニアガイド駆動回路45にスライダ26bを移動させてローラ部材27に電線5を押圧させるか否かの判定を行う。そして、制御回路43は、図5に示すように、リニアガイド駆動回路45に対して接近開始信号Cと接近停止信号Dと離間開始信号Eと離間停止信号Fとを出力する。
【0080】
接近開始信号Cは、リニアガイド駆動回路45にスライダ26bを鉛直方向に沿って下方に移動させて、ローラ部材27に電線5を押圧させる。接近開始信号Cは、予め定められた順番のパルス信号C1が入力されると出力される。このパルス信号C1は、電線5が前述した所定の長さを移動する際に出力されるパルス信号のうち、前述したパルス信号B1よりも先の順番のものとされている。これによって接近開始信号Cは、送出停止信号Bよりも先に出力され、電線5が停止し始める時間t3よりも前に出力される。
【0081】
接近停止信号Dは、リニアガイド駆動回路45にスライダ26bが鉛直方向に沿って下方に移動するのを停止させる。接近停止信号Dは、エンコーダ16等によって判定される電線5の停止する時間t4より後に出力される。即ち、接近停止信号Dは、送出停止信号Bよりも後に出力されるとともに、電線5が停止した後に出力される。
【0082】
離間開始信号Eは、リニアガイド駆動回路45にリニアガイド26のスライダ26bを鉛直方向に沿って上方に移動させて、ローラ部材27を電線5から遠ざける。離間開始信号Eは、送出開始信号Aと同時に出力される。なお、離間開始信号Eは、送出開始信号Aよりも後に出力されてもよい。
【0083】
離間停止信号Fは、リニアガイド駆動回路45にスライダ26bが鉛直方向に沿って上方に移動するのを停止させる。離間停止信号Fは、離間開始信号E(送出開始信号A)が出力されてから所定時間後に出力され、例えば、タイマーによって前述した所定時間後に出力される。本実施形態においては、この所定時間は、電線5が一定速度で動き出す時間t2より前までとされているが、時間t2の後まででもよい。
【0084】
前述した構成の制御回路43は、電線5の停止時前後において、接近開始信号C、送出停止信号B、接近停止信号Dの順にこれら信号C、B、Dを出力する。そして、制御回路43は、電線5が停止し始める時間t3より前から該電線5が停止する時間t4より後までローラ部材27に電線5を押圧させる。こうして、制御回路43は、エンコーダ16の検出した電線5の移動距離に応じて送出停止信号Bを出力して送出ロール13に電線5を停止させる直前から一定時間後まで、ローラ部材27に電線5を押圧させる。特許請求の範囲の請求項1及び請求項8に記載した「一定時間後」とは、電線5の停止する時間t4よりも後までを意味している。
【0085】
また、前述した構成の制御回路43は、電線5の移動開始時前後において、送出開始信号Aと離間開始信号E、離間停止信号Fの順にこれら信号A、E、Fを出力する。制御回路43は、電線5の停止時にはローラ部材27に電線5を押圧させている。そして、制御回路43は、電線5が移動し始める時間t1より前から該電線5が移動を開始した後までローラ部材27に電線5を押圧させる。こうして、制御回路43は、エンコーダ16の検出した電線5の移動距離に応じて送出開始信号Aを出力して送出ロール13に電線5を移動させる直前から一定時間後まで、ローラ部材27に電線5を押圧させる。特許請求の範囲の請求項2及び請求項9に記載した「一定時間後」とは、電線5が移動し始める時間t1よりも後までを意味している。
【0086】
送出ロール駆動回路44は、図4に示すように、図示しないインターフェースを介して送出ロール13と接続されている。送出ロール駆動回路44は、制御回路43から送出開始信号Aや送出停止信号Bが入力されると、送出ロール13に向かってこれら信号A、Bを出力して、送出ロール13を回転させたり停止させたりする。
【0087】
リニアガイド駆動回路45は、図示しないインターフェースを介して駆動部29と接続されている。リニアガイド駆動回路45は、制御回路43から接近開始信号Cや接近停止信号Dが入力されると、駆動部29に向かってこれら信号C、Dを出力して、スライダ26bを電線5に近づくように移動させたりこの移動を停止させたりする。また、リニアガイド駆動回路45は、制御回路43から離間開始信号Eや離間停止信号Fが入力されると、駆動部29に向かってこれら信号E、Fを出力して、スライダ26bを電線5から遠ざかるように移動させたりこの移動を停止させたりする。
【0088】
弁選択回路46と第1〜第12の弁駆動回路47A〜47Lとは、前述した噴出ユニット32A〜32Lを制御する。弁選択回路46は、パルス計数回路42に接続されているとともに、各弁駆動回路47A〜47Lに接続されている。弁選択回路46は、予め定められた順番のパルス信号が入力された際に、各弁駆動回路47A〜47Lに各弁34A〜34Lを開かせる信号を出力する。弁選択回路46は、電線5の外表面5aに形成する印6のパターンに応じて、各弁駆動回路47A〜47Lに各弁34A〜34Lを開かせる信号を出力する。
【0089】
即ち、弁選択回路46は、エンコーダ16から入力されたパルス信号毎に各弁34A〜34Lのうちいずれかを開くか、またはいずれとも閉じたままとするかを記憶しており、この記憶したパターンに従って各弁駆動回路47A〜47Lを制御する。ただし、パルス計数回路42と弁駆動回路47A〜47Lとが直接繋がる場合は、弁選択回路46を省略することができる。
【0090】
このように、弁選択回路46は、電線5の外表面5aを着色するパターンを予め記憶している。また、弁選択回路46は、エンコーダ16から入力される電線5の移動距離に応じて、記憶したパターン通りに、各噴出ユニット32A〜32Lに一定量ずつ着色材を電線5の外表面5aに向かって噴出させることができる。
【0091】
第1〜第12の弁駆動回路47A〜47Lは、第1〜第12の噴出ユニット32A〜32Lと同数設けられており、それぞれ各噴出ユニット32A〜32Lに対応している。弁駆動回路47A〜47Lは、図示しないインターフェースを介して対応する噴出ユニット32A〜32Lの弁34A〜34Lと接続されている。弁駆動回路47A〜47Lは、弁選択回路46から対応する弁34A〜34Lを開く信号が入力されると、該信号を弁34A〜34Lに向かって出力する。弁駆動回路47A〜47Lが対応する弁34A〜34Lを開く信号を弁34A〜34Lに向かって出力すると、対応する弁34A〜34Lが開く。こうして、弁駆動回路47A〜47Lは、前述した信号を対応する弁34A〜34Lに向かって出力することで、対応する弁34A〜34Lの開閉を制御する。
【0092】
前述した構成の弛み吸収装置1で、長尺の電線5の外表面5aを着色して該電線5を所定の長さに切断し、該電線5をその長手方向に沿って断続的に移動させる際の電線5の弛みを吸収するには、まず、ガイドロール12をフレーム11に取り付ける。一対の切断刃17aを互いに離しておき、ガイドロール12に巻かれた電線5を矯正ユニット14と弛み吸収ユニット20と着色ユニット30とダクト15とに順に通して、一対の送出ロール13間に挟む。そして、所定箇所に噴出ユニット32A〜32Lのノズル33A〜33Lを取り付け、各ノズル33A〜33Lに対応する着色材供給源35A〜35Lを連結する。さらに加圧気体供給源36を着色材供給源35A〜35Lに連結し、吸引手段でダクト15内の気体を吸引する。
【0093】
そして、送出ロール13を回転駆動して、電線5をガイドロール12から引っ張って該電線5の長手方向に沿って移動させるとともに、矯正ユニット14により電線5に第1の付勢力Q1の摩擦力を付与して、該電線5を張っておく。そして、エアシリンダ25でローラ部材27を電線5に向かって第2の付勢力Q2で付勢しておく。
【0094】
そして、エンコーダ16から予め定められた順番のパルス信号がパルス計数回路42に入力されると、所定のパターンに応じて、弁駆動回路47A〜47Lのいずれかが対応する弁34A〜34Lを所定時間、所定回数開く。すると、噴出ユニット32A〜32Lのいずれかは、着色材を一定量ずつ移動中の電線5の外表面5aに向かって噴出(滴射)する。例えば、弁駆動回路47Aが該弁34Aを所定時間、1回開くと、電線5の外表面5aには図7に示す印6が形成される。
【0095】
そして、電線5の外表面5aに付着した着色材から前述した溶媒または分散液が蒸発して、電線5の外表面5aを染料で染めるまたは外表面5aに顔料を塗る。電線5の外表面5aに付着した着色材から蒸発した溶媒または分散液は、ダクト15内から吸引手段に吸引される。こうして、電線5の外表面5aが着色される。なお、本実施形態においては移動中の電線5の外表面5aを着色しているが、停止した状態の電線5の外表面5aを着色してもよい。
【0096】
制御装置40の制御回路43は、図6に示すように、電線5の移動距離が所定の長さに達する直前にエンコーダ16からパルス信号C1が出力されると、接近開始信号Cを出力してスライダ26b即ちローラ部材27を鉛直方向に沿って下方に移動させて電線5を押圧させ、次いで送出停止信号Bを出力して送出ロール13即ち電線5を停止させ、最後に接近停止信号Dを出力してスライダ26b即ちローラ部材27の下方への移動を停止させる。ローラ部材27は、電線5が停止する直前から停止した後まで電線5を押圧して、電線5の弛みを吸収する。
【0097】
さらに、電線5が停止するとエアシリンダ25の伸縮ロッド25bが伸長して第2の付勢力Q2でローラ部材27を常に電線5に向かって付勢し、電線5に一定のテンションを付与する。こうして、電線5の停止時前後の電線5の弛みが吸収される。その後、一対の切断刃17aが互いに近づいて、これら切断刃17a間に電線5を挟んで切断する。
【0098】
電線5が停止しているとき、スライダ26bが下方に位置付けられかつ伸縮ロッド25bが伸長して、ローラ部材27は電線5の弛みを吸収しかつ電線5に一定のテンションを付与している。この停止した電線5を再び移動させる際には、制御回路43は、まず、送出開始信号Aを出力して送出ロール13を回転させ始めるとともに、離間開始信号Eを出力してスライダ26b即ちローラ部材27を鉛直方向に沿って上方に移動させて電線5から遠ざける(このときも、ローラ部材27は電線5を押圧している)。こうして、電線5が移動する直前から移動を開始した直後の電線5の弛みが吸収される。その後、制御回路43は、離間停止信号Fを出力してスライダ26b即ちローラ部材27の上方への移動を停止させて、スライダ26bを初期位置へ戻してローラ部材27の電線5の押圧を解除する。
【0099】
本実施形態によれば、電線5を該電線5の長手方向に沿って移動させる送出ロール13と、所定のパターンにしたがって送出ロール13に電線5を断続的に移動させる制御回路43と、電線5の移動距離を検出するエンコーダ16と、電線5の移動方向Pに交差する方向に沿って電線5を押圧する押圧部24とを備えるとともに、制御回路43が、エンコーダ16の検出した電線5の移動距離に応じて送出ロール13に電線5を停止させる直前から一定時間後まで押圧部24に電線5を押圧させるので、押圧部24が電線5の停止時に電線5の弛み始める前から電線5の停止した後まで電線5を押圧することで、電線5の停止時前後における電線5の弛みを確実に防止することができる。
【0100】
制御回路43が、エンコーダ16の検出した電線5の移動距離に応じて送出ロール13に電線5を停止させた後に再び電線5を移動させる直前から一定時間後まで押圧部24に電線5を押圧させるので、押圧部24が電線5の移動開始時に電線5の弛み始める前から電線5の移動後まで電線5を押圧することで、電線5の移動開始時前後における電線5の弛みを確実に防止することができる。
【0101】
押圧部24が、その外周面が電線5と接触して回転自在に設けられかつ制御回路43からの命令によって電線5を押圧するローラ部材27を備えているので、電線5を押圧する際にローラ部材27が回転することで電線5とローラ部材27との摩擦力が緩和され、電線5との接触部分の部品の消耗を軽減することができる。
【0102】
ローラ部材27の回転を停止させるブレーキ部を備えているので、自らの慣性や電線5の慣性によるローラ部材27の回転を停止させ、この停止させた状態のローラ部材27で電線5の停止時や移動開始時に電線5を押圧することで、電線5を確実に押圧することができる。
【0103】
ローラ部材27を常に電線5に向かって付勢するエアシリンダ25を備えているので、電線5に常に一定のテンションが付与されて、電線5の弛みを更に確実に防止することができるとともに、特に移動中の電線5の弛みを防止することができる。
【0104】
電線5の外表面5aを着色する着色ユニット30を備えているので、弛みのない状態の電線5の外表面5aを着色することができ、電線5を予め定められたパターンに確実に着色して電線5同士の識別を確実に行うことができる。
【0105】
電線5を切断(加工)する切断機構17を備えているので、電線5を切断(加工)する際に電線5が弛むことがなく、電線5の切断を確実に行うことができる。
【0106】
本実施形態においては、ローラ部材27を常に電線5に向かって付勢するエアシリンダ25が設けられていたが、エアシリンダ25がなくても電線5の弛みを防止することができる。また、本実施形態においてはローラ部材27の回転を停止させるブレーキ部が設けられていたが、ブレーキ部がなくても電線5の弛みを防止することができる。しかしながら、より確実に電線5の弛みを防止するためには、エアシリンダ25やブレーキ部があると好ましい。
【0107】
なお、前述した実施形態は本発明の代表的な形態を示したに過ぎず、本発明は、実施形態に限定されるものではない。即ち、本発明の骨子を逸脱しない範囲で種々変形して実施することができる。
【図面の簡単な説明】
【0108】
【図1】本発明の一実施形態にかかる電線の弛み吸収装置の構成を示す説明図である。
【図2】図1に示された弛み吸収ユニットを拡大して示す説明図である。
【図3】図1に示された着色ユニットの噴出ユニットの構成を示す説明図である。
【図4】図1に示された制御装置の構成を示す説明図である。
【図5】図4に示された制御回路によって制御される送出ロールとスライダの動作を示すタイミングチャートである。
【図6】図4に示された制御回路によって制御される送出ロールとスライダの動作を示すフローチャートである。
【図7】図1に示された電線が着色された状態を示す上面(一部断面)図である。
【符号の説明】
【0109】
1 電線の弛み吸収装置
5 電線
13 送出ロール(移動手段)
16 エンコーダ(検出手段)
17 切断機構(加工手段)
24 押圧部(押圧手段)
25 エアシリンダ(付勢手段)
27 ローラ部材
30 着色ユニット(着色手段)
43 制御回路(制御手段)
【特許請求の範囲】
【請求項1】
一方向に沿って断続的に移動する電線の弛みを吸収する電線の弛み吸収装置において、
前記電線を該電線の長手方向に沿って移動させる移動手段と、
所定のパターンにしたがって前記移動手段に前記電線を断続的に移動させる制御手段と、
前記電線の移動距離を検出する検出手段と、
前記電線の移動方向に交差する方向に沿って前記電線を押圧する押圧手段と、を備えるとともに、
前記制御手段が、前記検出手段の検出した前記電線の移動距離に応じて前記移動手段に前記電線を停止させる直前から一定時間後まで、前記押圧手段に前記電線を押圧させることを特徴とする電線の弛み吸収装置。
【請求項2】
一方向に沿って断続的に移動する電線の弛みを吸収する電線の弛み吸収装置において、
前記電線を該電線の長手方向に沿って移動させる移動手段と、
所定のパターンにしたがって前記移動手段に前記電線を断続的に移動させる制御手段と、
前記電線の移動距離を検出する検出手段と、
前記電線の移動方向に交差する方向に沿って前記電線を押圧する押圧手段と、を備えるとともに、
前記制御手段が、前記検出手段の検出した前記電線の移動距離に応じて前記移動手段に前記電線を停止させた後に再び前記電線を移動させる直前から一定時間後まで、前記押圧手段に前記電線を押圧させることを特徴とする電線の弛み吸収装置。
【請求項3】
前記制御手段が、前記検出手段の検出した前記電線の移動距離に応じて前記移動手段に前記電線を停止させた後に再び前記電線を移動させる直前から一定時間後まで、前記押圧手段に前記電線を押圧させることを特徴とする請求項1に記載の電線の弛み吸収装置。
【請求項4】
前記押圧手段が、その外周面が前記電線と接触して回転自在に設けられ、かつ、前記制御手段からの命令によって前記電線を押圧するローラ部材を備えたことを特徴とする請求項1ないし請求項3のうちいずれか一項に記載の電線の弛み吸収装置。
【請求項5】
前記ローラ部材の回転を停止させるブレーキ部を備えたことを特徴とする請求項4に記載の電線の弛み吸収装置。
【請求項6】
前記ローラ部材を常に前記電線に向かって付勢する付勢手段を備えたことを特徴とする請求項4または請求項5に記載の電線の弛み吸収装置。
【請求項7】
前記電線の外表面を着色する着色手段を備えたことを特徴とする請求項1ないし請求項6のうちいずれか一項に記載の電線の弛み吸収装置。
【請求項8】
一方向に沿って断続的に移動する電線の弛みを吸収する電線の弛み吸収方法において、
前記電線の移動距離に応じて前記電線を停止させる直前から一定時間後まで、前記電線を該電線の移動方向に交差する方向に沿って押圧することを特徴とする電線の弛み吸収方法。
【請求項9】
一方向に沿って断続的に移動する電線の弛みを吸収する電線の弛み吸収方法において、
前記電線の移動距離に応じて前記電線を停止させた後に再び前記電線を移動させる直前から一定時間後まで、前記電線を該電線の移動方向に交差する方向に沿って押圧することを特徴とする電線の弛み吸収方法。
【請求項1】
一方向に沿って断続的に移動する電線の弛みを吸収する電線の弛み吸収装置において、
前記電線を該電線の長手方向に沿って移動させる移動手段と、
所定のパターンにしたがって前記移動手段に前記電線を断続的に移動させる制御手段と、
前記電線の移動距離を検出する検出手段と、
前記電線の移動方向に交差する方向に沿って前記電線を押圧する押圧手段と、を備えるとともに、
前記制御手段が、前記検出手段の検出した前記電線の移動距離に応じて前記移動手段に前記電線を停止させる直前から一定時間後まで、前記押圧手段に前記電線を押圧させることを特徴とする電線の弛み吸収装置。
【請求項2】
一方向に沿って断続的に移動する電線の弛みを吸収する電線の弛み吸収装置において、
前記電線を該電線の長手方向に沿って移動させる移動手段と、
所定のパターンにしたがって前記移動手段に前記電線を断続的に移動させる制御手段と、
前記電線の移動距離を検出する検出手段と、
前記電線の移動方向に交差する方向に沿って前記電線を押圧する押圧手段と、を備えるとともに、
前記制御手段が、前記検出手段の検出した前記電線の移動距離に応じて前記移動手段に前記電線を停止させた後に再び前記電線を移動させる直前から一定時間後まで、前記押圧手段に前記電線を押圧させることを特徴とする電線の弛み吸収装置。
【請求項3】
前記制御手段が、前記検出手段の検出した前記電線の移動距離に応じて前記移動手段に前記電線を停止させた後に再び前記電線を移動させる直前から一定時間後まで、前記押圧手段に前記電線を押圧させることを特徴とする請求項1に記載の電線の弛み吸収装置。
【請求項4】
前記押圧手段が、その外周面が前記電線と接触して回転自在に設けられ、かつ、前記制御手段からの命令によって前記電線を押圧するローラ部材を備えたことを特徴とする請求項1ないし請求項3のうちいずれか一項に記載の電線の弛み吸収装置。
【請求項5】
前記ローラ部材の回転を停止させるブレーキ部を備えたことを特徴とする請求項4に記載の電線の弛み吸収装置。
【請求項6】
前記ローラ部材を常に前記電線に向かって付勢する付勢手段を備えたことを特徴とする請求項4または請求項5に記載の電線の弛み吸収装置。
【請求項7】
前記電線の外表面を着色する着色手段を備えたことを特徴とする請求項1ないし請求項6のうちいずれか一項に記載の電線の弛み吸収装置。
【請求項8】
一方向に沿って断続的に移動する電線の弛みを吸収する電線の弛み吸収方法において、
前記電線の移動距離に応じて前記電線を停止させる直前から一定時間後まで、前記電線を該電線の移動方向に交差する方向に沿って押圧することを特徴とする電線の弛み吸収方法。
【請求項9】
一方向に沿って断続的に移動する電線の弛みを吸収する電線の弛み吸収方法において、
前記電線の移動距離に応じて前記電線を停止させた後に再び前記電線を移動させる直前から一定時間後まで、前記電線を該電線の移動方向に交差する方向に沿って押圧することを特徴とする電線の弛み吸収方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2009−193849(P2009−193849A)
【公開日】平成21年8月27日(2009.8.27)
【国際特許分類】
【出願番号】特願2008−34470(P2008−34470)
【出願日】平成20年2月15日(2008.2.15)
【出願人】(000006895)矢崎総業株式会社 (7,019)
【Fターム(参考)】
【公開日】平成21年8月27日(2009.8.27)
【国際特許分類】
【出願日】平成20年2月15日(2008.2.15)
【出願人】(000006895)矢崎総業株式会社 (7,019)
【Fターム(参考)】
[ Back to top ]