
電車線位置計測装置
【課題】安価で正確な電車線位置計測装置を提供する。
【解決手段】電車線2のz方向の位置を計測するのに用いられる近接センサ18がパンタグラフ14に配設される。近接センサ18は、隣接する近接センサ18の検出範囲が重なるように、電車線2の付設方向と略平行な面内において千鳥状に2次元配置される。電車線2はz方向の位置を変えながら敷設されるため、工作車10を自走させると反応する近接センサ18が変化する。したがって、どの近接センサが反応したかを把握することにより、電車線2の位置を計測することができる。
【解決手段】電車線2のz方向の位置を計測するのに用いられる近接センサ18がパンタグラフ14に配設される。近接センサ18は、隣接する近接センサ18の検出範囲が重なるように、電車線2の付設方向と略平行な面内において千鳥状に2次元配置される。電車線2はz方向の位置を変えながら敷設されるため、工作車10を自走させると反応する近接センサ18が変化する。したがって、どの近接センサが反応したかを把握することにより、電車線2の位置を計測することができる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、モノレールや電気鉄道などの軌道に沿って、車輌に電力を供給するために設置される電車線における点検作業に関し、特に敷設時に電車線の位置を計測するための技術に関する。
【背景技術】
【0002】
特許文献1には、パンタグラフと電車線との接触位置をカメラ等で撮影して電車線の離線を検知する技術が開示されている。
【0003】
特許文献2には、近接センサの信号をトリガーにしてカメラで画像を撮影し、トロリー線の位置を測定する技術が開示されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2007−288893号公報
【特許文献2】特開2006−282128号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、特許文献1、2に記載の発明においては、電車線等をカメラで撮影する必要があり、装置が高価となるという問題がある。また、画像処理を用いるため、誤検知の恐れがある。
【0006】
本発明はこのような事情に鑑みてなされたもので、安価で正確な電車線位置計測装置を提供することを目的とする。
【課題を解決するための手段】
【0007】
請求項1に記載の電車線位置計測装置は、電車線に当接するように車両に配設されたパンタグラフと、検出面の前面に前記電車線が存在することを検出する複数の検出センサであって、前記検出面が前記電車線に対向するように、かつ前記検出面が前記当接面と平行方向及び前記電車線の敷設方向に対して略直交方向に並んだ状態で前記パンタグラフに配設された複数の近接センサと、を備えたことを特徴とする。
【0008】
請求項1に記載の電車線位置計測装置によれば、車両にパンタグラフが配設され、パンタグラフの検出面の前面に前記電車線が存在することを検出する複数の近接センサが配設される。パンタグラフは、電車線に当接するよう、かつ電車線と当接する面(以下、当接面という)が電車線の付設方向と略平行となるように配設されている。複数の検出センサは、検出面が前記電車線に対向するように、かつ検出面が前記当接面と平行方向及び電車線の敷設方向に対して略直交方向に並んだ状態で配設される。これにより、一定の範囲内に敷設された電車線を検出することができる。
【0009】
請求項2に記載の電車線位置計測装置は、請求項1に記載の電車線位置計測装置において、前記近接センサは、検出面が千鳥状に2次元配置されたことを特徴とする。
【0010】
請求項2に記載の電車線位置計測装置によれば、近接センサの検出面が千鳥状に2次元配置されるため、近接センサの検出範囲は近接センサの外径より小さい場合においても、電車線が敷設される一定の範囲内で、電車線の検出ができない範囲がないようにすることができる。
【0011】
請求項3に記載の電車線位置計測装置は、請求項1又は2に記載の電車線位置計測装置において、前記近接センサは、前記当接面より磨耗代だけ奥側に前記検出面が位置するように配設されることを特徴とする。
【0012】
請求項3に記載の電車線位置計測装置によれば、当接面より磨耗代だけ奥側に検出面が位置するように近接センサが配設されるため、検出面が電車線に接触することを防止することができる。
【0013】
請求項4に記載の電車線位置計測装置は、請求項1、2又は3に記載の電車線位置計測装置において、前記検出センサは、金属のみを検出可能な非接触センサであることを特徴とする。
【0014】
請求項4に記載の電車線位置計測装置によれば、金属のみを検出可能な非接触センサを用いるため、電車線のみを確実に検出することができる。
【0015】
請求項5に記載の電車線位置計測装置は、請求項1から4のいずれかに記載の電車線位置計測装置において、前記車両は、電車線からの電力供給無しに自走可能な検査用車両であり、前記パンタグラフは、非導電性の材料で形成されることを特徴とする。
【0016】
請求項5に記載の電車線位置計測装置によれば、パンタグラフが非導電性の材料で形成されるため、パンタグラフにより電車線が傷つくことを防止することができる。
【0017】
請求項6に記載の電車線位置計測装置は、請求項1から5のいずれかに記載の電車線位置計測装置において、前記複数の近接センサのうちの前面に前記電車線が存在することを検出した近接センサを示す近接センサ検出情報を前記電車線の位置の計測結果として出力する出力手段を備えたことを特徴とする。
【0018】
請求項6に記載の電車線位置計測装置によれば、複数の近接センサのうちの前面に電車線が存在することを検出した近接センサを示す近接センサ検出情報を電車線の位置の計測結果として出力するため、複雑な処理をすることなく電車線の位置を計測可能である。
【0019】
請求項7に記載の電車線位置計測装置は、請求項6に記載の電車線位置計測装置において、前記車両の速度を測定する速度測定手段と、前記速度測定手段の測定結果に基づいて前記車両の走行距離を算出する走行距離算出手段と、を備え、前記出力手段は、前記近接センサ検出情報と、前記走行距離とを関連付けて出力することを特徴とする。
【0020】
請求項7に記載の電車線位置計測装置によれば、近接センサ検出情報と走行距離とを関連付けたものを電車線の位置の計測結果として出力するため、不具合箇所を一目で認識することができる。
【0021】
請求項8に記載の電車線位置計測装置は、請求項6又は7に記載の電車線位置計測装置において、前記車両の変位を検出する検出手段と、前記検出手段による検出結果を用いて前記近接センサ検出情報を補正する補正手段と、を備えたことを特徴とする。
【0022】
請求項8に記載の電車線位置計測装置によれば、車両の変位検出結果を用いて近接センサ検出情報を補正するため、電車線の位置をより正確に計測することができる。
【発明の効果】
【0023】
本発明によれば、安価で正確な電車線位置計測装置を提供することができる。
【図面の簡単な説明】
【0024】
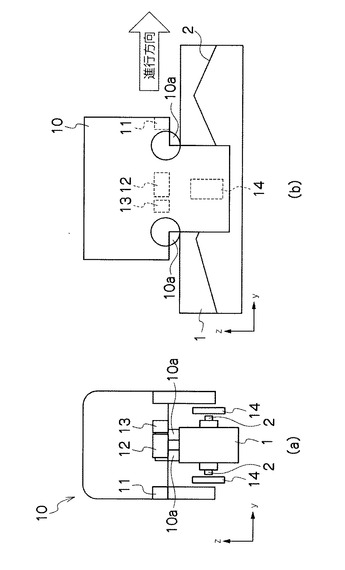
【図1】跨座式モノレールの軌道桁及び軌道桁に沿って自走可能な検査用車両を示す模式図であり、(a)は正面図、(b)は側面図。
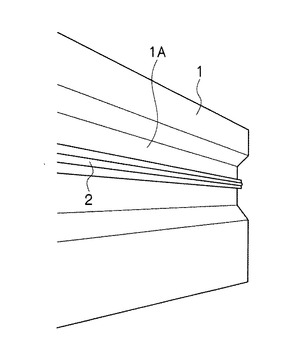
【図2】軌道桁の斜視図。
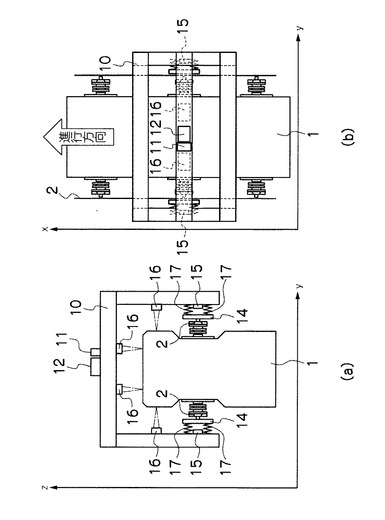
【図3】検査用車両の下部の詳細を示す模式図であり、(a)は正面図、(b)は平面図。
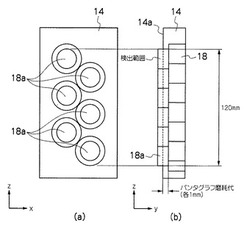
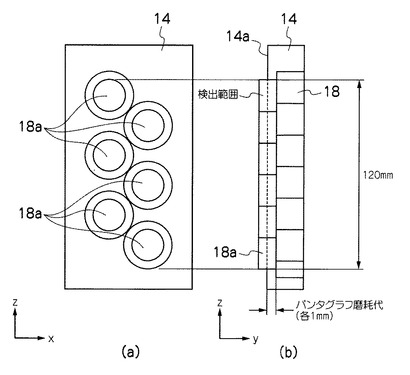
【図4】(a)はパンタグラフの正面図であり、(b)はパンタグラフの側面透視図。
【図5】近接センサの検出範囲を示す図。
【図6】検査用車両の移動に伴い反応する近接センサが変化する様子を説明する図。
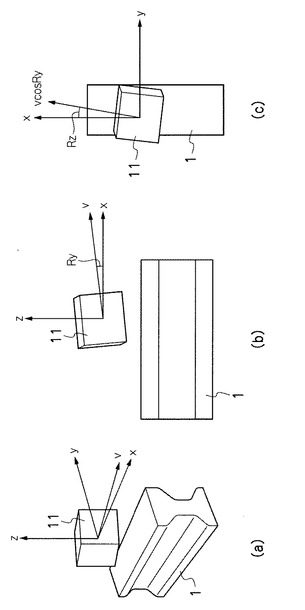
【図7】車速センサで検出された速度から各軸の速度成分を算出する方法を説明する図であり、(a)は斜視図、(b)は側面図、(c)は平面図である。
【図8】走行距離の算出方法を説明する図。
【図9】4個の近接センサが2列に千鳥状に配設された場合の電車線の計測結果の一例。
【図10】軌道桁の位置測定方法を説明する図であり、(a)は斜視図、(b)は側面図、(c)は平面図である。
【発明を実施するための形態】
【0025】
以下、添付図面に従って本発明に係る電車線位置計測装置の実施の形態について説明する。
【0026】
<第1の実施の形態>
図1は本発明が適用される跨座式モノレールの軌道桁1及び軌道桁1に沿って自走可能な検査用車両10を示す模式図であり、(a)は正面図、(b)は側面図である。
【0027】
軌道桁1は、図2に示すように両側面に案内面凹凸1Aが形成され、案内面凹凸1A内に電車線2が敷設される。電車線2は、モノレール車両のパンタグラフの一部のみがすり減らないようにするため、案内面凹凸1A内を限度に上下方向(z方向)の位置を変えながら敷設される。なお、x方向はある地点(たとえば始点)における検査用車両10の進行方向(電車線2の付設方向)であり、y方向は軌道桁1を上から見たときのx方向と直交する方向であり、z方向はx方向と平行かつy方向と直交する方向である。
【0028】
検査用車両10は、敷設時及び敷設後の検査時に用いられる車両であり、底部に配設されたタイヤ10aを用いて軌道桁1の上を走行する。検査用車両10の内部には、主として、検査用車両を自走可能とする駆動手段(図示せず)と、位置補正及び走行距離取得に用いられる車速センサ11と、位置補正に用いられるジャイロセンサ12と、演算装置13とが配設される。ジャイロセンサ12は、検査用車両10の左右方向(y方向)、前後方向(x方向)の略中心近傍に配設される。なお、ジャイロセンサ12は本実施の形態では使用せず、後に詳述する近接センサ18の出力の補正処理で使用される。
【0029】
図3は、検査用車両10の下部の詳細を示す模式図であり、(a)は正面図、(b)は平面図である。図3では、模式的に検査用車両10をコの字状のフレームで示す。
【0030】
検査用車両10の底面下部側面内側上部には、軌道桁1の軌跡を計測するレーザ式変位計16が4か所配設される。検査用車両10の側面内側下部には、主として、パンタグラフ14と、超音波式変位計15が配設される。超音波式変位計15は、電車線2のy方向の位置を計測するのに用いられる。
【0031】
パンタグラフ14は、電車線2に所定の力で接触するように、弾性部材17を介して検査用車両10に配設される。検査用車両10は自走可能であるため、電車線2から電力供給を受ける必要はない。したがって、パンタグラフ14は、非導電性かつ銅製の電車線2より弱い素材、例えばアクリル、強化プラスチック等が用いられる。そのため、電車線2が傷つくことはない。
【0032】
パンタグラフ14には、近接センサ18が複数配設される。近接センサ18は、電車線2のz方向の位置を計測するのに用いられる。近接センサ18は、直径が略30mm程度の略円筒形の非接触センサであり、前面に検出面18aが配設される。近接センサ18の内部には検出コイル(図示せず)が配設されており、検出面18aから常時高周波磁界が発生している。金属が検出面18a近傍に接近すると、高周波磁界により金属中に誘導電流が流れ、熱損失が発生して高周波磁界の発振が減衰または停止することにより、検出面18aの前面に金属(本実施の形態では電車線2)が存在することを検出する。したがって、近接センサ18は金属のみを検出し、他の材料は検出しない。本実施の形態では、パンタグラフ14は、非導電性の素材で形成されるため、誤検出を防止することができる。
【0033】
図4(a)はパンタグラフ14の正面図であり、図4(b)はパンタグラフ14の側面透視図である。パンタグラフ14に丸孔を形成し、丸孔に近接センサ18を埋め込むことにより、複数の近接センサ18がパンタグラフ14に配設される。近接センサ18は、検出面18aが電車線2に対向するよう配設される。
【0034】
電車線2がz方向の一定の範囲内に配設されるため、近接センサ18は、図4(a)に示すように、z方向、すなわち電車線2の敷設方向に対して略直交方向に並んだ状態でパンタグラフ14に配設される。パンタグラフ14が電車線2より柔らかい材料で形成されているため、近接センサ18は、図4(b)に示すように、検出面18aがパンタグラフ14の電車線2と当接する面(以下、当接面という)14aと平行となり、かつ当接面14aから磨耗代(本実施の形態では略1mm)だけ奥に位置するように配設される。これにより、検出面18aが電車線2に接触することを防止することができる。
【0035】
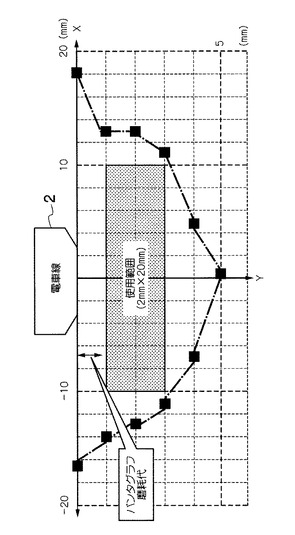
図5は、近接センサ18の検出範囲を示す図であり、X方向は近接センサ18の径方向であり、Y方向は検出面18aに直行する方向、すなわち軸方向である。直径30mmの近接センサ18の中心位置をX方向に変化させた時に、電車線を検出可能なY方向距離をプロットしたものである。すなわち、プロットとX軸で囲まれる領域が検出可能エリアとなるが、その内の電車線を中心とした半径10mm、Y方向距離2mmの範囲を確実に検出するエリアに選定し、近接センサ18を複数配列するようにした。なお、Y方向の検出距離は、パンタグラフ14の磨耗代(略1mm)を考慮してある。
【0036】
このように、使用可能な検出範囲は、近接センサ18の外径(略30mm)より小さくなる。そのため、図4(a)に示すように、近接センサ18は、隣接する近接センサ18の検出範囲が接する又は重なるように、検出面18aが千鳥状に2次元配置される。本実施の形態では、検出範囲が略1mm重なるように近接センサ18が配設される。これにより、電車線2が敷設される範囲(本実施の形態では略120mm)の範囲内で、電車線2の検出ができない範囲がないようにすることができる。
【0037】
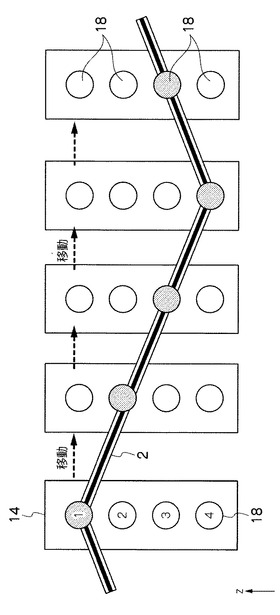
電車線2の計測は、検査用車両10を自走させながら行われる。近接センサ18で電車線2が検出されるが、図6に示すように、検査用車両10の移動に伴い反応する近接センサ18が変化する。なお、図6では、わかりやすくするため、8個の近接センサ18が千鳥状に2次元配置された場合における1列分の近接センサ18のみを示す。図6においては、まず、番号1の近接センサ18が反応し、検査用車両10が移動すると次に番号2の近接センサ18が反応する。検査用車両10の移動に伴い、番号3、番号4、番号3・・・の近接センサ18が順に反応する。したがって、複数配設された近接センサ18のうちのどの近接センサ18が電車線2を検出したかという情報(以下、近接センサ18の検出結果という)を取得することにより、電車線2のz方向の位置を計測することができる。近接センサ18の検出結果は、演算装置13に入力される。演算装置13は、測定結果と時刻とを関連付けて演算装置13内のメモリ(図示せず)に記憶する。
【0038】
近接センサ18で電車線2のz方向の位置を検出するのと同時に、車速センサ11で検査用車両10の速度を検出する。検出結果は演算装置13に入力される。演算装置13は、車速センサ11で検出された速度を、図7に示すように3軸に分解し、数式1に基づいて各軸の速度成分を算出する。
【0039】
[数1]
vx=vcosRzcosRy
vy=vcosRzsinRy
vz=vsinRz
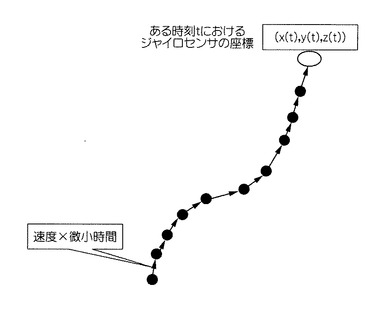
演算装置13は、各軸の速度成分に基づいて、ある時刻tにおけるジャイロセンサ12の座標(x(t), y(t),z(t))、すなわち検査用車両10の座標(x(t), y(t),z(t))を算出する。座標(x(t), y(t),z(t))は、図8及び数式2に示すように、速度と時間の積により求められる。
【0040】
[数2]
x(t)=Σvx△t=Σ( vcosRzcosRy)△t
y(t)= Σvy△t△t=Σ(vcosRzsinRy)△t
z(t)= Σ vz△t△t=Σ(vsinRz)△t
演算装置13は、座標(x(t), y(t))に基づいて検査用車両10の各時刻毎の走行距離を算出する。そして、演算装置13は、ある時刻における走行距離と近接センサ18の検出結果とを関連付けて、演算装置13内のメモリ(図示せず)に記憶する。
【0041】
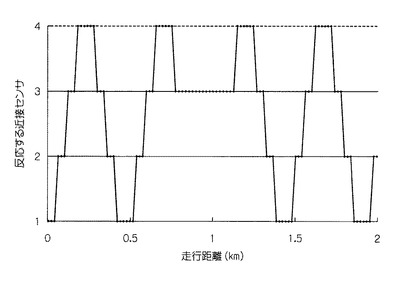
演算装置13は、同じ時刻における近接センサ18の検出位置と走行距離と関連付け、それを電車線2の計測結果として出力する。出力結果は、図示しないモニタに表示されたり、図示しないメモリに記憶されたりする。図9は、4個の近接センサ18が2列に千鳥状に配設された場合の電車線2の計測結果の一例である。図9の横軸は走行距離であり、縦軸は反応した近接センサ18の番号、すなわち電車線2のz方向の位置である。近接センサ18の検出結果をそのまま電車線2の計測結果とできるため、複雑な処理をすることなく電車線2の位置を計測可能である。
【0042】
なお、本発明では図4に示すように千鳥状に近接センサ18が配設されているため、隣接する2つの近接センサ18が両方反応する場合が考えられる。したがって、2つの近接センサ18が同時に反応した場合には、例えば番号の小さい近接センサ18が反応したとして計測結果を出力するようにすればよい。
【0043】
図9に示す電車線2の測定結果からは、0〜0.5km、1.5〜2km等においては反応する近接センサ18が順番に移動するため、正常に電車線2が敷設されているが、0.5〜1.5kmにおいては反応する近接センサ18が順番に移動しないため、電車線2の敷設に異常がある可能性があることが分かる。横軸は走行距離と電車線の位置が関連付けられているため、不具合箇所を一目で認識することができる。
【0044】
本実施の形態によれば、カメラ等を用いず、センサで電車線を直接検知するため、安価で正確な電車線位置計測装置を提供することができる。また、センサの出力をそのまま計測結果とできるため、データ処理時の演算を単純化することができる。
【0045】
なお、本実施の形態では、同じ時刻における近接センサ18の検出結果と走行距離と関連付けたものを電車線2の計測結果として出力したが、検査用車両10を略一定の速度で走行させるのであれば時刻毎の近接センサ18の検出結果をそのまま電車線2の計測結果として出力してもよい。
【0046】
また、本実施の形態では、パンタグラフ14を検査用車両10に取り付けたが、通常のモノレール用の車両に車速センサ11、演算装置13等とともにパンタグラフ14を配設するようにしてもよい。
【0047】
<第2の実施の形態>
第1の実施の形態は、近接センサの出力をそのまま電車線2の位置としたが、軌道桁1の製造誤差等により近接センサ18の出力と電車線2の位置とが異なることも考えられる。
【0048】
本発明の第2の実施の形態は、軌道桁1の位置を測定し、その測定結果に基づいて近接センサ18の検出結果を補正して電車線2の位置を計測する形態である。この補正は演算装置13によって行われる。なお、第1の実施の形態と同一の部分については、説明を省略する。
【0049】
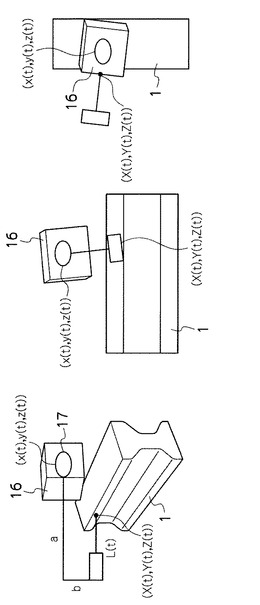
検査用車両10はジャイロセンサ12を中心に回転するため、図10に示すように、ジャイロセンサ12とレーザ式変位計16との相対的な位置関係(a,b)は不変である。なお、aはジャイロセンサ12とレーザ式変位計16との鉛直方向の距離であり、bはジャイロセンサ12とレーザ式変位計16との水平方向の距離である。
【0050】
したがって、レーザ式変位計16が計測している軌道桁1の座標(X(t),Y(t),z(t))は、数式3により求められる。なお、数式3において、L(t)はある時刻tにおけるレーザ式変位計16と軌道桁1との水平方向の距離である。
【0051】
[数3]
X(t)=x(t)+(cosRxsinRysinRz-sinRxcosRz)(a-L(t))+(cosRxsinRycosRz+sinRxsinRz)b
Y(t)=y(t)+(sinRxsinRysinRz+cosRxcosRz)(a-L(t))+(sinRxsinRycosRz-cosRxsinRz)b
Z(t)=z(t)+cosRysinRz(a-L(t))+cosRycosRzb
このようにして、演算装置13は、算出されたある時刻tにおける軌道桁1のz方向の位置と、ある時刻tにおける理論上の軌道桁1のz方向の位置との差(以下、z方向誤差という)を算出する。これにより、検査用車両10の変位を検出することができる。
【0052】
演算装置13は、算出されたz方向誤差、すなわち検査用車両10の変位を用いて近接センサ18の検出位置を補正する。2番の近接センサ18が反応し、z方向誤差が+方向に19mmであった場合を例に補正処理を説明する。
【0053】
z方向誤差が+方向に19mmの場合には、電車線2の実際の位置より‐方向に19mmの位置にある近接センサ18で電車線2が検出される。近接センサ18の検出範囲の重なりが1mmであるため、z方向誤差がない場合には、2番の近接センサ18の+19mmの位置にある近接センサ、すなわち1番の近接センサ18で電車線2が検出されるはずであったことが分かる。したがって、演算装置13は、近接センサ18の検出位置の補正結果として、電車線2は1番の近接センサ18で検出されたとして演算装置13のメモリ(図示せず)に記憶する。
【0054】
演算装置13は、近接センサ18の検出位置の補正結果と時刻とを関連付けて演算装置13内のメモリ(図示せず)に記憶する。また、演算装置13内のメモリ(図示せず)には、ある時刻における走行距離と近接センサ18の検出結果とを関連付けて記憶されている。したがって、演算装置13は、同じ時刻における近接センサ18の検出位置の補正結果と走行距離と関連付け、それを電車線2の計測結果として出力する。
【0055】
本実施の形態によれば、電車線の位置をより正確に計測することができる。
【0056】
なお、第1、第2の実施の形態では、跨座式モノレールについて説明したが、これに限定されるものではなく、懸垂式モノレールにも適用可能である。
【符号の説明】
【0057】
1:軌道桁、2:電車線、10:検査用車両、11:車速センサ、12:ジャイロセンサ、13:演算装置、14:パンタグラフ、15:超音波式変位計、16:レーザ式変位計、17:弾性部材、18:近接センサ
【技術分野】
【0001】
本発明は、モノレールや電気鉄道などの軌道に沿って、車輌に電力を供給するために設置される電車線における点検作業に関し、特に敷設時に電車線の位置を計測するための技術に関する。
【背景技術】
【0002】
特許文献1には、パンタグラフと電車線との接触位置をカメラ等で撮影して電車線の離線を検知する技術が開示されている。
【0003】
特許文献2には、近接センサの信号をトリガーにしてカメラで画像を撮影し、トロリー線の位置を測定する技術が開示されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2007−288893号公報
【特許文献2】特開2006−282128号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、特許文献1、2に記載の発明においては、電車線等をカメラで撮影する必要があり、装置が高価となるという問題がある。また、画像処理を用いるため、誤検知の恐れがある。
【0006】
本発明はこのような事情に鑑みてなされたもので、安価で正確な電車線位置計測装置を提供することを目的とする。
【課題を解決するための手段】
【0007】
請求項1に記載の電車線位置計測装置は、電車線に当接するように車両に配設されたパンタグラフと、検出面の前面に前記電車線が存在することを検出する複数の検出センサであって、前記検出面が前記電車線に対向するように、かつ前記検出面が前記当接面と平行方向及び前記電車線の敷設方向に対して略直交方向に並んだ状態で前記パンタグラフに配設された複数の近接センサと、を備えたことを特徴とする。
【0008】
請求項1に記載の電車線位置計測装置によれば、車両にパンタグラフが配設され、パンタグラフの検出面の前面に前記電車線が存在することを検出する複数の近接センサが配設される。パンタグラフは、電車線に当接するよう、かつ電車線と当接する面(以下、当接面という)が電車線の付設方向と略平行となるように配設されている。複数の検出センサは、検出面が前記電車線に対向するように、かつ検出面が前記当接面と平行方向及び電車線の敷設方向に対して略直交方向に並んだ状態で配設される。これにより、一定の範囲内に敷設された電車線を検出することができる。
【0009】
請求項2に記載の電車線位置計測装置は、請求項1に記載の電車線位置計測装置において、前記近接センサは、検出面が千鳥状に2次元配置されたことを特徴とする。
【0010】
請求項2に記載の電車線位置計測装置によれば、近接センサの検出面が千鳥状に2次元配置されるため、近接センサの検出範囲は近接センサの外径より小さい場合においても、電車線が敷設される一定の範囲内で、電車線の検出ができない範囲がないようにすることができる。
【0011】
請求項3に記載の電車線位置計測装置は、請求項1又は2に記載の電車線位置計測装置において、前記近接センサは、前記当接面より磨耗代だけ奥側に前記検出面が位置するように配設されることを特徴とする。
【0012】
請求項3に記載の電車線位置計測装置によれば、当接面より磨耗代だけ奥側に検出面が位置するように近接センサが配設されるため、検出面が電車線に接触することを防止することができる。
【0013】
請求項4に記載の電車線位置計測装置は、請求項1、2又は3に記載の電車線位置計測装置において、前記検出センサは、金属のみを検出可能な非接触センサであることを特徴とする。
【0014】
請求項4に記載の電車線位置計測装置によれば、金属のみを検出可能な非接触センサを用いるため、電車線のみを確実に検出することができる。
【0015】
請求項5に記載の電車線位置計測装置は、請求項1から4のいずれかに記載の電車線位置計測装置において、前記車両は、電車線からの電力供給無しに自走可能な検査用車両であり、前記パンタグラフは、非導電性の材料で形成されることを特徴とする。
【0016】
請求項5に記載の電車線位置計測装置によれば、パンタグラフが非導電性の材料で形成されるため、パンタグラフにより電車線が傷つくことを防止することができる。
【0017】
請求項6に記載の電車線位置計測装置は、請求項1から5のいずれかに記載の電車線位置計測装置において、前記複数の近接センサのうちの前面に前記電車線が存在することを検出した近接センサを示す近接センサ検出情報を前記電車線の位置の計測結果として出力する出力手段を備えたことを特徴とする。
【0018】
請求項6に記載の電車線位置計測装置によれば、複数の近接センサのうちの前面に電車線が存在することを検出した近接センサを示す近接センサ検出情報を電車線の位置の計測結果として出力するため、複雑な処理をすることなく電車線の位置を計測可能である。
【0019】
請求項7に記載の電車線位置計測装置は、請求項6に記載の電車線位置計測装置において、前記車両の速度を測定する速度測定手段と、前記速度測定手段の測定結果に基づいて前記車両の走行距離を算出する走行距離算出手段と、を備え、前記出力手段は、前記近接センサ検出情報と、前記走行距離とを関連付けて出力することを特徴とする。
【0020】
請求項7に記載の電車線位置計測装置によれば、近接センサ検出情報と走行距離とを関連付けたものを電車線の位置の計測結果として出力するため、不具合箇所を一目で認識することができる。
【0021】
請求項8に記載の電車線位置計測装置は、請求項6又は7に記載の電車線位置計測装置において、前記車両の変位を検出する検出手段と、前記検出手段による検出結果を用いて前記近接センサ検出情報を補正する補正手段と、を備えたことを特徴とする。
【0022】
請求項8に記載の電車線位置計測装置によれば、車両の変位検出結果を用いて近接センサ検出情報を補正するため、電車線の位置をより正確に計測することができる。
【発明の効果】
【0023】
本発明によれば、安価で正確な電車線位置計測装置を提供することができる。
【図面の簡単な説明】
【0024】
【図1】跨座式モノレールの軌道桁及び軌道桁に沿って自走可能な検査用車両を示す模式図であり、(a)は正面図、(b)は側面図。
【図2】軌道桁の斜視図。
【図3】検査用車両の下部の詳細を示す模式図であり、(a)は正面図、(b)は平面図。
【図4】(a)はパンタグラフの正面図であり、(b)はパンタグラフの側面透視図。
【図5】近接センサの検出範囲を示す図。
【図6】検査用車両の移動に伴い反応する近接センサが変化する様子を説明する図。
【図7】車速センサで検出された速度から各軸の速度成分を算出する方法を説明する図であり、(a)は斜視図、(b)は側面図、(c)は平面図である。
【図8】走行距離の算出方法を説明する図。
【図9】4個の近接センサが2列に千鳥状に配設された場合の電車線の計測結果の一例。
【図10】軌道桁の位置測定方法を説明する図であり、(a)は斜視図、(b)は側面図、(c)は平面図である。
【発明を実施するための形態】
【0025】
以下、添付図面に従って本発明に係る電車線位置計測装置の実施の形態について説明する。
【0026】
<第1の実施の形態>
図1は本発明が適用される跨座式モノレールの軌道桁1及び軌道桁1に沿って自走可能な検査用車両10を示す模式図であり、(a)は正面図、(b)は側面図である。
【0027】
軌道桁1は、図2に示すように両側面に案内面凹凸1Aが形成され、案内面凹凸1A内に電車線2が敷設される。電車線2は、モノレール車両のパンタグラフの一部のみがすり減らないようにするため、案内面凹凸1A内を限度に上下方向(z方向)の位置を変えながら敷設される。なお、x方向はある地点(たとえば始点)における検査用車両10の進行方向(電車線2の付設方向)であり、y方向は軌道桁1を上から見たときのx方向と直交する方向であり、z方向はx方向と平行かつy方向と直交する方向である。
【0028】
検査用車両10は、敷設時及び敷設後の検査時に用いられる車両であり、底部に配設されたタイヤ10aを用いて軌道桁1の上を走行する。検査用車両10の内部には、主として、検査用車両を自走可能とする駆動手段(図示せず)と、位置補正及び走行距離取得に用いられる車速センサ11と、位置補正に用いられるジャイロセンサ12と、演算装置13とが配設される。ジャイロセンサ12は、検査用車両10の左右方向(y方向)、前後方向(x方向)の略中心近傍に配設される。なお、ジャイロセンサ12は本実施の形態では使用せず、後に詳述する近接センサ18の出力の補正処理で使用される。
【0029】
図3は、検査用車両10の下部の詳細を示す模式図であり、(a)は正面図、(b)は平面図である。図3では、模式的に検査用車両10をコの字状のフレームで示す。
【0030】
検査用車両10の底面下部側面内側上部には、軌道桁1の軌跡を計測するレーザ式変位計16が4か所配設される。検査用車両10の側面内側下部には、主として、パンタグラフ14と、超音波式変位計15が配設される。超音波式変位計15は、電車線2のy方向の位置を計測するのに用いられる。
【0031】
パンタグラフ14は、電車線2に所定の力で接触するように、弾性部材17を介して検査用車両10に配設される。検査用車両10は自走可能であるため、電車線2から電力供給を受ける必要はない。したがって、パンタグラフ14は、非導電性かつ銅製の電車線2より弱い素材、例えばアクリル、強化プラスチック等が用いられる。そのため、電車線2が傷つくことはない。
【0032】
パンタグラフ14には、近接センサ18が複数配設される。近接センサ18は、電車線2のz方向の位置を計測するのに用いられる。近接センサ18は、直径が略30mm程度の略円筒形の非接触センサであり、前面に検出面18aが配設される。近接センサ18の内部には検出コイル(図示せず)が配設されており、検出面18aから常時高周波磁界が発生している。金属が検出面18a近傍に接近すると、高周波磁界により金属中に誘導電流が流れ、熱損失が発生して高周波磁界の発振が減衰または停止することにより、検出面18aの前面に金属(本実施の形態では電車線2)が存在することを検出する。したがって、近接センサ18は金属のみを検出し、他の材料は検出しない。本実施の形態では、パンタグラフ14は、非導電性の素材で形成されるため、誤検出を防止することができる。
【0033】
図4(a)はパンタグラフ14の正面図であり、図4(b)はパンタグラフ14の側面透視図である。パンタグラフ14に丸孔を形成し、丸孔に近接センサ18を埋め込むことにより、複数の近接センサ18がパンタグラフ14に配設される。近接センサ18は、検出面18aが電車線2に対向するよう配設される。
【0034】
電車線2がz方向の一定の範囲内に配設されるため、近接センサ18は、図4(a)に示すように、z方向、すなわち電車線2の敷設方向に対して略直交方向に並んだ状態でパンタグラフ14に配設される。パンタグラフ14が電車線2より柔らかい材料で形成されているため、近接センサ18は、図4(b)に示すように、検出面18aがパンタグラフ14の電車線2と当接する面(以下、当接面という)14aと平行となり、かつ当接面14aから磨耗代(本実施の形態では略1mm)だけ奥に位置するように配設される。これにより、検出面18aが電車線2に接触することを防止することができる。
【0035】
図5は、近接センサ18の検出範囲を示す図であり、X方向は近接センサ18の径方向であり、Y方向は検出面18aに直行する方向、すなわち軸方向である。直径30mmの近接センサ18の中心位置をX方向に変化させた時に、電車線を検出可能なY方向距離をプロットしたものである。すなわち、プロットとX軸で囲まれる領域が検出可能エリアとなるが、その内の電車線を中心とした半径10mm、Y方向距離2mmの範囲を確実に検出するエリアに選定し、近接センサ18を複数配列するようにした。なお、Y方向の検出距離は、パンタグラフ14の磨耗代(略1mm)を考慮してある。
【0036】
このように、使用可能な検出範囲は、近接センサ18の外径(略30mm)より小さくなる。そのため、図4(a)に示すように、近接センサ18は、隣接する近接センサ18の検出範囲が接する又は重なるように、検出面18aが千鳥状に2次元配置される。本実施の形態では、検出範囲が略1mm重なるように近接センサ18が配設される。これにより、電車線2が敷設される範囲(本実施の形態では略120mm)の範囲内で、電車線2の検出ができない範囲がないようにすることができる。
【0037】
電車線2の計測は、検査用車両10を自走させながら行われる。近接センサ18で電車線2が検出されるが、図6に示すように、検査用車両10の移動に伴い反応する近接センサ18が変化する。なお、図6では、わかりやすくするため、8個の近接センサ18が千鳥状に2次元配置された場合における1列分の近接センサ18のみを示す。図6においては、まず、番号1の近接センサ18が反応し、検査用車両10が移動すると次に番号2の近接センサ18が反応する。検査用車両10の移動に伴い、番号3、番号4、番号3・・・の近接センサ18が順に反応する。したがって、複数配設された近接センサ18のうちのどの近接センサ18が電車線2を検出したかという情報(以下、近接センサ18の検出結果という)を取得することにより、電車線2のz方向の位置を計測することができる。近接センサ18の検出結果は、演算装置13に入力される。演算装置13は、測定結果と時刻とを関連付けて演算装置13内のメモリ(図示せず)に記憶する。
【0038】
近接センサ18で電車線2のz方向の位置を検出するのと同時に、車速センサ11で検査用車両10の速度を検出する。検出結果は演算装置13に入力される。演算装置13は、車速センサ11で検出された速度を、図7に示すように3軸に分解し、数式1に基づいて各軸の速度成分を算出する。
【0039】
[数1]
vx=vcosRzcosRy
vy=vcosRzsinRy
vz=vsinRz
演算装置13は、各軸の速度成分に基づいて、ある時刻tにおけるジャイロセンサ12の座標(x(t), y(t),z(t))、すなわち検査用車両10の座標(x(t), y(t),z(t))を算出する。座標(x(t), y(t),z(t))は、図8及び数式2に示すように、速度と時間の積により求められる。
【0040】
[数2]
x(t)=Σvx△t=Σ( vcosRzcosRy)△t
y(t)= Σvy△t△t=Σ(vcosRzsinRy)△t
z(t)= Σ vz△t△t=Σ(vsinRz)△t
演算装置13は、座標(x(t), y(t))に基づいて検査用車両10の各時刻毎の走行距離を算出する。そして、演算装置13は、ある時刻における走行距離と近接センサ18の検出結果とを関連付けて、演算装置13内のメモリ(図示せず)に記憶する。
【0041】
演算装置13は、同じ時刻における近接センサ18の検出位置と走行距離と関連付け、それを電車線2の計測結果として出力する。出力結果は、図示しないモニタに表示されたり、図示しないメモリに記憶されたりする。図9は、4個の近接センサ18が2列に千鳥状に配設された場合の電車線2の計測結果の一例である。図9の横軸は走行距離であり、縦軸は反応した近接センサ18の番号、すなわち電車線2のz方向の位置である。近接センサ18の検出結果をそのまま電車線2の計測結果とできるため、複雑な処理をすることなく電車線2の位置を計測可能である。
【0042】
なお、本発明では図4に示すように千鳥状に近接センサ18が配設されているため、隣接する2つの近接センサ18が両方反応する場合が考えられる。したがって、2つの近接センサ18が同時に反応した場合には、例えば番号の小さい近接センサ18が反応したとして計測結果を出力するようにすればよい。
【0043】
図9に示す電車線2の測定結果からは、0〜0.5km、1.5〜2km等においては反応する近接センサ18が順番に移動するため、正常に電車線2が敷設されているが、0.5〜1.5kmにおいては反応する近接センサ18が順番に移動しないため、電車線2の敷設に異常がある可能性があることが分かる。横軸は走行距離と電車線の位置が関連付けられているため、不具合箇所を一目で認識することができる。
【0044】
本実施の形態によれば、カメラ等を用いず、センサで電車線を直接検知するため、安価で正確な電車線位置計測装置を提供することができる。また、センサの出力をそのまま計測結果とできるため、データ処理時の演算を単純化することができる。
【0045】
なお、本実施の形態では、同じ時刻における近接センサ18の検出結果と走行距離と関連付けたものを電車線2の計測結果として出力したが、検査用車両10を略一定の速度で走行させるのであれば時刻毎の近接センサ18の検出結果をそのまま電車線2の計測結果として出力してもよい。
【0046】
また、本実施の形態では、パンタグラフ14を検査用車両10に取り付けたが、通常のモノレール用の車両に車速センサ11、演算装置13等とともにパンタグラフ14を配設するようにしてもよい。
【0047】
<第2の実施の形態>
第1の実施の形態は、近接センサの出力をそのまま電車線2の位置としたが、軌道桁1の製造誤差等により近接センサ18の出力と電車線2の位置とが異なることも考えられる。
【0048】
本発明の第2の実施の形態は、軌道桁1の位置を測定し、その測定結果に基づいて近接センサ18の検出結果を補正して電車線2の位置を計測する形態である。この補正は演算装置13によって行われる。なお、第1の実施の形態と同一の部分については、説明を省略する。
【0049】
検査用車両10はジャイロセンサ12を中心に回転するため、図10に示すように、ジャイロセンサ12とレーザ式変位計16との相対的な位置関係(a,b)は不変である。なお、aはジャイロセンサ12とレーザ式変位計16との鉛直方向の距離であり、bはジャイロセンサ12とレーザ式変位計16との水平方向の距離である。
【0050】
したがって、レーザ式変位計16が計測している軌道桁1の座標(X(t),Y(t),z(t))は、数式3により求められる。なお、数式3において、L(t)はある時刻tにおけるレーザ式変位計16と軌道桁1との水平方向の距離である。
【0051】
[数3]
X(t)=x(t)+(cosRxsinRysinRz-sinRxcosRz)(a-L(t))+(cosRxsinRycosRz+sinRxsinRz)b
Y(t)=y(t)+(sinRxsinRysinRz+cosRxcosRz)(a-L(t))+(sinRxsinRycosRz-cosRxsinRz)b
Z(t)=z(t)+cosRysinRz(a-L(t))+cosRycosRzb
このようにして、演算装置13は、算出されたある時刻tにおける軌道桁1のz方向の位置と、ある時刻tにおける理論上の軌道桁1のz方向の位置との差(以下、z方向誤差という)を算出する。これにより、検査用車両10の変位を検出することができる。
【0052】
演算装置13は、算出されたz方向誤差、すなわち検査用車両10の変位を用いて近接センサ18の検出位置を補正する。2番の近接センサ18が反応し、z方向誤差が+方向に19mmであった場合を例に補正処理を説明する。
【0053】
z方向誤差が+方向に19mmの場合には、電車線2の実際の位置より‐方向に19mmの位置にある近接センサ18で電車線2が検出される。近接センサ18の検出範囲の重なりが1mmであるため、z方向誤差がない場合には、2番の近接センサ18の+19mmの位置にある近接センサ、すなわち1番の近接センサ18で電車線2が検出されるはずであったことが分かる。したがって、演算装置13は、近接センサ18の検出位置の補正結果として、電車線2は1番の近接センサ18で検出されたとして演算装置13のメモリ(図示せず)に記憶する。
【0054】
演算装置13は、近接センサ18の検出位置の補正結果と時刻とを関連付けて演算装置13内のメモリ(図示せず)に記憶する。また、演算装置13内のメモリ(図示せず)には、ある時刻における走行距離と近接センサ18の検出結果とを関連付けて記憶されている。したがって、演算装置13は、同じ時刻における近接センサ18の検出位置の補正結果と走行距離と関連付け、それを電車線2の計測結果として出力する。
【0055】
本実施の形態によれば、電車線の位置をより正確に計測することができる。
【0056】
なお、第1、第2の実施の形態では、跨座式モノレールについて説明したが、これに限定されるものではなく、懸垂式モノレールにも適用可能である。
【符号の説明】
【0057】
1:軌道桁、2:電車線、10:検査用車両、11:車速センサ、12:ジャイロセンサ、13:演算装置、14:パンタグラフ、15:超音波式変位計、16:レーザ式変位計、17:弾性部材、18:近接センサ
【特許請求の範囲】
【請求項1】
電車線に当接するように車両に配設されたパンタグラフと、
検出面の前面に前記電車線が存在することを検出する複数の検出センサであって、前記検出面が前記電車線に対向するように、かつ前記検出面が前記当接面と平行方向及び前記電車線の敷設方向に対して略直交方向に並んだ状態で前記パンタグラフに配設された複数の近接センサと、
を備えたことを特徴とする電車線位置計測装置。
【請求項2】
前記近接センサは、検出面が千鳥状に2次元配置されたことを特徴とする請求項1に記載の電車線位置計測装置。
【請求項3】
前記近接センサは、前記当接面より磨耗代だけ奥側に前記検出面が位置するように配設されることを特徴とする請求項1又は2に記載の電車線位置計測装置。
【請求項4】
前記検出センサは、金属のみを検出可能な非接触センサであることを特徴とする請求項1、2又は3に記載の電車線位置計測装置。
【請求項5】
前記車両は、電車線からの電力供給無しに自走可能な検査用車両であり、
前記パンタグラフは、非導電性の材料で形成されることを特徴とする請求項1から4のいずれかに記載の電車線位置計測装置。
【請求項6】
前記複数の近接センサのうちの前面に前記電車線が存在することを検出した近接センサ検出情報を前記電車線の位置の計測結果として出力する出力手段を備えたことを特徴とする請求項1から5のいずれかに記載の電車線位置計測装置。
【請求項7】
前記車両の速度を測定する速度測定手段と、
前記速度測定手段の測定結果に基づいて前記車両の走行距離を算出する走行距離算出手段と、を備え、
前記出力手段は、前記近接センサ検出情報と、前記走行距離とを関連付けて出力することを特徴とする請求項6に記載の電車線位置計測装置。
【請求項8】
前記車両の変位を検出する検出手段と、
前記検出手段による検出結果を用いて前記近接センサ検出情報を補正する補正手段と、
を備えたことを特徴とする請求項6又は7に記載の電車線位置計測装置。
【請求項1】
電車線に当接するように車両に配設されたパンタグラフと、
検出面の前面に前記電車線が存在することを検出する複数の検出センサであって、前記検出面が前記電車線に対向するように、かつ前記検出面が前記当接面と平行方向及び前記電車線の敷設方向に対して略直交方向に並んだ状態で前記パンタグラフに配設された複数の近接センサと、
を備えたことを特徴とする電車線位置計測装置。
【請求項2】
前記近接センサは、検出面が千鳥状に2次元配置されたことを特徴とする請求項1に記載の電車線位置計測装置。
【請求項3】
前記近接センサは、前記当接面より磨耗代だけ奥側に前記検出面が位置するように配設されることを特徴とする請求項1又は2に記載の電車線位置計測装置。
【請求項4】
前記検出センサは、金属のみを検出可能な非接触センサであることを特徴とする請求項1、2又は3に記載の電車線位置計測装置。
【請求項5】
前記車両は、電車線からの電力供給無しに自走可能な検査用車両であり、
前記パンタグラフは、非導電性の材料で形成されることを特徴とする請求項1から4のいずれかに記載の電車線位置計測装置。
【請求項6】
前記複数の近接センサのうちの前面に前記電車線が存在することを検出した近接センサ検出情報を前記電車線の位置の計測結果として出力する出力手段を備えたことを特徴とする請求項1から5のいずれかに記載の電車線位置計測装置。
【請求項7】
前記車両の速度を測定する速度測定手段と、
前記速度測定手段の測定結果に基づいて前記車両の走行距離を算出する走行距離算出手段と、を備え、
前記出力手段は、前記近接センサ検出情報と、前記走行距離とを関連付けて出力することを特徴とする請求項6に記載の電車線位置計測装置。
【請求項8】
前記車両の変位を検出する検出手段と、
前記検出手段による検出結果を用いて前記近接センサ検出情報を補正する補正手段と、
を備えたことを特徴とする請求項6又は7に記載の電車線位置計測装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2013−1329(P2013−1329A)
【公開日】平成25年1月7日(2013.1.7)
【国際特許分類】
【出願番号】特願2011−136598(P2011−136598)
【出願日】平成23年6月20日(2011.6.20)
【出願人】(000005452)株式会社日立プラントテクノロジー (1,767)
【Fターム(参考)】
【公開日】平成25年1月7日(2013.1.7)
【国際特許分類】
【出願日】平成23年6月20日(2011.6.20)
【出願人】(000005452)株式会社日立プラントテクノロジー (1,767)
【Fターム(参考)】
[ Back to top ]