
電離層遅延評価装置および航法装置
【課題】本発明は、衛星航法系において、誤差の要因となる電離層遅延を求める電離層遅延評価装置と、その電離層遅延評価装置またはこれに代わる装置との連係に必要なインタフェースの機能を有する航法装置とに関し、ハードウェアの規模が大幅に増加することなく、電離層遅延の補正を精度よく安定に実現できることを目的とする。
【解決手段】航行衛星から電離層を介して到来した受信波の占有帯域に含まれ、かつ帯域幅が異なる第一の帯域および第二の帯域における前記受信波の成分に基づいてそれぞれ求められた前記航行衛星の距離d1、d2の差Δdと、前記第一の帯域内の周波数f1および第二の帯域内の周波数f2とに基づいて、前記電離層の状態を推定する電離層状態推定手段と、前記航行衛星から前記受信波として到来し得る無線信号の周波数Fと前記電離層の状態とに基づいて、前記無線信号に前記電離層で生じた遅延を求める遅延算出手段とを備える。
【解決手段】航行衛星から電離層を介して到来した受信波の占有帯域に含まれ、かつ帯域幅が異なる第一の帯域および第二の帯域における前記受信波の成分に基づいてそれぞれ求められた前記航行衛星の距離d1、d2の差Δdと、前記第一の帯域内の周波数f1および第二の帯域内の周波数f2とに基づいて、前記電離層の状態を推定する電離層状態推定手段と、前記航行衛星から前記受信波として到来し得る無線信号の周波数Fと前記電離層の状態とに基づいて、前記無線信号に前記電離層で生じた遅延を求める遅延算出手段とを備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、衛星航法が適用された測位系や測距系において、測位や測距の誤差の要因となる電離層遅延を求める電離層遅延評価装置と、その電離層遅延評価装置またはこれに代わる装置との連係に必要なインタフェースの機能を有する航法装置とに関する。
【背景技術】
【0002】
GNSS受信機によって行われる測位の主要な誤差の要因には、GPS等の航行衛星から到来する受信波が伝搬する電離層においてその受信波に生じる遅延(以下、「電離層遅延」という。)がある。
【0003】
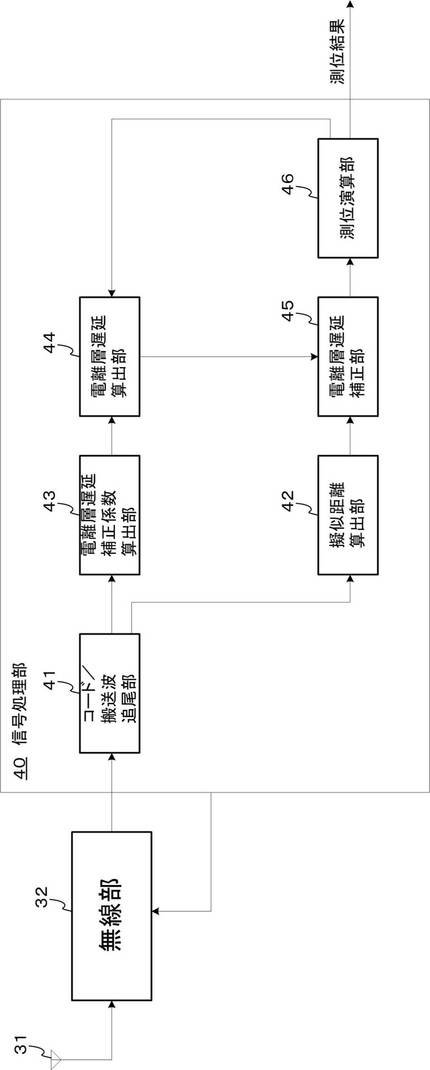
図4は、従来のGPS受信機の構成例を示す図である。
図において、GPS衛星(図示されない。)から無線信号が到来するアンテナ31の給電点には無線部32のアンテナ端子が接続され、その無線部32の出力は信号処理部40の対応するアナログポートに接続される。信号処理部40の第一の出力は無線部32の局発入力に接続され、その信号処理部40の第二の出力には上記GPS衛星の位置(以下、「衛星位置」という。)、速度、加速度の全てまたは一部(以下、「測位結果」という。)が出力される。
【0004】
信号処理部40には、その信号処理部40によって実行される以下のソフトウェアが組み込まれる。
(1) コード/搬送波追尾部41
(2) 擬似距離算出部42
(3) 電離層遅延補正係数算出部43
(4) 電離層遅延算出部44
(5) 電離層遅延補正部45
(6) 測位演算部46
【0005】
このような構成のGPS受信機では、無線部32は、GPS衛星からアンテナ31に到来した受信波を取り込み、信号処理部40によって与えられる局発信号に基づいてこれらの受信波をヘテロダイン検波することにより中間周波信号を生成し、その中間周波信号をA/D変換することにより、ディジタル信号を生成する。
【0006】
信号処理部40に組み込まれた既述のソフトウエアは、以下の通りに連係する。
(1) コード/搬送波追尾部41は、以下の処理を行う。
1) 上記ディジタル信号を復調することにより、アルマナック(軌道上の全てのGPS衛星の大まかな軌道情報を含む。)と、エフェメリス(受信波の送信元であるGPS衛星のクロック補正係数および軌道情報を含む。)とを取得する。
【0007】
2) 所定のアルゴリズムに基づいて各GPS衛星を順次選択し、選択された個々のGPS衛星について、受信波のドプラシフトを推定し、そのドップラシフトの中心値を含む所定の周波数帯域において受信波との相関をとる。
【0008】
3) 並行してGPS衛星から受信され得るL1C/Aコードの内、該当するGPS衛星から受信されたL1C/Aコードとの相関が最大となる周波数と、L1C/Aコードの位相とを検出してGPS衛星を捕捉する。
4) 何れのGPS衛星についても、捕捉した後には、搬送波とL1C/Aコードの位相との追尾を継続して行う。
【0009】
(2) 擬似距離算出部42は、以下の処理を行う。
1) GPS衛星から受信されたL1C/Aコードの位相を測定することにより、受信波が送信された時刻(以下、「送信時刻」という。)を求める。
【0010】
2) 「信号処理部40に内蔵された時計(以下、「内蔵時計」という。)が与える時刻」の上記「送信時刻」に対する偏差を該当するGPS衛星から到来する受信波の伝搬所要時間Tとして求める。
3) この伝搬所要時間Tと上記受信波の伝搬速度の公称値Cとの積として、GPS衛星の擬似距離を求める。
【0011】
(3) 電離層遅延補正係数算出部43は、以下の処理を行う。
1) 既述のアルマナックに含まれる係数(電離層遅延の振幅および周期をそれぞれ近似する3次式の各項に対応する。)α0〜3、β0〜β3に併せて、上記エフェメリスに含まれる衛星内部の遅延誤差tgd等のパラメータを取得する。
【0012】
2) これらのパラメータに基づいて所定の算術演算を行うことにより、その位置におけるGPS衛星の仰角E、方位角Aに併せて、以下の値を算出する。
a) 受信点が電離層を通過する点(以下、「電離層通過点」という。)の地球上における緯度φi
b) 電離層通過点の地球上における経度λi
c) 仮想的な電離層通過点の地球上における緯度φm(=φi+0.064cos(λi−1.617))
d) 地球の中心に対するGPS受信機および上記電離層通過点の角度Ψ
【0013】
(4) 電離層遅延算出部44は、既述パラメータおよび値、ならびにGPS受信機の位置の緯度φuおよび経度λu(後述するように測位演算部46によって先行して求められる。)に基づいて、電離層遅延の振幅と周期とをそれぞれ示す近似値AMP(=α0・φm0+α1・φm1+α2・φm2+α3・φm3)と、PER(=β0・φm0+β1・φm1+β2・φm2+β3・φm3)とを算出する。
【0014】
(5) 電離層遅延補正部45は、既述の通りに擬似距離算出部42によって求められたGPS衛星の擬似距離から、上記近似値AMP、PERで与えられる電離層遅延Tionoに相当する距離Dionoを減じることにより、その擬似距離を補正する。
【0015】
(6) 測位演算部46は、以下の処理を行う。
1) 地球の中心を原点とする3次元座標系における個々のGPS衛星の衛星位置を既述のエフェメリスに基づいて求める。
2) これらのGPS衛星の内、4個以上のGPS衛星について、上記「送信時刻」における「衛星位置」および「擬似距離」に対して成立する連立方程式の解として、地球上における受信機の位置(X,Y,Z)と、その受信機の「内蔵時計」が与える時刻の偏差とを求め、これらの位置および偏差を測位結果として出力する。
【0016】
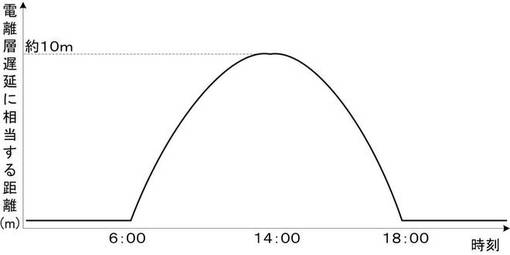
なお、上述した電離層遅延Tionoは、一般に、受信波が到来する方向の仰角が低いほど大きく、かつその仰角が天頂方向である場合に概ね10メートル程度の最大値となる。
【0017】
また、このような天頂方向における電離層遅延は、一般に、GPS衛星から到来する受信波の伝搬路に介在する電離層の電子密度が時間帯によって変化し、例えば、図5に示すように、18時ないし6時の夜間に最小となり、概ね14時頃に最大の10メートルとなる。
以下では、このような構成のGPS受信機を「第一の従来例」という。
【0018】
一方、軍用のGPS受信機、あるいは民生用の高価なGPS受信機(以下、「第二の従来例」という。)は、2つの周波数(例えば、既述のL1:1575.42MHzおよびL2:1227.6MHz)の受信波を受信し、これらの受信波の間における電離層遅延の差に基づいて、上記L1における電離層遅延を求めることにより、電離層遅延を補正する。
【0019】
なお、本発明に関連性がある先行技術としては、以下に列記する特許文献1ないし特許文献6がある。
(1) 「いずれも航法衛星から送信されそのうち2種類は互いにその搬送周波数が異なる少なくとも3種類の航法信号を受信する手段と、上記航法信号の内上記2種類を利用して、地球表面所定高度における電離層遅延係数分布に関するデータベースをリアルタイム更新する手段と、上記データベースを利用して電離層遅延を補償しながら、上記3種類の航法信号の内残りの少なくとも1種類を利用してかつ上記データベースの更新と並行して、上記航法信号の受信位置を演算する手段とを備える」ことにより、「高精度の測位を実現する」点に特徴がある衛星測位装置…特許文献1
【0020】
(2) 「測位用衛星から送信される測位用信号についての補正情報を、補正情報放送用衛星から受信する手段と、該補正情報に含まれている電離層遅延補正情報のうち、受信点の推定位置で利用可能な測位用衛星からの測位用信号が通過する電離層貫通点が存在する所定範囲の電離層遅延補正情報を記憶する電離層遅延補正情報記憶手段と、該電離層遅延補正情報記憶手段の内容に基づき、前記測位用信号を補正して測位を行う測位手段とを備える」ことにより、「SBAS衛星から放送される誤差補正情報を基に電源投入直後からディファレンシャル測位を可能とし、また小型化・低コスト化を可能とした」点に特徴があるディファレンシャル測位装置…特許文献2
【0021】
(3) 「航法支援衛星からの測位信号を受信し信号処理を行う観測局と、前記観測局から送信される処理済み又は未処理信号を基にして電離層遅延量の推定データを生成する中央局とを有する電離層遅延量推定システムであって、前記観測局は地上に設置された地上局と海上滞留体を用いて海上に設置された海上局とから構成され、前記地上局と前記海上局とで上空を広範囲に覆う電離層内の総電子量を高解像度かつ高精度で計測する」ことにより、「GNSSの誤差源である電離層遅延量を広域にわたり高精度に推定する」点に特徴がある電離層遅延量推定システム…特許文献3
【0022】
(4) 「あらかじめ定められた所定間隔で配置された各IGP(Ionospheric Grid Point:電離層グリッドポイント)における電離層遅延量の補正情報を、あらかじめ定められた所定時間間隔ごとに放送する地上局からの情報を用いて、GPS測位情報を補正する電離層遅延補正方法において、前記IGPの空間的な配置位置を前記所定間隔よりも狭い間隔に配置して、各IGPにおける前記電離層遅延量の補正情報を放送する時間間隔を、前記所定時間間隔よりも長くする」ことにより、「情報量一定という条件下で、IGP(電離層グリッドポイント)の電離層遅延量の補正情報の送信方法を変更し、GPS測位精度を向上させる」点に特徴がある電離層遅延補正方法…特許文献4
【0023】
(5) 「所定の時間に同じ衛星を用いて算出した、GPSモデルによる電離層遅延量と2周波による電離層遅延量との差から、擬似距離の観測量に含まれる受信機固有の周波数間バイアスを算出する。そして、IFBを除去した擬似距離を使った2周波による電離層遅延量とGPSモデルによる電離層遅延量とから、これらの値のいずれかを選択、あるいは加重平均して測位演算時に使用する電離層遅延量を算出する」ことにより、「測位を行う時間帯や受信機から見える衛星の状況に応じて、GPSモデルによる電離層遅延量推定と、2周波による電離層遅延量推定とを混合して使用し、正確な電離層遅延量を算出する」点に特徴がある測位用演算装置及び電離層遅延量算出方法…特許文献5
【0024】
(6) 「電離層よりも高い高度に配置される測位信号送信装置から放射される測位信号のうち少なくとも2つを用いて、当該測位信号が前記電離層を通過することにより生じる電離層遅延量を算出し、この算出手段により算出される前記電離層遅延量に基づいて前記位置情報を補正する」ことにより、「複数の周波数帯を有効に利用でき、かつ測位システムの信頼性を高める」点に特徴がある測位システム…特許文献6
【先行技術文献】
【特許文献】
【0025】
【特許文献1】特開平10−54871号公報
【特許文献2】特開2004−37212号公報
【特許文献3】特開2007−127502号公報
【特許文献4】特開2007−171082号公報
【特許文献5】特開2007−187592号公報
【特許文献6】特許第4177726号公報
【発明の概要】
【発明が解決しようとする課題】
【0026】
ところで、上述した第一の従来例では、達成可能な電離層遅延の補正の精度は、一般に、高々50%ないし70%程度と低かった。
【0027】
また、第二の従来例では、既述の受信波L2は、本来的な用途が軍用であって、復調や復号化に必要な詳細な仕様が公開されていないために、民生用では十分な活用に制約が生じて「オープンスカイのようにSN比が良好である環境」でしか利用できず、かつ用途が限られるばかりか、2つの異なる周波数の受信波を並行して受信しなければならない。したがって、第二の従来例は、低廉化や小型化が阻まれ、実際には採用できない場合が多かった。
【0028】
本発明は、ハードウェアの規模が大幅に増加することなく、測位や測距の誤差の要因となる電離層遅延の補正を精度よく安定に実現できる伝送層遅延評価装置および航法装置を提供することを目的とする。
【課題を解決するための手段】
【0029】
請求項1に記載の発明では、電離層状態推定手段は、航行衛星から電離層を介して到来した受信波の占有帯域に含まれ、かつ帯域幅が異なる第一の帯域および第二の帯域における前記受信波の成分に基づいてそれぞれ求められた前記航行衛星の距離d1、d2の差Δdと、前記第一の帯域内の周波数f1および第二の帯域内の周波数f2とに基づいて、前記電離層の状態を推定する。遅延算出手段は、前記航行衛星から前記受信波として到来し得る無線信号の周波数Fと前記電離層の状態とに基づいて、前記無線信号に前記電離層で生じた遅延を求める。
【0030】
すなわち、複数の受信機が備えられなくても、航行衛星から到来した受信波の伝搬路に介在する電離層の状態が推定され、その状態に基づいて、共通の航行衛星から到来し、かつ周波数が所望の値Fである無線信号に電離層で生じた遅延が求められる。
【0031】
請求項2に記載の発明では、電離層状態推定手段は、航行衛星から電離層を介して到来した受信波の占有帯域に含まれ、かつ帯域幅が異なる第一の帯域および第二の帯域における前記受信波の搬送波成分の位相の差Δφと、前記第一の帯域内の周波数f1および第二の帯域内の周波数f2とに基づいて、前記電離層の状態を推定する。遅延算出手段は、前記航行衛星から前記受信波として到来し得る無線信号の周波数Fと前記電離層の状態とに基づいて、前記無線信号に前記電離層で生じた遅延を求める。
【0032】
すなわち、複数の受信機が備えられなくても、航行衛星から到来した受信波の伝搬路に介在する電離層の状態が推定され、その状態に基づいて、共通の航行衛星から到来し、かつ周波数が所望の値Fである無線信号にこの電離層で生じた遅延が求められる。
【0033】
請求項3に記載の発明では、請求項1または請求項2に記載の電離層遅延評価装置において、前記無線信号は、前記電離層の状態の推定に供された受信波と占有帯域が異なる。
【0034】
すなわち、電離層で生じた遅延の補正は、その補正の対象である電離層の状態の推定に供された受信波と周波数が異なる所望の無線信号に対して施される。
【0035】
請求項4に記載の発明では、航行衛星から電離層を介して到来した受信波に基づいて測位または測距を行う航法装置において、インターフェース手段は、前記受信波の占有帯域に含まれ、かつ帯域幅が異なる第一の帯域および第二の帯域における前記受信波の成分に基づいてそれぞれ求められた前記航行衛星の距離d1、d2、または前記距離d1、d2の差Δdを外部に引き渡す。
【0036】
すなわち、請求項1ないし請求項3の何れか一項に記載の電離層遅延評価装置が備えられない航法装置との連係により、本願発明に基づく電離層の遅延の補正が実現可能となる。
【0037】
請求項5に記載の発明では、航行衛星から電離層を介して到来した受信波に基づいて測位または測距を行う航法装置において、インターフェース手段は、前記受信波の占有帯域に含まれ、かつ帯域幅が異なる第一の帯域および第二の帯域にそれぞれ分布する前記受信波の搬送波成分の位相の差Δφを外部に引き渡す。
【0038】
すなわち、請求項1ないし請求項3の何れか一項に記載の電離層遅延評価装置が備えられない航行装置との連係により、本願発明に基づく電離層の遅延の補正が実現可能となる。
【発明の効果】
【0039】
本発明によれば、衛星航法による測位や測距の主な誤差の要因である電離層の遅延が安価に確度高く補正される。
また、本発明では、航行衛星から電離層を介して到来し得る受信波の周波数配置や変調方式の多様な形態に対する柔軟な適応が可能となる。
さらに、本発明では、既存の航法装置の活用に併せて、その航行装置による測位や測距の精度の向上が図られる。
したがって、多様な環境で稼働すべき多くの装置に対して、衛星航法に基づく測位や測距の適用の可能性が高められる。
【図面の簡単な説明】
【0040】
【図1】本発明の一実施形態を示す図である。
【図2】本実施形態の原理および動作を説明する図である。
【図3】本実施形態に適用可能な2つの帯域の組み合わせを示す図である。
【図4】従来のGPS受信機の構成例を示す図である。
【図5】時間帯に応じた電離層遅延の変化の一例を示す図である。
【発明を実施するための形態】
【0041】
以下、図面に基づいて本発明の実施形態について詳細に説明する。
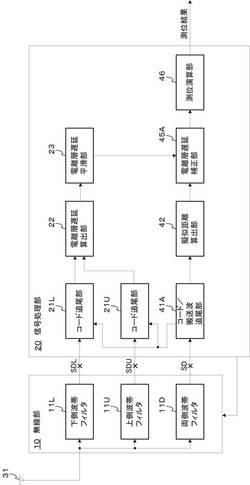
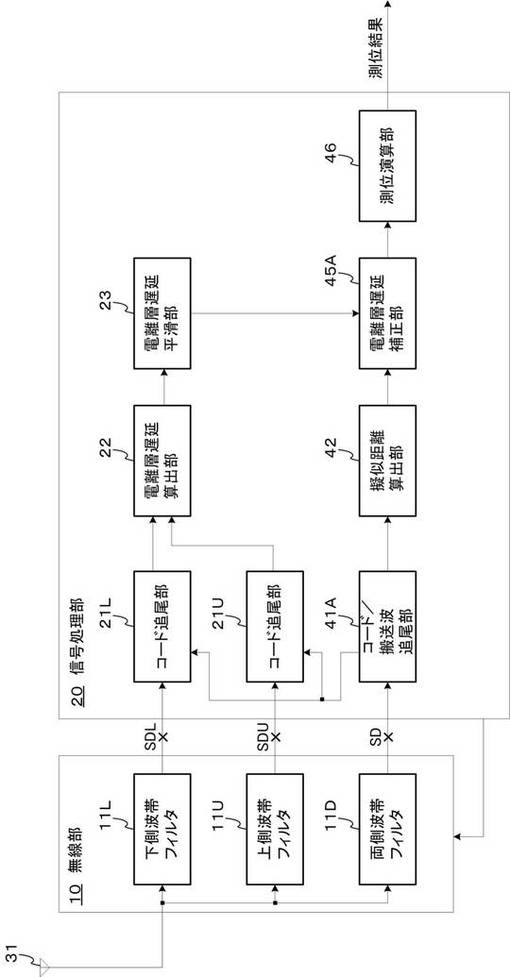
図1は、本発明の一実施形態を示す図である。
図において、図4に示すものと機能および構成が同じものについては、同じ符号を付与し、ここではその説明を省略する。
【0042】
本実施形態と図4に示す従来例との構成の相違点は、以下の点にある。
(1) 無線部32に代えて無線部10が備えられる。
(2) 信号処理部40に代えて信号処理部20が備えられる。
【0043】
無線部10は、アンテナ31の給電点に並列に接続された下側波帯フィルタ11L、上側波帯フィルタ11Uおよび両側波帯フィルタ11Dから構成される。
【0044】
信号処理部20の構成は、図4に示す信号処理部40の構成と以下の点で異なる。
(1) コード/搬送波追尾部41に代えてコード/搬送波追尾部41Aが備えられ、そのコード/搬送波追尾部41Aの入力には既述の両側波帯フィルタ11Dの出力が接続される。
(2) 電離層遅延補正部45に代えて電離層遅延補正部45Aが備えられる。
【0045】
(3) 上記下側波帯フィルタ11Lおよび上側波帯フィルタ11Uの出力にそれぞれ接続されたコード追尾部21L、21Uが備えられる。
(4) これらのコード追尾部21U、21Lの出力にそれぞれ接続された電離層遅延係数算出部22が電離層遅延補正係数算出部43に代えて備えられる。
(5) 電離層遅延算出部44に代えて電離層遅延平滑部23が備えられる。
【0046】
なお、上記コード/搬送波追尾部41A、コード追尾部21L、21U、電離層遅延算出部22および電離層遅延平滑部23は、信号処理部20に組み込まれ、その信号処理部20よって実行されるソフトウェアとして構成される。
【0047】
以下、本実施形態の原理を説明する。
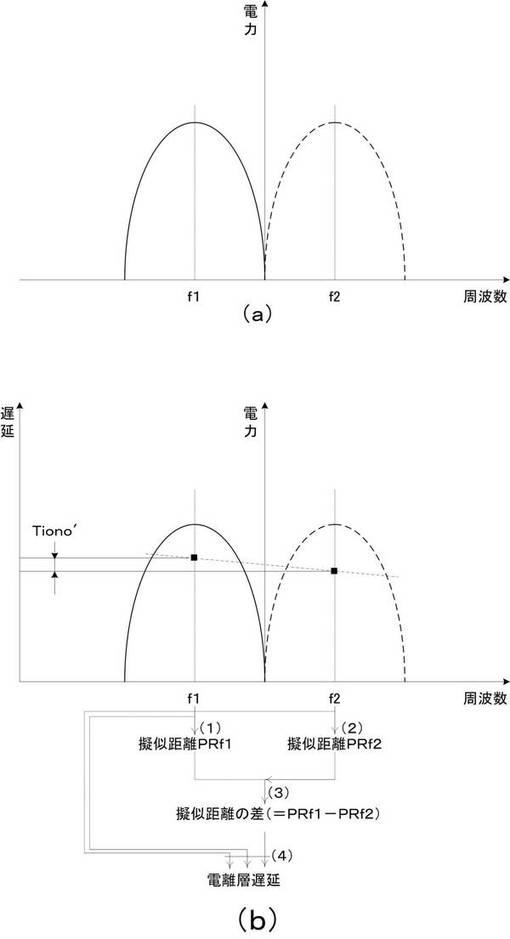
共通のGPS衛星から到来する受信波の周波数f1、f2の比の二乗値γ(=(f1/f2)2)と、これらの受信波に基づいてそれぞれ求められるGPS衛星の擬似距離PRf1、PRf2と、このように求められた擬似距離に電離層遅延に起因する誤差の補正が施されることによって得られる擬似距離PRとの間には、一般に、下式が成立する。
PR=(PRf2−γ・PRf1)/(1−γ)
【0048】
すなわち、周波数f1の受信波に生じる電離層遅延Tiono1 は、下式で与えられる。
Tiono1=PRf1−PR
=PRf1−{(PRf2−γPRf1)/(1−γ)}
=(PRf1−PRf2)/(1−γ)
【0049】
したがって、周波数がそれぞれf1、f2である受信波に個別に生じる電離層遅延の差ΔTは、下式で与えられる。
ΔT=PRf1−PRf2=(1−γ)(PRf1−PR) ・・・(1)
【0050】
ところで、所望の周波数Fの受信波に電離層で生じる電離層群遅延τ(F)は、一般に、その受信波が伝搬する電離層の領域における電子密度TEC[el/m2]と、伝搬速度Cととに対して、下式で与えられる。
τ(F)=[40.3/(C・F2)]・TEC ・・・(2)
【0051】
また、上述した擬似距離PRf1、PRf2は、該当するGPS衛星との間の距離Dに対して、それぞれ下式で与えられる。
PRf1=D+C・τ(f1) ・・・(3)
PRf2=D+C・τ(f2) ・・・(4)
【0052】
すなわち、これらの擬似距離PRf1、PRf2の差は、上式(2)〜(4)より、下式で与えられる。
PRf1−PRf2=C・(τ(f1)−τ(f2))
=40.3・TEC(1/f12−1/f22) ・・・(5)
【0053】
したがって、上記電子密度TECは、上式(5)より下式で与えられる。
TEC=(PRf1−PRf2)/{40.3・(1/f12−1/f22)} ・・・(6)
【0054】
以上を総合すると、所望の周波数Fの受信波に電離層で生じる電離層群遅延τ(F)は、上式(2)、(6)より下式で与えられる。
τ(F)=[40.3/(C・F2)]・(PRf1−PRf2)
/{40.3・(1/f12−1/f22)}
=(PRf1−PRf2)/{(1/f12−1/f22)・(C・F2)} ・・・(7)
=K・(PRf1−PRf2)/F2 ・・・(8)
K=1/{(1/f12−1/f22)・C} ・・・(9)
【0055】
図2は、本実施形態の原理および動作を説明する図である。
以下、図1ないし図2を参照して本実施形態の動作を上記原理に基づいて説明する。
なお、本実施形態では、本発明の作用効果がより顕著にかつ容易に得られる好適な実施形態とするため、GPS衛星から受信されるコードが既述の「L1C/Aコード」に代わる「L1Cコード」であると仮定する。
【0056】
本発明の特徴は、本実施形態では、従来例において既述の近似値AMP、PERに基づいて算出されていた電離層遅延Tionoに代わる電離層遅延Tiono′が以下の通りに求められ、かつ電離層遅延補正部45Aがその電離層遅延Tiono′に基づいて擬似距離を補正する点にある。
【0057】
下側波帯フィルタ11Lは、上記受信波の下側波帯(図2(a)に実線で示す。)の成分を抽出してヘテロダイン検波することにより中間周波信号SLを生成し、その中間周波信号SLをA/D変換することによりディジタル信号SDLを生成する。
【0058】
また、上側波帯フィルタ11Uは、GPS衛星から到来する受信波の上側波帯(図2(a)に点線で示す。)の成分を抽出してヘテロダイン検波することにより中間周波信号SUを生成し、その中間周波信号SUをA/D変換することによりディジタル信号SDUを生成する。
【0059】
なお、以下では、上記下側波帯および上側波帯の中心周波数は、図2(a)に示すように、それぞれf1、f2であると仮定する。
コード追尾部21Lは、以下の処理を行う。
【0060】
(1) 選択された個々のGPS衛星について、受信波(下側波帯)のドプラシフトを推定し、そのドップラシフトの中心値を含む所定の周波数帯域における受信波(下側波帯)との相関をとる。
【0061】
(2) 並行してGPS衛星から受信され得るL1Cコードの内、該当するGPS衛星から受信されたL1Cコードとの相関が最大となる周波数と、L1Cコードの位相とを検出してGPS衛星を捕捉する。
(3) 何れのGPS衛星についても、捕捉した後には、搬送波とL1Cコードの位相との追尾を継続して行う。
【0062】
(4) このようにしてGPS衛星から受信されるL1Cコードの位相を測定することにより、受信波が送信された時刻(以下、「送信時刻」という。)を求める。
(5) 「信号処理部20の内蔵時計(図示されない。)が与える時刻」の上記「送信時刻」に対する偏差を該当するGPS衛星から到来する下側波帯の伝搬所要時間T1として求める。
(6) この伝搬所要時間T1と上記側波帯(受信波)の伝搬速度の公称値cとの積として、既述の擬似距離PRf1を求める(図2(b)(1))。
【0063】
コード追尾部21Uは、上記ディジタル信号SDLに代わるディジタル信号SDUに、コード追尾部21Lによって行われる処理と同様の処理を施すことにより、上側波帯の伝搬所要時間T2を求め、その伝搬所要時間T2と上記公称値cとの積として既述の擬似距離PRf2を求める(図2(b)(2))。
【0064】
電離層遅延算出部22は、以下の値に基づいて上式(8) で示される算術演算を行うことにより、電離層群遅延τ(F)を求める(図2(3),(4))。
(1) 上式(9) で示される定数K
(2) GPS衛星から到来し、かつ測位に用いられるべき受信波の周波数F(=(f1+f2)/2)
(3) コード追尾部21L、21Uによってそれぞれ求められた擬似距離PRf1、PRf2
【0065】
電離層遅延平滑部23は、このようにして求められた電離層群遅延τ(F)の列を所定の時定数で時系列の順に平滑(例えば、「指数平滑法」に基づいて行われる。)することにより、その時定数より短い周期で変動する誤差の成分が抑圧された電離層遅延Tiono′を求める。
【0066】
一方、両側波帯11Dは、GPS衛星からアンテナ31に到来した受信波をヘテロダイン検波することにより中間周波信号Sを生成し、その中間周波信号SをA/D変換することにより、ディジタル信号SDを生成する。
【0067】
コード/搬送波追尾部41Aは、図4に示すコード/搬送波追尾部41によって行われる処理と同様の処理をコード追尾部21L、21Uと同期して行うことにより、各GPS衛星の選択、受信波のドプラシフトの推定およびGPS衛星の捕捉を行う。
【0068】
擬似距離算出部42は、このようなコード/搬送波追尾部41Aの配下で、図4に示す従来例と同様に、GPS衛星の擬似距離PRを求める。
【0069】
電離層遅延補正部45Aは、既述の通りに擬似距離算出部42によって求められたGPS衛星の擬似距離PRから、電離層遅延Tiono′に相当する距離Diono′(=c・Tiono′)を減じることにより、その擬似距離を補正する。
【0070】
なお、このような擬似距離の補正を実現するソフトウェアについては、本願が出願される時点においてこのような補正をディジタル信号処理として実現可能な信号処理系の一般的な処理能力によれば、演算対象の情報量や演算手順に対して十分な処理量の確保と、電離層遅延が変動し得る一般的な周期より大幅に高速な実行との何れもが可能である。
【0071】
すなわち、信号処理部20が「複数の受信機を備えることなく構成される無線部10」と連係して既述の処理を行うことにより、構成が大幅に複雑化することなく、かつ下表に示すように、GPS測位系の主要な誤差の要因である電離層遅延が精度よく安定に補正される。
【表1】

【0072】
したがって、本実施形態によれば、コストが大幅に増加することなく、測位や測距の精度が高められ、さらに、今後現用に供される可能性が高い広帯域の航行衛星、あるいはBOC(Binary
Offset Carrier) で変調された無線信号を送信する航行衛星による測位系に対して、柔軟かつ積極的な適応が可能となる。
【0073】
また、本実施形態によれば、既に広く普及しているカーナビ、PND(Portable
Navigation Device, Personal Navigation Device)、携帯電話端末等だけではなく、多様な環境下で稼働すべき多くの装置に対して衛星航法に基づく測位や測距の適用が可能となる。
【0074】
なお、本実施形態では、既述の周波数f1、f2は、GPS衛星から到来して受信波の下側波帯および上側波帯の中心周波数に設定されている。
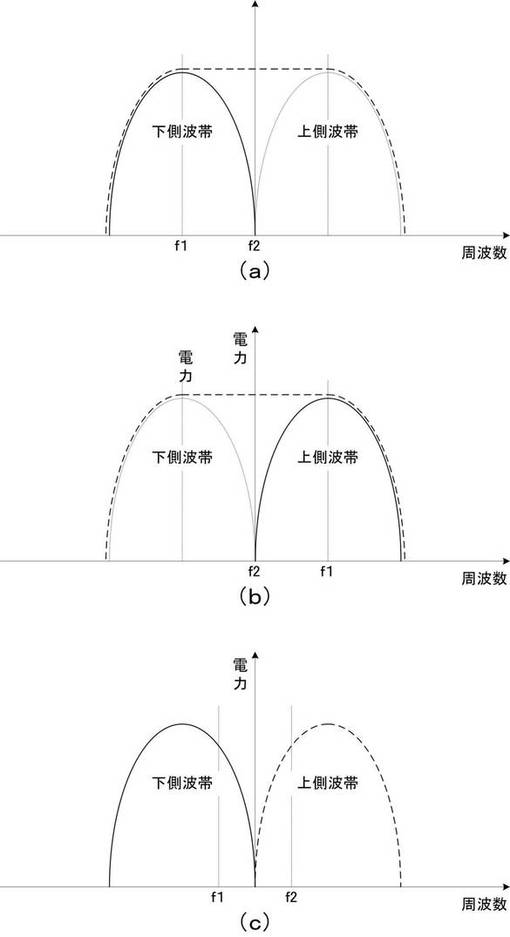
しかし、これらの周波数f1、f2は、共通のGPS衛星から並行して到来する2つの異なる受信波の周波数、あるいは1つの受信波の占有帯域に含まれる既知の周波数であるならば、以下に列記する何れの周波数であってもよい。
【0075】
(1) 「受信波の下側波帯と上側波帯との何れか一方の周波数f1」および「その受信波の占有帯域に含まれる搬送波周波数または所望の周波数f2(≠f1)」…図3(a)、(b)
(2) 受信波の占有帯域に含まれ、かつ本発明の適用に相応しい既知の2つの周波数f1、f2…図3(c)
【0076】
また、上記下側波帯および上側波帯は、該当する受信波が拡散符号との乗算による直接拡散、あるいは既述のBOCとの乗算との何れかによって生成される側波帯であってもよい。
さらに、本実施形態では、GPS衛星から到来し、かつ測位に用いられるべき受信波の周波数Fとして、その受信波の搬送波の周波数(=(f1+f2)/2)が適用されている。
【0077】
しかし、このような周波数Fは、例えば、以下の何れの周波数に設定されてもよい。
(1) 下側波帯のみが測位に供される場合:下側波帯の周波数f1
(2) 上側波帯のみが測位に供される場合:上側波帯の周波数f2
(3) 受信波の占有帯域の内、その受信波の生成に供される変調方式や多元接続方式に適合し、かつ測位に供される主要な成分が分布する占有帯域の中心周波数(搬送波周波数であってもよい。)
(4) 受信波とは別の共通のGPS衛星から到来して測位(測距)に供され、かつ占有帯域が上記擬似距離PRf1、PRf2の計測に供された受信波の占有帯域とは異なる無線信号の周波数(搬送波周波数でなくてもよい。)
【0078】
また、本実施形態では、上式(8) に含まれる項(PRf1−PRf2)が既述の下側波帯と上側波帯との搬送波位相差Δφと波長λとの積で代替されることにより、擬似距離PRf1、PRf2を求めるために行われるべき復調や復号化の省略や簡略化が図られてもよい。
【0079】
さらに、本実施形態では、電離層遅延の補正のために行われる処理については、既述の形態に限らず、所望の精度や応答性が達成されるならば、例えば、以下に列記する形態で実現され、あるいは演算対象や演算手順に如何なる変更が加えられてもよい。
【0080】
(1) 上式(8)、(9)の双方もしくは何れか一方に含まれる値が近似値で代替される。
(2) 上式(8)、(9)の双方もしくは何れか一方が近似式で代替される。
(3) 上式(8)、(9)の双方もしくは何れか一方の全てまたは一部の項が予め求められたテーブルのルックアップにより求められる。
【0081】
また、本実施形態では、既述の処理は、信号処理部20によって単独で行われている。
しかし、このような処理は、情報処理や信号処理を行う複数のプロセッサや専用のハードウェアに対して、如何なる形態で機能分散や負荷分散が図られてもよい。
【0082】
さらに、本発明は、図1に示すGPS受信機に予め組み込まれなくてもよく、例えば、以下の装置として構成されてもよい。
(1) 電離層遅延の補正を実現する処理(以下、「電離層遅延補正処理」という。)のために参照されるべき情報を引き渡すGPS受信機に組み込み可能に構成されたモジュール
(2) 電離層遅延補正処理のために参照されるべき情報を引き渡し、その電離層遅延補正処理の結果に基づいて測位誤差の圧縮を図るGPS受信機に組み込み可能に構成されたモジュール
【0083】
また、本発明は、GPS衛星だけではなく、例えば、構築や開発が進められているグロナス、ガリレオ、コンパスその他の多様な航行衛星が適用された測位系や測距系にも同様に適用可能である。
【0084】
さらに、本発明は、上述した実施形態に限定されず、本発明の範囲において多様な実施形態の構成が可能であり、構成要素の全てまたは一部に如何なる改良が施されてもよい。
【0085】
以下、本願に開示された発明の内、「特許請求の範囲」に記載しなかった発明の構成、作用および効果を「特許請求の範囲」および「課題を解決するための手段」の欄の記載に準じた様式で列記する。
【0086】
[請求項6] 請求項1に記載の電離層遅延評価装置において、
前記距離d1、d2は、
前記第一の帯域と前記第二の帯域とにおける前記受信波の個別の成分と、前記第一の帯域と前記第二の帯域とを介して受信されるべき前記受信波の個別の成分との相関に基づいて求められた
ことを特徴とする電離層遅延評価装置。
【0087】
このような構成の電離層遅延評価装置では、請求項1ないし請求項3の何れか1項に記載の電離層遅延評価装置において、前記距離d1、d2は、前記第一の帯域と前記第二の帯域とにおける前記受信波の個別の成分と、前記第一の帯域と前記第二の帯域とを介して受信されるべき前記受信波の個別の成分との相関に基づいて求められる。
【0088】
すなわち、電離層の状態の推定に供される距離d1、d2は、上記受信波の復調、信号判定、復号化の何れもが正規に行われなくても求められる。
【0089】
したがって、構成の複雑化、コストの増加および信頼性の低下の回避や緩和が図られる。
【0090】
[請求項7] 請求項1に記載の電離層遅延評価装置において、
前記第一の帯域と前記第二の帯域とにおける前記受信波の成分が個別に復調されることによって取得され、かつ前記航行衛星から送信された伝送情報に基づいて、前記距離d1、d2が求められる
ことを特徴とする電離層遅延評価装置。
【0091】
このような構成の電離層遅延評価装置では、請求項1ないし請求項3の何れか1項に記載の電離層遅延評価装置において、前記第一の帯域と前記第二の帯域とにおける前記受信波の成分が個別に復調されることによって取得され、かつ前記航行衛星から送信された伝送情報に基づいて、前記距離d1、d2が求められる。
【0092】
すなわち、電離層の状態の推定に供される距離d1、d2は、航行衛星から到来した受信波に本来的に適用されるべき航法の下で求められる。
【0093】
したがって、上記距離d1、d2を求めるための専用の構成要素の削減が図られ、コストの増加および信頼性の低下の回避や緩和が図られる。
【0094】
[請求項8] 請求項1、2、3、6、7の何れか1項に記載の電離層遅延評価装置において、
前記電離層の状態は、
前記電離層に分布する電子の密度である
ことを特徴とする電離層遅延評価装置。
【0095】
このような構成の電離層遅延評価装置では、前記電離層の状態は、前記電離層に分布する電子の密度である。
【0096】
すなわち、天頂方向から大幅に隔たった方向に位置する航行衛星から無線信号が到来する場合であっても、このような無線信号の伝搬路に介在する電離層の状態は、その電離層における群遅延を左右する主要な要因である電子の密度として推定される。
【0097】
したがって、異なる位置にある航行衛星から個別に到来する何れの無線信号についても、これらの無線信号が到来する地域の如何にかかわらず、それぞれの伝搬路に介在する電離層で生じた遅延が精度よく求められる。
【0098】
[請求項9] 請求項1、2、3、6、7、8の何れか1項に記載の電離層遅延評価装置において、
前記第一の帯域および前記第二の帯域は、
前記受信波が有する2つの側波帯の一方および他方である
ことを特徴とする電離層遅延評価装置。
【0099】
このような構成の電離層遅延評価装置では、請求項1、2、3、6、7、8の何れか1項に記載の電離層遅延評価装置において、前記第一の帯域および前記第二の帯域は、前記受信波が有する2つの側波帯の一方および他方である。
【0100】
すなわち、第一の帯域および第二の帯域は、航行衛星から到来する受信波の生成に適用された変調方式の下で本来的に形成される2つの帯域に設定される。
【0101】
したがって、航行衛星の距離d1、d2と、上記第一および第二の帯域における受信波の搬送波成分の位相の差Δφとの何れも、その受信波の復調、信号判定および復号化の何れかの処理の共用の下で、精度よく安定に求められる。
【0102】
[請求項10] 請求項1、2、3、6、7、8、9の何れか1項に記載の電離層遅延評価装置において、
前記第一の帯域と前記第二の帯域とにおける前記受信波の成分は、
前記受信波に基づく測位または測距に供される共通の情報で個別に変調されている
ことを特徴とする電離層遅延評価装置。
【0103】
このような構成の電離層遅延評価装置では、請求項1、2、3、6、7、8、9の何れか1項に記載の電離層遅延評価装置において、前記第一の帯域と前記第二の帯域とにおける前記受信波の成分は、前記受信波に基づく測位または測距に供される共通の情報で個別に変調されている。
【0104】
すなわち、航行衛星の距離d1、d2と、第一の帯域および第二の帯域における受信波の搬送波成分の位相の差Δφとの何れも、上記測位または測距に供される情報の取得に不要な処理を経ることなく得られる。
【0105】
したがって、構成の簡略化に併せて、コストの削減および信頼性の向上が図られる。
[請求項11] 請求項4に記載の航法装置において、
前記距離d1、d2または前記距離d1、d2の差Δdに基づいて求められ、かつ前記外部から引き渡された前記電離層の遅延に基づいて、前記測位または前記測距の誤差を補正する誤差補正手段を備えた
ことを特徴とする航法装置。
【0106】
このような構成の航法装置では、請求項4に記載の航法装置において、誤差補正手段は、前記距離d1、d2または前記距離d1、d2の差Δdに基づいて求められ、かつ前記外部から引き渡された前記電離層の遅延に基づいて、前記測位または前記測距の誤差を補正する。
【0107】
すなわち、請求項1または請求項3に記載の電離層遅延評価装置が備えられない航法装置をオプションとして搭載可能な航法装置が実現される。
【0108】
したがって、請求項1または請求項3に記載の電離層遅延評価装置の何れもが備えられない航法装置の活用が図られ、その航法装置による測位や測距の精度の向上が図られる。
【0109】
[請求項12] 請求項5に記載の航法装置において、
前記位相の差Δφに基づいて求められ、かつ前記外部から引き渡された前記電離層の遅延に基づいて、前記測位または前記測位の誤差を補正する誤差補正手段を備えた
ことを特徴とする航法装置。
【0110】
このような構成の航法装置では、請求項5に記載の航法装置において、誤差補正手段は、前記位相の差Δφに基づいて求められ、かつ前記外部から引き渡された前記電離層の遅延に基づいて、前記測位または前記測位の誤差を補正する。
【0111】
すなわち、請求項2に記載の電離層遅延評価装置が備えられない航法装置をオプションとして搭載可能な航法装置が実現される。
【0112】
したがって、請求項2に記載の電離層遅延評価装置の何れもが備えられない航法装置の活用が図られ、その航法装置による測位や測距の精度の向上が図られる。
【符号の説明】
【0113】
10,32 無線部
11D 両側波帯フィルタ
11L 下側波帯フィルタ
11U 上側波帯フィルタ
20,40 信号処理部
21L,21U コード追尾部
22 電離層遅延算出部
23 電離層遅延平滑部
31 アンテナ
41,41A コード/搬送波追尾部
42 擬似距離算出部
43 電離層遅延補正係数算出部
44 電離層遅延算出部
45,45A 電離層遅延補正部
46 測位演算部
【技術分野】
【0001】
本発明は、衛星航法が適用された測位系や測距系において、測位や測距の誤差の要因となる電離層遅延を求める電離層遅延評価装置と、その電離層遅延評価装置またはこれに代わる装置との連係に必要なインタフェースの機能を有する航法装置とに関する。
【背景技術】
【0002】
GNSS受信機によって行われる測位の主要な誤差の要因には、GPS等の航行衛星から到来する受信波が伝搬する電離層においてその受信波に生じる遅延(以下、「電離層遅延」という。)がある。
【0003】
図4は、従来のGPS受信機の構成例を示す図である。
図において、GPS衛星(図示されない。)から無線信号が到来するアンテナ31の給電点には無線部32のアンテナ端子が接続され、その無線部32の出力は信号処理部40の対応するアナログポートに接続される。信号処理部40の第一の出力は無線部32の局発入力に接続され、その信号処理部40の第二の出力には上記GPS衛星の位置(以下、「衛星位置」という。)、速度、加速度の全てまたは一部(以下、「測位結果」という。)が出力される。
【0004】
信号処理部40には、その信号処理部40によって実行される以下のソフトウェアが組み込まれる。
(1) コード/搬送波追尾部41
(2) 擬似距離算出部42
(3) 電離層遅延補正係数算出部43
(4) 電離層遅延算出部44
(5) 電離層遅延補正部45
(6) 測位演算部46
【0005】
このような構成のGPS受信機では、無線部32は、GPS衛星からアンテナ31に到来した受信波を取り込み、信号処理部40によって与えられる局発信号に基づいてこれらの受信波をヘテロダイン検波することにより中間周波信号を生成し、その中間周波信号をA/D変換することにより、ディジタル信号を生成する。
【0006】
信号処理部40に組み込まれた既述のソフトウエアは、以下の通りに連係する。
(1) コード/搬送波追尾部41は、以下の処理を行う。
1) 上記ディジタル信号を復調することにより、アルマナック(軌道上の全てのGPS衛星の大まかな軌道情報を含む。)と、エフェメリス(受信波の送信元であるGPS衛星のクロック補正係数および軌道情報を含む。)とを取得する。
【0007】
2) 所定のアルゴリズムに基づいて各GPS衛星を順次選択し、選択された個々のGPS衛星について、受信波のドプラシフトを推定し、そのドップラシフトの中心値を含む所定の周波数帯域において受信波との相関をとる。
【0008】
3) 並行してGPS衛星から受信され得るL1C/Aコードの内、該当するGPS衛星から受信されたL1C/Aコードとの相関が最大となる周波数と、L1C/Aコードの位相とを検出してGPS衛星を捕捉する。
4) 何れのGPS衛星についても、捕捉した後には、搬送波とL1C/Aコードの位相との追尾を継続して行う。
【0009】
(2) 擬似距離算出部42は、以下の処理を行う。
1) GPS衛星から受信されたL1C/Aコードの位相を測定することにより、受信波が送信された時刻(以下、「送信時刻」という。)を求める。
【0010】
2) 「信号処理部40に内蔵された時計(以下、「内蔵時計」という。)が与える時刻」の上記「送信時刻」に対する偏差を該当するGPS衛星から到来する受信波の伝搬所要時間Tとして求める。
3) この伝搬所要時間Tと上記受信波の伝搬速度の公称値Cとの積として、GPS衛星の擬似距離を求める。
【0011】
(3) 電離層遅延補正係数算出部43は、以下の処理を行う。
1) 既述のアルマナックに含まれる係数(電離層遅延の振幅および周期をそれぞれ近似する3次式の各項に対応する。)α0〜3、β0〜β3に併せて、上記エフェメリスに含まれる衛星内部の遅延誤差tgd等のパラメータを取得する。
【0012】
2) これらのパラメータに基づいて所定の算術演算を行うことにより、その位置におけるGPS衛星の仰角E、方位角Aに併せて、以下の値を算出する。
a) 受信点が電離層を通過する点(以下、「電離層通過点」という。)の地球上における緯度φi
b) 電離層通過点の地球上における経度λi
c) 仮想的な電離層通過点の地球上における緯度φm(=φi+0.064cos(λi−1.617))
d) 地球の中心に対するGPS受信機および上記電離層通過点の角度Ψ
【0013】
(4) 電離層遅延算出部44は、既述パラメータおよび値、ならびにGPS受信機の位置の緯度φuおよび経度λu(後述するように測位演算部46によって先行して求められる。)に基づいて、電離層遅延の振幅と周期とをそれぞれ示す近似値AMP(=α0・φm0+α1・φm1+α2・φm2+α3・φm3)と、PER(=β0・φm0+β1・φm1+β2・φm2+β3・φm3)とを算出する。
【0014】
(5) 電離層遅延補正部45は、既述の通りに擬似距離算出部42によって求められたGPS衛星の擬似距離から、上記近似値AMP、PERで与えられる電離層遅延Tionoに相当する距離Dionoを減じることにより、その擬似距離を補正する。
【0015】
(6) 測位演算部46は、以下の処理を行う。
1) 地球の中心を原点とする3次元座標系における個々のGPS衛星の衛星位置を既述のエフェメリスに基づいて求める。
2) これらのGPS衛星の内、4個以上のGPS衛星について、上記「送信時刻」における「衛星位置」および「擬似距離」に対して成立する連立方程式の解として、地球上における受信機の位置(X,Y,Z)と、その受信機の「内蔵時計」が与える時刻の偏差とを求め、これらの位置および偏差を測位結果として出力する。
【0016】
なお、上述した電離層遅延Tionoは、一般に、受信波が到来する方向の仰角が低いほど大きく、かつその仰角が天頂方向である場合に概ね10メートル程度の最大値となる。
【0017】
また、このような天頂方向における電離層遅延は、一般に、GPS衛星から到来する受信波の伝搬路に介在する電離層の電子密度が時間帯によって変化し、例えば、図5に示すように、18時ないし6時の夜間に最小となり、概ね14時頃に最大の10メートルとなる。
以下では、このような構成のGPS受信機を「第一の従来例」という。
【0018】
一方、軍用のGPS受信機、あるいは民生用の高価なGPS受信機(以下、「第二の従来例」という。)は、2つの周波数(例えば、既述のL1:1575.42MHzおよびL2:1227.6MHz)の受信波を受信し、これらの受信波の間における電離層遅延の差に基づいて、上記L1における電離層遅延を求めることにより、電離層遅延を補正する。
【0019】
なお、本発明に関連性がある先行技術としては、以下に列記する特許文献1ないし特許文献6がある。
(1) 「いずれも航法衛星から送信されそのうち2種類は互いにその搬送周波数が異なる少なくとも3種類の航法信号を受信する手段と、上記航法信号の内上記2種類を利用して、地球表面所定高度における電離層遅延係数分布に関するデータベースをリアルタイム更新する手段と、上記データベースを利用して電離層遅延を補償しながら、上記3種類の航法信号の内残りの少なくとも1種類を利用してかつ上記データベースの更新と並行して、上記航法信号の受信位置を演算する手段とを備える」ことにより、「高精度の測位を実現する」点に特徴がある衛星測位装置…特許文献1
【0020】
(2) 「測位用衛星から送信される測位用信号についての補正情報を、補正情報放送用衛星から受信する手段と、該補正情報に含まれている電離層遅延補正情報のうち、受信点の推定位置で利用可能な測位用衛星からの測位用信号が通過する電離層貫通点が存在する所定範囲の電離層遅延補正情報を記憶する電離層遅延補正情報記憶手段と、該電離層遅延補正情報記憶手段の内容に基づき、前記測位用信号を補正して測位を行う測位手段とを備える」ことにより、「SBAS衛星から放送される誤差補正情報を基に電源投入直後からディファレンシャル測位を可能とし、また小型化・低コスト化を可能とした」点に特徴があるディファレンシャル測位装置…特許文献2
【0021】
(3) 「航法支援衛星からの測位信号を受信し信号処理を行う観測局と、前記観測局から送信される処理済み又は未処理信号を基にして電離層遅延量の推定データを生成する中央局とを有する電離層遅延量推定システムであって、前記観測局は地上に設置された地上局と海上滞留体を用いて海上に設置された海上局とから構成され、前記地上局と前記海上局とで上空を広範囲に覆う電離層内の総電子量を高解像度かつ高精度で計測する」ことにより、「GNSSの誤差源である電離層遅延量を広域にわたり高精度に推定する」点に特徴がある電離層遅延量推定システム…特許文献3
【0022】
(4) 「あらかじめ定められた所定間隔で配置された各IGP(Ionospheric Grid Point:電離層グリッドポイント)における電離層遅延量の補正情報を、あらかじめ定められた所定時間間隔ごとに放送する地上局からの情報を用いて、GPS測位情報を補正する電離層遅延補正方法において、前記IGPの空間的な配置位置を前記所定間隔よりも狭い間隔に配置して、各IGPにおける前記電離層遅延量の補正情報を放送する時間間隔を、前記所定時間間隔よりも長くする」ことにより、「情報量一定という条件下で、IGP(電離層グリッドポイント)の電離層遅延量の補正情報の送信方法を変更し、GPS測位精度を向上させる」点に特徴がある電離層遅延補正方法…特許文献4
【0023】
(5) 「所定の時間に同じ衛星を用いて算出した、GPSモデルによる電離層遅延量と2周波による電離層遅延量との差から、擬似距離の観測量に含まれる受信機固有の周波数間バイアスを算出する。そして、IFBを除去した擬似距離を使った2周波による電離層遅延量とGPSモデルによる電離層遅延量とから、これらの値のいずれかを選択、あるいは加重平均して測位演算時に使用する電離層遅延量を算出する」ことにより、「測位を行う時間帯や受信機から見える衛星の状況に応じて、GPSモデルによる電離層遅延量推定と、2周波による電離層遅延量推定とを混合して使用し、正確な電離層遅延量を算出する」点に特徴がある測位用演算装置及び電離層遅延量算出方法…特許文献5
【0024】
(6) 「電離層よりも高い高度に配置される測位信号送信装置から放射される測位信号のうち少なくとも2つを用いて、当該測位信号が前記電離層を通過することにより生じる電離層遅延量を算出し、この算出手段により算出される前記電離層遅延量に基づいて前記位置情報を補正する」ことにより、「複数の周波数帯を有効に利用でき、かつ測位システムの信頼性を高める」点に特徴がある測位システム…特許文献6
【先行技術文献】
【特許文献】
【0025】
【特許文献1】特開平10−54871号公報
【特許文献2】特開2004−37212号公報
【特許文献3】特開2007−127502号公報
【特許文献4】特開2007−171082号公報
【特許文献5】特開2007−187592号公報
【特許文献6】特許第4177726号公報
【発明の概要】
【発明が解決しようとする課題】
【0026】
ところで、上述した第一の従来例では、達成可能な電離層遅延の補正の精度は、一般に、高々50%ないし70%程度と低かった。
【0027】
また、第二の従来例では、既述の受信波L2は、本来的な用途が軍用であって、復調や復号化に必要な詳細な仕様が公開されていないために、民生用では十分な活用に制約が生じて「オープンスカイのようにSN比が良好である環境」でしか利用できず、かつ用途が限られるばかりか、2つの異なる周波数の受信波を並行して受信しなければならない。したがって、第二の従来例は、低廉化や小型化が阻まれ、実際には採用できない場合が多かった。
【0028】
本発明は、ハードウェアの規模が大幅に増加することなく、測位や測距の誤差の要因となる電離層遅延の補正を精度よく安定に実現できる伝送層遅延評価装置および航法装置を提供することを目的とする。
【課題を解決するための手段】
【0029】
請求項1に記載の発明では、電離層状態推定手段は、航行衛星から電離層を介して到来した受信波の占有帯域に含まれ、かつ帯域幅が異なる第一の帯域および第二の帯域における前記受信波の成分に基づいてそれぞれ求められた前記航行衛星の距離d1、d2の差Δdと、前記第一の帯域内の周波数f1および第二の帯域内の周波数f2とに基づいて、前記電離層の状態を推定する。遅延算出手段は、前記航行衛星から前記受信波として到来し得る無線信号の周波数Fと前記電離層の状態とに基づいて、前記無線信号に前記電離層で生じた遅延を求める。
【0030】
すなわち、複数の受信機が備えられなくても、航行衛星から到来した受信波の伝搬路に介在する電離層の状態が推定され、その状態に基づいて、共通の航行衛星から到来し、かつ周波数が所望の値Fである無線信号に電離層で生じた遅延が求められる。
【0031】
請求項2に記載の発明では、電離層状態推定手段は、航行衛星から電離層を介して到来した受信波の占有帯域に含まれ、かつ帯域幅が異なる第一の帯域および第二の帯域における前記受信波の搬送波成分の位相の差Δφと、前記第一の帯域内の周波数f1および第二の帯域内の周波数f2とに基づいて、前記電離層の状態を推定する。遅延算出手段は、前記航行衛星から前記受信波として到来し得る無線信号の周波数Fと前記電離層の状態とに基づいて、前記無線信号に前記電離層で生じた遅延を求める。
【0032】
すなわち、複数の受信機が備えられなくても、航行衛星から到来した受信波の伝搬路に介在する電離層の状態が推定され、その状態に基づいて、共通の航行衛星から到来し、かつ周波数が所望の値Fである無線信号にこの電離層で生じた遅延が求められる。
【0033】
請求項3に記載の発明では、請求項1または請求項2に記載の電離層遅延評価装置において、前記無線信号は、前記電離層の状態の推定に供された受信波と占有帯域が異なる。
【0034】
すなわち、電離層で生じた遅延の補正は、その補正の対象である電離層の状態の推定に供された受信波と周波数が異なる所望の無線信号に対して施される。
【0035】
請求項4に記載の発明では、航行衛星から電離層を介して到来した受信波に基づいて測位または測距を行う航法装置において、インターフェース手段は、前記受信波の占有帯域に含まれ、かつ帯域幅が異なる第一の帯域および第二の帯域における前記受信波の成分に基づいてそれぞれ求められた前記航行衛星の距離d1、d2、または前記距離d1、d2の差Δdを外部に引き渡す。
【0036】
すなわち、請求項1ないし請求項3の何れか一項に記載の電離層遅延評価装置が備えられない航法装置との連係により、本願発明に基づく電離層の遅延の補正が実現可能となる。
【0037】
請求項5に記載の発明では、航行衛星から電離層を介して到来した受信波に基づいて測位または測距を行う航法装置において、インターフェース手段は、前記受信波の占有帯域に含まれ、かつ帯域幅が異なる第一の帯域および第二の帯域にそれぞれ分布する前記受信波の搬送波成分の位相の差Δφを外部に引き渡す。
【0038】
すなわち、請求項1ないし請求項3の何れか一項に記載の電離層遅延評価装置が備えられない航行装置との連係により、本願発明に基づく電離層の遅延の補正が実現可能となる。
【発明の効果】
【0039】
本発明によれば、衛星航法による測位や測距の主な誤差の要因である電離層の遅延が安価に確度高く補正される。
また、本発明では、航行衛星から電離層を介して到来し得る受信波の周波数配置や変調方式の多様な形態に対する柔軟な適応が可能となる。
さらに、本発明では、既存の航法装置の活用に併せて、その航行装置による測位や測距の精度の向上が図られる。
したがって、多様な環境で稼働すべき多くの装置に対して、衛星航法に基づく測位や測距の適用の可能性が高められる。
【図面の簡単な説明】
【0040】
【図1】本発明の一実施形態を示す図である。
【図2】本実施形態の原理および動作を説明する図である。
【図3】本実施形態に適用可能な2つの帯域の組み合わせを示す図である。
【図4】従来のGPS受信機の構成例を示す図である。
【図5】時間帯に応じた電離層遅延の変化の一例を示す図である。
【発明を実施するための形態】
【0041】
以下、図面に基づいて本発明の実施形態について詳細に説明する。
図1は、本発明の一実施形態を示す図である。
図において、図4に示すものと機能および構成が同じものについては、同じ符号を付与し、ここではその説明を省略する。
【0042】
本実施形態と図4に示す従来例との構成の相違点は、以下の点にある。
(1) 無線部32に代えて無線部10が備えられる。
(2) 信号処理部40に代えて信号処理部20が備えられる。
【0043】
無線部10は、アンテナ31の給電点に並列に接続された下側波帯フィルタ11L、上側波帯フィルタ11Uおよび両側波帯フィルタ11Dから構成される。
【0044】
信号処理部20の構成は、図4に示す信号処理部40の構成と以下の点で異なる。
(1) コード/搬送波追尾部41に代えてコード/搬送波追尾部41Aが備えられ、そのコード/搬送波追尾部41Aの入力には既述の両側波帯フィルタ11Dの出力が接続される。
(2) 電離層遅延補正部45に代えて電離層遅延補正部45Aが備えられる。
【0045】
(3) 上記下側波帯フィルタ11Lおよび上側波帯フィルタ11Uの出力にそれぞれ接続されたコード追尾部21L、21Uが備えられる。
(4) これらのコード追尾部21U、21Lの出力にそれぞれ接続された電離層遅延係数算出部22が電離層遅延補正係数算出部43に代えて備えられる。
(5) 電離層遅延算出部44に代えて電離層遅延平滑部23が備えられる。
【0046】
なお、上記コード/搬送波追尾部41A、コード追尾部21L、21U、電離層遅延算出部22および電離層遅延平滑部23は、信号処理部20に組み込まれ、その信号処理部20よって実行されるソフトウェアとして構成される。
【0047】
以下、本実施形態の原理を説明する。
共通のGPS衛星から到来する受信波の周波数f1、f2の比の二乗値γ(=(f1/f2)2)と、これらの受信波に基づいてそれぞれ求められるGPS衛星の擬似距離PRf1、PRf2と、このように求められた擬似距離に電離層遅延に起因する誤差の補正が施されることによって得られる擬似距離PRとの間には、一般に、下式が成立する。
PR=(PRf2−γ・PRf1)/(1−γ)
【0048】
すなわち、周波数f1の受信波に生じる電離層遅延Tiono1 は、下式で与えられる。
Tiono1=PRf1−PR
=PRf1−{(PRf2−γPRf1)/(1−γ)}
=(PRf1−PRf2)/(1−γ)
【0049】
したがって、周波数がそれぞれf1、f2である受信波に個別に生じる電離層遅延の差ΔTは、下式で与えられる。
ΔT=PRf1−PRf2=(1−γ)(PRf1−PR) ・・・(1)
【0050】
ところで、所望の周波数Fの受信波に電離層で生じる電離層群遅延τ(F)は、一般に、その受信波が伝搬する電離層の領域における電子密度TEC[el/m2]と、伝搬速度Cととに対して、下式で与えられる。
τ(F)=[40.3/(C・F2)]・TEC ・・・(2)
【0051】
また、上述した擬似距離PRf1、PRf2は、該当するGPS衛星との間の距離Dに対して、それぞれ下式で与えられる。
PRf1=D+C・τ(f1) ・・・(3)
PRf2=D+C・τ(f2) ・・・(4)
【0052】
すなわち、これらの擬似距離PRf1、PRf2の差は、上式(2)〜(4)より、下式で与えられる。
PRf1−PRf2=C・(τ(f1)−τ(f2))
=40.3・TEC(1/f12−1/f22) ・・・(5)
【0053】
したがって、上記電子密度TECは、上式(5)より下式で与えられる。
TEC=(PRf1−PRf2)/{40.3・(1/f12−1/f22)} ・・・(6)
【0054】
以上を総合すると、所望の周波数Fの受信波に電離層で生じる電離層群遅延τ(F)は、上式(2)、(6)より下式で与えられる。
τ(F)=[40.3/(C・F2)]・(PRf1−PRf2)
/{40.3・(1/f12−1/f22)}
=(PRf1−PRf2)/{(1/f12−1/f22)・(C・F2)} ・・・(7)
=K・(PRf1−PRf2)/F2 ・・・(8)
K=1/{(1/f12−1/f22)・C} ・・・(9)
【0055】
図2は、本実施形態の原理および動作を説明する図である。
以下、図1ないし図2を参照して本実施形態の動作を上記原理に基づいて説明する。
なお、本実施形態では、本発明の作用効果がより顕著にかつ容易に得られる好適な実施形態とするため、GPS衛星から受信されるコードが既述の「L1C/Aコード」に代わる「L1Cコード」であると仮定する。
【0056】
本発明の特徴は、本実施形態では、従来例において既述の近似値AMP、PERに基づいて算出されていた電離層遅延Tionoに代わる電離層遅延Tiono′が以下の通りに求められ、かつ電離層遅延補正部45Aがその電離層遅延Tiono′に基づいて擬似距離を補正する点にある。
【0057】
下側波帯フィルタ11Lは、上記受信波の下側波帯(図2(a)に実線で示す。)の成分を抽出してヘテロダイン検波することにより中間周波信号SLを生成し、その中間周波信号SLをA/D変換することによりディジタル信号SDLを生成する。
【0058】
また、上側波帯フィルタ11Uは、GPS衛星から到来する受信波の上側波帯(図2(a)に点線で示す。)の成分を抽出してヘテロダイン検波することにより中間周波信号SUを生成し、その中間周波信号SUをA/D変換することによりディジタル信号SDUを生成する。
【0059】
なお、以下では、上記下側波帯および上側波帯の中心周波数は、図2(a)に示すように、それぞれf1、f2であると仮定する。
コード追尾部21Lは、以下の処理を行う。
【0060】
(1) 選択された個々のGPS衛星について、受信波(下側波帯)のドプラシフトを推定し、そのドップラシフトの中心値を含む所定の周波数帯域における受信波(下側波帯)との相関をとる。
【0061】
(2) 並行してGPS衛星から受信され得るL1Cコードの内、該当するGPS衛星から受信されたL1Cコードとの相関が最大となる周波数と、L1Cコードの位相とを検出してGPS衛星を捕捉する。
(3) 何れのGPS衛星についても、捕捉した後には、搬送波とL1Cコードの位相との追尾を継続して行う。
【0062】
(4) このようにしてGPS衛星から受信されるL1Cコードの位相を測定することにより、受信波が送信された時刻(以下、「送信時刻」という。)を求める。
(5) 「信号処理部20の内蔵時計(図示されない。)が与える時刻」の上記「送信時刻」に対する偏差を該当するGPS衛星から到来する下側波帯の伝搬所要時間T1として求める。
(6) この伝搬所要時間T1と上記側波帯(受信波)の伝搬速度の公称値cとの積として、既述の擬似距離PRf1を求める(図2(b)(1))。
【0063】
コード追尾部21Uは、上記ディジタル信号SDLに代わるディジタル信号SDUに、コード追尾部21Lによって行われる処理と同様の処理を施すことにより、上側波帯の伝搬所要時間T2を求め、その伝搬所要時間T2と上記公称値cとの積として既述の擬似距離PRf2を求める(図2(b)(2))。
【0064】
電離層遅延算出部22は、以下の値に基づいて上式(8) で示される算術演算を行うことにより、電離層群遅延τ(F)を求める(図2(3),(4))。
(1) 上式(9) で示される定数K
(2) GPS衛星から到来し、かつ測位に用いられるべき受信波の周波数F(=(f1+f2)/2)
(3) コード追尾部21L、21Uによってそれぞれ求められた擬似距離PRf1、PRf2
【0065】
電離層遅延平滑部23は、このようにして求められた電離層群遅延τ(F)の列を所定の時定数で時系列の順に平滑(例えば、「指数平滑法」に基づいて行われる。)することにより、その時定数より短い周期で変動する誤差の成分が抑圧された電離層遅延Tiono′を求める。
【0066】
一方、両側波帯11Dは、GPS衛星からアンテナ31に到来した受信波をヘテロダイン検波することにより中間周波信号Sを生成し、その中間周波信号SをA/D変換することにより、ディジタル信号SDを生成する。
【0067】
コード/搬送波追尾部41Aは、図4に示すコード/搬送波追尾部41によって行われる処理と同様の処理をコード追尾部21L、21Uと同期して行うことにより、各GPS衛星の選択、受信波のドプラシフトの推定およびGPS衛星の捕捉を行う。
【0068】
擬似距離算出部42は、このようなコード/搬送波追尾部41Aの配下で、図4に示す従来例と同様に、GPS衛星の擬似距離PRを求める。
【0069】
電離層遅延補正部45Aは、既述の通りに擬似距離算出部42によって求められたGPS衛星の擬似距離PRから、電離層遅延Tiono′に相当する距離Diono′(=c・Tiono′)を減じることにより、その擬似距離を補正する。
【0070】
なお、このような擬似距離の補正を実現するソフトウェアについては、本願が出願される時点においてこのような補正をディジタル信号処理として実現可能な信号処理系の一般的な処理能力によれば、演算対象の情報量や演算手順に対して十分な処理量の確保と、電離層遅延が変動し得る一般的な周期より大幅に高速な実行との何れもが可能である。
【0071】
すなわち、信号処理部20が「複数の受信機を備えることなく構成される無線部10」と連係して既述の処理を行うことにより、構成が大幅に複雑化することなく、かつ下表に示すように、GPS測位系の主要な誤差の要因である電離層遅延が精度よく安定に補正される。
【表1】
【0072】
したがって、本実施形態によれば、コストが大幅に増加することなく、測位や測距の精度が高められ、さらに、今後現用に供される可能性が高い広帯域の航行衛星、あるいはBOC(Binary
Offset Carrier) で変調された無線信号を送信する航行衛星による測位系に対して、柔軟かつ積極的な適応が可能となる。
【0073】
また、本実施形態によれば、既に広く普及しているカーナビ、PND(Portable
Navigation Device, Personal Navigation Device)、携帯電話端末等だけではなく、多様な環境下で稼働すべき多くの装置に対して衛星航法に基づく測位や測距の適用が可能となる。
【0074】
なお、本実施形態では、既述の周波数f1、f2は、GPS衛星から到来して受信波の下側波帯および上側波帯の中心周波数に設定されている。
しかし、これらの周波数f1、f2は、共通のGPS衛星から並行して到来する2つの異なる受信波の周波数、あるいは1つの受信波の占有帯域に含まれる既知の周波数であるならば、以下に列記する何れの周波数であってもよい。
【0075】
(1) 「受信波の下側波帯と上側波帯との何れか一方の周波数f1」および「その受信波の占有帯域に含まれる搬送波周波数または所望の周波数f2(≠f1)」…図3(a)、(b)
(2) 受信波の占有帯域に含まれ、かつ本発明の適用に相応しい既知の2つの周波数f1、f2…図3(c)
【0076】
また、上記下側波帯および上側波帯は、該当する受信波が拡散符号との乗算による直接拡散、あるいは既述のBOCとの乗算との何れかによって生成される側波帯であってもよい。
さらに、本実施形態では、GPS衛星から到来し、かつ測位に用いられるべき受信波の周波数Fとして、その受信波の搬送波の周波数(=(f1+f2)/2)が適用されている。
【0077】
しかし、このような周波数Fは、例えば、以下の何れの周波数に設定されてもよい。
(1) 下側波帯のみが測位に供される場合:下側波帯の周波数f1
(2) 上側波帯のみが測位に供される場合:上側波帯の周波数f2
(3) 受信波の占有帯域の内、その受信波の生成に供される変調方式や多元接続方式に適合し、かつ測位に供される主要な成分が分布する占有帯域の中心周波数(搬送波周波数であってもよい。)
(4) 受信波とは別の共通のGPS衛星から到来して測位(測距)に供され、かつ占有帯域が上記擬似距離PRf1、PRf2の計測に供された受信波の占有帯域とは異なる無線信号の周波数(搬送波周波数でなくてもよい。)
【0078】
また、本実施形態では、上式(8) に含まれる項(PRf1−PRf2)が既述の下側波帯と上側波帯との搬送波位相差Δφと波長λとの積で代替されることにより、擬似距離PRf1、PRf2を求めるために行われるべき復調や復号化の省略や簡略化が図られてもよい。
【0079】
さらに、本実施形態では、電離層遅延の補正のために行われる処理については、既述の形態に限らず、所望の精度や応答性が達成されるならば、例えば、以下に列記する形態で実現され、あるいは演算対象や演算手順に如何なる変更が加えられてもよい。
【0080】
(1) 上式(8)、(9)の双方もしくは何れか一方に含まれる値が近似値で代替される。
(2) 上式(8)、(9)の双方もしくは何れか一方が近似式で代替される。
(3) 上式(8)、(9)の双方もしくは何れか一方の全てまたは一部の項が予め求められたテーブルのルックアップにより求められる。
【0081】
また、本実施形態では、既述の処理は、信号処理部20によって単独で行われている。
しかし、このような処理は、情報処理や信号処理を行う複数のプロセッサや専用のハードウェアに対して、如何なる形態で機能分散や負荷分散が図られてもよい。
【0082】
さらに、本発明は、図1に示すGPS受信機に予め組み込まれなくてもよく、例えば、以下の装置として構成されてもよい。
(1) 電離層遅延の補正を実現する処理(以下、「電離層遅延補正処理」という。)のために参照されるべき情報を引き渡すGPS受信機に組み込み可能に構成されたモジュール
(2) 電離層遅延補正処理のために参照されるべき情報を引き渡し、その電離層遅延補正処理の結果に基づいて測位誤差の圧縮を図るGPS受信機に組み込み可能に構成されたモジュール
【0083】
また、本発明は、GPS衛星だけではなく、例えば、構築や開発が進められているグロナス、ガリレオ、コンパスその他の多様な航行衛星が適用された測位系や測距系にも同様に適用可能である。
【0084】
さらに、本発明は、上述した実施形態に限定されず、本発明の範囲において多様な実施形態の構成が可能であり、構成要素の全てまたは一部に如何なる改良が施されてもよい。
【0085】
以下、本願に開示された発明の内、「特許請求の範囲」に記載しなかった発明の構成、作用および効果を「特許請求の範囲」および「課題を解決するための手段」の欄の記載に準じた様式で列記する。
【0086】
[請求項6] 請求項1に記載の電離層遅延評価装置において、
前記距離d1、d2は、
前記第一の帯域と前記第二の帯域とにおける前記受信波の個別の成分と、前記第一の帯域と前記第二の帯域とを介して受信されるべき前記受信波の個別の成分との相関に基づいて求められた
ことを特徴とする電離層遅延評価装置。
【0087】
このような構成の電離層遅延評価装置では、請求項1ないし請求項3の何れか1項に記載の電離層遅延評価装置において、前記距離d1、d2は、前記第一の帯域と前記第二の帯域とにおける前記受信波の個別の成分と、前記第一の帯域と前記第二の帯域とを介して受信されるべき前記受信波の個別の成分との相関に基づいて求められる。
【0088】
すなわち、電離層の状態の推定に供される距離d1、d2は、上記受信波の復調、信号判定、復号化の何れもが正規に行われなくても求められる。
【0089】
したがって、構成の複雑化、コストの増加および信頼性の低下の回避や緩和が図られる。
【0090】
[請求項7] 請求項1に記載の電離層遅延評価装置において、
前記第一の帯域と前記第二の帯域とにおける前記受信波の成分が個別に復調されることによって取得され、かつ前記航行衛星から送信された伝送情報に基づいて、前記距離d1、d2が求められる
ことを特徴とする電離層遅延評価装置。
【0091】
このような構成の電離層遅延評価装置では、請求項1ないし請求項3の何れか1項に記載の電離層遅延評価装置において、前記第一の帯域と前記第二の帯域とにおける前記受信波の成分が個別に復調されることによって取得され、かつ前記航行衛星から送信された伝送情報に基づいて、前記距離d1、d2が求められる。
【0092】
すなわち、電離層の状態の推定に供される距離d1、d2は、航行衛星から到来した受信波に本来的に適用されるべき航法の下で求められる。
【0093】
したがって、上記距離d1、d2を求めるための専用の構成要素の削減が図られ、コストの増加および信頼性の低下の回避や緩和が図られる。
【0094】
[請求項8] 請求項1、2、3、6、7の何れか1項に記載の電離層遅延評価装置において、
前記電離層の状態は、
前記電離層に分布する電子の密度である
ことを特徴とする電離層遅延評価装置。
【0095】
このような構成の電離層遅延評価装置では、前記電離層の状態は、前記電離層に分布する電子の密度である。
【0096】
すなわち、天頂方向から大幅に隔たった方向に位置する航行衛星から無線信号が到来する場合であっても、このような無線信号の伝搬路に介在する電離層の状態は、その電離層における群遅延を左右する主要な要因である電子の密度として推定される。
【0097】
したがって、異なる位置にある航行衛星から個別に到来する何れの無線信号についても、これらの無線信号が到来する地域の如何にかかわらず、それぞれの伝搬路に介在する電離層で生じた遅延が精度よく求められる。
【0098】
[請求項9] 請求項1、2、3、6、7、8の何れか1項に記載の電離層遅延評価装置において、
前記第一の帯域および前記第二の帯域は、
前記受信波が有する2つの側波帯の一方および他方である
ことを特徴とする電離層遅延評価装置。
【0099】
このような構成の電離層遅延評価装置では、請求項1、2、3、6、7、8の何れか1項に記載の電離層遅延評価装置において、前記第一の帯域および前記第二の帯域は、前記受信波が有する2つの側波帯の一方および他方である。
【0100】
すなわち、第一の帯域および第二の帯域は、航行衛星から到来する受信波の生成に適用された変調方式の下で本来的に形成される2つの帯域に設定される。
【0101】
したがって、航行衛星の距離d1、d2と、上記第一および第二の帯域における受信波の搬送波成分の位相の差Δφとの何れも、その受信波の復調、信号判定および復号化の何れかの処理の共用の下で、精度よく安定に求められる。
【0102】
[請求項10] 請求項1、2、3、6、7、8、9の何れか1項に記載の電離層遅延評価装置において、
前記第一の帯域と前記第二の帯域とにおける前記受信波の成分は、
前記受信波に基づく測位または測距に供される共通の情報で個別に変調されている
ことを特徴とする電離層遅延評価装置。
【0103】
このような構成の電離層遅延評価装置では、請求項1、2、3、6、7、8、9の何れか1項に記載の電離層遅延評価装置において、前記第一の帯域と前記第二の帯域とにおける前記受信波の成分は、前記受信波に基づく測位または測距に供される共通の情報で個別に変調されている。
【0104】
すなわち、航行衛星の距離d1、d2と、第一の帯域および第二の帯域における受信波の搬送波成分の位相の差Δφとの何れも、上記測位または測距に供される情報の取得に不要な処理を経ることなく得られる。
【0105】
したがって、構成の簡略化に併せて、コストの削減および信頼性の向上が図られる。
[請求項11] 請求項4に記載の航法装置において、
前記距離d1、d2または前記距離d1、d2の差Δdに基づいて求められ、かつ前記外部から引き渡された前記電離層の遅延に基づいて、前記測位または前記測距の誤差を補正する誤差補正手段を備えた
ことを特徴とする航法装置。
【0106】
このような構成の航法装置では、請求項4に記載の航法装置において、誤差補正手段は、前記距離d1、d2または前記距離d1、d2の差Δdに基づいて求められ、かつ前記外部から引き渡された前記電離層の遅延に基づいて、前記測位または前記測距の誤差を補正する。
【0107】
すなわち、請求項1または請求項3に記載の電離層遅延評価装置が備えられない航法装置をオプションとして搭載可能な航法装置が実現される。
【0108】
したがって、請求項1または請求項3に記載の電離層遅延評価装置の何れもが備えられない航法装置の活用が図られ、その航法装置による測位や測距の精度の向上が図られる。
【0109】
[請求項12] 請求項5に記載の航法装置において、
前記位相の差Δφに基づいて求められ、かつ前記外部から引き渡された前記電離層の遅延に基づいて、前記測位または前記測位の誤差を補正する誤差補正手段を備えた
ことを特徴とする航法装置。
【0110】
このような構成の航法装置では、請求項5に記載の航法装置において、誤差補正手段は、前記位相の差Δφに基づいて求められ、かつ前記外部から引き渡された前記電離層の遅延に基づいて、前記測位または前記測位の誤差を補正する。
【0111】
すなわち、請求項2に記載の電離層遅延評価装置が備えられない航法装置をオプションとして搭載可能な航法装置が実現される。
【0112】
したがって、請求項2に記載の電離層遅延評価装置の何れもが備えられない航法装置の活用が図られ、その航法装置による測位や測距の精度の向上が図られる。
【符号の説明】
【0113】
10,32 無線部
11D 両側波帯フィルタ
11L 下側波帯フィルタ
11U 上側波帯フィルタ
20,40 信号処理部
21L,21U コード追尾部
22 電離層遅延算出部
23 電離層遅延平滑部
31 アンテナ
41,41A コード/搬送波追尾部
42 擬似距離算出部
43 電離層遅延補正係数算出部
44 電離層遅延算出部
45,45A 電離層遅延補正部
46 測位演算部
【特許請求の範囲】
【請求項1】
航行衛星から電離層を介して到来した受信波の占有帯域に含まれ、かつ帯域幅が異なる第一の帯域および第二の帯域における前記受信波の成分に基づいてそれぞれ求められた前記航行衛星の距離d1、d2の差Δdと、前記第一の帯域内の周波数f1および第二の帯域内の周波数f2とに基づいて、前記電離層の状態を推定する電離層状態推定手段と、
前記航行衛星から前記受信波として到来し得る無線信号の周波数Fと前記電離層の状態とに基づいて、前記無線信号に前記電離層で生じた遅延を求める遅延算出手段と
を備えたことを特徴とする電離層遅延評価装置。
【請求項2】
航行衛星から電離層を介して到来した受信波の占有帯域に含まれ、かつ帯域幅が異なる第一の帯域および第二の帯域における前記受信波の搬送波成分の位相の差Δφと、前記第一の帯域内の周波数f1および第二の帯域内の周波数f2とに基づいて、前記電離層の状態を推定する電離層状態推定手段と、
前記航行衛星から前記受信波として到来し得る無線信号の周波数Fと前記電離層の状態とに基づいて、前記無線信号に前記電離層で生じた遅延を求める遅延算出手段と
を備えたことを特徴とする電離層遅延評価装置。
【請求項3】
請求項1または請求項2に記載の電離層遅延評価装置において、
前記無線信号は、
前記電離層の状態の推定に供された受信波と占有帯域が異なる
ことを特徴とする電離層遅延評価装置。
【請求項4】
航行衛星から電離層を介して到来した受信波に基づいて測位または測距を行う航法装置において、
前記受信波の占有帯域に含まれ、かつ帯域幅が異なる第一の帯域および第二の帯域における前記受信波の成分に基づいてそれぞれ求められた前記航行衛星の距離d1、d2、または前記距離d1、d2の差Δdを外部に引き渡すインターフェース手段を備えた
ことを特徴とする航法装置。
【請求項5】
航行衛星から電離層を介して到来した受信波に基づいて測位または測距を行う航法装置において、
前記受信波の占有帯域に含まれ、かつ帯域幅が異なる第一の帯域および第二の帯域にそれぞれ分布する前記受信波の搬送波成分の位相の差Δφを外部に引き渡すインターフェース手段を備えた
ことを特徴とする航法装置。
【請求項1】
航行衛星から電離層を介して到来した受信波の占有帯域に含まれ、かつ帯域幅が異なる第一の帯域および第二の帯域における前記受信波の成分に基づいてそれぞれ求められた前記航行衛星の距離d1、d2の差Δdと、前記第一の帯域内の周波数f1および第二の帯域内の周波数f2とに基づいて、前記電離層の状態を推定する電離層状態推定手段と、
前記航行衛星から前記受信波として到来し得る無線信号の周波数Fと前記電離層の状態とに基づいて、前記無線信号に前記電離層で生じた遅延を求める遅延算出手段と
を備えたことを特徴とする電離層遅延評価装置。
【請求項2】
航行衛星から電離層を介して到来した受信波の占有帯域に含まれ、かつ帯域幅が異なる第一の帯域および第二の帯域における前記受信波の搬送波成分の位相の差Δφと、前記第一の帯域内の周波数f1および第二の帯域内の周波数f2とに基づいて、前記電離層の状態を推定する電離層状態推定手段と、
前記航行衛星から前記受信波として到来し得る無線信号の周波数Fと前記電離層の状態とに基づいて、前記無線信号に前記電離層で生じた遅延を求める遅延算出手段と
を備えたことを特徴とする電離層遅延評価装置。
【請求項3】
請求項1または請求項2に記載の電離層遅延評価装置において、
前記無線信号は、
前記電離層の状態の推定に供された受信波と占有帯域が異なる
ことを特徴とする電離層遅延評価装置。
【請求項4】
航行衛星から電離層を介して到来した受信波に基づいて測位または測距を行う航法装置において、
前記受信波の占有帯域に含まれ、かつ帯域幅が異なる第一の帯域および第二の帯域における前記受信波の成分に基づいてそれぞれ求められた前記航行衛星の距離d1、d2、または前記距離d1、d2の差Δdを外部に引き渡すインターフェース手段を備えた
ことを特徴とする航法装置。
【請求項5】
航行衛星から電離層を介して到来した受信波に基づいて測位または測距を行う航法装置において、
前記受信波の占有帯域に含まれ、かつ帯域幅が異なる第一の帯域および第二の帯域にそれぞれ分布する前記受信波の搬送波成分の位相の差Δφを外部に引き渡すインターフェース手段を備えた
ことを特徴とする航法装置。
【図1】

【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2012−137448(P2012−137448A)
【公開日】平成24年7月19日(2012.7.19)
【国際特許分類】
【出願番号】特願2010−291467(P2010−291467)
【出願日】平成22年12月28日(2010.12.28)
【出願人】(000004330)日本無線株式会社 (1,186)
【Fターム(参考)】
【公開日】平成24年7月19日(2012.7.19)
【国際特許分類】
【出願日】平成22年12月28日(2010.12.28)
【出願人】(000004330)日本無線株式会社 (1,186)
【Fターム(参考)】
[ Back to top ]