
露光装置、及びデバイス製造方法
【課題】移動体の位置情報を精度良く計測できる位置計測装置を提供する。
【解決手段】位置計測装置は、移動面内を移動する移動体の位置情報を計測する。位置計測装置は、移動体の第1面に配置された移動格子に光を照射する光源と、光源との位置関係が固定で、移動格子で回折された光が入射する第2面を有し、入射した光を回折又は反射して移動格子に戻す固定光学部材と、移動格子を再度介して干渉された光を検出する検出装置と、を備え、第1面と第2面とはほぼ平行である。
【解決手段】位置計測装置は、移動面内を移動する移動体の位置情報を計測する。位置計測装置は、移動体の第1面に配置された移動格子に光を照射する光源と、光源との位置関係が固定で、移動格子で回折された光が入射する第2面を有し、入射した光を回折又は反射して移動格子に戻す固定光学部材と、移動格子を再度介して干渉された光を検出する検出装置と、を備え、第1面と第2面とはほぼ平行である。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、移動体の位置情報を計測する位置計測装置及び位置計測方法、基板にパターンを形成するパターン形成装置及びパターン形成方法、基板を露光する露光装置及び露光方法、並びにデバイス製造方法に関する。
【背景技術】
【0002】
半導体デバイス、電子デバイス等のマイクロデバイスの製造工程において、例えば露光装置、インクジェット装置等、基板にデバイスパターンを形成するパターン形成装置が使用される。パターン形成装置は、基板を保持して移動する基板ステージ等の移動体を備え、その移動体の位置情報を位置計測装置で計測しながら、基板にデバイスパターンを形成する。下記特許文献には、エンコーダシステムを用いて移動体の位置情報を計測する技術の一例が開示されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】米国特許出願公開第2006/0227309号明細書
【発明の概要】
【発明が解決しようとする課題】
【0004】
エンコーダシステムは、光源から射出された光をスケール板に照射し、そのスケール板を介した光を検出器で検出する。例えば光源等の熱によって、光路上の雰囲気の温度揺らぎ(屈折率変動)が生じると、移動体の位置情報を精確に計測できなくなる可能性がある。また、熱によって移動体が熱変形すると、その移動体の位置情報が精確に計測できなくなったり、移動体の移動性能が低下したりする可能性がある。その結果、例えばパターン欠陥等、パターン形成不良が発生し、不良デバイスが発生する可能性がある。
【0005】
本発明の態様は、移動体の位置情報を精度良く計測できる位置計測装置及び位置計測方法を提供することを目的とする。また本発明の態様は、パターン形成不良を抑制できるパターン形成装置及びパターン形成方法を提供することを目的とする。また本発明の態様は、露光不良の発生を抑制できる露光装置及び露光方法を提供することを目的とする。また本発明の態様は、不良デバイスの発生を抑制できるデバイス製造方法を提供することを目的とする。
【課題を解決するための手段】
【0006】
本発明の第1の態様に従えば、移動面内を移動する移動体の位置情報を計測する位置計測装置であって、移動体の第1面に配置された移動格子に光を照射する光源と、光源との位置関係が固定で、移動格子で回折された光が入射する第2面を有し、入射した光を回折又は反射して移動格子に戻す固定光学部材と、移動格子を再度介して干渉された光を検出する検出装置と、を備え、第1面と第2面とはほぼ平行である位置計測装置が提供される。
【0007】
本発明の第2の態様に従えば、基板にパターンを形成するパターン形成装置であって、基板を保持して移動可能な移動体の位置情報を計測するために、上述の第1の態様の位置計測装置を備えたパターン形成装置が提供される。
【0008】
本発明の第3の態様に従えば、基板を露光光で露光する露光装置であって、基板を保持して移動可能な移動体の位置情報を計測するために、上述の第1の態様の位置計測装置を備えた露光装置が提供される。
【0009】
本発明の第4の態様に従えば、上述の第3の態様の露光装置を用いて基板を露光することと、露光された基板を現像することと、を含むデバイス製造方法が提供される。
【0010】
本発明の第5の態様に従えば、移動面内を移動する移動体の位置情報を計測する位置計測方法であって、移動体の第1面に配置された移動格子に光を照射することと、光源との位置関係が固定で、入射した光を回折又は反射する、第1面とほぼ平行な第2面を有する固定光学部材に、移動格子で回折された光を入射させることと、固定光学部材に入射した光を回折又は反射して、移動格子に戻すことと、移動格子を再度介して干渉された光を検出することと、を含む位置計測方法が提供される。
【0011】
本発明の第6の態様に従えば、基板にパターンを形成するパターン形成方法であって、基板を保持して移動可能な移動体の位置情報を、上述の第5の態様の位置計測方法を用いて計測することと、移動体に保持された基板にパターンを形成することと、を含むパターン形成方法が提供される。
【0012】
本発明の第7の態様に従えば、基板を露光光で露光する露光方法であって、基板を保持して移動可能な移動体の位置情報を、上述の第5の態様の位置計測方法を用いて計測することと、移動体に保持された基板を露光することと、を含む露光方法が提供される。
【0013】
本発明の第8の態様に従えば、上述の第7の態様の露光方法を用いて基板を露光することと、露光された基板を現像することと、を含むデバイス製造方法が提供される。
【発明の効果】
【0014】
本発明によれば、移動体の位置情報を精度良く計測でき、その移動体に保持された基板のパターン形成不良、露光不良を抑制できる。したがって、不良デバイスの発生を抑制できる。
【図面の簡単な説明】
【0015】
【図1】本実施形態に係る露光装置の一例を示す概略構成図である。
【図2】本実施形態に係る第1、第2基板ステージ及び基板ステージ駆動システムを示す平面図である。
【図3】本実施形態に係るエンコーダシステムの一例を説明するための側面図である。
【図4】本実施形態に係るエンコーダシステムの一例を説明するための平面図である。
【図5】本実施形態に係るエンコーダシステムの一例を説明するための斜視図である。
【図6】本実施形態に係るエンコーダシステムの一例を説明するための模式図である。
【図7】本実施形態に係るエンコーダシステムの一例を説明するための模式図である。
【図8】本実施形態に係るエンコーダシステムの一例を説明するための模式図である。
【図9】本実施形態に係る露光装置の動作の一例を説明するための模式図である。
【図10】本実施形態に係る露光装置の動作の一例を説明するための模式図である。
【図11】本実施形態に係るエンコーダシステムの一例を説明するための模式図である。
【図12】本実施形態に係るエンコーダシステムの一例を説明するための模式図である。
【図13】本実施形態に係るエンコーダシステムの一例を説明するための模式図である。
【図14】マイクロデバイスの製造工程の一例を説明するためのフローチャートである。
【発明を実施するための形態】
【0016】
以下、本発明の実施形態について図面を参照しながら説明するが、本発明はこれに限定されない。なお、以下の説明においては、XYZ直交座標系を設定し、このXYZ直交座標系を参照しつつ各部材の位置関係について説明する。水平面内の所定方向をX軸方向、水平面内においてX軸方向と直交する方向をY軸方向、X軸方向及びY軸方向のそれぞれと直交する方向(すなわち鉛直方向)をZ軸方向とする。また、X軸、Y軸及びZ軸まわりの回転(傾斜)方向をそれぞれ、θX、θY及びθZ方向とする。
【0017】
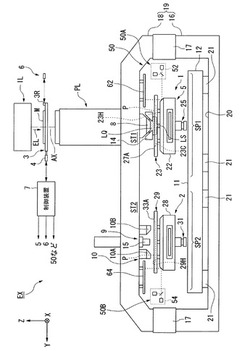
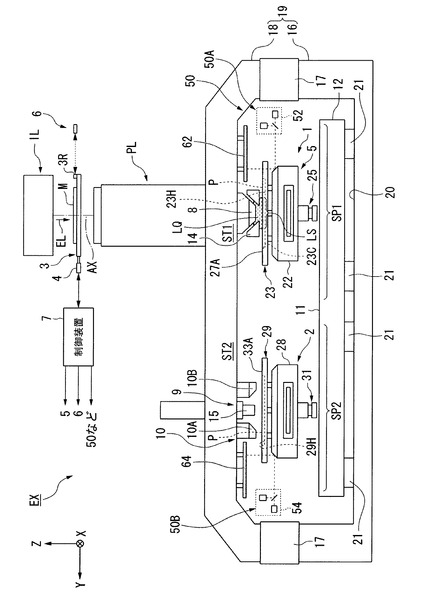
図1は、本実施形態に係る露光装置EXを示す概略構成図である。本実施形態においては、露光装置EXが、例えば米国特許第6341007号明細書、米国特許第6400441号明細書、米国特許第6549269号明細書、米国特許第6590634号明細書、米国特許第6208407号明細書、米国特許第6262796号明細書、米国特許第6674510号明細書、米国特許第6208407号明細書、米国特許第6710849号明細書及び米国特許第6674510号明細書等に開示されているような、基板Pを保持しながら移動可能な複数(2つ)の基板ステージ1、2を備えたツインステージ型の露光装置である場合を例にして説明する。すなわち、本実施形態においては、露光装置EXは、基板Pを保持しながら移動可能な第1基板ステージ1と、第1基板ステージ1と独立して、基板Pを保持しながら移動可能な第2基板ステージ2とを有する。
【0018】
図1において、露光装置EXは、マスクMを保持しながら移動可能なマスクステージ3と、基板Pを保持しながら移動可能な第1基板ステージ1と、第1基板ステージ1と独立して、基板Pを保持しながら移動可能な第2基板ステージ2と、マスクステージ3を移動するマスクステージ駆動システム4と、第1基板ステージ1及び第2基板ステージ2を移動する基板ステージ駆動システム5と、第1基板ステージ1及び第2基板ステージ2を移動可能に支持するガイド面11を有するプレート部材12と、マスクステージ3の位置情報を計測するレーザ干渉計を含む干渉計システム6と、第1基板ステージ1及び第2基板ステージ2の位置情報を計測するエンコーダシステム50と、マスクMを露光光ELで照明する照明系ILと、露光光ELで照明されたマスクMのパターンの像を基板Pに投影する投影光学系PLと、露光装置EX全体の動作を制御する制御装置7とを備えている。
【0019】
また、露光装置EXは、露光光ELが照射される第1位置を含む第1領域SP1を有する露光ステーションST1と、基板Pの位置情報を計測するための第2位置を含み、第1領域SP1と異なる第2領域SP2を有する計測ステーションST2とを備えている。露光ステーションST1は、基板Pの露光を行う。計測ステーションST2は、露光に関する所定の計測及び基板Pの交換を行う。
【0020】
露光ステーションST1には、照明系IL、マスクステージ3及び投影光学系PL等が配置されている。投影光学系PLの複数の光学素子のうち、投影光学系PLの像面に最も近い第1光学素子8は、露光光ELを射出する射出面(下面)を有する。露光光ELが照射される第1位置は、第1光学素子8と対向する位置を含む。
【0021】
計測ステーションST2には、基板Pの位置情報を取得するためのアライメントシステム9、及びフォーカス・レベリング検出システム10等、基板Pの露光に関する計測を実行可能な各種計測システムが配置されている。アライメントシステム9は、第2光学素子15を含む複数の光学素子を有し、それら光学素子を用いて、基板Pの位置情報を取得する。フォーカス・レベリング検出システム10も、複数の光学素子を有し、それら光学素子を用いて、基板Pの位置情報を取得する。基板Pの位置情報を計測するための第2位置は、第2光学素子15と対向する位置を含む。
【0022】
第1、第2基板ステージ1、2のそれぞれは、第1領域SP1及び第2領域SP2を含むガイド面11の所定領域内を、基板Pを保持しながら移動可能である。本実施形態においては、ガイド面11は、XY平面とほぼ平行である。第1、第2基板ステージ1、2のそれぞれは、露光ステーションST1と計測ステーションST2との間でガイド面11内を移動可能である。
【0023】
また、本実施形態の露光装置EXは、液体LQを介して露光光ELで基板Pを露光する液浸露光装置である。露光装置EXは、露光光ELの光路の少なくとも一部を液体LQで満たすように、液体LQで液浸空間LSを形成可能なノズル部材(シール部材)14を備えている。液浸空間LSは、液体LQで満たされた空間である。本実施形態においては、液体LQとして、水(純水)を用いる。本実施形態において、ノズル部材14は、例えば米国特許公開第2004/136494号明細書等に開示されているようなシール部材を含む。ノズル部材14は、第1光学素子8の近傍に配置されており、第1光学素子8と第1位置に配置された物体との間の露光光ELの光路を液体LQで満たすように液浸空間LSを形成する。第1位置に配置される物体は、第1、第2基板ステージ1、2及び第1、第2基板ステージ1、2に保持される基板Pを含む。少なくとも基板Pの露光時に、ノズル部材14は、投影光学系PLの投影領域を含む基板Pの表面の一部の領域(局所的な領域)が液体LQで覆われるように液浸空間LSを形成する。すなわち、本実施形態の露光装置EXは、局所液浸方式を採用する。
【0024】
本実施形態の露光装置EXは、マスクMと基板Pとを所定の走査方向に同期移動しつつ、マスクMのパターンの像を基板Pに投影する走査型露光装置(所謂スキャニングステッパ)である。露光装置EXは、基板Pを投影光学系PLの投影領域に対して所定の走査方向に移動するとともに、その基板Pの移動と同期して、照明系ILの照明領域に対してマスクMを所定の走査方向に移動しつつ、投影光学系PLと液体LQとを介して基板Pを露光光ELで露光する。これにより、マスクMのパターンの像が基板Pに投影される。
【0025】
露光装置EXは、例えばクリーンルーム内の床面上に配置されたコラム16及びコラム16上に防振装置17を介して配置された支持フレーム18を含むボディ19を備えている。コラム16は、防振装置21を介してプレート部材12を支持する支持面20を有する。支持フレーム18は、投影光学系PL、アライメントシステム9及びフォーカス・レベリング検出システム10等を支持する。
【0026】
照明系ILは、マスクM上の所定の照明領域を均一な照度分布の露光光ELで照明する。照明系ILから射出される露光光ELとしては、例えば水銀ランプから射出される輝線(g線、h線、i線)及びKrFエキシマレーザ光(波長248nm)等の遠紫外光(DUV光)、ArFエキシマレーザ光(波長193nm)及びF2レーザ光(波長157nm)等の真空紫外光(VUV光)等が用いられる。本実施形態においては、露光光ELとして、ArFエキシマレーザ光が用いられる。
【0027】
マスクステージ3は、リニアモータ等のアクチュエータを含むマスクステージ駆動システム4により、マスクMを保持しながら、X軸、Y軸及びθZ方向の3つの方向に移動可能である。マスクステージ3(マスクM)の位置情報は、干渉計システム6のレーザ干渉計によって計測される。レーザ干渉計は、マスクステージ3に設けられた計測ミラー3Rを用いて、マスクステージ3のX軸、Y軸及びθZ方向の3つの方向に関する位置情報を計測する。制御装置7は、干渉計システム6の計測結果に基づいて、マスクステージ駆動システム4を作動し、マスクステージ3(マスクM)の位置制御を行う。
【0028】
投影光学系PLは、マスクMのパターンの像を所定の投影倍率で基板Pに投影する。投影光学系PLの複数の光学素子は鏡筒で保持されている。本実施形態の投影光学系PLは、その投影倍率が例えば1/4、1/5、1/8等の縮小系である。なお、投影光学系PLは等倍系及び拡大系のいずれでもよい。本実施形態においては、投影光学系PLの光軸AXはZ軸方向と平行である。また、投影光学系PLは、反射光学素子を含まない屈折系、屈折光学素子を含まない反射系、反射光学素子と屈折光学素子とを含む反射屈折系のいずれであってもよい。また、投影光学系PLは、倒立像と正立像とのいずれを形成してもよい。
【0029】
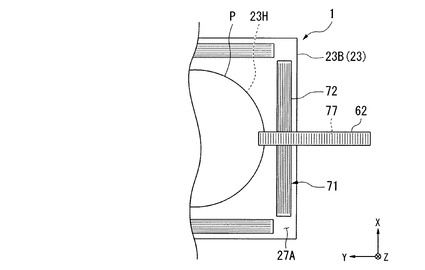
次に、図1、図2及び図3を参照しながら、第1、第2基板ステージ1、2及び基板ステージ駆動システム5について説明する。図2は、第1、第2基板ステージ1、2及び基板ステージ駆動システム5を上方から見た平面図、図3は、露光ステーションST1に配置されている第1基板ステージ1の近傍を示す側面図である。
【0030】
第1基板ステージ1は、ステージ本体22と、ステージ本体22に支持され、基板Pを着脱可能な基板ホルダ23Hを有する第1基板テーブル23とを有する。ステージ本体22の下面には、例えば国際公開第2006/009254号パンフレットに開示されているような、気体軸受を形成可能な支持装置25が設けられている。第1基板ステージ1は、支持装置25によって形成された気体軸受によって、ガイド面11に非接触で支持される。第1基板テーブル23は、凹部23Cを有する。基板ホルダ23Hは、凹部23Cに配置されている。基板ホルダ23Hは、基板Pの表面とXY平面とがほぼ平行になるように、基板Pを保持する。第1基板テーブル23は、凹部23Cの周囲に配置された上面27Aを有する。上面27Aは、ほぼ平坦である。基板ホルダ23Hに保持された基板Pの表面と、上面27Aとは、ほぼ同一平面内に配置される(面一である)。第1基板ステージ1は、基板ステージ駆動システム5により、基板Pを保持しながら、X軸、Y軸、Z軸、θX、θY及びθZ方向の6つの方向に移動可能である。
【0031】
第2基板ステージ2は、ステージ本体28と、ステージ本体28に支持され、基板Pを着脱可能な基板ホルダ29Hを有する第2基板テーブル29とを有する。ステージ本体28の下面には、例えば国際公開第2006/009254号パンフレットに開示されているような、気体軸受を形成可能な支持装置31が設けられている。第2基板ステージ2は、支持装置31によって形成された気体軸受によって、ガイド面11に非接触で支持される。第2基板テーブル29は、凹部29Cを有する。基板ホルダ29Hは、凹部29Cに配置されている。基板ホルダ29Hは、基板Pの表面とXY平面とがほぼ平行になるように、基板Pを保持する。第2基板テーブル29は、凹部29Cの周囲に配置された上面33Aを有する。上面33Aは、ほぼ平坦である。基板ホルダ29Hに保持された基板Pの表面と、上面33Aとは、ほぼ同一平面内に配置される(面一である)。第2基板ステージ2は、基板ステージ駆動システム5により、基板Pを保持しながら、X軸、Y軸、Z軸、θX、θY及びθZ方向の6つの方向に移動可能である。
【0032】
基板ステージ駆動システム5は、リニアモータ等のアクチュエータを含み、第1基板ステージ1及び第2基板ステージ2のそれぞれを移動可能である。基板ステージ駆動システム5は、ステージ本体22及びステージ本体28のそれぞれをX軸、Y軸及びθZ方向に移動する粗動システムと、ステージ本体22に対して第1基板テーブル23をZ軸、θX及びθY方向に移動する微動システムと、ステージ本体28に対して第2基板テーブル29をZ軸、θX及びθY方向に移動する微動システムとを含む。第1、第2基板ステージ1、2は、粗動システムによって、露光ステーションST1と計測ステーションST2とを移動可能である。第1、第2基板テーブル23、29のそれぞれは、粗動システム及び微動システムによって、X軸、Y軸、Z軸、θX、θY及びθZ方向の6つの方向に移動可能である。
【0033】
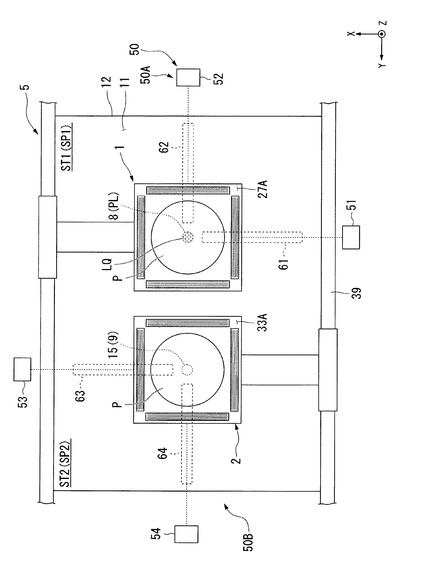
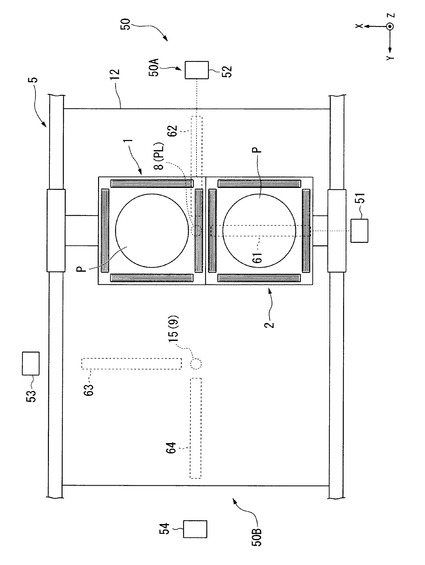
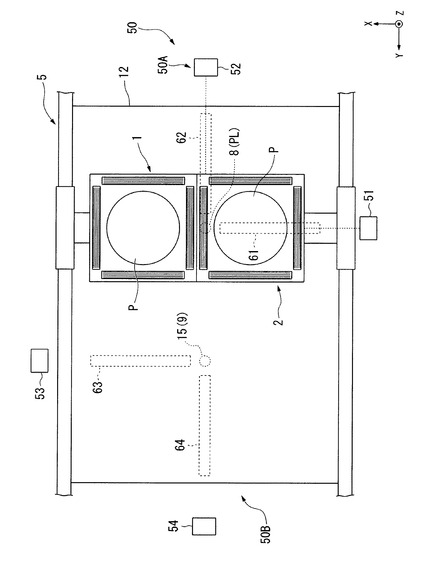
次に、第1、第2基板ステージ1、2の位置情報を計測するエンコーダシステム50の一例について説明する。エンコーダシステム50は、露光ステーションST1に配置されている第1、第2基板ステージ1、2の位置情報を計測する第1エンコーダユニット50Aと、計測ステーションST2に配置されている第1、第2基板ステージ1、2の位置情報を計測する第2エンコーダユニット50Bとを備えている。第1エンコーダユニット50Aは、第1、第2基板ステージ1、2のX軸方向に関する位置情報を計測するXエンコーダ本体51と、Y軸方向に関する位置情報を計測するYエンコーダ本体52とを含む。第2エンコーダユニット50Bは、第1、第2基板ステージ1、2のX軸方向に関する位置情報を計測するXエンコーダ本体53と、Y軸方向に関する位置情報を計測するYエンコーダ本体54とを含む。
【0034】
また、エンコーダシステム50は、各エンコーダ本体51、52、53、54と対応するように所定位置に配置された固定スケール61、62、63、64を備えている。固定スケール61、62は、露光ステーションST1に配置されている。固定スケール63、64は、計測ステーションST2に配置されている。本実施形態において、固定スケール61、62、63、64のそれぞれは、支持フレーム18に支持されている。固定スケール61、62、63、64は、例えばセラミックス、又は低膨張ガラス等、同一の材料で形成されている。
【0035】
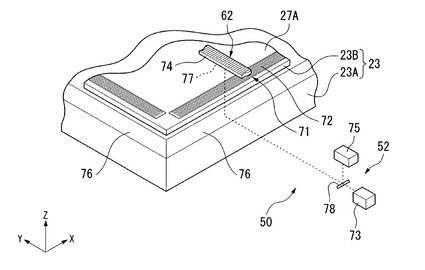
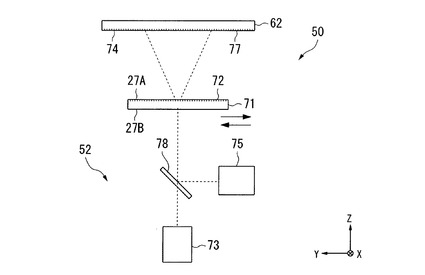
各エンコーダ本体51〜54は、ほぼ同等の構成を有する。また、各固定スケール61〜64も、ほぼ同等の構成を有する。以下、Yエンコーダ本体52及びそのYエンコーダ本体52に対応する固定スケール62について、図3〜図6を参照して説明する。図4は、固定スケール62及び第1基板ステージ1の一部を模式的に示す平面図、図5は、Yエンコーダ本体52及び固定スケール62を示す斜視図、図6は、エンコーダシステム50の原理を説明するための模式図である。
【0036】
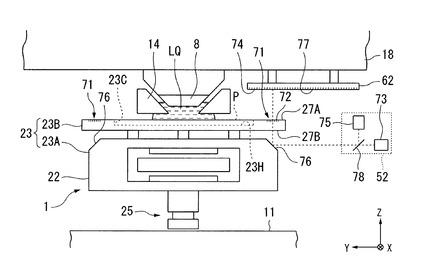
本実施形態において、第1基板テーブル23は、ボイスコイルモータ等のアクチュエータを介してステージ本体22上に搭載され、反射面76を有する反射部材23Aと、反射部材23A上に搭載され、基板ホルダ23H及び上面27Aを有する保持部材23Bとを含む。保持部材23Bは、反射部材23Aに固定されている。すなわち、反射部材23Aと保持部材23Bとの位置関係は固定である。反射面76は、第1基板テーブル23の−Y側の端に配置されている。反射面76は、エンコーダ本体52と対向可能である。反射面76は、例えばアルミニウムの膜によって形成されている。反射面76は、YZ平面内でXY平面と鋭角で交差している。本実施形態において、反射面76は、XY平面に対して45度傾斜している。
【0037】
保持部材23Bは、基板Pを保持する基板ホルダ23Hと、基板ホルダ23Hの周囲に配置された上面27Aと、上面27Aに形成された回折格子72を含む移動スケール71とを備えている。本実施形態において、回折格子72は、Y軸方向を周期方向とする一次元格子である。本実施形態において、移動スケール71は、保持部材23Bの一部を形成する。移動スケール71は、透明である。すなわち、移動スケール71は、保持部材23Bの一部に配置された、Y軸方向を周期方向とする回折格子72が形成された透過型の位相格子である。保持部材23Bのうち、少なくとも移動スケール71は、平行平板である。すなわち、回折格子72が形成されている移動スケール71の上面27Aと、その上面27Aと反対側の下面27Bとは、ほぼ平行である。上述のように、上面27Aは、XY平面とほぼ平行である。したがって、上面27Aと下面27BとはXY平面とほぼ平行である。
【0038】
移動スケール71は、反射面76の上方(+Z側)に配置されている。移動スケール71の下面27Bと反射面76とは対向する。反射面76は、上面27A及び下面27Bに対して傾斜している。
【0039】
固定スケール62は、第1基板ステージ1の上方(+Z側)に配置されている。上述のように、固定スケール62は、支持フレーム18に固定されている。固定スケール62は、Y軸方向に長いプレート状の部材である。固定スケール62は、移動スケール71の上面27Aと対向可能な下面74を有する。下面74は、Y軸方向に長く、XY平面とほぼ平行である。Y軸方向に関する固定スケール62の下面74の大きさ(長さ)は、移動スケール71の上面27Aの大きさ(長さ)より大きい(長い)。
【0040】
固定スケール62は、下面74に、Y軸方向を周期方向とする回折格子77を有する。すなわち、固定スケール62は、Y軸方向を周期方向とする一次元格子を含む。固定スケール62は、Y軸方向を周期方向とする回折格子77が形成された反射型のスケールである。
【0041】
上述のように、移動スケール71の上面27A、固定スケール62の下面74及びガイド面11のそれぞれは、XY平面とほぼ平行であり、移動スケール71の上面27Aと固定スケール62の下面74とガイド面11とは、ほぼ平行である。
【0042】
エンコーダ本体52は、移動スケール71の上面27Aに配置された回折格子72に照射するための光を射出する光源73と、光源73からの光が入射するビームスプリッタ78と、ビームスプリッタ78からの光を検出する検出器75とを備えている。本実施形態において、光源73を含むエンコーダ本体52は、所定の支持機構に支持されて、所定位置に固定されている。したがって、本実施形態において、光源73と固定スケール62との位置関係は固定されている。
【0043】
光源73は、例えばコヒーレントな光、例えば波長λ(=850nm)のレーザ光を、Y軸方向とほぼ平行に射出する。ビームスプリッタ78は、光源73と反射面76との間に配置されており、光源73から射出された光は、ビームスプリッタ78を透過して、反射面76に入射する。反射面76は、光源73からの光を反射して、移動スケール71の下面27Bに導く。下面27Bに入射した光は、移動スケール71を透過して、上面27Aの回折格子72に照射される。このように、本実施形態においては、光源73は、反射面76を介して、移動スケール71の上面27Aに配置された回折格子72に光を照射する。
【0044】
回折格子72で回折された光の少なくとも一部は、その回折格子72の上方に配置されている固定スケール62の下面74に入射する。固定スケール62の回折格子77は、入射した光を回折して(反射して)、移動スケール71の回折格子72に戻す。回折格子72より戻されて回折格子72に再度照射された光は、移動スケール71を介して、反射面76に入射し、その反射面76で反射して、ビームスプリッタ78に入射する。ビームスプリッタ78に入射した光は、そのビームスプリッタ78で反射して、検出器75に入射する。検出器75は、ビームスプリッタ78からの光を受光する。
【0045】
次に、図6を参照して、エンコーダシステム50の原理について説明する。図6に示すように、エンコーダ本体52において、光源73から射出された光は、ビームスプリッタ78を透過して、透過型の移動スケール71に入射する。そして、移動スケール71上に形成された回折格子72によって、次数が異なる複数の回折光が生成される。ここでは、説明を簡単にするために、回折格子72が+1次回折光及び−1次回折光を生成するものとする。
【0046】
回折格子72で生成された+1次回折光及び−1次回折光は、回折格子77を含む固定スケール62の下面74に入射する。固定スケール62は、下面74に入射した回折光を更に回折する。すなわち、固定スケール62は、移動スケール71で生成された−1次回折光を更に回折して+1次回折光を生成し、移動スケール71で生成された+1次回折光を更に回折して−1次回折光を生成する。
【0047】
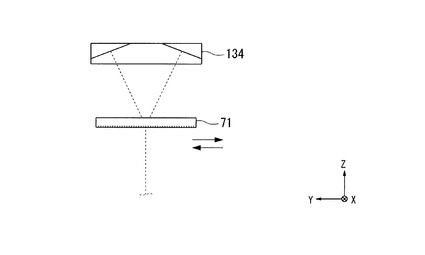
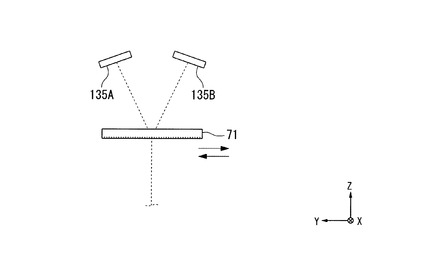
なお、回折格子77を有する固定スケール62に代えて、図7に示すようなプリズム134、あるいは図8に示すような反射ミラー135A、135Bなどの固定光学素子を用いることとしても良い。
【0048】
固定スケール62で生成された+1次回折光及び−1次回折光は、移動スケール71に向かって進行し、回折格子72が形成されている移動スケール71の上面27Aの同一位置で互いに重なり合う。すなわち、固定スケール62からの+1次回折光及び−1次回折光が、移動スケール71上で干渉する。
【0049】
そして、移動スケール71上で干渉した干渉光は、反射面76を介してビームスプリッタ78に入射し、そのビームスプリッタ78を介して検出器75に入射する。検出器75は、干渉光を受光する。
【0050】
上述の構成を有するエンコーダシステム50において、第1基板ステージ1のY軸方向の移動に伴って、固定スケール62に対する光源73からの光の入射位置が変化するため、検出器75で検出される干渉光の光量分布が変化する。光源73から射出される光の波長と移動スケール71の回折格子72のピッチとに応じて、回折格子72で発生する各回折光の回折角度が決定される。また、光源73から射出される光の波長と固定スケール62の回折格子77のピッチとに応じて、固定スケール62で発生した±1次回折光の回折角度(すなわち、移動スケール71で発生した±1次回折光の見かけ上の折り曲げ角度)が決定される。光源73から射出される光の波長、移動スケール71の回折格子72のピッチ及び固定スケール62の回折格子77のピッチを調整することによって、検出器75に正弦波状の干渉光の光量分布を生成することができる。したがって、検出器75は、干渉光の光量分布を検出することにより、第1基板ステージ1のY軸方向に関する位置情報を計測することができる。
【0051】
このように、本実施形態のエンコーダシステム50は、第1基板ステージ1のY軸方向に関する位置情報を形成するために、第1基板ステージ1の上面27Aに配置された回折格子72に反射面76を介して光を照射する光源73と、光源73との位置関係が固定で、回折格子72で回折された光が入射する下面74を有し、入射した光を回折又は反射して回折格子72に戻す固定スケール62と、回折格子72を再度介して干渉された干渉光を反射面76を介して検出する検出器75とを備えている。また、本実施形態のエンコーダシステム50においては、回折格子72が配置されている移動スケール71の上面27Aと、回折格子77が配置されている固定スケール62の下面74とはほぼ平行であり、移動スケール71は、透過型の位相格子である。
【0052】
以上、第1基板ステージ1のY軸方向の位置情報を計測するためのYエンコーダ本体52及び固定スケール62について主に説明した。本実施形態においては、例えば図2に示すように、露光ステーションST1に、第1基板ステージ1のX軸方向の位置情報を計測するためのXエンコーダ本体51及び固定スケール61が設けられている。Xエンコーダ本体51及び固定スケール61は、Yエンコーダ本体52及び固定スケール62とほぼ同等の構成を有する。第1基板テーブル23の反射部材23Aの−X側の端には、Xエンコーダ本体51と対向可能で、XZ平面内でXY平面と鋭角で(45度で)交差する反射面76が配置されている。また、その反射面76の上方には、X軸方向を周期方向とする回折格子72を含む移動スケール71が配置されている。また、その移動スケール71の上方には、X軸方向を周期方向とする回折格子77を含む固定スケール61が配置されている。これにより、エンコーダシステム50は、第1基板ステージ1のX軸方向に関する位置情報を計測できる。
【0053】
また、計測ステーションST2のX、Yエンコーダ本体53、54及び固定スケール63、64も、露光ステーションST1のX、Yエンコーダ本体51、52及び固定スケール61、62と同等の構成を有し、反射部材23Aの+X側の端及び+Y側の端には、X、Yエンコーダ本体53、54及び固定スケール63、64に対応する反射面76が配置されている。また、保持部材23Bには、X、Yエンコーダ本体53、54及び固定スケール63、64に対応する移動スケール71が配置されている。したがって、エンコーダシステム50は、計測ステーションST2においても、第1基板ステージ1の位置情報を計測することができる。
【0054】
また、第2基板ステージ2は、第1基板ステージ1と同等の構成なので、エンコーダシステム50は、露光ステーションST1及び計測ステーションST2のそれぞれにおいて、第2基板ステージ2の位置情報を計測することができる。
【0055】
図2に示すように、本実施形態においては、X、Yエンコーダ本体51、52は、XY平面内において、第1光学素子8の光軸と交差するように、光源73より光を射出する。また、X、Yエンコーダ本体53、54は、XY平面内において、第2光学素子15の光軸と交差するように、光源73より光を射出する。
【0056】
また、例えば第1、第2基板ステージ1、2のY軸方向(又はX軸方向)に関する位置情報を計測するエンコーダ本体及び固定スケールを、X軸方向(又はY軸方向)に所定距離隔てて複数(2つ)配置することによって、それら複数のエンコーダ本体の計測結果に基づいて、第1、第2基板ステージ1、2のθZ方向に関する位置情報を計測することができる。また、複数のエンコーダ本体の計測結果を平均化することもできる。
【0057】
このように、第1エンコーダユニット50Aは、露光ステーションST1に配置されている第1、第2基板ステージ1、2のX軸、Y軸及びθZ方向の3つの方向に関する位置情報を計測できる。また、第2エンコーダユニット50Bは、計測ステーションST2に配置されている第1、第2基板ステージ1、2のX軸、Y軸及びθZ方向の3つの方向に関する位置情報を計測できる。
【0058】
制御装置7は、第1エンコーダユニット50Aの計測結果に基づいて、基板ステージ駆動システム5を作動し、露光ステーションST1に存在する、第1、第2基板ステージ1、2(基板P)の位置制御を行うことができる。また、制御装置7は、第2エンコーダユニット50Bの計測結果に基づいて、基板ステージ駆動システム5を作動し、計測ステーションST2に存在する、第1、第2基板ステージ1、2(基板P)の位置制御を行うことができる。
【0059】
アライメントシステム9は、基板Pの位置情報を計測する。第1、第2基板ステージ1、2は、基板Pを保持して、第2光学素子15と対向する第2位置に移動可能である。アライメントシステム9は、基板Pの位置情報を取得するために、第2光学素子15を介して、基板Pのアライメントマーク、又は第1、第2基板テーブル23、29の上面27A、33Aに配置されている基準マークを検出する。
【0060】
フォーカス・レベリング検出システム10は、計測ステーションST2に配置され、第1、第2基板テーブル23、29に保持されている基板Pの表面の面位置情報(Z軸、θX及びθY方向に関する面位置情報)を検出する。図1に示すように、フォーカス・レベリング検出システム10は、計測ステーションST2に配置された第1、第2基板テーブル23、29に保持されている基板Pの表面に斜め方向から検出光を照射する投射装置10Aと、基板Pの表面に照射され、その基板Pの表面で反射した検出光を受光可能な受光装置10Bとを有する。
【0061】
制御装置7は、アライメントシステム9の計測結果及びフォーカス・レベリング検出システム10の検出結果に基づいて、基板ステージ駆動システム5を作動し、第1、第2基板テーブル23、29に保持されている基板Pの位置制御を行う。
【0062】
次に、上述の構成を有する露光装置の動作の一例について説明する。
【0063】
例えば計測ステーションST2に存在する第2基板ステージ2に露光前の基板Pがロードされる。制御装置7は、計測ステーションST2において、第2基板ステージ2に保持されている基板Pの計測処理を開始する。
【0064】
一方、露光ステーションST1には、計測ステーションST2での計測処理を既に終えた基板Pを保持した第1基板ステージ1が配置されている。制御装置7は、露光ステーションST1において、第1基板ステージ1に保持されている基板Pの露光を開始する。本実施形態においては、第1基板ステージ1に保持された基板Pを露光する動作と、第2基板ステージ2に保持された基板Pを計測する動作の少なくとも一部とを並行して行う。
【0065】
制御装置7は、露光ステーションST1において、第1基板ステージ1に保持されている基板Pの液浸露光を実行する。制御装置7は、基板ステージ駆動システム5を用いて、第1領域SP1において第1基板ステージ1を移動しつつ、その第1基板ステージ1に保持されている基板Pを、投影光学系PLと液体LQとを介して露光する。
【0066】
露光ステーションST1において第1基板ステージ1に保持されている基板Pの露光処理が実行されている間、計測ステーションST2において第2基板ステージ2に保持されている基板Pの計測処理が実行される。制御装置7は、計測ステーションST2に配置されている第2基板ステージ2に保持されている基板Pの位置情報を計測する。
【0067】
基板P上には、複数のショット領域が配置されている。基板Pの位置情報は、複数のショット領域のX軸、Y軸及びθZ方向の位置情報を含む。制御装置7は、第2基板ステージ2に保持されている基板P上の複数のショット領域のX軸、Y軸及びθZ方向の位置情報の計測処理を開始する。
【0068】
例えば図2に示すように、制御装置7は、計測ステーションST2において、第2エンコーダユニット50Bで、基板Pを保持した第2基板ステージ2のXY平面内における位置情報を計測しつつ、アライメントシステム9を用いて、第2基板ステージ2の一部に配置されている基準マーク、及び基板Pの各ショット領域に対応するように基板Pに設けられたアライメントマークを検出する。そして、制御装置7は、所定の基準位置に対する基板P上の複数のショット領域のそれぞれの位置情報を演算処理によって求める。制御装置7は、エンコーダシステム50(第2エンコーダユニット50B)によって規定される座標系における、アライメントシステム9の基準位置に対する各ショット領域の位置情報を求める。
【0069】
また、制御装置7は、フォーカス・レベリング検出システム10を用いて、所定の基準面に対する基板Pの面位置情報(Z軸、θX及びθY方向の位置情報)を求める。
【0070】
露光ステーションST1において、第1基板ステージ1に保持されている基板Pの露光処理が完了し、計測ステーションST2において、第2基板ステージ2に保持されている基板Pの計測処理が完了した後、制御装置7は、計測ステーションST2の第2領域SP2から露光ステーションST1の第1領域SP1への第2基板ステージ2の移動を開始する。
【0071】
制御装置7は、第2基板ステージ2を第2領域SP2から第1領域SP1へ移動しているときにも、第1基板ステージ1を第1光学素子8と対向する第1位置に配置する。これにより、第2基板ステージ2が第2領域SP2から第1領域SP1へ移動する動作を実行中においても、液浸空間LSの液体LQは、第1光学素子8と第1基板ステージ1(基板P)との間に保持され続ける。以上の動作により、図9に示すように、露光ステーションST1の第1領域SP1に、第1基板ステージ1と第2基板ステージ2との両方が配置される。
【0072】
次に、制御装置7は、第2基板ステージ2の基板Pを液浸露光するために、基板ステージ駆動システム5を用いて、第1基板ステージ1と第1光学素子8とが対向する状態(第1基板ステージ1と第1光学素子8との間に液体LQが保持されている状態)から、第2基板ステージ2と第1光学素子8とが対向する状態(第2基板ステージ2と第1光学素子8との間に液体LQが保持される状態)に変化させる。本実施形態においては、例えば国際公開第2005/074014号パンフレットに開示されているように、基板ステージ駆動システム5は、第1基板ステージ1及び第2基板ステージ2の少なくとも一方が、第1光学素子8との間で液体LQを保持可能な空間を形成し続けるように、第1基板ステージ1と第2基板ステージ2とを接近又は接触させた状態で移動させる。これにより、制御装置7は、図9に示すような、第1基板ステージ1と第1光学素子8とが対向し、第1基板ステージ1と第1光学素子8との間に液体LQが保持されている状態から、図10に示すような、第2基板ステージ2と第1光学素子8とが対向し、第2基板ステージ2と第1光学素子8との間に液体LQが保持される状態に変化させることができる。
【0073】
その後、制御装置7は、第2基板ステージ2と第1光学素子8とを対向させた状態を維持しつつ、基板ステージ駆動システム5を制御して、第1基板ステージ1を計測ステーションST2に移動する。
【0074】
制御装置7は、露光ステーションST1において、第2基板ステージ2に保持されている基板Pの液浸露光を実行する。制御装置7は、第1エンコーダユニット50Aを用いて、第2基板ステージ2の位置情報を計測し、その計測結果に基づいて、基板ステージ駆動システム5を用いて第2基板ステージ2の位置を制御して、その第2基板ステージ2に保持されている基板Pの複数のショット領域のそれぞれを投影光学系PLと液体LQとを介して順次露光する。また、制御装置7は、アライメントシステム9及びフォーカス・レベリング検出システム10の検出結果を含む計測ステーションST2の計測結果を用いて、露光ステーションST1において第2基板ステージ2の位置を調整しつつ、基板Pを露光する。
【0075】
一方、計測ステーションST2に移動した第1基板ステージ1に保持されている基板Pは、基板交換位置においてアンロードされ、露光前の新たな基板Pが第1基板ステージ1にロードされる。制御装置7は、計測ステーションST2において、第1基板ステージ1にロードされた基板Pの計測処理等を開始する。以下、上述した処理と同様の処理が繰り返される。
【0076】
以上説明したように、本実施形態によれば、エンコーダシステム50を用いて、第1、第2基板ステージ1、2の位置情報を計測できる。本実施形態によれば、光源73と第1、第2基板ステージ1、2とが離れているので、例えば光源73の熱によって、干渉光の光路上の雰囲気の温度揺らぎ(屈折率変動)が発生することを抑制でき、第1、第2基板ステージ1、2の位置情報を精度良く計測できる。また、光源73の熱等に起因する第1、第2基板ステージ1、2の熱変形の発生を抑制できる。したがって、基板Pを良好に露光できる。
【0077】
また、本実施形態においては、上面27A、33Aと下面74とはほぼ平行なので、第1、第2基板ステージ1、2の姿勢(θX及びθY方向の位置)が変化しても、エンコーダシステム50は、第1、第2基板ステージ1、2の位置情報を精度良く計測できる。
【0078】
また、本実施形態においては、固定スケール61、62、63、64を小型化できるので、固定スケール61〜64の作成、設置等を円滑に実行できる。また、固定スケール61〜64を小型化することで、その固定スケール61〜64の変形を抑制できる。したがって、エンコーダシステム50の計測精度の低下を抑制できる。
【0079】
また、本実施形態においては、干渉は±1次回折光という非常に近接した光路を通る光の間で生じるので、周辺雰囲気の温度揺らぎ(屈折率変動)による影響を低減できる。
【0080】
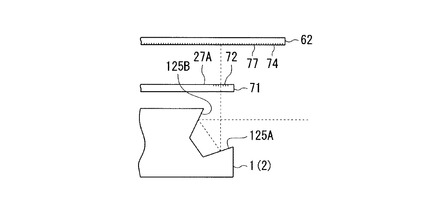
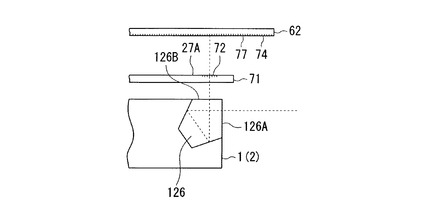
なお、本実施形態においては、第1、第2基板ステージ1、2の端にXY平面に対して傾斜した反射面76を配置する場合について説明したが、これに限らず、図11に示すような構成を採用することも可能である。すなわち、図11に示すように、第1、第2基板ステージ1、2に、二組の反射面125A、125Bを設けることにより、45度傾斜した反射面76と同等の機能を持たせることができる。また、図12に示すように、第1、第2基板ステージ1、2に、透過面126A、126Bを有するプリズム126を設けることとしても良い。
【0081】
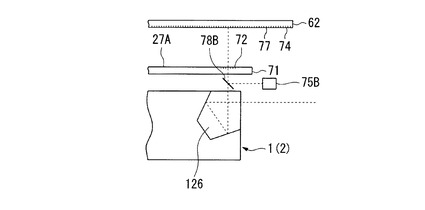
なお、上述の実施形態において、エンコーダシステム50の一部を第1、第2基板ステージ1、2又はその近傍に配置してもよい。例えば、図13に示すように、検出器75Bを、第1、第2基板ステージ1、2の近傍に配置することができる。その場合、検出器75Bは、移動スケール71の回折格子72を再度介して干渉された干渉光を、反射部材の反射面を介さずに検出することができる。図13に示す例では、反射面を有するプリズム126と上面27Aとの間にビームスプリッタ78Bが配置されており、検出器75Bは、移動スケール71の回折格子72を再度介して干渉された干渉光を、ビームスプリッタ78Bを介して検出する。こうすることにより、干渉光が生成される位置と検出器75Bとの距離をより一層近付けることができ、温度揺らぎ(屈折率変動)の影響等を低減できる。
【0082】
なお、上述の実施形態では、±1次回折光を用いて計測を行うこととしたが、これに限らず、±2次、3次…、n次回折光を用いて計測を行うこととしても良い。
【0083】
また、上述の実施形態では、第1、第2基板ステージ1、2の側面に対向して光源73(エンコーダ本体)を配置するものとしたが、例えば光源を第1、第2基板ステージ1、2から十分に離して配置し、光源から射出される光を光学部材(例えば、光ファイバー、及び/又はミラーなど)を用いて伝送することとしてもよい。さらに、複数のエンコーダ本体が設けられる場合、1つの光源からのレーザ光を複数に分岐して各エンコーダ本体に導くようにしても良い。
【0084】
なお、上述の実施形態では、第1、第2基板ステージ1、2の位置情報の計測にエンコーダシステム50を用いた場合について説明したが、これに限らず、マスクステージ3の位置情報の計測に用いることもできる。
【0085】
なお、上述の各実施形態の基板Pとしては、半導体デバイス製造用の半導体ウエハのみならず、ディスプレイデバイス用のガラス基板、薄膜磁気ヘッド用のセラミックウエハ、あるいは露光装置で用いられるマスクまたはレチクルの原版(合成石英、シリコンウエハ)等が適用される。
【0086】
露光装置EXとしては、マスクMと基板Pとを同期移動してマスクMのパターンを走査露光するステップ・アンド・スキャン方式の走査型露光装置(スキャニングステッパ)の他に、マスクMと基板Pとを静止した状態でマスクMのパターンを一括露光し、基板Pを順次ステップ移動させるステップ・アンド・リピート方式の投影露光装置(ステッパ)にも適用することができる。
【0087】
さらに、ステップ・アンド・リピート方式の露光において、第1パターンと基板Pとをほぼ静止した状態で、投影光学系を用いて第1パターンの縮小像を基板P上に転写した後、第2パターンと基板Pとをほぼ静止した状態で、投影光学系を用いて第2パターンの縮小像を第1パターンと部分的に重ねて基板P上に一括露光してもよい(スティッチ方式の一括露光装置)。また、スティッチ方式の露光装置としては、基板P上で少なくとも2つのパターンを部分的に重ねて転写し、基板Pを順次移動させるステップ・アンド・スティッチ方式の露光装置にも適用できる。
【0088】
また、例えば米国特許第第6611316号明細書に開示されているように、2つのマスクのパターンを、投影光学系を介して基板上で合成し、1回の走査露光によって基板上の1つのショット領域をほぼ同時に二重露光する露光装置などにも本発明を適用することができる。また、プロキシミティ方式の露光装置、ミラープロジェクション・アライナーなどにも本発明を適用することができる。また、極端紫外光で基板Pを露光するEUV光光源露光装置にも適用することができる。
【0089】
露光装置EXの種類としては、基板Pに半導体素子パターンを露光する半導体素子製造用の露光装置に限られず、液晶表示素子製造用又はディスプレイ製造用の露光装置や、薄膜磁気ヘッド、撮像素子(CCD)、マイクロマシン、MEMS、DNAチップ、あるいはレチクル又はマスクなどを製造するための露光装置などにも広く適用できる。
【0090】
また、上述の各実施形態では、露光光ELとしてArFエキシマレーザ光を発生する光源装置として、ArFエキシマレーザを用いてもよいが、例えば、米国特許第7023610号明細書に開示されているように、DFB半導体レーザ又はファイバーレーザなどの固体レーザ光源、ファイバーアンプなどを有する光増幅部、及び波長変換部などを含み、波長193nmのパルス光を出力する高調波発生装置を用いてもよい。さらに、上記実施形態では、前述の各照明領域と、投影領域がそれぞれ矩形状であるものとしたが、他の形状、例えば円弧状などでもよい。
【0091】
なお、上述の各実施形態においては、光透過性の基板上に所定の遮光パターン(又は位相パターン・減光パターン)を形成した光透過型マスクを用いたが、このマスクに代えて、例えば米国特許第6778257号明細書に開示されているように、露光すべきパターンの電子データに基づいて透過パターン又は反射パターン、あるいは発光パターンを形成する可変成形マスク(電子マスク、アクティブマスク、あるいはイメージジェネレータとも呼ばれる)を用いてもよい。可変成形マスクは、例えば非発光型画像表示素子(空間光変調器)の一種であるDMD(Digital Micro-mirror Device)等を含む。また、可変成形マスクとしては、DMDに限られるものでなく、DMDに代えて、以下に説明する非発光型画像表示素子を用いても良い。ここで、非発光型画像表示素子は、所定方向へ進行する光の振幅(強度)、位相あるいは偏光の状態を空間的に変調する素子であり、透過型空間光変調器としては、透過型液晶表示素子(LCD:Liquid Crystal Display)以外に、エレクトロクロミックディスプレイ(ECD)等が例として挙げられる。また、反射型空間光変調器としては、上述のDMDの他に、反射ミラーアレイ、反射型液晶表示素子、電気泳動ディスプレイ(EPD:Electro Phonetic Display)、電子ペーパー(または電子インク)、光回折型ライトバルブ(Grating Light Valve)等が例として挙げられる。
【0092】
また、非発光型画像表示素子を備える可変成形マスクに代えて、自発光型画像表示素子を含むパターン形成装置を備えるようにしても良い。この場合、照明系は不要となる。ここで自発光型画像表示素子としては、例えば、CRT(Cathode Ray Tube)、無機ELディスプレイ、有機ELディスプレイ(OLED:Organic Light Emitting Diode)、LEDディスプレイ、LDディスプレイ、電界放出ディスプレイ(FED:Field Emission Display)、プラズマディスプレイ(PDP:Plasma Display Panel)等が挙げられる。また、パターン形成装置が備える自発光型画像表示素子として、複数の発光点を有する固体光源チップ、チップを複数個アレイ状に配列した固体光源チップアレイ、または複数の発光点を1枚の基板に作り込んだタイプのもの等を用い、該固体光源チップを電気的に制御してパターンを形成しても良い。なお、固体光源素子は、無機、有機を問わない。
【0093】
上述の各実施形態においては、投影光学系PLを備えた露光装置を例に挙げて説明してきたが、投影光学系PLを用いない露光装置及び露光方法に本発明を適用することができる。このように投影光学系PLを用いない場合であっても、露光光はレンズ等の光学部材を介して基板に照射される。
【0094】
以上のように、本願実施形態の露光装置は、本願請求の範囲に挙げられた各構成要素を含む各種サブシステムを、所定の機械的精度、電気的精度、光学的精度を保つように、組み立てることで製造される。これら各種精度を確保するために、この組み立ての前後には、各種光学系については光学的精度を達成するための調整、各種機械系については機械的精度を達成するための調整、各種電気系については電気的精度を達成するための調整が行われる。各種サブシステムから露光装置への組み立て工程は、各種サブシステム相互の、機械的接続、電気回路の配線接続、気圧回路の配管接続等が含まれる。この各種サブシステムから露光装置への組み立て工程の前に、各サブシステム個々の組み立て工程があることはいうまでもない。各種サブシステムの露光装置への組み立て工程が終了したら、総合調整が行われ、露光装置全体としての各種精度が確保される。なお、露光装置の製造は温度およびクリーン度等が管理されたクリーンルームで行うことが望ましい。
【0095】
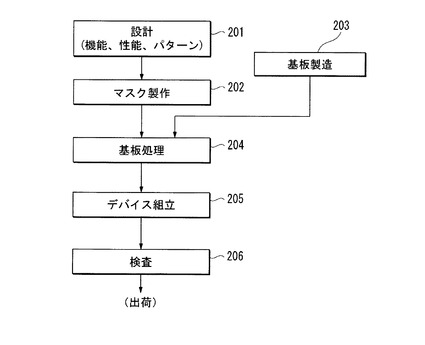
半導体デバイス等のマイクロデバイスは、図14に示すように、マイクロデバイスの機能・性能設計を行うステップ201、この設計ステップに基づいたマスク(レチクル)を製作するステップ202、デバイスの基材である基板を製造するステップ203、上述の実施形態に従って、マスクのパターンを用いて露光光で基板を露光すること、及び露光された基板を現像することを含む基板処理(露光処理)を含む基板処理ステップ204、デバイス組み立てステップ(ダイシング工程、ボンディング工程、パッケージ工程などの加工プロセスを含む)205、検査ステップ206等を経て製造される。
【0096】
なお、上述の実施形態においては、基板ステージが、基板Pに露光光ELを照射してパターンを生成する露光装置に適用される場合を例にして説明したが、本発明の基板ステージ及びその基板ステージの位置情報を計測するエンコーダシステムは、基板にパターンを形成する種々のパターン形成装置に適用可能である。そのようなパターン形成装置としては、例えばインクの滴を基板に吐出することによってその基板にパターンを形成するインクジェット装置、凹凸パターンが形成された原版と有機材料が塗布された基板とを基板のガラス転移温度以上に加熱しながら押し当て、その後、原版と基板とを離すとともに基板を冷却して基板に原版のパターンを転写するナノインプリント装置などが挙げられる。これらの装置に基板を保持する基板ステージが設けられている場合には、本発明のエンコーダシステムを適用することによって、パターンを良好に形成することができる。
【0097】
なお、上述の各実施形態の要件は、適宜組み合わせることができる。また、上述の各実施形態及び変形例で引用した露光装置などに関する全ての公開公報及び米国特許の開示を援用して本文の記載の一部とする。
【符号の説明】
【0098】
1…第1基板ステージ、2…第2基板ステージ、5…基板ステージ駆動システム、8…第1光学素子、11…ガイド面、15…第2光学素子、23…第1基板テーブル、23A…反射部材、23B…保持部材、23H…基板ホルダ、27A…上面、50…エンコーダシステム、50A…第1エンコーダユニット、50B…第2エンコーダユニット、51〜54…エンコーダ本体、61〜64…固定スケール、71…移動スケール、72…回折格子、73…光源、74…下面、75、75B…検出器、76…反射面、77…回折格子、78、78B…ビームスプリッタ、EL…露光光、EX…露光装置、P…基板、SP1…第1領域、SP2…第2領域、ST1…露光ステーション、ST2…計測ステーション
【技術分野】
【0001】
本発明は、移動体の位置情報を計測する位置計測装置及び位置計測方法、基板にパターンを形成するパターン形成装置及びパターン形成方法、基板を露光する露光装置及び露光方法、並びにデバイス製造方法に関する。
【背景技術】
【0002】
半導体デバイス、電子デバイス等のマイクロデバイスの製造工程において、例えば露光装置、インクジェット装置等、基板にデバイスパターンを形成するパターン形成装置が使用される。パターン形成装置は、基板を保持して移動する基板ステージ等の移動体を備え、その移動体の位置情報を位置計測装置で計測しながら、基板にデバイスパターンを形成する。下記特許文献には、エンコーダシステムを用いて移動体の位置情報を計測する技術の一例が開示されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】米国特許出願公開第2006/0227309号明細書
【発明の概要】
【発明が解決しようとする課題】
【0004】
エンコーダシステムは、光源から射出された光をスケール板に照射し、そのスケール板を介した光を検出器で検出する。例えば光源等の熱によって、光路上の雰囲気の温度揺らぎ(屈折率変動)が生じると、移動体の位置情報を精確に計測できなくなる可能性がある。また、熱によって移動体が熱変形すると、その移動体の位置情報が精確に計測できなくなったり、移動体の移動性能が低下したりする可能性がある。その結果、例えばパターン欠陥等、パターン形成不良が発生し、不良デバイスが発生する可能性がある。
【0005】
本発明の態様は、移動体の位置情報を精度良く計測できる位置計測装置及び位置計測方法を提供することを目的とする。また本発明の態様は、パターン形成不良を抑制できるパターン形成装置及びパターン形成方法を提供することを目的とする。また本発明の態様は、露光不良の発生を抑制できる露光装置及び露光方法を提供することを目的とする。また本発明の態様は、不良デバイスの発生を抑制できるデバイス製造方法を提供することを目的とする。
【課題を解決するための手段】
【0006】
本発明の第1の態様に従えば、移動面内を移動する移動体の位置情報を計測する位置計測装置であって、移動体の第1面に配置された移動格子に光を照射する光源と、光源との位置関係が固定で、移動格子で回折された光が入射する第2面を有し、入射した光を回折又は反射して移動格子に戻す固定光学部材と、移動格子を再度介して干渉された光を検出する検出装置と、を備え、第1面と第2面とはほぼ平行である位置計測装置が提供される。
【0007】
本発明の第2の態様に従えば、基板にパターンを形成するパターン形成装置であって、基板を保持して移動可能な移動体の位置情報を計測するために、上述の第1の態様の位置計測装置を備えたパターン形成装置が提供される。
【0008】
本発明の第3の態様に従えば、基板を露光光で露光する露光装置であって、基板を保持して移動可能な移動体の位置情報を計測するために、上述の第1の態様の位置計測装置を備えた露光装置が提供される。
【0009】
本発明の第4の態様に従えば、上述の第3の態様の露光装置を用いて基板を露光することと、露光された基板を現像することと、を含むデバイス製造方法が提供される。
【0010】
本発明の第5の態様に従えば、移動面内を移動する移動体の位置情報を計測する位置計測方法であって、移動体の第1面に配置された移動格子に光を照射することと、光源との位置関係が固定で、入射した光を回折又は反射する、第1面とほぼ平行な第2面を有する固定光学部材に、移動格子で回折された光を入射させることと、固定光学部材に入射した光を回折又は反射して、移動格子に戻すことと、移動格子を再度介して干渉された光を検出することと、を含む位置計測方法が提供される。
【0011】
本発明の第6の態様に従えば、基板にパターンを形成するパターン形成方法であって、基板を保持して移動可能な移動体の位置情報を、上述の第5の態様の位置計測方法を用いて計測することと、移動体に保持された基板にパターンを形成することと、を含むパターン形成方法が提供される。
【0012】
本発明の第7の態様に従えば、基板を露光光で露光する露光方法であって、基板を保持して移動可能な移動体の位置情報を、上述の第5の態様の位置計測方法を用いて計測することと、移動体に保持された基板を露光することと、を含む露光方法が提供される。
【0013】
本発明の第8の態様に従えば、上述の第7の態様の露光方法を用いて基板を露光することと、露光された基板を現像することと、を含むデバイス製造方法が提供される。
【発明の効果】
【0014】
本発明によれば、移動体の位置情報を精度良く計測でき、その移動体に保持された基板のパターン形成不良、露光不良を抑制できる。したがって、不良デバイスの発生を抑制できる。
【図面の簡単な説明】
【0015】
【図1】本実施形態に係る露光装置の一例を示す概略構成図である。
【図2】本実施形態に係る第1、第2基板ステージ及び基板ステージ駆動システムを示す平面図である。
【図3】本実施形態に係るエンコーダシステムの一例を説明するための側面図である。
【図4】本実施形態に係るエンコーダシステムの一例を説明するための平面図である。
【図5】本実施形態に係るエンコーダシステムの一例を説明するための斜視図である。
【図6】本実施形態に係るエンコーダシステムの一例を説明するための模式図である。
【図7】本実施形態に係るエンコーダシステムの一例を説明するための模式図である。
【図8】本実施形態に係るエンコーダシステムの一例を説明するための模式図である。
【図9】本実施形態に係る露光装置の動作の一例を説明するための模式図である。
【図10】本実施形態に係る露光装置の動作の一例を説明するための模式図である。
【図11】本実施形態に係るエンコーダシステムの一例を説明するための模式図である。
【図12】本実施形態に係るエンコーダシステムの一例を説明するための模式図である。
【図13】本実施形態に係るエンコーダシステムの一例を説明するための模式図である。
【図14】マイクロデバイスの製造工程の一例を説明するためのフローチャートである。
【発明を実施するための形態】
【0016】
以下、本発明の実施形態について図面を参照しながら説明するが、本発明はこれに限定されない。なお、以下の説明においては、XYZ直交座標系を設定し、このXYZ直交座標系を参照しつつ各部材の位置関係について説明する。水平面内の所定方向をX軸方向、水平面内においてX軸方向と直交する方向をY軸方向、X軸方向及びY軸方向のそれぞれと直交する方向(すなわち鉛直方向)をZ軸方向とする。また、X軸、Y軸及びZ軸まわりの回転(傾斜)方向をそれぞれ、θX、θY及びθZ方向とする。
【0017】
図1は、本実施形態に係る露光装置EXを示す概略構成図である。本実施形態においては、露光装置EXが、例えば米国特許第6341007号明細書、米国特許第6400441号明細書、米国特許第6549269号明細書、米国特許第6590634号明細書、米国特許第6208407号明細書、米国特許第6262796号明細書、米国特許第6674510号明細書、米国特許第6208407号明細書、米国特許第6710849号明細書及び米国特許第6674510号明細書等に開示されているような、基板Pを保持しながら移動可能な複数(2つ)の基板ステージ1、2を備えたツインステージ型の露光装置である場合を例にして説明する。すなわち、本実施形態においては、露光装置EXは、基板Pを保持しながら移動可能な第1基板ステージ1と、第1基板ステージ1と独立して、基板Pを保持しながら移動可能な第2基板ステージ2とを有する。
【0018】
図1において、露光装置EXは、マスクMを保持しながら移動可能なマスクステージ3と、基板Pを保持しながら移動可能な第1基板ステージ1と、第1基板ステージ1と独立して、基板Pを保持しながら移動可能な第2基板ステージ2と、マスクステージ3を移動するマスクステージ駆動システム4と、第1基板ステージ1及び第2基板ステージ2を移動する基板ステージ駆動システム5と、第1基板ステージ1及び第2基板ステージ2を移動可能に支持するガイド面11を有するプレート部材12と、マスクステージ3の位置情報を計測するレーザ干渉計を含む干渉計システム6と、第1基板ステージ1及び第2基板ステージ2の位置情報を計測するエンコーダシステム50と、マスクMを露光光ELで照明する照明系ILと、露光光ELで照明されたマスクMのパターンの像を基板Pに投影する投影光学系PLと、露光装置EX全体の動作を制御する制御装置7とを備えている。
【0019】
また、露光装置EXは、露光光ELが照射される第1位置を含む第1領域SP1を有する露光ステーションST1と、基板Pの位置情報を計測するための第2位置を含み、第1領域SP1と異なる第2領域SP2を有する計測ステーションST2とを備えている。露光ステーションST1は、基板Pの露光を行う。計測ステーションST2は、露光に関する所定の計測及び基板Pの交換を行う。
【0020】
露光ステーションST1には、照明系IL、マスクステージ3及び投影光学系PL等が配置されている。投影光学系PLの複数の光学素子のうち、投影光学系PLの像面に最も近い第1光学素子8は、露光光ELを射出する射出面(下面)を有する。露光光ELが照射される第1位置は、第1光学素子8と対向する位置を含む。
【0021】
計測ステーションST2には、基板Pの位置情報を取得するためのアライメントシステム9、及びフォーカス・レベリング検出システム10等、基板Pの露光に関する計測を実行可能な各種計測システムが配置されている。アライメントシステム9は、第2光学素子15を含む複数の光学素子を有し、それら光学素子を用いて、基板Pの位置情報を取得する。フォーカス・レベリング検出システム10も、複数の光学素子を有し、それら光学素子を用いて、基板Pの位置情報を取得する。基板Pの位置情報を計測するための第2位置は、第2光学素子15と対向する位置を含む。
【0022】
第1、第2基板ステージ1、2のそれぞれは、第1領域SP1及び第2領域SP2を含むガイド面11の所定領域内を、基板Pを保持しながら移動可能である。本実施形態においては、ガイド面11は、XY平面とほぼ平行である。第1、第2基板ステージ1、2のそれぞれは、露光ステーションST1と計測ステーションST2との間でガイド面11内を移動可能である。
【0023】
また、本実施形態の露光装置EXは、液体LQを介して露光光ELで基板Pを露光する液浸露光装置である。露光装置EXは、露光光ELの光路の少なくとも一部を液体LQで満たすように、液体LQで液浸空間LSを形成可能なノズル部材(シール部材)14を備えている。液浸空間LSは、液体LQで満たされた空間である。本実施形態においては、液体LQとして、水(純水)を用いる。本実施形態において、ノズル部材14は、例えば米国特許公開第2004/136494号明細書等に開示されているようなシール部材を含む。ノズル部材14は、第1光学素子8の近傍に配置されており、第1光学素子8と第1位置に配置された物体との間の露光光ELの光路を液体LQで満たすように液浸空間LSを形成する。第1位置に配置される物体は、第1、第2基板ステージ1、2及び第1、第2基板ステージ1、2に保持される基板Pを含む。少なくとも基板Pの露光時に、ノズル部材14は、投影光学系PLの投影領域を含む基板Pの表面の一部の領域(局所的な領域)が液体LQで覆われるように液浸空間LSを形成する。すなわち、本実施形態の露光装置EXは、局所液浸方式を採用する。
【0024】
本実施形態の露光装置EXは、マスクMと基板Pとを所定の走査方向に同期移動しつつ、マスクMのパターンの像を基板Pに投影する走査型露光装置(所謂スキャニングステッパ)である。露光装置EXは、基板Pを投影光学系PLの投影領域に対して所定の走査方向に移動するとともに、その基板Pの移動と同期して、照明系ILの照明領域に対してマスクMを所定の走査方向に移動しつつ、投影光学系PLと液体LQとを介して基板Pを露光光ELで露光する。これにより、マスクMのパターンの像が基板Pに投影される。
【0025】
露光装置EXは、例えばクリーンルーム内の床面上に配置されたコラム16及びコラム16上に防振装置17を介して配置された支持フレーム18を含むボディ19を備えている。コラム16は、防振装置21を介してプレート部材12を支持する支持面20を有する。支持フレーム18は、投影光学系PL、アライメントシステム9及びフォーカス・レベリング検出システム10等を支持する。
【0026】
照明系ILは、マスクM上の所定の照明領域を均一な照度分布の露光光ELで照明する。照明系ILから射出される露光光ELとしては、例えば水銀ランプから射出される輝線(g線、h線、i線)及びKrFエキシマレーザ光(波長248nm)等の遠紫外光(DUV光)、ArFエキシマレーザ光(波長193nm)及びF2レーザ光(波長157nm)等の真空紫外光(VUV光)等が用いられる。本実施形態においては、露光光ELとして、ArFエキシマレーザ光が用いられる。
【0027】
マスクステージ3は、リニアモータ等のアクチュエータを含むマスクステージ駆動システム4により、マスクMを保持しながら、X軸、Y軸及びθZ方向の3つの方向に移動可能である。マスクステージ3(マスクM)の位置情報は、干渉計システム6のレーザ干渉計によって計測される。レーザ干渉計は、マスクステージ3に設けられた計測ミラー3Rを用いて、マスクステージ3のX軸、Y軸及びθZ方向の3つの方向に関する位置情報を計測する。制御装置7は、干渉計システム6の計測結果に基づいて、マスクステージ駆動システム4を作動し、マスクステージ3(マスクM)の位置制御を行う。
【0028】
投影光学系PLは、マスクMのパターンの像を所定の投影倍率で基板Pに投影する。投影光学系PLの複数の光学素子は鏡筒で保持されている。本実施形態の投影光学系PLは、その投影倍率が例えば1/4、1/5、1/8等の縮小系である。なお、投影光学系PLは等倍系及び拡大系のいずれでもよい。本実施形態においては、投影光学系PLの光軸AXはZ軸方向と平行である。また、投影光学系PLは、反射光学素子を含まない屈折系、屈折光学素子を含まない反射系、反射光学素子と屈折光学素子とを含む反射屈折系のいずれであってもよい。また、投影光学系PLは、倒立像と正立像とのいずれを形成してもよい。
【0029】
次に、図1、図2及び図3を参照しながら、第1、第2基板ステージ1、2及び基板ステージ駆動システム5について説明する。図2は、第1、第2基板ステージ1、2及び基板ステージ駆動システム5を上方から見た平面図、図3は、露光ステーションST1に配置されている第1基板ステージ1の近傍を示す側面図である。
【0030】
第1基板ステージ1は、ステージ本体22と、ステージ本体22に支持され、基板Pを着脱可能な基板ホルダ23Hを有する第1基板テーブル23とを有する。ステージ本体22の下面には、例えば国際公開第2006/009254号パンフレットに開示されているような、気体軸受を形成可能な支持装置25が設けられている。第1基板ステージ1は、支持装置25によって形成された気体軸受によって、ガイド面11に非接触で支持される。第1基板テーブル23は、凹部23Cを有する。基板ホルダ23Hは、凹部23Cに配置されている。基板ホルダ23Hは、基板Pの表面とXY平面とがほぼ平行になるように、基板Pを保持する。第1基板テーブル23は、凹部23Cの周囲に配置された上面27Aを有する。上面27Aは、ほぼ平坦である。基板ホルダ23Hに保持された基板Pの表面と、上面27Aとは、ほぼ同一平面内に配置される(面一である)。第1基板ステージ1は、基板ステージ駆動システム5により、基板Pを保持しながら、X軸、Y軸、Z軸、θX、θY及びθZ方向の6つの方向に移動可能である。
【0031】
第2基板ステージ2は、ステージ本体28と、ステージ本体28に支持され、基板Pを着脱可能な基板ホルダ29Hを有する第2基板テーブル29とを有する。ステージ本体28の下面には、例えば国際公開第2006/009254号パンフレットに開示されているような、気体軸受を形成可能な支持装置31が設けられている。第2基板ステージ2は、支持装置31によって形成された気体軸受によって、ガイド面11に非接触で支持される。第2基板テーブル29は、凹部29Cを有する。基板ホルダ29Hは、凹部29Cに配置されている。基板ホルダ29Hは、基板Pの表面とXY平面とがほぼ平行になるように、基板Pを保持する。第2基板テーブル29は、凹部29Cの周囲に配置された上面33Aを有する。上面33Aは、ほぼ平坦である。基板ホルダ29Hに保持された基板Pの表面と、上面33Aとは、ほぼ同一平面内に配置される(面一である)。第2基板ステージ2は、基板ステージ駆動システム5により、基板Pを保持しながら、X軸、Y軸、Z軸、θX、θY及びθZ方向の6つの方向に移動可能である。
【0032】
基板ステージ駆動システム5は、リニアモータ等のアクチュエータを含み、第1基板ステージ1及び第2基板ステージ2のそれぞれを移動可能である。基板ステージ駆動システム5は、ステージ本体22及びステージ本体28のそれぞれをX軸、Y軸及びθZ方向に移動する粗動システムと、ステージ本体22に対して第1基板テーブル23をZ軸、θX及びθY方向に移動する微動システムと、ステージ本体28に対して第2基板テーブル29をZ軸、θX及びθY方向に移動する微動システムとを含む。第1、第2基板ステージ1、2は、粗動システムによって、露光ステーションST1と計測ステーションST2とを移動可能である。第1、第2基板テーブル23、29のそれぞれは、粗動システム及び微動システムによって、X軸、Y軸、Z軸、θX、θY及びθZ方向の6つの方向に移動可能である。
【0033】
次に、第1、第2基板ステージ1、2の位置情報を計測するエンコーダシステム50の一例について説明する。エンコーダシステム50は、露光ステーションST1に配置されている第1、第2基板ステージ1、2の位置情報を計測する第1エンコーダユニット50Aと、計測ステーションST2に配置されている第1、第2基板ステージ1、2の位置情報を計測する第2エンコーダユニット50Bとを備えている。第1エンコーダユニット50Aは、第1、第2基板ステージ1、2のX軸方向に関する位置情報を計測するXエンコーダ本体51と、Y軸方向に関する位置情報を計測するYエンコーダ本体52とを含む。第2エンコーダユニット50Bは、第1、第2基板ステージ1、2のX軸方向に関する位置情報を計測するXエンコーダ本体53と、Y軸方向に関する位置情報を計測するYエンコーダ本体54とを含む。
【0034】
また、エンコーダシステム50は、各エンコーダ本体51、52、53、54と対応するように所定位置に配置された固定スケール61、62、63、64を備えている。固定スケール61、62は、露光ステーションST1に配置されている。固定スケール63、64は、計測ステーションST2に配置されている。本実施形態において、固定スケール61、62、63、64のそれぞれは、支持フレーム18に支持されている。固定スケール61、62、63、64は、例えばセラミックス、又は低膨張ガラス等、同一の材料で形成されている。
【0035】
各エンコーダ本体51〜54は、ほぼ同等の構成を有する。また、各固定スケール61〜64も、ほぼ同等の構成を有する。以下、Yエンコーダ本体52及びそのYエンコーダ本体52に対応する固定スケール62について、図3〜図6を参照して説明する。図4は、固定スケール62及び第1基板ステージ1の一部を模式的に示す平面図、図5は、Yエンコーダ本体52及び固定スケール62を示す斜視図、図6は、エンコーダシステム50の原理を説明するための模式図である。
【0036】
本実施形態において、第1基板テーブル23は、ボイスコイルモータ等のアクチュエータを介してステージ本体22上に搭載され、反射面76を有する反射部材23Aと、反射部材23A上に搭載され、基板ホルダ23H及び上面27Aを有する保持部材23Bとを含む。保持部材23Bは、反射部材23Aに固定されている。すなわち、反射部材23Aと保持部材23Bとの位置関係は固定である。反射面76は、第1基板テーブル23の−Y側の端に配置されている。反射面76は、エンコーダ本体52と対向可能である。反射面76は、例えばアルミニウムの膜によって形成されている。反射面76は、YZ平面内でXY平面と鋭角で交差している。本実施形態において、反射面76は、XY平面に対して45度傾斜している。
【0037】
保持部材23Bは、基板Pを保持する基板ホルダ23Hと、基板ホルダ23Hの周囲に配置された上面27Aと、上面27Aに形成された回折格子72を含む移動スケール71とを備えている。本実施形態において、回折格子72は、Y軸方向を周期方向とする一次元格子である。本実施形態において、移動スケール71は、保持部材23Bの一部を形成する。移動スケール71は、透明である。すなわち、移動スケール71は、保持部材23Bの一部に配置された、Y軸方向を周期方向とする回折格子72が形成された透過型の位相格子である。保持部材23Bのうち、少なくとも移動スケール71は、平行平板である。すなわち、回折格子72が形成されている移動スケール71の上面27Aと、その上面27Aと反対側の下面27Bとは、ほぼ平行である。上述のように、上面27Aは、XY平面とほぼ平行である。したがって、上面27Aと下面27BとはXY平面とほぼ平行である。
【0038】
移動スケール71は、反射面76の上方(+Z側)に配置されている。移動スケール71の下面27Bと反射面76とは対向する。反射面76は、上面27A及び下面27Bに対して傾斜している。
【0039】
固定スケール62は、第1基板ステージ1の上方(+Z側)に配置されている。上述のように、固定スケール62は、支持フレーム18に固定されている。固定スケール62は、Y軸方向に長いプレート状の部材である。固定スケール62は、移動スケール71の上面27Aと対向可能な下面74を有する。下面74は、Y軸方向に長く、XY平面とほぼ平行である。Y軸方向に関する固定スケール62の下面74の大きさ(長さ)は、移動スケール71の上面27Aの大きさ(長さ)より大きい(長い)。
【0040】
固定スケール62は、下面74に、Y軸方向を周期方向とする回折格子77を有する。すなわち、固定スケール62は、Y軸方向を周期方向とする一次元格子を含む。固定スケール62は、Y軸方向を周期方向とする回折格子77が形成された反射型のスケールである。
【0041】
上述のように、移動スケール71の上面27A、固定スケール62の下面74及びガイド面11のそれぞれは、XY平面とほぼ平行であり、移動スケール71の上面27Aと固定スケール62の下面74とガイド面11とは、ほぼ平行である。
【0042】
エンコーダ本体52は、移動スケール71の上面27Aに配置された回折格子72に照射するための光を射出する光源73と、光源73からの光が入射するビームスプリッタ78と、ビームスプリッタ78からの光を検出する検出器75とを備えている。本実施形態において、光源73を含むエンコーダ本体52は、所定の支持機構に支持されて、所定位置に固定されている。したがって、本実施形態において、光源73と固定スケール62との位置関係は固定されている。
【0043】
光源73は、例えばコヒーレントな光、例えば波長λ(=850nm)のレーザ光を、Y軸方向とほぼ平行に射出する。ビームスプリッタ78は、光源73と反射面76との間に配置されており、光源73から射出された光は、ビームスプリッタ78を透過して、反射面76に入射する。反射面76は、光源73からの光を反射して、移動スケール71の下面27Bに導く。下面27Bに入射した光は、移動スケール71を透過して、上面27Aの回折格子72に照射される。このように、本実施形態においては、光源73は、反射面76を介して、移動スケール71の上面27Aに配置された回折格子72に光を照射する。
【0044】
回折格子72で回折された光の少なくとも一部は、その回折格子72の上方に配置されている固定スケール62の下面74に入射する。固定スケール62の回折格子77は、入射した光を回折して(反射して)、移動スケール71の回折格子72に戻す。回折格子72より戻されて回折格子72に再度照射された光は、移動スケール71を介して、反射面76に入射し、その反射面76で反射して、ビームスプリッタ78に入射する。ビームスプリッタ78に入射した光は、そのビームスプリッタ78で反射して、検出器75に入射する。検出器75は、ビームスプリッタ78からの光を受光する。
【0045】
次に、図6を参照して、エンコーダシステム50の原理について説明する。図6に示すように、エンコーダ本体52において、光源73から射出された光は、ビームスプリッタ78を透過して、透過型の移動スケール71に入射する。そして、移動スケール71上に形成された回折格子72によって、次数が異なる複数の回折光が生成される。ここでは、説明を簡単にするために、回折格子72が+1次回折光及び−1次回折光を生成するものとする。
【0046】
回折格子72で生成された+1次回折光及び−1次回折光は、回折格子77を含む固定スケール62の下面74に入射する。固定スケール62は、下面74に入射した回折光を更に回折する。すなわち、固定スケール62は、移動スケール71で生成された−1次回折光を更に回折して+1次回折光を生成し、移動スケール71で生成された+1次回折光を更に回折して−1次回折光を生成する。
【0047】
なお、回折格子77を有する固定スケール62に代えて、図7に示すようなプリズム134、あるいは図8に示すような反射ミラー135A、135Bなどの固定光学素子を用いることとしても良い。
【0048】
固定スケール62で生成された+1次回折光及び−1次回折光は、移動スケール71に向かって進行し、回折格子72が形成されている移動スケール71の上面27Aの同一位置で互いに重なり合う。すなわち、固定スケール62からの+1次回折光及び−1次回折光が、移動スケール71上で干渉する。
【0049】
そして、移動スケール71上で干渉した干渉光は、反射面76を介してビームスプリッタ78に入射し、そのビームスプリッタ78を介して検出器75に入射する。検出器75は、干渉光を受光する。
【0050】
上述の構成を有するエンコーダシステム50において、第1基板ステージ1のY軸方向の移動に伴って、固定スケール62に対する光源73からの光の入射位置が変化するため、検出器75で検出される干渉光の光量分布が変化する。光源73から射出される光の波長と移動スケール71の回折格子72のピッチとに応じて、回折格子72で発生する各回折光の回折角度が決定される。また、光源73から射出される光の波長と固定スケール62の回折格子77のピッチとに応じて、固定スケール62で発生した±1次回折光の回折角度(すなわち、移動スケール71で発生した±1次回折光の見かけ上の折り曲げ角度)が決定される。光源73から射出される光の波長、移動スケール71の回折格子72のピッチ及び固定スケール62の回折格子77のピッチを調整することによって、検出器75に正弦波状の干渉光の光量分布を生成することができる。したがって、検出器75は、干渉光の光量分布を検出することにより、第1基板ステージ1のY軸方向に関する位置情報を計測することができる。
【0051】
このように、本実施形態のエンコーダシステム50は、第1基板ステージ1のY軸方向に関する位置情報を形成するために、第1基板ステージ1の上面27Aに配置された回折格子72に反射面76を介して光を照射する光源73と、光源73との位置関係が固定で、回折格子72で回折された光が入射する下面74を有し、入射した光を回折又は反射して回折格子72に戻す固定スケール62と、回折格子72を再度介して干渉された干渉光を反射面76を介して検出する検出器75とを備えている。また、本実施形態のエンコーダシステム50においては、回折格子72が配置されている移動スケール71の上面27Aと、回折格子77が配置されている固定スケール62の下面74とはほぼ平行であり、移動スケール71は、透過型の位相格子である。
【0052】
以上、第1基板ステージ1のY軸方向の位置情報を計測するためのYエンコーダ本体52及び固定スケール62について主に説明した。本実施形態においては、例えば図2に示すように、露光ステーションST1に、第1基板ステージ1のX軸方向の位置情報を計測するためのXエンコーダ本体51及び固定スケール61が設けられている。Xエンコーダ本体51及び固定スケール61は、Yエンコーダ本体52及び固定スケール62とほぼ同等の構成を有する。第1基板テーブル23の反射部材23Aの−X側の端には、Xエンコーダ本体51と対向可能で、XZ平面内でXY平面と鋭角で(45度で)交差する反射面76が配置されている。また、その反射面76の上方には、X軸方向を周期方向とする回折格子72を含む移動スケール71が配置されている。また、その移動スケール71の上方には、X軸方向を周期方向とする回折格子77を含む固定スケール61が配置されている。これにより、エンコーダシステム50は、第1基板ステージ1のX軸方向に関する位置情報を計測できる。
【0053】
また、計測ステーションST2のX、Yエンコーダ本体53、54及び固定スケール63、64も、露光ステーションST1のX、Yエンコーダ本体51、52及び固定スケール61、62と同等の構成を有し、反射部材23Aの+X側の端及び+Y側の端には、X、Yエンコーダ本体53、54及び固定スケール63、64に対応する反射面76が配置されている。また、保持部材23Bには、X、Yエンコーダ本体53、54及び固定スケール63、64に対応する移動スケール71が配置されている。したがって、エンコーダシステム50は、計測ステーションST2においても、第1基板ステージ1の位置情報を計測することができる。
【0054】
また、第2基板ステージ2は、第1基板ステージ1と同等の構成なので、エンコーダシステム50は、露光ステーションST1及び計測ステーションST2のそれぞれにおいて、第2基板ステージ2の位置情報を計測することができる。
【0055】
図2に示すように、本実施形態においては、X、Yエンコーダ本体51、52は、XY平面内において、第1光学素子8の光軸と交差するように、光源73より光を射出する。また、X、Yエンコーダ本体53、54は、XY平面内において、第2光学素子15の光軸と交差するように、光源73より光を射出する。
【0056】
また、例えば第1、第2基板ステージ1、2のY軸方向(又はX軸方向)に関する位置情報を計測するエンコーダ本体及び固定スケールを、X軸方向(又はY軸方向)に所定距離隔てて複数(2つ)配置することによって、それら複数のエンコーダ本体の計測結果に基づいて、第1、第2基板ステージ1、2のθZ方向に関する位置情報を計測することができる。また、複数のエンコーダ本体の計測結果を平均化することもできる。
【0057】
このように、第1エンコーダユニット50Aは、露光ステーションST1に配置されている第1、第2基板ステージ1、2のX軸、Y軸及びθZ方向の3つの方向に関する位置情報を計測できる。また、第2エンコーダユニット50Bは、計測ステーションST2に配置されている第1、第2基板ステージ1、2のX軸、Y軸及びθZ方向の3つの方向に関する位置情報を計測できる。
【0058】
制御装置7は、第1エンコーダユニット50Aの計測結果に基づいて、基板ステージ駆動システム5を作動し、露光ステーションST1に存在する、第1、第2基板ステージ1、2(基板P)の位置制御を行うことができる。また、制御装置7は、第2エンコーダユニット50Bの計測結果に基づいて、基板ステージ駆動システム5を作動し、計測ステーションST2に存在する、第1、第2基板ステージ1、2(基板P)の位置制御を行うことができる。
【0059】
アライメントシステム9は、基板Pの位置情報を計測する。第1、第2基板ステージ1、2は、基板Pを保持して、第2光学素子15と対向する第2位置に移動可能である。アライメントシステム9は、基板Pの位置情報を取得するために、第2光学素子15を介して、基板Pのアライメントマーク、又は第1、第2基板テーブル23、29の上面27A、33Aに配置されている基準マークを検出する。
【0060】
フォーカス・レベリング検出システム10は、計測ステーションST2に配置され、第1、第2基板テーブル23、29に保持されている基板Pの表面の面位置情報(Z軸、θX及びθY方向に関する面位置情報)を検出する。図1に示すように、フォーカス・レベリング検出システム10は、計測ステーションST2に配置された第1、第2基板テーブル23、29に保持されている基板Pの表面に斜め方向から検出光を照射する投射装置10Aと、基板Pの表面に照射され、その基板Pの表面で反射した検出光を受光可能な受光装置10Bとを有する。
【0061】
制御装置7は、アライメントシステム9の計測結果及びフォーカス・レベリング検出システム10の検出結果に基づいて、基板ステージ駆動システム5を作動し、第1、第2基板テーブル23、29に保持されている基板Pの位置制御を行う。
【0062】
次に、上述の構成を有する露光装置の動作の一例について説明する。
【0063】
例えば計測ステーションST2に存在する第2基板ステージ2に露光前の基板Pがロードされる。制御装置7は、計測ステーションST2において、第2基板ステージ2に保持されている基板Pの計測処理を開始する。
【0064】
一方、露光ステーションST1には、計測ステーションST2での計測処理を既に終えた基板Pを保持した第1基板ステージ1が配置されている。制御装置7は、露光ステーションST1において、第1基板ステージ1に保持されている基板Pの露光を開始する。本実施形態においては、第1基板ステージ1に保持された基板Pを露光する動作と、第2基板ステージ2に保持された基板Pを計測する動作の少なくとも一部とを並行して行う。
【0065】
制御装置7は、露光ステーションST1において、第1基板ステージ1に保持されている基板Pの液浸露光を実行する。制御装置7は、基板ステージ駆動システム5を用いて、第1領域SP1において第1基板ステージ1を移動しつつ、その第1基板ステージ1に保持されている基板Pを、投影光学系PLと液体LQとを介して露光する。
【0066】
露光ステーションST1において第1基板ステージ1に保持されている基板Pの露光処理が実行されている間、計測ステーションST2において第2基板ステージ2に保持されている基板Pの計測処理が実行される。制御装置7は、計測ステーションST2に配置されている第2基板ステージ2に保持されている基板Pの位置情報を計測する。
【0067】
基板P上には、複数のショット領域が配置されている。基板Pの位置情報は、複数のショット領域のX軸、Y軸及びθZ方向の位置情報を含む。制御装置7は、第2基板ステージ2に保持されている基板P上の複数のショット領域のX軸、Y軸及びθZ方向の位置情報の計測処理を開始する。
【0068】
例えば図2に示すように、制御装置7は、計測ステーションST2において、第2エンコーダユニット50Bで、基板Pを保持した第2基板ステージ2のXY平面内における位置情報を計測しつつ、アライメントシステム9を用いて、第2基板ステージ2の一部に配置されている基準マーク、及び基板Pの各ショット領域に対応するように基板Pに設けられたアライメントマークを検出する。そして、制御装置7は、所定の基準位置に対する基板P上の複数のショット領域のそれぞれの位置情報を演算処理によって求める。制御装置7は、エンコーダシステム50(第2エンコーダユニット50B)によって規定される座標系における、アライメントシステム9の基準位置に対する各ショット領域の位置情報を求める。
【0069】
また、制御装置7は、フォーカス・レベリング検出システム10を用いて、所定の基準面に対する基板Pの面位置情報(Z軸、θX及びθY方向の位置情報)を求める。
【0070】
露光ステーションST1において、第1基板ステージ1に保持されている基板Pの露光処理が完了し、計測ステーションST2において、第2基板ステージ2に保持されている基板Pの計測処理が完了した後、制御装置7は、計測ステーションST2の第2領域SP2から露光ステーションST1の第1領域SP1への第2基板ステージ2の移動を開始する。
【0071】
制御装置7は、第2基板ステージ2を第2領域SP2から第1領域SP1へ移動しているときにも、第1基板ステージ1を第1光学素子8と対向する第1位置に配置する。これにより、第2基板ステージ2が第2領域SP2から第1領域SP1へ移動する動作を実行中においても、液浸空間LSの液体LQは、第1光学素子8と第1基板ステージ1(基板P)との間に保持され続ける。以上の動作により、図9に示すように、露光ステーションST1の第1領域SP1に、第1基板ステージ1と第2基板ステージ2との両方が配置される。
【0072】
次に、制御装置7は、第2基板ステージ2の基板Pを液浸露光するために、基板ステージ駆動システム5を用いて、第1基板ステージ1と第1光学素子8とが対向する状態(第1基板ステージ1と第1光学素子8との間に液体LQが保持されている状態)から、第2基板ステージ2と第1光学素子8とが対向する状態(第2基板ステージ2と第1光学素子8との間に液体LQが保持される状態)に変化させる。本実施形態においては、例えば国際公開第2005/074014号パンフレットに開示されているように、基板ステージ駆動システム5は、第1基板ステージ1及び第2基板ステージ2の少なくとも一方が、第1光学素子8との間で液体LQを保持可能な空間を形成し続けるように、第1基板ステージ1と第2基板ステージ2とを接近又は接触させた状態で移動させる。これにより、制御装置7は、図9に示すような、第1基板ステージ1と第1光学素子8とが対向し、第1基板ステージ1と第1光学素子8との間に液体LQが保持されている状態から、図10に示すような、第2基板ステージ2と第1光学素子8とが対向し、第2基板ステージ2と第1光学素子8との間に液体LQが保持される状態に変化させることができる。
【0073】
その後、制御装置7は、第2基板ステージ2と第1光学素子8とを対向させた状態を維持しつつ、基板ステージ駆動システム5を制御して、第1基板ステージ1を計測ステーションST2に移動する。
【0074】
制御装置7は、露光ステーションST1において、第2基板ステージ2に保持されている基板Pの液浸露光を実行する。制御装置7は、第1エンコーダユニット50Aを用いて、第2基板ステージ2の位置情報を計測し、その計測結果に基づいて、基板ステージ駆動システム5を用いて第2基板ステージ2の位置を制御して、その第2基板ステージ2に保持されている基板Pの複数のショット領域のそれぞれを投影光学系PLと液体LQとを介して順次露光する。また、制御装置7は、アライメントシステム9及びフォーカス・レベリング検出システム10の検出結果を含む計測ステーションST2の計測結果を用いて、露光ステーションST1において第2基板ステージ2の位置を調整しつつ、基板Pを露光する。
【0075】
一方、計測ステーションST2に移動した第1基板ステージ1に保持されている基板Pは、基板交換位置においてアンロードされ、露光前の新たな基板Pが第1基板ステージ1にロードされる。制御装置7は、計測ステーションST2において、第1基板ステージ1にロードされた基板Pの計測処理等を開始する。以下、上述した処理と同様の処理が繰り返される。
【0076】
以上説明したように、本実施形態によれば、エンコーダシステム50を用いて、第1、第2基板ステージ1、2の位置情報を計測できる。本実施形態によれば、光源73と第1、第2基板ステージ1、2とが離れているので、例えば光源73の熱によって、干渉光の光路上の雰囲気の温度揺らぎ(屈折率変動)が発生することを抑制でき、第1、第2基板ステージ1、2の位置情報を精度良く計測できる。また、光源73の熱等に起因する第1、第2基板ステージ1、2の熱変形の発生を抑制できる。したがって、基板Pを良好に露光できる。
【0077】
また、本実施形態においては、上面27A、33Aと下面74とはほぼ平行なので、第1、第2基板ステージ1、2の姿勢(θX及びθY方向の位置)が変化しても、エンコーダシステム50は、第1、第2基板ステージ1、2の位置情報を精度良く計測できる。
【0078】
また、本実施形態においては、固定スケール61、62、63、64を小型化できるので、固定スケール61〜64の作成、設置等を円滑に実行できる。また、固定スケール61〜64を小型化することで、その固定スケール61〜64の変形を抑制できる。したがって、エンコーダシステム50の計測精度の低下を抑制できる。
【0079】
また、本実施形態においては、干渉は±1次回折光という非常に近接した光路を通る光の間で生じるので、周辺雰囲気の温度揺らぎ(屈折率変動)による影響を低減できる。
【0080】
なお、本実施形態においては、第1、第2基板ステージ1、2の端にXY平面に対して傾斜した反射面76を配置する場合について説明したが、これに限らず、図11に示すような構成を採用することも可能である。すなわち、図11に示すように、第1、第2基板ステージ1、2に、二組の反射面125A、125Bを設けることにより、45度傾斜した反射面76と同等の機能を持たせることができる。また、図12に示すように、第1、第2基板ステージ1、2に、透過面126A、126Bを有するプリズム126を設けることとしても良い。
【0081】
なお、上述の実施形態において、エンコーダシステム50の一部を第1、第2基板ステージ1、2又はその近傍に配置してもよい。例えば、図13に示すように、検出器75Bを、第1、第2基板ステージ1、2の近傍に配置することができる。その場合、検出器75Bは、移動スケール71の回折格子72を再度介して干渉された干渉光を、反射部材の反射面を介さずに検出することができる。図13に示す例では、反射面を有するプリズム126と上面27Aとの間にビームスプリッタ78Bが配置されており、検出器75Bは、移動スケール71の回折格子72を再度介して干渉された干渉光を、ビームスプリッタ78Bを介して検出する。こうすることにより、干渉光が生成される位置と検出器75Bとの距離をより一層近付けることができ、温度揺らぎ(屈折率変動)の影響等を低減できる。
【0082】
なお、上述の実施形態では、±1次回折光を用いて計測を行うこととしたが、これに限らず、±2次、3次…、n次回折光を用いて計測を行うこととしても良い。
【0083】
また、上述の実施形態では、第1、第2基板ステージ1、2の側面に対向して光源73(エンコーダ本体)を配置するものとしたが、例えば光源を第1、第2基板ステージ1、2から十分に離して配置し、光源から射出される光を光学部材(例えば、光ファイバー、及び/又はミラーなど)を用いて伝送することとしてもよい。さらに、複数のエンコーダ本体が設けられる場合、1つの光源からのレーザ光を複数に分岐して各エンコーダ本体に導くようにしても良い。
【0084】
なお、上述の実施形態では、第1、第2基板ステージ1、2の位置情報の計測にエンコーダシステム50を用いた場合について説明したが、これに限らず、マスクステージ3の位置情報の計測に用いることもできる。
【0085】
なお、上述の各実施形態の基板Pとしては、半導体デバイス製造用の半導体ウエハのみならず、ディスプレイデバイス用のガラス基板、薄膜磁気ヘッド用のセラミックウエハ、あるいは露光装置で用いられるマスクまたはレチクルの原版(合成石英、シリコンウエハ)等が適用される。
【0086】
露光装置EXとしては、マスクMと基板Pとを同期移動してマスクMのパターンを走査露光するステップ・アンド・スキャン方式の走査型露光装置(スキャニングステッパ)の他に、マスクMと基板Pとを静止した状態でマスクMのパターンを一括露光し、基板Pを順次ステップ移動させるステップ・アンド・リピート方式の投影露光装置(ステッパ)にも適用することができる。
【0087】
さらに、ステップ・アンド・リピート方式の露光において、第1パターンと基板Pとをほぼ静止した状態で、投影光学系を用いて第1パターンの縮小像を基板P上に転写した後、第2パターンと基板Pとをほぼ静止した状態で、投影光学系を用いて第2パターンの縮小像を第1パターンと部分的に重ねて基板P上に一括露光してもよい(スティッチ方式の一括露光装置)。また、スティッチ方式の露光装置としては、基板P上で少なくとも2つのパターンを部分的に重ねて転写し、基板Pを順次移動させるステップ・アンド・スティッチ方式の露光装置にも適用できる。
【0088】
また、例えば米国特許第第6611316号明細書に開示されているように、2つのマスクのパターンを、投影光学系を介して基板上で合成し、1回の走査露光によって基板上の1つのショット領域をほぼ同時に二重露光する露光装置などにも本発明を適用することができる。また、プロキシミティ方式の露光装置、ミラープロジェクション・アライナーなどにも本発明を適用することができる。また、極端紫外光で基板Pを露光するEUV光光源露光装置にも適用することができる。
【0089】
露光装置EXの種類としては、基板Pに半導体素子パターンを露光する半導体素子製造用の露光装置に限られず、液晶表示素子製造用又はディスプレイ製造用の露光装置や、薄膜磁気ヘッド、撮像素子(CCD)、マイクロマシン、MEMS、DNAチップ、あるいはレチクル又はマスクなどを製造するための露光装置などにも広く適用できる。
【0090】
また、上述の各実施形態では、露光光ELとしてArFエキシマレーザ光を発生する光源装置として、ArFエキシマレーザを用いてもよいが、例えば、米国特許第7023610号明細書に開示されているように、DFB半導体レーザ又はファイバーレーザなどの固体レーザ光源、ファイバーアンプなどを有する光増幅部、及び波長変換部などを含み、波長193nmのパルス光を出力する高調波発生装置を用いてもよい。さらに、上記実施形態では、前述の各照明領域と、投影領域がそれぞれ矩形状であるものとしたが、他の形状、例えば円弧状などでもよい。
【0091】
なお、上述の各実施形態においては、光透過性の基板上に所定の遮光パターン(又は位相パターン・減光パターン)を形成した光透過型マスクを用いたが、このマスクに代えて、例えば米国特許第6778257号明細書に開示されているように、露光すべきパターンの電子データに基づいて透過パターン又は反射パターン、あるいは発光パターンを形成する可変成形マスク(電子マスク、アクティブマスク、あるいはイメージジェネレータとも呼ばれる)を用いてもよい。可変成形マスクは、例えば非発光型画像表示素子(空間光変調器)の一種であるDMD(Digital Micro-mirror Device)等を含む。また、可変成形マスクとしては、DMDに限られるものでなく、DMDに代えて、以下に説明する非発光型画像表示素子を用いても良い。ここで、非発光型画像表示素子は、所定方向へ進行する光の振幅(強度)、位相あるいは偏光の状態を空間的に変調する素子であり、透過型空間光変調器としては、透過型液晶表示素子(LCD:Liquid Crystal Display)以外に、エレクトロクロミックディスプレイ(ECD)等が例として挙げられる。また、反射型空間光変調器としては、上述のDMDの他に、反射ミラーアレイ、反射型液晶表示素子、電気泳動ディスプレイ(EPD:Electro Phonetic Display)、電子ペーパー(または電子インク)、光回折型ライトバルブ(Grating Light Valve)等が例として挙げられる。
【0092】
また、非発光型画像表示素子を備える可変成形マスクに代えて、自発光型画像表示素子を含むパターン形成装置を備えるようにしても良い。この場合、照明系は不要となる。ここで自発光型画像表示素子としては、例えば、CRT(Cathode Ray Tube)、無機ELディスプレイ、有機ELディスプレイ(OLED:Organic Light Emitting Diode)、LEDディスプレイ、LDディスプレイ、電界放出ディスプレイ(FED:Field Emission Display)、プラズマディスプレイ(PDP:Plasma Display Panel)等が挙げられる。また、パターン形成装置が備える自発光型画像表示素子として、複数の発光点を有する固体光源チップ、チップを複数個アレイ状に配列した固体光源チップアレイ、または複数の発光点を1枚の基板に作り込んだタイプのもの等を用い、該固体光源チップを電気的に制御してパターンを形成しても良い。なお、固体光源素子は、無機、有機を問わない。
【0093】
上述の各実施形態においては、投影光学系PLを備えた露光装置を例に挙げて説明してきたが、投影光学系PLを用いない露光装置及び露光方法に本発明を適用することができる。このように投影光学系PLを用いない場合であっても、露光光はレンズ等の光学部材を介して基板に照射される。
【0094】
以上のように、本願実施形態の露光装置は、本願請求の範囲に挙げられた各構成要素を含む各種サブシステムを、所定の機械的精度、電気的精度、光学的精度を保つように、組み立てることで製造される。これら各種精度を確保するために、この組み立ての前後には、各種光学系については光学的精度を達成するための調整、各種機械系については機械的精度を達成するための調整、各種電気系については電気的精度を達成するための調整が行われる。各種サブシステムから露光装置への組み立て工程は、各種サブシステム相互の、機械的接続、電気回路の配線接続、気圧回路の配管接続等が含まれる。この各種サブシステムから露光装置への組み立て工程の前に、各サブシステム個々の組み立て工程があることはいうまでもない。各種サブシステムの露光装置への組み立て工程が終了したら、総合調整が行われ、露光装置全体としての各種精度が確保される。なお、露光装置の製造は温度およびクリーン度等が管理されたクリーンルームで行うことが望ましい。
【0095】
半導体デバイス等のマイクロデバイスは、図14に示すように、マイクロデバイスの機能・性能設計を行うステップ201、この設計ステップに基づいたマスク(レチクル)を製作するステップ202、デバイスの基材である基板を製造するステップ203、上述の実施形態に従って、マスクのパターンを用いて露光光で基板を露光すること、及び露光された基板を現像することを含む基板処理(露光処理)を含む基板処理ステップ204、デバイス組み立てステップ(ダイシング工程、ボンディング工程、パッケージ工程などの加工プロセスを含む)205、検査ステップ206等を経て製造される。
【0096】
なお、上述の実施形態においては、基板ステージが、基板Pに露光光ELを照射してパターンを生成する露光装置に適用される場合を例にして説明したが、本発明の基板ステージ及びその基板ステージの位置情報を計測するエンコーダシステムは、基板にパターンを形成する種々のパターン形成装置に適用可能である。そのようなパターン形成装置としては、例えばインクの滴を基板に吐出することによってその基板にパターンを形成するインクジェット装置、凹凸パターンが形成された原版と有機材料が塗布された基板とを基板のガラス転移温度以上に加熱しながら押し当て、その後、原版と基板とを離すとともに基板を冷却して基板に原版のパターンを転写するナノインプリント装置などが挙げられる。これらの装置に基板を保持する基板ステージが設けられている場合には、本発明のエンコーダシステムを適用することによって、パターンを良好に形成することができる。
【0097】
なお、上述の各実施形態の要件は、適宜組み合わせることができる。また、上述の各実施形態及び変形例で引用した露光装置などに関する全ての公開公報及び米国特許の開示を援用して本文の記載の一部とする。
【符号の説明】
【0098】
1…第1基板ステージ、2…第2基板ステージ、5…基板ステージ駆動システム、8…第1光学素子、11…ガイド面、15…第2光学素子、23…第1基板テーブル、23A…反射部材、23B…保持部材、23H…基板ホルダ、27A…上面、50…エンコーダシステム、50A…第1エンコーダユニット、50B…第2エンコーダユニット、51〜54…エンコーダ本体、61〜64…固定スケール、71…移動スケール、72…回折格子、73…光源、74…下面、75、75B…検出器、76…反射面、77…回折格子、78、78B…ビームスプリッタ、EL…露光光、EX…露光装置、P…基板、SP1…第1領域、SP2…第2領域、ST1…露光ステーション、ST2…計測ステーション
【特許請求の範囲】
【請求項1】
移動面内を移動する移動体の位置情報を計測する位置計測装置であって、
前記移動体の第1面に配置された移動格子に光を照射する光源と、
前記光源との位置関係が固定で、前記移動格子で回折された光が入射する第2面を有し、前記入射した光を回折又は反射して前記移動格子に戻す固定光学部材と、
前記移動格子を再度介して干渉された光を検出する検出装置と、を備え、
前記第1面と前記第2面とはほぼ平行である位置計測装置。
【請求項2】
前記第1面及び前記第2面は前記移動面とほぼ平行である請求項1記載の位置計測装置。
【請求項3】
前記移動格子は、前記移動面内の所定方向を周期方向とする一次元格子である請求項1又は2記載の位置計測装置。
【請求項4】
前記移動体の前記所定方向に関する位置情報を計測する請求項3記載の位置計測装置。
【請求項5】
前記固定光学部材は、前記所定方向を周期方向とする一次元格子を含む請求項3又は4記載の位置計測装置。
【請求項6】
移動格子は、前記移動体のスケール部材に配置された透過型の位相格子である請求項1〜5のいずれか一項記載の位置計測装置。
【請求項7】
前記スケール部材は平行平板である請求項6記載の位置計測装置。
【請求項8】
前記移動体は前記第1面に対して傾斜した反射面を有し、
前記光源は、前記反射面を介して、前記第1面に光を照射する請求項1〜7のいずれか一項記載の位置計測装置。
【請求項9】
前記検出装置は、前記移動格子を再度介して干渉された光を、前記反射面を介して検出する請求項8記載の位置計測装置。
【請求項10】
前記検出装置の少なくとも一部は前記移動体に配置され、
前記検出装置は、前記移動格子を再度介して干渉された光を、前記反射面を介さずに検出する請求項1〜9のいずれか一項記載の位置計測装置。
【請求項11】
前記反射面と前記第1面との間に分離光学素子を備え、
前記検出装置は、前記移動格子を再度介して干渉された光を、前記分離光学素子を介して検出する請求項10記載の位置計測装置。
【請求項12】
前記所定方向に関する前記第2面の大きさは、前記第1面の大きさより大きい請求項1〜11のいずれか一項記載の位置計測装置。
【請求項13】
前記所定方向は、前記移動面内の第1方向と、前記移動面内において前記第1方向と交差する第2方向とを含み、
前記移動格子及び前記固定光学部材は、前記第1方向と前記第2方向とに対応して複数配置されている請求項1〜12のいずれか一項記載の位置計測装置。
【請求項14】
基板にパターンを形成するパターン形成装置であって、
前記基板を保持して移動可能な移動体の位置情報を計測するために、請求項1〜13のいずれか一項記載の位置計測装置を備えたパターン形成装置。
【請求項15】
基板を露光光で露光する露光装置であって、
前記基板を保持して移動可能な移動体の位置情報を計測するために、請求項1〜13のいずれか一項記載の位置計測装置を備えた露光装置。
【請求項16】
前記移動体は、基板を保持する保持部を有し、
前記第1面は、前記保持部の周囲に配置されている請求項15記載の露光装置。
【請求項17】
前記保持部に保持された基板の表面と前記第1面とはほぼ同一平面内に配置される請求項16記載の露光装置。
【請求項18】
前記移動体を少なくとも2つ備える請求項15〜17のいずれか一項記載の露光装置。
【請求項19】
請求項15〜18のいずれか一項記載の露光装置を用いて基板を露光することと、
露光された基板を現像することと、を含むデバイス製造方法。
【請求項20】
移動面内を移動する移動体の位置情報を計測する位置計測方法であって、
前記移動体の第1面に配置された移動格子に光を照射することと、
前記光源との位置関係が固定で、入射した光を回折又は反射する、前記第1面とほぼ平行な第2面を有する固定光学部材に、前記移動格子で回折された光を入射させることと、
前記固定光学部材に入射した光を回折又は反射して、前記移動格子に戻すことと、
前記移動格子を再度介して干渉された光を検出することと、を含む位置計測方法。
【請求項21】
基板にパターンを形成するパターン形成方法であって、
前記基板を保持して移動可能な移動体の位置情報を、請求項20記載の位置計測方法を用いて計測することと、
前記移動体に保持された前記基板にパターンを形成することと、を含むパターン形成方法。
【請求項22】
基板を露光光で露光する露光方法であって、
前記基板を保持して移動可能な移動体の位置情報を、請求項20記載の位置計測方法を用いて計測することと、
前記移動体に保持された前記基板を露光することと、を含む露光方法。
【請求項23】
請求項22記載の露光方法を用いて基板を露光することと、
露光された基板を現像することと、を含むデバイス製造方法。
【請求項1】
移動面内を移動する移動体の位置情報を計測する位置計測装置であって、
前記移動体の第1面に配置された移動格子に光を照射する光源と、
前記光源との位置関係が固定で、前記移動格子で回折された光が入射する第2面を有し、前記入射した光を回折又は反射して前記移動格子に戻す固定光学部材と、
前記移動格子を再度介して干渉された光を検出する検出装置と、を備え、
前記第1面と前記第2面とはほぼ平行である位置計測装置。
【請求項2】
前記第1面及び前記第2面は前記移動面とほぼ平行である請求項1記載の位置計測装置。
【請求項3】
前記移動格子は、前記移動面内の所定方向を周期方向とする一次元格子である請求項1又は2記載の位置計測装置。
【請求項4】
前記移動体の前記所定方向に関する位置情報を計測する請求項3記載の位置計測装置。
【請求項5】
前記固定光学部材は、前記所定方向を周期方向とする一次元格子を含む請求項3又は4記載の位置計測装置。
【請求項6】
移動格子は、前記移動体のスケール部材に配置された透過型の位相格子である請求項1〜5のいずれか一項記載の位置計測装置。
【請求項7】
前記スケール部材は平行平板である請求項6記載の位置計測装置。
【請求項8】
前記移動体は前記第1面に対して傾斜した反射面を有し、
前記光源は、前記反射面を介して、前記第1面に光を照射する請求項1〜7のいずれか一項記載の位置計測装置。
【請求項9】
前記検出装置は、前記移動格子を再度介して干渉された光を、前記反射面を介して検出する請求項8記載の位置計測装置。
【請求項10】
前記検出装置の少なくとも一部は前記移動体に配置され、
前記検出装置は、前記移動格子を再度介して干渉された光を、前記反射面を介さずに検出する請求項1〜9のいずれか一項記載の位置計測装置。
【請求項11】
前記反射面と前記第1面との間に分離光学素子を備え、
前記検出装置は、前記移動格子を再度介して干渉された光を、前記分離光学素子を介して検出する請求項10記載の位置計測装置。
【請求項12】
前記所定方向に関する前記第2面の大きさは、前記第1面の大きさより大きい請求項1〜11のいずれか一項記載の位置計測装置。
【請求項13】
前記所定方向は、前記移動面内の第1方向と、前記移動面内において前記第1方向と交差する第2方向とを含み、
前記移動格子及び前記固定光学部材は、前記第1方向と前記第2方向とに対応して複数配置されている請求項1〜12のいずれか一項記載の位置計測装置。
【請求項14】
基板にパターンを形成するパターン形成装置であって、
前記基板を保持して移動可能な移動体の位置情報を計測するために、請求項1〜13のいずれか一項記載の位置計測装置を備えたパターン形成装置。
【請求項15】
基板を露光光で露光する露光装置であって、
前記基板を保持して移動可能な移動体の位置情報を計測するために、請求項1〜13のいずれか一項記載の位置計測装置を備えた露光装置。
【請求項16】
前記移動体は、基板を保持する保持部を有し、
前記第1面は、前記保持部の周囲に配置されている請求項15記載の露光装置。
【請求項17】
前記保持部に保持された基板の表面と前記第1面とはほぼ同一平面内に配置される請求項16記載の露光装置。
【請求項18】
前記移動体を少なくとも2つ備える請求項15〜17のいずれか一項記載の露光装置。
【請求項19】
請求項15〜18のいずれか一項記載の露光装置を用いて基板を露光することと、
露光された基板を現像することと、を含むデバイス製造方法。
【請求項20】
移動面内を移動する移動体の位置情報を計測する位置計測方法であって、
前記移動体の第1面に配置された移動格子に光を照射することと、
前記光源との位置関係が固定で、入射した光を回折又は反射する、前記第1面とほぼ平行な第2面を有する固定光学部材に、前記移動格子で回折された光を入射させることと、
前記固定光学部材に入射した光を回折又は反射して、前記移動格子に戻すことと、
前記移動格子を再度介して干渉された光を検出することと、を含む位置計測方法。
【請求項21】
基板にパターンを形成するパターン形成方法であって、
前記基板を保持して移動可能な移動体の位置情報を、請求項20記載の位置計測方法を用いて計測することと、
前記移動体に保持された前記基板にパターンを形成することと、を含むパターン形成方法。
【請求項22】
基板を露光光で露光する露光方法であって、
前記基板を保持して移動可能な移動体の位置情報を、請求項20記載の位置計測方法を用いて計測することと、
前記移動体に保持された前記基板を露光することと、を含む露光方法。
【請求項23】
請求項22記載の露光方法を用いて基板を露光することと、
露光された基板を現像することと、を含むデバイス製造方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【公開番号】特開2013−83655(P2013−83655A)
【公開日】平成25年5月9日(2013.5.9)
【国際特許分類】
【出願番号】特願2012−260206(P2012−260206)
【出願日】平成24年11月28日(2012.11.28)
【分割の表示】特願2008−135985(P2008−135985)の分割
【原出願日】平成20年5月23日(2008.5.23)
【出願人】(000004112)株式会社ニコン (12,601)
【Fターム(参考)】
【公開日】平成25年5月9日(2013.5.9)
【国際特許分類】
【出願日】平成24年11月28日(2012.11.28)
【分割の表示】特願2008−135985(P2008−135985)の分割
【原出願日】平成20年5月23日(2008.5.23)
【出願人】(000004112)株式会社ニコン (12,601)
【Fターム(参考)】
[ Back to top ]