
静電偏向素子及びその制御方法
【課題】複数の偏向角に自動的かつ高精度に位置決めされた状態で偏向させることが可能であり、構造や制御アルゴリズムの設計が容易な静電偏向素子を提供する。
【解決手段】静電偏向素子100は、支持基板110と、支持基板110に対して偏向し得るマイクロミラー121から構成される。支持基板110は、マイクロミラー121に対向する面に設けられた複数個の駆動電極111A〜111Mと、駆動電極111A〜111Mの上に設けられた絶縁層113を有している。マイクロミラー121は、支持基板110に対向している対向面123が円筒面で構成されている。対向面123の一部は互いに連結されない状態で支持基板110に接している。
【解決手段】静電偏向素子100は、支持基板110と、支持基板110に対して偏向し得るマイクロミラー121から構成される。支持基板110は、マイクロミラー121に対向する面に設けられた複数個の駆動電極111A〜111Mと、駆動電極111A〜111Mの上に設けられた絶縁層113を有している。マイクロミラー121は、支持基板110に対向している対向面123が円筒面で構成されている。対向面123の一部は互いに連結されない状態で支持基板110に接している。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、MEMS静電偏向素子に関する。
【背景技術】
【0002】
光ビームを複数の偏向角に自動的かつ高精度に位置決め可能なMEMS(Micro Electro Mechanicalsystem)静電偏向素子の例として、マイクロミラー制御システムが特表2009−529157号公報に開示されている。
【0003】
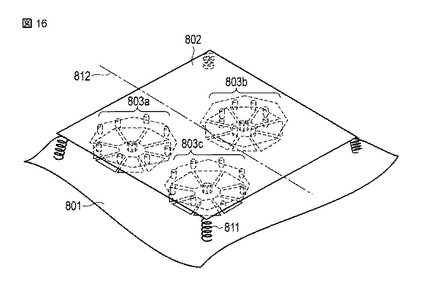
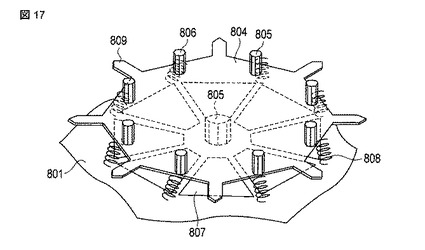
図16は、このマイクロミラー制御システムの構成例を示す透視斜視図であり、図17は、図16の一部を拡大した透視斜視図である。
【0004】
このマイクロミラー制御システムは、図16に示すように、支持基板801と、マイクロミラー802と、4個のばね811と、マルチ支持アクチュエータ803a〜803cから構成される。
【0005】
マルチ支持アクチュエータ803a〜803cは全て同一の構成であり、いずれも、図17に示すように、ステッパープレート804と、停止具805と、8個の支柱806と、8個の駆動電極807と、8個のばね808から構成される。
【0006】
マイクロミラー802は支持基板801の主面に対向して配置され、ステッパープレート804はマイクロミラー802と支持基板801の間に配置される。停止具805は支持基板801の主面に固定され、その周囲に駆動電極807が形成されている。停止具805の先端部にはステッパープレート804の中央部が互いに連結されない状態で接している。ステッパープレート804およびマイクロミラー802はさらに、外周部がばね808および811によって支持基板801にそれぞれ接続されている。ステッパープレート804には8角形の各頂点に突起809が形成され、さらにマイクロミラー802に対向する面に支柱806が形成されている。
【0007】
次にこのマイクロミラー制御システムの作用について説明する。
【0008】
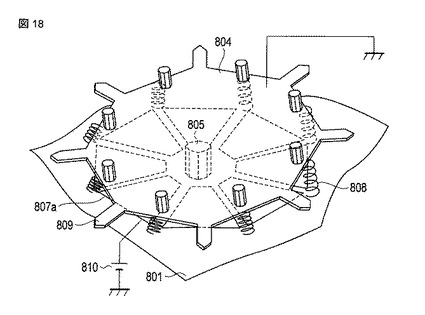
最初にマルチ支持アクチュエータ803a〜803cについて説明する。図17において、ステッパープレート804を接地した状態で、8個の駆動電極807のうちのいずれか1つに接地電位と異なる電圧を印加すると、この駆動電極とステッパープレート804の間に静電引力が発生することにより、図18に示すように、ステッパープレート804が電圧の印加された駆動電極807aに引き寄せられて偏向する。ここで、図18中の符号810は、駆動電極807aに電圧を供給するための電源を示している。
【0009】
ステッパープレート804の偏向角が増大して突起809が支持基板801に接すると、その位置でステッパープレート804は静止する。
【0010】
この状態におけるステッパープレート804の偏向方向は、突起809が支持基板801に接する位置すなわち停止具805やステッパープレート804や突起809の寸法および駆動電極807の配置によって一意的に決まるため、偏向方向は電源810の供給する電圧の大きさに依存せず自動的かつ高精度に制御される。
【0011】
駆動電極807aを接地すると、ステッパープレート804はばね808の弾性反発力によって図17の位置に復帰する。
【0012】
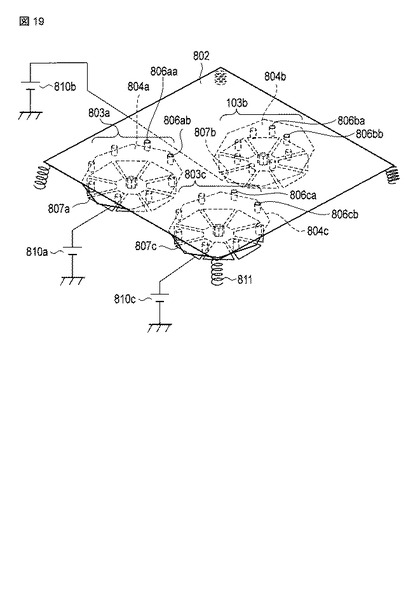
次にこのマルチ支持アクチュエータの作用に基づき、マイクロミラー制御システムの作用を説明する。まず図16においてマルチ支持アクチュエータ803a〜803cの各々を図18と同じ要領で動作させる。例えば図19に示すように駆動電極807a,807b,807cに電圧を印加して各々のステッパープレート804a,804b,804cをこれらの電極に引き寄せることで偏向させると、マイクロミラー802は各々のステッパープレートに形成されている8個の支柱のうち支持基板801から最も離れた位置にある支柱によって支持される。図19の例では支柱806aa,806ab,806ba,806bb,806ca,806cbによって支持されることになるが、支持基板801から各々の支柱先端までの距離は支柱806aa,806ab,806ca,806cbが同じであるのに対して、支柱806ba,806bbはこれらより短い(支柱806ba,806bbがステッパープレートの中央寄りに配置されていることによる)。従って異なる高さにある支柱によって支持されることにより、マイクロミラー802が偏向する。
【0013】
駆動電極807a,807b,807cを接地すると、マルチ支持アクチュエータ803a〜803cが電圧印加前の状態に復帰し、マイクロミラー802もばね811の弾性反発力によって図16の位置に復帰する。
【0014】
駆動電極807a,807b,807c以外の駆動電極に電圧を印加すると、マイクロミラー802は図19とは異なる方向に偏向する。従ってこの例ではマルチ支持アクチュエータ803a〜803cが各々8個の駆動電極を有するため、マイクロミラー802は83=512通りの方向に偏向させることができる。
【0015】
図18を使用して説明したとおり、マルチ支持アクチュエータ803a〜803cを構成する各々のステッパープレートの偏向方向は電源810a〜810cの供給する電圧の大きさに依存せず自動的かつ高精度に制御されるため、マイクロミラー802の偏向方向も同様に自動的かつ高精度に制御される。従って図16に示すマイクロミラー制御システムは駆動電圧の変動やばね808,811の特性変化等に影響されず、自動的かつ高精度な偏向動作を実現できる。
【先行技術文献】
【特許文献】
【0016】
【特許文献1】特表2009−529157号公報
【発明の概要】
【発明が解決しようとする課題】
【0017】
図16と図17に示すマイクロミラー制御システムはマルチ支持アクチュエータ803a〜803cを構成する各々のステッパープレートの偏向方向とマイクロミラー802の偏向方向の間の関係が非常に複雑なため、マイクロミラー802を所望の方向に向けるための各構成要素の寸法設計や制御アルゴリズムの設計が困難であり、またそれらの設計手法に関して開示も示唆も無い。例えばマイクロミラー802を図16に示される偏向軸812の回りに1度刻みに偏向させるような単純な動作に対しても、設計の方針すら容易には思い浮かばない。
【0018】
本発明は上記課題に鑑みなされたもので、マイクロミラーに照射した光を複数の偏向角に自動的かつ高精度に位置決めされた状態で偏向させることが可能であり、構造や制御アルゴリズムの設計が容易な静電偏向素子を提供することを目的とする。
【課題を解決するための手段】
【0019】
本発明はーつには静電偏向素子に向けられる。本発明による静電偏向素子のーつは、支持基板と、前記支持基板に対して偏向し得るマイクロミラーから構成されている。前記支持基板は、前記マイクロミラーに対向する対向面に設けられた複数個の駆動電極と、前記駆動電極の上に設けられた絶縁層を有している。前記マイクロミラーは、前記支持基板に対向している対向面の少なくとも一部が曲面または法線方向が異なる複数個の平面から構成されている。前記マイクロミラーの前記対向面の一部が前記支持基板に連結されない状態で接している。
【0020】
本発明による別の静電偏向素子は、支持基板と、前記支持基板に対して偏向し得るマイクロミラーから構成されている。前記支持基板は、前記マイクロミラーに対向する対向面に設けられた互いに同一平面上に配置された複数個の駆動電極と接地電極を有している。前記マイクロミラーは、前記支持基板に対向している対向面の少なくとも一部が曲面または法線方向が異なる複数個の平面から構成されている。前記マイクロミラーはさらに前記対向面に設けられた複数個の突起を有し、前記突起のいずれかの先端が常に前記接地電極に連結されない状態で接している。
【0021】
本発明はーつには静電偏向素子アレイに向けられる。本発明による静電偏向素子アレイは、前記静電偏向素子を同一平面内に並べて配置されることにより構成されている。
【0022】
本発明はーつには静電偏向素子の制御方法に向けられる。本発明による制御方法は、前記マイクロミラーを接地した状態で、前記駆動電極の少なくとも1個に接地電位と異なる電圧を印加することにより、前記マイクロミラーの構成要素の一部が接地電位と異なる電圧を印加された前記駆動電極の直上において前記支持基板の前記対向面に形成された構成要素のいずれかに接するまで前記マイクロミラーを偏向させる。
【発明の効果】
【0023】
本発明によれば、マイクロミラーに照射した光を複数の偏向角に自動的かつ高精度に位置決めされた状態で偏向させることが可能であり、構造や制御アルゴリズムの設計が容易な静電偏向素子が提供される。
【図面の簡単な説明】
【0024】
【図1】第1の実施の形態に係る静電偏向素子を示す斜視図である。
【図2】図1中のA−B線に沿った静電偏向素子の断面図である。
【図3】第1の実施の形態に係る静電偏向素子が駆動された状態を示している。
【図4】第1の実施の形態に係る静電偏向素子の変形例を示している。
【図5】第1の実施の形態に係る静電偏向素子の変形例を示している。
【図6】第1の実施の形態に係る静電偏向素子の変形例を示している。
【図7】第1の実施の形態に係る静電偏向素子の変形例を示している。
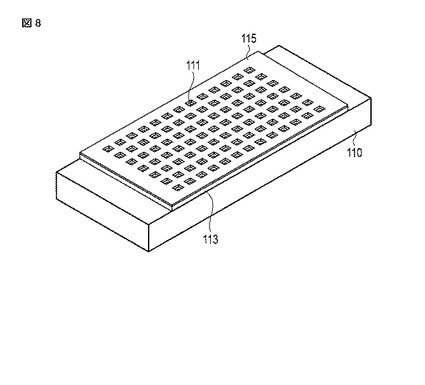
【図8】第1の実施の形態に係る駆動電極の変形例を示している。
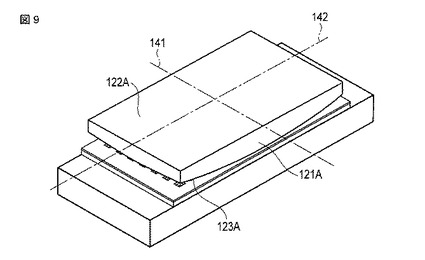
【図9】第1の実施の形態に係る静電偏向素子の変形例を示している。
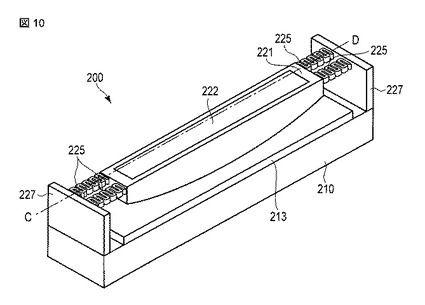
【図10】第2の実施の形態に係る静電偏向素子を示す斜視図である。
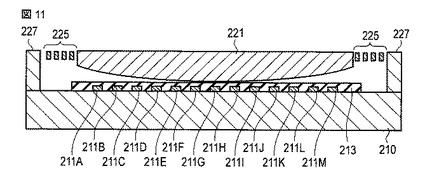
【図11】図10中のC−D線に沿った静電偏向素子の断面図である。
【図12】第2の実施の形態に係る静電偏向素子が駆動された状態を示している。
【図13】第2の実施の形態に係る静電偏向素子の変形例を示している。
【図14】第2の実施の形態に係る静電偏向素子の変形例を示している。
【図15】第3の実施の形態に係る偏向ミラーアレイ素子を示す斜視図である。
【図16】従来例に係るマイクロミラー制御システムの構成例を示す透視斜視図である。
【図17】図16のマイクロミラー制御システムに包含されたマルチ支持アクチュエータの透視斜視図である。
【図18】マルチ支持アクチュエータが駆動された状態を示している。
【図19】図16のマイクロミラー制御システムが駆動された状態を示している。
【発明を実施するための形態】
【0025】
次に、図面を参照しながら実施の形態について説明する。
【0026】
<第1の実施の形態>
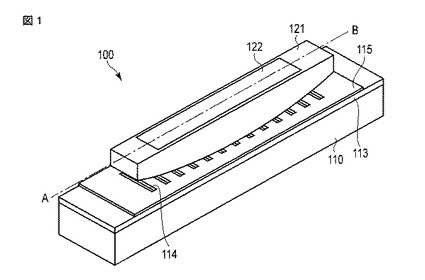
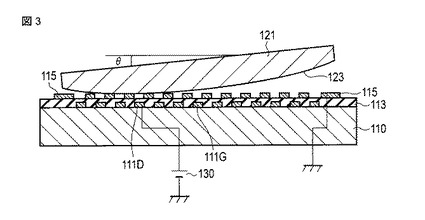
図1は、第1の実施の形態に係る静電偏向素子を示す斜視図であり、図2は、図1中のA−B線に沿った断面図である。
【0027】
図1と図2に示すように、第1の実施の形態に係る静電偏向素子100は、支持基板110と、支持基板110に対して偏向し得るマイクロミラー121から構成される。
【0028】
支持基板110は、マイクロミラー121に対向する面に設けられた複数個の駆動電極111A〜111Mと、駆動電極111A〜111Mの上に設けられた絶縁層113と、絶縁層113の上に設けられた接地電極115を有している。
【0029】
駆動電極111A〜111Mは、支持基板110の表面に一直線状に等間隔に並べて形成されている。接地電極115は、駆動電極111A〜111Mの上に絶縁層113を挟んで配置されている。接地電極115は、駆動電極111A〜111Mに対向する位置に開口部114が形成されている。駆動電極111A〜111Mや接地電極115の各々は、支持基板110の表面に形成された配線(図示せず)によって制御回路(図示せず)や電源(図示せず)等に接続される。
【0030】
マイクロミラー121は、支持基板110に対向している対向面123が円筒面で構成されている。対向面123の曲率半径は、対向面123の全体にわたって同一である。マイクロミラー121は、対向面123が13個の駆動電極111A〜111Mの全てに対向するように支持基板110上に配置され、対向面123の一部は互いに連結されない状態で支持基板110つまり接地電極115に接している。マイクロミラー121の対向面123の反対側の平面には反射面122が形成されている。
【0031】
支持基板110は、例えばガラス又は表面に絶縁膜が形成されたSiで構成され、マイクロミラー121は例えばSiで構成される。駆動電極111A〜111Mや接地電極115は、例えばAuやAl等の導電性材料で構成されるが、特に接地電極115は外部に露出しているため、Au等の化学的に安定な材料で構成することが望ましい。絶縁層113は、例えばSi酸化膜(SiO2)で構成される。
【0032】
次に、第1の実施の形態の静電偏向素子100の作用について説明する。
【0033】
まず図2において全ての駆動電極111A〜111Mと接地電極115を接地する。これにより、接地電極115に接しているマイクロミラー121も同時に接地される。
【0034】
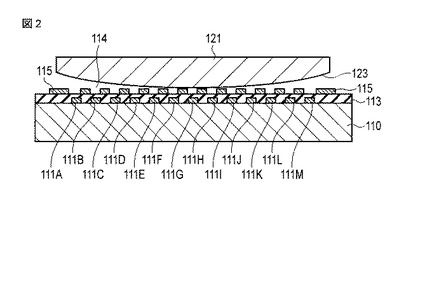
この状態で13個の駆動電極111A〜111Mのうちいずれか1つに接地電位と異なる電圧を印加する。例えば駆動電極111Dに電圧を印加すると、駆動電極111Dとマイクロミラー121が静電引力によって互いに引き合うことにより、図3に示すように対向面123が電圧の印加された駆動電極111Dの直上で接地電極115に接するようにマイクロミラー121が偏向する。ここで図3中の符号130は、駆動電極111Dに電圧を供給するための電源を示している。この状態において111D以外の駆動電極は接地されているが、図が煩雑になるため図示していない。以下、図3の状態を駆動電極111Dが駆動された状態と呼称することにする。
【0035】
駆動電極111D以外の駆動電極を駆動すると、マイクロミラー121は図3とは異なる部分が接地電極115に接することにより、図3とは異なる方向に偏向する。この例では13個の駆動電極を有するため、これらの駆動電極111A〜111Mのいずれかを駆動することにより、マイクロミラー121を13通りの方向に偏向させることができる。
【0036】
マイクロミラー121を図2の位置に復帰させる際には、中央に位置する駆動電極111Gを駆動すればよい。
【0037】
対向面123と接地電極115が互いに滑らないように両者の接触する部分における摩擦係数が十分大きく設定されていれば、上記の偏向動作の際に対向面123と接地電極115は常に同じ部分同士が接するため、図3の状態におけるマイクロミラー121の偏向方向は、対向面123の形状や駆動電極111A〜111Mの配置、非駆動状態におけるマイクロミラー121の位置等によって一意的に決まる。従ってマイクロミラー121の偏向方向は電源130の供給する電圧の大きさに依存せず自動的かつ高精度に制御される。
【0038】
また図3におけるマイクロミラー121の偏向角θは、対向面123の曲率半径をR、駆動電極111Gと駆動電極111Dの距離をXとした場合、θ=X/Rと計算され、このように所望の偏向角を得るための対向面123の形状や駆動電極の配置を容易に決定することができる。
【0039】
以上に説明したように、第1の実施の形態の静電偏向素子100においては、マイクロミラー121の偏向方向が駆動電極111A〜111Mに印加される電圧の変動等に影響されず自動的かつ高精度に制御できることに加え、マイクロミラー121を所望の方向に向けるための各構成要素の寸法設計が容易であり、さらに駆動に際して特別な制御アルゴリズムを必要としない。また、構成が単純でマイクロミラー121の偏向方向を左右する要因が少ないため、信頼性の高い安定した動作が実現できる。
【0040】
第1の実施の形態は、発明の趣旨を逸脱しない範囲内において、様々な変形が可能である。
【0041】
まず13個の矩形の駆動電極111A〜111Mが等間隔に配置された例を示したが、駆動電極の個数や形状や配置はこれに限定されず、楕円形や多角形等あらゆる形状の電極が採用可能であり、また隣接して配置される電極間の距離が場所により異なっていてもよい。また支持基板110をガラスや表面に絶縁膜が形成されたSiで構成する例を示したが、表面が絶縁された材料であれば、樹脂やセラミック、表面に絶縁膜が形成された金属等、あらゆる材料が使用できる。
【0042】
また駆動電極や接地電極をAuやAl等の材料で構成する例を示したが、導電性を有する材料であればよく、他の金属やSi、導電性樹脂、それらを積層することで構成される導電性多層膜等、あらゆる材料が使用できる。
【0043】
また絶縁層113がSi酸化膜で構成される例を示したが、絶縁性を有する材料であればよく、Si窒化膜等他の無機材料やポリイミド等の樹脂材料等、他の材料を使用してもよい。
【0044】
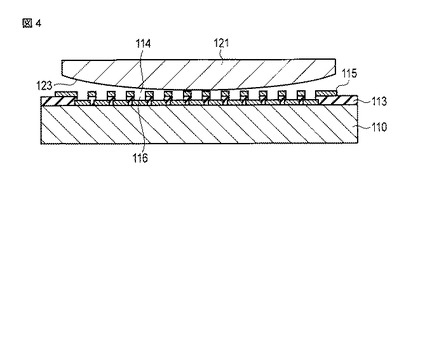
また、絶縁層113が駆動電極の表面全面に形成される例を示したが、図4に示すように、絶縁層113は、接地電極115の開口部に対応する部分に開口部116を有していてもよい。このような構成を採用することにより、絶縁物表面に蓄積される浮遊電荷による誤動作を防止することができる。この場合、駆動電極の一部が外部に露出することになるため、駆動電極においてもAu等の化学的に安定な材料を採用することが望ましい。
【0045】
またマイクロミラー121がSiで構成される例を示したが、導電性を有する材料であれば金属や導電性樹脂等、あらゆる材料が使用できる。
【0046】
またマイクロミラー121をSiで構成する場合、対向面123と接地電極115の接触抵抗を低減する目的で、対向面123の表面にAu等の導電膜を形成してもよい。この場合、マイクロミラー121と前記導電膜の界面に、必要に応じてSiの高濃度拡散層を形成してもよい。
【0047】
マイクロミラー121の反射面122は、マイクロミラー121の表面を研磨することにより反射面122として使用しても良いし、AuやAl等の金属膜や、誘電体多層膜等を反射膜として成膜して使用しても良い。
【0048】
また駆動電極111A〜111Mや接地電極115に制御回路や電源を接続して駆動する例を示したが、支持基板110として表面に絶縁膜が形成された単結晶Si基板を採用する場合、Si基板の表面や内部に形成した半導体集積回路によって構成された制御回路や電源回路を駆動電極111A〜111Mに接続してもよい。
【0049】
また1個の駆動電極だけを駆動する例を示したが、互いに接近して配置された複数個の駆動電極を同時に駆動してもよい。
【0050】
また駆動電極111A〜111Mとマイクロミラー121の間に作用する静電引力は両者の距離が離れると急激に減少するため、例えば図2に示す非駆動状態において、端の駆動電極111Aを駆動する場合、駆動電極とマイクロミラーが離れていることによりマイクロミラー121を動作させるために必要な静電力が得られない可能性がある。そのような場合は図2の状態においてマイクロミラー121に最も近い駆動電極111Gから最終的に駆動したい駆動電極111Aに向かって111F→111E→111D→111C→111B→111Aの順に駆動してもよい。
【0051】
また、マイクロミラー121が所望の方向に制御できていることを確認する等の目的で、駆動電極111A〜111Mとマイクロミラー121の間の静電容量を検出するための回路を追加してもよい。
【0052】
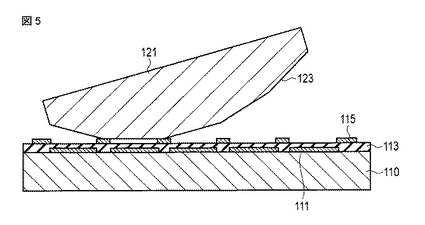
また対向面123の形状として、面の曲率半径が全体にわたって同一な円筒面を採用する例を示したが、対向面123の形状はこれに限定されず、面の曲率半径が場所により異なる曲面を採用してもよい。また、法線方向が異なる複数個の平面を組み合わせて対向面123を構成してもよい。複数個の平面を組み合わせて対向面123を構成する場合、マイクロミラー121を各々の角度に偏向させた際に、図5に示すように複数個の平面のうちのいずれかが、マイクロミラー121に対向する支持基板110の対向面に対して平行になるよう法線方向を設定することで、マイクロミラー121の偏向方向の再現性をさらに向上することができる。
【0053】
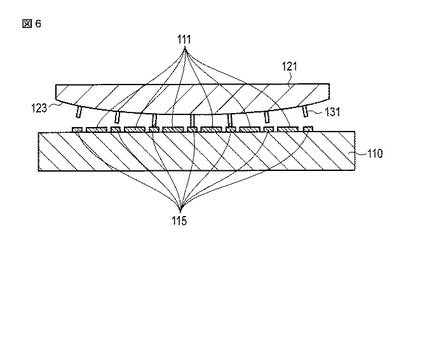
また図6に示すように、駆動電極111と接地電極115を支持基板110上の同一平面上に配置しておき、さらにマイクロミラー121の対向面123に複数個の突起131を設けて、突起131のいずれかの先端が常に接地電極115に接触するようにしてもよい。
【0054】
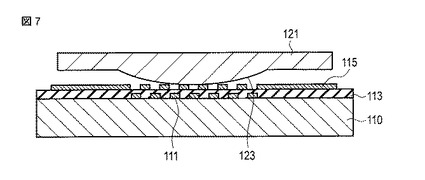
また対向面123の全体が曲面または複数個の平面から構成される例を示したが、図7に示すように、対向面123の一部が曲面または複数個の平面から構成されてもよい。また図8に示すように複数個の駆動電極111を格子状に配置して、これに図9に示すような対向面123Aが球面形状を有するマイクロミラー121Aを組み合わせてもよい。マイクロミラー121Aは、対向面123の反対側の平面全体に反射面122Aが形成されている。図1に示す静電偏向素子においてはマイクロミラーの偏向方向が1本の偏向軸回りの動作に限定されるが、図8と図9に示す構成を採用することにより、マイクロミラー121Aを互いに直交する2本の偏向軸141,142の周りに偏向させることができる。支持基板として表面に絶縁膜が形成された単結晶Si基板を採用する場合、格子状に配置された各々の駆動電極への電圧印加は、例えばDMD(Digital Micromirror Device)等で採用されているように、駆動電極下層のSi基板に形成した駆動回路構成の採用で、容易に実現できる。
【0055】
<第2の発明の実施の形態>
図10は、第2の実施の形態に係る静電偏向素子を示す斜視図であり、図11は、図10中のC−D線に沿った断面図である。
【0056】
図10と図11に示すように、第2の実施の形態に係る静電偏向素子200は、支持基板210と、支持基板210に対して偏向し得るマイクロミラー221から構成される。
【0057】
支持基板210は、マイクロミラー221に対向する面に設けられた複数個の駆動電極211A〜211Mと、駆動電極211A〜211Mの上に設けられた絶縁層213と、マイクロミラー221に接続された弾性部材の複数対のばね225と、複数対のばね225を支持する一対の支持要素227を有している。
【0058】
第2の実施形態の静電偏向素子200は、構成要素の多くは第1の実施の形態と同一だが、接地電極を含まない点と、新たな構成要素として支持要素227とばね225が追加されている点が異なっている。
【0059】
駆動電極211A〜211Mは支持基板210の表面に一直線状に等間隔に並べて形成され、駆動電極211A〜211Mは絶縁層213によって被覆されている。
【0060】
駆動電極211A〜211Mは、それぞれ、支持基板210の表面に形成された配線(図示せず)によって制御回路(図示せず)や電源(図示せず)等に接続され、マイクロミラー221は、ばね225や支持要素227を介して接地端子(図示せず)に接続される。
【0061】
マイクロミラー221は、第1の実施の形態と同様に、支持基板210に対向している対向面223が円筒面で構成されている。対向面223の曲率半径は、対向面223の全体にわたって同一である。マイクロミラー221は、対向面223が13個の駆動電極211A〜211Mの全てに対向するように支持基板210上に配置され、対向面223の一部は互いに連結されない状態で絶縁層213に接している。マイクロミラー221の対向面223の反対側の平面には反射面222が形成されている。
【0062】
一対の支持要素227は、マイクロミラー221に対向する支持基板210の対向面に固定され、駆動電極211A〜211Mが並ぶ方向に沿ってマイクロミラー221を間に挟んで配置されている。
【0063】
各ばね225はその一端が支持要素227に接続され、ばねの他端はマイクロミラー221に接続されている。
【0064】
例えば、支持要素227とばね225は単結晶Siで構成され、これら以外の構成要素については第1の実施の形態と同様の材料で構成される。
【0065】
次に、第2の実施の形態の静電偏向素子200の作用について説明する。
【0066】
まず図11において駆動電極211A〜211Mの全てと支持要素227を接地する。これにより、ばね225を介して支持要素227に接続されているマイクロミラー221も同時に接地される。
【0067】
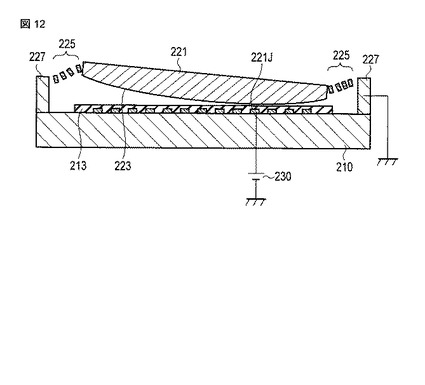
この状態で例えば駆動電極211Jに接地電位と異なる電圧を印加すると、駆動電極211Jとマイクロミラー221が静電引力によって互いに引き合うことにより、図12に示すように対向面223が駆動電極211Jの直上で絶縁層213に接するようにマイクロミラー221が偏向する。ここで図12中の符号212は、駆動電極211Jに電圧を供給するための電源を示している。この状態において211J以外の駆動電極は接地されているが、図が煩雑になるため図示していない。以下、図12の状態を駆動電極211Jが駆動された状態と呼称することにする。
【0068】
駆動電極211J以外の駆動電極を駆動すると、マイクロミラー221は図12とは異なる部分が絶縁層213に接することにより、図12とは異なる方向に偏向する。この例では13個の駆動電極を有するため、これらの駆動電極のいずれかを駆動することにより、マイクロミラー221を13通りの方向に偏向させることができる。
【0069】
マイクロミラー221を図11の位置に復帰させる際には、中央に位置する駆動電極211Gを駆動すればよい。
【0070】
ばね225は、マイクロミラー221と支持要素227を電気的に接続するだけでなく、振動等によるマイクロミラー221の位置ずれを防止する機能を有する。しかしながらばね225の弾性反発力が強すぎると、マイクロミラー221の偏向動作が妨げられ、偏向方向の再現性が損なわれる。従ってばね225は偏向動作に伴う変形に対するばね定数をなるべく小さく、支持基板210の主面に対して平行な方向への移動に伴う変形に対するばね定数をなるべく大きい値に設計することが望ましい。
【0071】
ばね225をマイクロミラー221の動作を妨げないよう適切に設計すれば、図12の状態におけるマイクロミラー221の偏向方向は、第1の実施の形態と同様に、対向面223の形状や駆動電極211A〜211Mの配置、非駆動状態におけるマイクロミラー221の位置等によって一意的に決まる。従ってマイクロミラー221の偏向方向は電源212の供給する電圧の大きさ等に依存せず自動的かつ高精度に制御される。
【0072】
以上に説明したように、第2の実施の形態の静電偏向素子200においても、第1の実施の形態の静電偏向素子100と同様に、マイクロミラーの偏向方向が駆動電極に印加される電圧の変動等に影響されず自動的かつ高精度に制御できることに加え、マイクロミラーを所望の方向に向けるための各構成要素の寸法設計が容易であり、駆動に際して特別な制御アルゴリズムを必要としない。さらにマイクロミラー221がばねによって支持されているため、振動等によるマイクロミラーの位置ずれが防止される。
【0073】
第1の実施の形態は、発明の趣旨を逸脱しない範囲内において、様々な変形が可能である。
【0074】
まずばね225に屈曲形状のばねを使用する例を示したが、ばねの形状はこれに限定されず、あらゆる形状のばねが使用可能である。
【0075】
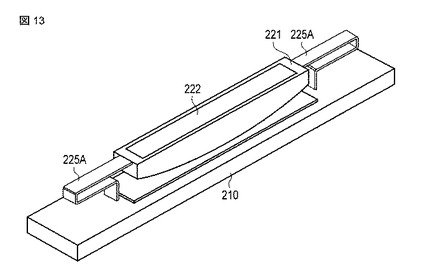
またばね225の一端を支持要素227に接続する例を示したが、ばねの形状によっては図13に示すように、支持要素227を形成せず、ばね225Aの一端を支持基板210に直接接続してもよい。言い換えれば、ばね225と支持要素227が、マイクロミラー221を支持するばね225Aに置き換えられた構成であってもよい。
【0076】
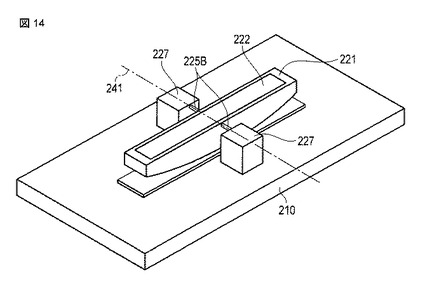
またばね225の一端がマイクロミラー221の対向する2辺に2個ずつ接続される例を示したが、ばねの配置はこれに限定されず、マイクロミラー221がばねや支持要素によって支持基板210に接続されていればよく、マイクロミラー221の任意の位置に任意の個数のばねを接続できる。例えば図14に示すように、2個のばね225Bをマイクロミラー221の偏向軸241に沿って配置してもよい。これらのばねの採用や組み合わせにより、2次元方向への傾斜にも、安定したマイクロミラーの支持が可能になる。
【0077】
またばね225を単結晶Siで構成する例を示したが、ばねの材料はこれに限定されず、導電性を有する材料であれば、多結晶SiやCu等の金属材料、導電性樹脂等、あらゆる材料が適用できる。
【0078】
また支持要素227を単結晶Siで構成する例を示したが、金属や導電性樹脂等他の導電性材料を採用してもよいし、ガラスやセラミック等の絶縁材料の表面に導電膜に導電膜が形成されたものを採用してもよい。
【0079】
また第1の実施の形態と同様に、絶縁層213の表面に、駆動電極の直上に開口部が形成された接地電極を形成してもよい。このような構成を採用することにより、絶縁物表面に蓄積される浮遊電荷による誤動作を防止することができる。
【0080】
また非駆動状態においては対向面223の一部が必ずしも絶縁層213に接している必要は無く、マイクロミラー221がばね225によって支持されることにより、対向面223が絶縁層213から離れていてもよい。この場合においても、駆動電極を駆動すると、マイクロミラー221が静電引力によって支持基板側に引き寄せられることにより、対向面223が絶縁層213に接した状態で動作する。
【0081】
また第2の実施の形態は、ばね225を除いて第1の実施の形態とほぼ同一の構成であり、第1の実施の形態で説明した様々な変形例は第2の実施の形態においても適用可能である。
【0082】
<第3の実施の形態>
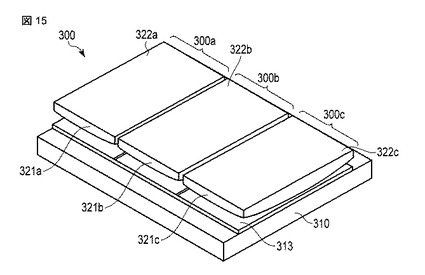
図15は、第3の実施の形態に係る偏向ミラーアレイ素子を示す斜視図である。アレイとは複数のマイクロミラーより構成される素子を意味する。
【0083】
図15に示すように、第3の実施の形態に係る偏向ミラーアレイ素子300は、例えば、3個の静電偏向素子300a,300b,300cから構成される。
【0084】
静電偏向素子300a〜300cは、互いに接近した位置に直線的に配置されている。静電偏向素子300a〜300cの構成は第1の実施の形態の変形例として説明した図9の構成とほぼ同一であり、支持基板310に対向するマイクロミラー321a,321b,321cの対向面の反対側の平面全体に反射面322a,322b,322cが形成されている。また支持基板310と絶縁層313は3個の静電偏向素子300a,300b,300cで共通のものを使用している。
【0085】
第3の実施の形態の作用は第1の実施の形態と同じであり、各々の静電偏向素子300a〜300cを構成する駆動電極は各々独立に駆動される。従って各々の静電偏向素子の反射面322a〜322cを個別に所望の方向に向けることにより、これらの反射面に向けて入射する光ビームを各々所望の方向に向けて反射させることができる。また駆動されている駆動電極の傍には常に接地されたマイクロミラーが存在するため、駆動電極から生ずる電界は静電遮蔽により外部に漏れ出しにくい。この特性により、隣接する静電偏向素子間のクロストークが防止される。
【0086】
第3の実施の形態においても、第1の実施の形態や第2の実施の形態と同様に、マイクロミラーの偏向方向が駆動電極に印加される電圧の変動等に影響されず自動的かつ高精度に制御できることに加え、マイクロミラーを所望の方向に向けるための各構成要素の寸法設計が容易であり、駆動に際して特別な制御アルゴリズムを必要としない。さらに隣接するマイクロミラーの間に構成要素が存在しないことに加え、隣接する静電偏向素子間のクロストークが発生しにくいため、WSS(Wavelength Selective Switch)等の光通信素子に要求されるような、隣接する可動反射面を接近させて配置させる素子構成を容易に実現できる。
【0087】
第3の実施の形態は、発明の趣旨を逸脱しない範囲内において、様々な変形が可能である。
【0088】
第3の実施の形態に係る偏向素子アレイは図9に示される静電偏向素子をアレイ状に配置したものであるが、静電偏向素子の構成はこれに限定されず、図1や図10に示す静電偏向素子や、それらに関連して先に説明したそれらの変形例を採用してもよい。
【0089】
また複数の静電偏向素子を一列に並べて配置する例を示したが、複数列または格子状に配置してもよい。
【0090】
また3個の静電偏向素子から構成される例を示したが、これと異なる個数の静電偏向素子で構成してもよい。
【0091】
また同一形状の静電偏向素子によってアレイを構成する例を示したが、アレイに含まれる静電偏向素子の一部について、構成要素の寸法や形状、材料等が他の静電偏向素子と異なってもよい。
【0092】
第3の実施の形態に係る偏向素子アレイは第1の実施の形態および実施の形態において説明した静電偏向素子をアレイ状に配置したものであり、第1の実施の形態および第2の実施の形態で説明した様々な変形例は第3の実施の形態においても適用可能である。
【符号の説明】
【0093】
100…静電偏向素子、110…支持基板、111,111A〜111M…駆動電極、113…絶縁層、114…開口部、115…接地電極、116…開口部、121,121A…マイクロミラー、122,122A…反射面、123,123A…対向面、130…電源、131…突起、141,142…偏向軸、200…静電偏向素子、210…支持基板、211A〜211M…駆動電極、212…電源、213…絶縁層、221…マイクロミラー、222…反射面、223…対向面、225,225A,225B…ばね、227…支持要素、241…偏向軸、300…偏向ミラーアレイ素子、300a〜300c…静電偏向素子、310…支持基板、313…絶縁層、321a〜321c…マイクロミラー、322a〜322c…反射面、801…支持基板、802…マイクロミラー、803a〜803c…マルチ支持アクチュエータ、804,804a,804b,804c…ステッパープレート、805…停止具、806,806aa,806ab,806ba,806bb,806ca,806cb…支柱、807,807a,807b,807c…駆動電極、808…ばね、809…突起、810,810a〜810c…電源、811…ばね、812…偏向軸。
【技術分野】
【0001】
本発明は、MEMS静電偏向素子に関する。
【背景技術】
【0002】
光ビームを複数の偏向角に自動的かつ高精度に位置決め可能なMEMS(Micro Electro Mechanicalsystem)静電偏向素子の例として、マイクロミラー制御システムが特表2009−529157号公報に開示されている。
【0003】
図16は、このマイクロミラー制御システムの構成例を示す透視斜視図であり、図17は、図16の一部を拡大した透視斜視図である。
【0004】
このマイクロミラー制御システムは、図16に示すように、支持基板801と、マイクロミラー802と、4個のばね811と、マルチ支持アクチュエータ803a〜803cから構成される。
【0005】
マルチ支持アクチュエータ803a〜803cは全て同一の構成であり、いずれも、図17に示すように、ステッパープレート804と、停止具805と、8個の支柱806と、8個の駆動電極807と、8個のばね808から構成される。
【0006】
マイクロミラー802は支持基板801の主面に対向して配置され、ステッパープレート804はマイクロミラー802と支持基板801の間に配置される。停止具805は支持基板801の主面に固定され、その周囲に駆動電極807が形成されている。停止具805の先端部にはステッパープレート804の中央部が互いに連結されない状態で接している。ステッパープレート804およびマイクロミラー802はさらに、外周部がばね808および811によって支持基板801にそれぞれ接続されている。ステッパープレート804には8角形の各頂点に突起809が形成され、さらにマイクロミラー802に対向する面に支柱806が形成されている。
【0007】
次にこのマイクロミラー制御システムの作用について説明する。
【0008】
最初にマルチ支持アクチュエータ803a〜803cについて説明する。図17において、ステッパープレート804を接地した状態で、8個の駆動電極807のうちのいずれか1つに接地電位と異なる電圧を印加すると、この駆動電極とステッパープレート804の間に静電引力が発生することにより、図18に示すように、ステッパープレート804が電圧の印加された駆動電極807aに引き寄せられて偏向する。ここで、図18中の符号810は、駆動電極807aに電圧を供給するための電源を示している。
【0009】
ステッパープレート804の偏向角が増大して突起809が支持基板801に接すると、その位置でステッパープレート804は静止する。
【0010】
この状態におけるステッパープレート804の偏向方向は、突起809が支持基板801に接する位置すなわち停止具805やステッパープレート804や突起809の寸法および駆動電極807の配置によって一意的に決まるため、偏向方向は電源810の供給する電圧の大きさに依存せず自動的かつ高精度に制御される。
【0011】
駆動電極807aを接地すると、ステッパープレート804はばね808の弾性反発力によって図17の位置に復帰する。
【0012】
次にこのマルチ支持アクチュエータの作用に基づき、マイクロミラー制御システムの作用を説明する。まず図16においてマルチ支持アクチュエータ803a〜803cの各々を図18と同じ要領で動作させる。例えば図19に示すように駆動電極807a,807b,807cに電圧を印加して各々のステッパープレート804a,804b,804cをこれらの電極に引き寄せることで偏向させると、マイクロミラー802は各々のステッパープレートに形成されている8個の支柱のうち支持基板801から最も離れた位置にある支柱によって支持される。図19の例では支柱806aa,806ab,806ba,806bb,806ca,806cbによって支持されることになるが、支持基板801から各々の支柱先端までの距離は支柱806aa,806ab,806ca,806cbが同じであるのに対して、支柱806ba,806bbはこれらより短い(支柱806ba,806bbがステッパープレートの中央寄りに配置されていることによる)。従って異なる高さにある支柱によって支持されることにより、マイクロミラー802が偏向する。
【0013】
駆動電極807a,807b,807cを接地すると、マルチ支持アクチュエータ803a〜803cが電圧印加前の状態に復帰し、マイクロミラー802もばね811の弾性反発力によって図16の位置に復帰する。
【0014】
駆動電極807a,807b,807c以外の駆動電極に電圧を印加すると、マイクロミラー802は図19とは異なる方向に偏向する。従ってこの例ではマルチ支持アクチュエータ803a〜803cが各々8個の駆動電極を有するため、マイクロミラー802は83=512通りの方向に偏向させることができる。
【0015】
図18を使用して説明したとおり、マルチ支持アクチュエータ803a〜803cを構成する各々のステッパープレートの偏向方向は電源810a〜810cの供給する電圧の大きさに依存せず自動的かつ高精度に制御されるため、マイクロミラー802の偏向方向も同様に自動的かつ高精度に制御される。従って図16に示すマイクロミラー制御システムは駆動電圧の変動やばね808,811の特性変化等に影響されず、自動的かつ高精度な偏向動作を実現できる。
【先行技術文献】
【特許文献】
【0016】
【特許文献1】特表2009−529157号公報
【発明の概要】
【発明が解決しようとする課題】
【0017】
図16と図17に示すマイクロミラー制御システムはマルチ支持アクチュエータ803a〜803cを構成する各々のステッパープレートの偏向方向とマイクロミラー802の偏向方向の間の関係が非常に複雑なため、マイクロミラー802を所望の方向に向けるための各構成要素の寸法設計や制御アルゴリズムの設計が困難であり、またそれらの設計手法に関して開示も示唆も無い。例えばマイクロミラー802を図16に示される偏向軸812の回りに1度刻みに偏向させるような単純な動作に対しても、設計の方針すら容易には思い浮かばない。
【0018】
本発明は上記課題に鑑みなされたもので、マイクロミラーに照射した光を複数の偏向角に自動的かつ高精度に位置決めされた状態で偏向させることが可能であり、構造や制御アルゴリズムの設計が容易な静電偏向素子を提供することを目的とする。
【課題を解決するための手段】
【0019】
本発明はーつには静電偏向素子に向けられる。本発明による静電偏向素子のーつは、支持基板と、前記支持基板に対して偏向し得るマイクロミラーから構成されている。前記支持基板は、前記マイクロミラーに対向する対向面に設けられた複数個の駆動電極と、前記駆動電極の上に設けられた絶縁層を有している。前記マイクロミラーは、前記支持基板に対向している対向面の少なくとも一部が曲面または法線方向が異なる複数個の平面から構成されている。前記マイクロミラーの前記対向面の一部が前記支持基板に連結されない状態で接している。
【0020】
本発明による別の静電偏向素子は、支持基板と、前記支持基板に対して偏向し得るマイクロミラーから構成されている。前記支持基板は、前記マイクロミラーに対向する対向面に設けられた互いに同一平面上に配置された複数個の駆動電極と接地電極を有している。前記マイクロミラーは、前記支持基板に対向している対向面の少なくとも一部が曲面または法線方向が異なる複数個の平面から構成されている。前記マイクロミラーはさらに前記対向面に設けられた複数個の突起を有し、前記突起のいずれかの先端が常に前記接地電極に連結されない状態で接している。
【0021】
本発明はーつには静電偏向素子アレイに向けられる。本発明による静電偏向素子アレイは、前記静電偏向素子を同一平面内に並べて配置されることにより構成されている。
【0022】
本発明はーつには静電偏向素子の制御方法に向けられる。本発明による制御方法は、前記マイクロミラーを接地した状態で、前記駆動電極の少なくとも1個に接地電位と異なる電圧を印加することにより、前記マイクロミラーの構成要素の一部が接地電位と異なる電圧を印加された前記駆動電極の直上において前記支持基板の前記対向面に形成された構成要素のいずれかに接するまで前記マイクロミラーを偏向させる。
【発明の効果】
【0023】
本発明によれば、マイクロミラーに照射した光を複数の偏向角に自動的かつ高精度に位置決めされた状態で偏向させることが可能であり、構造や制御アルゴリズムの設計が容易な静電偏向素子が提供される。
【図面の簡単な説明】
【0024】
【図1】第1の実施の形態に係る静電偏向素子を示す斜視図である。
【図2】図1中のA−B線に沿った静電偏向素子の断面図である。
【図3】第1の実施の形態に係る静電偏向素子が駆動された状態を示している。
【図4】第1の実施の形態に係る静電偏向素子の変形例を示している。
【図5】第1の実施の形態に係る静電偏向素子の変形例を示している。
【図6】第1の実施の形態に係る静電偏向素子の変形例を示している。
【図7】第1の実施の形態に係る静電偏向素子の変形例を示している。
【図8】第1の実施の形態に係る駆動電極の変形例を示している。
【図9】第1の実施の形態に係る静電偏向素子の変形例を示している。
【図10】第2の実施の形態に係る静電偏向素子を示す斜視図である。
【図11】図10中のC−D線に沿った静電偏向素子の断面図である。
【図12】第2の実施の形態に係る静電偏向素子が駆動された状態を示している。
【図13】第2の実施の形態に係る静電偏向素子の変形例を示している。
【図14】第2の実施の形態に係る静電偏向素子の変形例を示している。
【図15】第3の実施の形態に係る偏向ミラーアレイ素子を示す斜視図である。
【図16】従来例に係るマイクロミラー制御システムの構成例を示す透視斜視図である。
【図17】図16のマイクロミラー制御システムに包含されたマルチ支持アクチュエータの透視斜視図である。
【図18】マルチ支持アクチュエータが駆動された状態を示している。
【図19】図16のマイクロミラー制御システムが駆動された状態を示している。
【発明を実施するための形態】
【0025】
次に、図面を参照しながら実施の形態について説明する。
【0026】
<第1の実施の形態>
図1は、第1の実施の形態に係る静電偏向素子を示す斜視図であり、図2は、図1中のA−B線に沿った断面図である。
【0027】
図1と図2に示すように、第1の実施の形態に係る静電偏向素子100は、支持基板110と、支持基板110に対して偏向し得るマイクロミラー121から構成される。
【0028】
支持基板110は、マイクロミラー121に対向する面に設けられた複数個の駆動電極111A〜111Mと、駆動電極111A〜111Mの上に設けられた絶縁層113と、絶縁層113の上に設けられた接地電極115を有している。
【0029】
駆動電極111A〜111Mは、支持基板110の表面に一直線状に等間隔に並べて形成されている。接地電極115は、駆動電極111A〜111Mの上に絶縁層113を挟んで配置されている。接地電極115は、駆動電極111A〜111Mに対向する位置に開口部114が形成されている。駆動電極111A〜111Mや接地電極115の各々は、支持基板110の表面に形成された配線(図示せず)によって制御回路(図示せず)や電源(図示せず)等に接続される。
【0030】
マイクロミラー121は、支持基板110に対向している対向面123が円筒面で構成されている。対向面123の曲率半径は、対向面123の全体にわたって同一である。マイクロミラー121は、対向面123が13個の駆動電極111A〜111Mの全てに対向するように支持基板110上に配置され、対向面123の一部は互いに連結されない状態で支持基板110つまり接地電極115に接している。マイクロミラー121の対向面123の反対側の平面には反射面122が形成されている。
【0031】
支持基板110は、例えばガラス又は表面に絶縁膜が形成されたSiで構成され、マイクロミラー121は例えばSiで構成される。駆動電極111A〜111Mや接地電極115は、例えばAuやAl等の導電性材料で構成されるが、特に接地電極115は外部に露出しているため、Au等の化学的に安定な材料で構成することが望ましい。絶縁層113は、例えばSi酸化膜(SiO2)で構成される。
【0032】
次に、第1の実施の形態の静電偏向素子100の作用について説明する。
【0033】
まず図2において全ての駆動電極111A〜111Mと接地電極115を接地する。これにより、接地電極115に接しているマイクロミラー121も同時に接地される。
【0034】
この状態で13個の駆動電極111A〜111Mのうちいずれか1つに接地電位と異なる電圧を印加する。例えば駆動電極111Dに電圧を印加すると、駆動電極111Dとマイクロミラー121が静電引力によって互いに引き合うことにより、図3に示すように対向面123が電圧の印加された駆動電極111Dの直上で接地電極115に接するようにマイクロミラー121が偏向する。ここで図3中の符号130は、駆動電極111Dに電圧を供給するための電源を示している。この状態において111D以外の駆動電極は接地されているが、図が煩雑になるため図示していない。以下、図3の状態を駆動電極111Dが駆動された状態と呼称することにする。
【0035】
駆動電極111D以外の駆動電極を駆動すると、マイクロミラー121は図3とは異なる部分が接地電極115に接することにより、図3とは異なる方向に偏向する。この例では13個の駆動電極を有するため、これらの駆動電極111A〜111Mのいずれかを駆動することにより、マイクロミラー121を13通りの方向に偏向させることができる。
【0036】
マイクロミラー121を図2の位置に復帰させる際には、中央に位置する駆動電極111Gを駆動すればよい。
【0037】
対向面123と接地電極115が互いに滑らないように両者の接触する部分における摩擦係数が十分大きく設定されていれば、上記の偏向動作の際に対向面123と接地電極115は常に同じ部分同士が接するため、図3の状態におけるマイクロミラー121の偏向方向は、対向面123の形状や駆動電極111A〜111Mの配置、非駆動状態におけるマイクロミラー121の位置等によって一意的に決まる。従ってマイクロミラー121の偏向方向は電源130の供給する電圧の大きさに依存せず自動的かつ高精度に制御される。
【0038】
また図3におけるマイクロミラー121の偏向角θは、対向面123の曲率半径をR、駆動電極111Gと駆動電極111Dの距離をXとした場合、θ=X/Rと計算され、このように所望の偏向角を得るための対向面123の形状や駆動電極の配置を容易に決定することができる。
【0039】
以上に説明したように、第1の実施の形態の静電偏向素子100においては、マイクロミラー121の偏向方向が駆動電極111A〜111Mに印加される電圧の変動等に影響されず自動的かつ高精度に制御できることに加え、マイクロミラー121を所望の方向に向けるための各構成要素の寸法設計が容易であり、さらに駆動に際して特別な制御アルゴリズムを必要としない。また、構成が単純でマイクロミラー121の偏向方向を左右する要因が少ないため、信頼性の高い安定した動作が実現できる。
【0040】
第1の実施の形態は、発明の趣旨を逸脱しない範囲内において、様々な変形が可能である。
【0041】
まず13個の矩形の駆動電極111A〜111Mが等間隔に配置された例を示したが、駆動電極の個数や形状や配置はこれに限定されず、楕円形や多角形等あらゆる形状の電極が採用可能であり、また隣接して配置される電極間の距離が場所により異なっていてもよい。また支持基板110をガラスや表面に絶縁膜が形成されたSiで構成する例を示したが、表面が絶縁された材料であれば、樹脂やセラミック、表面に絶縁膜が形成された金属等、あらゆる材料が使用できる。
【0042】
また駆動電極や接地電極をAuやAl等の材料で構成する例を示したが、導電性を有する材料であればよく、他の金属やSi、導電性樹脂、それらを積層することで構成される導電性多層膜等、あらゆる材料が使用できる。
【0043】
また絶縁層113がSi酸化膜で構成される例を示したが、絶縁性を有する材料であればよく、Si窒化膜等他の無機材料やポリイミド等の樹脂材料等、他の材料を使用してもよい。
【0044】
また、絶縁層113が駆動電極の表面全面に形成される例を示したが、図4に示すように、絶縁層113は、接地電極115の開口部に対応する部分に開口部116を有していてもよい。このような構成を採用することにより、絶縁物表面に蓄積される浮遊電荷による誤動作を防止することができる。この場合、駆動電極の一部が外部に露出することになるため、駆動電極においてもAu等の化学的に安定な材料を採用することが望ましい。
【0045】
またマイクロミラー121がSiで構成される例を示したが、導電性を有する材料であれば金属や導電性樹脂等、あらゆる材料が使用できる。
【0046】
またマイクロミラー121をSiで構成する場合、対向面123と接地電極115の接触抵抗を低減する目的で、対向面123の表面にAu等の導電膜を形成してもよい。この場合、マイクロミラー121と前記導電膜の界面に、必要に応じてSiの高濃度拡散層を形成してもよい。
【0047】
マイクロミラー121の反射面122は、マイクロミラー121の表面を研磨することにより反射面122として使用しても良いし、AuやAl等の金属膜や、誘電体多層膜等を反射膜として成膜して使用しても良い。
【0048】
また駆動電極111A〜111Mや接地電極115に制御回路や電源を接続して駆動する例を示したが、支持基板110として表面に絶縁膜が形成された単結晶Si基板を採用する場合、Si基板の表面や内部に形成した半導体集積回路によって構成された制御回路や電源回路を駆動電極111A〜111Mに接続してもよい。
【0049】
また1個の駆動電極だけを駆動する例を示したが、互いに接近して配置された複数個の駆動電極を同時に駆動してもよい。
【0050】
また駆動電極111A〜111Mとマイクロミラー121の間に作用する静電引力は両者の距離が離れると急激に減少するため、例えば図2に示す非駆動状態において、端の駆動電極111Aを駆動する場合、駆動電極とマイクロミラーが離れていることによりマイクロミラー121を動作させるために必要な静電力が得られない可能性がある。そのような場合は図2の状態においてマイクロミラー121に最も近い駆動電極111Gから最終的に駆動したい駆動電極111Aに向かって111F→111E→111D→111C→111B→111Aの順に駆動してもよい。
【0051】
また、マイクロミラー121が所望の方向に制御できていることを確認する等の目的で、駆動電極111A〜111Mとマイクロミラー121の間の静電容量を検出するための回路を追加してもよい。
【0052】
また対向面123の形状として、面の曲率半径が全体にわたって同一な円筒面を採用する例を示したが、対向面123の形状はこれに限定されず、面の曲率半径が場所により異なる曲面を採用してもよい。また、法線方向が異なる複数個の平面を組み合わせて対向面123を構成してもよい。複数個の平面を組み合わせて対向面123を構成する場合、マイクロミラー121を各々の角度に偏向させた際に、図5に示すように複数個の平面のうちのいずれかが、マイクロミラー121に対向する支持基板110の対向面に対して平行になるよう法線方向を設定することで、マイクロミラー121の偏向方向の再現性をさらに向上することができる。
【0053】
また図6に示すように、駆動電極111と接地電極115を支持基板110上の同一平面上に配置しておき、さらにマイクロミラー121の対向面123に複数個の突起131を設けて、突起131のいずれかの先端が常に接地電極115に接触するようにしてもよい。
【0054】
また対向面123の全体が曲面または複数個の平面から構成される例を示したが、図7に示すように、対向面123の一部が曲面または複数個の平面から構成されてもよい。また図8に示すように複数個の駆動電極111を格子状に配置して、これに図9に示すような対向面123Aが球面形状を有するマイクロミラー121Aを組み合わせてもよい。マイクロミラー121Aは、対向面123の反対側の平面全体に反射面122Aが形成されている。図1に示す静電偏向素子においてはマイクロミラーの偏向方向が1本の偏向軸回りの動作に限定されるが、図8と図9に示す構成を採用することにより、マイクロミラー121Aを互いに直交する2本の偏向軸141,142の周りに偏向させることができる。支持基板として表面に絶縁膜が形成された単結晶Si基板を採用する場合、格子状に配置された各々の駆動電極への電圧印加は、例えばDMD(Digital Micromirror Device)等で採用されているように、駆動電極下層のSi基板に形成した駆動回路構成の採用で、容易に実現できる。
【0055】
<第2の発明の実施の形態>
図10は、第2の実施の形態に係る静電偏向素子を示す斜視図であり、図11は、図10中のC−D線に沿った断面図である。
【0056】
図10と図11に示すように、第2の実施の形態に係る静電偏向素子200は、支持基板210と、支持基板210に対して偏向し得るマイクロミラー221から構成される。
【0057】
支持基板210は、マイクロミラー221に対向する面に設けられた複数個の駆動電極211A〜211Mと、駆動電極211A〜211Mの上に設けられた絶縁層213と、マイクロミラー221に接続された弾性部材の複数対のばね225と、複数対のばね225を支持する一対の支持要素227を有している。
【0058】
第2の実施形態の静電偏向素子200は、構成要素の多くは第1の実施の形態と同一だが、接地電極を含まない点と、新たな構成要素として支持要素227とばね225が追加されている点が異なっている。
【0059】
駆動電極211A〜211Mは支持基板210の表面に一直線状に等間隔に並べて形成され、駆動電極211A〜211Mは絶縁層213によって被覆されている。
【0060】
駆動電極211A〜211Mは、それぞれ、支持基板210の表面に形成された配線(図示せず)によって制御回路(図示せず)や電源(図示せず)等に接続され、マイクロミラー221は、ばね225や支持要素227を介して接地端子(図示せず)に接続される。
【0061】
マイクロミラー221は、第1の実施の形態と同様に、支持基板210に対向している対向面223が円筒面で構成されている。対向面223の曲率半径は、対向面223の全体にわたって同一である。マイクロミラー221は、対向面223が13個の駆動電極211A〜211Mの全てに対向するように支持基板210上に配置され、対向面223の一部は互いに連結されない状態で絶縁層213に接している。マイクロミラー221の対向面223の反対側の平面には反射面222が形成されている。
【0062】
一対の支持要素227は、マイクロミラー221に対向する支持基板210の対向面に固定され、駆動電極211A〜211Mが並ぶ方向に沿ってマイクロミラー221を間に挟んで配置されている。
【0063】
各ばね225はその一端が支持要素227に接続され、ばねの他端はマイクロミラー221に接続されている。
【0064】
例えば、支持要素227とばね225は単結晶Siで構成され、これら以外の構成要素については第1の実施の形態と同様の材料で構成される。
【0065】
次に、第2の実施の形態の静電偏向素子200の作用について説明する。
【0066】
まず図11において駆動電極211A〜211Mの全てと支持要素227を接地する。これにより、ばね225を介して支持要素227に接続されているマイクロミラー221も同時に接地される。
【0067】
この状態で例えば駆動電極211Jに接地電位と異なる電圧を印加すると、駆動電極211Jとマイクロミラー221が静電引力によって互いに引き合うことにより、図12に示すように対向面223が駆動電極211Jの直上で絶縁層213に接するようにマイクロミラー221が偏向する。ここで図12中の符号212は、駆動電極211Jに電圧を供給するための電源を示している。この状態において211J以外の駆動電極は接地されているが、図が煩雑になるため図示していない。以下、図12の状態を駆動電極211Jが駆動された状態と呼称することにする。
【0068】
駆動電極211J以外の駆動電極を駆動すると、マイクロミラー221は図12とは異なる部分が絶縁層213に接することにより、図12とは異なる方向に偏向する。この例では13個の駆動電極を有するため、これらの駆動電極のいずれかを駆動することにより、マイクロミラー221を13通りの方向に偏向させることができる。
【0069】
マイクロミラー221を図11の位置に復帰させる際には、中央に位置する駆動電極211Gを駆動すればよい。
【0070】
ばね225は、マイクロミラー221と支持要素227を電気的に接続するだけでなく、振動等によるマイクロミラー221の位置ずれを防止する機能を有する。しかしながらばね225の弾性反発力が強すぎると、マイクロミラー221の偏向動作が妨げられ、偏向方向の再現性が損なわれる。従ってばね225は偏向動作に伴う変形に対するばね定数をなるべく小さく、支持基板210の主面に対して平行な方向への移動に伴う変形に対するばね定数をなるべく大きい値に設計することが望ましい。
【0071】
ばね225をマイクロミラー221の動作を妨げないよう適切に設計すれば、図12の状態におけるマイクロミラー221の偏向方向は、第1の実施の形態と同様に、対向面223の形状や駆動電極211A〜211Mの配置、非駆動状態におけるマイクロミラー221の位置等によって一意的に決まる。従ってマイクロミラー221の偏向方向は電源212の供給する電圧の大きさ等に依存せず自動的かつ高精度に制御される。
【0072】
以上に説明したように、第2の実施の形態の静電偏向素子200においても、第1の実施の形態の静電偏向素子100と同様に、マイクロミラーの偏向方向が駆動電極に印加される電圧の変動等に影響されず自動的かつ高精度に制御できることに加え、マイクロミラーを所望の方向に向けるための各構成要素の寸法設計が容易であり、駆動に際して特別な制御アルゴリズムを必要としない。さらにマイクロミラー221がばねによって支持されているため、振動等によるマイクロミラーの位置ずれが防止される。
【0073】
第1の実施の形態は、発明の趣旨を逸脱しない範囲内において、様々な変形が可能である。
【0074】
まずばね225に屈曲形状のばねを使用する例を示したが、ばねの形状はこれに限定されず、あらゆる形状のばねが使用可能である。
【0075】
またばね225の一端を支持要素227に接続する例を示したが、ばねの形状によっては図13に示すように、支持要素227を形成せず、ばね225Aの一端を支持基板210に直接接続してもよい。言い換えれば、ばね225と支持要素227が、マイクロミラー221を支持するばね225Aに置き換えられた構成であってもよい。
【0076】
またばね225の一端がマイクロミラー221の対向する2辺に2個ずつ接続される例を示したが、ばねの配置はこれに限定されず、マイクロミラー221がばねや支持要素によって支持基板210に接続されていればよく、マイクロミラー221の任意の位置に任意の個数のばねを接続できる。例えば図14に示すように、2個のばね225Bをマイクロミラー221の偏向軸241に沿って配置してもよい。これらのばねの採用や組み合わせにより、2次元方向への傾斜にも、安定したマイクロミラーの支持が可能になる。
【0077】
またばね225を単結晶Siで構成する例を示したが、ばねの材料はこれに限定されず、導電性を有する材料であれば、多結晶SiやCu等の金属材料、導電性樹脂等、あらゆる材料が適用できる。
【0078】
また支持要素227を単結晶Siで構成する例を示したが、金属や導電性樹脂等他の導電性材料を採用してもよいし、ガラスやセラミック等の絶縁材料の表面に導電膜に導電膜が形成されたものを採用してもよい。
【0079】
また第1の実施の形態と同様に、絶縁層213の表面に、駆動電極の直上に開口部が形成された接地電極を形成してもよい。このような構成を採用することにより、絶縁物表面に蓄積される浮遊電荷による誤動作を防止することができる。
【0080】
また非駆動状態においては対向面223の一部が必ずしも絶縁層213に接している必要は無く、マイクロミラー221がばね225によって支持されることにより、対向面223が絶縁層213から離れていてもよい。この場合においても、駆動電極を駆動すると、マイクロミラー221が静電引力によって支持基板側に引き寄せられることにより、対向面223が絶縁層213に接した状態で動作する。
【0081】
また第2の実施の形態は、ばね225を除いて第1の実施の形態とほぼ同一の構成であり、第1の実施の形態で説明した様々な変形例は第2の実施の形態においても適用可能である。
【0082】
<第3の実施の形態>
図15は、第3の実施の形態に係る偏向ミラーアレイ素子を示す斜視図である。アレイとは複数のマイクロミラーより構成される素子を意味する。
【0083】
図15に示すように、第3の実施の形態に係る偏向ミラーアレイ素子300は、例えば、3個の静電偏向素子300a,300b,300cから構成される。
【0084】
静電偏向素子300a〜300cは、互いに接近した位置に直線的に配置されている。静電偏向素子300a〜300cの構成は第1の実施の形態の変形例として説明した図9の構成とほぼ同一であり、支持基板310に対向するマイクロミラー321a,321b,321cの対向面の反対側の平面全体に反射面322a,322b,322cが形成されている。また支持基板310と絶縁層313は3個の静電偏向素子300a,300b,300cで共通のものを使用している。
【0085】
第3の実施の形態の作用は第1の実施の形態と同じであり、各々の静電偏向素子300a〜300cを構成する駆動電極は各々独立に駆動される。従って各々の静電偏向素子の反射面322a〜322cを個別に所望の方向に向けることにより、これらの反射面に向けて入射する光ビームを各々所望の方向に向けて反射させることができる。また駆動されている駆動電極の傍には常に接地されたマイクロミラーが存在するため、駆動電極から生ずる電界は静電遮蔽により外部に漏れ出しにくい。この特性により、隣接する静電偏向素子間のクロストークが防止される。
【0086】
第3の実施の形態においても、第1の実施の形態や第2の実施の形態と同様に、マイクロミラーの偏向方向が駆動電極に印加される電圧の変動等に影響されず自動的かつ高精度に制御できることに加え、マイクロミラーを所望の方向に向けるための各構成要素の寸法設計が容易であり、駆動に際して特別な制御アルゴリズムを必要としない。さらに隣接するマイクロミラーの間に構成要素が存在しないことに加え、隣接する静電偏向素子間のクロストークが発生しにくいため、WSS(Wavelength Selective Switch)等の光通信素子に要求されるような、隣接する可動反射面を接近させて配置させる素子構成を容易に実現できる。
【0087】
第3の実施の形態は、発明の趣旨を逸脱しない範囲内において、様々な変形が可能である。
【0088】
第3の実施の形態に係る偏向素子アレイは図9に示される静電偏向素子をアレイ状に配置したものであるが、静電偏向素子の構成はこれに限定されず、図1や図10に示す静電偏向素子や、それらに関連して先に説明したそれらの変形例を採用してもよい。
【0089】
また複数の静電偏向素子を一列に並べて配置する例を示したが、複数列または格子状に配置してもよい。
【0090】
また3個の静電偏向素子から構成される例を示したが、これと異なる個数の静電偏向素子で構成してもよい。
【0091】
また同一形状の静電偏向素子によってアレイを構成する例を示したが、アレイに含まれる静電偏向素子の一部について、構成要素の寸法や形状、材料等が他の静電偏向素子と異なってもよい。
【0092】
第3の実施の形態に係る偏向素子アレイは第1の実施の形態および実施の形態において説明した静電偏向素子をアレイ状に配置したものであり、第1の実施の形態および第2の実施の形態で説明した様々な変形例は第3の実施の形態においても適用可能である。
【符号の説明】
【0093】
100…静電偏向素子、110…支持基板、111,111A〜111M…駆動電極、113…絶縁層、114…開口部、115…接地電極、116…開口部、121,121A…マイクロミラー、122,122A…反射面、123,123A…対向面、130…電源、131…突起、141,142…偏向軸、200…静電偏向素子、210…支持基板、211A〜211M…駆動電極、212…電源、213…絶縁層、221…マイクロミラー、222…反射面、223…対向面、225,225A,225B…ばね、227…支持要素、241…偏向軸、300…偏向ミラーアレイ素子、300a〜300c…静電偏向素子、310…支持基板、313…絶縁層、321a〜321c…マイクロミラー、322a〜322c…反射面、801…支持基板、802…マイクロミラー、803a〜803c…マルチ支持アクチュエータ、804,804a,804b,804c…ステッパープレート、805…停止具、806,806aa,806ab,806ba,806bb,806ca,806cb…支柱、807,807a,807b,807c…駆動電極、808…ばね、809…突起、810,810a〜810c…電源、811…ばね、812…偏向軸。
【特許請求の範囲】
【請求項1】
支持基板と、
前記支持基板に対して偏向し得るマイクロミラーを備え、
前記支持基板は、前記マイクロミラーに対向する対向面に設けられた複数個の駆動電極と、前記駆動電極の上に設けられた絶縁層を有し、
前記マイクロミラーは、前記支持基板に対向している対向面の少なくとも一部が曲面または法線方向が異なる複数個の平面から構成されており、
前記マイクロミラーの前記対向面の一部が前記支持基板に連結されない状態で接している、静電偏向素子。
【請求項2】
前記支持基板は、前記絶縁層の上に設けられた接地電極をさらに有し、前記接地電極は、前記駆動電極に対向する位置に開口部が形成されていることを特徴とする、請求項1に記載の静電偏向素子。
【請求項3】
前記絶縁層は、前記接地電極の開口部に対応する部分に開口部を有していることを特徴とする、請求項2に記載の静電偏向素子。
【請求項4】
支持基板と、
前記支持基板に対して偏向し得るマイクロミラーから構成され、
前記支持基板は、前記マイクロミラーに対向する対向面に設けられた互いに同一平面上に配置された複数個の駆動電極と接地電極を有し、
前記マイクロミラーは、前記支持基板に対向している対向面の少なくとも一部が曲面または法線方向が異なる複数個の平面から構成され、
前記マイクロミラーはさらに前記対向面に設けられた複数個の突起を有し、前記突起のいずれかの先端が常に前記接地電極に連結されない状態で接している、静電偏向素子。
【請求項5】
前記支持基板は、前記マイクロミラーを支持する弾性部材をさらに有していることを特徴とする、請求項1〜4のいずれか一つに記載の静電偏向素子。
【請求項6】
前記支持基板は、前記マイクロミラーに接続された弾性部材と、前記弾性部材を支持する支持要素をさらに有していることを特徴とする、請求項1〜4のいずれかに記載の静電偏向素子。
【請求項7】
前記駆動電極が、1列または複数列に並べて配置されていることを特徴とする、請求項1〜6のいずれか一つに記載の静電偏向素子。
【請求項8】
前記駆動電極が格子状に配置されていることを特徴とする、請求項1〜6のいずれか一つに記載の静電偏向素子。
【請求項9】
前記曲面が円筒面であることを特徴とする、請求項1〜8のいずれか一つに記載の静電偏向素子。
【請求項10】
前記曲面が球面であることを特徴とする、請求項1〜8のいずれか一つに記載の静電偏向素子。
【請求項11】
前記マイクロミラーは、前記マイクロミラーの前記対向面の反対側の面に反射面が形成されていることを特徴とする、請求項1〜10のいずれかに記載の静電偏向素子。
【請求項12】
請求項1〜11に記載の静電偏向素子を同一平面内に並べて配置することにより構成される、静電偏向素子アレイ。
【請求項13】
前記マイクロミラーを接地した状態で、前記駆動電極の少なくとも1個に接地電位と異なる電圧を印加することにより、前記マイクロミラーの構成要素の一部が接地電位と異なる電圧を印加された前記駆動電極の直上において前記支持基板の前記対向面に形成された構成要素のいずれかに接するまで前記マイクロミラーを偏向させることを特徴とする、請求項1〜11のいずれか一つに記載の静電偏向素子の制御方法。
【請求項14】
接地電位と異なる電圧を印加された前記駆動電極の周囲に配置された駆動電極に、接地電位と異なる電圧をさらに印加することを特徴とする、請求項13に記載の静電偏向素子の制御方法。
【請求項1】
支持基板と、
前記支持基板に対して偏向し得るマイクロミラーを備え、
前記支持基板は、前記マイクロミラーに対向する対向面に設けられた複数個の駆動電極と、前記駆動電極の上に設けられた絶縁層を有し、
前記マイクロミラーは、前記支持基板に対向している対向面の少なくとも一部が曲面または法線方向が異なる複数個の平面から構成されており、
前記マイクロミラーの前記対向面の一部が前記支持基板に連結されない状態で接している、静電偏向素子。
【請求項2】
前記支持基板は、前記絶縁層の上に設けられた接地電極をさらに有し、前記接地電極は、前記駆動電極に対向する位置に開口部が形成されていることを特徴とする、請求項1に記載の静電偏向素子。
【請求項3】
前記絶縁層は、前記接地電極の開口部に対応する部分に開口部を有していることを特徴とする、請求項2に記載の静電偏向素子。
【請求項4】
支持基板と、
前記支持基板に対して偏向し得るマイクロミラーから構成され、
前記支持基板は、前記マイクロミラーに対向する対向面に設けられた互いに同一平面上に配置された複数個の駆動電極と接地電極を有し、
前記マイクロミラーは、前記支持基板に対向している対向面の少なくとも一部が曲面または法線方向が異なる複数個の平面から構成され、
前記マイクロミラーはさらに前記対向面に設けられた複数個の突起を有し、前記突起のいずれかの先端が常に前記接地電極に連結されない状態で接している、静電偏向素子。
【請求項5】
前記支持基板は、前記マイクロミラーを支持する弾性部材をさらに有していることを特徴とする、請求項1〜4のいずれか一つに記載の静電偏向素子。
【請求項6】
前記支持基板は、前記マイクロミラーに接続された弾性部材と、前記弾性部材を支持する支持要素をさらに有していることを特徴とする、請求項1〜4のいずれかに記載の静電偏向素子。
【請求項7】
前記駆動電極が、1列または複数列に並べて配置されていることを特徴とする、請求項1〜6のいずれか一つに記載の静電偏向素子。
【請求項8】
前記駆動電極が格子状に配置されていることを特徴とする、請求項1〜6のいずれか一つに記載の静電偏向素子。
【請求項9】
前記曲面が円筒面であることを特徴とする、請求項1〜8のいずれか一つに記載の静電偏向素子。
【請求項10】
前記曲面が球面であることを特徴とする、請求項1〜8のいずれか一つに記載の静電偏向素子。
【請求項11】
前記マイクロミラーは、前記マイクロミラーの前記対向面の反対側の面に反射面が形成されていることを特徴とする、請求項1〜10のいずれかに記載の静電偏向素子。
【請求項12】
請求項1〜11に記載の静電偏向素子を同一平面内に並べて配置することにより構成される、静電偏向素子アレイ。
【請求項13】
前記マイクロミラーを接地した状態で、前記駆動電極の少なくとも1個に接地電位と異なる電圧を印加することにより、前記マイクロミラーの構成要素の一部が接地電位と異なる電圧を印加された前記駆動電極の直上において前記支持基板の前記対向面に形成された構成要素のいずれかに接するまで前記マイクロミラーを偏向させることを特徴とする、請求項1〜11のいずれか一つに記載の静電偏向素子の制御方法。
【請求項14】
接地電位と異なる電圧を印加された前記駆動電極の周囲に配置された駆動電極に、接地電位と異なる電圧をさらに印加することを特徴とする、請求項13に記載の静電偏向素子の制御方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【公開番号】特開2013−37195(P2013−37195A)
【公開日】平成25年2月21日(2013.2.21)
【国際特許分類】
【出願番号】特願2011−173292(P2011−173292)
【出願日】平成23年8月8日(2011.8.8)
【出願人】(000000376)オリンパス株式会社 (11,466)
【Fターム(参考)】
【公開日】平成25年2月21日(2013.2.21)
【国際特許分類】
【出願日】平成23年8月8日(2011.8.8)
【出願人】(000000376)オリンパス株式会社 (11,466)
【Fターム(参考)】
[ Back to top ]