
静電容量式センサシステム
本発明は、物体の接近を検出する、特にジェスチャを認識する静電容量式センサシステムに関する。本発明の課題は、部品が簡単で、低コスト、空間要件も小さく実装でき、また、消費電力量が少なく低用量バッテリでも長時間作動できる、静電容量的に動作するセンサシステムの提供である。上記課題を解決する回路構成は、センサ電極周囲の誘電特性変化に基づいて、近似処理に関連する出力信号を生成する回路構成であって、少なくとも幾つかのセクションで、観察領域に隣接するセンサ電極と、交流電圧を出力するマイクロコントローラ(μC)と、該μCが出力した交流電圧のレベルを調整する分圧回路と、インピーダンス変換器として機能する電界効果トランジスタ(FET)と、を有し、該FETを、分圧回路が出力した電圧を、そのゲート入力に存在させると同時に、センサ電極(ES)でも存在するように、回路構成に組込むことを特徴とする。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、特に接近物体を検出する、また特にジェスチャを検出するための静電容量式センサシステムに関する。本発明は、近接電場に基づいて、典型的には手又は指の接近或は動きを検出し、これから情報を得、スイッチング動作を制御する又は空間ジェスチャを認識するのに使用できるセンサシステムに関する。
【背景技術】
【0002】
特に、ジェスチャを検出するのに、可視又は赤外領域における光学的処理がある。また、必要な情報を、電場の伝達又は妨害によって取得する静電容量的に機能するシステムが知られている。電気回路の費用やそうしたシステムを実現するのに関連するコストは、これまで高かった。従来のシステムの別の問題として、バッテリによる動作が必要な用途では、そうしたセンサの電力の必要量は、実際に適用可能にするのに不可欠である点が挙げられる。また、用途によっては、部品コストや空間要件が重要で、大量に適用する場合、例えば、玩具産業では、適用分野を左右することもある。
【0003】
静電容量式センサシステムに関しては、RCローパスフィルタ構造で静電容量変化を評価するものが知られている。励磁信号として、正弦波電圧又は矩形波信号が使用される。変化に関する信号表示として、基準信号と比較した振幅、位相、時間差が評価される。両アプローチ(振幅又は位相)では、基本容量Cと比較した静電容量の変化である相対的変化ΔC/Cが重要となる、というのも、これにより、センサ感度又はセンサの最大検出範囲が決定されるためである。従って感度を最大にするのに、場合によっては、基本容量を小さくするのが望ましい。
【発明の概要】
【発明が解決しようとする課題】
【0004】
本発明の目的は、僅かな部品費用で、従って、僅かなコストや空間要件で実現でき、更に、低充電容量のバッテリで及び/又は耐用年数を長く稼動可能にするために、低電力消費量を特徴とする、静電容量的に機能するセンサシステムを、提供することである。
【課題を解決するための手段】
【0005】
この目的を、特許請求項1の特徴を有する回路構成体によって、本発明により解決して、達成する。
【0006】
数個のこうしたシステムを用いて、二次元又は三次元位置検出が可能である。また、数個のセンサ電極を設け、マルチプレクサ装置でそのセンサ電極を順次回路に接続することも可能である。このマルチプレクサ回路は、マイクロコントローラによって始動できる。
【0007】
本発明による回路構成体の有利な実施形態を、従属クレームの対象とする。
【0008】
本発明の更なる詳細及び特徴については、図面と併せて、以下の記述から明らかである。
【図面の簡単な説明】
【0009】
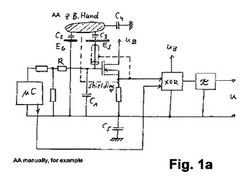
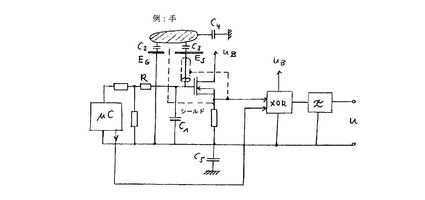
【図1a】本発明による回路の構造を示す回路図である。
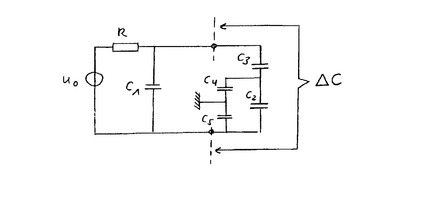
【図1b】物体が接近中の静電容量に関するコンデンサ装置(静電容量装置)の変化を更に示す等価回路である。
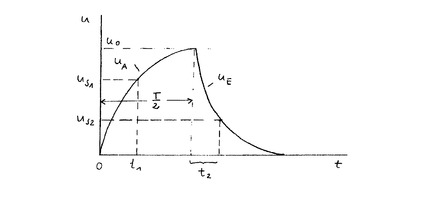
【図2】電圧上昇を示すグラフである。
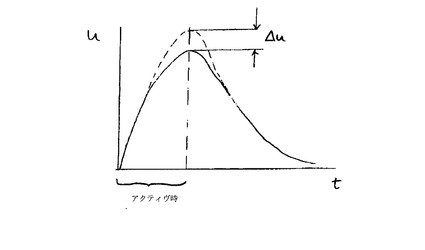
【図3】電圧上昇を示す別のグラフである。
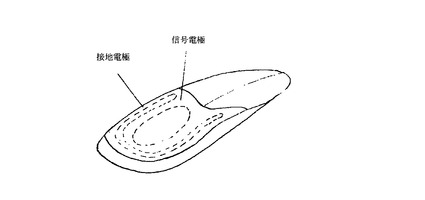
【図4】コンピュータマウスでの、本発明による回路の使用を示す図である。
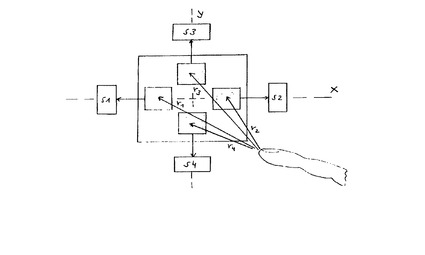
【図5】幾つかの検出電極を備えるジェスチャ検出システムの使用を示す図である。
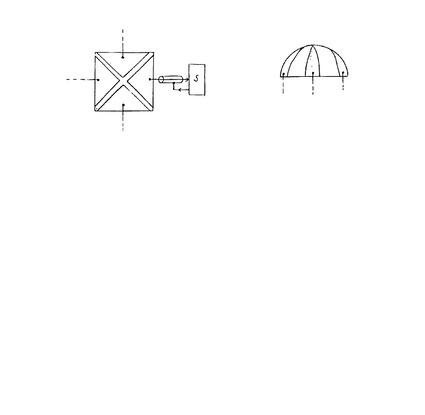
【図6】相対的に互いに接近させた検出電極を用いたジェスチャ検出システムを、本発明により実現したところを示す2図である。
【発明を実施するための形態】
【0010】
図1aでは、本発明による回路構成体を示している。この構成体は、本発明により組み立て構造化した静電容量式近接センサを備える。この回路構成体を、複製によりジェスチャ検出用センサシステムに拡張できる。
【0011】
まず、図1aで示したこの構成体の動作についてより詳しく説明する。マイクロコントローラ(μC)が供給する矩形波電圧の周波数域を好適には80〜120kHzとして、信号のレベルを分圧器によって電界効果トランジスタ(FET)のゲート端子で振幅u0まで調節すると、幾つかの静電容量的影響が、C1〜C5で表した箇所に作用するため、図2で示したように、指数関数的な充放電が発生する。
【0012】
寄生コンデンサが、回路構成体のESで表した信号電極と接地電極Egとの間で電界結合により形成される(C1)一方、他方で、これらの電極に接近する手の結合コンデンサC2及びC3により形成される。
【0013】
コンデンサC4及びC5を、手又は回路接地からアースへの結合コンデンサとする。初めに、接近がない基本的な状態(C2=C3=C4=0)での充放電について検討すると、C1だけが有効な状態となる。所定の閾値uS1に達する時間を、t1と仮定する。放電が、矩形信号のサイクル時間Tの半分経過後にuEに従い発生し、時間t2後に再び閾値uS2に達する。
【0014】
従って、
〔数1〕
uS1=u0(1−e-t1/RC1) uS2=u0e-t2/RC1 (1)
となり、この結果、スイッチング時間
〔数2〕
t1=−RC1 ln(1−uS1/u0) t2=−RC1 ln(uS2/u0) (2)
が出る。
【0015】
静電容量がΔCだけ変化してC1+ΔCになると、閾値に対する時間差は、
〔数3〕
Δt1=−RΔC ln(1−uS1/u0) 及び Δt2=−RΔC ln(uS2/u0) (3)
となり、時間差合計は、
〔数4〕
Δt=Δt1+Δt2=RΔC[ln(u0/uS2)−ln(1−uS1/u0)] (4)
となる。
【0016】
数4は、Δtが大きくなると、閾値uS1がu0に近くなり、uS2はu0と比べて小さくなることを示している。これは、閾値を選択する際に、適当なヒステリシスの閾値スイッチが好ましいことを意味している。
【0017】
uS1=uS2の場合には、閾値を出来る限りu0又は0に近くし、その結果数4の2項の内1項を出来る限り大きくすると、有利である。更に、充電抵抗及び静電容量変化ΔCが増えると、時間差、従ってセンサの感度は高くなる。充電抵抗を、矩形信号の半周期T/2毎に電界効果トランジスタのゲート端子で略完全な充放電が発生するようにしつつ、最大にする。
【0018】
Rを出来る限り大きくするので、この大きさは、ゲート端子とアース端子との間で有効な静電容量C1によって決まってくる(図1a参照)。こうした回路構成体の基本的な静電容量を、幾つかの寄生的な個別の静電容量で構成する。一部分を、FETのゲートソース静電容量で構成するが、その容量は、ソース抵抗による反結合で、入力に対する該容量の影響は大幅に減少する。一例の回路では、このようにして、その値を約0.2pFにできた。
【0019】
C1への更なる寄与を、信号電極ESと接地した電極EGとの間の結合容量で提供する。その結合容量を最小化するために、所謂シールド電極がその間に接続され、つまり、ソースフォロワの出力と接続され、その結果ゲート端子と略同じ電位となり、それによりESとEGとの結合が、大幅に減少する。これは、FET段の別の有利な側面である。また、FETのドレイン端子を使用して、信号電極ESをより離して接続する場合は、同軸ケーブルの編組を動かし、そうしてケーブル容量を減少でき、ここでも同様にC1に対して寄与するであろう。
【0020】
こうしたことから、FETをソースフォロワにして入力段として使用するとかなり有益であり、その上、部品費用を抑制でき、その結果電力の必要量とコストの両方を極めて低く抑えられることが、明らかである。
【0021】
接近した場合での充放電処理に関する時間的推移を評価するために、組込んだシュミットトリガによって入力をスイッチするXORゲート端子を使用し、その結果、スイッチング閾値uS1及びuS2用の追加コンパレータが不要となり、更なる部品を省くことができる。時間差は、XOR出力に接続したローパスフィルタによって得た直流電圧で表せる。供給電圧uBを用いると、数4と類似する。
〔数5〕
u=RC1uB/T[ln(u0/uS2)−ln(1−uS1/u0)] (5)
【0022】
ここで1/T=fと置くと、ローパス出力で形成した直流電圧は、μCで送出した矩形信号の周波数fに比例することが分かる。必然的に生じる許容誤差によって、例えば、閾値において、この電圧は生産過程で変動する場合があるため、許容誤差を補償する可能性として、接近がない場合に、常に出力電圧の結果が一定となるように、μCによって信号周波数を変動させることが挙げられる。
【0023】
接近を検出する感度に不可欠なのは、ゲート端子での静電容量変化ΔCであり、この変化は、数4により、対応する時間差Δtとなり、従ってローパス出力で、比例する電圧変化Δu〜ΔCとなる。既に上述したように、この変化は、何よりも接近した場合の有効な結合容量C2〜C5によって決まる。図1aの本構成体の等価回路(図1b)では、これらの効果について説明している。最初の最大限の変化が、センサの接地接続を直接アースに接続する場合に起こり、この場合、C2とC4の並列接続が最大限となるので、それによってもまたΔCは、最高値に達する。アースを用いた接地接続で、全く又は殆ど結合しない場合(C5〜0)については、C2とC3、即ち身体の一部、例えば手の結合容量の、電極ES及びEGへの直列接続が、変化を決定付ける。回路設計においては、従って、C2及びC3を出来る限り大きくし、C1を出来る限り小さくすること(例えば、シールドによって)が必須となる。
【0024】
接地電極EGへの結合は、必ずしも別の電極で行う必要はないが、適用によっては、例えば、バッテリによる異なる結合でも発生する可能性がある。図1aの本発明による構成体により、特に電極の形状や電極の構成に関して、多数の用途や設計可能性を作り出せるが、そうした形状や構成について、以下に実施例を示す。図1aで示した本発明による構成体は、部品に関して費用、つまりコストがかからず、必要とする空間が小さいだけでなく、実質的に電流がFETのソース抵抗を通過することにより、センサでの消費電力が極めて少ないという、特徴がある。この抵抗の値を数キロオームの範囲とした場合、1mAを遥かに下回る電流をそうして実現できる。この構成体の特殊性は、センサ動作を、特別な過渡電流の問題なく、パルス動作にできることである。バッテリ電力を用いる用途では、これは、数μAだけの範囲でバッテリ放電を保証し、従って長い耐用年数を保証するために、欠かせない手段となることが多い。パルスモードでは、ローパスフィルタの出力で直流電圧は全くないが、図3で表した充放電インパルスはある。接近した場合、パルス振幅は、数5による連続動作の値に相当する値Δuだけ上昇する。それに応じた低パルス/休止率を選択することで、μCを含む全電流を数μAにできる。
【0025】
以下では、センサ構成体の用途に関する2実施例を提示する。
【0026】
図4による第1実施例では、コードレスのコンピュータマウスを、バッテリ電流を出来る限り小さな値に抑えるために、手が接近した場合に、本発明によるセンサによってアクティブ状態にスイッチする。このために、信号電極をケースの上側シェルの内側の一部に取付け、且つ縞状の接地電極で囲んでもよい。厳密な電極の設計は、その都度ケースの形状によって決まるが、このケースについては、マウスの電子部品の設計や夫々のバッテリ供給に応じて、十分な手の接地結合が、他の方法、例えばバッテリによって発生すれば、別のアース端子の電子部品を使わずに済む。例えば、1:1000の割合でパルスモードを適用することで、バッテリからの電力消費量を、このセンサで1〜2μAに抑えることができる。
【0027】
近接センサの用途に関する別の実施例を、4電極系によるジェスチャの検出についてとし、その原理を図5に詳細に示す。センサ電子部品を含む電極系を、既に存在する様々な種類の機器にコンパクトに一体化可能にするために、場合によっては小空間に集中させたコンパクトな形のままとする。このように、また、既にこれまで説明した更なる効果、つまり低電流消費量という、バッテリ用途の観点のみならず、経済的実現の観点からの効果も生じる。その役割は、センサが送出した情報から、電極で画定した平面に対するジェスチャのx/y座標を推定することである。
【0028】
そのために、図5によるシステムでは、ジェスチャを実行する指から距離r1〜r4を取込む。従って、空間座標系x、y、zにおいて、原点から電極質量中心の間隔をaとして、以下の4式が生じる。
〔数6〕
r12=(x−a)2+y2+z2 (6)
〔数7〕
r22=(x+a)2+y2+z2 (7)
〔数8〕
r32=x2+(y+a)2+z2 (8)
〔数9〕
r42=x2+(y−a)2+z2 (9)
【0029】
数6と数7の差又は数8と数9の差をそれぞれ求めることで、下記数10に示すx/y座標を即座に得られる。
〔数10〕
x=(r12−r22)/4a (10)
y=(r32−r42)/4a (10)
【0030】
数6〜数10が示すように、x/y座標をzとは関係無く簡単に計算できる。そのために距離r1〜r4を、4つのセンサS1〜S4の出力に印加する信号から決定する必要がある。これらの信号差のみを、基本状態と比べて、接近した場合の結果であると見なす。これらの差分信号をe1〜e4で示し、電界効果トランジスタの各ゲート端子での上述した容量変動から、推定する。そのために決めてとなるのは、その都度指の電極に対する結合容量であり、結合容量は電極からの距離が遠くなる程小さくなる。これまでの記述によれば、信号差から生じた振幅は、容量変化と比例するので、これらの値は、距離が離れる程減少する。このため、近似によりべき乗則を、
〔数11〕

により仮定する。
【0031】
指数αについて、実際には電極構成体に応じて2…3とする。
【0032】
rに対する数11の解は、
〔数12〕
となる。
【0033】
次に、数10で、座標を、信号e1からe4まで計算できる。
〔数13〕
〔数14〕
【0034】
定数e0、r0、aは、ここでは、電極の形や電極相互の方位によって決まる。
【0035】
図6では、異なる電極構成体を示すが、この構成体は、電子部品に短い接続線で直接接続し、その結果ほんの数cm2の大きさきさで、且つ他のシステムに容易に組込めるコンパクトなユニットを形成するものか、同軸ケーブルによって、電子部品からより離すことができ、そのために好適には、ゲート端子接続部で基本容量C1を低く保つために、ケーブルの編組を、センサのシールド出力(FETのソース接続)と接続するものとする。
【0036】
[本構成体の利点]
手短に、静電容量式近接センサに関する本発明による構成体が有する、以下の利点について、改めて強調する。
1.部品の費用が、1つのFET入力段のみ、1つのXORゲート端子、2〜3つの抵抗、及びコンデンサだけとなるため、極めて安くなる。信号生成と処理に必要なマイクロコントローラは、他のシステムにセンサを組込む場合に、既に存在することが多く、単純な必要なセンサ機能にも使用できる。
2.ソースフォロワとしてスイッチされるFETは、反結合のため、ほんの僅かなセンサの固有容量を与えるだけでなく、センサの感度を決定する基本容量を減少させるために、シールド動作への出力としても機能できる。その上、この手段により、センサ機能が高温でも安定し、サンプルのばらつきを軽減できる。
3.能動部品が少数となる結果、極めて消費電力が低くなるが、これはパルス動作で動作するために本構成体の過渡プロセスが極めて短くなることで、僅か数μAにまで減少でき、それによりバッテリで動かした場合に、かなりの効果が得られる。
4.電極配置を適切に選択することで、必要なアースへの結合に関する接近機能の問題を解決できる。これは、バッテリ電源を用いた用途には不可欠である。
5.許容誤差が存在するために必要なセンサの自己較正を、周波数調整による簡単な方法で行うことができる。
6.ゲート端子で充電抵抗を変動させて、異なる電極サイズによる異なる電極容量に対して極めて柔軟な調整を行うことができる。更に、このようにして、外乱に対しても最適な周波数調整を行なえる。
7.センサの反応時間を、場合によっては高信号周波数を柔軟に選択して、数ミリ秒まで減少できる。
8.ジェスチャ検出用センサでのような多電極構成体の場合には、センサ全体を、コンパクトに僅か数cm2に収容できる。
【0037】
本発明による回路の場合の特別な手段は特に単純であり、従って近接センサの電力及びコスト節減を、1つのFET段だけと、追加のコンパレータを必要としない下流のEXORゲートとで、実現できる。他方では、FET段では、FETをソースフォロワとしてスイッチさせた場合、極めて僅かな入力容量を与え、その結果、高直列抵抗によって従来のセンサの感度より50倍高い感度を決定できる。更に、それに加えて、この構成におけるこの段により、重要な設置状況において基本的な入力容量を低く保てるシールド機能を提供し、従って、関連する感度損失も発生しない。
【0038】
従来のセンサとの比較で、本発明の近接センサをRCによる処理により、部品数を少なくして実現しても、動作効率が高くなることが明らかである。
【0039】
本発明による概念は、とりわけ低電力消費量を特徴とし、特にバッテリ用途に適している。回路構成体の能動部品数や空間要件で主に決まるコストは、従来の概念のものよりも明らかに低い。本発明による回路概念は、ジェスチャ用途について、複数のセンサを同時に動作させるシステムに対して、とりわけ有利な方法であるという点で、適している。
【技術分野】
【0001】
本発明は、特に接近物体を検出する、また特にジェスチャを検出するための静電容量式センサシステムに関する。本発明は、近接電場に基づいて、典型的には手又は指の接近或は動きを検出し、これから情報を得、スイッチング動作を制御する又は空間ジェスチャを認識するのに使用できるセンサシステムに関する。
【背景技術】
【0002】
特に、ジェスチャを検出するのに、可視又は赤外領域における光学的処理がある。また、必要な情報を、電場の伝達又は妨害によって取得する静電容量的に機能するシステムが知られている。電気回路の費用やそうしたシステムを実現するのに関連するコストは、これまで高かった。従来のシステムの別の問題として、バッテリによる動作が必要な用途では、そうしたセンサの電力の必要量は、実際に適用可能にするのに不可欠である点が挙げられる。また、用途によっては、部品コストや空間要件が重要で、大量に適用する場合、例えば、玩具産業では、適用分野を左右することもある。
【0003】
静電容量式センサシステムに関しては、RCローパスフィルタ構造で静電容量変化を評価するものが知られている。励磁信号として、正弦波電圧又は矩形波信号が使用される。変化に関する信号表示として、基準信号と比較した振幅、位相、時間差が評価される。両アプローチ(振幅又は位相)では、基本容量Cと比較した静電容量の変化である相対的変化ΔC/Cが重要となる、というのも、これにより、センサ感度又はセンサの最大検出範囲が決定されるためである。従って感度を最大にするのに、場合によっては、基本容量を小さくするのが望ましい。
【発明の概要】
【発明が解決しようとする課題】
【0004】
本発明の目的は、僅かな部品費用で、従って、僅かなコストや空間要件で実現でき、更に、低充電容量のバッテリで及び/又は耐用年数を長く稼動可能にするために、低電力消費量を特徴とする、静電容量的に機能するセンサシステムを、提供することである。
【課題を解決するための手段】
【0005】
この目的を、特許請求項1の特徴を有する回路構成体によって、本発明により解決して、達成する。
【0006】
数個のこうしたシステムを用いて、二次元又は三次元位置検出が可能である。また、数個のセンサ電極を設け、マルチプレクサ装置でそのセンサ電極を順次回路に接続することも可能である。このマルチプレクサ回路は、マイクロコントローラによって始動できる。
【0007】
本発明による回路構成体の有利な実施形態を、従属クレームの対象とする。
【0008】
本発明の更なる詳細及び特徴については、図面と併せて、以下の記述から明らかである。
【図面の簡単な説明】
【0009】
【図1a】本発明による回路の構造を示す回路図である。
【図1b】物体が接近中の静電容量に関するコンデンサ装置(静電容量装置)の変化を更に示す等価回路である。
【図2】電圧上昇を示すグラフである。
【図3】電圧上昇を示す別のグラフである。
【図4】コンピュータマウスでの、本発明による回路の使用を示す図である。
【図5】幾つかの検出電極を備えるジェスチャ検出システムの使用を示す図である。
【図6】相対的に互いに接近させた検出電極を用いたジェスチャ検出システムを、本発明により実現したところを示す2図である。
【発明を実施するための形態】
【0010】
図1aでは、本発明による回路構成体を示している。この構成体は、本発明により組み立て構造化した静電容量式近接センサを備える。この回路構成体を、複製によりジェスチャ検出用センサシステムに拡張できる。
【0011】
まず、図1aで示したこの構成体の動作についてより詳しく説明する。マイクロコントローラ(μC)が供給する矩形波電圧の周波数域を好適には80〜120kHzとして、信号のレベルを分圧器によって電界効果トランジスタ(FET)のゲート端子で振幅u0まで調節すると、幾つかの静電容量的影響が、C1〜C5で表した箇所に作用するため、図2で示したように、指数関数的な充放電が発生する。
【0012】
寄生コンデンサが、回路構成体のESで表した信号電極と接地電極Egとの間で電界結合により形成される(C1)一方、他方で、これらの電極に接近する手の結合コンデンサC2及びC3により形成される。
【0013】
コンデンサC4及びC5を、手又は回路接地からアースへの結合コンデンサとする。初めに、接近がない基本的な状態(C2=C3=C4=0)での充放電について検討すると、C1だけが有効な状態となる。所定の閾値uS1に達する時間を、t1と仮定する。放電が、矩形信号のサイクル時間Tの半分経過後にuEに従い発生し、時間t2後に再び閾値uS2に達する。
【0014】
従って、
〔数1〕
uS1=u0(1−e-t1/RC1) uS2=u0e-t2/RC1 (1)
となり、この結果、スイッチング時間
〔数2〕
t1=−RC1 ln(1−uS1/u0) t2=−RC1 ln(uS2/u0) (2)
が出る。
【0015】
静電容量がΔCだけ変化してC1+ΔCになると、閾値に対する時間差は、
〔数3〕
Δt1=−RΔC ln(1−uS1/u0) 及び Δt2=−RΔC ln(uS2/u0) (3)
となり、時間差合計は、
〔数4〕
Δt=Δt1+Δt2=RΔC[ln(u0/uS2)−ln(1−uS1/u0)] (4)
となる。
【0016】
数4は、Δtが大きくなると、閾値uS1がu0に近くなり、uS2はu0と比べて小さくなることを示している。これは、閾値を選択する際に、適当なヒステリシスの閾値スイッチが好ましいことを意味している。
【0017】
uS1=uS2の場合には、閾値を出来る限りu0又は0に近くし、その結果数4の2項の内1項を出来る限り大きくすると、有利である。更に、充電抵抗及び静電容量変化ΔCが増えると、時間差、従ってセンサの感度は高くなる。充電抵抗を、矩形信号の半周期T/2毎に電界効果トランジスタのゲート端子で略完全な充放電が発生するようにしつつ、最大にする。
【0018】
Rを出来る限り大きくするので、この大きさは、ゲート端子とアース端子との間で有効な静電容量C1によって決まってくる(図1a参照)。こうした回路構成体の基本的な静電容量を、幾つかの寄生的な個別の静電容量で構成する。一部分を、FETのゲートソース静電容量で構成するが、その容量は、ソース抵抗による反結合で、入力に対する該容量の影響は大幅に減少する。一例の回路では、このようにして、その値を約0.2pFにできた。
【0019】
C1への更なる寄与を、信号電極ESと接地した電極EGとの間の結合容量で提供する。その結合容量を最小化するために、所謂シールド電極がその間に接続され、つまり、ソースフォロワの出力と接続され、その結果ゲート端子と略同じ電位となり、それによりESとEGとの結合が、大幅に減少する。これは、FET段の別の有利な側面である。また、FETのドレイン端子を使用して、信号電極ESをより離して接続する場合は、同軸ケーブルの編組を動かし、そうしてケーブル容量を減少でき、ここでも同様にC1に対して寄与するであろう。
【0020】
こうしたことから、FETをソースフォロワにして入力段として使用するとかなり有益であり、その上、部品費用を抑制でき、その結果電力の必要量とコストの両方を極めて低く抑えられることが、明らかである。
【0021】
接近した場合での充放電処理に関する時間的推移を評価するために、組込んだシュミットトリガによって入力をスイッチするXORゲート端子を使用し、その結果、スイッチング閾値uS1及びuS2用の追加コンパレータが不要となり、更なる部品を省くことができる。時間差は、XOR出力に接続したローパスフィルタによって得た直流電圧で表せる。供給電圧uBを用いると、数4と類似する。
〔数5〕
u=RC1uB/T[ln(u0/uS2)−ln(1−uS1/u0)] (5)
【0022】
ここで1/T=fと置くと、ローパス出力で形成した直流電圧は、μCで送出した矩形信号の周波数fに比例することが分かる。必然的に生じる許容誤差によって、例えば、閾値において、この電圧は生産過程で変動する場合があるため、許容誤差を補償する可能性として、接近がない場合に、常に出力電圧の結果が一定となるように、μCによって信号周波数を変動させることが挙げられる。
【0023】
接近を検出する感度に不可欠なのは、ゲート端子での静電容量変化ΔCであり、この変化は、数4により、対応する時間差Δtとなり、従ってローパス出力で、比例する電圧変化Δu〜ΔCとなる。既に上述したように、この変化は、何よりも接近した場合の有効な結合容量C2〜C5によって決まる。図1aの本構成体の等価回路(図1b)では、これらの効果について説明している。最初の最大限の変化が、センサの接地接続を直接アースに接続する場合に起こり、この場合、C2とC4の並列接続が最大限となるので、それによってもまたΔCは、最高値に達する。アースを用いた接地接続で、全く又は殆ど結合しない場合(C5〜0)については、C2とC3、即ち身体の一部、例えば手の結合容量の、電極ES及びEGへの直列接続が、変化を決定付ける。回路設計においては、従って、C2及びC3を出来る限り大きくし、C1を出来る限り小さくすること(例えば、シールドによって)が必須となる。
【0024】
接地電極EGへの結合は、必ずしも別の電極で行う必要はないが、適用によっては、例えば、バッテリによる異なる結合でも発生する可能性がある。図1aの本発明による構成体により、特に電極の形状や電極の構成に関して、多数の用途や設計可能性を作り出せるが、そうした形状や構成について、以下に実施例を示す。図1aで示した本発明による構成体は、部品に関して費用、つまりコストがかからず、必要とする空間が小さいだけでなく、実質的に電流がFETのソース抵抗を通過することにより、センサでの消費電力が極めて少ないという、特徴がある。この抵抗の値を数キロオームの範囲とした場合、1mAを遥かに下回る電流をそうして実現できる。この構成体の特殊性は、センサ動作を、特別な過渡電流の問題なく、パルス動作にできることである。バッテリ電力を用いる用途では、これは、数μAだけの範囲でバッテリ放電を保証し、従って長い耐用年数を保証するために、欠かせない手段となることが多い。パルスモードでは、ローパスフィルタの出力で直流電圧は全くないが、図3で表した充放電インパルスはある。接近した場合、パルス振幅は、数5による連続動作の値に相当する値Δuだけ上昇する。それに応じた低パルス/休止率を選択することで、μCを含む全電流を数μAにできる。
【0025】
以下では、センサ構成体の用途に関する2実施例を提示する。
【0026】
図4による第1実施例では、コードレスのコンピュータマウスを、バッテリ電流を出来る限り小さな値に抑えるために、手が接近した場合に、本発明によるセンサによってアクティブ状態にスイッチする。このために、信号電極をケースの上側シェルの内側の一部に取付け、且つ縞状の接地電極で囲んでもよい。厳密な電極の設計は、その都度ケースの形状によって決まるが、このケースについては、マウスの電子部品の設計や夫々のバッテリ供給に応じて、十分な手の接地結合が、他の方法、例えばバッテリによって発生すれば、別のアース端子の電子部品を使わずに済む。例えば、1:1000の割合でパルスモードを適用することで、バッテリからの電力消費量を、このセンサで1〜2μAに抑えることができる。
【0027】
近接センサの用途に関する別の実施例を、4電極系によるジェスチャの検出についてとし、その原理を図5に詳細に示す。センサ電子部品を含む電極系を、既に存在する様々な種類の機器にコンパクトに一体化可能にするために、場合によっては小空間に集中させたコンパクトな形のままとする。このように、また、既にこれまで説明した更なる効果、つまり低電流消費量という、バッテリ用途の観点のみならず、経済的実現の観点からの効果も生じる。その役割は、センサが送出した情報から、電極で画定した平面に対するジェスチャのx/y座標を推定することである。
【0028】
そのために、図5によるシステムでは、ジェスチャを実行する指から距離r1〜r4を取込む。従って、空間座標系x、y、zにおいて、原点から電極質量中心の間隔をaとして、以下の4式が生じる。
〔数6〕
r12=(x−a)2+y2+z2 (6)
〔数7〕
r22=(x+a)2+y2+z2 (7)
〔数8〕
r32=x2+(y+a)2+z2 (8)
〔数9〕
r42=x2+(y−a)2+z2 (9)
【0029】
数6と数7の差又は数8と数9の差をそれぞれ求めることで、下記数10に示すx/y座標を即座に得られる。
〔数10〕
x=(r12−r22)/4a (10)
y=(r32−r42)/4a (10)
【0030】
数6〜数10が示すように、x/y座標をzとは関係無く簡単に計算できる。そのために距離r1〜r4を、4つのセンサS1〜S4の出力に印加する信号から決定する必要がある。これらの信号差のみを、基本状態と比べて、接近した場合の結果であると見なす。これらの差分信号をe1〜e4で示し、電界効果トランジスタの各ゲート端子での上述した容量変動から、推定する。そのために決めてとなるのは、その都度指の電極に対する結合容量であり、結合容量は電極からの距離が遠くなる程小さくなる。これまでの記述によれば、信号差から生じた振幅は、容量変化と比例するので、これらの値は、距離が離れる程減少する。このため、近似によりべき乗則を、
〔数11〕
により仮定する。
【0031】
指数αについて、実際には電極構成体に応じて2…3とする。
【0032】
rに対する数11の解は、
〔数12〕
となる。
【0033】
次に、数10で、座標を、信号e1からe4まで計算できる。
〔数13〕
〔数14〕
【0034】
定数e0、r0、aは、ここでは、電極の形や電極相互の方位によって決まる。
【0035】
図6では、異なる電極構成体を示すが、この構成体は、電子部品に短い接続線で直接接続し、その結果ほんの数cm2の大きさきさで、且つ他のシステムに容易に組込めるコンパクトなユニットを形成するものか、同軸ケーブルによって、電子部品からより離すことができ、そのために好適には、ゲート端子接続部で基本容量C1を低く保つために、ケーブルの編組を、センサのシールド出力(FETのソース接続)と接続するものとする。
【0036】
[本構成体の利点]
手短に、静電容量式近接センサに関する本発明による構成体が有する、以下の利点について、改めて強調する。
1.部品の費用が、1つのFET入力段のみ、1つのXORゲート端子、2〜3つの抵抗、及びコンデンサだけとなるため、極めて安くなる。信号生成と処理に必要なマイクロコントローラは、他のシステムにセンサを組込む場合に、既に存在することが多く、単純な必要なセンサ機能にも使用できる。
2.ソースフォロワとしてスイッチされるFETは、反結合のため、ほんの僅かなセンサの固有容量を与えるだけでなく、センサの感度を決定する基本容量を減少させるために、シールド動作への出力としても機能できる。その上、この手段により、センサ機能が高温でも安定し、サンプルのばらつきを軽減できる。
3.能動部品が少数となる結果、極めて消費電力が低くなるが、これはパルス動作で動作するために本構成体の過渡プロセスが極めて短くなることで、僅か数μAにまで減少でき、それによりバッテリで動かした場合に、かなりの効果が得られる。
4.電極配置を適切に選択することで、必要なアースへの結合に関する接近機能の問題を解決できる。これは、バッテリ電源を用いた用途には不可欠である。
5.許容誤差が存在するために必要なセンサの自己較正を、周波数調整による簡単な方法で行うことができる。
6.ゲート端子で充電抵抗を変動させて、異なる電極サイズによる異なる電極容量に対して極めて柔軟な調整を行うことができる。更に、このようにして、外乱に対しても最適な周波数調整を行なえる。
7.センサの反応時間を、場合によっては高信号周波数を柔軟に選択して、数ミリ秒まで減少できる。
8.ジェスチャ検出用センサでのような多電極構成体の場合には、センサ全体を、コンパクトに僅か数cm2に収容できる。
【0037】
本発明による回路の場合の特別な手段は特に単純であり、従って近接センサの電力及びコスト節減を、1つのFET段だけと、追加のコンパレータを必要としない下流のEXORゲートとで、実現できる。他方では、FET段では、FETをソースフォロワとしてスイッチさせた場合、極めて僅かな入力容量を与え、その結果、高直列抵抗によって従来のセンサの感度より50倍高い感度を決定できる。更に、それに加えて、この構成におけるこの段により、重要な設置状況において基本的な入力容量を低く保てるシールド機能を提供し、従って、関連する感度損失も発生しない。
【0038】
従来のセンサとの比較で、本発明の近接センサをRCによる処理により、部品数を少なくして実現しても、動作効率が高くなることが明らかである。
【0039】
本発明による概念は、とりわけ低電力消費量を特徴とし、特にバッテリ用途に適している。回路構成体の能動部品数や空間要件で主に決まるコストは、従来の概念のものよりも明らかに低い。本発明による回路概念は、ジェスチャ用途について、複数のセンサを同時に動作させるシステムに対して、とりわけ有利な方法であるという点で、適している。
【特許請求の範囲】
【請求項1】
センサ電極の環境に関する誘電特性の変化に基づいて、接近に関連する出力信号を生成する回路構成体であって、この回路構成体は、
少なくとも部分的に観察領域と並置したセンサ電極と、
交流電圧を出力するマイクロコントローラ(μC)と、
前記マイクロコントローラ(μC)が出力した前記交流電圧のレベルを調整する分圧器と、
インピーダンス変換器として動作する電界効果トランジスタ(FET)と、を備え、
前記分圧器が出力した電圧を、そのゲート端子に印加すると同時に、前記センサ電極(ES)にも印加するように、前記電界効果トランジスタを前記回路構成体に組込むこと、
を特徴とする回路構成体。
【請求項2】
前記電界効果トランジスタを、ソースフォロワにして入力段として前記回路構成体に組込むことを特徴とする、請求項1に記載の回路構成体。
【請求項3】
前記FETの前記ゲート端子の容量と、アース端子に対する前記電極の容量と、構造的に条件付けた回路コンデンサとで形成した寄生コンデンサの効果を、センサ機能用コンデンサ装置C1として使用することを特徴とする、請求項2に記載の回路構成体。
【請求項4】
充電抵抗(R)を、前記コンデンサ装置C1及び前記ゲート端子の上流に配置することを特徴とする、請求項3に記載の回路構成体。
【請求項5】
前記マイクロコントローラが送出する矩形波電圧を、80〜120kHzの周波数範囲とすることを特徴とする、請求項1乃至4の少なくとも1項に記載の回路構成体。
【請求項6】
前記コンデンサ装置を、時間間隔t1に亘り所定の閾値uS1に達するまで充電し、前記矩形信号のサイクル時間Tの半分後に放電することを特徴とする、請求項1乃至5の少なくとも1項に記載の回路構成体。
【請求項7】
前記スイッチング時間を、
t1=−RC1 ln(1−uS1/u0)と
t2=−RC1 ln(uS2/u0)
とを適用して調整することを特徴とする、請求項6に記載の回路構成体。
【請求項8】
前記接近を、時間差に基づいて検出することを特徴とする、請求項1乃至7の少なくとも1項に記載の回路構成体。
【請求項9】
前記充電抵抗を、前記矩形信号の半周期T/2毎に前記電界効果トランジスタの前記ゲート端子で略完全に充放電するようにしつつ、最大にするように決定することを特徴とする、請求項1乃至8の少なくとも1項に記載の回路構成体。
【請求項10】
アース端子に接続する結合電極EGを設けることを特徴とする、請求項1乃至9の少なくとも1項に記載の回路構成体。
【請求項11】
前記結合電極EGを、ESとEGとの間の結合容量の形で、C1への更なる寄与を提供することを特徴とする、請求項10に記載の回路構成体。
【請求項12】
シールド電極を、前記信号電極ESとアース端子に接続した電極EGとの間に設けることを特徴とする、請求項11に記載の回路構成体。
【請求項13】
前記シールド電極を、ソースフォロワの前記出力に接続し、前記ゲート端子と略等しい電位とし、それによりESとEGの結合を減少させることを特徴とする、請求項12に記載の回路構成体。
【請求項14】
前記FETの前記ドレイン端子を、前記信号電極ESをより離れて接続する場合に、前記ケーブル容量を減少するために、同軸ケーブルの前記編組を利用することを特徴とする、請求項1乃至13の少なくとも1項に記載の回路構成体。
【請求項15】
接近した場合での前記充放電処理に関する時間的推移を評価するために、組込んだシュミットトリガによって前記入力をスイッチできるXORゲート端子を使用することを特徴とする、請求項1乃至14の少なくとも1項に記載の回路構成体。
【請求項16】
前記時間差は、前記XOR出力に接続したローパスフィルタによって得た直流電圧で表せることを特徴とする、請求項15に記載の回路構成体。
【請求項17】
センサ電極が変化するために、前記環境の誘電特性に関して、接近に関連する出力信号を生成する回路構成体であって、前記回路構成体は、
少なくとも部分的に観察領域と並置したセンサ電極と、
交流電圧を出力するマイクロコントローラ(μC) と、
前記マイクロコントローラ(μC)が出力した前記交流電圧のレベルを調整する分圧器と、
インピーダンス変換器として動作する電界効果トランジスタ(FET)と、を備え、
前記回路を、充電時間に対する放電時間の割合の変化と関連する事象に基づいて、接近を検出するように構成することを特徴とする回路構成体。
【請求項1】
センサ電極の環境に関する誘電特性の変化に基づいて、接近に関連する出力信号を生成する回路構成体であって、この回路構成体は、
少なくとも部分的に観察領域と並置したセンサ電極と、
交流電圧を出力するマイクロコントローラ(μC)と、
前記マイクロコントローラ(μC)が出力した前記交流電圧のレベルを調整する分圧器と、
インピーダンス変換器として動作する電界効果トランジスタ(FET)と、を備え、
前記分圧器が出力した電圧を、そのゲート端子に印加すると同時に、前記センサ電極(ES)にも印加するように、前記電界効果トランジスタを前記回路構成体に組込むこと、
を特徴とする回路構成体。
【請求項2】
前記電界効果トランジスタを、ソースフォロワにして入力段として前記回路構成体に組込むことを特徴とする、請求項1に記載の回路構成体。
【請求項3】
前記FETの前記ゲート端子の容量と、アース端子に対する前記電極の容量と、構造的に条件付けた回路コンデンサとで形成した寄生コンデンサの効果を、センサ機能用コンデンサ装置C1として使用することを特徴とする、請求項2に記載の回路構成体。
【請求項4】
充電抵抗(R)を、前記コンデンサ装置C1及び前記ゲート端子の上流に配置することを特徴とする、請求項3に記載の回路構成体。
【請求項5】
前記マイクロコントローラが送出する矩形波電圧を、80〜120kHzの周波数範囲とすることを特徴とする、請求項1乃至4の少なくとも1項に記載の回路構成体。
【請求項6】
前記コンデンサ装置を、時間間隔t1に亘り所定の閾値uS1に達するまで充電し、前記矩形信号のサイクル時間Tの半分後に放電することを特徴とする、請求項1乃至5の少なくとも1項に記載の回路構成体。
【請求項7】
前記スイッチング時間を、
t1=−RC1 ln(1−uS1/u0)と
t2=−RC1 ln(uS2/u0)
とを適用して調整することを特徴とする、請求項6に記載の回路構成体。
【請求項8】
前記接近を、時間差に基づいて検出することを特徴とする、請求項1乃至7の少なくとも1項に記載の回路構成体。
【請求項9】
前記充電抵抗を、前記矩形信号の半周期T/2毎に前記電界効果トランジスタの前記ゲート端子で略完全に充放電するようにしつつ、最大にするように決定することを特徴とする、請求項1乃至8の少なくとも1項に記載の回路構成体。
【請求項10】
アース端子に接続する結合電極EGを設けることを特徴とする、請求項1乃至9の少なくとも1項に記載の回路構成体。
【請求項11】
前記結合電極EGを、ESとEGとの間の結合容量の形で、C1への更なる寄与を提供することを特徴とする、請求項10に記載の回路構成体。
【請求項12】
シールド電極を、前記信号電極ESとアース端子に接続した電極EGとの間に設けることを特徴とする、請求項11に記載の回路構成体。
【請求項13】
前記シールド電極を、ソースフォロワの前記出力に接続し、前記ゲート端子と略等しい電位とし、それによりESとEGの結合を減少させることを特徴とする、請求項12に記載の回路構成体。
【請求項14】
前記FETの前記ドレイン端子を、前記信号電極ESをより離れて接続する場合に、前記ケーブル容量を減少するために、同軸ケーブルの前記編組を利用することを特徴とする、請求項1乃至13の少なくとも1項に記載の回路構成体。
【請求項15】
接近した場合での前記充放電処理に関する時間的推移を評価するために、組込んだシュミットトリガによって前記入力をスイッチできるXORゲート端子を使用することを特徴とする、請求項1乃至14の少なくとも1項に記載の回路構成体。
【請求項16】
前記時間差は、前記XOR出力に接続したローパスフィルタによって得た直流電圧で表せることを特徴とする、請求項15に記載の回路構成体。
【請求項17】
センサ電極が変化するために、前記環境の誘電特性に関して、接近に関連する出力信号を生成する回路構成体であって、前記回路構成体は、
少なくとも部分的に観察領域と並置したセンサ電極と、
交流電圧を出力するマイクロコントローラ(μC) と、
前記マイクロコントローラ(μC)が出力した前記交流電圧のレベルを調整する分圧器と、
インピーダンス変換器として動作する電界効果トランジスタ(FET)と、を備え、
前記回路を、充電時間に対する放電時間の割合の変化と関連する事象に基づいて、接近を検出するように構成することを特徴とする回路構成体。
【図1a】

【図1b】
【図2】
【図3】
【図4】
【図5】
【図6】
【図1b】
【図2】
【図3】
【図4】
【図5】
【図6】
【公表番号】特表2012−509610(P2012−509610A)
【公表日】平成24年4月19日(2012.4.19)
【国際特許分類】
【出願番号】特願2011−535931(P2011−535931)
【出願日】平成21年11月18日(2009.11.18)
【国際出願番号】PCT/EP2009/008213
【国際公開番号】WO2010/057625
【国際公開日】平成22年5月27日(2010.5.27)
【出願人】(507113199)イデント テクノロジー アーゲー (19)
【Fターム(参考)】
【公表日】平成24年4月19日(2012.4.19)
【国際特許分類】
【出願日】平成21年11月18日(2009.11.18)
【国際出願番号】PCT/EP2009/008213
【国際公開番号】WO2010/057625
【国際公開日】平成22年5月27日(2010.5.27)
【出願人】(507113199)イデント テクノロジー アーゲー (19)
【Fターム(参考)】
[ Back to top ]