
静電容量検出型入力装置
【課題】円周上の所定位置の適度な荷重での押下を検知できるようにした静電容量検出型入力装置を構成する。
【解決手段】静電容量検出型入力装置101は、フレキシブル基板10と、このフレキシブル基板10に重ねられる導電性ラバー20と、この導電性ラバー20に一体化された金属製または樹脂製のリング状の可動板30と、導電性ラバー20をフレキシブル基板10に重ねた状態で固定するフレーム50および補強板40を備えている。導電性ラバー20は絶縁層11を介して固定電極61およびZ軸方向検出電極62に対向するテーパー形状部22を有する。固定電極61は複数の円弧状の固定電極で構成されていて、各円弧状の固定電極は放射方向に外方へ延びる複数の櫛歯状電極部とそれらの櫛歯状電極部を内周寄りの位置で繋ぐ連結部とで構成されている。
【解決手段】静電容量検出型入力装置101は、フレキシブル基板10と、このフレキシブル基板10に重ねられる導電性ラバー20と、この導電性ラバー20に一体化された金属製または樹脂製のリング状の可動板30と、導電性ラバー20をフレキシブル基板10に重ねた状態で固定するフレーム50および補強板40を備えている。導電性ラバー20は絶縁層11を介して固定電極61およびZ軸方向検出電極62に対向するテーパー形状部22を有する。固定電極61は複数の円弧状の固定電極で構成されていて、各円弧状の固定電極は放射方向に外方へ延びる複数の櫛歯状電極部とそれらの櫛歯状電極部を内周寄りの位置で繋ぐ連結部とで構成されている。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、操作者の入力操作によって変化する静電容量の変化を検出して入力操作を検知する静電容量検出型入力装置に関する。
【背景技術】
【0002】
表面に水平方向の入力を感知する複数の電極をそれぞれ円周方向に分割して設けた固定電極と、その固定電極との間にギャップを有して対向する部分に導電性の可動電極を設け、入力操作により可動電極が弾性変形してギャップが変化する弾性体と、この弾性体に突出形成した連結部に連結可能なキートップとを備え、固定電極上に絶縁膜を形成し、可動電極は、固定電極と対向する部分が固定電極の外周部寄りから中心部に向けてギャップの大きさが異なるテーパー状に形成した入力装置が特許文献1に示されている。
【0003】
また、補強板をインサート成形した導電性ラバーと、このラバーが対向する位置に電極が形成された基板と、導電性ラバーを収容するケースを備えた入力装置が特許文献2に示されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2002−8495号公報
【特許文献2】国際公開WO2007/057943号
【発明の概要】
【発明が解決しようとする課題】
【0005】
特許文献1の入力装置においては、固定電極と可動電極との間隔変化に対する静電容量変化が急峻であるので、低荷重の押下でも検知されてしまい、微妙な押圧力の違いによる入力操作を検知し難い。
【0006】
また、特許文献2の入力装置においては、ラバーの変形の安定性および復元性が高いが、中心が操作部であるので、例えば円周上の所定位置を押下して水平方向の方向入力操作を行うことはできない。
【0007】
本発明は上述の課題を解決するためになされたものであり、その目的は、円周上の所定位置の適度な荷重での押下を検知できるようにした静電容量検出型入力装置を提供することにある。
【課題を解決するための手段】
【0008】
本発明の静電容量検出型入力装置は、基板と、この基板に重ねられる導電性ラバーと、この導電性ラバーに一体化された金属製または樹脂製の可動板と、前記導電性ラバーを前記基板に重ねた状態で固定するケース(補強板+フレーム)とを備え、
前記基板は、円周が分割された複数の円弧状の電極と、これらの円弧状の電極の表面を被覆する絶縁層と、を有し、
前記導電性ラバーは、前記絶縁層を介して前記固定電極に対向し、前記基板の方向への荷重に応じて変形して、前記円弧状の電極との間に生じる静電容量を変化させるための、外周から中心に向かって間隙が漸次拡大するテーパー形状部を有し、
前記円弧状の電極は、放射方向に外方へ延びる複数の櫛歯状電極部とそれらの櫛歯状電極部を内周寄りの位置で繋ぐ連結部とを有する櫛型電極であり、
前記櫛歯状電極部の幅と間隔は2倍以上異なることがない、ことを特徴としている。
【0009】
前記櫛歯状電極部の放射方向の長さは幅の2倍以上であることが好ましい。
【0010】
前記櫛歯状電極部の放射方向の長さは前記連結部の放射方向の幅より長いことが好ましい。
【発明の効果】
【0011】
本発明によれば、低荷重域の押下量に対する静電容量の変化量が小さくできるので、操作者は低荷重での操作がやりやすくなる。また、櫛形電極の長さや幅を変更することで、感度がコントロールでき、感度設定の自由度が高い、という効果を奏する。
【図面の簡単な説明】
【0012】
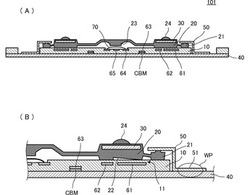
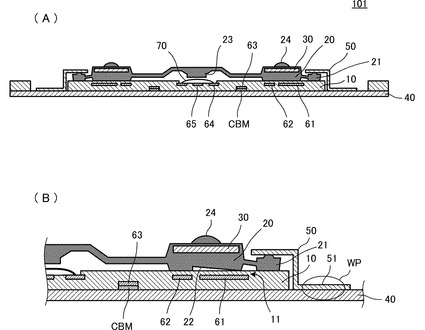
【図1】図1(A)は本発明の実施形態である静電容量検出型入力装置101の断面図、図1(B)はその部分拡大図である。
【図2】図2は、図1に示した静電容量検出型入力装置に操作面シートを被せた状態での断面図である。
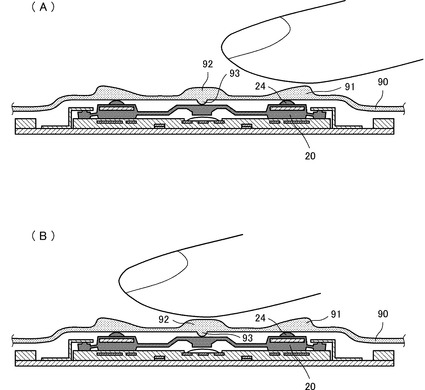
【図3】図3(A)はXY面方向の入力操作時の指の位置を示す図、図3(B)はZ軸方向の入力操作時の指の位置を示す図である。
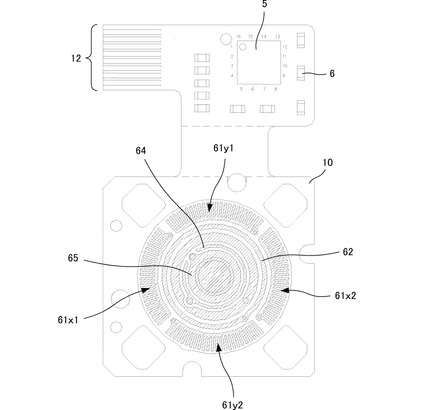
【図4】図4は本発明の実施形態である静電容量検出型入力装置が備えるフレキシブル基板10の平面図である。
【図5】図5(A)は、静電容量検出型入力装置101の平面図、図5(B)はその側面図、図5(C)はその断面図である。
【図6】図6は本発明の実施形態である静電容量検出型入力装置が備えるフレキシブル基板10の平面図であり、特に固定電極の形状および寸法について示す図である。
【図7】図7は導電性ラバー20と固定電極61との位置関係、および導電性ラバー20の変形について示す図である。
【図8】図8はコントロール用ICチップ5の構成を示すブロック図である。
【図9】図9は静電容量検出型入力装置101の操作量と出力値との関係を示す図であり、図9(A)はXY面方向の入力操作時の特性、図9(B)はZ軸方向の入力操作時の特性をそれぞれ示している。
【図10】図10は、フレキシブル基板10に対する、導電性ラバー20のテーパー形状部22の対向面位置を示す図である。
【図11】図11(A)は、固定電極61の形成精度や組立精度の影響を示す図である。図11(B)は荷重に対する出力感度の特性を示す図である。
【発明を実施するための形態】
【0013】
本発明の実施形態である静電容量検出型入力装置について各図を参照しながら説明する。
図1(A)は本発明の実施形態である静電容量検出型入力装置101の断面図、図1(B)はその部分拡大図である。この静電容量検出型入力装置101は、フレキシブル基板10と、このフレキシブル基板10に重ねられる導電性ラバー20と、この導電性ラバー20に一体化された金属製または樹脂製のリング状の可動板30と、導電性ラバー20をフレキシブル基板10に重ねた状態で固定するフレーム50および補強板40を備えている。このフレーム50および補強板40によって、導電性ラバー20をフレキシブル基板10に重ねた状態で固定するケースを構成している。フレキシブル基板10は、複数の固定電極61およびZ軸方向検出電極62等と、これらの電極の表面を被覆する絶縁層11とを有する。
【0014】
導電性ラバー20は絶縁層11を介して固定電極61およびZ軸方向検出電極62に対向するテーパー形状部22を有する。このテーパー形状部22は、導電性ラバー20の外周から中心に向かって間隙の大きさが漸次拡大する形状である。このテーパー形状部22は、フレキシブル基板10方向への荷重に応じて変形して、固定電極61およびZ軸方向検出電極62との間に生じる静電容量を変化させる。そのため、外周から中心に向かって間隙の大きさが漸次変化するテーパー形状をなしている。
【0015】
フレキシブル基板10にはグランド電極63が形成されていて、導電性接着剤CBMを介してSUS(ステンレススチール)製の補強板40と電気的に導通している。この導電性接着剤CBMはフレキシブル基板10の下面の全面に塗布されていて、フレキシブル基板10はこの導電性接着剤CBMで補強板40に貼付されている。
【0016】
SUS(ステンレススチール)製のフレーム50は導電性ラバー20のリム(外縁部)21をフレキシブル基板10へ押しつけて、導電性ラバー20をフレキシブル基板10に固定するとともに電気的に導通する。また、このフレーム50の脚部51は補強板40に対して溶接固定部WPで抵抗溶接されている。これにより電気的機械的に接続されている。
【0017】
フレキシブル基板10には中心押下検出電極64、中心電極65が形成されていて、これらの上部にドーム状板70が配置されている。導電性ラバー20にはドーム状板70に接する位置に中央突起部23が形成されている。さらに導電性ラバー20の可動板30の上部にリング状(断面かまぼこ状)突起部24が形成されている。
導電性ラバー20と可動板30はインサートモールド成型によって一体成型されている。
【0018】
図2は、図1に示した静電容量検出型入力装置101に操作面シートを被せた状態での断面図である。操作面シート90には、静電容量検出型入力装置101の導電性ラバー20のうちリング状突起部24の対応位置にリング状の突起部91、および導電性ラバー20の中央部分の対応位置に突起部92がそれぞれ形成されている。リング状の突起部24に対して操作面シート90の平面部が当接する。この操作面シート90のリング状の突起部91を操作することによってジョグ操作(回転操作)や所定方向(XY面方向)の入力ができる。また、操作面シート90の中央の突起部92を押下することによってフレキシブル基板10に対して垂直方向(Z軸方向)への操作ができる。この中央の突起部92をさらに強く押下すると、中心押下検出電極64、中心電極65およびドーム状板70によるスイッチ操作(確定操作などの単純なスイッチ操作)ができる。
【0019】
図3(A)は前記XY面方向の入力操作時の指の位置を示している。また、図3(B)は前記Z軸方向の入力操作時の指の位置を示している。
【0020】
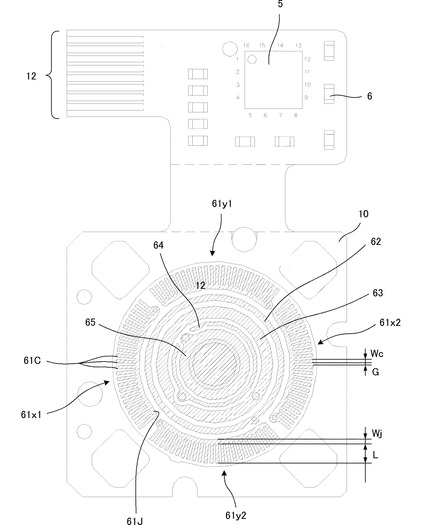
図4は前記フレキシブル基板10の平面図である。固定電極61は、この例では円周が4分割された4つの円弧状の固定電極61x1,61x2,61y1,61y2で構成されている。フレキシブル基板10にはコントロール用ICチップ5やチップコンデンサ6等の電子部品が搭載されている。コントロール用ICチップ5は、4つの固定電極61x1,61x2,61y1,61y2のそれぞれとグランドとの間に生じる静電容量を検出することによって、前記ジョグ操作または方向の入力操作時の押下位置を検知する。またコントロール用ICチップ5は、Z軸方向検出電極62とグランドとの間に生じる静電容量を検出することによって、Z軸方向の押下量を検知する。さらに、コントロール用ICチップ5は、中心押下検出電極64と中心電極65との導通検出によって前記ドーム状板70の押下を検知する。フレキシブル基板10の端部には端子引出部12が形成されていて、外部の回路はこの端子引出部12の信号(データ)を入力することによって操作者の入力操作を読み取る。
【0021】
図5(A)は、静電容量検出型入力装置101の平面図、図5(B)はその側面図、図5(C)はその断面図である。フレーム50は4つの脚部51で補強板40に固定されている。補強板40は導電性ラバー20の対向位置に設けられていて、電子部品の搭載位置の下面に樹脂板80が配置されている。
【0022】
図6は図4と同じくフレキシブル基板10の平面図であるが、ここでは特に固定電極の形状および寸法について示している。固定電極61x1,61x2,61y1,61y2は、放射方向に外方へ延びる複数の櫛歯状電極部61Cとそれらの櫛歯状電極部61Cを内周寄りの位置で繋ぐ連結部61Jとを有する櫛型電極である。そして櫛歯状電極部61Cの幅Wcと間隔Gは2倍以上異なることがない。すなわち、G/2<Wc<2Gの関係を満たす。図6に表れているように、櫛歯状電極部61Cの幅Wcと間隔Gはほぼ等しい(G≒Wcである)ことが好ましい。
【0023】
また、櫛歯状電極部61Cの幅Wcに対する放射方向の長さLは2倍以上であることが好ましい。すなわち、櫛歯状電極部61Cの幅Wcに対する放射方向の長さLが2倍以上である程度に櫛歯状電極部61Cが細長く形成されていることが好ましい。この理由については後述する。
【0024】
また、櫛歯状電極部61Cの放射方向の長さLは連結部61Jの幅Wjより長い。図6に表れているように、櫛歯状電極部61Cの放射方向の長さLは連結部61Jの幅Wjより2倍以上長い(L>2Wjである)ことが好ましい。
【0025】
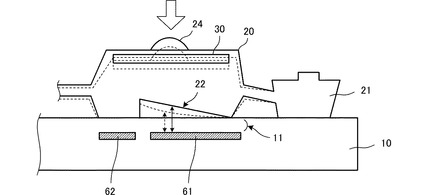
図7は導電性ラバー20と固定電極61との位置関係、および導電性ラバー20の変形について示す図である。リング状突起部24が押下されると、導電性ラバー20のテーパー形状部22が変形して、このテーパー形状部22の面と固定電極61との間の静電容量が増大方向に変化する。この静電容量はテーパー形状部22の面と固定電極61との対向面積に比例するので、固定電極61に櫛歯状電極部61C(図6参照)を設けることにより、この固定電極61と導電性ラバー20との対向面積を小さくでき、押下量に対する静電容量の変化比を小さくできる。そして、櫛歯状電極部61Cの幅Wcと間隔Gがほぼ等しいことにより、低荷重域の静電容量変化を緩やかにすることができるため、カーソルを微調整する時の操作感覚が向上する。
【0026】
また、連結部61Jの幅Wjより櫛歯状電極部61Cの長さLを長くすることにより(図6参照)、導電性ラバー20は固定電極61のうちの大部分である櫛歯状電極部61Cと対向することになる。その結果、連結部61J部分(ベタ電極部分)が導電性ラバー20で形成されるテーパー形状部22の電極間距離の大きな部分に配置されることになり、導電性ラバー20と固定電極61等との相対位置がずれても、電極間距離は大きいままである。すなわち位置ずれによる静電容量値の変化は小さくなり、組立時に発生する位置ずれに対して静電容量の変化が小さい、ロバストな特性が得られる。
【0027】
また、テーパー形状部22の面と固定電極61との間の静電容量は、テーパー形状部22の面と固定電極61との間の距離の二乗に比例するが、リング状突起部24の押下とともにテーパー形状部22の面は図7に表れているように湾曲するので、テーパー形状部22の面と固定電極61との間の距離変化は次第に緩やかになる。そのため、このテーパー形状部22の面の変形によっても、押下量に対する静電容量の変化比が緩やかになる。
【0028】
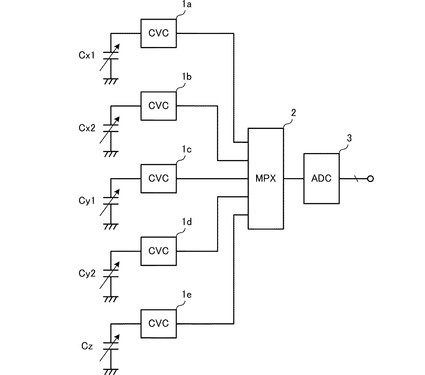
図8は図6等に示したコントロール用ICチップ5の構成を示すブロック図である。図8において、容量Cx1,Cx2は、固定電極61x1,61x2とグランドとの間の静電容量である。また、容量Cy1,Cy2は、固定電極61y1,61y2とグランドとの間の静電容量である。さらに、容量Czは、Z軸方向検出電極62とグランドとの間の静電容量である。容量−電圧変換回路1a,1b,1c,1d,1eは、容量Cx1,Cx2,Cy1,Cy2,Czに対応する電圧をそれぞれ発生する。マルチプレクサ2は容量−電圧変換回路1a〜1eを選択し、ADコンバータ3はマルチプレクサ2で選択された電圧をディジタルデータに変換する。
【0029】
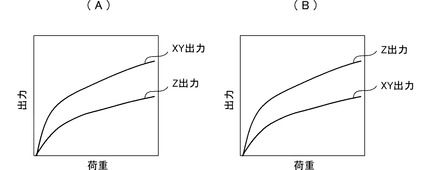
図9はこの実施形態の静電容量検出型入力装置101の操作量と出力値との関係を示す図である。図9(A)はXY面方向の入力操作時の特性、図9(B)はZ軸方向の入力操作時の特性である。いずれも横軸は荷重(押下方向への荷重)、縦軸は静電容量に相当する値である。また、「XY出力」はXY面方向の入力に相当する成分の出力、「Z出力」はZ軸方向の入力に相当する成分の出力である。
【0030】
XY面方向の入力操作時に、X軸方向の成分は、図6に示したX軸方向に対をなす固定電極61x1,61x2とグランドとの間の静電容量の差分で求められ、Y軸方向の成分は、図6に示したY軸方向に対をなす固定電極61y1,61y2とグランドとの間の静電容量の差分で求められる。図9では、前記X軸方向成分とY軸方向成分の二乗平均をとった値で表している。また、Z軸方向の押下量は図6に示したZ軸方向検出電極62とグランドとの間の静電容量で求められる。
【0031】
XY面方向の入力操作時は、図9(A)に表れているように、Z軸方向検出電極62と導電性ラバー20とは局部的に近接するだけであるので、荷重に対する出力変化は小さい。そのため、Z出力よりXY出力が上回る。一方、XY軸方向の入力操作時は、X軸方向成分とY軸方向成分は共にキャンセルされるので、図9(B)に表れているように、XY出力よりZ出力が上回る。
【0032】
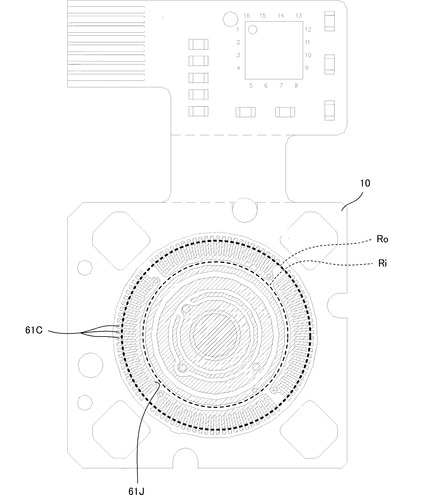
図10は、フレキシブル基板10に対する、導電性ラバー20のテーパー形状部22(図1参照)の対向面位置を示す図である。導電性ラバー20のテーパー形状部22はフレキシブル基板10に対して破線のリング状部分に対向する。すなわち、このリング状の対向面の外縁Roは放射方向に延びる櫛歯状電極部61Cの途中部分で交差し、内縁Riは連結部61Jより内側の位置をとおる。
【0033】
このような関係であるので、フレキシブル基板10に対する固定電極61(櫛歯状電極部61Cおよび連結部61J)の形成位置精度、フレキシブル基板10に対する導電性ラバー20の載置位置精度に応じて前記リング状の対向面がずれても、外縁Roが放射方向に延びる櫛歯状電極部61Cの途中部分で交差し、内縁Riが連結部61Jより内側の位置をとおる限り、電極面積が大きい連結部61Jがテーパー形状部22の電極間距離の大きい部分に入っているため、静電容量変化が鈍く、荷重に対する静電容量の変化特性は殆ど一定となる。そのため、固定電極61の形成精度や組立精度の影響を殆ど受けずに安定した特性が確保できる。
【0034】
また、櫛歯状電極部61Cの幅Wcに対する放射方向の長さLが2倍以上である程度に櫛歯状電極部61Cが細長く形成されていると、テーパー形状部22と櫛歯状電極部61Cとの電極間距離の小さな領域(静電容量変化の感度の高い部分)での導電性ラバー20との対向面積を常に一定に保つことができる。すなわち、導電性ラバー20を組み立てる際に位置ずれが発生すると、導電性ラバー20と櫛歯状電極部61Cとの相対位置がずれることになるが、最も感度の高い部分は櫛歯を長くしているので、位置ずれの影響を吸収する役割を果たし、位置ズレが発生しても静電容量変化の感度の高い部分の面積を一定に保つことができる。結果として位置ずれに対して出力の安定したセンサが得られる。
【0035】
ここで、仮に、櫛歯状電極部61Cの放射方向の長さLが連結部61Jの幅Wjと同程度か、短いとすると、また、櫛歯状電極部61Cの幅Wcに対する放射方向の長さLが2倍に満たない程度に櫛歯状電極部61Cが太く形成されていると、固定電極61の形成精度や組立精度の影響を受けやすい。
【0036】
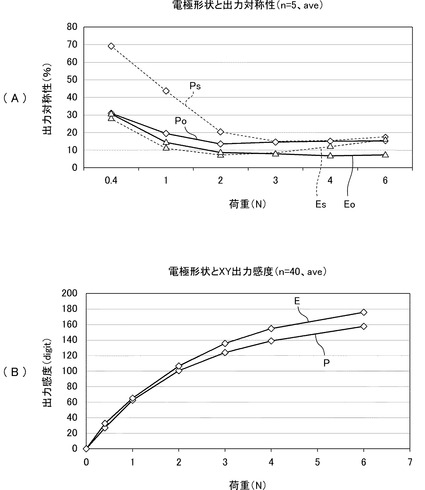
図11(A)は、固定電極61の形成精度や組立精度の影響を示す図である。図11(A)の横軸は荷重、縦軸は出力対称性の比率(バランスのずれ量)である。特性Eoは本発明の実施形態の静電容量検出型入力装置において、固定電極61と導電性ラバー20との位置ずれが無い場合の特性、特性Esは本発明の実施形態の静電容量検出型入力装置において、固定電極61と導電性ラバー20との位置を0.15mmだけずらした場合の特性である。また、特性Poは比較対照の静電容量検出型入力装置において、固定電極61と導電性ラバー20との位置ずれが無い場合の特性、特性Psは比較対照の静電容量検出型入力装置において、固定電極61と導電性ラバー20との位置を0.15mmだけずらした場合の特性である。いずれも5個のサンプルについて求めた平均値である。ここで、比較対照の静電容量検出型入力装置の櫛歯状電極部61Cの間隔Gは幅Wcの3倍、櫛歯状電極部61Cの幅Wcに対する放射方向の長さLは1倍、櫛歯状電極部61Cの放射方向の長さLは連結部61Jの幅Wjと等しい。
【0037】
図11(A)に表れているように、比較対照の静電容量検出型入力装置では、固定電極61と導電性ラバー20との位置が0.15mmずれただけでも、0.4〜2Nという低荷重での出力対称性が悪い。これに対して本発明の静電容量検出型入力装置では、固定電極61と導電性ラバー20との位置ずれに対する出力対称性が、0.4〜6Nという広い荷重範囲で安定した特性が得られることがわかる。
【0038】
図11(B)は荷重に対する出力感度の特性を示す図である。横軸は荷重、縦軸は出力感度をdigit値で表している。特性Eは本発明の静電容量検出型入力装置の特性、特性Pは比較対照の静電容量検出型入力装置の特性である。いずれも40個のサンプルについて求めた平均値である。本発明の静電容量検出型入力装置では、低荷重域(0〜2N)において、比較対照の静電容量検出型入力装置の特性Pと同等の特性が得られることがわかる。
【0039】
このように出力感度に影響を与えることなく、固定電極61の形成精度や組立精度に対する出力対称性を高めることができる。
【0040】
なお、本発明の実施形態によれば、補強板40、フレーム50および導電性ラバー20が回路のグランドと同電位になるので、ノイズの影響を受けにくい。また、基板上に形成されたグランド電極パターンに対して直接グランド接続を行おうとすると、どのような方法で固着してもグランド電極パターンが剥離するため長期信頼性を得難いが、本発明の実施形態のように、フレキシブル基板10の下面の全面が補強板40に貼付された構造であると接着面積を多くとることができ、且つ操作時に剥離する方向に力が加わらないため長期信頼性が向上する。さらに、フレーム50を補強板40に抵抗溶接したことにより、例えばはんだ付けに比べて、繰り返し操作によるクラックが入ることがなく、長期信頼性が向上する。
【符号の説明】
【0041】
CBM…導電性接着剤
Cx1,Cx2,Cy1,Cy2,Cz…容量
G…間隔
L…長さ
Ri…内縁
Ro…外縁
Wc…幅
Wj…幅
WP…溶接固定部
1a,1b,1c,1d,1e…容量−電圧変換回路
2…マルチプレクサ
3…ADコンバータ
5…コントロール用ICチップ
6…チップコンデンサ
10…フレキシブル基板
11…絶縁層
12…端子引出部
20…導電性ラバー
22…テーパー形状部
23…中央突起部
24…リング状突起部
30…可動板
40…補強板
50…フレーム
51…脚部
61…固定電極
61C…櫛歯状電極部
61J…連結部
61x1,61x2,61y1,61y2…固定電極
62…Z軸方向検出電極
63…グランド電極
64…中心押下検出電極
65…中心電極
70…ドーム状板
80…樹脂板
90…操作面シート
91…突起部
92…突起部
101…静電容量検出型入力装置
【技術分野】
【0001】
本発明は、操作者の入力操作によって変化する静電容量の変化を検出して入力操作を検知する静電容量検出型入力装置に関する。
【背景技術】
【0002】
表面に水平方向の入力を感知する複数の電極をそれぞれ円周方向に分割して設けた固定電極と、その固定電極との間にギャップを有して対向する部分に導電性の可動電極を設け、入力操作により可動電極が弾性変形してギャップが変化する弾性体と、この弾性体に突出形成した連結部に連結可能なキートップとを備え、固定電極上に絶縁膜を形成し、可動電極は、固定電極と対向する部分が固定電極の外周部寄りから中心部に向けてギャップの大きさが異なるテーパー状に形成した入力装置が特許文献1に示されている。
【0003】
また、補強板をインサート成形した導電性ラバーと、このラバーが対向する位置に電極が形成された基板と、導電性ラバーを収容するケースを備えた入力装置が特許文献2に示されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2002−8495号公報
【特許文献2】国際公開WO2007/057943号
【発明の概要】
【発明が解決しようとする課題】
【0005】
特許文献1の入力装置においては、固定電極と可動電極との間隔変化に対する静電容量変化が急峻であるので、低荷重の押下でも検知されてしまい、微妙な押圧力の違いによる入力操作を検知し難い。
【0006】
また、特許文献2の入力装置においては、ラバーの変形の安定性および復元性が高いが、中心が操作部であるので、例えば円周上の所定位置を押下して水平方向の方向入力操作を行うことはできない。
【0007】
本発明は上述の課題を解決するためになされたものであり、その目的は、円周上の所定位置の適度な荷重での押下を検知できるようにした静電容量検出型入力装置を提供することにある。
【課題を解決するための手段】
【0008】
本発明の静電容量検出型入力装置は、基板と、この基板に重ねられる導電性ラバーと、この導電性ラバーに一体化された金属製または樹脂製の可動板と、前記導電性ラバーを前記基板に重ねた状態で固定するケース(補強板+フレーム)とを備え、
前記基板は、円周が分割された複数の円弧状の電極と、これらの円弧状の電極の表面を被覆する絶縁層と、を有し、
前記導電性ラバーは、前記絶縁層を介して前記固定電極に対向し、前記基板の方向への荷重に応じて変形して、前記円弧状の電極との間に生じる静電容量を変化させるための、外周から中心に向かって間隙が漸次拡大するテーパー形状部を有し、
前記円弧状の電極は、放射方向に外方へ延びる複数の櫛歯状電極部とそれらの櫛歯状電極部を内周寄りの位置で繋ぐ連結部とを有する櫛型電極であり、
前記櫛歯状電極部の幅と間隔は2倍以上異なることがない、ことを特徴としている。
【0009】
前記櫛歯状電極部の放射方向の長さは幅の2倍以上であることが好ましい。
【0010】
前記櫛歯状電極部の放射方向の長さは前記連結部の放射方向の幅より長いことが好ましい。
【発明の効果】
【0011】
本発明によれば、低荷重域の押下量に対する静電容量の変化量が小さくできるので、操作者は低荷重での操作がやりやすくなる。また、櫛形電極の長さや幅を変更することで、感度がコントロールでき、感度設定の自由度が高い、という効果を奏する。
【図面の簡単な説明】
【0012】
【図1】図1(A)は本発明の実施形態である静電容量検出型入力装置101の断面図、図1(B)はその部分拡大図である。
【図2】図2は、図1に示した静電容量検出型入力装置に操作面シートを被せた状態での断面図である。
【図3】図3(A)はXY面方向の入力操作時の指の位置を示す図、図3(B)はZ軸方向の入力操作時の指の位置を示す図である。
【図4】図4は本発明の実施形態である静電容量検出型入力装置が備えるフレキシブル基板10の平面図である。
【図5】図5(A)は、静電容量検出型入力装置101の平面図、図5(B)はその側面図、図5(C)はその断面図である。
【図6】図6は本発明の実施形態である静電容量検出型入力装置が備えるフレキシブル基板10の平面図であり、特に固定電極の形状および寸法について示す図である。
【図7】図7は導電性ラバー20と固定電極61との位置関係、および導電性ラバー20の変形について示す図である。
【図8】図8はコントロール用ICチップ5の構成を示すブロック図である。
【図9】図9は静電容量検出型入力装置101の操作量と出力値との関係を示す図であり、図9(A)はXY面方向の入力操作時の特性、図9(B)はZ軸方向の入力操作時の特性をそれぞれ示している。
【図10】図10は、フレキシブル基板10に対する、導電性ラバー20のテーパー形状部22の対向面位置を示す図である。
【図11】図11(A)は、固定電極61の形成精度や組立精度の影響を示す図である。図11(B)は荷重に対する出力感度の特性を示す図である。
【発明を実施するための形態】
【0013】
本発明の実施形態である静電容量検出型入力装置について各図を参照しながら説明する。
図1(A)は本発明の実施形態である静電容量検出型入力装置101の断面図、図1(B)はその部分拡大図である。この静電容量検出型入力装置101は、フレキシブル基板10と、このフレキシブル基板10に重ねられる導電性ラバー20と、この導電性ラバー20に一体化された金属製または樹脂製のリング状の可動板30と、導電性ラバー20をフレキシブル基板10に重ねた状態で固定するフレーム50および補強板40を備えている。このフレーム50および補強板40によって、導電性ラバー20をフレキシブル基板10に重ねた状態で固定するケースを構成している。フレキシブル基板10は、複数の固定電極61およびZ軸方向検出電極62等と、これらの電極の表面を被覆する絶縁層11とを有する。
【0014】
導電性ラバー20は絶縁層11を介して固定電極61およびZ軸方向検出電極62に対向するテーパー形状部22を有する。このテーパー形状部22は、導電性ラバー20の外周から中心に向かって間隙の大きさが漸次拡大する形状である。このテーパー形状部22は、フレキシブル基板10方向への荷重に応じて変形して、固定電極61およびZ軸方向検出電極62との間に生じる静電容量を変化させる。そのため、外周から中心に向かって間隙の大きさが漸次変化するテーパー形状をなしている。
【0015】
フレキシブル基板10にはグランド電極63が形成されていて、導電性接着剤CBMを介してSUS(ステンレススチール)製の補強板40と電気的に導通している。この導電性接着剤CBMはフレキシブル基板10の下面の全面に塗布されていて、フレキシブル基板10はこの導電性接着剤CBMで補強板40に貼付されている。
【0016】
SUS(ステンレススチール)製のフレーム50は導電性ラバー20のリム(外縁部)21をフレキシブル基板10へ押しつけて、導電性ラバー20をフレキシブル基板10に固定するとともに電気的に導通する。また、このフレーム50の脚部51は補強板40に対して溶接固定部WPで抵抗溶接されている。これにより電気的機械的に接続されている。
【0017】
フレキシブル基板10には中心押下検出電極64、中心電極65が形成されていて、これらの上部にドーム状板70が配置されている。導電性ラバー20にはドーム状板70に接する位置に中央突起部23が形成されている。さらに導電性ラバー20の可動板30の上部にリング状(断面かまぼこ状)突起部24が形成されている。
導電性ラバー20と可動板30はインサートモールド成型によって一体成型されている。
【0018】
図2は、図1に示した静電容量検出型入力装置101に操作面シートを被せた状態での断面図である。操作面シート90には、静電容量検出型入力装置101の導電性ラバー20のうちリング状突起部24の対応位置にリング状の突起部91、および導電性ラバー20の中央部分の対応位置に突起部92がそれぞれ形成されている。リング状の突起部24に対して操作面シート90の平面部が当接する。この操作面シート90のリング状の突起部91を操作することによってジョグ操作(回転操作)や所定方向(XY面方向)の入力ができる。また、操作面シート90の中央の突起部92を押下することによってフレキシブル基板10に対して垂直方向(Z軸方向)への操作ができる。この中央の突起部92をさらに強く押下すると、中心押下検出電極64、中心電極65およびドーム状板70によるスイッチ操作(確定操作などの単純なスイッチ操作)ができる。
【0019】
図3(A)は前記XY面方向の入力操作時の指の位置を示している。また、図3(B)は前記Z軸方向の入力操作時の指の位置を示している。
【0020】
図4は前記フレキシブル基板10の平面図である。固定電極61は、この例では円周が4分割された4つの円弧状の固定電極61x1,61x2,61y1,61y2で構成されている。フレキシブル基板10にはコントロール用ICチップ5やチップコンデンサ6等の電子部品が搭載されている。コントロール用ICチップ5は、4つの固定電極61x1,61x2,61y1,61y2のそれぞれとグランドとの間に生じる静電容量を検出することによって、前記ジョグ操作または方向の入力操作時の押下位置を検知する。またコントロール用ICチップ5は、Z軸方向検出電極62とグランドとの間に生じる静電容量を検出することによって、Z軸方向の押下量を検知する。さらに、コントロール用ICチップ5は、中心押下検出電極64と中心電極65との導通検出によって前記ドーム状板70の押下を検知する。フレキシブル基板10の端部には端子引出部12が形成されていて、外部の回路はこの端子引出部12の信号(データ)を入力することによって操作者の入力操作を読み取る。
【0021】
図5(A)は、静電容量検出型入力装置101の平面図、図5(B)はその側面図、図5(C)はその断面図である。フレーム50は4つの脚部51で補強板40に固定されている。補強板40は導電性ラバー20の対向位置に設けられていて、電子部品の搭載位置の下面に樹脂板80が配置されている。
【0022】
図6は図4と同じくフレキシブル基板10の平面図であるが、ここでは特に固定電極の形状および寸法について示している。固定電極61x1,61x2,61y1,61y2は、放射方向に外方へ延びる複数の櫛歯状電極部61Cとそれらの櫛歯状電極部61Cを内周寄りの位置で繋ぐ連結部61Jとを有する櫛型電極である。そして櫛歯状電極部61Cの幅Wcと間隔Gは2倍以上異なることがない。すなわち、G/2<Wc<2Gの関係を満たす。図6に表れているように、櫛歯状電極部61Cの幅Wcと間隔Gはほぼ等しい(G≒Wcである)ことが好ましい。
【0023】
また、櫛歯状電極部61Cの幅Wcに対する放射方向の長さLは2倍以上であることが好ましい。すなわち、櫛歯状電極部61Cの幅Wcに対する放射方向の長さLが2倍以上である程度に櫛歯状電極部61Cが細長く形成されていることが好ましい。この理由については後述する。
【0024】
また、櫛歯状電極部61Cの放射方向の長さLは連結部61Jの幅Wjより長い。図6に表れているように、櫛歯状電極部61Cの放射方向の長さLは連結部61Jの幅Wjより2倍以上長い(L>2Wjである)ことが好ましい。
【0025】
図7は導電性ラバー20と固定電極61との位置関係、および導電性ラバー20の変形について示す図である。リング状突起部24が押下されると、導電性ラバー20のテーパー形状部22が変形して、このテーパー形状部22の面と固定電極61との間の静電容量が増大方向に変化する。この静電容量はテーパー形状部22の面と固定電極61との対向面積に比例するので、固定電極61に櫛歯状電極部61C(図6参照)を設けることにより、この固定電極61と導電性ラバー20との対向面積を小さくでき、押下量に対する静電容量の変化比を小さくできる。そして、櫛歯状電極部61Cの幅Wcと間隔Gがほぼ等しいことにより、低荷重域の静電容量変化を緩やかにすることができるため、カーソルを微調整する時の操作感覚が向上する。
【0026】
また、連結部61Jの幅Wjより櫛歯状電極部61Cの長さLを長くすることにより(図6参照)、導電性ラバー20は固定電極61のうちの大部分である櫛歯状電極部61Cと対向することになる。その結果、連結部61J部分(ベタ電極部分)が導電性ラバー20で形成されるテーパー形状部22の電極間距離の大きな部分に配置されることになり、導電性ラバー20と固定電極61等との相対位置がずれても、電極間距離は大きいままである。すなわち位置ずれによる静電容量値の変化は小さくなり、組立時に発生する位置ずれに対して静電容量の変化が小さい、ロバストな特性が得られる。
【0027】
また、テーパー形状部22の面と固定電極61との間の静電容量は、テーパー形状部22の面と固定電極61との間の距離の二乗に比例するが、リング状突起部24の押下とともにテーパー形状部22の面は図7に表れているように湾曲するので、テーパー形状部22の面と固定電極61との間の距離変化は次第に緩やかになる。そのため、このテーパー形状部22の面の変形によっても、押下量に対する静電容量の変化比が緩やかになる。
【0028】
図8は図6等に示したコントロール用ICチップ5の構成を示すブロック図である。図8において、容量Cx1,Cx2は、固定電極61x1,61x2とグランドとの間の静電容量である。また、容量Cy1,Cy2は、固定電極61y1,61y2とグランドとの間の静電容量である。さらに、容量Czは、Z軸方向検出電極62とグランドとの間の静電容量である。容量−電圧変換回路1a,1b,1c,1d,1eは、容量Cx1,Cx2,Cy1,Cy2,Czに対応する電圧をそれぞれ発生する。マルチプレクサ2は容量−電圧変換回路1a〜1eを選択し、ADコンバータ3はマルチプレクサ2で選択された電圧をディジタルデータに変換する。
【0029】
図9はこの実施形態の静電容量検出型入力装置101の操作量と出力値との関係を示す図である。図9(A)はXY面方向の入力操作時の特性、図9(B)はZ軸方向の入力操作時の特性である。いずれも横軸は荷重(押下方向への荷重)、縦軸は静電容量に相当する値である。また、「XY出力」はXY面方向の入力に相当する成分の出力、「Z出力」はZ軸方向の入力に相当する成分の出力である。
【0030】
XY面方向の入力操作時に、X軸方向の成分は、図6に示したX軸方向に対をなす固定電極61x1,61x2とグランドとの間の静電容量の差分で求められ、Y軸方向の成分は、図6に示したY軸方向に対をなす固定電極61y1,61y2とグランドとの間の静電容量の差分で求められる。図9では、前記X軸方向成分とY軸方向成分の二乗平均をとった値で表している。また、Z軸方向の押下量は図6に示したZ軸方向検出電極62とグランドとの間の静電容量で求められる。
【0031】
XY面方向の入力操作時は、図9(A)に表れているように、Z軸方向検出電極62と導電性ラバー20とは局部的に近接するだけであるので、荷重に対する出力変化は小さい。そのため、Z出力よりXY出力が上回る。一方、XY軸方向の入力操作時は、X軸方向成分とY軸方向成分は共にキャンセルされるので、図9(B)に表れているように、XY出力よりZ出力が上回る。
【0032】
図10は、フレキシブル基板10に対する、導電性ラバー20のテーパー形状部22(図1参照)の対向面位置を示す図である。導電性ラバー20のテーパー形状部22はフレキシブル基板10に対して破線のリング状部分に対向する。すなわち、このリング状の対向面の外縁Roは放射方向に延びる櫛歯状電極部61Cの途中部分で交差し、内縁Riは連結部61Jより内側の位置をとおる。
【0033】
このような関係であるので、フレキシブル基板10に対する固定電極61(櫛歯状電極部61Cおよび連結部61J)の形成位置精度、フレキシブル基板10に対する導電性ラバー20の載置位置精度に応じて前記リング状の対向面がずれても、外縁Roが放射方向に延びる櫛歯状電極部61Cの途中部分で交差し、内縁Riが連結部61Jより内側の位置をとおる限り、電極面積が大きい連結部61Jがテーパー形状部22の電極間距離の大きい部分に入っているため、静電容量変化が鈍く、荷重に対する静電容量の変化特性は殆ど一定となる。そのため、固定電極61の形成精度や組立精度の影響を殆ど受けずに安定した特性が確保できる。
【0034】
また、櫛歯状電極部61Cの幅Wcに対する放射方向の長さLが2倍以上である程度に櫛歯状電極部61Cが細長く形成されていると、テーパー形状部22と櫛歯状電極部61Cとの電極間距離の小さな領域(静電容量変化の感度の高い部分)での導電性ラバー20との対向面積を常に一定に保つことができる。すなわち、導電性ラバー20を組み立てる際に位置ずれが発生すると、導電性ラバー20と櫛歯状電極部61Cとの相対位置がずれることになるが、最も感度の高い部分は櫛歯を長くしているので、位置ずれの影響を吸収する役割を果たし、位置ズレが発生しても静電容量変化の感度の高い部分の面積を一定に保つことができる。結果として位置ずれに対して出力の安定したセンサが得られる。
【0035】
ここで、仮に、櫛歯状電極部61Cの放射方向の長さLが連結部61Jの幅Wjと同程度か、短いとすると、また、櫛歯状電極部61Cの幅Wcに対する放射方向の長さLが2倍に満たない程度に櫛歯状電極部61Cが太く形成されていると、固定電極61の形成精度や組立精度の影響を受けやすい。
【0036】
図11(A)は、固定電極61の形成精度や組立精度の影響を示す図である。図11(A)の横軸は荷重、縦軸は出力対称性の比率(バランスのずれ量)である。特性Eoは本発明の実施形態の静電容量検出型入力装置において、固定電極61と導電性ラバー20との位置ずれが無い場合の特性、特性Esは本発明の実施形態の静電容量検出型入力装置において、固定電極61と導電性ラバー20との位置を0.15mmだけずらした場合の特性である。また、特性Poは比較対照の静電容量検出型入力装置において、固定電極61と導電性ラバー20との位置ずれが無い場合の特性、特性Psは比較対照の静電容量検出型入力装置において、固定電極61と導電性ラバー20との位置を0.15mmだけずらした場合の特性である。いずれも5個のサンプルについて求めた平均値である。ここで、比較対照の静電容量検出型入力装置の櫛歯状電極部61Cの間隔Gは幅Wcの3倍、櫛歯状電極部61Cの幅Wcに対する放射方向の長さLは1倍、櫛歯状電極部61Cの放射方向の長さLは連結部61Jの幅Wjと等しい。
【0037】
図11(A)に表れているように、比較対照の静電容量検出型入力装置では、固定電極61と導電性ラバー20との位置が0.15mmずれただけでも、0.4〜2Nという低荷重での出力対称性が悪い。これに対して本発明の静電容量検出型入力装置では、固定電極61と導電性ラバー20との位置ずれに対する出力対称性が、0.4〜6Nという広い荷重範囲で安定した特性が得られることがわかる。
【0038】
図11(B)は荷重に対する出力感度の特性を示す図である。横軸は荷重、縦軸は出力感度をdigit値で表している。特性Eは本発明の静電容量検出型入力装置の特性、特性Pは比較対照の静電容量検出型入力装置の特性である。いずれも40個のサンプルについて求めた平均値である。本発明の静電容量検出型入力装置では、低荷重域(0〜2N)において、比較対照の静電容量検出型入力装置の特性Pと同等の特性が得られることがわかる。
【0039】
このように出力感度に影響を与えることなく、固定電極61の形成精度や組立精度に対する出力対称性を高めることができる。
【0040】
なお、本発明の実施形態によれば、補強板40、フレーム50および導電性ラバー20が回路のグランドと同電位になるので、ノイズの影響を受けにくい。また、基板上に形成されたグランド電極パターンに対して直接グランド接続を行おうとすると、どのような方法で固着してもグランド電極パターンが剥離するため長期信頼性を得難いが、本発明の実施形態のように、フレキシブル基板10の下面の全面が補強板40に貼付された構造であると接着面積を多くとることができ、且つ操作時に剥離する方向に力が加わらないため長期信頼性が向上する。さらに、フレーム50を補強板40に抵抗溶接したことにより、例えばはんだ付けに比べて、繰り返し操作によるクラックが入ることがなく、長期信頼性が向上する。
【符号の説明】
【0041】
CBM…導電性接着剤
Cx1,Cx2,Cy1,Cy2,Cz…容量
G…間隔
L…長さ
Ri…内縁
Ro…外縁
Wc…幅
Wj…幅
WP…溶接固定部
1a,1b,1c,1d,1e…容量−電圧変換回路
2…マルチプレクサ
3…ADコンバータ
5…コントロール用ICチップ
6…チップコンデンサ
10…フレキシブル基板
11…絶縁層
12…端子引出部
20…導電性ラバー
22…テーパー形状部
23…中央突起部
24…リング状突起部
30…可動板
40…補強板
50…フレーム
51…脚部
61…固定電極
61C…櫛歯状電極部
61J…連結部
61x1,61x2,61y1,61y2…固定電極
62…Z軸方向検出電極
63…グランド電極
64…中心押下検出電極
65…中心電極
70…ドーム状板
80…樹脂板
90…操作面シート
91…突起部
92…突起部
101…静電容量検出型入力装置
【特許請求の範囲】
【請求項1】
基板と、この基板に重ねられる導電性ラバーと、この導電性ラバーに一体化された金属製または樹脂製の可動板と、前記導電性ラバーを前記基板に重ねた状態で固定するケースとを備え、
前記基板は、円周が分割された複数の固定電極と、これらの固定電極の表面を被覆する絶縁層と、を有し、
前記導電性ラバーは、前記絶縁層を介して前記固定電極に対向し、前記基板の方向への荷重に応じて変形して、前記固定電極との間に生じる静電容量を変化させるための、外周から中心に向かって間隙が漸次拡大するテーパー形状部を有し、
前記固定電極は、放射方向に外方へ延びる複数の櫛歯状電極部とそれらの櫛歯状電極部を内周寄りの位置で繋ぐ連結部とを有する櫛型電極であり、
前記櫛歯状電極部の幅と間隔は2倍以上異なることがない、
静電容量検出型入力装置。
【請求項2】
前記櫛歯状電極部の放射方向の長さは幅の2倍以上である、請求項1に記載の静電容量検出型入力装置。
【請求項3】
前記櫛歯状電極部の放射方向の長さは前記連結部の放射方向の幅より長い、請求項1または2に記載の静電容量検出型入力装置。
【請求項1】
基板と、この基板に重ねられる導電性ラバーと、この導電性ラバーに一体化された金属製または樹脂製の可動板と、前記導電性ラバーを前記基板に重ねた状態で固定するケースとを備え、
前記基板は、円周が分割された複数の固定電極と、これらの固定電極の表面を被覆する絶縁層と、を有し、
前記導電性ラバーは、前記絶縁層を介して前記固定電極に対向し、前記基板の方向への荷重に応じて変形して、前記固定電極との間に生じる静電容量を変化させるための、外周から中心に向かって間隙が漸次拡大するテーパー形状部を有し、
前記固定電極は、放射方向に外方へ延びる複数の櫛歯状電極部とそれらの櫛歯状電極部を内周寄りの位置で繋ぐ連結部とを有する櫛型電極であり、
前記櫛歯状電極部の幅と間隔は2倍以上異なることがない、
静電容量検出型入力装置。
【請求項2】
前記櫛歯状電極部の放射方向の長さは幅の2倍以上である、請求項1に記載の静電容量検出型入力装置。
【請求項3】
前記櫛歯状電極部の放射方向の長さは前記連結部の放射方向の幅より長い、請求項1または2に記載の静電容量検出型入力装置。
【図1】


【図2】

【図3】
【図4】
【図5】

【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【公開番号】特開2013−20321(P2013−20321A)
【公開日】平成25年1月31日(2013.1.31)
【国際特許分類】
【出願番号】特願2011−151381(P2011−151381)
【出願日】平成23年7月8日(2011.7.8)
【出願人】(000006231)株式会社村田製作所 (3,635)
【Fターム(参考)】
【公開日】平成25年1月31日(2013.1.31)
【国際特許分類】
【出願日】平成23年7月8日(2011.7.8)
【出願人】(000006231)株式会社村田製作所 (3,635)
【Fターム(参考)】
[ Back to top ]